
ネジ孔検査方法およびネジ孔検査装置
【課題】簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができるネジ孔検査方法およびネジ孔検査装置を提供する。
【解決手段】ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、ネジゲージがネジ孔に螺合している状態で、ネジゲージと嵌合するアダプタ12の回転によりネジゲージを中心軸方向に移動させるときに、当該中心軸方向についてアダプタ12とネジゲージとの間に隙間δを有する。
【解決手段】ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、ネジゲージがネジ孔に螺合している状態で、ネジゲージと嵌合するアダプタ12の回転によりネジゲージを中心軸方向に移動させるときに、当該中心軸方向についてアダプタ12とネジゲージとの間に隙間δを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ネジ孔におけるネジ山の精度の検査を行うネジ孔検査方法およびネジ孔検査装置に関するものである。
【背景技術】
【0002】
ネジゲージを用いた被検査物のネジ孔におけるネジ山の精度の検査において、ネジゲージとして例えば限界ネジゲージを用いた検査が行われている。そして、この限界ネジゲージを用いた検査においては、通ネジ(通りゲージ)を用いた検査と止ネジ(止まりゲージ)を用いた検査とが行われる。ここで、通ネジを用いた検査とは、ネジ孔(雌ネジ)の総合有効径が規定の許容限界内にあるか否かを検査するものであり、ネジ孔に通ネジが所定の深さまで螺合するか否か(ねじ作用で嵌め合わせることができるか否か)を検査するものである。また、止ネジを用いたネジ孔の検査とは、ネジ孔(雌ネジ)の実際の有効径が規定の最大寸法よりも小さいか否かを検査するものであり、ネジ孔に止ネジが所定の深さ(例えば、2回転分の深さ)を超えてねじ込まれなければ、ネジ孔は止ネジを用いた検査に合格したことになる。
【0003】
このようにネジゲージを用いて被検査物のネジ孔におけるネジ山の精度の検査として、特許文献1にはネジゲージを被検査物に螺合する際に推力を制御しながらネジ山を検査する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−164349号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここでネジゲージをネジ孔に螺合させる場合、ネジ孔のネジ山の保護の為にネジゲージの1回転当たりの送りピッチをネジ孔のピッチと正確に合わせる必要がある。しかしながら、特許文献1の技術では、移動用モータはネジゲージと軸方向に連結している(相対移動しない)ため、検査において推力を切り換えなければならないポイントが多くあり、制御手段はこのポイント毎に必要な速度やトルクの制御パラメータを高い精度で設定する必要がある。そのため、制御手法が複雑になるとともに、ネジ孔検査装置の構成が複雑になりコストが増大する。また、ネジ孔のピッチには寸法誤差が存在しうるが、この寸法誤差を考慮しながら推力を制御することは非常に難しいので、ネジ孔のネジ山を保護できないおそれがある。
【0006】
そこで、本発明は上記した問題点を解決するためになされたものであり、簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができるネジ孔検査方法およびネジ孔検査装置を提供すること、を課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた本発明の一態様は、ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、前記ネジゲージが前記ネジ孔に螺合している状態で、前記ネジゲージと嵌合するアダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有すること、を特徴とする。
【0008】
この態様によれば、ネジゲージがネジ孔に螺合している状態で、ネジゲージと嵌合するアダプタの回転によりネジゲージを当該ネジゲージの軸方向に移動させるときに、当該軸方向についてアダプタとネジゲージとの間に隙間を有する。これにより、アダプタからネジゲージに対しネジゲージを回転させる力は作用するが、アダプタからネジゲージに対しネジゲージの移動方向に押す、又は引っ張る力は作用しない。したがって、簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【0009】
上記の態様においては、前記隙間は、前記ネジゲージの先端部が前記ネジ孔に螺合したときに、前記軸方向について前記アダプタを前記ネジゲージから離れる側に移動させて形成されること、が好ましい。
【0010】
この態様によれば、アダプタとネジゲージとの間の隙間は、ネジゲージの先端部がネジ孔に螺合したときにネジゲージの軸方向についてアダプタをネジゲージから離れる側に移動させて形成される。このように、アダプタとネジゲージとの間の隙間は、簡単な動作により形成される。そのため、より簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【0011】
上記の態様においては、前記隙間を形成し終えたときに、前記ネジゲージの移動速度を増加させること、が好ましい。
【0012】
この態様によれば、隙間を形成し終えたときにネジゲージの移動速度を増加させるので、その後のネジ孔の検査を短時間で行うことができる。したがって、ネジ孔の検査時間の短縮化を行うことができる。
【0013】
上記の態様においては、前記ネジゲージを前記ネジ孔の奥行き方向に移動させるときに、前記アダプタの回転トルクが所定の閾値を超えたときに前記ネジゲージの先端部が前記ネジ孔のネジ底に達したものと判断して、前記アダプタの回転を一旦停止させた後に前記アダプタの回転方向を逆転させて前記ネジゲージを前記ネジ孔の口元方向に移動させること、が好ましい。
【0014】
この態様によれば、ネジゲージをネジ孔の奥行き方向に移動させるときに、アダプタの回転トルクが所定の閾値を超えたときにネジゲージの先端部がネジ孔のネジ底に達したものと判断する。そして、アダプタの回転を一旦停止させた後に、アダプタの回転方向を逆転させてネジゲージをネジ孔の口元方向に移動させる。これにより、ネジ孔のネジ底を保護しつつネジ孔の検査を行うことができる。
【0015】
上記の態様においては、前記ネジゲージを前記ネジ孔の奥行き方向に移動させた後に前記ネジ孔の口元方向に移動させて前記ネジ孔から開放させるときに、前記アダプタと前記ネジゲージとの間に生じる吸引力により前記軸方向について前記アダプタと前記ネジゲージとを当接させること、が好ましい。
【0016】
この態様によれば、ネジゲージをネジ孔の口元方向に移動させてネジ孔から開放させるときに、アダプタとネジゲージとの間に生じる吸引力によりネジゲージの軸方向についてアダプタとネジゲージとを当接させる。これにより、ネジ孔の検査を終了したときに、容易かつ確実にネジゲージをアダプタにて回収することができる。そのため、ネジ孔の検査の効率化を図ることができる。
【0017】
上記課題を解決するためになされた本発明の他の態様は、ネジゲージを用いてネジ孔を検査するネジ孔検査装置において、前記ネジゲージと嵌合するアダプタと、前記ネジゲージが前記ネジ孔に螺合している状態で、前記アダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有するように制御する制御部と、を有することを特徴とする。
【0018】
この態様によれば、制御部は、ネジゲージがネジ孔に螺合している状態で、アダプタの回転によりネジゲージを当該ネジゲージの軸方向に移動させるときに、当該軸方向についてアダプタとネジゲージとの間に隙間を有するように制御する。これにより、アダプタからネジゲージに対しネジゲージを回転させる力は作用するが、アダプタからネジゲージに対しネジゲージの移動方向に押す、又は引っ張る力は作用しない。したがって、簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【発明の効果】
【0019】
本発明に係るネジ孔検査方法およびネジ孔検査装置によれば、簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【図面の簡単な説明】
【0020】
【図1】ネジ孔検査装置の概略構成図(上面図)である。
【図2】ネジ孔検査装置において、ロボットとアダプタとネジゲージとスタンドの概略構成図(斜視図)である。
【図3】回転軸とアダプタとネジゲージの分解図である。
【図4】ネジ孔検査装置の動作を示すフローチャート図である。
【図5】実施例1においてアダプタの位置と通ネジの先端部の位置とアダプタの回転速度についての時間変化、および各時間における回転軸を駆動させるための電力値を示した図である。
【図6】アダプタと通ネジをワークの端面に向かって移動させるときを示す図である。
【図7】図6におけるアダプタと通ネジの嵌合部分の周辺の拡大図である。
【図8】通ネジをワークの端面の位置まで移動させたときを示す図である。
【図9】通ネジがネジ孔の位置に達したときを示す図である。
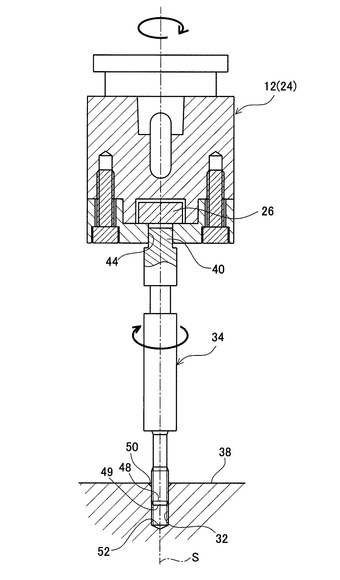
【図10】通ネジがネジ孔に確実に螺合し、アダプタを上昇させてアダプタと通ネジとの間に隙間を形成したときを示す図である。
【図11】図10におけるアダプタと通ネジの嵌合部分の周辺の拡大図である。
【図12】アダプタと通ネジとの間に隙間を有する状態で通ネジをネジ孔の奥行き方向に移動させるときを示す図である。
【図13】通ネジがネジ孔のネジ底に到達したときを示す図である。
【図14】通ネジをネジ孔の口元方向に移動させるときを示す図である。
【図15】通ネジをネジ孔から抜いて開放させたときを示す図である。
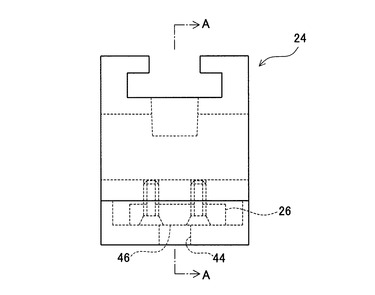
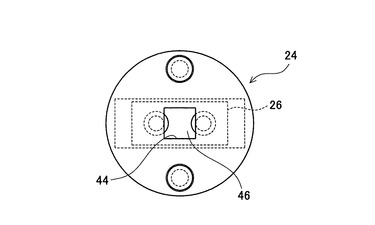
【図16】アダプタの正面図である。
【図17】アダプタの下面図である。
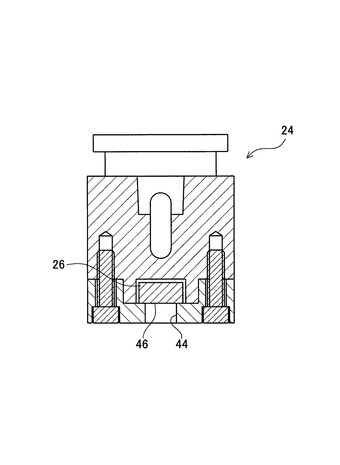
【図18】図16のA−A断面図である。
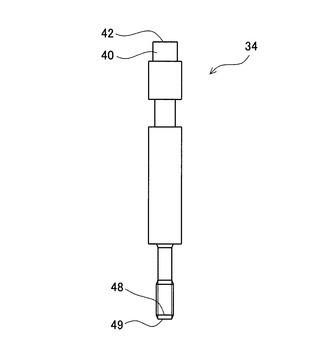
【図19】ネジゲージの正面図である。
【図20】ネジゲージの上面図である。
【図21】実施例2においてアダプタの位置と通ネジの先端部の位置とアダプタの回転速度についての時間変化、および各時間における回転軸を駆動させるための電力値を示した図である。
【発明を実施するための形態】
【0021】
以下、本発明を具体化した実施例について、添付図面を参照しつつ詳細に説明する。
【0022】
〔ネジ孔検査装置の構成について〕
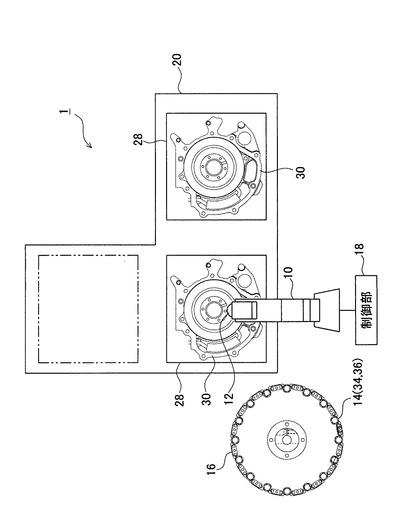
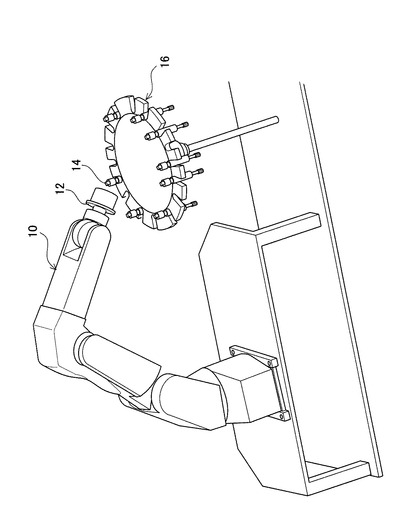
まず、ネジ孔検査装置1の構成について説明する。図1〜図3に示すように、ネジ孔検査装置1は、ロボット10と、アダプタ12と、ネジゲージ14と、スタンド16、制御部18と、搬送部20などから構成される。このネジ孔検査装置1は、詳しくは後述するように、ネジゲージ14を用いてワーク30のネジ孔32のネジ山の精度を検査するものである。
【0023】
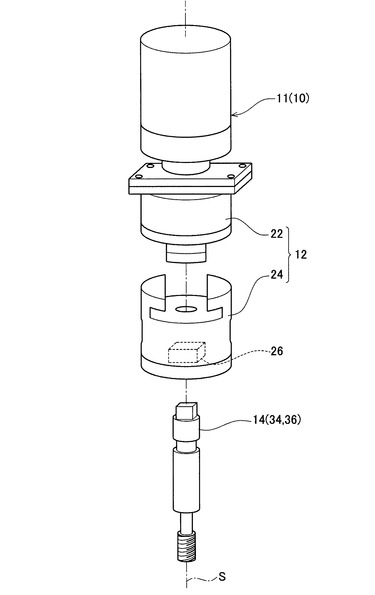
ロボット10は、アダプタ12を駆動するための手段であり、図3に示すように中心軸Sを中心にアダプタ12を回転させる回転軸11を備えている。アダプタ12は、ネジゲージ14と嵌合している。そして、中心軸Sを中心にアダプタ12を回転させることにより、中心軸Sを中心にネジゲージ14を回転させることができる。そのため、アダプタ12を回転させることにより、ネジゲージ14をワーク30のネジ孔32に螺合させて(ねじ作用で嵌め合わせて)移動させることができる。なお、中心軸Sは、アダプタ12とネジゲージ14の中心軸である。
【0024】
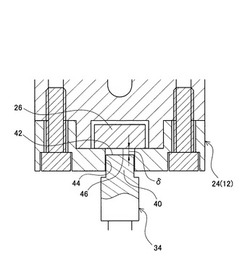
また、アダプタ12は、オスアダプタ22とメスアダプタ24とを備えている。そして、例えばメスアダプタ24に備わるモールステーパが形成されたテーパ孔部とオスアダプタ22に備わるテーパシャンク部と嵌め合わすことにより、オスアダプタ22とメスアダプタ24とを一体にすることができる。なお、メスアダプタ24は、マグネット26を備えている。
【0025】
ネジゲージ14は、搬送部20により搬送されるパレット28に載せられたワーク30のネジ孔32のネジ山の精度を検査するための治具であり、例えば、通ネジ34(通りゲージ)や止ネジ36(止まりゲージ)などである。
【0026】
スタンド16は、複数のネジゲージ14を保管しておくための台である。制御部18は、ネジ孔検査装置1の動作を制御する手段であり、後述するネジ孔検査方法においてネジ孔の検査における動作を制御する。
【0027】
〔ネジ孔検査装置の動作について〕
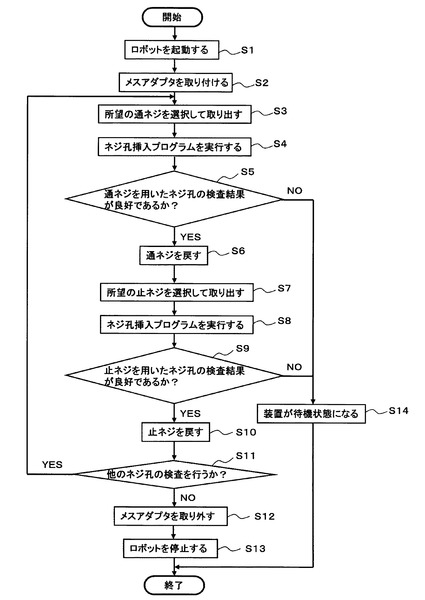
以上のような構成のネジ孔検査装置1は、ワーク30のネジ孔32を検査するとき、図4のフローチャート図で示されるような動作を行う。まず、ロボット10を起動し(ステップS1)、メスアダプタ24を保管する不図示のスタンドから所望のメスアダプタ24を取り出して、当該メスアダプタ24をロボット10の回転軸11に接続するオスアダプタ22に嵌合させて取り付ける(ステップS2)。
【0028】
次に、検査対象となるネジ孔32に適合した所望の通ネジ34をスタンド16から選択して取り出す(ステップS3)。次に、通ネジ34を用いてネジ孔32の検査を行うネジ孔検査方法について規定した通ネジ用のネジ孔挿入プログラムを実行し(ステップS4)、通ネジ34を用いてネジ孔32のネジ山の精度の検査を行う。なお、本発明における通ネジ34を用いてネジ孔32の検査を行うネジ孔検査方法の詳細については後述する。
【0029】
次に、通ネジ34を用いたネジ孔32の検査結果の良否を判断する(ステップS5)。そして、通ネジ34を用いたネジ孔32の検査結果が良好な場合(すなわち、ネジ孔32に通ネジ34が所定の深さまで螺合して、ネジ孔32の総合有効径が規定された許容限界内にあるとの検査結果が得られた場合)には、通ネジ34をスタンド16におけるもとの位置に戻す(ステップS6)。
【0030】
このようにステップS6において通ネジ34をスタンド16におけるもとの位置に戻した後、検査対象となるネジ孔32に適合した所望の止ネジ36をスタンド16から選択して取り出す(ステップS7)。次に、止ネジ36を用いてネジ孔32の検査を行うネジ孔検査方法について規定した止ネジ用のネジ孔挿入プログラムを実行し(ステップS8)、止ネジ36を用いてネジ孔32のネジ山の精度の検査を行う。
【0031】
次に、止ネジ36を用いたネジ孔32の検査結果の良否を判断する(ステップS9)。そして、止ネジ36を用いたネジ孔32の検査結果が良好な場合(すなわち、ネジ孔32に止ネジ36が所定の深さ(例えば、止ネジ36が2回転したときの深さ)を超えてねじ込まれなかったことから、合格との検査結果が得られた場合)には、止ネジ36をスタンド16におけるもとの位置に戻す(ステップS10)。
【0032】
次に、ワーク30における他のネジ孔の検査を行うか否かを判断する(ステップS11)。そして、ワーク30における他の孔径のネジ孔の検査を行う場合にはステップS3に戻る。一方、ワーク30における他の孔径のネジ孔の検査を行わない場合には、オスアダプタ22からメスアダプタ24を取り外して、このメスアダプタ24をアダプタ用のスタンド(不図示)のもとの位置に戻す(ステップS12)。そして、ロボット10を停止する(ステップS13)。
【0033】
なお、ステップS5において通ネジ34を用いたネジ孔32の検査結果の良否を判断した結果、通ネジ34を用いたネジ孔32の検査結果が良くない場合には、ネジ孔検査装置1は待機状態になる(ステップS14)。また、ステップS9において止ネジ36を用いたネジ孔32の検査結果の良否を判断した結果、止ネジ36を用いたネジ孔32の検査結果が良くない場合には、ネジ孔検査装置1は待機状態になる(ステップS14)。このように、ネジ孔検査装置1は、ワーク30のネジ孔32を検査するに際して以上のような動作を行う。
【0034】
〔ネジ孔検査方法について〕
次に、前記のようにネジ孔挿入プログラムにおいて規定されているネジゲージ14を用いてネジ孔32の精度の検査を行うネジ孔検査方法の詳細について説明する。ここでは、主にネジゲージ14として通ネジ34を例に挙げ、通ネジ34を用いてネジ孔32の精度の検査を行うネジ孔検査方法について説明する。なお、本発明のネジ孔検査方法における各部品の動作は、前記のネジ孔検査装置1の制御部18により制御される。
【0035】
<実施例1>
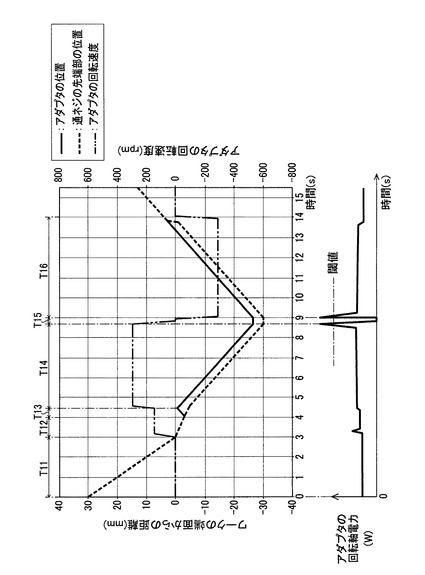
まず、実施例1について説明する。ここで、図5は、実施例1においてアダプタ12の位置と通ネジ34の先端部48(詳しくは、最先端部49)(図6参照)の位置とアダプタ12の回転速度についての時間変化、および各時間における回転軸11を駆動させるための電力値を示した図である。この図5は、横軸が時間(単位はs)を示し、縦軸がワーク30の端面38(図6参照)からの距離(単位はmm)やアダプタ12の回転速度(単位はrpm)や回転軸11を駆動させるための電力値(単位はW)を示している。なお、ここでは、一例として、ネジ孔32について、ネジの呼び径を8mm、ピッチを1.25mm、深さを30mmとする。
【0036】
なお、図5において、アダプタ12の位置は通ネジ34の先端部48(詳しくは、最先端部49)の位置を基準の位置として示しており、詳細には、ワーク30の端面38からアダプタ12までの距離を、ワーク30の端面38からアダプタ12の奥行き面46(図7参照)までの実際の距離から通ネジ34の中心軸S方向の長さを引いた距離として示している。そのため、図5において、アダプタ12の奥行き面46と通ネジ34の端面42(図7参照)とが当接しているときはアダプタ12の位置と通ネジ34の位置とが重なって示され、アダプタ12の奥行き面46と通ネジ34の端面42とが離間して隙間を生じているときはアダプタ12の位置と通ネジ34の位置とが前記の隙間の大きさだけずれて示されることになる。
【0037】
また、図6〜図15は、アダプタ12と通ネジ34とワーク30(ネジ孔32)との位置関係を示した図である。なお、図6〜図15において、説明の便宜上、アダプタ12のうちメスアダプタ24のみを示しており、オスアダプタ22を省略している。
【0038】
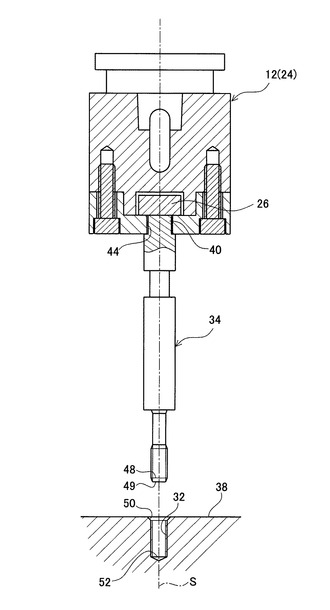
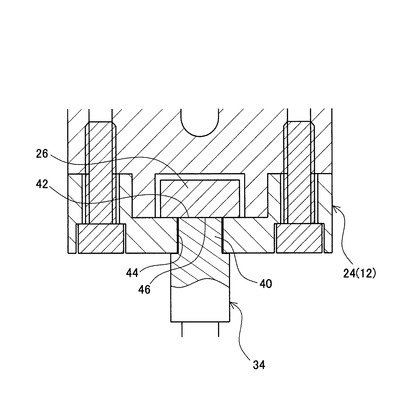
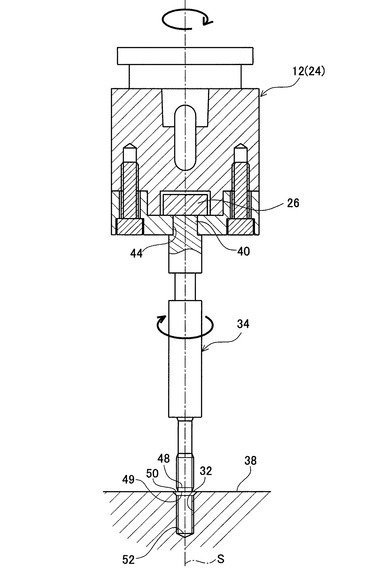
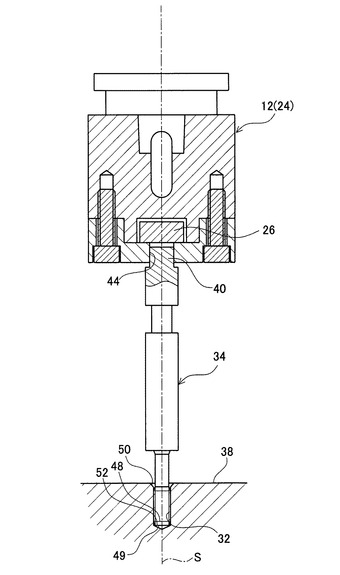
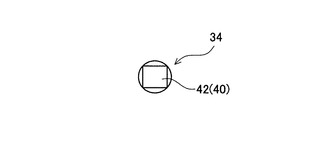
まず、図6に示すように、アダプタ12と通ネジ34をワーク30の端面38に向かって移動させる(図5に示す時間領域T11)。図5に示す例では、時間=0s〜3sにおいて、通ネジ34の先端部48をワーク30の端面38からの距離が30mmとなる位置から0mmとなる位置まで移動させる。このとき、アダプタ12を回転させていない。また、このとき、図7に示すように、マグネット26の磁力によって通ネジ34の端部40の端面42をアダプタ12の嵌合部44の奥行き面46(本実施例では、マグネット26の一部の面)に吸着させて、中心軸S方向について通ネジ34の端面42とアダプタ12の奥行き面46とを当接させた状態としている。
【0039】
次に、図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させた後、さらにアダプタ12と通ネジ34をネジ孔32に向かって移動させ、図9に示すように通ネジ34の先端部48がネジ孔32に螺合し始める(図5に示す時間領域T12)。図5に示す例では、時間=3s〜4sにおいて、通ネジ34の先端部48をワーク30の端面38からの距離が0mmとなる位置から−3mmとなる位置まで移動させる。このとき、アダプタ12を低い回転速度(図5に示す例では一例として144rpm)で回転(正回転)させ、アダプタ12の中心軸S方向の移動速度を時間領域T11のときよりも減少させている。また、このとき、前記の時間領域T11と同様に、図7に示すように通ネジ34の端面42とアダプタ12の奥行き面46とを当接させた状態にしている。
【0040】
なお、ワーク30のネジ孔32の口元部分には面取り部50が設けられているので、図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させた時には、通ネジ34の先端部48は未だネジ孔32に螺合していない。そして、その後、通ネジ34の先端部48が面取り部50を通過してネジ孔32に達した時に、図9に示すように通ネジ34の先端部48はネジ孔32に螺合し始める。
【0041】
また、このとき、通ネジ34の先端部48がネジ孔32に螺合し始めたときに、アダプタ12の回転トルクが上昇する。これにより、図5に示すように、アダプタ12を回転させる回転軸11を駆動させるための電力(以下、回転軸電力という)の時間波形に、アダプタ12の回転トルクが上昇した影響が表れる。
【0042】
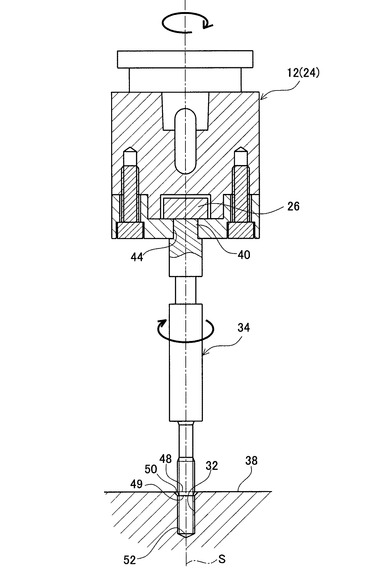
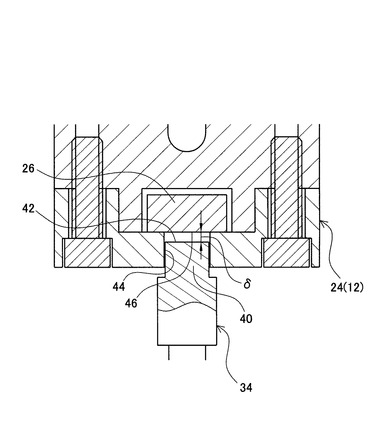
次に、通ネジ34の先端部48がネジ孔32に確実に螺合したとき(図5に示す例においては時間が4sのとき)に、アダプタ12を上昇させる。すなわち、中心軸S方向についてアダプタ12を通ネジ34から離れる側に移動させる。これにより、図10と図11に示すように、中心軸S方向についてアダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δが形成される(図5に示す時間領域T13)。なお、隙間δは、アダプタ12のメスアダプタ24の嵌合部44の中心軸S方向の深さよりも小さくする。また、図10に示すようにネジ孔32の中心軸は中心軸Sと一致している。
【0043】
ここで、「通ネジ34の先端部48がネジ孔32に確実に螺合したとき」とは、通ネジ34の先端部48とネジ孔32との間に発生する締結力がマグネット26の磁力により生じるアダプタ12の奥行き面46と通ネジ34の端面42との吸着力よりも大きくなったとき、である。より具体的には、「通ネジ34の先端部48がネジ孔32に確実に螺合したとき」とは、通ネジ34の先端部48がネジ孔32に2回転以上6回転以下の分だけ螺合したとき、である。
【0044】
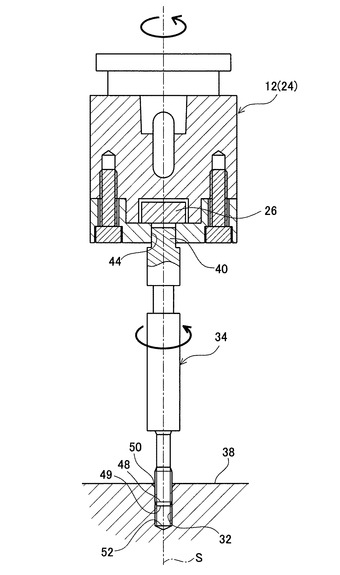
次に、図12に示すように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを有する状態でアダプタ12を回転させながら、アダプタ12をさらにネジ孔32の奥行き方向(下方向)に移動させる(図5に示す時間領域T14)。このとき、アダプタ12の回転速度を時間領域T12や時間領域T13のときよりも増加させて(図5に示す例では一例として288rpm)、通ネジ34の中心軸S方向の移動速度を増加させる。このように、隙間δを形成し終えたときに、通ネジ34の中心軸S方向の移動速度を増加させる。また、アダプタ12の中心軸S方向の移動速度を、時間領域T12のときよりも増加させる。
【0045】
ここで、図16〜図18に示すように、アダプタ12は嵌合部44を備えている。また、図19と図20に示すように、通ネジ34は中心軸方向の一端に端部40を備えている。そして、径方向(中心軸Sに直交する方向)について、アダプタ12の嵌合部44の外形と通ネジ34の端部40の外形はともに正方形に形成されており、アダプタ12の嵌合部44と通ネジ34の端部40とが嵌合している。そして、前記の時間領域T14では、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを設けた状態で、アダプタ12の嵌合部44と通ネジ34の端部40とを嵌合させている。これにより、アダプタ12から通ネジ34に対し通ネジ34を回転させる力は作用するが、アダプタ12の奥行き面46から通ネジ34の端面42に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、通ネジ34をネジ孔32の奥行き方向に移動させることができる。したがって、ネジ孔32のネジ山を保護しながら通ネジ34をネジ孔32に挿入させることができる。
【0046】
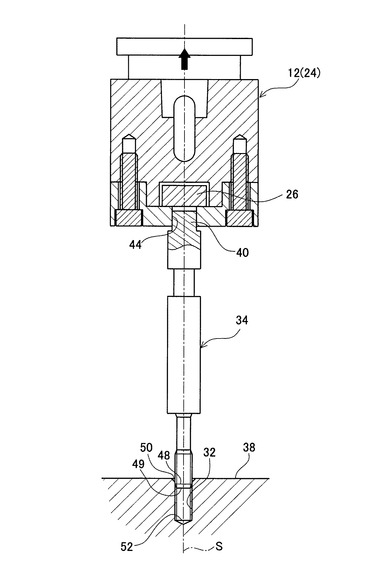
次に、図13に示すように、通ネジ34の先端部48がワーク30のネジ孔32のネジ底52に到達する(図5に示す時間領域T15)。すると、このとき、通ネジ34とネジ底52におけるネジ山が不完全な状態で形成された部分とが噛み合うので、アダプタ12の回転トルクが上昇して前記の回転軸電力が上昇する。そして、このとき制御部18は、アダプタ12の回転トルクが所定の閾値を超えると、すなわち、回転軸電力が所定の閾値を超えると、通ネジ34の先端部48がネジ底52に到達したものと判断して、アダプタ12の回転と移動を一旦停止させる。なお、アダプタ12の回転トルクにおける前記の所定の閾値は、一例として、定常値の1.3倍の値とすることが考えられる。ここで定常値とは、例えば、図5に示す時間領域T14のアダプタ12の回転トルクの値である。
【0047】
ここで、アダプタ12の回転を停止させたときに、惰性により通ネジ34がネジ孔32の奥行き方向にさらに押し込まれるおそれがある。しかし、前記のように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを設けているので、アダプタ12の奥行き面46から通ネジ34の端面42に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、通ネジ34によりネジ孔32のネジ底48が潰されるおそれはない。したがって、通ネジ34がネジ孔32から抜けなくなるおそれはない。
【0048】
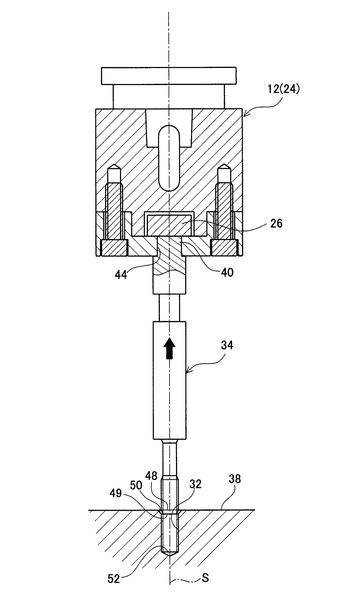
次に、図14に示すように、アダプタ12の回転方向を逆転させて通ネジ34の回転方向を逆転させる(逆回転させる)ことにより、通ネジ34をネジ孔32の口元方向に移動させて、通ネジ34の先端部48をネジ底52から離していく(図5に示す時間領域T16)。そしてその後、図15に示すように、通ネジ34をネジ孔32から抜いて開放させると、マグネット26の磁力によってアダプタ12と通ネジ34との間に吸引力が生じ、通ネジ34の端面42がアダプタ12の奥行き面46に吸着する(当接する)。なお、ネジ孔32の検査の前後に、通ネジ34の脱磁を実施しておく。以上のようにして、実施例1のネジ孔検査方法が行われる。
【0049】
以上のような実施例1によれば、通ネジ34がネジ孔32に螺合している状態で、通ネジ34と嵌合するアダプタ12の回転により通ネジ34を中心軸S方向に移動させるときに、当該中心軸S方向についてアダプタ12と通ネジ34との間に隙間δを有する。これにより、アダプタ12から通ネジ34に対し通ネジ34を回転させる力は作用するが、アダプタ12から通ネジ34に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、通ネジ34をネジ孔32の奥行き方向に移動させることができる。したがって、簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。また、ネジ孔検査装置1の構成を簡素化できるので、コストを抑制することができる。
【0050】
また、アダプタ12と通ネジ34との間の隙間δは、通ネジ34の先端部48が確実にネジ孔32に螺合したときに、通ネジ34の中心軸S方向についてアダプタ12を通ネジ34から離れる側に移動させることにより形成される。このように、隙間δは簡単な動作により形成される。したがって、より簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0051】
また、隙間δを形成し終えたときに通ネジ34の移動速度を増加させるので、その後のネジ孔32の検査を短時間で行うことができる。したがって、ネジ孔32の検査時間の短縮化を行うことができる。
【0052】
また、通ネジ34をネジ孔32の奥行き方向に移動させるときに、アダプタ12の回転トルクが所定の閾値を超えたときに通ネジ34の先端部48がネジ孔32のネジ底52に達したものと判断する。そして、アダプタ12の回転を一旦停止させた後に、アダプタ12の回転方向を逆転させて通ネジ34をネジ孔32の口元方向に移動させる。これにより、ネジ孔32のネジ底52を保護しつつネジ孔32の検査を行うことができる。
【0053】
また、通ネジ34をネジ孔32の口元方向に移動させてネジ孔32から開放させるときに、アダプタ12と通ネジ34との間に生じる磁力により通ネジ34の中心軸S方向についてアダプタ12と通ネジ34とを当接させる。これにより、ネジ孔32の検査を終了したときに、容易かつ確実に通ネジ34をアダプタ12にて回収することができる。そのため、ネジ孔32の検査の効率化を図ることができる。
【0054】
また、通ネジ34をネジ孔32の奥行き方向に移動させて先端部48がネジ底52に達するまでの時間を計測することにより、ネジ孔32の深さの測定もできる。
【0055】
<実施例2>
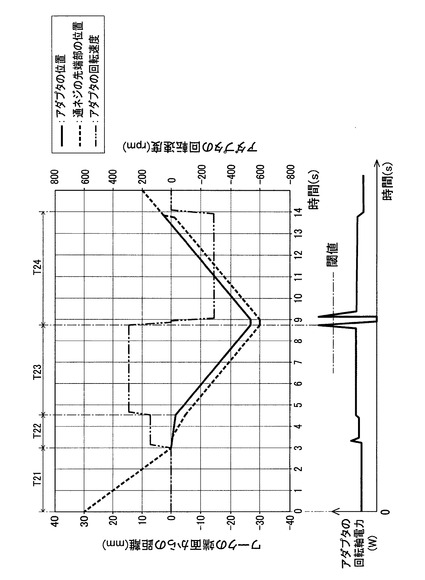
次に、実施例2について説明するが、実施例1と同等の構成要素については、同一の符号を付して説明を省略し、異なった点を中心に述べる。ここで、図21は、実施例2においてアダプタ12の位置と通ネジ34の先端部48(詳しくは、最先端部49)の位置とアダプタ12の回転速度についての時間変化と、回転軸電力についての時間変化とを示した図である。この図21は、横軸が時間(単位はs)を示し、縦軸がワーク30の端面38からの距離(単位はmm)とアダプタ12の回転速度(単位はrpm)と回転軸電力(単位はW)を示している。
【0056】
まず、実施例1と同様に、前記の図6に示すようにアダプタ12と通ネジ34をワーク30の端面38に向かって移動させて、前記の図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させる(図18の時間領域T21)。
【0057】
次に、アダプタ12と通ネジ34を低い回転速度(図21に示す例では一例として144rpm)で回転(正回転)させながら、アダプタ12を時間領域T21のときよりも低速でネジ孔32の奥行き方向(下方向)に移動させる(図18の時間領域T22)。より具体的には、アダプタ12の1回転あたりの中心軸S方向の移動量を、ネジ孔32のピッチよりも小さくする。すると、前記の図9に示すように通ネジ34の先端部48がネジ孔32に螺合し始めた後、アダプタ12の嵌合部44の奥行き面46と通ネジ34の端部40の端面42とが徐々に離れてその間に隙間が形成されていく。そして、やがて、前記の図10や図11に示すように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δが形成される。
【0058】
次に、隙間δを形成し終えた後、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを有する状態でアダプタ12を回転させながら、アダプタ12をさらにネジ孔32の奥行き方向に移動させる(図21に示す時間領域T23)。このとき、アダプタ12の回転速度を、前記の時間領域T22のときよりも増加させる。図21に示す例では、一例として、アダプタ12の回転速度を288rpmとする。さらに、隙間δを形成し終えたときに、アダプタ12の1回転あたりの中心軸S方向の移動量をネジ孔32のピッチと同じにして、通ネジ34の中心軸S方向の移動速度を増加させる。
【0059】
なお、これ以降の時間(図21の時間領域T24)は、実施例1(図5の時間領域T15と時間領域T16)と同様であるので、説明を省略する。以上のようにして、実施例2のネジ孔検査方法が行われる。
【0060】
以上のような実施例2によれば、前記の実施例1の効果に加えて、以下の効果を得ることができる。以上のように、実施例2によれば、アダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量がネジ孔32のピッチよりも小さい状態で、通ネジ34の先端部48をネジ孔32に螺合させて隙間δを形成する。このように、簡単な動作により、アダプタ12と通ネジ34との間の隙間δを形成する。したがって、より簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0061】
また、ワーク30の端面38の位置に通ネジ34の先端部48が達したときに、アダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量をネジ孔32のピッチよりも小さくする。これにより、その後、通ネジ34の先端部48がネジ孔32の位置に達して当該ネジ孔32に螺合するときに、ネジ孔32の位置に関わらず確実にアダプタ12と通ネジ34との間の隙間δを形成することができる。したがって、確実にネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0062】
また、隙間δを形成し終えたときにアダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量をネジ孔32のピッチと同じ大きさにして、通ネジ34の移動速度を増加させる。そのため、その後のネジ孔32の検査を短時間で行うことができる。したがって、ネジ孔32の検査時間の短縮化を行うことができる。
【0063】
<変形例>
上記の実施例においては、通ネジ34による検査を例に挙げて説明したが、変形例として、本発明は止ネジ36による検査にも適用させることができる。例えば、止ネジ36と嵌合するアダプタ12を回転させることにより止ネジ36をネジ孔32に螺合させて移動させるときに、止ネジ36の中心軸S方向についてアダプタ12と止ネジ36との間に隙間δを有しておく。
【0064】
そして、隙間δは、止ネジ36の先端部がネジ孔32に確実に螺合したときに、止ネジ36の中心軸S方向についてアダプタ12を止ネジ36から離れる側に移動させることにより形成される。あるいは、隙間δは、アダプタ12の1回転あたりの止ネジ36の中心軸S方向の移動量がネジ孔32のピッチよりも小さい状態で、止ネジ36の先端部をネジ孔32に螺合させて形成される。
【0065】
これにより、アダプタ12から止ネジ36に対し止ネジ36を回転させる力は作用するが、アダプタ12から止ネジ36に対し止ネジ36の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、ネジ孔32のネジ山の保護を図ることができる。したがって、簡易な手法でネジ孔32のネジ山の保護を図りつつ、止ネジ36を用いてネジ孔32の検査を行うことができる。
【0066】
なお、上記した実施の形態は単なる例示にすぎず、本発明を何ら限定するものではなく、その要旨を逸脱しない範囲内で種々の改良、変形が可能であることはもちろんである。上記の実施例ではアダプタ12をロボット10により駆動させているが、本発明はこれに限定されず、人間がアダプタ12を回転および移動させてネジゲージ14によりネジ孔32の検査を行う例においても適用することができる。また、上記の実施例では隙間δを形成した後は隙間δを一定にしてネジ孔32の検査を行っているが、隙間δを形成した後に隙間δの大きさが変化しながらネジ孔32の検査を行ってもよい。但し、隙間δの大きさは、アダプタ12のメスアダプタ24の嵌合部44の中心軸S方向の深さよりも小さくする。
【符号の説明】
【0067】
1 ネジ孔検査装置
10 ロボット
12 アダプタ
14 ネジゲージ
18 制御部
24 メスアダプタ
26 マグネット
30 ワーク
32 ネジ孔
34 通ネジ
38 (ワークの)端面
40 端部
42 (通ネジの)端面
44 嵌合部
46 奥行き面
48 先端部
52 ネジ底
δ 隙間
【技術分野】
【0001】
本発明は、ネジ孔におけるネジ山の精度の検査を行うネジ孔検査方法およびネジ孔検査装置に関するものである。
【背景技術】
【0002】
ネジゲージを用いた被検査物のネジ孔におけるネジ山の精度の検査において、ネジゲージとして例えば限界ネジゲージを用いた検査が行われている。そして、この限界ネジゲージを用いた検査においては、通ネジ(通りゲージ)を用いた検査と止ネジ(止まりゲージ)を用いた検査とが行われる。ここで、通ネジを用いた検査とは、ネジ孔(雌ネジ)の総合有効径が規定の許容限界内にあるか否かを検査するものであり、ネジ孔に通ネジが所定の深さまで螺合するか否か(ねじ作用で嵌め合わせることができるか否か)を検査するものである。また、止ネジを用いたネジ孔の検査とは、ネジ孔(雌ネジ)の実際の有効径が規定の最大寸法よりも小さいか否かを検査するものであり、ネジ孔に止ネジが所定の深さ(例えば、2回転分の深さ)を超えてねじ込まれなければ、ネジ孔は止ネジを用いた検査に合格したことになる。
【0003】
このようにネジゲージを用いて被検査物のネジ孔におけるネジ山の精度の検査として、特許文献1にはネジゲージを被検査物に螺合する際に推力を制御しながらネジ山を検査する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−164349号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここでネジゲージをネジ孔に螺合させる場合、ネジ孔のネジ山の保護の為にネジゲージの1回転当たりの送りピッチをネジ孔のピッチと正確に合わせる必要がある。しかしながら、特許文献1の技術では、移動用モータはネジゲージと軸方向に連結している(相対移動しない)ため、検査において推力を切り換えなければならないポイントが多くあり、制御手段はこのポイント毎に必要な速度やトルクの制御パラメータを高い精度で設定する必要がある。そのため、制御手法が複雑になるとともに、ネジ孔検査装置の構成が複雑になりコストが増大する。また、ネジ孔のピッチには寸法誤差が存在しうるが、この寸法誤差を考慮しながら推力を制御することは非常に難しいので、ネジ孔のネジ山を保護できないおそれがある。
【0006】
そこで、本発明は上記した問題点を解決するためになされたものであり、簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができるネジ孔検査方法およびネジ孔検査装置を提供すること、を課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するためになされた本発明の一態様は、ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、前記ネジゲージが前記ネジ孔に螺合している状態で、前記ネジゲージと嵌合するアダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有すること、を特徴とする。
【0008】
この態様によれば、ネジゲージがネジ孔に螺合している状態で、ネジゲージと嵌合するアダプタの回転によりネジゲージを当該ネジゲージの軸方向に移動させるときに、当該軸方向についてアダプタとネジゲージとの間に隙間を有する。これにより、アダプタからネジゲージに対しネジゲージを回転させる力は作用するが、アダプタからネジゲージに対しネジゲージの移動方向に押す、又は引っ張る力は作用しない。したがって、簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【0009】
上記の態様においては、前記隙間は、前記ネジゲージの先端部が前記ネジ孔に螺合したときに、前記軸方向について前記アダプタを前記ネジゲージから離れる側に移動させて形成されること、が好ましい。
【0010】
この態様によれば、アダプタとネジゲージとの間の隙間は、ネジゲージの先端部がネジ孔に螺合したときにネジゲージの軸方向についてアダプタをネジゲージから離れる側に移動させて形成される。このように、アダプタとネジゲージとの間の隙間は、簡単な動作により形成される。そのため、より簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【0011】
上記の態様においては、前記隙間を形成し終えたときに、前記ネジゲージの移動速度を増加させること、が好ましい。
【0012】
この態様によれば、隙間を形成し終えたときにネジゲージの移動速度を増加させるので、その後のネジ孔の検査を短時間で行うことができる。したがって、ネジ孔の検査時間の短縮化を行うことができる。
【0013】
上記の態様においては、前記ネジゲージを前記ネジ孔の奥行き方向に移動させるときに、前記アダプタの回転トルクが所定の閾値を超えたときに前記ネジゲージの先端部が前記ネジ孔のネジ底に達したものと判断して、前記アダプタの回転を一旦停止させた後に前記アダプタの回転方向を逆転させて前記ネジゲージを前記ネジ孔の口元方向に移動させること、が好ましい。
【0014】
この態様によれば、ネジゲージをネジ孔の奥行き方向に移動させるときに、アダプタの回転トルクが所定の閾値を超えたときにネジゲージの先端部がネジ孔のネジ底に達したものと判断する。そして、アダプタの回転を一旦停止させた後に、アダプタの回転方向を逆転させてネジゲージをネジ孔の口元方向に移動させる。これにより、ネジ孔のネジ底を保護しつつネジ孔の検査を行うことができる。
【0015】
上記の態様においては、前記ネジゲージを前記ネジ孔の奥行き方向に移動させた後に前記ネジ孔の口元方向に移動させて前記ネジ孔から開放させるときに、前記アダプタと前記ネジゲージとの間に生じる吸引力により前記軸方向について前記アダプタと前記ネジゲージとを当接させること、が好ましい。
【0016】
この態様によれば、ネジゲージをネジ孔の口元方向に移動させてネジ孔から開放させるときに、アダプタとネジゲージとの間に生じる吸引力によりネジゲージの軸方向についてアダプタとネジゲージとを当接させる。これにより、ネジ孔の検査を終了したときに、容易かつ確実にネジゲージをアダプタにて回収することができる。そのため、ネジ孔の検査の効率化を図ることができる。
【0017】
上記課題を解決するためになされた本発明の他の態様は、ネジゲージを用いてネジ孔を検査するネジ孔検査装置において、前記ネジゲージと嵌合するアダプタと、前記ネジゲージが前記ネジ孔に螺合している状態で、前記アダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有するように制御する制御部と、を有することを特徴とする。
【0018】
この態様によれば、制御部は、ネジゲージがネジ孔に螺合している状態で、アダプタの回転によりネジゲージを当該ネジゲージの軸方向に移動させるときに、当該軸方向についてアダプタとネジゲージとの間に隙間を有するように制御する。これにより、アダプタからネジゲージに対しネジゲージを回転させる力は作用するが、アダプタからネジゲージに対しネジゲージの移動方向に押す、又は引っ張る力は作用しない。したがって、簡易な手法でネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【発明の効果】
【0019】
本発明に係るネジ孔検査方法およびネジ孔検査装置によれば、簡易な手法によりネジ孔のネジ山の保護を図りつつネジ孔の検査を行うことができる。
【図面の簡単な説明】
【0020】
【図1】ネジ孔検査装置の概略構成図(上面図)である。
【図2】ネジ孔検査装置において、ロボットとアダプタとネジゲージとスタンドの概略構成図(斜視図)である。
【図3】回転軸とアダプタとネジゲージの分解図である。
【図4】ネジ孔検査装置の動作を示すフローチャート図である。
【図5】実施例1においてアダプタの位置と通ネジの先端部の位置とアダプタの回転速度についての時間変化、および各時間における回転軸を駆動させるための電力値を示した図である。
【図6】アダプタと通ネジをワークの端面に向かって移動させるときを示す図である。
【図7】図6におけるアダプタと通ネジの嵌合部分の周辺の拡大図である。
【図8】通ネジをワークの端面の位置まで移動させたときを示す図である。
【図9】通ネジがネジ孔の位置に達したときを示す図である。
【図10】通ネジがネジ孔に確実に螺合し、アダプタを上昇させてアダプタと通ネジとの間に隙間を形成したときを示す図である。
【図11】図10におけるアダプタと通ネジの嵌合部分の周辺の拡大図である。
【図12】アダプタと通ネジとの間に隙間を有する状態で通ネジをネジ孔の奥行き方向に移動させるときを示す図である。
【図13】通ネジがネジ孔のネジ底に到達したときを示す図である。
【図14】通ネジをネジ孔の口元方向に移動させるときを示す図である。
【図15】通ネジをネジ孔から抜いて開放させたときを示す図である。
【図16】アダプタの正面図である。
【図17】アダプタの下面図である。
【図18】図16のA−A断面図である。
【図19】ネジゲージの正面図である。
【図20】ネジゲージの上面図である。
【図21】実施例2においてアダプタの位置と通ネジの先端部の位置とアダプタの回転速度についての時間変化、および各時間における回転軸を駆動させるための電力値を示した図である。
【発明を実施するための形態】
【0021】
以下、本発明を具体化した実施例について、添付図面を参照しつつ詳細に説明する。
【0022】
〔ネジ孔検査装置の構成について〕
まず、ネジ孔検査装置1の構成について説明する。図1〜図3に示すように、ネジ孔検査装置1は、ロボット10と、アダプタ12と、ネジゲージ14と、スタンド16、制御部18と、搬送部20などから構成される。このネジ孔検査装置1は、詳しくは後述するように、ネジゲージ14を用いてワーク30のネジ孔32のネジ山の精度を検査するものである。
【0023】
ロボット10は、アダプタ12を駆動するための手段であり、図3に示すように中心軸Sを中心にアダプタ12を回転させる回転軸11を備えている。アダプタ12は、ネジゲージ14と嵌合している。そして、中心軸Sを中心にアダプタ12を回転させることにより、中心軸Sを中心にネジゲージ14を回転させることができる。そのため、アダプタ12を回転させることにより、ネジゲージ14をワーク30のネジ孔32に螺合させて(ねじ作用で嵌め合わせて)移動させることができる。なお、中心軸Sは、アダプタ12とネジゲージ14の中心軸である。
【0024】
また、アダプタ12は、オスアダプタ22とメスアダプタ24とを備えている。そして、例えばメスアダプタ24に備わるモールステーパが形成されたテーパ孔部とオスアダプタ22に備わるテーパシャンク部と嵌め合わすことにより、オスアダプタ22とメスアダプタ24とを一体にすることができる。なお、メスアダプタ24は、マグネット26を備えている。
【0025】
ネジゲージ14は、搬送部20により搬送されるパレット28に載せられたワーク30のネジ孔32のネジ山の精度を検査するための治具であり、例えば、通ネジ34(通りゲージ)や止ネジ36(止まりゲージ)などである。
【0026】
スタンド16は、複数のネジゲージ14を保管しておくための台である。制御部18は、ネジ孔検査装置1の動作を制御する手段であり、後述するネジ孔検査方法においてネジ孔の検査における動作を制御する。
【0027】
〔ネジ孔検査装置の動作について〕
以上のような構成のネジ孔検査装置1は、ワーク30のネジ孔32を検査するとき、図4のフローチャート図で示されるような動作を行う。まず、ロボット10を起動し(ステップS1)、メスアダプタ24を保管する不図示のスタンドから所望のメスアダプタ24を取り出して、当該メスアダプタ24をロボット10の回転軸11に接続するオスアダプタ22に嵌合させて取り付ける(ステップS2)。
【0028】
次に、検査対象となるネジ孔32に適合した所望の通ネジ34をスタンド16から選択して取り出す(ステップS3)。次に、通ネジ34を用いてネジ孔32の検査を行うネジ孔検査方法について規定した通ネジ用のネジ孔挿入プログラムを実行し(ステップS4)、通ネジ34を用いてネジ孔32のネジ山の精度の検査を行う。なお、本発明における通ネジ34を用いてネジ孔32の検査を行うネジ孔検査方法の詳細については後述する。
【0029】
次に、通ネジ34を用いたネジ孔32の検査結果の良否を判断する(ステップS5)。そして、通ネジ34を用いたネジ孔32の検査結果が良好な場合(すなわち、ネジ孔32に通ネジ34が所定の深さまで螺合して、ネジ孔32の総合有効径が規定された許容限界内にあるとの検査結果が得られた場合)には、通ネジ34をスタンド16におけるもとの位置に戻す(ステップS6)。
【0030】
このようにステップS6において通ネジ34をスタンド16におけるもとの位置に戻した後、検査対象となるネジ孔32に適合した所望の止ネジ36をスタンド16から選択して取り出す(ステップS7)。次に、止ネジ36を用いてネジ孔32の検査を行うネジ孔検査方法について規定した止ネジ用のネジ孔挿入プログラムを実行し(ステップS8)、止ネジ36を用いてネジ孔32のネジ山の精度の検査を行う。
【0031】
次に、止ネジ36を用いたネジ孔32の検査結果の良否を判断する(ステップS9)。そして、止ネジ36を用いたネジ孔32の検査結果が良好な場合(すなわち、ネジ孔32に止ネジ36が所定の深さ(例えば、止ネジ36が2回転したときの深さ)を超えてねじ込まれなかったことから、合格との検査結果が得られた場合)には、止ネジ36をスタンド16におけるもとの位置に戻す(ステップS10)。
【0032】
次に、ワーク30における他のネジ孔の検査を行うか否かを判断する(ステップS11)。そして、ワーク30における他の孔径のネジ孔の検査を行う場合にはステップS3に戻る。一方、ワーク30における他の孔径のネジ孔の検査を行わない場合には、オスアダプタ22からメスアダプタ24を取り外して、このメスアダプタ24をアダプタ用のスタンド(不図示)のもとの位置に戻す(ステップS12)。そして、ロボット10を停止する(ステップS13)。
【0033】
なお、ステップS5において通ネジ34を用いたネジ孔32の検査結果の良否を判断した結果、通ネジ34を用いたネジ孔32の検査結果が良くない場合には、ネジ孔検査装置1は待機状態になる(ステップS14)。また、ステップS9において止ネジ36を用いたネジ孔32の検査結果の良否を判断した結果、止ネジ36を用いたネジ孔32の検査結果が良くない場合には、ネジ孔検査装置1は待機状態になる(ステップS14)。このように、ネジ孔検査装置1は、ワーク30のネジ孔32を検査するに際して以上のような動作を行う。
【0034】
〔ネジ孔検査方法について〕
次に、前記のようにネジ孔挿入プログラムにおいて規定されているネジゲージ14を用いてネジ孔32の精度の検査を行うネジ孔検査方法の詳細について説明する。ここでは、主にネジゲージ14として通ネジ34を例に挙げ、通ネジ34を用いてネジ孔32の精度の検査を行うネジ孔検査方法について説明する。なお、本発明のネジ孔検査方法における各部品の動作は、前記のネジ孔検査装置1の制御部18により制御される。
【0035】
<実施例1>
まず、実施例1について説明する。ここで、図5は、実施例1においてアダプタ12の位置と通ネジ34の先端部48(詳しくは、最先端部49)(図6参照)の位置とアダプタ12の回転速度についての時間変化、および各時間における回転軸11を駆動させるための電力値を示した図である。この図5は、横軸が時間(単位はs)を示し、縦軸がワーク30の端面38(図6参照)からの距離(単位はmm)やアダプタ12の回転速度(単位はrpm)や回転軸11を駆動させるための電力値(単位はW)を示している。なお、ここでは、一例として、ネジ孔32について、ネジの呼び径を8mm、ピッチを1.25mm、深さを30mmとする。
【0036】
なお、図5において、アダプタ12の位置は通ネジ34の先端部48(詳しくは、最先端部49)の位置を基準の位置として示しており、詳細には、ワーク30の端面38からアダプタ12までの距離を、ワーク30の端面38からアダプタ12の奥行き面46(図7参照)までの実際の距離から通ネジ34の中心軸S方向の長さを引いた距離として示している。そのため、図5において、アダプタ12の奥行き面46と通ネジ34の端面42(図7参照)とが当接しているときはアダプタ12の位置と通ネジ34の位置とが重なって示され、アダプタ12の奥行き面46と通ネジ34の端面42とが離間して隙間を生じているときはアダプタ12の位置と通ネジ34の位置とが前記の隙間の大きさだけずれて示されることになる。
【0037】
また、図6〜図15は、アダプタ12と通ネジ34とワーク30(ネジ孔32)との位置関係を示した図である。なお、図6〜図15において、説明の便宜上、アダプタ12のうちメスアダプタ24のみを示しており、オスアダプタ22を省略している。
【0038】
まず、図6に示すように、アダプタ12と通ネジ34をワーク30の端面38に向かって移動させる(図5に示す時間領域T11)。図5に示す例では、時間=0s〜3sにおいて、通ネジ34の先端部48をワーク30の端面38からの距離が30mmとなる位置から0mmとなる位置まで移動させる。このとき、アダプタ12を回転させていない。また、このとき、図7に示すように、マグネット26の磁力によって通ネジ34の端部40の端面42をアダプタ12の嵌合部44の奥行き面46(本実施例では、マグネット26の一部の面)に吸着させて、中心軸S方向について通ネジ34の端面42とアダプタ12の奥行き面46とを当接させた状態としている。
【0039】
次に、図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させた後、さらにアダプタ12と通ネジ34をネジ孔32に向かって移動させ、図9に示すように通ネジ34の先端部48がネジ孔32に螺合し始める(図5に示す時間領域T12)。図5に示す例では、時間=3s〜4sにおいて、通ネジ34の先端部48をワーク30の端面38からの距離が0mmとなる位置から−3mmとなる位置まで移動させる。このとき、アダプタ12を低い回転速度(図5に示す例では一例として144rpm)で回転(正回転)させ、アダプタ12の中心軸S方向の移動速度を時間領域T11のときよりも減少させている。また、このとき、前記の時間領域T11と同様に、図7に示すように通ネジ34の端面42とアダプタ12の奥行き面46とを当接させた状態にしている。
【0040】
なお、ワーク30のネジ孔32の口元部分には面取り部50が設けられているので、図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させた時には、通ネジ34の先端部48は未だネジ孔32に螺合していない。そして、その後、通ネジ34の先端部48が面取り部50を通過してネジ孔32に達した時に、図9に示すように通ネジ34の先端部48はネジ孔32に螺合し始める。
【0041】
また、このとき、通ネジ34の先端部48がネジ孔32に螺合し始めたときに、アダプタ12の回転トルクが上昇する。これにより、図5に示すように、アダプタ12を回転させる回転軸11を駆動させるための電力(以下、回転軸電力という)の時間波形に、アダプタ12の回転トルクが上昇した影響が表れる。
【0042】
次に、通ネジ34の先端部48がネジ孔32に確実に螺合したとき(図5に示す例においては時間が4sのとき)に、アダプタ12を上昇させる。すなわち、中心軸S方向についてアダプタ12を通ネジ34から離れる側に移動させる。これにより、図10と図11に示すように、中心軸S方向についてアダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δが形成される(図5に示す時間領域T13)。なお、隙間δは、アダプタ12のメスアダプタ24の嵌合部44の中心軸S方向の深さよりも小さくする。また、図10に示すようにネジ孔32の中心軸は中心軸Sと一致している。
【0043】
ここで、「通ネジ34の先端部48がネジ孔32に確実に螺合したとき」とは、通ネジ34の先端部48とネジ孔32との間に発生する締結力がマグネット26の磁力により生じるアダプタ12の奥行き面46と通ネジ34の端面42との吸着力よりも大きくなったとき、である。より具体的には、「通ネジ34の先端部48がネジ孔32に確実に螺合したとき」とは、通ネジ34の先端部48がネジ孔32に2回転以上6回転以下の分だけ螺合したとき、である。
【0044】
次に、図12に示すように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを有する状態でアダプタ12を回転させながら、アダプタ12をさらにネジ孔32の奥行き方向(下方向)に移動させる(図5に示す時間領域T14)。このとき、アダプタ12の回転速度を時間領域T12や時間領域T13のときよりも増加させて(図5に示す例では一例として288rpm)、通ネジ34の中心軸S方向の移動速度を増加させる。このように、隙間δを形成し終えたときに、通ネジ34の中心軸S方向の移動速度を増加させる。また、アダプタ12の中心軸S方向の移動速度を、時間領域T12のときよりも増加させる。
【0045】
ここで、図16〜図18に示すように、アダプタ12は嵌合部44を備えている。また、図19と図20に示すように、通ネジ34は中心軸方向の一端に端部40を備えている。そして、径方向(中心軸Sに直交する方向)について、アダプタ12の嵌合部44の外形と通ネジ34の端部40の外形はともに正方形に形成されており、アダプタ12の嵌合部44と通ネジ34の端部40とが嵌合している。そして、前記の時間領域T14では、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを設けた状態で、アダプタ12の嵌合部44と通ネジ34の端部40とを嵌合させている。これにより、アダプタ12から通ネジ34に対し通ネジ34を回転させる力は作用するが、アダプタ12の奥行き面46から通ネジ34の端面42に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、通ネジ34をネジ孔32の奥行き方向に移動させることができる。したがって、ネジ孔32のネジ山を保護しながら通ネジ34をネジ孔32に挿入させることができる。
【0046】
次に、図13に示すように、通ネジ34の先端部48がワーク30のネジ孔32のネジ底52に到達する(図5に示す時間領域T15)。すると、このとき、通ネジ34とネジ底52におけるネジ山が不完全な状態で形成された部分とが噛み合うので、アダプタ12の回転トルクが上昇して前記の回転軸電力が上昇する。そして、このとき制御部18は、アダプタ12の回転トルクが所定の閾値を超えると、すなわち、回転軸電力が所定の閾値を超えると、通ネジ34の先端部48がネジ底52に到達したものと判断して、アダプタ12の回転と移動を一旦停止させる。なお、アダプタ12の回転トルクにおける前記の所定の閾値は、一例として、定常値の1.3倍の値とすることが考えられる。ここで定常値とは、例えば、図5に示す時間領域T14のアダプタ12の回転トルクの値である。
【0047】
ここで、アダプタ12の回転を停止させたときに、惰性により通ネジ34がネジ孔32の奥行き方向にさらに押し込まれるおそれがある。しかし、前記のように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを設けているので、アダプタ12の奥行き面46から通ネジ34の端面42に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、通ネジ34によりネジ孔32のネジ底48が潰されるおそれはない。したがって、通ネジ34がネジ孔32から抜けなくなるおそれはない。
【0048】
次に、図14に示すように、アダプタ12の回転方向を逆転させて通ネジ34の回転方向を逆転させる(逆回転させる)ことにより、通ネジ34をネジ孔32の口元方向に移動させて、通ネジ34の先端部48をネジ底52から離していく(図5に示す時間領域T16)。そしてその後、図15に示すように、通ネジ34をネジ孔32から抜いて開放させると、マグネット26の磁力によってアダプタ12と通ネジ34との間に吸引力が生じ、通ネジ34の端面42がアダプタ12の奥行き面46に吸着する(当接する)。なお、ネジ孔32の検査の前後に、通ネジ34の脱磁を実施しておく。以上のようにして、実施例1のネジ孔検査方法が行われる。
【0049】
以上のような実施例1によれば、通ネジ34がネジ孔32に螺合している状態で、通ネジ34と嵌合するアダプタ12の回転により通ネジ34を中心軸S方向に移動させるときに、当該中心軸S方向についてアダプタ12と通ネジ34との間に隙間δを有する。これにより、アダプタ12から通ネジ34に対し通ネジ34を回転させる力は作用するが、アダプタ12から通ネジ34に対し通ネジ34の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、通ネジ34をネジ孔32の奥行き方向に移動させることができる。したがって、簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。また、ネジ孔検査装置1の構成を簡素化できるので、コストを抑制することができる。
【0050】
また、アダプタ12と通ネジ34との間の隙間δは、通ネジ34の先端部48が確実にネジ孔32に螺合したときに、通ネジ34の中心軸S方向についてアダプタ12を通ネジ34から離れる側に移動させることにより形成される。このように、隙間δは簡単な動作により形成される。したがって、より簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0051】
また、隙間δを形成し終えたときに通ネジ34の移動速度を増加させるので、その後のネジ孔32の検査を短時間で行うことができる。したがって、ネジ孔32の検査時間の短縮化を行うことができる。
【0052】
また、通ネジ34をネジ孔32の奥行き方向に移動させるときに、アダプタ12の回転トルクが所定の閾値を超えたときに通ネジ34の先端部48がネジ孔32のネジ底52に達したものと判断する。そして、アダプタ12の回転を一旦停止させた後に、アダプタ12の回転方向を逆転させて通ネジ34をネジ孔32の口元方向に移動させる。これにより、ネジ孔32のネジ底52を保護しつつネジ孔32の検査を行うことができる。
【0053】
また、通ネジ34をネジ孔32の口元方向に移動させてネジ孔32から開放させるときに、アダプタ12と通ネジ34との間に生じる磁力により通ネジ34の中心軸S方向についてアダプタ12と通ネジ34とを当接させる。これにより、ネジ孔32の検査を終了したときに、容易かつ確実に通ネジ34をアダプタ12にて回収することができる。そのため、ネジ孔32の検査の効率化を図ることができる。
【0054】
また、通ネジ34をネジ孔32の奥行き方向に移動させて先端部48がネジ底52に達するまでの時間を計測することにより、ネジ孔32の深さの測定もできる。
【0055】
<実施例2>
次に、実施例2について説明するが、実施例1と同等の構成要素については、同一の符号を付して説明を省略し、異なった点を中心に述べる。ここで、図21は、実施例2においてアダプタ12の位置と通ネジ34の先端部48(詳しくは、最先端部49)の位置とアダプタ12の回転速度についての時間変化と、回転軸電力についての時間変化とを示した図である。この図21は、横軸が時間(単位はs)を示し、縦軸がワーク30の端面38からの距離(単位はmm)とアダプタ12の回転速度(単位はrpm)と回転軸電力(単位はW)を示している。
【0056】
まず、実施例1と同様に、前記の図6に示すようにアダプタ12と通ネジ34をワーク30の端面38に向かって移動させて、前記の図8に示すように通ネジ34の先端部48をワーク30の端面38の位置まで移動させる(図18の時間領域T21)。
【0057】
次に、アダプタ12と通ネジ34を低い回転速度(図21に示す例では一例として144rpm)で回転(正回転)させながら、アダプタ12を時間領域T21のときよりも低速でネジ孔32の奥行き方向(下方向)に移動させる(図18の時間領域T22)。より具体的には、アダプタ12の1回転あたりの中心軸S方向の移動量を、ネジ孔32のピッチよりも小さくする。すると、前記の図9に示すように通ネジ34の先端部48がネジ孔32に螺合し始めた後、アダプタ12の嵌合部44の奥行き面46と通ネジ34の端部40の端面42とが徐々に離れてその間に隙間が形成されていく。そして、やがて、前記の図10や図11に示すように、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δが形成される。
【0058】
次に、隙間δを形成し終えた後、アダプタ12の奥行き面46と通ネジ34の端面42との間に隙間δを有する状態でアダプタ12を回転させながら、アダプタ12をさらにネジ孔32の奥行き方向に移動させる(図21に示す時間領域T23)。このとき、アダプタ12の回転速度を、前記の時間領域T22のときよりも増加させる。図21に示す例では、一例として、アダプタ12の回転速度を288rpmとする。さらに、隙間δを形成し終えたときに、アダプタ12の1回転あたりの中心軸S方向の移動量をネジ孔32のピッチと同じにして、通ネジ34の中心軸S方向の移動速度を増加させる。
【0059】
なお、これ以降の時間(図21の時間領域T24)は、実施例1(図5の時間領域T15と時間領域T16)と同様であるので、説明を省略する。以上のようにして、実施例2のネジ孔検査方法が行われる。
【0060】
以上のような実施例2によれば、前記の実施例1の効果に加えて、以下の効果を得ることができる。以上のように、実施例2によれば、アダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量がネジ孔32のピッチよりも小さい状態で、通ネジ34の先端部48をネジ孔32に螺合させて隙間δを形成する。このように、簡単な動作により、アダプタ12と通ネジ34との間の隙間δを形成する。したがって、より簡易な手法でネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0061】
また、ワーク30の端面38の位置に通ネジ34の先端部48が達したときに、アダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量をネジ孔32のピッチよりも小さくする。これにより、その後、通ネジ34の先端部48がネジ孔32の位置に達して当該ネジ孔32に螺合するときに、ネジ孔32の位置に関わらず確実にアダプタ12と通ネジ34との間の隙間δを形成することができる。したがって、確実にネジ孔32のネジ山の保護を図りつつネジ孔32の検査を行うことができる。
【0062】
また、隙間δを形成し終えたときにアダプタ12の1回転あたりの通ネジ34の中心軸S方向の移動量をネジ孔32のピッチと同じ大きさにして、通ネジ34の移動速度を増加させる。そのため、その後のネジ孔32の検査を短時間で行うことができる。したがって、ネジ孔32の検査時間の短縮化を行うことができる。
【0063】
<変形例>
上記の実施例においては、通ネジ34による検査を例に挙げて説明したが、変形例として、本発明は止ネジ36による検査にも適用させることができる。例えば、止ネジ36と嵌合するアダプタ12を回転させることにより止ネジ36をネジ孔32に螺合させて移動させるときに、止ネジ36の中心軸S方向についてアダプタ12と止ネジ36との間に隙間δを有しておく。
【0064】
そして、隙間δは、止ネジ36の先端部がネジ孔32に確実に螺合したときに、止ネジ36の中心軸S方向についてアダプタ12を止ネジ36から離れる側に移動させることにより形成される。あるいは、隙間δは、アダプタ12の1回転あたりの止ネジ36の中心軸S方向の移動量がネジ孔32のピッチよりも小さい状態で、止ネジ36の先端部をネジ孔32に螺合させて形成される。
【0065】
これにより、アダプタ12から止ネジ36に対し止ネジ36を回転させる力は作用するが、アダプタ12から止ネジ36に対し止ネジ36の移動方向に押す、又は引っ張る力は作用しない。そのため、ネジ孔32のネジのピッチの寸法誤差を許容しながら、ネジ孔32のネジ山の保護を図ることができる。したがって、簡易な手法でネジ孔32のネジ山の保護を図りつつ、止ネジ36を用いてネジ孔32の検査を行うことができる。
【0066】
なお、上記した実施の形態は単なる例示にすぎず、本発明を何ら限定するものではなく、その要旨を逸脱しない範囲内で種々の改良、変形が可能であることはもちろんである。上記の実施例ではアダプタ12をロボット10により駆動させているが、本発明はこれに限定されず、人間がアダプタ12を回転および移動させてネジゲージ14によりネジ孔32の検査を行う例においても適用することができる。また、上記の実施例では隙間δを形成した後は隙間δを一定にしてネジ孔32の検査を行っているが、隙間δを形成した後に隙間δの大きさが変化しながらネジ孔32の検査を行ってもよい。但し、隙間δの大きさは、アダプタ12のメスアダプタ24の嵌合部44の中心軸S方向の深さよりも小さくする。
【符号の説明】
【0067】
1 ネジ孔検査装置
10 ロボット
12 アダプタ
14 ネジゲージ
18 制御部
24 メスアダプタ
26 マグネット
30 ワーク
32 ネジ孔
34 通ネジ
38 (ワークの)端面
40 端部
42 (通ネジの)端面
44 嵌合部
46 奥行き面
48 先端部
52 ネジ底
δ 隙間
【特許請求の範囲】
【請求項1】
ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、
前記ネジゲージが前記ネジ孔に螺合している状態で、前記ネジゲージと嵌合するアダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、
前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有すること、
を特徴とするネジ孔検査方法。
【請求項2】
請求項1のネジ孔検査方法において、
前記隙間は、前記ネジゲージの先端部が前記ネジ孔に螺合したときに、前記軸方向について前記アダプタを前記ネジゲージから離れる側に移動させて形成されること、
を特徴とするネジ孔検査方法。
【請求項3】
請求項2のネジ孔検査方法において、
前記隙間を形成し終えたときに、前記ネジゲージの移動速度を増加させること、
を特徴とするネジ孔検査方法。
【請求項4】
請求項1乃至3のいずれか1つのネジ孔検査方法において、
前記ネジゲージを前記ネジ孔の奥行き方向に移動させるときに、前記アダプタの回転トルクが所定の閾値を超えたときに前記ネジゲージの先端部が前記ネジ孔のネジ底に達したものと判断して、前記アダプタの回転を一旦停止させた後に前記アダプタの回転方向を逆転させて前記ネジゲージを前記ネジ孔の口元方向に移動させること、
を特徴とするネジ孔検査方法。
【請求項5】
請求項1乃至4のいずれか1つのネジ孔検査方法において、
前記ネジゲージを前記ネジ孔の奥行き方向に移動させた後に前記ネジ孔の口元方向に移動させて前記ネジ孔から開放させるときに、前記アダプタと前記ネジゲージとの間に生じる吸引力により前記軸方向について前記アダプタと前記ネジゲージとを当接させること、
を特徴とするネジ孔検査方法。
【請求項6】
ネジゲージを用いてネジ孔を検査するネジ孔検査装置において、
前記ネジゲージと嵌合するアダプタと、
前記ネジゲージが前記ネジ孔に螺合している状態で、前記アダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有するように制御する制御部と、
を有することを特徴とするネジ孔検査装置。
【請求項1】
ネジゲージを用いてネジ孔を検査するネジ孔検査方法において、
前記ネジゲージが前記ネジ孔に螺合している状態で、前記ネジゲージと嵌合するアダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、
前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有すること、
を特徴とするネジ孔検査方法。
【請求項2】
請求項1のネジ孔検査方法において、
前記隙間は、前記ネジゲージの先端部が前記ネジ孔に螺合したときに、前記軸方向について前記アダプタを前記ネジゲージから離れる側に移動させて形成されること、
を特徴とするネジ孔検査方法。
【請求項3】
請求項2のネジ孔検査方法において、
前記隙間を形成し終えたときに、前記ネジゲージの移動速度を増加させること、
を特徴とするネジ孔検査方法。
【請求項4】
請求項1乃至3のいずれか1つのネジ孔検査方法において、
前記ネジゲージを前記ネジ孔の奥行き方向に移動させるときに、前記アダプタの回転トルクが所定の閾値を超えたときに前記ネジゲージの先端部が前記ネジ孔のネジ底に達したものと判断して、前記アダプタの回転を一旦停止させた後に前記アダプタの回転方向を逆転させて前記ネジゲージを前記ネジ孔の口元方向に移動させること、
を特徴とするネジ孔検査方法。
【請求項5】
請求項1乃至4のいずれか1つのネジ孔検査方法において、
前記ネジゲージを前記ネジ孔の奥行き方向に移動させた後に前記ネジ孔の口元方向に移動させて前記ネジ孔から開放させるときに、前記アダプタと前記ネジゲージとの間に生じる吸引力により前記軸方向について前記アダプタと前記ネジゲージとを当接させること、
を特徴とするネジ孔検査方法。
【請求項6】
ネジゲージを用いてネジ孔を検査するネジ孔検査装置において、
前記ネジゲージと嵌合するアダプタと、
前記ネジゲージが前記ネジ孔に螺合している状態で、前記アダプタの回転により前記ネジゲージを当該ネジゲージの軸方向に移動させるときに、前記軸方向について前記アダプタと前記ネジゲージとの間に隙間を有するように制御する制御部と、
を有することを特徴とするネジ孔検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2013−72699(P2013−72699A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210998(P2011−210998)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]