
ネジ締付け診断装置及び電動ドライバ
【課題】不完全なネジの締付け状態を簡単、確実に検出して確実なネジ締付け作業を行わしめるネジ締付け診断装置を提供する。
【解決手段】電動ドライバの回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内に予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に電動ドライバでネジを押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、この回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出すると共に、押圧力検出手段が予め設定された押圧力を検出した場合にはネジ締付けが正常に行われたと診断するネジ締付け診断手段とを備える。
【解決手段】電動ドライバの回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内に予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に電動ドライバでネジを押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、この回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出すると共に、押圧力検出手段が予め設定された押圧力を検出した場合にはネジ締付けが正常に行われたと診断するネジ締付け診断手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動ドライバによるネジ締付け作業を診断するネジ締付け診断装置及びこの装置を用いた電動ドライバに関するものである。
【背景技術】
【0002】
ネジ締付けなどを効率的に行うための電動ドライバが種々提案されている。この種の電動ドライバでは、ネジを締付けるドライバビットを装着するドライバチャックと電動機との間に機械式若しくは電磁式のクラッチ機構を設け、ネジ締めしてネジ座面が着座しネジ締付けトルクが設定値以上になると電動機の駆動を停止、或いは、電動機の駆動を断続させることでより精密な締付けを可能としたものが提案されている(例えば特許文献1、2)。
【0003】
しかし、この種の電動ドライバではネジを締付け設定値以上の締付けトルクになることでドライバビットの回転が停止してネジ締付けが完了するが、あくまで作業者が電動ドライバを手で持って、ドライバビットをネジに押圧した状態でネジを締付けるものであるため、作業者によって、また、同じ作業者でも、ドライバビットの形状の相違や締付け方向や押圧する力の大きさや、また更にネジ締付け終了するタイミングなどによってネジ締付け状態が大きく異なり、ネジの締付けの不足や過大、更に所謂、ネジのドン突き、カジリ、頭ナメなどの不具合が発生することがあり、また、このようなネジ締付け不良状態は装置類を組立てた後からでは、一見して分からないことがあり、しばしば見逃されることもあった。
【0004】
本発明者は、このような製造現場におけるネジ締付け不良を低減するために、ネジ締付け不良現象を分析した結果、ネジ締付けトルク、即ち、電動ドライバの回転軸に生ずる回転トルクの大小だけでなく、締付け時間を制御し、管理することでネジ締付け不良の大半を改善できることを見出し、ネジ締付け作業を行った時点で、直ちにその作業の良否判定を行うことで、効率的なネジ締付け作業を可能にすると共に、確実なネジ締付け作業を図れる電動ドライバのネジ締付け忘れ防止装置を提案した(特許文献3)。
【0005】
この電動ドライバのネジ締付け忘れ防止装置は、ネジ長に応じて締付け最小所要時間を設定し、この最小所要時間以降の所定時間範囲のネジ締付け完了判定期間に電動ドライバの回転軸に生ずる回転トルクが予め設定された回転トルクに達して、ネジ締めが完了できるか否かによりネジ締付けの状態を診断するもので、この診断によりネジ締付け不良を検出し、更にこのような不良と判定されないネジ締付け作業数を計数して予定作業本数と照合することで、ネジ締付け作業状態を管理、評価し、ネジ締付け不良の改善や締め忘れの防止を図るものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3663638号公報
【特許文献2】特開2005−238418号公報
【特許文献3】特許第4295063号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このネジ締付け忘れ防止装置を以ってしても、あくまで作業者が電動ドライバを手で持って、ドライバビットをネジに押圧した状態でネジ締付けするものであるため、作業者によって、また、同じ作業者でも、また用いるドライバビットの形状の相違によっても押圧する力の大きさが異なり、更に、ネジ締付け時、作業者は繰り返し行うネジ締付作業になれることで、締付け完了寸前に反射的に若しくは無意識に電動ドライバをネジから浮かしがちとなってネジの締付けが完全になされず、しばしばネジの微妙な浮きなどを起こしてネジの締付けの不足となることがあった。このような不完全な締付けがなされたネジは経時的に緩んで種々の問題を引き起こす原因となることがある。
【0008】
本発明は、このような、不完全なネジの締付け状態を簡単、確実に検出して確実なネジ締付け作業を行わしめるネジ締付け診断装置を提供し、製造される各種装置の信頼性及び安全性を高めることに寄与し得ることを目的とする。
【課題を解決するための手段】
【0009】
添付図面を参照して本発明の要旨を説明する。
【0010】
電動ドライバ1を用いてネジ2の締付けを行った際のネジ締付け状態の診断を行うネジ締付け診断装置であって、前記電動ドライバ1の回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に前記電動ドライバ1で前記ネジ2を押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段5とを備えたことを特徴とするネジ締付け診断装置に係るものである。
【0011】
また、前記ネジ締付け診断手段5は、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出した際、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成したことを特徴とする請求項1記載のネジ締付け診断装置に係るものである。
【0012】
また、前記押圧力検出手段は、前記電動ドライバ1で前記ネジ2を押圧することで生ずる前記押圧力を検知する押圧力センサ部22と、この押圧力センサ部22で検知した前記押圧力が予め設定された押圧力に達したことを検出する押圧力識別部4とからなることを特徴とする請求項1,2のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0013】
また、前記電動ドライバ1を備え、この電動ドライバ1に前記押圧力センサ部22を設けたことを特徴とする請求項3記載のネジ締付け診断装置に係るものである。
【0014】
また、前記回転トルク検出手段は、前記電動ドライバ1で前記ネジ2を回動することで生ずる前記回転トルクを検知する回転トルクセンサ部21でなり、前記電動ドライバ1を備え、この電動ドライバ1に前記回転トルクセンサ部21を設けたことを特徴とする請求項1〜4のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0015】
また、前記回転トルク検出手段に予め設定される前記ネジ締付け最小所要時間,前記所要時間範囲,前記回転トルク、並びに、前記押圧力検出手段に予め設定される前記押圧力を設定する設定部48と、前記ネジ締付け診断手段5で診断されたネジ締付け診断結果を報知する報知部6とを備えたことを特徴とする請求項1〜5のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0016】
また、請求項1〜6のいずれか1項に記載のネジ締付け診断装置を具備したことを特徴とする電動ドライバに係るものである。
【0017】
また、前記電動ドライバ1の電動機14を駆動する駆動電流及びこの電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した前記駆動電流と前記駆動回転数とから前記電動機14の駆動トルクを算出すると共に、前記回転トルク検出手段に備えた回転トルクセンサ部21で前記電動ドライバ1の回転軸の回転トルクを検知し、前記算出した駆動トルクと、前記回転トルクセンサ部21で検知した回転トルクとを比較して前記電動ドライバ1の駆動力の劣化を診断する駆動力劣化診断手段8を備えたことを特徴とする請求項7記載の電動ドライバに係るものである。
【0018】
また、前記電動ドライバ1に、この電動ドライバ1の回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると前記電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に、前記遮断回転トルクを可変設定する遮断トルク調整機構37を設け、この遮断トルク調整機構37の遮断回転トルクを遠隔操作により設定し得る設定部48を備えたことを特徴とする請求項7,8のいずれか1項に記載の電動ドライバに係るものである。
【発明の効果】
【0019】
本発明は上述のように構成したから、電動ドライバの回転軸に生ずる回転トルクと、電動ドライバでネジを押圧することで生ずる押圧力とから正しくネジの締付けが行われたことを検出できることになり、その結果、ネジ締付け完了時にも確実にネジを押圧させるようにネジ締付け作業を強制し得ることになって、不完全なネジ締付け状態を可及的に低減して確実なネジ締付け作業を行わしめるネジ締付け診断装置になると共に、このネジ締付け診断装置を採用した電動ドライバを用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0020】
また、請求項2記載の発明においては、予め設定された回転トルクが発生した際に予め設定された押圧力が維持されていることを検出することで正常なネジ締付けが行われたと診断されることになり、より一層確実なネジ締付け診断を行えるネジ締付け診断装置になる。
【0021】
また、請求項3記載の発明においては、予め設定された押圧力に達することを確実に検出できる押圧力検出手段を簡易な構成で実現できることになる。
【0022】
また、請求項4記載の発明においては、押圧力センサ部を、電動ドライバでネジを押圧することで生ずる押圧力を精度よく検出できる箇所(例えば駆動構造部など)に設けることが可能になるため、押圧力を効果的に検出できることになる。
【0023】
また、請求項5記載の発明においては、予め設定された回転トルクに達することを確実に検出できる回転トルク検出手段を簡易な構成で実現でき、しかも、回転トルクセンサ部を、電動ドライバの回転軸に生ずる回転トルクを精度よく検出できる箇所(例えば駆動構造部など)に設けることが可能になるため、回転トルクを効果的に検出できることになる。
【0024】
また、請求項6記載の発明においては、例えば、種々のネジ種やネジ締付け作業に応じて電動ドライバに予め設定される各種設定値を設定可能となるため利便性が高く、また、ネジ締付け診断結果が報知されてネジ締付け良否判断が速やかに行えるため、一層効率的なネジ締付けに寄与できるネジ締付け診断装置になる。
【0025】
また、請求項7記載の発明においては、ネジ締付け作業の確実な診断が迅速に行え、また、確実なネジ締付けを行える電動ドライバになる。
【0026】
また、請求項8記載の発明においては、電動ドライバの駆動力の劣化を診断できるから電動ドライバ自体の信頼性を容易に確認でき、ネジ締付け診断の信頼性を更に高めることができることになる。
【0027】
また、請求項9記載の発明においては、電動ドライバのクラッチの遮断回転トルクを変更してネジ締付け強度規格が異なる種々の作業も可能となって利便性がよくなると共に、遮断回転トルクを遠隔操作により設定できるために、例えば多数の電動ドライバをシステム的に管理制御することも容易に可能となる一層実用性に優れた電動ドライバになる。
【図面の簡単な説明】
【0028】
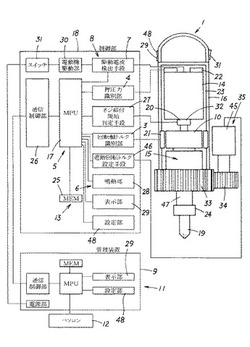
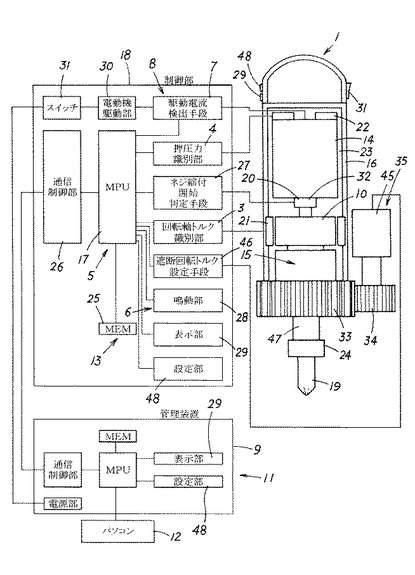
【図1】本実施例に係る電動ドライバ管理システムの構成図である。
【図2】本実施例に係る電動ドライバによるネジ締付け動作説明図である。
【図3】本実施例に係る電動ドライバによる回転トルク判定の説明図である。
【図4】本実施例に係る電動ドライバのネジ締付け状態の説明図である。
【図5】本実施例に係る電動ドライバのクラッチの説明図である。
【発明を実施するための形態】
【0029】
好適と考える本発明の実施形態を、図面に基づいて本発明の作用を示して簡単に説明する。
【0030】
例えば、締付けるネジ2の長さに応じて、締付けが完了したと判断できるネジ締付け最小所要時間と、このネジ締付け最小所要時間以降の所定時間範囲と、電動ドライバ1の回転軸に生ずる回転トルクとを、予め回転トルク検出手段に設定する。
【0031】
また、例えば、ネジ2の締付けを最後まで完全に行えると判断できる押圧力を、予め押圧力検知手段に設定する。
【0032】
従って、電動ドライバ1を用いてネジ2の締付けを行うと、電動ドライバ1の回転軸に生ずる回転トルクが、予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したときにこのことが回転トルク検出手段に検出され、これによりネジ2の締付が完了したことが確認できる。
【0033】
また、電動ドライバ1でネジ2を押圧することで生ずる押圧力が、予め設定された押圧力に達したときにこのことが押圧力検出手段に検出され、これによりネジ2の締付けを最後まで完全に行うに十分な押圧力が加えられていることが確認できる。
【0034】
そこで、本発明では、回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出すると、ネジ締付け診断手段5が、ネジ締付けが正常に行われたと診断する。
【0035】
従って、所定時間範囲内で予め設定された回転トルクに達する回転トルクが発生すると共に、予め設定された押圧力が発生するように正しくネジ締付けが行われると、正しくネジの締付けがなされたと診断することになり、また、この診断結果に基づいてネジ締付けを行うようにすると、ネジ締付け完了時に確実にネジを確実に押圧せしめるように強制し得ることになるから、不完全なネジ締付けを可及的に低減できて、一層確実にネジ締付けを行わしめるネジ締付け診断装置になる。更に、電動ドライバ1を用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0036】
また、例えば、ネジ締付け診断手段5は、回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出した際、押圧力検出手段が予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成した場合には、回転トルクが予め設定された回転トルクに達してネジ締付けが完了したその時点で、電動ドライバ1でネジ2が確実に押圧されることで、ネジ締付けが最後まで確実に行われたことが保証されるため、更に一層確実にネジ締付け診断を行えるネジ締付け診断装置になる。
【0037】
また、例えば、押圧力検出手段を、電動ドライバ1でネジ2を押圧することで生ずる押圧力を検知する押圧力センサ部22と、この押圧力センサ部22で検知した押圧力が予め設定された押圧力に達したことを検出する押圧力識別部4とを備えた構成とした場合には、電動ドライバ1でネジ2を押圧すると、電動ドライバ1に設けた押圧力センサ部22がこの押圧した際に生ずる押圧力を簡単且つ効果的に検知できる箇所に設けることが可能になり、また、この押圧力センサ部22で検知した押圧力を識別する押圧力識別部4も適切な箇所に設けて、電動ドライバ1でネジ2を押圧することで生ずる押圧力を確実に検出できる押圧力検出手段を簡易な構成で実現できることになる。
【0038】
また、例えば、電動ドライバ1に押圧力センサ部22を設けた場合には、押圧力センサ部を、電動ドライバ1でネジ2を押圧することで生ずる押圧力の検出を確実に且つ精度よく行える箇所(例えば駆動構造部など)に設けることが可能になるため、押圧力を効果的に検出できることになる。
【0039】
また、例えば、回転トルク検出手段は、電動ドライバ1でネジ2を回動することで生ずる回転トルクを検知する回転トルクセンサ部21でなり、電動ドライバ1を備え、この電動ドライバ1に回転トルクセンサ部21を設けた場合には、予め設定された回転トルクに達することを確実に検出できる回転トルク検出手段を簡易な構成で実現でき、しかも、回転トルクセンサ部を、電動ドライバの回転軸に生ずる回転トルクを精度よく検出が行える箇所(例えば駆動構造部など)に設けることが可能になるため、回転トルクを効果的に検出できることになる。
【0040】
また、例えば、回転トルク検出手段に予め設定されるネジ締付け最小所要時間,所要時間範囲,回転トルク、並びに、押圧力検出手段に予め設定される押圧力を設定する設定部48と、ネジ締付け診断手段5で診断されたネジ締付け診断結果を報知する報知部6とを備えた場合には、例えば、種々のネジ種やネジ締付け作業に応じて、予め設定されるネジ締付け最小所要時間,所要時間範囲,回転トルク、並びに、押圧力を、例えば、一箇所の設定部48で設定することができ、また、ネジ締付け診断結果を報知部6、例えば、ブザーやランプ等で報知してネジ締付け診断結果を直接認識できるため効率的にネジ締付けが行えることになって、作業性が良好で利便性の高いネジ締付け診断装置になる。
【0041】
また、例えば、電動ドライバ1にネジ締付け診断装置を具備した場合には、例えば、予め設定された回転トルク、ネジ締付け最小所要時間、所定時間範囲、押圧力などを予め設定しておくと、高い信頼性を有するネジ締付け作業を手軽に、速やかに確実に行える電動ドライバになる。
【0042】
また、例えば、電動ドライバ1の電動機14を駆動する駆動電流及びこの電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから電動機14の駆動トルクを算出すると共に、回転トルク検出手段に備えられる回転トルクセンサ部21で電動ドライバ1の回転軸の回転トルクを検知し、算出した駆動トルクと、回転トルクセンサ部21で検知した回転トルクとを比較して電動ドライバ1の駆動力の劣化を診断する駆動力劣化診断手段8を備えた場合には、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから算出した電動機14の駆動トルクと、回転トルクセンサ部21で検出した回転トルクとを比較すると、電動ドライバ1の駆動力の劣化を診断できるから、例えば、電動ドライバ1の回転トルクの低下或いは、電動機、ギア、クラッチの故障を早期に発見できることになり、電動ドライバ1の正常や異常を速やかに確認することが可能になって、電動ドライバの信頼性自体は勿論、ネジ締付け作業の信頼性を確実に向上できることになる。
【0043】
また、例えば、電動ドライバ1に、この電動ドライバ1の回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に、遮断回転トルクを可変設定する遮断トルク調整機構37を設け、この遮断トルク調整機構37の遮断回転トルクを遠隔操作により設定し得る設定部48を備えた場合には、例えば設定部48から遮断回転トルクを遮断トルク調整機構37に遠隔設定すると、電動ドライバ1のクラッチ15にこの遮断回転トルクを設定できることになるため、電動ドライバのクラッチの遮断回転トルクを変更してネジ締付け強度規格が異なる種々の作業も可能となって利便性がよくなると共に、遮断回転トルクを遠隔で確実に設定が可能となり、更には例えば、多数の電動ドライバ1の遮断回転トルクも統一的に管理できる電動ドライバになる。
【実施例】
【0044】
本発明の具体的な実施例について図面に基づいて説明する。
【0045】
本実施例は、電動ドライバ1でネジ2を締付けるネジ締付け作業の作業品質の良否を診断するネジ締付け診断装置13を設け、このネジ締付け診断装置13を電動ドライバ1に内蔵し、この電動ドライバ1を用いてネジ締付けを行う製造ラインにおけるネジ締付け工程を管理する図1に図示した電動ドライバ管理システム11に適用したものである。
【0046】
具体的には、この電動ドライバ管理システム11は、ネジ締付け診断装置13を備えた電動ドライバ1と、管理装置9及びパソコン12とから構成し、ネジ締付け作業品質の向上を図るために作業管理を行うもので、ネジ締付け作業する際の電動ドライバ1の回転軸に生ずる回転トルク(回転軸トルク)と、電動ドライバ1でネジ2を押圧することで生ずる押圧力とが夫々予め設定された大きさでネジ締付けタイミングで生じるか否かによって、ネジ締付け作業の正常と異常を診断して製造ラインにおけるネジ締付け工程を管理するものである。
【0047】
ネジ締付け診断装置13は、電動ドライバ1の回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に電動ドライバ1でネジ2を押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、この回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出すると共に、押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段5とを備えている。
【0048】
回転トルク検出手段は、電動ドライバ1の回転軸に生ずる回転トルクの検出を行う手段であり、回転トルクの検知を行う回転トルクセンサ部21と回転トルクの識別を行う回転トルク識別部3とからなり、電動ドライバ1に回転トルクセンサ部21を設けている。
【0049】
具体的には、回転トルクセンサ部21として磁歪式トルクセンサを後述する電動ドライバ1のクラッチ15の外周部に設けてこの磁歪式トルクセンサからの回転トルク信号を検知し、この回転トルク信号を制御部18内に設けた回転トルク識別部3に入力してこの回転トルク識別部3で予め設定された回転トルクに対応する回転トルク閾値と比較することで、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達した否かを検出する構成である。
【0050】
また、この回転トルク識別部3は、クラッチ15に設けた回転トルクセンサ部21で検知した回転トルクが予め設定された回転トルクに達した際に最大トルク検出と判定し、締付けるネジ種、ネジ長に応じて予め設定されるネジ締付け最小所要時間から所定時間範囲内でネジ締付け完了を判定するネジ締付け完了判定期間を設けて、このネジ締付け完了判定期間に最大トルクが検出されるとネジ締付けの完了と判定する構成である。
【0051】
更に、この回転トルク識別部3は、予め設定された回転トルクを検出した後に回転トルクが急激に垂下状に減少する回転トルク垂下点を検出し、ネジ締付け完了判定期間に回転トルク垂下点を検出することで、一層確実な回転トルクの判定を行う構成である。
【0052】
詳細には、この回転トルク識別部3は、電動ドライバ1をネジ2に押圧することで該電動ドライバ1のネジ締付開始スイッチ20がオンして電動機14が駆動する時点からの時間を計数する計数器を備え、この計数器は、ネジ締付開始スイッチ20がオンすることでネジ締付け最小所要時間から所定時間範囲にネジ締付け完了判定期間信号を生成し、また、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達してクラッチ15の連結が解除されてトルククラッチリミットスイッチ32により電動機14が停止する際、この計数器もリセットされる構成である。
【0053】
この結果、電動ドライバ1内に実装した回転トルクセンサ部21で検知した信号は、回転トルク識別部3で予め設定される回転トルクに対応する回転トルク閾値と比較され、予め設定される回転トルクに達したか否かの識別判定がなされることになる。
【0054】
押圧力検出手段は、電動ドライバ1をネジ2に押圧することで生ずる押圧力を検出する押圧力センサ部22と、この検出した押圧力を予め設定された押圧力に対応する押圧力閾値と比較することで識別を行う押圧力識別部4とからなる。
【0055】
また、押圧力センサ部22を電動ドライバ1内に設け、この押圧力センサ部22として圧電シートを採用し、電動ドライバ1の筐体16内に電動機14を収容する収容部23を設け、この収容部23の壁面の一部と、電動機14の減速器10若しくはクラッチ15側とは反対側の面とで挟み込むように圧電シートを設けることで、ネジ締付け時に電動ドライバ1をネジ2に押圧すると、電動機14が圧電シート22を押圧し、この押圧力によって圧電シート22に電圧を生じ、この電圧を押圧力信号として直接検出する構成である。
【0056】
この結果、電動ドライバ1でネジ2を押圧することで押圧力センサ部22で検知した押圧信号は、押圧力識別部4で押圧力閾値と比較され、予め設定された押圧力閾値に達したか否かの識別判定がなされる。
【0057】
また、本実施例の押圧力識別部4の押圧力閾値は、押圧力の上限、下限を決める二種類の押圧力閾値を備え、押圧力センサ部22で検知した押圧力信号がこの上限下限の閾値で決まる押圧力範囲である場合に適切な押圧力が印加されていると判定する構成であるが、下限閾値のみを備えた構成でもよい。
【0058】
本実施例では、この上下限の押圧力閾値を設けることによって、適切な押圧力の検出を行い、押圧力の過不足時に後述する報知部6で警報を発する構成である。
【0059】
更に、この押圧力識別部4には、加速度センサと及び上下操作方向の選択設定機能を備え、電動ドライバ1のビットを上側に向けたり、下側に向けたりする電動ドライバ1の向きによって押圧力閾値を自動的に変更して押圧力識別部4の識別動作を行うことで、電動ドライバ1の向きで押圧力識別に制限を生じない構成である。
【0060】
このように加速度センサを押圧力識別部4に備えることで重力方向を検出できることになり、従って上下操作方向の選択設定機能によって予めこの電動ドライバ1の上下操作方向を決めておけば、電動ドライバ1を上下いずれの方向に向けても正しく押圧力を判定できることになる。
【0061】
ネジ締付け診断手段5は、回転トルク検出手段における回転トルク識別部3で、予め設定されるネジ締付け最小所要時間から所定時間範囲のネジ締付け完了判定期間に回転トルクが予め設定された回転トルクに達したことを判定した際に、予め設定された押圧力に達する押圧力が押圧力検出手段における押圧力識別部4で識別され、予め設定された押圧力が予め設定された所定の期間維持されている場合にはネジ締付け作業が正常に行われたと診断し、それ以外の場合にはネジ締付け作業が正常に行われなかったと診断する構成としたことで、締付け完了時に適切な押圧力が加わってネジ締付けが正しく行われたことを保証している。
【0062】
詳細には、ネジ締付け完了判定期間に予め設定した回転トルクに達した後、回転トルクが垂下してネジ締付けが完了したことを前記回転トルク識別部3で判定した後にも、予め設定された押圧力に達する押圧力が生じたと押圧力識別部4で判定され、この押圧力が予め設定された時間維持されている場合にネジ締付け作業が正常に行われたと診断することで、更に一層確実な診断を可能としている。
【0063】
即ち、回転トルク識別部3で、ネジ締付け完了判定期間に回転トルクが予め設定された回転トルクに達したことを判定した際、予め設定された押圧力に達する押圧力が押圧力識別部4で識別され、予め設定された押圧力が予め設定された所定の期間維持されている場合にはネジ締付け作業が正常に行われたと診断し、それ以外の場合にはネジ締付け作業が正常に行われなかったと診断する構成である。
【0064】
以上の構成から成るネジ締付け診断装置13を用いると、電動ドライバ1でネジ2を押圧してネジ締付けする際、締付けるネジ2の長さに応じて設定したネジ締付け最小所要時間から所定時間範囲内で、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達すると、電動ドライバ1が停止してネジ2の締付けが完了することになり、更に、このネジ2の締付け完了時点及びそれ以降の予め設定した時間、電動ドライバ1でネジ2を予め設定された押圧力に達する押圧力で押圧した状態が維持されていることを検出した場合、電動ドライバ1によるネジ締付け作業が正常に行われたと診断するものであり、これ以外の状態、例えば、ネジの空転、ガジリ、ネジ頭ナメなどによって所定のタイミングでネジ締付けができない場合や、ネジ締付け完了時に電動ドライバ1をネジにきちんと押圧していない状態ではネジ締付けが正常に行われず、異常と診断できることになる。
【0065】
よって、所定時間範囲に予め設定された回転トルクに達する回転トルクが加わると共に、予め設定された押圧力が所定時間維持されるようにネジ締付け作業を管理することで、不完全なネジの締付け状態を確実に検出できることになってネジ締付け状態の診断を行えることになる。
【0066】
また、作業者に対して、この診断結果に基づいてネジ締付けを行うように習熟させることで、ネジ締付け完了時に確実にネジ2を確実に押圧せしめるように強制し得ることになるから、不完全なネジ締付けを可及的に低減できて、一層確実にネジ締付けを行わしめるネジ締付け診断装置13になる。更に、このネジ締付け診断装置13を備えた電動ドライバ1を用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0067】
また、ネジ締付け診断装置13は、電動ドライバ1と後述する管理装置9との間でデータを転送しあうためのデータ通信制御手段26を備え、電動ドライバ1に予め設定されるネジ種、ネジ長、ネジ締付け最小所要時間、ネジ締付け完了判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などのパラメータを管理装置9から受信し、また、ネジ締付け診断結果、詳細診断データ、例えば、検知した回転トルク、検知した押圧力、電動ドライバ1の駆動力の自己診断結果、更に予め設定されて保持しているパラメータ、例えば、設定したネジ種、ネジ長、ネジ締付け最小所定時間や所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などを管理装置9に送信し得る構成であると共に、電動ドライバ1の自己診断手段として駆動力劣化診断手段8を備えた構成である。
【0068】
この駆動力劣化診断手段8は、電動ドライバ1の電動機14を駆動する駆動電流及び電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから電動機14の駆動トルクを算出すると共に、回転トルクセンサ部21で電動ドライバ1の回転軸に生ずる回転トルクを検知し、算出した駆動トルクと、回転トルクセンサ部21で検知した信号によって得られる回転トルクとを比較して電動ドライバ1の電動機14の駆動力の劣化や、回転トルクセンサ部21や押圧力センサ部22などのセンサ類の劣化などに起因する電動ドライバ1自身の診断を行える構成であり、電動ドライバ1に設けた設定部48で自己診断モードにすることで電動ドライバ1の自己診断を行えるようにしている。
【0069】
従って、電動機14の回転トルクの低下などによる駆動力の劣化判定を行って電動ドライバ1の自己診断が可能になり、ネジ締付け作業の信頼性の確認を速やかに確認できることになるため、電動ドライバ1自体は勿論、製造現場におけるネジ締付け作業の信頼性を確実に向上できることになる。
【0070】
また、ネジ締付け診断装置13は、ネジ締付け診断手段5で診断されたネジ締付け診断結果を通信制御手段26を介して管理装置9に通知すると共に、電動ドライバ1自体に設けたブザー鳴動音によって可聴し、若しくはランプ表示により視認して報知する報知部6を設けることで、ネジ締付け中にもネジ締付け診断結果をブザー鳴動させて可聴でき、またランプ表示で視認できるため、診断結果を直ちに認識でき効率的なネジ締付け作業を行えることになる。
【0071】
電動ドライバ1は、電動機14、減速機10及びクラッチ15を同軸状に配設して筒状の筐体16内に設ける共に、回転トルクを検知する回転トルクセンサ部21,押圧力を検知する押圧力センサ部22及び制御部18も筐体16内に設けたことで、電動ドライバ1内の回転トルク及び押圧力が発生する部位に近接した適切な箇所に設けることができ、回転トルク及び押圧力を直接、効果的に検出できて簡易な構成となる。
【0072】
制御部18は、MPU17、メモリ25、通信制御手段26、回転トルク検出手段、押圧力検出手段、ネジ締付開始判定手段27、ネジ締付け診断結果の報知手段6としてのブザーなどの鳴動部28やランプなどの表示部29、電動機14への給電を行う電動機駆動部30、電動機14の駆動電流及び駆動回転数を検出する駆動電流検出手段7などを構成する各種電子部品類を印刷配線基板上に搭載し、ネジ締付け診断装置13の機能をソフトウェアとして組み込み実装して、上記の回転トルクセンサ部21及び押圧力センサ部22の夫々の出力信号は、制御部18に設けられたネジ締付け診断装置13の回転トルク識別部3、押圧力識別部4で識別判定される構成である。
【0073】
また、電動機14はブラシレスモータを採用し、この電動機14の回転によって電動ドライバ1の先端に設けたドライバビット19を回転する構成であり、更にこの電動機14とドライッバビット19との間に、電動機14の回転速度を減速する遊星ギアからなる減速機10と、この減速機10とドライバビット19間の連結を遮断制御するクラッチ15とを設け、このクラッチ15にビットフォルダ47及びチャック24を介してドライバビット19を取り付ける構成である。
【0074】
また、クラッチ15は、ネジ締付時の回転トルクが予め設定した回転トルクに達すると電動機14や減速機10など駆動源の回転トルクの負荷側への伝達を遮断する構成であり、更に、ネジ締付開始スイッチ20及びトルククラッチリミットスイッチ32を付設して、電動ドライバ1をネジ2に押圧してネジ締付開始スイッチ20がオンすると電動機14が駆動し、予め設定した回転トルクになってクラッチ15が遮断動作するとトルククラッチリミットスイッチ32により電動機14の駆動を停止する構成である。
【0075】
また、この電動ドライバ1は、ネジ種、ネジ長、ネジ締付け最小所要時間、判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間のパラメータを一旦設定すると、管理装置9を接続しなくとも単独でもネジ締付け結果の診断を行うことが可能である。
【0076】
また、電動ドライバ1は、この電動ドライバ1で生ずる回転トルクが予め設定した遮断回転トルクに達すると電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に遮断回転トルクを予め設定する遮断トルク調整機構37を設け、予め設定した遮断回転トルクに固定した構成である。
【0077】
本実施例では更に、クラッチ15の遮断回転トルクを可変設定する遮断トルク調整機構37をパソコン12、若しくは管理装置9の設定部48から制御して、電動ドライバ1のクラッチ15の遮断回転トルクを遠隔設定し得る構成である。
【0078】
具体的には、このクラッチ15のトルク圧調整機構36に遮断トルク調整機構37を設けて、管理装置9若しくはパソコン12の設定部で遮断回転トルクを設定するとクラッチ15の遮断トルク値を予め設定した値に可変設定し得るように構成し、管理装置9若しくはパソコン12から電動ドライバ1に対してこの予め設定する遮断回転トルクを指示、転送することで、電動ドライバ1のクラッチ15のトルククラッチ圧力を調整して所定の遮断回転トルクでクラッチ15を遮断作動できるように構成している。
【0079】
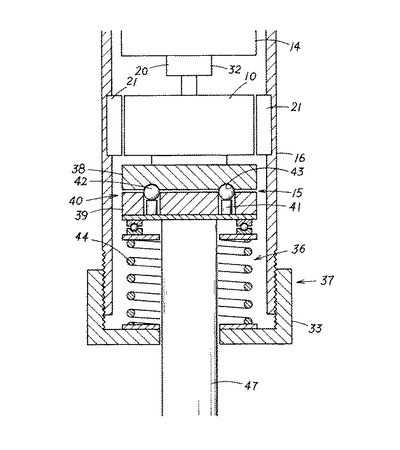
詳細には、電動ドライバ1のクラッチ15は、電動機14及び減速機10などの駆動源側に結合する駆動部材38と、チャック24及びドライバビット19などの被駆動側に結合する被駆動部材39と、この駆動部材38と被駆動部材39との間にカム機構40を備え、更に被駆動部材39を駆動部材38に対して所定のバネ44の弾性力で押圧することでトルク圧を調整可能としたトルク圧調整機構36を備えて駆動源側と被駆動側との間を所定の回転トルクで遮断制御する構成である。
【0080】
更に詳細には、このクラッチ15のカム機構40をカム棒41と剛球42とこの剛球42を保持する溝43とで構成し、更に、被駆動部材39を駆動部材38に対して所定のバネ44の弾性力で押圧することでトルク圧を調整可能としたトルク圧調整機構36を備え、被駆動部材39を駆動部材38に押圧すると剛球42が溝43に係合して駆動部材38のトルクが被駆動部材39に伝達し、回転トルクがトルク圧調整機構36によって予め設定した所定遮断回転トルクに達すると、剛球42と溝43との係合が外れてトルク伝達が遮断制御する構成である。
【0081】
本実施例は、クラッチ15のトルク圧調整機構36を構成するバネ44の保持部の外周にレバーギア33を設けて遮断トルク調整機構37を構成し、このレバーギア33を電動ドライバ1の外面に設け、このレバーギア33を所定角度だけ回動するとバネ44が伸張し、このバネ44の弾性力を可変することで遮断回転トルクの調整及び設定が可能となる。
【0082】
また更に、電動ドライバ1の遮断回転トルクを設定するトルク調整用電動機35を備え、このトルク調整用電動機35を電動ドライバ1のレバーギア33に結合し、このトルク調整用電動機35を管理装置9からの指示で所定角度だけ回動することで電動ドライバ1の遮断回転トルクを適宜に変更設定し得るように構成している。
【0083】
このトルク調整用電動機35は、ステッピングモータ45の回転軸に調整ギア34を設け、この調整ギア34を電動ドライバ1のレバーギア33と係合させステッピングモータ45を所定角度回転させると、電動ドライバ1の遮断回転トルクを適宜の値に設定できる。
【0084】
また本実施例では、電動ドライバ1に内蔵される制御部18にこのステッピングモータ45へ印加するパルス信号を生成して回転角度を指示してクラッチ15の遮断回転トルクを設定する遮断回転トルク設定手段46を設け、管理装置9或いはパソコン12でこのトルク調整用電動機35に遮断回転トルクを指示し、この設定された遮断回転トルクを電動ドライバ1の制御部18に通知することで、電動ドライバ1のクラッチ15の遮断回転トルクを調整若しくは設定し得るように構成している。
【0085】
本実施例はこのように構成したので、管理装置9若しくはパソコン12から電動ドライバ1に対して、遮断回転トルクを指示、転送すると、制御部18に設けた通信制御手段26を介して遮断回転トルク設定手段46で遮断回転トルクに対応する回転角度が算出されてトルク調整用電動機35のステッピングモータ45がこの回転角度だけ回転すると、調整ギア34とレバーギア33で結合された遮断トルク調整機構37が回動し、トルク圧調整機構36に設けられたバネ44を変位させてトルク圧を調整することになって、電動ドライバ1のクラッチ15のトルククラッチ圧力を調整して所定の遮断回転トルクでクラッチ15を作動できることになる。
【0086】
従って、製造現場のネジ締付け工程で用いる電動ドライバ1のトルク設定を適宜行うことが可能になると共に、校正や調整などのトルク管理をも統一的に行うことが可能になって一層確実にネジ締付工程の運用管理を行える電動ドライバ及び電動ドライバ管理システムになる。
【0087】
管理装置9及びパソコン12は、ネジ締付け作業内容によって予め設定されるネジ種、ネジ長、ネジ締付け最小所要時間、ネジ締付け完了判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などの各種パラメータを設定部48で設定して、電動ドライバ1に内蔵されたネジ締付け診断装置13にこれらのパラメータを送信して遠隔設定させる他、電動ドライバ1でネジ2を締付けして診断した結果や、電動ドライバ1に保持させた各種パラメータや各種データを読み出して確認したり、電動ドライバ1から送達された各種データを蓄積、処理、表示して電動ドライバ1によるネジ締付け作業や工程を管理し得る構成である。
【0088】
以上のように電動ドライバ1と管理装置9とパソコン12とで構成した本実施例の電動ドライバ管理システム11は、パソコン12で、ネジ種、ネジ長、ネジ締付け最小所要時間、所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などのパラメータを予め設定して、管理装置9を介して、電動ドライバ1にこれらの各種パラメータを転送してこの各種パラメータを電動ドライバ1に設定する。次いで、ネジ締付け作業を行うと、このネジ締付け作業の判定された結果をネジ締付けしながら、ランプやブザーなどの報知手段6によって直ちに診断結果を確認できると共に、管理装置9若しくはパソコン12に診断結果が送達される。また、ネジ締付け時の回転トルク及び押圧力、押圧力の維持時間、駆動電流、駆動回転数の測定データなどを時系列データとして送達することで、管理装置9若しくはパソコン12で、例えば、これらの時系列データからネジ締付け状態の経時変化及び各種統計解析を行ってネジ締付け工程の管理を行えることになる。
【0089】
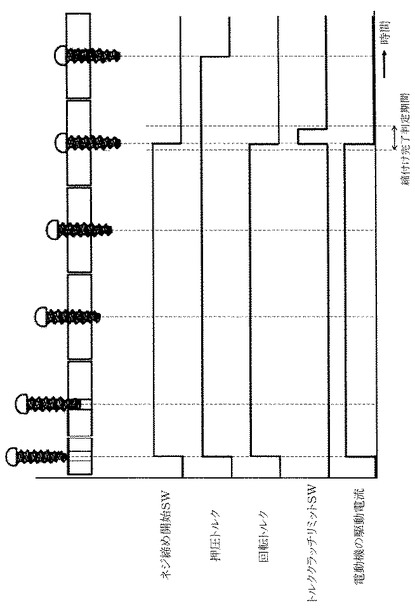
本実施例の電動ドライバ管理システム11を用いて電動ドライバ1でネジ締付け作業を行った際の回転トルク及び押圧力の時間変化を模式的に現わすと図3のようになる。尚、この場合、M3×6mmのネジ2を用いたネジ締付けの最小所要時間を540ミリ秒とし、この最小所要時間から所定時間範囲にネジ締付け完了を判定するネジ締付け完了判定期間を設けている。
【0090】
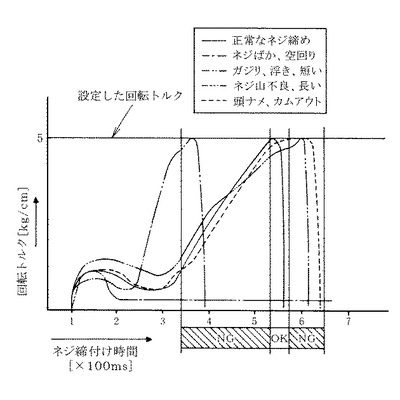
この図3に示すように、ネジ締付け時にネジが空回りした場合、ネジがネジ山に食付いた所謂、ガジリ状態の場合、ネジ山不良の場合、ネジの頭ナメの場合などではネジ締付け時間が所定のネジ締付け完了判定期間ではネジ締付けは正常に行われないため、ネジ締付け診断結果も異常と診断され、また、本実施例ではネジ締付け完了判定期間にネジ締付けが行われるだけでなく、電動ドライバ1でネジ2を押圧した際、押圧力が所定量加えられていることを検出することで、正常なネジ締付けが行われたと診断している。
【0091】
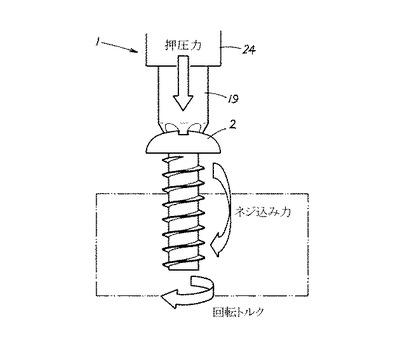
即ち、電動ドライバ1でネジ2をネジ込む時には、図4のようにネジ2を押圧することによる推進力のあるネジ込み力が必要であるが、本実施例では、このネジ込み力を押圧方向成分である押圧力と、これと直交する成分である回転トルクとの双方を検出し、つまり、電動ドライバ1でネジ2を締付ける際の電動ドライバ1の回転軸に生ずる回転トルクだけでなく、電動ドライバ1でネジ2を押圧することで生ずる押圧力、特に、ネジ締付け完了時に最後の一締めとなる押圧力及びこの押圧力の維持時間を評価することでネジ締付けの品質を正確に評価、診断できることになる。
【0092】
本実施例は、ネジ締付けをネジ締付け完了が、予め設定される押圧力が予め設定される時期に行われたか否かを診断することで、ネジ締めの実態を正しく反映したネジ締付け診断装置13を内蔵した電動ドライバ1を実現し、その結果、例えば製造現場におけるネジ締付け作業状況を把握して管理できる電動ドライバ管理システム11になるだけでなく、この診断に沿うようにネジ締付け作業に習熟することで、極めて高い信頼性のネジ締め工程を実現できることになり、従って、この電動ドライバ1を用いて製造される各種装置の信頼性及び安全性を高めることができることになる。
【0093】
また、本実施例の電動ドライバ1は駆動力劣化診断手段8によって、所定の押圧力に対する電動機14の回転トルクを確認することで、電動ドライバ1のネジ締付け品質の確認を簡単に手軽に行うことが可能になり、電動ドライバ1の品質のみならず、製造現場における製造品質の維持に寄与できることになる。
【0094】
本実施例では、ネジ種、ネジ長、ネジ締付け最小所要時間を設定するようにしたが、ネジ締付け最小所要時間をネジ種、ネジ長から予め算出した値を設定する場合には、設定パラメータ数を削減できることになる。
【0095】
また、本実施例は、ネジ締付け完了判定期間を、締付けるネジ長に応じて予め設定されるネジ締付け最小所要時間から所定時間範囲に設定したが、締付けるネジ長に応じて予め設定されるネジ締付け最小所要時間以降適宜の時間をあけた後の所定時間範囲に設定する構成でもよく、この場合ネジ締付け完了判定期間の設定自由度を改善できることになる。
【0096】
また、本実施例は、ネジ締付け診断装置13を電動ドライバ1に組み込みソフトウェアとして実装したが、ネジ締付け診断装置13の機能を管理装置9に設けることでもよく、この場合、電動ドライバ1には、回転トルクセンサ部21及び押圧力センサ部22のみを設けておくだけよく電動ドライバ1を安価な構成とすることもできる。
【0097】
尚、本実施例のネジ締付け診断装置13をインパクト電動ドライバに対しても適用することが可能であり、また、各構成要件の具体的構成は適宜設計し得るものである。
【符号の説明】
【0098】
1 電動ドライバ
2 ネジ
4 押圧力識別部
5 ネジ締付け診断手段
6 報知手段
7 駆動電流検出手段
8 駆動力劣化診断手段
14 電動機
15 クラッチ
21 回転トルクセンサ部
22 押圧力センサ部
37 遮断トルク調整機構
48 設定部
【技術分野】
【0001】
本発明は、電動ドライバによるネジ締付け作業を診断するネジ締付け診断装置及びこの装置を用いた電動ドライバに関するものである。
【背景技術】
【0002】
ネジ締付けなどを効率的に行うための電動ドライバが種々提案されている。この種の電動ドライバでは、ネジを締付けるドライバビットを装着するドライバチャックと電動機との間に機械式若しくは電磁式のクラッチ機構を設け、ネジ締めしてネジ座面が着座しネジ締付けトルクが設定値以上になると電動機の駆動を停止、或いは、電動機の駆動を断続させることでより精密な締付けを可能としたものが提案されている(例えば特許文献1、2)。
【0003】
しかし、この種の電動ドライバではネジを締付け設定値以上の締付けトルクになることでドライバビットの回転が停止してネジ締付けが完了するが、あくまで作業者が電動ドライバを手で持って、ドライバビットをネジに押圧した状態でネジを締付けるものであるため、作業者によって、また、同じ作業者でも、ドライバビットの形状の相違や締付け方向や押圧する力の大きさや、また更にネジ締付け終了するタイミングなどによってネジ締付け状態が大きく異なり、ネジの締付けの不足や過大、更に所謂、ネジのドン突き、カジリ、頭ナメなどの不具合が発生することがあり、また、このようなネジ締付け不良状態は装置類を組立てた後からでは、一見して分からないことがあり、しばしば見逃されることもあった。
【0004】
本発明者は、このような製造現場におけるネジ締付け不良を低減するために、ネジ締付け不良現象を分析した結果、ネジ締付けトルク、即ち、電動ドライバの回転軸に生ずる回転トルクの大小だけでなく、締付け時間を制御し、管理することでネジ締付け不良の大半を改善できることを見出し、ネジ締付け作業を行った時点で、直ちにその作業の良否判定を行うことで、効率的なネジ締付け作業を可能にすると共に、確実なネジ締付け作業を図れる電動ドライバのネジ締付け忘れ防止装置を提案した(特許文献3)。
【0005】
この電動ドライバのネジ締付け忘れ防止装置は、ネジ長に応じて締付け最小所要時間を設定し、この最小所要時間以降の所定時間範囲のネジ締付け完了判定期間に電動ドライバの回転軸に生ずる回転トルクが予め設定された回転トルクに達して、ネジ締めが完了できるか否かによりネジ締付けの状態を診断するもので、この診断によりネジ締付け不良を検出し、更にこのような不良と判定されないネジ締付け作業数を計数して予定作業本数と照合することで、ネジ締付け作業状態を管理、評価し、ネジ締付け不良の改善や締め忘れの防止を図るものである。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3663638号公報
【特許文献2】特開2005−238418号公報
【特許文献3】特許第4295063号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、このネジ締付け忘れ防止装置を以ってしても、あくまで作業者が電動ドライバを手で持って、ドライバビットをネジに押圧した状態でネジ締付けするものであるため、作業者によって、また、同じ作業者でも、また用いるドライバビットの形状の相違によっても押圧する力の大きさが異なり、更に、ネジ締付け時、作業者は繰り返し行うネジ締付作業になれることで、締付け完了寸前に反射的に若しくは無意識に電動ドライバをネジから浮かしがちとなってネジの締付けが完全になされず、しばしばネジの微妙な浮きなどを起こしてネジの締付けの不足となることがあった。このような不完全な締付けがなされたネジは経時的に緩んで種々の問題を引き起こす原因となることがある。
【0008】
本発明は、このような、不完全なネジの締付け状態を簡単、確実に検出して確実なネジ締付け作業を行わしめるネジ締付け診断装置を提供し、製造される各種装置の信頼性及び安全性を高めることに寄与し得ることを目的とする。
【課題を解決するための手段】
【0009】
添付図面を参照して本発明の要旨を説明する。
【0010】
電動ドライバ1を用いてネジ2の締付けを行った際のネジ締付け状態の診断を行うネジ締付け診断装置であって、前記電動ドライバ1の回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に前記電動ドライバ1で前記ネジ2を押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段5とを備えたことを特徴とするネジ締付け診断装置に係るものである。
【0011】
また、前記ネジ締付け診断手段5は、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出した際、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成したことを特徴とする請求項1記載のネジ締付け診断装置に係るものである。
【0012】
また、前記押圧力検出手段は、前記電動ドライバ1で前記ネジ2を押圧することで生ずる前記押圧力を検知する押圧力センサ部22と、この押圧力センサ部22で検知した前記押圧力が予め設定された押圧力に達したことを検出する押圧力識別部4とからなることを特徴とする請求項1,2のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0013】
また、前記電動ドライバ1を備え、この電動ドライバ1に前記押圧力センサ部22を設けたことを特徴とする請求項3記載のネジ締付け診断装置に係るものである。
【0014】
また、前記回転トルク検出手段は、前記電動ドライバ1で前記ネジ2を回動することで生ずる前記回転トルクを検知する回転トルクセンサ部21でなり、前記電動ドライバ1を備え、この電動ドライバ1に前記回転トルクセンサ部21を設けたことを特徴とする請求項1〜4のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0015】
また、前記回転トルク検出手段に予め設定される前記ネジ締付け最小所要時間,前記所要時間範囲,前記回転トルク、並びに、前記押圧力検出手段に予め設定される前記押圧力を設定する設定部48と、前記ネジ締付け診断手段5で診断されたネジ締付け診断結果を報知する報知部6とを備えたことを特徴とする請求項1〜5のいずれか1項に記載のネジ締付け診断装置に係るものである。
【0016】
また、請求項1〜6のいずれか1項に記載のネジ締付け診断装置を具備したことを特徴とする電動ドライバに係るものである。
【0017】
また、前記電動ドライバ1の電動機14を駆動する駆動電流及びこの電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した前記駆動電流と前記駆動回転数とから前記電動機14の駆動トルクを算出すると共に、前記回転トルク検出手段に備えた回転トルクセンサ部21で前記電動ドライバ1の回転軸の回転トルクを検知し、前記算出した駆動トルクと、前記回転トルクセンサ部21で検知した回転トルクとを比較して前記電動ドライバ1の駆動力の劣化を診断する駆動力劣化診断手段8を備えたことを特徴とする請求項7記載の電動ドライバに係るものである。
【0018】
また、前記電動ドライバ1に、この電動ドライバ1の回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると前記電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に、前記遮断回転トルクを可変設定する遮断トルク調整機構37を設け、この遮断トルク調整機構37の遮断回転トルクを遠隔操作により設定し得る設定部48を備えたことを特徴とする請求項7,8のいずれか1項に記載の電動ドライバに係るものである。
【発明の効果】
【0019】
本発明は上述のように構成したから、電動ドライバの回転軸に生ずる回転トルクと、電動ドライバでネジを押圧することで生ずる押圧力とから正しくネジの締付けが行われたことを検出できることになり、その結果、ネジ締付け完了時にも確実にネジを押圧させるようにネジ締付け作業を強制し得ることになって、不完全なネジ締付け状態を可及的に低減して確実なネジ締付け作業を行わしめるネジ締付け診断装置になると共に、このネジ締付け診断装置を採用した電動ドライバを用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0020】
また、請求項2記載の発明においては、予め設定された回転トルクが発生した際に予め設定された押圧力が維持されていることを検出することで正常なネジ締付けが行われたと診断されることになり、より一層確実なネジ締付け診断を行えるネジ締付け診断装置になる。
【0021】
また、請求項3記載の発明においては、予め設定された押圧力に達することを確実に検出できる押圧力検出手段を簡易な構成で実現できることになる。
【0022】
また、請求項4記載の発明においては、押圧力センサ部を、電動ドライバでネジを押圧することで生ずる押圧力を精度よく検出できる箇所(例えば駆動構造部など)に設けることが可能になるため、押圧力を効果的に検出できることになる。
【0023】
また、請求項5記載の発明においては、予め設定された回転トルクに達することを確実に検出できる回転トルク検出手段を簡易な構成で実現でき、しかも、回転トルクセンサ部を、電動ドライバの回転軸に生ずる回転トルクを精度よく検出できる箇所(例えば駆動構造部など)に設けることが可能になるため、回転トルクを効果的に検出できることになる。
【0024】
また、請求項6記載の発明においては、例えば、種々のネジ種やネジ締付け作業に応じて電動ドライバに予め設定される各種設定値を設定可能となるため利便性が高く、また、ネジ締付け診断結果が報知されてネジ締付け良否判断が速やかに行えるため、一層効率的なネジ締付けに寄与できるネジ締付け診断装置になる。
【0025】
また、請求項7記載の発明においては、ネジ締付け作業の確実な診断が迅速に行え、また、確実なネジ締付けを行える電動ドライバになる。
【0026】
また、請求項8記載の発明においては、電動ドライバの駆動力の劣化を診断できるから電動ドライバ自体の信頼性を容易に確認でき、ネジ締付け診断の信頼性を更に高めることができることになる。
【0027】
また、請求項9記載の発明においては、電動ドライバのクラッチの遮断回転トルクを変更してネジ締付け強度規格が異なる種々の作業も可能となって利便性がよくなると共に、遮断回転トルクを遠隔操作により設定できるために、例えば多数の電動ドライバをシステム的に管理制御することも容易に可能となる一層実用性に優れた電動ドライバになる。
【図面の簡単な説明】
【0028】
【図1】本実施例に係る電動ドライバ管理システムの構成図である。
【図2】本実施例に係る電動ドライバによるネジ締付け動作説明図である。
【図3】本実施例に係る電動ドライバによる回転トルク判定の説明図である。
【図4】本実施例に係る電動ドライバのネジ締付け状態の説明図である。
【図5】本実施例に係る電動ドライバのクラッチの説明図である。
【発明を実施するための形態】
【0029】
好適と考える本発明の実施形態を、図面に基づいて本発明の作用を示して簡単に説明する。
【0030】
例えば、締付けるネジ2の長さに応じて、締付けが完了したと判断できるネジ締付け最小所要時間と、このネジ締付け最小所要時間以降の所定時間範囲と、電動ドライバ1の回転軸に生ずる回転トルクとを、予め回転トルク検出手段に設定する。
【0031】
また、例えば、ネジ2の締付けを最後まで完全に行えると判断できる押圧力を、予め押圧力検知手段に設定する。
【0032】
従って、電動ドライバ1を用いてネジ2の締付けを行うと、電動ドライバ1の回転軸に生ずる回転トルクが、予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したときにこのことが回転トルク検出手段に検出され、これによりネジ2の締付が完了したことが確認できる。
【0033】
また、電動ドライバ1でネジ2を押圧することで生ずる押圧力が、予め設定された押圧力に達したときにこのことが押圧力検出手段に検出され、これによりネジ2の締付けを最後まで完全に行うに十分な押圧力が加えられていることが確認できる。
【0034】
そこで、本発明では、回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出すると、ネジ締付け診断手段5が、ネジ締付けが正常に行われたと診断する。
【0035】
従って、所定時間範囲内で予め設定された回転トルクに達する回転トルクが発生すると共に、予め設定された押圧力が発生するように正しくネジ締付けが行われると、正しくネジの締付けがなされたと診断することになり、また、この診断結果に基づいてネジ締付けを行うようにすると、ネジ締付け完了時に確実にネジを確実に押圧せしめるように強制し得ることになるから、不完全なネジ締付けを可及的に低減できて、一層確実にネジ締付けを行わしめるネジ締付け診断装置になる。更に、電動ドライバ1を用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0036】
また、例えば、ネジ締付け診断手段5は、回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出した際、押圧力検出手段が予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成した場合には、回転トルクが予め設定された回転トルクに達してネジ締付けが完了したその時点で、電動ドライバ1でネジ2が確実に押圧されることで、ネジ締付けが最後まで確実に行われたことが保証されるため、更に一層確実にネジ締付け診断を行えるネジ締付け診断装置になる。
【0037】
また、例えば、押圧力検出手段を、電動ドライバ1でネジ2を押圧することで生ずる押圧力を検知する押圧力センサ部22と、この押圧力センサ部22で検知した押圧力が予め設定された押圧力に達したことを検出する押圧力識別部4とを備えた構成とした場合には、電動ドライバ1でネジ2を押圧すると、電動ドライバ1に設けた押圧力センサ部22がこの押圧した際に生ずる押圧力を簡単且つ効果的に検知できる箇所に設けることが可能になり、また、この押圧力センサ部22で検知した押圧力を識別する押圧力識別部4も適切な箇所に設けて、電動ドライバ1でネジ2を押圧することで生ずる押圧力を確実に検出できる押圧力検出手段を簡易な構成で実現できることになる。
【0038】
また、例えば、電動ドライバ1に押圧力センサ部22を設けた場合には、押圧力センサ部を、電動ドライバ1でネジ2を押圧することで生ずる押圧力の検出を確実に且つ精度よく行える箇所(例えば駆動構造部など)に設けることが可能になるため、押圧力を効果的に検出できることになる。
【0039】
また、例えば、回転トルク検出手段は、電動ドライバ1でネジ2を回動することで生ずる回転トルクを検知する回転トルクセンサ部21でなり、電動ドライバ1を備え、この電動ドライバ1に回転トルクセンサ部21を設けた場合には、予め設定された回転トルクに達することを確実に検出できる回転トルク検出手段を簡易な構成で実現でき、しかも、回転トルクセンサ部を、電動ドライバの回転軸に生ずる回転トルクを精度よく検出が行える箇所(例えば駆動構造部など)に設けることが可能になるため、回転トルクを効果的に検出できることになる。
【0040】
また、例えば、回転トルク検出手段に予め設定されるネジ締付け最小所要時間,所要時間範囲,回転トルク、並びに、押圧力検出手段に予め設定される押圧力を設定する設定部48と、ネジ締付け診断手段5で診断されたネジ締付け診断結果を報知する報知部6とを備えた場合には、例えば、種々のネジ種やネジ締付け作業に応じて、予め設定されるネジ締付け最小所要時間,所要時間範囲,回転トルク、並びに、押圧力を、例えば、一箇所の設定部48で設定することができ、また、ネジ締付け診断結果を報知部6、例えば、ブザーやランプ等で報知してネジ締付け診断結果を直接認識できるため効率的にネジ締付けが行えることになって、作業性が良好で利便性の高いネジ締付け診断装置になる。
【0041】
また、例えば、電動ドライバ1にネジ締付け診断装置を具備した場合には、例えば、予め設定された回転トルク、ネジ締付け最小所要時間、所定時間範囲、押圧力などを予め設定しておくと、高い信頼性を有するネジ締付け作業を手軽に、速やかに確実に行える電動ドライバになる。
【0042】
また、例えば、電動ドライバ1の電動機14を駆動する駆動電流及びこの電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから電動機14の駆動トルクを算出すると共に、回転トルク検出手段に備えられる回転トルクセンサ部21で電動ドライバ1の回転軸の回転トルクを検知し、算出した駆動トルクと、回転トルクセンサ部21で検知した回転トルクとを比較して電動ドライバ1の駆動力の劣化を診断する駆動力劣化診断手段8を備えた場合には、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから算出した電動機14の駆動トルクと、回転トルクセンサ部21で検出した回転トルクとを比較すると、電動ドライバ1の駆動力の劣化を診断できるから、例えば、電動ドライバ1の回転トルクの低下或いは、電動機、ギア、クラッチの故障を早期に発見できることになり、電動ドライバ1の正常や異常を速やかに確認することが可能になって、電動ドライバの信頼性自体は勿論、ネジ締付け作業の信頼性を確実に向上できることになる。
【0043】
また、例えば、電動ドライバ1に、この電動ドライバ1の回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に、遮断回転トルクを可変設定する遮断トルク調整機構37を設け、この遮断トルク調整機構37の遮断回転トルクを遠隔操作により設定し得る設定部48を備えた場合には、例えば設定部48から遮断回転トルクを遮断トルク調整機構37に遠隔設定すると、電動ドライバ1のクラッチ15にこの遮断回転トルクを設定できることになるため、電動ドライバのクラッチの遮断回転トルクを変更してネジ締付け強度規格が異なる種々の作業も可能となって利便性がよくなると共に、遮断回転トルクを遠隔で確実に設定が可能となり、更には例えば、多数の電動ドライバ1の遮断回転トルクも統一的に管理できる電動ドライバになる。
【実施例】
【0044】
本発明の具体的な実施例について図面に基づいて説明する。
【0045】
本実施例は、電動ドライバ1でネジ2を締付けるネジ締付け作業の作業品質の良否を診断するネジ締付け診断装置13を設け、このネジ締付け診断装置13を電動ドライバ1に内蔵し、この電動ドライバ1を用いてネジ締付けを行う製造ラインにおけるネジ締付け工程を管理する図1に図示した電動ドライバ管理システム11に適用したものである。
【0046】
具体的には、この電動ドライバ管理システム11は、ネジ締付け診断装置13を備えた電動ドライバ1と、管理装置9及びパソコン12とから構成し、ネジ締付け作業品質の向上を図るために作業管理を行うもので、ネジ締付け作業する際の電動ドライバ1の回転軸に生ずる回転トルク(回転軸トルク)と、電動ドライバ1でネジ2を押圧することで生ずる押圧力とが夫々予め設定された大きさでネジ締付けタイミングで生じるか否かによって、ネジ締付け作業の正常と異常を診断して製造ラインにおけるネジ締付け工程を管理するものである。
【0047】
ネジ締付け診断装置13は、電動ドライバ1の回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に電動ドライバ1でネジ2を押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、この回転トルク検出手段が最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出すると共に、押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段5とを備えている。
【0048】
回転トルク検出手段は、電動ドライバ1の回転軸に生ずる回転トルクの検出を行う手段であり、回転トルクの検知を行う回転トルクセンサ部21と回転トルクの識別を行う回転トルク識別部3とからなり、電動ドライバ1に回転トルクセンサ部21を設けている。
【0049】
具体的には、回転トルクセンサ部21として磁歪式トルクセンサを後述する電動ドライバ1のクラッチ15の外周部に設けてこの磁歪式トルクセンサからの回転トルク信号を検知し、この回転トルク信号を制御部18内に設けた回転トルク識別部3に入力してこの回転トルク識別部3で予め設定された回転トルクに対応する回転トルク閾値と比較することで、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達した否かを検出する構成である。
【0050】
また、この回転トルク識別部3は、クラッチ15に設けた回転トルクセンサ部21で検知した回転トルクが予め設定された回転トルクに達した際に最大トルク検出と判定し、締付けるネジ種、ネジ長に応じて予め設定されるネジ締付け最小所要時間から所定時間範囲内でネジ締付け完了を判定するネジ締付け完了判定期間を設けて、このネジ締付け完了判定期間に最大トルクが検出されるとネジ締付けの完了と判定する構成である。
【0051】
更に、この回転トルク識別部3は、予め設定された回転トルクを検出した後に回転トルクが急激に垂下状に減少する回転トルク垂下点を検出し、ネジ締付け完了判定期間に回転トルク垂下点を検出することで、一層確実な回転トルクの判定を行う構成である。
【0052】
詳細には、この回転トルク識別部3は、電動ドライバ1をネジ2に押圧することで該電動ドライバ1のネジ締付開始スイッチ20がオンして電動機14が駆動する時点からの時間を計数する計数器を備え、この計数器は、ネジ締付開始スイッチ20がオンすることでネジ締付け最小所要時間から所定時間範囲にネジ締付け完了判定期間信号を生成し、また、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達してクラッチ15の連結が解除されてトルククラッチリミットスイッチ32により電動機14が停止する際、この計数器もリセットされる構成である。
【0053】
この結果、電動ドライバ1内に実装した回転トルクセンサ部21で検知した信号は、回転トルク識別部3で予め設定される回転トルクに対応する回転トルク閾値と比較され、予め設定される回転トルクに達したか否かの識別判定がなされることになる。
【0054】
押圧力検出手段は、電動ドライバ1をネジ2に押圧することで生ずる押圧力を検出する押圧力センサ部22と、この検出した押圧力を予め設定された押圧力に対応する押圧力閾値と比較することで識別を行う押圧力識別部4とからなる。
【0055】
また、押圧力センサ部22を電動ドライバ1内に設け、この押圧力センサ部22として圧電シートを採用し、電動ドライバ1の筐体16内に電動機14を収容する収容部23を設け、この収容部23の壁面の一部と、電動機14の減速器10若しくはクラッチ15側とは反対側の面とで挟み込むように圧電シートを設けることで、ネジ締付け時に電動ドライバ1をネジ2に押圧すると、電動機14が圧電シート22を押圧し、この押圧力によって圧電シート22に電圧を生じ、この電圧を押圧力信号として直接検出する構成である。
【0056】
この結果、電動ドライバ1でネジ2を押圧することで押圧力センサ部22で検知した押圧信号は、押圧力識別部4で押圧力閾値と比較され、予め設定された押圧力閾値に達したか否かの識別判定がなされる。
【0057】
また、本実施例の押圧力識別部4の押圧力閾値は、押圧力の上限、下限を決める二種類の押圧力閾値を備え、押圧力センサ部22で検知した押圧力信号がこの上限下限の閾値で決まる押圧力範囲である場合に適切な押圧力が印加されていると判定する構成であるが、下限閾値のみを備えた構成でもよい。
【0058】
本実施例では、この上下限の押圧力閾値を設けることによって、適切な押圧力の検出を行い、押圧力の過不足時に後述する報知部6で警報を発する構成である。
【0059】
更に、この押圧力識別部4には、加速度センサと及び上下操作方向の選択設定機能を備え、電動ドライバ1のビットを上側に向けたり、下側に向けたりする電動ドライバ1の向きによって押圧力閾値を自動的に変更して押圧力識別部4の識別動作を行うことで、電動ドライバ1の向きで押圧力識別に制限を生じない構成である。
【0060】
このように加速度センサを押圧力識別部4に備えることで重力方向を検出できることになり、従って上下操作方向の選択設定機能によって予めこの電動ドライバ1の上下操作方向を決めておけば、電動ドライバ1を上下いずれの方向に向けても正しく押圧力を判定できることになる。
【0061】
ネジ締付け診断手段5は、回転トルク検出手段における回転トルク識別部3で、予め設定されるネジ締付け最小所要時間から所定時間範囲のネジ締付け完了判定期間に回転トルクが予め設定された回転トルクに達したことを判定した際に、予め設定された押圧力に達する押圧力が押圧力検出手段における押圧力識別部4で識別され、予め設定された押圧力が予め設定された所定の期間維持されている場合にはネジ締付け作業が正常に行われたと診断し、それ以外の場合にはネジ締付け作業が正常に行われなかったと診断する構成としたことで、締付け完了時に適切な押圧力が加わってネジ締付けが正しく行われたことを保証している。
【0062】
詳細には、ネジ締付け完了判定期間に予め設定した回転トルクに達した後、回転トルクが垂下してネジ締付けが完了したことを前記回転トルク識別部3で判定した後にも、予め設定された押圧力に達する押圧力が生じたと押圧力識別部4で判定され、この押圧力が予め設定された時間維持されている場合にネジ締付け作業が正常に行われたと診断することで、更に一層確実な診断を可能としている。
【0063】
即ち、回転トルク識別部3で、ネジ締付け完了判定期間に回転トルクが予め設定された回転トルクに達したことを判定した際、予め設定された押圧力に達する押圧力が押圧力識別部4で識別され、予め設定された押圧力が予め設定された所定の期間維持されている場合にはネジ締付け作業が正常に行われたと診断し、それ以外の場合にはネジ締付け作業が正常に行われなかったと診断する構成である。
【0064】
以上の構成から成るネジ締付け診断装置13を用いると、電動ドライバ1でネジ2を押圧してネジ締付けする際、締付けるネジ2の長さに応じて設定したネジ締付け最小所要時間から所定時間範囲内で、電動ドライバ1の回転軸に生ずる回転トルクが予め設定された回転トルクに達すると、電動ドライバ1が停止してネジ2の締付けが完了することになり、更に、このネジ2の締付け完了時点及びそれ以降の予め設定した時間、電動ドライバ1でネジ2を予め設定された押圧力に達する押圧力で押圧した状態が維持されていることを検出した場合、電動ドライバ1によるネジ締付け作業が正常に行われたと診断するものであり、これ以外の状態、例えば、ネジの空転、ガジリ、ネジ頭ナメなどによって所定のタイミングでネジ締付けができない場合や、ネジ締付け完了時に電動ドライバ1をネジにきちんと押圧していない状態ではネジ締付けが正常に行われず、異常と診断できることになる。
【0065】
よって、所定時間範囲に予め設定された回転トルクに達する回転トルクが加わると共に、予め設定された押圧力が所定時間維持されるようにネジ締付け作業を管理することで、不完全なネジの締付け状態を確実に検出できることになってネジ締付け状態の診断を行えることになる。
【0066】
また、作業者に対して、この診断結果に基づいてネジ締付けを行うように習熟させることで、ネジ締付け完了時に確実にネジ2を確実に押圧せしめるように強制し得ることになるから、不完全なネジ締付けを可及的に低減できて、一層確実にネジ締付けを行わしめるネジ締付け診断装置13になる。更に、このネジ締付け診断装置13を備えた電動ドライバ1を用いて製造される各種装置の信頼性の向上に寄与できることになる。
【0067】
また、ネジ締付け診断装置13は、電動ドライバ1と後述する管理装置9との間でデータを転送しあうためのデータ通信制御手段26を備え、電動ドライバ1に予め設定されるネジ種、ネジ長、ネジ締付け最小所要時間、ネジ締付け完了判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などのパラメータを管理装置9から受信し、また、ネジ締付け診断結果、詳細診断データ、例えば、検知した回転トルク、検知した押圧力、電動ドライバ1の駆動力の自己診断結果、更に予め設定されて保持しているパラメータ、例えば、設定したネジ種、ネジ長、ネジ締付け最小所定時間や所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などを管理装置9に送信し得る構成であると共に、電動ドライバ1の自己診断手段として駆動力劣化診断手段8を備えた構成である。
【0068】
この駆動力劣化診断手段8は、電動ドライバ1の電動機14を駆動する駆動電流及び電動機14の駆動回転数を検出する駆動電流検出手段7を備え、この駆動電流検出手段7が検出した駆動電流と駆動回転数とから電動機14の駆動トルクを算出すると共に、回転トルクセンサ部21で電動ドライバ1の回転軸に生ずる回転トルクを検知し、算出した駆動トルクと、回転トルクセンサ部21で検知した信号によって得られる回転トルクとを比較して電動ドライバ1の電動機14の駆動力の劣化や、回転トルクセンサ部21や押圧力センサ部22などのセンサ類の劣化などに起因する電動ドライバ1自身の診断を行える構成であり、電動ドライバ1に設けた設定部48で自己診断モードにすることで電動ドライバ1の自己診断を行えるようにしている。
【0069】
従って、電動機14の回転トルクの低下などによる駆動力の劣化判定を行って電動ドライバ1の自己診断が可能になり、ネジ締付け作業の信頼性の確認を速やかに確認できることになるため、電動ドライバ1自体は勿論、製造現場におけるネジ締付け作業の信頼性を確実に向上できることになる。
【0070】
また、ネジ締付け診断装置13は、ネジ締付け診断手段5で診断されたネジ締付け診断結果を通信制御手段26を介して管理装置9に通知すると共に、電動ドライバ1自体に設けたブザー鳴動音によって可聴し、若しくはランプ表示により視認して報知する報知部6を設けることで、ネジ締付け中にもネジ締付け診断結果をブザー鳴動させて可聴でき、またランプ表示で視認できるため、診断結果を直ちに認識でき効率的なネジ締付け作業を行えることになる。
【0071】
電動ドライバ1は、電動機14、減速機10及びクラッチ15を同軸状に配設して筒状の筐体16内に設ける共に、回転トルクを検知する回転トルクセンサ部21,押圧力を検知する押圧力センサ部22及び制御部18も筐体16内に設けたことで、電動ドライバ1内の回転トルク及び押圧力が発生する部位に近接した適切な箇所に設けることができ、回転トルク及び押圧力を直接、効果的に検出できて簡易な構成となる。
【0072】
制御部18は、MPU17、メモリ25、通信制御手段26、回転トルク検出手段、押圧力検出手段、ネジ締付開始判定手段27、ネジ締付け診断結果の報知手段6としてのブザーなどの鳴動部28やランプなどの表示部29、電動機14への給電を行う電動機駆動部30、電動機14の駆動電流及び駆動回転数を検出する駆動電流検出手段7などを構成する各種電子部品類を印刷配線基板上に搭載し、ネジ締付け診断装置13の機能をソフトウェアとして組み込み実装して、上記の回転トルクセンサ部21及び押圧力センサ部22の夫々の出力信号は、制御部18に設けられたネジ締付け診断装置13の回転トルク識別部3、押圧力識別部4で識別判定される構成である。
【0073】
また、電動機14はブラシレスモータを採用し、この電動機14の回転によって電動ドライバ1の先端に設けたドライバビット19を回転する構成であり、更にこの電動機14とドライッバビット19との間に、電動機14の回転速度を減速する遊星ギアからなる減速機10と、この減速機10とドライバビット19間の連結を遮断制御するクラッチ15とを設け、このクラッチ15にビットフォルダ47及びチャック24を介してドライバビット19を取り付ける構成である。
【0074】
また、クラッチ15は、ネジ締付時の回転トルクが予め設定した回転トルクに達すると電動機14や減速機10など駆動源の回転トルクの負荷側への伝達を遮断する構成であり、更に、ネジ締付開始スイッチ20及びトルククラッチリミットスイッチ32を付設して、電動ドライバ1をネジ2に押圧してネジ締付開始スイッチ20がオンすると電動機14が駆動し、予め設定した回転トルクになってクラッチ15が遮断動作するとトルククラッチリミットスイッチ32により電動機14の駆動を停止する構成である。
【0075】
また、この電動ドライバ1は、ネジ種、ネジ長、ネジ締付け最小所要時間、判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間のパラメータを一旦設定すると、管理装置9を接続しなくとも単独でもネジ締付け結果の診断を行うことが可能である。
【0076】
また、電動ドライバ1は、この電動ドライバ1で生ずる回転トルクが予め設定した遮断回転トルクに達すると電動ドライバ1の回転トルクの伝達を遮断するクラッチ15を備え、このクラッチ15に遮断回転トルクを予め設定する遮断トルク調整機構37を設け、予め設定した遮断回転トルクに固定した構成である。
【0077】
本実施例では更に、クラッチ15の遮断回転トルクを可変設定する遮断トルク調整機構37をパソコン12、若しくは管理装置9の設定部48から制御して、電動ドライバ1のクラッチ15の遮断回転トルクを遠隔設定し得る構成である。
【0078】
具体的には、このクラッチ15のトルク圧調整機構36に遮断トルク調整機構37を設けて、管理装置9若しくはパソコン12の設定部で遮断回転トルクを設定するとクラッチ15の遮断トルク値を予め設定した値に可変設定し得るように構成し、管理装置9若しくはパソコン12から電動ドライバ1に対してこの予め設定する遮断回転トルクを指示、転送することで、電動ドライバ1のクラッチ15のトルククラッチ圧力を調整して所定の遮断回転トルクでクラッチ15を遮断作動できるように構成している。
【0079】
詳細には、電動ドライバ1のクラッチ15は、電動機14及び減速機10などの駆動源側に結合する駆動部材38と、チャック24及びドライバビット19などの被駆動側に結合する被駆動部材39と、この駆動部材38と被駆動部材39との間にカム機構40を備え、更に被駆動部材39を駆動部材38に対して所定のバネ44の弾性力で押圧することでトルク圧を調整可能としたトルク圧調整機構36を備えて駆動源側と被駆動側との間を所定の回転トルクで遮断制御する構成である。
【0080】
更に詳細には、このクラッチ15のカム機構40をカム棒41と剛球42とこの剛球42を保持する溝43とで構成し、更に、被駆動部材39を駆動部材38に対して所定のバネ44の弾性力で押圧することでトルク圧を調整可能としたトルク圧調整機構36を備え、被駆動部材39を駆動部材38に押圧すると剛球42が溝43に係合して駆動部材38のトルクが被駆動部材39に伝達し、回転トルクがトルク圧調整機構36によって予め設定した所定遮断回転トルクに達すると、剛球42と溝43との係合が外れてトルク伝達が遮断制御する構成である。
【0081】
本実施例は、クラッチ15のトルク圧調整機構36を構成するバネ44の保持部の外周にレバーギア33を設けて遮断トルク調整機構37を構成し、このレバーギア33を電動ドライバ1の外面に設け、このレバーギア33を所定角度だけ回動するとバネ44が伸張し、このバネ44の弾性力を可変することで遮断回転トルクの調整及び設定が可能となる。
【0082】
また更に、電動ドライバ1の遮断回転トルクを設定するトルク調整用電動機35を備え、このトルク調整用電動機35を電動ドライバ1のレバーギア33に結合し、このトルク調整用電動機35を管理装置9からの指示で所定角度だけ回動することで電動ドライバ1の遮断回転トルクを適宜に変更設定し得るように構成している。
【0083】
このトルク調整用電動機35は、ステッピングモータ45の回転軸に調整ギア34を設け、この調整ギア34を電動ドライバ1のレバーギア33と係合させステッピングモータ45を所定角度回転させると、電動ドライバ1の遮断回転トルクを適宜の値に設定できる。
【0084】
また本実施例では、電動ドライバ1に内蔵される制御部18にこのステッピングモータ45へ印加するパルス信号を生成して回転角度を指示してクラッチ15の遮断回転トルクを設定する遮断回転トルク設定手段46を設け、管理装置9或いはパソコン12でこのトルク調整用電動機35に遮断回転トルクを指示し、この設定された遮断回転トルクを電動ドライバ1の制御部18に通知することで、電動ドライバ1のクラッチ15の遮断回転トルクを調整若しくは設定し得るように構成している。
【0085】
本実施例はこのように構成したので、管理装置9若しくはパソコン12から電動ドライバ1に対して、遮断回転トルクを指示、転送すると、制御部18に設けた通信制御手段26を介して遮断回転トルク設定手段46で遮断回転トルクに対応する回転角度が算出されてトルク調整用電動機35のステッピングモータ45がこの回転角度だけ回転すると、調整ギア34とレバーギア33で結合された遮断トルク調整機構37が回動し、トルク圧調整機構36に設けられたバネ44を変位させてトルク圧を調整することになって、電動ドライバ1のクラッチ15のトルククラッチ圧力を調整して所定の遮断回転トルクでクラッチ15を作動できることになる。
【0086】
従って、製造現場のネジ締付け工程で用いる電動ドライバ1のトルク設定を適宜行うことが可能になると共に、校正や調整などのトルク管理をも統一的に行うことが可能になって一層確実にネジ締付工程の運用管理を行える電動ドライバ及び電動ドライバ管理システムになる。
【0087】
管理装置9及びパソコン12は、ネジ締付け作業内容によって予め設定されるネジ種、ネジ長、ネジ締付け最小所要時間、ネジ締付け完了判定期間としての所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などの各種パラメータを設定部48で設定して、電動ドライバ1に内蔵されたネジ締付け診断装置13にこれらのパラメータを送信して遠隔設定させる他、電動ドライバ1でネジ2を締付けして診断した結果や、電動ドライバ1に保持させた各種パラメータや各種データを読み出して確認したり、電動ドライバ1から送達された各種データを蓄積、処理、表示して電動ドライバ1によるネジ締付け作業や工程を管理し得る構成である。
【0088】
以上のように電動ドライバ1と管理装置9とパソコン12とで構成した本実施例の電動ドライバ管理システム11は、パソコン12で、ネジ種、ネジ長、ネジ締付け最小所要時間、所定時間範囲、回転トルク、押圧力、この押圧力の維持時間などのパラメータを予め設定して、管理装置9を介して、電動ドライバ1にこれらの各種パラメータを転送してこの各種パラメータを電動ドライバ1に設定する。次いで、ネジ締付け作業を行うと、このネジ締付け作業の判定された結果をネジ締付けしながら、ランプやブザーなどの報知手段6によって直ちに診断結果を確認できると共に、管理装置9若しくはパソコン12に診断結果が送達される。また、ネジ締付け時の回転トルク及び押圧力、押圧力の維持時間、駆動電流、駆動回転数の測定データなどを時系列データとして送達することで、管理装置9若しくはパソコン12で、例えば、これらの時系列データからネジ締付け状態の経時変化及び各種統計解析を行ってネジ締付け工程の管理を行えることになる。
【0089】
本実施例の電動ドライバ管理システム11を用いて電動ドライバ1でネジ締付け作業を行った際の回転トルク及び押圧力の時間変化を模式的に現わすと図3のようになる。尚、この場合、M3×6mmのネジ2を用いたネジ締付けの最小所要時間を540ミリ秒とし、この最小所要時間から所定時間範囲にネジ締付け完了を判定するネジ締付け完了判定期間を設けている。
【0090】
この図3に示すように、ネジ締付け時にネジが空回りした場合、ネジがネジ山に食付いた所謂、ガジリ状態の場合、ネジ山不良の場合、ネジの頭ナメの場合などではネジ締付け時間が所定のネジ締付け完了判定期間ではネジ締付けは正常に行われないため、ネジ締付け診断結果も異常と診断され、また、本実施例ではネジ締付け完了判定期間にネジ締付けが行われるだけでなく、電動ドライバ1でネジ2を押圧した際、押圧力が所定量加えられていることを検出することで、正常なネジ締付けが行われたと診断している。
【0091】
即ち、電動ドライバ1でネジ2をネジ込む時には、図4のようにネジ2を押圧することによる推進力のあるネジ込み力が必要であるが、本実施例では、このネジ込み力を押圧方向成分である押圧力と、これと直交する成分である回転トルクとの双方を検出し、つまり、電動ドライバ1でネジ2を締付ける際の電動ドライバ1の回転軸に生ずる回転トルクだけでなく、電動ドライバ1でネジ2を押圧することで生ずる押圧力、特に、ネジ締付け完了時に最後の一締めとなる押圧力及びこの押圧力の維持時間を評価することでネジ締付けの品質を正確に評価、診断できることになる。
【0092】
本実施例は、ネジ締付けをネジ締付け完了が、予め設定される押圧力が予め設定される時期に行われたか否かを診断することで、ネジ締めの実態を正しく反映したネジ締付け診断装置13を内蔵した電動ドライバ1を実現し、その結果、例えば製造現場におけるネジ締付け作業状況を把握して管理できる電動ドライバ管理システム11になるだけでなく、この診断に沿うようにネジ締付け作業に習熟することで、極めて高い信頼性のネジ締め工程を実現できることになり、従って、この電動ドライバ1を用いて製造される各種装置の信頼性及び安全性を高めることができることになる。
【0093】
また、本実施例の電動ドライバ1は駆動力劣化診断手段8によって、所定の押圧力に対する電動機14の回転トルクを確認することで、電動ドライバ1のネジ締付け品質の確認を簡単に手軽に行うことが可能になり、電動ドライバ1の品質のみならず、製造現場における製造品質の維持に寄与できることになる。
【0094】
本実施例では、ネジ種、ネジ長、ネジ締付け最小所要時間を設定するようにしたが、ネジ締付け最小所要時間をネジ種、ネジ長から予め算出した値を設定する場合には、設定パラメータ数を削減できることになる。
【0095】
また、本実施例は、ネジ締付け完了判定期間を、締付けるネジ長に応じて予め設定されるネジ締付け最小所要時間から所定時間範囲に設定したが、締付けるネジ長に応じて予め設定されるネジ締付け最小所要時間以降適宜の時間をあけた後の所定時間範囲に設定する構成でもよく、この場合ネジ締付け完了判定期間の設定自由度を改善できることになる。
【0096】
また、本実施例は、ネジ締付け診断装置13を電動ドライバ1に組み込みソフトウェアとして実装したが、ネジ締付け診断装置13の機能を管理装置9に設けることでもよく、この場合、電動ドライバ1には、回転トルクセンサ部21及び押圧力センサ部22のみを設けておくだけよく電動ドライバ1を安価な構成とすることもできる。
【0097】
尚、本実施例のネジ締付け診断装置13をインパクト電動ドライバに対しても適用することが可能であり、また、各構成要件の具体的構成は適宜設計し得るものである。
【符号の説明】
【0098】
1 電動ドライバ
2 ネジ
4 押圧力識別部
5 ネジ締付け診断手段
6 報知手段
7 駆動電流検出手段
8 駆動力劣化診断手段
14 電動機
15 クラッチ
21 回転トルクセンサ部
22 押圧力センサ部
37 遮断トルク調整機構
48 設定部
【特許請求の範囲】
【請求項1】
電動ドライバを用いてネジの締付けを行った際のネジ締付け状態の診断を行うネジ締付け診断装置であって、前記電動ドライバの回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に前記電動ドライバで前記ネジを押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段とを備えたことを特徴とするネジ締付け診断装置。
【請求項2】
前記ネジ締付け診断手段は、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出した際、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成したことを特徴とする請求項1記載のネジ締付け診断装置。
【請求項3】
前記押圧力検出手段は、前記電動ドライバで前記ネジを押圧することで生ずる前記押圧力を検知する押圧力センサ部と、この押圧力センサ部で検知した前記押圧力が予め設定された押圧力に達したことを検出する押圧力識別部とからなることを特徴とする請求項1,2のいずれか1項に記載のネジ締付け診断装置。
【請求項4】
前記電動ドライバを備え、この電動ドライバに前記押圧力センサ部を設けたことを特徴とする請求項3記載のネジ締付け診断装置。
【請求項5】
前記回転トルク検出手段は、前記電動ドライバで前記ネジを回動することで生ずる前記回転トルクを検知する回転トルクセンサ部でなり、前記電動ドライバを備え、この電動ドライバに前記回転トルクセンサ部を設けたことを特徴とする請求項1〜4のいずれか1項に記載のネジ締付け診断装置。
【請求項6】
前記回転トルク検出手段に予め設定される前記ネジ締付け最小所要時間,前記所要時間範囲,前記回転トルク、並びに、前記押圧力検出手段に予め設定される前記押圧力を設定する設定部と、前記ネジ締付け診断手段で診断されたネジ締付け診断結果を報知する報知部とを備えたことを特徴とする請求項1〜5のいずれか1項に記載のネジ締付け診断装置。
【請求項7】
請求項1〜6のいずれか1項に記載のネジ締付け診断装置を具備したことを特徴とする電動ドライバ。
【請求項8】
前記電動ドライバの電動機を駆動する駆動電流及びこの電動機の駆動回転数を検出する駆動電流検出手段を備え、この駆動電流検出手段が検出した前記駆動電流と前記駆動回転数とから前記電動機の駆動トルクを算出すると共に、前記回転トルク検出手段に備えた回転トルクセンサ部で前記電動ドライバの回転軸の回転トルクを検知し、前記算出した駆動トルクと、前記回転トルクセンサ部で検知した回転トルクとを比較して前記電動ドライバの駆動力の劣化を診断する駆動力劣化診断手段を備えたことを特徴とする請求項7記載の電動ドライバ。
【請求項9】
前記電動ドライバに、この電動ドライバの回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると前記電動ドライバの回転トルクの伝達を遮断するクラッチを備え、このクラッチに、前記遮断回転トルクを可変設定する遮断トルク調整機構を設け、この遮断トルク調整機構の遮断回転トルクを遠隔操作により設定し得る設定部を備えたことを特徴とする請求項7,8のいずれか1項に記載の電動ドライバ。
【請求項1】
電動ドライバを用いてネジの締付けを行った際のネジ締付け状態の診断を行うネジ締付け診断装置であって、前記電動ドライバの回転軸に生ずる回転トルクが、締付けるネジ長に応じて予め設定されたネジ締付け最小所要時間以降の所定時間範囲内で予め設定された回転トルクに達したことを検出する回転トルク検出手段と、ネジ締付けの際に前記電動ドライバで前記ネジを押圧することで生ずる押圧力が予め設定された押圧力に達したことを検出する押圧力検出手段と、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出すると共に、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するネジ締付け診断手段とを備えたことを特徴とするネジ締付け診断装置。
【請求項2】
前記ネジ締付け診断手段は、前記回転トルク検出手段が前記最小所要時間以降の前記所定時間範囲内で前記予め設定された回転トルクに達したことを検出した際、前記押圧力検出手段が前記予め設定された押圧力を検出した場合には、ネジ締付けが正常に行われたと診断するように構成したことを特徴とする請求項1記載のネジ締付け診断装置。
【請求項3】
前記押圧力検出手段は、前記電動ドライバで前記ネジを押圧することで生ずる前記押圧力を検知する押圧力センサ部と、この押圧力センサ部で検知した前記押圧力が予め設定された押圧力に達したことを検出する押圧力識別部とからなることを特徴とする請求項1,2のいずれか1項に記載のネジ締付け診断装置。
【請求項4】
前記電動ドライバを備え、この電動ドライバに前記押圧力センサ部を設けたことを特徴とする請求項3記載のネジ締付け診断装置。
【請求項5】
前記回転トルク検出手段は、前記電動ドライバで前記ネジを回動することで生ずる前記回転トルクを検知する回転トルクセンサ部でなり、前記電動ドライバを備え、この電動ドライバに前記回転トルクセンサ部を設けたことを特徴とする請求項1〜4のいずれか1項に記載のネジ締付け診断装置。
【請求項6】
前記回転トルク検出手段に予め設定される前記ネジ締付け最小所要時間,前記所要時間範囲,前記回転トルク、並びに、前記押圧力検出手段に予め設定される前記押圧力を設定する設定部と、前記ネジ締付け診断手段で診断されたネジ締付け診断結果を報知する報知部とを備えたことを特徴とする請求項1〜5のいずれか1項に記載のネジ締付け診断装置。
【請求項7】
請求項1〜6のいずれか1項に記載のネジ締付け診断装置を具備したことを特徴とする電動ドライバ。
【請求項8】
前記電動ドライバの電動機を駆動する駆動電流及びこの電動機の駆動回転数を検出する駆動電流検出手段を備え、この駆動電流検出手段が検出した前記駆動電流と前記駆動回転数とから前記電動機の駆動トルクを算出すると共に、前記回転トルク検出手段に備えた回転トルクセンサ部で前記電動ドライバの回転軸の回転トルクを検知し、前記算出した駆動トルクと、前記回転トルクセンサ部で検知した回転トルクとを比較して前記電動ドライバの駆動力の劣化を診断する駆動力劣化診断手段を備えたことを特徴とする請求項7記載の電動ドライバ。
【請求項9】
前記電動ドライバに、この電動ドライバの回転軸で生ずる回転トルクが予め設定された遮断回転トルクに達すると前記電動ドライバの回転トルクの伝達を遮断するクラッチを備え、このクラッチに、前記遮断回転トルクを可変設定する遮断トルク調整機構を設け、この遮断トルク調整機構の遮断回転トルクを遠隔操作により設定し得る設定部を備えたことを特徴とする請求項7,8のいずれか1項に記載の電動ドライバ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−173233(P2011−173233A)
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願番号】特願2010−202952(P2010−202952)
【出願日】平成22年9月10日(2010.9.10)
【出願人】(598003900)有限会社井出計器 (3)
【Fターム(参考)】
【公開日】平成23年9月8日(2011.9.8)
【国際特許分類】
【出願日】平成22年9月10日(2010.9.10)
【出願人】(598003900)有限会社井出計器 (3)
【Fターム(参考)】
[ Back to top ]