
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数のレーダを制御し、目標を追尾するネットワークレーダシステムに関するものである。
【背景技術】
【0002】
航空機や飛翔体などの長距離に飛翔する目標の追尾に対して、少数のレーダでは、覆域(観測領域)に限界があるために、広範囲に設置された複数のレーダにより、目標の移動に伴い追尾を担当するレーダを切り替えながら観測するネットワークレーダシステムがある。従来、ネットワークレーダシステムのレーダ(センサ)割当には、複数の目標を期待する精度にて観測するため、レーダのリソース(目標の観測周期、及び1目標を観測するのに必要な時間から決定される。)の限界を考慮し、目標毎にレーダの効率的な追尾計画を決定し、制御する必要がある。この従来のレーダ(センサ)割当の手段では、レーダからの目標の探知状況などの観測結果に基づき目標軌道を推定し、満たすべき追尾精度要求を満足するように追尾レーダ割当計画を立案し、それに基づきレーダを計画的に制御するものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292533号公報(第1図〜第3図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来のネットワークレーダシステムのレーダ(センサ)割当には、目標に対する追尾レーダ割当計画を目標の予測軌道に基づいて行っているために、目標を追尾するレーダ群に、追尾レーダ割当計画にから、レーダの切り替えにより新たに参加したレーダが探知に失敗し、この失敗により、その時刻におけるレーダの割当が少ない場合は、結果的に、目標追尾が一時的に断絶する可能性があるという課題があった。
【0005】
この発明は、上記のような課題を解消するためになされたもので、追尾レーダ割当計画により新規に目標追尾を開始する予定のレーダのビーム照射テストを元に、より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ることを目的とする。
を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1の発明に係るネットワークレーダシステムは、それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備えたことを特徴とするものである。
【0007】
請求項2の発明に係るネットワークレーダシステムは、それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備え、前記追尾レーダ割当評価部のビーム照射テストは、S/N比の検出に加えてクラッター密度を検出し、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときであって、所定のクラッター密度未満のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせることを特徴するものである。
【0008】
請求項3の発明に係るネットワークレーダシステムは、前記目標が、複数の航空機や飛翔体であり、一目標ごとに前記追尾レーダ割当計画算出部が前記追尾レーダ割当計画を算出する請求項1又は2に記載のものである。
【0009】
請求項4の発明に係るネットワークレーダシステムは、前記複数のレーダのうち、少なくとも一つは移動体に搭載された移動体搭載レーダであり、前記移動体搭載レーダの移動により、前記追尾レーダ割当計画算出部が追尾レーダ割当計画を再算出する請求項1〜3のいずれかに記載のものである。
【0010】
請求項5の発明に係るネットワークレーダシステムは、前記追尾レーダ割当計画算出部が、複数の追尾レーダ割当計画を算出又は再算出し、そのうち優先度の高い追尾レーダ割当計画を前記レーダ制御部に報知するものである請求項1〜4のいずれかに記載のものである。
【発明の効果】
【0011】
以上のように、この発明によれば、追尾している目標の移動状況から追尾レーダ割当計画に基づいて、目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要がある場合に、事前に切替先レーダが有する探知テスト部を制御し、ビーム照射テストを実行させて、その結果に基づいて、レーダの切り替えや追尾レーダ割当計画の再算出を行うので、信頼性の高い、目標の追尾を行うことが可能なネットワークレーダシステムを得ることができる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態に係るネットワークレーダシステムの構成を示すブロック図である。
【図2】この発明の実施の形態に係るネットワークレーダシステムによる追尾レーダ割当計画評価フローチャートである。
【図3】この発明の実施の形態に係るネットワークレーダシステムによる追尾レーダ割当評価期間と観測可能期間との関係を示す図である。
【発明を実施するための形態】
【0013】
実施の形態1.
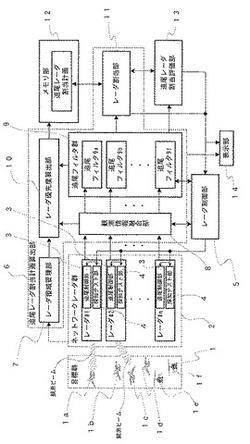
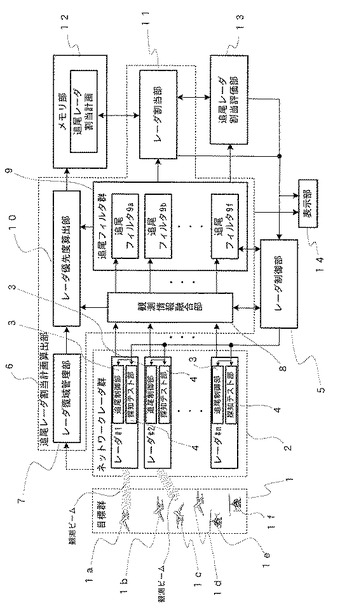
以下、この発明の実施の形態1について図1〜3を用いて説明する。図1は実施の形態1に係るネットワークレーダシステムの構成を示すブロック図、図2は実施の形態1に係るネットワークレーダシステムによる追尾レーダ割当計画評価フローチャート、図3は実施の形態1に係るネットワークレーダシステムによる追尾レーダ割当評価期間と観測可能期間との関係を示す図であり、図3の横軸tは時刻を指す。図1において、1はネットワークレーダシステムにより追尾する対象である航空機や飛翔体などの目標1a〜1fからなる目標群であり、例示的に六つの目標を図示している。追尾可能な目標の数に関しては後述する。2は目標群1に対して探知及び追尾を行うために観測ビームを放射する広範囲の各地点に亘り設置されたレーダ#1〜#n(nは零を除く自然数)からなり、レーダ#1〜#nのそれぞれの覆域を統合的に使用可能なネットワークレーダ群であり、図1において、レーダ#1〜#nは模式的に集合して図示されているが、実際は前述の通り、広範囲の各地点に亘り設置されるものである。もちろん、艦船、航空機、車両などの移動体に搭載された移動体搭載レーダでも構わない。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0014】
図1において、3はレーダ#1〜#nに、それぞれ設けられた追尾制御部であり、後述のレーダ制御部5から指示された位置に対して、目標探知を試み、探知に成功した場合は、レーダ制御部4から追尾中止を指示されるまで目標追尾を継続するものである。4はレーダ#1〜#nに、それぞれ設けられた探知テスト部、5は複数のレーダ#1〜#nの追尾制御部3をそれぞれ制御し、複数のレーダ#1〜#nの覆域に存在する航空機や飛翔体などの目標1a〜1fを追尾させるレーダ制御部、6は複数のレーダ#1〜#nの覆域や前記目標の探知状況から算出した目標1a〜1fの予測軌道により、複数のレーダ#1〜#nの中から目標1a〜1fの追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出(立案)し、レーダ制御部5に報知する追尾レーダ割当計画算出部である。なお、ネットワークレーダ群2は、有線又は無線のネットワークを介してレーダ制御部5及び追尾レーダ割当計画算出部6と接続されている。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0015】
図1において、追尾レーダ割当計画算出部6は、レーダ#1〜#nの覆域を管理するレーダ覆域管理部7、レーダ#1〜#nが行っている目標1a〜1fの探知及び追尾により得られる観測情報を統合する観測情報融合部8、複数の追尾フィルタ#1〜#nからなる追尾フィルタ群9、割り当てるレーダの優先度を算出するレーダ優先度算出部10、レーダを割り当てるレーダ割当部11で構成されている。追尾フィルタ群9は、追尾フィルタ#1〜#nの数だけの目標を追尾できるものである。ここで、レーダ覆域管理部7は、レーダ#1〜#nの観測ビーム状況や環境の変化により、変化するレーダ#1〜#nの覆域を管理するものである。このレーダ#1〜#nの覆域の変化を適宜反映することより、後述の追尾レーダ割当計画算出部6により算出(再算出)する追尾レーダ割当計画の精度を高めればよい。また、レーダ#1〜#nのうち、少なくとも一つは、艦船、航空機、車両などの移動体に搭載された移動体搭載レーダである場合は、移動体搭載レーダの移動により、の観測ビーム状況や環境の変化に加えて、移動体搭載レーダの覆域自体も移動するので、これを反映させることにより、追尾レーダ割当計画の精度をより高めることができる。さらに、移動体が存在又は移動している場所の地図・地形、海図、天候情報も、レーダ覆域管理部7で管理することにより、追尾レーダ割当計画の精度を高めてもよい。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0016】
追尾レーダ割当計画算出部6において、追尾フィルタ9a〜9fにそれぞれ対応する目標1a〜1fの観測情報を観測情報融合部8から受けると、目標9a〜9fの位置と速度の推定・予測を実行し、その情報を目標1a〜1fの予測軌道として観測情報を更新する。次に、レーダ優先度算出部10は、レーダ覆域管理部7からのレーダ覆域情報,観測情報融合部8からの観測情報,追尾フィルタ群9からの情報が入力され、レーダ#1〜#nと目標1a〜1fとの位置関係などを用いて、目標1a〜1fの追尾を行うレーダ若しくはレーダ群の優先度を算出する。
【0017】
そして、レーダ優先度算出部10が出力する目標1a〜1fの追尾を行うレーダ若しくはレーダ群の優先度は追尾レーダ割当計画として出力され、メモリ部12に保存される。レーダ割当部11は、メモリ部12からの追尾レーダ割当計画や追尾フィルタ群9が出力する情報とからレーダ割当を決定し、レーダ制御部5に報知する。この報知に基づいてレーダ制御部5はレーダ#1〜#nを制御して目標1a〜1fを追尾する。レーダ割当部11は最終的に決定したレーダの割り当てを追尾レーダ割当計画としてもよい。なお、メモリ部12は、追尾レーダ割当計画算出部6の内部に形成してもよいし、図1のように追尾レーダ割当計画算出部6の外部に形成してもよい。また、別途メモリ部12を設けずに、レーダ優先度算出部6などの他の構成要素中にメモリ部12に相当するものを設けてもよい。
【0018】
図1において、13はレーダ割当部11又はメモリ部12が保存している追尾レーダ割当計画を評価する追尾レーダ割当評価部、14は追尾レーダ割当評価部12の評価結果、追尾レーダ割当計画算出部6の算出結果、目標1a〜1fの探知状況や追尾状況などを表示する表示部である。なお、追尾フィルタ群9を使用した追尾レーダ割当計画算出部6による追尾レーダ割当計画の算出方法は、一例であって、観測状況やレーダの配置によって重み付けを行う要素が異なるので、別の方法で算出してもよい。
【0019】
次に、追尾レーダ割当評価部13の動作を説明する。なお、説明を明瞭にするために、追尾対象である目標が目標1aのみの場合を想定して説明を進めるが、本願に係るネットワークレーダシステムは、複数の目標に対しても適用可能なものである。つまり、複数の目標に対して、それぞれ追尾レーダ割当計画を立案して処理を行えばよい。言い換えると、一目標ごとに追尾レーダ割当計画算出部6が追尾レーダ割当計画を算出することになる。また、同時に追尾できる目標の数は、ハードウェア資源やソフトウェア資源による制限は受けるが、本願の本質に直接的には影響しない。なお、追尾レーダ割当評価部13による追尾レーダ割当計画の評価とは追尾レーダ割当計画により、切替先レーダとして挙げられるレーダの探知テストを行い、切替先レーダに切り替えても目標追尾に影響を当てないことを調べることを指す。
【0020】
目標1aの移動状況から追尾レーダ割当計画に基づいて、目標1aの追尾に割り当てられているレーダを、このレーダと別の切替先レーダに切り替える必要があるとき、言い換えると、目標1aの移動により、目標1aを追尾しているレーダの覆域から脱してしまいそうになっているとき、目標1aの追尾に割り当てられているレーダと切替先レーダとの覆域が離れている場合、レーダ制御部5を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部5に目標1aを追尾するレーダを切替先レーダに切り替えさせ、テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した目標1aの予測軌道から追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出(再立案)させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。以上の処理を目標追尾の状況に応じて繰り返し行うことにより、目標追尾が一時的に断絶する可能性を減じたネットワークレーダシステムが得られる。
【0021】
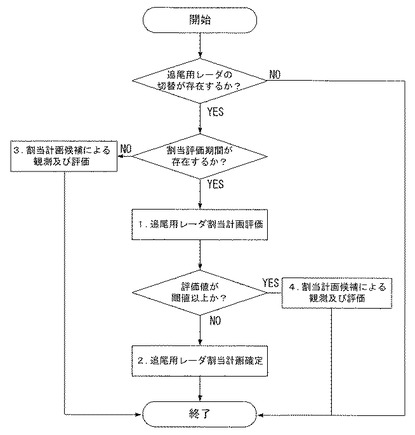
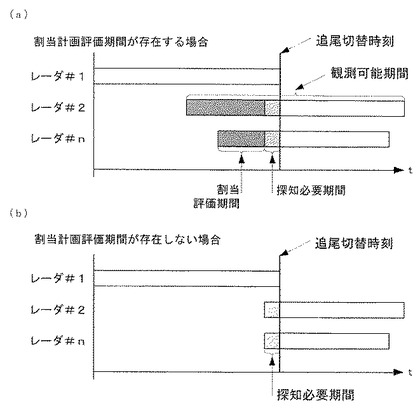
具体的な追尾レーダ割当計画の再立案処理に関して、図2及び3、式1及び2を用いて説明する。追尾レーダ割当計画算出部6による追尾レーダ割当計画の立案時(図2)に、現在追尾中の目標1aの航跡について、追尾レーダ割当計画上、追尾用レーダの切り替えが起こっているか確認する。切り替えが発生していない場合は、レーダを制御する必要がないので、本処理を終了、現状の追尾レーダ割当計画を確定とする。切り替えが発生している場合は、割当評価期間が存在するか確認する。割当評価期間とは、図3(a)に示すように、追尾切り替え後、担当するレーダにおける観測可能期間の追尾切り替え時刻以前の期間から、探知必要期間を除いた期間である。つまり、割当評価期間とは、追尾切り替え前後のレーダ同士の覆域が重複していないか、割当評価期間が実質的に生じる程度に離れている場合に発生する。
【0022】
割当評価期間が存在する場合は、追尾レーダ割当計画評価を行う(図2の1)。追尾割当レーダ割当評価部13は、次に追尾を開始するレーダの探知テスト部4に対して、目標1aの予測存在位置に対して、レーダ制御部5を通して、ビーム照射テストを指示する。探知テスト部2は、ビーム照射を行い、ビーム照射テストによる目標1a情報が追尾レーダ割当計画算出部6又は追尾割当レーダ割当評価部13を通して、追尾レーダ割当評価部13に伝達する。追尾レーダ割当評価部13は、このビーム照射テストによる目標1a情報を元に以下の式1及び2の計算により、評価値γの算出を行う。
【0023】
【数1】

【0024】
【数2】
【0025】
評価値γが閾値以上の場合は、現状の追尾レーダ割当計画案7を確定させる(図2の2)。評価値γが閾値未満の場合は、追尾レーダ割当計画を破棄し、追尾レーダ割当計画の再算出を、当該レーダを除いて、追尾レーダ割当計画算出部6に行わせる。割当評価期間が存在しない場合(図3(b))は、追尾レーダ割当計画からレーダの候補による観測及び評価(図2の3)として、目標1aの観測(探知)可能な全てのレーダに対して、レーダ制御部5を通して追尾開始を指示する。全てのレーダの追尾結果が揃ったところで、目標情報より評価値γを算出し、もっとも評価値が高いレーダを追尾用レーダとし、残りのレーダに対しては、レーダ制御部5を通して追尾中止を指示する。このように処理することで、追尾用レーダの切り替えが発生する場合において、信頼性の高い目標追尾が継続できるネットワークレーダシステムが得られる。
【0026】
実施の形態2.
実施の形態1では、目標ごとに追尾レーダ割当計画が1つしかないことを想定したが、追尾レーダ割当評価部13による信頼度算出を行うことにより、追尾レーダ割当計画が複数ある場合に、より信頼度の高い追尾レーダ割当計画案を選択する手段として利用することも可能である。また、追尾レーダ割当評価部13の評価により、追尾レーダ割当計画算出部6が、複数の追尾レーダ割当計画を再算出(再評価)し、そのうち優先度の高い追尾レーダ割当計画をレーダ制御部5に報知するようにしてもよい。
【0027】
実施の形態3.
実施の形態1及び2では、探知テスト部2からの目標1a情報をビーム照射テスト時刻での目標情報、S/Nとしたが、探知テスト部2の取得情報量を増やすことにより、追尾レーダ割当評価部8の信頼度計算の精度を上げることができる。一例としては、ビーム照射テスト部2にて、追尾切替時刻での予測位置に対して、ビーム照射を行うことにより、現時点でのクラッター密度を算出し、信頼度算出に含めることで、真目標を探知する確からしさの影響を考慮することが出来る。
【0028】
つまり、目標1aの移動状況から追尾レーダ割当計画に基づいて、目標1aの追尾に割り当てられているレーダを、このレーダと別の切替先レーダに切り替える必要があるとき、言い換えると、目標1aの移動により、目標1aを追尾しているレーダの覆域から脱してしまいそうになっているとき、目標1aの追尾に割り当てられているレーダと切替先レーダとの覆域が離れている場合、レーダ制御部5を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した目標1aの予測軌道から追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出(再立案)させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。
【0029】
一方、テストの結果、S/N比が所定の閾値以上のときは、ビーム照射テストの結果、所定のクラッター密度未満のときは、レーダ制御部5に目標1aを追尾するレーダを切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した予測軌道から目標1aの追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。以上の処理を目標追尾の状況に応じて繰り返し行うことにより、目標追尾が一時的に断絶する可能性を減じ、さらに真目標を探知する確からしさの影響を考慮するネットワークレーダシステムが得られる。
【0030】
このように、本願に係るネットワークレーダシステムにおいては、各レーダを制御するレーダ制御部、このレーダ制御部の制御情報となる目標ごとの追尾レーダ割当計画を立案、決定する追尾レーダ割当計画算出部、追尾レーダ割当計画を評価し、必要であれば、追尾レーダ割当計画を再計画する追尾レーダ割当計画評価部によるビーム照射テストを行う探知テスト部を制御する前記レーダ制御部を備えたので、新規に目標追尾を開始する予定のレーダのビーム照射テストを元に、追尾レーダ割当計画を再算出することにより、信頼性の高い、目標追尾を行うことが可能である。
【符号の説明】
【0031】
1・・目標群 2・・ネットワークレーダ群、3・・追尾制御部、4・・探知テスト部、
5・・レーダ制御部、6・・追尾レーダ割当計画算出部、7・・レーダ覆域管理部、
8・・観測情報融合部、9・・追尾フィルタ群、10・・レーダ優先度算出部、
11・・レーダ割当部、12・・メモリ部、13・・追尾レーダ割当評価部、
14・・表示部。
【技術分野】
【0001】
この発明は、複数のレーダを制御し、目標を追尾するネットワークレーダシステムに関するものである。
【背景技術】
【0002】
航空機や飛翔体などの長距離に飛翔する目標の追尾に対して、少数のレーダでは、覆域(観測領域)に限界があるために、広範囲に設置された複数のレーダにより、目標の移動に伴い追尾を担当するレーダを切り替えながら観測するネットワークレーダシステムがある。従来、ネットワークレーダシステムのレーダ(センサ)割当には、複数の目標を期待する精度にて観測するため、レーダのリソース(目標の観測周期、及び1目標を観測するのに必要な時間から決定される。)の限界を考慮し、目標毎にレーダの効率的な追尾計画を決定し、制御する必要がある。この従来のレーダ(センサ)割当の手段では、レーダからの目標の探知状況などの観測結果に基づき目標軌道を推定し、満たすべき追尾精度要求を満足するように追尾レーダ割当計画を立案し、それに基づきレーダを計画的に制御するものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292533号公報(第1図〜第3図)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、従来のネットワークレーダシステムのレーダ(センサ)割当には、目標に対する追尾レーダ割当計画を目標の予測軌道に基づいて行っているために、目標を追尾するレーダ群に、追尾レーダ割当計画にから、レーダの切り替えにより新たに参加したレーダが探知に失敗し、この失敗により、その時刻におけるレーダの割当が少ない場合は、結果的に、目標追尾が一時的に断絶する可能性があるという課題があった。
【0005】
この発明は、上記のような課題を解消するためになされたもので、追尾レーダ割当計画により新規に目標追尾を開始する予定のレーダのビーム照射テストを元に、より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ることを目的とする。
を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1の発明に係るネットワークレーダシステムは、それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備えたことを特徴とするものである。
【0007】
請求項2の発明に係るネットワークレーダシステムは、それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備え、前記追尾レーダ割当評価部のビーム照射テストは、S/N比の検出に加えてクラッター密度を検出し、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときであって、所定のクラッター密度未満のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせることを特徴するものである。
【0008】
請求項3の発明に係るネットワークレーダシステムは、前記目標が、複数の航空機や飛翔体であり、一目標ごとに前記追尾レーダ割当計画算出部が前記追尾レーダ割当計画を算出する請求項1又は2に記載のものである。
【0009】
請求項4の発明に係るネットワークレーダシステムは、前記複数のレーダのうち、少なくとも一つは移動体に搭載された移動体搭載レーダであり、前記移動体搭載レーダの移動により、前記追尾レーダ割当計画算出部が追尾レーダ割当計画を再算出する請求項1〜3のいずれかに記載のものである。
【0010】
請求項5の発明に係るネットワークレーダシステムは、前記追尾レーダ割当計画算出部が、複数の追尾レーダ割当計画を算出又は再算出し、そのうち優先度の高い追尾レーダ割当計画を前記レーダ制御部に報知するものである請求項1〜4のいずれかに記載のものである。
【発明の効果】
【0011】
以上のように、この発明によれば、追尾している目標の移動状況から追尾レーダ割当計画に基づいて、目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要がある場合に、事前に切替先レーダが有する探知テスト部を制御し、ビーム照射テストを実行させて、その結果に基づいて、レーダの切り替えや追尾レーダ割当計画の再算出を行うので、信頼性の高い、目標の追尾を行うことが可能なネットワークレーダシステムを得ることができる。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態に係るネットワークレーダシステムの構成を示すブロック図である。
【図2】この発明の実施の形態に係るネットワークレーダシステムによる追尾レーダ割当計画評価フローチャートである。
【図3】この発明の実施の形態に係るネットワークレーダシステムによる追尾レーダ割当評価期間と観測可能期間との関係を示す図である。
【発明を実施するための形態】
【0013】
実施の形態1.
以下、この発明の実施の形態1について図1〜3を用いて説明する。図1は実施の形態1に係るネットワークレーダシステムの構成を示すブロック図、図2は実施の形態1に係るネットワークレーダシステムによる追尾レーダ割当計画評価フローチャート、図3は実施の形態1に係るネットワークレーダシステムによる追尾レーダ割当評価期間と観測可能期間との関係を示す図であり、図3の横軸tは時刻を指す。図1において、1はネットワークレーダシステムにより追尾する対象である航空機や飛翔体などの目標1a〜1fからなる目標群であり、例示的に六つの目標を図示している。追尾可能な目標の数に関しては後述する。2は目標群1に対して探知及び追尾を行うために観測ビームを放射する広範囲の各地点に亘り設置されたレーダ#1〜#n(nは零を除く自然数)からなり、レーダ#1〜#nのそれぞれの覆域を統合的に使用可能なネットワークレーダ群であり、図1において、レーダ#1〜#nは模式的に集合して図示されているが、実際は前述の通り、広範囲の各地点に亘り設置されるものである。もちろん、艦船、航空機、車両などの移動体に搭載された移動体搭載レーダでも構わない。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0014】
図1において、3はレーダ#1〜#nに、それぞれ設けられた追尾制御部であり、後述のレーダ制御部5から指示された位置に対して、目標探知を試み、探知に成功した場合は、レーダ制御部4から追尾中止を指示されるまで目標追尾を継続するものである。4はレーダ#1〜#nに、それぞれ設けられた探知テスト部、5は複数のレーダ#1〜#nの追尾制御部3をそれぞれ制御し、複数のレーダ#1〜#nの覆域に存在する航空機や飛翔体などの目標1a〜1fを追尾させるレーダ制御部、6は複数のレーダ#1〜#nの覆域や前記目標の探知状況から算出した目標1a〜1fの予測軌道により、複数のレーダ#1〜#nの中から目標1a〜1fの追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出(立案)し、レーダ制御部5に報知する追尾レーダ割当計画算出部である。なお、ネットワークレーダ群2は、有線又は無線のネットワークを介してレーダ制御部5及び追尾レーダ割当計画算出部6と接続されている。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0015】
図1において、追尾レーダ割当計画算出部6は、レーダ#1〜#nの覆域を管理するレーダ覆域管理部7、レーダ#1〜#nが行っている目標1a〜1fの探知及び追尾により得られる観測情報を統合する観測情報融合部8、複数の追尾フィルタ#1〜#nからなる追尾フィルタ群9、割り当てるレーダの優先度を算出するレーダ優先度算出部10、レーダを割り当てるレーダ割当部11で構成されている。追尾フィルタ群9は、追尾フィルタ#1〜#nの数だけの目標を追尾できるものである。ここで、レーダ覆域管理部7は、レーダ#1〜#nの観測ビーム状況や環境の変化により、変化するレーダ#1〜#nの覆域を管理するものである。このレーダ#1〜#nの覆域の変化を適宜反映することより、後述の追尾レーダ割当計画算出部6により算出(再算出)する追尾レーダ割当計画の精度を高めればよい。また、レーダ#1〜#nのうち、少なくとも一つは、艦船、航空機、車両などの移動体に搭載された移動体搭載レーダである場合は、移動体搭載レーダの移動により、の観測ビーム状況や環境の変化に加えて、移動体搭載レーダの覆域自体も移動するので、これを反映させることにより、追尾レーダ割当計画の精度をより高めることができる。さらに、移動体が存在又は移動している場所の地図・地形、海図、天候情報も、レーダ覆域管理部7で管理することにより、追尾レーダ割当計画の精度を高めてもよい。図中、同一符号は、同一又は相当部分を示しそれらについての詳細な説明は省略する。
【0016】
追尾レーダ割当計画算出部6において、追尾フィルタ9a〜9fにそれぞれ対応する目標1a〜1fの観測情報を観測情報融合部8から受けると、目標9a〜9fの位置と速度の推定・予測を実行し、その情報を目標1a〜1fの予測軌道として観測情報を更新する。次に、レーダ優先度算出部10は、レーダ覆域管理部7からのレーダ覆域情報,観測情報融合部8からの観測情報,追尾フィルタ群9からの情報が入力され、レーダ#1〜#nと目標1a〜1fとの位置関係などを用いて、目標1a〜1fの追尾を行うレーダ若しくはレーダ群の優先度を算出する。
【0017】
そして、レーダ優先度算出部10が出力する目標1a〜1fの追尾を行うレーダ若しくはレーダ群の優先度は追尾レーダ割当計画として出力され、メモリ部12に保存される。レーダ割当部11は、メモリ部12からの追尾レーダ割当計画や追尾フィルタ群9が出力する情報とからレーダ割当を決定し、レーダ制御部5に報知する。この報知に基づいてレーダ制御部5はレーダ#1〜#nを制御して目標1a〜1fを追尾する。レーダ割当部11は最終的に決定したレーダの割り当てを追尾レーダ割当計画としてもよい。なお、メモリ部12は、追尾レーダ割当計画算出部6の内部に形成してもよいし、図1のように追尾レーダ割当計画算出部6の外部に形成してもよい。また、別途メモリ部12を設けずに、レーダ優先度算出部6などの他の構成要素中にメモリ部12に相当するものを設けてもよい。
【0018】
図1において、13はレーダ割当部11又はメモリ部12が保存している追尾レーダ割当計画を評価する追尾レーダ割当評価部、14は追尾レーダ割当評価部12の評価結果、追尾レーダ割当計画算出部6の算出結果、目標1a〜1fの探知状況や追尾状況などを表示する表示部である。なお、追尾フィルタ群9を使用した追尾レーダ割当計画算出部6による追尾レーダ割当計画の算出方法は、一例であって、観測状況やレーダの配置によって重み付けを行う要素が異なるので、別の方法で算出してもよい。
【0019】
次に、追尾レーダ割当評価部13の動作を説明する。なお、説明を明瞭にするために、追尾対象である目標が目標1aのみの場合を想定して説明を進めるが、本願に係るネットワークレーダシステムは、複数の目標に対しても適用可能なものである。つまり、複数の目標に対して、それぞれ追尾レーダ割当計画を立案して処理を行えばよい。言い換えると、一目標ごとに追尾レーダ割当計画算出部6が追尾レーダ割当計画を算出することになる。また、同時に追尾できる目標の数は、ハードウェア資源やソフトウェア資源による制限は受けるが、本願の本質に直接的には影響しない。なお、追尾レーダ割当評価部13による追尾レーダ割当計画の評価とは追尾レーダ割当計画により、切替先レーダとして挙げられるレーダの探知テストを行い、切替先レーダに切り替えても目標追尾に影響を当てないことを調べることを指す。
【0020】
目標1aの移動状況から追尾レーダ割当計画に基づいて、目標1aの追尾に割り当てられているレーダを、このレーダと別の切替先レーダに切り替える必要があるとき、言い換えると、目標1aの移動により、目標1aを追尾しているレーダの覆域から脱してしまいそうになっているとき、目標1aの追尾に割り当てられているレーダと切替先レーダとの覆域が離れている場合、レーダ制御部5を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部5に目標1aを追尾するレーダを切替先レーダに切り替えさせ、テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した目標1aの予測軌道から追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出(再立案)させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。以上の処理を目標追尾の状況に応じて繰り返し行うことにより、目標追尾が一時的に断絶する可能性を減じたネットワークレーダシステムが得られる。
【0021】
具体的な追尾レーダ割当計画の再立案処理に関して、図2及び3、式1及び2を用いて説明する。追尾レーダ割当計画算出部6による追尾レーダ割当計画の立案時(図2)に、現在追尾中の目標1aの航跡について、追尾レーダ割当計画上、追尾用レーダの切り替えが起こっているか確認する。切り替えが発生していない場合は、レーダを制御する必要がないので、本処理を終了、現状の追尾レーダ割当計画を確定とする。切り替えが発生している場合は、割当評価期間が存在するか確認する。割当評価期間とは、図3(a)に示すように、追尾切り替え後、担当するレーダにおける観測可能期間の追尾切り替え時刻以前の期間から、探知必要期間を除いた期間である。つまり、割当評価期間とは、追尾切り替え前後のレーダ同士の覆域が重複していないか、割当評価期間が実質的に生じる程度に離れている場合に発生する。
【0022】
割当評価期間が存在する場合は、追尾レーダ割当計画評価を行う(図2の1)。追尾割当レーダ割当評価部13は、次に追尾を開始するレーダの探知テスト部4に対して、目標1aの予測存在位置に対して、レーダ制御部5を通して、ビーム照射テストを指示する。探知テスト部2は、ビーム照射を行い、ビーム照射テストによる目標1a情報が追尾レーダ割当計画算出部6又は追尾割当レーダ割当評価部13を通して、追尾レーダ割当評価部13に伝達する。追尾レーダ割当評価部13は、このビーム照射テストによる目標1a情報を元に以下の式1及び2の計算により、評価値γの算出を行う。
【0023】
【数1】
【0024】
【数2】
【0025】
評価値γが閾値以上の場合は、現状の追尾レーダ割当計画案7を確定させる(図2の2)。評価値γが閾値未満の場合は、追尾レーダ割当計画を破棄し、追尾レーダ割当計画の再算出を、当該レーダを除いて、追尾レーダ割当計画算出部6に行わせる。割当評価期間が存在しない場合(図3(b))は、追尾レーダ割当計画からレーダの候補による観測及び評価(図2の3)として、目標1aの観測(探知)可能な全てのレーダに対して、レーダ制御部5を通して追尾開始を指示する。全てのレーダの追尾結果が揃ったところで、目標情報より評価値γを算出し、もっとも評価値が高いレーダを追尾用レーダとし、残りのレーダに対しては、レーダ制御部5を通して追尾中止を指示する。このように処理することで、追尾用レーダの切り替えが発生する場合において、信頼性の高い目標追尾が継続できるネットワークレーダシステムが得られる。
【0026】
実施の形態2.
実施の形態1では、目標ごとに追尾レーダ割当計画が1つしかないことを想定したが、追尾レーダ割当評価部13による信頼度算出を行うことにより、追尾レーダ割当計画が複数ある場合に、より信頼度の高い追尾レーダ割当計画案を選択する手段として利用することも可能である。また、追尾レーダ割当評価部13の評価により、追尾レーダ割当計画算出部6が、複数の追尾レーダ割当計画を再算出(再評価)し、そのうち優先度の高い追尾レーダ割当計画をレーダ制御部5に報知するようにしてもよい。
【0027】
実施の形態3.
実施の形態1及び2では、探知テスト部2からの目標1a情報をビーム照射テスト時刻での目標情報、S/Nとしたが、探知テスト部2の取得情報量を増やすことにより、追尾レーダ割当評価部8の信頼度計算の精度を上げることができる。一例としては、ビーム照射テスト部2にて、追尾切替時刻での予測位置に対して、ビーム照射を行うことにより、現時点でのクラッター密度を算出し、信頼度算出に含めることで、真目標を探知する確からしさの影響を考慮することが出来る。
【0028】
つまり、目標1aの移動状況から追尾レーダ割当計画に基づいて、目標1aの追尾に割り当てられているレーダを、このレーダと別の切替先レーダに切り替える必要があるとき、言い換えると、目標1aの移動により、目標1aを追尾しているレーダの覆域から脱してしまいそうになっているとき、目標1aの追尾に割り当てられているレーダと切替先レーダとの覆域が離れている場合、レーダ制御部5を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した目標1aの予測軌道から追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出(再立案)させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。
【0029】
一方、テストの結果、S/N比が所定の閾値以上のときは、ビーム照射テストの結果、所定のクラッター密度未満のときは、レーダ制御部5に目標1aを追尾するレーダを切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、切替先レーダを除く複数のレーダ#1〜#nの覆域や目標1aの探知状況から算出した予測軌道から目標1aの追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部6に再算出させ、レーダ制御部5に目標1aを追尾するレーダを新たな切替先レーダに切り替えさせる。以上の処理を目標追尾の状況に応じて繰り返し行うことにより、目標追尾が一時的に断絶する可能性を減じ、さらに真目標を探知する確からしさの影響を考慮するネットワークレーダシステムが得られる。
【0030】
このように、本願に係るネットワークレーダシステムにおいては、各レーダを制御するレーダ制御部、このレーダ制御部の制御情報となる目標ごとの追尾レーダ割当計画を立案、決定する追尾レーダ割当計画算出部、追尾レーダ割当計画を評価し、必要であれば、追尾レーダ割当計画を再計画する追尾レーダ割当計画評価部によるビーム照射テストを行う探知テスト部を制御する前記レーダ制御部を備えたので、新規に目標追尾を開始する予定のレーダのビーム照射テストを元に、追尾レーダ割当計画を再算出することにより、信頼性の高い、目標追尾を行うことが可能である。
【符号の説明】
【0031】
1・・目標群 2・・ネットワークレーダ群、3・・追尾制御部、4・・探知テスト部、
5・・レーダ制御部、6・・追尾レーダ割当計画算出部、7・・レーダ覆域管理部、
8・・観測情報融合部、9・・追尾フィルタ群、10・・レーダ優先度算出部、
11・・レーダ割当部、12・・メモリ部、13・・追尾レーダ割当評価部、
14・・表示部。
【特許請求の範囲】
【請求項1】
それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備えたネットワークレーダシステム。
【請求項2】
それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備え、前記追尾レーダ割当評価部のビーム照射テストは、S/N比の検出に加えてクラッター密度を検出し、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときであって、所定のクラッター密度未満のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせることを特徴するネットワークレーダシステム。
【請求項3】
前記目標は、複数の航空機や飛翔体であり、一目標ごとに前記追尾レーダ割当計画算出部が前記追尾レーダ割当計画を算出する請求項1又は2に記載のネットワークレーダシステム。
【請求項4】
前記複数のレーダのうち、少なくとも一つは移動体に搭載された移動体搭載レーダであり、前記移動体搭載レーダの移動により、前記追尾レーダ割当計画算出部が追尾レーダ割当計画を再算出する請求項1〜3のいずれかに記載のネットワークレーダシステム。
【請求項5】
前記追尾レーダ割当計画算出部は、複数の追尾レーダ割当計画を算出又は再算出し、そのうち優先度の高い追尾レーダ割当計画を前記レーダ制御部に報知するものである請求項1〜4のいずれかに記載のネットワークレーダシステム。
【請求項1】
それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備えたネットワークレーダシステム。
【請求項2】
それぞれ追尾制御部及び探知テスト部を有する複数のレーダと、この複数のレーダを繋ぐ有線又は無線のネットワークと、このネットワークを介して前記複数のレーダの追尾制御部をそれぞれ制御し、前記複数のレーダの覆域に存在する航空機や飛翔体などの目標を追尾させるレーダ制御部と、前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道により、前記複数のレーダの中から前記目標の追尾を実行させるレーダを割り当てる追尾レーダ割当計画を算出し、前記レーダ制御部に報知する追尾レーダ割当計画算出部と、前記目標の移動状況から前記追尾レーダ割当計画に基づいて、前記目標の追尾に割り当てられているレーダを別の切替先レーダに切り替える必要があるときであって、前記目標の追尾に割り当てられているレーダと前記別の切替先レーダとの覆域が離れている場合、前記レーダ制御部を介して前記切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、前記ビーム照射テストの結果、S/N比が所定の閾値未満のときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせる追尾レーダ割当評価部とを備え、前記追尾レーダ割当評価部のビーム照射テストは、S/N比の検出に加えてクラッター密度を検出し、前記ビーム照射テストの結果、S/N比が所定の閾値以上のときであって、所定のクラッター密度未満のときは、前記レーダ制御部に前記目標を追尾するレーダを前記切替先レーダに切り替えさせ、所定のクラッター密度以上ときは、前記切替先レーダを除く前記複数のレーダの覆域や前記目標の探知状況から算出した前記目標の予測軌道から前記目標の追尾を実行させる新たな切替先レーダを割り当てるため、前記追尾レーダ割当計画を前記追尾レーダ割当計画算出部に再算出させ、前記レーダ制御部に前記目標を追尾するレーダを前記新たな切替先レーダに切り替えさせることを特徴するネットワークレーダシステム。
【請求項3】
前記目標は、複数の航空機や飛翔体であり、一目標ごとに前記追尾レーダ割当計画算出部が前記追尾レーダ割当計画を算出する請求項1又は2に記載のネットワークレーダシステム。
【請求項4】
前記複数のレーダのうち、少なくとも一つは移動体に搭載された移動体搭載レーダであり、前記移動体搭載レーダの移動により、前記追尾レーダ割当計画算出部が追尾レーダ割当計画を再算出する請求項1〜3のいずれかに記載のネットワークレーダシステム。
【請求項5】
前記追尾レーダ割当計画算出部は、複数の追尾レーダ割当計画を算出又は再算出し、そのうち優先度の高い追尾レーダ割当計画を前記レーダ制御部に報知するものである請求項1〜4のいずれかに記載のネットワークレーダシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−164320(P2010−164320A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−4518(P2009−4518)
【出願日】平成21年1月13日(2009.1.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月13日(2009.1.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]