
ネットワーク化された波形システム
ある実施形態では、環境内の異なる地理的位置に配置された複数のレーダを含むネットワーク化された波形システムを提供する。複数のレーダは、ネットワーク波形信号を送信するように構成され得る。ネットワーク波形信号は複数のレーダ波形信号を含む。複数の波形信号のそれぞれは複数のレーダのうちの特定のレーダにより送信され得る。システムはプロセッサ及びメモリを有する、複数のレーダと一体となったコンピュータシステムを含む。メモリは、複数のレーダから受信したデータ、プロセッサにより処理されたデータ、及びプロセッサによって実行可能な処理コードを含む情報を格納するように構成される。処理コードは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令と、ネットワーク波形信号に基づいて、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する命令と、を含んでよい。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、概してレーダに関する。特に本出願は、レーダ測定結果の曖昧性を解決するための方法、システム及びデバイスに関する。
【背景技術】
【0002】
気象レーダシステムの基本的な目的の1つは、竜巻のような異常な気象現象の定量的な測定を行うために、地球周囲の大気をサンプリングすることにある。しかしながら、一様なパルス繰り返し周波数(pulse repetition frequency)のパルス波を送信するモノスタティック(monostatic)ドップラーレーダは、パルス繰り返し周波数及びレーダ波長に基づいて一義的に決まる、最大距離及び最大速度における限界に直面している。ある波長に固定された場合、上述した一義的な最大距離及び最大速度はトレードオフな関係を有しうる。このトレードオフな関係は、Xバンドレーダのような短波長レーダにおけるものより厳しくさえあるだろう。
【0003】
従って、レーダ測定結果の曖昧性を解決するための、稼働しているレーダ装置の改良方法、及びシステムに関する技術分野において、一般的な需要がある。
【発明の概要】
【課題を解決するための手段】
【0004】
レーダ測定結果の曖昧性を解決するためのネットワーク化された波形システムは、1つの実施形態により提供される。ネットワーク化された波形システムは、環境内の異なる地理的位置に配置された複数のレーダを含みうる。複数のレーダは、ネットワーク化されたレーダシステムの一部であってよい。複数のレーダは、ネットワーク波形信号を送信するように構成されてよい。ネットワーク波形信号は、複数のレーダ波形信号を含みうる。複数の波形信号のそれぞれは、複数のレーダのうちの特定のレーダにより送信されてよい。システムはまた、プロセッサ及びメモリを有し、複数のレーダと一体となったコンピュータシステムを含みうる。メモリは、複数のレーダから受信したデータ、プロセッサにより処理されたデータ、及びプロセッサによって実行可能な処理コードを含む情報を格納するように構成され得る。処理コードは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令と、ネットワーク波形信号に基づいて、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する命令と、を含みうる。
【0005】
レーダ測定結果の曖昧性を解決する方法も提供される。方法は、環境内の異なる位置に配置された複数のレーダから、複数のレーダ波形信号を送信する工程を含む。方法はまた、送信された複数のレーダ波形信号の結果として得られる出力データを、複数のレーダから受信する工程を含む。出力データの少なくとも1つのサブセットがエイリアスされ得る。方法はまた、複数のレーダからの出力データを統合処理する工程を含む。方法は、処理された出力データから、エイリアスのない、環境の測定結果を判定する工程を含む。
【0006】
ネットワーク化されたレーダシステムも提供される。ネットワーク化されたレーダシステムは、複数のレーダからネットワーク波形信号を送信する送信手段を含む。ネットワーク波形信号は複数のレーダ波形信号を含みうる。ネットワーク化されたレーダシステムはまた、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する受信手段を含む。ネットワーク化されたレーダシステムは、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する処理手段を含む。
【0007】
ドップラーレーダの測定方法も提供される。ドップラーレーダの測定方法は、複数のレーダからのレーダデータを用いて、少なくとも毎秒100m/sの速度を判定する工程を含む。複数のレーダのそれぞれは、100m/s未満の速度の測定をサポート可能なレーダデータを提供するように構成される。
【0008】
特許または出願書類は、少なくとも1つの有色で作成された図を含む。有色の図面を有する本特許または特許出願公開の複製は、要求とともに必要な手数料を支払うことで、局より提供されるであろう。
【0009】
添付の図面において、同様の要素及び機構の少なくともいずれかは同一の数字の参照ラベルを有しうる。さらに、同じタイプの様々な要素は、当該同様の要素及び機構の少なくともいずれかを識別する文字を参照ラベルの後に付すことにより区別されうる。明細書において最初の数字の参照ラベルのみが用いられた場合、当該記載は、添え字に関わらず、同一の最初の数字の参照ラベルを有する同様のコンポーネント及び機構の少なくともいずれかの全てに適用可能であるものとする。
【図面の簡単な説明】
【0010】
【図1】様々な実施形態に係るレーダシステムを示す。
【図2】様々な実施形態に係るレーダシステムを示す。
【図3】様々な実施形態に係るレーダシステムを示す。
【図4】様々な実施形態に係る、環境の測定結果を判定するためのフローチャートを示す。
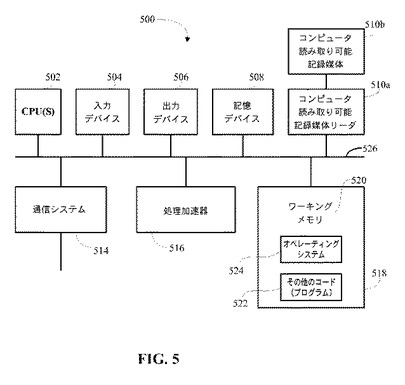
【図5】以下に記載された実施形態の様々な態様を計算するために用いられうる計算システムのブロック図を示す。
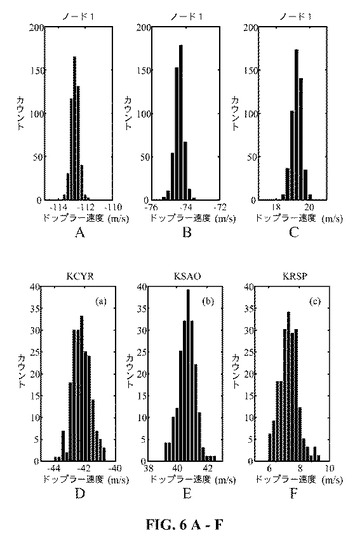
【図6】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションに基づく、シミュレートされたドップラー速度を示す。
【図7A】、
【図7B】、
【図7C】、
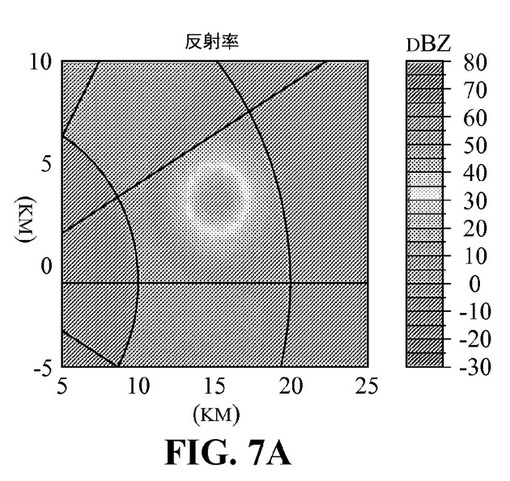
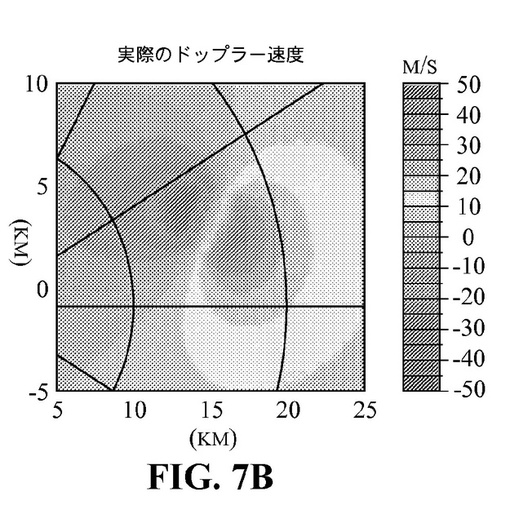
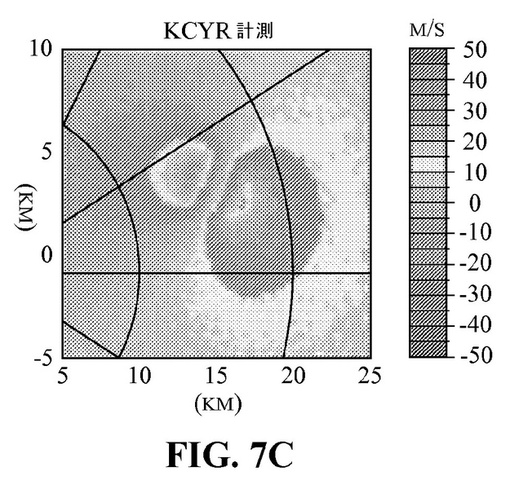
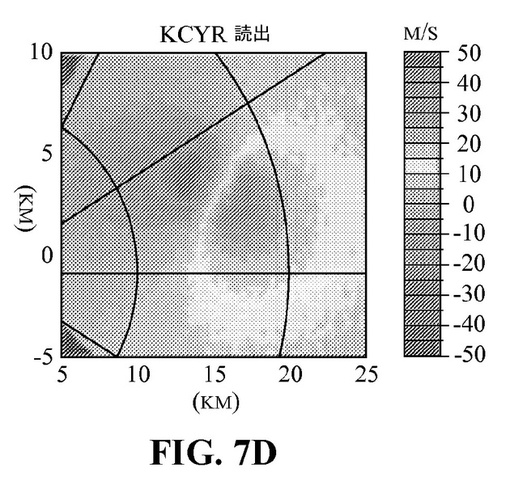
【図7D】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションに基づく、竜巻の循環特性についてのシミュレーション結果を示す。
【図8A】、
【図8B】、
【図8C】、
【図8D】、
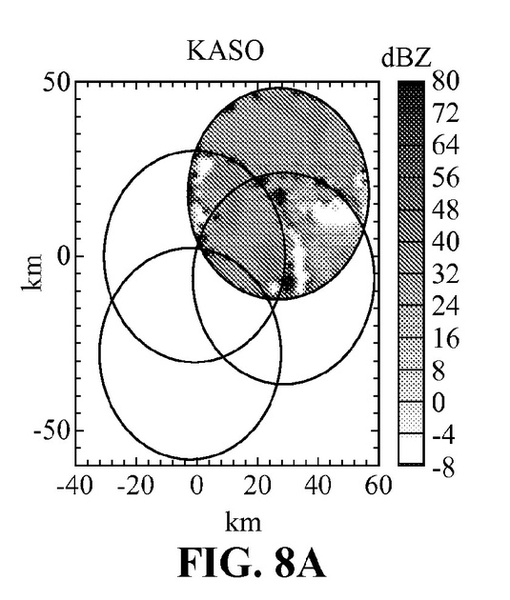
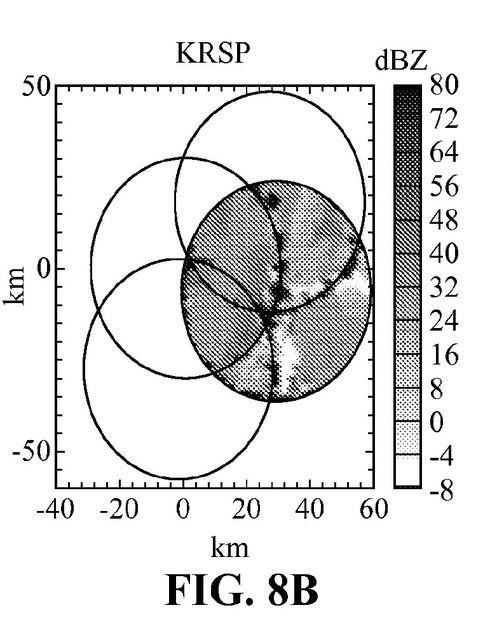
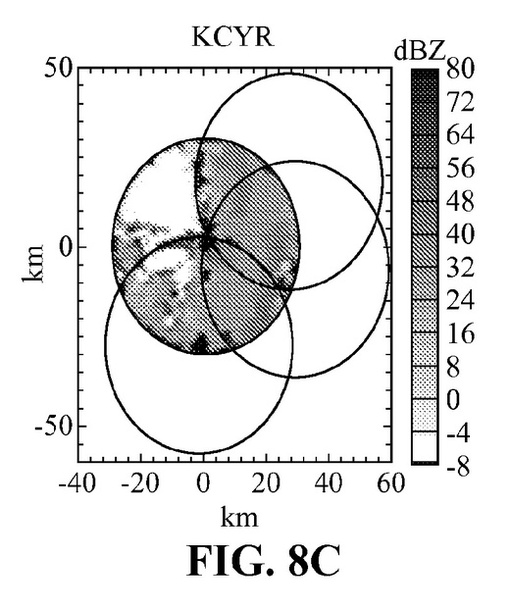
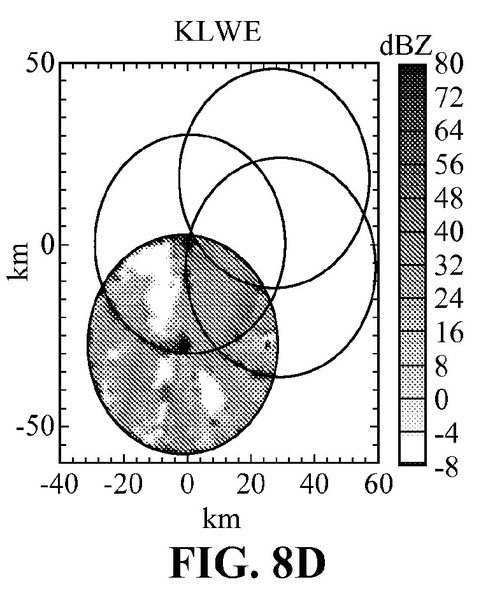
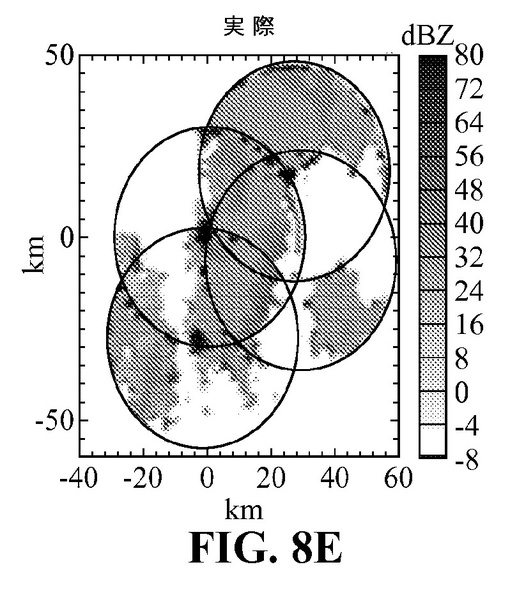
【図8E】様々な実施形態に係る、ネットワーク化された波形システムで用いられうる、短距離レーダをシミュレートするためのSバンドレーダによって観測された実際の反射率を示す。
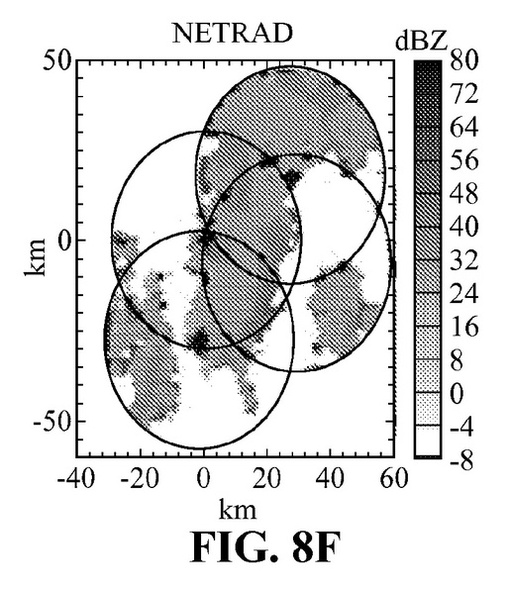
【図8F】図8A乃至Eにおける、観測された反射率に基づく、ネットワーク波形信号から得られた反射率を示している。
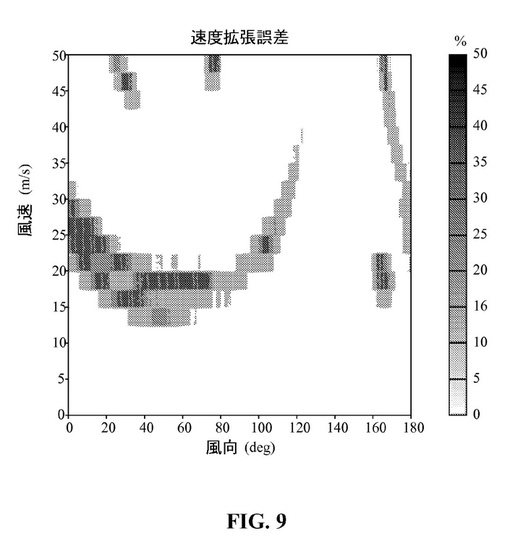
【図9】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションのための風速及び風向の関数として、速度拡張誤差を示す。
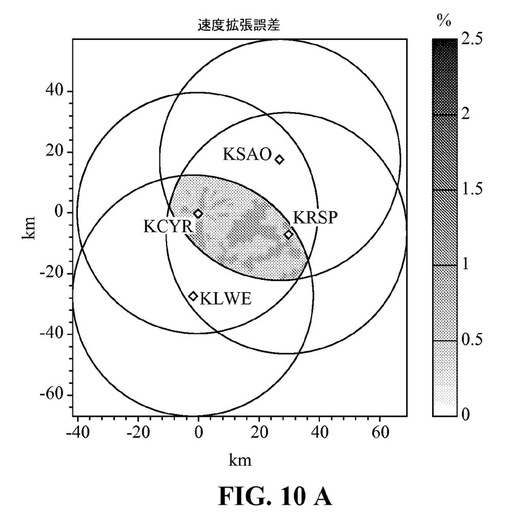
【図10A】、
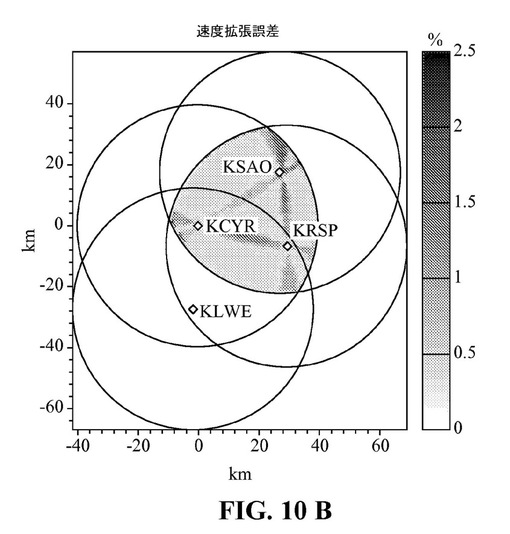
【図10B】様々な実施形態に係る、それぞれがネットワーク波形信号を用いた、3または4のノードシステムのシミュレーションについての、速度拡張誤差を示す。
【図11A】、
【図11B】、
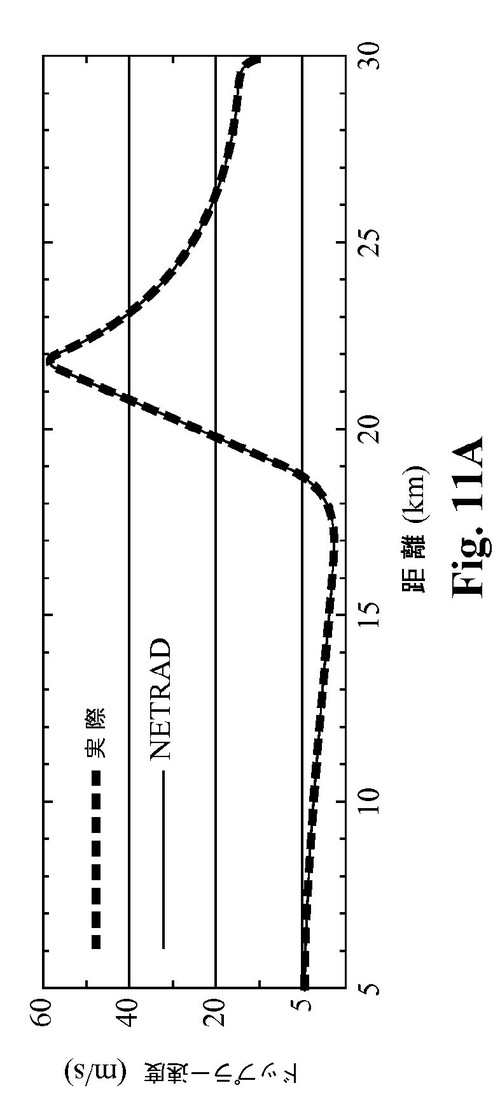
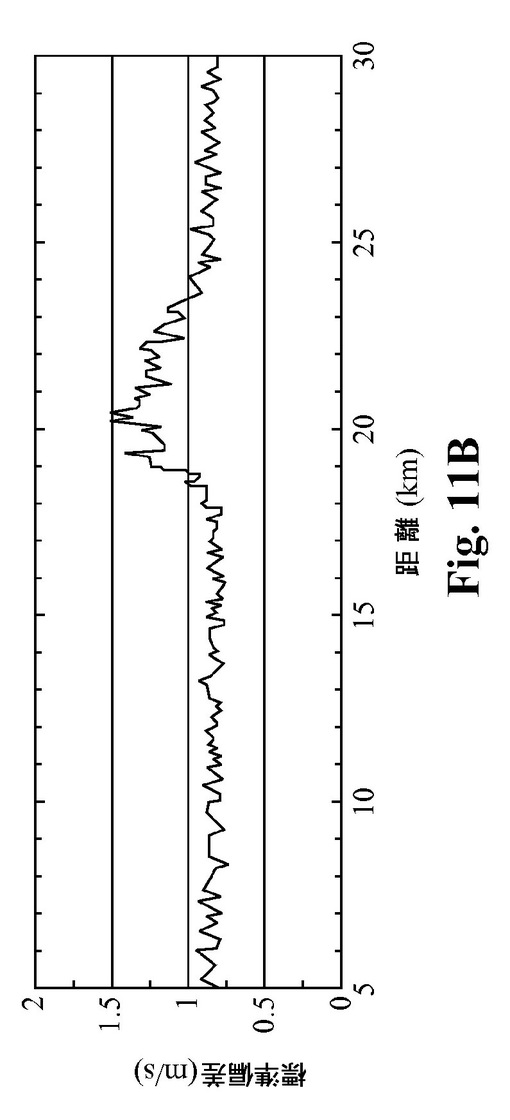
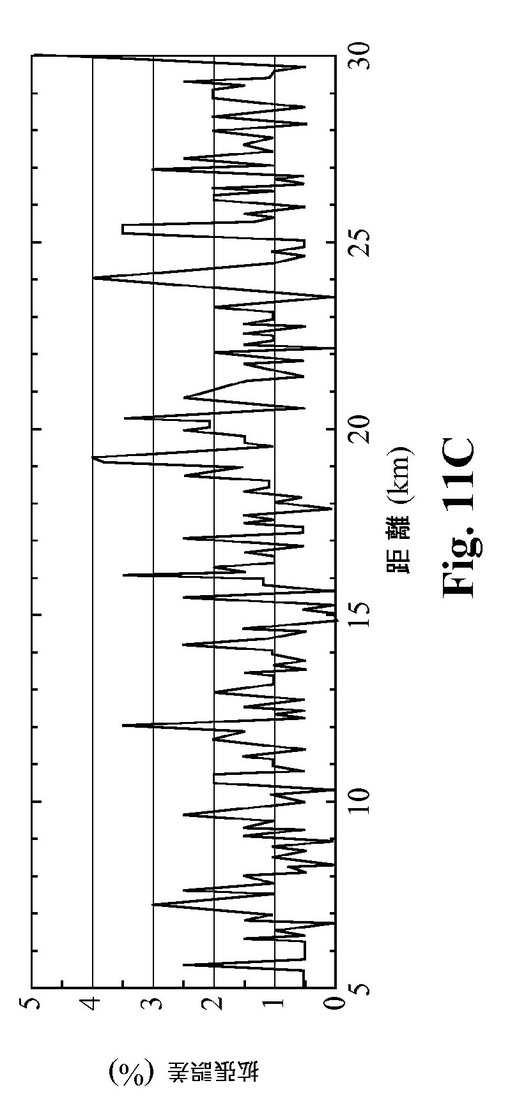
【図11C】様々な実施形態に係る、ネットワーク波形信号シミュレーションについての、測定された速度、標準偏差、及び拡張誤差を示す。
【図12A】、
【図12B】、
【図12C】、
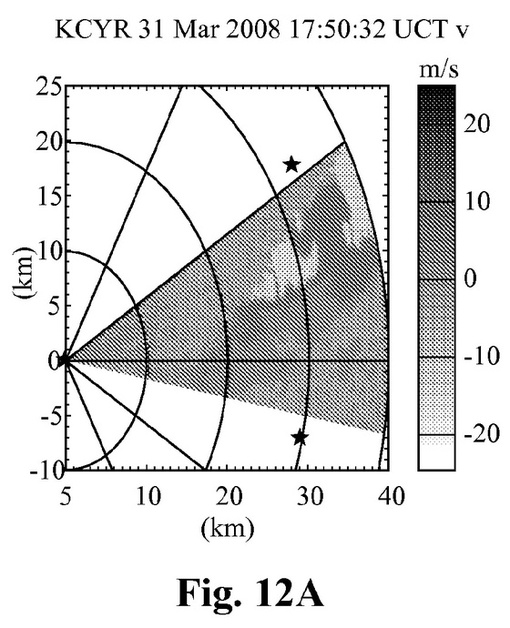
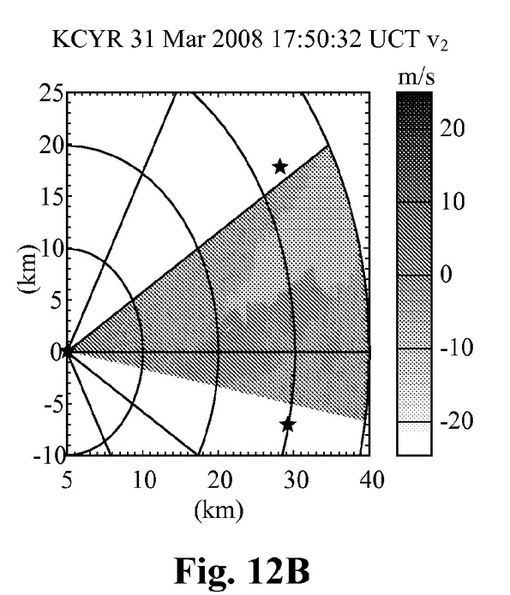
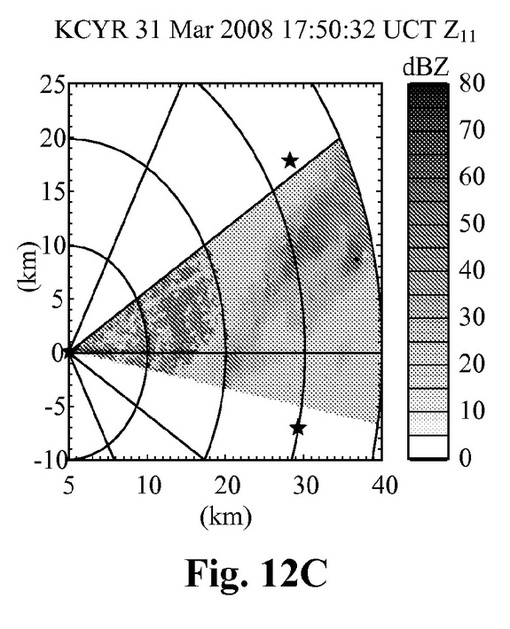
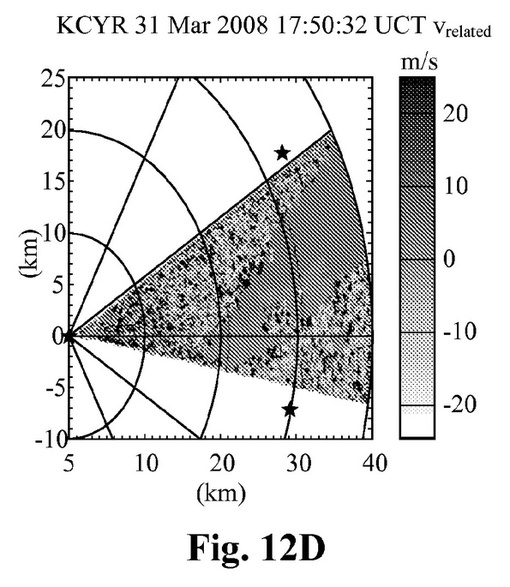
【図12D】様々な実施形態に係る、2008年3月31日の降水事象に関するネットワーク化/分布された波形信号について読み出された速度に加え、反射率及び速度観測を示す。
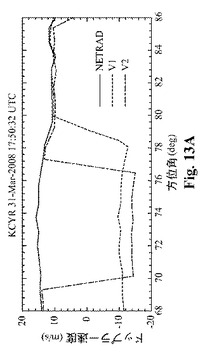
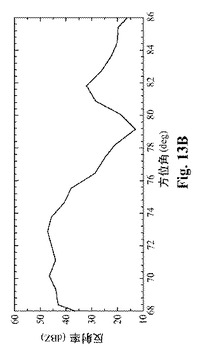
【図13A】、
【図13B】様々な実施形態に係る、2008年3月31日の降水事象に関するネットワーク読み出しを用いて測定されたドップラー速度及び反射率を示す。
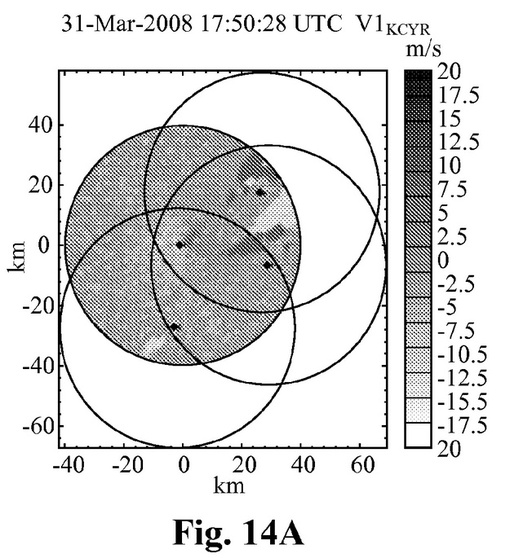
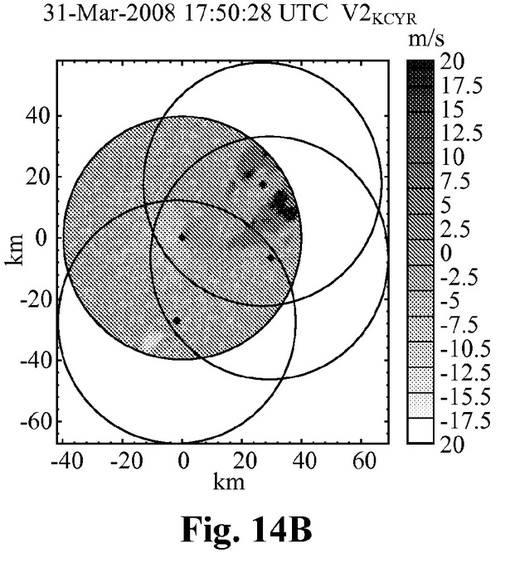
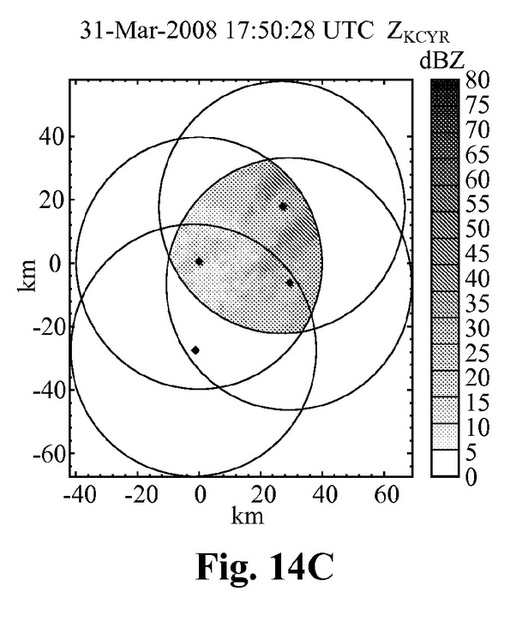
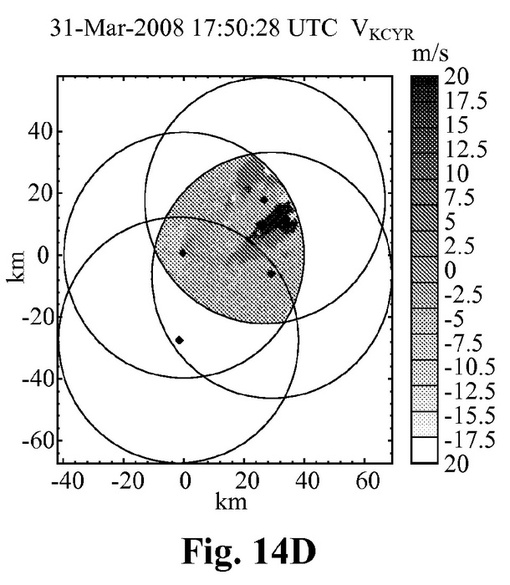
【図14A】、
【図14B】、
【図14C】、
【図14D】様々な実施形態に係る、2008年3月31日の降水事象のネットワーク/分布された波形信号について読み出された速度に加えて、別の反射率及び速度観測を示す。
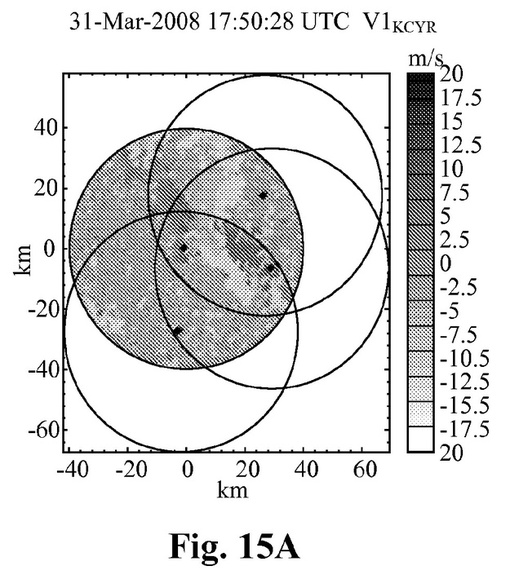
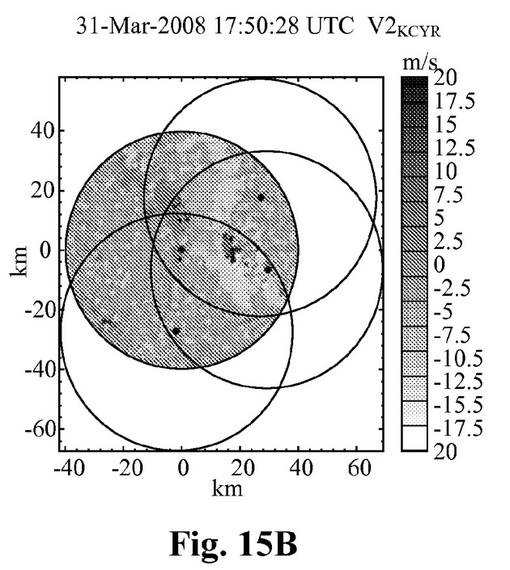
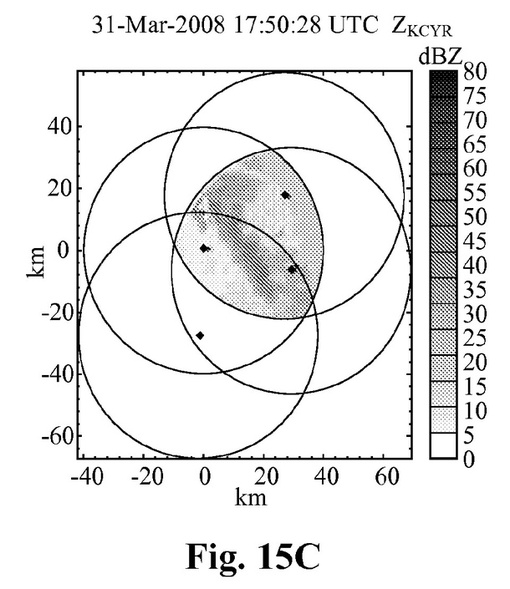
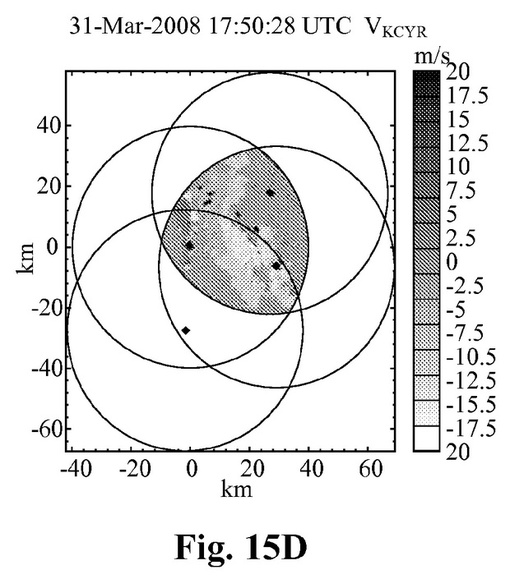
【図15A】、
【図15B】、
【図15C】、
【図15D】様々な実施形態に係る、2008年6月17日の降水事象のネットワーク/分布された波形信号について読み出された速度に加えて、別の反射率及び速度観測を示す。
【発明を実施するための形態】
【0011】
一様なパルス繰り返し周波数(「PRF」:pulse repetition frequency)を用いて送信を行うモノスタティックドップラーレーダは、パルス繰り返し周波数(「PRF」)及び波長(「λ」)により一義的に決まる、最大距離(「ra」)及び最大速度(「va」)における限界に直面しうる。一義的な最大距離raは、次のような式を用いて決定されるであろう。
【0012】
【数1】
cは光速である。PRFは、パルス繰り返し時間(「PRT」:pulse repetition time)と相互に関連するかもしれない。一義的に決まる最大速度は次のような式を用いて決定されるだろう。
【0013】
【数2】
【0014】
vaはナイキスト速度として参照されてもよい。va及びraの間には、次のような式により表されるように、任意の波長において積が一定となるような、相反するトレードオフが存在しうる。
【0015】
【数3】
【0016】
このことは、大抵レンジ・ドップラージレンマ(range-Doppler dilemma)と呼ばれる結果を生じる。一義的な長距離の測定を実現するために選択されたPRFは、一義的な高い速度の測定を実現するためには良くない選択となるであろう。
【0017】
単一のドップラーレーダを用いる、レンジ・ドップラージレンマを部分的に回避するためのいくつかの公知の方法があるが、当該方法はレーダにおいてより高度な装置を伴いうる。さらに、これらの方法の使用はドップラージレンマの回避に役立つが、他の問題を解決しない。例えば、高い速度の測定結果(即ち、60m/s以上、あるいは100m/sに相当する)が、高周波数における送信に要求されうる。これは、より高価な装置を一般的に必要とする。
【0018】
故に、距離と速度の曖昧性の問題を解決可能な方法、システム及びデバイスが必要である。特に、一義的な距離測定を維持し、既存の低コストのレーダデバイスも使用しながら、高い速度を測定可能なシステムが必要である。
【0019】
故に、特定の実施形態では、距離と速度の曖昧性の解決において、高い速度の測定を可能としつつ、単一パルスドップラーレーダの制限を打開する手段及び技術を提供する。実施形態は、反射率及び速度の少なくともいずれかのような、降水媒体の潜在的な固有特性がネットワーク環境において一定である原理を使用しうる、ネットワーク化された波形システム(networked waveform system)を含む。距離及び速度における曖昧性は、複数のレーダからのデータを交えて環境の正確な測定を行うために、ネットワーク上の複数のレーダからの測定結果を統合処理することによって解決されるであろう。
【0020】
ネットワーク化された波形システムは、以下を含む多くの利点を提供しうる。しかしながら、波形システムの利点は、以下に限定されない。1つ目は、距離及び速度の曖昧性が単一のレーダの波形信号において連結されているのに対し、距離の曖昧性及び速度の曖昧性を互いに分離しうることである。2つ目は、ネットワーク波形信号(または分散型波形信号)は、100m/sを超える速度を含む、60m/sを上回る速度を測定するために設計されうることである。いくつかの実施形態では、ネットワーク波形信号は、複合波形信号、及び互いのノードにおける高度な処理を必要とせずに設計される。このことは、それぞれのノードにおける計算負荷を最小化しうる。3つ目は、ネットワーク波形信号は、複合波形信号を有する非常に高価な単一レーダシステムに対抗するように、複合波形信号をサポートするために限られた能力を有し得る、低コストの送信機が用いられてもよいことである。4つ目は、ネットワーク化された波形システムは、ネットワークにおける個々のレーダノードの制限により限定されることなく、カバー領域において特定の要求を満たすように設計されてもよいことである。5つ目は、ネットワーク波形信号は、暴風雨構造の運動学的解析に用いられうる、エイリアスのない(dealiased)風系場の推定を導出することを可能にするかもしれないことである。
【0021】
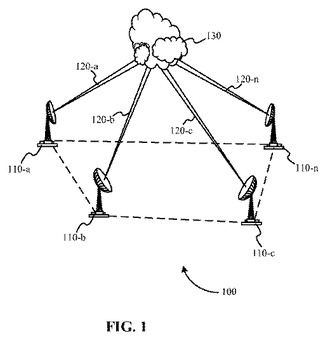
実施形態に係るネットワーク化された波形システム100の基本的な構造は、図1に示される。当該図において、及び以下に示された記載の大半において、ネットワーク化された波形システムは、複数のレーダ110−a、110−b、・・・、110−nを有する。システム100は、例えば、4つのレーダ110−a、110−b、110−c、及び110−nを示す。特定の数のレーダを用いて示された図は、例示的な目的で提供されたものであり、限定を目的としたものではない。任意の複数のレーダを有するシステムについて、以下に記載された方法及びシステムを拡張する方法は、本技術分野に属する当業者にとっては明確であろう。
【0022】
システム100は、複数のレーダ110がそれぞれ、異なる地理的位置に位置する異なるレーダ110によるレゾリューションボリューム(resolution volume)130において、同一の事象についての実質的な同時観測がなされるように、ビーム120−a、120−b、・・・、120−nを生成可能であることを示している。例えば、視線速度はそれぞれのビーム120の経路において、それぞれのレーダ110により測定されうる。それぞれのレーダ110によりなされる測定は、それぞれのレーダ110がそれぞれのビーム120の方向において測定するため、異なるものと考えられる。さらに、環境における1つの位置における測定結果は、ビーム120の経路上の異なる点について、実質的に関連しているデータを含みうる。また、速度の測定結果において、レーダ110の一義的な最大速度よりも高い速度が測定結果に内包される(folded)、あるいはエイリアスされる場合、測定結果にはエイリアシングが生じる。しかしながら、個々のビーム120の測定結果が異なる値であるにも関わらず、ベクトル速度のような実際のパラメータあるいは固有パラメータは、任意の点、あるいは空間のレゾリューションボリュームという点で同一となるであろう。ネットワーク化された波形システムは、速度のような環境の潜在的な固有パラメータがネットワーク環境において一定である原理を用いる。反射率の測定結果を含む他の測定結果はそれぞれのビーム120でなされうる。なお、当該他の測定結果は反射率の測定結果に限定されない。
【0023】
複数のレーダ110は、コンピュータシステム(不図示)と通信してもよい。複数のレーダ110は当該コンピュータシステムとデータ通信をしてもよく、当該コンピュータシステムにおいてデータは処理されてもよい。複数のレーダ110はコンピュータシステムから命令を受けてもよい。いくつかの実施形態において、コンピュータシステムはレーダから遠く及び/または現地外に設置されていてもよい。コンピュータシステムはレーダ110と一体であっていてもよい。いくつかの実施形態において、複数のレーダ110は互いに通信してもよい。複数のレーダ110はネットワーク化されたレーダシステムの一部であってもよい。ネットワーク化されたレーダ環境において、N台のレーダノードは共同作業してもよい。N台のノードは、一体となって大気の測定を行う1つのシステムとしてみなされてもよい。
【0024】
複数のレーダ110は様々な種類のレーダであってよく、異なる実施形態において異なる周波数で動作してもよい。複数のレーダ110は、以下のような、しかしながら以下に限定されない異なる周波数帯をカバーするレーダを含んでもよい。複数のレーダ110は、波長が約9〜15cmに対応し、周波数2〜4GHzで動作するSバンドレーダ、波長が約4〜8cmに対応し、周波数4〜8GHzで動作するCバンドレーダ、波長が約2.5〜4cmに対応し、周波数8〜12GHzで動作するXバンドレーダ、及び波長が約0.75〜2.5cmに対応し、周波数12〜40GHzで動作するKバンドレーダを含んでもよい。場合によっては、及び他の例では、異なるレーダは実質的には異なる周波数で動作してもよい。1つの例示的な実施形態では、レーダ110は全てXバンドレーダを含んでもよい。
【0025】
複数のレーダ110は、送信機と受信機の両方の構成を含み得るモノスタティックレーダを含んでもよい。いくつかの実施形態では、複数の送信機及び複数の受信機の少なくともいずれかを有するレーダ110を含んでもよい。1つの実施形態において、1つのレーダ110は、水平偏波用及び垂直偏波用の2つの送信機、及び水平偏波用及び垂直偏波用の2つの受信機を含んでもよい。いくつかの実施形態では、アナログ受信機を有するレーダ110を含んでもよい。いくつかの実施形態では、デジタル受信機を有するレーダ110を含んでもよい。いくつかの実施形態では、受信機を有するが送信機を有さないレーダ110を含んでもよい。いくつかの実施形態では、送信機を有するが受信機を有さないレーダ110を含んでもよい。いくつかの実施形態では、バイスタティック受信モード(bistatic receive mode)、あるいは干渉法(interferometric)モードのような、複数のモードで動作するレーダ110を備えてもよい。
【0026】
複数のレーダ110は、様々な種類のレーダを含んでもよい。レーダ110は、ドップラーレーダを含んでもよい。レーダ110は、パルスごとに送信された波の偏向、及びパルスごとの戻り波から受信された偏向状態を制御する、偏向能力を有してもよい。いくつかのレーダは単一偏向、あるいは二重偏向能力を有してもよい。単に一例として、偏向レーダは限定されることなく、以下の構成を含んでもよい。偏向レーダは、切替型二重偏波(switched-dual polarization)、二重チャネル二重偏波(dual-channel dual-polarization)、及び切替型二重チャネル偏波アジャイルレーダ(switched dual-channel, polarization-agile radar)を含んでもよい。
【0027】
複数のレーダ110は、異なる能力を有してもよい。複数のレーダ110は最小限の処理能力を有するレーダを含んでもよい。複数のレーダ110は、デューティサイクルにおける制限された敏捷性及びサポートされた波形信号を有するレーダを含んでもよい。レーダ110は、低コストのレーダを含んでもよい。デューティサイクルにおいて制限された敏捷性、及び複合波形信号をサポートする能力を有するレーダは、レガシーレーダ(legacy radar)として言及されてもよい。単に一例として、1つの例示的な実施形態では、複数のレーダ110はXバンドマグネトロンレーダ(X-band magnetron radar)を含んでもよい。いくつかの実施形態では、複数のレーダ110は、デューティサイクルにおけるより高い敏捷性、及び複合波形信号をサポートする能力を有するとともに、高度な処理能力を有するレーダを含んでもよい。複数のレーダ110は、マグネトロン、半導体、クライストロン、進行波管、及びマイクロ波電力モジュール送信機を有する送信機を含んでもよい。しかしながら、当該送信機は上述の構成に限定されない。
【0028】
いくつかの実施形態では、単一の一様なパルス繰り返し周波数の波形信号を送信しうる複数のレーダ110を含んでもよい。いくつかの実施形態では、複数のパルス繰り返し周波数の波形信号を送信しうる複数のレーダ110を含んでもよい。いくつかの実施形態では、複数のレーダ110のサブセットは、それぞれ少なくとも2つのパルス繰り返し周波数を有する波形信号を送信しうる。単に一例として、第1のレーダ110−aはPRFを有する波形信号を送信し、第2のレーダ110−bは2つのPRFを有する波形信号を送信し、そして第3のレーダ110−cは3つのPRFを有する波形信号を送信しうる。複数のレーダ110が送信するパルス繰り返し周波数は、いくつかの実施形態にでは、それぞれのレーダにおいて同一であってもよい。いくつかの実施形態では、他のレーダ110とは異なるパルス繰り返し周波数を有する波形信号を送信するレーダ110を含んでもよい。ネットワーク化された波形システムは、ネットワーク波形信号において、例えば2対3の比率のような有理数(あるいは分数)の形p/(p+1)として特定される異なるパルス繰り返し周波数を要求しなくてもよい。ここでpは、0ではない正の整数である。単に一例として、ネットワーク波形信号は1.6kHz及び1.84kHzのパルス繰り返し周波数を含んでもよい。
【0029】
複数のレーダ110は、複数のレーダのネットワークの一部であってもよい。複数のレーダのネットワークは、ネットワーク化されたレーダシステム(「NETRAD」:networked radar system)としてしばしば言及されうる。複数のレーダのネットワークは地理的に分散型複数のレーダを含んでもよい。ネットワーク化されたレーダシステムは、重複するカバレッジを有する複数のレーダを含んでもよい。レーダネットワークは、プロセッサ及び制御器を有するコンピュータシステムと通信してもよい。制御器は複数のレーダへネットワーク波形信号(または分散型波形信号)を送信するために用いられてもよい。プロセッサはレーダネットワークから受信したデータを処理するために用いられてもよい。複数のレーダ110は、ネットワーク制御可能であってもよい。いくつかの実施形態では、少なくとも1つのレーダ110は、コンピュータシステム機能性を含む、及びコンピュータシステムと一体である、の少なくともいずれかであってよい。複数のレーダ110を含むシステムの一部であるコンピュータシステムは、以下で詳細に説明する。
【0030】
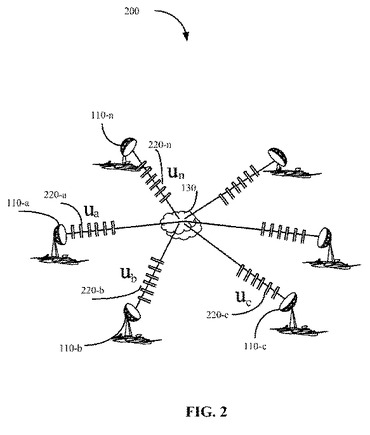
図2は、システム100の一例であるネットワークレーダのシステム200の実施形態を示している。それぞれのレーダ110−a、110−b、110−c、・・・、110−nはレーダ波形信号220−a、220−b、220−c、・・・、220−nを送信していることが示されている。それぞれのレーダ波形信号220は、レゾリューションボリューム130に向けられている。波形信号220の信号は、レゾリューションボリューム130で散乱され得る。220−aのような波形信号は、レーダ110−aに向けてレゾリューションボリューム130において後方散乱され得る。いくつかの実施形態において、レゾリューションボリューム130において散乱された波形信号220は、波形信号を送信したレーダに加え、他のレーダで受信される。レーダ波形信号220はネットワーク波形信号Uの一部であるとみなされてもよい。さらに単一のネットワーク波形信号のシステムを考慮し、ネットワーク波形信号Uは、個々のレーダ110に関連づけられた個々のレーダ波形信号220の収集を含んでもよい。レーダ波形信号220は、パルス繰り返し周波数をそれぞれ含んでいてもよい。それぞれのレーダ波形信号220のパルス繰り返し周波数は、いくつかの実施形態で同一のものであってもよい。いくつかの実施形態では、異なるレーダ110は、異なるパルス繰り返し周波数を有するレーダ波形信号220を送信してもよい。いくつかの実施形態では、複数の波形信号を送信するレーダ110を含んでもよい。いくつかのレーダは、1以上のパルス繰り返し周波数を含む波形信号を送信してもよい。いくつかの実施形態では、異なる種類の波形信号の送信を伴ってもよい。
【0031】
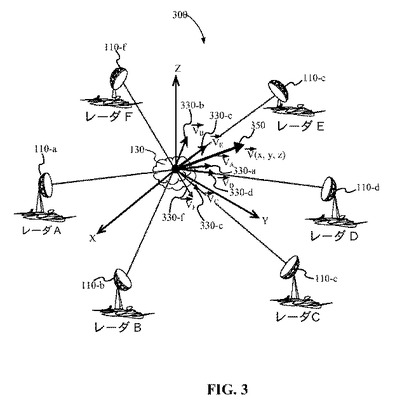
図3はシステム100の一例である、複数のレーダ110を含むシステム300の実施形態を示している。システム300はネットワーク化されたレーダシステムであってよい。システム300はネットワーク化されたレーダシステムであってもよい。いくつかの実施形態では、システム300はネットワーク化された波形システムであってもよい。レーダ110−a、110−b、・・・、110−fは、レゾリューションボリューム130における、関連づけられた視線速度330−a、330−b、・・・、330−fを判定用のデータを収集するために用いられてもよい。視線速度330はレーダ110において、レーダ110から送信された波形信号及び後方散乱された信号の位相を比較することにより測定され得る。このことはそれぞれのレーダ110のために、環境におけるレゾリューションボリューム130内のドップラー速度を判定しうる。それぞれのレーダ110と当該レーダに関連づけられた視線速度330とは異なる方向を示しうる。本出願において説明されるシステム、方法及びデバイスを使用することにより、レゾリューションボリューム130の固有速度350は、ネットワーク環境において一定である固有特性に基づいて判定されうる。いくつかの実施形態では、固有速度350は水平面において定義された、2次元の速度であってもよい。いくつかの実施形態では、固有速度350は、3次元の速度であってもよい。単に一例として、レゾリューションボリューム130の固有速度350は、レーダ110のビーム方向上に投影された場合に、結果として得られる速度がレーダ110の視線速度330に相当すると判定してもよい。いくつかの例において、視線速度は内包されたた及び/またはエイリアスされた速度情報を含んでもよい。複数のレーダからの測定結果を用いることにより、固有速度は、以下で詳細に記載される最適化等の異なる技術に基づいて判定される。
【0032】
いくつかの実施形態では、システム300はレゾリューションボリューム(例えば図1に示されたレゾリューション130)の状態の異なる測定を行うために用いられてもよい。単に一例として、反射率が測定されてもよい。本出願に記載されたシステム、方法、及びデバイスを用いることにより、上述した速度についてと同様にレゾリューションボリューム130の固有反射率が判定されてもよい。レーダ110はレゾリューションボリューム130の反射率に関する情報を受信してもよい。レゾリューションボリューム130の固有反射率は、レゾリューションボリューム130の固有反射率がレゾリューションボリューム130において一定であることに基づいて判定されてもよい。レーダ110のいくつかの反射率の測定結果は、重複エコー(overlaid echo)からのデータのエイリアシング及び/または内包、またはビームの減衰等の他の要因に依存して異なりうるため、固有反射率はデータの統合処理、及び複数のレーダ測定結果で正確な反射率の判定により判定されうる。第2のトリップ信号あるいは重複エコーは、データ品質を劣化させる不要なエコーを含むかもしれない。このことは、すでに送信されたパルスについて受信された信号により引き起こされうる。
【0033】
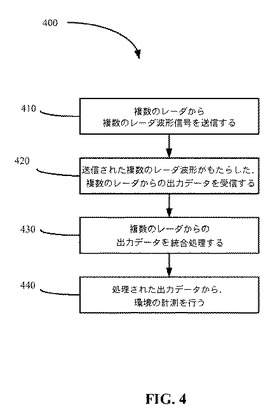
ここで、レーダ測定結果の曖昧性を解決するために複数のレーダを使用する方法400の実施形態について、図4を用いて説明する。方法400は、図1のシステム100のようなシステムにおいて実装されうる。
【0034】
ブロック410において、複数のレーダ波形信号は、複数のレーダから送信される。当該複数のレーダは、環境の異なる位置に配置されうる。いくつかの実施形態では、複数のレーダ波形信号は、ネットワーク波形信号を構成してもよい。複数のレーダはネットワーク化されたレーダシステムの一部であってもよい。ネットワーク波形信号は、いくつかの実施形態では分散型波形信号としても言及されてもよい。それぞれのレーダ波形信号は、複数のレーダ内の1つの特定のレーダから送信されうる。
【0035】
レーダ波形信号はパルス繰り返し周波数を含みうる。いくつかの実施形態では、1つのレーダは追加のパルス繰り返し周波数を含んでもよい、単一及び/または複数の波形信号を送信しうる。いくつかの実施形態では、それぞれのレーダは同一のパルス繰り返し周波数を含む波形信号を送信しうる。いくつかの実施形態では、1以上のレーダは、異なるパルス繰り返し周波数を有するレーダ波形信号を送信しうる。
【0036】
いくつかの実施形態では、方法400は特定のレーダ波形信号を送信するために、複数のレーダへの送信命令を含んでもよい。送信された命令は、特定のネットワーク波形信号を送信するための命令を含んでいてもよい。いくつかの実施形態では、特定の種類の測定を実行するように決められた特定のネットワーク波形信号を含んでもよい。単に一例として、特定のネットワーク波形信号は、竜巻検出、暴風、追跡、及び水文地質学等の目的の用途に併せて決められてもよい。1つの例示的な実施形態では、複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、ある値よりも大きい風速の測定をサポートするために決められてもよい。単に一例として、複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、60m/s、70m/s、80m/s、90m/s、100m/s、110m/s、120m/s、130m/s、及び140m/s以上の速度測定をサポートしうるレーダデータを供給するように決められてもよい。1つの特定の実施形態では、100m/s程度の速さの速度の測定結果は、個々に25m/s未満の速度測定をサポート可能な、複数のレーダ波形信号を有するネットワーク波形信号を用いて判定されうる。複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、個々のレーダ波形信号またはレーダ自身が高速度測定をサポート可能な特異なデータを提供できない場合であっても、これらの速度以上の速度測定をサポートするように決定され得る。
【0037】
いくつかの実施形態では、ネットワーク波形信号は以下のような式により示されてもよい。
【0038】
【数4】
ここで、
はk番目のレーダにおいて送信された信号を示すベクトルqk×1であり、k番目のレーダそれぞれは、送信波形信号qkを有してもよい。ネットワーク化された波形システムの規模Mは、以下のような式により定義される。
【0039】
【数5】
【0040】
本発明の精神を逸脱せずに、ネットワーク波形信号あるいは複数の波形信号を数学的に示す他の方法の存在は、本技術分野に属する当業者により理解されるであろう。
【0041】
ネットワーク化されたレーダシステムのカバレッジ内の媒体は、ネットワーク波形信号Uを用いて測定されうる。当該媒体の固有特性はUを用いてなされる測定結果において終始一貫していてもよい。速度及び反射率を含むがそれに限定されない測定結果は、送信された波形信号Uを用いてなされてもよい。Uを用いる、それぞれのレーダにおけるエイリアスのない速度は、例えば方法400の他のブロックで説明されるように判定されうる。
【0042】
ブロック420において、複数のレーダからの出力データは受信されうる。出力データは、送信された複数のレーダ波形信号の結果として得られる。いくつかの実施形態では、出力データは送信されたネットワーク波形信号の結果として得られる。いくつかの実施形態では、出力データはネットワーク波形信号から受信された、個々のレーダの信号及びデータ結果が考慮されてもよい。出力データは、いくつかの実施形態において生データであってもよい。いくつかの、全ての出力データを受信するコンピュータシステムが実行する処理のような、レーダの能力及び他の要因に依存するいくつかのレーダによるデータ処理を含んでもよい。出力データは、受信された出力のような反射率の測定結果に関するデータを含んでもよい。出力データは、レーダ波形信号及びネットワーク波形信号の少なくともいずれかのような、受信した後方散乱信号と送信された信号の位相間の位相シフトを反映するデータのような速度の測定結果に関するデータを含んでもよい。いくつかの実施形態では、複数のレーダからの出力データがネットワーク波形信号の送信結果であると判定されてもよい。
【0043】
いくつかの実施形態では、コンピュータシステムは出力データを受信してもよい。コンピュータシステムは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令を有する処理コードを含んでもよい。方法400で用いられ得るコンピュータシステムについては、以下で詳細に説明される。
【0044】
いくつかの実施形態では、少なくともエイリアスされたデータサブセットを有する出力データを含んでもよい。上述したように、単一のパルス繰り返し周波数を有する波形信号を送信する単一のドップラーレーダは
等の式により決定される一義的な距離を判定しうる。ここで、cは光速である。パルス繰り返し周波数の周期的性質に起因して、整数倍raにより分離された環境の測定量が、単一のパルス繰り返し周波数を用いて微分可能であるように、データはエイリアスまたは内包されてもよい。このことはデータ測定を曖昧にしうる。同様に、一義的な最大速度は次のような式
により決定され得、内包及びエイリアシングの少なくともいずれかは、送信されたレーダ及び/またはネットワーク波形信号がvaより高速で動く速度の測定がなされる場合に生じうる。以下のブロックは、複数のレーダからの出力データを、環境の正確な測定結果を判定するためのエイリアス除去、及び/または拡張データを判定するために、統合して処理してもよい。
【0045】
ブロック430で、複数のレーダからの出力データは、統合処理され得る。以下に説明するコンピュータシステムは、いくつかの実施形態においてデータを統合処理してもよい。出力データは、データにおける曖昧性を解決するために統合処理されてもよい。出力データは、環境の正確な測定を判定するために統合処理されてもよい。環境の正確な測定結果は、環境内の測定された体積要素(volume element)及びレゾリューションボリュームの固有速度または固有反射率のような、環境の本質的な測定結果を反映してもよい。環境の正確な測定結果は、環境の一義的な測定結果であってもよい。データの統合処理は、既知の送信された複数のレーダ波形信号、及び/またはネットワーク波形信号に依存しうる。出力データの処理、及びその後のブロック440における環境の測定結果の判定は、反射率及び/または速度等、測定されている媒体の潜在的な固有特性がネットワーク環境において一定である原理に依存してもよい。ネットワーク波形信号は、複数のレーダのカバー領域における観測の曖昧性を解決するために構成されてもよい。複数のレーダからの出力データは、位置、距離、ビーム方向、及び異なるレーダからのデータを同期させるための時間情報の少なくともいずれかを含んでもよい。レーダ間の干渉性も、通常のGPSかネットワークを介した他の手段のいずれかにより維持されてよい。いくつかの実施形態では、出力データは、当該出力データが送信されたネットワーク波形信号の結果として得られたものであるか否かを判定するために処理されてもよい。
【0046】
単に一例として、複数のレーダからの出力データの統合処理は、複数のレーダからの測定されたドップラー速度に関連する出力データに、デカルト座標系の風系場を関連づける処理を含んでもよい。デカルト座標系の風系場、及び測定されたドップラー速度は、次のような式を介して互いに関連づけられてよい。
【0047】
【数6】
ここでCkは階数pのN×M組み合わせマトリックスであり、Nは複数のレーダのうちの測定結果のためのデータを提供するレーダの数であり、Mはネットワーク化された波形システムの次元、あるいは複数のレーダにより送信された波形信号の数であり、
は測定されたドップラー速度ベクトルであり、Gはデカルト座標系の風系場、及び複数のレーダノードにおいて測定されたドップラー速度に関連する次のような幾何学変換であり、
【0048】
【数7】
そして
はデカルト座標系の風系場のベクトルである。Ckは要素が0及び1であるマトリックスであってよい。Ckは、ネットワーク波形信号Uの列数により形成されるN組に基づいて、構成要素を1あるいは0に設定することにより構成されてもよい。pはUの実行できるN組の総数である。
の要素はエイリアスされた速度であるから、u(k)(及びv(k))における誤差は大きくなりうる。
【0049】
上述したシステムは、ネットワークの一貫性の強制により、曖昧性が解決されうる。速度の曖昧性は、風系場の直接推定により解決されうる。当該解決は、次のような最適化問題を解くことによりされうる。
【0050】
【数8】
は、要素が水平面における速度成分である風ベクトルであり、
は取得された風速ベクトルである。推定された風速ベクトルは、以下の式により得られる、それぞれのレーダノードにおける拡張視線速度を得るために用いられ得る。
【0051】
【数9】
【0052】
いくつかの実施形態では、風速ベクトル
は暴風雨における運動学を調査するためのマルチドップラー解析(multi-Doppler analysis)において用いられる。故にいくつかの実施形態では、暴風雨構造の運動学解析のためにいくつかの実施形態で用いられ得るエイリアスのない風系場は判定されうる。いくつかの実施形態では、竜巻に関連する剪断特性(shear feature)の検出のために、
を用いてもよい。
【0053】
ブロック440は、
及び/または
のような環境の測定結果が、処理された出力データから判定されうることを示している。反射率の測定結果を含むがこれに限定されない他の測定結果は、いくつかの実施形態において、体積要素における媒体の潜在的な固有反射率がネットワーク環境において一定である原理を用いてなされてもよい。
【0054】
環境内の地点における速度及び反射率等の、環境の正確な測定結果を判定するための曖昧性を解決するための他の方法がある。単に一例として、測定されたドップラー速度における曖昧性を解決するための方法のバリエーションは、次のような式により与えられるデカルト座標系の改良された風系場を用いることにより求められうる。
【0055】
【数10】
ここで、Vはそれぞれのレーダノードにおける波形信号から得られたナイキスト補正要素(Nyquist correction element)(2va)であり、nは整数のベクトルである。クラスタリング問題(clustering problem)は次のような式を用いて解かれうる。
【0056】
【数11】
ここで、
はu(k)の平均である。地点u(k)の近接するクラスタを形成するnの値は、解
である。解
が得られると、正確な速度は、ナイキスト補正要素から得ることができる。拡張速度は、次のような式で得ることができる。
【0057】
【数12】
【0058】
これらの方法は、反射率及び速度のような媒体の潜在的な固有特性がネットワーク環境において一定である原理に基づいて、複数のレーダからの出力データにおける曖昧性を解決するための方法である二例を提供する。複数のレーダからの出力データに基づいて環境の正確な測定結果を判定するために、当業者が理解するであろう本発明の精神の他の方法が用いられてもよい。
【0059】
方法400、及びシステム100、200、及び300に関連して述べられた方法及びシステムは、個々のシステム要素がどのように分離されてあるいはより一体化されて実装されるかを概略的に示した図5に図示されるような、コンピュータシステム500を用いることにより、一部分が実装されてもよい。システム500は、バス526を解して電気的に連結されたハードウェア要素を備えて示されている。ハードウェア要素は、プロセッサ502、入力デバイス504、出力デバイス506、記憶デバイス508、コンピュータ読み取り可能記録媒体リーダ510a、通信システム514、DSPや専用プロセッサ等の処理加速ユニット516、及びメモリ518を含みうる。コンピュータ読み取り可能記録媒体リーダ510aは、コンピュータ読み取り可能記録媒体510bにさらに接続されてもよい。当該接続は、コンピュータ読み取り可能情報を含む、リモート、ローカル、固定、及び着脱可能な記憶デバイスの少なくともいずれかに加えて、一時記憶及び/または恒久記憶記録メディアを統合的に表す。通信システム514は、有線、無線、モデム、及び他の種類の接続インタフェースの少なくともいずれかを含み、レーダから収集されたデータを許容する。場合によっては、このようなデータ収集は、環境の固有特性の評価において、通信システムにより実時間で実行されてもよい。
【0060】
システム500は、図ではワーキングメモリ520に配置されるものとして示された、発明の方法を実装するために設計されたプログラム等の、オペレーティングシステム524及び他のコード522を含みうるソフトウェア要素を含んでもよい。単に一例として、システム500は複数のレーダからのデータを受信するための命令、及び環境の測定結果を判定するためのデータを統合処理するための命令を含みうる処理コードを含んでもよい。いくつかの実施形態では、処理コードは、複数のレーダより得られたデータから正確な測定結果を判定するための命令を含んでもよい。いくつかの実施形態では、処理コードは複数のレーダからのデータをエイリアス除去及び拡張の少なくともいずれかを行ってもよい。様々なバリエーションが特定の要求に関連して用いられてもよいことは、同一の技術分野に属する当業者にとっては明らかであろう。例えば、カスタマイズされたハードウェアが使用される、及び/または特定の要素がハードウェア、ソフトウェア(アプレット等の携帯用ソフトウェアを含む)、あるいはその両方において実装されてもよい。さらに、ネットワーク入出力デバイスのような、他の計算デバイスへの接続が使用されてもよい。
【0061】
次に記載されるネットワーク化された波形システムの性能を評価するための特定のシミュレーション及び実際の試験は、発明者により既に実施された。追加の実施形態は、以下の記載により理解されるだろう。
【0062】
シミュレーションは、様々な実施形態に関連する3台のレーダのネットワークが配置された。図6A乃至Cにおいて、非常に激しい風を測定するために設計されたネットワーク化された波形システムを用いて推定された、1つの実施形態のドップラー速度のヒストグラムが示されている。30dBZ規模のレゾリューションボリュームを有する3つのノードレーダネットワークにより測定されたドップラー速度は、100m/s(>220mph)より大きい。本シミュレーションにおいて、毎秒113メートルの速度が測定された。今のところ、図6A乃至Cに示す、個々のレーダの測定可能な最大のドップラー速度は、25m/s未満である。高速度を測定するためのネットワーク波形信号の設定は、KCYRのu1、KSAOのu2、及びKRSPのu3を有するネットワーク波形信号Uが含められた。u1の波形信号は1.6kHz及び2.08kHzのパルス繰り返し周波数であり、u2の波形信号は1.76kHz及び2.24kHzのパルス繰り返し周波数であり、u3の波形信号は1.92kHz及び2.4kHzのパルス繰り返し周波数である。シミュレーションにおけるレーダ配置は、さらに次で説明される。
【0063】
図6D乃至Fは、1つの実施形態において複合波形信号をサポート不可能な、低コスト送信機のために設計されたネットワーク化された波形システムから得られたドップラー速度のヒストグラムを示している。シミュレーションは、オクラホマ州南部の現在の大気強調測定センター(「CASA」) IP−1の、シリルに位置するレーダ(「KCYR」)、チカシェーに位置するレーダ(「KSAO」)、ラッシュスプリングスに位置するレーダ(「KRSP」)により実行された。レーダは、4m/sのスペクトル幅において動作し、40m/sより大きい速度が測定されうる観測能力を有する。図6Dは、シリルに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。図6Eは、チカシェーに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。図6Fは、ラッシュスプリングに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。
【0064】
図7A乃至Dは、制限された敏捷性の送信機を有する1つの実施形態のマグネトロンレーダシステムのネットワークにより観測される、シミュレートされた竜巻の循環特性を示している。シリルのレーダにおいて得られたドップラー速度は、測定された速度は多数の内包を示しているが、40m/s以上においては、内包のない実際の速度と一致する。図は、シリルから60km離れた、竜巻の循環特性のシミュレーション結果を示している。図7Aは、シリルのレーダにおいて測定された反射率のシミュレーション結果を示している。図7Bは、シリルのレーダにおける実際のドップラー速度のシミュレーションを示している。図7Cは、シリルにおける測定されたドップラー速度のシミュレーションを示している。図7Dは、ネットワーク化された波形システムを用いてシリルにおいて得られた、シミュレートされたドップラー速度を示している。
【0065】
図8A乃至Dでは、広範囲にわたってSバンドレーダにより観測された実際の反射率が、1つの実施形態の短距離レーダの観測のシミュレートのために用いられる。4つのノードにおける反射率は、図8A、B、C、及びDにみられるように、空間的に独立した重複エコーにより品質が劣化している。図8E及びFは、得られた反射率が重複エコーを有さず、1つの実施形態に係る4つのノードのレーダネットワークのカバー領域において実際の反射率と非常に一致していることを示している。図8Aは、チカシェーにおいて測定された反射率を示している。図8Bはラッシュにおいて測定された反射率を示している。図8Cはシリルにおいて測定された反射率を示している。図8Dは、ロートンにおいて測定された反射率を示している。図8Eは、実際の反射率を示している。図8Fは、ネットワーク波形信号から得られた反射率を示している。
【0066】
これらのシミュレーションにおいて、速度拡張誤差は風速ベクトル及び分散型波形構造により決定され得る。ノードにおいて測定されたドップラー速度は、特定のレゾリューションボリュームにおける、風速及び風向の関数に正比例しうる。図9は、1つの実施形態に係るIP1ネットワークの3つのノードの中間にある、特定のレゾリューションボリュームの風速及び風向の関数としての速度拡張誤差を示している。レゾリューションボリュームはシリルのレーダから方位角60度の方向に20kmの地点に位置する。1m/sの非常に高い変化が、速度誤差分布に用いられた。図9において非常に高い速度拡張誤差を有する領域は、ノードにおける視線速度が波形信号のナイキスト速度により近い状況において発生する。しかしながら、高い誤差を有する領域は、エラーが5%以下、及び全体の速度拡張誤差が3.5%である領域よりもより小さい。この限定は、推定された風系場における空間フィルタを実行することにより減らされうる。また、高いエラーを有する領域は、より限られた誤差分散が用いられる場合に減らされうる。平均誤差は、風速及び風向を変化するためのレゾリューションボリュームについて得られるかもしれない。平均拡張誤差は、レーダネットワーク内のレゾリューションボリュームの位置の関数である。
【0067】
図10Aは、1つの実施形態に係る3つのレーダノードを用いたネットワーク波形信号の平均拡張誤差を示している。レーダの基線に沿ったエラーが高くなりうることが、図10Aにおいてみられる。基線領域における高い誤差を推定するための1つの手段は、より多いレーダノードを有するネットワーク波形信号を有することである。例えば、図10Bは1つの実施形態に係る、4つのレーダノードが実装されたネットワーク化された波形システムを示している。シリルとラッシュスプリング間のベース誤差が低減されたことが、図10Bにおいてみられる。故に、大きく、密度の高いレーダネットワークにおいて、基線上のより高い誤差は、ネットワーク化された波形システムを用いることにより低減されうる。
【0068】
非常に高いドップラー速度を測定するためのネットワーク化された波形システムの能力を解析するために、発明者によってなされたシミュレーションは、竜巻が存在する水平風系場のモデルに、ランキンモデル(Rankine model)(ウッド,V.T.及びR.A.ブラウン、“対称性を有する回転軸及び発散場の単一ドップラー速度定数におけるレーダ近傍の効果(Effects of radar proximity on single-Doppler velocity signatures of axis symmetric rotation and divergence.)”、1992年、月刊気象レビュー(Monthly Weather Review)、p.120, 2798ー2807)が使用されてなされたものであり、1つの実施形態に係るネットワーク環境において測定された速度分散をシミュレートするために用いられ得る。レーダノードにおいて測定されるドップラー速度は、次の式により得られる。
【0069】
【数13】
ここでvrは視線速度のピークであり、vtは渦の範囲の中心における正接速度のピークである。rc、rp、及びrvはレゾリューションボリューム及び渦の中心それぞれのレーダ距離である。θp及びθvは、レゾリューションボリューム及び渦の中心それぞれの方位角であり、そしてrは渦の中心からレゾリューションボリュームの距離である。シミュレーションでは
【0070】
【数14】
であるものとする。
【0071】
ドップラー速度の距離特性は、Uのようなネットワーク波形信号により得られた測定結果を有するネットワークレーダ環境における1m/sの変化を伴う、上位のランキンモデルの式に基づいてシミュレートされてもよい。1つの実施形態において、偏向されていない60m/sの速度が、図11Bに示されるような許容可能な標準偏差を有して測定可能であることは、図11Aにみられる。ネットワーク波形信号を用いるネットワークレーダ(「NETRAD」)読み出しの標準偏差は、1.5m/s未満である。図11Cは、1つの実施形態において、シリルにおけるNETRAD読み出しでの拡張誤差を示している。60m/sの速度の測定結果であるが、拡張誤差は5%未満である。図11に示される結果に用いられたネットアーク波形信号Uは、低コストハードウェア用に設計された。本例では、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0072】
Uは、±100m/sの速度、いくつかの実施形態ではさらに高い速度を測定するために設計されてもよい。例えば、本シミュレーションにおいて、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び2.08kHzのPRFを含み、u2の波形信号は1.76kHz及び2.24kHzのPRFを含み、u3の波形信号は1.92kHz及び2.4kHzのPRFを含んだ。図7A乃至Dに参照を戻す。図7の図は、シミュレーションに基づくIP1の領域においてシミュレートされた、竜巻の循環のドップラー速度の測定結果を示している。IP1レーダネットワークを使用したネットワーク波形信号シミュレーションは、1度の仰角を有する。図7A及びBは、シリルにおけるノード波形信号を用いた測定結果を示しており、図7Aは1.6kHzと同一のパルス繰り返し周波数を用いて測定された速度を示しており、図7Bは1.84kHzのパルス繰り返し周波数を用いて測定された速度を示している。図7Cは、シリルにおける実際のドップラー速度を示している。ネットワーク波形信号の読み出しは図7Dに示さており、ネットワーク波形信号読み出しが±60m/s周辺の速度を測定可能であることがみられる。
【0073】
ネットワーク化された波形システムは、1つの実施形態において使用可能な4つのノードのレーダネットワークにより収集されたデータを用いて発明者により実験された。第1世代CASAレーダネットワークはオクラホマ州に展開され、当該レーダネットワークは、上述したシミュレーションにおいてもモデルとされた。ネットワーク化された波形システムは、低コストのXバンドレーダを含むIP1レーダネットワーク内に実装された。シリル、チカシェー、及びラッシュスプリングにある3つのノードのデータセットは、2008年3月31日17:50:32(UTC)において収集された。IP1レーダネットワークは1度の仰角で設置された。図12A乃至Dは、1つの実施形態に係る分散型波形信号を使用するシリルのレーダにおけるネットワーク読み出しの平面位置表示器(「PPI」:plan position indicator)を示している。測定されたドップラー速度は、図12A及びBに示される。図12Aにおいて、シリルで測定された速度は、1.6kHzのパルス繰り返し周波数でなされたものである。図12Bにおいて、シリルで測定された速度は、1.84kHzのパルス繰り返し周波数でなされたものである。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は図12Cに示される。図12Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。適切なS/N比を有する領域において、分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。ドップラー速度は全く高くないが、ネットワーク化された波形システムのアプリケーションは、60m/s及び100m/sさえも超える、より高い速度を測定するために適用されうる。
【0074】
1つの実施液体に係るシリルのレーダにおける、ネットワーク読み出しの速度及び反射率が示された図13A及びBにおいて、実際の結果から得られる追加の情報も示されている。ドップラー速度及び反射率は、図13A及びBのそれぞれにおいて、方位角に対してプロットされる。
【0075】
図14A乃至Dは、1つの実施形態において、図12及び13について記載されたデータの別の視点を提供している。測定されたドップラー速度は、図14A及びBに示されている。図14Aにおいて、シリルで測定された速度は、1.6kHzのパルス繰り返し周波数でなされたものである。図14Bにおいて、シリルで測定された速度は1.84kHzのパルス繰り返し周波数でなされたものである。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は、図14Cに示される。図14Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。図14に示された測定結果のために用いられたネットワーク波形信号Uは、低コストハードウェアのために設計された。本例では、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0076】
図15A乃至Dは、1つの実施形態に係る低コストのXバンドレーダを含む、IP1レーダネットワークにおいて実装された、ネットワーク化された波形システムによる追加の実験結果を示している。シリル、チカシェー、及びラッシュスプリングにある3つのノードのデータセットは、2008年6月17日16:08:44(UTC)において収集された。測定されたドップラー速度は、図15A及びBに示される。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は図15Cに示される。図15Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。適切なS/N比を有する領域において、分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。IP1レーダネットワークを用いたネットワーク化された波形システムの実装は、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだネットワーク波形信号Uが用いられた。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0077】
回路、論理モジュール、ブロック、プロセッサ、及び他の要素の少なくともいずれかは、様々な動作を実行するために構成されているものとしてここでは記載された。同一の技術分野に属する当業者は、構成が設計、設置、相互接続、及び/または特定の要素のプログラムの実装により、また構成された要素が異なる動作を再構成可能であってもなくてもよいように実装されることにより達成され得ることを理解するだろう。例えば、プログラム可能なプロセッサは、適切な実行可能なコードを提供することにより構成され得る、専用の論理回路は論理ゲート及び他の回路素子に適切に接続することにより構成され得る、など。
【0078】
上述した実施形態は、特定のハードウェア及びソフトウェア要素を参照したが、同一の技術分野に属する当業者は、ハードウェア及びソフトウェア要素の少なくともいずれかの異なる組み合わせが用いられてもよいし、ハードウェアに実装されるものとして記載された特定の動作はソフトウェアまたはその他の手段に実装されてもよいことは、理解するだろう。
【0079】
本発明の様々な特徴を組み入れたコンピュータプログラムは、様々なコンピュータ読み取り可能な記録媒体に符号化されてもよい。適切な媒体は、磁気ディスクあるいはテープ、CDやDVDのような光学記録媒体、フラッシュメモリ等である。プログラムコードが符号化されたコンピュータ読み取り可能な記録媒体は、互換デバイスにパッケージされてもよいし、他のデバイスに分割されて提供されてもよい。さらにプログラムコードは符号化され、インターネットを含む様々なプロトコルに適合する有線及び/または無線ネットワークを介して送信されてもよく、これにより例えばインターネットダウンロード等の手段で配布してもよい。
【0080】
上述した記載は例示的な実施形態のみを提供するものであり、開示の範囲、適用性、または構成を限定する目的ではない。さらに、上述した例示的な実施形態では、1以上の例示的な実施形態の実装を可能にする説明を、同一の技術分野に属する当業者に対して提供するだろう。発明の精神及び範囲を逸脱することなく、様々な変更が要素の機能及び構成においてなされうることは理解される。本明細書にはいくつかの実施形態が記載された。様々な特徴は異なる実施形態に帰するが、1つの実施形態について記載された特徴は他の実施形態に組み込まれてもよいことは理解されるべきである。さらに、記載されたいかなる実施形態の特徴は、発明の全ての実施形態に重要であると考えられるべきであるが、発明の他の実施形態では、当該特徴は省略されてもよい。
【0081】
特定の詳細な記載は、実施形態の完全な理解を提供するために上述した記載では示された。しかしながら、実施形態はこれらの特定の詳細な記載に限定されることなく実行され得ることは理解されよう。例えば、不必要な詳細な記載により実施形態を不明確にしないために、ブロック図において回路が示されてもよい。別の事例において、実施形態を不明確にしないために不必要な詳細な記載ではなく、公知の回路、処理、アルゴリズム、構造、及び技術が示されてもよい。
【0082】
また、実施形態はフローチャート、フロー図、データフロー図、構造図、またはブロック図として表現された処理として記載されてもよいことに留意される。フローチャートは、順次的な処理としての実施について述べられているが、実施の多くは、平行または同時に実行されうる。さらに、実施の順番は変更されてもよい。処理は、図に示されない追加のステップを有しうるが、当該実施が完了した際に終了される。処理は、方法、関数、手順、サブルーチン、サブプログラム等に対応してもよい。処理が関数に対応する場合、当該処理の終了は、読み出し関数またはメイン関数への関数のリターンに対応する。
【0083】
さらに実施形態は、スクリプト言語、ミドルウェア、マイクロコード、ハードウェア記述言語、及びそれらのいかなる組み合わせ、の少なくともいずれかを用いる、ハードウェア及びソフトウェアの少なくともいずれかで実装されてもよい。ソフトウェア、ファームウェア、ミドルウェア、スクリプト言語、及びマイクロコードの少なくともいずれかに実装された場合、プログラムコードまたはコードは、記録媒体のようなコンピュータ読み取り可能な媒体に格納された必要なタスクを実行するために分裂する。コードセグメントまたはコンピュータ実行可能な命令は、手順、関数、サブプログラム、プログラム、ルーチン、サブルーチン、モジュール、ソフトウェアパッケージ、スクリプト、クラス、またはこれらのいかなる組み合わせ、データ構造、及びプログラムステートメント、の少なくともいずれかを表し得る。情報、データ、引数、パラメータ、及びメモリコンテンツの少なくともいずれかを通過及び受診することにより、コードセグメントは、他のコードセグメントまたはハードウェア回路と結合されてもよい。情報、引数、パラメータ、データ等は、メモリ共有、メッセージ通過、トークン通過、ネットワーク送信等を含む、適した手段を介して、通過、転送、送信されてもよい。
【0084】
1以上の実施形態の詳細な記載は上述されたが、発明の精神を変更することのない、様々な代替物、変更、及び相当物は、同一の技術分野に属する当業者に理解されるだろう。さらに、明らかに不適当あるいは他の明示的な記載を覘き、異なる実施形態の特徴、デバイス、構成要素の少なくともいずれかが代用される及び/または組み込まれてもよいことは、理解されるべきである。故に、上述した記載は、添付の請求項により定義される発明の範囲を限定するものとして理解されるべきではない。
【技術分野】
【0001】
本出願は、概してレーダに関する。特に本出願は、レーダ測定結果の曖昧性を解決するための方法、システム及びデバイスに関する。
【背景技術】
【0002】
気象レーダシステムの基本的な目的の1つは、竜巻のような異常な気象現象の定量的な測定を行うために、地球周囲の大気をサンプリングすることにある。しかしながら、一様なパルス繰り返し周波数(pulse repetition frequency)のパルス波を送信するモノスタティック(monostatic)ドップラーレーダは、パルス繰り返し周波数及びレーダ波長に基づいて一義的に決まる、最大距離及び最大速度における限界に直面している。ある波長に固定された場合、上述した一義的な最大距離及び最大速度はトレードオフな関係を有しうる。このトレードオフな関係は、Xバンドレーダのような短波長レーダにおけるものより厳しくさえあるだろう。
【0003】
従って、レーダ測定結果の曖昧性を解決するための、稼働しているレーダ装置の改良方法、及びシステムに関する技術分野において、一般的な需要がある。
【発明の概要】
【課題を解決するための手段】
【0004】
レーダ測定結果の曖昧性を解決するためのネットワーク化された波形システムは、1つの実施形態により提供される。ネットワーク化された波形システムは、環境内の異なる地理的位置に配置された複数のレーダを含みうる。複数のレーダは、ネットワーク化されたレーダシステムの一部であってよい。複数のレーダは、ネットワーク波形信号を送信するように構成されてよい。ネットワーク波形信号は、複数のレーダ波形信号を含みうる。複数の波形信号のそれぞれは、複数のレーダのうちの特定のレーダにより送信されてよい。システムはまた、プロセッサ及びメモリを有し、複数のレーダと一体となったコンピュータシステムを含みうる。メモリは、複数のレーダから受信したデータ、プロセッサにより処理されたデータ、及びプロセッサによって実行可能な処理コードを含む情報を格納するように構成され得る。処理コードは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令と、ネットワーク波形信号に基づいて、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する命令と、を含みうる。
【0005】
レーダ測定結果の曖昧性を解決する方法も提供される。方法は、環境内の異なる位置に配置された複数のレーダから、複数のレーダ波形信号を送信する工程を含む。方法はまた、送信された複数のレーダ波形信号の結果として得られる出力データを、複数のレーダから受信する工程を含む。出力データの少なくとも1つのサブセットがエイリアスされ得る。方法はまた、複数のレーダからの出力データを統合処理する工程を含む。方法は、処理された出力データから、エイリアスのない、環境の測定結果を判定する工程を含む。
【0006】
ネットワーク化されたレーダシステムも提供される。ネットワーク化されたレーダシステムは、複数のレーダからネットワーク波形信号を送信する送信手段を含む。ネットワーク波形信号は複数のレーダ波形信号を含みうる。ネットワーク化されたレーダシステムはまた、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する受信手段を含む。ネットワーク化されたレーダシステムは、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する処理手段を含む。
【0007】
ドップラーレーダの測定方法も提供される。ドップラーレーダの測定方法は、複数のレーダからのレーダデータを用いて、少なくとも毎秒100m/sの速度を判定する工程を含む。複数のレーダのそれぞれは、100m/s未満の速度の測定をサポート可能なレーダデータを提供するように構成される。
【0008】
特許または出願書類は、少なくとも1つの有色で作成された図を含む。有色の図面を有する本特許または特許出願公開の複製は、要求とともに必要な手数料を支払うことで、局より提供されるであろう。
【0009】
添付の図面において、同様の要素及び機構の少なくともいずれかは同一の数字の参照ラベルを有しうる。さらに、同じタイプの様々な要素は、当該同様の要素及び機構の少なくともいずれかを識別する文字を参照ラベルの後に付すことにより区別されうる。明細書において最初の数字の参照ラベルのみが用いられた場合、当該記載は、添え字に関わらず、同一の最初の数字の参照ラベルを有する同様のコンポーネント及び機構の少なくともいずれかの全てに適用可能であるものとする。
【図面の簡単な説明】
【0010】
【図1】様々な実施形態に係るレーダシステムを示す。
【図2】様々な実施形態に係るレーダシステムを示す。
【図3】様々な実施形態に係るレーダシステムを示す。
【図4】様々な実施形態に係る、環境の測定結果を判定するためのフローチャートを示す。
【図5】以下に記載された実施形態の様々な態様を計算するために用いられうる計算システムのブロック図を示す。
【図6】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションに基づく、シミュレートされたドップラー速度を示す。
【図7A】、
【図7B】、
【図7C】、
【図7D】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションに基づく、竜巻の循環特性についてのシミュレーション結果を示す。
【図8A】、
【図8B】、
【図8C】、
【図8D】、
【図8E】様々な実施形態に係る、ネットワーク化された波形システムで用いられうる、短距離レーダをシミュレートするためのSバンドレーダによって観測された実際の反射率を示す。
【図8F】図8A乃至Eにおける、観測された反射率に基づく、ネットワーク波形信号から得られた反射率を示している。
【図9】様々な実施形態に係る、ネットワーク化された波形システムのシミュレーションのための風速及び風向の関数として、速度拡張誤差を示す。
【図10A】、
【図10B】様々な実施形態に係る、それぞれがネットワーク波形信号を用いた、3または4のノードシステムのシミュレーションについての、速度拡張誤差を示す。
【図11A】、
【図11B】、
【図11C】様々な実施形態に係る、ネットワーク波形信号シミュレーションについての、測定された速度、標準偏差、及び拡張誤差を示す。
【図12A】、
【図12B】、
【図12C】、
【図12D】様々な実施形態に係る、2008年3月31日の降水事象に関するネットワーク化/分布された波形信号について読み出された速度に加え、反射率及び速度観測を示す。
【図13A】、
【図13B】様々な実施形態に係る、2008年3月31日の降水事象に関するネットワーク読み出しを用いて測定されたドップラー速度及び反射率を示す。
【図14A】、
【図14B】、
【図14C】、
【図14D】様々な実施形態に係る、2008年3月31日の降水事象のネットワーク/分布された波形信号について読み出された速度に加えて、別の反射率及び速度観測を示す。
【図15A】、
【図15B】、
【図15C】、
【図15D】様々な実施形態に係る、2008年6月17日の降水事象のネットワーク/分布された波形信号について読み出された速度に加えて、別の反射率及び速度観測を示す。
【発明を実施するための形態】
【0011】
一様なパルス繰り返し周波数(「PRF」:pulse repetition frequency)を用いて送信を行うモノスタティックドップラーレーダは、パルス繰り返し周波数(「PRF」)及び波長(「λ」)により一義的に決まる、最大距離(「ra」)及び最大速度(「va」)における限界に直面しうる。一義的な最大距離raは、次のような式を用いて決定されるであろう。
【0012】
【数1】
cは光速である。PRFは、パルス繰り返し時間(「PRT」:pulse repetition time)と相互に関連するかもしれない。一義的に決まる最大速度は次のような式を用いて決定されるだろう。
【0013】
【数2】
【0014】
vaはナイキスト速度として参照されてもよい。va及びraの間には、次のような式により表されるように、任意の波長において積が一定となるような、相反するトレードオフが存在しうる。
【0015】
【数3】
【0016】
このことは、大抵レンジ・ドップラージレンマ(range-Doppler dilemma)と呼ばれる結果を生じる。一義的な長距離の測定を実現するために選択されたPRFは、一義的な高い速度の測定を実現するためには良くない選択となるであろう。
【0017】
単一のドップラーレーダを用いる、レンジ・ドップラージレンマを部分的に回避するためのいくつかの公知の方法があるが、当該方法はレーダにおいてより高度な装置を伴いうる。さらに、これらの方法の使用はドップラージレンマの回避に役立つが、他の問題を解決しない。例えば、高い速度の測定結果(即ち、60m/s以上、あるいは100m/sに相当する)が、高周波数における送信に要求されうる。これは、より高価な装置を一般的に必要とする。
【0018】
故に、距離と速度の曖昧性の問題を解決可能な方法、システム及びデバイスが必要である。特に、一義的な距離測定を維持し、既存の低コストのレーダデバイスも使用しながら、高い速度を測定可能なシステムが必要である。
【0019】
故に、特定の実施形態では、距離と速度の曖昧性の解決において、高い速度の測定を可能としつつ、単一パルスドップラーレーダの制限を打開する手段及び技術を提供する。実施形態は、反射率及び速度の少なくともいずれかのような、降水媒体の潜在的な固有特性がネットワーク環境において一定である原理を使用しうる、ネットワーク化された波形システム(networked waveform system)を含む。距離及び速度における曖昧性は、複数のレーダからのデータを交えて環境の正確な測定を行うために、ネットワーク上の複数のレーダからの測定結果を統合処理することによって解決されるであろう。
【0020】
ネットワーク化された波形システムは、以下を含む多くの利点を提供しうる。しかしながら、波形システムの利点は、以下に限定されない。1つ目は、距離及び速度の曖昧性が単一のレーダの波形信号において連結されているのに対し、距離の曖昧性及び速度の曖昧性を互いに分離しうることである。2つ目は、ネットワーク波形信号(または分散型波形信号)は、100m/sを超える速度を含む、60m/sを上回る速度を測定するために設計されうることである。いくつかの実施形態では、ネットワーク波形信号は、複合波形信号、及び互いのノードにおける高度な処理を必要とせずに設計される。このことは、それぞれのノードにおける計算負荷を最小化しうる。3つ目は、ネットワーク波形信号は、複合波形信号を有する非常に高価な単一レーダシステムに対抗するように、複合波形信号をサポートするために限られた能力を有し得る、低コストの送信機が用いられてもよいことである。4つ目は、ネットワーク化された波形システムは、ネットワークにおける個々のレーダノードの制限により限定されることなく、カバー領域において特定の要求を満たすように設計されてもよいことである。5つ目は、ネットワーク波形信号は、暴風雨構造の運動学的解析に用いられうる、エイリアスのない(dealiased)風系場の推定を導出することを可能にするかもしれないことである。
【0021】
実施形態に係るネットワーク化された波形システム100の基本的な構造は、図1に示される。当該図において、及び以下に示された記載の大半において、ネットワーク化された波形システムは、複数のレーダ110−a、110−b、・・・、110−nを有する。システム100は、例えば、4つのレーダ110−a、110−b、110−c、及び110−nを示す。特定の数のレーダを用いて示された図は、例示的な目的で提供されたものであり、限定を目的としたものではない。任意の複数のレーダを有するシステムについて、以下に記載された方法及びシステムを拡張する方法は、本技術分野に属する当業者にとっては明確であろう。
【0022】
システム100は、複数のレーダ110がそれぞれ、異なる地理的位置に位置する異なるレーダ110によるレゾリューションボリューム(resolution volume)130において、同一の事象についての実質的な同時観測がなされるように、ビーム120−a、120−b、・・・、120−nを生成可能であることを示している。例えば、視線速度はそれぞれのビーム120の経路において、それぞれのレーダ110により測定されうる。それぞれのレーダ110によりなされる測定は、それぞれのレーダ110がそれぞれのビーム120の方向において測定するため、異なるものと考えられる。さらに、環境における1つの位置における測定結果は、ビーム120の経路上の異なる点について、実質的に関連しているデータを含みうる。また、速度の測定結果において、レーダ110の一義的な最大速度よりも高い速度が測定結果に内包される(folded)、あるいはエイリアスされる場合、測定結果にはエイリアシングが生じる。しかしながら、個々のビーム120の測定結果が異なる値であるにも関わらず、ベクトル速度のような実際のパラメータあるいは固有パラメータは、任意の点、あるいは空間のレゾリューションボリュームという点で同一となるであろう。ネットワーク化された波形システムは、速度のような環境の潜在的な固有パラメータがネットワーク環境において一定である原理を用いる。反射率の測定結果を含む他の測定結果はそれぞれのビーム120でなされうる。なお、当該他の測定結果は反射率の測定結果に限定されない。
【0023】
複数のレーダ110は、コンピュータシステム(不図示)と通信してもよい。複数のレーダ110は当該コンピュータシステムとデータ通信をしてもよく、当該コンピュータシステムにおいてデータは処理されてもよい。複数のレーダ110はコンピュータシステムから命令を受けてもよい。いくつかの実施形態において、コンピュータシステムはレーダから遠く及び/または現地外に設置されていてもよい。コンピュータシステムはレーダ110と一体であっていてもよい。いくつかの実施形態において、複数のレーダ110は互いに通信してもよい。複数のレーダ110はネットワーク化されたレーダシステムの一部であってもよい。ネットワーク化されたレーダ環境において、N台のレーダノードは共同作業してもよい。N台のノードは、一体となって大気の測定を行う1つのシステムとしてみなされてもよい。
【0024】
複数のレーダ110は様々な種類のレーダであってよく、異なる実施形態において異なる周波数で動作してもよい。複数のレーダ110は、以下のような、しかしながら以下に限定されない異なる周波数帯をカバーするレーダを含んでもよい。複数のレーダ110は、波長が約9〜15cmに対応し、周波数2〜4GHzで動作するSバンドレーダ、波長が約4〜8cmに対応し、周波数4〜8GHzで動作するCバンドレーダ、波長が約2.5〜4cmに対応し、周波数8〜12GHzで動作するXバンドレーダ、及び波長が約0.75〜2.5cmに対応し、周波数12〜40GHzで動作するKバンドレーダを含んでもよい。場合によっては、及び他の例では、異なるレーダは実質的には異なる周波数で動作してもよい。1つの例示的な実施形態では、レーダ110は全てXバンドレーダを含んでもよい。
【0025】
複数のレーダ110は、送信機と受信機の両方の構成を含み得るモノスタティックレーダを含んでもよい。いくつかの実施形態では、複数の送信機及び複数の受信機の少なくともいずれかを有するレーダ110を含んでもよい。1つの実施形態において、1つのレーダ110は、水平偏波用及び垂直偏波用の2つの送信機、及び水平偏波用及び垂直偏波用の2つの受信機を含んでもよい。いくつかの実施形態では、アナログ受信機を有するレーダ110を含んでもよい。いくつかの実施形態では、デジタル受信機を有するレーダ110を含んでもよい。いくつかの実施形態では、受信機を有するが送信機を有さないレーダ110を含んでもよい。いくつかの実施形態では、送信機を有するが受信機を有さないレーダ110を含んでもよい。いくつかの実施形態では、バイスタティック受信モード(bistatic receive mode)、あるいは干渉法(interferometric)モードのような、複数のモードで動作するレーダ110を備えてもよい。
【0026】
複数のレーダ110は、様々な種類のレーダを含んでもよい。レーダ110は、ドップラーレーダを含んでもよい。レーダ110は、パルスごとに送信された波の偏向、及びパルスごとの戻り波から受信された偏向状態を制御する、偏向能力を有してもよい。いくつかのレーダは単一偏向、あるいは二重偏向能力を有してもよい。単に一例として、偏向レーダは限定されることなく、以下の構成を含んでもよい。偏向レーダは、切替型二重偏波(switched-dual polarization)、二重チャネル二重偏波(dual-channel dual-polarization)、及び切替型二重チャネル偏波アジャイルレーダ(switched dual-channel, polarization-agile radar)を含んでもよい。
【0027】
複数のレーダ110は、異なる能力を有してもよい。複数のレーダ110は最小限の処理能力を有するレーダを含んでもよい。複数のレーダ110は、デューティサイクルにおける制限された敏捷性及びサポートされた波形信号を有するレーダを含んでもよい。レーダ110は、低コストのレーダを含んでもよい。デューティサイクルにおいて制限された敏捷性、及び複合波形信号をサポートする能力を有するレーダは、レガシーレーダ(legacy radar)として言及されてもよい。単に一例として、1つの例示的な実施形態では、複数のレーダ110はXバンドマグネトロンレーダ(X-band magnetron radar)を含んでもよい。いくつかの実施形態では、複数のレーダ110は、デューティサイクルにおけるより高い敏捷性、及び複合波形信号をサポートする能力を有するとともに、高度な処理能力を有するレーダを含んでもよい。複数のレーダ110は、マグネトロン、半導体、クライストロン、進行波管、及びマイクロ波電力モジュール送信機を有する送信機を含んでもよい。しかしながら、当該送信機は上述の構成に限定されない。
【0028】
いくつかの実施形態では、単一の一様なパルス繰り返し周波数の波形信号を送信しうる複数のレーダ110を含んでもよい。いくつかの実施形態では、複数のパルス繰り返し周波数の波形信号を送信しうる複数のレーダ110を含んでもよい。いくつかの実施形態では、複数のレーダ110のサブセットは、それぞれ少なくとも2つのパルス繰り返し周波数を有する波形信号を送信しうる。単に一例として、第1のレーダ110−aはPRFを有する波形信号を送信し、第2のレーダ110−bは2つのPRFを有する波形信号を送信し、そして第3のレーダ110−cは3つのPRFを有する波形信号を送信しうる。複数のレーダ110が送信するパルス繰り返し周波数は、いくつかの実施形態にでは、それぞれのレーダにおいて同一であってもよい。いくつかの実施形態では、他のレーダ110とは異なるパルス繰り返し周波数を有する波形信号を送信するレーダ110を含んでもよい。ネットワーク化された波形システムは、ネットワーク波形信号において、例えば2対3の比率のような有理数(あるいは分数)の形p/(p+1)として特定される異なるパルス繰り返し周波数を要求しなくてもよい。ここでpは、0ではない正の整数である。単に一例として、ネットワーク波形信号は1.6kHz及び1.84kHzのパルス繰り返し周波数を含んでもよい。
【0029】
複数のレーダ110は、複数のレーダのネットワークの一部であってもよい。複数のレーダのネットワークは、ネットワーク化されたレーダシステム(「NETRAD」:networked radar system)としてしばしば言及されうる。複数のレーダのネットワークは地理的に分散型複数のレーダを含んでもよい。ネットワーク化されたレーダシステムは、重複するカバレッジを有する複数のレーダを含んでもよい。レーダネットワークは、プロセッサ及び制御器を有するコンピュータシステムと通信してもよい。制御器は複数のレーダへネットワーク波形信号(または分散型波形信号)を送信するために用いられてもよい。プロセッサはレーダネットワークから受信したデータを処理するために用いられてもよい。複数のレーダ110は、ネットワーク制御可能であってもよい。いくつかの実施形態では、少なくとも1つのレーダ110は、コンピュータシステム機能性を含む、及びコンピュータシステムと一体である、の少なくともいずれかであってよい。複数のレーダ110を含むシステムの一部であるコンピュータシステムは、以下で詳細に説明する。
【0030】
図2は、システム100の一例であるネットワークレーダのシステム200の実施形態を示している。それぞれのレーダ110−a、110−b、110−c、・・・、110−nはレーダ波形信号220−a、220−b、220−c、・・・、220−nを送信していることが示されている。それぞれのレーダ波形信号220は、レゾリューションボリューム130に向けられている。波形信号220の信号は、レゾリューションボリューム130で散乱され得る。220−aのような波形信号は、レーダ110−aに向けてレゾリューションボリューム130において後方散乱され得る。いくつかの実施形態において、レゾリューションボリューム130において散乱された波形信号220は、波形信号を送信したレーダに加え、他のレーダで受信される。レーダ波形信号220はネットワーク波形信号Uの一部であるとみなされてもよい。さらに単一のネットワーク波形信号のシステムを考慮し、ネットワーク波形信号Uは、個々のレーダ110に関連づけられた個々のレーダ波形信号220の収集を含んでもよい。レーダ波形信号220は、パルス繰り返し周波数をそれぞれ含んでいてもよい。それぞれのレーダ波形信号220のパルス繰り返し周波数は、いくつかの実施形態で同一のものであってもよい。いくつかの実施形態では、異なるレーダ110は、異なるパルス繰り返し周波数を有するレーダ波形信号220を送信してもよい。いくつかの実施形態では、複数の波形信号を送信するレーダ110を含んでもよい。いくつかのレーダは、1以上のパルス繰り返し周波数を含む波形信号を送信してもよい。いくつかの実施形態では、異なる種類の波形信号の送信を伴ってもよい。
【0031】
図3はシステム100の一例である、複数のレーダ110を含むシステム300の実施形態を示している。システム300はネットワーク化されたレーダシステムであってよい。システム300はネットワーク化されたレーダシステムであってもよい。いくつかの実施形態では、システム300はネットワーク化された波形システムであってもよい。レーダ110−a、110−b、・・・、110−fは、レゾリューションボリューム130における、関連づけられた視線速度330−a、330−b、・・・、330−fを判定用のデータを収集するために用いられてもよい。視線速度330はレーダ110において、レーダ110から送信された波形信号及び後方散乱された信号の位相を比較することにより測定され得る。このことはそれぞれのレーダ110のために、環境におけるレゾリューションボリューム130内のドップラー速度を判定しうる。それぞれのレーダ110と当該レーダに関連づけられた視線速度330とは異なる方向を示しうる。本出願において説明されるシステム、方法及びデバイスを使用することにより、レゾリューションボリューム130の固有速度350は、ネットワーク環境において一定である固有特性に基づいて判定されうる。いくつかの実施形態では、固有速度350は水平面において定義された、2次元の速度であってもよい。いくつかの実施形態では、固有速度350は、3次元の速度であってもよい。単に一例として、レゾリューションボリューム130の固有速度350は、レーダ110のビーム方向上に投影された場合に、結果として得られる速度がレーダ110の視線速度330に相当すると判定してもよい。いくつかの例において、視線速度は内包されたた及び/またはエイリアスされた速度情報を含んでもよい。複数のレーダからの測定結果を用いることにより、固有速度は、以下で詳細に記載される最適化等の異なる技術に基づいて判定される。
【0032】
いくつかの実施形態では、システム300はレゾリューションボリューム(例えば図1に示されたレゾリューション130)の状態の異なる測定を行うために用いられてもよい。単に一例として、反射率が測定されてもよい。本出願に記載されたシステム、方法、及びデバイスを用いることにより、上述した速度についてと同様にレゾリューションボリューム130の固有反射率が判定されてもよい。レーダ110はレゾリューションボリューム130の反射率に関する情報を受信してもよい。レゾリューションボリューム130の固有反射率は、レゾリューションボリューム130の固有反射率がレゾリューションボリューム130において一定であることに基づいて判定されてもよい。レーダ110のいくつかの反射率の測定結果は、重複エコー(overlaid echo)からのデータのエイリアシング及び/または内包、またはビームの減衰等の他の要因に依存して異なりうるため、固有反射率はデータの統合処理、及び複数のレーダ測定結果で正確な反射率の判定により判定されうる。第2のトリップ信号あるいは重複エコーは、データ品質を劣化させる不要なエコーを含むかもしれない。このことは、すでに送信されたパルスについて受信された信号により引き起こされうる。
【0033】
ここで、レーダ測定結果の曖昧性を解決するために複数のレーダを使用する方法400の実施形態について、図4を用いて説明する。方法400は、図1のシステム100のようなシステムにおいて実装されうる。
【0034】
ブロック410において、複数のレーダ波形信号は、複数のレーダから送信される。当該複数のレーダは、環境の異なる位置に配置されうる。いくつかの実施形態では、複数のレーダ波形信号は、ネットワーク波形信号を構成してもよい。複数のレーダはネットワーク化されたレーダシステムの一部であってもよい。ネットワーク波形信号は、いくつかの実施形態では分散型波形信号としても言及されてもよい。それぞれのレーダ波形信号は、複数のレーダ内の1つの特定のレーダから送信されうる。
【0035】
レーダ波形信号はパルス繰り返し周波数を含みうる。いくつかの実施形態では、1つのレーダは追加のパルス繰り返し周波数を含んでもよい、単一及び/または複数の波形信号を送信しうる。いくつかの実施形態では、それぞれのレーダは同一のパルス繰り返し周波数を含む波形信号を送信しうる。いくつかの実施形態では、1以上のレーダは、異なるパルス繰り返し周波数を有するレーダ波形信号を送信しうる。
【0036】
いくつかの実施形態では、方法400は特定のレーダ波形信号を送信するために、複数のレーダへの送信命令を含んでもよい。送信された命令は、特定のネットワーク波形信号を送信するための命令を含んでいてもよい。いくつかの実施形態では、特定の種類の測定を実行するように決められた特定のネットワーク波形信号を含んでもよい。単に一例として、特定のネットワーク波形信号は、竜巻検出、暴風、追跡、及び水文地質学等の目的の用途に併せて決められてもよい。1つの例示的な実施形態では、複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、ある値よりも大きい風速の測定をサポートするために決められてもよい。単に一例として、複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、60m/s、70m/s、80m/s、90m/s、100m/s、110m/s、120m/s、130m/s、及び140m/s以上の速度測定をサポートしうるレーダデータを供給するように決められてもよい。1つの特定の実施形態では、100m/s程度の速さの速度の測定結果は、個々に25m/s未満の速度測定をサポート可能な、複数のレーダ波形信号を有するネットワーク波形信号を用いて判定されうる。複数のレーダ波形信号及びネットワーク波形信号の少なくともいずれかは、個々のレーダ波形信号またはレーダ自身が高速度測定をサポート可能な特異なデータを提供できない場合であっても、これらの速度以上の速度測定をサポートするように決定され得る。
【0037】
いくつかの実施形態では、ネットワーク波形信号は以下のような式により示されてもよい。
【0038】
【数4】
ここで、
はk番目のレーダにおいて送信された信号を示すベクトルqk×1であり、k番目のレーダそれぞれは、送信波形信号qkを有してもよい。ネットワーク化された波形システムの規模Mは、以下のような式により定義される。
【0039】
【数5】
【0040】
本発明の精神を逸脱せずに、ネットワーク波形信号あるいは複数の波形信号を数学的に示す他の方法の存在は、本技術分野に属する当業者により理解されるであろう。
【0041】
ネットワーク化されたレーダシステムのカバレッジ内の媒体は、ネットワーク波形信号Uを用いて測定されうる。当該媒体の固有特性はUを用いてなされる測定結果において終始一貫していてもよい。速度及び反射率を含むがそれに限定されない測定結果は、送信された波形信号Uを用いてなされてもよい。Uを用いる、それぞれのレーダにおけるエイリアスのない速度は、例えば方法400の他のブロックで説明されるように判定されうる。
【0042】
ブロック420において、複数のレーダからの出力データは受信されうる。出力データは、送信された複数のレーダ波形信号の結果として得られる。いくつかの実施形態では、出力データは送信されたネットワーク波形信号の結果として得られる。いくつかの実施形態では、出力データはネットワーク波形信号から受信された、個々のレーダの信号及びデータ結果が考慮されてもよい。出力データは、いくつかの実施形態において生データであってもよい。いくつかの、全ての出力データを受信するコンピュータシステムが実行する処理のような、レーダの能力及び他の要因に依存するいくつかのレーダによるデータ処理を含んでもよい。出力データは、受信された出力のような反射率の測定結果に関するデータを含んでもよい。出力データは、レーダ波形信号及びネットワーク波形信号の少なくともいずれかのような、受信した後方散乱信号と送信された信号の位相間の位相シフトを反映するデータのような速度の測定結果に関するデータを含んでもよい。いくつかの実施形態では、複数のレーダからの出力データがネットワーク波形信号の送信結果であると判定されてもよい。
【0043】
いくつかの実施形態では、コンピュータシステムは出力データを受信してもよい。コンピュータシステムは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令を有する処理コードを含んでもよい。方法400で用いられ得るコンピュータシステムについては、以下で詳細に説明される。
【0044】
いくつかの実施形態では、少なくともエイリアスされたデータサブセットを有する出力データを含んでもよい。上述したように、単一のパルス繰り返し周波数を有する波形信号を送信する単一のドップラーレーダは
等の式により決定される一義的な距離を判定しうる。ここで、cは光速である。パルス繰り返し周波数の周期的性質に起因して、整数倍raにより分離された環境の測定量が、単一のパルス繰り返し周波数を用いて微分可能であるように、データはエイリアスまたは内包されてもよい。このことはデータ測定を曖昧にしうる。同様に、一義的な最大速度は次のような式
により決定され得、内包及びエイリアシングの少なくともいずれかは、送信されたレーダ及び/またはネットワーク波形信号がvaより高速で動く速度の測定がなされる場合に生じうる。以下のブロックは、複数のレーダからの出力データを、環境の正確な測定結果を判定するためのエイリアス除去、及び/または拡張データを判定するために、統合して処理してもよい。
【0045】
ブロック430で、複数のレーダからの出力データは、統合処理され得る。以下に説明するコンピュータシステムは、いくつかの実施形態においてデータを統合処理してもよい。出力データは、データにおける曖昧性を解決するために統合処理されてもよい。出力データは、環境の正確な測定を判定するために統合処理されてもよい。環境の正確な測定結果は、環境内の測定された体積要素(volume element)及びレゾリューションボリュームの固有速度または固有反射率のような、環境の本質的な測定結果を反映してもよい。環境の正確な測定結果は、環境の一義的な測定結果であってもよい。データの統合処理は、既知の送信された複数のレーダ波形信号、及び/またはネットワーク波形信号に依存しうる。出力データの処理、及びその後のブロック440における環境の測定結果の判定は、反射率及び/または速度等、測定されている媒体の潜在的な固有特性がネットワーク環境において一定である原理に依存してもよい。ネットワーク波形信号は、複数のレーダのカバー領域における観測の曖昧性を解決するために構成されてもよい。複数のレーダからの出力データは、位置、距離、ビーム方向、及び異なるレーダからのデータを同期させるための時間情報の少なくともいずれかを含んでもよい。レーダ間の干渉性も、通常のGPSかネットワークを介した他の手段のいずれかにより維持されてよい。いくつかの実施形態では、出力データは、当該出力データが送信されたネットワーク波形信号の結果として得られたものであるか否かを判定するために処理されてもよい。
【0046】
単に一例として、複数のレーダからの出力データの統合処理は、複数のレーダからの測定されたドップラー速度に関連する出力データに、デカルト座標系の風系場を関連づける処理を含んでもよい。デカルト座標系の風系場、及び測定されたドップラー速度は、次のような式を介して互いに関連づけられてよい。
【0047】
【数6】
ここでCkは階数pのN×M組み合わせマトリックスであり、Nは複数のレーダのうちの測定結果のためのデータを提供するレーダの数であり、Mはネットワーク化された波形システムの次元、あるいは複数のレーダにより送信された波形信号の数であり、
は測定されたドップラー速度ベクトルであり、Gはデカルト座標系の風系場、及び複数のレーダノードにおいて測定されたドップラー速度に関連する次のような幾何学変換であり、
【0048】
【数7】
そして
はデカルト座標系の風系場のベクトルである。Ckは要素が0及び1であるマトリックスであってよい。Ckは、ネットワーク波形信号Uの列数により形成されるN組に基づいて、構成要素を1あるいは0に設定することにより構成されてもよい。pはUの実行できるN組の総数である。
の要素はエイリアスされた速度であるから、u(k)(及びv(k))における誤差は大きくなりうる。
【0049】
上述したシステムは、ネットワークの一貫性の強制により、曖昧性が解決されうる。速度の曖昧性は、風系場の直接推定により解決されうる。当該解決は、次のような最適化問題を解くことによりされうる。
【0050】
【数8】
は、要素が水平面における速度成分である風ベクトルであり、
は取得された風速ベクトルである。推定された風速ベクトルは、以下の式により得られる、それぞれのレーダノードにおける拡張視線速度を得るために用いられ得る。
【0051】
【数9】
【0052】
いくつかの実施形態では、風速ベクトル
は暴風雨における運動学を調査するためのマルチドップラー解析(multi-Doppler analysis)において用いられる。故にいくつかの実施形態では、暴風雨構造の運動学解析のためにいくつかの実施形態で用いられ得るエイリアスのない風系場は判定されうる。いくつかの実施形態では、竜巻に関連する剪断特性(shear feature)の検出のために、
を用いてもよい。
【0053】
ブロック440は、
及び/または
のような環境の測定結果が、処理された出力データから判定されうることを示している。反射率の測定結果を含むがこれに限定されない他の測定結果は、いくつかの実施形態において、体積要素における媒体の潜在的な固有反射率がネットワーク環境において一定である原理を用いてなされてもよい。
【0054】
環境内の地点における速度及び反射率等の、環境の正確な測定結果を判定するための曖昧性を解決するための他の方法がある。単に一例として、測定されたドップラー速度における曖昧性を解決するための方法のバリエーションは、次のような式により与えられるデカルト座標系の改良された風系場を用いることにより求められうる。
【0055】
【数10】
ここで、Vはそれぞれのレーダノードにおける波形信号から得られたナイキスト補正要素(Nyquist correction element)(2va)であり、nは整数のベクトルである。クラスタリング問題(clustering problem)は次のような式を用いて解かれうる。
【0056】
【数11】
ここで、
はu(k)の平均である。地点u(k)の近接するクラスタを形成するnの値は、解
である。解
が得られると、正確な速度は、ナイキスト補正要素から得ることができる。拡張速度は、次のような式で得ることができる。
【0057】
【数12】
【0058】
これらの方法は、反射率及び速度のような媒体の潜在的な固有特性がネットワーク環境において一定である原理に基づいて、複数のレーダからの出力データにおける曖昧性を解決するための方法である二例を提供する。複数のレーダからの出力データに基づいて環境の正確な測定結果を判定するために、当業者が理解するであろう本発明の精神の他の方法が用いられてもよい。
【0059】
方法400、及びシステム100、200、及び300に関連して述べられた方法及びシステムは、個々のシステム要素がどのように分離されてあるいはより一体化されて実装されるかを概略的に示した図5に図示されるような、コンピュータシステム500を用いることにより、一部分が実装されてもよい。システム500は、バス526を解して電気的に連結されたハードウェア要素を備えて示されている。ハードウェア要素は、プロセッサ502、入力デバイス504、出力デバイス506、記憶デバイス508、コンピュータ読み取り可能記録媒体リーダ510a、通信システム514、DSPや専用プロセッサ等の処理加速ユニット516、及びメモリ518を含みうる。コンピュータ読み取り可能記録媒体リーダ510aは、コンピュータ読み取り可能記録媒体510bにさらに接続されてもよい。当該接続は、コンピュータ読み取り可能情報を含む、リモート、ローカル、固定、及び着脱可能な記憶デバイスの少なくともいずれかに加えて、一時記憶及び/または恒久記憶記録メディアを統合的に表す。通信システム514は、有線、無線、モデム、及び他の種類の接続インタフェースの少なくともいずれかを含み、レーダから収集されたデータを許容する。場合によっては、このようなデータ収集は、環境の固有特性の評価において、通信システムにより実時間で実行されてもよい。
【0060】
システム500は、図ではワーキングメモリ520に配置されるものとして示された、発明の方法を実装するために設計されたプログラム等の、オペレーティングシステム524及び他のコード522を含みうるソフトウェア要素を含んでもよい。単に一例として、システム500は複数のレーダからのデータを受信するための命令、及び環境の測定結果を判定するためのデータを統合処理するための命令を含みうる処理コードを含んでもよい。いくつかの実施形態では、処理コードは、複数のレーダより得られたデータから正確な測定結果を判定するための命令を含んでもよい。いくつかの実施形態では、処理コードは複数のレーダからのデータをエイリアス除去及び拡張の少なくともいずれかを行ってもよい。様々なバリエーションが特定の要求に関連して用いられてもよいことは、同一の技術分野に属する当業者にとっては明らかであろう。例えば、カスタマイズされたハードウェアが使用される、及び/または特定の要素がハードウェア、ソフトウェア(アプレット等の携帯用ソフトウェアを含む)、あるいはその両方において実装されてもよい。さらに、ネットワーク入出力デバイスのような、他の計算デバイスへの接続が使用されてもよい。
【0061】
次に記載されるネットワーク化された波形システムの性能を評価するための特定のシミュレーション及び実際の試験は、発明者により既に実施された。追加の実施形態は、以下の記載により理解されるだろう。
【0062】
シミュレーションは、様々な実施形態に関連する3台のレーダのネットワークが配置された。図6A乃至Cにおいて、非常に激しい風を測定するために設計されたネットワーク化された波形システムを用いて推定された、1つの実施形態のドップラー速度のヒストグラムが示されている。30dBZ規模のレゾリューションボリュームを有する3つのノードレーダネットワークにより測定されたドップラー速度は、100m/s(>220mph)より大きい。本シミュレーションにおいて、毎秒113メートルの速度が測定された。今のところ、図6A乃至Cに示す、個々のレーダの測定可能な最大のドップラー速度は、25m/s未満である。高速度を測定するためのネットワーク波形信号の設定は、KCYRのu1、KSAOのu2、及びKRSPのu3を有するネットワーク波形信号Uが含められた。u1の波形信号は1.6kHz及び2.08kHzのパルス繰り返し周波数であり、u2の波形信号は1.76kHz及び2.24kHzのパルス繰り返し周波数であり、u3の波形信号は1.92kHz及び2.4kHzのパルス繰り返し周波数である。シミュレーションにおけるレーダ配置は、さらに次で説明される。
【0063】
図6D乃至Fは、1つの実施形態において複合波形信号をサポート不可能な、低コスト送信機のために設計されたネットワーク化された波形システムから得られたドップラー速度のヒストグラムを示している。シミュレーションは、オクラホマ州南部の現在の大気強調測定センター(「CASA」) IP−1の、シリルに位置するレーダ(「KCYR」)、チカシェーに位置するレーダ(「KSAO」)、ラッシュスプリングスに位置するレーダ(「KRSP」)により実行された。レーダは、4m/sのスペクトル幅において動作し、40m/sより大きい速度が測定されうる観測能力を有する。図6Dは、シリルに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。図6Eは、チカシェーに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。図6Fは、ラッシュスプリングに位置するネットワーク化された波形システムから推定されたドップラー速度のヒストグラムを示している。
【0064】
図7A乃至Dは、制限された敏捷性の送信機を有する1つの実施形態のマグネトロンレーダシステムのネットワークにより観測される、シミュレートされた竜巻の循環特性を示している。シリルのレーダにおいて得られたドップラー速度は、測定された速度は多数の内包を示しているが、40m/s以上においては、内包のない実際の速度と一致する。図は、シリルから60km離れた、竜巻の循環特性のシミュレーション結果を示している。図7Aは、シリルのレーダにおいて測定された反射率のシミュレーション結果を示している。図7Bは、シリルのレーダにおける実際のドップラー速度のシミュレーションを示している。図7Cは、シリルにおける測定されたドップラー速度のシミュレーションを示している。図7Dは、ネットワーク化された波形システムを用いてシリルにおいて得られた、シミュレートされたドップラー速度を示している。
【0065】
図8A乃至Dでは、広範囲にわたってSバンドレーダにより観測された実際の反射率が、1つの実施形態の短距離レーダの観測のシミュレートのために用いられる。4つのノードにおける反射率は、図8A、B、C、及びDにみられるように、空間的に独立した重複エコーにより品質が劣化している。図8E及びFは、得られた反射率が重複エコーを有さず、1つの実施形態に係る4つのノードのレーダネットワークのカバー領域において実際の反射率と非常に一致していることを示している。図8Aは、チカシェーにおいて測定された反射率を示している。図8Bはラッシュにおいて測定された反射率を示している。図8Cはシリルにおいて測定された反射率を示している。図8Dは、ロートンにおいて測定された反射率を示している。図8Eは、実際の反射率を示している。図8Fは、ネットワーク波形信号から得られた反射率を示している。
【0066】
これらのシミュレーションにおいて、速度拡張誤差は風速ベクトル及び分散型波形構造により決定され得る。ノードにおいて測定されたドップラー速度は、特定のレゾリューションボリュームにおける、風速及び風向の関数に正比例しうる。図9は、1つの実施形態に係るIP1ネットワークの3つのノードの中間にある、特定のレゾリューションボリュームの風速及び風向の関数としての速度拡張誤差を示している。レゾリューションボリュームはシリルのレーダから方位角60度の方向に20kmの地点に位置する。1m/sの非常に高い変化が、速度誤差分布に用いられた。図9において非常に高い速度拡張誤差を有する領域は、ノードにおける視線速度が波形信号のナイキスト速度により近い状況において発生する。しかしながら、高い誤差を有する領域は、エラーが5%以下、及び全体の速度拡張誤差が3.5%である領域よりもより小さい。この限定は、推定された風系場における空間フィルタを実行することにより減らされうる。また、高いエラーを有する領域は、より限られた誤差分散が用いられる場合に減らされうる。平均誤差は、風速及び風向を変化するためのレゾリューションボリュームについて得られるかもしれない。平均拡張誤差は、レーダネットワーク内のレゾリューションボリュームの位置の関数である。
【0067】
図10Aは、1つの実施形態に係る3つのレーダノードを用いたネットワーク波形信号の平均拡張誤差を示している。レーダの基線に沿ったエラーが高くなりうることが、図10Aにおいてみられる。基線領域における高い誤差を推定するための1つの手段は、より多いレーダノードを有するネットワーク波形信号を有することである。例えば、図10Bは1つの実施形態に係る、4つのレーダノードが実装されたネットワーク化された波形システムを示している。シリルとラッシュスプリング間のベース誤差が低減されたことが、図10Bにおいてみられる。故に、大きく、密度の高いレーダネットワークにおいて、基線上のより高い誤差は、ネットワーク化された波形システムを用いることにより低減されうる。
【0068】
非常に高いドップラー速度を測定するためのネットワーク化された波形システムの能力を解析するために、発明者によってなされたシミュレーションは、竜巻が存在する水平風系場のモデルに、ランキンモデル(Rankine model)(ウッド,V.T.及びR.A.ブラウン、“対称性を有する回転軸及び発散場の単一ドップラー速度定数におけるレーダ近傍の効果(Effects of radar proximity on single-Doppler velocity signatures of axis symmetric rotation and divergence.)”、1992年、月刊気象レビュー(Monthly Weather Review)、p.120, 2798ー2807)が使用されてなされたものであり、1つの実施形態に係るネットワーク環境において測定された速度分散をシミュレートするために用いられ得る。レーダノードにおいて測定されるドップラー速度は、次の式により得られる。
【0069】
【数13】
ここでvrは視線速度のピークであり、vtは渦の範囲の中心における正接速度のピークである。rc、rp、及びrvはレゾリューションボリューム及び渦の中心それぞれのレーダ距離である。θp及びθvは、レゾリューションボリューム及び渦の中心それぞれの方位角であり、そしてrは渦の中心からレゾリューションボリュームの距離である。シミュレーションでは
【0070】
【数14】
であるものとする。
【0071】
ドップラー速度の距離特性は、Uのようなネットワーク波形信号により得られた測定結果を有するネットワークレーダ環境における1m/sの変化を伴う、上位のランキンモデルの式に基づいてシミュレートされてもよい。1つの実施形態において、偏向されていない60m/sの速度が、図11Bに示されるような許容可能な標準偏差を有して測定可能であることは、図11Aにみられる。ネットワーク波形信号を用いるネットワークレーダ(「NETRAD」)読み出しの標準偏差は、1.5m/s未満である。図11Cは、1つの実施形態において、シリルにおけるNETRAD読み出しでの拡張誤差を示している。60m/sの速度の測定結果であるが、拡張誤差は5%未満である。図11に示される結果に用いられたネットアーク波形信号Uは、低コストハードウェア用に設計された。本例では、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0072】
Uは、±100m/sの速度、いくつかの実施形態ではさらに高い速度を測定するために設計されてもよい。例えば、本シミュレーションにおいて、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び2.08kHzのPRFを含み、u2の波形信号は1.76kHz及び2.24kHzのPRFを含み、u3の波形信号は1.92kHz及び2.4kHzのPRFを含んだ。図7A乃至Dに参照を戻す。図7の図は、シミュレーションに基づくIP1の領域においてシミュレートされた、竜巻の循環のドップラー速度の測定結果を示している。IP1レーダネットワークを使用したネットワーク波形信号シミュレーションは、1度の仰角を有する。図7A及びBは、シリルにおけるノード波形信号を用いた測定結果を示しており、図7Aは1.6kHzと同一のパルス繰り返し周波数を用いて測定された速度を示しており、図7Bは1.84kHzのパルス繰り返し周波数を用いて測定された速度を示している。図7Cは、シリルにおける実際のドップラー速度を示している。ネットワーク波形信号の読み出しは図7Dに示さており、ネットワーク波形信号読み出しが±60m/s周辺の速度を測定可能であることがみられる。
【0073】
ネットワーク化された波形システムは、1つの実施形態において使用可能な4つのノードのレーダネットワークにより収集されたデータを用いて発明者により実験された。第1世代CASAレーダネットワークはオクラホマ州に展開され、当該レーダネットワークは、上述したシミュレーションにおいてもモデルとされた。ネットワーク化された波形システムは、低コストのXバンドレーダを含むIP1レーダネットワーク内に実装された。シリル、チカシェー、及びラッシュスプリングにある3つのノードのデータセットは、2008年3月31日17:50:32(UTC)において収集された。IP1レーダネットワークは1度の仰角で設置された。図12A乃至Dは、1つの実施形態に係る分散型波形信号を使用するシリルのレーダにおけるネットワーク読み出しの平面位置表示器(「PPI」:plan position indicator)を示している。測定されたドップラー速度は、図12A及びBに示される。図12Aにおいて、シリルで測定された速度は、1.6kHzのパルス繰り返し周波数でなされたものである。図12Bにおいて、シリルで測定された速度は、1.84kHzのパルス繰り返し周波数でなされたものである。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は図12Cに示される。図12Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。適切なS/N比を有する領域において、分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。ドップラー速度は全く高くないが、ネットワーク化された波形システムのアプリケーションは、60m/s及び100m/sさえも超える、より高い速度を測定するために適用されうる。
【0074】
1つの実施液体に係るシリルのレーダにおける、ネットワーク読み出しの速度及び反射率が示された図13A及びBにおいて、実際の結果から得られる追加の情報も示されている。ドップラー速度及び反射率は、図13A及びBのそれぞれにおいて、方位角に対してプロットされる。
【0075】
図14A乃至Dは、1つの実施形態において、図12及び13について記載されたデータの別の視点を提供している。測定されたドップラー速度は、図14A及びBに示されている。図14Aにおいて、シリルで測定された速度は、1.6kHzのパルス繰り返し周波数でなされたものである。図14Bにおいて、シリルで測定された速度は1.84kHzのパルス繰り返し周波数でなされたものである。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は、図14Cに示される。図14Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。図14に示された測定結果のために用いられたネットワーク波形信号Uは、低コストハードウェアのために設計された。本例では、ネットワーク波形信号Uは、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだ。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0076】
図15A乃至Dは、1つの実施形態に係る低コストのXバンドレーダを含む、IP1レーダネットワークにおいて実装された、ネットワーク化された波形システムによる追加の実験結果を示している。シリル、チカシェー、及びラッシュスプリングにある3つのノードのデータセットは、2008年6月17日16:08:44(UTC)において収集された。測定されたドップラー速度は、図15A及びBに示される。速度の内包は、測定された速度において容易に気づかれ得る。測定された反射率は図15Cに示される。図15Dは、分散型波形信号を用いた、シリルにおけるドップラー速度の読み出しを示している。適切なS/N比を有する領域において、分散型波形信号による読み出しが、エイリアスのない速度を提供しうることがみられる。IP1レーダネットワークを用いたネットワーク化された波形システムの実装は、KCYRにおけるu1、KSAOにおけるu2、KRSPにおけるu3を含んだネットワーク波形信号Uが用いられた。なお、u1の波形信号は1.6kHz及び1.84kHzのPRFを含み、u2の波形信号は1.68kHz及び1.92kHzのPRFを含み、u3の波形信号は1.76kHz及び2.00kHzのPRFを含んだ。
【0077】
回路、論理モジュール、ブロック、プロセッサ、及び他の要素の少なくともいずれかは、様々な動作を実行するために構成されているものとしてここでは記載された。同一の技術分野に属する当業者は、構成が設計、設置、相互接続、及び/または特定の要素のプログラムの実装により、また構成された要素が異なる動作を再構成可能であってもなくてもよいように実装されることにより達成され得ることを理解するだろう。例えば、プログラム可能なプロセッサは、適切な実行可能なコードを提供することにより構成され得る、専用の論理回路は論理ゲート及び他の回路素子に適切に接続することにより構成され得る、など。
【0078】
上述した実施形態は、特定のハードウェア及びソフトウェア要素を参照したが、同一の技術分野に属する当業者は、ハードウェア及びソフトウェア要素の少なくともいずれかの異なる組み合わせが用いられてもよいし、ハードウェアに実装されるものとして記載された特定の動作はソフトウェアまたはその他の手段に実装されてもよいことは、理解するだろう。
【0079】
本発明の様々な特徴を組み入れたコンピュータプログラムは、様々なコンピュータ読み取り可能な記録媒体に符号化されてもよい。適切な媒体は、磁気ディスクあるいはテープ、CDやDVDのような光学記録媒体、フラッシュメモリ等である。プログラムコードが符号化されたコンピュータ読み取り可能な記録媒体は、互換デバイスにパッケージされてもよいし、他のデバイスに分割されて提供されてもよい。さらにプログラムコードは符号化され、インターネットを含む様々なプロトコルに適合する有線及び/または無線ネットワークを介して送信されてもよく、これにより例えばインターネットダウンロード等の手段で配布してもよい。
【0080】
上述した記載は例示的な実施形態のみを提供するものであり、開示の範囲、適用性、または構成を限定する目的ではない。さらに、上述した例示的な実施形態では、1以上の例示的な実施形態の実装を可能にする説明を、同一の技術分野に属する当業者に対して提供するだろう。発明の精神及び範囲を逸脱することなく、様々な変更が要素の機能及び構成においてなされうることは理解される。本明細書にはいくつかの実施形態が記載された。様々な特徴は異なる実施形態に帰するが、1つの実施形態について記載された特徴は他の実施形態に組み込まれてもよいことは理解されるべきである。さらに、記載されたいかなる実施形態の特徴は、発明の全ての実施形態に重要であると考えられるべきであるが、発明の他の実施形態では、当該特徴は省略されてもよい。
【0081】
特定の詳細な記載は、実施形態の完全な理解を提供するために上述した記載では示された。しかしながら、実施形態はこれらの特定の詳細な記載に限定されることなく実行され得ることは理解されよう。例えば、不必要な詳細な記載により実施形態を不明確にしないために、ブロック図において回路が示されてもよい。別の事例において、実施形態を不明確にしないために不必要な詳細な記載ではなく、公知の回路、処理、アルゴリズム、構造、及び技術が示されてもよい。
【0082】
また、実施形態はフローチャート、フロー図、データフロー図、構造図、またはブロック図として表現された処理として記載されてもよいことに留意される。フローチャートは、順次的な処理としての実施について述べられているが、実施の多くは、平行または同時に実行されうる。さらに、実施の順番は変更されてもよい。処理は、図に示されない追加のステップを有しうるが、当該実施が完了した際に終了される。処理は、方法、関数、手順、サブルーチン、サブプログラム等に対応してもよい。処理が関数に対応する場合、当該処理の終了は、読み出し関数またはメイン関数への関数のリターンに対応する。
【0083】
さらに実施形態は、スクリプト言語、ミドルウェア、マイクロコード、ハードウェア記述言語、及びそれらのいかなる組み合わせ、の少なくともいずれかを用いる、ハードウェア及びソフトウェアの少なくともいずれかで実装されてもよい。ソフトウェア、ファームウェア、ミドルウェア、スクリプト言語、及びマイクロコードの少なくともいずれかに実装された場合、プログラムコードまたはコードは、記録媒体のようなコンピュータ読み取り可能な媒体に格納された必要なタスクを実行するために分裂する。コードセグメントまたはコンピュータ実行可能な命令は、手順、関数、サブプログラム、プログラム、ルーチン、サブルーチン、モジュール、ソフトウェアパッケージ、スクリプト、クラス、またはこれらのいかなる組み合わせ、データ構造、及びプログラムステートメント、の少なくともいずれかを表し得る。情報、データ、引数、パラメータ、及びメモリコンテンツの少なくともいずれかを通過及び受診することにより、コードセグメントは、他のコードセグメントまたはハードウェア回路と結合されてもよい。情報、引数、パラメータ、データ等は、メモリ共有、メッセージ通過、トークン通過、ネットワーク送信等を含む、適した手段を介して、通過、転送、送信されてもよい。
【0084】
1以上の実施形態の詳細な記載は上述されたが、発明の精神を変更することのない、様々な代替物、変更、及び相当物は、同一の技術分野に属する当業者に理解されるだろう。さらに、明らかに不適当あるいは他の明示的な記載を覘き、異なる実施形態の特徴、デバイス、構成要素の少なくともいずれかが代用される及び/または組み込まれてもよいことは、理解されるべきである。故に、上述した記載は、添付の請求項により定義される発明の範囲を限定するものとして理解されるべきではない。
【特許請求の範囲】
【請求項1】
レーダ測定結果の曖昧性を解決するためのネットワーク化された波形システムであって、
環境内の異なる地理的位置に配置され、ネットワーク波形信号を送信するように構成された複数のレーダであって、前記ネットワーク波形信号が、それぞれが前記複数のレーダのうちの特定のレーダにより送信される複数のレーダ波形信号を含む複数のレーダと、
プロセッサ及びメモリを有し、前記複数のレーダと一体となったコンピュータシステムであって、前記メモリが前記複数のレーダから受信したデータ、前記プロセッサにより処理されたデータ、及び前記プロセッサによって実行可能な処理コードを含む情報を格納するように構成されるコンピュータシステムと、を備え、
前記処理コードは、
送信された前記ネットワーク波形信号の結果として得られる、前記複数のレーダからの出力データを受信する命令と、
前記ネットワーク波形信号に基づいて、前記環境の測定結果を判定するために前記複数のレーダからの出力データを統合処理する命令と、
を含むことを特徴とするネットワーク化された波形システム。
【請求項2】
前記環境の測定結果を判定する命令は、
(
は測定されたドップラー速度ベクトル、
は風ベクトルであって、当該風ベクトルの成分は水平面における速度成分であり、Gは前記測定されたドップラー速度を前記風ベクトルと関連づける幾何学変換、
は得られた風速ベクトル)
により与えられる最適化問題の解決を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項3】
前記複数のレーダ波形信号のそれぞれのレーダ波形信号は、少なくとも1つのパルス繰り返し周波数を含むことを特徴する請求項1に記載のネットワーク化された波形システム。
【請求項4】
前記複数のレーダの少なくとも1つのサブセットが、少なくとも第2のパルス繰り返し周波数を含むレーダ波形信号を送信することを特徴とする請求項3に記載のネットワーク化された波形システム。
【請求項5】
前記処理コードは、特定のネットワーク波形信号を送信するための前記複数のレーダへの命令を送信する命令をさらに含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項6】
前記環境の測定結果は、速度の測定結果を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項7】
前記処理コードは、毎秒100メートルより大きい速度を判定するように構成されることを特徴とする請求項6に記載のネットワーク化された波形システム。
【請求項8】
前記環境の測定結果は、反射率の測定結果を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項9】
前記処理コードは、前記送信された波形信号がネットワーク波形信号であるかどうかを判定するように構成されることを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項10】
前記複数のレーダの少なくとも1つは、Xバンドレーダ、モノスタティックレーダ、及びマグネトロンレーダの少なくともいずれかであることを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項11】
前記処理コードは、エイリアスのない風系場を判定する命令をさらに含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項12】
環境内の異なる地理的位置に配置された複数のレーダから、複数のレーダ波形信号を送信する工程と、
送信された前記複数のレーダ波形信号の結果として得られる出力データを、前記複数のレーダから受信する工程であって、前記出力データの少なくとも1つのサブセットがエイリアスされている工程と、
前記複数のレーダからの前記出力データを統合処理する工程と、
処理された前記出力データから、エイリアスのない、前記環境の測定結果を判定する工程と、
を備えることを特徴とするレーダ測定結果の曖昧性を解決する方法。
【請求項13】
エイリアスのない、前記環境の測定結果を判定する工程は、
(
は測定されたドップラー速度ベクトル、
は風ベクトルであって、当該風ベクトルは水平面における速度成分であり、Gは前記測定されたドップラー速度を前記風ベクトルと関連づける幾何学変換、
は得られた風速ベクトル)
により与えられる最適化問題の解決を含むことを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項14】
前記複数のレーダ波形信号は、ネットワーク波形信号であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項15】
前記複数のレーダ波形信号のそれぞれのレーダ波形信号は、少なくとも1つのパルス繰り返し周波数を含むことを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項16】
前記複数のレーダの少なくとも1つのサブセットは、少なくとも第2のパルス繰り返し周波数を含むレーダ波形信号を送信するようにそれぞれ構成されることを特徴とする請求項15に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項17】
特定のネットワーク波形信号を送信するための前記複数のレーダへの命令を送信する工程をさらに備えることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項18】
前記エイリアスのない測定結果は、速度の測定結果であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項19】
前記エイリアスのない測定結果は、少なくとも毎秒100メートルの速度の測定結果であることを特徴とする請求項18に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項20】
前記エイリアスのない測定結果は、反射率の測定結果であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項21】
前記複数のレーダの少なくとも1つは、Xバンドレーダ、モノスタティックレーダ、及びマグネトロンレーダの少なくともいずれかであることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項22】
前記処理された出力データから、エイリアスのない風系場を判定する工程をさらに備えることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項23】
複数のレーダからネットワーク波形信号を送信する送信手段であって、前記ネットワーク波形信号が複数のレーダ波形信号を含む送信手段と、
送信された前記ネットワーク波形信号の結果として得られる、前記複数のレーダからの出力データを受信する受信手段と、
環境の測定結果を判定するために前記複数のレーダからの出力データを統合処理する処理手段と、
を備えることを特徴とするネットワーク化されたレーダシステム。
【請求項24】
複数のレーダからのレーダデータを用いて、少なくとも毎秒100m/sの速度を判定する工程であって、前記複数のレーダのそれぞれが100m/s未満の速度の測定をサポート可能な前記レーダデータを提供するように構成される工程を備えることを特徴とするドップラーレーダの測定方法。
【請求項1】
レーダ測定結果の曖昧性を解決するためのネットワーク化された波形システムであって、
環境内の異なる地理的位置に配置され、ネットワーク波形信号を送信するように構成された複数のレーダであって、前記ネットワーク波形信号が、それぞれが前記複数のレーダのうちの特定のレーダにより送信される複数のレーダ波形信号を含む複数のレーダと、
プロセッサ及びメモリを有し、前記複数のレーダと一体となったコンピュータシステムであって、前記メモリが前記複数のレーダから受信したデータ、前記プロセッサにより処理されたデータ、及び前記プロセッサによって実行可能な処理コードを含む情報を格納するように構成されるコンピュータシステムと、を備え、
前記処理コードは、
送信された前記ネットワーク波形信号の結果として得られる、前記複数のレーダからの出力データを受信する命令と、
前記ネットワーク波形信号に基づいて、前記環境の測定結果を判定するために前記複数のレーダからの出力データを統合処理する命令と、
を含むことを特徴とするネットワーク化された波形システム。
【請求項2】
前記環境の測定結果を判定する命令は、
(
は測定されたドップラー速度ベクトル、
は風ベクトルであって、当該風ベクトルの成分は水平面における速度成分であり、Gは前記測定されたドップラー速度を前記風ベクトルと関連づける幾何学変換、
は得られた風速ベクトル)
により与えられる最適化問題の解決を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項3】
前記複数のレーダ波形信号のそれぞれのレーダ波形信号は、少なくとも1つのパルス繰り返し周波数を含むことを特徴する請求項1に記載のネットワーク化された波形システム。
【請求項4】
前記複数のレーダの少なくとも1つのサブセットが、少なくとも第2のパルス繰り返し周波数を含むレーダ波形信号を送信することを特徴とする請求項3に記載のネットワーク化された波形システム。
【請求項5】
前記処理コードは、特定のネットワーク波形信号を送信するための前記複数のレーダへの命令を送信する命令をさらに含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項6】
前記環境の測定結果は、速度の測定結果を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項7】
前記処理コードは、毎秒100メートルより大きい速度を判定するように構成されることを特徴とする請求項6に記載のネットワーク化された波形システム。
【請求項8】
前記環境の測定結果は、反射率の測定結果を含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項9】
前記処理コードは、前記送信された波形信号がネットワーク波形信号であるかどうかを判定するように構成されることを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項10】
前記複数のレーダの少なくとも1つは、Xバンドレーダ、モノスタティックレーダ、及びマグネトロンレーダの少なくともいずれかであることを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項11】
前記処理コードは、エイリアスのない風系場を判定する命令をさらに含むことを特徴とする請求項1に記載のネットワーク化された波形システム。
【請求項12】
環境内の異なる地理的位置に配置された複数のレーダから、複数のレーダ波形信号を送信する工程と、
送信された前記複数のレーダ波形信号の結果として得られる出力データを、前記複数のレーダから受信する工程であって、前記出力データの少なくとも1つのサブセットがエイリアスされている工程と、
前記複数のレーダからの前記出力データを統合処理する工程と、
処理された前記出力データから、エイリアスのない、前記環境の測定結果を判定する工程と、
を備えることを特徴とするレーダ測定結果の曖昧性を解決する方法。
【請求項13】
エイリアスのない、前記環境の測定結果を判定する工程は、
(
は測定されたドップラー速度ベクトル、
は風ベクトルであって、当該風ベクトルは水平面における速度成分であり、Gは前記測定されたドップラー速度を前記風ベクトルと関連づける幾何学変換、
は得られた風速ベクトル)
により与えられる最適化問題の解決を含むことを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項14】
前記複数のレーダ波形信号は、ネットワーク波形信号であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項15】
前記複数のレーダ波形信号のそれぞれのレーダ波形信号は、少なくとも1つのパルス繰り返し周波数を含むことを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項16】
前記複数のレーダの少なくとも1つのサブセットは、少なくとも第2のパルス繰り返し周波数を含むレーダ波形信号を送信するようにそれぞれ構成されることを特徴とする請求項15に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項17】
特定のネットワーク波形信号を送信するための前記複数のレーダへの命令を送信する工程をさらに備えることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項18】
前記エイリアスのない測定結果は、速度の測定結果であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項19】
前記エイリアスのない測定結果は、少なくとも毎秒100メートルの速度の測定結果であることを特徴とする請求項18に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項20】
前記エイリアスのない測定結果は、反射率の測定結果であることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項21】
前記複数のレーダの少なくとも1つは、Xバンドレーダ、モノスタティックレーダ、及びマグネトロンレーダの少なくともいずれかであることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項22】
前記処理された出力データから、エイリアスのない風系場を判定する工程をさらに備えることを特徴とする請求項12に記載のレーダ測定結果の曖昧性を解決する方法。
【請求項23】
複数のレーダからネットワーク波形信号を送信する送信手段であって、前記ネットワーク波形信号が複数のレーダ波形信号を含む送信手段と、
送信された前記ネットワーク波形信号の結果として得られる、前記複数のレーダからの出力データを受信する受信手段と、
環境の測定結果を判定するために前記複数のレーダからの出力データを統合処理する処理手段と、
を備えることを特徴とするネットワーク化されたレーダシステム。
【請求項24】
複数のレーダからのレーダデータを用いて、少なくとも毎秒100m/sの速度を判定する工程であって、前記複数のレーダのそれぞれが100m/s未満の速度の測定をサポート可能な前記レーダデータを提供するように構成される工程を備えることを特徴とするドップラーレーダの測定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図13A】
【図13B】
【図7A】
【図7B】
【図7C】
【図7D】
【図8A】
【図8B】
【図8C】
【図8D】
【図8E】
【図8F】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】
【図12C】
【図12D】
【図14A】
【図14B】
【図14C】
【図14D】
【図15A】
【図15B】
【図15C】
【図15D】
【図2】
【図3】
【図4】
【図5】
【図6】
【図13A】
【図13B】
【図7A】
【図7B】
【図7C】
【図7D】
【図8A】
【図8B】
【図8C】
【図8D】
【図8E】
【図8F】
【図9】
【図10A】
【図10B】
【図11A】
【図11B】
【図11C】
【図12A】
【図12B】
【図12C】
【図12D】
【図14A】
【図14B】
【図14C】
【図14D】
【図15A】
【図15B】
【図15C】
【図15D】
【公表番号】特表2011−520127(P2011−520127A)
【公表日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願番号】特願2011−508680(P2011−508680)
【出願日】平成21年5月7日(2009.5.7)
【国際出願番号】PCT/US2009/043186
【国際公開番号】WO2009/140143
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(592246587)コロラド ステート ユニバーシティー リサーチ ファウンデーション (17)
【Fターム(参考)】
【公表日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願日】平成21年5月7日(2009.5.7)
【国際出願番号】PCT/US2009/043186
【国際公開番号】WO2009/140143
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(592246587)コロラド ステート ユニバーシティー リサーチ ファウンデーション (17)
【Fターム(参考)】
[ Back to top ]