
ネットワーク機器、ネットワークシステムおよび監視カメラシステム
【課題】監視カメラにおける動体または不動体の検知部の検知状態(検知中、検知停止中等)を、ネットワークを介して接続される監視装置側で認識可能とする。
【解決手段】監視カメラは動体または不動体の検知部を有している。検知部は、1フレーム毎に、画像データを処理して、動体または不動体を検知する。監視カメラは、画像データおよびメタデータを、監視装置に送信する。各フレームのメタデータは、時刻情報、位置情報および検知情報を含む。検知情報は、検知部の検知状態を示す情報(検知ステータス)と、検知部で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報)とを持つ。検知ステータスは、「検知中」あるいは「検知停止中」を示す。監視装置側では、メタデータに含まれる検知ステータスにより、検知部の検知状態を認識でき、その後の処理に利用できる。
【解決手段】監視カメラは動体または不動体の検知部を有している。検知部は、1フレーム毎に、画像データを処理して、動体または不動体を検知する。監視カメラは、画像データおよびメタデータを、監視装置に送信する。各フレームのメタデータは、時刻情報、位置情報および検知情報を含む。検知情報は、検知部の検知状態を示す情報(検知ステータス)と、検知部で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報)とを持つ。検知ステータスは、「検知中」あるいは「検知停止中」を示す。監視装置側では、メタデータに含まれる検知ステータスにより、検知部の検知状態を認識でき、その後の処理に利用できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ネットワーク機器、ネットワークシステムおよび監視カメラシステムに関する。詳しくは、この発明は、他のネットワーク機器に画像データと共に送信するメタデータに、検知部で検知された動体または不動体に関する情報の他に、検知部の検知状態を示す情報を含めることにより、他のネットワーク機器側で当該検知部の検知状態を認識可能としたネットワーク機器等に係るものである。
【背景技術】
【0002】
監視カメラシステムとして、監視カメラ(ネットワークカメラ)がネットワークを介して記録装置に接続され、監視画像を撮像して得られた画像データを監視カメラからネットワークを通じて記録装置に送信して記録するものがある(例えば、特許文献1参照)。この種の監視カメラシステムで、さらに、監視カメラが動体検知、不動体検知等の機能を持ち、当該監視カメラから記録装置に、検知情報を含むメタデータを送信して画像データと共に記録することが考えられている。
【特許文献1】特開2006−80596号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述したように監視カメラから記録装置に送信される検知情報は、例えば、機器の異常等によって動体または不動体の検知が停止されている期間にあっては、動体または不動体が検知されなかった場合と同じ状態となる。この場合、記録装置に記録された画像データから、検知情報に基づいて、動体または不動体がある期間を探索する場合、実際には動体または不動体が存在する期間であっても、動体または不動体の検知が停止されている期間であった場合には、動体または不動体のない場合と検知情報が同じになっているので、正確な探索を行うことができなくなる。
【0004】
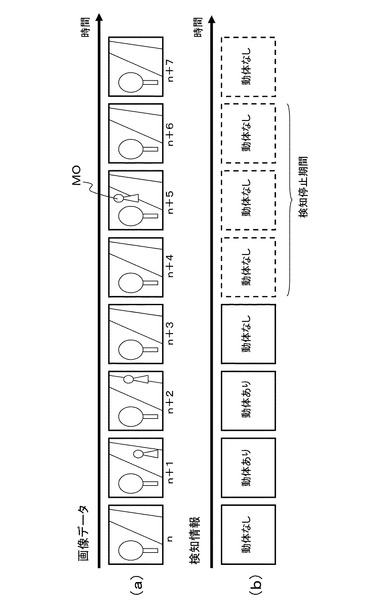
図14は、従来における、監視カメラから記録装置に送信されて記録される画像データおよび動体の検知情報の一例を示している。
【0005】
第nフレームでは、動体検知によって動体が検知されず、監視カメラから記録装置には動体なしの検知情報が送信されて記録される。第n+1フレームでは、動体検知によって動体が検知され、監視カメラから記録装置には動体ありの検知情報が送信されて記録される。第n+2フレームでは、動体検知によって動体が検知され、監視カメラから記録装置には動体ありの検知情報が送信されて記録される。
【0006】
第n+3フレームでは、動体検知によって動体が検知されず、監視カメラから記録装置には動体なしの検知情報が送信されて記録される。第n+4フレーム〜第n+6フレームでは、何らかの原因で動体検知が停止されており、動体が検知されず、検知情報は第n+3フレームと同じであることから、監視カメラから記録装置には検知情報は送信されない。第n+7フレームでは、動体検知が再開されるが、当該動体検知によって動体が検知されず、検知情報は第n+3フレームと同じであることから、監視カメラから記録装置には検知情報は送信されない。
【0007】
なお、図14においては、送信される検知情報を実線で示し、送信されない検知情報を破線で示している。
【0008】
このように、動体検知が停止されている第n+4フレーム〜第n+6フレームでは動体がない場合と検知情報が同じになるので、例えば、第n+5フレームに動体MOがあった場合にあっても、検知情報から当該動体MOがある期間(第n+5フレーム)を探索することができない。
【0009】
この発明の目的は、第1のネットワーク機器における動体または不動体の検知部の検知状態を、第1のネットワークから画像データおよびメタデータを送る第2のネットワーク機器側で認識可能とすることにある。
【課題を解決するための手段】
【0010】
この発明の概念は、
第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムであって、
上記第1のネットワーク機器は、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記第2のネットワーク機器に送信するデータ送信部とを有し、
上記第2のネットワーク機器は、 上記第1のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とするネットワークシステムにある。
【0011】
この発明において、例えば、監視カメラ、カメラサーバ等の第1のネットワーク機器は、ネットワークを介して、監視装置(コンピュータ)、記録装置(レコーダ)等の第2のネットワーク機器に接続されている。
【0012】
第1のネットワーク機器では、検知部において、画像データを処理して、動体または不動体が検知される。この検知部では、例えば、フレーム毎に動体または不動体の検知動作が行われる。第1のネットワーク機器が監視カメラである場合、処理対象の画像データは、撮像して得られた監視画像に対応した画像データである。第1のネットワーク機器から第2のネットワーク機器には、画像データおよびメタデータが送信される。
【0013】
このメタデータには、検知部の検知状態を示す情報および検知部で検知された動体または不動体に関する情報が含まれる。検知部の検知状態を示す情報は、例えば、検知中、背景取得中、PTZ(Pan Tilt Zoom)動作中、映像異常、機器異常等である。例えば、検知部の検知状態が検知中である場合には動体または不動体の検知が行われるが、その他の場合には動体または不動体の検知は行われず、検知停止中となる。
【0014】
第2のネットワーク機器では、第1のネットワーク機器から送信されてくる画像データおよびメタデータが受信されて、記録される。メタデータには、上述したように、検知部の検知状態を示す情報が含まれていることから、当該第2のネットワーク機器では、第1のネットワーク機器の検知部における検知状態を容易に知ることができる。
【0015】
この発明において、例えば、第2のネットワーク機器では、上述の検知部の検知状態を示す情報を利用した処理が行われるようにしてもよい。例えば、第2のネットワーク機器では、検知部の検知状態を示す情報を利用して、検知部が検知を停止している期間に対応した画像データを処理し、動体または不動体を検知する処理が行われる。また、例えば、第2のネットワーク機器では、検知部の検知状態を示す情報を利用して、検知部の検知状態を、画像データによる画像に対応させて表示する処理が行われる。
【発明の効果】
【0016】
この発明によれば、他のネットワーク機器に画像データと共に送信するメタデータに、検知部で検知された動体または不動体に関する情報の他に、検知部の検知状態を示す情報を含めるものであり、他のネットワーク機器側で当該検知部の検知状態を認識でき、その後の処理に利用できる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しながら、この発明の実施の形態について説明する。
【0018】
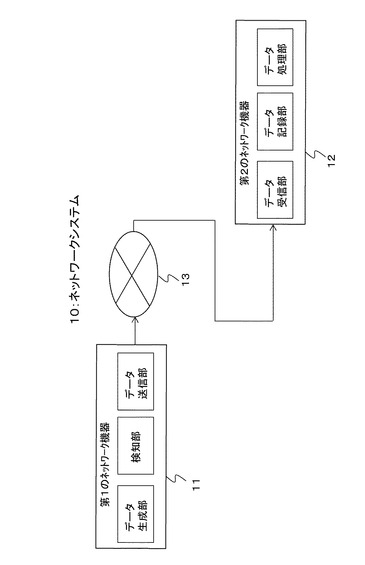
図1は、第1のネットワーク機器11と第2のネットワーク機器12とがネットワーク13を介して接続されたネットワークシステム10である。第1のネットワーク機器11は、例えば、監視カメラ、カメラサーバ等である。また、第2のネットワーク機器12は、例えば、監視装置(コンピュータ)、記録装置(レコーダ)等である。
【0019】
第1のネットワーク機器11は、動体または不動体を検知する検知部を有している。この検知部は、画像データを処理し、動体または不動体を検知する。この場合、検知部は、フレーム毎に、動体または不動体の検知動作を行う。例えば、第1のネットワーク機器11が監視カメラ等の撮像機器である場合、当該第1のネットワーク機器11では、自身が撮像して生成した画像データを処理して、動体または不動体の検知が行われる。この場合、第1のネットワーク機器11は、データ生成部を有している。また、例えば、第1のネットワーク機器11がカメラサーバ等の録画機器である場合、当該第1のネットワーク機器11では、他の機器から供給される画像データ、あるいは自身が記録メディアから再生した画像データを処理して、動体または不動体の検知が行われる。
【0020】
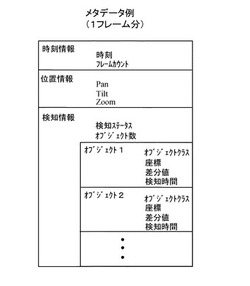
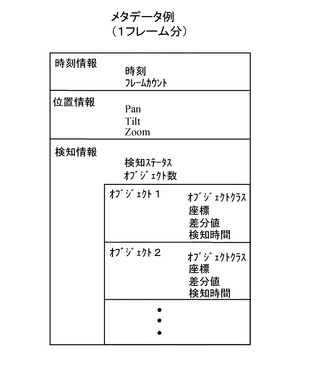
第1のネットワーク機器は、検知情報(検知部の検知状態を示す情報および検知部で検知された動体または不動体に関する情報)を含むメタデータを生成するメタデータ生成部を有している。図2は、例えば、後述する監視カメラで生成されて監視装置に送信される、メタデータの1フレーム分を示している。このメタデータには、時刻情報、位置情報および検知情報が含まれている。
【0021】
時刻情報は、時刻およびフレームカウントからなっている。時刻は現在時刻を示す時分秒であり、フレームカウントは監視カメラが起動してからのフレーム数である。位置情報は、パン位置、チルト位置およびズーム倍率からなっている。検知情報は、検知ステータス、オブジェクト数、およびオブジェクト情報からなっている。
【0022】
検知ステータスは、検知部の検知状態を示す情報を構成している。この検知ステータスは、例えば、検知中(0x01)、背景取得中(0x02)、PTZ(Pan Tilt Zoom)動作中(0x03)、映像異常(0x04)、機器異常(0x05)等である。なお、検知部では、検知中である場合には動体または不動体の検知が行われるが、その他の場合には動体または不動体の検知は行われず、検知停止中となる。
【0023】
オブジェクト数は、検知された動体または不動体の個数である。オブジェクト情報は、オブジェクト数分だけ存在する。オブジェクト情報は、検知部で検知された動体または不動体に関する情報を構成している。オブジェクト数が0である場合、オブジェクト情報は存在しない。オブジェクト数が0となるのは、検知ステータスが検知中(0x01)で、検知部で検知が行われたが、動体または不動体が検知されなかった場合、あるいは、検知ステータスが検知中以外で、検知部で検知が行われなかった場合が該当する。
【0024】
オブジェクト情報は、オブジェクトクラス、座標、差分値、検知時間からなっている。オブジェクトクラスは、動体検知であるか不動体検知であるかを示す情報である。座標は、検知された動体または不動体の位置を示す座標である。差分値は、検知された動体または不動体と背景との画素レベルの差である。検知時間は、検知された動体または不動体が最初に検知された時刻である。この検知時間により、動体または不動体の滞在時間を求めることができる。
【0025】
第1のネットワーク機器11は、第2のネットワーク機器12に、画像データおよびメタデータを送信するデータ送信部を有している。データ送信部は、画像データの各フレームに対応して、図2に示すようなメタデータを送信する。ただし、データ送信部は、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、当該メタデータを送信しない。例えば、動体または不動体が検知されないフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。また、検知中以外の所定の検知ステータスにあるフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。
【0026】
第2のネットワーク機器12は、第1のネットワーク機器11から送信されてくる画像データおよびメタデータを受信するデータ受信部と、この受信された画像データおよびメタデータ記録するデータ記録部を有している。上述したように、画像データの各フレームに対応して送信されてくるメタデータには、検知部の検知状態を示す情報を構成する検知ステータスが含まれているので、第2のネットワーク機器12側では、第1のネットワーク機器11の検知部における検知状態を認識できる。
【0027】
第2のネットワーク機器12は、検知ステータス(検知部の検知状態を示す情報)を利用した処理を行うデータ処理部を有している。例えば、データ処理部は、検知ステータスを利用して、検知部が検知を停止している期間に対応した画像データを処理し、動体または不動体を検知する処理を行う。また、例えば、データ処理部は、検知ステータスを利用して、検知部の検知状態を、画像データによる画像に対応させて表示する処理を行う。
【0028】
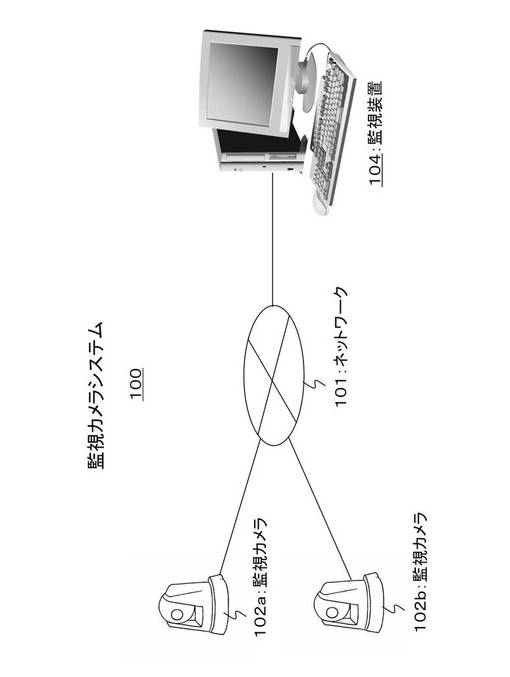
次に、ネットワークシステム10の具体例としての監視カメラシステム100を説明する。図3は、監視カメラシステム100の構成例を示している。この監視カメラシステム100は、ネットワーク101に、監視カメラ102a,102bおよび監視装置104が接続された構成となっている。監視装置104はパーソナルコンピュータで構成されている。
【0029】
監視カメラ102a,102bは、PTZ型のカメラであり、パン・チルト・ズームの機能を持っている。この監視カメラ102a,102bは、監視画像を撮像し、この監視画像に対応した画像データを生成し、この画像データを監視装置104に送信する。また、この監視カメラ102a,102bは、動体または不動体の検知機能を持っており、検知された動体または不動体に関する情報を含むメタデータを生成し、このメタデータを監視装置104に送信する。
【0030】
監視装置104は、監視カメラ102a,102bからネットワーク101を介して送られてくる画像データおよびメタデータをストレージに蓄積し、またこの画像データによる画像をモニタに表示する。ユーザは、監視カメラ102a,102bのパン・チルト・ズームの設定、さらには、動体または不動体の検知条件の設定等を、監視装置104側で行うことができる。ユーザが監視カメラ102a,102bにおける動体または不動体の検知条件の設定を行う際、監視装置104はユーザに設定画面を提供する。
【0031】
監視カメラ102(102a,102b)の構成例を、図4を用いて説明する。
【0032】
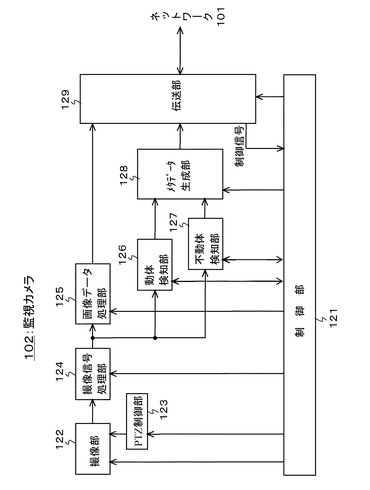
図4において、監視カメラ102は、制御部121と、撮像部122と、PTZ制御部123と、撮像信号処理部124と、画像データ処理部125と、動体検知部126と、不動体検知部127と、メタデータ生成部128と、伝送部129とを有している。
【0033】
制御部121は、監視カメラ102の各部の動作を制御する。この制御部121は、例えば、CPU(Central Processing Unit)と、ROM(Read OnlyMemory)と、RAM(Random Access Memory)を備えている。この場合、CPUは、ROMに格納されている制御プログラムを必要に応じて読み出し、読み出した制御プログラムをRAMに転送して展開し、当該展開された制御プログラムを読み出して実行することで、各部の動作を制御する。
【0034】
撮像部122は、図示しない撮像レンズおよび撮像素子を有しており、監視画像を撮像し、この監視画像に対応した撮像信号を出力する。撮像素子は、CCD(Charged Coupled Device)あるいはCMOS(ComplementaryMetal-Oxide Semiconductor)等の撮像素子である。撮像部122は、さらに、パン・チルト・ズーム機能(PTZ機能)を備えている。PTZ制御部123は、制御部121の制御の下、撮像部122におけるパン位置、チルト位置、ズーム倍率を制御する。
【0035】
撮像信号処理部124は、撮像部122から出力される撮像信号(アナログ信号)のサンプルホールドおよび利得制御、アナログ信号からデジタル信号への変換、さらにホワイトバランス調整、ガンマ補正等を行って、画像データを生成する。撮像部122および撮像信号処理部124は、画像データ生成部を構成している。画像データ処理部125は、撮像信号処理部124で生成された画像データに対してデータ圧縮処理を行って圧縮画像データを生成する。
【0036】
動体検知部126は、撮像信号処理部124で生成された画像データを処理することで、この画像データによる画像から動体領域を検知する。不動体検知部127は、撮像信号処理部124で生成された画像データを処理することで、この画像データによる画像から不動体領域(物体の発生領域、物体の消失領域)を検知する。
【0037】
動体検知部126における動体検知は、ユーザによる設定で動体の検知が選択され、かつ当該動体検知部126の検知状態が「検知中」にある場合に、1フレーム毎に行われる。動体検知が選択されるが、当該動体検知部126の検知状態が、「検知中」以外、つまり、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等にある場合には、動体検知は行われない。「背景取得中」、「映像異常」および「機器異常」の各場合には、検知動作を行うことができないからである。また、「PTZ動作中」の場合には、検知動作自体は可能であるが、検知結果が不安定となるからである。
【0038】
同様に、不動体検知部127における不動体検知は、ユーザによる設定で不動体の検知が選択され、かつ当該不動体検知部127の検知状態が「検知中」にある場合に、1フレーム毎に行われる。不動体検知が選択されるが、当該不動体検知部127の検知状態が、「検知中」以外、つまり、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等にある場合には、不動体検知は行われない。
【0039】
メタデータ生成部128は、各フレームで、検知情報を含むメタデータを生成する(図2参照)。ここで、検知情報は、動体検知部126または不動体検知部127の検知状態(検知ステータス)、および動体検知部126または不動体検知部127で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報等)である。メタデータ生成部128は、メタデータに含める検知情報を、検知部126,127からの検知情報および制御部121からの情報等に基づいて生成する。
【0040】
伝送部129は、画像データ処理部125で生成された圧縮画像データおよびメタデータ生成部128で生成されたメタデータを、FTP(File Transfer Protocol)、HTTP(HypertextTransfer Protocol)等のプロトコルにより、ネットワーク101を介して、監視装置104に送信する。この伝送部129は、データ送信部を構成している。ここで、伝送部129は、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、当該メタデータを送信しない。例えば、動体または不動体が検知されないフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。また、検知中以外の所定の検知ステータスにあるフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。
【0041】
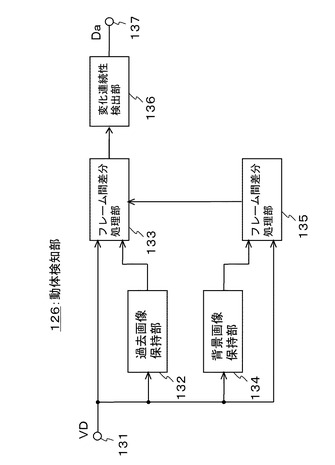
上述の動体検知部126の具体例(特願2004−266012号参照)を、図5を用いて説明する。図5において、動体検知部126は、入力端子131、過去画像保持部132、フレーム間差分処理部133、背景画像保持部134、フレーム間差分処理部135、変化連続性検出部136および出力端子137を有している。
【0042】
入力端子131は、画像データVDを入力するための端子である。過去画像保持部132は、過去数フレームの画像データを過去画像データ群として保持する。フレーム間差分処理部133は、過去画像保持部132に保持されている過去数フレームの画像データと、入力端子131に入力される現フレームの画像データとの差分値を求める。
【0043】
背景画像保持部134は、背景画像の画像データを保持する。フレーム間差分処理部135は、背景画像保持部134に保持されている背景画像の画像データと、入力端子131に入力される現フレームの画像データとの差分を検出し、この差分値に基づいて現フレーム画像のうち背景画像と異なる領域を検出する。
【0044】
上述したフレーム間差分処理部133は、フレーム間差分処理部135で検出された領域に基づき、差分値を求める処理を、当該検出領域のみで行い、高速な処理を実現すると共に、動き領域として過去に動体が存在していた領域(残像領域)が検出されることを防止する。
【0045】
変化連続性検出部136は、フレーム間差分処理部133で求められた数フレーム分の差分値に基づいて、画素毎に、変化連続性を検出して、動体領域(動き領域)か否かを検出する。この場合、画素毎に、数フレーム分の差分値に対してそれぞれ閾値処理を行い、閾値を越えた状態が一定時間以上継続した場合には、動体領域を構成する画素であるとする。
【0046】
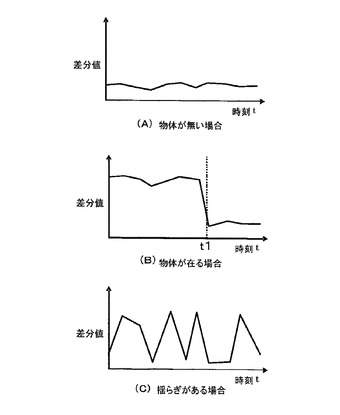
変化連続性検出部136における検出処理について、図6(A)〜(C)を参照して、さらに説明する。この図6(A)〜(C)は、ある画素における数フレーム分の差分値を、横軸に過去フレームの時間、縦軸にそれぞれの過去フレームの差分値をとって、示している。
【0047】
ある画素に物体(動体)が無い場合、図6(A)に示すように、数フレーム分の差分値は小さい状態が継続したものとなる。次に、ある画素に時刻t1のフレームで物体が進入してきて、現フレームでも当該物体が存在する場合、図6(B)に示すように、時刻t1以前のフレームの差分値は大きく、それ以後のフレームの差分値は小さくなる。次に、ある画素に木の葉や波等の揺らぎ(周期的な動き)がある場合、図6(C)に示ように、差分値はランダムに変動する。
【0048】
このように、ある画素に物体が進入してきた場合には、図6(B)に示すように、一定時間の間、差分値が大きい状態におかれる。そのため、変化連続性検出部126は、差分値が大きなフレームの連続数がカウントされ、その値が所定数を越えるとき、動体領域を構成する画素であるとする。
【0049】
なお、ある画素に木の葉や波等の揺らぎがある場合には、図6(C)に示ように、差分値が大きなフレームの連続数は少なく、当該ある画素が動き領域を構成する画素とはされない。また、差分値の図示は省略するが、ある画素に物体の進入によらない輝度変化(単発的な動き)がある場合も、上述した木の葉や波等の揺らぎ(周期的な動き)がある場合と同様に、差分値が大きなフレームの連続数は少なく、当該ある画素が動き領域を構成する画素とはされない。これにより、動体領域として、突発的あるいは周期的な動き領域が除かれ、画像内に進入してきた物体の領域のみ検出可能となる。
【0050】
変化連続性検出部136は、上述したように動き領域を構成する画素とした各画素に対して隣接画素との結合処理等によるラベリングを行って動体領域Daを検知し、その情報を出力端子137に出力する。
【0051】
図5に示す動体検知部126の動作を説明する。入力端子131には画像データVDが入力される。この画像データVDは背景画像保持部134に供給され、物体が存在していない状態における画像データVDが背景画像の画像データとして保持される。
【0052】
入力端子131に入力される画像データVDはフレーム間差分処理部135に供給される。そして、フレーム間差分処理部135では、背景画像保持部134に保持されている背景画像の画像データと、入力端子131に入力される現フレームの画像データとの差分値が検出され、この差分値に基づいて現フレーム画像のうち背景画像と異なる領域が検出される。
【0053】
入力端子131に入力される画像データVDが過去画像保持部132に供給され、この過去画像保持部132には過去数フレーム分の画像データが過去画像データ群として保持される。
【0054】
入力端子131に入力される画像データVDがフレーム間差分処理部133に供給される。そして、このフレーム間差分処理部133では、過去画像保持部132に保持されている過去数フレームの画像データと、入力端子121に入力される現フレームの画像データとの差分値が求められる。この場合、上述のフレーム間差分処理部135で検出された領域に基づき、差分値を求める処理は、当該検出領域のみで行われ、処理の高速化が図られ、また残像領域の検出が防止される。
【0055】
このようにフレーム間差分処理部133で求められた数フレーム分の差分値は変化連続性検出部136に供給される。この変化連続性検出部136では、画素毎に、数フレーム分の差分値に対してそれぞれ閾値処理が行われ、閾値を越えた状態が一定時間以上継続した場合には、動体領域を構成する画素であるとする決定が行われる。
【0056】
そして、この変化連続性検出部136では、上述したように動体領域を構成する画素とした各画素に基づいて隣接画素との結合処理などのラベリングが行われて動体領域Daが検知される。この動体領域Daの情報は出力端子137に出力される。
【0057】
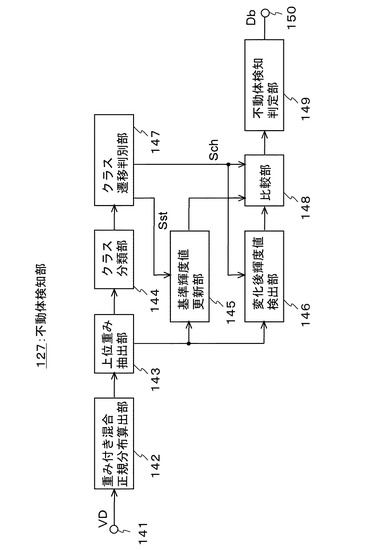
次に、上述の不動体検知部127の具体例(特願2005−157588号参照)を、図7を用いて説明する。この例は、基準背景画像の更新方法として、重み付き混合正規分布を用いるものである。
【0058】
図7において、不動体検知部127は、入力端子141、重み付き混合正規分布算出部142、上位重み抽出部143、クラス分類部144、基準輝度値更新部145、変化後輝度値検出部146、クラス遷移判別部147、比較部148、不動体検知判定部149および出力端子150を有している。
【0059】
入力端子141は、画像データVDを入力するための端子である。重み付き混合正規分布算出部142は、画素毎に、輝度値が複数個の輝度正規分布のいずれに属するかを判定し、複数個の輝度正規分布のそれぞれについての重みを更新すると共に、平均値を更新する。そして、この重み付き混合正規分布算出部142は、その算出結果(少なくとも各分布の重みおよび平均値(平均輝度値))を上位重み抽出部143に供給する。
【0060】
ここで、輝度正規分布の平均値および重みの更新についてさらに説明する。
【0061】
現在(時点t)の画素の輝度Xtの確率P(Xt)は、一般に、(1)式のように表すことができる。
【0062】
【数1】

【0063】
この(1)式における確率密度関数ηは、(2)式のように表すことができる。
【0064】
【数2】
【0065】
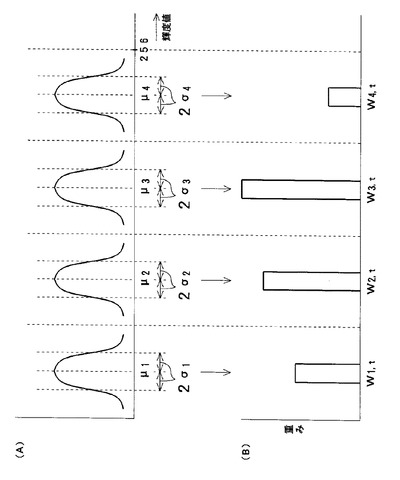
各画素の輝度が、k個(kは正の整数)の正規分布のいずれに属するかを探す。例えば、1画素の輝度データが8ビットで表される画像データの場合、図8(A)に示すような4個の輝度正規分布を用意し、各画素の輝度が、当該4個の輝度正規分布のどれに属するかを探す。
【0066】
ある画素の輝度Xtが、例えば、その輝度正規分布の平均値μk±2σk以内の値であるか否か判定し、以内であれば当該輝度正規分布に属していると判定し、以外であれば当該輝度正規分布に属していないと判定する。もしも、いずれの輝度正規分布にも属さないときには、k個の輝度正規分布のうち後述する重みが最も小さい輝度正規分布の平均値μを、そのときの画素の輝度Xtに置き換える。
【0067】
そして、画素毎に、当該画素の輝度Xtが属した輝度正規分布の重みを大きく、属さなかった輝度正規分布の重みを小さくするように、各輝度正規分布の重みωk,tを更新する。すなわち、例えば、画素の輝度Xtが属した輝度正規分布の重みωk,tは、以下の(3)式にしたがって更新し、また、属さなかった輝度正規分布の重みωk,tは、以下の(4)式にしたがって更新する。なお、(3)式および(4)式において、αは重みの更新速度であり、0≦α≦1である。
【0068】
【数3】
【0069】
そして、各輝度正規分布の平均値μtと分散σは、以下の(5)式、(6)式、(7)式に基づいて、更新される。
【0070】
【数4】
【0071】
以上により、各画素について、複数個の輝度正規分布のそれぞれの重みωk,tの情報が、図8(B)に示すように更新されてゆく。
【0072】
上位重み抽出部143は、複数個の輝度正規分布のうち、重みの大きさが上位2個の分布の重みをクラス分類部144に供給すると共に、重みが最大である分布の平均輝度値を基準輝度値更新部145および変化後輝度値検出部146に供給する。
【0073】
クラス分類部144は、重みの大きさが上位2個の分布の重みを用い、以下の(8)式および(9)式に基づいて、現時点における画素の輝度の変化状態についてクラス分類し、その分類結果のクラスの情報をクラス遷移判別部147に供給する。
【0074】
重みの大きさが上位2個の分布の重みを用いたクラス分類について説明する。この場合、重みの大きさの上位2個の輝度正規分布の重みの関係、特にこの実施の形態では、上位2個の輝度正規分布の重みの比に基づいてクラス分類をする。上位2つの輝度正規分布の重みのうち、重みの大きさが大きい方をwb、小さい方をwsとしたときに、(8)式で表される比rの値に基づいてクラス分類する。
【0075】
r=wb/ws ・・・(8)
【0076】
この場合、比r=1および1近傍のときには、画素の輝度は、上位2個の輝度正規分布のどちらに属するかが不安定な状態であるので、不安定クラスとする。
【0077】
そして、比rが所定値以上であれば、上位2個の輝度正規分布の重みに大きな違いがあり、いずれの輝度正規分布に画素の輝度が属するかは安定して判定できるので、安定クラスとする。そして、安定クラスと、不安定クラスとの中間の状態は、中間クラスとする。
【0078】
比rの値に対するクラス分類のための閾値は、例えば試行錯誤により決定される。この実施の形態では、例えば、(9)式で示されるものとする。
【0079】
不安定クラス ; 1≦r<1.1〜1.2
中間クラス ; 1.1〜1.2≦r<1.5
安定クラス ; 1.5≦r
・・・(9)
【0080】
クラス遷移判別部147は、クラス分類部144からのクラスの情報の時間的な遷移を判別する。そして、クラス遷移判別部147は、この実施形態では、判別したクラス遷移に基づいて、基準輝度値の更新タイミング信号Sstおよび輝度変化検出タイミング信号Schを生成する。
【0081】
図9に、上位2個の輝度正規分布の重みの比に基づいて、画素の輝度の状態を安定クラス、中間クラス、不安定クラスの3つのクラスに分類したときの遷移状態を示す。この図9では、便宜上、安定クラスをA、中間クラスをB、不安定クラスをCとし、遷移状態を表す値、遷移状態値をSTATE_Xとする。ここで、遷移状態値STATE_XにおけるXは、不安定クラスCになったときには、C(STATE_C)となるが、その他のときには、前のクラスの状態を考慮した値とされる。
【0082】
すなわち、STATE_AおよびSTATE_Bは、初期状態がAクラスおよびBクラスの場合の遷移状態値である。初期状態がCクラスのときにも遷移状態値は、STATE_Cとなる。STATE_BAは、AクラスからBクラスに遷移したとき、または、BクラスからAクラスに遷移したときの遷移状態値である。STATE_CBは、BクラスからCクラスに遷移したとき、または、CクラスからBクラスに遷移したときの遷移状態値である。さらに、STATE_CBAは、AクラスからBクラス、さらにCクラスに遷移したとき、または、CクラスからBクラス、さらにAクラスに遷移したときの遷移状態値である。
【0083】
初期状態の遷移状態値をSTATE_Aとし、例えば安定→中間→不安定と遷移した場合、遷移状態値はSTATE_AからSTATE_BA、さらにSTATE_Cと変化する。
【0084】
また、例えば、STATE_Aは、最大重みの分布が変わらず、変化がないことを示す。また、STATE_CBAは、重みの大きさが2番目から最大に変化した分布であることを示し、いままで、監視領域中に在った物がなくなったか、新たに静止状態のものが監視領域内に入ったことを表している。
【0085】
したがって、不動体を検知するタイミング、つまり、輝度変化検出タイミングは、この実施形態では、遷移状態値がSTATE_CBAであるときとする。そして、この実施形態では、安定性を上げるため、クラス遷移判別部147は、遷移状態値がSTATE_CBAになったときに即座に輝度変化検出タイミングとするのではなく、STATE_CBAの状態がある所定時間継続したときを輝度変化検出タイミングとして、輝度変化検出タイミング信号Schを生成し出力する。
【0086】
例えば、この実施の形態では、輝度変化検出(不動体検出)は、画像データの毎フレームではなく、例えば4フレームごとに行なうようにしており、STATE_CBAの状態が、例えば30回(4秒)続いた後を、輝度変化検出タイミングとする。
【0087】
ここで、図10の例について説明する。この例は、監視領域に車が入ってきて停止した場合における上位2つの重みの推移に関連して、上述した3つのクラスを示したものである。この図10において、f1(w1_t,m1_t)は、時刻tで、重みw1_tと輝度(輝度正規分布の平均値)m1_tとを持つ背景を表し、f2(w2_t,m2_t)は、時刻tで、重みw2_tと輝度(輝度正規分布の平均値)m2_tとを持つ車を表している。重みも、輝度(輝度正規分布の平均値)も、上述した(5)式、(6)式、(7)式により時間tの経過に伴って更新される。
【0088】
図10に示すように、最初は、背景の重みw1_tが大きく、停車すると徐々に車の重みw2_tが増し、それに伴い背景の重みw1_tが減り、最終的には車の重みw2_tが最大になる。したがって、重みが一番大きい輝度正規分布の平均値(輝度)の変化、すなわち、図10の場合であれば、m1_tとm2_tの差を検知すれば、注目画素の部分が背景から停止している車に変化したことがわかる。
【0089】
図10の例において、時点t2は遷移状態値がSTATE_CBAになった時刻であり、輝度変化検出タイミングは、時点t3である。また、クラス遷移判別部147は、基準輝度値を更新するタイミングを、上位2個の重みの関係が不安定クラスであって、かつ、前回の遷移状態値が、かつて安定したクラスに属していたことを示すSTATE_BAかSTATE_CBAの場合とする。そして、クラス遷移判別部147は、この基準輝度値の更新タイミングの時点で、基準輝度値の更新タイミング信号Sstを生成する。この更新タイミングの時点は、図10の例であれば、時点t1のタイミングである。
【0090】
ただし、クラス遷移判別部147は、上述した滞在時間の短い物を不動体として検出しないようにするために、更新タイミングの時点と判定される時点であっても、前回の輝度変化検出タイミング信号Schの生成時点から指定滞在時間以上経過していないときには、基準輝度値の更新タイミング信号Sstは生成せず、基準輝度値は更新しないようにする。
【0091】
このために、この実施形態では、基準輝度値の更新を許可するかどうかを示すフラグ(以下、「更新フラグ」という)を用意する。この更新フラグは、初期状態では「false(=偽)」として、更新を許可する状態とする。すなわち、更新タイミング時点において、この更新フラグを参照し、更新フラグが「false」の時には、更新タイミング信号Sstを生成して出力することを許可する。
【0092】
そして、この実施形態では、基準輝度値を更新タイミングで更新したときに、つまり、更新タイミング信号Sstを出力したときに、更新フラグを「true(=真)」として、更新の禁止状態にする。クラス遷移判別部147は、更新フラグが「true」の状態のときには、更新タイミング信号Sstを出力しない。
【0093】
クラス遷移判別部147では、検出すべき不動体の指定滞在時間以上、更新フラグが「true」の状態が継続したときには、「false」に戻して、更新タイミング信号Sstの出力を許可するようにする。また、クラス遷移判別部147は、画素の輝度変化がないと判断できるときに、更新フラグを「true」から「false」の状態に戻すようにしてもよい。
【0094】
以上のようにして、クラス遷移判別部147は、基準輝度値の更新タイミング信号Sstを生成し、この基準輝度値の更新タイミング信号Sstを基準輝度値更新部145に供給する。基準輝度値更新部145は、この基準輝度値の更新タイミング信号Sstにより、重みが最大である輝度正規分布の平均値を、基準輝度値として取得して更新する。
【0095】
また、クラス遷移判別部147は、上述のようにして生成した輝度変化検出タイミング信号Schを変化後輝度値検出部146に供給する。変化後輝度値検出部146は、この輝度変化検出タイミング信号Schにより、重みが最大である輝度正規分布の平均値を、変化後輝度値として取得する。
【0096】
そして、基準輝度値更新部145で更新された基準輝度値が比較部148に供給されると共に、変化後輝度値検出部146で取得された変化後輝度値が比較部148に供給される。さらに、クラス遷移判別147からの輝度変化検出タイミング信号Schが、比較タイミング信号としてこの比較部148に供給される。比較部148では、変化後輝度値検出部146で取得された変化後輝度値と、基準輝度値更新部145で更新された基準輝度値とが比較されて、両者に有意差があるかどうか判定され、その比較判定結果が不動体検知判定部149に供給される。
【0097】
不動体検知判定部149は、比較部148からの比較判定結果を受けて、当該比較判定結果が変化後輝度値と基準輝度値との間に有意差があることを示しているときに、そのときの時間、例えばフレーム番号を不動体検知時間として保存する。そして、不動体検知判定部149は、比較判定結果が変化後輝度値と基準輝度値との間に有意差があることを示している状態が、その後継続しているときには、予め定められた時間後、不動体を検知した状態となる。
【0098】
上述した図10の例について、上述した不動体の検知処理動作をさらに説明する。図10において、初期状態t=t0では更新フラグは「false」、基準輝度値はm1_t0とされる。図10に示す時点t=t1では、更新フラグは「false」であり、上位2つの重みの関係から、画素の輝度の状態は不安定クラスであり、かつ、前回の遷移状態値がSTATE_BAなので、更新タイミング信号Sstが発生され、基準輝度値は、m1_t0からm1_t1に更新され、更新フラグは「true」とされる。
【0099】
そして、時点t=t3では、輝度変化検出タイミング信号Schが発生するので、基準輝度値m1_t1と変化後輝度値m2_t3とが比較されて、画素の輝度値の変化が検知される。このとき、基準輝度値m1_t1と変化後輝度値m2_t3との間には、有意差があるので、そのときの時間、例えばフレーム番号が検知時間として保存される。そして、その後変化がなければ、不動体を検知した状態となる。
【0100】
次に、一旦静止した物が、指定した滞在検知時間に満たずに移動した場合につき、図11の例を用いて説明する。この図11の例において、f1(w1_t,m1_t)は背景についての、f2(w2_t,m2_t)は車についての、重みの変化を示す。初期状態t0では、更新フラグは「false」、基準輝度値はm1_t0とされる。
【0101】
時点t1では、上位2つの重みの関係は、不安定クラスの状態で、前回の遷移状態値がSTATE_BAなので、基準輝度値は、m1_t0からm1_t1に更新され、更新フラグは「true」とされる。そして、時点t3では、基準輝度値m1_t1と、変化後輝度値m2_t3とが比較されて、画素の輝度値の変化が検知される。次の時点t4では、前の輝度変化検出タイミング時点t3から指定滞在時間以内にあるので、更新フラグは「false」に戻されることなく、「true」のままとされる。そのため、この時点t4では、基準輝度値の更新は行われない。
【0102】
したがって、このときには次の輝度変化検出タイミングである時点t6では、基準輝度値m1_t1と、当該時点t6での変化後輝度値m1_t6とが比較されるので、画素の輝度値の変化はないとされる。このようにして、指定滞在時間よりも短い時間停止で移動する物の場合には、不動体を検知した状態とはならない。
【0103】
不動体検知判定部149は、上述した不動体検知処理を画素単位で行っている。この不動体検知判定部149では、上述した画素単位の不動体検知処理が終了すると、画素単位で検知した検知領域をまとめるために検知フラグを基に、ブロック化処理を行う。このブロック化処理は、例えば、縦×横=4×4画素の範囲を1つのブロックとした場合に、そのブロック中に検知画素が半分以上あれば、そのブロック内の画素の全部を不動体として検知したことにし、反対に、上述のブロック中に検知画素が半分未満ならば、そのブロック内の画素は不動体とは検知しなかったことにする。この場合、ブロック範囲の動かし方は、1画素ずつずらしていってもよいし、あるいは4画素飛ばしでもよい。
【0104】
不動体検知判定部149では、上述したようにブロック検知領域に対して、隣接画素との結合処理などのラベリングが行われて不動体領域Dbが検知される。この不動体領域Dbの情報は出力端子150に出力される。
【0105】
図4に示す監視カメラ102の動作を説明する。撮像部122からは監視画像に対応した撮像信号(アナログ信号)が得られる。この撮像信号は撮像信号処理部124に供給される。撮像信号処理部124では、撮像信号に対して、サンプルホールドおよび利得制御等のアナログ信号処理、A/D変換処理、さらにはホワイトバランス調整、ガンマ補正等のデジタル信号処理が施されて、画像データが生成される。この画像データ125は、画像データ処理部125に供給される。画像データ処理部125では、画像データに対してデータ圧縮処理が施されて、圧縮画像データが生成される。この圧縮画像データは伝送部129に供給される。
【0106】
また、撮像信号処理部124で生成された画像データは、動体検知部126および不動体検知部127に供給される。動体検知部126では、動体の検知が選択されている場合に、画像データが処理されて、動体領域の検知が行われる。動体検知部126で検知される動体領域の情報はメタデータ生成部128に供給される。
【0107】
一方、不動体検知部127では、不動体の検知が選択されている場合に、画像データが処理されて、不動体領域の検知が行われる。このように不動体検知部127で検知される不動体領域の情報はメタデータ生成部128に供給される。
【0108】
メタデータ生成部128では、検知部126,127からの検知情報および制御部121からの情報等に基づいて、1フレーム毎に、動体検知部126、あるいは不動体検知部127で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報)、およびこれら検知部の検知状態を示す情報(検知ステータス)を含むメタデータ(図2参照)が生成される。このようにメタデータ生成部128で生成されたメタデータは、伝送部129に供給される。
【0109】
伝送部129では、画像データ処理部で生成された圧縮画像データおよびメタデータ生成部128で生成されたメタデータが、FTP、HTTP等のプロトコルにより、ネットワーク101を介して、監視装置104に送信することが行われる。ここで、動体または不動体が検知されないフレームが連続する場合、あるいは、「検知中」以外の所定の検知ステータスにあるフレームが連続する場合等、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、最初のフレームでのみメタデータの送信が行われる。
【0110】
次に、監視装置104の構成例を、図10の機能ブロックを用いて説明する。
【0111】
図10において、監視装置104は、制御部161と、ユーザインタフェース部162と、伝送部163と、画像データ処理部164と、記録再生処理部165と、オンスクリーンディスプレイ(OSD)部166と、合成部167と、ストレージ168と、モニタ169とを有している。
【0112】
制御部161は、監視装置104の各部の動作を制御する。この制御部161は、CPUで構成される。CPUは、ROM等に格納されている制御プログラムを必要に応じて読み出し、読み出した制御プログラムをRAMに転送して展開し、当該展開された制御プログラムを読み出して実行することで、各部の動作を制御する。ユーザインタフェース部162は、操作キー、リモートコントロール信号受信器等で構成されている。このユーザインタフェース部162は、制御部161に接続されている。ユーザインタフェース部162は、ユーザ操作に応じた操作信号を生成して制御部161に供給する。
【0113】
伝送部163は、監視カメラ102(102a,102b)からネットワーク101を介して送信されてくる画像データ(圧縮画像データ)およびメタデータを受信する。ストレージ168は、伝送部163で受信された画像データ(圧縮画像データ)およびメタデータを記録する。このストレージ168は、例えば、ハードディスクドライブ(HDD)で構成されている。記録再生処理部165は、ストレージ168への画像データおよびメタデータの記録、さらには、このストレージ168からの画像データおよびメタデータの再生を制御する。
【0114】
画像データ処理部164は、伝送部で受信された画像データ(圧縮画像データ)、あるいはストレージ168から再生された画像データ(圧縮画像データ)に対してデータ伸長処理を行って、出力用の画像データを生成する。画像データ処理部164は、通常は、伝送部163で受信されている画像データに対してデータ伸長処理を行うが、再生時には、ストレージ168から再生された画像データに対してデータ伸長処理を行う。
【0115】
OSD部166は、制御部161の制御に基づいて、OSD用の表示信号を生成する。例えば、OSD部166は、監視カメラ102の検知部206、207における検知情報(検知部の検知状態を示す情報、検知部で検知された動体または不動体に関する情報)を表示する際、当該検知情報を表示するための表示信号を発生する。
【0116】
合成部167は、画像データ処理部164で得られた画像データにOSD部166から出力される表示信号を合成し、合成信号をモニタ169に供給する。この場合、モニタ169には、画像データ処理部164で得られた画像データによる画像が表示されると共に、OSD部166から出力される表示信号によるOSD表示が行われる。
【0117】
図12に示す監視装置104の動作を説明する。伝送部163では、監視カメラ102(102a,102b)から送信されてくる画像データ(圧縮画像データ)およびメタデータが受信される。この画像データは、記録再生処理部165および画像データ処理部164に供給される。一方、メタデータは、記録再生処理部165および制御部161に供給される。ユーザの設定により、記録指示がなされている場合には、当該画像データおよびメタデータは記録再生処理部165により、ストレージ168に記録される。
【0118】
画像データ処理部164では、伝送部163から供給される画像データに対して、データ伸長処理が施されて、出力用の画像データが生成される。また、制御部161は、伝送部163から供給されるメタデータに基づいて、OSD部166を制御し、当該OSD部166から、監視カメラ102の検知部206、207における検知情報等を表示するための表示信号を発生させる。
【0119】
合成部167では、画像データ処理部164で得られた画像データに、OSD部166で発生された表示信号が合成され、その合成信号はモニタ169に供給される。これにより、モニタ169には、監視カメラ102(102a,102b)で撮像された監視画像に対応した画像が表示される。そして、その画像上に、例えば、監視カメラ102の検知部206,207における検知情報等がOSD表示される。
【0120】
また、ストレージ168からの画像データおよびメタデータの再生時には、再生された画像データは記録再生処理部165を介して画像データ処理部164に供給され、再生されたメタデータは記録再生処理部165を介して制御部161に供給される。以下は、上述した伝送部163で受信された画像データおよびメタデータに対する動作と同様にして、モニタ169に再生された画像データによる画像が表示されると共に、その画像上に、例えば、監視カメラ102の検知部206,207における検知情報等がOSD表示される。
【0121】
上述したように、図3に示す監視カメラシステム100においては、監視カメラ102(102a,102b)から監視装置104に画像データおよびメタデータが送信される。このメタデータには、検知部206,207の検知状態を示す情報(検知ステータス)および検知部206,207で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報等)が含まれている。そのため、監視装置104側では、監視カメラ102(102a,102b)の検知部206,207における検知状態(「検知中」、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等)を認識でき、その後の処理、例えば、上述したように、当該検知状態をモニタ169にOSD表示する処理を行うことができる。
【0122】
また、監視装置104側では、検知部206,207の検知状態を示す情報(検知ステータス)に基づいて、検知部206,207が検知を停止している期間(例えば「映像異常」、「機器異常」等の期間)、に対応した画像データを処理し、動体または不動体を検知する処理を行うことができる。この検知処理、および上述の表示処理は制御部161により行われる。この場合、制御部161は、データ処理部を構成する。
【0123】
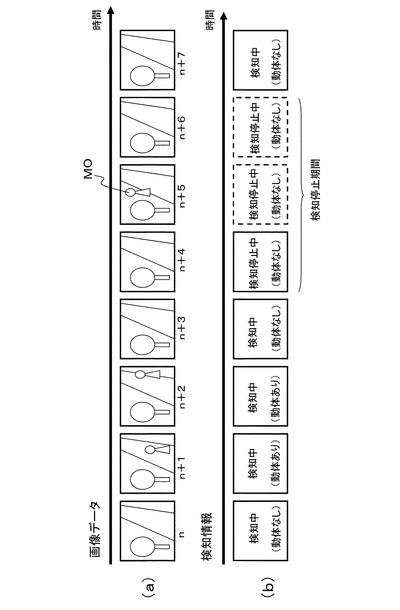
図13は、監視カメラ102から監視装置104に送信されて記録される画像データおよび動体の検知情報の一例を示している。
【0124】
第nフレームでは、動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報(オブジェクト数が0を示し、オブジェクト情報を持たない)を含むメタデータが送信されて記録される。第n+1フレーム、第n+2フレームでは、動体検知によって動体が検知され、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体ありの情報(オブジェクト数が1以上の数を示し、オブジェクト数に対応した個数のオブジェクト情報を持つ)を含むメタデータが送信されて記録される。
【0125】
第n+3フレームでは、動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報を含むメタデータが送信されて記録される。第n+4フレーム〜第n+6フレームでは、何らかの原因で動体検知が停止されており、第n+4フレームでのみ、「検知停止中」を示す検知ステータス(「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等)と、動体なしの情報を含むメタデータが送信されて記録される。第n+7フレームでは、動体検知が再開されるが、当該動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報を含むメタデータが送信されて記録される。
【0126】
このように、監視カメラ102の検知部206でなんらかの原因で動体検知が停止される場合、その停止期間の最初のフレームで「検知停止中」を示す検知ステータスを含むメタデータが監視カメラ102から監視装置104に送信されて記録される。そのため、監視装置104側では、メタデータに含まれる検知ステータス(検知部の検知状態を示す情報)を用いて、動体検知が停止されている期間に対応した画像データを特定でき、当該画像データを処理して動体の検知処理を行うことができる。この場合、検知停止期間内の第n+5フレームに動体MOがあった場合、監視装置104側における検知処理により、当該動体MOの検知が可能となる。
【0127】
なお、上述実施の形態においては、監視装置104側で監視カメラ102から送信されてくるメタデータに含まれる検知ステータス(検知部の検知状態を示す情報)を利用する処理として、検知状態を画像上にOSD表示する処理、検知停止期間の画像データから動体または不動体を検知する処理を述べたが、当該検知ステータスを利用した処理は、これに限定されるものではない。例えば、その他に、この検知ステータスを利用して、監視装置側に画像データおよびメタデータを送っている監視カメラが何らかの理由で検知停止の状態となった場合に、他の監視カメラから画像データおよびメタデータを送ってもらうようにカメラの切り替え処理を行うことができる。
【産業上の利用可能性】
【0128】
この発明は、例えば監視カメラからネットワークを介して接続された監視装置に、画像データ、および検知された動体または不動体に関する情報を含むメタデータを送る監視カメラ装置に適用できる。
【図面の簡単な説明】
【0129】
【図1】第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムを示すブロック図である。
【図2】監視カメラで生成されて監視装置に送信される、メタデータの1フレーム分を示す図である。
【図3】監視カメラと監視装置とがネットワークを介して接続された監視カメラシステムを示すブロック図である。
【図4】監視カメラの構成例を示すブロック図である。
【図5】動体検知部の具体例を示すブロック図である。
【図6】動体検知部における変化連続性の検出処理を説明するための図である。
【図7】不動体検知部の具体例を示すブロック図である。
【図8】重み付き混合正規分布を説明するための図である。
【図9】画素の輝度の状態を安定クラス、中間クラス、不安定クラスの3つのクラスに分類したときのクラス遷移状態を示す図である。
【図10】背景と車の重みの推移例とクラス分類(不動体を検知)を示す図である。
【図11】背景と車の重みの推移例とクラス分類(不動体を非検知)を示す図である。
【図12】監視装置の構成例を示す機能ブロック図である。
【図13】監視カメラから監視装置に送信されて記録される画像データおよび動体の検知情報の一例を示す図である。
【図14】従来における、監視カメラから記録装置に送信されて記録される画像データおよび動体の検知情報の一例を示す図である。
【符号の説明】
【0130】
10・・・ネットワークシステム、11・・・第1のネットワーク機器、12・・・第2のネットワーク機器、13・・・ネットワーク、100・・・監視カメラシステム、101・・・ネットワーク、102,102a,102b・・・監視カメラ、104・・・監視装置、121・・・制御部、122・・・撮像部、123・・・PTZ制御部、124・・・撮像信号処理部、125・・・画像データ処理部、126・・・動体検知部、127・・・不動体検知部、128・・・メタデータ生成部、129・・・伝送部、161・・・制御部、162・・・ユーザインタフェース部、163・・・伝送部、164・・・画像データ処理部、165・・・記録再生処理部、166・・・OSD部、167・・・合成部、168・・・ストレージ、169・・・モニタ、170・・・設定画面、171・・・画像表示部、172・・・検知選択部、173・・・検知設定部、174-1〜174-3・・・チェックボックス、175・・・しきい値設定スライドバー、176・・・検知枠、177・・・動体、178・・・動体検知インジケータ、179・・・しきい値表示部、180・・・OKボタン
【技術分野】
【0001】
この発明は、ネットワーク機器、ネットワークシステムおよび監視カメラシステムに関する。詳しくは、この発明は、他のネットワーク機器に画像データと共に送信するメタデータに、検知部で検知された動体または不動体に関する情報の他に、検知部の検知状態を示す情報を含めることにより、他のネットワーク機器側で当該検知部の検知状態を認識可能としたネットワーク機器等に係るものである。
【背景技術】
【0002】
監視カメラシステムとして、監視カメラ(ネットワークカメラ)がネットワークを介して記録装置に接続され、監視画像を撮像して得られた画像データを監視カメラからネットワークを通じて記録装置に送信して記録するものがある(例えば、特許文献1参照)。この種の監視カメラシステムで、さらに、監視カメラが動体検知、不動体検知等の機能を持ち、当該監視カメラから記録装置に、検知情報を含むメタデータを送信して画像データと共に記録することが考えられている。
【特許文献1】特開2006−80596号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述したように監視カメラから記録装置に送信される検知情報は、例えば、機器の異常等によって動体または不動体の検知が停止されている期間にあっては、動体または不動体が検知されなかった場合と同じ状態となる。この場合、記録装置に記録された画像データから、検知情報に基づいて、動体または不動体がある期間を探索する場合、実際には動体または不動体が存在する期間であっても、動体または不動体の検知が停止されている期間であった場合には、動体または不動体のない場合と検知情報が同じになっているので、正確な探索を行うことができなくなる。
【0004】
図14は、従来における、監視カメラから記録装置に送信されて記録される画像データおよび動体の検知情報の一例を示している。
【0005】
第nフレームでは、動体検知によって動体が検知されず、監視カメラから記録装置には動体なしの検知情報が送信されて記録される。第n+1フレームでは、動体検知によって動体が検知され、監視カメラから記録装置には動体ありの検知情報が送信されて記録される。第n+2フレームでは、動体検知によって動体が検知され、監視カメラから記録装置には動体ありの検知情報が送信されて記録される。
【0006】
第n+3フレームでは、動体検知によって動体が検知されず、監視カメラから記録装置には動体なしの検知情報が送信されて記録される。第n+4フレーム〜第n+6フレームでは、何らかの原因で動体検知が停止されており、動体が検知されず、検知情報は第n+3フレームと同じであることから、監視カメラから記録装置には検知情報は送信されない。第n+7フレームでは、動体検知が再開されるが、当該動体検知によって動体が検知されず、検知情報は第n+3フレームと同じであることから、監視カメラから記録装置には検知情報は送信されない。
【0007】
なお、図14においては、送信される検知情報を実線で示し、送信されない検知情報を破線で示している。
【0008】
このように、動体検知が停止されている第n+4フレーム〜第n+6フレームでは動体がない場合と検知情報が同じになるので、例えば、第n+5フレームに動体MOがあった場合にあっても、検知情報から当該動体MOがある期間(第n+5フレーム)を探索することができない。
【0009】
この発明の目的は、第1のネットワーク機器における動体または不動体の検知部の検知状態を、第1のネットワークから画像データおよびメタデータを送る第2のネットワーク機器側で認識可能とすることにある。
【課題を解決するための手段】
【0010】
この発明の概念は、
第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムであって、
上記第1のネットワーク機器は、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記第2のネットワーク機器に送信するデータ送信部とを有し、
上記第2のネットワーク機器は、 上記第1のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とするネットワークシステムにある。
【0011】
この発明において、例えば、監視カメラ、カメラサーバ等の第1のネットワーク機器は、ネットワークを介して、監視装置(コンピュータ)、記録装置(レコーダ)等の第2のネットワーク機器に接続されている。
【0012】
第1のネットワーク機器では、検知部において、画像データを処理して、動体または不動体が検知される。この検知部では、例えば、フレーム毎に動体または不動体の検知動作が行われる。第1のネットワーク機器が監視カメラである場合、処理対象の画像データは、撮像して得られた監視画像に対応した画像データである。第1のネットワーク機器から第2のネットワーク機器には、画像データおよびメタデータが送信される。
【0013】
このメタデータには、検知部の検知状態を示す情報および検知部で検知された動体または不動体に関する情報が含まれる。検知部の検知状態を示す情報は、例えば、検知中、背景取得中、PTZ(Pan Tilt Zoom)動作中、映像異常、機器異常等である。例えば、検知部の検知状態が検知中である場合には動体または不動体の検知が行われるが、その他の場合には動体または不動体の検知は行われず、検知停止中となる。
【0014】
第2のネットワーク機器では、第1のネットワーク機器から送信されてくる画像データおよびメタデータが受信されて、記録される。メタデータには、上述したように、検知部の検知状態を示す情報が含まれていることから、当該第2のネットワーク機器では、第1のネットワーク機器の検知部における検知状態を容易に知ることができる。
【0015】
この発明において、例えば、第2のネットワーク機器では、上述の検知部の検知状態を示す情報を利用した処理が行われるようにしてもよい。例えば、第2のネットワーク機器では、検知部の検知状態を示す情報を利用して、検知部が検知を停止している期間に対応した画像データを処理し、動体または不動体を検知する処理が行われる。また、例えば、第2のネットワーク機器では、検知部の検知状態を示す情報を利用して、検知部の検知状態を、画像データによる画像に対応させて表示する処理が行われる。
【発明の効果】
【0016】
この発明によれば、他のネットワーク機器に画像データと共に送信するメタデータに、検知部で検知された動体または不動体に関する情報の他に、検知部の検知状態を示す情報を含めるものであり、他のネットワーク機器側で当該検知部の検知状態を認識でき、その後の処理に利用できる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照しながら、この発明の実施の形態について説明する。
【0018】
図1は、第1のネットワーク機器11と第2のネットワーク機器12とがネットワーク13を介して接続されたネットワークシステム10である。第1のネットワーク機器11は、例えば、監視カメラ、カメラサーバ等である。また、第2のネットワーク機器12は、例えば、監視装置(コンピュータ)、記録装置(レコーダ)等である。
【0019】
第1のネットワーク機器11は、動体または不動体を検知する検知部を有している。この検知部は、画像データを処理し、動体または不動体を検知する。この場合、検知部は、フレーム毎に、動体または不動体の検知動作を行う。例えば、第1のネットワーク機器11が監視カメラ等の撮像機器である場合、当該第1のネットワーク機器11では、自身が撮像して生成した画像データを処理して、動体または不動体の検知が行われる。この場合、第1のネットワーク機器11は、データ生成部を有している。また、例えば、第1のネットワーク機器11がカメラサーバ等の録画機器である場合、当該第1のネットワーク機器11では、他の機器から供給される画像データ、あるいは自身が記録メディアから再生した画像データを処理して、動体または不動体の検知が行われる。
【0020】
第1のネットワーク機器は、検知情報(検知部の検知状態を示す情報および検知部で検知された動体または不動体に関する情報)を含むメタデータを生成するメタデータ生成部を有している。図2は、例えば、後述する監視カメラで生成されて監視装置に送信される、メタデータの1フレーム分を示している。このメタデータには、時刻情報、位置情報および検知情報が含まれている。
【0021】
時刻情報は、時刻およびフレームカウントからなっている。時刻は現在時刻を示す時分秒であり、フレームカウントは監視カメラが起動してからのフレーム数である。位置情報は、パン位置、チルト位置およびズーム倍率からなっている。検知情報は、検知ステータス、オブジェクト数、およびオブジェクト情報からなっている。
【0022】
検知ステータスは、検知部の検知状態を示す情報を構成している。この検知ステータスは、例えば、検知中(0x01)、背景取得中(0x02)、PTZ(Pan Tilt Zoom)動作中(0x03)、映像異常(0x04)、機器異常(0x05)等である。なお、検知部では、検知中である場合には動体または不動体の検知が行われるが、その他の場合には動体または不動体の検知は行われず、検知停止中となる。
【0023】
オブジェクト数は、検知された動体または不動体の個数である。オブジェクト情報は、オブジェクト数分だけ存在する。オブジェクト情報は、検知部で検知された動体または不動体に関する情報を構成している。オブジェクト数が0である場合、オブジェクト情報は存在しない。オブジェクト数が0となるのは、検知ステータスが検知中(0x01)で、検知部で検知が行われたが、動体または不動体が検知されなかった場合、あるいは、検知ステータスが検知中以外で、検知部で検知が行われなかった場合が該当する。
【0024】
オブジェクト情報は、オブジェクトクラス、座標、差分値、検知時間からなっている。オブジェクトクラスは、動体検知であるか不動体検知であるかを示す情報である。座標は、検知された動体または不動体の位置を示す座標である。差分値は、検知された動体または不動体と背景との画素レベルの差である。検知時間は、検知された動体または不動体が最初に検知された時刻である。この検知時間により、動体または不動体の滞在時間を求めることができる。
【0025】
第1のネットワーク機器11は、第2のネットワーク機器12に、画像データおよびメタデータを送信するデータ送信部を有している。データ送信部は、画像データの各フレームに対応して、図2に示すようなメタデータを送信する。ただし、データ送信部は、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、当該メタデータを送信しない。例えば、動体または不動体が検知されないフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。また、検知中以外の所定の検知ステータスにあるフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。
【0026】
第2のネットワーク機器12は、第1のネットワーク機器11から送信されてくる画像データおよびメタデータを受信するデータ受信部と、この受信された画像データおよびメタデータ記録するデータ記録部を有している。上述したように、画像データの各フレームに対応して送信されてくるメタデータには、検知部の検知状態を示す情報を構成する検知ステータスが含まれているので、第2のネットワーク機器12側では、第1のネットワーク機器11の検知部における検知状態を認識できる。
【0027】
第2のネットワーク機器12は、検知ステータス(検知部の検知状態を示す情報)を利用した処理を行うデータ処理部を有している。例えば、データ処理部は、検知ステータスを利用して、検知部が検知を停止している期間に対応した画像データを処理し、動体または不動体を検知する処理を行う。また、例えば、データ処理部は、検知ステータスを利用して、検知部の検知状態を、画像データによる画像に対応させて表示する処理を行う。
【0028】
次に、ネットワークシステム10の具体例としての監視カメラシステム100を説明する。図3は、監視カメラシステム100の構成例を示している。この監視カメラシステム100は、ネットワーク101に、監視カメラ102a,102bおよび監視装置104が接続された構成となっている。監視装置104はパーソナルコンピュータで構成されている。
【0029】
監視カメラ102a,102bは、PTZ型のカメラであり、パン・チルト・ズームの機能を持っている。この監視カメラ102a,102bは、監視画像を撮像し、この監視画像に対応した画像データを生成し、この画像データを監視装置104に送信する。また、この監視カメラ102a,102bは、動体または不動体の検知機能を持っており、検知された動体または不動体に関する情報を含むメタデータを生成し、このメタデータを監視装置104に送信する。
【0030】
監視装置104は、監視カメラ102a,102bからネットワーク101を介して送られてくる画像データおよびメタデータをストレージに蓄積し、またこの画像データによる画像をモニタに表示する。ユーザは、監視カメラ102a,102bのパン・チルト・ズームの設定、さらには、動体または不動体の検知条件の設定等を、監視装置104側で行うことができる。ユーザが監視カメラ102a,102bにおける動体または不動体の検知条件の設定を行う際、監視装置104はユーザに設定画面を提供する。
【0031】
監視カメラ102(102a,102b)の構成例を、図4を用いて説明する。
【0032】
図4において、監視カメラ102は、制御部121と、撮像部122と、PTZ制御部123と、撮像信号処理部124と、画像データ処理部125と、動体検知部126と、不動体検知部127と、メタデータ生成部128と、伝送部129とを有している。
【0033】
制御部121は、監視カメラ102の各部の動作を制御する。この制御部121は、例えば、CPU(Central Processing Unit)と、ROM(Read OnlyMemory)と、RAM(Random Access Memory)を備えている。この場合、CPUは、ROMに格納されている制御プログラムを必要に応じて読み出し、読み出した制御プログラムをRAMに転送して展開し、当該展開された制御プログラムを読み出して実行することで、各部の動作を制御する。
【0034】
撮像部122は、図示しない撮像レンズおよび撮像素子を有しており、監視画像を撮像し、この監視画像に対応した撮像信号を出力する。撮像素子は、CCD(Charged Coupled Device)あるいはCMOS(ComplementaryMetal-Oxide Semiconductor)等の撮像素子である。撮像部122は、さらに、パン・チルト・ズーム機能(PTZ機能)を備えている。PTZ制御部123は、制御部121の制御の下、撮像部122におけるパン位置、チルト位置、ズーム倍率を制御する。
【0035】
撮像信号処理部124は、撮像部122から出力される撮像信号(アナログ信号)のサンプルホールドおよび利得制御、アナログ信号からデジタル信号への変換、さらにホワイトバランス調整、ガンマ補正等を行って、画像データを生成する。撮像部122および撮像信号処理部124は、画像データ生成部を構成している。画像データ処理部125は、撮像信号処理部124で生成された画像データに対してデータ圧縮処理を行って圧縮画像データを生成する。
【0036】
動体検知部126は、撮像信号処理部124で生成された画像データを処理することで、この画像データによる画像から動体領域を検知する。不動体検知部127は、撮像信号処理部124で生成された画像データを処理することで、この画像データによる画像から不動体領域(物体の発生領域、物体の消失領域)を検知する。
【0037】
動体検知部126における動体検知は、ユーザによる設定で動体の検知が選択され、かつ当該動体検知部126の検知状態が「検知中」にある場合に、1フレーム毎に行われる。動体検知が選択されるが、当該動体検知部126の検知状態が、「検知中」以外、つまり、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等にある場合には、動体検知は行われない。「背景取得中」、「映像異常」および「機器異常」の各場合には、検知動作を行うことができないからである。また、「PTZ動作中」の場合には、検知動作自体は可能であるが、検知結果が不安定となるからである。
【0038】
同様に、不動体検知部127における不動体検知は、ユーザによる設定で不動体の検知が選択され、かつ当該不動体検知部127の検知状態が「検知中」にある場合に、1フレーム毎に行われる。不動体検知が選択されるが、当該不動体検知部127の検知状態が、「検知中」以外、つまり、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等にある場合には、不動体検知は行われない。
【0039】
メタデータ生成部128は、各フレームで、検知情報を含むメタデータを生成する(図2参照)。ここで、検知情報は、動体検知部126または不動体検知部127の検知状態(検知ステータス)、および動体検知部126または不動体検知部127で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報等)である。メタデータ生成部128は、メタデータに含める検知情報を、検知部126,127からの検知情報および制御部121からの情報等に基づいて生成する。
【0040】
伝送部129は、画像データ処理部125で生成された圧縮画像データおよびメタデータ生成部128で生成されたメタデータを、FTP(File Transfer Protocol)、HTTP(HypertextTransfer Protocol)等のプロトコルにより、ネットワーク101を介して、監視装置104に送信する。この伝送部129は、データ送信部を構成している。ここで、伝送部129は、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、当該メタデータを送信しない。例えば、動体または不動体が検知されないフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。また、検知中以外の所定の検知ステータスにあるフレームが連続する場合、最初のフレームでのみメタデータの送信が行われる。
【0041】
上述の動体検知部126の具体例(特願2004−266012号参照)を、図5を用いて説明する。図5において、動体検知部126は、入力端子131、過去画像保持部132、フレーム間差分処理部133、背景画像保持部134、フレーム間差分処理部135、変化連続性検出部136および出力端子137を有している。
【0042】
入力端子131は、画像データVDを入力するための端子である。過去画像保持部132は、過去数フレームの画像データを過去画像データ群として保持する。フレーム間差分処理部133は、過去画像保持部132に保持されている過去数フレームの画像データと、入力端子131に入力される現フレームの画像データとの差分値を求める。
【0043】
背景画像保持部134は、背景画像の画像データを保持する。フレーム間差分処理部135は、背景画像保持部134に保持されている背景画像の画像データと、入力端子131に入力される現フレームの画像データとの差分を検出し、この差分値に基づいて現フレーム画像のうち背景画像と異なる領域を検出する。
【0044】
上述したフレーム間差分処理部133は、フレーム間差分処理部135で検出された領域に基づき、差分値を求める処理を、当該検出領域のみで行い、高速な処理を実現すると共に、動き領域として過去に動体が存在していた領域(残像領域)が検出されることを防止する。
【0045】
変化連続性検出部136は、フレーム間差分処理部133で求められた数フレーム分の差分値に基づいて、画素毎に、変化連続性を検出して、動体領域(動き領域)か否かを検出する。この場合、画素毎に、数フレーム分の差分値に対してそれぞれ閾値処理を行い、閾値を越えた状態が一定時間以上継続した場合には、動体領域を構成する画素であるとする。
【0046】
変化連続性検出部136における検出処理について、図6(A)〜(C)を参照して、さらに説明する。この図6(A)〜(C)は、ある画素における数フレーム分の差分値を、横軸に過去フレームの時間、縦軸にそれぞれの過去フレームの差分値をとって、示している。
【0047】
ある画素に物体(動体)が無い場合、図6(A)に示すように、数フレーム分の差分値は小さい状態が継続したものとなる。次に、ある画素に時刻t1のフレームで物体が進入してきて、現フレームでも当該物体が存在する場合、図6(B)に示すように、時刻t1以前のフレームの差分値は大きく、それ以後のフレームの差分値は小さくなる。次に、ある画素に木の葉や波等の揺らぎ(周期的な動き)がある場合、図6(C)に示ように、差分値はランダムに変動する。
【0048】
このように、ある画素に物体が進入してきた場合には、図6(B)に示すように、一定時間の間、差分値が大きい状態におかれる。そのため、変化連続性検出部126は、差分値が大きなフレームの連続数がカウントされ、その値が所定数を越えるとき、動体領域を構成する画素であるとする。
【0049】
なお、ある画素に木の葉や波等の揺らぎがある場合には、図6(C)に示ように、差分値が大きなフレームの連続数は少なく、当該ある画素が動き領域を構成する画素とはされない。また、差分値の図示は省略するが、ある画素に物体の進入によらない輝度変化(単発的な動き)がある場合も、上述した木の葉や波等の揺らぎ(周期的な動き)がある場合と同様に、差分値が大きなフレームの連続数は少なく、当該ある画素が動き領域を構成する画素とはされない。これにより、動体領域として、突発的あるいは周期的な動き領域が除かれ、画像内に進入してきた物体の領域のみ検出可能となる。
【0050】
変化連続性検出部136は、上述したように動き領域を構成する画素とした各画素に対して隣接画素との結合処理等によるラベリングを行って動体領域Daを検知し、その情報を出力端子137に出力する。
【0051】
図5に示す動体検知部126の動作を説明する。入力端子131には画像データVDが入力される。この画像データVDは背景画像保持部134に供給され、物体が存在していない状態における画像データVDが背景画像の画像データとして保持される。
【0052】
入力端子131に入力される画像データVDはフレーム間差分処理部135に供給される。そして、フレーム間差分処理部135では、背景画像保持部134に保持されている背景画像の画像データと、入力端子131に入力される現フレームの画像データとの差分値が検出され、この差分値に基づいて現フレーム画像のうち背景画像と異なる領域が検出される。
【0053】
入力端子131に入力される画像データVDが過去画像保持部132に供給され、この過去画像保持部132には過去数フレーム分の画像データが過去画像データ群として保持される。
【0054】
入力端子131に入力される画像データVDがフレーム間差分処理部133に供給される。そして、このフレーム間差分処理部133では、過去画像保持部132に保持されている過去数フレームの画像データと、入力端子121に入力される現フレームの画像データとの差分値が求められる。この場合、上述のフレーム間差分処理部135で検出された領域に基づき、差分値を求める処理は、当該検出領域のみで行われ、処理の高速化が図られ、また残像領域の検出が防止される。
【0055】
このようにフレーム間差分処理部133で求められた数フレーム分の差分値は変化連続性検出部136に供給される。この変化連続性検出部136では、画素毎に、数フレーム分の差分値に対してそれぞれ閾値処理が行われ、閾値を越えた状態が一定時間以上継続した場合には、動体領域を構成する画素であるとする決定が行われる。
【0056】
そして、この変化連続性検出部136では、上述したように動体領域を構成する画素とした各画素に基づいて隣接画素との結合処理などのラベリングが行われて動体領域Daが検知される。この動体領域Daの情報は出力端子137に出力される。
【0057】
次に、上述の不動体検知部127の具体例(特願2005−157588号参照)を、図7を用いて説明する。この例は、基準背景画像の更新方法として、重み付き混合正規分布を用いるものである。
【0058】
図7において、不動体検知部127は、入力端子141、重み付き混合正規分布算出部142、上位重み抽出部143、クラス分類部144、基準輝度値更新部145、変化後輝度値検出部146、クラス遷移判別部147、比較部148、不動体検知判定部149および出力端子150を有している。
【0059】
入力端子141は、画像データVDを入力するための端子である。重み付き混合正規分布算出部142は、画素毎に、輝度値が複数個の輝度正規分布のいずれに属するかを判定し、複数個の輝度正規分布のそれぞれについての重みを更新すると共に、平均値を更新する。そして、この重み付き混合正規分布算出部142は、その算出結果(少なくとも各分布の重みおよび平均値(平均輝度値))を上位重み抽出部143に供給する。
【0060】
ここで、輝度正規分布の平均値および重みの更新についてさらに説明する。
【0061】
現在(時点t)の画素の輝度Xtの確率P(Xt)は、一般に、(1)式のように表すことができる。
【0062】
【数1】
【0063】
この(1)式における確率密度関数ηは、(2)式のように表すことができる。
【0064】
【数2】
【0065】
各画素の輝度が、k個(kは正の整数)の正規分布のいずれに属するかを探す。例えば、1画素の輝度データが8ビットで表される画像データの場合、図8(A)に示すような4個の輝度正規分布を用意し、各画素の輝度が、当該4個の輝度正規分布のどれに属するかを探す。
【0066】
ある画素の輝度Xtが、例えば、その輝度正規分布の平均値μk±2σk以内の値であるか否か判定し、以内であれば当該輝度正規分布に属していると判定し、以外であれば当該輝度正規分布に属していないと判定する。もしも、いずれの輝度正規分布にも属さないときには、k個の輝度正規分布のうち後述する重みが最も小さい輝度正規分布の平均値μを、そのときの画素の輝度Xtに置き換える。
【0067】
そして、画素毎に、当該画素の輝度Xtが属した輝度正規分布の重みを大きく、属さなかった輝度正規分布の重みを小さくするように、各輝度正規分布の重みωk,tを更新する。すなわち、例えば、画素の輝度Xtが属した輝度正規分布の重みωk,tは、以下の(3)式にしたがって更新し、また、属さなかった輝度正規分布の重みωk,tは、以下の(4)式にしたがって更新する。なお、(3)式および(4)式において、αは重みの更新速度であり、0≦α≦1である。
【0068】
【数3】
【0069】
そして、各輝度正規分布の平均値μtと分散σは、以下の(5)式、(6)式、(7)式に基づいて、更新される。
【0070】
【数4】
【0071】
以上により、各画素について、複数個の輝度正規分布のそれぞれの重みωk,tの情報が、図8(B)に示すように更新されてゆく。
【0072】
上位重み抽出部143は、複数個の輝度正規分布のうち、重みの大きさが上位2個の分布の重みをクラス分類部144に供給すると共に、重みが最大である分布の平均輝度値を基準輝度値更新部145および変化後輝度値検出部146に供給する。
【0073】
クラス分類部144は、重みの大きさが上位2個の分布の重みを用い、以下の(8)式および(9)式に基づいて、現時点における画素の輝度の変化状態についてクラス分類し、その分類結果のクラスの情報をクラス遷移判別部147に供給する。
【0074】
重みの大きさが上位2個の分布の重みを用いたクラス分類について説明する。この場合、重みの大きさの上位2個の輝度正規分布の重みの関係、特にこの実施の形態では、上位2個の輝度正規分布の重みの比に基づいてクラス分類をする。上位2つの輝度正規分布の重みのうち、重みの大きさが大きい方をwb、小さい方をwsとしたときに、(8)式で表される比rの値に基づいてクラス分類する。
【0075】
r=wb/ws ・・・(8)
【0076】
この場合、比r=1および1近傍のときには、画素の輝度は、上位2個の輝度正規分布のどちらに属するかが不安定な状態であるので、不安定クラスとする。
【0077】
そして、比rが所定値以上であれば、上位2個の輝度正規分布の重みに大きな違いがあり、いずれの輝度正規分布に画素の輝度が属するかは安定して判定できるので、安定クラスとする。そして、安定クラスと、不安定クラスとの中間の状態は、中間クラスとする。
【0078】
比rの値に対するクラス分類のための閾値は、例えば試行錯誤により決定される。この実施の形態では、例えば、(9)式で示されるものとする。
【0079】
不安定クラス ; 1≦r<1.1〜1.2
中間クラス ; 1.1〜1.2≦r<1.5
安定クラス ; 1.5≦r
・・・(9)
【0080】
クラス遷移判別部147は、クラス分類部144からのクラスの情報の時間的な遷移を判別する。そして、クラス遷移判別部147は、この実施形態では、判別したクラス遷移に基づいて、基準輝度値の更新タイミング信号Sstおよび輝度変化検出タイミング信号Schを生成する。
【0081】
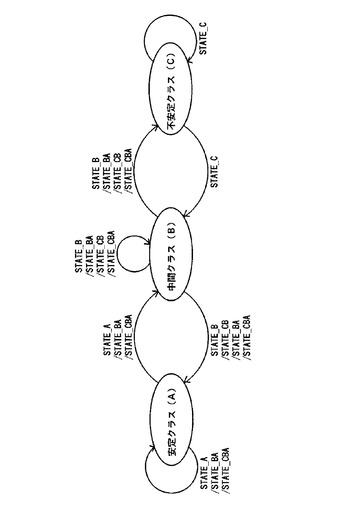
図9に、上位2個の輝度正規分布の重みの比に基づいて、画素の輝度の状態を安定クラス、中間クラス、不安定クラスの3つのクラスに分類したときの遷移状態を示す。この図9では、便宜上、安定クラスをA、中間クラスをB、不安定クラスをCとし、遷移状態を表す値、遷移状態値をSTATE_Xとする。ここで、遷移状態値STATE_XにおけるXは、不安定クラスCになったときには、C(STATE_C)となるが、その他のときには、前のクラスの状態を考慮した値とされる。
【0082】
すなわち、STATE_AおよびSTATE_Bは、初期状態がAクラスおよびBクラスの場合の遷移状態値である。初期状態がCクラスのときにも遷移状態値は、STATE_Cとなる。STATE_BAは、AクラスからBクラスに遷移したとき、または、BクラスからAクラスに遷移したときの遷移状態値である。STATE_CBは、BクラスからCクラスに遷移したとき、または、CクラスからBクラスに遷移したときの遷移状態値である。さらに、STATE_CBAは、AクラスからBクラス、さらにCクラスに遷移したとき、または、CクラスからBクラス、さらにAクラスに遷移したときの遷移状態値である。
【0083】
初期状態の遷移状態値をSTATE_Aとし、例えば安定→中間→不安定と遷移した場合、遷移状態値はSTATE_AからSTATE_BA、さらにSTATE_Cと変化する。
【0084】
また、例えば、STATE_Aは、最大重みの分布が変わらず、変化がないことを示す。また、STATE_CBAは、重みの大きさが2番目から最大に変化した分布であることを示し、いままで、監視領域中に在った物がなくなったか、新たに静止状態のものが監視領域内に入ったことを表している。
【0085】
したがって、不動体を検知するタイミング、つまり、輝度変化検出タイミングは、この実施形態では、遷移状態値がSTATE_CBAであるときとする。そして、この実施形態では、安定性を上げるため、クラス遷移判別部147は、遷移状態値がSTATE_CBAになったときに即座に輝度変化検出タイミングとするのではなく、STATE_CBAの状態がある所定時間継続したときを輝度変化検出タイミングとして、輝度変化検出タイミング信号Schを生成し出力する。
【0086】
例えば、この実施の形態では、輝度変化検出(不動体検出)は、画像データの毎フレームではなく、例えば4フレームごとに行なうようにしており、STATE_CBAの状態が、例えば30回(4秒)続いた後を、輝度変化検出タイミングとする。
【0087】
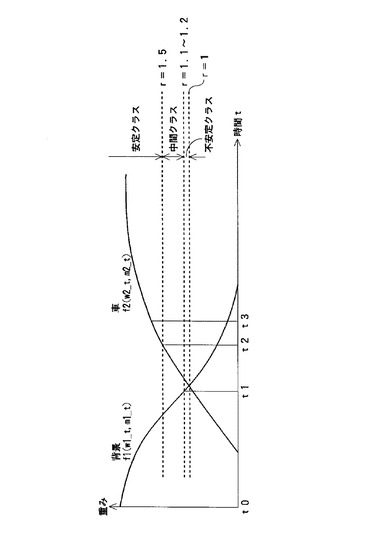
ここで、図10の例について説明する。この例は、監視領域に車が入ってきて停止した場合における上位2つの重みの推移に関連して、上述した3つのクラスを示したものである。この図10において、f1(w1_t,m1_t)は、時刻tで、重みw1_tと輝度(輝度正規分布の平均値)m1_tとを持つ背景を表し、f2(w2_t,m2_t)は、時刻tで、重みw2_tと輝度(輝度正規分布の平均値)m2_tとを持つ車を表している。重みも、輝度(輝度正規分布の平均値)も、上述した(5)式、(6)式、(7)式により時間tの経過に伴って更新される。
【0088】
図10に示すように、最初は、背景の重みw1_tが大きく、停車すると徐々に車の重みw2_tが増し、それに伴い背景の重みw1_tが減り、最終的には車の重みw2_tが最大になる。したがって、重みが一番大きい輝度正規分布の平均値(輝度)の変化、すなわち、図10の場合であれば、m1_tとm2_tの差を検知すれば、注目画素の部分が背景から停止している車に変化したことがわかる。
【0089】
図10の例において、時点t2は遷移状態値がSTATE_CBAになった時刻であり、輝度変化検出タイミングは、時点t3である。また、クラス遷移判別部147は、基準輝度値を更新するタイミングを、上位2個の重みの関係が不安定クラスであって、かつ、前回の遷移状態値が、かつて安定したクラスに属していたことを示すSTATE_BAかSTATE_CBAの場合とする。そして、クラス遷移判別部147は、この基準輝度値の更新タイミングの時点で、基準輝度値の更新タイミング信号Sstを生成する。この更新タイミングの時点は、図10の例であれば、時点t1のタイミングである。
【0090】
ただし、クラス遷移判別部147は、上述した滞在時間の短い物を不動体として検出しないようにするために、更新タイミングの時点と判定される時点であっても、前回の輝度変化検出タイミング信号Schの生成時点から指定滞在時間以上経過していないときには、基準輝度値の更新タイミング信号Sstは生成せず、基準輝度値は更新しないようにする。
【0091】
このために、この実施形態では、基準輝度値の更新を許可するかどうかを示すフラグ(以下、「更新フラグ」という)を用意する。この更新フラグは、初期状態では「false(=偽)」として、更新を許可する状態とする。すなわち、更新タイミング時点において、この更新フラグを参照し、更新フラグが「false」の時には、更新タイミング信号Sstを生成して出力することを許可する。
【0092】
そして、この実施形態では、基準輝度値を更新タイミングで更新したときに、つまり、更新タイミング信号Sstを出力したときに、更新フラグを「true(=真)」として、更新の禁止状態にする。クラス遷移判別部147は、更新フラグが「true」の状態のときには、更新タイミング信号Sstを出力しない。
【0093】
クラス遷移判別部147では、検出すべき不動体の指定滞在時間以上、更新フラグが「true」の状態が継続したときには、「false」に戻して、更新タイミング信号Sstの出力を許可するようにする。また、クラス遷移判別部147は、画素の輝度変化がないと判断できるときに、更新フラグを「true」から「false」の状態に戻すようにしてもよい。
【0094】
以上のようにして、クラス遷移判別部147は、基準輝度値の更新タイミング信号Sstを生成し、この基準輝度値の更新タイミング信号Sstを基準輝度値更新部145に供給する。基準輝度値更新部145は、この基準輝度値の更新タイミング信号Sstにより、重みが最大である輝度正規分布の平均値を、基準輝度値として取得して更新する。
【0095】
また、クラス遷移判別部147は、上述のようにして生成した輝度変化検出タイミング信号Schを変化後輝度値検出部146に供給する。変化後輝度値検出部146は、この輝度変化検出タイミング信号Schにより、重みが最大である輝度正規分布の平均値を、変化後輝度値として取得する。
【0096】
そして、基準輝度値更新部145で更新された基準輝度値が比較部148に供給されると共に、変化後輝度値検出部146で取得された変化後輝度値が比較部148に供給される。さらに、クラス遷移判別147からの輝度変化検出タイミング信号Schが、比較タイミング信号としてこの比較部148に供給される。比較部148では、変化後輝度値検出部146で取得された変化後輝度値と、基準輝度値更新部145で更新された基準輝度値とが比較されて、両者に有意差があるかどうか判定され、その比較判定結果が不動体検知判定部149に供給される。
【0097】
不動体検知判定部149は、比較部148からの比較判定結果を受けて、当該比較判定結果が変化後輝度値と基準輝度値との間に有意差があることを示しているときに、そのときの時間、例えばフレーム番号を不動体検知時間として保存する。そして、不動体検知判定部149は、比較判定結果が変化後輝度値と基準輝度値との間に有意差があることを示している状態が、その後継続しているときには、予め定められた時間後、不動体を検知した状態となる。
【0098】
上述した図10の例について、上述した不動体の検知処理動作をさらに説明する。図10において、初期状態t=t0では更新フラグは「false」、基準輝度値はm1_t0とされる。図10に示す時点t=t1では、更新フラグは「false」であり、上位2つの重みの関係から、画素の輝度の状態は不安定クラスであり、かつ、前回の遷移状態値がSTATE_BAなので、更新タイミング信号Sstが発生され、基準輝度値は、m1_t0からm1_t1に更新され、更新フラグは「true」とされる。
【0099】
そして、時点t=t3では、輝度変化検出タイミング信号Schが発生するので、基準輝度値m1_t1と変化後輝度値m2_t3とが比較されて、画素の輝度値の変化が検知される。このとき、基準輝度値m1_t1と変化後輝度値m2_t3との間には、有意差があるので、そのときの時間、例えばフレーム番号が検知時間として保存される。そして、その後変化がなければ、不動体を検知した状態となる。
【0100】
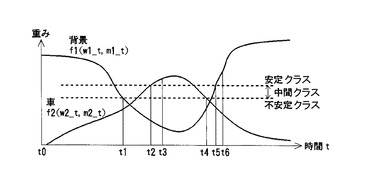
次に、一旦静止した物が、指定した滞在検知時間に満たずに移動した場合につき、図11の例を用いて説明する。この図11の例において、f1(w1_t,m1_t)は背景についての、f2(w2_t,m2_t)は車についての、重みの変化を示す。初期状態t0では、更新フラグは「false」、基準輝度値はm1_t0とされる。
【0101】
時点t1では、上位2つの重みの関係は、不安定クラスの状態で、前回の遷移状態値がSTATE_BAなので、基準輝度値は、m1_t0からm1_t1に更新され、更新フラグは「true」とされる。そして、時点t3では、基準輝度値m1_t1と、変化後輝度値m2_t3とが比較されて、画素の輝度値の変化が検知される。次の時点t4では、前の輝度変化検出タイミング時点t3から指定滞在時間以内にあるので、更新フラグは「false」に戻されることなく、「true」のままとされる。そのため、この時点t4では、基準輝度値の更新は行われない。
【0102】
したがって、このときには次の輝度変化検出タイミングである時点t6では、基準輝度値m1_t1と、当該時点t6での変化後輝度値m1_t6とが比較されるので、画素の輝度値の変化はないとされる。このようにして、指定滞在時間よりも短い時間停止で移動する物の場合には、不動体を検知した状態とはならない。
【0103】
不動体検知判定部149は、上述した不動体検知処理を画素単位で行っている。この不動体検知判定部149では、上述した画素単位の不動体検知処理が終了すると、画素単位で検知した検知領域をまとめるために検知フラグを基に、ブロック化処理を行う。このブロック化処理は、例えば、縦×横=4×4画素の範囲を1つのブロックとした場合に、そのブロック中に検知画素が半分以上あれば、そのブロック内の画素の全部を不動体として検知したことにし、反対に、上述のブロック中に検知画素が半分未満ならば、そのブロック内の画素は不動体とは検知しなかったことにする。この場合、ブロック範囲の動かし方は、1画素ずつずらしていってもよいし、あるいは4画素飛ばしでもよい。
【0104】
不動体検知判定部149では、上述したようにブロック検知領域に対して、隣接画素との結合処理などのラベリングが行われて不動体領域Dbが検知される。この不動体領域Dbの情報は出力端子150に出力される。
【0105】
図4に示す監視カメラ102の動作を説明する。撮像部122からは監視画像に対応した撮像信号(アナログ信号)が得られる。この撮像信号は撮像信号処理部124に供給される。撮像信号処理部124では、撮像信号に対して、サンプルホールドおよび利得制御等のアナログ信号処理、A/D変換処理、さらにはホワイトバランス調整、ガンマ補正等のデジタル信号処理が施されて、画像データが生成される。この画像データ125は、画像データ処理部125に供給される。画像データ処理部125では、画像データに対してデータ圧縮処理が施されて、圧縮画像データが生成される。この圧縮画像データは伝送部129に供給される。
【0106】
また、撮像信号処理部124で生成された画像データは、動体検知部126および不動体検知部127に供給される。動体検知部126では、動体の検知が選択されている場合に、画像データが処理されて、動体領域の検知が行われる。動体検知部126で検知される動体領域の情報はメタデータ生成部128に供給される。
【0107】
一方、不動体検知部127では、不動体の検知が選択されている場合に、画像データが処理されて、不動体領域の検知が行われる。このように不動体検知部127で検知される不動体領域の情報はメタデータ生成部128に供給される。
【0108】
メタデータ生成部128では、検知部126,127からの検知情報および制御部121からの情報等に基づいて、1フレーム毎に、動体検知部126、あるいは不動体検知部127で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報)、およびこれら検知部の検知状態を示す情報(検知ステータス)を含むメタデータ(図2参照)が生成される。このようにメタデータ生成部128で生成されたメタデータは、伝送部129に供給される。
【0109】
伝送部129では、画像データ処理部で生成された圧縮画像データおよびメタデータ生成部128で生成されたメタデータが、FTP、HTTP等のプロトコルにより、ネットワーク101を介して、監視装置104に送信することが行われる。ここで、動体または不動体が検知されないフレームが連続する場合、あるいは、「検知中」以外の所定の検知ステータスにあるフレームが連続する場合等、検知情報を構成する各情報に変化がないフレームにあっては、伝送容量を低減するために、最初のフレームでのみメタデータの送信が行われる。
【0110】
次に、監視装置104の構成例を、図10の機能ブロックを用いて説明する。
【0111】
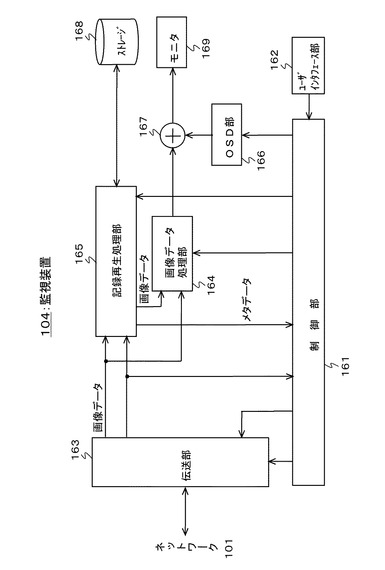
図10において、監視装置104は、制御部161と、ユーザインタフェース部162と、伝送部163と、画像データ処理部164と、記録再生処理部165と、オンスクリーンディスプレイ(OSD)部166と、合成部167と、ストレージ168と、モニタ169とを有している。
【0112】
制御部161は、監視装置104の各部の動作を制御する。この制御部161は、CPUで構成される。CPUは、ROM等に格納されている制御プログラムを必要に応じて読み出し、読み出した制御プログラムをRAMに転送して展開し、当該展開された制御プログラムを読み出して実行することで、各部の動作を制御する。ユーザインタフェース部162は、操作キー、リモートコントロール信号受信器等で構成されている。このユーザインタフェース部162は、制御部161に接続されている。ユーザインタフェース部162は、ユーザ操作に応じた操作信号を生成して制御部161に供給する。
【0113】
伝送部163は、監視カメラ102(102a,102b)からネットワーク101を介して送信されてくる画像データ(圧縮画像データ)およびメタデータを受信する。ストレージ168は、伝送部163で受信された画像データ(圧縮画像データ)およびメタデータを記録する。このストレージ168は、例えば、ハードディスクドライブ(HDD)で構成されている。記録再生処理部165は、ストレージ168への画像データおよびメタデータの記録、さらには、このストレージ168からの画像データおよびメタデータの再生を制御する。
【0114】
画像データ処理部164は、伝送部で受信された画像データ(圧縮画像データ)、あるいはストレージ168から再生された画像データ(圧縮画像データ)に対してデータ伸長処理を行って、出力用の画像データを生成する。画像データ処理部164は、通常は、伝送部163で受信されている画像データに対してデータ伸長処理を行うが、再生時には、ストレージ168から再生された画像データに対してデータ伸長処理を行う。
【0115】
OSD部166は、制御部161の制御に基づいて、OSD用の表示信号を生成する。例えば、OSD部166は、監視カメラ102の検知部206、207における検知情報(検知部の検知状態を示す情報、検知部で検知された動体または不動体に関する情報)を表示する際、当該検知情報を表示するための表示信号を発生する。
【0116】
合成部167は、画像データ処理部164で得られた画像データにOSD部166から出力される表示信号を合成し、合成信号をモニタ169に供給する。この場合、モニタ169には、画像データ処理部164で得られた画像データによる画像が表示されると共に、OSD部166から出力される表示信号によるOSD表示が行われる。
【0117】
図12に示す監視装置104の動作を説明する。伝送部163では、監視カメラ102(102a,102b)から送信されてくる画像データ(圧縮画像データ)およびメタデータが受信される。この画像データは、記録再生処理部165および画像データ処理部164に供給される。一方、メタデータは、記録再生処理部165および制御部161に供給される。ユーザの設定により、記録指示がなされている場合には、当該画像データおよびメタデータは記録再生処理部165により、ストレージ168に記録される。
【0118】
画像データ処理部164では、伝送部163から供給される画像データに対して、データ伸長処理が施されて、出力用の画像データが生成される。また、制御部161は、伝送部163から供給されるメタデータに基づいて、OSD部166を制御し、当該OSD部166から、監視カメラ102の検知部206、207における検知情報等を表示するための表示信号を発生させる。
【0119】
合成部167では、画像データ処理部164で得られた画像データに、OSD部166で発生された表示信号が合成され、その合成信号はモニタ169に供給される。これにより、モニタ169には、監視カメラ102(102a,102b)で撮像された監視画像に対応した画像が表示される。そして、その画像上に、例えば、監視カメラ102の検知部206,207における検知情報等がOSD表示される。
【0120】
また、ストレージ168からの画像データおよびメタデータの再生時には、再生された画像データは記録再生処理部165を介して画像データ処理部164に供給され、再生されたメタデータは記録再生処理部165を介して制御部161に供給される。以下は、上述した伝送部163で受信された画像データおよびメタデータに対する動作と同様にして、モニタ169に再生された画像データによる画像が表示されると共に、その画像上に、例えば、監視カメラ102の検知部206,207における検知情報等がOSD表示される。
【0121】
上述したように、図3に示す監視カメラシステム100においては、監視カメラ102(102a,102b)から監視装置104に画像データおよびメタデータが送信される。このメタデータには、検知部206,207の検知状態を示す情報(検知ステータス)および検知部206,207で検知された動体または不動体に関する情報(オブジェクト数、オブジェクト情報等)が含まれている。そのため、監視装置104側では、監視カメラ102(102a,102b)の検知部206,207における検知状態(「検知中」、「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等)を認識でき、その後の処理、例えば、上述したように、当該検知状態をモニタ169にOSD表示する処理を行うことができる。
【0122】
また、監視装置104側では、検知部206,207の検知状態を示す情報(検知ステータス)に基づいて、検知部206,207が検知を停止している期間(例えば「映像異常」、「機器異常」等の期間)、に対応した画像データを処理し、動体または不動体を検知する処理を行うことができる。この検知処理、および上述の表示処理は制御部161により行われる。この場合、制御部161は、データ処理部を構成する。
【0123】
図13は、監視カメラ102から監視装置104に送信されて記録される画像データおよび動体の検知情報の一例を示している。
【0124】
第nフレームでは、動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報(オブジェクト数が0を示し、オブジェクト情報を持たない)を含むメタデータが送信されて記録される。第n+1フレーム、第n+2フレームでは、動体検知によって動体が検知され、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体ありの情報(オブジェクト数が1以上の数を示し、オブジェクト数に対応した個数のオブジェクト情報を持つ)を含むメタデータが送信されて記録される。
【0125】
第n+3フレームでは、動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報を含むメタデータが送信されて記録される。第n+4フレーム〜第n+6フレームでは、何らかの原因で動体検知が停止されており、第n+4フレームでのみ、「検知停止中」を示す検知ステータス(「背景取得中」、「PTZ動作中」、「映像異常」、「機器異常」等)と、動体なしの情報を含むメタデータが送信されて記録される。第n+7フレームでは、動体検知が再開されるが、当該動体検知によって動体が検知されず、監視カメラ102から監視装置104には、「検知中」を示す検知ステータスと、動体なしの情報を含むメタデータが送信されて記録される。
【0126】
このように、監視カメラ102の検知部206でなんらかの原因で動体検知が停止される場合、その停止期間の最初のフレームで「検知停止中」を示す検知ステータスを含むメタデータが監視カメラ102から監視装置104に送信されて記録される。そのため、監視装置104側では、メタデータに含まれる検知ステータス(検知部の検知状態を示す情報)を用いて、動体検知が停止されている期間に対応した画像データを特定でき、当該画像データを処理して動体の検知処理を行うことができる。この場合、検知停止期間内の第n+5フレームに動体MOがあった場合、監視装置104側における検知処理により、当該動体MOの検知が可能となる。
【0127】
なお、上述実施の形態においては、監視装置104側で監視カメラ102から送信されてくるメタデータに含まれる検知ステータス(検知部の検知状態を示す情報)を利用する処理として、検知状態を画像上にOSD表示する処理、検知停止期間の画像データから動体または不動体を検知する処理を述べたが、当該検知ステータスを利用した処理は、これに限定されるものではない。例えば、その他に、この検知ステータスを利用して、監視装置側に画像データおよびメタデータを送っている監視カメラが何らかの理由で検知停止の状態となった場合に、他の監視カメラから画像データおよびメタデータを送ってもらうようにカメラの切り替え処理を行うことができる。
【産業上の利用可能性】
【0128】
この発明は、例えば監視カメラからネットワークを介して接続された監視装置に、画像データ、および検知された動体または不動体に関する情報を含むメタデータを送る監視カメラ装置に適用できる。
【図面の簡単な説明】
【0129】
【図1】第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムを示すブロック図である。
【図2】監視カメラで生成されて監視装置に送信される、メタデータの1フレーム分を示す図である。
【図3】監視カメラと監視装置とがネットワークを介して接続された監視カメラシステムを示すブロック図である。
【図4】監視カメラの構成例を示すブロック図である。
【図5】動体検知部の具体例を示すブロック図である。
【図6】動体検知部における変化連続性の検出処理を説明するための図である。
【図7】不動体検知部の具体例を示すブロック図である。
【図8】重み付き混合正規分布を説明するための図である。
【図9】画素の輝度の状態を安定クラス、中間クラス、不安定クラスの3つのクラスに分類したときのクラス遷移状態を示す図である。
【図10】背景と車の重みの推移例とクラス分類(不動体を検知)を示す図である。
【図11】背景と車の重みの推移例とクラス分類(不動体を非検知)を示す図である。
【図12】監視装置の構成例を示す機能ブロック図である。
【図13】監視カメラから監視装置に送信されて記録される画像データおよび動体の検知情報の一例を示す図である。
【図14】従来における、監視カメラから記録装置に送信されて記録される画像データおよび動体の検知情報の一例を示す図である。
【符号の説明】
【0130】
10・・・ネットワークシステム、11・・・第1のネットワーク機器、12・・・第2のネットワーク機器、13・・・ネットワーク、100・・・監視カメラシステム、101・・・ネットワーク、102,102a,102b・・・監視カメラ、104・・・監視装置、121・・・制御部、122・・・撮像部、123・・・PTZ制御部、124・・・撮像信号処理部、125・・・画像データ処理部、126・・・動体検知部、127・・・不動体検知部、128・・・メタデータ生成部、129・・・伝送部、161・・・制御部、162・・・ユーザインタフェース部、163・・・伝送部、164・・・画像データ処理部、165・・・記録再生処理部、166・・・OSD部、167・・・合成部、168・・・ストレージ、169・・・モニタ、170・・・設定画面、171・・・画像表示部、172・・・検知選択部、173・・・検知設定部、174-1〜174-3・・・チェックボックス、175・・・しきい値設定スライドバー、176・・・検知枠、177・・・動体、178・・・動体検知インジケータ、179・・・しきい値表示部、180・・・OKボタン
【特許請求の範囲】
【請求項1】
他のネットワーク機器にネットワークを介して接続されたネットワーク機器であって、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記他のネットワーク機器に送信するデータ送信部と
を備えることを特徴とするネットワーク機器。
【請求項2】
監視画像を撮像し、該監視画像に対応した画像データを生成する画像データ生成部をさらに備え、
上記検知部は、上記画像データ生成部で生成された画像データを処理して、上記動体または不動体を検知する
ことを特徴とする請求項1に記載のネットワーク機器。
【請求項3】
他のネットワーク機器にネットワークを介して接続されたネットワーク機器であって、
上記他のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有し、
上記メタデータは、動体または不動体を検知する上記他のネットワーク機器の検知部の検知状態を示す情報および該検知部で検知された動体または不動体に関する情報を含み、
上記検知部の検知状態を示す情報を利用した処理を行うデータ処理部をさらに有する
ことを特徴とするネットワーク機器。
【請求項4】
上記データ処理部は、上記検知部の検知状態を示す情報を利用して、上記他のネットワーク機器の検知部が検知を停止している期間に対応した上記画像データを処理し、動体または不動体を検知する処理を行う
ことを特徴とする請求項3に記載のネットワーク機器。
【請求項5】
上記データ処理部は、上記検知部の検知状態を示す情報を利用して、該検知部の検知状態を、上記画像データによる画像に対応させて表示する処理を行う
ことを特徴とする請求項3に記載のネットワーク機器。
【請求項6】
第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムであって、
上記第1のネットワーク機器は、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記第2のネットワーク機器に送信するデータ送信部とを有し、
上記第2のネットワーク機器は、
上記第1のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とするネットワークシステム。
【請求項7】
監視カメラと監視装置とがネットワークを介して接続された監視カメラシステムであって、
上記監視カメラは、
監視画像を撮像し、該監視画像に対応した画像データを生成する画像データ生成部と、
上記画像データ生成部で生成された画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データ生成部で生成された画像データおよび上記メタデータ生成部で生成されたメタデータを上記監視装置に送信する送信部とを有し、
上記監視装置は、
上記監視カメラから送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とする監視カメラシステム。
【請求項1】
他のネットワーク機器にネットワークを介して接続されたネットワーク機器であって、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記他のネットワーク機器に送信するデータ送信部と
を備えることを特徴とするネットワーク機器。
【請求項2】
監視画像を撮像し、該監視画像に対応した画像データを生成する画像データ生成部をさらに備え、
上記検知部は、上記画像データ生成部で生成された画像データを処理して、上記動体または不動体を検知する
ことを特徴とする請求項1に記載のネットワーク機器。
【請求項3】
他のネットワーク機器にネットワークを介して接続されたネットワーク機器であって、
上記他のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有し、
上記メタデータは、動体または不動体を検知する上記他のネットワーク機器の検知部の検知状態を示す情報および該検知部で検知された動体または不動体に関する情報を含み、
上記検知部の検知状態を示す情報を利用した処理を行うデータ処理部をさらに有する
ことを特徴とするネットワーク機器。
【請求項4】
上記データ処理部は、上記検知部の検知状態を示す情報を利用して、上記他のネットワーク機器の検知部が検知を停止している期間に対応した上記画像データを処理し、動体または不動体を検知する処理を行う
ことを特徴とする請求項3に記載のネットワーク機器。
【請求項5】
上記データ処理部は、上記検知部の検知状態を示す情報を利用して、該検知部の検知状態を、上記画像データによる画像に対応させて表示する処理を行う
ことを特徴とする請求項3に記載のネットワーク機器。
【請求項6】
第1のネットワーク機器と第2のネットワーク機器とがネットワークを介して接続されたネットワークシステムであって、
上記第1のネットワーク機器は、
画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データおよび上記メタデータ生成部で生成されたメタデータを上記第2のネットワーク機器に送信するデータ送信部とを有し、
上記第2のネットワーク機器は、
上記第1のネットワーク機器から送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とするネットワークシステム。
【請求項7】
監視カメラと監視装置とがネットワークを介して接続された監視カメラシステムであって、
上記監視カメラは、
監視画像を撮像し、該監視画像に対応した画像データを生成する画像データ生成部と、
上記画像データ生成部で生成された画像データを処理し、動体または不動体を検知する検知部と、
上記検知部の検知状態を示す情報および上記検知部で検知された動体または不動体に関する情報を含むメタデータを生成するメタデータ生成部と、
上記画像データ生成部で生成された画像データおよび上記メタデータ生成部で生成されたメタデータを上記監視装置に送信する送信部とを有し、
上記監視装置は、
上記監視カメラから送信されてくる画像データおよびメタデータを受信するデータ受信部と、
上記データ受信部で受信された画像データおよびメタデータを記録するデータ記録部とを有する
ことを特徴とする監視カメラシステム。
【図1】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図3】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図3】
【公開番号】特開2008−187328(P2008−187328A)
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願番号】特願2007−17489(P2007−17489)
【出願日】平成19年1月29日(2007.1.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成20年8月14日(2008.8.14)
【国際特許分類】
【出願日】平成19年1月29日(2007.1.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]