
ノイズ除去装置、重量測定装置、ノイズ除去方法、及びディジタルフィルタの設計方法
【課題】ノイズ周波数が変化しやすい場合であっても、フィルタリングに必要な回路の規模を増大させることなく、簡単にかつ適切にノイズ除去できるフィルタリング技術を提供する。
【解決手段】重量測定装置のフィルタ係数演算部6は、所定の演算式を用いてフィルタ係数を求めて信号処理部5へ出力する。信号処理部5はそのフィルタ係数を用いて、計量信号Dsに対してフィルタリングを実行する。上記演算式は、部分的に減衰量を大きくすべき減衰帯域の帯域位置を指定するスペクトルパラメータを含んでおり、ユーザーはデータ入力部7を介して、その値を入力することができる。スペクトルパラメータによる個々の帯域指定は、正規化角周波数の下限値ではなく、その中心周波数からのずれ量(変位量)として与えられる。
【解決手段】重量測定装置のフィルタ係数演算部6は、所定の演算式を用いてフィルタ係数を求めて信号処理部5へ出力する。信号処理部5はそのフィルタ係数を用いて、計量信号Dsに対してフィルタリングを実行する。上記演算式は、部分的に減衰量を大きくすべき減衰帯域の帯域位置を指定するスペクトルパラメータを含んでおり、ユーザーはデータ入力部7を介して、その値を入力することができる。スペクトルパラメータによる個々の帯域指定は、正規化角周波数の下限値ではなく、その中心周波数からのずれ量(変位量)として与えられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ディジタルフィルタによるフィルタリング技術に関する。
【背景技術】
【0002】
物品重量を測定する重量測定装置では、歪みゲージ式のロードセルやフォースバランスなどの重量センサーが使用される。この重量センサーは、物品重量と風袋重量との和の重量の影響を受ける固有振動数をもつ。この固有振動数を含む帯域の外部振動が計量系に作用したとき、その外部振動はその固有振動数付近で増幅され、振動ノイズとなって、重量センサーから出力される計量信号中に出現する。以後、この振動ノイズを、「固有振動ノイズ」と呼ぶ。
【0003】
また、搬送系の荷重測定を行う場合には、例えば、ベルトコンベヤーを駆動するモーターや搬送ローラなどの回転系振動に起因するノイズや、商用電源などに起因する電気的なノイズなどが、振動ノイズとして計量信号に重畳されている。
【0004】
近年の重量測定装置では、計量信号に含まれる上記振動ノイズの除去のために、経年変化や周辺環境などの影響を受け難く、フィルタ特性を比較的容易に変更できるディジタルフィルタが採用されており、その中でも、特に安定性に優れた有限インパルス応答(FIR)型のフィルタ(FIRフィルタ)が好まれて使用される。
【0005】
上述のように、重量センサーの固有振動数は物品重量及び風袋重量の影響を受けるため、物品重量あるいは風袋重量が変化した場合には、固有振動ノイズの周波数も変化する。以前では、コンベヤー等の風袋重量が支配的であったため、物品重量の変化による固有振動ノイズの周波数変化を無視することができたが、近年、軽い物品を高精度に重量測定したいという要請から、風袋重量が軽くなり、かかる周波数変化を無視することができなくなってきた。また、モーターや搬送ローラなどに起因する振動ノイズの周波数は、搬送系の仕様、例えば搬送速度などによって変化する。そのため、被計量物の種類や大きさなど、または搬送系の仕様変更によって振動ノイズの周波数が変化した場合であっても、かかる振動ノイズを確実に除去することが可能なディジタルフィルタが望まれる。
【0006】
そこで従来では、多段の移動平均フィルタで構成されたディジタルフィルタを採用して、計量信号中の振動ノイズを確実に除去する技術が下記特許文献1に提案されている。
【0007】
特許文献1で開示されている技術は、各移動平均フィルタの移動平均数を互いに異ならせることによって、振動ノイズが変化するであろう周波数範囲内に複数のノッチを設けて、振動ノイズを確実に除去する手法である。
【0008】
なお、FIRフィルタの設計方法として、逐次射影法を用いる技術が下記の非特許文献1に記載されている。
【0009】
【特許文献1】特公平6−21814号公報
【非特許文献1】相川直幸、外2名,「データ伝送のためのFIR送信・受信フィルタの設計」,電子情報通信学会論文誌,1996年3月,Vol.J79-A No.3,p.608−615
【発明の開示】
【発明が解決しようとする課題】
【0010】
上記特許文献1の手法では、ディジタルフィルタの設計段階で、振動ノイズが変化するであろう周波数範囲を想定し、かかる周波数範囲に応じて移動平均フィルタの段数を決定している。そのため、ディジタルフィルタ設計後の仕様の追加などによって、振動ノイズが、予め想定していた周波数範囲からずれるような場合には、ディジタルフィルタを最初から設計し直す必要があった。
【0011】
また、重量測定装置での仕様の追加などを予め考慮してディジタルフィルタを設計する場合には、多くの段数の移動平均フィルタを事前に用意する必要があり、ディジタルフィルタの回路規模が増大する。
【0012】
また、特許文献1とは異なる手法として、異なる減衰特性を示すフィルタ係数を予め複数記憶しておき、仕様変更などにより振動ノイズの周波数が変化するたびに、かかる周波数に対応したフィルタ係数を呼び出して使用する手法が提案されている。しかし、このような場合であっても、広い周波数範囲の振動ノイズを確実に除去するためには、多くのフィルタ係数を事前に記憶しておく必要があり、フィルタ係数を記憶するメモリの回路規模が増大する。
【0013】
そこで本発明は、上述の問題に鑑みて成されたものであって、ノイズ周波数が変化しやすい場合であっても、フィルタリングに必要な回路の規模を増大させることなく、簡単にかつ適切にノイズ除去できるフィルタリング技術を提供することを目的とする。
【課題を解決するための手段】
【0014】
第1の発明に係るノイズ除去装置は、ディジタル信号のフィルタリングを、可変のフィルタ係数を用いて実行する信号処理部と、所定の演算式を用いて前記フィルタ係数を求めて前記信号処理部に出力するフィルタ係数演算部とを備え、前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、前記フィルタ係数演算部が、入力される前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更することによって、前記複数の減衰帯域の各々の帯域位置を、前記パラメータで指定される所望の帯域位置へと独立に変更可能であることを特徴とする。
【0015】
第2の発明に係るノイズ除去装置は、第1の発明に係るノイズ除去装置において特に、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【0016】
第3の発明に係るノイズ除去装置は、第1又は第2の発明に係るノイズ除去装置において特に、前記パラメータに関して、前記ノイズ除去装置の外部からの値の入力を受け付けるデータ入力部を更に備え、前記データ入力部は、受け付けた前記パラメータの値を前記フィルタ係数演算部に出力することを特徴とする。
【0017】
第4の発明に係るノイズ除去装置は、第1〜第3のいずれか一つの発明に係るノイズ除去装置において特に、前記信号処理部は、前記フィルタリングを、有限インパルス応答(FIR)型のディジタルフィルタで実行することを特徴とする。
【0018】
第5の発明に係る重量測定装置は、第1〜第4のいずれか一つの発明に係るノイズ除去装置と、被計量物の重量を検出する計量部とを備え、前記ノイズ除去装置は、前記計量部による計量結果として得られたディジタル信号を対象としてフィルタリングを実行することを特徴とする。
【0019】
第6の発明に係るノイズ除去方法は、(a)所定の演算式を用いてフィルタ係数を求める工程と、(b)ディジタル信号のフィルタリングを、前記工程(a)で求められた前記フィルタ係数を用いて実行する工程とを備え、前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、前記工程(a)は、(a−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、前記工程(a−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする。
【0020】
第7の発明に係るノイズ除去方法は、第6の発明に係るノイズ除去方法において特に、前記工程(a−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【0021】
第8の発明に係るノイズ除去方法は、第6又は第7の発明に係るノイズ除去方法において特に、(c)前記パラメータの値の入力を受け付ける工程を更に備え、前記工程(a−1)において、前記工程(c)で受け付けられた前記パラメータの値を前記演算式に代入することを特徴とする。
【0022】
第9の発明に係るディジタルフィルタの設計方法は、振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置が可変のディジタルフィルタの設計方法であって、(a)前記ディジタルフィルタの理想振幅特性から、基準フィルタ係数の複数の系列を求める工程と、(b)前記基準フィルタ係数の複数の系列に基づいて、前記ディジタルフィルタのフィルタ係数を、前記減衰帯域の帯域位置を指定するパラメータを含む所定の演算式で近似する工程と、(c)前記演算式を用いて前記フィルタ係数を求める工程とを備え、前記工程(c)は、(c−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、前記工程(c−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする。
【0023】
第10の発明に係るディジタルフィルタの設計方法は、第9の発明に係るディジタルフィルタの設計方法において特に、前記工程(c−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【発明の効果】
【0024】
第1及び第6の発明によれば、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータを用いてフィルタ係数を変更できるようになっているため、減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、変化しやすい計量信号のノイズ周波数を、簡単にかつ適切にフィルタリングできる。更に、フィルタ係数は演算式で表現されているため、多段のフィルタを準備したり、異なる特性を示すフィルタ係数を予め記憶しておく必要がない。従って、フィルタリングに必要な回路の規模を低減することができ、ローコストの重量測定装置をユーザーに提供できる。また、複数の減衰帯域を指定できるため、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合にも、適切に対応可能である。
【0025】
第2、第7、及び第10の発明によれば、フィルタ設計時に複数のパラメータを同じように近似することができ、結果として所望のフィルタ設計を実現できる。
【0026】
第3及び第8の発明によれば、ユーザーが阻止域の減衰帯域を簡単に変更することができる。
【0027】
第4の発明によれば、FIR型のディジタルフィルタを用いることで動作安定性に優れたフィルタリングを実行できる。
【0028】
第5の発明によれば、適切にノイズをフィルタリング可能な重量測定装置を得ることができる。
【0029】
第9の発明によれば、減衰帯域の帯域位置という物理的に把握しやすいパラメータを用いてフィルタ係数を変更するため、減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、ノイズ周波数が変化しやすい場合であっても、本発明の設計方法を採用することによって、簡単にかつ適切にノイズ除去できる。更に、フィルタ係数は演算式で表現されているため、フィルタを多段で構成する必要がない。従って、ディジタルフィルタの回路規模を低減することができる。また、複数の減衰帯域を指定できるため、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合にも、適切に対応可能である。
【発明を実施するための最良の形態】
【0030】
<本発明の前提技術の説明>
本発明の実施の形態を説明する前に、まず、本発明の前提技術となる重量測定装置について説明する。なお、本前提技術は、本願出願人による特開2004−150883号公報に開示されている。
【0031】
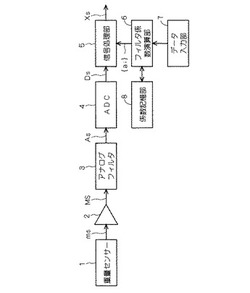
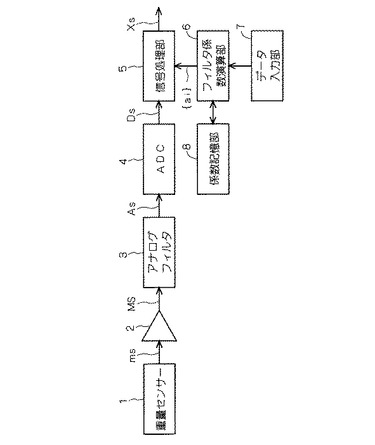
図1は、本前提技術に係る重量測定装置の構成を示すブロック図である。図1に示すように、本前提技術に係る重量測定装置は、歪みゲージ式のロードセルやフォースバランスなどの重量センサー1と、アンプ2と、アナログフィルタ3と、A/D変換器(以後「ADC」と呼ぶ)4と、信号処理部5と、フィルタ係数演算部6と、データ入力部7と、係数記憶部8とを備えている。
【0032】
重量センサー1は、計量系から受けた被計量物の重量を検出して、その結果を測定信号msとしてアンプ2に出力する。アンプ2は、入力された測定信号msを増幅して増幅信号MSとしてアナログフィルタ3に出力する。アナログフィルタ3は、その増幅信号MSから不要な高域成分を除去してアナログ信号Asとして出力する。ADC4は、アナログフィルタ3から出力されるアナログ信号Asに対して所定のサンプリング周期でサンプリングし、所定の量子化ビット数で量子化したテジタル信号を計量信号Dsとして信号処理部5に出力する。
【0033】
信号処理部5は、FIRフィルタを用いて、入力された計量信号Dsをフィルタリングし、その結果を信号Xsとして図示しないマイクロコンピュータに出力する。そして、マイクロコンピュータが信号Xsに基づいて被計量物の重量を計算し、図示しない表示部に表示する。なお、一般に2N次のFIRフィルタの周波数応答H(ejω)は以下の式(1)で示される。
【0034】
【数1】

【0035】
ただし、ai(i=0,1,2,・・・,N)はフィルタ係数である。また、ωは正規化角周波数であって、フィルタリング時のデータのサンプリング周波数で正規化した角周波数である。本前提技術で言えば、信号処理部5でのフィルタリング時のデータのサンプリング周波数で正規化した角周波数である。以後「正規化角周波数」と言えば、このようにサンプリング周波数で正規化した角周波数を意味するものとする。
【0036】
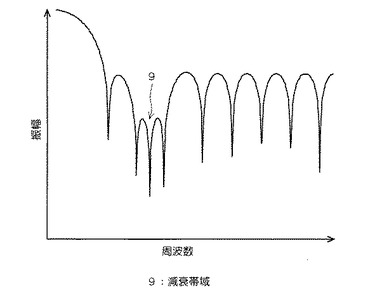
図2は、信号処理部5でのフィルタリングの振幅特性の一例を示す図である。図2に示されるように、信号処理部5で用いられるFIRフィルタはローパスフィルタであって、その振幅特性の阻止域において、部分的に減衰量が大きい減衰帯域9が存在する。そして、本前提技術に係る重量測定装置は、この減衰帯域9の帯域位置を変更できる機能を備えている。つまり、減衰帯域9の位置を周波数の高い方へ移動させたり、低い方へ移動させたりできる機能を備えている。なお、以後単に「減衰帯域」と言えば、図2に示される減衰帯域9のように、阻止域において部分的に減衰量を大きくすべき減衰帯域を意味するものとする。
【0037】
フィルタ係数演算部6は、上記式(1)中のフィルタ係数aiの系列{ai}を以下の演算式(2)を用いて求めて、信号処理部5へ出力する。
【0038】
【数2】
【0039】
ただし、gi,j(j=0,1,2,・・・,M)は係数である。またxは、減衰帯域の帯域位置を指定するパラメータであって、代入される値は、減衰帯域の帯域位置に対応している。式(2)に示されるように、フィルタ係数aiはパラメータxについての多項式で表現されている。ここで、式(2)を式(1)に代入すると、周波数応答H(ejω)は以下の式で表される。
【0040】
【数3】
【0041】
係数記憶部8は、例えばROM(Read-Only Memory)であって、係数gi,jの値を予め記憶している。そして、この係数gi,jの値はフィルタ係数演算部6によって係数記憶部8から読み出される。
【0042】
データ入力部7は、例えばキーボードであって、ユーザーによる重量測定装置の外部からのパラメータxの値の入力を受け付ける。そして、受け付けたパラメータxの値をフィルタ係数演算部6に出力する。
【0043】
次に、本前提技術に係る重量測定装置における被計量物の重量測定動作について図3を参照して説明する。
【0044】
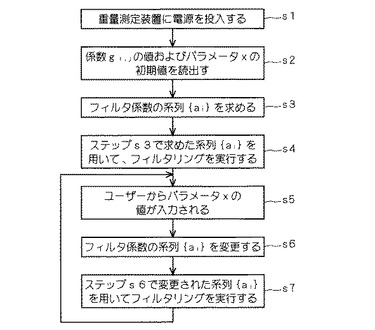
図3に示されるように、ステップs1において重量測定装置に電源が投入されると、ステップs2において、フィルタ係数演算部6は係数記憶部8から係数gi,jの値を読み出す。そしてフィルタ係数演算部6は、予め内部に記憶しているパラメータxの初期値を読み出す。
【0045】
次にステップs3において、フィルタ係数演算部6は、係数gi,j及びパラメータxの値を式(2)に代入してフィルタ係数の1つの系列{ai}を求め、信号処理部5へ出力する。これにより、信号処理部5でのフィルタ特性における減衰帯域の帯域位置が、パラメータxで指定される初期位置に設定される。なおこのとき、フィルタ係数aiの演算式(2)は多項式で表現されているため、迅速にフィルタ係数aiを求めることができる。
【0046】
次にステップs4において、信号処理部5はステップs3で求められたフィルタ係数の系列{ai}を用いて、計量信号Dsに対してフィルタリングを実行する。そして、その結果を信号Xsとしてマイクロコンピュータに出力し、当該マイクロコンピュータが被計量物の重量をCRTなどの表示部に表示する。
【0047】
次にステップs5において、データ入力部7は、重量測定装置のユーザーによってパラメータxの値が入力されると、その値をフィルタ係数演算部6に出力する。
【0048】
上述のように、被計量物の種類の変更などによって重量センサー1の固有振動数が変化し、計量信号Dsに含まれる固有振動ノイズの周波数が変化するため、かかる固有振動ノイズを確実に除去するために、ユーザーは、変化後の固有振動数を含む帯域位置を示すパラメータxの値を入力する。例えば、被計量物の種類ごとに重量センサー1の固有振動数の情報を予め準備しておき、被計量物の種類を変更する際に、ユーザーはこの情報を参照して、パラメータxの値をデータ入力部7に入力する。
【0049】
なおここでは、パラメータxの値をデータ入力するように構成しているが、例えば重量チェッカーのような計量装置ではコンベア速度が決まれば減衰させたい周波数が決定するので、自動的にパラメータxを設定するように構成してもよい。また、測定信号の振動波形のFFT等によって周波数解析を行い、最も振幅の大きいところを検出して自動的にパラメータxを設定するという構成にしてもよい。
【0050】
次にステップs6において、フィルタ係数演算部6は、受け取ったパラメータxの値を式(2)に代入してフィルタ係数の系列{ai}を変更し、信号処理部5へ出力する。これにより、信号処理部5でのフィルタ特性における減衰帯域の帯域位置が、パラメータxで指定される帯域位置へと変更される。そして、ステップs7において、信号処理部5はステップs6で変更されたフィルタ係数の系列{ai}を用いてフィルタリングを実行し、その結果を信号Xsとして出力する。
【0051】
ユーザーは、減衰帯域の帯域位置を再度変更する必要がある場合には、データ入力部7にパラメータxの新たな値を入力する。そして、ステップs6,s7が実行されて、減衰帯域の帯域位置はパラメータxで指定される帯域位置に変更される。
【0052】
このように、本前提技術に係る重量測定装置では、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータxを用いてフィルタ係数aiを変更できるようになっている。そのため、重量センサー1の固有振動数の変化等によって、信号処理部5での減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、変化しやすい計量信号Dsのノイズ周波数を、簡単にかつ適切にフィルタリングできる。
【0053】
更に、式(2)に示されるように、フィルタ係数aiは所定の演算式で表現されているため、特許文献1に記載の従来技術のように多段のフィルタを準備したり、異なる特性を示すフィルタ係数を予め記憶しておく必要がない。従って、フィルタリングに必要な回路の規模を低減することができ、ローコストの重量測定装置をユーザーに提供できる。
【0054】
次に、係数gi,jの値の決定方法について説明する。まず、減衰帯域の帯域位置が可変のFIRフィルタについて、以下の理想振幅特性M(ejω,ψ)と重み関数W(ejω,ψ)とを考える。
【0055】
【数4】
【0056】
ただし、ωpは通過域正規化角周波数、ωsは阻止域端正規化角周波数、wは減衰帯域の帯域幅、ψは減衰帯域の帯域位置をコントロールするパラメータであって、ωs<ψ<π−wである。
【0057】
本前提技術では、上述の式(4)にも示されるように、理想振幅特性における減衰帯域は、角周波数ψ〜(ψ+w)までの周波数範囲にわたって存在し、パラメータψの値によって、その帯域位置が特定される。ここで、理想振幅特性における減衰帯域の帯域位置を「基準帯域位置」と呼ぶ。
【0058】
次に、パラメータψに代入される値ψk(k=0,1,2,・・・,K)のそれぞれについて最適フィルタを設計する。なお値ψkは、kの値が大きいほど大きい値を示す。本前提技術では、逐次射影法を用いて最適フィルタを設計する。以下に具体的に説明する。
【0059】
各値ψkにおけるフィルタ係数aiをai,kとすると、各値ψkにおけるディジタルフィルタの周波数応答H(ejω,ψk)は以下の式(6)で示される。
【0060】
【数5】
【0061】
そして、フィルタ係数ai,kを逐次射影法で求めるために、n回目の繰り返し誤差e(ω)を以下の式(7)で表す。
【0062】
【数6】
【0063】
ただし、M(ω)は理想振幅特性M(ejω,ψ)である。なお、フィルタ係数ai,kの右肩のnは単に繰り返し数を示すものであり、指数を示すものではない。
【0064】
ここで、最も仕様を満たさない点をωM、理想振幅特性からの許容誤差をλ(ω)とすると、以下の式が成立する。
【0065】
【数7】
【0066】
重み関数W(ejω,ψ)=1のときの許容誤差をδとして、λ(ω)を以下の式(9)で表す。
【0067】
【数8】
【0068】
ただし、W(ω)は重み関数W(ejω,ψ)である。
【0069】
式(9)及び上述の式(5)に示されるように、最適フィルタを設計する際に採用される、理想振幅特性の減衰帯域における許容誤差は、重み関数によって、他の帯域における許容誤差の1/10倍に設定される。
【0070】
そして、逐次射影法における係数更新に、以下の式(10)を使用する。
【0071】
【数9】
【0072】
ただし、eMはe(ωM)である。
【0073】
この式(10)を用いて、収束するまで、すなわちeM≦λ(ωM)となるまでフィルタ係数の更新を繰り返して、最適なフィルタ係数ai,kを求める。
【0074】
このようにして、パラメータψに値ψ0,ψ1,・・・,ψKを代入した際の理想振幅特性と重み関数とから、フィルタ係数ai,kのK個の系列{ai,0},{ai,1},・・・,{ai,K}をそれぞれ求める。ここで、理想振幅特性と重み関数とから求められた最適なフィルタ係数ai,kを、基準フィルタ係数ai,k’(k=0,1,2,・・・,K)とする。
【0075】
次に、式(2)中のM次多項式bi(x)で、基準フィルタ係数ai,k’を最小二乗的に近似を行って、係数gi,jの値を決定する。
【0076】
そこで、まずパラメータxに値ψkを代入したときのb0(ψk)と、基準フィルタ係数a0,k’について考えると、
【0077】
【数10】
【0078】
が最小となるベクトルB0=[g0,0 g0,1 ・・・ g0,M]Tを求めることが統計学的に好ましい性質を持つことが知られている。具体的な計算方法としては、以下の式(12)で与えられる極大極小の条件を連立方程式として、g0,0,g0,1,・・・,g0,Mについて解く。
【0079】
【数11】
【0080】
そして、式(12)を正規方程式で表現すると以下のようになる。
【0081】
【数12】
【0082】
式(12)の行列Xは値ψkから求まり、ベクトルA0,kは逐次射影法で求めた基準フィルタ係数ai,k’から求まるため、左辺の(XTX)及び右辺の(XTA0,k)を求めることができる。従って、ベクトルB0を求めることができる。
【0083】
同様の手順で、b1(ψk)と基準フィルタ係数a1,k’,b2(ψk)と基準フィルタ係数a2,k’,・・・,bN(ψk)と基準フィルタ係数aN,k’について考えて、ベクトルBi=[gi,0 gi,1 ・・・ gi,M]Tを求める。
【0084】
本前提技術では、このようにして求められた値を、式(2)中の係数gi,jの値として採用することによって、パラメータxによる減衰帯域の帯域位置の指定が可能となる。
【0085】
また本前提技術では、理想振幅特性を式(4)のように定義した場合、ユーザーが入力することができるパラメータxの値の範囲は、ψ0≦x≦ψKとする。例えば、ユーザーがデータ入力部7に対して、パラメータxの値として値ψ0を入力すると、減衰帯域について、周波数ψ0〜(ψ0+w)までで規定される帯域位置が指定される。また、ユーザーが値ψKを入力すると、周波数ψK〜(ψK+w)までで規定される帯域位置が指定される。
【0086】
このように、パラメータxによって、ψ=ψ0における理想振幅特性の基準帯域位置から、ψ=ψKにおける理想振幅特性の基準帯域位置までの周波数範囲内で、ユーザーは減衰帯域の帯域位置を指定することができる。そして、パラメータxの値と、減衰帯域の帯域位置との対応表を予め準備することによって、ユーザーは簡単に希望の帯域位置を指定することができる。
【0087】
なお上述のように、重み関数W(ejω,ψ)は、最適フィルタを設計する際に使用される許容誤差の各周波数領域における重みを決定しているため、信号処理部5でのフィルタ特性における減衰帯域の減衰量は、この重み関数W(ejω,ψ)のψ≦|ω|≦ψ+wの値によって指定される。本前提技術では、式(5)に示されるように、信号処理部5での減衰帯域の減衰量は、阻止域の他の帯域での減衰量の10倍に設定されている。
【0088】
次に、係数gi,jに具体的数値を代入して、パラメータxの値によって減衰帯域の帯域位置が周波数軸上を具体的にどのように変化するかについて説明する。
【0089】
そこで、一例として以下の条件を考える。
【0090】
【数13】
【0091】
また、0.3π≦ψ≦0.4πを考え、その間を11等分に離散化した値を値ψk(k=0,1,・・・,10)とする。つまり、ψ0=0.3π,ψ1=0.31π,ψ2=0.32π,・・・,ψ10=0.4πとする。従って、パラメータxに代入可能な値の範囲は、0.3π≦x≦0.4πとなる。
【0092】
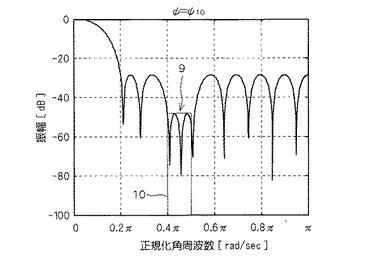
図4〜8は、上述の条件で求められた基準フィルタ係数ai,k’をもつ最適フィルタの振幅特性を示す図であって、それぞれψ=ψ0,ψ2,ψ5,ψ8,ψ10のときの振幅特性を示している。なお図中の実線10は、各図の振幅特性が対応する理想振幅特性の基準帯域位置(周波数ψ〜ψ+w)を示している。
【0093】
図4〜8を参照すると、最適フィルタにおける減衰帯域9の帯域位置がパラメータψの値によって変化すること、また、減衰帯域9以外の阻止域では等リップル特性になっていることが理解できる。
【0094】
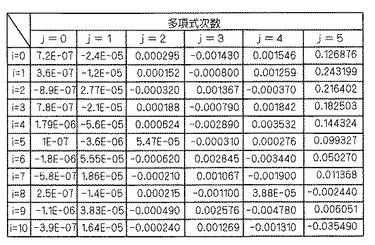
次に、上述の条件で求められた基準フィルタ係数ai,k’を、M=5、すなわち5次の多項式で近似し、係数gi,jの値を決定する。図9はこのときの係数gi,jの値を示している。
【0095】
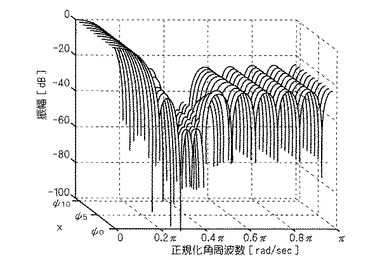
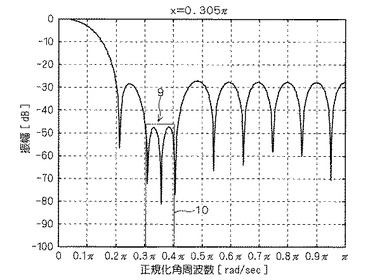
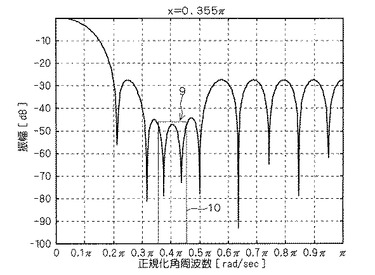
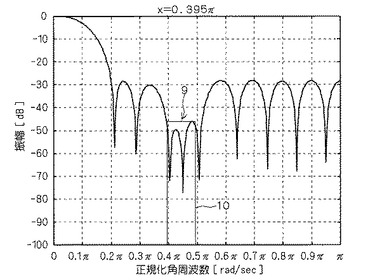
図10〜13は、式(2)の係数gi,jに図9に示す値を採用した際に信号処理部5で実行されるフィルタリングの振幅特性を示す図である。図10は、パラメータxに値ψ0,ψ1,・・・,ψ10を代入したときの特性を示しており、図11〜13は、それぞれパラメータxに0.305π,0.355π,0.395πを代入したときの特性を示している。なお図中の実線10は、図4〜8と同様に、各図の振幅特性が対応する理想振幅特性の基準帯域位置(周波数ψ〜ψ+w)を示している。
【0096】
図11に示されるように、パラメータxに0.305πが代入されると、ほぼ周波数0.305π〜0.405πまでの周波数範囲(実線10の示す範囲)の減衰量が大きくなる。また、図12,13に示されるように、パラメータxに0.355πが代入されると、ほぼ周波数0.355π〜0.455πまでの周波数範囲の減衰量が大きくなり、パラメータxに0.395πが代入されると、ほぼ周波数0.395π〜0.495πまでの周波数範囲の減衰量が大きくなる。
【0097】
このように、図11〜13を参照すると、パラメータxによって指定される帯域位置で、部分的に減衰量が大きくなっていることが理解できる。また、図10〜13を参照すると、減衰帯域9での減衰量が、阻止域における他の帯域の減衰量の約10倍(20dB)であることが理解できる。
【0098】
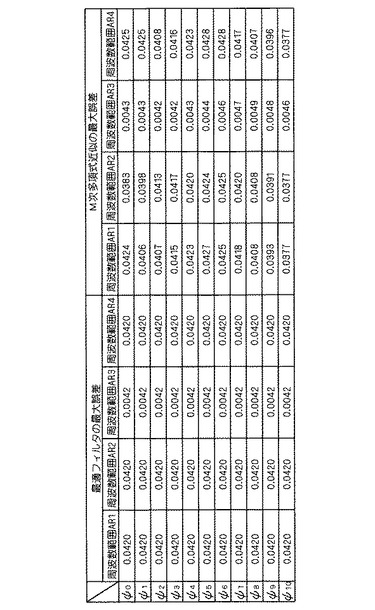
図14は、上述の条件で求められた基準フィルタ係数ai,k’をもつ最適フィルタの振幅特性における最大誤差と、図9に示す係数gi,jを有するM次多項式bi(x)で近似されたフィルタ係数aiをもつフィルタ、つまり信号処理部5でのフィルタの振幅特性における最大誤差とを示す図である。なお、図中の周波数範囲AR1〜AR4は、それぞれ0≦|ω|≦ωp,ωs≦|ω|≦ψk,ψk≦|ω|≦ψk+w,ψk+w≦|ω|≦πを示している。
【0099】
図14に示されるように、基準フィルタ係数の系列{ai,k’}に基づく5次の多項式でフィルタ係数を近似すると、最適フィルタと信号処理部5でのフィルタとの最大誤差はほぼ同様の値を示す。
【0100】
以上のように、本前提技術に係る重量測定装置では、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータxを用いてフィルタ係数aiを変更できるようになっているため、簡単に減衰帯域の帯域位置を変更することができ、変化しやすい計量信号のノイズ周波数を、簡単にかつ適切にフィルタリングできる。
【0101】
なお、係数gi,jを求める際のパラメータψに代入する値ψk(k=0,1,・・・,K)の個数は3つ以上、つまりK≧3の方が望ましい。理由は以下の通りである。
【0102】
本発明では、周波数軸上に幅を有する減衰帯域をパラメ−タxによって移動させるため、パラメータxによって帯域位置として指定可能な周波数範囲(以後、単に「指定周波数範囲」と呼ぶ)の両端だけでなく、その中間部分でも、減衰帯域の帯域幅を所望の帯域幅(式(4)中の帯域幅w)に近づけることが望まれる。
【0103】
そこで、値ψkの個数を3つ以上に設定すると、指定周波数範囲の両端での理想振幅特性、つまりψ=ψ0のときの理想振幅特性及びψ=ψKのときの理想振幅特性だけでなく、中間的な帯域位置での理想振幅特性にも基づいて基準フィルタ係数の系列{ai,k’}を求めることになり、求めた系列{ai,k’}を用いて式(2)の係数gi,jの値を決定することになる。言い換えれば、値ψkの個数を3つ以上に設定すると、指定周波数範囲の両端での理想振幅特性だけでなく、中間的な帯域位置での理想振幅特性に関する情報も利用してフィルタ係数の演算式(2)を導出することになる。そのため、指定周波数範囲の中間部分あたりでも、減衰帯域の帯域幅が理想特性である帯域幅wから大きく外れることがなくなる。
【0104】
また本前提技術では、重量測定装置に関する発明として説明したが、一般的なディジタルフィルタの設計方法に関する発明として上述の内容を捉えることができる。すなわち、減衰帯域の帯域位置が可変のディジタルフィルタを以下の方法で設計する。
【0105】
まず、上述のように理想振幅特性から基準フィルタ係数ai,k’の複数の系列{ai,k’}を求める。そして、求めた系列{ai,k’}を用いて係数gi,jを決定し、ディジタルフィルタのフィルタ係数aiを上述の式(2)で近似する。そして、式(2)のパラメータxに値を代入して、ディジタルフィルタのフィルタ係数aiの系列{ai}を求める。
【0106】
フィルタ特性における減衰帯域の帯域位置を変更したい場合には、パラメータxの値を変更することによってフィルタ係数を変更する。これによって、減衰帯域の帯域位置がパラメータxで指定される帯域位置へと変更される。
【0107】
このようなディジタルフィルタの設計方法を採用することによって、簡単に減衰帯域を変更することが可能になる。従って、ノイズ周波数が変化しやすい場合であっても、簡単にかつ適切にノイズ除去できる。更に、フィルタ係数は演算式で表現されているため、特許文献1の従来技術のようにフィルタを多段で構成する必要がない。従って、ディジタルフィルタの回路規模を低減することができる。
【0108】
<本発明の前提技術の問題点>
上述した前提技術では、例えば式(5)で示されるように、阻止域内で一つの減衰帯域のみが可変である場合が前提とされていた。しかしながら、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合も想定され得る。そこで、以下では、前提技術の手法を用いて、複数の減衰帯域を可変に設定可能なフィルタを設計する場合について説明する。
【0109】
この場合、式(4)との対応において、理想振幅特性は下記の式(21)となる。
【0110】
【数14】
【0111】
また、式(5)との対応において、重み関数は下記の式(22)となる。
【0112】
【数15】
【0113】
ここで、ψ1,ψ2は、各減衰帯域の帯域位置をコントロールするスペクトルパラメータであり、各減衰帯域の正規化角周波数の下限値として与えられる。
【0114】
ψ1,ψ2におけるフィルタ係数をai,j,kとすると、
【0115】
【数16】
【0116】
となる。従って、複数の帯域可変フィルタの伝達関数は、
【0117】
【数17】
【0118】
となる。
【0119】
ここで、前提技術では、複数の減衰帯域そのものの周波数パラメータが設計時に用いられるため、例えば、ψ1=0.3、ψ2=0.8、j=4、k=4の場合を考えると、式(24)において、ψ14=0.34=0.0081、ψ24=0.84=0.4096となる。このように、ψ14はψ24に比べて非常に小さな値となるため、フィルタ設計時にψ1とψ2を同じように近似できず、結果として、ψ1側の帯域において所望の減衰が得られないこととなる。
【0120】
そこで、以下に述べるように本発明の実施の形態では、設計時にψ1とψ2を同じように近似でき、複数の減衰帯域の各々において所望の減衰を得ることが可能なフィルタ設計を実現する。
【0121】
<本発明の実施の形態の説明>
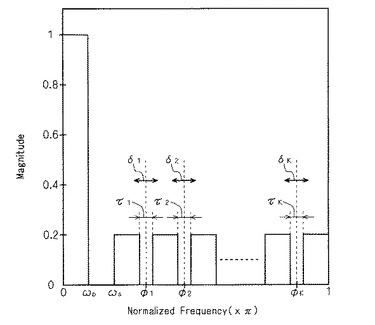
図15に示すように、K個の阻止帯域(減衰帯域)が可変な所望の周波数特性を、
【0122】
【数18】
【0123】
とする。ここで、ωpは通過域端正規化角周波数、ωsは阻止域端正規化角周波数、φ1,φ2,・・・,φKは、大きな阻止域減衰量を必要とする各帯域の中心正規化角周波数、τ1,τ2,・・・,τKは、大きな阻止域減衰量を必要とする各帯域の帯域幅を表す。また、δ1,δ2,・・・,δKは、スペクトルパラメータであり、
【0124】
【数19】
【0125】
で与えられる。また、重み関数を、
【0126】
【数20】
【0127】
とする。ここで、g1,g2,・・・,gKは、大きな阻止域減衰量を必要とする各帯域の重みで、正の実数値である。このように本発明の実施の形態では、スペクトルパラメータによる個々の帯域指定を、上述の前提技術のような周波数の下限値ではなく、その中心周波数からのずれ量(各々の減衰帯域の変化すべき範囲の中心周波数からの変位量)として与えることが特徴である。スペクトルパラメータを中心周波数からのずれ量として与えること以外は、上述の前提技術と基本的に同様であるため、装置構成等の詳細な説明は省略する。
【0128】
上述の所望特性と重みとを有する特性を近似する2N次の複数の阻止域可変直線位相FIRディジタルフィルタの伝達関数の周波数応答は、スペクトルパラメータを用いて、
【0129】
【数21】
【0130】
と表す。ここで、スペクトルパラメータが変化すると、h(i,δ1,δ2,・・・,δK)の値が変化するので、上述の前提技術を拡張して、各スペクトルパラメータに対してそれぞれLi次の多項式を用いて係数を近似することを考える。
【0131】
【数22】
【0132】
例えば、φ1=0.3、φ2=0.8、δ1=0.2,δ2=0.2、l1=4,l2=4とすると、式(29)においてはφ1,φ2ではなくδ1,δ2がパラメータとして与えられているため、δ14=0.0016、δ24=0.0016となり、両者は同じ値となる。従って、フィルタ設計時にはδ1,δ2を同じように近似することができ、結果として所望のフィルタ設計が実現できるようになった。
【0133】
以降では、説明の簡単化のため、K=2の場合の例について述べる。
【0134】
今、式(29)を式(28)に代入した伝達関数の振幅特性|H(ω,φ1,φ2,δ1,δ2)が、式(25)の理想振幅特性と式(27)の重み関数との間で、重み付き最小自乗の意味で最適となる評価関数を、
【0135】
【数23】
【0136】
と与える。ここで、最適な係数g(i,l1,l2)は、式(30)の評価関数が最小となるように求めることである。式(30)の評価関数において、各スペクトルパラメータの変化量をMδ+1個に等分割し、0からπまでの周波数領域をMf+1個に分割すると、以下のような離散化した評価関数が得られる。
【0137】
【数24】
【0138】
離散化した式(31)の評価関数を最小化するため、係数g(p,q,r)に関する偏微分を求め、零とすると、
【0139】
【数25】
【0140】
となる。但し、
【0141】
【数26】
【0142】
である。式(32)及び式(33)を整理すると、
【0143】
【数27】
【0144】
となる。そこで、式(34)において、p=0,1,・・・,N、q=0,1,・・・,L1、r=0,1,・・・,L2を代入し、スペクトルパラメータに関する多次元配列を1次元配列に変換すると、以下の行列が得られる。
【0145】
【数28】
【0146】
但し、
【0147】
【数29】
【0148】
となる。ここで、u=(Mf+1)(Mδ+1)(Mδ+1)、v=(N+1)(L1+1)(L2+1)である。diag[・]は[・]内を要素とする対角行列である。また、行列Aのi,j番目の要素a(i,j)は、
【0149】
【数30】
【0150】
となる。但し
【0151】
【数31】
【0152】
であり、jは以下のように、0から(N+1)(L1+1)(L2+1)まで連続的に変化し、それに対応するl1,j,l2,jは以下のように変化する。
【0153】
【数32】
【0154】
ここで、
【0155】
【数33】
【0156】
はcを超えない最も大きな整数値であり、mod(a,b)はaをbで割ったときの余りを意味する。
【0157】
以上より、最適な係数は、
【0158】
【数34】
【0159】
となる。
【0160】
以下では、具体的な設計例として、大きな減衰量をもつ阻止域が2つ可変可能な以下の仕様を考える。
【0161】
【表1】
【0162】
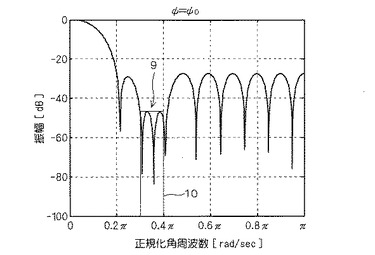
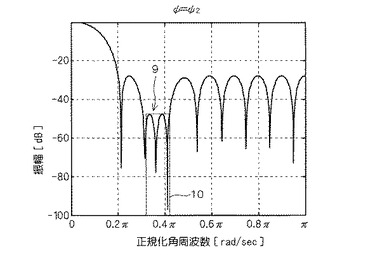
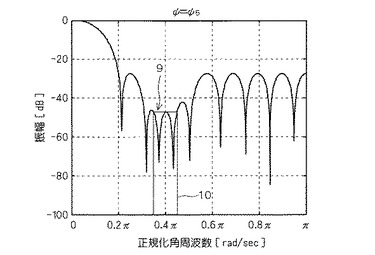
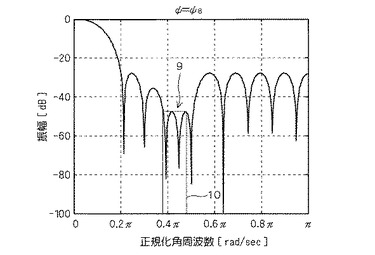
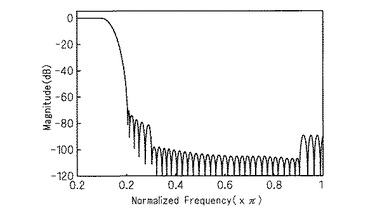
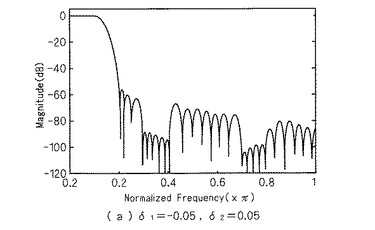
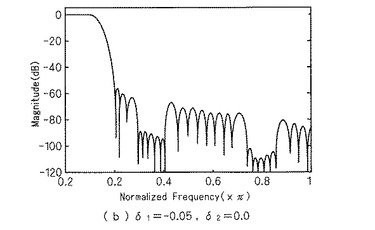
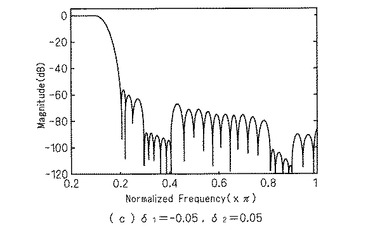
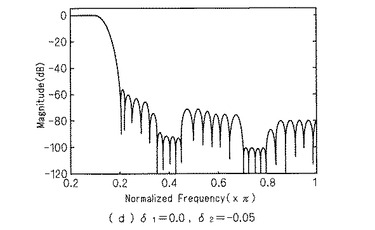
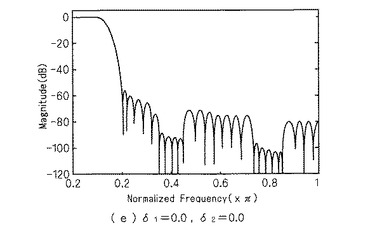
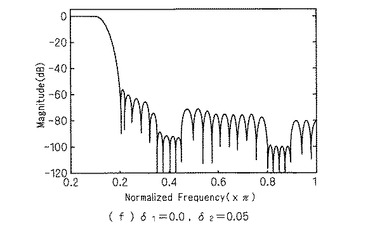
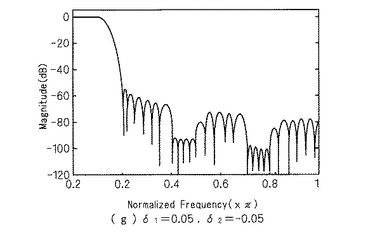
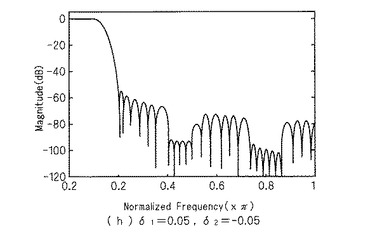
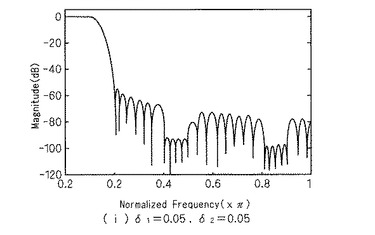
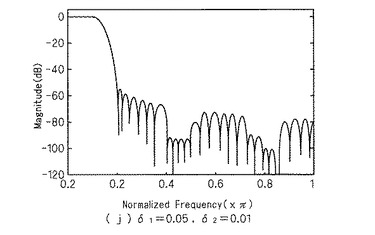
この例において、通過域を20等分、阻止域全体を500等分に離散化した。また、大きな減衰量の角周波数変化量についてもそれぞれ0.05刻みに離散化した。得られた振幅特性を図17〜26に示す。これらの図より、スペクトルパラメータδ1,δ2が変化したとき、振幅特性がそれぞれ変化し、所望の振幅特性に近似していることが分かる。さらに、スペクトルパラメータが変化したときのそれぞれの最大誤差を、下記の表に示す。
【0163】
【表2】
【0164】
また、離散化していない点δ1=0.0,δ2=0.01のときの振幅特性も図26に示す。この図より、離散化していない点でも、小さな減衰量のところで誤差が0.0034(−49dB)、大きな減衰量のところで誤差が0.000013(−97dB)とよい振幅特性が得られていることが分かる。この結果、本実施の形態に係るフィルタは、連続的に複数の阻止域を変化することが可能であることが分かる。
【0165】
比較のために、0.2πから0.3πまでを重み「1」、0.3πから0.9πまでを重み「10」、0.9πからπまでを重み「1」とし、かつ、大きな阻止域減衰量が少なくとも−90dB以上となる阻止域が変化しない固定係数を有するFIRフィルタを設計した。そのときの振幅特性を図16に示す。このフィルタは80次であり、阻止域が可変なフィルタの60次より多くの次数が必要となるため、阻止域が可変なフィルタよりも遅延量が大きい。従って、本実施の形態に係るフィルタのように複数の阻止域が部分的に可変なフィルタを設計することも、上述の前提技術と同様にフィルタ次数の低減効果があり、高速かつ高精度の計測に有効である。
【0166】
なお、以上の説明では、複数の阻止域が可変なフィルタの設計について述べたが、一つの阻止域が可変なフィルタの設計にも適用可能である。また、ローパスフィルタの設計について述べたが、ローパスフィルタ以外のフィルタ(バンドパスフィルタやハイパスフィルタ等)の設計にも適用可能である。さらに、FIR型フィルタの設計について述べたが、IIR型フィルタの設計にも適用可能である。
【図面の簡単な説明】
【0167】
【図1】本発明の前提技術に係る重量測定装置の構成を示すブロック図である。
【図2】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図3】本発明の前提技術に係る重量測定装置での重量測定動作を示すフローチャートである。
【図4】最適フィルタの振幅特性を示す図である。
【図5】最適フィルタの振幅特性を示す図である。
【図6】最適フィルタの振幅特性を示す図である。
【図7】最適フィルタの振幅特性を示す図である。
【図8】最適フィルタの振幅特性を示す図である。
【図9】係数gi,jの値を示す図である。
【図10】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図11】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図12】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図13】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図14】最適フィルタ及び本発明の前提技術に係る信号処理部のフィルタでの最大誤差を示す図である。
【図15】本発明の実施の形態におけるスペクトルパラメータの規定方法を示す図である。
【図16】固定係数のFIRフィルタを設計したときの振幅特性を示す図である。
【図17】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図18】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図19】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図20】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図21】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図22】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図23】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図24】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図25】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図26】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【符号の説明】
【0168】
5 信号処理部
6 フィルタ係数演算部
7 データ入力部
9 減衰帯域
【技術分野】
【0001】
本発明は、ディジタルフィルタによるフィルタリング技術に関する。
【背景技術】
【0002】
物品重量を測定する重量測定装置では、歪みゲージ式のロードセルやフォースバランスなどの重量センサーが使用される。この重量センサーは、物品重量と風袋重量との和の重量の影響を受ける固有振動数をもつ。この固有振動数を含む帯域の外部振動が計量系に作用したとき、その外部振動はその固有振動数付近で増幅され、振動ノイズとなって、重量センサーから出力される計量信号中に出現する。以後、この振動ノイズを、「固有振動ノイズ」と呼ぶ。
【0003】
また、搬送系の荷重測定を行う場合には、例えば、ベルトコンベヤーを駆動するモーターや搬送ローラなどの回転系振動に起因するノイズや、商用電源などに起因する電気的なノイズなどが、振動ノイズとして計量信号に重畳されている。
【0004】
近年の重量測定装置では、計量信号に含まれる上記振動ノイズの除去のために、経年変化や周辺環境などの影響を受け難く、フィルタ特性を比較的容易に変更できるディジタルフィルタが採用されており、その中でも、特に安定性に優れた有限インパルス応答(FIR)型のフィルタ(FIRフィルタ)が好まれて使用される。
【0005】
上述のように、重量センサーの固有振動数は物品重量及び風袋重量の影響を受けるため、物品重量あるいは風袋重量が変化した場合には、固有振動ノイズの周波数も変化する。以前では、コンベヤー等の風袋重量が支配的であったため、物品重量の変化による固有振動ノイズの周波数変化を無視することができたが、近年、軽い物品を高精度に重量測定したいという要請から、風袋重量が軽くなり、かかる周波数変化を無視することができなくなってきた。また、モーターや搬送ローラなどに起因する振動ノイズの周波数は、搬送系の仕様、例えば搬送速度などによって変化する。そのため、被計量物の種類や大きさなど、または搬送系の仕様変更によって振動ノイズの周波数が変化した場合であっても、かかる振動ノイズを確実に除去することが可能なディジタルフィルタが望まれる。
【0006】
そこで従来では、多段の移動平均フィルタで構成されたディジタルフィルタを採用して、計量信号中の振動ノイズを確実に除去する技術が下記特許文献1に提案されている。
【0007】
特許文献1で開示されている技術は、各移動平均フィルタの移動平均数を互いに異ならせることによって、振動ノイズが変化するであろう周波数範囲内に複数のノッチを設けて、振動ノイズを確実に除去する手法である。
【0008】
なお、FIRフィルタの設計方法として、逐次射影法を用いる技術が下記の非特許文献1に記載されている。
【0009】
【特許文献1】特公平6−21814号公報
【非特許文献1】相川直幸、外2名,「データ伝送のためのFIR送信・受信フィルタの設計」,電子情報通信学会論文誌,1996年3月,Vol.J79-A No.3,p.608−615
【発明の開示】
【発明が解決しようとする課題】
【0010】
上記特許文献1の手法では、ディジタルフィルタの設計段階で、振動ノイズが変化するであろう周波数範囲を想定し、かかる周波数範囲に応じて移動平均フィルタの段数を決定している。そのため、ディジタルフィルタ設計後の仕様の追加などによって、振動ノイズが、予め想定していた周波数範囲からずれるような場合には、ディジタルフィルタを最初から設計し直す必要があった。
【0011】
また、重量測定装置での仕様の追加などを予め考慮してディジタルフィルタを設計する場合には、多くの段数の移動平均フィルタを事前に用意する必要があり、ディジタルフィルタの回路規模が増大する。
【0012】
また、特許文献1とは異なる手法として、異なる減衰特性を示すフィルタ係数を予め複数記憶しておき、仕様変更などにより振動ノイズの周波数が変化するたびに、かかる周波数に対応したフィルタ係数を呼び出して使用する手法が提案されている。しかし、このような場合であっても、広い周波数範囲の振動ノイズを確実に除去するためには、多くのフィルタ係数を事前に記憶しておく必要があり、フィルタ係数を記憶するメモリの回路規模が増大する。
【0013】
そこで本発明は、上述の問題に鑑みて成されたものであって、ノイズ周波数が変化しやすい場合であっても、フィルタリングに必要な回路の規模を増大させることなく、簡単にかつ適切にノイズ除去できるフィルタリング技術を提供することを目的とする。
【課題を解決するための手段】
【0014】
第1の発明に係るノイズ除去装置は、ディジタル信号のフィルタリングを、可変のフィルタ係数を用いて実行する信号処理部と、所定の演算式を用いて前記フィルタ係数を求めて前記信号処理部に出力するフィルタ係数演算部とを備え、前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、前記フィルタ係数演算部が、入力される前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更することによって、前記複数の減衰帯域の各々の帯域位置を、前記パラメータで指定される所望の帯域位置へと独立に変更可能であることを特徴とする。
【0015】
第2の発明に係るノイズ除去装置は、第1の発明に係るノイズ除去装置において特に、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【0016】
第3の発明に係るノイズ除去装置は、第1又は第2の発明に係るノイズ除去装置において特に、前記パラメータに関して、前記ノイズ除去装置の外部からの値の入力を受け付けるデータ入力部を更に備え、前記データ入力部は、受け付けた前記パラメータの値を前記フィルタ係数演算部に出力することを特徴とする。
【0017】
第4の発明に係るノイズ除去装置は、第1〜第3のいずれか一つの発明に係るノイズ除去装置において特に、前記信号処理部は、前記フィルタリングを、有限インパルス応答(FIR)型のディジタルフィルタで実行することを特徴とする。
【0018】
第5の発明に係る重量測定装置は、第1〜第4のいずれか一つの発明に係るノイズ除去装置と、被計量物の重量を検出する計量部とを備え、前記ノイズ除去装置は、前記計量部による計量結果として得られたディジタル信号を対象としてフィルタリングを実行することを特徴とする。
【0019】
第6の発明に係るノイズ除去方法は、(a)所定の演算式を用いてフィルタ係数を求める工程と、(b)ディジタル信号のフィルタリングを、前記工程(a)で求められた前記フィルタ係数を用いて実行する工程とを備え、前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、前記工程(a)は、(a−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、前記工程(a−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする。
【0020】
第7の発明に係るノイズ除去方法は、第6の発明に係るノイズ除去方法において特に、前記工程(a−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【0021】
第8の発明に係るノイズ除去方法は、第6又は第7の発明に係るノイズ除去方法において特に、(c)前記パラメータの値の入力を受け付ける工程を更に備え、前記工程(a−1)において、前記工程(c)で受け付けられた前記パラメータの値を前記演算式に代入することを特徴とする。
【0022】
第9の発明に係るディジタルフィルタの設計方法は、振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置が可変のディジタルフィルタの設計方法であって、(a)前記ディジタルフィルタの理想振幅特性から、基準フィルタ係数の複数の系列を求める工程と、(b)前記基準フィルタ係数の複数の系列に基づいて、前記ディジタルフィルタのフィルタ係数を、前記減衰帯域の帯域位置を指定するパラメータを含む所定の演算式で近似する工程と、(c)前記演算式を用いて前記フィルタ係数を求める工程とを備え、前記工程(c)は、(c−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、前記工程(c−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする。
【0023】
第10の発明に係るディジタルフィルタの設計方法は、第9の発明に係るディジタルフィルタの設計方法において特に、前記工程(c−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられることを特徴とする。
【発明の効果】
【0024】
第1及び第6の発明によれば、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータを用いてフィルタ係数を変更できるようになっているため、減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、変化しやすい計量信号のノイズ周波数を、簡単にかつ適切にフィルタリングできる。更に、フィルタ係数は演算式で表現されているため、多段のフィルタを準備したり、異なる特性を示すフィルタ係数を予め記憶しておく必要がない。従って、フィルタリングに必要な回路の規模を低減することができ、ローコストの重量測定装置をユーザーに提供できる。また、複数の減衰帯域を指定できるため、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合にも、適切に対応可能である。
【0025】
第2、第7、及び第10の発明によれば、フィルタ設計時に複数のパラメータを同じように近似することができ、結果として所望のフィルタ設計を実現できる。
【0026】
第3及び第8の発明によれば、ユーザーが阻止域の減衰帯域を簡単に変更することができる。
【0027】
第4の発明によれば、FIR型のディジタルフィルタを用いることで動作安定性に優れたフィルタリングを実行できる。
【0028】
第5の発明によれば、適切にノイズをフィルタリング可能な重量測定装置を得ることができる。
【0029】
第9の発明によれば、減衰帯域の帯域位置という物理的に把握しやすいパラメータを用いてフィルタ係数を変更するため、減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、ノイズ周波数が変化しやすい場合であっても、本発明の設計方法を採用することによって、簡単にかつ適切にノイズ除去できる。更に、フィルタ係数は演算式で表現されているため、フィルタを多段で構成する必要がない。従って、ディジタルフィルタの回路規模を低減することができる。また、複数の減衰帯域を指定できるため、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合にも、適切に対応可能である。
【発明を実施するための最良の形態】
【0030】
<本発明の前提技術の説明>
本発明の実施の形態を説明する前に、まず、本発明の前提技術となる重量測定装置について説明する。なお、本前提技術は、本願出願人による特開2004−150883号公報に開示されている。
【0031】
図1は、本前提技術に係る重量測定装置の構成を示すブロック図である。図1に示すように、本前提技術に係る重量測定装置は、歪みゲージ式のロードセルやフォースバランスなどの重量センサー1と、アンプ2と、アナログフィルタ3と、A/D変換器(以後「ADC」と呼ぶ)4と、信号処理部5と、フィルタ係数演算部6と、データ入力部7と、係数記憶部8とを備えている。
【0032】
重量センサー1は、計量系から受けた被計量物の重量を検出して、その結果を測定信号msとしてアンプ2に出力する。アンプ2は、入力された測定信号msを増幅して増幅信号MSとしてアナログフィルタ3に出力する。アナログフィルタ3は、その増幅信号MSから不要な高域成分を除去してアナログ信号Asとして出力する。ADC4は、アナログフィルタ3から出力されるアナログ信号Asに対して所定のサンプリング周期でサンプリングし、所定の量子化ビット数で量子化したテジタル信号を計量信号Dsとして信号処理部5に出力する。
【0033】
信号処理部5は、FIRフィルタを用いて、入力された計量信号Dsをフィルタリングし、その結果を信号Xsとして図示しないマイクロコンピュータに出力する。そして、マイクロコンピュータが信号Xsに基づいて被計量物の重量を計算し、図示しない表示部に表示する。なお、一般に2N次のFIRフィルタの周波数応答H(ejω)は以下の式(1)で示される。
【0034】
【数1】
【0035】
ただし、ai(i=0,1,2,・・・,N)はフィルタ係数である。また、ωは正規化角周波数であって、フィルタリング時のデータのサンプリング周波数で正規化した角周波数である。本前提技術で言えば、信号処理部5でのフィルタリング時のデータのサンプリング周波数で正規化した角周波数である。以後「正規化角周波数」と言えば、このようにサンプリング周波数で正規化した角周波数を意味するものとする。
【0036】
図2は、信号処理部5でのフィルタリングの振幅特性の一例を示す図である。図2に示されるように、信号処理部5で用いられるFIRフィルタはローパスフィルタであって、その振幅特性の阻止域において、部分的に減衰量が大きい減衰帯域9が存在する。そして、本前提技術に係る重量測定装置は、この減衰帯域9の帯域位置を変更できる機能を備えている。つまり、減衰帯域9の位置を周波数の高い方へ移動させたり、低い方へ移動させたりできる機能を備えている。なお、以後単に「減衰帯域」と言えば、図2に示される減衰帯域9のように、阻止域において部分的に減衰量を大きくすべき減衰帯域を意味するものとする。
【0037】
フィルタ係数演算部6は、上記式(1)中のフィルタ係数aiの系列{ai}を以下の演算式(2)を用いて求めて、信号処理部5へ出力する。
【0038】
【数2】
【0039】
ただし、gi,j(j=0,1,2,・・・,M)は係数である。またxは、減衰帯域の帯域位置を指定するパラメータであって、代入される値は、減衰帯域の帯域位置に対応している。式(2)に示されるように、フィルタ係数aiはパラメータxについての多項式で表現されている。ここで、式(2)を式(1)に代入すると、周波数応答H(ejω)は以下の式で表される。
【0040】
【数3】
【0041】
係数記憶部8は、例えばROM(Read-Only Memory)であって、係数gi,jの値を予め記憶している。そして、この係数gi,jの値はフィルタ係数演算部6によって係数記憶部8から読み出される。
【0042】
データ入力部7は、例えばキーボードであって、ユーザーによる重量測定装置の外部からのパラメータxの値の入力を受け付ける。そして、受け付けたパラメータxの値をフィルタ係数演算部6に出力する。
【0043】
次に、本前提技術に係る重量測定装置における被計量物の重量測定動作について図3を参照して説明する。
【0044】
図3に示されるように、ステップs1において重量測定装置に電源が投入されると、ステップs2において、フィルタ係数演算部6は係数記憶部8から係数gi,jの値を読み出す。そしてフィルタ係数演算部6は、予め内部に記憶しているパラメータxの初期値を読み出す。
【0045】
次にステップs3において、フィルタ係数演算部6は、係数gi,j及びパラメータxの値を式(2)に代入してフィルタ係数の1つの系列{ai}を求め、信号処理部5へ出力する。これにより、信号処理部5でのフィルタ特性における減衰帯域の帯域位置が、パラメータxで指定される初期位置に設定される。なおこのとき、フィルタ係数aiの演算式(2)は多項式で表現されているため、迅速にフィルタ係数aiを求めることができる。
【0046】
次にステップs4において、信号処理部5はステップs3で求められたフィルタ係数の系列{ai}を用いて、計量信号Dsに対してフィルタリングを実行する。そして、その結果を信号Xsとしてマイクロコンピュータに出力し、当該マイクロコンピュータが被計量物の重量をCRTなどの表示部に表示する。
【0047】
次にステップs5において、データ入力部7は、重量測定装置のユーザーによってパラメータxの値が入力されると、その値をフィルタ係数演算部6に出力する。
【0048】
上述のように、被計量物の種類の変更などによって重量センサー1の固有振動数が変化し、計量信号Dsに含まれる固有振動ノイズの周波数が変化するため、かかる固有振動ノイズを確実に除去するために、ユーザーは、変化後の固有振動数を含む帯域位置を示すパラメータxの値を入力する。例えば、被計量物の種類ごとに重量センサー1の固有振動数の情報を予め準備しておき、被計量物の種類を変更する際に、ユーザーはこの情報を参照して、パラメータxの値をデータ入力部7に入力する。
【0049】
なおここでは、パラメータxの値をデータ入力するように構成しているが、例えば重量チェッカーのような計量装置ではコンベア速度が決まれば減衰させたい周波数が決定するので、自動的にパラメータxを設定するように構成してもよい。また、測定信号の振動波形のFFT等によって周波数解析を行い、最も振幅の大きいところを検出して自動的にパラメータxを設定するという構成にしてもよい。
【0050】
次にステップs6において、フィルタ係数演算部6は、受け取ったパラメータxの値を式(2)に代入してフィルタ係数の系列{ai}を変更し、信号処理部5へ出力する。これにより、信号処理部5でのフィルタ特性における減衰帯域の帯域位置が、パラメータxで指定される帯域位置へと変更される。そして、ステップs7において、信号処理部5はステップs6で変更されたフィルタ係数の系列{ai}を用いてフィルタリングを実行し、その結果を信号Xsとして出力する。
【0051】
ユーザーは、減衰帯域の帯域位置を再度変更する必要がある場合には、データ入力部7にパラメータxの新たな値を入力する。そして、ステップs6,s7が実行されて、減衰帯域の帯域位置はパラメータxで指定される帯域位置に変更される。
【0052】
このように、本前提技術に係る重量測定装置では、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータxを用いてフィルタ係数aiを変更できるようになっている。そのため、重量センサー1の固有振動数の変化等によって、信号処理部5での減衰すべき周波数が変わった際にも、新たな減衰対象周波数の情報を参照して簡単に減衰帯域を変更することが可能となる。従って、変化しやすい計量信号Dsのノイズ周波数を、簡単にかつ適切にフィルタリングできる。
【0053】
更に、式(2)に示されるように、フィルタ係数aiは所定の演算式で表現されているため、特許文献1に記載の従来技術のように多段のフィルタを準備したり、異なる特性を示すフィルタ係数を予め記憶しておく必要がない。従って、フィルタリングに必要な回路の規模を低減することができ、ローコストの重量測定装置をユーザーに提供できる。
【0054】
次に、係数gi,jの値の決定方法について説明する。まず、減衰帯域の帯域位置が可変のFIRフィルタについて、以下の理想振幅特性M(ejω,ψ)と重み関数W(ejω,ψ)とを考える。
【0055】
【数4】
【0056】
ただし、ωpは通過域正規化角周波数、ωsは阻止域端正規化角周波数、wは減衰帯域の帯域幅、ψは減衰帯域の帯域位置をコントロールするパラメータであって、ωs<ψ<π−wである。
【0057】
本前提技術では、上述の式(4)にも示されるように、理想振幅特性における減衰帯域は、角周波数ψ〜(ψ+w)までの周波数範囲にわたって存在し、パラメータψの値によって、その帯域位置が特定される。ここで、理想振幅特性における減衰帯域の帯域位置を「基準帯域位置」と呼ぶ。
【0058】
次に、パラメータψに代入される値ψk(k=0,1,2,・・・,K)のそれぞれについて最適フィルタを設計する。なお値ψkは、kの値が大きいほど大きい値を示す。本前提技術では、逐次射影法を用いて最適フィルタを設計する。以下に具体的に説明する。
【0059】
各値ψkにおけるフィルタ係数aiをai,kとすると、各値ψkにおけるディジタルフィルタの周波数応答H(ejω,ψk)は以下の式(6)で示される。
【0060】
【数5】
【0061】
そして、フィルタ係数ai,kを逐次射影法で求めるために、n回目の繰り返し誤差e(ω)を以下の式(7)で表す。
【0062】
【数6】
【0063】
ただし、M(ω)は理想振幅特性M(ejω,ψ)である。なお、フィルタ係数ai,kの右肩のnは単に繰り返し数を示すものであり、指数を示すものではない。
【0064】
ここで、最も仕様を満たさない点をωM、理想振幅特性からの許容誤差をλ(ω)とすると、以下の式が成立する。
【0065】
【数7】
【0066】
重み関数W(ejω,ψ)=1のときの許容誤差をδとして、λ(ω)を以下の式(9)で表す。
【0067】
【数8】
【0068】
ただし、W(ω)は重み関数W(ejω,ψ)である。
【0069】
式(9)及び上述の式(5)に示されるように、最適フィルタを設計する際に採用される、理想振幅特性の減衰帯域における許容誤差は、重み関数によって、他の帯域における許容誤差の1/10倍に設定される。
【0070】
そして、逐次射影法における係数更新に、以下の式(10)を使用する。
【0071】
【数9】
【0072】
ただし、eMはe(ωM)である。
【0073】
この式(10)を用いて、収束するまで、すなわちeM≦λ(ωM)となるまでフィルタ係数の更新を繰り返して、最適なフィルタ係数ai,kを求める。
【0074】
このようにして、パラメータψに値ψ0,ψ1,・・・,ψKを代入した際の理想振幅特性と重み関数とから、フィルタ係数ai,kのK個の系列{ai,0},{ai,1},・・・,{ai,K}をそれぞれ求める。ここで、理想振幅特性と重み関数とから求められた最適なフィルタ係数ai,kを、基準フィルタ係数ai,k’(k=0,1,2,・・・,K)とする。
【0075】
次に、式(2)中のM次多項式bi(x)で、基準フィルタ係数ai,k’を最小二乗的に近似を行って、係数gi,jの値を決定する。
【0076】
そこで、まずパラメータxに値ψkを代入したときのb0(ψk)と、基準フィルタ係数a0,k’について考えると、
【0077】
【数10】
【0078】
が最小となるベクトルB0=[g0,0 g0,1 ・・・ g0,M]Tを求めることが統計学的に好ましい性質を持つことが知られている。具体的な計算方法としては、以下の式(12)で与えられる極大極小の条件を連立方程式として、g0,0,g0,1,・・・,g0,Mについて解く。
【0079】
【数11】
【0080】
そして、式(12)を正規方程式で表現すると以下のようになる。
【0081】
【数12】
【0082】
式(12)の行列Xは値ψkから求まり、ベクトルA0,kは逐次射影法で求めた基準フィルタ係数ai,k’から求まるため、左辺の(XTX)及び右辺の(XTA0,k)を求めることができる。従って、ベクトルB0を求めることができる。
【0083】
同様の手順で、b1(ψk)と基準フィルタ係数a1,k’,b2(ψk)と基準フィルタ係数a2,k’,・・・,bN(ψk)と基準フィルタ係数aN,k’について考えて、ベクトルBi=[gi,0 gi,1 ・・・ gi,M]Tを求める。
【0084】
本前提技術では、このようにして求められた値を、式(2)中の係数gi,jの値として採用することによって、パラメータxによる減衰帯域の帯域位置の指定が可能となる。
【0085】
また本前提技術では、理想振幅特性を式(4)のように定義した場合、ユーザーが入力することができるパラメータxの値の範囲は、ψ0≦x≦ψKとする。例えば、ユーザーがデータ入力部7に対して、パラメータxの値として値ψ0を入力すると、減衰帯域について、周波数ψ0〜(ψ0+w)までで規定される帯域位置が指定される。また、ユーザーが値ψKを入力すると、周波数ψK〜(ψK+w)までで規定される帯域位置が指定される。
【0086】
このように、パラメータxによって、ψ=ψ0における理想振幅特性の基準帯域位置から、ψ=ψKにおける理想振幅特性の基準帯域位置までの周波数範囲内で、ユーザーは減衰帯域の帯域位置を指定することができる。そして、パラメータxの値と、減衰帯域の帯域位置との対応表を予め準備することによって、ユーザーは簡単に希望の帯域位置を指定することができる。
【0087】
なお上述のように、重み関数W(ejω,ψ)は、最適フィルタを設計する際に使用される許容誤差の各周波数領域における重みを決定しているため、信号処理部5でのフィルタ特性における減衰帯域の減衰量は、この重み関数W(ejω,ψ)のψ≦|ω|≦ψ+wの値によって指定される。本前提技術では、式(5)に示されるように、信号処理部5での減衰帯域の減衰量は、阻止域の他の帯域での減衰量の10倍に設定されている。
【0088】
次に、係数gi,jに具体的数値を代入して、パラメータxの値によって減衰帯域の帯域位置が周波数軸上を具体的にどのように変化するかについて説明する。
【0089】
そこで、一例として以下の条件を考える。
【0090】
【数13】
【0091】
また、0.3π≦ψ≦0.4πを考え、その間を11等分に離散化した値を値ψk(k=0,1,・・・,10)とする。つまり、ψ0=0.3π,ψ1=0.31π,ψ2=0.32π,・・・,ψ10=0.4πとする。従って、パラメータxに代入可能な値の範囲は、0.3π≦x≦0.4πとなる。
【0092】
図4〜8は、上述の条件で求められた基準フィルタ係数ai,k’をもつ最適フィルタの振幅特性を示す図であって、それぞれψ=ψ0,ψ2,ψ5,ψ8,ψ10のときの振幅特性を示している。なお図中の実線10は、各図の振幅特性が対応する理想振幅特性の基準帯域位置(周波数ψ〜ψ+w)を示している。
【0093】
図4〜8を参照すると、最適フィルタにおける減衰帯域9の帯域位置がパラメータψの値によって変化すること、また、減衰帯域9以外の阻止域では等リップル特性になっていることが理解できる。
【0094】
次に、上述の条件で求められた基準フィルタ係数ai,k’を、M=5、すなわち5次の多項式で近似し、係数gi,jの値を決定する。図9はこのときの係数gi,jの値を示している。
【0095】
図10〜13は、式(2)の係数gi,jに図9に示す値を採用した際に信号処理部5で実行されるフィルタリングの振幅特性を示す図である。図10は、パラメータxに値ψ0,ψ1,・・・,ψ10を代入したときの特性を示しており、図11〜13は、それぞれパラメータxに0.305π,0.355π,0.395πを代入したときの特性を示している。なお図中の実線10は、図4〜8と同様に、各図の振幅特性が対応する理想振幅特性の基準帯域位置(周波数ψ〜ψ+w)を示している。
【0096】
図11に示されるように、パラメータxに0.305πが代入されると、ほぼ周波数0.305π〜0.405πまでの周波数範囲(実線10の示す範囲)の減衰量が大きくなる。また、図12,13に示されるように、パラメータxに0.355πが代入されると、ほぼ周波数0.355π〜0.455πまでの周波数範囲の減衰量が大きくなり、パラメータxに0.395πが代入されると、ほぼ周波数0.395π〜0.495πまでの周波数範囲の減衰量が大きくなる。
【0097】
このように、図11〜13を参照すると、パラメータxによって指定される帯域位置で、部分的に減衰量が大きくなっていることが理解できる。また、図10〜13を参照すると、減衰帯域9での減衰量が、阻止域における他の帯域の減衰量の約10倍(20dB)であることが理解できる。
【0098】
図14は、上述の条件で求められた基準フィルタ係数ai,k’をもつ最適フィルタの振幅特性における最大誤差と、図9に示す係数gi,jを有するM次多項式bi(x)で近似されたフィルタ係数aiをもつフィルタ、つまり信号処理部5でのフィルタの振幅特性における最大誤差とを示す図である。なお、図中の周波数範囲AR1〜AR4は、それぞれ0≦|ω|≦ωp,ωs≦|ω|≦ψk,ψk≦|ω|≦ψk+w,ψk+w≦|ω|≦πを示している。
【0099】
図14に示されるように、基準フィルタ係数の系列{ai,k’}に基づく5次の多項式でフィルタ係数を近似すると、最適フィルタと信号処理部5でのフィルタとの最大誤差はほぼ同様の値を示す。
【0100】
以上のように、本前提技術に係る重量測定装置では、減衰帯域の帯域位置という物理的意味が把握しやすいパラメータxを用いてフィルタ係数aiを変更できるようになっているため、簡単に減衰帯域の帯域位置を変更することができ、変化しやすい計量信号のノイズ周波数を、簡単にかつ適切にフィルタリングできる。
【0101】
なお、係数gi,jを求める際のパラメータψに代入する値ψk(k=0,1,・・・,K)の個数は3つ以上、つまりK≧3の方が望ましい。理由は以下の通りである。
【0102】
本発明では、周波数軸上に幅を有する減衰帯域をパラメ−タxによって移動させるため、パラメータxによって帯域位置として指定可能な周波数範囲(以後、単に「指定周波数範囲」と呼ぶ)の両端だけでなく、その中間部分でも、減衰帯域の帯域幅を所望の帯域幅(式(4)中の帯域幅w)に近づけることが望まれる。
【0103】
そこで、値ψkの個数を3つ以上に設定すると、指定周波数範囲の両端での理想振幅特性、つまりψ=ψ0のときの理想振幅特性及びψ=ψKのときの理想振幅特性だけでなく、中間的な帯域位置での理想振幅特性にも基づいて基準フィルタ係数の系列{ai,k’}を求めることになり、求めた系列{ai,k’}を用いて式(2)の係数gi,jの値を決定することになる。言い換えれば、値ψkの個数を3つ以上に設定すると、指定周波数範囲の両端での理想振幅特性だけでなく、中間的な帯域位置での理想振幅特性に関する情報も利用してフィルタ係数の演算式(2)を導出することになる。そのため、指定周波数範囲の中間部分あたりでも、減衰帯域の帯域幅が理想特性である帯域幅wから大きく外れることがなくなる。
【0104】
また本前提技術では、重量測定装置に関する発明として説明したが、一般的なディジタルフィルタの設計方法に関する発明として上述の内容を捉えることができる。すなわち、減衰帯域の帯域位置が可変のディジタルフィルタを以下の方法で設計する。
【0105】
まず、上述のように理想振幅特性から基準フィルタ係数ai,k’の複数の系列{ai,k’}を求める。そして、求めた系列{ai,k’}を用いて係数gi,jを決定し、ディジタルフィルタのフィルタ係数aiを上述の式(2)で近似する。そして、式(2)のパラメータxに値を代入して、ディジタルフィルタのフィルタ係数aiの系列{ai}を求める。
【0106】
フィルタ特性における減衰帯域の帯域位置を変更したい場合には、パラメータxの値を変更することによってフィルタ係数を変更する。これによって、減衰帯域の帯域位置がパラメータxで指定される帯域位置へと変更される。
【0107】
このようなディジタルフィルタの設計方法を採用することによって、簡単に減衰帯域を変更することが可能になる。従って、ノイズ周波数が変化しやすい場合であっても、簡単にかつ適切にノイズ除去できる。更に、フィルタ係数は演算式で表現されているため、特許文献1の従来技術のようにフィルタを多段で構成する必要がない。従って、ディジタルフィルタの回路規模を低減することができる。
【0108】
<本発明の前提技術の問題点>
上述した前提技術では、例えば式(5)で示されるように、阻止域内で一つの減衰帯域のみが可変である場合が前提とされていた。しかしながら、大きなノイズが発生する原因が複数あり、かつ、それらが変化する場合も想定され得る。そこで、以下では、前提技術の手法を用いて、複数の減衰帯域を可変に設定可能なフィルタを設計する場合について説明する。
【0109】
この場合、式(4)との対応において、理想振幅特性は下記の式(21)となる。
【0110】
【数14】
【0111】
また、式(5)との対応において、重み関数は下記の式(22)となる。
【0112】
【数15】
【0113】
ここで、ψ1,ψ2は、各減衰帯域の帯域位置をコントロールするスペクトルパラメータであり、各減衰帯域の正規化角周波数の下限値として与えられる。
【0114】
ψ1,ψ2におけるフィルタ係数をai,j,kとすると、
【0115】
【数16】
【0116】
となる。従って、複数の帯域可変フィルタの伝達関数は、
【0117】
【数17】
【0118】
となる。
【0119】
ここで、前提技術では、複数の減衰帯域そのものの周波数パラメータが設計時に用いられるため、例えば、ψ1=0.3、ψ2=0.8、j=4、k=4の場合を考えると、式(24)において、ψ14=0.34=0.0081、ψ24=0.84=0.4096となる。このように、ψ14はψ24に比べて非常に小さな値となるため、フィルタ設計時にψ1とψ2を同じように近似できず、結果として、ψ1側の帯域において所望の減衰が得られないこととなる。
【0120】
そこで、以下に述べるように本発明の実施の形態では、設計時にψ1とψ2を同じように近似でき、複数の減衰帯域の各々において所望の減衰を得ることが可能なフィルタ設計を実現する。
【0121】
<本発明の実施の形態の説明>
図15に示すように、K個の阻止帯域(減衰帯域)が可変な所望の周波数特性を、
【0122】
【数18】
【0123】
とする。ここで、ωpは通過域端正規化角周波数、ωsは阻止域端正規化角周波数、φ1,φ2,・・・,φKは、大きな阻止域減衰量を必要とする各帯域の中心正規化角周波数、τ1,τ2,・・・,τKは、大きな阻止域減衰量を必要とする各帯域の帯域幅を表す。また、δ1,δ2,・・・,δKは、スペクトルパラメータであり、
【0124】
【数19】
【0125】
で与えられる。また、重み関数を、
【0126】
【数20】
【0127】
とする。ここで、g1,g2,・・・,gKは、大きな阻止域減衰量を必要とする各帯域の重みで、正の実数値である。このように本発明の実施の形態では、スペクトルパラメータによる個々の帯域指定を、上述の前提技術のような周波数の下限値ではなく、その中心周波数からのずれ量(各々の減衰帯域の変化すべき範囲の中心周波数からの変位量)として与えることが特徴である。スペクトルパラメータを中心周波数からのずれ量として与えること以外は、上述の前提技術と基本的に同様であるため、装置構成等の詳細な説明は省略する。
【0128】
上述の所望特性と重みとを有する特性を近似する2N次の複数の阻止域可変直線位相FIRディジタルフィルタの伝達関数の周波数応答は、スペクトルパラメータを用いて、
【0129】
【数21】
【0130】
と表す。ここで、スペクトルパラメータが変化すると、h(i,δ1,δ2,・・・,δK)の値が変化するので、上述の前提技術を拡張して、各スペクトルパラメータに対してそれぞれLi次の多項式を用いて係数を近似することを考える。
【0131】
【数22】
【0132】
例えば、φ1=0.3、φ2=0.8、δ1=0.2,δ2=0.2、l1=4,l2=4とすると、式(29)においてはφ1,φ2ではなくδ1,δ2がパラメータとして与えられているため、δ14=0.0016、δ24=0.0016となり、両者は同じ値となる。従って、フィルタ設計時にはδ1,δ2を同じように近似することができ、結果として所望のフィルタ設計が実現できるようになった。
【0133】
以降では、説明の簡単化のため、K=2の場合の例について述べる。
【0134】
今、式(29)を式(28)に代入した伝達関数の振幅特性|H(ω,φ1,φ2,δ1,δ2)が、式(25)の理想振幅特性と式(27)の重み関数との間で、重み付き最小自乗の意味で最適となる評価関数を、
【0135】
【数23】
【0136】
と与える。ここで、最適な係数g(i,l1,l2)は、式(30)の評価関数が最小となるように求めることである。式(30)の評価関数において、各スペクトルパラメータの変化量をMδ+1個に等分割し、0からπまでの周波数領域をMf+1個に分割すると、以下のような離散化した評価関数が得られる。
【0137】
【数24】
【0138】
離散化した式(31)の評価関数を最小化するため、係数g(p,q,r)に関する偏微分を求め、零とすると、
【0139】
【数25】
【0140】
となる。但し、
【0141】
【数26】
【0142】
である。式(32)及び式(33)を整理すると、
【0143】
【数27】
【0144】
となる。そこで、式(34)において、p=0,1,・・・,N、q=0,1,・・・,L1、r=0,1,・・・,L2を代入し、スペクトルパラメータに関する多次元配列を1次元配列に変換すると、以下の行列が得られる。
【0145】
【数28】
【0146】
但し、
【0147】
【数29】
【0148】
となる。ここで、u=(Mf+1)(Mδ+1)(Mδ+1)、v=(N+1)(L1+1)(L2+1)である。diag[・]は[・]内を要素とする対角行列である。また、行列Aのi,j番目の要素a(i,j)は、
【0149】
【数30】
【0150】
となる。但し
【0151】
【数31】
【0152】
であり、jは以下のように、0から(N+1)(L1+1)(L2+1)まで連続的に変化し、それに対応するl1,j,l2,jは以下のように変化する。
【0153】
【数32】
【0154】
ここで、
【0155】
【数33】
【0156】
はcを超えない最も大きな整数値であり、mod(a,b)はaをbで割ったときの余りを意味する。
【0157】
以上より、最適な係数は、
【0158】
【数34】
【0159】
となる。
【0160】
以下では、具体的な設計例として、大きな減衰量をもつ阻止域が2つ可変可能な以下の仕様を考える。
【0161】
【表1】
【0162】
この例において、通過域を20等分、阻止域全体を500等分に離散化した。また、大きな減衰量の角周波数変化量についてもそれぞれ0.05刻みに離散化した。得られた振幅特性を図17〜26に示す。これらの図より、スペクトルパラメータδ1,δ2が変化したとき、振幅特性がそれぞれ変化し、所望の振幅特性に近似していることが分かる。さらに、スペクトルパラメータが変化したときのそれぞれの最大誤差を、下記の表に示す。
【0163】
【表2】
【0164】
また、離散化していない点δ1=0.0,δ2=0.01のときの振幅特性も図26に示す。この図より、離散化していない点でも、小さな減衰量のところで誤差が0.0034(−49dB)、大きな減衰量のところで誤差が0.000013(−97dB)とよい振幅特性が得られていることが分かる。この結果、本実施の形態に係るフィルタは、連続的に複数の阻止域を変化することが可能であることが分かる。
【0165】
比較のために、0.2πから0.3πまでを重み「1」、0.3πから0.9πまでを重み「10」、0.9πからπまでを重み「1」とし、かつ、大きな阻止域減衰量が少なくとも−90dB以上となる阻止域が変化しない固定係数を有するFIRフィルタを設計した。そのときの振幅特性を図16に示す。このフィルタは80次であり、阻止域が可変なフィルタの60次より多くの次数が必要となるため、阻止域が可変なフィルタよりも遅延量が大きい。従って、本実施の形態に係るフィルタのように複数の阻止域が部分的に可変なフィルタを設計することも、上述の前提技術と同様にフィルタ次数の低減効果があり、高速かつ高精度の計測に有効である。
【0166】
なお、以上の説明では、複数の阻止域が可変なフィルタの設計について述べたが、一つの阻止域が可変なフィルタの設計にも適用可能である。また、ローパスフィルタの設計について述べたが、ローパスフィルタ以外のフィルタ(バンドパスフィルタやハイパスフィルタ等)の設計にも適用可能である。さらに、FIR型フィルタの設計について述べたが、IIR型フィルタの設計にも適用可能である。
【図面の簡単な説明】
【0167】
【図1】本発明の前提技術に係る重量測定装置の構成を示すブロック図である。
【図2】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図3】本発明の前提技術に係る重量測定装置での重量測定動作を示すフローチャートである。
【図4】最適フィルタの振幅特性を示す図である。
【図5】最適フィルタの振幅特性を示す図である。
【図6】最適フィルタの振幅特性を示す図である。
【図7】最適フィルタの振幅特性を示す図である。
【図8】最適フィルタの振幅特性を示す図である。
【図9】係数gi,jの値を示す図である。
【図10】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図11】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図12】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図13】本発明の前提技術に係る信号処理部でのフィルタリングの振幅特性を示す図である。
【図14】最適フィルタ及び本発明の前提技術に係る信号処理部のフィルタでの最大誤差を示す図である。
【図15】本発明の実施の形態におけるスペクトルパラメータの規定方法を示す図である。
【図16】固定係数のFIRフィルタを設計したときの振幅特性を示す図である。
【図17】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図18】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図19】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図20】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図21】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図22】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図23】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図24】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図25】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【図26】本発明の実施の形態において、スペクトルパラメータδ1,δ2を変化させたときの振幅特性の変化を示す図である。
【符号の説明】
【0168】
5 信号処理部
6 フィルタ係数演算部
7 データ入力部
9 減衰帯域
【特許請求の範囲】
【請求項1】
ディジタル信号のフィルタリングを、可変のフィルタ係数を用いて実行する信号処理部と、
所定の演算式を用いて前記フィルタ係数を求めて前記信号処理部に出力するフィルタ係数演算部と
を備え、
前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、
前記フィルタ係数演算部が、入力される前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更することによって、前記複数の減衰帯域の各々の帯域位置を、前記パラメータで指定される所望の帯域位置へと独立に変更可能であることを特徴とする、ノイズ除去装置。
【請求項2】
前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項1に記載のノイズ除去装置。
【請求項3】
前記パラメータに関して、前記ノイズ除去装置の外部からの値の入力を受け付けるデータ入力部を更に備え、
前記データ入力部は、受け付けた前記パラメータの値を前記フィルタ係数演算部に出力することを特徴とする、請求項1又は2に記載のノイズ除去装置。
【請求項4】
前記信号処理部は、前記フィルタリングを、有限インパルス応答(FIR)型のディジタルフィルタで実行することを特徴とする、請求項1〜3のいずれか一つに記載のノイズ除去装置。
【請求項5】
請求項1〜4のいずれか一つに記載のノイズ除去装置と、
被計量物の重量を検出する計量部と
を備え、
前記ノイズ除去装置は、前記計量部による計量結果として得られたディジタル信号を対象としてフィルタリングを実行する、重量測定装置。
【請求項6】
(a)所定の演算式を用いてフィルタ係数を求める工程と、
(b)ディジタル信号のフィルタリングを、前記工程(a)で求められた前記フィルタ係数を用いて実行する工程と
を備え、
前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、
前記工程(a)は、
(a−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、
前記工程(a−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする、ノイズ除去方法。
【請求項7】
前記工程(a−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項6に記載のノイズ除去方法。
【請求項8】
(c)前記パラメータの値の入力を受け付ける工程を更に備え、
前記工程(a−1)において、前記工程(c)で受け付けられた前記パラメータの値を前記演算式に代入することを特徴とする、請求項6又は7に記載のノイズ除去方法。
【請求項9】
振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置が可変のディジタルフィルタの設計方法であって、
(a)前記ディジタルフィルタの理想振幅特性から、基準フィルタ係数の複数の系列を求める工程と、
(b)前記基準フィルタ係数の複数の系列に基づいて、前記ディジタルフィルタのフィルタ係数を、前記減衰帯域の帯域位置を指定するパラメータを含む所定の演算式で近似する工程と、
(c)前記演算式を用いて前記フィルタ係数を求める工程と
を備え、
前記工程(c)は、
(c−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、
前記工程(c−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする、ディジタルフィルタの設計方法。
【請求項10】
前記工程(c−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項9に記載のディジタルフィルタの設計方法。
【請求項1】
ディジタル信号のフィルタリングを、可変のフィルタ係数を用いて実行する信号処理部と、
所定の演算式を用いて前記フィルタ係数を求めて前記信号処理部に出力するフィルタ係数演算部と
を備え、
前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、
前記フィルタ係数演算部が、入力される前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更することによって、前記複数の減衰帯域の各々の帯域位置を、前記パラメータで指定される所望の帯域位置へと独立に変更可能であることを特徴とする、ノイズ除去装置。
【請求項2】
前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項1に記載のノイズ除去装置。
【請求項3】
前記パラメータに関して、前記ノイズ除去装置の外部からの値の入力を受け付けるデータ入力部を更に備え、
前記データ入力部は、受け付けた前記パラメータの値を前記フィルタ係数演算部に出力することを特徴とする、請求項1又は2に記載のノイズ除去装置。
【請求項4】
前記信号処理部は、前記フィルタリングを、有限インパルス応答(FIR)型のディジタルフィルタで実行することを特徴とする、請求項1〜3のいずれか一つに記載のノイズ除去装置。
【請求項5】
請求項1〜4のいずれか一つに記載のノイズ除去装置と、
被計量物の重量を検出する計量部と
を備え、
前記ノイズ除去装置は、前記計量部による計量結果として得られたディジタル信号を対象としてフィルタリングを実行する、重量測定装置。
【請求項6】
(a)所定の演算式を用いてフィルタ係数を求める工程と、
(b)ディジタル信号のフィルタリングを、前記工程(a)で求められた前記フィルタ係数を用いて実行する工程と
を備え、
前記演算式は、前記フィルタリングの振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置をそれぞれ指定するパラメータを含み、
前記工程(a)は、
(a−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、
前記工程(a−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする、ノイズ除去方法。
【請求項7】
前記工程(a−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項6に記載のノイズ除去方法。
【請求項8】
(c)前記パラメータの値の入力を受け付ける工程を更に備え、
前記工程(a−1)において、前記工程(c)で受け付けられた前記パラメータの値を前記演算式に代入することを特徴とする、請求項6又は7に記載のノイズ除去方法。
【請求項9】
振幅特性の阻止域において減衰量を部分的に大きくすべき複数の減衰帯域の各々の帯域位置が可変のディジタルフィルタの設計方法であって、
(a)前記ディジタルフィルタの理想振幅特性から、基準フィルタ係数の複数の系列を求める工程と、
(b)前記基準フィルタ係数の複数の系列に基づいて、前記ディジタルフィルタのフィルタ係数を、前記減衰帯域の帯域位置を指定するパラメータを含む所定の演算式で近似する工程と、
(c)前記演算式を用いて前記フィルタ係数を求める工程と
を備え、
前記工程(c)は、
(c−1)前記パラメータの値を前記演算式に代入して前記フィルタ係数を変更する工程を含み、
前記工程(c−1)を実行することによって、前記複数の減衰帯域の各々の帯域位置が、前記パラメータで指定される所望の帯域位置へと独立に変更されることを特徴とする、ディジタルフィルタの設計方法。
【請求項10】
前記工程(c−1)において、前記パラメータは、各々の減衰帯域の変化すべき範囲の中心周波数からの変位量として与えられる、請求項9に記載のディジタルフィルタの設計方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2007−129408(P2007−129408A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−319313(P2005−319313)
【出願日】平成17年11月2日(2005.11.2)
【出願人】(000147833)株式会社イシダ (859)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月2日(2005.11.2)
【出願人】(000147833)株式会社イシダ (859)
[ Back to top ]