
ノズル装置
【課題】より効率的な分取分注作業が可能なノズル装置を提供する。
【解決手段】ノズル装置12には、複数のノズルユニット14a〜14eが隣接配置されている。各ノズルユニット14a〜14eは、本体部であるタワー部と、ノズル16a〜16eをそれぞれ備えている。外側に位置するノズルユニットのノズル16a,16b,16d,16eは、タワー部に対して隣接方向内側にオフセットした状態で取り付けられている。各ノズル16は、Z用モータ52、プーリー対48a,48b、ベルト部材46からなる昇降機構により昇降自在となっている。本体部より幅広であるZ用モータ52は、高さ方向にずれて、より具体的には、正面視で千鳥状に配置されている。
【解決手段】ノズル装置12には、複数のノズルユニット14a〜14eが隣接配置されている。各ノズルユニット14a〜14eは、本体部であるタワー部と、ノズル16a〜16eをそれぞれ備えている。外側に位置するノズルユニットのノズル16a,16b,16d,16eは、タワー部に対して隣接方向内側にオフセットした状態で取り付けられている。各ノズル16は、Z用モータ52、プーリー対48a,48b、ベルト部材46からなる昇降機構により昇降自在となっている。本体部より幅広であるZ用モータ52は、高さ方向にずれて、より具体的には、正面視で千鳥状に配置されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置に関する。
【背景技術】
【0002】
血清及び血液などの検体検査を行う場合、検体の分取分注作業は、検体の分析を行う前処理工程にて行われている。この前処理工程では、検査依頼に従って、親検体(被検者より採血した検体等をいう)を別の容器に必要項目ごとに取り分けて検査項目ごとに子検体(取り分けられた検体をいう)を作成する。これらの作業を自動化する装置は、従来各種のものが提案され、臨床、研究施設、検査センター等にて使用されている。
【0003】
近年、検体検査の時間短縮に対する要望が強くなり、これに伴い、既述の分取分注作業の高速化についても高い要望がある。そこで、従来から、分取分注するノズルを複数備えた多連ノズルのノズル装置が提案されている。例えば、特許文献1には、二つのノズルによって、1回の動作で2つのサンプルを分取分注する分取分注装置が開示されている。この分取分注装置では、ノズルの近傍に設けられたモータにより当該ノズルを上下駆動し、ノズルから離れた位置に設けられたモータの駆動力をワイヤで伝達することで当該ノズルを隣接方向に駆動してノズルピッチを変更している。かかる構成によれば、1回の動作で、2つのサンプルを分取分注できるため、分取分注の作業時間を幅広に短縮できる。
【0004】
【特許文献1】特開平6−347467号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術を、3連以上のノズル装置に適用することは困難である。すなわち、特許文献1では、ワイヤを介してノズルに駆動力を伝達しており、各ノズルごとにワイヤを用意する必要がある。しかし、ノズルが3連以上の場合、3以上のワイヤを重複することなく引き回すことは困難であった。そして、結果として、更なる分取分注効率の向上が困難であった。また、ワイヤによる駆動力伝達を行った場合、当該ワイヤを設置するスペースが必要となり、ノズル装置全体の小型化を阻害していた。
【0006】
そこで、モータからの駆動力をワイヤを介することなく、ノズルに伝達することも考えられる。すなわち、各ノズルの近傍にモータやポンプ等を設け、比較的単純な伝達機構を介してモータの駆動力をノズルに伝達することが考えられる。しかし、この場合、ノズル間距離、いわゆるノズルピッチを小さくすることが困難になる。すなわち、この場合は、ノズル近傍に設けられたモータ等の部材を互いに干渉しないように配置する必要があり、その結果、ノズルピッチが大きくなるという問題がある。
【0007】
ここで、分取分注作業の高速化には、隣接配置された子検体容器に連続して分注する、いわゆる前詰め処理が不可欠である。この前詰め処理を実現するためには、最小ノズルピッチを子検体容器間隔以下とする必要がある。しかし、既述したように各ノズルの近傍にモータ等を設けた場合、ノズルピッチを要求される最小ノズルピッチ(子検体容器間隔)以下とすることが困難であった。その結果、前詰め処理が出来ず、分取分注作業の効率低下を招いていた。
【0008】
そこで、本発明では、より効率的な分取分注作業が可能なノズル装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のノズル装置は、サンプルの分取分注用のノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置であって、各ノズルユニットは、サンプルの分取分注を行うノズルと、当該ノズルを保持するノズルホルダと、当該ノズルホルダが接続される本体部と、前記ノズルを昇降させる昇降機構と、前記ノズルを前記隣接方向に移動させてノズルピッチを可変するピッチ可変機構と、を備えており、各ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されている規制部材を有する場合に、当該規制部材を高さ方向にずらして配したことを特徴とする。
【0010】
好適な態様では、前記規制部材は、正面視で千鳥状に配されている。他の好適な態様では、前記昇降機構は、前記本体部の上側に設けられた上側プーリーと、下側に設けられた下側プーリーと、からなる一対のプーリーと、前記一対のプーリーに張架され、前記一対のプーリーの回転に応じて駆動するベルト部材であって、前記ノズルホルダが固着されたベルト部材と、前記上側プーリーおよび前記下側プーリーのいずれか一方に接続され、接続されたプーリーを駆動する昇降用モータと、を備えており、前記規制部材が前記昇降用モータである場合に、前記複数のノズルユニットそれぞれに設けられた複数の昇降用モータは、上側プーリーまたは下側プーリーに交互に接続される。
【0011】
他の好適な態様では、前記本体部が、規定の最小ノズルピッチより幅広である場合に、前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられたノズルは、前記本体部に対して、隣接するノズルに近接する方向にオフセットした状態で取り付けられる。
【0012】
他の好適な態様では、前記ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されていない非規制部材を有する場合に、前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられた非規制部材は、前記本体部に対して、隣接する非規制部材から離れる方向にオフセットした状態で取り付けられることを特徴とする。
【発明の効果】
【0013】
本発明によれば、本体部より幅広である規制部材が高さ方向にずらして配されているため、本体部同士の間隔を小さくすることができ、ひいては、ノズルピッチを狭ピッチにすることができる。その結果、分注の前詰め処理が可能となり、より効率的な分取分注作業が可能となる。
【発明を実施するための最良の形態】
【0014】
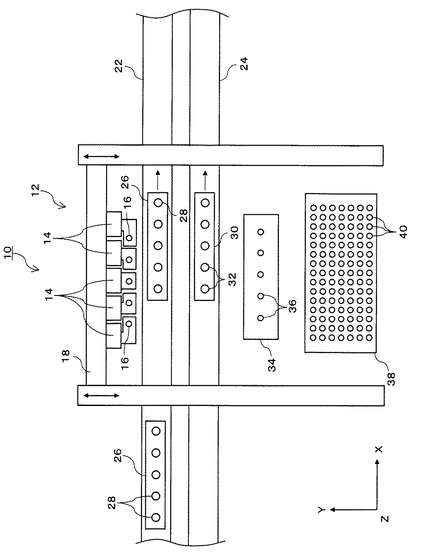
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略上面図である。この分注装置10には、親検体容器28および子検体容器32をそれぞれ搬送する親検体用搬送路22および子検体用搬送路24が設けられている。搬送路の途中位置には、ノズル装置12が設けられている。ノズル装置12は、図示しない制御部からの指示に応じて、親検体容器28に収容されている検体を分取し、これを子検体容器32に分注する。このノズル装置12は、後に詳説するように、互いに独立して駆動可能な五つのノズルユニット14を備えている。各ノズルユニット14には、検体の分取、分注を行うためのノズル16が装着されている。ノズル装置12の近傍には、ノズル装置12に装着されているノズル16を廃棄する廃棄部34と、ノズル装置12に新たなノズル16を供給する供給部38が設けられている。以下、このノズル装置12について詳説する。
【0015】
被験者等から採取された血液等の検体は、親検体として試験管等の親検体容器28に収容される。親検体容器28は、五個単位で親検体用ラック26に収容され、当該親検体用ラック26ごと親検体用搬送路22によって上流側から下流側(図1における左側から右側)へと搬送される。ノズル装置12は、この親検体容器28から適宜、検体を分取し、子検体容器32へと分注する。子検体容器32は、五個単位で子検体用ラック30に収容され、当該子検体用ラック30ごと子検体用搬送路24によって上流側から下流側へと搬送される。なお、親検体用ラック26に収容される親検体容器28の数、子検体用ラック30に収容される子検体容器32の数は、五つに限定されるものではなく、適宜、変更可能である。
【0016】
ノズル装置12は、搬送路22,24に跨って設けられている。下流側から搬送されてきた親検体用ラック26および子検体用ラック30は、このノズル装置12の下方で一時停止し、その間に分取、分注作業が行われる。ノズル装置12には、分取分注を行うノズルを備えたノズルユニット14が複数設けられている。このノズルユニット14の数は、複数であれば特に限定されないが、本実施形態では五つのノズルユニット14a〜14eを設けている。これは、一つの親検体用ラック26に搭載されている親検体全てに対して同時に分取作業を行うためである。
【0017】
この五つのノズルユニット14a〜14eは、互いに独立してX方向に移動できるようになっている。このX方向移動により、ノズルユニット14同士の間隔、ひいては、ノズルピッチを適宜、変更できる。また、各ノズルユニット14a〜14eは、ノズル16の昇降動作(Z方向移動)も互いに独立して行うことができる。また、五つのノズルユニット14a〜14eは、互いに連動して、搬送路に直交する水平方向(以下「Y方向」という)への移動が可能となっている。ノズル装置12をかかる構成とすることで、複数のノズル16を適宜、所望の位置に移動させることができ、また、分取分注作業を行うノズル16の数を適宜調整することができる。なお、ノズル装置12のより詳細な構成および駆動態様については後に詳説する。
【0018】
各ノズルユニット14に装着されているノズル16は、ディスポーザブル型のノズルチップである。このノズル16は、使用の度に廃棄され、交換される。この廃棄、交換のために、ノズル装置12の近傍には、廃棄部34と供給部38が設けられている。廃棄部34および供給部38は、いずれも、搬送路22,24の傍らであって、ノズルユニット14a〜14eの駆動範囲内に設置される。廃棄部34には、使用済みノズル16が投入される廃棄孔36が五つ設けられている。ノズル装置12は、分取分注作業後、廃棄部34まで移動し、廃棄孔36に使用済みノズル16を投入する。
【0019】
供給部38には、多数の交換用ノズル40がラックによって起立保持されている。ノズル装置12は、ノズル16を廃棄した後、当該供給部38に移動し、交換用ノズル40をノズルユニット14に装着する。ラック内の交換用ノズル40が全て使用されると、図示しない搬送機構により、新たな交換用ノズル40を搭載したラックが供給部38へと搬送される。
【0020】
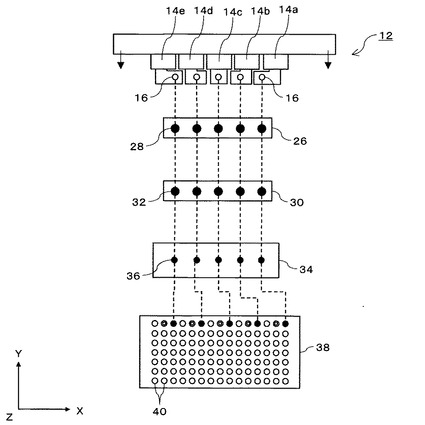
次に、この分注装置10におけるノズル装置12の駆動態様について図2、図3を用いて説明する。図2は親検体用ラック26に収容されている五つの親検体全てに対して分注処理を施す場合のノズル装置12の駆動の様子を示す図である。以下の説明では、五つのノズルユニット14a〜14eを、下流側から順に、第一ノズルユニット14a、第二ノズルユニット14b、第三ノズルユニット14c、第四ノズルユニット14d、第五ノズルユニット14eと呼ぶ。
【0021】
五つの親検体全てに対して分注処理を施す場合、未使用のノズル16を装着した五つのノズルユニット14a〜14eは、連動してY方向に移動し、親検体容器28の上方へと移動する。また、各ノズルユニット14a〜14eは、互いに独立してX方向に移動し、ノズルピッチを、親検体容器28のピッチに対応させる。その状態で、ノズル16を下降させるとともに各ノズルユニット14a〜14eに搭載されたポンプを駆動して、親検体容器28から所定量の検体を分取する。
【0022】
続いて、五つのノズルユニット14a〜14eは、連動してY方向に移動し、子検体容器32の上方へと移動する。この場合も、各ノズルユニット14a〜14eは、互いに独立して、X方向に移動し、ノズルピッチを、子検体容器32のピッチに対応させる。そしてノズル16を下降させるとともに、ノズル16内に保持されている検体を子検体容器32へと吐出する。吐出後は、ノズル16を上昇させて、廃棄部34へと移動する。
【0023】
廃棄部34上方へと移動したノズルユニット14は、ノズルピッチを廃棄孔36のピッチに変更した上でノズル16を下降させ、使用済みノズルを廃棄する。廃棄後は、供給部38へと移動し、新たなノズル16を装着する。ここで、本実施形態では、省スペース化のために、供給部38において、交換用ノズル40を、ノズル装置12の最小ノズルピッチより小さいピッチで配設している。換言すれば、五つのノズルユニット14a〜14eは、隣接する交換用ノズル40を同時に取得することができない構成となっている。そこで、本実施形態のノズル装置12は、ノズル交換の際、列状配置された交換用ノズル40を、複数個置き(図示例では2個置き)で取得するようにしている。そして、次回のノズル交換の際には、前回のノズル交換時に取得した交換用ノズル40の隣に位置する交換用ノズル40を取得するようにしている。例えば、図2において、1回目のノズル交換時に黒丸で図示した交換用ノズル40を取得した場合、2回目のノズル交換時には二重丸で図示した交換用ノズル40を取得する。
【0024】
以上の説明から明らかなように、本実施形態によれば、五つ分の検体の分取分注作業を同時に実行することができる。その結果、より効率的な分注処理が可能となる。
【0025】
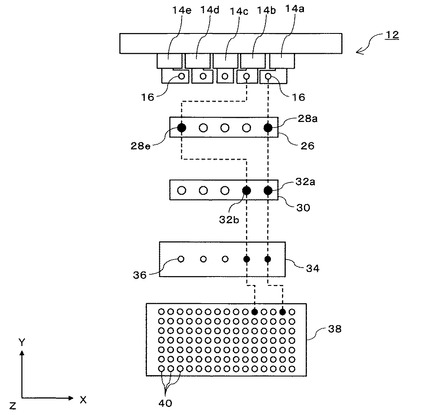
次に、親検体用ラック26に収容されている五つの親検体のうちの一部の親検体についてのみ分注処理を施す場合のノズル装置12の駆動の様子を図3を用いて説明する。図3は、親検体用ラック26の最上流側および最下流側に位置する二つの親検体容器28e,28aに収容された親検体に対してのみ分注処理を施す場合を例示している。
【0026】
この場合、五つのノズルユニット14のうち、下流側の二つのノズルユニット14a,14bのみが分注処理を行う。換言すれば、分注対象の親検体容器28の間隔が離れている場合でも、分注処理には必ず互いに連続するノズルユニット14が用いられる。親検体上方まで移動したノズルユニット14a〜14eは、互いに独立してX方向に移動し、第一ノズルユニット14aおよび第二ノズルユニット14bのノズルピッチを、分注処理対象の親検体容器28a,28eの間隔に対応させる。このとき、分注処理に関わらない残り三つのノズルユニット14c,14d,14eもX方向上流側へと移動し、他のノズルユニットとの物理的干渉を避ける。そして、第一、第二ノズルユニット14a,14bのみがノズル16を下降させ、検体の吸引を実行する。
【0027】
検体の分取がなされると、続いて、ノズルユニット14a〜14eは、子検体容器32上方へと移動する。ここで、検体の吸引がなされた親検体容器28の間隔があいていたとしても、吐出は、連続配置された子検体容器32になされる。すなわち、図示例では、子検体用ラック30に搭載された五つの子検体容器32のうち、下流側の連続した二つの子検体容器32a,32bに検体が吐出される。これは、検体が吐出されない、空の子検体容器32を下流に流さないためである。すなわち、下流に搬送される子検体容器32に、空の子検体容器32が混在していると、効率的な検査作業ができない。そのため、空の子検体容器32が混在している場合には、当該空容器を取り除き、子検体を収容した容器を詰める作業が必要となる。この詰め作業は、やはり、効率的な検査作業を阻害する。そこで、本実施形態では、適宜、ノズルピッチを変更し、常に連続した子検体容器に検体を吐出する、いわゆる、前詰め処理を行っている。
【0028】
検体の分注後は、図2の場合と同様の流れとなる。すなわち、廃棄部34において使用済みノズル16を廃棄し、供給部38において新たなノズル16を装着する。このとき、分注に使用された第一、第二ノズルユニット14a,14bのノズル16のみを廃棄交換してもよいし、五つのノズルユニット14a〜14e全てのノズル16を廃棄交換してもよい。
【0029】
以上の説明から明らかなように、五つのノズルユニット14a〜14eを、互いに独立してX方向に移動可能、および、ノズル16を昇降可能に構成することにより、効率的な前詰め処理が可能となる。
【0030】
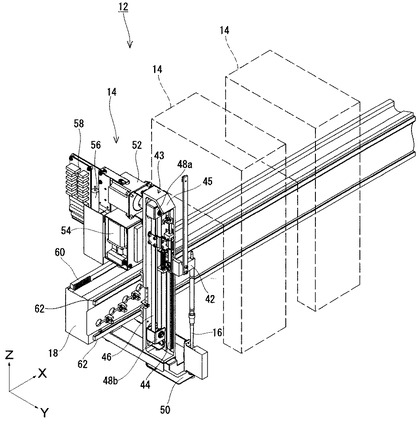
次に、上記のような駆動を実現し得るノズルユニット14の具体的な構成について詳説する。図4は、ノズルユニット14の斜視図である。各ノズルユニット14は、X方向に延びるX方向ガイド部材18に取り付けられている。X方向ガイド部材18の上面には、X方向に延びるラック(歯竿)60が設けられている。また、X方向ガイド部材18の側面には、ノズルユニット14のX方向移動を案内するX用ガイドレール62が設けられている。
【0031】
各ノズルユニット14は、ディスポーザブル型のノズル16が着脱自在に取り付けられている。このノズル16は、ノズルホルダ42により保持されている。ノズルホルダ42は、タワー部43に接続されている。タワー部43は、各ノズルユニット14の本体部として機能するもので、その内部には、ベルト部材46やプーリー48、Z用ガイドレール44等が設けられている。ベルト部材46は、ノズル16の昇降機構の一部を構成するもので、当該ベルト部材46の所定位置には、既述のノズルホルダ42が固着されている。そして、このベルト部材46が回転することにより、ノズル16が昇降される。ベルト部材46は、Z方向に配設された二つのプーリー、上側プーリー48aおよび下側プーリー48bに張架されている。
【0032】
このタワー部43の筐体45は、剛性材料からなり、Z方向に長尺で、断面略L字形状となっている。筐体45の一壁面には既述のプーリー48が、他の一壁面にはZ方向に延びるZ用ガイドレール44が取り付けられている。ノズルホルダ42は、このZ用ガイドレール44に係合するZ用ガイドブロックを備えており、当該Z用ガイドレール44に沿ってZ方向に移動する。また、タワー部43の背面には、X用ガイドレール62に係合するX用ガイドブロックも設けられている。そして、タワー部43は、ノズル16やノズルホルダ42とともに、当該X用ガイドレール62に案内されて、X方向に移動する。
【0033】
タワー部43の下端部には、ノズル16の先端からの液ダレを受ける液ダレ防止板50が設けられている。この液ダレ防止板50は、図示しないモータにより進退自在となっている。具体的には、ノズル16が下降状態の場合、液ダレ防止板50は、ノズル16の邪魔にならない退避位置で退避している。また、ノズル16が上昇状態の場合には、ノズル16の下方に移動し、当該ノズル16から垂れる液体を受ける。
【0034】
タワー部43の背後には、ノズル16の昇降駆動の駆動源であるZ用モータ52や、ノズルユニット14全体のX方向駆動の駆動源となるX用モータ54、吸引吐出の駆動源となるポンプ56、これらを駆動する回路基板58等が設けられている。このモータ52,54やポンプ56、回路基板58等も、既述のノズル16やタワー部43とともに、X方向に移動する。このX方向移動は、X用モータ54の出力軸に接続されたピニオン(歯車)59(図4では図示せず)が、X用モータ54の駆動に伴い回転することにより実現されている。ピニオン59は、X方向ガイド部材18の上面に設けられたラック60に係合しており、このラック60、ピニオン59の係合によりノズルユニット14のX方向直進移動が実現されている。
【0035】
ここで、既述した前詰め処理を行うためには、ノズル16の最小ノズルピッチが、親検体容器28間隔や子検体容器32間隔以下になるように構成される必要がある。そのためには、最小ノズルピッチにするべく各ノズルユニット14をX方向に移動させた際に、各ノズルユニット14の構成部品を物理的に干渉させないことが必要である。しかし、ノズルユニット14の構成部品の中には、モータやプーリーなど、比較的大型の部品も多く、これらを単純に並べただけでは、最小ノズルピッチを実現することは難しい。そこで、本実施形態では、各ノズルユニット14の構成部品の配置関係や、形状等を工夫し、より狭ピッチのノズルピッチを実現させている。以下、これについて詳説する。
【0036】
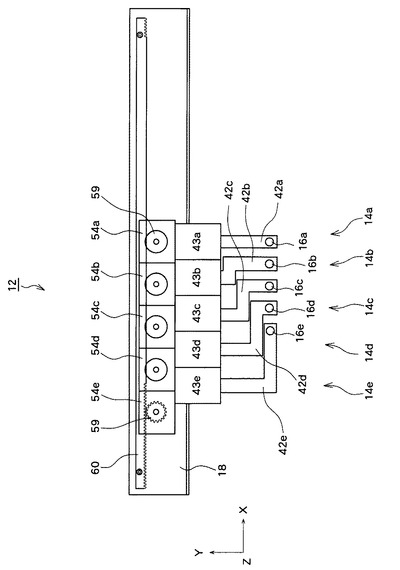
図5、図6は、ノズルホルダ42の形状およびX用モータ54の配置位置を説明するための図で、ノズル装置12の概略上面を示している。図5はノズルピッチ拡大時の様子を、図6はノズルピッチ最小時の様子をそれぞれ示している。図5、図6に図示するとおり、本実施形態では、ノズルユニット14ごとにノズルホルダ42の形状を変えている。具体的には、中心に位置する第三ノズルユニット14cのノズルホルダ42cは、ほぼ真正面に突き出た形状である。換言すれば、ノズル16cの中心とタワー部43cの中心が一致している状態になっている。一方、外側に位置する第一、第二、第四、第五ノズルユニット14a,14b,14d,14eのノズルホルダ42a,42b,42d,42eは、対応するタワー部43a,43b,43d,43eの中心から見て内側に屈曲した形状となっている。換言すれば、外側に位置するノズルユニット14a,14b,14d,14eのノズル16a,16b,16d,16eは、対応するタワー部43a,43b,43d,43eに対して内側にオフセットした状態となっている。このオフセット量は、外側に位置するほど大きい。したがって、本実施形態では、第二ノズルユニット14bと第四ノズルユニット14dとのオフセット量は等しく、また、第一ノズルユニット14aと第五ノズルユニット14eとのオフセット量は等しい。また、第二、第四ノズルユニット14b、14dのオフセット量に比べて、第一、第五ノズルユニット14a,4eのオフセット量は大きい。
【0037】
このように、ノズル16を、タワー部43に対して適宜オフセットさせるのは、ノズルピッチを狭ピッチにするためである。すなわち、五つのノズルユニット14a〜14eの全てにおいて、ノズル16の中心とタワー部43の中心を一致させた場合(ノズルユニット14cのような構成にした場合)、タワー部43の幅が最小ノズルピッチになる。しかし、小型部品等を選択したとしても、タワー部43の幅を、必要とされる最小ノズルピッチ(検体容器間隔)まで小さくすることは困難である。そこで、本実施形態では、ノズルユニット14の位置に応じて、ノズル16をタワー部43に対して適宜オフセットさせている。これにより、最小ノズルピッチを、タワー部43の幅より小さくすることができる。
【0038】
なお、本実施形態では、第三ノズルユニット14cを基準として、他のノズルユニット14a,14b,14d,14eのノズル16a,16b,16d,16eをオフセットさせているが、当然、他のノズルユニットに向かってオフセットさせてもよい。例えば、図7に図示するように、第一ノズルユニット14aに向かって、他のノズルユニット14b〜14eのノズル16a〜16eをオフセットさせてもよい。ただし、この場合、第一ノズルユニット14aから最も離れている第五ノズルユニット14eのオフセット量が大きくなるので、ノズルホルダ42eに十分な剛性を持たせることが必要となる。
【0039】
次に、X用モータ54の配置について図5,6を用いて説明する。なお、実際には、X用モータ54の上方にはZ用モータ52が位置しているが、図5,6では、見易さのためにZ用モータ52の図示は省略している。X用モータ54は、各タワー部43の背後に設けられており、その出力軸がZ方向下側に向くように配置されている。X用モータ54の出力軸には、ピニオン59が接続されている。このピニオン59は、X方向ガイド部材18の上面に設けられたラック60に係合しており、X用モータ54が回転駆動すると、X方向へと移動する。このピニオン59の移動により、ノズルユニット14がX方向に移動する。
【0040】
ここで、本実施形態で用いるX用モータ54は、タワー部43より大きい幅を有している。したがって、X用モータ54の中心と、タワー部43の中心と、を一致させて取り付けると、X用モータ54の幅分だけ、ノズルピッチが拡大することになる。
【0041】
そこで、本実施形態では、図5,6に図示するとおり、第一、第二、第四、第五ノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eを、タワー部43a,43b,43d,43eに対して外側にオフセットさせている。外側に位置するノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eを外側方向にオフセットさせることで、五つのタワー部43を近接させた際におけるX用モータ同士の干渉を防止できる。その結果、タワー部43同士の間隔、ひいては、ノズルピッチをより一層小さくできる。
【0042】
なお、本実施形態では、第三ノズルユニット14cを基準として、他のノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eをオフセットさせているが、当然、第三ノズルユニット14c以外のノズルユニットを基準としてオフセットさせてもよい。例えば、図7に図示するとおり、第一ノズルユニット14aを基準として、第二〜第五ノズルユニット14b〜14eのX用モータ54b〜54eをオフセットさせてもよい。
【0043】
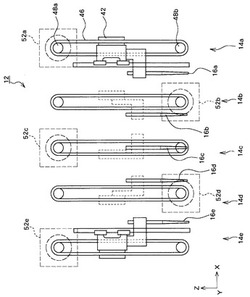
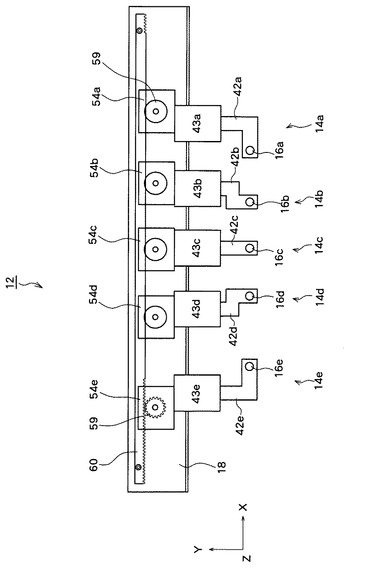
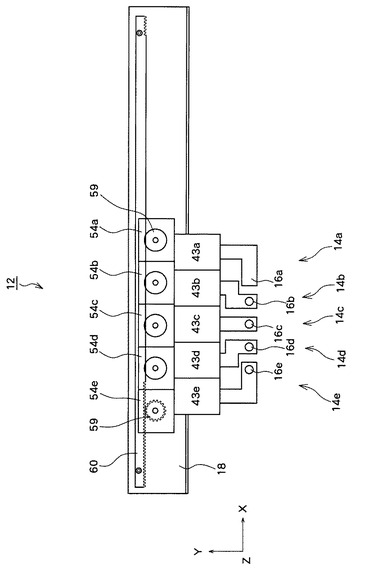
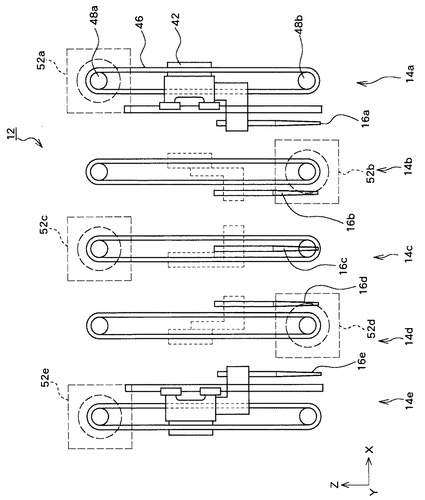
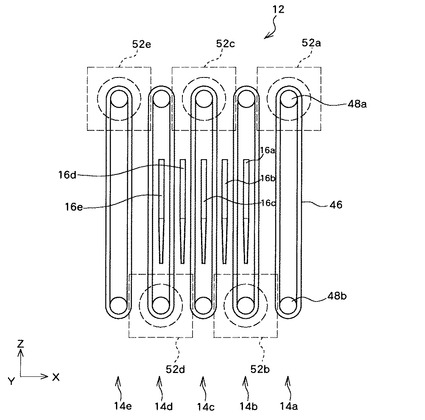
次に、Z用モータの配置位置について図8,9を用いて説明する。図8,9は、Z用モータ52の配置位置を説明する図であり、ノズル装置12の概略正面を示している。図8は、ノズルピッチ拡大時の様子を、図9はノズルピッチを最小としたときの様子をそれぞれ示している。
【0044】
Z用モータ52は、タワー部43の背後において、その出力軸がY方向手前側に向くように配置されている。Z用モータ52の出力軸は、タワー部43に回転可能に設置された上側プーリー48aまたは下側プーリー48bに接続されている。モータ駆動によりプーリー48が回転すると、当該プーリー48に張架されたベルト部材46が移動し、これにより、当該ベルト部材46に固着されたノズルホルダ42、ひいては、ノズル16が昇降する仕組みとなっている。
【0045】
本実施形態におけるZ用モータ52は、X用モータ54同様、タワー部43より幅広となっている。したがって、Z用モータ52を同一高さで隣接させると、ノズルユニット14同士が近接したときに干渉してしまい、ノズルピッチの拡大を招く。一方、Z用モータ52は、上側プーリー48aまたは下側プーリー48bに接続されている必要があり、X用モータ54のように、X方向にオフセットさせることはできない。
【0046】
そこで、本実施形態では、図8,9に図示する通り、五つのZ用モータ52を高さ方向にずらして配置している。より具体的には、第一、第三、第五ノズルユニット14a,14c,14eのZ用モータ52a,52c,52eは上側プーリー48aに接続し、第二、第四ノズルユニット14b,14dのZ用モータ52b、52dは下側プーリー48bに接続している。換言すれば、五つのノズルユニット14a〜14eそれぞれに設けられた五つのZ用モータ52a〜52eを、上側プーリー48aまたは下側プーリー48bに交互に接続させている。つまり、本実施形態においては、Z用モータ52は、正面視で、千鳥状に配されている。これにより、タワー部43が近接したとしても、Z用モータ52同士が干渉することがなく、ノズルピッチを小さくできる。
【0047】
以上、説明したように、本実施形態では、ノズル16からみて、X方向にオフセットできる部材(例えば、タワー部43やX用モータ54等)はX方向外側にオフセットさせ、X方向にオフセットできない部材(例えば、Z用モータ52等)は高さ方向にずらして配置している。その結果、ノズルピッチの更なる狭ピッチ化が実現できる。
【0048】
なお、説明した構成は一例であり、互いに独立してX方向移動およびノズルの昇降動作を実現しつつ、ノズルピッチの狭ピッチ化が実現できるのであれば、当然、他の構成であってもよい。例えば、ノズル16の昇降機構としては、例示したモータ、プーリー、ベルト部材を組み合わせた機構でなく、モータ、リードスクリューを組み合わせた機構や、モータ、ラック、ピニオンを組み合わせた機構等を用いてもよい。また、本実施形態では、ノズル16およびX用モータ54をタワー部43に対してX方向にオフセットさせ、Z用モータ52をZ方向にずらして配置しているが、当然、これら以外の部材をX方向にオフセット、あるいは、Z方向にずらして配置してもよい。
【0049】
また、本実施形態では、ノズルユニット14の数を五つとしているが、当然、これより少数、または、多数であってもよい。ただし、効率的な分注処理のためには、ノズルユニット14の数が、親検体用ラック26に搭載可能な親検体容器28の数と同じ、または、その約数であることが望ましい。
【図面の簡単な説明】
【0050】
【図1】本発明の実施形態である分注装置の概略上面図である。
【図2】ノズル装置の駆動の様子を示す図である。
【図3】ノズル装置の他の駆動の様子を示す図である。
【図4】ノズルユニットの斜視図である。
【図5】ノズルピッチ拡大時におけるノズル装置の概略上面図である。
【図6】ノズルピッチ最小時におけるノズル装置の概略上面図である。
【図7】ノズルピッチ最小時における他のノズル装置の概略上面図である。
【図8】ノズルピッチ拡大時におけるノズル装置の概略正面図である。
【図9】ノズルピッチ最小時におけるノズル装置の概略正面図である。
【符号の説明】
【0051】
10 分注装置、12 ノズル装置、14 ノズルユニット、16 ノズル、18 X方向ガイド部材、28 親検体容器、32 子検体容器、34 廃棄部、38 供給部、42 ノズルホルダ、43 タワー部、46 ベルト部材、48 プーリー、52 Z用モータ、54 X用モータ、56 ポンプ、58 回路基板。
【技術分野】
【0001】
本発明は、ノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置に関する。
【背景技術】
【0002】
血清及び血液などの検体検査を行う場合、検体の分取分注作業は、検体の分析を行う前処理工程にて行われている。この前処理工程では、検査依頼に従って、親検体(被検者より採血した検体等をいう)を別の容器に必要項目ごとに取り分けて検査項目ごとに子検体(取り分けられた検体をいう)を作成する。これらの作業を自動化する装置は、従来各種のものが提案され、臨床、研究施設、検査センター等にて使用されている。
【0003】
近年、検体検査の時間短縮に対する要望が強くなり、これに伴い、既述の分取分注作業の高速化についても高い要望がある。そこで、従来から、分取分注するノズルを複数備えた多連ノズルのノズル装置が提案されている。例えば、特許文献1には、二つのノズルによって、1回の動作で2つのサンプルを分取分注する分取分注装置が開示されている。この分取分注装置では、ノズルの近傍に設けられたモータにより当該ノズルを上下駆動し、ノズルから離れた位置に設けられたモータの駆動力をワイヤで伝達することで当該ノズルを隣接方向に駆動してノズルピッチを変更している。かかる構成によれば、1回の動作で、2つのサンプルを分取分注できるため、分取分注の作業時間を幅広に短縮できる。
【0004】
【特許文献1】特開平6−347467号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術を、3連以上のノズル装置に適用することは困難である。すなわち、特許文献1では、ワイヤを介してノズルに駆動力を伝達しており、各ノズルごとにワイヤを用意する必要がある。しかし、ノズルが3連以上の場合、3以上のワイヤを重複することなく引き回すことは困難であった。そして、結果として、更なる分取分注効率の向上が困難であった。また、ワイヤによる駆動力伝達を行った場合、当該ワイヤを設置するスペースが必要となり、ノズル装置全体の小型化を阻害していた。
【0006】
そこで、モータからの駆動力をワイヤを介することなく、ノズルに伝達することも考えられる。すなわち、各ノズルの近傍にモータやポンプ等を設け、比較的単純な伝達機構を介してモータの駆動力をノズルに伝達することが考えられる。しかし、この場合、ノズル間距離、いわゆるノズルピッチを小さくすることが困難になる。すなわち、この場合は、ノズル近傍に設けられたモータ等の部材を互いに干渉しないように配置する必要があり、その結果、ノズルピッチが大きくなるという問題がある。
【0007】
ここで、分取分注作業の高速化には、隣接配置された子検体容器に連続して分注する、いわゆる前詰め処理が不可欠である。この前詰め処理を実現するためには、最小ノズルピッチを子検体容器間隔以下とする必要がある。しかし、既述したように各ノズルの近傍にモータ等を設けた場合、ノズルピッチを要求される最小ノズルピッチ(子検体容器間隔)以下とすることが困難であった。その結果、前詰め処理が出来ず、分取分注作業の効率低下を招いていた。
【0008】
そこで、本発明では、より効率的な分取分注作業が可能なノズル装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明のノズル装置は、サンプルの分取分注用のノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置であって、各ノズルユニットは、サンプルの分取分注を行うノズルと、当該ノズルを保持するノズルホルダと、当該ノズルホルダが接続される本体部と、前記ノズルを昇降させる昇降機構と、前記ノズルを前記隣接方向に移動させてノズルピッチを可変するピッチ可変機構と、を備えており、各ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されている規制部材を有する場合に、当該規制部材を高さ方向にずらして配したことを特徴とする。
【0010】
好適な態様では、前記規制部材は、正面視で千鳥状に配されている。他の好適な態様では、前記昇降機構は、前記本体部の上側に設けられた上側プーリーと、下側に設けられた下側プーリーと、からなる一対のプーリーと、前記一対のプーリーに張架され、前記一対のプーリーの回転に応じて駆動するベルト部材であって、前記ノズルホルダが固着されたベルト部材と、前記上側プーリーおよび前記下側プーリーのいずれか一方に接続され、接続されたプーリーを駆動する昇降用モータと、を備えており、前記規制部材が前記昇降用モータである場合に、前記複数のノズルユニットそれぞれに設けられた複数の昇降用モータは、上側プーリーまたは下側プーリーに交互に接続される。
【0011】
他の好適な態様では、前記本体部が、規定の最小ノズルピッチより幅広である場合に、前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられたノズルは、前記本体部に対して、隣接するノズルに近接する方向にオフセットした状態で取り付けられる。
【0012】
他の好適な態様では、前記ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されていない非規制部材を有する場合に、前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられた非規制部材は、前記本体部に対して、隣接する非規制部材から離れる方向にオフセットした状態で取り付けられることを特徴とする。
【発明の効果】
【0013】
本発明によれば、本体部より幅広である規制部材が高さ方向にずらして配されているため、本体部同士の間隔を小さくすることができ、ひいては、ノズルピッチを狭ピッチにすることができる。その結果、分注の前詰め処理が可能となり、より効率的な分取分注作業が可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態について図面を参照して説明する。図1は、本発明の実施形態である分注装置10の概略上面図である。この分注装置10には、親検体容器28および子検体容器32をそれぞれ搬送する親検体用搬送路22および子検体用搬送路24が設けられている。搬送路の途中位置には、ノズル装置12が設けられている。ノズル装置12は、図示しない制御部からの指示に応じて、親検体容器28に収容されている検体を分取し、これを子検体容器32に分注する。このノズル装置12は、後に詳説するように、互いに独立して駆動可能な五つのノズルユニット14を備えている。各ノズルユニット14には、検体の分取、分注を行うためのノズル16が装着されている。ノズル装置12の近傍には、ノズル装置12に装着されているノズル16を廃棄する廃棄部34と、ノズル装置12に新たなノズル16を供給する供給部38が設けられている。以下、このノズル装置12について詳説する。
【0015】
被験者等から採取された血液等の検体は、親検体として試験管等の親検体容器28に収容される。親検体容器28は、五個単位で親検体用ラック26に収容され、当該親検体用ラック26ごと親検体用搬送路22によって上流側から下流側(図1における左側から右側)へと搬送される。ノズル装置12は、この親検体容器28から適宜、検体を分取し、子検体容器32へと分注する。子検体容器32は、五個単位で子検体用ラック30に収容され、当該子検体用ラック30ごと子検体用搬送路24によって上流側から下流側へと搬送される。なお、親検体用ラック26に収容される親検体容器28の数、子検体用ラック30に収容される子検体容器32の数は、五つに限定されるものではなく、適宜、変更可能である。
【0016】
ノズル装置12は、搬送路22,24に跨って設けられている。下流側から搬送されてきた親検体用ラック26および子検体用ラック30は、このノズル装置12の下方で一時停止し、その間に分取、分注作業が行われる。ノズル装置12には、分取分注を行うノズルを備えたノズルユニット14が複数設けられている。このノズルユニット14の数は、複数であれば特に限定されないが、本実施形態では五つのノズルユニット14a〜14eを設けている。これは、一つの親検体用ラック26に搭載されている親検体全てに対して同時に分取作業を行うためである。
【0017】
この五つのノズルユニット14a〜14eは、互いに独立してX方向に移動できるようになっている。このX方向移動により、ノズルユニット14同士の間隔、ひいては、ノズルピッチを適宜、変更できる。また、各ノズルユニット14a〜14eは、ノズル16の昇降動作(Z方向移動)も互いに独立して行うことができる。また、五つのノズルユニット14a〜14eは、互いに連動して、搬送路に直交する水平方向(以下「Y方向」という)への移動が可能となっている。ノズル装置12をかかる構成とすることで、複数のノズル16を適宜、所望の位置に移動させることができ、また、分取分注作業を行うノズル16の数を適宜調整することができる。なお、ノズル装置12のより詳細な構成および駆動態様については後に詳説する。
【0018】
各ノズルユニット14に装着されているノズル16は、ディスポーザブル型のノズルチップである。このノズル16は、使用の度に廃棄され、交換される。この廃棄、交換のために、ノズル装置12の近傍には、廃棄部34と供給部38が設けられている。廃棄部34および供給部38は、いずれも、搬送路22,24の傍らであって、ノズルユニット14a〜14eの駆動範囲内に設置される。廃棄部34には、使用済みノズル16が投入される廃棄孔36が五つ設けられている。ノズル装置12は、分取分注作業後、廃棄部34まで移動し、廃棄孔36に使用済みノズル16を投入する。
【0019】
供給部38には、多数の交換用ノズル40がラックによって起立保持されている。ノズル装置12は、ノズル16を廃棄した後、当該供給部38に移動し、交換用ノズル40をノズルユニット14に装着する。ラック内の交換用ノズル40が全て使用されると、図示しない搬送機構により、新たな交換用ノズル40を搭載したラックが供給部38へと搬送される。
【0020】
次に、この分注装置10におけるノズル装置12の駆動態様について図2、図3を用いて説明する。図2は親検体用ラック26に収容されている五つの親検体全てに対して分注処理を施す場合のノズル装置12の駆動の様子を示す図である。以下の説明では、五つのノズルユニット14a〜14eを、下流側から順に、第一ノズルユニット14a、第二ノズルユニット14b、第三ノズルユニット14c、第四ノズルユニット14d、第五ノズルユニット14eと呼ぶ。
【0021】
五つの親検体全てに対して分注処理を施す場合、未使用のノズル16を装着した五つのノズルユニット14a〜14eは、連動してY方向に移動し、親検体容器28の上方へと移動する。また、各ノズルユニット14a〜14eは、互いに独立してX方向に移動し、ノズルピッチを、親検体容器28のピッチに対応させる。その状態で、ノズル16を下降させるとともに各ノズルユニット14a〜14eに搭載されたポンプを駆動して、親検体容器28から所定量の検体を分取する。
【0022】
続いて、五つのノズルユニット14a〜14eは、連動してY方向に移動し、子検体容器32の上方へと移動する。この場合も、各ノズルユニット14a〜14eは、互いに独立して、X方向に移動し、ノズルピッチを、子検体容器32のピッチに対応させる。そしてノズル16を下降させるとともに、ノズル16内に保持されている検体を子検体容器32へと吐出する。吐出後は、ノズル16を上昇させて、廃棄部34へと移動する。
【0023】
廃棄部34上方へと移動したノズルユニット14は、ノズルピッチを廃棄孔36のピッチに変更した上でノズル16を下降させ、使用済みノズルを廃棄する。廃棄後は、供給部38へと移動し、新たなノズル16を装着する。ここで、本実施形態では、省スペース化のために、供給部38において、交換用ノズル40を、ノズル装置12の最小ノズルピッチより小さいピッチで配設している。換言すれば、五つのノズルユニット14a〜14eは、隣接する交換用ノズル40を同時に取得することができない構成となっている。そこで、本実施形態のノズル装置12は、ノズル交換の際、列状配置された交換用ノズル40を、複数個置き(図示例では2個置き)で取得するようにしている。そして、次回のノズル交換の際には、前回のノズル交換時に取得した交換用ノズル40の隣に位置する交換用ノズル40を取得するようにしている。例えば、図2において、1回目のノズル交換時に黒丸で図示した交換用ノズル40を取得した場合、2回目のノズル交換時には二重丸で図示した交換用ノズル40を取得する。
【0024】
以上の説明から明らかなように、本実施形態によれば、五つ分の検体の分取分注作業を同時に実行することができる。その結果、より効率的な分注処理が可能となる。
【0025】
次に、親検体用ラック26に収容されている五つの親検体のうちの一部の親検体についてのみ分注処理を施す場合のノズル装置12の駆動の様子を図3を用いて説明する。図3は、親検体用ラック26の最上流側および最下流側に位置する二つの親検体容器28e,28aに収容された親検体に対してのみ分注処理を施す場合を例示している。
【0026】
この場合、五つのノズルユニット14のうち、下流側の二つのノズルユニット14a,14bのみが分注処理を行う。換言すれば、分注対象の親検体容器28の間隔が離れている場合でも、分注処理には必ず互いに連続するノズルユニット14が用いられる。親検体上方まで移動したノズルユニット14a〜14eは、互いに独立してX方向に移動し、第一ノズルユニット14aおよび第二ノズルユニット14bのノズルピッチを、分注処理対象の親検体容器28a,28eの間隔に対応させる。このとき、分注処理に関わらない残り三つのノズルユニット14c,14d,14eもX方向上流側へと移動し、他のノズルユニットとの物理的干渉を避ける。そして、第一、第二ノズルユニット14a,14bのみがノズル16を下降させ、検体の吸引を実行する。
【0027】
検体の分取がなされると、続いて、ノズルユニット14a〜14eは、子検体容器32上方へと移動する。ここで、検体の吸引がなされた親検体容器28の間隔があいていたとしても、吐出は、連続配置された子検体容器32になされる。すなわち、図示例では、子検体用ラック30に搭載された五つの子検体容器32のうち、下流側の連続した二つの子検体容器32a,32bに検体が吐出される。これは、検体が吐出されない、空の子検体容器32を下流に流さないためである。すなわち、下流に搬送される子検体容器32に、空の子検体容器32が混在していると、効率的な検査作業ができない。そのため、空の子検体容器32が混在している場合には、当該空容器を取り除き、子検体を収容した容器を詰める作業が必要となる。この詰め作業は、やはり、効率的な検査作業を阻害する。そこで、本実施形態では、適宜、ノズルピッチを変更し、常に連続した子検体容器に検体を吐出する、いわゆる、前詰め処理を行っている。
【0028】
検体の分注後は、図2の場合と同様の流れとなる。すなわち、廃棄部34において使用済みノズル16を廃棄し、供給部38において新たなノズル16を装着する。このとき、分注に使用された第一、第二ノズルユニット14a,14bのノズル16のみを廃棄交換してもよいし、五つのノズルユニット14a〜14e全てのノズル16を廃棄交換してもよい。
【0029】
以上の説明から明らかなように、五つのノズルユニット14a〜14eを、互いに独立してX方向に移動可能、および、ノズル16を昇降可能に構成することにより、効率的な前詰め処理が可能となる。
【0030】
次に、上記のような駆動を実現し得るノズルユニット14の具体的な構成について詳説する。図4は、ノズルユニット14の斜視図である。各ノズルユニット14は、X方向に延びるX方向ガイド部材18に取り付けられている。X方向ガイド部材18の上面には、X方向に延びるラック(歯竿)60が設けられている。また、X方向ガイド部材18の側面には、ノズルユニット14のX方向移動を案内するX用ガイドレール62が設けられている。
【0031】
各ノズルユニット14は、ディスポーザブル型のノズル16が着脱自在に取り付けられている。このノズル16は、ノズルホルダ42により保持されている。ノズルホルダ42は、タワー部43に接続されている。タワー部43は、各ノズルユニット14の本体部として機能するもので、その内部には、ベルト部材46やプーリー48、Z用ガイドレール44等が設けられている。ベルト部材46は、ノズル16の昇降機構の一部を構成するもので、当該ベルト部材46の所定位置には、既述のノズルホルダ42が固着されている。そして、このベルト部材46が回転することにより、ノズル16が昇降される。ベルト部材46は、Z方向に配設された二つのプーリー、上側プーリー48aおよび下側プーリー48bに張架されている。
【0032】
このタワー部43の筐体45は、剛性材料からなり、Z方向に長尺で、断面略L字形状となっている。筐体45の一壁面には既述のプーリー48が、他の一壁面にはZ方向に延びるZ用ガイドレール44が取り付けられている。ノズルホルダ42は、このZ用ガイドレール44に係合するZ用ガイドブロックを備えており、当該Z用ガイドレール44に沿ってZ方向に移動する。また、タワー部43の背面には、X用ガイドレール62に係合するX用ガイドブロックも設けられている。そして、タワー部43は、ノズル16やノズルホルダ42とともに、当該X用ガイドレール62に案内されて、X方向に移動する。
【0033】
タワー部43の下端部には、ノズル16の先端からの液ダレを受ける液ダレ防止板50が設けられている。この液ダレ防止板50は、図示しないモータにより進退自在となっている。具体的には、ノズル16が下降状態の場合、液ダレ防止板50は、ノズル16の邪魔にならない退避位置で退避している。また、ノズル16が上昇状態の場合には、ノズル16の下方に移動し、当該ノズル16から垂れる液体を受ける。
【0034】
タワー部43の背後には、ノズル16の昇降駆動の駆動源であるZ用モータ52や、ノズルユニット14全体のX方向駆動の駆動源となるX用モータ54、吸引吐出の駆動源となるポンプ56、これらを駆動する回路基板58等が設けられている。このモータ52,54やポンプ56、回路基板58等も、既述のノズル16やタワー部43とともに、X方向に移動する。このX方向移動は、X用モータ54の出力軸に接続されたピニオン(歯車)59(図4では図示せず)が、X用モータ54の駆動に伴い回転することにより実現されている。ピニオン59は、X方向ガイド部材18の上面に設けられたラック60に係合しており、このラック60、ピニオン59の係合によりノズルユニット14のX方向直進移動が実現されている。
【0035】
ここで、既述した前詰め処理を行うためには、ノズル16の最小ノズルピッチが、親検体容器28間隔や子検体容器32間隔以下になるように構成される必要がある。そのためには、最小ノズルピッチにするべく各ノズルユニット14をX方向に移動させた際に、各ノズルユニット14の構成部品を物理的に干渉させないことが必要である。しかし、ノズルユニット14の構成部品の中には、モータやプーリーなど、比較的大型の部品も多く、これらを単純に並べただけでは、最小ノズルピッチを実現することは難しい。そこで、本実施形態では、各ノズルユニット14の構成部品の配置関係や、形状等を工夫し、より狭ピッチのノズルピッチを実現させている。以下、これについて詳説する。
【0036】
図5、図6は、ノズルホルダ42の形状およびX用モータ54の配置位置を説明するための図で、ノズル装置12の概略上面を示している。図5はノズルピッチ拡大時の様子を、図6はノズルピッチ最小時の様子をそれぞれ示している。図5、図6に図示するとおり、本実施形態では、ノズルユニット14ごとにノズルホルダ42の形状を変えている。具体的には、中心に位置する第三ノズルユニット14cのノズルホルダ42cは、ほぼ真正面に突き出た形状である。換言すれば、ノズル16cの中心とタワー部43cの中心が一致している状態になっている。一方、外側に位置する第一、第二、第四、第五ノズルユニット14a,14b,14d,14eのノズルホルダ42a,42b,42d,42eは、対応するタワー部43a,43b,43d,43eの中心から見て内側に屈曲した形状となっている。換言すれば、外側に位置するノズルユニット14a,14b,14d,14eのノズル16a,16b,16d,16eは、対応するタワー部43a,43b,43d,43eに対して内側にオフセットした状態となっている。このオフセット量は、外側に位置するほど大きい。したがって、本実施形態では、第二ノズルユニット14bと第四ノズルユニット14dとのオフセット量は等しく、また、第一ノズルユニット14aと第五ノズルユニット14eとのオフセット量は等しい。また、第二、第四ノズルユニット14b、14dのオフセット量に比べて、第一、第五ノズルユニット14a,4eのオフセット量は大きい。
【0037】
このように、ノズル16を、タワー部43に対して適宜オフセットさせるのは、ノズルピッチを狭ピッチにするためである。すなわち、五つのノズルユニット14a〜14eの全てにおいて、ノズル16の中心とタワー部43の中心を一致させた場合(ノズルユニット14cのような構成にした場合)、タワー部43の幅が最小ノズルピッチになる。しかし、小型部品等を選択したとしても、タワー部43の幅を、必要とされる最小ノズルピッチ(検体容器間隔)まで小さくすることは困難である。そこで、本実施形態では、ノズルユニット14の位置に応じて、ノズル16をタワー部43に対して適宜オフセットさせている。これにより、最小ノズルピッチを、タワー部43の幅より小さくすることができる。
【0038】
なお、本実施形態では、第三ノズルユニット14cを基準として、他のノズルユニット14a,14b,14d,14eのノズル16a,16b,16d,16eをオフセットさせているが、当然、他のノズルユニットに向かってオフセットさせてもよい。例えば、図7に図示するように、第一ノズルユニット14aに向かって、他のノズルユニット14b〜14eのノズル16a〜16eをオフセットさせてもよい。ただし、この場合、第一ノズルユニット14aから最も離れている第五ノズルユニット14eのオフセット量が大きくなるので、ノズルホルダ42eに十分な剛性を持たせることが必要となる。
【0039】
次に、X用モータ54の配置について図5,6を用いて説明する。なお、実際には、X用モータ54の上方にはZ用モータ52が位置しているが、図5,6では、見易さのためにZ用モータ52の図示は省略している。X用モータ54は、各タワー部43の背後に設けられており、その出力軸がZ方向下側に向くように配置されている。X用モータ54の出力軸には、ピニオン59が接続されている。このピニオン59は、X方向ガイド部材18の上面に設けられたラック60に係合しており、X用モータ54が回転駆動すると、X方向へと移動する。このピニオン59の移動により、ノズルユニット14がX方向に移動する。
【0040】
ここで、本実施形態で用いるX用モータ54は、タワー部43より大きい幅を有している。したがって、X用モータ54の中心と、タワー部43の中心と、を一致させて取り付けると、X用モータ54の幅分だけ、ノズルピッチが拡大することになる。
【0041】
そこで、本実施形態では、図5,6に図示するとおり、第一、第二、第四、第五ノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eを、タワー部43a,43b,43d,43eに対して外側にオフセットさせている。外側に位置するノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eを外側方向にオフセットさせることで、五つのタワー部43を近接させた際におけるX用モータ同士の干渉を防止できる。その結果、タワー部43同士の間隔、ひいては、ノズルピッチをより一層小さくできる。
【0042】
なお、本実施形態では、第三ノズルユニット14cを基準として、他のノズルユニット14a,14b,14d,14eのX用モータ54a,54b,54d,54eをオフセットさせているが、当然、第三ノズルユニット14c以外のノズルユニットを基準としてオフセットさせてもよい。例えば、図7に図示するとおり、第一ノズルユニット14aを基準として、第二〜第五ノズルユニット14b〜14eのX用モータ54b〜54eをオフセットさせてもよい。
【0043】
次に、Z用モータの配置位置について図8,9を用いて説明する。図8,9は、Z用モータ52の配置位置を説明する図であり、ノズル装置12の概略正面を示している。図8は、ノズルピッチ拡大時の様子を、図9はノズルピッチを最小としたときの様子をそれぞれ示している。
【0044】
Z用モータ52は、タワー部43の背後において、その出力軸がY方向手前側に向くように配置されている。Z用モータ52の出力軸は、タワー部43に回転可能に設置された上側プーリー48aまたは下側プーリー48bに接続されている。モータ駆動によりプーリー48が回転すると、当該プーリー48に張架されたベルト部材46が移動し、これにより、当該ベルト部材46に固着されたノズルホルダ42、ひいては、ノズル16が昇降する仕組みとなっている。
【0045】
本実施形態におけるZ用モータ52は、X用モータ54同様、タワー部43より幅広となっている。したがって、Z用モータ52を同一高さで隣接させると、ノズルユニット14同士が近接したときに干渉してしまい、ノズルピッチの拡大を招く。一方、Z用モータ52は、上側プーリー48aまたは下側プーリー48bに接続されている必要があり、X用モータ54のように、X方向にオフセットさせることはできない。
【0046】
そこで、本実施形態では、図8,9に図示する通り、五つのZ用モータ52を高さ方向にずらして配置している。より具体的には、第一、第三、第五ノズルユニット14a,14c,14eのZ用モータ52a,52c,52eは上側プーリー48aに接続し、第二、第四ノズルユニット14b,14dのZ用モータ52b、52dは下側プーリー48bに接続している。換言すれば、五つのノズルユニット14a〜14eそれぞれに設けられた五つのZ用モータ52a〜52eを、上側プーリー48aまたは下側プーリー48bに交互に接続させている。つまり、本実施形態においては、Z用モータ52は、正面視で、千鳥状に配されている。これにより、タワー部43が近接したとしても、Z用モータ52同士が干渉することがなく、ノズルピッチを小さくできる。
【0047】
以上、説明したように、本実施形態では、ノズル16からみて、X方向にオフセットできる部材(例えば、タワー部43やX用モータ54等)はX方向外側にオフセットさせ、X方向にオフセットできない部材(例えば、Z用モータ52等)は高さ方向にずらして配置している。その結果、ノズルピッチの更なる狭ピッチ化が実現できる。
【0048】
なお、説明した構成は一例であり、互いに独立してX方向移動およびノズルの昇降動作を実現しつつ、ノズルピッチの狭ピッチ化が実現できるのであれば、当然、他の構成であってもよい。例えば、ノズル16の昇降機構としては、例示したモータ、プーリー、ベルト部材を組み合わせた機構でなく、モータ、リードスクリューを組み合わせた機構や、モータ、ラック、ピニオンを組み合わせた機構等を用いてもよい。また、本実施形態では、ノズル16およびX用モータ54をタワー部43に対してX方向にオフセットさせ、Z用モータ52をZ方向にずらして配置しているが、当然、これら以外の部材をX方向にオフセット、あるいは、Z方向にずらして配置してもよい。
【0049】
また、本実施形態では、ノズルユニット14の数を五つとしているが、当然、これより少数、または、多数であってもよい。ただし、効率的な分注処理のためには、ノズルユニット14の数が、親検体用ラック26に搭載可能な親検体容器28の数と同じ、または、その約数であることが望ましい。
【図面の簡単な説明】
【0050】
【図1】本発明の実施形態である分注装置の概略上面図である。
【図2】ノズル装置の駆動の様子を示す図である。
【図3】ノズル装置の他の駆動の様子を示す図である。
【図4】ノズルユニットの斜視図である。
【図5】ノズルピッチ拡大時におけるノズル装置の概略上面図である。
【図6】ノズルピッチ最小時におけるノズル装置の概略上面図である。
【図7】ノズルピッチ最小時における他のノズル装置の概略上面図である。
【図8】ノズルピッチ拡大時におけるノズル装置の概略正面図である。
【図9】ノズルピッチ最小時におけるノズル装置の概略正面図である。
【符号の説明】
【0051】
10 分注装置、12 ノズル装置、14 ノズルユニット、16 ノズル、18 X方向ガイド部材、28 親検体容器、32 子検体容器、34 廃棄部、38 供給部、42 ノズルホルダ、43 タワー部、46 ベルト部材、48 プーリー、52 Z用モータ、54 X用モータ、56 ポンプ、58 回路基板。
【特許請求の範囲】
【請求項1】
ノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置であって、
各ノズルユニットは、
サンプルの分取分注を行うノズルと、
当該ノズルを保持するノズルホルダと、
当該ノズルホルダが接続される本体部と、
前記ノズルを昇降させる昇降機構と、
前記ノズルを前記隣接方向に移動させてノズルピッチを可変するピッチ可変機構と、
を備えており、
各ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されている規制部材を有する場合に、
当該規制部材を高さ方向にずらして配したことを特徴とするノズル装置。
【請求項2】
請求項1に記載のノズル装置であって、
前記規制部材は、正面視で千鳥状に配されていることを特徴とするノズル装置。
【請求項3】
請求項1または2に記載のノズル装置であって、
前記昇降機構は、
前記本体部の上側に設けられた上側プーリーと、下側に設けられた下側プーリーと、からなる一対のプーリーと、
前記一対のプーリーに張架され、前記一対のプーリーの回転に応じて駆動するベルト部材であって、前記ノズルホルダが固着されたベルト部材と、
前記上側プーリーおよび前記下側プーリーのいずれか一方に接続され、接続されたプーリーを駆動する昇降用モータと、
を備えており、
前記規制部材が前記昇降用モータである場合に、
前記複数のノズルユニットそれぞれに設けられた複数の昇降用モータは、上側プーリーまたは下側プーリーに交互に接続されることを特徴とするノズル装置。
【請求項4】
請求項1から3のいずれか1項に記載のノズル装置であって、
前記本体部が、規定の最小ノズルピッチより幅広である場合に、
前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられたノズルは、前記本体部に対して、隣接するノズルに近接する方向にオフセットした状態で取り付けられることを特徴とするノズル装置。
【請求項5】
請求項1から4のいずれか1項に記載のノズル装置であって、
前記ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されていない非規制部材を有する場合に、
前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられた非規制部材は、前記本体部に対して、隣接する非規制部材から離れる方向にオフセットした状態で取り付けられることを特徴とするノズル装置。
【請求項1】
ノズルが装着されたノズルユニットを複数備えるとともに、当該複数のノズルユニットを隣接配置したノズル装置であって、
各ノズルユニットは、
サンプルの分取分注を行うノズルと、
当該ノズルを保持するノズルホルダと、
当該ノズルホルダが接続される本体部と、
前記ノズルを昇降させる昇降機構と、
前記ノズルを前記隣接方向に移動させてノズルピッチを可変するピッチ可変機構と、
を備えており、
各ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されている規制部材を有する場合に、
当該規制部材を高さ方向にずらして配したことを特徴とするノズル装置。
【請求項2】
請求項1に記載のノズル装置であって、
前記規制部材は、正面視で千鳥状に配されていることを特徴とするノズル装置。
【請求項3】
請求項1または2に記載のノズル装置であって、
前記昇降機構は、
前記本体部の上側に設けられた上側プーリーと、下側に設けられた下側プーリーと、からなる一対のプーリーと、
前記一対のプーリーに張架され、前記一対のプーリーの回転に応じて駆動するベルト部材であって、前記ノズルホルダが固着されたベルト部材と、
前記上側プーリーおよび前記下側プーリーのいずれか一方に接続され、接続されたプーリーを駆動する昇降用モータと、
を備えており、
前記規制部材が前記昇降用モータである場合に、
前記複数のノズルユニットそれぞれに設けられた複数の昇降用モータは、上側プーリーまたは下側プーリーに交互に接続されることを特徴とするノズル装置。
【請求項4】
請求項1から3のいずれか1項に記載のノズル装置であって、
前記本体部が、規定の最小ノズルピッチより幅広である場合に、
前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられたノズルは、前記本体部に対して、隣接するノズルに近接する方向にオフセットした状態で取り付けられることを特徴とするノズル装置。
【請求項5】
請求項1から4のいずれか1項に記載のノズル装置であって、
前記ノズルユニットが、前記本体部より幅広であるとともに前記本体部に対する隣接方向の位置が規制されていない非規制部材を有する場合に、
前記複数のノズルユニットのうち少なくとも一部のノズルユニットに設けられた非規制部材は、前記本体部に対して、隣接する非規制部材から離れる方向にオフセットした状態で取り付けられることを特徴とするノズル装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−85885(P2007−85885A)
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願番号】特願2005−275066(P2005−275066)
【出願日】平成17年9月22日(2005.9.22)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
【公開日】平成19年4月5日(2007.4.5)
【国際特許分類】
【出願日】平成17年9月22日(2005.9.22)
【出願人】(390029791)アロカ株式会社 (899)
【Fターム(参考)】
[ Back to top ]