
ハイブリッド眼球追跡システムおよび付随する方法
外科的処置中における眼球変化(12,13)を追跡するためのシステム(10)および方法は、拡張も麻痺も受けていない眼球(90)に向けて該眼球に安全な光ビーム(21)を誘導することを含む。反射光ビーム(23)が検出され(22)、予め定められた周波数で眼球の少なくとも1つの幾何学的パラメータについて反射光ビーム内に含まれるデータに基づき測定(17)が行われ(105)、これらから該少なくとも1つの幾何学的パラメータにおける変化が計算される(106)。計算された変化は、外科手術中のレーザービームショット(14)の誘導を動的に調整するために用いられる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーザー外科手術中などの眼球追跡を実施するためのシステムおよび方法、そしてより特定的には、高速および低速の両方の眼球運動を追跡するためのこのようなシステムおよび方法に関する。
【背景技術】
【0002】
眼球が生じさせる波面収差の測定は、レーザー外科手術矯正システムを駆動するためのデータを提供するものとして、当該技術分野において知られている。波面解析により光学系の収差を客観的に測定し、外科的に矯正するための方法およびシステムの種々の実施形態が、2000年5月8日出願の同一所有権者の米国出願第09/566,668号の「波面解析を用いた光学系の客観的測定および矯正のための装置および方法」、および同一所有権者の登録米国特許第5,632,742号および5,980,513号の中で開示され、これらの全てを本願発明に参考として取り入れている
【0003】
矯正用レーザー手術は、例えば、視力を改善するために、計算された形状を達成すべく、角膜表面の部分をレーザー切除することによって実施可能である。この場合、角膜に対しレーザーショットを当てる一方で、外科手術中の眼球運動を捉えることが望ましい。高速な無意識の(「衝動性」)眼球運動は、非常に短い持続時間、つまり10〜20msec程度の動作、および最高1□の回転からなる。この運動は、治療用レーザーの運動を計算する基となる視軸の決定を困難にする。’513号特許は、以下でさらに詳しく記述されるようなx、y視線追跡システムでこの問題に対処している。
【0004】
衝動性眼球運動よりも低速である他の2つのタイプの眼球運動は、眼球回旋および並進運動からなる。並進運動は、現在、非対称の瞳孔の拡張と収縮が追跡点をシフトさせ偏心させる結果とならないよう、瞳孔を麻痺させることによって、除去されている。インクマークといった印の機械によらない観察および/またはレチクル調整が、患者の測定と外科的位置との間の体位変化の結果もたらす可能性のある、処置中の眼球回旋を捉えるために、標準的に用いられる。
【特許文献1】米国出願第09/566,668号明細書
【特許文献2】米国特許第5,632,742号明細書
【特許文献3】米国特許第5,980,513号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、本発明の目的は、眼球の収差を矯正するためのレーザー手術中において眼球運動を追跡するシステムおよび方法を提供することである。
【0006】
レーザー手術中に眼球を拡張(dilation)させる必要性を軽減する眼球運動追跡システムおよびその方法を提供することがさらなる目的である。
【0007】
もう1つの目的は、レーザー外科手術中に患者の瞳孔を麻痺させる(paralyzing)必要性を軽減する眼球運動追跡システムおよびその方法を提供することである。
【0008】
また、高速および低速の両方の眼球運動を追跡するためのシステムおよび方法を提供することも目的である。
【0009】
もう1つの目的は、レーザー外科手術中にビーム照射パラメータに対する調整を自動化するためのシステムおよび方法を提供することにある。
【課題を解決するための手段】
【0010】
これらの目的は、本発明、つまりハイブリッド眼球追跡システムおよびそれに付随する方法によって達成される。この方法は、レーザー視力矯正手術といった外科的処置中における眼球変化を追跡するためのものであり、眼球に向けて眼球に安全な光ビームを誘導する段階を含む。眼球は、拡張および麻痺を達成すべく、実質的に未治療(すなわち薬物またはその他による、最小限の治療)で良い。次に、眼球からの反射光ビームが検出され、この反射光ビーム内に含まれるデータに基づいて複数の測定が実施される。この測定は、予め定められた周波数で眼球の少なくとも1つの幾何学的パラメータについて行われ、それらから、該少なくとも1つの幾何学的パラメータの変化が計算される。
【0011】
本発明のもう1つの態様は、眼球に対する矯正的処置を実施するための方法に向けられる。この方法は、予め定められたパターンで眼球の角膜に複数の切除用レーザービームショットを誘導する段階を含む。ここでもまた、眼球は拡張および麻痺を達成すべく、実質的に未治療で良い。眼球変化は、上述の通りに追跡される。この眼球変化は、計算された変化に基づきレーザービームショットの誘導を動的に調整することによって補償される。
【0012】
上述の方法を実施するためのシステムもまた、本発明の一部として提供される。
【0013】
操作の方法および構成の両方に関して本発明に固有の特徴が、そのさらなる目的および利点と共に、以下の記述および添付図面を参照することによってより良く理解されるであろう。図面は例示および説明を目的としており、本発明を限定することを意図していないということを明示的に理解すべきである。本発明により達成されるこれらの目的および提供される利点は、以下に続く説明と添付図面とにより一層明らかとなることだろう。
【0014】
本発明およびその利点は、同じ参照番号が同じ特徴を表わす添付図面と併用して以下の説明を参照することによって、より完全に理解することができる。
【発明を実施するための最良の形態】
【0015】
本発明の好ましい実施形態の説明を、以下に図1〜3を参考にしながら提示する。
【0016】
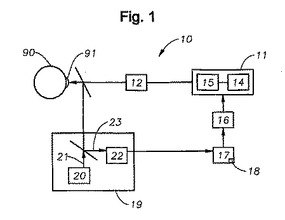
拡張せず(undilated)麻痺していない(unparalyzed)眼球に対して矯正的処置を施すためのシステム10(図1)および方法100(図2)が提供される。システム10は、外科手術用構成要素11および追跡用構成要素を含み、この追跡用構成要素自体は、’513特許で開示されているような高速眼球運動(衝動性)追跡装置12および低速運動追跡装置13からなる。追跡用構成要素12、13は、外科的処置中において眼球の変化を追跡するためのものである。
【0017】
外科用構成要素11は、例えば、波面測定(wavefront measurement)に基づいて(ただしこれは制限を意図していない)、予め定められたパターンで眼球90の角膜91にレーザービームショットを発出する(ブロック101)ように適合された切除(ablate)用レーザー14および付随する光学素子15を含んでなる。外科用構成要素11は、ソフトウェア18を搭載したプロセッサ17の制御下にあるビーム並進運動(translation)構成要素16により制御される。ソフトウェア18は、追跡用構成要素12、13から受信したデータについて計算を行うための手段を含む。
【0018】
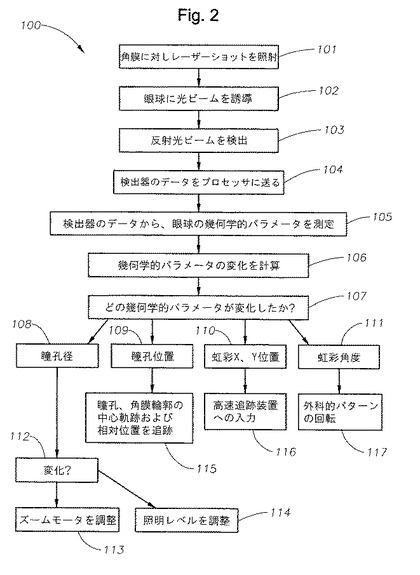
低速追跡装置13は、眼球90に向けて該眼球に安全な光ビーム21を誘導する(ブロック102)ように適合された照明手段20を備えるビデオシステム19を含んでなる。ビデオシステム19はさらに、眼球90からの反射光ビーム23を検出し(ブロック103)、例えば血管、角膜輪郭形状および楕円率のような強膜の特徴、虹彩の特徴および人工アイマークといった特徴を追跡するための検出器22を含んでいる。検出器22からのデータはプロセッサ17に送られ(ブロック104)、それらから、一実施形態においては好ましくは250Hzより低い予め定められた周波数で、眼球90の少なくとも1つの幾何学的(geometric)パラメータについて、複数の測定が行われる(ブロック105)。これらの測定から、並進運動および/または眼球回旋変化を含む少なくとも1つの幾何学的パラメータの変化が計算される(ブロック106)。
【0019】
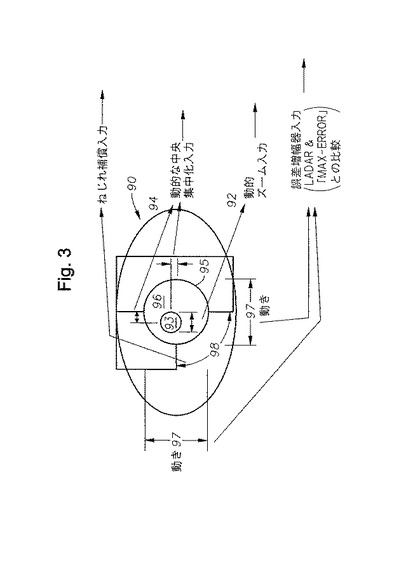
幾何学的パラメータ(図3参照)は、例えば、瞳孔93の直径92(ブロック108)、角膜輪郭95との関係における瞳孔(中心軌跡)の位置94(ブロック109)、およびx、y座標97における(ブロック110)および眼球回旋角度98としての(ブロック111)虹彩の位置のうちの少なくとも1つを含み得る(ブロック107)。
【0020】
瞳孔径92が変化した場合、瞳孔の直径92を実質的に一定に維持すべくズームモータ24が調整する(ブロック113)か、または部屋の中の周辺照明レベルが調整される(ブロック114)かのいずれかである(ブロック112)。好ましくは、この測定は、瞳孔径92の変化速度の約10倍の速度で更新される。
【0021】
瞳孔の位置94が角膜輪郭95に対して変化した場合、該角膜輪郭95からのx、yオフセット量が計算され、瞳孔93および角膜輪郭95のそれぞれの中心軌跡が、それらの相対位置に沿って、追跡される(ブロック115)。好ましくは、この測定は、瞳孔直径92の変化速度の約10倍の速度で更新される。瞳孔の中心軌跡のオフセット量または「瞳孔のドリフト」は虹彩の状態に依存し、患者毎に大きくなったり小さくなったりし得るもので、そして外科手術中にわずかに増減し得る。この変位は、高速虹彩/瞳孔境界・追跡装置が認知しないものであるかもしれず、ショットが、瞳孔の中心軌跡ドリフトとは無関係に、角膜上の所望の位置で終わるようにエキシマ・スキャナミラーで全てのショット位置に対してその変位がベクトル的に加算される必要があるかもしれない。
【0022】
瞳孔サイズの変化に起因する瞳孔中心ドリフトを捉える好ましいやり方は、異なる照明条件下で瞳孔のビデオ画像を用いて、手術前回診のときに角膜輪郭の中心に対するその瞳孔の中心位置を特徴づけすることである。瞳孔のサイズ変化に対して瞳孔の中心がどのようにシフトするかについての式を、かかる術前評価から導き出すことができる。外科手術中、もしビデオ追跡装置が瞳孔のサイズ変化を検知すれば、同じドリフトオフセットが存在するであろうことが想定される。このことはすなわち、高速追跡位置に対して瞳孔のドリフトが及ぼすであろう影響を「ゼロにする」ために、エキシマ・スキャナーがこれらのショットを配置することになる位置における等しくかつ反対のオフセット量を適用しなければならず、そしてこのことが実時間の瞳孔中心のまわりのみに閉じたことで、角膜輪郭または角膜に対する瞳孔中心の相対位置の変化を捉えられなくなる、ということを意味する。
【0023】
x、y座標97内の虹彩の位置が、例えば、眼球全体を動かしてしまうような通常の頭のシフトやあごの横揺れ、その他の動きに起因して、エキシマレーザーの中心に対して変化した場合、眼球は、高速4虹彩スポット閉ループLADAR追跡装置を用いて追跡されることになる。このLADAR追跡装置は、空間で安定化した画像を維持するように追跡対象の眼球の位置を常時調整するために追跡用検流計ミラーを用いている。
【0024】
虹彩96の回転位置98が変化する場合、眼球回旋を補償すべく、エキシマ走査ミラーにより生成される外科的パターンの回転を計算しかつ実行するために、その新しい位置が用いられる(ブロック117)。特徴認識、強膜血管検出96を用いて、または眼球90上にマーキングされた特徴について、ビデオ追跡を実施することができる。好ましくはこの測定は、眼の回転の変化速度の10倍の速度で更新される。
【0025】
所望のレーザー切除パターンの角膜上の位置を、エキシマビーム走査位置の場所に対してシフトさせるべき、ビデオ画像上で検知された眼球変化は、計算された変化に基づき、エキシマレーザー走査ミラーを介してレーザービームショットの誘導を動的に調整することによって補償される。
【0026】
当業者であれば、その他の実施形態および用途も本発明のために考慮可能であるということが分かるであろう。例えば、該眼球追跡装置監視システムおよび方法は、心理学および生理学的テストの利用分野といった現場を含め、外科的現場以外の環境でも使用可能である。
【0027】
前述の説明においては、簡潔さ、明確さそして理解を目的として特定の用語を使用してきたが、かかる用語は本明細書で記述を目的として使用され広義に解釈されるよう意図されていることから、先行技術の必要条件を超えていかなる不要な制限もそこから暗示されるべきものではない。その上、本明細書で例示され記述された装置の実施形態は例示を目的とするものであり、本発明の範囲は、正に同じ構造細部に制限されるものではない。
【0028】
ここで本発明、その好ましい実施形態の構造、操作および用途およびそれによって得られる有利な新しくかつ有用な結果について記述してきたが、当業者にとって明白な新しく有用な構造および適正な機械的均等物は、添付の特許請求の範囲内で記述されている。
【図面の簡単な説明】
【0029】
【図1】本発明のハイブリッド眼球追跡システムの概略図である。
【図2】本発明の低速運動追跡装置制御システムのフローチャートである。
【図3】システムにより監視されるパラメータを例示する眼球の概略図である。
【技術分野】
【0001】
本発明は、レーザー外科手術中などの眼球追跡を実施するためのシステムおよび方法、そしてより特定的には、高速および低速の両方の眼球運動を追跡するためのこのようなシステムおよび方法に関する。
【背景技術】
【0002】
眼球が生じさせる波面収差の測定は、レーザー外科手術矯正システムを駆動するためのデータを提供するものとして、当該技術分野において知られている。波面解析により光学系の収差を客観的に測定し、外科的に矯正するための方法およびシステムの種々の実施形態が、2000年5月8日出願の同一所有権者の米国出願第09/566,668号の「波面解析を用いた光学系の客観的測定および矯正のための装置および方法」、および同一所有権者の登録米国特許第5,632,742号および5,980,513号の中で開示され、これらの全てを本願発明に参考として取り入れている
【0003】
矯正用レーザー手術は、例えば、視力を改善するために、計算された形状を達成すべく、角膜表面の部分をレーザー切除することによって実施可能である。この場合、角膜に対しレーザーショットを当てる一方で、外科手術中の眼球運動を捉えることが望ましい。高速な無意識の(「衝動性」)眼球運動は、非常に短い持続時間、つまり10〜20msec程度の動作、および最高1□の回転からなる。この運動は、治療用レーザーの運動を計算する基となる視軸の決定を困難にする。’513号特許は、以下でさらに詳しく記述されるようなx、y視線追跡システムでこの問題に対処している。
【0004】
衝動性眼球運動よりも低速である他の2つのタイプの眼球運動は、眼球回旋および並進運動からなる。並進運動は、現在、非対称の瞳孔の拡張と収縮が追跡点をシフトさせ偏心させる結果とならないよう、瞳孔を麻痺させることによって、除去されている。インクマークといった印の機械によらない観察および/またはレチクル調整が、患者の測定と外科的位置との間の体位変化の結果もたらす可能性のある、処置中の眼球回旋を捉えるために、標準的に用いられる。
【特許文献1】米国出願第09/566,668号明細書
【特許文献2】米国特許第5,632,742号明細書
【特許文献3】米国特許第5,980,513号明細書
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、本発明の目的は、眼球の収差を矯正するためのレーザー手術中において眼球運動を追跡するシステムおよび方法を提供することである。
【0006】
レーザー手術中に眼球を拡張(dilation)させる必要性を軽減する眼球運動追跡システムおよびその方法を提供することがさらなる目的である。
【0007】
もう1つの目的は、レーザー外科手術中に患者の瞳孔を麻痺させる(paralyzing)必要性を軽減する眼球運動追跡システムおよびその方法を提供することである。
【0008】
また、高速および低速の両方の眼球運動を追跡するためのシステムおよび方法を提供することも目的である。
【0009】
もう1つの目的は、レーザー外科手術中にビーム照射パラメータに対する調整を自動化するためのシステムおよび方法を提供することにある。
【課題を解決するための手段】
【0010】
これらの目的は、本発明、つまりハイブリッド眼球追跡システムおよびそれに付随する方法によって達成される。この方法は、レーザー視力矯正手術といった外科的処置中における眼球変化を追跡するためのものであり、眼球に向けて眼球に安全な光ビームを誘導する段階を含む。眼球は、拡張および麻痺を達成すべく、実質的に未治療(すなわち薬物またはその他による、最小限の治療)で良い。次に、眼球からの反射光ビームが検出され、この反射光ビーム内に含まれるデータに基づいて複数の測定が実施される。この測定は、予め定められた周波数で眼球の少なくとも1つの幾何学的パラメータについて行われ、それらから、該少なくとも1つの幾何学的パラメータの変化が計算される。
【0011】
本発明のもう1つの態様は、眼球に対する矯正的処置を実施するための方法に向けられる。この方法は、予め定められたパターンで眼球の角膜に複数の切除用レーザービームショットを誘導する段階を含む。ここでもまた、眼球は拡張および麻痺を達成すべく、実質的に未治療で良い。眼球変化は、上述の通りに追跡される。この眼球変化は、計算された変化に基づきレーザービームショットの誘導を動的に調整することによって補償される。
【0012】
上述の方法を実施するためのシステムもまた、本発明の一部として提供される。
【0013】
操作の方法および構成の両方に関して本発明に固有の特徴が、そのさらなる目的および利点と共に、以下の記述および添付図面を参照することによってより良く理解されるであろう。図面は例示および説明を目的としており、本発明を限定することを意図していないということを明示的に理解すべきである。本発明により達成されるこれらの目的および提供される利点は、以下に続く説明と添付図面とにより一層明らかとなることだろう。
【0014】
本発明およびその利点は、同じ参照番号が同じ特徴を表わす添付図面と併用して以下の説明を参照することによって、より完全に理解することができる。
【発明を実施するための最良の形態】
【0015】
本発明の好ましい実施形態の説明を、以下に図1〜3を参考にしながら提示する。
【0016】
拡張せず(undilated)麻痺していない(unparalyzed)眼球に対して矯正的処置を施すためのシステム10(図1)および方法100(図2)が提供される。システム10は、外科手術用構成要素11および追跡用構成要素を含み、この追跡用構成要素自体は、’513特許で開示されているような高速眼球運動(衝動性)追跡装置12および低速運動追跡装置13からなる。追跡用構成要素12、13は、外科的処置中において眼球の変化を追跡するためのものである。
【0017】
外科用構成要素11は、例えば、波面測定(wavefront measurement)に基づいて(ただしこれは制限を意図していない)、予め定められたパターンで眼球90の角膜91にレーザービームショットを発出する(ブロック101)ように適合された切除(ablate)用レーザー14および付随する光学素子15を含んでなる。外科用構成要素11は、ソフトウェア18を搭載したプロセッサ17の制御下にあるビーム並進運動(translation)構成要素16により制御される。ソフトウェア18は、追跡用構成要素12、13から受信したデータについて計算を行うための手段を含む。
【0018】
低速追跡装置13は、眼球90に向けて該眼球に安全な光ビーム21を誘導する(ブロック102)ように適合された照明手段20を備えるビデオシステム19を含んでなる。ビデオシステム19はさらに、眼球90からの反射光ビーム23を検出し(ブロック103)、例えば血管、角膜輪郭形状および楕円率のような強膜の特徴、虹彩の特徴および人工アイマークといった特徴を追跡するための検出器22を含んでいる。検出器22からのデータはプロセッサ17に送られ(ブロック104)、それらから、一実施形態においては好ましくは250Hzより低い予め定められた周波数で、眼球90の少なくとも1つの幾何学的(geometric)パラメータについて、複数の測定が行われる(ブロック105)。これらの測定から、並進運動および/または眼球回旋変化を含む少なくとも1つの幾何学的パラメータの変化が計算される(ブロック106)。
【0019】
幾何学的パラメータ(図3参照)は、例えば、瞳孔93の直径92(ブロック108)、角膜輪郭95との関係における瞳孔(中心軌跡)の位置94(ブロック109)、およびx、y座標97における(ブロック110)および眼球回旋角度98としての(ブロック111)虹彩の位置のうちの少なくとも1つを含み得る(ブロック107)。
【0020】
瞳孔径92が変化した場合、瞳孔の直径92を実質的に一定に維持すべくズームモータ24が調整する(ブロック113)か、または部屋の中の周辺照明レベルが調整される(ブロック114)かのいずれかである(ブロック112)。好ましくは、この測定は、瞳孔径92の変化速度の約10倍の速度で更新される。
【0021】
瞳孔の位置94が角膜輪郭95に対して変化した場合、該角膜輪郭95からのx、yオフセット量が計算され、瞳孔93および角膜輪郭95のそれぞれの中心軌跡が、それらの相対位置に沿って、追跡される(ブロック115)。好ましくは、この測定は、瞳孔直径92の変化速度の約10倍の速度で更新される。瞳孔の中心軌跡のオフセット量または「瞳孔のドリフト」は虹彩の状態に依存し、患者毎に大きくなったり小さくなったりし得るもので、そして外科手術中にわずかに増減し得る。この変位は、高速虹彩/瞳孔境界・追跡装置が認知しないものであるかもしれず、ショットが、瞳孔の中心軌跡ドリフトとは無関係に、角膜上の所望の位置で終わるようにエキシマ・スキャナミラーで全てのショット位置に対してその変位がベクトル的に加算される必要があるかもしれない。
【0022】
瞳孔サイズの変化に起因する瞳孔中心ドリフトを捉える好ましいやり方は、異なる照明条件下で瞳孔のビデオ画像を用いて、手術前回診のときに角膜輪郭の中心に対するその瞳孔の中心位置を特徴づけすることである。瞳孔のサイズ変化に対して瞳孔の中心がどのようにシフトするかについての式を、かかる術前評価から導き出すことができる。外科手術中、もしビデオ追跡装置が瞳孔のサイズ変化を検知すれば、同じドリフトオフセットが存在するであろうことが想定される。このことはすなわち、高速追跡位置に対して瞳孔のドリフトが及ぼすであろう影響を「ゼロにする」ために、エキシマ・スキャナーがこれらのショットを配置することになる位置における等しくかつ反対のオフセット量を適用しなければならず、そしてこのことが実時間の瞳孔中心のまわりのみに閉じたことで、角膜輪郭または角膜に対する瞳孔中心の相対位置の変化を捉えられなくなる、ということを意味する。
【0023】
x、y座標97内の虹彩の位置が、例えば、眼球全体を動かしてしまうような通常の頭のシフトやあごの横揺れ、その他の動きに起因して、エキシマレーザーの中心に対して変化した場合、眼球は、高速4虹彩スポット閉ループLADAR追跡装置を用いて追跡されることになる。このLADAR追跡装置は、空間で安定化した画像を維持するように追跡対象の眼球の位置を常時調整するために追跡用検流計ミラーを用いている。
【0024】
虹彩96の回転位置98が変化する場合、眼球回旋を補償すべく、エキシマ走査ミラーにより生成される外科的パターンの回転を計算しかつ実行するために、その新しい位置が用いられる(ブロック117)。特徴認識、強膜血管検出96を用いて、または眼球90上にマーキングされた特徴について、ビデオ追跡を実施することができる。好ましくはこの測定は、眼の回転の変化速度の10倍の速度で更新される。
【0025】
所望のレーザー切除パターンの角膜上の位置を、エキシマビーム走査位置の場所に対してシフトさせるべき、ビデオ画像上で検知された眼球変化は、計算された変化に基づき、エキシマレーザー走査ミラーを介してレーザービームショットの誘導を動的に調整することによって補償される。
【0026】
当業者であれば、その他の実施形態および用途も本発明のために考慮可能であるということが分かるであろう。例えば、該眼球追跡装置監視システムおよび方法は、心理学および生理学的テストの利用分野といった現場を含め、外科的現場以外の環境でも使用可能である。
【0027】
前述の説明においては、簡潔さ、明確さそして理解を目的として特定の用語を使用してきたが、かかる用語は本明細書で記述を目的として使用され広義に解釈されるよう意図されていることから、先行技術の必要条件を超えていかなる不要な制限もそこから暗示されるべきものではない。その上、本明細書で例示され記述された装置の実施形態は例示を目的とするものであり、本発明の範囲は、正に同じ構造細部に制限されるものではない。
【0028】
ここで本発明、その好ましい実施形態の構造、操作および用途およびそれによって得られる有利な新しくかつ有用な結果について記述してきたが、当業者にとって明白な新しく有用な構造および適正な機械的均等物は、添付の特許請求の範囲内で記述されている。
【図面の簡単な説明】
【0029】
【図1】本発明のハイブリッド眼球追跡システムの概略図である。
【図2】本発明の低速運動追跡装置制御システムのフローチャートである。
【図3】システムにより監視されるパラメータを例示する眼球の概略図である。
【特許請求の範囲】
【請求項1】
外科的処置中における眼球変化を追跡する方法であって、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向かって、該眼球に安全な光ビームを誘導する段階と、
前記眼球からの反射光ビームを検出する段階と、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれるデータに基づいて複数の測定を実施する段階と、
少なくとも1つの幾何学的パラメータの変化を前記測定から計算する段階と、
からなる方法。
【請求項2】
前記幾何学的パラメータが、瞳孔径、眼球の角膜輪郭に対する瞳孔の位置および虹彩位置のうちの少なくとも1つを含んでなる請求項1に記載の方法。
【請求項3】
前記光ビームが、クラス1レーザーである請求項1に記載の方法。
【請求項4】
前記検出段階が、ビデオ監視を行う段階を含む請求項1に記載の方法。
【請求項5】
前記ビデオ監視段階が、250Hz未満の検出レートで実施される請求項4に記載の方法。
【請求項6】
前記計算段階が、眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定する段階を含む請求項1に記載の方法。
【請求項7】
前記眼球に対する矯正処置を実施する方法であって、
拡張および麻痺を達成すべく、実質的に未治療である眼球の角膜において、予め定められたパターンで複数の切除用レーザービームショットを誘導する段階と、
前記眼球に向かって該眼球に安全な光ビームを誘導すること、
前記眼球からの反射光ビームを検出すること、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれたデータに基づいて複数の測定を実施することおよび、
少なくとも1つの幾何学的パラメータ内の変化を該測定から計算すること、
によって眼球変化を追跡する段階と、
前記の計算された変化に基づいてレーザービームショットの誘導を動的に調整することにより眼球変化を補償する段階と、
からなる方法。
【請求項8】
前記検出段階が、ビデオ監視を行う段階を含む請求項7に記載の方法。
【請求項9】
前記ビデオ監視段階が、250Hz未満の検出レートで実施される請求項7に記載の方法。
【請求項10】
前記計算段階が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定する段階を含む請求項7に記載の方法。
【請求項11】
前記少なくとも1つの幾何学的パラメータが、前記眼の虹彩の回転である請求項7に記載の方法。
【請求項12】
前記調整段階が、虹彩の回転を補償すべく予め定められたパターンを回転させる段階を含む請求項11に記載の方法。
【請求項13】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩に対する該眼球の瞳孔の位置である請求項7に記載の方法。
【請求項14】
前記調整段階が、瞳孔の位置を補償すべく予め定められたパターンを並進運動させる段階を含む請求項13に記載の方法。
【請求項15】
前記眼球の瞳孔と虹彩との間の境界を用いて衝動性眼球運動を追跡する段階をさらに含んでなる請求項7に記載の方法。
【請求項16】
前記少なくとも1つの幾何学的パラメータが、眼球の瞳孔の直径である請求項15に記載の方法。
【請求項17】
前記調整段階、前記衝動性眼球運動の追跡のための入力を提供する段階を含む請求項16に記載の方法。
【請求項18】
実質的に一定に瞳孔径を維持するため、前記眼球の周囲の照明レベルを調整する段階をさらに含む請求項16に記載の方法。
【請求項19】
前記少なくとも1つの幾何学的パラメータが、前記眼球の角膜輪郭の位置である請求項15に記載の方法。
【請求項20】
前記調整段階が、前記衝動性眼球運動の追跡のための入力を提供する段階を含む請求項19に記載の方法。
【請求項21】
外科的処置中における眼球変化を追跡するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導するための手段と、
予め定められた周波数で前記眼球からの反射光ビームデータを収集するためのビデオ検出器と、
前記眼球の少なくとも1つの幾何学的パラメータにおける変化を、前記収集データから計算するための、プロセッサにインストール可能なソフトウェア手段と、
を含むシステム。
【請求項22】
前記幾何学的パラメータが、瞳孔径、眼球の角膜輪郭に対する該瞳孔の位置および虹彩位置のうちの少なくとも1つである請求項21に記載のシステム。
【請求項23】
前記光ビームが、クラス1レーザーである請求項21に記載のシステム。
【請求項24】
前記検出器が、ビデオモニタを行う請求項21に記載のシステム。
【請求項25】
前記ビデオモニタが、250Hz未満の検出レートでデータを収集するようになっている請求項24に記載のシステム。
【請求項26】
前記ソフトウェア手段が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定するようになっている請求項21に記載のシステム。
【請求項27】
眼球に対する矯正処置を実施するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球の角膜において予め定められたパターンで複数の切除用レーザービームショットを誘導するための手段と、
眼球変化を追跡するための手段であって、
前記眼球に向けて該眼球に安全な光ビームを誘導する手段と、
予め定められた周波数で前記眼球からの反射光ビームからデータを収集するビデオ検出器と、
前記眼球の少なくとも1つの幾何学的パラメータの変化を前記収集データから計算するプロセッサ上にインストール可能なソフトウェア手段と、
を備える手段と、
前記計算された変化に基づいて前記レーザービームショットの誘導を動的に調整することにより、眼球変化を補償する手段と、
を含んでなるシステム。
【請求項28】
前記検出器が、ビデオモニタである請求項27に記載のシステム。
【請求項29】
前記ビデオモニタが、250Hz未満の検出レートでデータを収集するようになっている請求項27に記載のシステム。
【請求項30】
前記ソフトウェア手段が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定するようになっている請求項27に記載のシステム。
【請求項31】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩の回転である請求項27に記載のシステム。
【請求項32】
前記調整手段は、虹彩の回転を補償すべく予め定められたパターンを回転させるための手段を含んでなる請求項31に記載のシステム。
【請求項33】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩に対する該眼球の瞳孔の位置である請求項27に記載のシステム。
【請求項34】
前記調整手段は、前記瞳孔の位置を補償すべく予め定められたパターンを並進運動させるための手段を含んでなる請求項33に記載のシステム。
【請求項35】
前記眼球の瞳孔と虹彩との間の境界を用いて衝動性眼球運動を追跡するための手段をさらに含んでなる請求項27に記載のシステム。
【請求項36】
前記少なくとも1つの幾何学的パラメータが、前記眼球の瞳孔の直径である請求項35に記載のシステム。
【請求項37】
前記調整手段が、前記衝動性眼球運動の追跡のための入力を提供するための手段を含む請求項36に記載のシステム。
【請求項38】
実質的に一定に瞳孔径を維持するため、前記眼球の周囲の照明レベルを調整するための手段をさらに含む請求項36に記載のシステム。
【請求項39】
前記少なくとも1つの幾何学的パラメータが、前記眼球の角膜輪郭の位置を含む請求項35に記載のシステム。
【請求項40】
前記調整手段が、前記衝動性眼球運動追跡のための入力を提供するための手段を含む請求項39に記載のシステム。
【請求項41】
外科的処置中における眼球変化を追跡する方法において、
拡張および麻痺を達成すべく実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導する段階と、
前記眼球からの反射光ビームを検出する段階と、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれたデータに基づいて複数の測定を実施する段階と、
前記少なくとも1つの幾何学的パラメータの変化を該測定から計算する段階と、
前記衝動性眼球運動を追跡する段階と、
衝動性眼球運動追跡を調整するための入力として、前記少なくとも1つの幾何学的パラメータの計算された変化を用いる段階と、
からなる方法。
【請求項42】
外科的処置中における眼球変化を追跡するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導するための手段と、
予め定められた周波数で前記眼球からの反射光ビームデータを収集するためのビデオ検出器と、
前記衝動性眼球運動追跡装置と、
前記眼球の前記少なくとも1つの幾何学的パラメータの変化を収集データから計算し、かつ前記衝動性眼球運動追跡装置を調整するための入力として、前記眼球の前記少なくとも1つの幾何学的パラメータにおける計算された変化を用いることができる、プロセッサにインストール可能なソフトウェア手段と、
を含むシステム。
【請求項43】
前記衝動性眼球運動追跡装置が、レーザーベースの眼球運動追跡装置である請求項42に記載のシステム。
【請求項1】
外科的処置中における眼球変化を追跡する方法であって、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向かって、該眼球に安全な光ビームを誘導する段階と、
前記眼球からの反射光ビームを検出する段階と、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれるデータに基づいて複数の測定を実施する段階と、
少なくとも1つの幾何学的パラメータの変化を前記測定から計算する段階と、
からなる方法。
【請求項2】
前記幾何学的パラメータが、瞳孔径、眼球の角膜輪郭に対する瞳孔の位置および虹彩位置のうちの少なくとも1つを含んでなる請求項1に記載の方法。
【請求項3】
前記光ビームが、クラス1レーザーである請求項1に記載の方法。
【請求項4】
前記検出段階が、ビデオ監視を行う段階を含む請求項1に記載の方法。
【請求項5】
前記ビデオ監視段階が、250Hz未満の検出レートで実施される請求項4に記載の方法。
【請求項6】
前記計算段階が、眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定する段階を含む請求項1に記載の方法。
【請求項7】
前記眼球に対する矯正処置を実施する方法であって、
拡張および麻痺を達成すべく、実質的に未治療である眼球の角膜において、予め定められたパターンで複数の切除用レーザービームショットを誘導する段階と、
前記眼球に向かって該眼球に安全な光ビームを誘導すること、
前記眼球からの反射光ビームを検出すること、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれたデータに基づいて複数の測定を実施することおよび、
少なくとも1つの幾何学的パラメータ内の変化を該測定から計算すること、
によって眼球変化を追跡する段階と、
前記の計算された変化に基づいてレーザービームショットの誘導を動的に調整することにより眼球変化を補償する段階と、
からなる方法。
【請求項8】
前記検出段階が、ビデオ監視を行う段階を含む請求項7に記載の方法。
【請求項9】
前記ビデオ監視段階が、250Hz未満の検出レートで実施される請求項7に記載の方法。
【請求項10】
前記計算段階が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定する段階を含む請求項7に記載の方法。
【請求項11】
前記少なくとも1つの幾何学的パラメータが、前記眼の虹彩の回転である請求項7に記載の方法。
【請求項12】
前記調整段階が、虹彩の回転を補償すべく予め定められたパターンを回転させる段階を含む請求項11に記載の方法。
【請求項13】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩に対する該眼球の瞳孔の位置である請求項7に記載の方法。
【請求項14】
前記調整段階が、瞳孔の位置を補償すべく予め定められたパターンを並進運動させる段階を含む請求項13に記載の方法。
【請求項15】
前記眼球の瞳孔と虹彩との間の境界を用いて衝動性眼球運動を追跡する段階をさらに含んでなる請求項7に記載の方法。
【請求項16】
前記少なくとも1つの幾何学的パラメータが、眼球の瞳孔の直径である請求項15に記載の方法。
【請求項17】
前記調整段階、前記衝動性眼球運動の追跡のための入力を提供する段階を含む請求項16に記載の方法。
【請求項18】
実質的に一定に瞳孔径を維持するため、前記眼球の周囲の照明レベルを調整する段階をさらに含む請求項16に記載の方法。
【請求項19】
前記少なくとも1つの幾何学的パラメータが、前記眼球の角膜輪郭の位置である請求項15に記載の方法。
【請求項20】
前記調整段階が、前記衝動性眼球運動の追跡のための入力を提供する段階を含む請求項19に記載の方法。
【請求項21】
外科的処置中における眼球変化を追跡するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導するための手段と、
予め定められた周波数で前記眼球からの反射光ビームデータを収集するためのビデオ検出器と、
前記眼球の少なくとも1つの幾何学的パラメータにおける変化を、前記収集データから計算するための、プロセッサにインストール可能なソフトウェア手段と、
を含むシステム。
【請求項22】
前記幾何学的パラメータが、瞳孔径、眼球の角膜輪郭に対する該瞳孔の位置および虹彩位置のうちの少なくとも1つである請求項21に記載のシステム。
【請求項23】
前記光ビームが、クラス1レーザーである請求項21に記載のシステム。
【請求項24】
前記検出器が、ビデオモニタを行う請求項21に記載のシステム。
【請求項25】
前記ビデオモニタが、250Hz未満の検出レートでデータを収集するようになっている請求項24に記載のシステム。
【請求項26】
前記ソフトウェア手段が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定するようになっている請求項21に記載のシステム。
【請求項27】
眼球に対する矯正処置を実施するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球の角膜において予め定められたパターンで複数の切除用レーザービームショットを誘導するための手段と、
眼球変化を追跡するための手段であって、
前記眼球に向けて該眼球に安全な光ビームを誘導する手段と、
予め定められた周波数で前記眼球からの反射光ビームからデータを収集するビデオ検出器と、
前記眼球の少なくとも1つの幾何学的パラメータの変化を前記収集データから計算するプロセッサ上にインストール可能なソフトウェア手段と、
を備える手段と、
前記計算された変化に基づいて前記レーザービームショットの誘導を動的に調整することにより、眼球変化を補償する手段と、
を含んでなるシステム。
【請求項28】
前記検出器が、ビデオモニタである請求項27に記載のシステム。
【請求項29】
前記ビデオモニタが、250Hz未満の検出レートでデータを収集するようになっている請求項27に記載のシステム。
【請求項30】
前記ソフトウェア手段が、前記眼球の構成要素の回旋および並進運動のうちの少なくとも1つを決定するようになっている請求項27に記載のシステム。
【請求項31】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩の回転である請求項27に記載のシステム。
【請求項32】
前記調整手段は、虹彩の回転を補償すべく予め定められたパターンを回転させるための手段を含んでなる請求項31に記載のシステム。
【請求項33】
前記少なくとも1つの幾何学的パラメータが、前記眼球の虹彩に対する該眼球の瞳孔の位置である請求項27に記載のシステム。
【請求項34】
前記調整手段は、前記瞳孔の位置を補償すべく予め定められたパターンを並進運動させるための手段を含んでなる請求項33に記載のシステム。
【請求項35】
前記眼球の瞳孔と虹彩との間の境界を用いて衝動性眼球運動を追跡するための手段をさらに含んでなる請求項27に記載のシステム。
【請求項36】
前記少なくとも1つの幾何学的パラメータが、前記眼球の瞳孔の直径である請求項35に記載のシステム。
【請求項37】
前記調整手段が、前記衝動性眼球運動の追跡のための入力を提供するための手段を含む請求項36に記載のシステム。
【請求項38】
実質的に一定に瞳孔径を維持するため、前記眼球の周囲の照明レベルを調整するための手段をさらに含む請求項36に記載のシステム。
【請求項39】
前記少なくとも1つの幾何学的パラメータが、前記眼球の角膜輪郭の位置を含む請求項35に記載のシステム。
【請求項40】
前記調整手段が、前記衝動性眼球運動追跡のための入力を提供するための手段を含む請求項39に記載のシステム。
【請求項41】
外科的処置中における眼球変化を追跡する方法において、
拡張および麻痺を達成すべく実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導する段階と、
前記眼球からの反射光ビームを検出する段階と、
予め定められた周波数で前記眼球の少なくとも1つの幾何学的パラメータについて前記反射光ビーム内に含まれたデータに基づいて複数の測定を実施する段階と、
前記少なくとも1つの幾何学的パラメータの変化を該測定から計算する段階と、
前記衝動性眼球運動を追跡する段階と、
衝動性眼球運動追跡を調整するための入力として、前記少なくとも1つの幾何学的パラメータの計算された変化を用いる段階と、
からなる方法。
【請求項42】
外科的処置中における眼球変化を追跡するためのシステムにおいて、
拡張および麻痺を達成すべく、実質的に未治療である眼球に向けて、該眼球に安全な光ビームを誘導するための手段と、
予め定められた周波数で前記眼球からの反射光ビームデータを収集するためのビデオ検出器と、
前記衝動性眼球運動追跡装置と、
前記眼球の前記少なくとも1つの幾何学的パラメータの変化を収集データから計算し、かつ前記衝動性眼球運動追跡装置を調整するための入力として、前記眼球の前記少なくとも1つの幾何学的パラメータにおける計算された変化を用いることができる、プロセッサにインストール可能なソフトウェア手段と、
を含むシステム。
【請求項43】
前記衝動性眼球運動追跡装置が、レーザーベースの眼球運動追跡装置である請求項42に記載のシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2007−516049(P2007−516049A)
【公表日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願番号】特願2006−547311(P2006−547311)
【出願日】平成16年12月23日(2004.12.23)
【国際出願番号】PCT/US2004/043130
【国際公開番号】WO2005/063154
【国際公開日】平成17年7月14日(2005.7.14)
【出願人】(504230051)アルコン リフラクティブホライズンズ,インコーポレイティド (12)
【Fターム(参考)】
【公表日】平成19年6月21日(2007.6.21)
【国際特許分類】
【出願日】平成16年12月23日(2004.12.23)
【国際出願番号】PCT/US2004/043130
【国際公開番号】WO2005/063154
【国際公開日】平成17年7月14日(2005.7.14)
【出願人】(504230051)アルコン リフラクティブホライズンズ,インコーポレイティド (12)
【Fターム(参考)】
[ Back to top ]