
ハイブリッド自動車およびその制御方法
【課題】シフトポジションがニュートラルポジションに設定された状態で運転者による操作がなされたときにハイブリッド自動車をより適正に制御する。
【解決手段】ハイブリッド自動車20では、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際にアクセル開度Accが閾値A2以上であることを含む条件が成立したときには、解除条件(ステップS3106,S3107)が成立するまで、アクセル開度Accに応じた要求トルクTrqと緩変化制約としての時定数τとに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定され(ステップS3108)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される。
【解決手段】ハイブリッド自動車20では、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際にアクセル開度Accが閾値A2以上であることを含む条件が成立したときには、解除条件(ステップS3106,S3107)が成立するまで、アクセル開度Accに応じた要求トルクTrqと緩変化制約としての時定数τとに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定され(ステップS3108)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド自動車およびその制御方法に関する。
【背景技術】
【0002】
従来から、ハイブリッド自動車として、車軸に遊星歯車機構を介して接続された内燃機関と、当該遊星歯車機構に接続された発電機と、2つの油圧式ブレーキを有する変速機を介して上記車軸に接続された電動機とを備えたものが知られている(例えば、特許文献1参照)。このハイブリッド自動車では、シフトポジションがニュートラルポジション(Nレンジ)であると共に発電機および電動機用のインバータがシャットダウンされているときに内燃機関の始動が指示された場合、車速が値0でない場合には車速が値0となるまで内燃機関の始動が禁止される。また、車速が値0である場合には、変速機の2つの油圧式のブレーキをオンすることで車軸の回転をロックすると共に発電機用のインバータのシャットダウンを解除し、発電機により内燃機関をクランキングして始動させる。このように、発電機により内燃機関をクランキングする際に車軸に作用する反力を変速機の油圧式のブレーキにより受け持つようにすれば、電動機からの出力が制限される場合であっても内燃機関の始動に伴うショックの発生を抑制することができる。
【特許文献1】特開2005−306238号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上述のようなハイブリッド自動車において、シフトポジションをニュートラルポジションに設定した状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだり、アクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジション(Dレンジ等)に切り替えたりすることも考えられる。しかしながら、上記特許文献には、これらの状況下でハイブリッド自動車をどのように制御するか何ら開示されてはない。
【0004】
そこで、本発明は、シフトポジションがニュートラルポジションに設定された状態で運転者による操作がなされたときに、ハイブリッド自動車をより適正に制御することを主目的とする。
【課題を解決するための手段】
【0005】
本発明によるハイブリッド自動車およびその制御方法は、上記主目的を達成するために以下の手段を採っている。
【0006】
本発明によるハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記取得されたアクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるものである。
【0007】
このハイブリッド自動車では、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、アクセル操作量に基づいて走行用の動力の目標値である目標駆動力が設定されると共に、当該目標駆動力に基づく走行用の動力が得られるように内燃機関と電動機とが制御される。また、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際に所定条件が成立する条件成立時には、所定の解除条件が成立するまで、取得されたアクセル操作量と所定の緩変化制約とに基づいて目標駆動力が通常時に比べて緩やかに変化するように設定されると共に、当該目標駆動力に基づく走行用の動力が得られるように内燃機関と電動機とが制御される。これにより、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。なお、所定の解除条件は、通常時と同様にして設定される目標駆動力と緩変化制約を用いて設定される目標駆動力との偏差がある程度近づいたときや、アクセルペダルが比較的大きく踏み増されるか、あるいは踏み戻されたとき等に成立するものとされてもよい。
【0008】
また、前記目標駆動力設定手段は、前記取得されたアクセル操作量に基づいて走行に要求される要求駆動力を設定すると共に、前記通常時には、前記設定された要求駆動力に基づいて走行用の動力の目標値である目標駆動力を設定し、前記条件成立時には、前記設定された要求駆動力と前記緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するものであってもよい。これにより、目標駆動力をより適正に緩変化させ、アクセルペダルが踏み込まれたままシフトポジションがニュートラルポジションから走行ポジションへと切り替えられたときのハイブリッド自動車の挙動をより安定化させることが可能となる。
【0009】
更に、前記目標駆動力設定手段は、前記通常時には、前記取得されたアクセル操作量を実行用アクセル操作量として設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定し、前記条件成立時には、前記取得されたアクセル操作量と前記緩変化制約とに基づいて前記実行用アクセル操作量を前記通常時に比べて緩やかに変化するように設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定するものであってもよい。このように、運転者によるアクセル操作量と緩変化制約とに基づいて実行用アクセル操作量を通常時に比べて緩やか変化させると共に、実行用アクセル操作量に基づいて目標駆動力を設定しても、当該目標駆動力をより適正に緩変化させることが可能となる。この場合、上記所定の解除条件は、通常時と同様にして設定される実行用アクセル操作量と緩変化制約を用いて設定される実行用アクセル操作量とがある程度近づいたときに成立するものとされてもよい。
【0010】
また、前記所定の緩変化制約は、時定数を用いたなまし処理により前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量を緩変化させる制約であってもよい。更に、前記所定の緩変化制約は、前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量の少なくとも増加側の許容変化量である上限レートを用いたレート処理により前記目標駆動力を緩変化させる制約であってもよい。
【0011】
本発明による他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるものである。
【0012】
このハイブリッド自動車では、基本的に運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力が設定されるが、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際にアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、ニュートラルポジションから走行ポジションへの切り替え時のアクセル操作量に応じた目標駆動力またはアクセル操作量の上限値を用いた上限制限処理を伴って目標駆動力が設定される。このように、ニュートラルポジションから走行ポジションへの切り替え時のアクセル操作量に応じた目標駆動力またはアクセル操作量の上限値を用いて目標駆動力を制限することで、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車が急発進あるいは急加速してしまうことを抑制することができる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。なお、所定の解除条件は、上限制限処理を実行した時間が所定時間に達したとき等に成立するものとされてもよい。
【0013】
また、前記ハイブリッド自動車は、駆動輪の空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、走行用の動力の前記挙動不安定状態を解消するための目標値である制限駆動力を設定する制限駆動力設定手段と、前記制限駆動力設定手段による前記制限駆動力の設定の解除を運転者に許容する制限駆動力設定解除手段とを更に備えてもよく、前記目標駆動力設定手段は、前記制限駆動力設定手段による前記制限駆動力の設定が解除されている場合には、前記所定条件の成立の有無に拘わらず前記通常時と同様に前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定するものであってもよい。すなわち、制限駆動力設定手段による制限駆動力の設定が解除された場合には、ハイブリッド自動車の挙動が多少不安定になることを運転者が容認しているとみなすことができる。従って、運転者により制限駆動力の設定が解除されている場合、上記所定条件が成立の有無に拘わらず、通常時と同様にアクセル操作量に基づいて目標駆動力が設定されるようにすれば、運転者の意図に即しながらハイブリッド自動車を比較的急峻に発進(加速)させることが可能となる。
【0014】
更に、前記ハイブリッド自動車は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段を更に備えてもよく、前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であってもよい。この場合、前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むものであってもよい。
【0015】
本発明による更に他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するニュートラル時制御手段と、
を備えるものである。
【0016】
このハイブリッド自動車では、シフトポジションがニュートラルポジションに設定されると共に内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となると、モータリング手段によるモータリングを伴って内燃機関が始動されるように内燃機関とモータリング手段とが制御される。これにより、このハイブリッド自動車では、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を内燃機関を始動させることで運転者に認識させると共に、内燃機関のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0017】
また、前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に該内燃機関が始動された後、前記取得されたアクセル操作量が所定の閾値未満である場合には、前記内燃機関が自立運転されるように該内燃機関を制御し、前記取得されたアクセル操作量が前記所定の閾値以上である場合には、前記内燃機関の回転数が前記取得されたアクセル操作量に応じた値となるように該内燃機関と前記モータリング手段とを制御するものであってもよい。これにより、シフトポジションがニュートラルポジションに設定された状態で内燃機関が始動された後に、当該内燃機関をより適正に作動させると共に、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を運転者により的確に認識させることが可能となる。
【0018】
更に、前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、所定の機関始動禁止条件が成立している場合には、前記内燃機関を始動させることなく、前記シフトポジションが前記ニュートラルポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するものであってもよい。これにより、シフトポジションがニュートラルポジションに設定されると共に内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、当該内燃機関を始動させることができない場合であっても、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を運転者に認識させることが可能となる。
【0019】
また、前記モータリング手段は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段であってもよく、前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であってもよい。この場合、前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むものであってもよい。
【0020】
本発明によるハイブリッド自動車の制御方法は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記アクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むものである。
【0021】
この方法によれば、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0022】
本発明による他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記アクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むものである。
【0023】
この方法によれば、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0024】
本発明による更に他のハイブリッド自動車の制御方法は、
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するステップ、
を含むものである。
【0025】
この方法によれば、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を内燃機関を始動させることで運転者に認識させると共に、内燃機関のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【発明を実施するための最良の形態】
【0026】
次に、本発明を実施するための最良の形態を実施例を用いて説明する。
【実施例】
【0027】
図1は、本発明の実施例に係るハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、エンジン22と、エンジン22のクランクシャフト(機関軸)26にダンパ28を介して接続された3軸式の動力分配統合機構30と、動力分配統合機構30に接続された発電可能なモータMG1と、動力分配統合機構30に接続された車軸としてのリングギヤ軸32aに取り付けられた減速ギヤ35と、この減速ギヤ35を介してリングギヤ軸32aに機械的に接続されたモータMG2と、摩擦制動力を出力可能な制動手段である電子制御式油圧ブレーキユニット(以下、単に「ブレーキユニット」という)90と、ハイブリッド自動車20の全体をコントロールするハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70等とを備えるものである。
【0028】
エンジン22は、ガソリンや軽油といった炭化水素系の燃料の供給を受けて動力を出力する内燃機関であり、エンジン用電子制御ユニット(以下、「エンジンECU」という)24により燃料噴射量や点火時期、吸入空気量等の制御を受けている。エンジンECU24には、エンジン22に対して設けられて当該エンジン22の運転状態を検出する各種センサからの信号が入力される。そして、エンジンECU24は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号や上記センサからの信号等に基づいてエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に出力する。
【0029】
動力分配統合機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行う遊星歯車機構として構成されている。機関側回転要素としてのキャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはモータMG1が、車軸側回転要素としてのリングギヤ32にはリングギヤ軸32aを介して減速ギヤ35がそれぞれ接続されており、動力分配統合機構30は、モータMG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側とにそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構37およびデファレンシャルギヤ38を介して最終的に駆動輪39a,39bに出力される。
【0030】
モータMG1およびMG2は、何れも発電機として作動すると共に電動機として作動可能な周知の同期発電電動機として構成されており、インバータ41,42を介して二次電池であるバッテリ50と電力のやり取りを行う。インバータ41,42とバッテリ50とを接続する電力ライン54は、各インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1,MG2の何れか一方により発電される電力を他方のモータで消費できるようになっている。従って、バッテリ50は、モータMG1,MG2の何れかから生じた電力や不足する電力により充放電されることになり、モータMG1,MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されないことになる。モータMG1,MG2は、何れもモータ用電子制御ユニット(以下、「モータECU」という)40により駆動制御されている。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力されており、モータECU40からは、インバータ41,42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいて図示しない回転数算出ルーチンを実行し、モータMG1,MG2の回転子の回転数Nm1,Nm2を計算している。更に、モータECU40は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号等に基づいてモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをハイブリッドECU70に出力する。
【0031】
バッテリ50は、バッテリ用電子制御ユニット(以下、「バッテリECU」という)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからのバッテリ電圧、バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流、バッテリ50に取り付けられた温度センサ51からのバッテリ温度Tb等が入力されている。バッテリECU52は、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッドECU70やエンジンECU24に出力する。更に、バッテリECU52は、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいて残容量SOCを算出したり、当該残容量SOCに基づいてバッテリ50の充放電要求パワーPb*を算出したり、残容量SOCと電池温度Tbとに基づいてバッテリ50の充電に許容される電力である充電許容電力としての入力制限Winとバッテリ50の放電に許容される電力である放電許容電力としての出力制限Woutとを算出したりする。なお、バッテリ50の入出力制限Win,Woutは、バッテリ温度Tbに基づいて入出力制限Win,Woutの基本値を設定すると共に、バッテリ50の残容量SOCに基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定可能である。
【0032】
ブレーキユニット90は、マスタシリンダ91や流体圧式(油圧式)のブレーキアクチュエータ92、駆動輪39a,39bや図示しない転動輪に対して設けられ、各車輪に取り付けられたブレーキディスクを挟持して対応する車輪に摩擦制動力を付与可能なブレーキパッドを駆動するホイールシリンダ93a〜93d、ホイールシリンダ93a〜93dごとに設けられて対応するホイールシリンダの油圧(ホイールシリンダ圧)を検出する図示しないホイールシリンダ圧センサ、ブレーキアクチュエータ92を制御するブレーキ用電子制御ユニット(以下、「ブレーキECU」という)95等を含む。ブレーキアクチュエータ92は、図示しない油圧発生源としてのポンプやアキュムレータ、マスタシリンダ91とホイールシリンダ93a〜93dとの連通状態を制御するマスタシリンダカットソレノイドバルブ、ブレーキペダル85の踏み込み量に応じてペダル踏力に対する反力を創出するストロークシミュレータ等を有する。また、ブレーキECU95は、図示しない信号ラインを介して、マスタシリンダ圧を検出する図示しないマスタシリンダ圧センサからのマスタシリンダ圧や、ホイールシリンダ圧センサからのホイールシリンダ圧、駆動輪39a,39bの車輪速を検出する車輪速センサ89a,89bや図示しない転動輪の車輪速を検出する車輪速センサ89c,89dからの車輪速、図示しない操舵角センサからの操舵角等を入力すると共に、ハイブリッドECU70等との間で通信により各種信号のやり取りを行う。そして、ブレーキECU95は、ブレーキペダル85の踏み込み量を示すブレーキペダルストロークBSや車速V等に基づいてハイブリッド自動車20に作用させるべき制動トルクのうちのブレーキユニット90による分担分に応じた摩擦制動トルクが駆動輪39a,39bや転動輪に作用するようにブレーキアクチュエータ92を制御する。また、ブレーキECU95は、運転者によるブレーキペダル85の踏み込み操作とは無関係に、駆動輪39a,39bや転動輪に制動用のトルクが作用するようブレーキアクチュエータ92を制御することもできる。
【0033】
更に、ブレーキECU95は、駆動輪の空転や車両が横滑りした際の安定性を確保すべく、各種入力信号に基づいていわゆるアンチロック制御(ABS)や駆動輪39a,39bの何れかが空転によりスリップするのを抑制するトラクションコントロール(TRC)、旋回走行時にハイブリッド自動車20の姿勢を安定に保持する車両安定化制御(VSC)等をも実行可能である。ここで、実施例のブレーキECU95は、これらのVSC等を実行するに際して、ブレーキアクチュエータ92等を個別に制御する代わりに、ブレーキアクチュエータ92の制御と駆動力制御とステアリング制御とを統合した車両運動統合制御(VDIM:Vehicle Dynamics Integrated Management)を実行する。例えば、ブレーキECU95は、トラクションコントロール(TRC)の実行に際して、駆動輪39a,39bの車輪速を車体速に換算したものと推定車体速との偏差であるスリップ速度が比較的低い所定速度(例えば、1〜5km/h)以上となっている駆動輪にスリップが生じていると判定し、スリップを生じていると判定された駆動輪39a,39bにスリップ速度が大きいほど大きな制動トルクが付与されるようブレーキアクチュエータ92を制御したり、主にモータMG2からのトルク出力が制限されるようにしてスリップ状態のような挙動不安定状態を解消するためにリングギヤ軸32aに出力すべきトルクである制限トルク(制限駆動力)TlimをハイブリッドECU70を出力したりする。また、実施例のブレーキECU95には、運転に長けた運転者の中には車両側からの運転支援を好まない者もいることを踏まえて、ブレーキECU95によるTRC等の車両運動統合制御を解除可能とするVDIM解除スイッチ88が接続されている。運転者によりVDIM解除スイッチ88が操作されて車両運動統合制御が解除されると、ブレーキECU95は、通常時には値0に設定される所定のVDIM解除フラグFvcanを値1に設定すると共に、車両運動統合制御を実行することなく更に車両運動統合制御の実行の有無を示す所定のVDIMフラグFvdimを値0に設定する。これに対して、運転者によりVDIM解除スイッチ88を介して車両運動統合制御が解除されていない場合、ブレーキECU95は、上記VDIM解除フラグFvcanを値0に設定する。更に、ブレーキECU95は、VDIM解除スイッチ88を介して車両運動統合制御が解除されていないときに車両運動統合制御を実行すべき場合には、上記VDIMフラグFvdimを値1に設定すると共に、何れも図示しないGセンサやヨーレートセンサ等からの信号に基づいて目標車両挙動や実際の車両状態量を演算し、演算した目標車両挙動と車両状態量とに基づいてブレーキアクチュエータ92への指令値や、ハイブリッドECU70への制限トルク(制限駆動力)Tlim、操舵ECUへの操舵補正量等を設定する。なお、実施例において、ブレーキECU95は、運転者によりVDIM解除スイッチ88を介して車両運動統合制御が解除されていないときであっても車両運動統合制御を実行する必要がない場合には、車両運動統合制御を実行することなくVDIMフラグFvdimを値0に設定する。
【0034】
ハイブリッドECU70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74、データを一時的に記憶するRAM76、計時指令に応じて計時処理を実行するタイマ78、図示しない入出力ポートおよび通信ポート等を備える。ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置であるシフトポジションSPを検出するシフトポジションセンサ82からのシフトポジションSP、運転者によるアクセル操作量であるアクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速Vを取得する車速センサ87からの車速V、車輪速センサ89a〜89dからの車輪速等が入力ポートを介して入力される。そして、ハイブリッドECU70は、上述したように、エンジンECU24やモータECU40、バッテリECU52、ブレーキECU95等と通信ポートを介して接続されており、エンジンECU24やモータECU40、バッテリECU52、ブレーキECU95等と各種制御信号やデータのやり取りを行う。なお、実施例のハイブリッド自動車20では、シフトレバー81のシフトポジションSPとして、駐車時に用いる駐車ポジション(Pポジション)、後進走行用のリバースポジション(Rポジション)、基本的にエンジン22が停止されると共にインバータ41,42がシャットダウンされる(すべてのスイッチング素子がオフされる)ニュートラルポジション(Nポジション)、通常の前進走行用のドライブポジション(Dポジション)、所定条件下でアクセルオフとなったときにDポジション選択時に比べて大きな制動力が得られるようにするブレーキポジション(Bポジション)等が用意されている。
【0035】
上述のように構成された実施例のハイブリッド自動車20では、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて車軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*が計算され、この目標トルクT*に基づくトルクがリングギヤ軸32aに出力されるようにエンジン22とモータMG1とモータMG2とが制御される。エンジン22とモータMG1とモータMG2の運転制御モードとしては、目標トルクT*に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されてリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御するトルク変換運転モードや、目標トルクT*とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って目標トルクT*に応じたトルクがリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2から目標トルクT*に見合う動力をリングギヤ軸32aに出力するように運転制御するモータ運転モード等がある。
【0036】
次に、上述のように構成されたハイブリッド自動車20の動作、特に運転者によりシフトポジションSPとしてニュートラルポジション(以下「Nポジション」という)が設定されているときの動作について説明する。図2は、ハイブリッド自動車20が停車した状態で運転者によりシフトポジションSPがNポジションに設定されているときにハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行されるNポジション時制御ルーチンの一例を示すフローチャートである。なお、ハイブリッド自動車20において、シフトポジションSPがNポジションに設定されると、基本的にエンジン22が停止されると共にインバータ41,42がシャットダウンされるのは上述のとおりである。
【0037】
図2のNポジション時制御ルーチンの開始に際して、ハイブリッドECU70のCPU72は、シフトポジションセンサ82からのシフトポジションSPやアクセルペダルポジションセンサ84からのアクセル開度Acc、モータMG1,MG2の回転数Nm1,Nm2、エンジン22の回転数Ne、充電フラグFchgの値、エンジン始動禁止フラグFsdの値、エンジン運転フラグFegの値といった制御に必要なデータの入力処理を実行する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2はモータECU40から通信により入力するものとし、エンジン22の回転数Neはクランクシャフト26に取り付けられた図示しないクランクポジションセンサからの信号に基づいて計算された値をエンジンECU24から通信により入力するものとした。また、充電フラグFchgは、バッテリECU52により通常時に値0に設定されると共に残容量SOC等に基づいてバッテリ50を強制的に充電すべきときに値1に設定されるものであり、バッテリECU52から通信により入力する。更に、エンジン始動禁止フラグFsdは、エンジンECU24やバッテリECU52により設定されたものを通信により入力するものとした。実施例において、エンジン始動禁止フラグFsdは、エンジンECU24によりエンジン22の状態を示す各種パラメータに基づいてエンジン22の始動(作動)を許容し得るときに値0に設定されると共に例えば冷却水温等が過剰に高まっている場合のようなエンジン22を始動(作動)させるべきではないと判断される場合に値1に設定される。また、エンジン始動禁止フラグFsdは、バッテリECU52により残容量SOCや入出力制限Win,Wout等に基づいてエンジン22の始動(作動)を許容し得るときに値0に設定されると共に、例えば残容量SOCが極めて少ない場合のようなエンジン22を始動(作動)させるべきではないと判断される場合に値1に設定される。そして、エンジン運転フラグFegは、実施例では、エンジンECU24によりエンジン22の運転が停止されているときに値0に設定されると共にエンジン22が運転されているときに値1に設定されるものであり、エンジンECU24から通信により入力する。
【0038】
ステップS100のデータ入力処理の後、入力したシフトポジションSPがNポジションであるか否かを判定し(ステップS110)、シフトポジションがNポジションであれば、充電フラグFchgが値0であるか否かを判定する(ステップS120)。また、充電フラグFchgが値0であってバッテリ50を強制的に充電する必要がない場合には、エンジン運転フラグFegが値0であるか否かを判定し(ステップS130)、エンジン運転フラグFegが値0であってエンジン22の運転が停止されている場合には、エンジン22の始動処理が実行される間に値1に設定されるフラグF0が値0であるか否かを判定する(ステップS140)。更に、フラグF0が値0であってエンジン22の始動処理が実行されていない場合には、ステップS100にて入力したアクセル開度Accが予め定められた閾値A0以上であるか否かを判定する(ステップS150)。実施例では、閾値A0として、アクセルペダル83の不感帯等を考慮した値0に比較的近い正の値が用いられ、アクセル開度Accが閾値A0未満であって運転者によりアクセルペダル83が踏み込まれていないとみなされる場合には、再度ステップS100以降の処理を実行する。
【0039】
また、ステップS150にてアクセル開度Accが閾値A0以上であると判断された場合には、エンジン始動禁止フラグFsdが値0であるか否かを判定する(ステップS160)。そして、エンジン始動禁止フラグFsdが値0であってエンジン22の始動が禁止されていない場合には、モータECU40にインバータ41および42のシャットダウンを解除させるためのインバータシャットダウン解除指令を送信すると共に(ステップS170)、上記フラグF0を値1に設定した上で(ステップS180)、エンジン始動処理(ステップS190)を開始し、再度ステップS100以降の処理を実行する。こうしてエンジン始動処理が開始されると、シフトポジションSPがNポジションに保たれていれば、基本的にステップS140にて否定判断がなされ、ステップS190の処理が実行されることになる。ステップS190のエンジン始動処理は、所定のマップに従ってエンジン22をクランキングするようにモータMG1のトルク指令を設定すると共に、エンジン22のクランキングに伴ってリングギヤ軸32aに作用するトルクをキャンセルしてリングギヤ軸32aの回転数が値0になるように(ハイブリッド自動車20の停車状態が維持されるように)モータMG2のトルク指令を設定する処理である。また、ステップS190では、エンジン22のクランキングが開始された後の所定のタイミングで燃料噴射制御や点火制御が開始されるようにエンジン22に指令信号が送信される。そして、エンジン22が完爆に至ると、ステップS190のエンジン始動処理が完了し、ハイブリッドECU70によりフラグF0が値0に設定されると共に、エンジンECU24によりエンジン運転フラグFegが値1に設定される。このように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上になると、駆動軸としてのリングギヤ軸32aに走行用のトルクが出力されないようにすると共にモータMG1によるクランキング(モータリング)を伴ってエンジン22が始動されるようにエンジン22とモータMG1およびMG2が制御される。すなわち、ハイブリッド自動車20では、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨をエンジン22を始動させることで運転者に認識させると共に、エンジンのみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。なお、エンジン22の始動が完了すると、エンジン22は、実質的にトルクを出力することなく所定回転数(例えばアイドル時の回転数)で自立運転される。
【0040】
一方、ステップS150にてアクセル開度Accが閾値A0以上であると判断された後、エンジン始動禁止フラグFsdが値1であってエンジン22の始動が禁止されていると判断された場合には、インストルメントパネルに設けられた所定の表示部あるいはナビゲーションシステムの表示画面に「Nポジションでアクセルが踏み込まれています」といったような警告メッセージを表示させるべく、これら表示部の表示制御を行うメータECUに指令信号を送信し(ステップS200)、再度ステップS100以降の処理を実行する。このように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となったときにエンジン22の始動が禁止されている場合には、エンジン22を始動させることなく、所定の表示部にシフトポジションSPがNポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するための警告メッセージが表示されることになる。なお、ステップS200では、上述のような警告メッセージを表示部に表示させる代わりに、インストルメントパネル上等に設けられた所定の警告ランプを点灯あるいは点滅させてもよく、音声等による警告がなされてもよい。
【0041】
また、上述のエンジン始動処理(ステップS190)が実行されてエンジン22が始動された場合、シフトポジションSPがNポジションに保たれていれば、基本的にステップS130にて否定判断がなされ、ステップS100にて入力したアクセル開度Accが予め定められた閾値A1以上であるか否か判定される(ステップS210)。実施例では、閾値A1として、上述の値A0よりも大きい正の値が用いられるが、閾値A1として上述の値A0が用いられてもよい。そして、ステップS210にてアクセル開度Accが閾値A1以上であると判断された場合には、ステップS100にて入力したアクセル開度Accに基づいてエンジン22の目標回転数Ne*を設定する(ステップS220)。実施例では、アクセル開度AccとNポジション選択時におけるエンジン22の目標回転数Ne*との関係が予め定められて図示しない目標エンジン回転数設定用マップとしてROM74に記憶されており、ステップS220では、与えられたアクセル開度Accに対応した目標回転数Ne*が当該マップから導出・設定される。次いで、ステップS220にて設定した目標回転数Ne*とステップS100にて入力したエンジン22の回転数Neとを用いて次式(1)に従いモータMG1のトルク指令Tm1*を設定すると共に、設定したトルク指令Tm1*と動力分配統合機構30のギヤ比ρと減速ギヤ35のギヤ比Grとを用いて次式(2)に従いモータMG2のトルク指令Tm2*を設定する(ステップS230)。ここで、ここで、式(1)は、燃料カットされた状態のエンジン22をモータMG1により強制的にモータリングして回転数Neを目標回転数Ne*に一致させるためのフィードバック制御における関係式であり、式(1)中、右辺第1項の「k10」は比例項のゲインであり、右辺第2項の「k20」は積分項のゲインである。また、式(2)は、モータMG1によるエンジン22のモータリングに伴ってリングギヤ軸32aに作用するトルクをキャンセルしてリングギヤ軸32aの回転数を値0にするため(ハイブリッド自動車20の停車状態を維持するため)の関係式である。
【0042】
Tm1* = k10・(Ne*-Ne)+k20・∫(Ne*-Ne)dt …(1)
Tm2* = Tm1*/ρ/Gr …(2)
【0043】
こうしてモータMG1およびMG2のトルク指令Tm1*およびTm2*を設定したならば、エンジンECU24に対してエンジン22に対する燃料噴射を停止させるべく燃料カット指令を送信すると共に、モータMG1,MG2のトルク指令Tm1*,Tm2*をモータECU40に送信し(ステップS240)、再度ステップS100以降の処理を実行する。トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。これにより、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定された状態でステップS190のエンジン始動処理を経てエンジン22が始動された後、運転者によりアクセルペダル83が踏み込まれてアクセル開度Accが閾値A1以上となる場合には、駆動軸としてのリングギヤ軸32aに走行用のトルクが出力されないようにすると共にエンジン22の回転数Neがアクセル操作量Accに応じた目標回転数Ne*となるようにエンジン22とモータMG1およびMG2とが制御されることになる。これに対して、ステップS210にてアクセル開度Accが上記閾値A1未満であると判断された場合には、エンジンECU24に対してエンジン22が自立運転されるようにするための自立運転指令を送信し(ステップS250)、再度ステップS100以降の処理を実行する。これにより、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定された状態でステップS190のエンジン始動処理を経てエンジン22が始動された後、運転者によるアクセル開度Accが閾値A1未満となる場合、すなわち運転者によりアクセルペダル83が実質的に踏み込まれていない場合には、エンジン22が実質的にトルクを出力しないように自立運転されることになる。
【0044】
なお、図2のNポジション時制御ルーチンが実行されている最中に、ステップS120にて充電フラグFchgが値1であってバッテリ50を強制的に充電すべきと判断された場合には、所定のバッテリ充電処理(ステップS260)が実行されることになる。かかるバッテリ充電処理は、ステップS190と同様の処理によりエンジン22を始動させた後、エンジン22からの動力のすべてを用いて発電するようにモータMG1のトルク指令を設定すると共に、モータMG1の発電に伴ってリングギヤ軸32aに作用するトルクをキャンセルしてハイブリッド自動車20の停車状態が維持されるようにモータMG2のトルク指令を設定する処理である。また、図2のNポジション時制御ルーチンは、ステップS110にてシフトポジションSPが例えばDポジションといったNポジション以外の走行ポジションであると判断されると終了し、その後、例えばDポジションに対応した処理が実行されることになる。
【0045】
ここまで説明したように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となると、モータMG1によるモータリングを伴ってエンジン22が始動されるようにエンジン22とモータMG1およびMG2とが制御される(ステップS150〜S190)。これにより、このハイブリッド自動車では、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨をエンジン22を始動させることで運転者に認識させると共に、エンジン22のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、実施例では、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。
【0046】
また、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に当該エンジン22が始動された後、運転者によるアクセル開度Accが閾値A1以上である場合には、エンジン22の回転数が取得されたアクセル開度Accに応じた目標回転数Ne*となるようにエンジン22とモータMG1およびMG2とが制御される(ステップS220〜S240)。更に、エンジン22が始動された後、運転者によるアクセル開度Accが閾値A1未満である場合には、エンジン22が自立運転されるように当該エンジン22が制御される(ステップS250)。これにより、シフトポジションSPがNポジションに設定された状態でエンジン22が始動された後に、当該エンジン22をより適正に作動させると共に、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨を運転者により的確に認識させることが可能となる。
【0047】
加えて、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中にアクセル開度Accが閾値A0以上となったときに、エンジン始動禁止フラグFsdが値0に設定されている(機関始動禁止条件が成立している)場合には、エンジン22が始動されず、シフトポジションSPがNポジションに設定された状態でアクセル操作がなされている旨の警告メッセージが所定の表示部に表示される(ステップS200)。これにより、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となったときにエンジン22を始動させることができない場合であっても、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨を運転者に認識させることが可能となる。
【0048】
引き続き、図3から図7を参照しながら、シフトポジションSPがNポジションからDポジション(走行ポジション)に切り替えられたときのハイブリッド自動車20の動作について説明する。図3は、運転者によりシフトポジションSPとしてDポジションが設定されているときにハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行される駆動制御ルーチンの一例を示すフローチャートである。
【0049】
図3の駆動制御ルーチンの開始に際して、ハイブリッドECU70のCPU72は、前回のシフトポジションSPや、アクセルペダルポジションセンサ84からのアクセル開度Acc、車速センサ87からの車速V、モータECU40からのモータMG1,MG2の回転数Nm1,Nm2、バッテリ50の充放電要求パワーPb*や出力制限Wout、ブレーキECU95からのVDIM解除フラグFvcanの値、VDIMフラグFvdimの値および制限トルクTlimといった制御に必要なデータの入力処理を実行する(ステップS300)。ここで、前回のシフトポジションSPは、ステップS300の処理の実行前におけるシフトポジションSPでありハイブリッドECU70の所定の記憶領域に格納されているものである。また、充放電要求パワーPb*やバッテリ50の入出力制限Win,Woutは、バッテリECU52から通信により入力するものとした。
【0050】
ステップS300のデータ入力処理の後、運転者によるアクセル開度Accや車速V等に基づいて駆動軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*を設定する(ステップS310)。ステップS310における目標トルクT*の設定処理の詳細を図4に示す。同図に示すように、目標トルクT*の設定に際しては、まずステップS300にて入力したアクセル開度Accと車速Vとに基づいて走行に要求される要求トルクTrqを設定する(ステップS3100)。実施例では、アクセル開度Accと車速Vと要求トルクTrqとの関係が予め定められて要求トルク設定用マップとしてROM74に記憶されており、要求トルクTrqとしては、与えられたアクセル開度Accと車速Vとに対応したものが当該マップから導出・設定される。図5に要求トルク設定用マップの一例を示す。次いで、VDIM解除フラグFvcanが値0であるか否か、すなわちVDIM解除スイッチ88を介して車両運動統合制御が解除されていないかどうかを判定し(ステップS3101)、VDIM解除フラグFvcanが値0であって車両運動統合制御が解除されていない場合には、通常時には値0に設定される所定のフラグF1が値0であるか否かを判定する(ステップS3102)。また、フラグF1が値0であれば、ステップS300にて入力した前回のシフトポジションSPがNポジションであるか否かを判定し(ステップS3103)、前回シフトポジションSPがNポジションではなくDポジションであれば(通常時であれば)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。また、ステップS3103にて例えばハイブリッド自動車20が停車しているときに運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられて本ルーチンが開始されたときのように前回のシフトポジションSPがNポジションであると判断された場合には、ステップS300にて入力したアクセル開度AccすなわちNポジションからDポジションへの切り替え時におけるアクセル開度Accが予め定められた閾値A2以上であるか否かを判定する(ステップS3104)。実施例では、閾値A2として例えば50〜60%といった比較的大きい正の値が用いられ、NポジションからDポジションへの切り替え時におけるアクセル開度Accが閾値A2未満であれば(通常時であれば)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。
【0051】
一方、ステップS3104にてアクセル開度Accが閾値A2以上であると判断された場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断された場合には、上記フラグF1を値1に設定すると共にステップS300にて入力したアクセル開度AccすなわちNポジションからDポジションへの切り替え時におけるアクセル開度Accに基づいて時定数τを設定する(ステップS3105)。時定数τは、値0〜値1の範囲内の値であり、実施例では、NポジションからDポジションへの切り替え時におけるアクセル開度Accと時定数τとの関係が予め実験・解析を経て図示しない時定数設定用マップとしてROM74に記憶されており、与えられたアクセル開度Accに対応したものが時定数τとして当該マップから導出・設定される。続いて、例えばステップS300にて入力したアクセル開度Accと前回のアクセル開度Accとの偏差を上限側および下限側の閾値と比較することにより、運転者によってアクセルペダル83が比較的大きく踏み増されたか、あるいは踏み戻されたか否かを判定し(ステップS3106)、アクセルペダル83の比較的大きな踏み増しまたは踏み戻しがなければ、ステップS3100にて設定した要求トルクTrqから前回の目標トルクT*(本ルーチンの初回実行時には値0)を減じた値であるトルク偏差が所定の閾値T0以下であるか否かを判定する(ステップS3107)。そして、当該トルク偏差が閾値T0を上回っている場合には、ステップS3100にて設定した要求トルクTrqと前回の目標トルクT*とステップS3105にて設定した時定数τとを用いた次式(3)に従うなまし処理を実行して目標トルクT*を設定する(ステップS3108)。これにより、実施例のハイブリッド自動車20では、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれている場合には、アクセルペダル83の比較的大きな踏み増しまたは踏み戻しがなく、かつ要求トルクTrqと前回の目標トルクT*との差が比較的大きい間、ステップS3110にて目標トルクT*が設定される通常時に比べて緩やかに変化するように目標トルクT*が設定されることになる。
【0052】
T* = τ・前回T* + (1-τ)・Trq …(3)
【0053】
上述のようにして、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断されてフラグF1が値1に設定されると、図3の駆動制御ルーチンの次回実行以降、ステップS3102にて否定判断がなされ、この場合には、ステップS3103〜S3105の処理がスキップされ、ステップS3106以降の処理が実行される。また、ステップS3108のなまし処理による目標トルクT*の設定が実行されるようになった後、ステップS3106にて運転者によりアクセルペダル83が比較的大きく踏み増されたか、あるいは踏み戻されたと判断された場合には、フラグF1を値0に設定した上で(ステップS3109)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。更に、ステップS3108のなまし処理による目標トルクT*の設定が実行されるようになった後、要求トルクTrqから前回の目標トルクT*を減じた値であるトルク偏差が閾値T0以下となった場合には、フラグF1を値0に設定した上で(ステップS3109)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。加えて、ステップS3101にてVDIM解除フラグFvcanが値1であって車両運動統合制御が解除されていると判断された場合には、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。すなわち、運転者により車両運動統合制御が解除されている場合には、仮にNポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていたとしても、ステップS3100にて設定した要求トルクTrqが目標トルクT*として設定されることになる。
【0054】
さて、上述のようにして目標トルクT*を設定したならば、図3に示すように、VDIMフラグFvdimが値1であるか否かを判定する(ステップS320)。VDIMフラグFvdimが値1である場合には、ステップS300にてブレーキECU95により設定された制限トルクTlimを入力していることから、この場合には、ステップS310にて設定した目標トルクT*と制限トルクTlimとの小さい方を目標トルクT*として再設定する(ステップS330)。また、ステップS320にてVDIMフラグFvdimが値0であると判断された場合、ステップS330の処理はスキップされる。次いで、車両全体に要求される要求パワーP*を設定する(ステップS340)。実施例において、要求パワーP*は、目標トルクT*にリングギヤ軸32aの回転数Nrを乗じたものと充放電要求パワーPb*とロスLossとの総和として計算される。なお、リングギヤ軸32aの回転数Nrは、図示するようにモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除するか、あるいは車速Vに換算係数kを乗じることによっても得ることができる。要求パワーP*を設定したならば、エンジン22が運転されているか否か判定する(ステップS350)。そして、例えばシフトポジションSPがNポジションに設定されている最中にアクセル操作がなされてエンジン22が始動された場合のように、エンジン22が運転されている場合には、ステップS340にて設定した要求パワーP*が予め定められた閾値Pref未満であるか否かを判定する(ステップS360)。ステップS360にて要求パワーP*が閾値Pref未満であると判断された場合には、エンジンECU24に対してエンジン22が実質的にトルクを出力することなく所定回転数で自立運転されるようにするための自立運転指令を送信した上で(ステップS370)、モータMG1に対するトルク指令Tm1*を値0に設定する(ステップS380)。
【0055】
次いで、バッテリ50の出力制限Woutと、設定したモータMG1のトルク指令Tm1*と現在のモータMG1の回転数Nm1との積として得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で除することによりモータMG2から出力してもよいトルクの上限としてのトルク制限Tmaxを次式(4)に従い計算する(ステップS390)。更に、目標トルクT*とトルク指令Tm1*と動力分配統合機構30のギヤ比ρと減速ギヤ35のギヤ比Grとを用いてモータMG2から出力すべきトルクとしての仮モータトルクTm2tmpを次式(5)に従い計算し(ステップS400)、仮モータトルクTm2tmpをステップS390にて計算したトルク制限Tmaxで制限した値をモータMG2のトルク指令Tm2*として設定する(ステップS410)。このようにしてモータMG2のトルク指令Tm2*を設定することにより、車軸としてのリングギヤ軸32aに出力するトルクをバッテリ50の出力制限Woutの範囲内に制限した値に設定することができる。こうしてモータMG1およびMG2のトルク指令Tm1*およびTm2*を設定したならば、トルク指令Tm1*,Tm2*をモータECU40に送信し(ステップS420)、再度ステップS300以降の処理を実行する。トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。なお、式(5)は、図6に例示する動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図から容易に導出することができる。図6において、左側のS軸はモータMG1の回転数Nm1に一致するサンギヤ31の回転数を示し、中央のC軸はエンジン22の回転数Neに一致するキャリア34の回転数を示し、右側のR軸はモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除したリングギヤ32の回転数Nrを示す。また、R軸上の2つの太線矢印は、モータMG1からトルクTm1を出力したときにこのトルク出力によりリングギヤ軸32aに作用するトルクと、モータMG2から出力されるトルクTm2が減速ギヤ35を介してリングギヤ軸32aに作用するトルクとを示す。
【0056】
Tmax = (Wout-Tm1*・Nm1)/Nm2 …(4)
Tm2tmp = (Tr*+Tm1*/ρ)/Gr …(5)
【0057】
また、ステップS360にて要求パワーP*が閾値Pref以上であると判断された場合には、要求パワーP*をエンジン22に出力させるべく要求パワーP*に基づいてエンジン22の目標回転数Ne*と目標トルクTe*とを設定し、設定した目標回転数Ne*と目標トルクTe*とをエンジンECU24に送信する(ステップS430)。実施例では、予め定められたエンジン22を効率よく作動させるための動作ラインと要求パワーP*とに基づいてエンジン22の目標回転数Ne*と目標トルクTe*とを設定するものとした。図7に、エンジン22の動作ラインと目標回転数Ne*と目標トルクTe*との相関曲線とを例示する。同図に示すように、目標回転数Ne*と目標トルクTe*は、動作ラインと要求パワーP*(Ne*×Te*)が一定となることを示す相関曲線との交点から求めることができる。こうしてエンジン22の目標回転数Ne*と目標トルクTe*とを設定したならば、ステップS430にて設定した目標回転数Ne*とリングギヤ軸32aの回転数Nr(Nm2/Gr)と動力分配統合機構30のギヤ比ρ(サンギヤ31の歯数/リングギヤ32の歯数)とを用いて次式(6)に従いモータMG1の目標回転数Nm1*を計算した上で、計算した目標回転数Nm1*と現在の回転数Nm1とに基づく次式(7)の計算を実行してモータMG1のトルク指令Tm1*を設定する(ステップS440)。モータMG1の目標回転数Nm1*を求めるための式(6)は、図6の共線図における回転数の関係を用いれば容易に導出することができる。また、式(7)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(7)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。こうしてモータMG1のトルク指令Tm1*を設定したならば、上述のステップS390からS420の処理を実行した上で、再度ステップS300以降の処理を実行する。一方、ステップS350にてエンジン22の運転が停止されていると判断された場合には、ステップS380にてモータMG1のトルク指令Tm1*を値0に設定した上で、上述のステップS390からS420の処理を実行し、再度ステップS300以降の処理を実行する。
【0058】
Nm1* = Ne*・(1+ρ)/ρ-Nm2/(Gr・ρ) …(6)
Tm1* = -ρ/(1+ρ)・Te*+k1・(Nm1*-Nm1)+k2・∫(Nm1*-Nm1)dt …(7)
【0059】
ここまで説明したように、実施例のハイブリッド自動車20では、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際に運転者によるアクセル開度Accが閾値A2以上であることを含む条件が成立しない通常時には、アクセル開度Accに基づいて駆動軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*が設定されると共に(図3のステップS310、図4のステップS3100,S3110)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される(図3のS320〜S440)。また、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際に上記条件が成立したときには、所定の解除条件(図4のステップS3106,S3107)が成立するまで、アクセル開度Accに応じた要求トルクTrqと緩変化制約としての時定数τおよび上記式(3)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定されると共に(図4のステップS3108)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される(図3のS320〜S440)。これにより、シフトポジションSPがNポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダル83を踏み込んだままシフトポジションSPをNポジションからDポジションへと切り替えたとしても、ハイブリッド自動車20を急発進(急加速)させることなくスムースに走行させることができる。従って、上記実施例では、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。
【0060】
また、実施例のハイブリッド自動車20は、駆動輪39a,39bの空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、車両運動統合制御を実行して挙動不安定状態を解消するためにリングギヤ軸32aに出力すべきトルクである制限トルクTlimをハイブリッドECU70を出力するブレーキECU95と、ブレーキECU95による車両運動統合制御の解除を運転者に許容するVDIM解除スイッチ88とを有している。そして、ハイブリッド自動車20では、VDIM解除スイッチ88を介してブレーキECU95による車両運動統合制御が解除されている場合には、シフトポジションSPがNポジションからDポジションへと切り替えられる際に運転者によるアクセル開度Accが閾値A2以上であるか否かに拘わらず、通常時と同様にアクセル開度Accに応じた要求トルクTrqが目標トルクT*として設定される(図4のステップS3100,S3101,S3110)。すなわち、ブレーキECU95による車両運動統合制御が解除された場合、ハイブリッド自動車20の挙動が多少不安定になることを運転者が容認しているとみなすことができる。従って、運転者により車両運動統合制御が解除されている場合、通常時と同様にアクセル開度Accに基づいて目標トルクT*が設定されるようにすれば、運転者の意図に即しながらハイブリッド自動車20を比較的急峻に発進(加速)させることも可能となる。
【0061】
更に、上記実施例では、アクセル開度Accに基づいて走行に要求される要求トルクTrqが設定され(図4のステップS3100)、通常時には、要求トルクTrqがそのまま目標トルクT*として設定されると共に(図4のステップS3110)、上記条件成立時には、要求トルクTrqと緩変化制約としての時定数τおよび上記式(3)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定される(図4のステップS3108)。これにより、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0062】
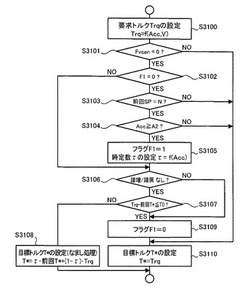
ただし、図3のステップS310における目標トルクT*の設定処理は、図8に示すような処理とされてもよい。図8に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3101〜S3104と同様のステップS3111〜S3114の処理を実行し、ステップS3114にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと時定数τ′との関係を規定する図示しない時定数設定用マップからステップS300にて入力したアクセル開度Accに対応した時定数τ′を導出・設定する(S3115)。次いで、図4のステップS3106と同様のステップS3116の処理と、ステップS300にて入力したアクセル開度Accから前回の実行用アクセル開度Acc*(初期値0)を減じた値であるアクセル開度偏差が予め定められた閾値α以下であるか否かの判定処理(ステップS3117)とを実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつアクセル開度偏差が閾値αを上回っていれば、アクセル開度Accと緩変化制約としてのステップS3115にて設定される時定数τ′と次式(8)とに基づいて実行用アクセル開度Acc*を通常時に比べて緩やかに変化するように設定する(ステップS3118)。これに対して、ステップS3113やステップS3114において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3116,S3119)、アクセル開度偏差が閾値α以下になったとき(ステップS3117,S3119)、更には運転者により車両運動統合制御が解除されているとき(ステップS3111)には、ステップS300にて入力されたアクセル開度Accがそのまま実行用アクセル開度Acc*として設定される(S3120)。こうして実行用アクセル開度Acc*が設定されると、図5の要求トルク設定用マップと同様のマップから当該実行用アクセル開度Acc*と車速Vとに対応した目標トルクT*が導出・設定され(ステップS3121)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御されることになる。このように、運転者によるアクセル開度Accと緩変化制約としての時定数τ′と式(8)とに基づいて実行用アクセル開度Acc*を通常時に比べて緩やか変化させると共に、実行用アクセル開度Acc*に基づいて目標トルクT*を設定しても、当該目標トルクT*をより適正に緩変化させることが可能となる。また、このように実行用アクセル開度Acc*を緩変化させる場合、緩変化処理の解除条件は、図示するように、通常時等と同様にして設定される実行用アクセル開度Acc*に一致するステップS300にて入力されるアクセル開度Accと前回の実行用アクセル開度Acc*とがある程度近づいたときに成立するもの(ステップS3117)を含むと好ましい。
【0063】
Acc* = τ′・前回Acc* + (1-τ′)・Acc …(8)
【0064】
また、上述のように時定数τまたはτ′を用いたなまし処理により目標トルクT*または実行用アクセル開度Acc*を緩変化させる代わりに、図9および図10に示すように、目標トルクT*または実行用アクセル開度Acc*を増加側および減少側の許容変化量である上下限レートdTまたはdAを用いたレート処理により緩変化させてもよい。図9に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3100〜S3104と同様のステップS3130〜S3134の処理を実行し、ステップS3134にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと上下限レートdTとの関係を規定する図示しない上下限レート設定用マップからステップS300にて入力したアクセル開度Accに対応した上下限レートdTを導出・設定する(S3135)。次いで、図4のステップS3106およびS3107と同様のステップS3136およびS3137の処理を実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつ要求トルクTrqから前回の目標トルクT*を減じた値であるトルク偏差が閾値T0を上回っていれば、ステップS3130にて入力した要求トルクTrqと前回の目標トルクT*とステップS3135にて設定した上下限レートdTとを用いた次式(9)に従うレート処理により目標トルクT*を設定する(ステップS3138)。これに対して、ステップS3133やステップS3134において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3136,S3139)、トルク偏差が閾値T0以下になったとき(ステップS3137,S3139)、更には運転者により車両運動統合制御が解除されているとき(ステップS3131)には、ステップS3100にて設定された要求トルクTrqがそのまま目標トルクT*として設定される(ステップS3140)。このように、要求トルクTrqと緩変化制約としての上下限レートdTおよび式(9)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定しても、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0065】
T* = min(max(Trq, 前回T*-dT), 前回T*+dT) …(9)
【0066】
一方、図10に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図8のステップS3111〜S3114と同様のステップS3141〜S3144の処理を実行し、ステップS3144にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと上下限レートdAとの関係を規定する図示しない上下限レート設定用マップからステップS300にて入力したアクセル開度Accに対応した上下限レートdAを導出・設定する(S3145)。次いで、図8のステップS3116およびS3117と同様のステップS3146およびS3147の処理を実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつアクセル開度Accから前回の実行用アクセル開度Accを減じた値であるアクセル開度偏差が閾値αを上回っていれば、ステップS300にて入力したアクセル開度Accと前回の実行用アクセル開度Acc*とステップS3145にて設定した上下限レートdAとを用いた次式(10)に従うレート処理により実行用アクセル開度Acc*を設定する(ステップS3148)。これに対して、ステップS3143やステップS3144において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3146,S3149)、アクセル開度偏差が閾値α以下になったとき(ステップS3147,S3149)、更には運転者により車両運動統合制御が解除されているとき(ステップS3141)には、ステップS300にて入力されたアクセル開度Accがそのまま実行用アクセル開度Acc*として設定される(ステップS3150)。そして、ステップS3148またはS3150にて実行用アクセル開度Acc*が設定されると、図5の要求トルク設定用マップと同様のマップから当該実行用アクセル開度Acc*と車速Vとに対応した目標トルクT*が導出・設定される(ステップS3151)。このように、アクセル開度Accと緩変化制約としての上下限レートdAおよび式(10)とに基づいて実行用アクセル開度Accが通常時に比べて緩やかに変化するように設定しても、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0067】
Acc* = min(max(Acc, 前回Acc*-dA), 前回Acc*+dA) …(10)
【0068】
図11は、更に他の目標トルクT*の設定処理を例示するフローチャートである。図11に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3100〜S3104と同様のステップS3160〜S3164の処理を実行し、ステップS3164にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共にタイマ78をオンし、更にNポジションからDポジションへの切り替え時におけるアクセル開度Accと目標トルクT*の上限値である上限ガード値Tulとの関係を規定する図示しない上限ガード値設定用マップからステップS300にて入力したアクセル開度Accに対応した上限ガード値Tulを導出・設定する(S3165)。次いで、図4のステップS3106と同様のステップS3166の処理と、タイマ78の計時時間tが所定時間tref以上であるか否かの判定処理(ステップS3167)とを実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつ計時時間tが所定時間tref未満であれば、ステップS3160にて設定された要求トルクTrqとステップS3165にて設定された上限ガード値Tulとの小さい方を目標トルクT*として設定する(ステップS3168)。これに対して、ステップS3163やステップS3164において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3166,S3169)、タイマ78の計時時間tが所定時間tref以上になったとき(ステップS3167,S3169)、更には運転者により車両運動統合制御が解除されているとき(ステップS3161)には、ステップS3100にて設定された要求トルクTrqがそのまま目標トルクT*として設定される(ステップS3170)。このように、NポジションからDポジションへの切り替え時のアクセル開度Accに応じた目標トルクT*の上限値である上限ガード値Tulを用いて目標トルクT*を制限することで、シフトポジションSPがNポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションSPをNポジションからDポジションへと切り替えたとしても、ハイブリッド自動車20が急発進あるいは急加速してしまうことを抑制することができる。従って、図11の目標トルクT*の設定処理を採用しても、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。また、このような上限ガード値Tulを用いた上限制限処理を実行する場合、当該上限制限処理の解除条件は、図示するように上限制限処理を実行した時間tが所定時間trefに達したときに成立するものを含むと好ましい。また、図11の例のように、目標トルクT*の上限値である上限ガード値Tulを用いて目標トルクT*を制限する代わりに、図12に例示するように、実行用アクセル開度Acc*の上限値である上下限ガード値Aulを用いて目標トルクT*を制限してもよい。図12の目標トルクT*の設定処理では、NポジションからDポジションへの切り替え時におけるアクセル開度Accとアクセル開度Accの上限値である上限ガード値Aulとの関係を規定する図示しない上限ガード値設定用マップからステップS300にて入力したアクセル開度Accに対応した上限ガード値Aulを導出・設定し(ステップS3175)、アクセルペダル83の踏み増しや踏み戻しがなく(ステップS3176)、かつ計時時間tが所定時間tref未満であれば(ステップS3177)、ステップS300にて入力したアクセル開度AccとステップS3175にて設定された上限ガード値Aulとの小さい方を実行用アクセル開度Acc*として設定する(ステップS3178)。ただし、図12において、ステップS3171〜S3174およびS3179は、図11のステップS3161〜S3164およびS3169と同様の処理であり、ステップS3180およびS3181は、図8のステップS3120およびS3121等と同様の処理である。
【0069】
なお、上記実施例では、シフトポジションSPがNポジションからDポジションに切り替えられたときに図3の駆動制御ルーチンや図4、図8〜図12の目標トルクT*の設定処理が実行されることになるが、シフトポジションSPがNポジションから走行ポジションであるBポジションやRポジションに切り替えられたときにも図3の駆動制御ルーチンや図4、図8〜図12の目標トルクT*の設定処理と同様の制御が実行されてもよいことはいうまでもない。また、上記実施例のハイブリッド自動車20では、車軸としてのリングギヤ軸32aとモータMG2とがモータMG2の回転数を減速してリングギヤ軸32aに伝達する減速ギヤ35を介して連結されているが、減速ギヤ35の代わりに、例えばHi,Loの2段の変速段あるいは3段以上の変速段を有したモータMG2の回転数を変速してリングギヤ軸32aに伝達する変速機を採用してもよい。更に、実施例のハイブリッド自動車20は、モータMG2の動力をリングギヤ軸32aに接続された車軸に出力するものであるが、本発明の適用対象はこれに限られるものでもない。すなわち、本発明は、図13に示す変形例としてのハイブリッド自動車120のように、モータMG2の動力をリングギヤ軸32aに接続された車軸(車輪39a,39bが接続された車軸)とは異なる車軸(図13における車輪39c,39dに接続された車軸)に出力するものに適用されてもよい。また、実施例のハイブリッド自動車20は、エンジン22の動力を動力分配統合機構30を介して車輪39a,39bに接続される車軸としてのリングギヤ軸32aに出力するものであるが、本発明の適用対象は、これに限られるものでもない。すなわち、本発明は、図14に示す変形例としてのハイブリッド自動車220のように、エンジン22のクランクシャフトに接続されたインナーロータ232と車輪39a,39bに動力を出力する車軸に接続されたアウターロータ234とを有し、エンジン22の動力の一部を車軸に伝達すると共に残余の動力を電力に変換する対ロータ電動機230を備えたものに適用されてもよい。
【0070】
ここで、上記実施例および変形例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明しておく。すなわち、上記実施例等においては、エンジン22が「内燃機関」に相当し、モータMG2が「電動機」に相当し、モータMG2と電力をやり取り可能なバッテリ50が「蓄電手段」に相当し、シフトレバー81が「シフトポジション選択手段」に相当し、アクセルペダルポジションセンサ84が「アクセル操作量取得手段」に相当し、図4および図8から図11の目標トルクT*の設定処理を実行するハイブリッドECU70が「目標駆動力設定手段」に相当し、図3の駆動制御ルーチンを実行するハイブリッドECU70、エンジンECU24およびモータECU40の組み合わせが「制御手段」に相当する。また、車両運動統合制御を実行可能なブレーキECU95が「制限駆動力設定手段」に相当し、VDIM解除スイッチ88が「制限駆動力設定解除手段」に相当し、モータMG1および動力分配統合機構30や対ロータ電動機230が「電力動力入出力手段」に相当し、モータMG1や対ロータ電動機230が「発電用電動機」に相当し、動力分配統合機構30が「3軸式動力入出力手段」に相当する。更に、モータMG1が「モータリング手段」に相当し、図2のNポジション時制御ルーチンを実行するハイブリッドECU70、エンジンECU24およびモータECU40の組み合わせが「ニュートラル時制御手段」に相当する。
【0071】
ただし、「内燃機関」は、ガソリンや軽油といった炭化水素系の燃料の供給を受けて動力を出力するエンジン22に限られず、水素エンジンといったような他の如何なる形式のものであっても構わない。「電動機」や「発電用電動機」は、モータMG1,MG2のような同期発電電動機に限られず、誘導電動機といったような他の如何なる形式のものであっても構わない。「蓄電手段」は、バッテリ50のような二次電池に限られず、電動機と電力をやり取り可能なものであればキャパシタといったような他の如何なる形式のものであっても構わない。「アクセル操作量取得手段」は、運転者によるアクセル操作量を取得可能なものであれば、如何なる形式のものであっても構わない。「制御手段」や「ニュートラル時制御手段」は、ハイブリッドECU70とエンジンECU24とモータECU40との組み合わせ以外の他の如何なる形式のものであっても構わない。何れにしても、これら実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための最良の形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載した発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0072】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において、様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0073】
本発明は、ハイブリッド自動車の製造産業等において利用可能である。
【図面の簡単な説明】
【0074】
【図1】本発明の実施例に係るハイブリッド自動車20の概略構成図である。
【図2】ハイブリッドECU70により実行されるNポジション時制御ルーチンの一例を示すフローチャートである。
【図3】ハイブリッドECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図4】目標トルクT*の設定処理の一例を示す説明図である。
【図5】要求トルク設定用マップの一例を示す説明図である。
【図6】動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図を例示する説明図である。
【図7】エンジン22の動作ラインと目標回転数Ne*と目標トルクTe*との相関曲線とを例示する説明図である。
【図8】目標トルクT*の設定処理の他の例を示す説明図である。
【図9】目標トルクT*の設定処理の更に他の例を示す説明図である。
【図10】目標トルクT*の設定処理の他の例を示す説明図である。
【図11】目標トルクT*の設定処理の更に他の例を示す説明図である。
【図12】目標トルクT*の設定処理の他の例を示す説明図である。
【図13】変形例に係るハイブリッド自動車120の概略構成図である。
【図14】他の変形例に係るハイブリッド自動車220の概略構成図である。
【符号の説明】
【0075】
20,120,220 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 キャリア、35 減速ギヤ、37 ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、39c,39d 車輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、51 温度センサ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、72 CPU、74 ROM、76 RAM、78 タイマ、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルストロークセンサ、87 車速センサ、88 VDIM解除スイッチ、89a〜89d 車輪速センサ、90 ブレーキユニット、91 マスタシリンダ、92 ブレーキアクチュエータ、93a〜93d ホイールシリンダ、95 ブレーキ用電子制御ユニット(ブレーキECU)、230 対ロータ電動機、232 インナーロータ、234 アウターロータ、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、ハイブリッド自動車およびその制御方法に関する。
【背景技術】
【0002】
従来から、ハイブリッド自動車として、車軸に遊星歯車機構を介して接続された内燃機関と、当該遊星歯車機構に接続された発電機と、2つの油圧式ブレーキを有する変速機を介して上記車軸に接続された電動機とを備えたものが知られている(例えば、特許文献1参照)。このハイブリッド自動車では、シフトポジションがニュートラルポジション(Nレンジ)であると共に発電機および電動機用のインバータがシャットダウンされているときに内燃機関の始動が指示された場合、車速が値0でない場合には車速が値0となるまで内燃機関の始動が禁止される。また、車速が値0である場合には、変速機の2つの油圧式のブレーキをオンすることで車軸の回転をロックすると共に発電機用のインバータのシャットダウンを解除し、発電機により内燃機関をクランキングして始動させる。このように、発電機により内燃機関をクランキングする際に車軸に作用する反力を変速機の油圧式のブレーキにより受け持つようにすれば、電動機からの出力が制限される場合であっても内燃機関の始動に伴うショックの発生を抑制することができる。
【特許文献1】特開2005−306238号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上述のようなハイブリッド自動車において、シフトポジションをニュートラルポジションに設定した状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだり、アクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジション(Dレンジ等)に切り替えたりすることも考えられる。しかしながら、上記特許文献には、これらの状況下でハイブリッド自動車をどのように制御するか何ら開示されてはない。
【0004】
そこで、本発明は、シフトポジションがニュートラルポジションに設定された状態で運転者による操作がなされたときに、ハイブリッド自動車をより適正に制御することを主目的とする。
【課題を解決するための手段】
【0005】
本発明によるハイブリッド自動車およびその制御方法は、上記主目的を達成するために以下の手段を採っている。
【0006】
本発明によるハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記取得されたアクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるものである。
【0007】
このハイブリッド自動車では、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、アクセル操作量に基づいて走行用の動力の目標値である目標駆動力が設定されると共に、当該目標駆動力に基づく走行用の動力が得られるように内燃機関と電動機とが制御される。また、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際に所定条件が成立する条件成立時には、所定の解除条件が成立するまで、取得されたアクセル操作量と所定の緩変化制約とに基づいて目標駆動力が通常時に比べて緩やかに変化するように設定されると共に、当該目標駆動力に基づく走行用の動力が得られるように内燃機関と電動機とが制御される。これにより、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。なお、所定の解除条件は、通常時と同様にして設定される目標駆動力と緩変化制約を用いて設定される目標駆動力との偏差がある程度近づいたときや、アクセルペダルが比較的大きく踏み増されるか、あるいは踏み戻されたとき等に成立するものとされてもよい。
【0008】
また、前記目標駆動力設定手段は、前記取得されたアクセル操作量に基づいて走行に要求される要求駆動力を設定すると共に、前記通常時には、前記設定された要求駆動力に基づいて走行用の動力の目標値である目標駆動力を設定し、前記条件成立時には、前記設定された要求駆動力と前記緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するものであってもよい。これにより、目標駆動力をより適正に緩変化させ、アクセルペダルが踏み込まれたままシフトポジションがニュートラルポジションから走行ポジションへと切り替えられたときのハイブリッド自動車の挙動をより安定化させることが可能となる。
【0009】
更に、前記目標駆動力設定手段は、前記通常時には、前記取得されたアクセル操作量を実行用アクセル操作量として設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定し、前記条件成立時には、前記取得されたアクセル操作量と前記緩変化制約とに基づいて前記実行用アクセル操作量を前記通常時に比べて緩やかに変化するように設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定するものであってもよい。このように、運転者によるアクセル操作量と緩変化制約とに基づいて実行用アクセル操作量を通常時に比べて緩やか変化させると共に、実行用アクセル操作量に基づいて目標駆動力を設定しても、当該目標駆動力をより適正に緩変化させることが可能となる。この場合、上記所定の解除条件は、通常時と同様にして設定される実行用アクセル操作量と緩変化制約を用いて設定される実行用アクセル操作量とがある程度近づいたときに成立するものとされてもよい。
【0010】
また、前記所定の緩変化制約は、時定数を用いたなまし処理により前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量を緩変化させる制約であってもよい。更に、前記所定の緩変化制約は、前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量の少なくとも増加側の許容変化量である上限レートを用いたレート処理により前記目標駆動力を緩変化させる制約であってもよい。
【0011】
本発明による他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるものである。
【0012】
このハイブリッド自動車では、基本的に運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力が設定されるが、運転者によりシフトポジションがニュートラルポジションから走行ポジションへと切り替えられる際にアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、ニュートラルポジションから走行ポジションへの切り替え時のアクセル操作量に応じた目標駆動力またはアクセル操作量の上限値を用いた上限制限処理を伴って目標駆動力が設定される。このように、ニュートラルポジションから走行ポジションへの切り替え時のアクセル操作量に応じた目標駆動力またはアクセル操作量の上限値を用いて目標駆動力を制限することで、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車が急発進あるいは急加速してしまうことを抑制することができる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。なお、所定の解除条件は、上限制限処理を実行した時間が所定時間に達したとき等に成立するものとされてもよい。
【0013】
また、前記ハイブリッド自動車は、駆動輪の空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、走行用の動力の前記挙動不安定状態を解消するための目標値である制限駆動力を設定する制限駆動力設定手段と、前記制限駆動力設定手段による前記制限駆動力の設定の解除を運転者に許容する制限駆動力設定解除手段とを更に備えてもよく、前記目標駆動力設定手段は、前記制限駆動力設定手段による前記制限駆動力の設定が解除されている場合には、前記所定条件の成立の有無に拘わらず前記通常時と同様に前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定するものであってもよい。すなわち、制限駆動力設定手段による制限駆動力の設定が解除された場合には、ハイブリッド自動車の挙動が多少不安定になることを運転者が容認しているとみなすことができる。従って、運転者により制限駆動力の設定が解除されている場合、上記所定条件が成立の有無に拘わらず、通常時と同様にアクセル操作量に基づいて目標駆動力が設定されるようにすれば、運転者の意図に即しながらハイブリッド自動車を比較的急峻に発進(加速)させることが可能となる。
【0014】
更に、前記ハイブリッド自動車は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段を更に備えてもよく、前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であってもよい。この場合、前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むものであってもよい。
【0015】
本発明による更に他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するニュートラル時制御手段と、
を備えるものである。
【0016】
このハイブリッド自動車では、シフトポジションがニュートラルポジションに設定されると共に内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となると、モータリング手段によるモータリングを伴って内燃機関が始動されるように内燃機関とモータリング手段とが制御される。これにより、このハイブリッド自動車では、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を内燃機関を始動させることで運転者に認識させると共に、内燃機関のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、この発明によれば、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0017】
また、前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に該内燃機関が始動された後、前記取得されたアクセル操作量が所定の閾値未満である場合には、前記内燃機関が自立運転されるように該内燃機関を制御し、前記取得されたアクセル操作量が前記所定の閾値以上である場合には、前記内燃機関の回転数が前記取得されたアクセル操作量に応じた値となるように該内燃機関と前記モータリング手段とを制御するものであってもよい。これにより、シフトポジションがニュートラルポジションに設定された状態で内燃機関が始動された後に、当該内燃機関をより適正に作動させると共に、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を運転者により的確に認識させることが可能となる。
【0018】
更に、前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、所定の機関始動禁止条件が成立している場合には、前記内燃機関を始動させることなく、前記シフトポジションが前記ニュートラルポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するものであってもよい。これにより、シフトポジションがニュートラルポジションに設定されると共に内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、当該内燃機関を始動させることができない場合であっても、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を運転者に認識させることが可能となる。
【0019】
また、前記モータリング手段は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段であってもよく、前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であってもよい。この場合、前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むものであってもよい。
【0020】
本発明によるハイブリッド自動車の制御方法は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記アクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むものである。
【0021】
この方法によれば、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0022】
本発明による他のハイブリッド自動車は、
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記アクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むものである。
【0023】
この方法によれば、シフトポジションがニュートラルポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションをニュートラルポジションから走行ポジションへと切り替えたとしても、ハイブリッド自動車を急発進(急加速)させることなくスムースに走行させることができる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【0024】
本発明による更に他のハイブリッド自動車の制御方法は、
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するステップ、
を含むものである。
【0025】
この方法によれば、シフトポジションがニュートラルポジションに設定されている最中にアクセル操作がなされた旨を内燃機関を始動させることで運転者に認識させると共に、内燃機関のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、シフトポジションがニュートラルポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車をより適正に制御することが可能となる。
【発明を実施するための最良の形態】
【0026】
次に、本発明を実施するための最良の形態を実施例を用いて説明する。
【実施例】
【0027】
図1は、本発明の実施例に係るハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、エンジン22と、エンジン22のクランクシャフト(機関軸)26にダンパ28を介して接続された3軸式の動力分配統合機構30と、動力分配統合機構30に接続された発電可能なモータMG1と、動力分配統合機構30に接続された車軸としてのリングギヤ軸32aに取り付けられた減速ギヤ35と、この減速ギヤ35を介してリングギヤ軸32aに機械的に接続されたモータMG2と、摩擦制動力を出力可能な制動手段である電子制御式油圧ブレーキユニット(以下、単に「ブレーキユニット」という)90と、ハイブリッド自動車20の全体をコントロールするハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70等とを備えるものである。
【0028】
エンジン22は、ガソリンや軽油といった炭化水素系の燃料の供給を受けて動力を出力する内燃機関であり、エンジン用電子制御ユニット(以下、「エンジンECU」という)24により燃料噴射量や点火時期、吸入空気量等の制御を受けている。エンジンECU24には、エンジン22に対して設けられて当該エンジン22の運転状態を検出する各種センサからの信号が入力される。そして、エンジンECU24は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号や上記センサからの信号等に基づいてエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に出力する。
【0029】
動力分配統合機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行う遊星歯車機構として構成されている。機関側回転要素としてのキャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはモータMG1が、車軸側回転要素としてのリングギヤ32にはリングギヤ軸32aを介して減速ギヤ35がそれぞれ接続されており、動力分配統合機構30は、モータMG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側とにそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構37およびデファレンシャルギヤ38を介して最終的に駆動輪39a,39bに出力される。
【0030】
モータMG1およびMG2は、何れも発電機として作動すると共に電動機として作動可能な周知の同期発電電動機として構成されており、インバータ41,42を介して二次電池であるバッテリ50と電力のやり取りを行う。インバータ41,42とバッテリ50とを接続する電力ライン54は、各インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1,MG2の何れか一方により発電される電力を他方のモータで消費できるようになっている。従って、バッテリ50は、モータMG1,MG2の何れかから生じた電力や不足する電力により充放電されることになり、モータMG1,MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されないことになる。モータMG1,MG2は、何れもモータ用電子制御ユニット(以下、「モータECU」という)40により駆動制御されている。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力されており、モータECU40からは、インバータ41,42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいて図示しない回転数算出ルーチンを実行し、モータMG1,MG2の回転子の回転数Nm1,Nm2を計算している。更に、モータECU40は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号等に基づいてモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをハイブリッドECU70に出力する。
【0031】
バッテリ50は、バッテリ用電子制御ユニット(以下、「バッテリECU」という)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからのバッテリ電圧、バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流、バッテリ50に取り付けられた温度センサ51からのバッテリ温度Tb等が入力されている。バッテリECU52は、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッドECU70やエンジンECU24に出力する。更に、バッテリECU52は、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいて残容量SOCを算出したり、当該残容量SOCに基づいてバッテリ50の充放電要求パワーPb*を算出したり、残容量SOCと電池温度Tbとに基づいてバッテリ50の充電に許容される電力である充電許容電力としての入力制限Winとバッテリ50の放電に許容される電力である放電許容電力としての出力制限Woutとを算出したりする。なお、バッテリ50の入出力制限Win,Woutは、バッテリ温度Tbに基づいて入出力制限Win,Woutの基本値を設定すると共に、バッテリ50の残容量SOCに基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定可能である。
【0032】
ブレーキユニット90は、マスタシリンダ91や流体圧式(油圧式)のブレーキアクチュエータ92、駆動輪39a,39bや図示しない転動輪に対して設けられ、各車輪に取り付けられたブレーキディスクを挟持して対応する車輪に摩擦制動力を付与可能なブレーキパッドを駆動するホイールシリンダ93a〜93d、ホイールシリンダ93a〜93dごとに設けられて対応するホイールシリンダの油圧(ホイールシリンダ圧)を検出する図示しないホイールシリンダ圧センサ、ブレーキアクチュエータ92を制御するブレーキ用電子制御ユニット(以下、「ブレーキECU」という)95等を含む。ブレーキアクチュエータ92は、図示しない油圧発生源としてのポンプやアキュムレータ、マスタシリンダ91とホイールシリンダ93a〜93dとの連通状態を制御するマスタシリンダカットソレノイドバルブ、ブレーキペダル85の踏み込み量に応じてペダル踏力に対する反力を創出するストロークシミュレータ等を有する。また、ブレーキECU95は、図示しない信号ラインを介して、マスタシリンダ圧を検出する図示しないマスタシリンダ圧センサからのマスタシリンダ圧や、ホイールシリンダ圧センサからのホイールシリンダ圧、駆動輪39a,39bの車輪速を検出する車輪速センサ89a,89bや図示しない転動輪の車輪速を検出する車輪速センサ89c,89dからの車輪速、図示しない操舵角センサからの操舵角等を入力すると共に、ハイブリッドECU70等との間で通信により各種信号のやり取りを行う。そして、ブレーキECU95は、ブレーキペダル85の踏み込み量を示すブレーキペダルストロークBSや車速V等に基づいてハイブリッド自動車20に作用させるべき制動トルクのうちのブレーキユニット90による分担分に応じた摩擦制動トルクが駆動輪39a,39bや転動輪に作用するようにブレーキアクチュエータ92を制御する。また、ブレーキECU95は、運転者によるブレーキペダル85の踏み込み操作とは無関係に、駆動輪39a,39bや転動輪に制動用のトルクが作用するようブレーキアクチュエータ92を制御することもできる。
【0033】
更に、ブレーキECU95は、駆動輪の空転や車両が横滑りした際の安定性を確保すべく、各種入力信号に基づいていわゆるアンチロック制御(ABS)や駆動輪39a,39bの何れかが空転によりスリップするのを抑制するトラクションコントロール(TRC)、旋回走行時にハイブリッド自動車20の姿勢を安定に保持する車両安定化制御(VSC)等をも実行可能である。ここで、実施例のブレーキECU95は、これらのVSC等を実行するに際して、ブレーキアクチュエータ92等を個別に制御する代わりに、ブレーキアクチュエータ92の制御と駆動力制御とステアリング制御とを統合した車両運動統合制御(VDIM:Vehicle Dynamics Integrated Management)を実行する。例えば、ブレーキECU95は、トラクションコントロール(TRC)の実行に際して、駆動輪39a,39bの車輪速を車体速に換算したものと推定車体速との偏差であるスリップ速度が比較的低い所定速度(例えば、1〜5km/h)以上となっている駆動輪にスリップが生じていると判定し、スリップを生じていると判定された駆動輪39a,39bにスリップ速度が大きいほど大きな制動トルクが付与されるようブレーキアクチュエータ92を制御したり、主にモータMG2からのトルク出力が制限されるようにしてスリップ状態のような挙動不安定状態を解消するためにリングギヤ軸32aに出力すべきトルクである制限トルク(制限駆動力)TlimをハイブリッドECU70を出力したりする。また、実施例のブレーキECU95には、運転に長けた運転者の中には車両側からの運転支援を好まない者もいることを踏まえて、ブレーキECU95によるTRC等の車両運動統合制御を解除可能とするVDIM解除スイッチ88が接続されている。運転者によりVDIM解除スイッチ88が操作されて車両運動統合制御が解除されると、ブレーキECU95は、通常時には値0に設定される所定のVDIM解除フラグFvcanを値1に設定すると共に、車両運動統合制御を実行することなく更に車両運動統合制御の実行の有無を示す所定のVDIMフラグFvdimを値0に設定する。これに対して、運転者によりVDIM解除スイッチ88を介して車両運動統合制御が解除されていない場合、ブレーキECU95は、上記VDIM解除フラグFvcanを値0に設定する。更に、ブレーキECU95は、VDIM解除スイッチ88を介して車両運動統合制御が解除されていないときに車両運動統合制御を実行すべき場合には、上記VDIMフラグFvdimを値1に設定すると共に、何れも図示しないGセンサやヨーレートセンサ等からの信号に基づいて目標車両挙動や実際の車両状態量を演算し、演算した目標車両挙動と車両状態量とに基づいてブレーキアクチュエータ92への指令値や、ハイブリッドECU70への制限トルク(制限駆動力)Tlim、操舵ECUへの操舵補正量等を設定する。なお、実施例において、ブレーキECU95は、運転者によりVDIM解除スイッチ88を介して車両運動統合制御が解除されていないときであっても車両運動統合制御を実行する必要がない場合には、車両運動統合制御を実行することなくVDIMフラグFvdimを値0に設定する。
【0034】
ハイブリッドECU70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74、データを一時的に記憶するRAM76、計時指令に応じて計時処理を実行するタイマ78、図示しない入出力ポートおよび通信ポート等を備える。ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置であるシフトポジションSPを検出するシフトポジションセンサ82からのシフトポジションSP、運転者によるアクセル操作量であるアクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速Vを取得する車速センサ87からの車速V、車輪速センサ89a〜89dからの車輪速等が入力ポートを介して入力される。そして、ハイブリッドECU70は、上述したように、エンジンECU24やモータECU40、バッテリECU52、ブレーキECU95等と通信ポートを介して接続されており、エンジンECU24やモータECU40、バッテリECU52、ブレーキECU95等と各種制御信号やデータのやり取りを行う。なお、実施例のハイブリッド自動車20では、シフトレバー81のシフトポジションSPとして、駐車時に用いる駐車ポジション(Pポジション)、後進走行用のリバースポジション(Rポジション)、基本的にエンジン22が停止されると共にインバータ41,42がシャットダウンされる(すべてのスイッチング素子がオフされる)ニュートラルポジション(Nポジション)、通常の前進走行用のドライブポジション(Dポジション)、所定条件下でアクセルオフとなったときにDポジション選択時に比べて大きな制動力が得られるようにするブレーキポジション(Bポジション)等が用意されている。
【0035】
上述のように構成された実施例のハイブリッド自動車20では、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて車軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*が計算され、この目標トルクT*に基づくトルクがリングギヤ軸32aに出力されるようにエンジン22とモータMG1とモータMG2とが制御される。エンジン22とモータMG1とモータMG2の運転制御モードとしては、目標トルクT*に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されてリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御するトルク変換運転モードや、目標トルクT*とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って目標トルクT*に応じたトルクがリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2から目標トルクT*に見合う動力をリングギヤ軸32aに出力するように運転制御するモータ運転モード等がある。
【0036】
次に、上述のように構成されたハイブリッド自動車20の動作、特に運転者によりシフトポジションSPとしてニュートラルポジション(以下「Nポジション」という)が設定されているときの動作について説明する。図2は、ハイブリッド自動車20が停車した状態で運転者によりシフトポジションSPがNポジションに設定されているときにハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行されるNポジション時制御ルーチンの一例を示すフローチャートである。なお、ハイブリッド自動車20において、シフトポジションSPがNポジションに設定されると、基本的にエンジン22が停止されると共にインバータ41,42がシャットダウンされるのは上述のとおりである。
【0037】
図2のNポジション時制御ルーチンの開始に際して、ハイブリッドECU70のCPU72は、シフトポジションセンサ82からのシフトポジションSPやアクセルペダルポジションセンサ84からのアクセル開度Acc、モータMG1,MG2の回転数Nm1,Nm2、エンジン22の回転数Ne、充電フラグFchgの値、エンジン始動禁止フラグFsdの値、エンジン運転フラグFegの値といった制御に必要なデータの入力処理を実行する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2はモータECU40から通信により入力するものとし、エンジン22の回転数Neはクランクシャフト26に取り付けられた図示しないクランクポジションセンサからの信号に基づいて計算された値をエンジンECU24から通信により入力するものとした。また、充電フラグFchgは、バッテリECU52により通常時に値0に設定されると共に残容量SOC等に基づいてバッテリ50を強制的に充電すべきときに値1に設定されるものであり、バッテリECU52から通信により入力する。更に、エンジン始動禁止フラグFsdは、エンジンECU24やバッテリECU52により設定されたものを通信により入力するものとした。実施例において、エンジン始動禁止フラグFsdは、エンジンECU24によりエンジン22の状態を示す各種パラメータに基づいてエンジン22の始動(作動)を許容し得るときに値0に設定されると共に例えば冷却水温等が過剰に高まっている場合のようなエンジン22を始動(作動)させるべきではないと判断される場合に値1に設定される。また、エンジン始動禁止フラグFsdは、バッテリECU52により残容量SOCや入出力制限Win,Wout等に基づいてエンジン22の始動(作動)を許容し得るときに値0に設定されると共に、例えば残容量SOCが極めて少ない場合のようなエンジン22を始動(作動)させるべきではないと判断される場合に値1に設定される。そして、エンジン運転フラグFegは、実施例では、エンジンECU24によりエンジン22の運転が停止されているときに値0に設定されると共にエンジン22が運転されているときに値1に設定されるものであり、エンジンECU24から通信により入力する。
【0038】
ステップS100のデータ入力処理の後、入力したシフトポジションSPがNポジションであるか否かを判定し(ステップS110)、シフトポジションがNポジションであれば、充電フラグFchgが値0であるか否かを判定する(ステップS120)。また、充電フラグFchgが値0であってバッテリ50を強制的に充電する必要がない場合には、エンジン運転フラグFegが値0であるか否かを判定し(ステップS130)、エンジン運転フラグFegが値0であってエンジン22の運転が停止されている場合には、エンジン22の始動処理が実行される間に値1に設定されるフラグF0が値0であるか否かを判定する(ステップS140)。更に、フラグF0が値0であってエンジン22の始動処理が実行されていない場合には、ステップS100にて入力したアクセル開度Accが予め定められた閾値A0以上であるか否かを判定する(ステップS150)。実施例では、閾値A0として、アクセルペダル83の不感帯等を考慮した値0に比較的近い正の値が用いられ、アクセル開度Accが閾値A0未満であって運転者によりアクセルペダル83が踏み込まれていないとみなされる場合には、再度ステップS100以降の処理を実行する。
【0039】
また、ステップS150にてアクセル開度Accが閾値A0以上であると判断された場合には、エンジン始動禁止フラグFsdが値0であるか否かを判定する(ステップS160)。そして、エンジン始動禁止フラグFsdが値0であってエンジン22の始動が禁止されていない場合には、モータECU40にインバータ41および42のシャットダウンを解除させるためのインバータシャットダウン解除指令を送信すると共に(ステップS170)、上記フラグF0を値1に設定した上で(ステップS180)、エンジン始動処理(ステップS190)を開始し、再度ステップS100以降の処理を実行する。こうしてエンジン始動処理が開始されると、シフトポジションSPがNポジションに保たれていれば、基本的にステップS140にて否定判断がなされ、ステップS190の処理が実行されることになる。ステップS190のエンジン始動処理は、所定のマップに従ってエンジン22をクランキングするようにモータMG1のトルク指令を設定すると共に、エンジン22のクランキングに伴ってリングギヤ軸32aに作用するトルクをキャンセルしてリングギヤ軸32aの回転数が値0になるように(ハイブリッド自動車20の停車状態が維持されるように)モータMG2のトルク指令を設定する処理である。また、ステップS190では、エンジン22のクランキングが開始された後の所定のタイミングで燃料噴射制御や点火制御が開始されるようにエンジン22に指令信号が送信される。そして、エンジン22が完爆に至ると、ステップS190のエンジン始動処理が完了し、ハイブリッドECU70によりフラグF0が値0に設定されると共に、エンジンECU24によりエンジン運転フラグFegが値1に設定される。このように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上になると、駆動軸としてのリングギヤ軸32aに走行用のトルクが出力されないようにすると共にモータMG1によるクランキング(モータリング)を伴ってエンジン22が始動されるようにエンジン22とモータMG1およびMG2が制御される。すなわち、ハイブリッド自動車20では、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨をエンジン22を始動させることで運転者に認識させると共に、エンジンのみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。なお、エンジン22の始動が完了すると、エンジン22は、実質的にトルクを出力することなく所定回転数(例えばアイドル時の回転数)で自立運転される。
【0040】
一方、ステップS150にてアクセル開度Accが閾値A0以上であると判断された後、エンジン始動禁止フラグFsdが値1であってエンジン22の始動が禁止されていると判断された場合には、インストルメントパネルに設けられた所定の表示部あるいはナビゲーションシステムの表示画面に「Nポジションでアクセルが踏み込まれています」といったような警告メッセージを表示させるべく、これら表示部の表示制御を行うメータECUに指令信号を送信し(ステップS200)、再度ステップS100以降の処理を実行する。このように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となったときにエンジン22の始動が禁止されている場合には、エンジン22を始動させることなく、所定の表示部にシフトポジションSPがNポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するための警告メッセージが表示されることになる。なお、ステップS200では、上述のような警告メッセージを表示部に表示させる代わりに、インストルメントパネル上等に設けられた所定の警告ランプを点灯あるいは点滅させてもよく、音声等による警告がなされてもよい。
【0041】
また、上述のエンジン始動処理(ステップS190)が実行されてエンジン22が始動された場合、シフトポジションSPがNポジションに保たれていれば、基本的にステップS130にて否定判断がなされ、ステップS100にて入力したアクセル開度Accが予め定められた閾値A1以上であるか否か判定される(ステップS210)。実施例では、閾値A1として、上述の値A0よりも大きい正の値が用いられるが、閾値A1として上述の値A0が用いられてもよい。そして、ステップS210にてアクセル開度Accが閾値A1以上であると判断された場合には、ステップS100にて入力したアクセル開度Accに基づいてエンジン22の目標回転数Ne*を設定する(ステップS220)。実施例では、アクセル開度AccとNポジション選択時におけるエンジン22の目標回転数Ne*との関係が予め定められて図示しない目標エンジン回転数設定用マップとしてROM74に記憶されており、ステップS220では、与えられたアクセル開度Accに対応した目標回転数Ne*が当該マップから導出・設定される。次いで、ステップS220にて設定した目標回転数Ne*とステップS100にて入力したエンジン22の回転数Neとを用いて次式(1)に従いモータMG1のトルク指令Tm1*を設定すると共に、設定したトルク指令Tm1*と動力分配統合機構30のギヤ比ρと減速ギヤ35のギヤ比Grとを用いて次式(2)に従いモータMG2のトルク指令Tm2*を設定する(ステップS230)。ここで、ここで、式(1)は、燃料カットされた状態のエンジン22をモータMG1により強制的にモータリングして回転数Neを目標回転数Ne*に一致させるためのフィードバック制御における関係式であり、式(1)中、右辺第1項の「k10」は比例項のゲインであり、右辺第2項の「k20」は積分項のゲインである。また、式(2)は、モータMG1によるエンジン22のモータリングに伴ってリングギヤ軸32aに作用するトルクをキャンセルしてリングギヤ軸32aの回転数を値0にするため(ハイブリッド自動車20の停車状態を維持するため)の関係式である。
【0042】
Tm1* = k10・(Ne*-Ne)+k20・∫(Ne*-Ne)dt …(1)
Tm2* = Tm1*/ρ/Gr …(2)
【0043】
こうしてモータMG1およびMG2のトルク指令Tm1*およびTm2*を設定したならば、エンジンECU24に対してエンジン22に対する燃料噴射を停止させるべく燃料カット指令を送信すると共に、モータMG1,MG2のトルク指令Tm1*,Tm2*をモータECU40に送信し(ステップS240)、再度ステップS100以降の処理を実行する。トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。これにより、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定された状態でステップS190のエンジン始動処理を経てエンジン22が始動された後、運転者によりアクセルペダル83が踏み込まれてアクセル開度Accが閾値A1以上となる場合には、駆動軸としてのリングギヤ軸32aに走行用のトルクが出力されないようにすると共にエンジン22の回転数Neがアクセル操作量Accに応じた目標回転数Ne*となるようにエンジン22とモータMG1およびMG2とが制御されることになる。これに対して、ステップS210にてアクセル開度Accが上記閾値A1未満であると判断された場合には、エンジンECU24に対してエンジン22が自立運転されるようにするための自立運転指令を送信し(ステップS250)、再度ステップS100以降の処理を実行する。これにより、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定された状態でステップS190のエンジン始動処理を経てエンジン22が始動された後、運転者によるアクセル開度Accが閾値A1未満となる場合、すなわち運転者によりアクセルペダル83が実質的に踏み込まれていない場合には、エンジン22が実質的にトルクを出力しないように自立運転されることになる。
【0044】
なお、図2のNポジション時制御ルーチンが実行されている最中に、ステップS120にて充電フラグFchgが値1であってバッテリ50を強制的に充電すべきと判断された場合には、所定のバッテリ充電処理(ステップS260)が実行されることになる。かかるバッテリ充電処理は、ステップS190と同様の処理によりエンジン22を始動させた後、エンジン22からの動力のすべてを用いて発電するようにモータMG1のトルク指令を設定すると共に、モータMG1の発電に伴ってリングギヤ軸32aに作用するトルクをキャンセルしてハイブリッド自動車20の停車状態が維持されるようにモータMG2のトルク指令を設定する処理である。また、図2のNポジション時制御ルーチンは、ステップS110にてシフトポジションSPが例えばDポジションといったNポジション以外の走行ポジションであると判断されると終了し、その後、例えばDポジションに対応した処理が実行されることになる。
【0045】
ここまで説明したように、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となると、モータMG1によるモータリングを伴ってエンジン22が始動されるようにエンジン22とモータMG1およびMG2とが制御される(ステップS150〜S190)。これにより、このハイブリッド自動車では、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨をエンジン22を始動させることで運転者に認識させると共に、エンジン22のみを走行用の動力発生源として備える通常の車両と同様の操作感を運転者に提供することが可能となる。従って、実施例では、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。
【0046】
また、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に当該エンジン22が始動された後、運転者によるアクセル開度Accが閾値A1以上である場合には、エンジン22の回転数が取得されたアクセル開度Accに応じた目標回転数Ne*となるようにエンジン22とモータMG1およびMG2とが制御される(ステップS220〜S240)。更に、エンジン22が始動された後、運転者によるアクセル開度Accが閾値A1未満である場合には、エンジン22が自立運転されるように当該エンジン22が制御される(ステップS250)。これにより、シフトポジションSPがNポジションに設定された状態でエンジン22が始動された後に、当該エンジン22をより適正に作動させると共に、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨を運転者により的確に認識させることが可能となる。
【0047】
加えて、実施例のハイブリッド自動車20では、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中にアクセル開度Accが閾値A0以上となったときに、エンジン始動禁止フラグFsdが値0に設定されている(機関始動禁止条件が成立している)場合には、エンジン22が始動されず、シフトポジションSPがNポジションに設定された状態でアクセル操作がなされている旨の警告メッセージが所定の表示部に表示される(ステップS200)。これにより、シフトポジションSPがNポジションに設定されると共にエンジン22の運転が停止されている最中に運転者によるアクセル開度Accが閾値A0以上となったときにエンジン22を始動させることができない場合であっても、シフトポジションSPがNポジションに設定されている最中にアクセル操作がなされた旨を運転者に認識させることが可能となる。
【0048】
引き続き、図3から図7を参照しながら、シフトポジションSPがNポジションからDポジション(走行ポジション)に切り替えられたときのハイブリッド自動車20の動作について説明する。図3は、運転者によりシフトポジションSPとしてDポジションが設定されているときにハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行される駆動制御ルーチンの一例を示すフローチャートである。
【0049】
図3の駆動制御ルーチンの開始に際して、ハイブリッドECU70のCPU72は、前回のシフトポジションSPや、アクセルペダルポジションセンサ84からのアクセル開度Acc、車速センサ87からの車速V、モータECU40からのモータMG1,MG2の回転数Nm1,Nm2、バッテリ50の充放電要求パワーPb*や出力制限Wout、ブレーキECU95からのVDIM解除フラグFvcanの値、VDIMフラグFvdimの値および制限トルクTlimといった制御に必要なデータの入力処理を実行する(ステップS300)。ここで、前回のシフトポジションSPは、ステップS300の処理の実行前におけるシフトポジションSPでありハイブリッドECU70の所定の記憶領域に格納されているものである。また、充放電要求パワーPb*やバッテリ50の入出力制限Win,Woutは、バッテリECU52から通信により入力するものとした。
【0050】
ステップS300のデータ入力処理の後、運転者によるアクセル開度Accや車速V等に基づいて駆動軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*を設定する(ステップS310)。ステップS310における目標トルクT*の設定処理の詳細を図4に示す。同図に示すように、目標トルクT*の設定に際しては、まずステップS300にて入力したアクセル開度Accと車速Vとに基づいて走行に要求される要求トルクTrqを設定する(ステップS3100)。実施例では、アクセル開度Accと車速Vと要求トルクTrqとの関係が予め定められて要求トルク設定用マップとしてROM74に記憶されており、要求トルクTrqとしては、与えられたアクセル開度Accと車速Vとに対応したものが当該マップから導出・設定される。図5に要求トルク設定用マップの一例を示す。次いで、VDIM解除フラグFvcanが値0であるか否か、すなわちVDIM解除スイッチ88を介して車両運動統合制御が解除されていないかどうかを判定し(ステップS3101)、VDIM解除フラグFvcanが値0であって車両運動統合制御が解除されていない場合には、通常時には値0に設定される所定のフラグF1が値0であるか否かを判定する(ステップS3102)。また、フラグF1が値0であれば、ステップS300にて入力した前回のシフトポジションSPがNポジションであるか否かを判定し(ステップS3103)、前回シフトポジションSPがNポジションではなくDポジションであれば(通常時であれば)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。また、ステップS3103にて例えばハイブリッド自動車20が停車しているときに運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられて本ルーチンが開始されたときのように前回のシフトポジションSPがNポジションであると判断された場合には、ステップS300にて入力したアクセル開度AccすなわちNポジションからDポジションへの切り替え時におけるアクセル開度Accが予め定められた閾値A2以上であるか否かを判定する(ステップS3104)。実施例では、閾値A2として例えば50〜60%といった比較的大きい正の値が用いられ、NポジションからDポジションへの切り替え時におけるアクセル開度Accが閾値A2未満であれば(通常時であれば)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。
【0051】
一方、ステップS3104にてアクセル開度Accが閾値A2以上であると判断された場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断された場合には、上記フラグF1を値1に設定すると共にステップS300にて入力したアクセル開度AccすなわちNポジションからDポジションへの切り替え時におけるアクセル開度Accに基づいて時定数τを設定する(ステップS3105)。時定数τは、値0〜値1の範囲内の値であり、実施例では、NポジションからDポジションへの切り替え時におけるアクセル開度Accと時定数τとの関係が予め実験・解析を経て図示しない時定数設定用マップとしてROM74に記憶されており、与えられたアクセル開度Accに対応したものが時定数τとして当該マップから導出・設定される。続いて、例えばステップS300にて入力したアクセル開度Accと前回のアクセル開度Accとの偏差を上限側および下限側の閾値と比較することにより、運転者によってアクセルペダル83が比較的大きく踏み増されたか、あるいは踏み戻されたか否かを判定し(ステップS3106)、アクセルペダル83の比較的大きな踏み増しまたは踏み戻しがなければ、ステップS3100にて設定した要求トルクTrqから前回の目標トルクT*(本ルーチンの初回実行時には値0)を減じた値であるトルク偏差が所定の閾値T0以下であるか否かを判定する(ステップS3107)。そして、当該トルク偏差が閾値T0を上回っている場合には、ステップS3100にて設定した要求トルクTrqと前回の目標トルクT*とステップS3105にて設定した時定数τとを用いた次式(3)に従うなまし処理を実行して目標トルクT*を設定する(ステップS3108)。これにより、実施例のハイブリッド自動車20では、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれている場合には、アクセルペダル83の比較的大きな踏み増しまたは踏み戻しがなく、かつ要求トルクTrqと前回の目標トルクT*との差が比較的大きい間、ステップS3110にて目標トルクT*が設定される通常時に比べて緩やかに変化するように目標トルクT*が設定されることになる。
【0052】
T* = τ・前回T* + (1-τ)・Trq …(3)
【0053】
上述のようにして、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断されてフラグF1が値1に設定されると、図3の駆動制御ルーチンの次回実行以降、ステップS3102にて否定判断がなされ、この場合には、ステップS3103〜S3105の処理がスキップされ、ステップS3106以降の処理が実行される。また、ステップS3108のなまし処理による目標トルクT*の設定が実行されるようになった後、ステップS3106にて運転者によりアクセルペダル83が比較的大きく踏み増されたか、あるいは踏み戻されたと判断された場合には、フラグF1を値0に設定した上で(ステップS3109)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。更に、ステップS3108のなまし処理による目標トルクT*の設定が実行されるようになった後、要求トルクTrqから前回の目標トルクT*を減じた値であるトルク偏差が閾値T0以下となった場合には、フラグF1を値0に設定した上で(ステップS3109)、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。加えて、ステップS3101にてVDIM解除フラグFvcanが値1であって車両運動統合制御が解除されていると判断された場合には、ステップS3100にて設定した要求トルクTrqを目標トルクT*として設定する(ステップS3110)。すなわち、運転者により車両運動統合制御が解除されている場合には、仮にNポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていたとしても、ステップS3100にて設定した要求トルクTrqが目標トルクT*として設定されることになる。
【0054】
さて、上述のようにして目標トルクT*を設定したならば、図3に示すように、VDIMフラグFvdimが値1であるか否かを判定する(ステップS320)。VDIMフラグFvdimが値1である場合には、ステップS300にてブレーキECU95により設定された制限トルクTlimを入力していることから、この場合には、ステップS310にて設定した目標トルクT*と制限トルクTlimとの小さい方を目標トルクT*として再設定する(ステップS330)。また、ステップS320にてVDIMフラグFvdimが値0であると判断された場合、ステップS330の処理はスキップされる。次いで、車両全体に要求される要求パワーP*を設定する(ステップS340)。実施例において、要求パワーP*は、目標トルクT*にリングギヤ軸32aの回転数Nrを乗じたものと充放電要求パワーPb*とロスLossとの総和として計算される。なお、リングギヤ軸32aの回転数Nrは、図示するようにモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除するか、あるいは車速Vに換算係数kを乗じることによっても得ることができる。要求パワーP*を設定したならば、エンジン22が運転されているか否か判定する(ステップS350)。そして、例えばシフトポジションSPがNポジションに設定されている最中にアクセル操作がなされてエンジン22が始動された場合のように、エンジン22が運転されている場合には、ステップS340にて設定した要求パワーP*が予め定められた閾値Pref未満であるか否かを判定する(ステップS360)。ステップS360にて要求パワーP*が閾値Pref未満であると判断された場合には、エンジンECU24に対してエンジン22が実質的にトルクを出力することなく所定回転数で自立運転されるようにするための自立運転指令を送信した上で(ステップS370)、モータMG1に対するトルク指令Tm1*を値0に設定する(ステップS380)。
【0055】
次いで、バッテリ50の出力制限Woutと、設定したモータMG1のトルク指令Tm1*と現在のモータMG1の回転数Nm1との積として得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で除することによりモータMG2から出力してもよいトルクの上限としてのトルク制限Tmaxを次式(4)に従い計算する(ステップS390)。更に、目標トルクT*とトルク指令Tm1*と動力分配統合機構30のギヤ比ρと減速ギヤ35のギヤ比Grとを用いてモータMG2から出力すべきトルクとしての仮モータトルクTm2tmpを次式(5)に従い計算し(ステップS400)、仮モータトルクTm2tmpをステップS390にて計算したトルク制限Tmaxで制限した値をモータMG2のトルク指令Tm2*として設定する(ステップS410)。このようにしてモータMG2のトルク指令Tm2*を設定することにより、車軸としてのリングギヤ軸32aに出力するトルクをバッテリ50の出力制限Woutの範囲内に制限した値に設定することができる。こうしてモータMG1およびMG2のトルク指令Tm1*およびTm2*を設定したならば、トルク指令Tm1*,Tm2*をモータECU40に送信し(ステップS420)、再度ステップS300以降の処理を実行する。トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。なお、式(5)は、図6に例示する動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図から容易に導出することができる。図6において、左側のS軸はモータMG1の回転数Nm1に一致するサンギヤ31の回転数を示し、中央のC軸はエンジン22の回転数Neに一致するキャリア34の回転数を示し、右側のR軸はモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除したリングギヤ32の回転数Nrを示す。また、R軸上の2つの太線矢印は、モータMG1からトルクTm1を出力したときにこのトルク出力によりリングギヤ軸32aに作用するトルクと、モータMG2から出力されるトルクTm2が減速ギヤ35を介してリングギヤ軸32aに作用するトルクとを示す。
【0056】
Tmax = (Wout-Tm1*・Nm1)/Nm2 …(4)
Tm2tmp = (Tr*+Tm1*/ρ)/Gr …(5)
【0057】
また、ステップS360にて要求パワーP*が閾値Pref以上であると判断された場合には、要求パワーP*をエンジン22に出力させるべく要求パワーP*に基づいてエンジン22の目標回転数Ne*と目標トルクTe*とを設定し、設定した目標回転数Ne*と目標トルクTe*とをエンジンECU24に送信する(ステップS430)。実施例では、予め定められたエンジン22を効率よく作動させるための動作ラインと要求パワーP*とに基づいてエンジン22の目標回転数Ne*と目標トルクTe*とを設定するものとした。図7に、エンジン22の動作ラインと目標回転数Ne*と目標トルクTe*との相関曲線とを例示する。同図に示すように、目標回転数Ne*と目標トルクTe*は、動作ラインと要求パワーP*(Ne*×Te*)が一定となることを示す相関曲線との交点から求めることができる。こうしてエンジン22の目標回転数Ne*と目標トルクTe*とを設定したならば、ステップS430にて設定した目標回転数Ne*とリングギヤ軸32aの回転数Nr(Nm2/Gr)と動力分配統合機構30のギヤ比ρ(サンギヤ31の歯数/リングギヤ32の歯数)とを用いて次式(6)に従いモータMG1の目標回転数Nm1*を計算した上で、計算した目標回転数Nm1*と現在の回転数Nm1とに基づく次式(7)の計算を実行してモータMG1のトルク指令Tm1*を設定する(ステップS440)。モータMG1の目標回転数Nm1*を求めるための式(6)は、図6の共線図における回転数の関係を用いれば容易に導出することができる。また、式(7)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(7)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。こうしてモータMG1のトルク指令Tm1*を設定したならば、上述のステップS390からS420の処理を実行した上で、再度ステップS300以降の処理を実行する。一方、ステップS350にてエンジン22の運転が停止されていると判断された場合には、ステップS380にてモータMG1のトルク指令Tm1*を値0に設定した上で、上述のステップS390からS420の処理を実行し、再度ステップS300以降の処理を実行する。
【0058】
Nm1* = Ne*・(1+ρ)/ρ-Nm2/(Gr・ρ) …(6)
Tm1* = -ρ/(1+ρ)・Te*+k1・(Nm1*-Nm1)+k2・∫(Nm1*-Nm1)dt …(7)
【0059】
ここまで説明したように、実施例のハイブリッド自動車20では、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際に運転者によるアクセル開度Accが閾値A2以上であることを含む条件が成立しない通常時には、アクセル開度Accに基づいて駆動軸としてのリングギヤ軸32aに出力するトルクの目標値である目標トルクT*が設定されると共に(図3のステップS310、図4のステップS3100,S3110)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される(図3のS320〜S440)。また、運転者によりシフトポジションSPがNポジションからDポジションへと切り替えられる際に上記条件が成立したときには、所定の解除条件(図4のステップS3106,S3107)が成立するまで、アクセル開度Accに応じた要求トルクTrqと緩変化制約としての時定数τおよび上記式(3)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定されると共に(図4のステップS3108)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御される(図3のS320〜S440)。これにより、シフトポジションSPがNポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダル83を踏み込んだままシフトポジションSPをNポジションからDポジションへと切り替えたとしても、ハイブリッド自動車20を急発進(急加速)させることなくスムースに走行させることができる。従って、上記実施例では、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。
【0060】
また、実施例のハイブリッド自動車20は、駆動輪39a,39bの空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、車両運動統合制御を実行して挙動不安定状態を解消するためにリングギヤ軸32aに出力すべきトルクである制限トルクTlimをハイブリッドECU70を出力するブレーキECU95と、ブレーキECU95による車両運動統合制御の解除を運転者に許容するVDIM解除スイッチ88とを有している。そして、ハイブリッド自動車20では、VDIM解除スイッチ88を介してブレーキECU95による車両運動統合制御が解除されている場合には、シフトポジションSPがNポジションからDポジションへと切り替えられる際に運転者によるアクセル開度Accが閾値A2以上であるか否かに拘わらず、通常時と同様にアクセル開度Accに応じた要求トルクTrqが目標トルクT*として設定される(図4のステップS3100,S3101,S3110)。すなわち、ブレーキECU95による車両運動統合制御が解除された場合、ハイブリッド自動車20の挙動が多少不安定になることを運転者が容認しているとみなすことができる。従って、運転者により車両運動統合制御が解除されている場合、通常時と同様にアクセル開度Accに基づいて目標トルクT*が設定されるようにすれば、運転者の意図に即しながらハイブリッド自動車20を比較的急峻に発進(加速)させることも可能となる。
【0061】
更に、上記実施例では、アクセル開度Accに基づいて走行に要求される要求トルクTrqが設定され(図4のステップS3100)、通常時には、要求トルクTrqがそのまま目標トルクT*として設定されると共に(図4のステップS3110)、上記条件成立時には、要求トルクTrqと緩変化制約としての時定数τおよび上記式(3)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定される(図4のステップS3108)。これにより、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0062】
ただし、図3のステップS310における目標トルクT*の設定処理は、図8に示すような処理とされてもよい。図8に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3101〜S3104と同様のステップS3111〜S3114の処理を実行し、ステップS3114にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと時定数τ′との関係を規定する図示しない時定数設定用マップからステップS300にて入力したアクセル開度Accに対応した時定数τ′を導出・設定する(S3115)。次いで、図4のステップS3106と同様のステップS3116の処理と、ステップS300にて入力したアクセル開度Accから前回の実行用アクセル開度Acc*(初期値0)を減じた値であるアクセル開度偏差が予め定められた閾値α以下であるか否かの判定処理(ステップS3117)とを実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつアクセル開度偏差が閾値αを上回っていれば、アクセル開度Accと緩変化制約としてのステップS3115にて設定される時定数τ′と次式(8)とに基づいて実行用アクセル開度Acc*を通常時に比べて緩やかに変化するように設定する(ステップS3118)。これに対して、ステップS3113やステップS3114において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3116,S3119)、アクセル開度偏差が閾値α以下になったとき(ステップS3117,S3119)、更には運転者により車両運動統合制御が解除されているとき(ステップS3111)には、ステップS300にて入力されたアクセル開度Accがそのまま実行用アクセル開度Acc*として設定される(S3120)。こうして実行用アクセル開度Acc*が設定されると、図5の要求トルク設定用マップと同様のマップから当該実行用アクセル開度Acc*と車速Vとに対応した目標トルクT*が導出・設定され(ステップS3121)、当該目標トルクT*に基づく走行用のトルクが得られるようにエンジン22とモータMG1およびMG2とが制御されることになる。このように、運転者によるアクセル開度Accと緩変化制約としての時定数τ′と式(8)とに基づいて実行用アクセル開度Acc*を通常時に比べて緩やか変化させると共に、実行用アクセル開度Acc*に基づいて目標トルクT*を設定しても、当該目標トルクT*をより適正に緩変化させることが可能となる。また、このように実行用アクセル開度Acc*を緩変化させる場合、緩変化処理の解除条件は、図示するように、通常時等と同様にして設定される実行用アクセル開度Acc*に一致するステップS300にて入力されるアクセル開度Accと前回の実行用アクセル開度Acc*とがある程度近づいたときに成立するもの(ステップS3117)を含むと好ましい。
【0063】
Acc* = τ′・前回Acc* + (1-τ′)・Acc …(8)
【0064】
また、上述のように時定数τまたはτ′を用いたなまし処理により目標トルクT*または実行用アクセル開度Acc*を緩変化させる代わりに、図9および図10に示すように、目標トルクT*または実行用アクセル開度Acc*を増加側および減少側の許容変化量である上下限レートdTまたはdAを用いたレート処理により緩変化させてもよい。図9に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3100〜S3104と同様のステップS3130〜S3134の処理を実行し、ステップS3134にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと上下限レートdTとの関係を規定する図示しない上下限レート設定用マップからステップS300にて入力したアクセル開度Accに対応した上下限レートdTを導出・設定する(S3135)。次いで、図4のステップS3106およびS3107と同様のステップS3136およびS3137の処理を実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつ要求トルクTrqから前回の目標トルクT*を減じた値であるトルク偏差が閾値T0を上回っていれば、ステップS3130にて入力した要求トルクTrqと前回の目標トルクT*とステップS3135にて設定した上下限レートdTとを用いた次式(9)に従うレート処理により目標トルクT*を設定する(ステップS3138)。これに対して、ステップS3133やステップS3134において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3136,S3139)、トルク偏差が閾値T0以下になったとき(ステップS3137,S3139)、更には運転者により車両運動統合制御が解除されているとき(ステップS3131)には、ステップS3100にて設定された要求トルクTrqがそのまま目標トルクT*として設定される(ステップS3140)。このように、要求トルクTrqと緩変化制約としての上下限レートdTおよび式(9)とに基づいて目標トルクT*が通常時に比べて緩やかに変化するように設定しても、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0065】
T* = min(max(Trq, 前回T*-dT), 前回T*+dT) …(9)
【0066】
一方、図10に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図8のステップS3111〜S3114と同様のステップS3141〜S3144の処理を実行し、ステップS3144にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共に、NポジションからDポジションへの切り替え時におけるアクセル開度Accと上下限レートdAとの関係を規定する図示しない上下限レート設定用マップからステップS300にて入力したアクセル開度Accに対応した上下限レートdAを導出・設定する(S3145)。次いで、図8のステップS3116およびS3117と同様のステップS3146およびS3147の処理を実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつアクセル開度Accから前回の実行用アクセル開度Accを減じた値であるアクセル開度偏差が閾値αを上回っていれば、ステップS300にて入力したアクセル開度Accと前回の実行用アクセル開度Acc*とステップS3145にて設定した上下限レートdAとを用いた次式(10)に従うレート処理により実行用アクセル開度Acc*を設定する(ステップS3148)。これに対して、ステップS3143やステップS3144において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3146,S3149)、アクセル開度偏差が閾値α以下になったとき(ステップS3147,S3149)、更には運転者により車両運動統合制御が解除されているとき(ステップS3141)には、ステップS300にて入力されたアクセル開度Accがそのまま実行用アクセル開度Acc*として設定される(ステップS3150)。そして、ステップS3148またはS3150にて実行用アクセル開度Acc*が設定されると、図5の要求トルク設定用マップと同様のマップから当該実行用アクセル開度Acc*と車速Vとに対応した目標トルクT*が導出・設定される(ステップS3151)。このように、アクセル開度Accと緩変化制約としての上下限レートdAおよび式(10)とに基づいて実行用アクセル開度Accが通常時に比べて緩やかに変化するように設定しても、目標トルクT*をより適正に緩変化させ、アクセルペダル83が踏み込まれたままシフトポジションSPがNポジションからDポジションへと切り替えられたときのハイブリッド自動車20の挙動をより安定化させることが可能となる。
【0067】
Acc* = min(max(Acc, 前回Acc*-dA), 前回Acc*+dA) …(10)
【0068】
図11は、更に他の目標トルクT*の設定処理を例示するフローチャートである。図11に示す目標トルクT*の設定処理の実行に際して、ハイブリッドECU70のCPU72は、まず、図4のステップS3100〜S3104と同様のステップS3160〜S3164の処理を実行し、ステップS3164にてアクセル開度Accが閾値A2以上であると判断した場合、すなわち、NポジションからDポジションへの切り替え時に運転者により比較的大きくアクセルペダル83が踏み込まれていると判断した場合には、フラグF1を値1に設定すると共にタイマ78をオンし、更にNポジションからDポジションへの切り替え時におけるアクセル開度Accと目標トルクT*の上限値である上限ガード値Tulとの関係を規定する図示しない上限ガード値設定用マップからステップS300にて入力したアクセル開度Accに対応した上限ガード値Tulを導出・設定する(S3165)。次いで、図4のステップS3106と同様のステップS3166の処理と、タイマ78の計時時間tが所定時間tref以上であるか否かの判定処理(ステップS3167)とを実行し、アクセルペダル83の踏み増しや踏み戻しがなく、かつ計時時間tが所定時間tref未満であれば、ステップS3160にて設定された要求トルクTrqとステップS3165にて設定された上限ガード値Tulとの小さい方を目標トルクT*として設定する(ステップS3168)。これに対して、ステップS3163やステップS3164において否定判断がなされる通常時や、運転者によりアクセルペダル83の踏み増しまたは踏み戻しがなされたとき(ステップS3166,S3169)、タイマ78の計時時間tが所定時間tref以上になったとき(ステップS3167,S3169)、更には運転者により車両運動統合制御が解除されているとき(ステップS3161)には、ステップS3100にて設定された要求トルクTrqがそのまま目標トルクT*として設定される(ステップS3170)。このように、NポジションからDポジションへの切り替え時のアクセル開度Accに応じた目標トルクT*の上限値である上限ガード値Tulを用いて目標トルクT*を制限することで、シフトポジションSPがNポジションに設定されている状態で運転者が意図的にあるいは誤ってアクセルペダルを踏み込んだままシフトポジションSPをNポジションからDポジションへと切り替えたとしても、ハイブリッド自動車20が急発進あるいは急加速してしまうことを抑制することができる。従って、図11の目標トルクT*の設定処理を採用しても、シフトポジションSPがNポジションに設定された状態で運転者によるアクセル操作やシフト操作がなされたときに、ハイブリッド自動車20をより適正に制御することが可能となる。また、このような上限ガード値Tulを用いた上限制限処理を実行する場合、当該上限制限処理の解除条件は、図示するように上限制限処理を実行した時間tが所定時間trefに達したときに成立するものを含むと好ましい。また、図11の例のように、目標トルクT*の上限値である上限ガード値Tulを用いて目標トルクT*を制限する代わりに、図12に例示するように、実行用アクセル開度Acc*の上限値である上下限ガード値Aulを用いて目標トルクT*を制限してもよい。図12の目標トルクT*の設定処理では、NポジションからDポジションへの切り替え時におけるアクセル開度Accとアクセル開度Accの上限値である上限ガード値Aulとの関係を規定する図示しない上限ガード値設定用マップからステップS300にて入力したアクセル開度Accに対応した上限ガード値Aulを導出・設定し(ステップS3175)、アクセルペダル83の踏み増しや踏み戻しがなく(ステップS3176)、かつ計時時間tが所定時間tref未満であれば(ステップS3177)、ステップS300にて入力したアクセル開度AccとステップS3175にて設定された上限ガード値Aulとの小さい方を実行用アクセル開度Acc*として設定する(ステップS3178)。ただし、図12において、ステップS3171〜S3174およびS3179は、図11のステップS3161〜S3164およびS3169と同様の処理であり、ステップS3180およびS3181は、図8のステップS3120およびS3121等と同様の処理である。
【0069】
なお、上記実施例では、シフトポジションSPがNポジションからDポジションに切り替えられたときに図3の駆動制御ルーチンや図4、図8〜図12の目標トルクT*の設定処理が実行されることになるが、シフトポジションSPがNポジションから走行ポジションであるBポジションやRポジションに切り替えられたときにも図3の駆動制御ルーチンや図4、図8〜図12の目標トルクT*の設定処理と同様の制御が実行されてもよいことはいうまでもない。また、上記実施例のハイブリッド自動車20では、車軸としてのリングギヤ軸32aとモータMG2とがモータMG2の回転数を減速してリングギヤ軸32aに伝達する減速ギヤ35を介して連結されているが、減速ギヤ35の代わりに、例えばHi,Loの2段の変速段あるいは3段以上の変速段を有したモータMG2の回転数を変速してリングギヤ軸32aに伝達する変速機を採用してもよい。更に、実施例のハイブリッド自動車20は、モータMG2の動力をリングギヤ軸32aに接続された車軸に出力するものであるが、本発明の適用対象はこれに限られるものでもない。すなわち、本発明は、図13に示す変形例としてのハイブリッド自動車120のように、モータMG2の動力をリングギヤ軸32aに接続された車軸(車輪39a,39bが接続された車軸)とは異なる車軸(図13における車輪39c,39dに接続された車軸)に出力するものに適用されてもよい。また、実施例のハイブリッド自動車20は、エンジン22の動力を動力分配統合機構30を介して車輪39a,39bに接続される車軸としてのリングギヤ軸32aに出力するものであるが、本発明の適用対象は、これに限られるものでもない。すなわち、本発明は、図14に示す変形例としてのハイブリッド自動車220のように、エンジン22のクランクシャフトに接続されたインナーロータ232と車輪39a,39bに動力を出力する車軸に接続されたアウターロータ234とを有し、エンジン22の動力の一部を車軸に伝達すると共に残余の動力を電力に変換する対ロータ電動機230を備えたものに適用されてもよい。
【0070】
ここで、上記実施例および変形例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明しておく。すなわち、上記実施例等においては、エンジン22が「内燃機関」に相当し、モータMG2が「電動機」に相当し、モータMG2と電力をやり取り可能なバッテリ50が「蓄電手段」に相当し、シフトレバー81が「シフトポジション選択手段」に相当し、アクセルペダルポジションセンサ84が「アクセル操作量取得手段」に相当し、図4および図8から図11の目標トルクT*の設定処理を実行するハイブリッドECU70が「目標駆動力設定手段」に相当し、図3の駆動制御ルーチンを実行するハイブリッドECU70、エンジンECU24およびモータECU40の組み合わせが「制御手段」に相当する。また、車両運動統合制御を実行可能なブレーキECU95が「制限駆動力設定手段」に相当し、VDIM解除スイッチ88が「制限駆動力設定解除手段」に相当し、モータMG1および動力分配統合機構30や対ロータ電動機230が「電力動力入出力手段」に相当し、モータMG1や対ロータ電動機230が「発電用電動機」に相当し、動力分配統合機構30が「3軸式動力入出力手段」に相当する。更に、モータMG1が「モータリング手段」に相当し、図2のNポジション時制御ルーチンを実行するハイブリッドECU70、エンジンECU24およびモータECU40の組み合わせが「ニュートラル時制御手段」に相当する。
【0071】
ただし、「内燃機関」は、ガソリンや軽油といった炭化水素系の燃料の供給を受けて動力を出力するエンジン22に限られず、水素エンジンといったような他の如何なる形式のものであっても構わない。「電動機」や「発電用電動機」は、モータMG1,MG2のような同期発電電動機に限られず、誘導電動機といったような他の如何なる形式のものであっても構わない。「蓄電手段」は、バッテリ50のような二次電池に限られず、電動機と電力をやり取り可能なものであればキャパシタといったような他の如何なる形式のものであっても構わない。「アクセル操作量取得手段」は、運転者によるアクセル操作量を取得可能なものであれば、如何なる形式のものであっても構わない。「制御手段」や「ニュートラル時制御手段」は、ハイブリッドECU70とエンジンECU24とモータECU40との組み合わせ以外の他の如何なる形式のものであっても構わない。何れにしても、これら実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための最良の形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載した発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0072】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において、様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0073】
本発明は、ハイブリッド自動車の製造産業等において利用可能である。
【図面の簡単な説明】
【0074】
【図1】本発明の実施例に係るハイブリッド自動車20の概略構成図である。
【図2】ハイブリッドECU70により実行されるNポジション時制御ルーチンの一例を示すフローチャートである。
【図3】ハイブリッドECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図4】目標トルクT*の設定処理の一例を示す説明図である。
【図5】要求トルク設定用マップの一例を示す説明図である。
【図6】動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図を例示する説明図である。
【図7】エンジン22の動作ラインと目標回転数Ne*と目標トルクTe*との相関曲線とを例示する説明図である。
【図8】目標トルクT*の設定処理の他の例を示す説明図である。
【図9】目標トルクT*の設定処理の更に他の例を示す説明図である。
【図10】目標トルクT*の設定処理の他の例を示す説明図である。
【図11】目標トルクT*の設定処理の更に他の例を示す説明図である。
【図12】目標トルクT*の設定処理の他の例を示す説明図である。
【図13】変形例に係るハイブリッド自動車120の概略構成図である。
【図14】他の変形例に係るハイブリッド自動車220の概略構成図である。
【符号の説明】
【0075】
20,120,220 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 キャリア、35 減速ギヤ、37 ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、39c,39d 車輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、51 温度センサ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、72 CPU、74 ROM、76 RAM、78 タイマ、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルストロークセンサ、87 車速センサ、88 VDIM解除スイッチ、89a〜89d 車輪速センサ、90 ブレーキユニット、91 マスタシリンダ、92 ブレーキアクチュエータ、93a〜93d ホイールシリンダ、95 ブレーキ用電子制御ユニット(ブレーキECU)、230 対ロータ電動機、232 インナーロータ、234 アウターロータ、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記取得されたアクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項2】
請求項1に記載のハイブリッド自動車において、
前記目標駆動力設定手段は、前記取得されたアクセル操作量に基づいて走行に要求される要求駆動力を設定すると共に、前記通常時には、前記設定された要求駆動力に基づいて走行用の動力の目標値である目標駆動力を設定し、前記条件成立時には、前記設定された要求駆動力と前記緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するハイブリッド自動車。
【請求項3】
請求項1に記載のハイブリッド自動車において、
前記目標駆動力設定手段は、前記通常時には、前記取得されたアクセル操作量を実行用アクセル操作量として設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定し、前記条件成立時には、前記取得されたアクセル操作量と前記緩変化制約とに基づいて前記実行用アクセル操作量を前記通常時に比べて緩やかに変化するように設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定するハイブリッド自動車。
【請求項4】
請求項1から3の何れか一項に記載のハイブリッド自動車において、
前記所定の緩変化制約は、時定数を用いたなまし処理により前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量を緩変化させる制約であるハイブリッド自動車。
【請求項5】
請求項1から3の何れか一項に記載のハイブリッド自動車において、
前記所定の緩変化制約は、前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量の少なくとも増加側の許容変化量である上限レートを用いたレート処理により前記目標駆動力を緩変化させる制約であるハイブリッド自動車。
【請求項6】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項7】
請求項1から6の何れか一項に記載のハイブリッド自動車において、
駆動輪の空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、走行用の動力の前記挙動不安定状態を解消するための目標値である制限駆動力を設定する制限駆動力設定手段と、
前記制限駆動力設定手段による前記制限駆動力の設定の解除を運転者に許容する制限駆動力設定解除手段とを更に備え、
前記目標駆動力設定手段は、前記制限駆動力設定手段による前記制限駆動力の設定が解除されている場合には、前記所定条件の成立の有無に拘わらず前記通常時と同様に前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定するハイブリッド自動車。
【請求項8】
請求項1から7の何れか一項に記載のハイブリッド自動車において、
所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段を更に備え、
前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であるハイブリッド自動車。
【請求項9】
請求項8に記載のハイブリッド自動車において、
前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むハイブリッド自動車。
【請求項10】
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するニュートラル時制御手段と、
を備えるハイブリッド自動車。
【請求項11】
請求項10に記載のハイブリッド自動車において、
前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に該内燃機関が始動された後、前記取得されたアクセル操作量が所定の閾値未満である場合には、前記内燃機関が自立運転されるように該内燃機関を制御し、前記取得されたアクセル操作量が前記所定の閾値以上である場合には、前記内燃機関の回転数が前記取得されたアクセル操作量に応じた値となるように該内燃機関と前記モータリング手段とを制御するハイブリッド自動車。
【請求項12】
請求項10または11に記載のハイブリッド自動車において、
前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、所定の機関始動禁止条件が成立している場合には、前記内燃機関を始動させることなく、前記シフトポジションが前記ニュートラルポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するハイブリッド自動車。
【請求項13】
請求項10から12の何れか一項に記載のハイブリッド自動車において、
前記モータリング手段は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段であり、
前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であるハイブリッド自動車。
【請求項14】
請求項13に記載のハイブリッド自動車において、
前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むハイブリッド自動車。
【請求項15】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記アクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むハイブリッド自動車の制御方法。
【請求項16】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記アクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むハイブリッド自動車の制御方法。
【請求項17】
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するステップ、
を含むハイブリッド自動車の制御方法。
【請求項1】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記取得されたアクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項2】
請求項1に記載のハイブリッド自動車において、
前記目標駆動力設定手段は、前記取得されたアクセル操作量に基づいて走行に要求される要求駆動力を設定すると共に、前記通常時には、前記設定された要求駆動力に基づいて走行用の動力の目標値である目標駆動力を設定し、前記条件成立時には、前記設定された要求駆動力と前記緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するハイブリッド自動車。
【請求項3】
請求項1に記載のハイブリッド自動車において、
前記目標駆動力設定手段は、前記通常時には、前記取得されたアクセル操作量を実行用アクセル操作量として設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定し、前記条件成立時には、前記取得されたアクセル操作量と前記緩変化制約とに基づいて前記実行用アクセル操作量を前記通常時に比べて緩やかに変化するように設定すると共に該設定された実行用アクセル操作量に基づいて前記目標駆動力を設定するハイブリッド自動車。
【請求項4】
請求項1から3の何れか一項に記載のハイブリッド自動車において、
前記所定の緩変化制約は、時定数を用いたなまし処理により前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量を緩変化させる制約であるハイブリッド自動車。
【請求項5】
請求項1から3の何れか一項に記載のハイブリッド自動車において、
前記所定の緩変化制約は、前記目標駆動力または該目標駆動力の設定に用いられる運転者によるアクセル操作量に対応した実行用アクセル操作量の少なくとも増加側の許容変化量である上限レートを用いたレート処理により前記目標駆動力を緩変化させる制約であるハイブリッド自動車。
【請求項6】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記取得されたアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記取得されたアクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定する目標駆動力設定手段と、
前記設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項7】
請求項1から6の何れか一項に記載のハイブリッド自動車において、
駆動輪の空転によるスリップが発生している状態を少なくとも含む挙動不安定状態にあるときに、走行用の動力の前記挙動不安定状態を解消するための目標値である制限駆動力を設定する制限駆動力設定手段と、
前記制限駆動力設定手段による前記制限駆動力の設定の解除を運転者に許容する制限駆動力設定解除手段とを更に備え、
前記目標駆動力設定手段は、前記制限駆動力設定手段による前記制限駆動力の設定が解除されている場合には、前記所定条件の成立の有無に拘わらず前記通常時と同様に前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定するハイブリッド自動車。
【請求項8】
請求項1から7の何れか一項に記載のハイブリッド自動車において、
所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段を更に備え、
前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であるハイブリッド自動車。
【請求項9】
請求項8に記載のハイブリッド自動車において、
前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むハイブリッド自動車。
【請求項10】
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段とを有するハイブリッド自動車であって、
ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段と、
運転者によるアクセル操作量を取得するアクセル操作量取得手段と、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するニュートラル時制御手段と、
を備えるハイブリッド自動車。
【請求項11】
請求項10に記載のハイブリッド自動車において、
前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に該内燃機関が始動された後、前記取得されたアクセル操作量が所定の閾値未満である場合には、前記内燃機関が自立運転されるように該内燃機関を制御し、前記取得されたアクセル操作量が前記所定の閾値以上である場合には、前記内燃機関の回転数が前記取得されたアクセル操作量に応じた値となるように該内燃機関と前記モータリング手段とを制御するハイブリッド自動車。
【請求項12】
請求項10または11に記載のハイブリッド自動車において、
前記ニュートラル時制御手段は、前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に前記取得されたアクセル操作量が所定量以上となったときに、所定の機関始動禁止条件が成立している場合には、前記内燃機関を始動させることなく、前記シフトポジションが前記ニュートラルポジションに設定された状態でアクセル操作がなされている旨を運転者に報知するハイブリッド自動車。
【請求項13】
請求項10から12の何れか一項に記載のハイブリッド自動車において、
前記モータリング手段は、所定の車軸と前記内燃機関の機関軸とに接続されて電力と動力との入出力を伴って前記内燃機関の動力の少なくとも一部を前記車軸側に出力すると共に前記蓄電手段と電力をやり取り可能な電力動力入出力手段であり、
前記電動機は、前記車軸または該車軸とは異なる他の車軸に動力を入出力可能であるハイブリッド自動車。
【請求項14】
請求項13に記載のハイブリッド自動車において、
前記電力動力入出力手段は、動力を入出力可能であると共に前記蓄電手段と電力をやり取りすることができる発電用電動機と、前記車軸と前記内燃機関の前記機関軸と前記発電用電動機の回転軸との3軸に接続され、これら3軸のうちの何れか2軸に入出力される動力に基づく動力を残余の軸に入出力する3軸式動力入出力手段とを含むハイブリッド自動車。
【請求項15】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に運転者によるアクセル操作量が所定量以上であることを含む所定条件が成立しない通常時には、前記アクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記所定条件が成立する条件成立時には、所定の解除条件が成立するまで、前記アクセル操作量と所定の緩変化制約とに基づいて前記目標駆動力を前記通常時に比べて緩やかに変化するように設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むハイブリッド自動車の制御方法。
【請求項16】
走行用の動力を出力可能な内燃機関と、走行用の動力を出力可能な電動機と、該電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
(a)運転者によるアクセル操作量に基づいて走行用の動力の目標値である目標駆動力を設定すると共に、運転者により前記シフトポジションが前記ニュートラルポジションから前記走行ポジションへと切り替えられる際に前記アクセル操作量が所定量以上であることを含む所定条件が成立した場合には、所定の解除条件が成立するまで、前記ニュートラルポジションから前記走行ポジションへの切り替え時のアクセル操作量に応じた前記目標駆動力または前記アクセル操作量の上限値を用いた上限制限処理を伴って前記目標駆動力を設定するステップと、
(b)ステップ(a)にて設定された目標駆動力に基づく走行用の動力が得られるように前記内燃機関と前記電動機とを制御するステップと、
を含むハイブリッド自動車の制御方法。
【請求項17】
走行用の動力を出力可能な内燃機関と、前記内燃機関をモータリング可能なモータリング手段と、走行用の動力を出力可能な電動機と、前記モータリング手段および前記電動機と電力をやり取り可能な蓄電手段と、ニュートラルポジションと走行ポジションとの選択を運転者に許容するシフトポジション選択手段とを備えるハイブリッド自動車の制御方法であって、
前記シフトポジションが前記ニュートラルポジションに設定されると共に前記内燃機関の運転が停止されている最中に運転者によるアクセル操作量が所定量以上となったときに、前記モータリング手段によるモータリングを伴って前記内燃機関が始動されるように前記内燃機関と前記モータリング手段とを制御するステップ、
を含むハイブリッド自動車の制御方法。
【図1】


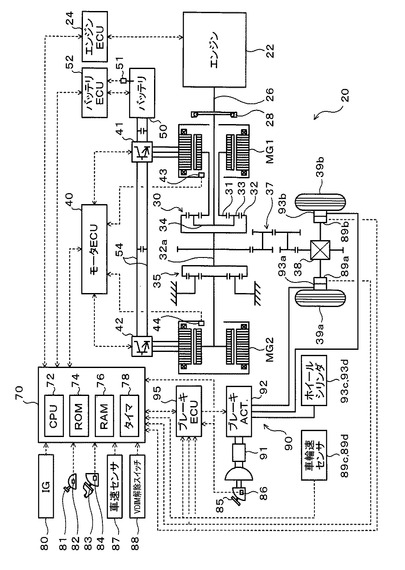
【図2】
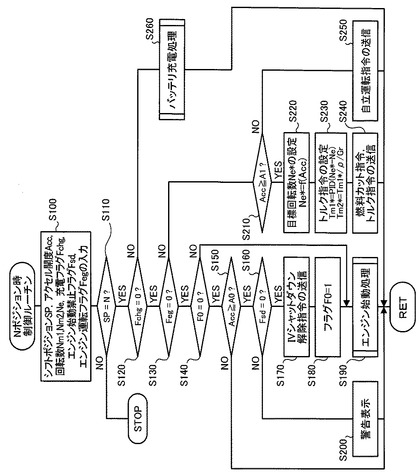
【図3】
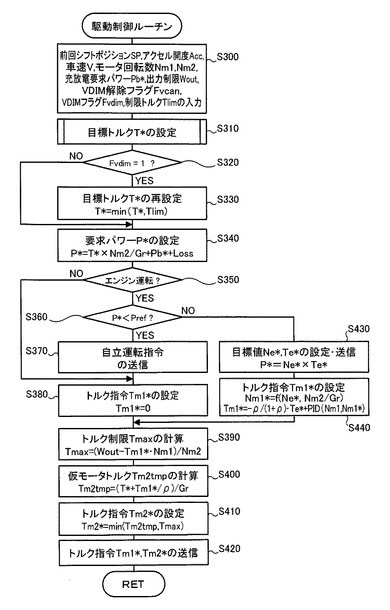
【図4】
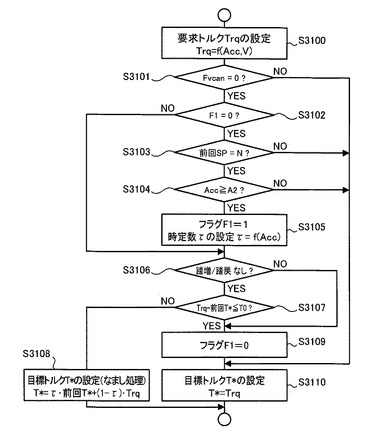
【図5】
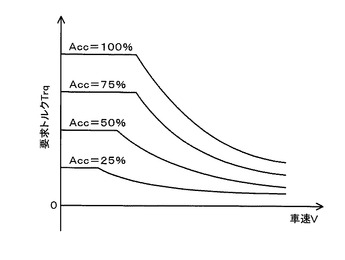
【図6】
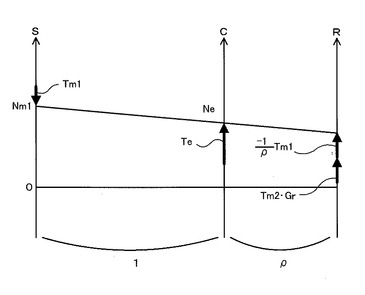
【図7】
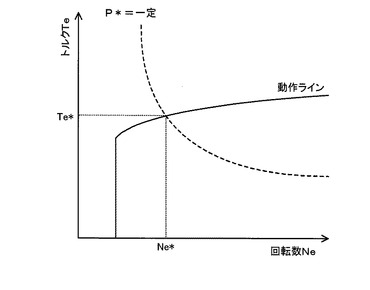
【図8】
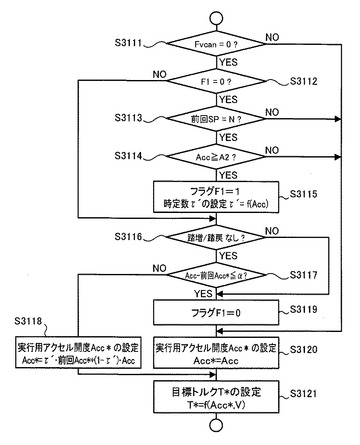
【図9】
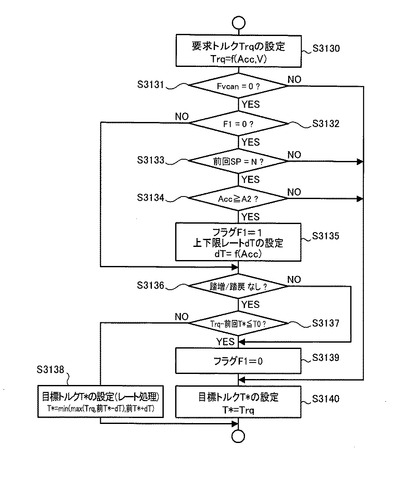
【図10】
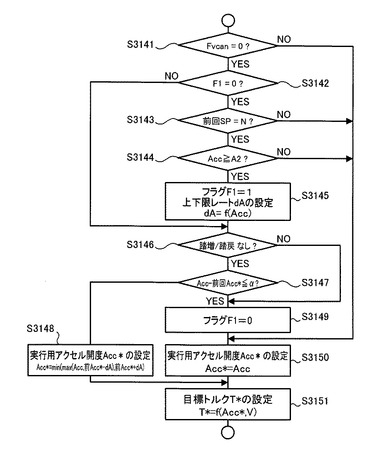
【図11】
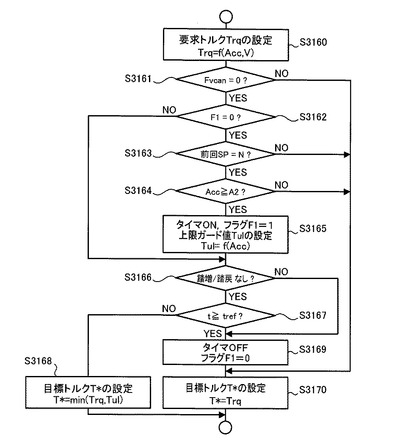
【図12】
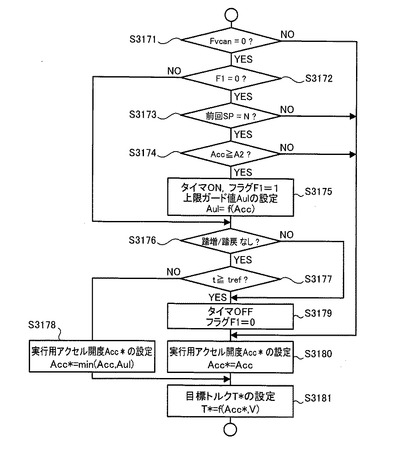
【図13】
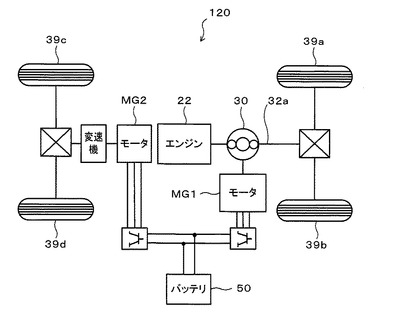
【図14】
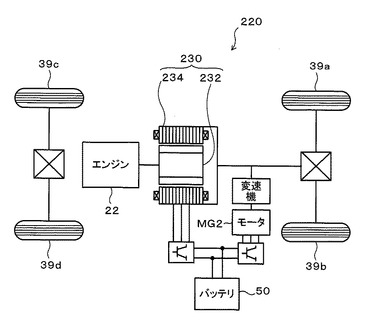
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−18174(P2010−18174A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−180915(P2008−180915)
【出願日】平成20年7月11日(2008.7.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月11日(2008.7.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]