
ハイブリッド自動車の制御装置
【課題】変速機の機構に負担を負わせることなく、速やかにPTO装置の作動を開始する。
【解決手段】デュアルクラッチ式変速機2と、第1歯車機構21Aの第1入力軸に第1主クラッチ3Aを介し第2歯車機構22Aの第2入力軸に第2主クラッチ3Bを介して接続されるエンジン1と、第2入力軸に装備されたモータ4と、PTOクラッチ11を介して第2歯車機構に接続されたPTO装置10と、第1入力軸と連結される第1歯車機構の第1のカウンタ軸と、第2入力軸と連結される第2歯車機構の第2のカウンタ軸と、をそなえ、変速機2に、出力クラッチと、第1及び第2のカウンタ軸を連結可能なクラッチとが備えられ、制御手段100が、PTOクラッチの接続指示がなされたら、第1及び第2主クラッチ及び出力クラッチを遮断してから、回転数がゼロとなるようにモータに停止指示をし、第2のカウンタ軸回転数がゼロとなったらPTOクラッチ11を接続する。
【解決手段】デュアルクラッチ式変速機2と、第1歯車機構21Aの第1入力軸に第1主クラッチ3Aを介し第2歯車機構22Aの第2入力軸に第2主クラッチ3Bを介して接続されるエンジン1と、第2入力軸に装備されたモータ4と、PTOクラッチ11を介して第2歯車機構に接続されたPTO装置10と、第1入力軸と連結される第1歯車機構の第1のカウンタ軸と、第2入力軸と連結される第2歯車機構の第2のカウンタ軸と、をそなえ、変速機2に、出力クラッチと、第1及び第2のカウンタ軸を連結可能なクラッチとが備えられ、制御手段100が、PTOクラッチの接続指示がなされたら、第1及び第2主クラッチ及び出力クラッチを遮断してから、回転数がゼロとなるようにモータに停止指示をし、第2のカウンタ軸回転数がゼロとなったらPTOクラッチ11を接続する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、デュアルクラッチ式の自動変速機とパワーテイクオフ装置(PTO)とをそなえたハイブリッド自動車の制御装置に関するものである。
【背景技術】
【0002】
近年、エンジン(内燃機関)及びモータ(電動発電機)の駆動力を任意に駆動輪に伝達可能なパラレル型ハイブリッド自動車が実用化されている。この種のハイブリッド自動車では、エンジンの出力軸にクラッチを介して変速機の入力軸を接続し、変速機の入力軸の外周にモータを装備して、変速機の出力軸に差動装置を介して左右の駆動輪を接続してパワートレインを構成しているものがある。
【0003】
さらに、このようなハイブリッド自動車の変速機に、例えば特許文献1に記載されているような所謂デュアルクラッチ式変速機が適用される場合もある。特許文献1に記載のデュアルクラッチ式変速機は、第1入力軸と出力軸との間に複数の変速段を構成する第1歯車機構を設けると共に、第2入力軸と出力軸との間に複数の変速段を構成する第2歯車機構を設けている。第1歯車機構はエンジンの動力とモータの動力とが伝達可能とされており、第2歯車機構はエンジンの動力が伝達可能とされている。この技術の場合、第1入力軸と第2入力軸とを内外2重に配設される構造としており、モータは外側の入力軸(アウタ入力軸)に結合されている。
【0004】
また、清掃車やコンクリートポンプ車両やタンクローリ車両などのように作業装置を搭載した車両においては、作業装置の作動のために変速機から動力を取り出して作業装置に伝達するようにしたPTO(Power take-off)装置を搭載することが知られている。エンジンの駆動力と電動機の駆動力とをそれぞれ車両の駆動輪に伝達可能とした、いわゆるパラレル型ハイブリッド自動車においても、このPTO装置を搭載する場合がある。
【0005】
例えば特許文献2には、エンジンと、変速機と、エンジンと変速機との間に接続され、エンジンと共に又は単独で変速機に動力を供与し、エンジンの駆動により発電する駆動用モータと、エンジンとモータとの間に設けられ、動力を断接する入力クラッチと、変速機から動力を取り出すPTO装置(パワーテイクオフ)と、PTO装置を介して駆動される油圧ポンプ(作業装置,負荷装置)と、制御部とを有する、パワーテイクオフ付きハイブリッド車両が記載されている。
【0006】
特に、この技術では、制御部は、油圧ポンプの待機モードにおいては、入力クラッチを接続状態にし、エンジンを駆動して駆動モータに発電をさせる。これにより、エンジンとモータとの間には、変速機やPTO装置等の部材が介在していないため、モータは、高効率で発電を実行し、バッテリ充電量を短時間で高めることができ、エンジンの燃費も改善される。また、油圧ポンプの作業モードにおいては、入力クラッチを断状態にし、モータを駆動させて、モータから油圧ポンプに動力を供給させる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−126318号公報
【特許文献2】特開2010−221946号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
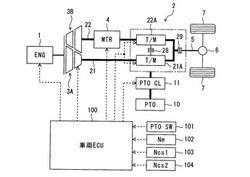
ところで、例えば図5に示すように、上記のような所謂デュアルクラッチ式変速機が適用されたパラレル型ハイブリッド自動車に、PTO装置10を搭載することが考えられる。図5に示すように、変速機2は、エンジン1と第1クラッチ3Aを介して接続する第1歯車機構21Aと、エンジン1と第2クラッチ3Bを介して接続する第2歯車機構22Aと、をそなえて構成される。なお、変速機2の出力トルクは、プロペラシャフト5に伝達され、デファレンシャル6を介して駆動輪7に伝達される。
【0009】
このようなデュアルクラッチ式の変速機2に、PTO装置10を搭載する場合、モータ4は、第1歯車機構21Aの入力軸(第1入力軸)21と第2歯車機構22Aの入力軸(第2入力軸)22との何れかの外周に装備することになる。第1入力軸21と第2入力軸22とを同軸に配置する場合、例えば、第1入力軸21をインナ軸に第2入力軸22をアウタ軸に配置することができる。この場合、モータ4は、アウタ軸である第2入力軸22の外周に装備することになる。
【0010】
第1,第2歯車機構21A,22Aを構成するためには、第1,第2歯車機構21A,22Aの歯車と歯車対を構成する歯車を支持するカウンタ軸が必要となる。インナ軸である第1入力軸21はアウタ軸である第2入力軸22よりも出力側(図5中、右側)に突出させ露出させることになるので、インナ軸である第1入力軸21の歯車との噛み合い歯車を支持する第1カウンタ軸はアウタ軸として出力側に配置し、アウタ軸である第2入力軸22の噛み合い歯車を支持する第2カウンタ軸はインナ軸として第1カウンタ軸よりも入力側(図5中、左側)に露出させて配置する。
この場合、PTO装置10を、PTOクラッチ11を介して第1カウンタ軸又は第2カウンタ軸に連結することが、装置の配置構成上好ましい。
【0011】
PTO装置10を作動させる際には、運転者がPTOスイッチ等を通じてPTOの作動を指示すると、PTOクラッチ11を結合させることになる。このPTOクラッチ11の結合時には、ギヤ鳴りやギヤの損傷を防ぐために、変速機側のPTO装置10との接続部分(図5に示す構成の場合、PTOクラッチ11の入力側が結合される第1カウンタ軸)が回転しないように、一度クラッチ(図5に示す構成の場合、第1クラッチ3A,第2クラッチ3B)を遮断すると共にモータ4に回転数がゼロとなるよう指示する。そして、変速機側のPTO装置10との接続部分の回転が止まった後に、PTOクラッチ11を接続し、再びクラッチ(図5に示す構成の場合、第1クラッチ3A)を接続することになる。
【0012】
しかしながら、このようなPTO装置を作動するにあたり、その作動開始や作動解除にかかる時間を短縮させて、より効率よく作業をできるようにしたいという要請が市場から強く起こっている。つまり、上記のように、一度クラッチを切って変速機側の回転が止まるのを待つ場合、変速機側の回転が自然に止まるまでには時間を要し、その分だけPTO装置の作動開始までの時間を要してしまう。
【0013】
変速機側の回転をより速やかに停止させる手法には、変速機をギヤ入れすることにより、回転を停止させる、所謂カウンタブレーキを利用することも考えられるが、この場合、停止しているギヤにギヤ入れする必要があるため、必ず停車状態でカウンタブレーキを利用することになる。したがって、車両の完全な停止を待たなければならず、その分だけPTO装置の作動開始までの時間を要してしまう。また、カウンタブレーキを頻繁に使用すると、変速機のギヤのシンクロ機構の負担がかかり機構の耐久性上好ましくない。
【0014】
本発明は、かかる課題に鑑み創案されたもので、変速機の機構に負担を負わせることなく、PTO装置の作動開始までの時間を短縮することができるようにした、ハイブリッド自動車の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
本発明の第1のハイブリッド自動車の制御装置は、第1及び第2歯車機構を有するデュアルクラッチ式変速機と、前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、PTOクラッチを介して前記第2歯車機構に接続されたPTO装置と、前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、をそなえたパラレル型のハイブリッド自動車の制御装置であって、前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続することを特徴としている。
【0016】
本発明の第2のハイブリッド自動車の制御装置は、第1及び第2歯車機構を有するデュアルクラッチ式変速機と、前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、PTOクラッチを介して前記第1歯車機構に接続されたPTO装置と、前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、をそなえたパラレル型のハイブリッド自動車の制御装置であって、前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断し、前記カウンタ軸用クラッチを接続してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第1のカウンタ軸及び前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続することを特徴としている。
【0017】
前記制御手段は、前記モータへの前記停止指示をしてから所定時間内に、前記モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施することが好ましい。
【0018】
この場合、前記モータ回転数の低下状態を判定する前記所定回転数として、第1の所定回転数とこの第1の所定回転数よりも低い第2の所定回転数とを設け、前記モータへの前記停止指示をしてから第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施し、前記モータへの前記停止指示をしてから前記第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下した場合であっても、この時点から第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するという2段階で、モータ回転数の低下状態に応じた制御を行なってもよい。もちろん、前記第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下したら、前記第1のカウンタ軸又は前記第2のカウンタ軸の回転数がゼロとなったとして、前記PTOクラッチを接続する。
【0019】
さらにこの場合、前記モータ回転数の低下状態を判定する前記所定回転数として、前記第1の所定回転数よりも高い第3の所定回転数を設け、前記モータへの前記停止指示をしてから前記第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下した場合であって、この時点から前記第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下することなく、前記第3の所定回転数よりも大きくなった場合には、この時点から、前記停止指示をした時点以降と同様に、前記2段階でのモータ回転数の低下状態に応じた制御を行なうようにしてもよい。
【発明の効果】
【0020】
本発明の第1のハイブリッド自動車の制御装置によれば、PTOクラッチの接続指示がなされた場合、第1主クラッチ及び第2主クラッチ及び出力クラッチを遮断してから、モータの回転数がゼロとなるようにモータに停止指示をするので、モータが速やかに回転数をゼロに減速しながらモータの装備された第2入力軸と連結される第2のカウンタ軸の回転数が速やかにゼロとなり、第2のカウンタ軸に対してPTOクラッチを接続できるようになり、PTOクラッチを接続するまでの時間を短縮することができる。また、変速機の機構に負担を負わせることもない。
【0021】
本発明の第2のハイブリッド自動車の制御装置によれば、PTOクラッチの接続指示がなされた場合、第1主クラッチ及び第2主クラッチ及び出力クラッチを遮断し、カウンタ軸用クラッチを接続してから、モータの回転数がゼロとなるようにモータに停止指示をするので、モータが速やかに回転数をゼロに減速しながらモータの装備された第2入力軸と連結される第2のカウンタ軸の回転数及びカウンタ軸用クラッチにより第2のカウンタ軸と連結される第1のカウンタ軸の回転数が速やかにゼロとなり、第1のカウンタ軸に対してPTOクラッチを接続できるようになり、PTOクラッチを接続するまでの時間を短縮することができる。また、変速機の機構に負担を負わせることもない。
【0022】
また、PTOクラッチを接続する時点では、カウンタ軸用クラッチが接続されているので、PTO装置を作動させる際には、第1主クラッチの出力軸と連結される第1のカウンタ軸と、第2主クラッチの出力軸と連結される第2のカウンタ軸とが連結されるため、常時、モータのトルクをPTO装置に供給可能であり、エンジンとモータとを適宜使用しながら、PTO装置を作動させることができる。
【0023】
モータへの停止指示をしてから所定時間内に、モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施すれば、何らかの不具合等によってモータの回転数の低下に時間がかかる場合に、カウンタブレーキ制御によって第1のカウンタ軸や第2のカウンタ軸の回転数が速やかにゼロとなり、PTOクラッチを接続するまでの時間を抑制することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系及びその制御装置を示す概略構成図である。
【図2】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系の変速機を示すスケルトン図及び各変速段の設定にかかるシンクロの状態を示す図である。
【図3】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の制御装置による制御を説明するフローチャートである。
【図4】本発明の一実施形態の変形例にかかるパラレル型ハイブリッド自動車の制御装置による制御を説明するフローチャートである。
【図5】本発明の課題を説明するパラレル型ハイブリッド自動車の駆動系の概略構成図である。
【発明を実施するための形態】
【0025】
以下、図面により本発明の実施の形態を説明する。
〔実施形態〕
図1〜図3は本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系及びその制御装置を示す図であり、これらの図に基づいて説明する。なお、ここでは、図1,図2(a)中左側である変速機2の入力側を前方(符号F)として、図中右側である変速機2の出力側を後方(符号R)として説明する。
また、本実施形態にかかるPTO装置10は、取り出した動力を、清掃車やコンクリートポンプ車両やタンクローリ車両などに装備される作業装置にその駆動力として供給するものであり、いずれの作業装置にも適用しうる。
【0026】
〔構成〕
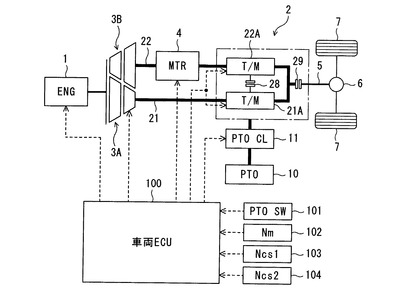
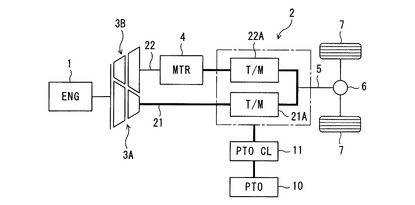
本実施形態にかかるパラレル型ハイブリッド自動車の駆動系は、図1の概略構成図に示すように構成されており、変速機2は、エンジン1と第1主クラッチ(以下、第1クラッチ又は単にクラッチという)3Aを介して接続する第1歯車機構(第1の動力伝達機構)21Aと、エンジン1と第2主クラッチ(以下、第2クラッチ又は単にクラッチという)3Bを介して接続する第2歯車機構(第1の動力伝達機構)22Aと、をそなえて構成される。なお、変速機2の出力トルクは、プロペラシャフト5に伝達され、デファレンシャル6を介して駆動輪7に伝達される。
【0027】
このようなデュアルクラッチ式の変速機2に、PTO装置10を搭載する場合、モータ4は、第1歯車機構21Aの入力軸(第1入力軸)21と第2歯車機構22Aの入力軸(第2入力軸)22との何れかの外周に装備することになる。第1入力軸21と第2入力軸22とを同軸に配置する場合、例えば、第1入力軸21をインナ軸に第2入力軸22をアウタ軸に配置することができる。この場合、モータ4は、アウタ軸である第2入力軸22の外周に装備することになる。
【0028】
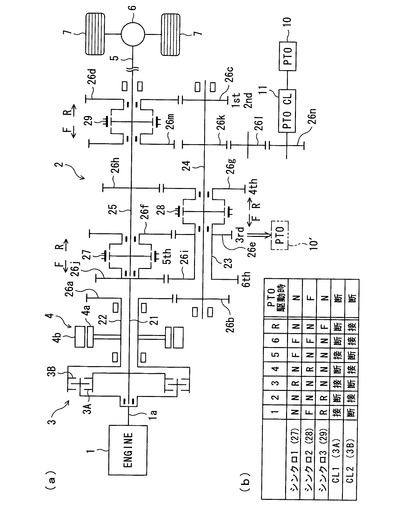
図2(a)は、そのデュアルクラッチ式の変速機2の構成をより詳細に示すスケルトン図である。図2(a)に示すように、変速機2には、走行用動力源であるエンジン1がクラッチユニット3を介して接続されている。クラッチユニット3は、内側にインナクラッチである第1クラッチ3Aが、その外側のアウタクラッチである第2クラッチ3Bが互いに同軸に配置されている。各クラッチ3A,3Bの入力側には、エンジン1の出力軸1aが接続され、第1クラッチ3Aの出力側には、インナ軸である変速機2の第1入力軸21が接続され、第2クラッチ3Bの出力側には、アウタ軸である変速機2の第2入力軸22が接続されている。第1入力軸21と第2入力軸22も同軸に配置されている。そして、アウタ軸である第2入力軸22の外周にモータ(電動発電機)4のロータ(回転子)4aが結合されている。なお、モータ4のステータ(固定子)4bはクラッチ3のケーシング側に固定されている。
【0029】
第1歯車機構21Aと第2歯車機構22Aとを構成するために、このような第1入力軸21及び第2入力軸22と平行に、第1カウンタ軸23及び第2カウンタ軸24が配設され、第1入力軸21と第1カウンタ軸23とが歯車対26i,26jで接続され、第2入力軸22と第2カウンタ軸24とが歯車対26a,26bで接続されている。歯車対26i,26jは6速段を達成するために使用される。
【0030】
特に、インナ軸である第1入力軸21は、アウタ軸である第2入力軸22よりも変速機2の後方に突出し露出しており、この露出部に歯車26jが固設されている。また、第1カウンタ軸23はアウタ軸であり、第2カウンタ軸24はインナ軸である。インナ軸である第2カウンタ軸24は、アウタ軸である第1カウンタ軸23よりも変速機2の前方及び後方に突出し露出しており、この前方露出部に歯車26bが固設されている。
【0031】
また、第1入力軸21及び第2入力軸22と同軸上に、出力軸25が配設され、第1カウンタ軸23と出力軸25との間、及び、第2カウンタ軸24と出力軸25との間に、それぞれ各変速段の歯車対が介装されている。
【0032】
第1カウンタ軸23と出力軸25との間には,3速段を達成するための歯車対26e,26fが介装される。また、4速段を達成するために、第1,2カウンタ軸23,24と同軸で第2カウンタ軸24と断接可能な歯車26gと出力軸25に固設された歯車26hとからなる歯車対26g,26hが設けられている。また、第2カウンタ軸24と出力軸25との間には,1速段,2速段を達成するための歯車対26c,26dと、4速段を達成するための歯車対26g,26hとが介装され、さらに、後退段(R)を達成するために、歯車26lを介して歯車対26k,26mが介装されている。
【0033】
さらに、出力軸25の入力側の端部における、第1入力軸21に固設された歯車26jと出力軸25に回転可能に軸支された歯車26fとの間の外周には、変速機2から駆動輪7側への出力を遮断する出力クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ1ともいう)27が介装されている。このシンクロ27を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、第1入力軸21と出力軸25とを直結し、シンクロ27を中立位置から出力側(矢印R側)に移動すると、出力軸25と歯車26fとを接続し、歯車対26e,26fを介して、第1カウンタ軸23と出力軸25とを接続する。
【0034】
また、出力軸25の出力側の端部における、出力軸25に回転可能に軸支された歯車26dと出力軸25に回転可能に軸支された歯車26mとの間の外周には、変速機2から駆動輪7側への出力を遮断する出力クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ3ともいう)29が介装されている。このシンクロ29を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、出力軸25と歯車26mとを接続し、歯車組26k,26l,26mを介して、第2カウンタ軸24と出力軸25とを接続し、シンクロ29を中立位置から出力側(矢印R側)に移動すると、出力軸25と歯車26dとを接続し、歯車対26c,26dを介して、第2カウンタ軸24と出力軸25とを接続する。このように、シンクロ27,29をいずれも中立位置に設定すると、変速機2から駆動輪7側への出力を遮断することができ、この点からシンクロ27,29を出力クラッチとも呼ぶ。
【0035】
また、第2カウンタ軸24の外周に回転可能に軸支された第1カウンタ軸23の出力側の端部と第2カウンタ軸24の外周に回転可能に軸支された歯車26gとの間の第2カウンタ軸24外周には、第1歯車機構21Aと第2歯車機構22Bとを連結可能なカウンタ軸用クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ2ともいう)28が介装されている。このシンクロ28を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、第1カウンタ軸23と第2カウンタ軸24とを接続し、中立位置から出力側(矢印R側)に移動すると、歯車26gと第2カウンタ軸24とを接続する。このように、シンクロ28を入力側(矢印F側)に移動すると、第1カウンタ軸23と第2カウンタ軸24とを接続し、第1歯車機構21Aと第2歯車機構22Bとを連結することができるため、シンクロ28をカウンタ軸用クラッチとも呼ぶ。
【0036】
これらの各軸及び歯車の組み合わせにより第1歯車機構21Aと第2歯車機構22Aとが構成される。
以下、各変速段の設定について説明する。
【0037】
図2(b)に示すように、1速段(図2中、「1」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を前方(F)に(第1カウンタ軸23と第2カウンタ軸24との結合)、シンクロ3を後方(R)に(歯車26dと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0038】
2速段(図2中、「2」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を中立(N)に、シンクロ3を後方(R)に(歯車26dと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0039】
3速段(図2中、「3」で示す)を達成するには、シンクロ1を後方(R)に(歯車26fと出力軸25との結合)、シンクロ2を中立(N)に、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0040】
4速段(図2中、「4」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を後方(R)に(第2カウンタ軸24と歯車26gとの結合)、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0041】
5速段(図2中、「5」で示す)を達成するには、シンクロ1を前方(F)に(第1入力軸21と出力軸25との結合、直結)、シンクロ2を中立(N)に、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0042】
6速段(図2中、「6」で示す)を達成するには、シンクロ1を前方(F)に(第1入力軸21と出力軸25との結合)、シンクロ2を前方(F)に(第1カウンタ軸23と第2カウンタ軸24との結合)、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0043】
後退段(図2中、「R」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を中立(N)に、シンクロ3を前方(F)に(歯車26mと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0044】
このような変速機2の後退段にかかる歯車26lには、歯車26nが噛合しており、歯車26nの回転軸に、PTOクラッチ11を介してPTO装置10が接続される。
【0045】
さらに、図1に示すように、車両の全体を制御するために、車両ECU(車両用電子制御ユニット,制御手段)100が備えられている。この車両ECU100は、メモリ(ROM,RAM)及びCPU等で構成されるコンピュータであり、タイマが内蔵される。車両ECU100は、PTO作動時に、エンジン1,クラッチユニット3,変速機2,モータ4をそれぞれ制御する。
【0046】
このために、PTOの作動を指令するPTOスイッチ(PTOSW)101からのオンオフ信号と、モータ4の回転数(回転速度)Nmを検出するモータ回転数検出手段としてのモータ回転数センサ102からの検出信号と、第1カウンタ軸23の回転数(回転速度)Ncs1を検出する第1カウンタ軸回転数検出手段としての回転数センサ103からの検出信号と、第2カウンタ軸24の回転数(回転速度)Ncs2を検出する第2カウンタ軸回転数検出手段としての回転数センサ104からの検出信号とが、車両ECU100に入力されるようになっている。
【0047】
なお、エンジン1の制御は、エンジン制御用のエンジンECUを通じて、また、モータ4の制御は、モータ4のインバータ制御用のインバータECUを通じて、変速機2の制御は、変速機制御用の変速機ECUを通じて、それぞれ行なってもよい。
【0048】
車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされると、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を何れも動力遮断状態とし、カウンタ軸用クラッチとしてのシンクロ28を接続状態とする。この場合のシンクロ27,29の動力遮断状態とするとは、シンクロ27,29をいずれも中立位置(N)とすることである。
【0049】
本実施形態では、「カウンタ軸用クラッチとしてのシンクロ28を接続する処理」はPTOクラッチ11を接続するための条件として必須ではないが、アウタ軸である第1のカウンタ軸23と第1のカウンタ軸23内に内装されたインナ軸である第2のカウンタ軸24とを連結すると、両者の回転数差によって生じる両カウンタ軸23,24の摺動による磨耗の進行等の不具合を回避できるので、ここでは、両カウンタ軸23,24を連結する。
【0050】
また、シンクロ28を接続すると、第1のカウンタ軸23と第2のカウンタ軸24とが一体に回転するので、第1歯車機構21Aの変速段を用いても、第2歯車機構22Aの変速段を用いても、即ち、1速段〜6速段及び後退段の何れの変速段を用いても、モータ4の出力トルクを、PTO装置10に取り出すことができる。
【0051】
なお、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされた場合に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とし、車速Vが一定車速V1よりも大きいと、本制御装置による制御が走行に影響しないように、PTOクラッチ11の接続指示を無効とする。
【0052】
車両ECU100は、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,29の断接が完了したら、モータ4の回転数がゼロとなるようにモータ4に停止指示をする。そして、さらにモータ4及び第2カウンタ軸24の各回転数を監視しながら、モータ4の回転数Nm及び第2カウンタ軸24の回転数Ncs2がいずれもゼロとなったら、PTOクラッチ11を接続する。
【0053】
ただし、本実施形態では、車両ECU100は、モータ4への停止指示をしてから所定時間内に、モータの回転数Nmが所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するようにしている。
【0054】
本実施形態の場合、モータ回転数Nmの低下状態を判定する所定回転数として、第1の所定回転数Nm1とこの第1の所定回転数(減速状態判定回転数)Nm1よりも低い第2の所定回転数(停止判定回転数)Nm2とを設け、モータ4への停止指示をしてから第1の所定時間T1内に、モータ回転数Nmが第1の所定回転数Nm1以内に低下しない場合には、カウンタブレーキ制御を実施し、モータへの停止指示をしてから第1の所定時間T1内にモータ回転数Nmが第1の所定回転数Nm1以内に低下した場合であっても、この時点から第2の所定時間T2内に、モータ回転数Nmが第2の所定回転数Nm2以内に低下しない場合には、カウンタブレーキ制御を実施するという2段階に、モータ回転数Nmの低下状態を判定して、PTOクラッチ11を接続するための制御を行なうようになっている。
【0055】
なお、カウンタブレーキ制御とは、車両が停止してから変速機2をギヤ入れすることにより、変速機の回転(ここでは、PTOクラッチ11が接続されている第2カウンタ軸24の回転)を停止させる制御であり、車両が停止したら、シンクロ29を中立位置から入力側(矢印F側)又は出力側(矢印R側)に移動することにより、第2カウンタ軸24と出力軸25とを接続して、カウンタブレーキを実施することができる。なお、PTOクラッチ11が第1カウンタ軸23に接続されている場合は、シンクロ27を中立位置から入力側(矢印F側)又は出力側(矢印R側)に移動することにより、第1カウンタ軸23と出力軸25とを接続して、カウンタブレーキを実施することができる。
【0056】
〔作用,効果〕
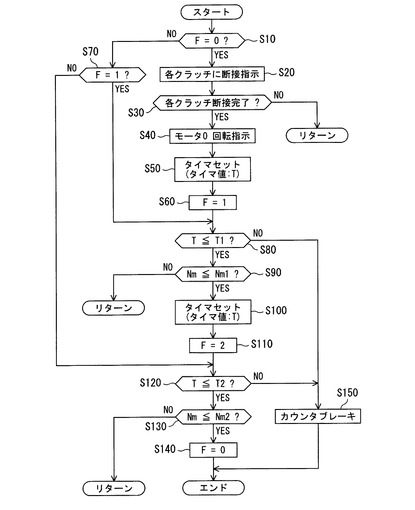
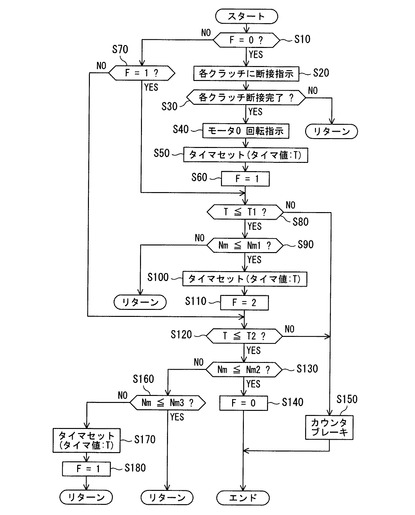
本発明の一実施形態に係るハイブリッド自動車の制御装置は上述のように構成されているので、例えば図3のフローチャートに示すようにPTOクラッチ11の接続前の制御が行なわれる。なお、このフローは制御終了まで所定の制御周期で繰り返される。
つまり、PTO作動要求があると、車両ECU100により、図3のフローチャートに示す処理が開始され、まず、ステップS10でフラグFが0であるか否かを判定する。このフラグFは、制御開始時には0とされ、その後、モータ4に停止指示(モータ0回転指示)がされると1とされ、その後、モータ4の回転数が順調に低下すると2とされる。
【0057】
制御開始当初は、フラグFは0であり、ステップS20に進み、各クラッチに遮断を指示する。つまり、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29に動力遮断指令する。この場合のシンクロ27,29の動力遮断指令とは、シンクロ27,29をいずれも中立位置(N)とする指令である。なお、制御開始当初のモータ回転数Nmは、600rpm程度と想定される。
【0058】
次のステップS30では、各クラッチの断接が完了したかを判定する。つまり、モータ4及び第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,29の断接が完了したかを判定する。ここで、何回かの制御周期を経れば、各クラッチの断接が完了し、ステップS40に進み、モータ4に停止指示(モータ0回転指示)をし、ステップS50に進み、タイマをセットし、ステップS60に進み、フラグFを1にセットする。
【0059】
タイマセット後は、タイマ値Tが0からカウントされていき、ステップS80に進み、タイマ値Tが第1所定時間T1以内かを判定し、タイマ値Tが第1所定時間T1を超えない限りは、ステップS90に進み、モータ4の回転数Nmが第1所定回転数Nm1以内かを判定し、モータ回転数Nmが第1所定回転数Nm1以内でなければリターンし、次周期の処理を行なう。
【0060】
なお、第1所定回転数Nm1はモータ4の減速過程が順調であるかを判定する回転数であり、例えば200rpm程度とする。
モータ4が順調に停止に向かえば、タイマ値Tが第1所定時間T1を超えない間に、モータ回転数Nmが第1所定回転数Nm1以内となって、次のステップS100に進み、タイマをセットし、ステップS110に進み、フラグFを2にセットする。
【0061】
この場合も、タイマセット後は、タイマ値Tが0からカウントされていき、ステップS120に進み、タイマ値Tが第2所定時間T2以内かを判定し、タイマ値Tが第2所定時間T2を超えない限りは、ステップS130に進み、モータ4の回転数Nmが第2所定回転数Nm2以内かを判定し、モータ回転数Nmが第2所定回転数Nm2以内でなければリターンし、次周期の処理を行なう。
【0062】
なお、第2所定回転数Nm2はモータ4が停止領域に入ったと判定する回転数であり、例えば100rpm程度とする。
モータ4が順調に停止に向かえば、タイマ値Tが第2所定時間T2を超えない間に、モータ回転数Nmが第2所定回転数Nm2以内となって、モータ4が停止領域に入り、当然、第2カウンタ軸24の回転数Ncs2もゼロとなっており、ステップS140に進み、フラグFを0にセットして、この制御を終了し、PTOクラッチ11を接続する。
【0063】
一方、モータ4が順調に停止に向かわないと、タイマ値Tが第1所定時間T1を超えるまでモータ回転数Nmが第1所定回転数Nm1以内まで減少しない場合があり、また、タイマ値Tが第1所定時間T1を超えるまでにモータ回転数Nmが第1所定回転数Nm1以内まで減少した場合であっても、この後、リセットされたタイマ値Tが第2所定時間T2を超えるまでにモータ回転数Nmが第2所定回転数Nm2以内まで減少しない場合がある。
【0064】
このような場合には、モータ4等に何らかの不具合(フェイル)が生じたものと判定して、ステップS80からNoルートを経てステップS150に進むか、或いは、ステップS120からNoルートを経てステップS150に進み、車両の停止を待って変速機4をギヤ入れするカウンタブレーキを実施する。
【0065】
したがって、本制御装置によれば、PTOクラッチ11の接続指示がなされた場合、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を何れも動力遮断状態としてから、モータ4の回転数Nmがゼロとなるようにモータ4に停止指示をするので、モータ4が速やかに回転数ゼロ(停止)へと減速しながら、モータ4が装備された第2の入力軸22と接続されている第2のカウンタ軸24の回転数を速やかにゼロとするので、第2のカウンタ軸24に対してPTOクラッチ11を早急に接続することができるようになり、PTOクラッチ11bの接続までの時間を短縮することができる。
【0066】
また、モータ4への停止指示をしてから所定時間内に、モータ4の回転数Nmが所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するので、何らかの不具合等によってモータ4の回転数の低下に時間がかかる場合に、カウンタブレーキ制御によって第2のカウンタ軸24の回転数が速やかにゼロとなり、PTOクラッチ11を接続するまでの時間を抑制することができる。
【0067】
特に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とするので、車両の停止前から本制御が実施され、例えば、車両の停止とほぼ同時に、PTOクラッチ11を接続することも可能になり、PTOクラッチ11を接続するまでの時間を実質的に大きく短縮することができる。
また、変速機42の機構に負担を負わせることもない。
【0068】
〔変形例1〕
なお、上記の実施形態の制御では考慮していないが、クラッチ3A,3Bを遮断指令した場合に、クラッチ3A,3Bが完全に遮断されずに、いわゆる引きずり状態となる場合がある。この場合には、クラッチ3Bを介して直接的に、クラッチ3A等を介して間接的に、エンジン1の回転トルクがモータ4に加わる(いわゆる引きずりトルク)ため、モータ4の回転数をゼロに近づけていく制御時に、モータ4はエンジントルクに抗するトルク(負のトルク)を発揮しながら回転数がゼロに近づいていく。
【0069】
しかし、モータ4が発揮しうるトルクはモータ回転数がゼロに近づくにしたがって減少するので、エンジン1の出力トルクが大きいとモータ4が発揮する負のトルクがエンジン1の正のトルク(引きずりトルク)に負けて、一旦下がったモータ4の回転数が再び上昇する場合がある。例えば、この時点では、変速機2の出力軸25は駆動輪7との間を遮断されたニュートラル状態であるため、ドライバがもしもアクセルペダルを踏むとこれによって増加するエンジン1の出力トルクの大部分がモータ4のトルクに対抗することになるため、モータ4の回転数が再び上昇する場合が生じる。
【0070】
この一方で、PTO装置10を使用しようとする場合は、車両は減速する状況下にあるので、ドライバのアクセルペダルの踏み込みは継続されず、エンジン1の出力トルクの増大は一時的なものと考えられる。そこで、このような場合には、やがて、エンジン1の出力トルクは減少し、引きずりトルクがあっても、モータ4はこのエンジンのトルクに抗しながら回転数がゼロに近づいていくものと考えられ、車両の停止を待ってから行なうカウンタブレーキを選択するよりも、このまま、モータ4の回転数がゼロに近づくのを待った方が、PTOクラッチ11を接続するまでの時間を実質的に短縮することができる。また、上記のように、モータ4の故障が予想される場合には、カウンタブレーキを選択するしかないが、この場合は、モータ4の故障ではないので、カウンタブレーキに伴うシンクロ27,29等の負荷の軽減を考え、出来るだけカウンタブレーキを選択しないという観点からも、モータ4の回転数がゼロに近づくのを待つことが好ましい。
【0071】
この場合の処理は、モータ回転数Nmの低下状態を判定する所定回転数として、第1の所定回転数Nm1よりも高い第3の所定回転数Nm3(例えば、250rpm程度)を設け、モータ4への停止指示をしてから第1の所定時間T1内にモータ回転数Nmが第1の所定回転数Nm1以内に低下した場合であって、この時点から第2の所定時間T2内に、モータ回転数Nmが第2の所定回転数Nm2以内に低下することなく、第3の所定回転数Nm3よりも大きくなった場合には、この時点から、停止指示をした時点以降と同様に、2段階でのモータ回転数の低下状態に応じた制御を行なうようにすればよい。
【0072】
図4はこの場合の処理を説明するフローチャートであり、図4に示すように、図3のフローチャートに対して、ステップS160,S170,S180を追加している。これらの点以外は、図3のフローチャートと同様であるので、重複説明を省略する。
つまり、ステップS130のNoルートに、ステップS160,S170,S180を設け、ステップS160では、モータ4の回転数Nmが第3所定回転数Nm3よりも大きいかを判定し、モータ回転数Nmが第3所定回転数Nm3よりも大きくなければリターンし、モータ回転数Nmが第3所定回転数Nm3よりも大きければ、次のステップS170に進み、タイマをセットし、ステップS180に進み、フラグFを1にセットする。
【0073】
これによって、次周期では、ステップS80から処理を行なう。
したがって、再び、モータ回転数Nmの低下を待って、基本的には、カウンタブレーキを選択することなく、第2のカウンタ軸24の回転数をゼロにして、PTOクラッチ11を接続する。
これにより、万一、引きずりトルクが生じても、安直にカウンタブレーキを選択することなく、結果としてはPTOクラッチ11を接続するまでの時間を実質的に短縮することができる。
【0074】
〔変形例2〕
また、上記の実施形態では、PTOクラッチ11を第2のカウンタ軸24に接続する構成としているが、PTOクラッチ11を第1のカウンタ軸23に接続する構成としてもよい。
【0075】
つまり、図2中に二点鎖線で示すように、アウタ軸である第1カウンタ軸23の歯車(例えば、3速段にかかる歯車26e)にPTO装置10´を接続する構成も可能である。
この場合、第1のカウンタ軸23と歯車によって連結される第1入力軸21には、モータ4は装備されないので、モータ4が装備される第2入力軸22に連結される第2のカウンタ軸24を第1のカウンタ軸23と連結すればよい。
【0076】
そこで、この場合には、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされると、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を動力遮断すると共に、カウンタ軸用クラッチとしてのシンクロ28を接続する。この場合のシンクロ27,29の動力遮断とは、シンクロ27,29をいずれも中立位置(N)とする。
【0077】
なお、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされた場合に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とし、車速Vが一定車速V1よりも大きいと、本制御装置による制御が走行に影響しないように、PTOクラッチ11の接続指示を無効とする。
【0078】
車両ECU100は、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,28,29の断接が完了したら、モータ4の回転数がゼロとなるようにモータ4に停止指示をする。そして、さらにモータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、第1カウンタ軸23及び第2カウンタ軸24の回転数Ncs1,Ncs2がいずれもゼロとなったら、PTOクラッチ11を接続する。
【0079】
したがって、図3のフローチャートにおいて各クラッチに断接を指示するステップS20では、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29に動力遮断指令し、カウンタ軸用クラッチとしてのシンクロ28に接続指令する。
【0080】
また、次の各クラッチの断接が完了したかを判定するステップS30では、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27〜29の断接が完了したかを判定する。
これらの点以外は、図3又は図4のフローチャートと同様であるので、重複説明を省略する。
このようにして、PTOクラッチ11を第1のカウンタ軸23に接続する場合にも、上記の実施形態と同様の効果を得ることができる。
【0081】
〔その他〕
以上、本発明の実施の形態について説明したが、本発明はかかる実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で、かかる実施の形態を適宜変更して実施しうるものである。
例えば、上記実施形態では、前進6速段のデュアルクラッチ式の変速機を例示したが、変速段数はこれに限るものではなく、また、変速機の構成も図2に例示するものに限らない。
【符号の説明】
【0082】
1 エンジン(内燃機関)
2 デュアルクラッチ式変速機
3 クラッチユニット
3A 第1クラッチ(第1主クラッチ)
3B 第2クラッチ(第2主クラッチ)
4 モータ(電動発電機)
5 プロペラシャフト
6 デファレンシャル
7 駆動輪
10,10´ PTO装置
11 PTOクラッチ
21A 第1歯車機構
21 第1入力軸
22A 第2歯車機構
22 第2入力軸
23 第1カウンタ軸
24 第2カウンタ軸
25 出力軸
26a〜26n 変速用の歯車
27,29 シンクロナイザ(出力クラッチ)
28 シンクロナイザ(カウンタ軸用クラッチ)
100 車両ECU(制御手段)
101 PTOスイッチ(PTOSW)
102 モータ回転数検出手段としてのモータ回転数センサ
103 第1カウンタ軸回転数検出手段としての回転数センサ
104 第2カウンタ軸回転数検出手段としての回転数センサ
【技術分野】
【0001】
本発明は、デュアルクラッチ式の自動変速機とパワーテイクオフ装置(PTO)とをそなえたハイブリッド自動車の制御装置に関するものである。
【背景技術】
【0002】
近年、エンジン(内燃機関)及びモータ(電動発電機)の駆動力を任意に駆動輪に伝達可能なパラレル型ハイブリッド自動車が実用化されている。この種のハイブリッド自動車では、エンジンの出力軸にクラッチを介して変速機の入力軸を接続し、変速機の入力軸の外周にモータを装備して、変速機の出力軸に差動装置を介して左右の駆動輪を接続してパワートレインを構成しているものがある。
【0003】
さらに、このようなハイブリッド自動車の変速機に、例えば特許文献1に記載されているような所謂デュアルクラッチ式変速機が適用される場合もある。特許文献1に記載のデュアルクラッチ式変速機は、第1入力軸と出力軸との間に複数の変速段を構成する第1歯車機構を設けると共に、第2入力軸と出力軸との間に複数の変速段を構成する第2歯車機構を設けている。第1歯車機構はエンジンの動力とモータの動力とが伝達可能とされており、第2歯車機構はエンジンの動力が伝達可能とされている。この技術の場合、第1入力軸と第2入力軸とを内外2重に配設される構造としており、モータは外側の入力軸(アウタ入力軸)に結合されている。
【0004】
また、清掃車やコンクリートポンプ車両やタンクローリ車両などのように作業装置を搭載した車両においては、作業装置の作動のために変速機から動力を取り出して作業装置に伝達するようにしたPTO(Power take-off)装置を搭載することが知られている。エンジンの駆動力と電動機の駆動力とをそれぞれ車両の駆動輪に伝達可能とした、いわゆるパラレル型ハイブリッド自動車においても、このPTO装置を搭載する場合がある。
【0005】
例えば特許文献2には、エンジンと、変速機と、エンジンと変速機との間に接続され、エンジンと共に又は単独で変速機に動力を供与し、エンジンの駆動により発電する駆動用モータと、エンジンとモータとの間に設けられ、動力を断接する入力クラッチと、変速機から動力を取り出すPTO装置(パワーテイクオフ)と、PTO装置を介して駆動される油圧ポンプ(作業装置,負荷装置)と、制御部とを有する、パワーテイクオフ付きハイブリッド車両が記載されている。
【0006】
特に、この技術では、制御部は、油圧ポンプの待機モードにおいては、入力クラッチを接続状態にし、エンジンを駆動して駆動モータに発電をさせる。これにより、エンジンとモータとの間には、変速機やPTO装置等の部材が介在していないため、モータは、高効率で発電を実行し、バッテリ充電量を短時間で高めることができ、エンジンの燃費も改善される。また、油圧ポンプの作業モードにおいては、入力クラッチを断状態にし、モータを駆動させて、モータから油圧ポンプに動力を供給させる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2011−126318号公報
【特許文献2】特開2010−221946号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、例えば図5に示すように、上記のような所謂デュアルクラッチ式変速機が適用されたパラレル型ハイブリッド自動車に、PTO装置10を搭載することが考えられる。図5に示すように、変速機2は、エンジン1と第1クラッチ3Aを介して接続する第1歯車機構21Aと、エンジン1と第2クラッチ3Bを介して接続する第2歯車機構22Aと、をそなえて構成される。なお、変速機2の出力トルクは、プロペラシャフト5に伝達され、デファレンシャル6を介して駆動輪7に伝達される。
【0009】
このようなデュアルクラッチ式の変速機2に、PTO装置10を搭載する場合、モータ4は、第1歯車機構21Aの入力軸(第1入力軸)21と第2歯車機構22Aの入力軸(第2入力軸)22との何れかの外周に装備することになる。第1入力軸21と第2入力軸22とを同軸に配置する場合、例えば、第1入力軸21をインナ軸に第2入力軸22をアウタ軸に配置することができる。この場合、モータ4は、アウタ軸である第2入力軸22の外周に装備することになる。
【0010】
第1,第2歯車機構21A,22Aを構成するためには、第1,第2歯車機構21A,22Aの歯車と歯車対を構成する歯車を支持するカウンタ軸が必要となる。インナ軸である第1入力軸21はアウタ軸である第2入力軸22よりも出力側(図5中、右側)に突出させ露出させることになるので、インナ軸である第1入力軸21の歯車との噛み合い歯車を支持する第1カウンタ軸はアウタ軸として出力側に配置し、アウタ軸である第2入力軸22の噛み合い歯車を支持する第2カウンタ軸はインナ軸として第1カウンタ軸よりも入力側(図5中、左側)に露出させて配置する。
この場合、PTO装置10を、PTOクラッチ11を介して第1カウンタ軸又は第2カウンタ軸に連結することが、装置の配置構成上好ましい。
【0011】
PTO装置10を作動させる際には、運転者がPTOスイッチ等を通じてPTOの作動を指示すると、PTOクラッチ11を結合させることになる。このPTOクラッチ11の結合時には、ギヤ鳴りやギヤの損傷を防ぐために、変速機側のPTO装置10との接続部分(図5に示す構成の場合、PTOクラッチ11の入力側が結合される第1カウンタ軸)が回転しないように、一度クラッチ(図5に示す構成の場合、第1クラッチ3A,第2クラッチ3B)を遮断すると共にモータ4に回転数がゼロとなるよう指示する。そして、変速機側のPTO装置10との接続部分の回転が止まった後に、PTOクラッチ11を接続し、再びクラッチ(図5に示す構成の場合、第1クラッチ3A)を接続することになる。
【0012】
しかしながら、このようなPTO装置を作動するにあたり、その作動開始や作動解除にかかる時間を短縮させて、より効率よく作業をできるようにしたいという要請が市場から強く起こっている。つまり、上記のように、一度クラッチを切って変速機側の回転が止まるのを待つ場合、変速機側の回転が自然に止まるまでには時間を要し、その分だけPTO装置の作動開始までの時間を要してしまう。
【0013】
変速機側の回転をより速やかに停止させる手法には、変速機をギヤ入れすることにより、回転を停止させる、所謂カウンタブレーキを利用することも考えられるが、この場合、停止しているギヤにギヤ入れする必要があるため、必ず停車状態でカウンタブレーキを利用することになる。したがって、車両の完全な停止を待たなければならず、その分だけPTO装置の作動開始までの時間を要してしまう。また、カウンタブレーキを頻繁に使用すると、変速機のギヤのシンクロ機構の負担がかかり機構の耐久性上好ましくない。
【0014】
本発明は、かかる課題に鑑み創案されたもので、変速機の機構に負担を負わせることなく、PTO装置の作動開始までの時間を短縮することができるようにした、ハイブリッド自動車の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
本発明の第1のハイブリッド自動車の制御装置は、第1及び第2歯車機構を有するデュアルクラッチ式変速機と、前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、PTOクラッチを介して前記第2歯車機構に接続されたPTO装置と、前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、をそなえたパラレル型のハイブリッド自動車の制御装置であって、前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続することを特徴としている。
【0016】
本発明の第2のハイブリッド自動車の制御装置は、第1及び第2歯車機構を有するデュアルクラッチ式変速機と、前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、PTOクラッチを介して前記第1歯車機構に接続されたPTO装置と、前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、をそなえたパラレル型のハイブリッド自動車の制御装置であって、前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断し、前記カウンタ軸用クラッチを接続してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第1のカウンタ軸及び前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続することを特徴としている。
【0017】
前記制御手段は、前記モータへの前記停止指示をしてから所定時間内に、前記モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施することが好ましい。
【0018】
この場合、前記モータ回転数の低下状態を判定する前記所定回転数として、第1の所定回転数とこの第1の所定回転数よりも低い第2の所定回転数とを設け、前記モータへの前記停止指示をしてから第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施し、前記モータへの前記停止指示をしてから前記第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下した場合であっても、この時点から第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するという2段階で、モータ回転数の低下状態に応じた制御を行なってもよい。もちろん、前記第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下したら、前記第1のカウンタ軸又は前記第2のカウンタ軸の回転数がゼロとなったとして、前記PTOクラッチを接続する。
【0019】
さらにこの場合、前記モータ回転数の低下状態を判定する前記所定回転数として、前記第1の所定回転数よりも高い第3の所定回転数を設け、前記モータへの前記停止指示をしてから前記第1の所定時間内に前記モータの回転数が前記第1の所定回転数以内に低下した場合であって、この時点から前記第2の所定時間内に、前記モータの回転数が前記第2の所定回転数以内に低下することなく、前記第3の所定回転数よりも大きくなった場合には、この時点から、前記停止指示をした時点以降と同様に、前記2段階でのモータ回転数の低下状態に応じた制御を行なうようにしてもよい。
【発明の効果】
【0020】
本発明の第1のハイブリッド自動車の制御装置によれば、PTOクラッチの接続指示がなされた場合、第1主クラッチ及び第2主クラッチ及び出力クラッチを遮断してから、モータの回転数がゼロとなるようにモータに停止指示をするので、モータが速やかに回転数をゼロに減速しながらモータの装備された第2入力軸と連結される第2のカウンタ軸の回転数が速やかにゼロとなり、第2のカウンタ軸に対してPTOクラッチを接続できるようになり、PTOクラッチを接続するまでの時間を短縮することができる。また、変速機の機構に負担を負わせることもない。
【0021】
本発明の第2のハイブリッド自動車の制御装置によれば、PTOクラッチの接続指示がなされた場合、第1主クラッチ及び第2主クラッチ及び出力クラッチを遮断し、カウンタ軸用クラッチを接続してから、モータの回転数がゼロとなるようにモータに停止指示をするので、モータが速やかに回転数をゼロに減速しながらモータの装備された第2入力軸と連結される第2のカウンタ軸の回転数及びカウンタ軸用クラッチにより第2のカウンタ軸と連結される第1のカウンタ軸の回転数が速やかにゼロとなり、第1のカウンタ軸に対してPTOクラッチを接続できるようになり、PTOクラッチを接続するまでの時間を短縮することができる。また、変速機の機構に負担を負わせることもない。
【0022】
また、PTOクラッチを接続する時点では、カウンタ軸用クラッチが接続されているので、PTO装置を作動させる際には、第1主クラッチの出力軸と連結される第1のカウンタ軸と、第2主クラッチの出力軸と連結される第2のカウンタ軸とが連結されるため、常時、モータのトルクをPTO装置に供給可能であり、エンジンとモータとを適宜使用しながら、PTO装置を作動させることができる。
【0023】
モータへの停止指示をしてから所定時間内に、モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施すれば、何らかの不具合等によってモータの回転数の低下に時間がかかる場合に、カウンタブレーキ制御によって第1のカウンタ軸や第2のカウンタ軸の回転数が速やかにゼロとなり、PTOクラッチを接続するまでの時間を抑制することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系及びその制御装置を示す概略構成図である。
【図2】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系の変速機を示すスケルトン図及び各変速段の設定にかかるシンクロの状態を示す図である。
【図3】本発明の一実施形態にかかるパラレル型ハイブリッド自動車の制御装置による制御を説明するフローチャートである。
【図4】本発明の一実施形態の変形例にかかるパラレル型ハイブリッド自動車の制御装置による制御を説明するフローチャートである。
【図5】本発明の課題を説明するパラレル型ハイブリッド自動車の駆動系の概略構成図である。
【発明を実施するための形態】
【0025】
以下、図面により本発明の実施の形態を説明する。
〔実施形態〕
図1〜図3は本発明の一実施形態にかかるパラレル型ハイブリッド自動車の駆動系及びその制御装置を示す図であり、これらの図に基づいて説明する。なお、ここでは、図1,図2(a)中左側である変速機2の入力側を前方(符号F)として、図中右側である変速機2の出力側を後方(符号R)として説明する。
また、本実施形態にかかるPTO装置10は、取り出した動力を、清掃車やコンクリートポンプ車両やタンクローリ車両などに装備される作業装置にその駆動力として供給するものであり、いずれの作業装置にも適用しうる。
【0026】
〔構成〕
本実施形態にかかるパラレル型ハイブリッド自動車の駆動系は、図1の概略構成図に示すように構成されており、変速機2は、エンジン1と第1主クラッチ(以下、第1クラッチ又は単にクラッチという)3Aを介して接続する第1歯車機構(第1の動力伝達機構)21Aと、エンジン1と第2主クラッチ(以下、第2クラッチ又は単にクラッチという)3Bを介して接続する第2歯車機構(第1の動力伝達機構)22Aと、をそなえて構成される。なお、変速機2の出力トルクは、プロペラシャフト5に伝達され、デファレンシャル6を介して駆動輪7に伝達される。
【0027】
このようなデュアルクラッチ式の変速機2に、PTO装置10を搭載する場合、モータ4は、第1歯車機構21Aの入力軸(第1入力軸)21と第2歯車機構22Aの入力軸(第2入力軸)22との何れかの外周に装備することになる。第1入力軸21と第2入力軸22とを同軸に配置する場合、例えば、第1入力軸21をインナ軸に第2入力軸22をアウタ軸に配置することができる。この場合、モータ4は、アウタ軸である第2入力軸22の外周に装備することになる。
【0028】
図2(a)は、そのデュアルクラッチ式の変速機2の構成をより詳細に示すスケルトン図である。図2(a)に示すように、変速機2には、走行用動力源であるエンジン1がクラッチユニット3を介して接続されている。クラッチユニット3は、内側にインナクラッチである第1クラッチ3Aが、その外側のアウタクラッチである第2クラッチ3Bが互いに同軸に配置されている。各クラッチ3A,3Bの入力側には、エンジン1の出力軸1aが接続され、第1クラッチ3Aの出力側には、インナ軸である変速機2の第1入力軸21が接続され、第2クラッチ3Bの出力側には、アウタ軸である変速機2の第2入力軸22が接続されている。第1入力軸21と第2入力軸22も同軸に配置されている。そして、アウタ軸である第2入力軸22の外周にモータ(電動発電機)4のロータ(回転子)4aが結合されている。なお、モータ4のステータ(固定子)4bはクラッチ3のケーシング側に固定されている。
【0029】
第1歯車機構21Aと第2歯車機構22Aとを構成するために、このような第1入力軸21及び第2入力軸22と平行に、第1カウンタ軸23及び第2カウンタ軸24が配設され、第1入力軸21と第1カウンタ軸23とが歯車対26i,26jで接続され、第2入力軸22と第2カウンタ軸24とが歯車対26a,26bで接続されている。歯車対26i,26jは6速段を達成するために使用される。
【0030】
特に、インナ軸である第1入力軸21は、アウタ軸である第2入力軸22よりも変速機2の後方に突出し露出しており、この露出部に歯車26jが固設されている。また、第1カウンタ軸23はアウタ軸であり、第2カウンタ軸24はインナ軸である。インナ軸である第2カウンタ軸24は、アウタ軸である第1カウンタ軸23よりも変速機2の前方及び後方に突出し露出しており、この前方露出部に歯車26bが固設されている。
【0031】
また、第1入力軸21及び第2入力軸22と同軸上に、出力軸25が配設され、第1カウンタ軸23と出力軸25との間、及び、第2カウンタ軸24と出力軸25との間に、それぞれ各変速段の歯車対が介装されている。
【0032】
第1カウンタ軸23と出力軸25との間には,3速段を達成するための歯車対26e,26fが介装される。また、4速段を達成するために、第1,2カウンタ軸23,24と同軸で第2カウンタ軸24と断接可能な歯車26gと出力軸25に固設された歯車26hとからなる歯車対26g,26hが設けられている。また、第2カウンタ軸24と出力軸25との間には,1速段,2速段を達成するための歯車対26c,26dと、4速段を達成するための歯車対26g,26hとが介装され、さらに、後退段(R)を達成するために、歯車26lを介して歯車対26k,26mが介装されている。
【0033】
さらに、出力軸25の入力側の端部における、第1入力軸21に固設された歯車26jと出力軸25に回転可能に軸支された歯車26fとの間の外周には、変速機2から駆動輪7側への出力を遮断する出力クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ1ともいう)27が介装されている。このシンクロ27を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、第1入力軸21と出力軸25とを直結し、シンクロ27を中立位置から出力側(矢印R側)に移動すると、出力軸25と歯車26fとを接続し、歯車対26e,26fを介して、第1カウンタ軸23と出力軸25とを接続する。
【0034】
また、出力軸25の出力側の端部における、出力軸25に回転可能に軸支された歯車26dと出力軸25に回転可能に軸支された歯車26mとの間の外周には、変速機2から駆動輪7側への出力を遮断する出力クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ3ともいう)29が介装されている。このシンクロ29を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、出力軸25と歯車26mとを接続し、歯車組26k,26l,26mを介して、第2カウンタ軸24と出力軸25とを接続し、シンクロ29を中立位置から出力側(矢印R側)に移動すると、出力軸25と歯車26dとを接続し、歯車対26c,26dを介して、第2カウンタ軸24と出力軸25とを接続する。このように、シンクロ27,29をいずれも中立位置に設定すると、変速機2から駆動輪7側への出力を遮断することができ、この点からシンクロ27,29を出力クラッチとも呼ぶ。
【0035】
また、第2カウンタ軸24の外周に回転可能に軸支された第1カウンタ軸23の出力側の端部と第2カウンタ軸24の外周に回転可能に軸支された歯車26gとの間の第2カウンタ軸24外周には、第1歯車機構21Aと第2歯車機構22Bとを連結可能なカウンタ軸用クラッチとしてのシンクロナイザ(図中にはそのスリーブを示す、以下、単に、シンクロ2ともいう)28が介装されている。このシンクロ28を図2(a)中に示す中立位置から入力側(矢印F側)に移動すると、第1カウンタ軸23と第2カウンタ軸24とを接続し、中立位置から出力側(矢印R側)に移動すると、歯車26gと第2カウンタ軸24とを接続する。このように、シンクロ28を入力側(矢印F側)に移動すると、第1カウンタ軸23と第2カウンタ軸24とを接続し、第1歯車機構21Aと第2歯車機構22Bとを連結することができるため、シンクロ28をカウンタ軸用クラッチとも呼ぶ。
【0036】
これらの各軸及び歯車の組み合わせにより第1歯車機構21Aと第2歯車機構22Aとが構成される。
以下、各変速段の設定について説明する。
【0037】
図2(b)に示すように、1速段(図2中、「1」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を前方(F)に(第1カウンタ軸23と第2カウンタ軸24との結合)、シンクロ3を後方(R)に(歯車26dと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0038】
2速段(図2中、「2」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を中立(N)に、シンクロ3を後方(R)に(歯車26dと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0039】
3速段(図2中、「3」で示す)を達成するには、シンクロ1を後方(R)に(歯車26fと出力軸25との結合)、シンクロ2を中立(N)に、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0040】
4速段(図2中、「4」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を後方(R)に(第2カウンタ軸24と歯車26gとの結合)、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0041】
5速段(図2中、「5」で示す)を達成するには、シンクロ1を前方(F)に(第1入力軸21と出力軸25との結合、直結)、シンクロ2を中立(N)に、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを接続状態にし、第2クラッチ3Bを遮断状態にする。
【0042】
6速段(図2中、「6」で示す)を達成するには、シンクロ1を前方(F)に(第1入力軸21と出力軸25との結合)、シンクロ2を前方(F)に(第1カウンタ軸23と第2カウンタ軸24との結合)、シンクロ3を中立(N)に、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0043】
後退段(図2中、「R」で示す)を達成するには、シンクロ1を中立(N)に、シンクロ2を中立(N)に、シンクロ3を前方(F)に(歯車26mと出力軸25との結合)、それぞれ設定する。エンジン1の駆動トルクを使用する場合には、第1クラッチ3Aを遮断状態にし、第2クラッチ3Bを接続状態にする。
【0044】
このような変速機2の後退段にかかる歯車26lには、歯車26nが噛合しており、歯車26nの回転軸に、PTOクラッチ11を介してPTO装置10が接続される。
【0045】
さらに、図1に示すように、車両の全体を制御するために、車両ECU(車両用電子制御ユニット,制御手段)100が備えられている。この車両ECU100は、メモリ(ROM,RAM)及びCPU等で構成されるコンピュータであり、タイマが内蔵される。車両ECU100は、PTO作動時に、エンジン1,クラッチユニット3,変速機2,モータ4をそれぞれ制御する。
【0046】
このために、PTOの作動を指令するPTOスイッチ(PTOSW)101からのオンオフ信号と、モータ4の回転数(回転速度)Nmを検出するモータ回転数検出手段としてのモータ回転数センサ102からの検出信号と、第1カウンタ軸23の回転数(回転速度)Ncs1を検出する第1カウンタ軸回転数検出手段としての回転数センサ103からの検出信号と、第2カウンタ軸24の回転数(回転速度)Ncs2を検出する第2カウンタ軸回転数検出手段としての回転数センサ104からの検出信号とが、車両ECU100に入力されるようになっている。
【0047】
なお、エンジン1の制御は、エンジン制御用のエンジンECUを通じて、また、モータ4の制御は、モータ4のインバータ制御用のインバータECUを通じて、変速機2の制御は、変速機制御用の変速機ECUを通じて、それぞれ行なってもよい。
【0048】
車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされると、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を何れも動力遮断状態とし、カウンタ軸用クラッチとしてのシンクロ28を接続状態とする。この場合のシンクロ27,29の動力遮断状態とするとは、シンクロ27,29をいずれも中立位置(N)とすることである。
【0049】
本実施形態では、「カウンタ軸用クラッチとしてのシンクロ28を接続する処理」はPTOクラッチ11を接続するための条件として必須ではないが、アウタ軸である第1のカウンタ軸23と第1のカウンタ軸23内に内装されたインナ軸である第2のカウンタ軸24とを連結すると、両者の回転数差によって生じる両カウンタ軸23,24の摺動による磨耗の進行等の不具合を回避できるので、ここでは、両カウンタ軸23,24を連結する。
【0050】
また、シンクロ28を接続すると、第1のカウンタ軸23と第2のカウンタ軸24とが一体に回転するので、第1歯車機構21Aの変速段を用いても、第2歯車機構22Aの変速段を用いても、即ち、1速段〜6速段及び後退段の何れの変速段を用いても、モータ4の出力トルクを、PTO装置10に取り出すことができる。
【0051】
なお、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされた場合に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とし、車速Vが一定車速V1よりも大きいと、本制御装置による制御が走行に影響しないように、PTOクラッチ11の接続指示を無効とする。
【0052】
車両ECU100は、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,29の断接が完了したら、モータ4の回転数がゼロとなるようにモータ4に停止指示をする。そして、さらにモータ4及び第2カウンタ軸24の各回転数を監視しながら、モータ4の回転数Nm及び第2カウンタ軸24の回転数Ncs2がいずれもゼロとなったら、PTOクラッチ11を接続する。
【0053】
ただし、本実施形態では、車両ECU100は、モータ4への停止指示をしてから所定時間内に、モータの回転数Nmが所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するようにしている。
【0054】
本実施形態の場合、モータ回転数Nmの低下状態を判定する所定回転数として、第1の所定回転数Nm1とこの第1の所定回転数(減速状態判定回転数)Nm1よりも低い第2の所定回転数(停止判定回転数)Nm2とを設け、モータ4への停止指示をしてから第1の所定時間T1内に、モータ回転数Nmが第1の所定回転数Nm1以内に低下しない場合には、カウンタブレーキ制御を実施し、モータへの停止指示をしてから第1の所定時間T1内にモータ回転数Nmが第1の所定回転数Nm1以内に低下した場合であっても、この時点から第2の所定時間T2内に、モータ回転数Nmが第2の所定回転数Nm2以内に低下しない場合には、カウンタブレーキ制御を実施するという2段階に、モータ回転数Nmの低下状態を判定して、PTOクラッチ11を接続するための制御を行なうようになっている。
【0055】
なお、カウンタブレーキ制御とは、車両が停止してから変速機2をギヤ入れすることにより、変速機の回転(ここでは、PTOクラッチ11が接続されている第2カウンタ軸24の回転)を停止させる制御であり、車両が停止したら、シンクロ29を中立位置から入力側(矢印F側)又は出力側(矢印R側)に移動することにより、第2カウンタ軸24と出力軸25とを接続して、カウンタブレーキを実施することができる。なお、PTOクラッチ11が第1カウンタ軸23に接続されている場合は、シンクロ27を中立位置から入力側(矢印F側)又は出力側(矢印R側)に移動することにより、第1カウンタ軸23と出力軸25とを接続して、カウンタブレーキを実施することができる。
【0056】
〔作用,効果〕
本発明の一実施形態に係るハイブリッド自動車の制御装置は上述のように構成されているので、例えば図3のフローチャートに示すようにPTOクラッチ11の接続前の制御が行なわれる。なお、このフローは制御終了まで所定の制御周期で繰り返される。
つまり、PTO作動要求があると、車両ECU100により、図3のフローチャートに示す処理が開始され、まず、ステップS10でフラグFが0であるか否かを判定する。このフラグFは、制御開始時には0とされ、その後、モータ4に停止指示(モータ0回転指示)がされると1とされ、その後、モータ4の回転数が順調に低下すると2とされる。
【0057】
制御開始当初は、フラグFは0であり、ステップS20に進み、各クラッチに遮断を指示する。つまり、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29に動力遮断指令する。この場合のシンクロ27,29の動力遮断指令とは、シンクロ27,29をいずれも中立位置(N)とする指令である。なお、制御開始当初のモータ回転数Nmは、600rpm程度と想定される。
【0058】
次のステップS30では、各クラッチの断接が完了したかを判定する。つまり、モータ4及び第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,29の断接が完了したかを判定する。ここで、何回かの制御周期を経れば、各クラッチの断接が完了し、ステップS40に進み、モータ4に停止指示(モータ0回転指示)をし、ステップS50に進み、タイマをセットし、ステップS60に進み、フラグFを1にセットする。
【0059】
タイマセット後は、タイマ値Tが0からカウントされていき、ステップS80に進み、タイマ値Tが第1所定時間T1以内かを判定し、タイマ値Tが第1所定時間T1を超えない限りは、ステップS90に進み、モータ4の回転数Nmが第1所定回転数Nm1以内かを判定し、モータ回転数Nmが第1所定回転数Nm1以内でなければリターンし、次周期の処理を行なう。
【0060】
なお、第1所定回転数Nm1はモータ4の減速過程が順調であるかを判定する回転数であり、例えば200rpm程度とする。
モータ4が順調に停止に向かえば、タイマ値Tが第1所定時間T1を超えない間に、モータ回転数Nmが第1所定回転数Nm1以内となって、次のステップS100に進み、タイマをセットし、ステップS110に進み、フラグFを2にセットする。
【0061】
この場合も、タイマセット後は、タイマ値Tが0からカウントされていき、ステップS120に進み、タイマ値Tが第2所定時間T2以内かを判定し、タイマ値Tが第2所定時間T2を超えない限りは、ステップS130に進み、モータ4の回転数Nmが第2所定回転数Nm2以内かを判定し、モータ回転数Nmが第2所定回転数Nm2以内でなければリターンし、次周期の処理を行なう。
【0062】
なお、第2所定回転数Nm2はモータ4が停止領域に入ったと判定する回転数であり、例えば100rpm程度とする。
モータ4が順調に停止に向かえば、タイマ値Tが第2所定時間T2を超えない間に、モータ回転数Nmが第2所定回転数Nm2以内となって、モータ4が停止領域に入り、当然、第2カウンタ軸24の回転数Ncs2もゼロとなっており、ステップS140に進み、フラグFを0にセットして、この制御を終了し、PTOクラッチ11を接続する。
【0063】
一方、モータ4が順調に停止に向かわないと、タイマ値Tが第1所定時間T1を超えるまでモータ回転数Nmが第1所定回転数Nm1以内まで減少しない場合があり、また、タイマ値Tが第1所定時間T1を超えるまでにモータ回転数Nmが第1所定回転数Nm1以内まで減少した場合であっても、この後、リセットされたタイマ値Tが第2所定時間T2を超えるまでにモータ回転数Nmが第2所定回転数Nm2以内まで減少しない場合がある。
【0064】
このような場合には、モータ4等に何らかの不具合(フェイル)が生じたものと判定して、ステップS80からNoルートを経てステップS150に進むか、或いは、ステップS120からNoルートを経てステップS150に進み、車両の停止を待って変速機4をギヤ入れするカウンタブレーキを実施する。
【0065】
したがって、本制御装置によれば、PTOクラッチ11の接続指示がなされた場合、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を何れも動力遮断状態としてから、モータ4の回転数Nmがゼロとなるようにモータ4に停止指示をするので、モータ4が速やかに回転数ゼロ(停止)へと減速しながら、モータ4が装備された第2の入力軸22と接続されている第2のカウンタ軸24の回転数を速やかにゼロとするので、第2のカウンタ軸24に対してPTOクラッチ11を早急に接続することができるようになり、PTOクラッチ11bの接続までの時間を短縮することができる。
【0066】
また、モータ4への停止指示をしてから所定時間内に、モータ4の回転数Nmが所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施するので、何らかの不具合等によってモータ4の回転数の低下に時間がかかる場合に、カウンタブレーキ制御によって第2のカウンタ軸24の回転数が速やかにゼロとなり、PTOクラッチ11を接続するまでの時間を抑制することができる。
【0067】
特に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とするので、車両の停止前から本制御が実施され、例えば、車両の停止とほぼ同時に、PTOクラッチ11を接続することも可能になり、PTOクラッチ11を接続するまでの時間を実質的に大きく短縮することができる。
また、変速機42の機構に負担を負わせることもない。
【0068】
〔変形例1〕
なお、上記の実施形態の制御では考慮していないが、クラッチ3A,3Bを遮断指令した場合に、クラッチ3A,3Bが完全に遮断されずに、いわゆる引きずり状態となる場合がある。この場合には、クラッチ3Bを介して直接的に、クラッチ3A等を介して間接的に、エンジン1の回転トルクがモータ4に加わる(いわゆる引きずりトルク)ため、モータ4の回転数をゼロに近づけていく制御時に、モータ4はエンジントルクに抗するトルク(負のトルク)を発揮しながら回転数がゼロに近づいていく。
【0069】
しかし、モータ4が発揮しうるトルクはモータ回転数がゼロに近づくにしたがって減少するので、エンジン1の出力トルクが大きいとモータ4が発揮する負のトルクがエンジン1の正のトルク(引きずりトルク)に負けて、一旦下がったモータ4の回転数が再び上昇する場合がある。例えば、この時点では、変速機2の出力軸25は駆動輪7との間を遮断されたニュートラル状態であるため、ドライバがもしもアクセルペダルを踏むとこれによって増加するエンジン1の出力トルクの大部分がモータ4のトルクに対抗することになるため、モータ4の回転数が再び上昇する場合が生じる。
【0070】
この一方で、PTO装置10を使用しようとする場合は、車両は減速する状況下にあるので、ドライバのアクセルペダルの踏み込みは継続されず、エンジン1の出力トルクの増大は一時的なものと考えられる。そこで、このような場合には、やがて、エンジン1の出力トルクは減少し、引きずりトルクがあっても、モータ4はこのエンジンのトルクに抗しながら回転数がゼロに近づいていくものと考えられ、車両の停止を待ってから行なうカウンタブレーキを選択するよりも、このまま、モータ4の回転数がゼロに近づくのを待った方が、PTOクラッチ11を接続するまでの時間を実質的に短縮することができる。また、上記のように、モータ4の故障が予想される場合には、カウンタブレーキを選択するしかないが、この場合は、モータ4の故障ではないので、カウンタブレーキに伴うシンクロ27,29等の負荷の軽減を考え、出来るだけカウンタブレーキを選択しないという観点からも、モータ4の回転数がゼロに近づくのを待つことが好ましい。
【0071】
この場合の処理は、モータ回転数Nmの低下状態を判定する所定回転数として、第1の所定回転数Nm1よりも高い第3の所定回転数Nm3(例えば、250rpm程度)を設け、モータ4への停止指示をしてから第1の所定時間T1内にモータ回転数Nmが第1の所定回転数Nm1以内に低下した場合であって、この時点から第2の所定時間T2内に、モータ回転数Nmが第2の所定回転数Nm2以内に低下することなく、第3の所定回転数Nm3よりも大きくなった場合には、この時点から、停止指示をした時点以降と同様に、2段階でのモータ回転数の低下状態に応じた制御を行なうようにすればよい。
【0072】
図4はこの場合の処理を説明するフローチャートであり、図4に示すように、図3のフローチャートに対して、ステップS160,S170,S180を追加している。これらの点以外は、図3のフローチャートと同様であるので、重複説明を省略する。
つまり、ステップS130のNoルートに、ステップS160,S170,S180を設け、ステップS160では、モータ4の回転数Nmが第3所定回転数Nm3よりも大きいかを判定し、モータ回転数Nmが第3所定回転数Nm3よりも大きくなければリターンし、モータ回転数Nmが第3所定回転数Nm3よりも大きければ、次のステップS170に進み、タイマをセットし、ステップS180に進み、フラグFを1にセットする。
【0073】
これによって、次周期では、ステップS80から処理を行なう。
したがって、再び、モータ回転数Nmの低下を待って、基本的には、カウンタブレーキを選択することなく、第2のカウンタ軸24の回転数をゼロにして、PTOクラッチ11を接続する。
これにより、万一、引きずりトルクが生じても、安直にカウンタブレーキを選択することなく、結果としてはPTOクラッチ11を接続するまでの時間を実質的に短縮することができる。
【0074】
〔変形例2〕
また、上記の実施形態では、PTOクラッチ11を第2のカウンタ軸24に接続する構成としているが、PTOクラッチ11を第1のカウンタ軸23に接続する構成としてもよい。
【0075】
つまり、図2中に二点鎖線で示すように、アウタ軸である第1カウンタ軸23の歯車(例えば、3速段にかかる歯車26e)にPTO装置10´を接続する構成も可能である。
この場合、第1のカウンタ軸23と歯車によって連結される第1入力軸21には、モータ4は装備されないので、モータ4が装備される第2入力軸22に連結される第2のカウンタ軸24を第1のカウンタ軸23と連結すればよい。
【0076】
そこで、この場合には、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされると、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29を動力遮断すると共に、カウンタ軸用クラッチとしてのシンクロ28を接続する。この場合のシンクロ27,29の動力遮断とは、シンクロ27,29をいずれも中立位置(N)とする。
【0077】
なお、車両ECU100は、PTOスイッチ101がオン入力されPTOクラッチ11の接続指示がなされた場合に、車速Vが一定車速V1(例えば、10km/h)以下の徐行速度であれば、PTOクラッチ11の接続指示を有効とし、車速Vが一定車速V1よりも大きいと、本制御装置による制御が走行に影響しないように、PTOクラッチ11の接続指示を無効とする。
【0078】
車両ECU100は、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27,28,29の断接が完了したら、モータ4の回転数がゼロとなるようにモータ4に停止指示をする。そして、さらにモータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、第1カウンタ軸23及び第2カウンタ軸24の回転数Ncs1,Ncs2がいずれもゼロとなったら、PTOクラッチ11を接続する。
【0079】
したがって、図3のフローチャートにおいて各クラッチに断接を指示するステップS20では、第1クラッチ3A及び第2クラッチ3B及び出力クラッチとしてのシンクロ27,29に動力遮断指令し、カウンタ軸用クラッチとしてのシンクロ28に接続指令する。
【0080】
また、次の各クラッチの断接が完了したかを判定するステップS30では、モータ4及び第1カウンタ軸23,第2カウンタ軸24の各回転数を監視しながら、これらのクラッチ3A,3B及びクラッチ(シンクロ)27〜29の断接が完了したかを判定する。
これらの点以外は、図3又は図4のフローチャートと同様であるので、重複説明を省略する。
このようにして、PTOクラッチ11を第1のカウンタ軸23に接続する場合にも、上記の実施形態と同様の効果を得ることができる。
【0081】
〔その他〕
以上、本発明の実施の形態について説明したが、本発明はかかる実施の形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で、かかる実施の形態を適宜変更して実施しうるものである。
例えば、上記実施形態では、前進6速段のデュアルクラッチ式の変速機を例示したが、変速段数はこれに限るものではなく、また、変速機の構成も図2に例示するものに限らない。
【符号の説明】
【0082】
1 エンジン(内燃機関)
2 デュアルクラッチ式変速機
3 クラッチユニット
3A 第1クラッチ(第1主クラッチ)
3B 第2クラッチ(第2主クラッチ)
4 モータ(電動発電機)
5 プロペラシャフト
6 デファレンシャル
7 駆動輪
10,10´ PTO装置
11 PTOクラッチ
21A 第1歯車機構
21 第1入力軸
22A 第2歯車機構
22 第2入力軸
23 第1カウンタ軸
24 第2カウンタ軸
25 出力軸
26a〜26n 変速用の歯車
27,29 シンクロナイザ(出力クラッチ)
28 シンクロナイザ(カウンタ軸用クラッチ)
100 車両ECU(制御手段)
101 PTOスイッチ(PTOSW)
102 モータ回転数検出手段としてのモータ回転数センサ
103 第1カウンタ軸回転数検出手段としての回転数センサ
104 第2カウンタ軸回転数検出手段としての回転数センサ
【特許請求の範囲】
【請求項1】
第1及び第2歯車機構を有するデュアルクラッチ式変速機と、
前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、
前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、
PTOクラッチを介して前記第2歯車機構に接続されたPTO装置と、
前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、
前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、
をそなえたパラレル型のハイブリッド自動車の制御装置であって、
前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、
前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、
前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続する
ことを特徴とする、ハイブリッド自動車の制御装置。
【請求項2】
第1及び第2歯車機構を有するデュアルクラッチ式変速機と、
前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、
前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、
PTOクラッチを介して前記第1歯車機構に接続されたPTO装置と、
前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、
前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、
をそなえたパラレル型のハイブリッド自動車の制御装置であって、
前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、
前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、
前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断し、前記カウンタ軸用クラッチを接続してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第1のカウンタ軸及び前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続する
ことを特徴とする、ハイブリッド自動車の制御装置。
【請求項3】
前記制御手段は、前記モータへの前記停止指示をしてから所定時間内に、前記モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施する
ことを特徴とする、請求項1又は2記載のハイブリッド自動車の制御装置。
【請求項1】
第1及び第2歯車機構を有するデュアルクラッチ式変速機と、
前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、
前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、
PTOクラッチを介して前記第2歯車機構に接続されたPTO装置と、
前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、
前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、
をそなえたパラレル型のハイブリッド自動車の制御装置であって、
前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、
前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、
前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続する
ことを特徴とする、ハイブリッド自動車の制御装置。
【請求項2】
第1及び第2歯車機構を有するデュアルクラッチ式変速機と、
前記第1歯車機構の第1入力軸には第1主クラッチを介して前記第2歯車機構の第2入力軸には第2主クラッチを介してそれぞれ接続されるエンジンと、
前記第2入力軸の外周に装備され電動機又は発電機として作動するモータと、
PTOクラッチを介して前記第1歯車機構に接続されたPTO装置と、
前記第1入力軸と連結される前記第1歯車機構の第1のカウンタ軸と、
前記第2入力軸と連結される前記第2歯車機構の第2のカウンタ軸と、
をそなえたパラレル型のハイブリッド自動車の制御装置であって、
前記変速機に、駆動輪側への出力を遮断する出力クラッチが備えられると共に、前記第1のカウンタ軸と前記第2のカウンタ軸とを連結可能なカウンタ軸用クラッチが備えられ、
前記PTO装置の作動時に、前記エンジン,前記モータ,前記第1及び第2主クラッチ,前記変速機,前記PTOクラッチ,前記出力クラッチ,前記カウンタ軸用クラッチを制御する制御手段を備え、
前記制御手段は、前記PTOクラッチの接続指示がなされた場合、前記第1主クラッチ及び前記第2主クラッチ及び前記出力クラッチを遮断し、前記カウンタ軸用クラッチを接続してから、前記モータの回転数がゼロとなるように前記モータに停止指示をして、前記第1のカウンタ軸及び前記第2のカウンタ軸の回転数がゼロとなったら、前記PTOクラッチを接続する
ことを特徴とする、ハイブリッド自動車の制御装置。
【請求項3】
前記制御手段は、前記モータへの前記停止指示をしてから所定時間内に、前記モータの回転数が所定回転数以内に低下しない場合には、カウンタブレーキ制御を実施する
ことを特徴とする、請求項1又は2記載のハイブリッド自動車の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−112073(P2013−112073A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258199(P2011−258199)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(598051819)ダイムラー・アクチェンゲゼルシャフト (1,147)
【氏名又は名称原語表記】Daimler AG
【住所又は居所原語表記】Mercedesstrasse 137,70327 Stuttgart,Deutschland
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(598051819)ダイムラー・アクチェンゲゼルシャフト (1,147)
【氏名又は名称原語表記】Daimler AG
【住所又は居所原語表記】Mercedesstrasse 137,70327 Stuttgart,Deutschland
【Fターム(参考)】
[ Back to top ]