
ハイブリッド自動車の制御装置
【課題】ハイブリッド自動車において、燃費の悪化とエミッション性能の悪化とを共に回避する。
【解決手段】コントローラ3は、要求駆動力が所定の切替値以下のときには、エンジン11を停止しかつモータ(電動モータ16)を運転することによって、モータの駆動力のみを車輪(駆動輪14)に出力し、要求駆動力が切替値よりも高いときには、少なくともエンジンを運転することによって、少なくともエンジンの駆動力を車輪に出力する。また、コントローラは要求駆動力が切替値よりも高くかつ触媒の活性化が必要なときには、当該触媒が活性化するまでの間、モータを、予め定められた上限出力よりも高めて運転しかつ、エンジンを触媒の活性を促進可能な活性促進モードで運転する。
【解決手段】コントローラ3は、要求駆動力が所定の切替値以下のときには、エンジン11を停止しかつモータ(電動モータ16)を運転することによって、モータの駆動力のみを車輪(駆動輪14)に出力し、要求駆動力が切替値よりも高いときには、少なくともエンジンを運転することによって、少なくともエンジンの駆動力を車輪に出力する。また、コントローラは要求駆動力が切替値よりも高くかつ触媒の活性化が必要なときには、当該触媒が活性化するまでの間、モータを、予め定められた上限出力よりも高めて運転しかつ、エンジンを触媒の活性を促進可能な活性促進モードで運転する。
【発明の詳細な説明】
【技術分野】
【0001】
ここに開示する技術は、それぞれ車輪に対し駆動力を出力するモータ及びエンジンを備えたハイブリッド自動車の制御装置に関する。
【背景技術】
【0002】
近年、車両の駆動源としてエンジン及びモータを備えたハイブリッド自動車が普及しつつある(例えば特許文献1、2参照)。これらの特許文献に記載されているハイブリッド自動車では、エンジンを停止しかつモータの駆動力のみにより走行するモータ走行と、エンジンを運転し、そのエンジンの駆動力により走行するエンジン走行(但し、モータの駆動力も併用する場合がある)とを、要求駆動力に応じて切り替えている。
【0003】
このようなハイブリッド自動車は、その走行中にエンジンが断続的に運転されることから、例えば特許文献1には、モータ走行中に、エンジン走行への切替に備えて触媒の活性状態を維持するために、触媒温度が低下してその活性化が必要になったときには、エンジンと駆動輪との間の駆動経路上に配設されたクラッチを開放することによってエンジンを無負荷状態で運転しつつ、その点火時期を遅角化することにより、触媒を早期に活性化する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−92428号公報
【特許文献2】特開2010−76712号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、例えばプラグインハイブリッド自動車では、バッテリの充電状態(State Of Charge:SOC)に応じてCD(Charge Depleting、電池使用)レンジと、CS(Charge Sustaining、充電維持)レンジとを切り替えて走行する。CDレンジは、極力、モータにより走行し、エンジンによる走行を制限する。ここで、特許文献1に記載されている技術のように、触媒温度が低下する度にエンジンを運転して触媒の活性化を図ったのでは、例えばCDレンジにおいてエンジン走行が制限されているにも拘わらず、触媒の活性化が頻繁に行われることになるため、その活性化に費やされる燃料量が増えてしまう。一方で、CDレンジであっても、要求駆動力が大きくてモータの上限出力(例えば、連続定格)を超えてしまうようなときには、エンジンを始動してエンジンの駆動力を車輪に出力しなければならないが、そのエンジンの運転時に触媒が活性化されていないと、エミッション性能が悪化してしまうことになる。
【0006】
ここに開示する技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ハイブリッド自動車において、燃費の悪化とエミッション性能の悪化とを共に回避することにある。
【課題を解決するための手段】
【0007】
本願発明者らは、触媒の活性化に要する時間は比較的短時間(例えば10〜20sec程度)である一方で、モータの出力は、短期間であれば、通常(例えば連続定格)よりも高められる点に着目して、要求駆動力が所定の切替値よりも高いためモータの通常の上限出力では要求駆動力を充足することができず、エンジンの運転が必要なときであって、触媒の活性化が必要なときには、モータの上限出力を短期間だけ高めるようにした。このことによって、エンジンの駆動力を車輪に対して実質的に出力しなくとも、モータの出力によって要求駆動力を充足させる。一方で、エンジンは触媒の活性化を促進する運転モードで運転することにより、触媒を早期に活性化させる。こうして、触媒の活性化後は、少なくともエンジンの駆動力を車輪に出力(エンジンの駆動力のみ、又は、エンジンとモータの駆動力の双方を出力)して、要求駆動力を充足する。このことにより、燃費の悪化とエミッション性能の悪化とを共に回避することが可能になる。
【0008】
具体的に、ここに開示する技術は、ハイブリッド自動車の制御装置に係り、それぞれ車輪に対し駆動力を出力するように構成されたモータ及びエンジンと、前記エンジンの排気通路上に配設された触媒と、要求駆動力に応じて前記エンジン及び前記モータを制御するよう構成されたコントローラと、を備える。
【0009】
前記コントローラは、前記要求駆動力が所定の切替値以下のときには、前記エンジンを停止しかつ前記モータを運転することによって、前記モータの駆動力のみを前記車輪に出力し、前記要求駆動力が前記切替値よりも高いときには、少なくとも前記エンジンを運転することによって、少なくとも前記エンジンの駆動力を前記車輪に出力し、前記コントローラはまた、前記要求駆動力が前記切替値よりも高くかつ前記触媒の活性化が必要なときには、当該触媒が活性化するまでの間、前記モータを、予め定められた上限出力よりも高めて運転しかつ、前記エンジンを前記触媒の活性を促進可能な活性促進モードで運転する。
【0010】
ここで、「触媒の活性を促進可能な活性促進モード」でエンジンを運転することには、公知の様々な手法を採用することが可能であり、当該エンジンが火花点火式エンジンであるときには、例えばその点火時期を遅角化することによって、排気温度を高めるような運転が例示される。また、当該エンジンが圧縮着火式エンジンであるときには、例えばその噴射時期を遅角化する等の方策によって、燃焼時期を遅角化させて排気温度を高めるような運転が例示される。
【0011】
また、活性促進モードでは、エンジンを無負荷又は軽負荷で運転することが、エミッションの悪化を抑制しつつ、触媒を短時間で活性化して燃料消費量を低減する上では望ましい。例えばエンジンと車輪との間の駆動経路上に、エンジントルクの遮断及び接続を切り替え可能な断続手段を設け、当該断続手段によってトルク伝達を遮断することによって、エンジンを無負荷で運転するようにしてもよい。
【0012】
また、「触媒の活性化が必要なとき」とは、触媒の浄化率が予め設定した基準値以下となるようなときであって、例えば触媒の温度によって判断することが可能である。
【0013】
前記の構成によると、要求駆動力が所定の切替値以下のときには、コントローラは、エンジンを停止しかつモータを運転することによって、モータの駆動力のみを車輪に出力する。これはモータ走行状態に相当する。一方、要求駆動力が切替値よりも高いときには、少なくともエンジンを運転することによって、少なくともエンジンの駆動力を車輪に出力する。これは、エンジン及びモータの双方を運転し、それらの駆動力を車輪に出力する併用走行状態としてもよいし、エンジンの駆動力のみを車輪に出力するエンジン走行状態としてもよい。
【0014】
そうして、要求駆動力が切替値よりも高いため、エンジンの運転(つまり始動)が必要で、しかも触媒の活性化が必要なときには、コントローラは、触媒が活性化するまでの間、モータを、予め定められた上限出力よりも高めて運転しながら、エンジンを触媒の活性を促進可能な活性促進モードで運転する。つまり、モータの出力を高めて要求駆動力を充足している間に、エンジンを活性促進モードで運転することによって、触媒の早期活性化を図る。
【0015】
この構成では、例えばモータ走行中に、触媒を活性状態で維持するのではなく、エンジンの運転が必要になったときでかつ触媒の活性化が必要なときに、触媒の活性化を図る。このため、触媒を活性状態で維持するための燃料は不要になる。これは特に、エンジンの運転が制限されるCDレンジにおける燃費の向上に有利になる。
【0016】
また、エンジンを活性促進モードで運転することによって、触媒の活性化を図るため、エミッションの悪化を抑制しながら、触媒を短時間で活性化することが可能になり、燃費の悪化とエミッション性能の悪化とを共に回避する上で有利になる。
【0017】
そうして、触媒を早期に活性化した後にエンジン走行又は併用走行へと移行をすることにより、触媒の活性状態を維持していなくても、エミッション性能の悪化が回避される。
【0018】
従って、前記の構成は特に、エンジンの運転が制限されるCDレンジにおいて燃費の悪化とエミッション性能の悪化とを共に回避する上で有利になる。
【0019】
前記モータの前記上限出力は、当該モータの連続定格であり、前記切替値は、前記モータの前記連続定格によって決定され、前記コントローラは、前記触媒が活性化するまでの間、前記モータを、当該モータの短時間定格に従って運転する、としてもよい。
【0020】
つまり、エンジンの運転及び停止の切替に係る切替値を、モータの連続定格によって決定することにより、例えばCDレンジにおける、エンジンの運転及び停止の切替が適正化される。モータの短時間定格は連続定格よりも高くなるため、要求駆動力が切替値よりも高いときに、そのモータの出力によって要求駆動力を充足することが可能になる。このことは、エンジンを活性促進モードで運転しているときに、そのエンジンを無負荷又は軽負荷で運転することを可能にする。
【0021】
前記コントローラは、低車速域では、前記切替値を中高車速域よりも低く設定する、としてもよい。ここで、「低車速域」「中車速域」「高車速域」はそれぞれ、エンジンの定格回転数を、「低回転域」「中回転域」「高回転域」3つの領域に区分した各領域に対応させることが可能である。
【0022】
この構成は、車速とモータ回転数とが比例するような構成、具体的にはモータが変速機と車輪との間に配置されているような構成において有利な構成である。つまり、モータは一般的に、低回転側において効率が低い、言い換えると発熱量が多くなる。このことは、モータを低回転側で運転したときには、モータ温度が比較的高くなってしまうことを意味する。
【0023】
一方で、モータは連続定格や短時間定格に従って運転されるが、この連続定格や短時間定格は、モータ内のコイルや永久磁石の温度限界に起因するモータの上限温度によって規定される。つまり、モータの温度が高ければ高いほど、モータの上限出力は抑制される。言い換えると、モータを上限出力よりも高めて運転しようとしたときに、モータの温度が高ければ高いほど、その運転可能な時間が短くなってしまう。
【0024】
従って、車速とモータ回転数とが比例するような車両の構成において、低車速域で要求駆動力が高まったときには、エンジンの始動を早めることによって、発熱し易い比較的低回転のモータの出力(但し、通常の上限出力よりも高い出力)をできるだけ低く抑えることが可能になる。その結果モータの温度上昇が抑制されるから、モータを上限出力よりも高めて運転する時間を、できるだけ長くすることが可能になる。
【0025】
前記コントローラは、前記触媒の活性化に必要な時間と、前記モータを前記上限出力よりも高めて前記要求駆動力を充足するように駆動することが可能な連続時間との比較から待ち時間を設定すると共に、前記要求駆動力が前記切替値よりも高い状態が前記待ち時間以上に継続したときに前記エンジンを始動しかつ、当該エンジンを前記活性促進モードで運転する一方、前記待ち時間が経過する前に、前記要求駆動力が前記切替値以下になったときには、前記エンジンを始動しない、としてもよい。
【0026】
この構成は、モータ走行中のエンジンの始動をできるだけ抑制する上で有効であり、例えばモータ温度に基づいて設定することが可能な、当該モータを上限出力よりも高めかつ要求駆動力を充足するように駆動することが可能な連続時間と、触媒の活性化に必要な時間とを比較する。モータの駆動連続時間から触媒活性時間を差し引いた待ち時間は、要求駆動力が切替値よりも高いにも拘わらず、エンジンを始動せずともモータの出力によって要求駆動力を充足することが可能な期間に相当する。
【0027】
要求駆動力が切替値よりも高い状態が待ち時間以上に継続したときには、モータ走行を継続することができず、エンジン走行又は併用走行に切り替える必要があるため、先ずは触媒を活性化すべくエンジンを始動しかつ、そのエンジンを活性促進モードで運転する。そうして、触媒の活性化後に、エンジン走行又は併用走行に切り替えて、要求駆動力を充足する。これによって、エミッション性能の悪化が回避される。
【0028】
一方、待ち時間が経過する前に、要求駆動力が切替値以下になったときには、エンジン走行又は併用走行への切り替えが不要であり、触媒の活性化も不要である。従って、エンジンを始動しないことにより、燃料消費量が抑制される。
【発明の効果】
【0029】
以上説明したように、前記のハイブリッド自動車の制御装置によると、例えばモータ走行中に触媒を活性状態で維持するのではなく、エンジンの運転が必要になったときでかつ触媒の活性化が必要なときに、触媒の活性化を図るため、触媒を活性状態で維持するための燃料は不要になり、燃費の向上に有利になる一方で、エンジンの運転時には触媒が活性化しているから、エミッション性能の向上にも有利になる。
【図面の簡単な説明】
【0030】
【図1】車両のパワートレイン及び制御装置の全体ブロック図である。
【図2】CDレンジとCSモードとのそれぞれについて、エンジン回転数の変化及びバッテリのSOCの変化の一例を示す図である。
【図3】CDレンジにおいて要求駆動力に対するモータの駆動力とエンジンの駆動力との分担の一例を示す図である。
【図4】エンジンの特性マップの一例である。
【図5】モータの特性マップの一例である。
【図6】コントローラが実行する、走行中のエンジン始動に関連するモータ制御に係るフローチャートである。
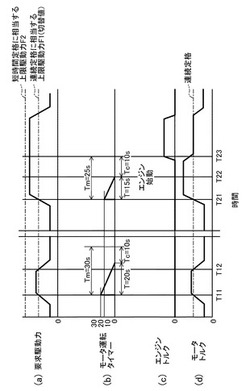
【図7】(a)要求駆動力、(b)モータ運転タイマー、(c)エンジントルク、(d)モータトルクの変化の一例を示す図である。
【発明を実施するための形態】
【0031】
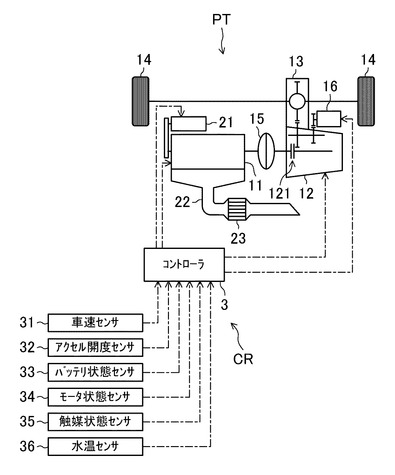
以下、ハイブリッド自動車の制御装置の実施形態を図面に基づいて説明する。尚、以下の好ましい実施形態の説明は例示である。図1は車両のパワートレイン及び制御装置の全体ブロック図である。パワートレインPTは、駆動力を発生するエンジン11と、このエンジン11に連結されて変速を行う歯車変速機構12と、歯車変速機構12からの出力を受けて左右に駆動力を配分する差動装置13と、差動装置13からの駆動力を受ける左右の駆動輪(例えば前輪)14,14と、エンジン11と歯車変速機構12との間に配置されたトルクコンバータ(流体伝動装置)15と、歯車変速機構12に対して駆動力伝達方向の下流側に配置されかつ差動装置13を通じて前記駆動輪14を駆動する電動モータ16と、を備えている。このハイブリッド自動車は、駆動源としてのエンジン11及び電動モータ16を備えた、いわゆるパラレルハイブリッド自動車であり、後述するように、車速及びアクセル開度に基づいて設定される要求駆動力に応じて、電動モータ16を運転しかつエンジン11を停止させるモータ走行状態と、電動モータ16とエンジン11との双方を運転する併用走行状態との少なくとも2つの走行状態を切り換えながら走行するように構成されている。
【0032】
エンジン11は、詳細な図示は省略するが、例えば4サイクル火花点火式エンジンである。エンジン11は、クランク軸に対しベルトを介して連結された発電機を備えており、この発電機は、スタータ及び発電機を統合したBISG21とされている。エンジン11の排気側に接続された排気通路22上には、排気ガスを浄化する例えば三元触媒23(以下、単に触媒23という)が配設されている。
【0033】
歯車変速機構12は、詳細な図示は省略するが、例えばその内部に、遊星歯車機構と、遊星歯車機構に含まれる各回転要素の回転を選択的に規制する摩擦締結要素として、複数のクラッチ要素及びブレーキ要素とを含んで構成された多段自動変速機として構成されている。この歯車変速機構12においては、複数のクラッチ要素及びブレーキ要素から選択された、少なくとも2つの要素を締結することで、各変速段を実現するように構成されている。つまり、歯車変速機構12は、少なくとも2つの要素を締結することで所定の変速段を実現したドライブ状態と、前記の要素を全て締結しないことによって、エンジン11と駆動輪14との間のトルクの伝達を遮断したニュートラル状態とに切り換わることから、このハイブリッド自動車においては特に、後述するように、歯車変速機構12を、前記の各クラッチ要素及び各ブレーキ要素の開放及び締結を切り換えることによって、エンジン11と駆動輪14との間でトルクを断続させる断続手段121として機能させる。この断続手段121は、車両の走行に連動してエンジン11が引き摺られながら従動回転する引き摺り現象を回避する上で有効である。
【0034】
前記電動モータ16は、例えば3相の交流同期モータであって、図示省略のバッテリ及びインバータを介して供給された駆動電流により駆動する。ここで、前記のモータ走行モードには、電動モータ16の駆動力によって走行している状態、電動モータ16を回生させながら走行している状態、電動モータ16が何ら作動せずに惰性で走行している状態、の少なくとも3つの状態を含む。
【0035】
車両の制御装置CRは、エンジン11の運転(BISG21を通じたエンジン11の始動制御も含む)、前記インバータの制御を通じた電動モータ16の運転(力行及び回生を含む)、歯車変速機構12の変速段等をそれぞれ制御する装置である。制御装置CRは、コントローラ3と、車両の走行状態を含む各種の状態を検出し、コントローラ3に提供する各種センサ31〜36とを備えて構成されている。この内、コントローラ3は、例えば通常のマイクロコンピュータであり、図示は省略するが、少なくともCPU、ROM、RAM、I/Oインターフェース回路、及びデータバスを備えて構成される。
【0036】
各種のセンサには、少なくとも、車両の走行速度に関する情報をコントローラ3に提供する車速センサ31、アクセルペダルの踏み込み量に対応するアクセル開度に関する情報をコントローラ3に提供するアクセル開度センサ32、バッテリの充電状態(SOC:State of Charge)やバッテリ温度に係る情報を含む、バッテリの各種状態に係る情報をコントローラ3に提供するバッテリ状態センサ33、電動モータ16の状態に係る情報、例えば電動モータ16の温度情報を提供するモータ状態センサ34、触媒23の浄化率に関係する情報、例えば触媒23の温度情報を提供する触媒状態センサ35、及び、エンジン11の冷却水温の情報を提供する水温センサ36を含んでいる。コントローラ3は、これらの各センサ31〜36からのセンサ信号を取り入れて演算処理をし、前記エンジン11、BISG21、歯車変速機構12及び電動モータ16の制御を実行する。
【0037】
尚、ここでは、触媒状態センサ35を備えるようにしているが、これの代わりに、例えばエンジン水温や車両(エンジン)の運転状態の履歴情報等から、触媒の温度又は浄化率を推定するようにしてもよい。
【0038】
具体的にコントローラ3は、車速及びアクセル開度に基づいて設定される要求駆動力に応じて、前述したモータ走行状態と併用走行状態とを切り換えるべく、電動モータ16の作動及び停止、エンジン11の作動及び停止(始動及び停止)を切り換える。それと共に、コントローラ3は、走行状態の切り換わりに応じて、変速マップに従った変速制御や、断続手段121によるエンジン11及び駆動輪14間のトルクの断続切替等の、歯車変速機構12の制御を行う。
【0039】
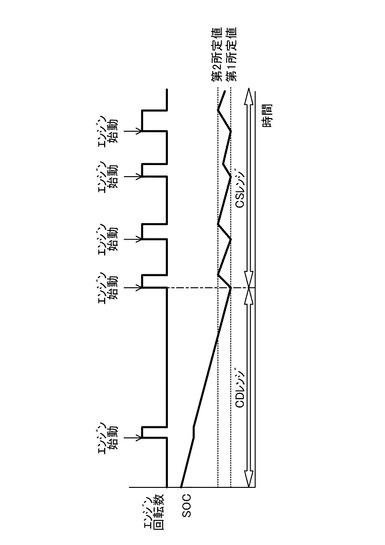
ここで、このハイブリッド自動車は、その構成の図示は省略するが、外部からの給電によってバッテリの充電が可能なプラグインハイブリッド自動車であり、「電池使用走行」又は「プラグイン走行」と言うことができるCDレンジと、「充電維持走行」又は「ハイブリッド走行」と言うことができるCSレンジと、をバッテリのSOCに応じて切り替える(図2参照)。つまり、バッテリのSOCが第1所定値以上であるときは、図2の左側に示すようにCDレンジであり、このCDレンジでは基本的にモータ走行を行い、エンジンの運転は抑制される。例えば外部からの給電によりバッテリの充電が完了した後にハイブリッド自動車を発進した場合は、SOCが第1所定値にまで低下する間はCDレンジになる。CDレンジでは、バッテリの電力消費は許容しつつ、エンジン11の運転によるバッテリの充電は規制されるため、SOCは次第に低下するようになる。そうして、SOCが第1所定値を下回ったときには、ハイブリッド自動車の運転レンジがCSレンジに切り替わる。CSレンジでは、第1所定値と、この第1所定値よりも所定値だけ高い第2所定値との範囲内で、SOCが維持されるように、SOCに応じてエンジン11が頻繁に始動及び運転されてバッテリが充電されることになる。
【0040】
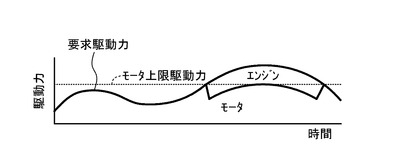
前述したようにCDレンジにおいては、バッテリの電力消費を優先し、エンジン11の運転は抑制されるものの、例えば要求駆動力が所定値以上に高まれば電動モータ16のみでは要求駆動力を充足できなくなるため、図2にも示すように、エンジン11が始動され、そのエンジンの駆動力を補助的に利用することになる。図3は、CDレンジにおける要求駆動力に対する、電動モータ16の駆動力とエンジン11の駆動力との分担例を示している。CDレンジにおいては、電動モータ16の上限駆動力が予め設定されており、要求駆動力がこの上限駆動力以下のときには電動モータ16を運転しかつ、エンジン11を停止することにより、電動モータ16の駆動力のみで要求駆動力を充足させる。ここで、電動モータ16の上限駆動力は、当該電動モータ16の連続定格を基準に設定すればよい。例えば電動モータ16の上限駆動力を当該電動モータ16の連続定格に一致させてもよい。この電動モータ16の上限駆動力は、CDレンジにおいて、要求駆動力に対しモータ走行状態と併用走行状態とを切り替える切替値に相当する。
【0041】
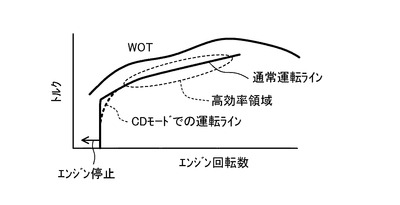
一方、要求駆動力が電動モータ16の上限駆動力を超えたときには、エンジン11が運転され、電動モータ16及びエンジン11の双方の駆動力によって、要求駆動力を充足させる。ここで、図4に示すように、このハイブリッド自動車では、エンジン11の運転を、そのエンジン特性に基づいて効率が高くなるように行う。つまり、エンジン11は、図4において「通常運転ライン」で示される高効率のラインに沿うように運転され、特に同図において破線で示されている、高効率領域が利用される。このため、エンジン11は、所定トルク以上を出力するように運転されることになるから、前述した電動モータ16及びエンジン11の双方の駆動力によって要求駆動力を充足させる場合は、エンジン11の出力を所定値以上に設定する一方で、電動モータ16の出力を低下させることによって要求駆動力を充足させるようにする。尚、低回転域では、エンジン11の効率が低下するため、エンジン11は停止する。また、エンジン11の運転は、CDレンジ及びCSレンジのいずれにおいても、基本的には「通常運転ライン」に沿って行われるが、CDレンジでは、前述の通り、電力消費を許容しかつ燃料消費を抑制する観点から、低回転域においては、破線で示すように、実線のCSレンジでの運転ラインとは別の運転ラインが設定されている。
【0042】
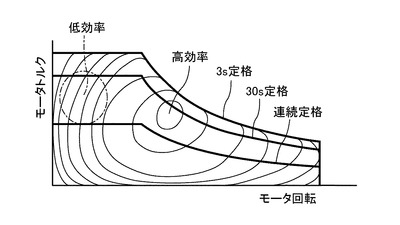
前述したように、CDレンジにおける電動モータ16の上限出力は連続定格によって定められる。図5は、電動モータ16の特性の一例を示しており、同図における「連続定格」のラインは、電動モータ16を連続して運転した場合の上限出力であり、このラインは、電動モータ16内のコイルや永久磁石等の温度限界に起因する電動モータ16の上限温度によって設定される。従って、連続定格は、低回転側は相対的に高く、中回転から高回転側では、回転数が高まれば高まるほど低下する。これに対し「30s定格」のラインは、電動モータ16を30秒間だけ運転するときの上限出力であり、運転時間が短時間に制限される分だけ、連続定格に比べて高くなる。また、「3s定格」は、電動モータ16を3秒間だけ運転するときの上限出力であり、30s定格よりもさらに高くなる。すなわち、電動モータ16の特性上、短時間であれば、より大きなトルクを出力することが可能である。
【0043】
また、図5のモータ特性図には、電動モータ16の等効率線も示しており、電動モータ16は、中回転域で効率が最も高くなり、それよりも回転数が低下すればするほど効率は低下する。つまり、モータ効率の低い低回転域では、電動モータ16の発熱量が大きく、電動モータ16の温度は上昇し易い。ここで、図1に示すように、このハイブリッド自動車では、電動モータ16が、歯車変速機構12よりも駆動力伝達方向の下流側に配置されており、車速とモータ回転数とは比例関係にある。従って、ハイブリッド自動車の低車速域では電動モータ16の回転数が低くなるため、中高車速域よりも電動モータ16の効率が低下することになる。そこで、このハイブリッド自動車では、CDレンジにおいてモータ走行状態と併用走行状態とを切り替える切替値を、車速に応じて変更するようにしている。具体的には、低車速域では切替値を低く、中車速及び高車速域では切替値を、低車速域よりも高く設定する。これによって、低車速域では、要求駆動力が比較的低くても、エンジン11が始動してエンジン11の駆動力が利用されるから、低回転状態の電動モータ16の出力が抑制されて、電動モータ16の温度上昇が抑制される。このような電動モータ16の温度上昇を抑制することは、詳しくは後述するが、電動モータ16の上限出力を高める「待ち時間」、言い換えると触媒23の活性化を図る時間を確保しつつ、エンジン11の始動を待機する時間を、できるだけ長くすることを可能にする。
【0044】
ところで、CDレンジにおいては、エンジン11の運転が抑制されていて、エンジン11は、ほとんど運転されない一方で、要求駆動力が切替値以上になったときにはエンジン11を運転させる必要がある。このときに、触媒23が活性化されていないと、エミッション性能が悪化してしまうことになる。一方で、CDレンジにおいて触媒23の活性状態を維持しようとすれば、要求駆動力の大きさに拘わらず、エンジン11を断続的に運転して触媒23を活性化しなければならない。このことはエンジン11の駆動力がほとんど要求されないCDレンジにおいて、触媒の活性化のためだけの燃料消費量を増大することになる。
【0045】
そこで、このハイブリッド自動車では、CDレンジにおいて触媒23の活性状態を維持することは行わずに、エンジン11の運転が必要となる、比較的高い駆動力が要求されたときに触媒23を活性化させることとして、燃費の向上を図りつつ、エンジン11の運転時には触媒23が活性状態となるため、エミッション性能の向上も図るようにした。
【0046】
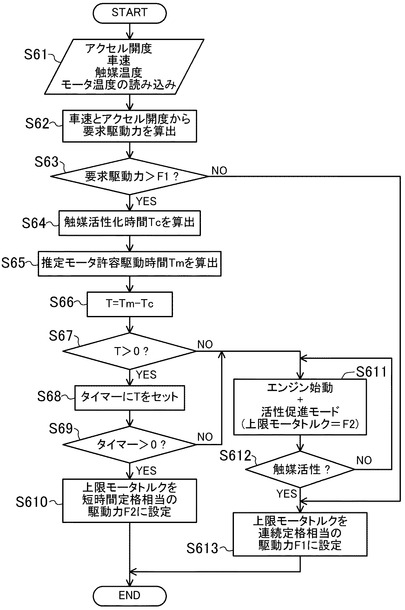
図6は、制御装置CRが実行する、CDレンジにおける電動モータ16の制御に係るフローチャートであり、特にエンジン始動に関連する電動モータ16の制御に係るフローである。まず、このフローはCDレンジにおけるモータ走行状態でスタートし、スタート後のステップS61で、コントローラ3は、各センサ31〜36の情報、少なくともアクセル開度、車速、触媒温度、及び、モータ温度の情報を読み込む。続くステップS62では、読み込んだ車速とアクセル開度から要求駆動力を算出し、ステップS63で、その要求駆動力が、予め設定されている切替値F1を超えているか否かを判定する。切替値F1は、前述したように、CDレンジにおいてモータ走行状態と併用走行状態との切り替えに係り、電動モータ16の、通常の上限駆動力である連続定格に基づいて設定されている(図3参照)。
【0047】
ステップS63で、要求駆動力≦切替値F1のとき(NOのとき)には、ステップS613に移行する。つまり、要求駆動力が低く、モータ走行状態をそのまま継続可能であるから、電動モータ16の上限出力を連続定格相当のF1に設定しかつ、要求駆動力を充足する駆動力を、電動モータ16から出力する。これに対し、ステップS63で、要求駆動力>切替値F1のとき(YESのとき)には、ステップS64に移行する。
【0048】
ステップS64では、読み込んだ触媒23の温度状態に基づいて、その触媒23の活性化に必要な時間Tcを推定する。尚、活性化に必要な時間Tcは、後述するように、エンジン11を触媒23の活性化を促進することにより、触媒の活性化が比較的短時間で可能な活性促進モードで運転した場合に必要な時間であり、予め設定されているモデル式や、マップに基づいて算出すればよい。また、触媒23の温度を直接的に検出するのではなく、前述の通りエンジン水温やエンジン11の運転履歴等から触媒温度の推定、ひいては触媒23の活性化に必要な時間Tcを推定してもよい。
【0049】
続くステップS65では、推定モータ許容駆動時間Tmを算出する。これは、要求駆動力を充足するように(但し、要求駆動力は、前述の通り電動モータ16の連続定格以上である)電動モータ16を運転したしたときに、その出力状態を継続可能な時間に相当する。推定モータ許容駆動時間Tmは、電動モータ16の温度に基づいて、予め設定されているモデル式やマップに基づいて算出すればよい。
【0050】
そうして、ステップS66では、ステップS64及びS65で算出したTc及びTmから、待ち時間Tを算出する(つまり、T=Tm−Tc)。この待ち時間Tは、後述するように、エンジン11を始動するまでの猶予時間に相当する。
【0051】
ステップS67では、算出した待ち時間T>0か否かを判定する。判定がNOのときには、触媒23の活性化に必要な時間を考慮すれば、電動モータ16を、要求駆動力を充足するように運転するだけの時間の猶予がないから、エンジン11を直ちに始動して触媒23の活性化、及び、電動モータ16及びエンジン11による併用走行を行う必要がある。そこで、フローはステップS611に移行をして、エンジン11を始動すると共に、そのエンジン11を触媒23の活性化を促進する活性促進モードで運転する。この活性促進モードは、歯車変速機構12の断続手段121を遮断して、エンジン11を無負荷状態で運転すると共に、その点火時期を大幅に遅角化することによって、排気温度を高めた運転モードである。これによって、エミッション性能の悪化を抑制しながら、触媒23の温度を速やかに高めて、触媒23の活性化を早期に完了することが可能になる。このときに、電動モータ16は、その上限モータトルクを、短時間定格相当の駆動力、つまり要求駆動力を充足可能な駆動力に設定して運転する。これによって、要求駆動力が電動モータ16の連続定格以上であってエンジン11を無負荷運転していても、電動モータ16により、要求駆動力を充足することが可能になる。
【0052】
続くステップS612では、触媒23が活性化したか否かを判定し、触媒23が未活性の間はステップS611を繰り返し、触媒23の活性後に、ステップS613に移行をする。この場合は、電動モータ16の上限出力を連続定格相当のF1に設定しつつ、電動モータ16及びエンジン11で分担して、要求駆動力を充足する。
【0053】
一方、ステップS67の判定がYESのときには、ステップS68に移行をしてモータ運転タイマーに待ち時間Tをセットすると共に、そのタイマーのカウントを開始する。そうして、ステップS69でモータ運転タイマー>0であるか否かを判定する。このモータ運転タイマーは、触媒23の活性化に必要な時間を考慮してエンジン11の始動を遅らせることが可能な猶予時間に相当し、ステップS69において判定がYESのときには、ステップS610に移行して、電動モータ16の上限モータトルクを、短時間定格相当の駆動力F2に設定する。この駆動力F2は、前述した要求駆動力に相当する出力である。要求駆動力が切替値F1以下に低下しないときは、ステップS69でモータ運転タイマー≦0となるまで、上限モータトルクを駆動力F2に設定した状態を維持する。一方、ステップS69でモータ運転タイマー≦0となれば、ステップS611に移行してエンジン11を始動し、前述したように、エンジン11を活性促進モードで運転する。そうして、触媒23が活性化した後に(ステップS612でYESとなった後に)、ステップS613に移行をして、電動モータ16及びエンジン11による併用走行状態とする。
【0054】
尚、ステップS69においてタイマー≦0となる前に要求駆動力が切替値F1以下になったときには、モータ走行状態を継続することが可能であるから、エンジン11の始動を中止して、フローをリターンすればよい。
【0055】
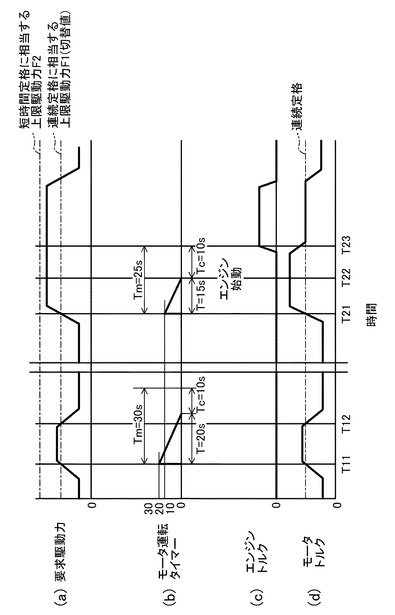
次に、図7に示すタイミングチャートを参照しながら、前述した、CDレンジにおけるエンジン11及び電動モータ16の制御について説明する。先ず、図7(a)に示すように、タイミングT11で、要求駆動力が切替値F1よりも高くなれば(ステップS63でYESとなれば)、待ち時間Tが算出される。図7の左の例では、触媒23の活性化に必要な時間Tcが10秒であり、推定モータ許容駆動時間Tmが30秒であり、それによって、待ち時間Tが30−10=20(秒)に設定されている。そうして、モータ運転タイマー(ここでは、20秒)のカウントが開始される(図7(b)参照)。これと共に、電動モータ16の上限モータトルクは、要求駆動力を充足するように、連続定格よりも高められて、電動モータ16の出力のみによって要求駆動力が充足される(図7(c)のエンジントルク及び(d)のモータトルク参照)。
【0056】
そうして、電動モータ16の出力を高めつつ、エンジン11の始動を待機している間に、言い換えると待ち時間Tが経過する前のタイミングT12で、要求駆動力が切替値F1以下に低下したときには(図7(a)参照)、モータ走行を継続することが可能であるから、エンジン11の始動を中止する。また、電動モータ16の上限モータトルクは、連続定格に相当する駆動力F1に戻される。
【0057】
これに対し図7の右側は、要求駆動力が切替値F1よりも高い状態が、待ち時間Tを経過しても続いている例を示している。つまり、タイミングT21で、要求駆動力が切替値F1を超えたときには、前述したように、待ち時間Tが設定される。この例では、推定モータ許容駆動時間Tmが25秒、触媒23の活性化に必要な時間Tcが10秒にそれぞれ設定され、待ち時間Tが25−10=15(秒)に設定されている。そうして、電動モータ16の上限モータトルクを高めて要求駆動力を充足しながら、エンジン11の始動を遅らせるも、タイミングT22で、待ち時間Tが経過したときには、エンジン11を始動し、活性促進モードで運転する。このことにより、触媒23を早期に活性化させ、推定モータ許容駆動時間Tmが経過する前に、歯車変速機構12の断続手段121をトルク伝達状態に移行する。つまり、電動モータ16及びエンジン11の併用走行状態に移行をして、電動モータ16及びエンジン11により要求駆動力を充足しつつ、電動モータ16の上限モータトルクを連続定格に相当する駆動力F1に変更することが可能になる。
【0058】
以上説明したように、このハイブリッド自動車では、CDモードにおいて、触媒23を活性化状態で維持するのではなく、エンジン11の運転が必要なときに触媒23を活性化させるため、燃料消費量を低減しつつも、エミッション性能の悪化が回避される。
【0059】
特に要求駆動力が切替値F1を超えた時点で直ちにエンジン11を始動するのではなく、触媒23の活性時間を考慮した待ち時間Tだけエンジン11の始動を遅らせることによって、例えば図7の左側に示すように、要求駆動力が低下してエンジン11の運転が不要になったときには無駄なエンジン11の始動乃至暖機、及び、触媒の活性化がなくなるため、CDレンジにおける燃料消費を抑制する上で有利である。
【0060】
また、触媒23の活性に際しては、エンジン11を活性促進モードで、つまりエンジン11を無負荷状態でかつ、点火時期を大幅に遅角化して運転することにより、触媒23の活性化に要する時間ができるだけ短くなるため、前述した待ち時間Tを長くすることができCDレンジにおける燃料消費を抑制する上で有利であると共に、触媒23の活性に必要な燃料量も低減することができる。しかも、触媒23の活性化中におけるエミッションの悪化も抑制することができる。
【0061】
また、前述したように、低車速域において、モータ走行状態と併用走行状態との切替に係る切替値を、中高車速域よりも低下することは電動モータ16の発熱を抑制して、電動モータ16の温度を低く保つから、前述した、推定モータ許容駆動時間Tm、ひいては待ち時間Tをできる限り長くすることを可能にする。このことは、前述したように、CDレンジにおいてエンジン11を無駄に始動し、触媒23を活性化させることを減らす上で有利な構成である。
【0062】
尚、ハイブリッド自動車の構成は、前述した構成に限らず、種々の構成を採用し得る。例えば電動モータ16は、図1の構成では、歯車変速機構12に対し、駆動力伝達方向の下流側に配置しているが、歯車変速機構12に対し、駆動力伝達方向の上流側に電動モータを配設し、電動モータの出力を歯車変速機構12を介して駆動輪14に出力してもよい。
【0063】
また、電動モータ16は、前記のように1つの電動モータからの駆動力を差動装置13を介して、左右の駆動輪14に分配するのではなく、左右の駆動輪14それぞれに独立して駆動力を付与し得るように、少なくとも2つの電動モータを備えてもよい。その場合において、インホイールモータを採用してもよい。
【0064】
さらに、電動モータ16の駆動力は、前輪に付与することに限定されず、後輪に付与してもよい。同様に、エンジン11の駆動力も、前輪に付与することに限定されず、後輪に付与してもよい。ここにおいて、電動モータ16の駆動力を付与する車輪と、エンジン11の駆動力を付与する車輪とは、図1に示すように同じであってもよいし、異なっていても良い(例えばエンジン11の駆動力を前、電動モータ16の駆動力を後、又は、その逆)。例えば電動モータ16の駆動力を後輪に付与する場合においては、電動モータ16を後輪の駆動軸に連結する構成に限らず、ドライブシャフトの途中に電動モータ16を連結してもよい。
【0065】
また、前記のパワートレインPTにおいて、歯車式の多段変速機構に代えて、例えばベルト式等の無段変速機構を採用してもよい。
【0066】
さらに、エンジン11は、火花点火式でなく圧縮着火式エンジン(ディーゼルエンジン)を採用してもよい。その場合、当該圧縮着火式エンジンを活性活性モードで運転するには、例えば噴射時期を変更(遅角化)することによって、燃焼期間を遅らせて排気温度を高めてもよい。
【0067】
加えて、ここに開示した、エンジン11及び電動モータ16の制御は、CDレンジに限定されるものではないが、エンジン11の運転が制限されるようなレンジで行うことが、より効果的である。
【符号の説明】
【0068】
11 エンジン
14 駆動輪(車輪)
16 電動モータ
22 排気通路
23 三元触媒
3 コントローラ
【技術分野】
【0001】
ここに開示する技術は、それぞれ車輪に対し駆動力を出力するモータ及びエンジンを備えたハイブリッド自動車の制御装置に関する。
【背景技術】
【0002】
近年、車両の駆動源としてエンジン及びモータを備えたハイブリッド自動車が普及しつつある(例えば特許文献1、2参照)。これらの特許文献に記載されているハイブリッド自動車では、エンジンを停止しかつモータの駆動力のみにより走行するモータ走行と、エンジンを運転し、そのエンジンの駆動力により走行するエンジン走行(但し、モータの駆動力も併用する場合がある)とを、要求駆動力に応じて切り替えている。
【0003】
このようなハイブリッド自動車は、その走行中にエンジンが断続的に運転されることから、例えば特許文献1には、モータ走行中に、エンジン走行への切替に備えて触媒の活性状態を維持するために、触媒温度が低下してその活性化が必要になったときには、エンジンと駆動輪との間の駆動経路上に配設されたクラッチを開放することによってエンジンを無負荷状態で運転しつつ、その点火時期を遅角化することにより、触媒を早期に活性化する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−92428号公報
【特許文献2】特開2010−76712号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、例えばプラグインハイブリッド自動車では、バッテリの充電状態(State Of Charge:SOC)に応じてCD(Charge Depleting、電池使用)レンジと、CS(Charge Sustaining、充電維持)レンジとを切り替えて走行する。CDレンジは、極力、モータにより走行し、エンジンによる走行を制限する。ここで、特許文献1に記載されている技術のように、触媒温度が低下する度にエンジンを運転して触媒の活性化を図ったのでは、例えばCDレンジにおいてエンジン走行が制限されているにも拘わらず、触媒の活性化が頻繁に行われることになるため、その活性化に費やされる燃料量が増えてしまう。一方で、CDレンジであっても、要求駆動力が大きくてモータの上限出力(例えば、連続定格)を超えてしまうようなときには、エンジンを始動してエンジンの駆動力を車輪に出力しなければならないが、そのエンジンの運転時に触媒が活性化されていないと、エミッション性能が悪化してしまうことになる。
【0006】
ここに開示する技術は、かかる点に鑑みてなされたものであり、その目的とするところは、ハイブリッド自動車において、燃費の悪化とエミッション性能の悪化とを共に回避することにある。
【課題を解決するための手段】
【0007】
本願発明者らは、触媒の活性化に要する時間は比較的短時間(例えば10〜20sec程度)である一方で、モータの出力は、短期間であれば、通常(例えば連続定格)よりも高められる点に着目して、要求駆動力が所定の切替値よりも高いためモータの通常の上限出力では要求駆動力を充足することができず、エンジンの運転が必要なときであって、触媒の活性化が必要なときには、モータの上限出力を短期間だけ高めるようにした。このことによって、エンジンの駆動力を車輪に対して実質的に出力しなくとも、モータの出力によって要求駆動力を充足させる。一方で、エンジンは触媒の活性化を促進する運転モードで運転することにより、触媒を早期に活性化させる。こうして、触媒の活性化後は、少なくともエンジンの駆動力を車輪に出力(エンジンの駆動力のみ、又は、エンジンとモータの駆動力の双方を出力)して、要求駆動力を充足する。このことにより、燃費の悪化とエミッション性能の悪化とを共に回避することが可能になる。
【0008】
具体的に、ここに開示する技術は、ハイブリッド自動車の制御装置に係り、それぞれ車輪に対し駆動力を出力するように構成されたモータ及びエンジンと、前記エンジンの排気通路上に配設された触媒と、要求駆動力に応じて前記エンジン及び前記モータを制御するよう構成されたコントローラと、を備える。
【0009】
前記コントローラは、前記要求駆動力が所定の切替値以下のときには、前記エンジンを停止しかつ前記モータを運転することによって、前記モータの駆動力のみを前記車輪に出力し、前記要求駆動力が前記切替値よりも高いときには、少なくとも前記エンジンを運転することによって、少なくとも前記エンジンの駆動力を前記車輪に出力し、前記コントローラはまた、前記要求駆動力が前記切替値よりも高くかつ前記触媒の活性化が必要なときには、当該触媒が活性化するまでの間、前記モータを、予め定められた上限出力よりも高めて運転しかつ、前記エンジンを前記触媒の活性を促進可能な活性促進モードで運転する。
【0010】
ここで、「触媒の活性を促進可能な活性促進モード」でエンジンを運転することには、公知の様々な手法を採用することが可能であり、当該エンジンが火花点火式エンジンであるときには、例えばその点火時期を遅角化することによって、排気温度を高めるような運転が例示される。また、当該エンジンが圧縮着火式エンジンであるときには、例えばその噴射時期を遅角化する等の方策によって、燃焼時期を遅角化させて排気温度を高めるような運転が例示される。
【0011】
また、活性促進モードでは、エンジンを無負荷又は軽負荷で運転することが、エミッションの悪化を抑制しつつ、触媒を短時間で活性化して燃料消費量を低減する上では望ましい。例えばエンジンと車輪との間の駆動経路上に、エンジントルクの遮断及び接続を切り替え可能な断続手段を設け、当該断続手段によってトルク伝達を遮断することによって、エンジンを無負荷で運転するようにしてもよい。
【0012】
また、「触媒の活性化が必要なとき」とは、触媒の浄化率が予め設定した基準値以下となるようなときであって、例えば触媒の温度によって判断することが可能である。
【0013】
前記の構成によると、要求駆動力が所定の切替値以下のときには、コントローラは、エンジンを停止しかつモータを運転することによって、モータの駆動力のみを車輪に出力する。これはモータ走行状態に相当する。一方、要求駆動力が切替値よりも高いときには、少なくともエンジンを運転することによって、少なくともエンジンの駆動力を車輪に出力する。これは、エンジン及びモータの双方を運転し、それらの駆動力を車輪に出力する併用走行状態としてもよいし、エンジンの駆動力のみを車輪に出力するエンジン走行状態としてもよい。
【0014】
そうして、要求駆動力が切替値よりも高いため、エンジンの運転(つまり始動)が必要で、しかも触媒の活性化が必要なときには、コントローラは、触媒が活性化するまでの間、モータを、予め定められた上限出力よりも高めて運転しながら、エンジンを触媒の活性を促進可能な活性促進モードで運転する。つまり、モータの出力を高めて要求駆動力を充足している間に、エンジンを活性促進モードで運転することによって、触媒の早期活性化を図る。
【0015】
この構成では、例えばモータ走行中に、触媒を活性状態で維持するのではなく、エンジンの運転が必要になったときでかつ触媒の活性化が必要なときに、触媒の活性化を図る。このため、触媒を活性状態で維持するための燃料は不要になる。これは特に、エンジンの運転が制限されるCDレンジにおける燃費の向上に有利になる。
【0016】
また、エンジンを活性促進モードで運転することによって、触媒の活性化を図るため、エミッションの悪化を抑制しながら、触媒を短時間で活性化することが可能になり、燃費の悪化とエミッション性能の悪化とを共に回避する上で有利になる。
【0017】
そうして、触媒を早期に活性化した後にエンジン走行又は併用走行へと移行をすることにより、触媒の活性状態を維持していなくても、エミッション性能の悪化が回避される。
【0018】
従って、前記の構成は特に、エンジンの運転が制限されるCDレンジにおいて燃費の悪化とエミッション性能の悪化とを共に回避する上で有利になる。
【0019】
前記モータの前記上限出力は、当該モータの連続定格であり、前記切替値は、前記モータの前記連続定格によって決定され、前記コントローラは、前記触媒が活性化するまでの間、前記モータを、当該モータの短時間定格に従って運転する、としてもよい。
【0020】
つまり、エンジンの運転及び停止の切替に係る切替値を、モータの連続定格によって決定することにより、例えばCDレンジにおける、エンジンの運転及び停止の切替が適正化される。モータの短時間定格は連続定格よりも高くなるため、要求駆動力が切替値よりも高いときに、そのモータの出力によって要求駆動力を充足することが可能になる。このことは、エンジンを活性促進モードで運転しているときに、そのエンジンを無負荷又は軽負荷で運転することを可能にする。
【0021】
前記コントローラは、低車速域では、前記切替値を中高車速域よりも低く設定する、としてもよい。ここで、「低車速域」「中車速域」「高車速域」はそれぞれ、エンジンの定格回転数を、「低回転域」「中回転域」「高回転域」3つの領域に区分した各領域に対応させることが可能である。
【0022】
この構成は、車速とモータ回転数とが比例するような構成、具体的にはモータが変速機と車輪との間に配置されているような構成において有利な構成である。つまり、モータは一般的に、低回転側において効率が低い、言い換えると発熱量が多くなる。このことは、モータを低回転側で運転したときには、モータ温度が比較的高くなってしまうことを意味する。
【0023】
一方で、モータは連続定格や短時間定格に従って運転されるが、この連続定格や短時間定格は、モータ内のコイルや永久磁石の温度限界に起因するモータの上限温度によって規定される。つまり、モータの温度が高ければ高いほど、モータの上限出力は抑制される。言い換えると、モータを上限出力よりも高めて運転しようとしたときに、モータの温度が高ければ高いほど、その運転可能な時間が短くなってしまう。
【0024】
従って、車速とモータ回転数とが比例するような車両の構成において、低車速域で要求駆動力が高まったときには、エンジンの始動を早めることによって、発熱し易い比較的低回転のモータの出力(但し、通常の上限出力よりも高い出力)をできるだけ低く抑えることが可能になる。その結果モータの温度上昇が抑制されるから、モータを上限出力よりも高めて運転する時間を、できるだけ長くすることが可能になる。
【0025】
前記コントローラは、前記触媒の活性化に必要な時間と、前記モータを前記上限出力よりも高めて前記要求駆動力を充足するように駆動することが可能な連続時間との比較から待ち時間を設定すると共に、前記要求駆動力が前記切替値よりも高い状態が前記待ち時間以上に継続したときに前記エンジンを始動しかつ、当該エンジンを前記活性促進モードで運転する一方、前記待ち時間が経過する前に、前記要求駆動力が前記切替値以下になったときには、前記エンジンを始動しない、としてもよい。
【0026】
この構成は、モータ走行中のエンジンの始動をできるだけ抑制する上で有効であり、例えばモータ温度に基づいて設定することが可能な、当該モータを上限出力よりも高めかつ要求駆動力を充足するように駆動することが可能な連続時間と、触媒の活性化に必要な時間とを比較する。モータの駆動連続時間から触媒活性時間を差し引いた待ち時間は、要求駆動力が切替値よりも高いにも拘わらず、エンジンを始動せずともモータの出力によって要求駆動力を充足することが可能な期間に相当する。
【0027】
要求駆動力が切替値よりも高い状態が待ち時間以上に継続したときには、モータ走行を継続することができず、エンジン走行又は併用走行に切り替える必要があるため、先ずは触媒を活性化すべくエンジンを始動しかつ、そのエンジンを活性促進モードで運転する。そうして、触媒の活性化後に、エンジン走行又は併用走行に切り替えて、要求駆動力を充足する。これによって、エミッション性能の悪化が回避される。
【0028】
一方、待ち時間が経過する前に、要求駆動力が切替値以下になったときには、エンジン走行又は併用走行への切り替えが不要であり、触媒の活性化も不要である。従って、エンジンを始動しないことにより、燃料消費量が抑制される。
【発明の効果】
【0029】
以上説明したように、前記のハイブリッド自動車の制御装置によると、例えばモータ走行中に触媒を活性状態で維持するのではなく、エンジンの運転が必要になったときでかつ触媒の活性化が必要なときに、触媒の活性化を図るため、触媒を活性状態で維持するための燃料は不要になり、燃費の向上に有利になる一方で、エンジンの運転時には触媒が活性化しているから、エミッション性能の向上にも有利になる。
【図面の簡単な説明】
【0030】
【図1】車両のパワートレイン及び制御装置の全体ブロック図である。
【図2】CDレンジとCSモードとのそれぞれについて、エンジン回転数の変化及びバッテリのSOCの変化の一例を示す図である。
【図3】CDレンジにおいて要求駆動力に対するモータの駆動力とエンジンの駆動力との分担の一例を示す図である。
【図4】エンジンの特性マップの一例である。
【図5】モータの特性マップの一例である。
【図6】コントローラが実行する、走行中のエンジン始動に関連するモータ制御に係るフローチャートである。
【図7】(a)要求駆動力、(b)モータ運転タイマー、(c)エンジントルク、(d)モータトルクの変化の一例を示す図である。
【発明を実施するための形態】
【0031】
以下、ハイブリッド自動車の制御装置の実施形態を図面に基づいて説明する。尚、以下の好ましい実施形態の説明は例示である。図1は車両のパワートレイン及び制御装置の全体ブロック図である。パワートレインPTは、駆動力を発生するエンジン11と、このエンジン11に連結されて変速を行う歯車変速機構12と、歯車変速機構12からの出力を受けて左右に駆動力を配分する差動装置13と、差動装置13からの駆動力を受ける左右の駆動輪(例えば前輪)14,14と、エンジン11と歯車変速機構12との間に配置されたトルクコンバータ(流体伝動装置)15と、歯車変速機構12に対して駆動力伝達方向の下流側に配置されかつ差動装置13を通じて前記駆動輪14を駆動する電動モータ16と、を備えている。このハイブリッド自動車は、駆動源としてのエンジン11及び電動モータ16を備えた、いわゆるパラレルハイブリッド自動車であり、後述するように、車速及びアクセル開度に基づいて設定される要求駆動力に応じて、電動モータ16を運転しかつエンジン11を停止させるモータ走行状態と、電動モータ16とエンジン11との双方を運転する併用走行状態との少なくとも2つの走行状態を切り換えながら走行するように構成されている。
【0032】
エンジン11は、詳細な図示は省略するが、例えば4サイクル火花点火式エンジンである。エンジン11は、クランク軸に対しベルトを介して連結された発電機を備えており、この発電機は、スタータ及び発電機を統合したBISG21とされている。エンジン11の排気側に接続された排気通路22上には、排気ガスを浄化する例えば三元触媒23(以下、単に触媒23という)が配設されている。
【0033】
歯車変速機構12は、詳細な図示は省略するが、例えばその内部に、遊星歯車機構と、遊星歯車機構に含まれる各回転要素の回転を選択的に規制する摩擦締結要素として、複数のクラッチ要素及びブレーキ要素とを含んで構成された多段自動変速機として構成されている。この歯車変速機構12においては、複数のクラッチ要素及びブレーキ要素から選択された、少なくとも2つの要素を締結することで、各変速段を実現するように構成されている。つまり、歯車変速機構12は、少なくとも2つの要素を締結することで所定の変速段を実現したドライブ状態と、前記の要素を全て締結しないことによって、エンジン11と駆動輪14との間のトルクの伝達を遮断したニュートラル状態とに切り換わることから、このハイブリッド自動車においては特に、後述するように、歯車変速機構12を、前記の各クラッチ要素及び各ブレーキ要素の開放及び締結を切り換えることによって、エンジン11と駆動輪14との間でトルクを断続させる断続手段121として機能させる。この断続手段121は、車両の走行に連動してエンジン11が引き摺られながら従動回転する引き摺り現象を回避する上で有効である。
【0034】
前記電動モータ16は、例えば3相の交流同期モータであって、図示省略のバッテリ及びインバータを介して供給された駆動電流により駆動する。ここで、前記のモータ走行モードには、電動モータ16の駆動力によって走行している状態、電動モータ16を回生させながら走行している状態、電動モータ16が何ら作動せずに惰性で走行している状態、の少なくとも3つの状態を含む。
【0035】
車両の制御装置CRは、エンジン11の運転(BISG21を通じたエンジン11の始動制御も含む)、前記インバータの制御を通じた電動モータ16の運転(力行及び回生を含む)、歯車変速機構12の変速段等をそれぞれ制御する装置である。制御装置CRは、コントローラ3と、車両の走行状態を含む各種の状態を検出し、コントローラ3に提供する各種センサ31〜36とを備えて構成されている。この内、コントローラ3は、例えば通常のマイクロコンピュータであり、図示は省略するが、少なくともCPU、ROM、RAM、I/Oインターフェース回路、及びデータバスを備えて構成される。
【0036】
各種のセンサには、少なくとも、車両の走行速度に関する情報をコントローラ3に提供する車速センサ31、アクセルペダルの踏み込み量に対応するアクセル開度に関する情報をコントローラ3に提供するアクセル開度センサ32、バッテリの充電状態(SOC:State of Charge)やバッテリ温度に係る情報を含む、バッテリの各種状態に係る情報をコントローラ3に提供するバッテリ状態センサ33、電動モータ16の状態に係る情報、例えば電動モータ16の温度情報を提供するモータ状態センサ34、触媒23の浄化率に関係する情報、例えば触媒23の温度情報を提供する触媒状態センサ35、及び、エンジン11の冷却水温の情報を提供する水温センサ36を含んでいる。コントローラ3は、これらの各センサ31〜36からのセンサ信号を取り入れて演算処理をし、前記エンジン11、BISG21、歯車変速機構12及び電動モータ16の制御を実行する。
【0037】
尚、ここでは、触媒状態センサ35を備えるようにしているが、これの代わりに、例えばエンジン水温や車両(エンジン)の運転状態の履歴情報等から、触媒の温度又は浄化率を推定するようにしてもよい。
【0038】
具体的にコントローラ3は、車速及びアクセル開度に基づいて設定される要求駆動力に応じて、前述したモータ走行状態と併用走行状態とを切り換えるべく、電動モータ16の作動及び停止、エンジン11の作動及び停止(始動及び停止)を切り換える。それと共に、コントローラ3は、走行状態の切り換わりに応じて、変速マップに従った変速制御や、断続手段121によるエンジン11及び駆動輪14間のトルクの断続切替等の、歯車変速機構12の制御を行う。
【0039】
ここで、このハイブリッド自動車は、その構成の図示は省略するが、外部からの給電によってバッテリの充電が可能なプラグインハイブリッド自動車であり、「電池使用走行」又は「プラグイン走行」と言うことができるCDレンジと、「充電維持走行」又は「ハイブリッド走行」と言うことができるCSレンジと、をバッテリのSOCに応じて切り替える(図2参照)。つまり、バッテリのSOCが第1所定値以上であるときは、図2の左側に示すようにCDレンジであり、このCDレンジでは基本的にモータ走行を行い、エンジンの運転は抑制される。例えば外部からの給電によりバッテリの充電が完了した後にハイブリッド自動車を発進した場合は、SOCが第1所定値にまで低下する間はCDレンジになる。CDレンジでは、バッテリの電力消費は許容しつつ、エンジン11の運転によるバッテリの充電は規制されるため、SOCは次第に低下するようになる。そうして、SOCが第1所定値を下回ったときには、ハイブリッド自動車の運転レンジがCSレンジに切り替わる。CSレンジでは、第1所定値と、この第1所定値よりも所定値だけ高い第2所定値との範囲内で、SOCが維持されるように、SOCに応じてエンジン11が頻繁に始動及び運転されてバッテリが充電されることになる。
【0040】
前述したようにCDレンジにおいては、バッテリの電力消費を優先し、エンジン11の運転は抑制されるものの、例えば要求駆動力が所定値以上に高まれば電動モータ16のみでは要求駆動力を充足できなくなるため、図2にも示すように、エンジン11が始動され、そのエンジンの駆動力を補助的に利用することになる。図3は、CDレンジにおける要求駆動力に対する、電動モータ16の駆動力とエンジン11の駆動力との分担例を示している。CDレンジにおいては、電動モータ16の上限駆動力が予め設定されており、要求駆動力がこの上限駆動力以下のときには電動モータ16を運転しかつ、エンジン11を停止することにより、電動モータ16の駆動力のみで要求駆動力を充足させる。ここで、電動モータ16の上限駆動力は、当該電動モータ16の連続定格を基準に設定すればよい。例えば電動モータ16の上限駆動力を当該電動モータ16の連続定格に一致させてもよい。この電動モータ16の上限駆動力は、CDレンジにおいて、要求駆動力に対しモータ走行状態と併用走行状態とを切り替える切替値に相当する。
【0041】
一方、要求駆動力が電動モータ16の上限駆動力を超えたときには、エンジン11が運転され、電動モータ16及びエンジン11の双方の駆動力によって、要求駆動力を充足させる。ここで、図4に示すように、このハイブリッド自動車では、エンジン11の運転を、そのエンジン特性に基づいて効率が高くなるように行う。つまり、エンジン11は、図4において「通常運転ライン」で示される高効率のラインに沿うように運転され、特に同図において破線で示されている、高効率領域が利用される。このため、エンジン11は、所定トルク以上を出力するように運転されることになるから、前述した電動モータ16及びエンジン11の双方の駆動力によって要求駆動力を充足させる場合は、エンジン11の出力を所定値以上に設定する一方で、電動モータ16の出力を低下させることによって要求駆動力を充足させるようにする。尚、低回転域では、エンジン11の効率が低下するため、エンジン11は停止する。また、エンジン11の運転は、CDレンジ及びCSレンジのいずれにおいても、基本的には「通常運転ライン」に沿って行われるが、CDレンジでは、前述の通り、電力消費を許容しかつ燃料消費を抑制する観点から、低回転域においては、破線で示すように、実線のCSレンジでの運転ラインとは別の運転ラインが設定されている。
【0042】
前述したように、CDレンジにおける電動モータ16の上限出力は連続定格によって定められる。図5は、電動モータ16の特性の一例を示しており、同図における「連続定格」のラインは、電動モータ16を連続して運転した場合の上限出力であり、このラインは、電動モータ16内のコイルや永久磁石等の温度限界に起因する電動モータ16の上限温度によって設定される。従って、連続定格は、低回転側は相対的に高く、中回転から高回転側では、回転数が高まれば高まるほど低下する。これに対し「30s定格」のラインは、電動モータ16を30秒間だけ運転するときの上限出力であり、運転時間が短時間に制限される分だけ、連続定格に比べて高くなる。また、「3s定格」は、電動モータ16を3秒間だけ運転するときの上限出力であり、30s定格よりもさらに高くなる。すなわち、電動モータ16の特性上、短時間であれば、より大きなトルクを出力することが可能である。
【0043】
また、図5のモータ特性図には、電動モータ16の等効率線も示しており、電動モータ16は、中回転域で効率が最も高くなり、それよりも回転数が低下すればするほど効率は低下する。つまり、モータ効率の低い低回転域では、電動モータ16の発熱量が大きく、電動モータ16の温度は上昇し易い。ここで、図1に示すように、このハイブリッド自動車では、電動モータ16が、歯車変速機構12よりも駆動力伝達方向の下流側に配置されており、車速とモータ回転数とは比例関係にある。従って、ハイブリッド自動車の低車速域では電動モータ16の回転数が低くなるため、中高車速域よりも電動モータ16の効率が低下することになる。そこで、このハイブリッド自動車では、CDレンジにおいてモータ走行状態と併用走行状態とを切り替える切替値を、車速に応じて変更するようにしている。具体的には、低車速域では切替値を低く、中車速及び高車速域では切替値を、低車速域よりも高く設定する。これによって、低車速域では、要求駆動力が比較的低くても、エンジン11が始動してエンジン11の駆動力が利用されるから、低回転状態の電動モータ16の出力が抑制されて、電動モータ16の温度上昇が抑制される。このような電動モータ16の温度上昇を抑制することは、詳しくは後述するが、電動モータ16の上限出力を高める「待ち時間」、言い換えると触媒23の活性化を図る時間を確保しつつ、エンジン11の始動を待機する時間を、できるだけ長くすることを可能にする。
【0044】
ところで、CDレンジにおいては、エンジン11の運転が抑制されていて、エンジン11は、ほとんど運転されない一方で、要求駆動力が切替値以上になったときにはエンジン11を運転させる必要がある。このときに、触媒23が活性化されていないと、エミッション性能が悪化してしまうことになる。一方で、CDレンジにおいて触媒23の活性状態を維持しようとすれば、要求駆動力の大きさに拘わらず、エンジン11を断続的に運転して触媒23を活性化しなければならない。このことはエンジン11の駆動力がほとんど要求されないCDレンジにおいて、触媒の活性化のためだけの燃料消費量を増大することになる。
【0045】
そこで、このハイブリッド自動車では、CDレンジにおいて触媒23の活性状態を維持することは行わずに、エンジン11の運転が必要となる、比較的高い駆動力が要求されたときに触媒23を活性化させることとして、燃費の向上を図りつつ、エンジン11の運転時には触媒23が活性状態となるため、エミッション性能の向上も図るようにした。
【0046】
図6は、制御装置CRが実行する、CDレンジにおける電動モータ16の制御に係るフローチャートであり、特にエンジン始動に関連する電動モータ16の制御に係るフローである。まず、このフローはCDレンジにおけるモータ走行状態でスタートし、スタート後のステップS61で、コントローラ3は、各センサ31〜36の情報、少なくともアクセル開度、車速、触媒温度、及び、モータ温度の情報を読み込む。続くステップS62では、読み込んだ車速とアクセル開度から要求駆動力を算出し、ステップS63で、その要求駆動力が、予め設定されている切替値F1を超えているか否かを判定する。切替値F1は、前述したように、CDレンジにおいてモータ走行状態と併用走行状態との切り替えに係り、電動モータ16の、通常の上限駆動力である連続定格に基づいて設定されている(図3参照)。
【0047】
ステップS63で、要求駆動力≦切替値F1のとき(NOのとき)には、ステップS613に移行する。つまり、要求駆動力が低く、モータ走行状態をそのまま継続可能であるから、電動モータ16の上限出力を連続定格相当のF1に設定しかつ、要求駆動力を充足する駆動力を、電動モータ16から出力する。これに対し、ステップS63で、要求駆動力>切替値F1のとき(YESのとき)には、ステップS64に移行する。
【0048】
ステップS64では、読み込んだ触媒23の温度状態に基づいて、その触媒23の活性化に必要な時間Tcを推定する。尚、活性化に必要な時間Tcは、後述するように、エンジン11を触媒23の活性化を促進することにより、触媒の活性化が比較的短時間で可能な活性促進モードで運転した場合に必要な時間であり、予め設定されているモデル式や、マップに基づいて算出すればよい。また、触媒23の温度を直接的に検出するのではなく、前述の通りエンジン水温やエンジン11の運転履歴等から触媒温度の推定、ひいては触媒23の活性化に必要な時間Tcを推定してもよい。
【0049】
続くステップS65では、推定モータ許容駆動時間Tmを算出する。これは、要求駆動力を充足するように(但し、要求駆動力は、前述の通り電動モータ16の連続定格以上である)電動モータ16を運転したしたときに、その出力状態を継続可能な時間に相当する。推定モータ許容駆動時間Tmは、電動モータ16の温度に基づいて、予め設定されているモデル式やマップに基づいて算出すればよい。
【0050】
そうして、ステップS66では、ステップS64及びS65で算出したTc及びTmから、待ち時間Tを算出する(つまり、T=Tm−Tc)。この待ち時間Tは、後述するように、エンジン11を始動するまでの猶予時間に相当する。
【0051】
ステップS67では、算出した待ち時間T>0か否かを判定する。判定がNOのときには、触媒23の活性化に必要な時間を考慮すれば、電動モータ16を、要求駆動力を充足するように運転するだけの時間の猶予がないから、エンジン11を直ちに始動して触媒23の活性化、及び、電動モータ16及びエンジン11による併用走行を行う必要がある。そこで、フローはステップS611に移行をして、エンジン11を始動すると共に、そのエンジン11を触媒23の活性化を促進する活性促進モードで運転する。この活性促進モードは、歯車変速機構12の断続手段121を遮断して、エンジン11を無負荷状態で運転すると共に、その点火時期を大幅に遅角化することによって、排気温度を高めた運転モードである。これによって、エミッション性能の悪化を抑制しながら、触媒23の温度を速やかに高めて、触媒23の活性化を早期に完了することが可能になる。このときに、電動モータ16は、その上限モータトルクを、短時間定格相当の駆動力、つまり要求駆動力を充足可能な駆動力に設定して運転する。これによって、要求駆動力が電動モータ16の連続定格以上であってエンジン11を無負荷運転していても、電動モータ16により、要求駆動力を充足することが可能になる。
【0052】
続くステップS612では、触媒23が活性化したか否かを判定し、触媒23が未活性の間はステップS611を繰り返し、触媒23の活性後に、ステップS613に移行をする。この場合は、電動モータ16の上限出力を連続定格相当のF1に設定しつつ、電動モータ16及びエンジン11で分担して、要求駆動力を充足する。
【0053】
一方、ステップS67の判定がYESのときには、ステップS68に移行をしてモータ運転タイマーに待ち時間Tをセットすると共に、そのタイマーのカウントを開始する。そうして、ステップS69でモータ運転タイマー>0であるか否かを判定する。このモータ運転タイマーは、触媒23の活性化に必要な時間を考慮してエンジン11の始動を遅らせることが可能な猶予時間に相当し、ステップS69において判定がYESのときには、ステップS610に移行して、電動モータ16の上限モータトルクを、短時間定格相当の駆動力F2に設定する。この駆動力F2は、前述した要求駆動力に相当する出力である。要求駆動力が切替値F1以下に低下しないときは、ステップS69でモータ運転タイマー≦0となるまで、上限モータトルクを駆動力F2に設定した状態を維持する。一方、ステップS69でモータ運転タイマー≦0となれば、ステップS611に移行してエンジン11を始動し、前述したように、エンジン11を活性促進モードで運転する。そうして、触媒23が活性化した後に(ステップS612でYESとなった後に)、ステップS613に移行をして、電動モータ16及びエンジン11による併用走行状態とする。
【0054】
尚、ステップS69においてタイマー≦0となる前に要求駆動力が切替値F1以下になったときには、モータ走行状態を継続することが可能であるから、エンジン11の始動を中止して、フローをリターンすればよい。
【0055】
次に、図7に示すタイミングチャートを参照しながら、前述した、CDレンジにおけるエンジン11及び電動モータ16の制御について説明する。先ず、図7(a)に示すように、タイミングT11で、要求駆動力が切替値F1よりも高くなれば(ステップS63でYESとなれば)、待ち時間Tが算出される。図7の左の例では、触媒23の活性化に必要な時間Tcが10秒であり、推定モータ許容駆動時間Tmが30秒であり、それによって、待ち時間Tが30−10=20(秒)に設定されている。そうして、モータ運転タイマー(ここでは、20秒)のカウントが開始される(図7(b)参照)。これと共に、電動モータ16の上限モータトルクは、要求駆動力を充足するように、連続定格よりも高められて、電動モータ16の出力のみによって要求駆動力が充足される(図7(c)のエンジントルク及び(d)のモータトルク参照)。
【0056】
そうして、電動モータ16の出力を高めつつ、エンジン11の始動を待機している間に、言い換えると待ち時間Tが経過する前のタイミングT12で、要求駆動力が切替値F1以下に低下したときには(図7(a)参照)、モータ走行を継続することが可能であるから、エンジン11の始動を中止する。また、電動モータ16の上限モータトルクは、連続定格に相当する駆動力F1に戻される。
【0057】
これに対し図7の右側は、要求駆動力が切替値F1よりも高い状態が、待ち時間Tを経過しても続いている例を示している。つまり、タイミングT21で、要求駆動力が切替値F1を超えたときには、前述したように、待ち時間Tが設定される。この例では、推定モータ許容駆動時間Tmが25秒、触媒23の活性化に必要な時間Tcが10秒にそれぞれ設定され、待ち時間Tが25−10=15(秒)に設定されている。そうして、電動モータ16の上限モータトルクを高めて要求駆動力を充足しながら、エンジン11の始動を遅らせるも、タイミングT22で、待ち時間Tが経過したときには、エンジン11を始動し、活性促進モードで運転する。このことにより、触媒23を早期に活性化させ、推定モータ許容駆動時間Tmが経過する前に、歯車変速機構12の断続手段121をトルク伝達状態に移行する。つまり、電動モータ16及びエンジン11の併用走行状態に移行をして、電動モータ16及びエンジン11により要求駆動力を充足しつつ、電動モータ16の上限モータトルクを連続定格に相当する駆動力F1に変更することが可能になる。
【0058】
以上説明したように、このハイブリッド自動車では、CDモードにおいて、触媒23を活性化状態で維持するのではなく、エンジン11の運転が必要なときに触媒23を活性化させるため、燃料消費量を低減しつつも、エミッション性能の悪化が回避される。
【0059】
特に要求駆動力が切替値F1を超えた時点で直ちにエンジン11を始動するのではなく、触媒23の活性時間を考慮した待ち時間Tだけエンジン11の始動を遅らせることによって、例えば図7の左側に示すように、要求駆動力が低下してエンジン11の運転が不要になったときには無駄なエンジン11の始動乃至暖機、及び、触媒の活性化がなくなるため、CDレンジにおける燃料消費を抑制する上で有利である。
【0060】
また、触媒23の活性に際しては、エンジン11を活性促進モードで、つまりエンジン11を無負荷状態でかつ、点火時期を大幅に遅角化して運転することにより、触媒23の活性化に要する時間ができるだけ短くなるため、前述した待ち時間Tを長くすることができCDレンジにおける燃料消費を抑制する上で有利であると共に、触媒23の活性に必要な燃料量も低減することができる。しかも、触媒23の活性化中におけるエミッションの悪化も抑制することができる。
【0061】
また、前述したように、低車速域において、モータ走行状態と併用走行状態との切替に係る切替値を、中高車速域よりも低下することは電動モータ16の発熱を抑制して、電動モータ16の温度を低く保つから、前述した、推定モータ許容駆動時間Tm、ひいては待ち時間Tをできる限り長くすることを可能にする。このことは、前述したように、CDレンジにおいてエンジン11を無駄に始動し、触媒23を活性化させることを減らす上で有利な構成である。
【0062】
尚、ハイブリッド自動車の構成は、前述した構成に限らず、種々の構成を採用し得る。例えば電動モータ16は、図1の構成では、歯車変速機構12に対し、駆動力伝達方向の下流側に配置しているが、歯車変速機構12に対し、駆動力伝達方向の上流側に電動モータを配設し、電動モータの出力を歯車変速機構12を介して駆動輪14に出力してもよい。
【0063】
また、電動モータ16は、前記のように1つの電動モータからの駆動力を差動装置13を介して、左右の駆動輪14に分配するのではなく、左右の駆動輪14それぞれに独立して駆動力を付与し得るように、少なくとも2つの電動モータを備えてもよい。その場合において、インホイールモータを採用してもよい。
【0064】
さらに、電動モータ16の駆動力は、前輪に付与することに限定されず、後輪に付与してもよい。同様に、エンジン11の駆動力も、前輪に付与することに限定されず、後輪に付与してもよい。ここにおいて、電動モータ16の駆動力を付与する車輪と、エンジン11の駆動力を付与する車輪とは、図1に示すように同じであってもよいし、異なっていても良い(例えばエンジン11の駆動力を前、電動モータ16の駆動力を後、又は、その逆)。例えば電動モータ16の駆動力を後輪に付与する場合においては、電動モータ16を後輪の駆動軸に連結する構成に限らず、ドライブシャフトの途中に電動モータ16を連結してもよい。
【0065】
また、前記のパワートレインPTにおいて、歯車式の多段変速機構に代えて、例えばベルト式等の無段変速機構を採用してもよい。
【0066】
さらに、エンジン11は、火花点火式でなく圧縮着火式エンジン(ディーゼルエンジン)を採用してもよい。その場合、当該圧縮着火式エンジンを活性活性モードで運転するには、例えば噴射時期を変更(遅角化)することによって、燃焼期間を遅らせて排気温度を高めてもよい。
【0067】
加えて、ここに開示した、エンジン11及び電動モータ16の制御は、CDレンジに限定されるものではないが、エンジン11の運転が制限されるようなレンジで行うことが、より効果的である。
【符号の説明】
【0068】
11 エンジン
14 駆動輪(車輪)
16 電動モータ
22 排気通路
23 三元触媒
3 コントローラ
【特許請求の範囲】
【請求項1】
それぞれ車輪に対し駆動力を出力するように構成されたモータ及びエンジンと、
前記エンジンの排気通路上に配設された触媒と、
要求駆動力に応じて前記エンジン及び前記モータを制御するよう構成されたコントローラと、を備え、
前記コントローラは、前記要求駆動力が所定の切替値以下のときには、前記エンジンを停止しかつ前記モータを運転することによって、前記モータの駆動力のみを前記車輪に出力し、前記要求駆動力が前記切替値よりも高いときには、少なくとも前記エンジンを運転することによって、少なくとも前記エンジンの駆動力を前記車輪に出力し、
前記コントローラはまた、前記要求駆動力が前記切替値よりも高くかつ前記触媒の活性化が必要なときには、当該触媒が活性化するまでの間、前記モータを、予め定められた上限出力よりも高めて運転しかつ、前記エンジンを前記触媒の活性を促進可能な活性促進モードで運転するハイブリッド自動車の制御装置。
【請求項2】
請求項1に記載のハイブリッド自動車の制御装置において、
前記モータの前記上限出力は、当該モータの連続定格であり、
前記切替値は、前記モータの前記連続定格によって決定され、
前記コントローラは、前記触媒が活性化するまでの間、前記モータを、当該モータの短時間定格に従って運転するハイブリッド自動車の制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド自動車の制御装置において、
前記コントローラは、低車速域では、前記切替値を中高車速域よりも低く設定するハイブリッド自動車の制御装置。
【請求項4】
請求項1〜3のいずれか1項に記載のハイブリッド自動車の制御装置において、
前記コントローラは、前記触媒の活性化に必要な時間と、前記モータを前記上限出力よりも高めて前記要求駆動力を充足するように駆動することが可能な連続時間との比較から待ち時間を設定すると共に、前記要求駆動力が前記切替値よりも高い状態が前記待ち時間以上に継続したときに前記エンジンを始動しかつ、当該エンジンを前記活性促進モードで運転する一方、前記待ち時間が経過する前に、前記要求駆動力が前記切替値以下になったときには、前記エンジンを始動しないハイブリッド自動車の制御装置。
【請求項1】
それぞれ車輪に対し駆動力を出力するように構成されたモータ及びエンジンと、
前記エンジンの排気通路上に配設された触媒と、
要求駆動力に応じて前記エンジン及び前記モータを制御するよう構成されたコントローラと、を備え、
前記コントローラは、前記要求駆動力が所定の切替値以下のときには、前記エンジンを停止しかつ前記モータを運転することによって、前記モータの駆動力のみを前記車輪に出力し、前記要求駆動力が前記切替値よりも高いときには、少なくとも前記エンジンを運転することによって、少なくとも前記エンジンの駆動力を前記車輪に出力し、
前記コントローラはまた、前記要求駆動力が前記切替値よりも高くかつ前記触媒の活性化が必要なときには、当該触媒が活性化するまでの間、前記モータを、予め定められた上限出力よりも高めて運転しかつ、前記エンジンを前記触媒の活性を促進可能な活性促進モードで運転するハイブリッド自動車の制御装置。
【請求項2】
請求項1に記載のハイブリッド自動車の制御装置において、
前記モータの前記上限出力は、当該モータの連続定格であり、
前記切替値は、前記モータの前記連続定格によって決定され、
前記コントローラは、前記触媒が活性化するまでの間、前記モータを、当該モータの短時間定格に従って運転するハイブリッド自動車の制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド自動車の制御装置において、
前記コントローラは、低車速域では、前記切替値を中高車速域よりも低く設定するハイブリッド自動車の制御装置。
【請求項4】
請求項1〜3のいずれか1項に記載のハイブリッド自動車の制御装置において、
前記コントローラは、前記触媒の活性化に必要な時間と、前記モータを前記上限出力よりも高めて前記要求駆動力を充足するように駆動することが可能な連続時間との比較から待ち時間を設定すると共に、前記要求駆動力が前記切替値よりも高い状態が前記待ち時間以上に継続したときに前記エンジンを始動しかつ、当該エンジンを前記活性促進モードで運転する一方、前記待ち時間が経過する前に、前記要求駆動力が前記切替値以下になったときには、前記エンジンを始動しないハイブリッド自動車の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−35386(P2013−35386A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−172604(P2011−172604)
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月8日(2011.8.8)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]