
ハイブリッド自動車
【課題】内燃機関に対する燃料供給を停止した状態で内燃機関をモータリングすることに起因した浄化触媒の温度低下をより適正に抑制する。
【解決手段】浄化触媒133の触媒床温Tcatが予め定められた基準温度Tref以上であると判定されたときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定すると共に(ステップS120,S130)、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いと判定されたときにはバッテリ50の入力制限Winよりも充電電力として大きな値Winpを制御用入力制限Wincとして設定する(ステップS120,S140)。
【解決手段】浄化触媒133の触媒床温Tcatが予め定められた基準温度Tref以上であると判定されたときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定すると共に(ステップS120,S130)、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いと判定されたときにはバッテリ50の入力制限Winよりも充電電力として大きな値Winpを制御用入力制限Wincとして設定する(ステップS120,S140)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド自動車に関する。
【背景技術】
【0002】
従来、排気通路に排気浄化触媒が設けられたエンジンと、エンジンにより駆動可能な発電機と、車両の減速時に駆動輪に回生制動力を付与可能なモータと、発電機およびモータと電力のやり取りが可能なバッテリとを備え、モータによる回生電力がバッテリの受入れ可能電力を超過しているときにはエンジンの燃料噴射を停止すると共に超過分の回生電力を発電機へ供給して発電機によりエンジン回転数を強制的に上昇させる(モータリングする)シリーズ式のハイブリッド自動車が提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、モータリングによるエンジン回転数の上昇量が所定量以上であると予想されるときには、エンジン気筒内の混合気に圧縮上死点前に点火することでモータリングによりクランクシャフトに付与されるトルクの方向とは逆方向のトルクを当該クランクシャフトに付与し、エンジン回転数の過上昇を抑えて減速時に乗員が違和感を感じることを抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−049868号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述のようなハイブリッド自動車では、エンジンの燃料噴射を停止した状態で発電機によりエンジンをモータリングすると、モータリングによるエンジンの回転に伴って多量の吸入空気が燃焼に用いられることなく排気浄化触媒に送られるため、排気浄化触媒の温度が低下するおそれがある。そのため、特許文献1に記載のハイブリッド自動車では、排気浄化触媒の温度が所定の触媒活性化温度以下であるときには、上述のエンジン気筒内の混合気に圧縮上死点前に点火する制御をより頻繁に実行するようにして、エンジンのモータリング中であってもエンジンから高温の排気が排出されやすくすることで排気浄化触媒の温度低下を抑制している。しかしながら、このような制御を実行した場合には、車両の減速中であってもエンジン気筒内で混合気を燃焼させることになるため、燃費の悪化につながってしまうおそれがあり、好ましくない。
【0005】
本発明のハイブリッド自動車は、内燃機関に対する燃料供給を停止した状態で内燃機関をモータリングすることに起因した浄化触媒の温度低下をより適正に抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、内燃機関と、該内燃機関の排気を浄化する浄化触媒を有する浄化装置と、動力を入出力可能な第1電動機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記第1電動機の回転軸とに3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力可能な第2電動機と、前記第1および第2電動機と電力のやり取りが可能な蓄電手段と、前記蓄電手段の状態に基づいて該蓄電手段の充電に許容される電力としての入力制限を設定する入力制限設定手段とを備えたハイブリッド自動車であって、
前記浄化触媒の温度が前記内燃機関に対する燃料供給を停止した状態で前記第1電動機により該内燃機関をモータリングしたときに前記浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには前記設定した入力制限を制御用入力制限として設定すると共に、前記浄化触媒の温度が前記基準温度よりも低いときには前記入力制限よりも充電電力として大きな値を前記制御用入力制限として設定する制御用入力制限設定手段と、
前記駆動軸に要求される要求制動トルクに基づく前記第2電動機の目標回生電力が前記制御用入力制限を超えないときには前記第1電動機による前記内燃機関のモータリングを伴うことなく前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御すると共に、前記目標回生電力が前記制御用入力制限を超えるときには前記内燃機関に対する燃料供給の停止と前記第1電動機による前記内燃機関のモータリングとを伴って前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御する制御手段とを備えることを要旨とする。
【0008】
本発明のハイブリッド自動車では、浄化触媒の温度が内燃機関に対する燃料供給を停止した状態で第1電動機により内燃機関をモータリングしたときに浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには蓄電手段の入力制限を制御用入力制限として設定すると共に、浄化触媒の温度が基準温度よりも低いときには蓄電手段の入力制限よりも充電電力として大きな値を制御用入力制限として設定する。このように、浄化触媒の温度が基準温度よりも低いときには、制御用入力制限を蓄電手段の入力制限よりも充電電力として大きな値に設定することにより、要求制動トルクに基づく第2電動機の目標回生電力が制御用入力制限の範囲内に入りやすくなるため、内燃機関に対する燃料供給を停止した状態で第1電動機により内燃機関がモータリングされるのを抑制し、吸入空気が燃焼に用いられることなく浄化触媒に送られることに起因した浄化触媒の温度低下をより適正に抑制することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る車両としてのハイブリッド自動車20の概略構成図である。
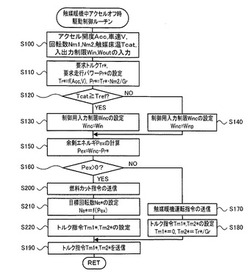
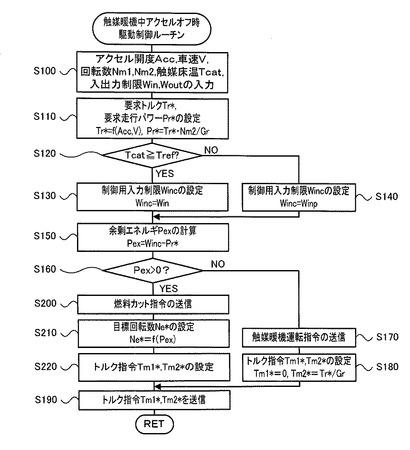
【図2】ハイブリッドECU70により実行される触媒暖機中アクセルオフ時駆動制御ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
図1は、本発明の実施例に係る車両としてのハイブリッド自動車20の概略構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、エンジン22を駆動制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介してキャリア34が接続されたプラネタリギヤ30と、プラネタリギヤ30のサンギヤ31に接続された発電可能なモータMG1と、プラネタリギヤ30のリングギヤ32に接続された駆動軸としてのリングギヤ軸32aに連結された減速ギヤ35と、この減速ギヤ35を介してリングギヤ軸32aに接続されたモータMG2と、リングギヤ軸32aにギヤ機構37およびディファレンシャルギヤ38を介して接続された駆動輪39a,39bと、モータMG1と電力ライン54との間に介設されたインバータ41と、モータMG2と電力ライン54との間に介設されたインバータ42と、インバータ41,42を介してモータMG1およびMG2を駆動制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、電力ライン54に接続された例えばリチウムイオン二次電池あるいはニッケル水素二次電池であるバッテリ50と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)52と、エンジンECU24やモータECU40、バッテリECU52と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを備える。
【0012】
エンジン22からの排気は、一酸化炭素(CO)や炭化水素(HC),窒素酸化物(NOx)の有害成分を浄化する浄化触媒(三元触媒)133を有する浄化装置134を介して外気へ排出される。エンジンECU24には、例えば、エンジン22に吸入される空気の質量流量を検出する図示しないエアフローメータからの吸入空気量、エンジン22の冷却水の温度を検出する図示しない水温センサからの冷却水温、浄化触媒133の温度を検出する触媒温度センサ150からの触媒床温Tcatなどが入力されている。また、エンジンECU24からは、エンジン22を駆動するための種々の制御信号が図示しない出力ポートを介して出力されている。さらに、エンジンECU24は、所定の触媒暖機条件が成立したときに、浄化触媒133の活性化を促進させるために、例えばエンジン22の回転数Neを所定回転数(例えばアイドル時の回転数)に保持しつつ点火時期を通常時よりも大幅に進角させながらエンジン22を運転する触媒暖機運転を実行する。ここで、触媒暖機条件としては、バッテリ50の残容量SOCが所定の暖機実行残容量(例えば30%程度)以上であると共に浄化触媒133の触媒床温Tcatが所定の暖機温度(例えば、触媒暖機運転の実行前であれば300℃程度、触媒暖機運転の実行中であれば400℃程度)以下であること等が挙げられる。
【0013】
モータECU40は、モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号に基づくモータMG1,MG2の回転数Nm1,Nm2といったモータMG1,MG2に関するデータを計算する。バッテリECU52は、バッテリ50を管理するために、バッテリ50の残容量SOCを算出したり、残容量SOCと所定の充放電制約とに基づいてバッテリ50の充放電要求パワーを算出したり、バッテリ50の残容量SOCとバッテリ50の温度とに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出したりする。なお、バッテリ50の入出力制限Win,Woutは、バッテリ50の温度に基づいて入出力制限Win,Woutの基本値を設定すると共に、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定可能である。
【0014】
次に、上述のように構成された実施例のハイブリッド自動車20の動作について説明する。図2は、エンジンECU24によりエンジン22の触媒暖機運転が実行されている最中に運転者によりアクセルペダル83の踏み込みが解除されている際に、ハイブリッドECU70により所定時間毎(例えば数msec毎)に実行される触媒暖機中アクセルオフ時駆動制御ルーチンの一例を示すフローチャートである。
【0015】
図2の触媒暖機中アクセルオフ時駆動制御ルーチンの開始に際して、ハイブリッドECU70の図示しないCPUは、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V、モータMG1,MG2の回転数Nm1,Nm2、バッテリ50の入力制限Winおよび出力制限Wout、浄化触媒133の触媒床温Tcatの値といった駆動制御に必要なデータを入力する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、モータECU40から通信により入力されるものであり、バッテリ50の入力制限Winおよび出力制限Woutは、バッテリECU52から通信により入力されるものであり、浄化触媒133の触媒床温Tcatは触媒温度センサ150により検出されると共にエンジンECU24から通信により入力されるものである。ただし、触媒床温Tcatは、エンジン22の始動後における吸入空気量の積算値とエンジン22の始動時における冷却水温とに基づいてエンジンECU24により演算されたものであってもよい。
【0016】
ステップS100のデータ入力処理の後、アクセル開度Accと車速Vとに基づいて駆動輪39a,39bに連結された駆動軸としてのリングギヤ軸32aに出力すべき要求トルクTr*と走行に要求されるパワーである要求走行パワーPr*とを設定する(ステップS110)。実施例では、アクセル開度Accと車速Vと要求トルクTr*との関係が予め定められて図示しない要求トルク設定用マップとして図示しないROMに記憶されており、与えられたアクセル開度Accと車速Vとに対応した要求トルクTr*が当該マップから導出・設定される。実施例において、アクセルペダル83の踏み込みが解除されているとき、すなわち、アクセル開度Accが値0であるときには、極低速域を除いて要求トルクTr*として負の値である制動トルクが設定される。また、要求走行パワーPr*は、要求トルクTr*にリングギヤ軸32aの回転数Nrを乗じることにより計算され、要求トルクTr*が負の値(制動トルク)であるときに要求トルクTr*のすべてをモータMG2の回生トルクによりまかなうとすれば、モータMG2の目標回生電力を示す。なお、リングギヤ軸32aの回転数Nrは、モータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで割ること(Nr=Nm2/Gr)によって求めたり、車速Vに換算係数kを乗じること(Nr=k・V)によって求めることができる。
【0017】
次に、触媒床温Tcatが基準温度Tref以上であるか否かを判定し(ステップS120)、触媒床温Tcatが基準温度Tref以上であると判定されたときには、ステップS100にて入力したバッテリ50の入力制限Winを制御用入力制限Wincとして設定する(ステップS130)。ここで、制御用入力制限Wincは、触媒暖機中アクセルオフ時駆動制御ルーチンの実行中にバッテリ50の充電に許容される電力であり、負の値となる。一方、触媒床温Tcatが基準温度Trefよりも低いと判定されたときには、入力制限Winよりも充電電力として大きな値Winp(例えば、入力制限Winよりも数kW程度小さい値)を制御用入力制限Wincとして設定する(ステップS140)。ここで、基準温度Trefは、エンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22をモータリングしたときに浄化触媒133の浄化性能を維持できる温度の下限として実験・解析等により予め定められるものであり、実施例では、例えば350℃程度とされる。
【0018】
続いて、ステップS130またはS140にて設定した制御用入力制限Wincから要求走行パワーPr*を減じることにより、余剰パワーPexを計算し(ステップS150)、計算した余剰パワーPexが値0よりも大きいか否かを判定する(ステップS160)。そして、余剰パワーPexが値0以下であると判定されたときには、エンジン22の触媒暖機運転の実行を継続するように触媒暖機運転指令をエンジンECU24に送信する(ステップS170)。そして、モータMG1から入出力すべきトルクとしてのトルク指令Tm1*に値0を設定すると共にモータMG2から入出力すべきトルクとしてのトルク指令Tm2*に要求トルクTr*を減速ギヤ35のギヤ比Grで除したものを設定し(ステップS180)、設定したトルク指令Tm1*,Tm2*をモータECU40に送信して(ステップS190)、本ルーチンを一旦終了する。触媒暖機運転指令を受け取ったエンジンECU24は、エンジン22の触媒暖機運転の実行を継続する。また、トルク指令Tm1*,Tm2*を受け取ったモータECU40は、トルク指令Tm1*,Tm2*に基づいてインバータ41,42を制御する。この場合、要求トルクTr*のすべてがモータMG2により出力されることになるが、余剰パワーPexが値0以下のときには要求トルクTr*が負の値であっても要求走行パワーPr*は充電電力としてWinよりも小さいことになるので、バッテリ50に制御用入力制限Wincを超える電力が入力されることはない。
【0019】
これに対して、ステップS170にて余剰パワーPexが値0よりも大きいと判定されたときには、エンジン22の燃料カット指令をエンジンECU24に送信し(ステップS200)、余剰パワーPexに基づいてエンジン22の目標回転数Ne*を設定する(ステップS210)。実施例では、余剰パワーPexとエンジン22の目標回転数Ne*との関係が予め定められて図示しない目標回転数設定用マップとして図示しないROMに記憶されており、与えられた余剰パワーPexに対応したものが目標回転数Ne*として当該マップから導出・設定される。目標回転数設定用マップは、エンジン22の回転数と燃料カットされた状態のエンジン22から得られるフリクショントルクとの関係を予め実験・解析等により定めたものであり、基本的に余剰パワーPexが大きいほど目標回転数Ne*を大きな値に規定するものとして作成される。
【0020】
エンジン22の目標回転数Ne*を設定したならば、バッテリ50の制御用入力制限Wincと出力制限Woutとの範囲内で、エンジン22の回転数が目標回転数Ne*となるようにするための回転数フィードバック制御によりモータMG1から出力すべきトルクとしてのトルク指令Tm1*を設定し、要求トルクTr*からモータMG1をトルク指令Tm1*で駆動したときにプラネタリギヤ30を介してリングギヤ軸32aに作用するトルクを減じて得られるトルクをモータMG2のトルク指令Tm2*として設定する(ステップS220)。そして、モータMG1,MG2のトルク指令Tm1*およびTm2*をモータECU40に送信して(ステップS190)、本ルーチンを一旦終了する。
【0021】
燃料カット指令を受け取ったエンジンECU24は、エンジン22の燃料噴射を停止するよう燃料噴射弁126を制御する。また、トルク指令Tm1*,Tm2*を受け取ったモータECU40は、トルク指令Tm1*,Tm2*に基づいてインバータ41,42を制御する。こうした制御により、実施例のハイブリッド自動車20では、クランクシャフト26が目標回転数Ne*で回転するように燃料カットされた状態のエンジン22がモータMG1によってモータリングされ、エンジン22のフリクショントルクを駆動軸としてのリングギヤ軸32aに出力すると共に、バッテリ50に制御用入力制限Wincの範囲内で要求トルクTr*に対するフリクショントルクの不足分に相当するトルク(制動トルク)をモータMG2の回生により駆動軸としてのリングギヤ軸32aに出力することが可能となる。
【0022】
以上説明した実施例のハイブリッド自動車20によれば、浄化触媒133の触媒床温Tcatがエンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22をモータリングしたときに浄化触媒133の浄化性能を維持できる温度の下限として予め定められた基準温度Tref以上であると判定されたときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定すると共に(ステップS120,S130)、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いと判定されたときにはバッテリ50の入力制限Winよりも充電電力として大きな値Winpを制御用入力制限Wincとして設定する(ステップS120,S140)。このように、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いときには、制御用入力制限Wincをバッテリ50の入力制限Winよりも充電電力として大きな値Winpに設定することにより、要求トルクTr*に基づく要求走行パワーPr*が制御用入力制限Wincの範囲内に入りやすくなるため、エンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22がモータリングされるのを抑制し、吸入空気が燃焼に用いられることなく浄化触媒133に送られることに起因した浄化触媒133の温度低下をより適正に抑制することができる。なお、このようにバッテリ50の制御用入力制限Wincを入力制限Winよりも充電電力として大きな値Winpに設定することで、要求トルクTr*の大きさによっては、モータMG2から回生されてバッテリ50に入力される電力が入力制限Winを超えるおそれもあるが、短時間であればバッテリ50の劣化にはつながらない。
【0023】
なお、本実施例においては、触媒床温Tcatが基準温度Tref以上であるか否かに基づいて制御用入力制限Wincの値を設定するものとしたが(ステップS120〜S140)、エンジン22の始動後における吸入空気量の積算値が所定の閾値以上であるか否かに基づいて制御用入力制限Wincの値を設定してもよい。すなわち、吸入空気量の積算値が所定の閾値以上であるときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定し、吸入空気量の積算値が所定の閾値よりも小さいときには入力制限Winよりも充電電力として大きな値を制御用入力制限Wincとして設定してもよい。
【0024】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0025】
本発明は、ハイブリッド自動車の製造産業等に利用可能である。
【符号の説明】
【0026】
20 ハイブリッド自動車、22 エンジン、24 エンジンECU、26 クランクシャフト、28 ダンパ、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、34 キャリア、35 減速ギヤ、37 ギヤ機構、38 ディファレンシャルギヤ、39a,39b 駆動輪、40 モータECU、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、52 バッテリECU、54 電力ライン、70 ハイブリッドECU、83 アクセルペダル、84 アクセルペダルポジションセンサ、133 浄化触媒、134 浄化装置、150 触媒温度センサ、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、ハイブリッド自動車に関する。
【背景技術】
【0002】
従来、排気通路に排気浄化触媒が設けられたエンジンと、エンジンにより駆動可能な発電機と、車両の減速時に駆動輪に回生制動力を付与可能なモータと、発電機およびモータと電力のやり取りが可能なバッテリとを備え、モータによる回生電力がバッテリの受入れ可能電力を超過しているときにはエンジンの燃料噴射を停止すると共に超過分の回生電力を発電機へ供給して発電機によりエンジン回転数を強制的に上昇させる(モータリングする)シリーズ式のハイブリッド自動車が提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、モータリングによるエンジン回転数の上昇量が所定量以上であると予想されるときには、エンジン気筒内の混合気に圧縮上死点前に点火することでモータリングによりクランクシャフトに付与されるトルクの方向とは逆方向のトルクを当該クランクシャフトに付与し、エンジン回転数の過上昇を抑えて減速時に乗員が違和感を感じることを抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−049868号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述のようなハイブリッド自動車では、エンジンの燃料噴射を停止した状態で発電機によりエンジンをモータリングすると、モータリングによるエンジンの回転に伴って多量の吸入空気が燃焼に用いられることなく排気浄化触媒に送られるため、排気浄化触媒の温度が低下するおそれがある。そのため、特許文献1に記載のハイブリッド自動車では、排気浄化触媒の温度が所定の触媒活性化温度以下であるときには、上述のエンジン気筒内の混合気に圧縮上死点前に点火する制御をより頻繁に実行するようにして、エンジンのモータリング中であってもエンジンから高温の排気が排出されやすくすることで排気浄化触媒の温度低下を抑制している。しかしながら、このような制御を実行した場合には、車両の減速中であってもエンジン気筒内で混合気を燃焼させることになるため、燃費の悪化につながってしまうおそれがあり、好ましくない。
【0005】
本発明のハイブリッド自動車は、内燃機関に対する燃料供給を停止した状態で内燃機関をモータリングすることに起因した浄化触媒の温度低下をより適正に抑制することを主目的とする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、内燃機関と、該内燃機関の排気を浄化する浄化触媒を有する浄化装置と、動力を入出力可能な第1電動機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記第1電動機の回転軸とに3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力可能な第2電動機と、前記第1および第2電動機と電力のやり取りが可能な蓄電手段と、前記蓄電手段の状態に基づいて該蓄電手段の充電に許容される電力としての入力制限を設定する入力制限設定手段とを備えたハイブリッド自動車であって、
前記浄化触媒の温度が前記内燃機関に対する燃料供給を停止した状態で前記第1電動機により該内燃機関をモータリングしたときに前記浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには前記設定した入力制限を制御用入力制限として設定すると共に、前記浄化触媒の温度が前記基準温度よりも低いときには前記入力制限よりも充電電力として大きな値を前記制御用入力制限として設定する制御用入力制限設定手段と、
前記駆動軸に要求される要求制動トルクに基づく前記第2電動機の目標回生電力が前記制御用入力制限を超えないときには前記第1電動機による前記内燃機関のモータリングを伴うことなく前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御すると共に、前記目標回生電力が前記制御用入力制限を超えるときには前記内燃機関に対する燃料供給の停止と前記第1電動機による前記内燃機関のモータリングとを伴って前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御する制御手段とを備えることを要旨とする。
【0008】
本発明のハイブリッド自動車では、浄化触媒の温度が内燃機関に対する燃料供給を停止した状態で第1電動機により内燃機関をモータリングしたときに浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには蓄電手段の入力制限を制御用入力制限として設定すると共に、浄化触媒の温度が基準温度よりも低いときには蓄電手段の入力制限よりも充電電力として大きな値を制御用入力制限として設定する。このように、浄化触媒の温度が基準温度よりも低いときには、制御用入力制限を蓄電手段の入力制限よりも充電電力として大きな値に設定することにより、要求制動トルクに基づく第2電動機の目標回生電力が制御用入力制限の範囲内に入りやすくなるため、内燃機関に対する燃料供給を停止した状態で第1電動機により内燃機関がモータリングされるのを抑制し、吸入空気が燃焼に用いられることなく浄化触媒に送られることに起因した浄化触媒の温度低下をより適正に抑制することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施例に係る車両としてのハイブリッド自動車20の概略構成図である。
【図2】ハイブリッドECU70により実行される触媒暖機中アクセルオフ時駆動制御ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0010】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0011】
図1は、本発明の実施例に係る車両としてのハイブリッド自動車20の概略構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、エンジン22を駆動制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介してキャリア34が接続されたプラネタリギヤ30と、プラネタリギヤ30のサンギヤ31に接続された発電可能なモータMG1と、プラネタリギヤ30のリングギヤ32に接続された駆動軸としてのリングギヤ軸32aに連結された減速ギヤ35と、この減速ギヤ35を介してリングギヤ軸32aに接続されたモータMG2と、リングギヤ軸32aにギヤ機構37およびディファレンシャルギヤ38を介して接続された駆動輪39a,39bと、モータMG1と電力ライン54との間に介設されたインバータ41と、モータMG2と電力ライン54との間に介設されたインバータ42と、インバータ41,42を介してモータMG1およびMG2を駆動制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、電力ライン54に接続された例えばリチウムイオン二次電池あるいはニッケル水素二次電池であるバッテリ50と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)52と、エンジンECU24やモータECU40、バッテリECU52と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを備える。
【0012】
エンジン22からの排気は、一酸化炭素(CO)や炭化水素(HC),窒素酸化物(NOx)の有害成分を浄化する浄化触媒(三元触媒)133を有する浄化装置134を介して外気へ排出される。エンジンECU24には、例えば、エンジン22に吸入される空気の質量流量を検出する図示しないエアフローメータからの吸入空気量、エンジン22の冷却水の温度を検出する図示しない水温センサからの冷却水温、浄化触媒133の温度を検出する触媒温度センサ150からの触媒床温Tcatなどが入力されている。また、エンジンECU24からは、エンジン22を駆動するための種々の制御信号が図示しない出力ポートを介して出力されている。さらに、エンジンECU24は、所定の触媒暖機条件が成立したときに、浄化触媒133の活性化を促進させるために、例えばエンジン22の回転数Neを所定回転数(例えばアイドル時の回転数)に保持しつつ点火時期を通常時よりも大幅に進角させながらエンジン22を運転する触媒暖機運転を実行する。ここで、触媒暖機条件としては、バッテリ50の残容量SOCが所定の暖機実行残容量(例えば30%程度)以上であると共に浄化触媒133の触媒床温Tcatが所定の暖機温度(例えば、触媒暖機運転の実行前であれば300℃程度、触媒暖機運転の実行中であれば400℃程度)以下であること等が挙げられる。
【0013】
モータECU40は、モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号に基づくモータMG1,MG2の回転数Nm1,Nm2といったモータMG1,MG2に関するデータを計算する。バッテリECU52は、バッテリ50を管理するために、バッテリ50の残容量SOCを算出したり、残容量SOCと所定の充放電制約とに基づいてバッテリ50の充放電要求パワーを算出したり、バッテリ50の残容量SOCとバッテリ50の温度とに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出したりする。なお、バッテリ50の入出力制限Win,Woutは、バッテリ50の温度に基づいて入出力制限Win,Woutの基本値を設定すると共に、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定可能である。
【0014】
次に、上述のように構成された実施例のハイブリッド自動車20の動作について説明する。図2は、エンジンECU24によりエンジン22の触媒暖機運転が実行されている最中に運転者によりアクセルペダル83の踏み込みが解除されている際に、ハイブリッドECU70により所定時間毎(例えば数msec毎)に実行される触媒暖機中アクセルオフ時駆動制御ルーチンの一例を示すフローチャートである。
【0015】
図2の触媒暖機中アクセルオフ時駆動制御ルーチンの開始に際して、ハイブリッドECU70の図示しないCPUは、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V、モータMG1,MG2の回転数Nm1,Nm2、バッテリ50の入力制限Winおよび出力制限Wout、浄化触媒133の触媒床温Tcatの値といった駆動制御に必要なデータを入力する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、モータECU40から通信により入力されるものであり、バッテリ50の入力制限Winおよび出力制限Woutは、バッテリECU52から通信により入力されるものであり、浄化触媒133の触媒床温Tcatは触媒温度センサ150により検出されると共にエンジンECU24から通信により入力されるものである。ただし、触媒床温Tcatは、エンジン22の始動後における吸入空気量の積算値とエンジン22の始動時における冷却水温とに基づいてエンジンECU24により演算されたものであってもよい。
【0016】
ステップS100のデータ入力処理の後、アクセル開度Accと車速Vとに基づいて駆動輪39a,39bに連結された駆動軸としてのリングギヤ軸32aに出力すべき要求トルクTr*と走行に要求されるパワーである要求走行パワーPr*とを設定する(ステップS110)。実施例では、アクセル開度Accと車速Vと要求トルクTr*との関係が予め定められて図示しない要求トルク設定用マップとして図示しないROMに記憶されており、与えられたアクセル開度Accと車速Vとに対応した要求トルクTr*が当該マップから導出・設定される。実施例において、アクセルペダル83の踏み込みが解除されているとき、すなわち、アクセル開度Accが値0であるときには、極低速域を除いて要求トルクTr*として負の値である制動トルクが設定される。また、要求走行パワーPr*は、要求トルクTr*にリングギヤ軸32aの回転数Nrを乗じることにより計算され、要求トルクTr*が負の値(制動トルク)であるときに要求トルクTr*のすべてをモータMG2の回生トルクによりまかなうとすれば、モータMG2の目標回生電力を示す。なお、リングギヤ軸32aの回転数Nrは、モータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで割ること(Nr=Nm2/Gr)によって求めたり、車速Vに換算係数kを乗じること(Nr=k・V)によって求めることができる。
【0017】
次に、触媒床温Tcatが基準温度Tref以上であるか否かを判定し(ステップS120)、触媒床温Tcatが基準温度Tref以上であると判定されたときには、ステップS100にて入力したバッテリ50の入力制限Winを制御用入力制限Wincとして設定する(ステップS130)。ここで、制御用入力制限Wincは、触媒暖機中アクセルオフ時駆動制御ルーチンの実行中にバッテリ50の充電に許容される電力であり、負の値となる。一方、触媒床温Tcatが基準温度Trefよりも低いと判定されたときには、入力制限Winよりも充電電力として大きな値Winp(例えば、入力制限Winよりも数kW程度小さい値)を制御用入力制限Wincとして設定する(ステップS140)。ここで、基準温度Trefは、エンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22をモータリングしたときに浄化触媒133の浄化性能を維持できる温度の下限として実験・解析等により予め定められるものであり、実施例では、例えば350℃程度とされる。
【0018】
続いて、ステップS130またはS140にて設定した制御用入力制限Wincから要求走行パワーPr*を減じることにより、余剰パワーPexを計算し(ステップS150)、計算した余剰パワーPexが値0よりも大きいか否かを判定する(ステップS160)。そして、余剰パワーPexが値0以下であると判定されたときには、エンジン22の触媒暖機運転の実行を継続するように触媒暖機運転指令をエンジンECU24に送信する(ステップS170)。そして、モータMG1から入出力すべきトルクとしてのトルク指令Tm1*に値0を設定すると共にモータMG2から入出力すべきトルクとしてのトルク指令Tm2*に要求トルクTr*を減速ギヤ35のギヤ比Grで除したものを設定し(ステップS180)、設定したトルク指令Tm1*,Tm2*をモータECU40に送信して(ステップS190)、本ルーチンを一旦終了する。触媒暖機運転指令を受け取ったエンジンECU24は、エンジン22の触媒暖機運転の実行を継続する。また、トルク指令Tm1*,Tm2*を受け取ったモータECU40は、トルク指令Tm1*,Tm2*に基づいてインバータ41,42を制御する。この場合、要求トルクTr*のすべてがモータMG2により出力されることになるが、余剰パワーPexが値0以下のときには要求トルクTr*が負の値であっても要求走行パワーPr*は充電電力としてWinよりも小さいことになるので、バッテリ50に制御用入力制限Wincを超える電力が入力されることはない。
【0019】
これに対して、ステップS170にて余剰パワーPexが値0よりも大きいと判定されたときには、エンジン22の燃料カット指令をエンジンECU24に送信し(ステップS200)、余剰パワーPexに基づいてエンジン22の目標回転数Ne*を設定する(ステップS210)。実施例では、余剰パワーPexとエンジン22の目標回転数Ne*との関係が予め定められて図示しない目標回転数設定用マップとして図示しないROMに記憶されており、与えられた余剰パワーPexに対応したものが目標回転数Ne*として当該マップから導出・設定される。目標回転数設定用マップは、エンジン22の回転数と燃料カットされた状態のエンジン22から得られるフリクショントルクとの関係を予め実験・解析等により定めたものであり、基本的に余剰パワーPexが大きいほど目標回転数Ne*を大きな値に規定するものとして作成される。
【0020】
エンジン22の目標回転数Ne*を設定したならば、バッテリ50の制御用入力制限Wincと出力制限Woutとの範囲内で、エンジン22の回転数が目標回転数Ne*となるようにするための回転数フィードバック制御によりモータMG1から出力すべきトルクとしてのトルク指令Tm1*を設定し、要求トルクTr*からモータMG1をトルク指令Tm1*で駆動したときにプラネタリギヤ30を介してリングギヤ軸32aに作用するトルクを減じて得られるトルクをモータMG2のトルク指令Tm2*として設定する(ステップS220)。そして、モータMG1,MG2のトルク指令Tm1*およびTm2*をモータECU40に送信して(ステップS190)、本ルーチンを一旦終了する。
【0021】
燃料カット指令を受け取ったエンジンECU24は、エンジン22の燃料噴射を停止するよう燃料噴射弁126を制御する。また、トルク指令Tm1*,Tm2*を受け取ったモータECU40は、トルク指令Tm1*,Tm2*に基づいてインバータ41,42を制御する。こうした制御により、実施例のハイブリッド自動車20では、クランクシャフト26が目標回転数Ne*で回転するように燃料カットされた状態のエンジン22がモータMG1によってモータリングされ、エンジン22のフリクショントルクを駆動軸としてのリングギヤ軸32aに出力すると共に、バッテリ50に制御用入力制限Wincの範囲内で要求トルクTr*に対するフリクショントルクの不足分に相当するトルク(制動トルク)をモータMG2の回生により駆動軸としてのリングギヤ軸32aに出力することが可能となる。
【0022】
以上説明した実施例のハイブリッド自動車20によれば、浄化触媒133の触媒床温Tcatがエンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22をモータリングしたときに浄化触媒133の浄化性能を維持できる温度の下限として予め定められた基準温度Tref以上であると判定されたときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定すると共に(ステップS120,S130)、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いと判定されたときにはバッテリ50の入力制限Winよりも充電電力として大きな値Winpを制御用入力制限Wincとして設定する(ステップS120,S140)。このように、浄化触媒133の触媒床温Tcatが基準温度Trefよりも低いときには、制御用入力制限Wincをバッテリ50の入力制限Winよりも充電電力として大きな値Winpに設定することにより、要求トルクTr*に基づく要求走行パワーPr*が制御用入力制限Wincの範囲内に入りやすくなるため、エンジン22に対する燃料供給を停止した状態でモータMG1によりエンジン22がモータリングされるのを抑制し、吸入空気が燃焼に用いられることなく浄化触媒133に送られることに起因した浄化触媒133の温度低下をより適正に抑制することができる。なお、このようにバッテリ50の制御用入力制限Wincを入力制限Winよりも充電電力として大きな値Winpに設定することで、要求トルクTr*の大きさによっては、モータMG2から回生されてバッテリ50に入力される電力が入力制限Winを超えるおそれもあるが、短時間であればバッテリ50の劣化にはつながらない。
【0023】
なお、本実施例においては、触媒床温Tcatが基準温度Tref以上であるか否かに基づいて制御用入力制限Wincの値を設定するものとしたが(ステップS120〜S140)、エンジン22の始動後における吸入空気量の積算値が所定の閾値以上であるか否かに基づいて制御用入力制限Wincの値を設定してもよい。すなわち、吸入空気量の積算値が所定の閾値以上であるときにはバッテリ50の入力制限Winを制御用入力制限Wincとして設定し、吸入空気量の積算値が所定の閾値よりも小さいときには入力制限Winよりも充電電力として大きな値を制御用入力制限Wincとして設定してもよい。
【0024】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0025】
本発明は、ハイブリッド自動車の製造産業等に利用可能である。
【符号の説明】
【0026】
20 ハイブリッド自動車、22 エンジン、24 エンジンECU、26 クランクシャフト、28 ダンパ、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、34 キャリア、35 減速ギヤ、37 ギヤ機構、38 ディファレンシャルギヤ、39a,39b 駆動輪、40 モータECU、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、52 バッテリECU、54 電力ライン、70 ハイブリッドECU、83 アクセルペダル、84 アクセルペダルポジションセンサ、133 浄化触媒、134 浄化装置、150 触媒温度センサ、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
内燃機関と、該内燃機関の排気を浄化する浄化触媒を有する浄化装置と、動力を入出力可能な第1電動機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記第1電動機の回転軸とに3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力可能な第2電動機と、前記第1および第2電動機と電力のやり取りが可能な蓄電手段と、前記蓄電手段の状態に基づいて該蓄電手段の充電に許容される電力としての入力制限を設定する入力制限設定手段とを備えたハイブリッド自動車であって、
前記浄化触媒の温度が前記内燃機関に対する燃料供給を停止した状態で前記第1電動機により該内燃機関をモータリングしたときに前記浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには前記設定した入力制限を制御用入力制限として設定すると共に、前記浄化触媒の温度が前記基準温度よりも低いときには前記入力制限よりも充電電力として大きな値を前記制御用入力制限として設定する制御用入力制限設定手段と、
前記駆動軸に要求される要求制動トルクに基づく前記第2電動機の目標回生電力が前記制御用入力制限を超えないときには前記第1電動機による前記内燃機関のモータリングを伴うことなく前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御すると共に、前記目標回生電力が前記制御用入力制限を超えるときには前記内燃機関に対する燃料供給の停止と前記第1電動機による前記内燃機関のモータリングとを伴って前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御する制御手段とを備えるハイブリッド自動車。
【請求項1】
内燃機関と、該内燃機関の排気を浄化する浄化触媒を有する浄化装置と、動力を入出力可能な第1電動機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記第1電動機の回転軸とに3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力可能な第2電動機と、前記第1および第2電動機と電力のやり取りが可能な蓄電手段と、前記蓄電手段の状態に基づいて該蓄電手段の充電に許容される電力としての入力制限を設定する入力制限設定手段とを備えたハイブリッド自動車であって、
前記浄化触媒の温度が前記内燃機関に対する燃料供給を停止した状態で前記第1電動機により該内燃機関をモータリングしたときに前記浄化触媒の浄化性能を維持できる温度の下限として予め定められた基準温度以上であるときには前記設定した入力制限を制御用入力制限として設定すると共に、前記浄化触媒の温度が前記基準温度よりも低いときには前記入力制限よりも充電電力として大きな値を前記制御用入力制限として設定する制御用入力制限設定手段と、
前記駆動軸に要求される要求制動トルクに基づく前記第2電動機の目標回生電力が前記制御用入力制限を超えないときには前記第1電動機による前記内燃機関のモータリングを伴うことなく前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御すると共に、前記目標回生電力が前記制御用入力制限を超えるときには前記内燃機関に対する燃料供給の停止と前記第1電動機による前記内燃機関のモータリングとを伴って前記制御用入力制限の範囲内で前記要求制動トルクに基づく制動トルクが前記駆動軸に出力されるよう前記内燃機関と前記第1および第2電動機とを制御する制御手段とを備えるハイブリッド自動車。
【図1】



【図2】
【図2】
【公開番号】特開2011−110997(P2011−110997A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−267784(P2009−267784)
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月25日(2009.11.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]