
ハイブリッド自動車
【課題】吸気温が低く内燃機関から過大なパワーが出力されるために内燃機関の運転を制限する制御を行なう場合に安定して制限する制御から通常の制御に移行させる。
【解決手段】処理ルーチンをN回実行する時間毎にその間に記憶された吸気温Ta(n)のうち最小のものを目標温度Ta*として設定すると共に(S350)、設定用温度Tsetをレートリミット処理により目標温度Ta*とし(S370〜S390)、設定用温度Tsetが閾値Tref未満のときには設定用温度Tsetに基づく制限パワーPlimと制限回転数Nlimの運転領域内でエンジンを運転しながら走行するよう制御し(S420)、設定用温度Tsetが閾値Tref以上のときには定格値としての最大パワーと最大回転数とを制限パワーPlimと制限回転数Nlimとして用いた運転領域内でエンジンを運転しながら走行するよう制御する(S410)。
【解決手段】処理ルーチンをN回実行する時間毎にその間に記憶された吸気温Ta(n)のうち最小のものを目標温度Ta*として設定すると共に(S350)、設定用温度Tsetをレートリミット処理により目標温度Ta*とし(S370〜S390)、設定用温度Tsetが閾値Tref未満のときには設定用温度Tsetに基づく制限パワーPlimと制限回転数Nlimの運転領域内でエンジンを運転しながら走行するよう制御し(S420)、設定用温度Tsetが閾値Tref以上のときには定格値としての最大パワーと最大回転数とを制限パワーPlimと制限回転数Nlimとして用いた運転領域内でエンジンを運転しながら走行するよう制御する(S410)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド自動車に関し、詳しくは、内燃機関と、発電機と、発電機の回転軸と内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、発電機および電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車に関する。
【背景技術】
【0002】
従来、この種のハイブリッド自動車としては、エンジンと、モータMG1と、エンジンとモータMG1と車軸とに3つの回転要素が接続された遊星歯車機構と、車軸側にパワーを出力するモータMG2と、二つのモータMG1,MG2と電力のやりとりを行なうバッテリとを備えるハイブリッド自動車において、エンジンの吸気温度が比較的低温度として設定された基準温度未満のときには、モータMG1の許容回転数として通常時用の許容回転数より小さい制御上の許容回転数の範囲内でのモータMG1の目標回転数の設定を伴ってエンジンと二つのモータとを制御するものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、上述の制御を行なうことにより、エンジンの吸気温度が低いときに、吸入空気の密度が高くなるためにエンジンから出力されるパワーが過大となることに伴ってモータMG1が過回転するのを抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−203994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のハイブリッド自動車では、停車中ではエンジンルームに外気の流入が穏やかになるためにエンジンルーム内が暖機されてエンジンの吸気温度が徐々に上昇するが、発進して走行すると外気がエンジンルームに流入して吸気温度が低下するため、エンジンの吸気温度が基準温度以上となったり基準温度未満となったりして、モータの許容回転数が頻繁に通常時用の許容回転数となったりそれより小さい制御上の許容回転数となったりする場合が生じ、エンジンやモータの制御にハンチングを生じさせてしまう。
【0005】
本発明のハイブリッド自動車は、内燃機関と、発電機と、発電機の回転軸と内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、発電機および電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、内燃機関の吸気温が低く内燃機関から過大なパワーが出力されるために内燃機関の運転を制限する制御を行なう場合には、安定して制限する制御から通常の制御に移行させることを主目的とする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、
内燃機関と、発電機と、前記発電機の回転軸と前記内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、前記発電機および前記電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、
前記内燃機関の吸入空気の温度である吸気温を検出する吸気温検出手段と、
所定時間毎に該所定時間内で前記検出された吸気温の最低値を設定用温度として設定する設定用温度設定手段と、
前記設定された設定用温度が比較的低い温度として予め設定された所定温度未満のときに、前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大回転数より小さな制限回転数を設定する制限値設定手段と、
前記設定された設定用温度が前記所定温度以上のときには前記内燃機関の定格値としての最大パワーを前記制限パワーとして用いると共に前記内燃機関の定格値としての最大回転数を前記制限回転数として用いて前記制限パワー以下且つ前記制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御し、前記設定された設定用温度が前記所定温度未満のときには前記設定された制限パワー以下且つ前記設定された制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御する制御手段と、
を備えることを要旨とする。
【0008】
この本発明のハイブリッド自動車では、所定時間毎に所定時間内で検出される内燃機関の吸入空気の温度である吸気温の最低値として設定される設定用温度が比較的低い温度として予め設定された所定温度以上のときには、内燃機関の定格値としての最大パワーを制限パワーとして用いると共に内燃機関の定格値としての最大回転数を制限回転数として用いて制限パワー以下且つ制限回転数以下の運転領域の範囲内で内燃機関が運転されて走行するよう内燃機関と発電機と電動機とを制御する。一方、設定用温度が所定温度未満のときには、設定用温度が低いほど小さくなる傾向に内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に設定用温度が低いほど小さくなる傾向に内燃機関の定格値としての最大回転数より小さな制限回転数を設定し、この設定した制限パワー以下且つ設定した制限回転数以下の運転領域の範囲内で内燃機関が運転されて走行するよう内燃機関と発電機と電動機とを制御する。この本発明のハイブリッド自動車では、吸気温が所定温度未満の低温のときには、設定用温度が所定温度未満として設定されるから、設定用温度によって設定された制限パワーと制限回転数とに基づく運転領域の範囲内で内燃機関が運転されて走行するよう制御される。そして、気温が上昇して所定時間以上に亘って安定して所定温度以上に至ると、設定用温度は所定温度以上として設定されるから、定格値としての最大パワーと最大回転数とに基づく運転領域の範囲内で内燃機関が運転されて走行するよう制御される。この結果、内燃機関の吸気温が所定温度未満の状態から吸気温が安定して所定温度以上の状態に至る際に、内燃機関から出力するパワーと内燃機関の回転数とに定格値より厳しい制限を課す制御と内燃機関から出力するパワーと内燃機関の回転数とに定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0009】
こうした本発明のハイブリッド自動車において、前記設定用温度設定手段は、前記設定用温度を設定する際にそれまでに設定されていた設定用温度より所定値以上異なる温度を前記設定用温度として設定するときには、緩変化処理を用いて温度が徐々に変化するよう前記設定用温度を設定する手段である、ものとすることもできる。こうすれば、設定用温度の急変を抑止することができ、制限パワーや制限回転数の急変を抑止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
【図2】エンジン22が運転されているときにハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図3】エンジンECU24により実行される制限値設定処理ルーチンの一例を示すフローチャートである。
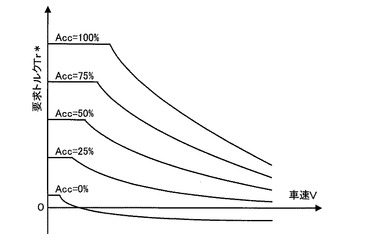
【図4】要求トルク設定用マップの一例を示す説明図である。
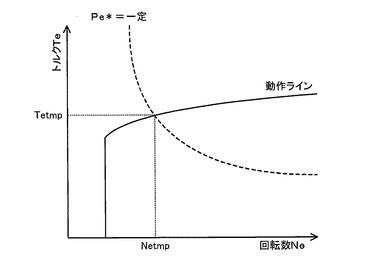
【図5】エンジン22の動作ラインの一例を示す説明図である。
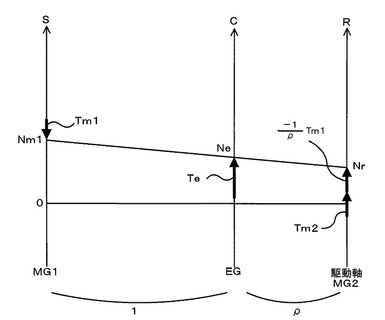
【図6】エンジン22からパワーを出力している状態で走行しているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図7】トルク制限Tm1min,Tm1maxを設定する様子を説明する説明図である。
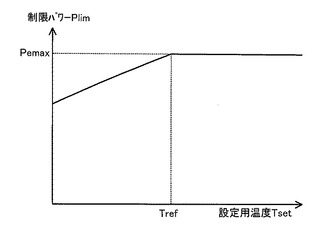
【図8】制限パワー設定用マップの一例を示す説明図である。
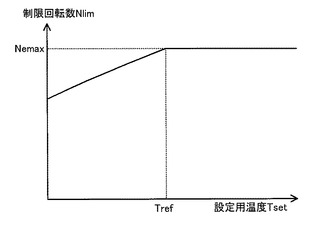
【図9】制限回転数設定用マップの一例を示す説明図である。
【発明を実施するための形態】
【0011】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0012】
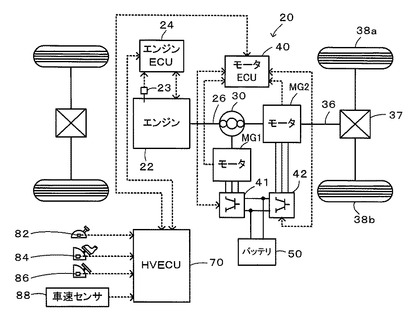
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、吸気温Taを検出する温度センサ23などのエンジン22の運転状態を検出するセンサからの検出値に基づいてエンジン22を駆動制御するエンジン用電子制御ユニット(以下、エンジンECUという。)24と、エンジン22のクランクシャフト26にキャリアが接続されると共に駆動輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36にリングギヤが接続されたプラネタリギヤ30と、例えば同期発電電動機として構成されて回転子がプラネタリギヤ30のサンギヤに接続されたモータMG1と、例えば同期発電電動機として構成されて回転子が駆動軸36に接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42の図示しないスイッチング素子をスイッチング制御することによってモータMG1,MG2を駆動制御するモータ用電子制御ユニット(以下、モータECUという。)40と、インバータ41,42を介してモータMG1,MG2と電力をやりとりするバッテリ50と、シフトレバーのポジションを検出するシフトポジションセンサ82からのシフトポジションやアクセルペダルの踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度,ブレーキペダルの踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキポジション,車速センサ88からの車速を入力すると共にエンジンECU24やモータECU40と通信して車両全体を制御するハイブリッド用電子制御ユニット70と、を備える。
【0013】
図2はエンジン22が運転されているときにハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートであり、図3は図2の駆動制御ルーチンで用いられる制限パワーPlimと制限回転数Nlimとを設定するためにエンジンECU24により実行される制限値設定処理ルーチンの一例を示すフローチャートである。駆動制御ルーチンや制限値設定処理ルーチンは、所定時間毎(例えば、数msec毎や数十msec毎)に繰り返し実行される。ここで、制限パワーPlimは、エンジン22から出力してもよいパワーの上限値として設定されるものであり、制限回転数Nlimは、エンジン22を回転させてもよい回転数の上限値として設定されるものである。制限パワーPlim,制限回転数Nlimの詳細については後述する。以下に、まず、図2を用いてハイブリッド自動車20の駆動制御を簡単に説明し、その後、図3を用いて制限パワーPlimと制限回転数Nlimとを設定する制限値設定処理について詳述する。
【0014】
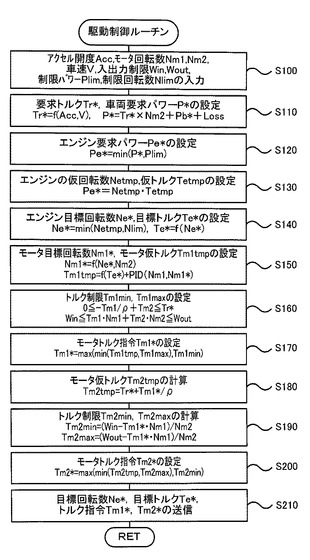
図2の駆動制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2の回転数Nm1,Nm2,バッテリ50の入出力制限Win,Wout,制限パワーPlim,制限回転数Nlimなど制御に必要なデータを入力し(ステップS100)、アクセル開度Accと車速Vと図4に例示する要求トルク設定用マップとに基づいて車両に要求されるトルクとして駆動輪38a,38bに連結された駆動軸36に出力すべき要求トルクTr*を設定すると共に設定した要求トルクTr*に駆動軸36の回転数(モータMG2の回転数Nm2)を乗じたものとバッテリ50が要求する充放電要求パワーPb*と損失としてのロスLossとの和として計算される車両要求パワーP*を設定する(ステップS120)。
【0015】
続いて、設定した車両要求パワーP*と制限パワーPlimとのうち小さい方を、即ち、車両要求パワーP*を制限パワーPlimで制限した値をエンジン22から出力すべきエンジン要求パワーPe*として設定すると共に(ステップS130)、このエンジン要求パワーPe*と図5に例示するエンジン22を効率よく動作させる動作ラインとに基づいてエンジン22を運転すべき仮の回転数Netmpと仮のトルクTetmpとを設定する(ステップS140)。そして、仮の回転数Netmpと制限回転数Nlimとのうち小さい方を、即ち、仮の回転数Netmpを制限回転数Nlimで制限した値をエンジン22の目標回転数Ne*として設定すると共に設定した目標回転数Ne*と図5の動作ラインとによってエンジン22の目標トルクTe*を設定する(ステップS140)。
【0016】
次に、エンジン22の目標回転数Ne*とモータMG2の回転数Nm2とプラネタリギヤ30のギヤ比ρとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と入力したモータMG1の回転数Nm1とに基づいて式(2)によりモータMG1から出力すべきトルクの仮の値である仮トルクTm1tmpを計算する(ステップS150)。ここで、式(1)は、プラネタリギヤ30の回転要素に対する力学的な関係式である。エンジン22からパワーを出力している状態で走行しているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図を図6に示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤの回転数を示し、C軸はエンジン22の回転数Neであるキャリアの回転数を示し、R軸はモータMG2の回転数Nm2である駆動軸36の回転数Ndを示す。式(1)は、この共線図を用いれば容易に導くことができる。なお、R軸上の2つの太線矢印は、モータMG1から出力されたトルクTm1が駆動軸36に作用するトルクと、モータMG2から駆動軸36に出力されるトルクTm2とを示す。また、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0017】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/ρ (1)
Tm1tmp=ρ・Te*/(1+ρ)+k1(Nm1*-Nm1)+k2∫(Nm1*-Nm1)dt (2)
【0018】
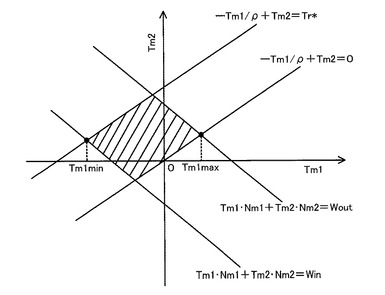
続いて、式(3)および式(4)を共に満たすモータMG1から出力してもよいトルクの上下限としてのトルク制限Tm1min,Tm1maxを設定し(ステップS160)、設定した仮トルクTm1tmpを式(5)によりトルク制限Tm1min,Tm1maxで制限してモータMG1のトルク指令Tm1*を設定する(ステップ170)。ここで、式(3)はモータMG1やモータMG2により駆動軸36に出力されるトルクの総和が値0から要求トルクTr*までの範囲内となる関係であり、式(4)はモータMG1とモータMG2とにより入出力される電力の総和が入出力制限Win,Woutの範囲内となる関係である。トルク制限Tm1min,Tm1maxの一例を図7に示す。トルク制限Tm1min,Tm1maxは、図中斜線で示した領域内のトルク指令Tm1*の最大値と最小値として求めることができる。
【0019】
0≦−Tm1/ρ+Tm2≦Tr* (3)
Win≦Tm1・Nm1+Tm2・Nm2≦Wout (4)
Tm1*=max(min(Tm1tmp,Tm1max),Tm1min) (5)
【0020】
そして、要求トルクTr*に設定したトルク指令Tm1*をプラネタリギヤ30のギヤ比ρで除したものを加えてモータMG2から出力すべきトルクの仮の値である仮トルクTm2tmpを次式(6)により計算すると共に(ステップS180)、バッテリ50の入出力制限Win,Woutと設定したトルク指令Tm1*に現在のモータMG1の回転数Nm1を乗じて得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で割ることによりモータMG2から出力してもよいトルクの上下限としてのトルク制限Tm2min,Tm2maxを次式(7)および式(8)により計算すると共に(ステップS190)、設定した仮トルクTm2tmpを式(9)によりトルク制限Tm2min,Tm2maxで制限してモータMG2のトルク指令Tm2*を設定する(ステップS200)。ここで、式(6)は、図6の共線図から容易に導くことができる。
【0021】
Tm2tmp=Tr*+Tm1*/ρ (6)
Tm2min=(Win-Tm1*・Nm1)/Nm2 (7)
Tm2max=(Wout-Tm1*・Nm1)/Nm2 (8)
Tm2*=max(min(Tm2tmp,Tm2max),Tm2min) (9)
【0022】
こうしてエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信し(ステップS210)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における吸入空気量制御や燃料噴射制御,点火制御などの制御を行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。こうした制御により、エンジン22を制限パワーPlim以下で且つ制限回転数Nlim以下の運転領域内でエンジン22を効率よく運転しながらバッテリ50の入出力制限Win,Woutの範囲内で駆動軸36に要求トルクTr*を出力して走行することができる。
【0023】
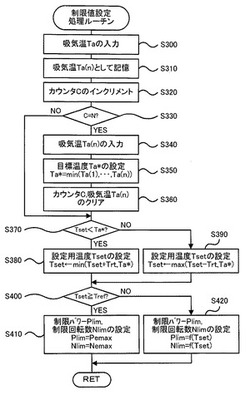
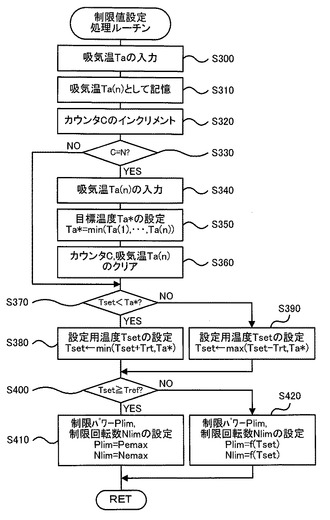
次に、図3を用いて制限パワーPlimと制限回転数Nlimとを設定する制限値設定処理について説明する。制限値設定処理ルーチンが実行されると、エンジンECU24は、まず、温度センサ23からの吸気温Taを入力すると共に(ステップS300)、入力した吸気温Taを図示しないRAMの予め定められた領域のn番目に吸気温Ta(n)として記憶し(ステップS310)、カウントCを値1だけインクリメントし(ステップS320)、カウンタCを数値Nと比較する(ステップS330)。
【0024】
カウンタCが数値Nに一致するときには、それまでに記憶した吸気温Ta(n)の全てを読み込み(ステップS340)、読み込んだ吸気温Ta(n)のうち最も小さい(低い)ものを目標温度Ta*として設定し(ステップS350)、カウンタCを値0に初期化すると共に図示しないRAMに記憶した吸気温Ta(n)をクリアして(ステップS360)、ステップS370に進む。一方、カウンタCが数値Nに一致しないときには、目標温度Ta*の設定やカウンタCおよび吸気温Ta(n)のクリアを行なうことはなく、ステップS370に進む。こうした処理により、カウンタCは、このルーチンが実行される毎に値1ずつインクリメントされ、数値Nに一致する至ったときに値0に初期化されるものであり、N回だけこのルーチンを実行するのに要する時間を計時するものであることが分かる。また、吸気温Ta(n)は、N個に至るまでRAMの予め定められた領域に順に記憶されることになる。なお、カウンタCは、エンジン22が始動されたときに実行される初期化ルーチンにより初期値として値0とされる。
【0025】
ステップS370では、それまで用いていた設定用温度Tsetと設定された目標温度Ta*とを比較し、設定用温度Tsetが目標温度Ta*未満のときには、設定用温度Tsetにレート値Trtを加えたものと目標温度Ta*とのうち小さい方を新たな設定用温度Tsetとして設定し(ステップS380)、設定用温度Tsetが目標温度Ta*以上のときには、設定用温度Tsetからレート値Trtを減じたものと目標温度Ta*とのうち大きい方を新たな設定用温度Tsetとして設定する(ステップS390)。したがって、このルーチンが繰り返し実行される毎に、設定用温度Tsetはレート値Trtずつ目標温度Ta*に近づき、最終的には目標温度Ta*が設定用温度Tsetとして設定されることになる。即ち、設定用温度Tsetは緩変化処理の一種としてのレートリミット処理により目標温度Ta*とされるのである。
【0026】
こうして設定用温度Tsetを設定すると、設定用温度Tsetをエンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要がある温度範囲の上限温度(例えば、−5℃や0℃など)として予め設定された閾値Trefと比較し(ステップS400)、設定用温度Tsetが閾値Tref以上のときには、エンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要がないと判断し、エンジン22の定格値としての最大パワーPemaxを制限パワーPlimとして設定すると共にエンジン22の定格値としての最大回転数Nemaxを制限回転数Nlimとして設定して(ステップS410)、本ルーチンを終了し、設定用温度Tsetが閾値Tref未満のときには、エンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要があると判断し、設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimを設定する図8に例示する制限パワー設定用マップを用いて制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimを設定する図9に例示する制限回転数設定用マップを用いて制限回転数Nlimを設定して(ステップS420)、本ルーチンを終了する。
【0027】
こうして設定された制限パワーPlimは、上述した図2の駆動制御ルーチンのステップS120でエンジン要求パワーPe*を設定する際に用いられ、制限回転数NlimはステップS140でエンジン22の目標回転数Ne*を設定する際に用いられる。図3の制限値設定処理ルーチンでは、設定用温度Tsetが閾値Tref以上のときには、エンジン22の定格値としての最大パワーPemaxが制限パワーPlimとして設定されると共にエンジン22の定格値としての最大回転数Nemaxが制限回転数Nlimとして設定されるから、駆動制御としては、設定用温度Tsetが閾値Tref以上のときには、エンジン22の運転は定格値による制限がなされるだけの通常時の駆動制御となり、設定用温度Tsetが閾値Tref未満のときには、設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimが設定されると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimが設定されるから、駆動制御としては、設定用温度Tsetが閾値Tref未満のときには、エンジン22の運転は設定用温度Tsetに基づいて設定された制限パワーPlimと制限回転数Nlimによる制限がなされる制限時の駆動制御となる。そして、目標温度Ta*は、図3の制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものが設定され、設定用温度Tsetはレートリミット処理により目標温度Ta*にされるから、エンジン22の吸気温Taが閾値Tref未満の状態から吸気温Taが安定して閾値Tref以上の状態に至る際に、エンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値より厳しい制限(設定用温度Tsetに基づく制限パワーPlim,制限回転数Nlim)を課す制御とエンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0028】
以上説明した実施例のハイブリッド自動車20によれば、図3の制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とし、設定用温度Tsetが閾値Tref未満のときには設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimを設定し、この制限パワーPlimと制限回転数Nlimとの制限を受けた運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御し、設定用温度Tsetが閾値Tref以上のときにはエンジン22の定格値としての最大パワーと最大回転数とを制限パワーPlimと制限回転数Nlimとして用いて定格値の制限の運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御することにより、エンジン22の吸気温Taが閾値Tref未満の状態から吸気温Taが安定して閾値Tref以上の状態に至る際に、エンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値より厳しい制限(設定用温度Tsetに基づく制限パワーPlim,制限回転数Nlim)を課す制御とエンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0029】
実施例のハイブリッド自動車20では、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とするものとしたが、レートリミット処理を用いないものとしてもよい。この場合、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを設定用温度Tsetとして設定すればよい。
【0030】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「発電機」に相当し、プラネタリギヤ30が「遊星歯車機構」に相当し、モータMG2が「電動機」に相当し、バッテリ50が「バッテリ」に相当し、温度センサ23が「吸気温検出手段」に相当し、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とする図3の制限値設定処理ルーチンを実行するエンジンECU24が「設定用温度設定手段」に相当し、設定用温度Tsetが閾値Tref未満のときに設定用温度Tsetが低いほど小さくなる傾向にエンジン22の定格値としての最大パワーより小さい制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向にエンジン22の定格値としての最大回転数より小さい制限回転数Nlimを設定する図3の制限値設定処理ルーチンを実行するエンジンECU24が「制限値設定手段」に相当し、制限パワーPlimと制限回転数Nlimの運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御するために図2の駆動制御ルーチンを実行するハイブリッド用電子制御ユニット70とハイブリッド用電子制御ユニット70からの目標回転数Ne*と目標トルクTe*とに基づいてエンジン22を駆動制御するエンジンECU24とハイブリッド用電子制御ユニット70からのトルク指令Tm1*,Tm2*に基づいてモータMG1,MG2を駆動制御するモータECU40とが「制御手段」に相当する。
【0031】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0032】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0033】
本発明は、ハイブリッド自動車の製造産業などに利用可能である。
【符号の説明】
【0034】
20 ハイブリッド自動車、22 エンジン、23 温度センサ、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、50 バッテリ、70 ハイブリッド用電子制御ユニット、82 シフトポジションセンサ、84 アクセルペダルポジションセンサ、86 ブレーキペダルポジションセンサ、88 車速センサ、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、ハイブリッド自動車に関し、詳しくは、内燃機関と、発電機と、発電機の回転軸と内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、発電機および電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車に関する。
【背景技術】
【0002】
従来、この種のハイブリッド自動車としては、エンジンと、モータMG1と、エンジンとモータMG1と車軸とに3つの回転要素が接続された遊星歯車機構と、車軸側にパワーを出力するモータMG2と、二つのモータMG1,MG2と電力のやりとりを行なうバッテリとを備えるハイブリッド自動車において、エンジンの吸気温度が比較的低温度として設定された基準温度未満のときには、モータMG1の許容回転数として通常時用の許容回転数より小さい制御上の許容回転数の範囲内でのモータMG1の目標回転数の設定を伴ってエンジンと二つのモータとを制御するものが提案されている(例えば、特許文献1参照)。このハイブリッド自動車では、上述の制御を行なうことにより、エンジンの吸気温度が低いときに、吸入空気の密度が高くなるためにエンジンから出力されるパワーが過大となることに伴ってモータMG1が過回転するのを抑制している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−203994号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のハイブリッド自動車では、停車中ではエンジンルームに外気の流入が穏やかになるためにエンジンルーム内が暖機されてエンジンの吸気温度が徐々に上昇するが、発進して走行すると外気がエンジンルームに流入して吸気温度が低下するため、エンジンの吸気温度が基準温度以上となったり基準温度未満となったりして、モータの許容回転数が頻繁に通常時用の許容回転数となったりそれより小さい制御上の許容回転数となったりする場合が生じ、エンジンやモータの制御にハンチングを生じさせてしまう。
【0005】
本発明のハイブリッド自動車は、内燃機関と、発電機と、発電機の回転軸と内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、発電機および電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、内燃機関の吸気温が低く内燃機関から過大なパワーが出力されるために内燃機関の運転を制限する制御を行なう場合には、安定して制限する制御から通常の制御に移行させることを主目的とする。
【課題を解決するための手段】
【0006】
本発明のハイブリッド自動車は、上述の主目的を達成するために以下の手段を採った。
【0007】
本発明のハイブリッド自動車は、
内燃機関と、発電機と、前記発電機の回転軸と前記内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、前記発電機および前記電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、
前記内燃機関の吸入空気の温度である吸気温を検出する吸気温検出手段と、
所定時間毎に該所定時間内で前記検出された吸気温の最低値を設定用温度として設定する設定用温度設定手段と、
前記設定された設定用温度が比較的低い温度として予め設定された所定温度未満のときに、前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大回転数より小さな制限回転数を設定する制限値設定手段と、
前記設定された設定用温度が前記所定温度以上のときには前記内燃機関の定格値としての最大パワーを前記制限パワーとして用いると共に前記内燃機関の定格値としての最大回転数を前記制限回転数として用いて前記制限パワー以下且つ前記制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御し、前記設定された設定用温度が前記所定温度未満のときには前記設定された制限パワー以下且つ前記設定された制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御する制御手段と、
を備えることを要旨とする。
【0008】
この本発明のハイブリッド自動車では、所定時間毎に所定時間内で検出される内燃機関の吸入空気の温度である吸気温の最低値として設定される設定用温度が比較的低い温度として予め設定された所定温度以上のときには、内燃機関の定格値としての最大パワーを制限パワーとして用いると共に内燃機関の定格値としての最大回転数を制限回転数として用いて制限パワー以下且つ制限回転数以下の運転領域の範囲内で内燃機関が運転されて走行するよう内燃機関と発電機と電動機とを制御する。一方、設定用温度が所定温度未満のときには、設定用温度が低いほど小さくなる傾向に内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に設定用温度が低いほど小さくなる傾向に内燃機関の定格値としての最大回転数より小さな制限回転数を設定し、この設定した制限パワー以下且つ設定した制限回転数以下の運転領域の範囲内で内燃機関が運転されて走行するよう内燃機関と発電機と電動機とを制御する。この本発明のハイブリッド自動車では、吸気温が所定温度未満の低温のときには、設定用温度が所定温度未満として設定されるから、設定用温度によって設定された制限パワーと制限回転数とに基づく運転領域の範囲内で内燃機関が運転されて走行するよう制御される。そして、気温が上昇して所定時間以上に亘って安定して所定温度以上に至ると、設定用温度は所定温度以上として設定されるから、定格値としての最大パワーと最大回転数とに基づく運転領域の範囲内で内燃機関が運転されて走行するよう制御される。この結果、内燃機関の吸気温が所定温度未満の状態から吸気温が安定して所定温度以上の状態に至る際に、内燃機関から出力するパワーと内燃機関の回転数とに定格値より厳しい制限を課す制御と内燃機関から出力するパワーと内燃機関の回転数とに定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0009】
こうした本発明のハイブリッド自動車において、前記設定用温度設定手段は、前記設定用温度を設定する際にそれまでに設定されていた設定用温度より所定値以上異なる温度を前記設定用温度として設定するときには、緩変化処理を用いて温度が徐々に変化するよう前記設定用温度を設定する手段である、ものとすることもできる。こうすれば、設定用温度の急変を抑止することができ、制限パワーや制限回転数の急変を抑止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。
【図2】エンジン22が運転されているときにハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図3】エンジンECU24により実行される制限値設定処理ルーチンの一例を示すフローチャートである。
【図4】要求トルク設定用マップの一例を示す説明図である。
【図5】エンジン22の動作ラインの一例を示す説明図である。
【図6】エンジン22からパワーを出力している状態で走行しているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図7】トルク制限Tm1min,Tm1maxを設定する様子を説明する説明図である。
【図8】制限パワー設定用マップの一例を示す説明図である。
【図9】制限回転数設定用マップの一例を示す説明図である。
【発明を実施するための形態】
【0011】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0012】
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、ガソリンや軽油などを燃料とするエンジン22と、吸気温Taを検出する温度センサ23などのエンジン22の運転状態を検出するセンサからの検出値に基づいてエンジン22を駆動制御するエンジン用電子制御ユニット(以下、エンジンECUという。)24と、エンジン22のクランクシャフト26にキャリアが接続されると共に駆動輪38a,38bにデファレンシャルギヤ37を介して連結された駆動軸36にリングギヤが接続されたプラネタリギヤ30と、例えば同期発電電動機として構成されて回転子がプラネタリギヤ30のサンギヤに接続されたモータMG1と、例えば同期発電電動機として構成されて回転子が駆動軸36に接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42の図示しないスイッチング素子をスイッチング制御することによってモータMG1,MG2を駆動制御するモータ用電子制御ユニット(以下、モータECUという。)40と、インバータ41,42を介してモータMG1,MG2と電力をやりとりするバッテリ50と、シフトレバーのポジションを検出するシフトポジションセンサ82からのシフトポジションやアクセルペダルの踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度,ブレーキペダルの踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキポジション,車速センサ88からの車速を入力すると共にエンジンECU24やモータECU40と通信して車両全体を制御するハイブリッド用電子制御ユニット70と、を備える。
【0013】
図2はエンジン22が運転されているときにハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートであり、図3は図2の駆動制御ルーチンで用いられる制限パワーPlimと制限回転数Nlimとを設定するためにエンジンECU24により実行される制限値設定処理ルーチンの一例を示すフローチャートである。駆動制御ルーチンや制限値設定処理ルーチンは、所定時間毎(例えば、数msec毎や数十msec毎)に繰り返し実行される。ここで、制限パワーPlimは、エンジン22から出力してもよいパワーの上限値として設定されるものであり、制限回転数Nlimは、エンジン22を回転させてもよい回転数の上限値として設定されるものである。制限パワーPlim,制限回転数Nlimの詳細については後述する。以下に、まず、図2を用いてハイブリッド自動車20の駆動制御を簡単に説明し、その後、図3を用いて制限パワーPlimと制限回転数Nlimとを設定する制限値設定処理について詳述する。
【0014】
図2の駆動制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2の回転数Nm1,Nm2,バッテリ50の入出力制限Win,Wout,制限パワーPlim,制限回転数Nlimなど制御に必要なデータを入力し(ステップS100)、アクセル開度Accと車速Vと図4に例示する要求トルク設定用マップとに基づいて車両に要求されるトルクとして駆動輪38a,38bに連結された駆動軸36に出力すべき要求トルクTr*を設定すると共に設定した要求トルクTr*に駆動軸36の回転数(モータMG2の回転数Nm2)を乗じたものとバッテリ50が要求する充放電要求パワーPb*と損失としてのロスLossとの和として計算される車両要求パワーP*を設定する(ステップS120)。
【0015】
続いて、設定した車両要求パワーP*と制限パワーPlimとのうち小さい方を、即ち、車両要求パワーP*を制限パワーPlimで制限した値をエンジン22から出力すべきエンジン要求パワーPe*として設定すると共に(ステップS130)、このエンジン要求パワーPe*と図5に例示するエンジン22を効率よく動作させる動作ラインとに基づいてエンジン22を運転すべき仮の回転数Netmpと仮のトルクTetmpとを設定する(ステップS140)。そして、仮の回転数Netmpと制限回転数Nlimとのうち小さい方を、即ち、仮の回転数Netmpを制限回転数Nlimで制限した値をエンジン22の目標回転数Ne*として設定すると共に設定した目標回転数Ne*と図5の動作ラインとによってエンジン22の目標トルクTe*を設定する(ステップS140)。
【0016】
次に、エンジン22の目標回転数Ne*とモータMG2の回転数Nm2とプラネタリギヤ30のギヤ比ρとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と入力したモータMG1の回転数Nm1とに基づいて式(2)によりモータMG1から出力すべきトルクの仮の値である仮トルクTm1tmpを計算する(ステップS150)。ここで、式(1)は、プラネタリギヤ30の回転要素に対する力学的な関係式である。エンジン22からパワーを出力している状態で走行しているときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図を図6に示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤの回転数を示し、C軸はエンジン22の回転数Neであるキャリアの回転数を示し、R軸はモータMG2の回転数Nm2である駆動軸36の回転数Ndを示す。式(1)は、この共線図を用いれば容易に導くことができる。なお、R軸上の2つの太線矢印は、モータMG1から出力されたトルクTm1が駆動軸36に作用するトルクと、モータMG2から駆動軸36に出力されるトルクTm2とを示す。また、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0017】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/ρ (1)
Tm1tmp=ρ・Te*/(1+ρ)+k1(Nm1*-Nm1)+k2∫(Nm1*-Nm1)dt (2)
【0018】
続いて、式(3)および式(4)を共に満たすモータMG1から出力してもよいトルクの上下限としてのトルク制限Tm1min,Tm1maxを設定し(ステップS160)、設定した仮トルクTm1tmpを式(5)によりトルク制限Tm1min,Tm1maxで制限してモータMG1のトルク指令Tm1*を設定する(ステップ170)。ここで、式(3)はモータMG1やモータMG2により駆動軸36に出力されるトルクの総和が値0から要求トルクTr*までの範囲内となる関係であり、式(4)はモータMG1とモータMG2とにより入出力される電力の総和が入出力制限Win,Woutの範囲内となる関係である。トルク制限Tm1min,Tm1maxの一例を図7に示す。トルク制限Tm1min,Tm1maxは、図中斜線で示した領域内のトルク指令Tm1*の最大値と最小値として求めることができる。
【0019】
0≦−Tm1/ρ+Tm2≦Tr* (3)
Win≦Tm1・Nm1+Tm2・Nm2≦Wout (4)
Tm1*=max(min(Tm1tmp,Tm1max),Tm1min) (5)
【0020】
そして、要求トルクTr*に設定したトルク指令Tm1*をプラネタリギヤ30のギヤ比ρで除したものを加えてモータMG2から出力すべきトルクの仮の値である仮トルクTm2tmpを次式(6)により計算すると共に(ステップS180)、バッテリ50の入出力制限Win,Woutと設定したトルク指令Tm1*に現在のモータMG1の回転数Nm1を乗じて得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で割ることによりモータMG2から出力してもよいトルクの上下限としてのトルク制限Tm2min,Tm2maxを次式(7)および式(8)により計算すると共に(ステップS190)、設定した仮トルクTm2tmpを式(9)によりトルク制限Tm2min,Tm2maxで制限してモータMG2のトルク指令Tm2*を設定する(ステップS200)。ここで、式(6)は、図6の共線図から容易に導くことができる。
【0021】
Tm2tmp=Tr*+Tm1*/ρ (6)
Tm2min=(Win-Tm1*・Nm1)/Nm2 (7)
Tm2max=(Wout-Tm1*・Nm1)/Nm2 (8)
Tm2*=max(min(Tm2tmp,Tm2max),Tm2min) (9)
【0022】
こうしてエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信し(ステップS210)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における吸入空気量制御や燃料噴射制御,点火制御などの制御を行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。こうした制御により、エンジン22を制限パワーPlim以下で且つ制限回転数Nlim以下の運転領域内でエンジン22を効率よく運転しながらバッテリ50の入出力制限Win,Woutの範囲内で駆動軸36に要求トルクTr*を出力して走行することができる。
【0023】
次に、図3を用いて制限パワーPlimと制限回転数Nlimとを設定する制限値設定処理について説明する。制限値設定処理ルーチンが実行されると、エンジンECU24は、まず、温度センサ23からの吸気温Taを入力すると共に(ステップS300)、入力した吸気温Taを図示しないRAMの予め定められた領域のn番目に吸気温Ta(n)として記憶し(ステップS310)、カウントCを値1だけインクリメントし(ステップS320)、カウンタCを数値Nと比較する(ステップS330)。
【0024】
カウンタCが数値Nに一致するときには、それまでに記憶した吸気温Ta(n)の全てを読み込み(ステップS340)、読み込んだ吸気温Ta(n)のうち最も小さい(低い)ものを目標温度Ta*として設定し(ステップS350)、カウンタCを値0に初期化すると共に図示しないRAMに記憶した吸気温Ta(n)をクリアして(ステップS360)、ステップS370に進む。一方、カウンタCが数値Nに一致しないときには、目標温度Ta*の設定やカウンタCおよび吸気温Ta(n)のクリアを行なうことはなく、ステップS370に進む。こうした処理により、カウンタCは、このルーチンが実行される毎に値1ずつインクリメントされ、数値Nに一致する至ったときに値0に初期化されるものであり、N回だけこのルーチンを実行するのに要する時間を計時するものであることが分かる。また、吸気温Ta(n)は、N個に至るまでRAMの予め定められた領域に順に記憶されることになる。なお、カウンタCは、エンジン22が始動されたときに実行される初期化ルーチンにより初期値として値0とされる。
【0025】
ステップS370では、それまで用いていた設定用温度Tsetと設定された目標温度Ta*とを比較し、設定用温度Tsetが目標温度Ta*未満のときには、設定用温度Tsetにレート値Trtを加えたものと目標温度Ta*とのうち小さい方を新たな設定用温度Tsetとして設定し(ステップS380)、設定用温度Tsetが目標温度Ta*以上のときには、設定用温度Tsetからレート値Trtを減じたものと目標温度Ta*とのうち大きい方を新たな設定用温度Tsetとして設定する(ステップS390)。したがって、このルーチンが繰り返し実行される毎に、設定用温度Tsetはレート値Trtずつ目標温度Ta*に近づき、最終的には目標温度Ta*が設定用温度Tsetとして設定されることになる。即ち、設定用温度Tsetは緩変化処理の一種としてのレートリミット処理により目標温度Ta*とされるのである。
【0026】
こうして設定用温度Tsetを設定すると、設定用温度Tsetをエンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要がある温度範囲の上限温度(例えば、−5℃や0℃など)として予め設定された閾値Trefと比較し(ステップS400)、設定用温度Tsetが閾値Tref以上のときには、エンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要がないと判断し、エンジン22の定格値としての最大パワーPemaxを制限パワーPlimとして設定すると共にエンジン22の定格値としての最大回転数Nemaxを制限回転数Nlimとして設定して(ステップS410)、本ルーチンを終了し、設定用温度Tsetが閾値Tref未満のときには、エンジン22から出力してもよいパワーやエンジン22の回転数Neを制限する必要があると判断し、設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimを設定する図8に例示する制限パワー設定用マップを用いて制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimを設定する図9に例示する制限回転数設定用マップを用いて制限回転数Nlimを設定して(ステップS420)、本ルーチンを終了する。
【0027】
こうして設定された制限パワーPlimは、上述した図2の駆動制御ルーチンのステップS120でエンジン要求パワーPe*を設定する際に用いられ、制限回転数NlimはステップS140でエンジン22の目標回転数Ne*を設定する際に用いられる。図3の制限値設定処理ルーチンでは、設定用温度Tsetが閾値Tref以上のときには、エンジン22の定格値としての最大パワーPemaxが制限パワーPlimとして設定されると共にエンジン22の定格値としての最大回転数Nemaxが制限回転数Nlimとして設定されるから、駆動制御としては、設定用温度Tsetが閾値Tref以上のときには、エンジン22の運転は定格値による制限がなされるだけの通常時の駆動制御となり、設定用温度Tsetが閾値Tref未満のときには、設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimが設定されると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimが設定されるから、駆動制御としては、設定用温度Tsetが閾値Tref未満のときには、エンジン22の運転は設定用温度Tsetに基づいて設定された制限パワーPlimと制限回転数Nlimによる制限がなされる制限時の駆動制御となる。そして、目標温度Ta*は、図3の制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものが設定され、設定用温度Tsetはレートリミット処理により目標温度Ta*にされるから、エンジン22の吸気温Taが閾値Tref未満の状態から吸気温Taが安定して閾値Tref以上の状態に至る際に、エンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値より厳しい制限(設定用温度Tsetに基づく制限パワーPlim,制限回転数Nlim)を課す制御とエンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0028】
以上説明した実施例のハイブリッド自動車20によれば、図3の制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とし、設定用温度Tsetが閾値Tref未満のときには設定用温度Tsetが低いほど小さくなる傾向に制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向に制限回転数Nlimを設定し、この制限パワーPlimと制限回転数Nlimとの制限を受けた運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御し、設定用温度Tsetが閾値Tref以上のときにはエンジン22の定格値としての最大パワーと最大回転数とを制限パワーPlimと制限回転数Nlimとして用いて定格値の制限の運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御することにより、エンジン22の吸気温Taが閾値Tref未満の状態から吸気温Taが安定して閾値Tref以上の状態に至る際に、エンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値より厳しい制限(設定用温度Tsetに基づく制限パワーPlim,制限回転数Nlim)を課す制御とエンジン22から出力するパワーとエンジン22の回転数Neとに対して定格値による制限を課す制御とがハンチングするのを抑制することができ、安定して制御を移行させることができる。
【0029】
実施例のハイブリッド自動車20では、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とするものとしたが、レートリミット処理を用いないものとしてもよい。この場合、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを設定用温度Tsetとして設定すればよい。
【0030】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「発電機」に相当し、プラネタリギヤ30が「遊星歯車機構」に相当し、モータMG2が「電動機」に相当し、バッテリ50が「バッテリ」に相当し、温度センサ23が「吸気温検出手段」に相当し、制限値設定処理ルーチンがN回実行される時間毎にその間に記憶されたN個の吸気温Ta(n)のうち最も小さいものを目標温度Ta*として設定すると共に設定用温度Tsetをレートリミット処理によって目標温度Ta*とする図3の制限値設定処理ルーチンを実行するエンジンECU24が「設定用温度設定手段」に相当し、設定用温度Tsetが閾値Tref未満のときに設定用温度Tsetが低いほど小さくなる傾向にエンジン22の定格値としての最大パワーより小さい制限パワーPlimを設定すると共に設定用温度Tsetが低くなるほど小さくなる傾向にエンジン22の定格値としての最大回転数より小さい制限回転数Nlimを設定する図3の制限値設定処理ルーチンを実行するエンジンECU24が「制限値設定手段」に相当し、制限パワーPlimと制限回転数Nlimの運転領域内でエンジン22を運転しながら走行するようエンジン22とモータMG1,MG2を制御するために図2の駆動制御ルーチンを実行するハイブリッド用電子制御ユニット70とハイブリッド用電子制御ユニット70からの目標回転数Ne*と目標トルクTe*とに基づいてエンジン22を駆動制御するエンジンECU24とハイブリッド用電子制御ユニット70からのトルク指令Tm1*,Tm2*に基づいてモータMG1,MG2を駆動制御するモータECU40とが「制御手段」に相当する。
【0031】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0032】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0033】
本発明は、ハイブリッド自動車の製造産業などに利用可能である。
【符号の説明】
【0034】
20 ハイブリッド自動車、22 エンジン、23 温度センサ、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、36 駆動軸、37 デファレンシャルギヤ、38a,38b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、50 バッテリ、70 ハイブリッド用電子制御ユニット、82 シフトポジションセンサ、84 アクセルペダルポジションセンサ、86 ブレーキペダルポジションセンサ、88 車速センサ、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
内燃機関と、発電機と、前記発電機の回転軸と前記内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、前記発電機および前記電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、
前記内燃機関の吸入空気の温度である吸気温を検出する吸気温検出手段と、
所定時間毎に該所定時間内で前記検出された吸気温の最低値を設定用温度として設定する設定用温度設定手段と、
前記設定された設定用温度が比較的低い温度として予め設定された所定温度未満のときに、前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大回転数より小さな制限回転数を設定する制限値設定手段と、
前記設定された設定用温度が前記所定温度以上のときには前記内燃機関の定格値としての最大パワーを前記制限パワーとして用いると共に前記内燃機関の定格値としての最大回転数を前記制限回転数として用いて前記制限パワー以下且つ前記制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御し、前記設定された設定用温度が前記所定温度未満のときには前記設定された制限パワー以下且つ前記設定された制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項2】
請求項1記載のハイブリッド自動車であって、
前記設定用温度設定手段は、前記設定用温度を設定する際にそれまでに設定されていた設定用温度より所定値以上異なる温度を前記設定用温度として設定するときには、緩変化処理を用いて温度が徐々に変化するよう前記設定用温度を設定する手段である、
ハイブリッド自動車。
【請求項1】
内燃機関と、発電機と、前記発電機の回転軸と前記内燃機関の出力軸と車軸の3軸に3つの回転要素が接続された遊星歯車機構と、車軸に動力を出力する電動機と、前記発電機および前記電動機と電力のやりとりを行なうバッテリと、を備えるハイブリッド自動車において、
前記内燃機関の吸入空気の温度である吸気温を検出する吸気温検出手段と、
所定時間毎に該所定時間内で前記検出された吸気温の最低値を設定用温度として設定する設定用温度設定手段と、
前記設定された設定用温度が比較的低い温度として予め設定された所定温度未満のときに、前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大パワーより小さな制限パワーを設定すると共に前記設定された設定用温度が低いほど小さくなる傾向に前記内燃機関の定格値としての最大回転数より小さな制限回転数を設定する制限値設定手段と、
前記設定された設定用温度が前記所定温度以上のときには前記内燃機関の定格値としての最大パワーを前記制限パワーとして用いると共に前記内燃機関の定格値としての最大回転数を前記制限回転数として用いて前記制限パワー以下且つ前記制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御し、前記設定された設定用温度が前記所定温度未満のときには前記設定された制限パワー以下且つ前記設定された制限回転数以下の運転領域の範囲内で前記内燃機関が運転されて走行するよう前記内燃機関と前記発電機と前記電動機とを制御する制御手段と、
を備えるハイブリッド自動車。
【請求項2】
請求項1記載のハイブリッド自動車であって、
前記設定用温度設定手段は、前記設定用温度を設定する際にそれまでに設定されていた設定用温度より所定値以上異なる温度を前記設定用温度として設定するときには、緩変化処理を用いて温度が徐々に変化するよう前記設定用温度を設定する手段である、
ハイブリッド自動車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−162154(P2012−162154A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−23328(P2011−23328)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]