
ハイブリッド車の制御装置
【課題】異音による運転者への不快感を抑制しつつハイブリッド車の燃費の向上を図る。
【解決手段】車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインL1〜L4,LS1〜LS12からシフトポジションSPとブレーキペダルポジションBPとに基づいて動作ラインLを設定し、設定した動作ラインLを用いてエンジンの目標運転ポイントを設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し、エンジンとモータMG1,MG2を制御する。これにより、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【解決手段】車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインL1〜L4,LS1〜LS12からシフトポジションSPとブレーキペダルポジションBPとに基づいて動作ラインLを設定し、設定した動作ラインLを用いてエンジンの目標運転ポイントを設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し、エンジンとモータMG1,MG2を制御する。これにより、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車の制御装置に関し、詳しくは、内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置に関する。
【背景技術】
【0002】
従来、この種のハイブリッド車の制御装置としては、エンジンと、モータジェネレータと、車軸とエンジンの出力軸とモータジェネレータの回転軸とに接続された動力分割機構とを備えるハイブリッド車の制御装置において、ガラ音を回避するためのエンジン動作点におけるエンジン回転数を排気再循環(EGR)の割合(EGR率)が大きいほど高く設定するものが提案されている(例えば、特許文献1参照)。この装置では、EGR率が大きいほどエンジン動作点におけるエンジン回転数を高く設定することにより、ガラ音の発生を適切に抑制している。
【0003】
また、同様の構成のハイブリッド車の制御装置において、車速が大きいほどエンジンの低回転領域におけるトルクが大きくなるよう動作ラインを設定してエンジンを運転制御するものも提案されている(例えば、特許文献2参照)。この装置では、車速が大きいほど走行による騒音が大きくなり、エンジンを低回転高トルクの領域で運転することにより生じ得る異音をマスクすることにより、異音による違和感を運転者に与えるのを抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−179856号公報
【特許文献2】特開2007−022296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
こもり音やガラ音などの異音は、起振源であるエンジントルクの変動が変速機などの機械的機構に伝達することによって生じる機械的機構の歯打ちに起因しており、この歯打ち音が機械的機構やブレーキ,パーキングブレーキなどによってボディに伝達し、運転者に異音として到達すると考えられる。このため、機械的機構やブレーキ,パーキングブレーキの状態により異音の運転者への到達の程度が変化する。したがって、こうした機械的機構やブレーキ,パーキングブレーキの状態に応じて異音の運転者への到達の程度を考慮してエンジンを運転することにより、異音による運転者への不快感を抑制しつつハイブリッド車の燃費を向上させることができる。
【0006】
本発明のハイブリッド車の制御装置は、異音による運転者への不快感を抑制しつつハイブリッド車の燃費の向上を図ることを主目的とする。
【課題を解決するための手段】
【0007】
本発明のハイブリッド車の制御装置は、上述の主目的を達成するために以下の手段を採った。
【0008】
本発明のハイブリッド車の制御装置は、
内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置であって、
前記内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を該燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて前記内燃機関を運転すると共に走行に要求される駆動力によって走行するよう前記内燃機関と前記発電機と前記電動機とを制御する、
ことを特徴とする。
【0009】
本発明のハイブリッド車の制御装置では、内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて内燃機関を運転する。これは、車両の走行を規制する程度が大きいほど、異音の運転者への到達の程度が小さくなると考えられることに基づく。したがって、上述の制御により、異音による運転者への不快感を抑制しつつハイブリッド車の燃費をより向上させることができる。ここで、「車両の走行を規制する程度」は、車両の走行の妨げの程度の意味やより高車速で走行するのに適していない程度の意味が含まれる。例えば、パーキングブレーキによるパーキングロックや運転者のブレーキ操作によるブレーキは車両の走行を妨げるものとなり、シーケンシャルシフト(仮想シフト)を有するものでは、低車速側のシフト位置ほど高車速で走行するのに適していないものとなる。
【0010】
こうした本発明のハイブリッド車の制御装置において、パーキングロックがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御するものとすることもできるし、ブレーキがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御するものとすることもできる。パーキングロックがオンのときにはオフのときに比して車両の走行を規制する程度、即ち車両の走行を妨げる程度が大きくなり、ブレーキがオンのときにはオフのときに比して車両の走行を規制する程度が大きくなるからである。
【0011】
また、本発明のハイブリッド車の制御装置において、シフトポジションが低車速側のポジションほど高車速側のポジションに比して前記異音発生領域の回避の程度が小さくなる動作ラインを用いて制御するものとすることもできる。シフトポジションが低車速側のポジションほど高車速側のポジションに比して車両の走行を規制する程度、高車速で走行するのに適していない程度が大きくなると考えられるからである。
【図面の簡単な説明】
【0012】
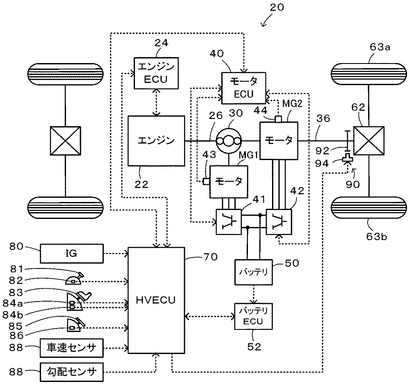
【図1】本発明の第1実施例の車両の制御装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。
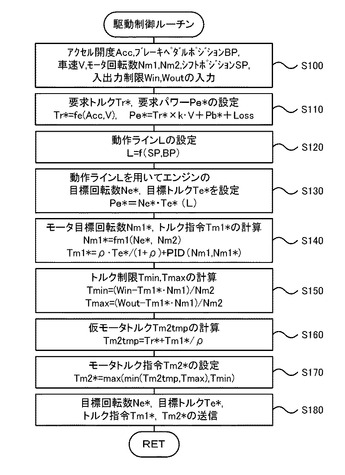
【図2】第1実施例のHVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
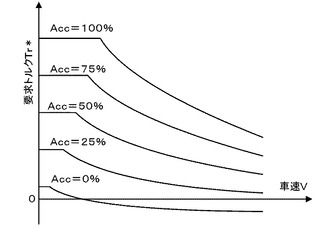
【図3】要求トルク設定用マップの一例を示す説明図である。
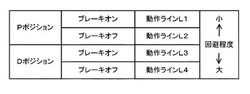
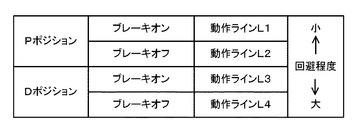
【図4】シフトポジションSPとブレーキペダルポジションBPと動作ラインLとの関係の一例を示す説明図である。
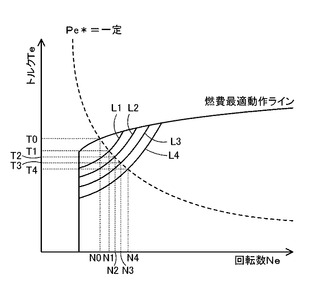
【図5】燃費最適動作ラインと動作ラインL1〜L4とエンジン22の運転ポイントとの関係の一例を示す説明図である。
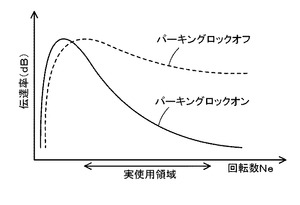
【図6】パーキングロック機構90によるパーキングロックのオンオフの状態とエンジン22の回転数Neとこもり音やガラ音などの異音が車両ボディなどにより運転者に伝達される伝達率との関係の一例を示す説明図である。
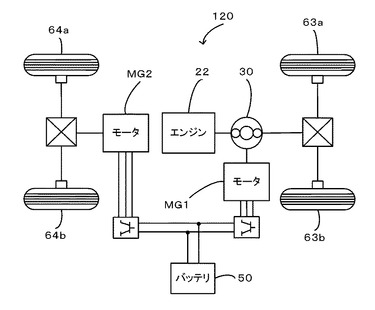
【図7】変形例のハイブリッド自動車120の構成の概略を示す構成図である。
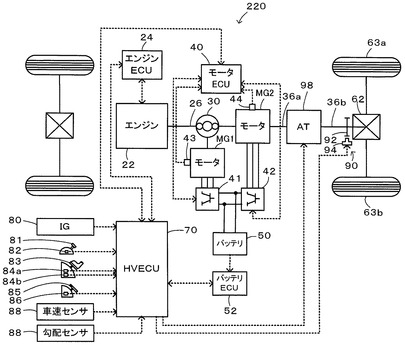
【図8】第2実施例の車両の制御装置を搭載するハイブリッド自動車220の構成の概略を示す構成図である。
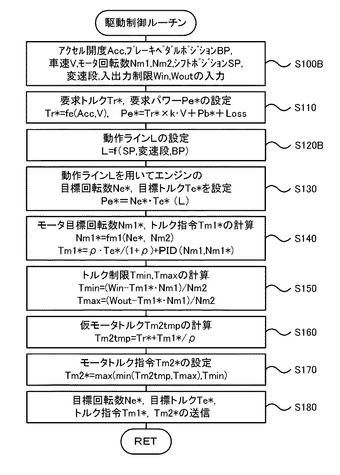
【図9】第2実施例のHVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
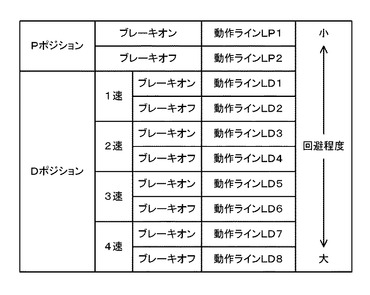
【図10】シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPと動作ラインLとの関係の一例を示す説明図である。
【発明を実施するための形態】
【0013】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例1】
【0014】
図1は、本発明の第1実施例のの車両の制御装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。第1実施例のハイブリッド自動車20は、図示するように、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関として構成されたエンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して複数のピニオンギヤを連結したキャリアが接続されると共に駆動輪63a,63bにデファレンシャルギヤ62を介して連結された駆動軸36にリングギヤが接続された遊星歯車機構として構成された3軸式の動力分配統合機構30と、例えば周知の同期発電電動機として構成されて動力分配統合機構30のサンギヤにロータが接続されたモータMG1と、例えば周知の同期発電電動機として構成されて駆動軸36にロータが接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、例えばリチウムイオン二次電池として構成されてインバータ41,42を介してモータMG1,MG2と電力のやりとりを行なうバッテリ50と、駆動軸36に取り付けられたパーキングロック機構90と、車両全体をコントロールするハイブリッド用電子制御ユニット(以下、HVECUという)70と、を備える。
【0015】
エンジン22は、エンジン用電子制御ユニット(以下、エンジンECUという)24により吸入空気量調節制御や燃料噴射制御,点火制御などの運転制御を受けている。エンジンECU24には、エンジン22の運転状態を検出する各種センサからの信号、例えば、エンジン22のクランクシャフト26のクランク角を検出する図示しないクランクポジションセンサからのクランクポジションなどが入力されている。また、エンジンECU24からは、エンジン22を運転制御するための種々の制御信号、例えば、スロットルバルブや燃料噴射弁,点火プラグ,可変バルブタイミング機構への駆動制御信号などが出力されている。エンジンECU24は、HVECU70と通信しており、HVECU70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをHVECU70に出力する。なお、エンジンECU24は、図示しないクランクポジションセンサからのクランクポジションに基づいてクランクシャフト26の回転数、即ちエンジン22の回転数Neも演算している。
【0016】
モータMG1,MG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2のロータの回転位置を検出する回転位置検出センサ43,44からの信号や図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流などが入力されており、モータECU40からは、インバータ41,42へのスイッチング制御信号が出力されている。モータECU40は、HVECU70と通信しており、HVECU70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをHVECU70に出力する。なお、モータECU40は、回転位置検出センサ43,44からの信号に基づいてモータMG1,MG2の回転数Nm1,Nm2も演算している。
【0017】
バッテリ50は、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧やバッテリ50の正極側の出力端子に取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた温度センサ51からの電池温度Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりHVECU70に出力する。また、バッテリECU52は、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいてバッテリ50に蓄えられている蓄電量の全容量(蓄電容量)に対する割合である蓄電割合SOCを演算したり、演算した蓄電割合SOCと電池温度Tbとに基づいてバッテリ50を充放電してもよい最大許容電力である入出力制限Win,Woutを演算したりしている。なお、バッテリ50の入出力制限Win,Woutは、電池温度Tbに基づいて入出力制限Win,Woutの基本値を設定し、バッテリ50の蓄電割合SOCに基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定することができる。
【0018】
パーキングロック機構90は、駆動軸36に取り付けられたパーキングギヤ92と、パーキングギヤ92と噛み合ってその回転駆動を停止した状態でロックするパーキングロックポール94と、を備える。パーキングロックポール94は、他のポジションから駐車ポジション(Pポジション)への操作信号または駐車ポジションから他のポジションへの操作信号を入力したHVECU70によって図示しないアクチュエータが駆動制御されることによって作動し、パーキングギヤ92との噛合およびその解除によってパーキングロックおよびその解除を行なう。
【0019】
HVECU70は、図示しないCPUを中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROMや、データを一時的に記憶するRAM、入出力ポートおよび通信ポートを備える。HVECU70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速Vなどが入力ポートを介して入力されている。HVECU70からは、パーキングロック機構90の図示しないアクチュエータへの駆動制御信号などが出力ポートを介して出力されている。HVECU70は、前述したように、エンジンECU24やモータECU40,バッテリECU52と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52と各種制御信号やデータのやりとりを行なっている。
【0020】
また、第1実施例のハイブリッド自動車20では、シフトレバー81のシフトポジションSPとして、駐車時に用いる駐車ポジション(Pポジション)、後進走行用のリバースポジション(Rポジション)、中立のニュートラルポジション(Nポジション)、前進走行用の通常のドライブポジション(Dポジション)の他に、アクセルオン時の駆動力の設定等はDポジションと同一であるが走行中のアクセルオフ時に作用させる制動力がDポジションより大きく設定されるブレーキポジション(Bポジション)、なお、第1実施例では、Bポジションでは、走行中にアクセルオフされたときには、燃料噴射を停止した状態でエンジン22をモータMG1によってモータリングすることによりエンジン22を強制的に回転させその回転抵抗を制動力として駆動軸36に作用させるブレーキ制御と、モータMG2を回生制御することによって制動力を駆動軸36に作用させるブレーキ制御とを併用している。
【0021】
ここで、第1実施例の車両の制御装置としては、HVECU70とエンジンECU24とモータECU40とバッテリECU52が該当する。
【0022】
こうして構成された第1実施例のハイブリッド自動車20では、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力が駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや、要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード,エンジン22の運転を停止してモータMG2からの要求動力に見合う動力を駆動軸36に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードおよび充放電運転モードは、いずれもエンジン22の運転を伴って要求動力が駆動軸36に出力されるようエンジン22とモータMG1,MG2とを制御するモードであるから、両者を合わせてエンジン運転モードとして考えることができる。
【0023】
第1実施例のハイブリッド自動車20では、エンジン運転モードで運転しているときに、エンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を運転停止した方がよいとして定められた閾値Pstop以下に至ると、エンジン22の運転を停止してモータ運転モードに移行する。そして、モータ運転モードで運転しているときに、要求トルクTr*に駆動軸36の回転数Nrを乗じて得られる走行用パワーPdrv*からバッテリ50の充放電要求パワーPb*を減じて得られるエンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を始動した方がよいとして定められた閾値Pstart以上に至ると、エンジン22を始動してエンジン運転モードに移行する。また、第1実施例のハイブリッド自動車20では、シフトポジションSPが駐車ポジション(Pポジション)のときには、エンジン22が運転停止中でバッテリ50の蓄電割合SOCが充電開始用の蓄電割合SOCとしての閾値Slo(例えば、35%や40%など)以下のときにエンジン22を始動し、バッテリ50の蓄電割合SOCが充電終了の蓄電割合SOCとしての閾値Shi(例えば、60%や65%など)以上に至るまでエンジン22からの動力を用いてモータMG1によって発電を行なってバッテリ50を充電する。このとき、動力分配統合機構30を介して駆動軸36にトルクが作用するため、パーキングロック機構90によって駆動軸36がロックされていないときには、このトルクをキャンセルするキャンセルトルクと図示しないギヤ機構などのガタ詰めを行なうためのガタ詰めトルクとの和のトルクをモータMG2から出力する。パーキングロック機構90によって駆動軸36がロックされているときには、モータMG2からのトルク出力は行なわれない。
【0024】
次に、こうして構成された第1実施例のハイブリッド自動車20の動作、特に、エンジン22を比較的低回転数高トルクで運転しているときの動作について説明する。図2は、HVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0025】
駆動制御ルーチンが実行されると、HVECU70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,ブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,シフトポジションセンサ82からのシフトポジションSP,モータMG1,MG2の回転数Nm1,Nm2,バッテリ50の入出力制限Win,Woutなど制御に必要なデータを入力する処理を実行する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、回転位置検出センサ43,44により検出されるモータMG1,MG2の回転子の回転位置に基づいて計算されたものをモータECU40から通信により入力するものとした。また、バッテリ50の入出力制限Win,Woutは、温度センサ51により検出されたバッテリ50の電池温度Tbとバッテリ50の残容量(SOC)とに基づいて設定されたものをバッテリECU52から通信により入力するものとした。
【0026】
こうしてデータを入力すると、入力したアクセル開度Accと車速Vとに基づいて車両に要求されるトルクとして駆動輪63a,63bに連結された駆動軸36に出力すべき要求トルクTr*とエンジン22に要求される要求パワーPe*とを設定する(ステップS110)。要求トルクTr*は、第1実施例では、アクセル開度Accと車速Vと要求トルクTr*との関係を予め定めて要求トルク設定用マップとしてHVECU70の図示しないROMに記憶しておき、アクセル開度Accと車速Vとが与えられると記憶したマップから対応する要求トルクTr*を導出して設定するものとした。図3に要求トルク設定用マップの一例を示す。要求パワーPe*は、設定した要求トルクTr*に駆動軸36の回転数Nrを乗じたものとバッテリ50が要求する充放電要求パワーPb*とロスLossとの和として計算することができる。なお、駆動軸36の回転数Nrは、車速Vに換算係数kを乗じることによって求めたり、モータMG2の回転数Nm2として求めることができる。
【0027】
続いて、入力したシフトポジションSPとブレーキペダルポジションBPとに基づいてエンジン22の目標運転ポイント(目標回転数Ne*および目標トルクTe*)を設定するための動作ラインLを設定し(ステップS120)、設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定する(ステップS130)。図4にシフトポジションSPとブレーキペダルポジションBPと動作ラインLとの関係の一例を示し、図5に燃費最適動作ラインと動作ラインL1〜L4とエンジン22の運転ポイント(回転数,トルク)との関係の一例を示す。図5の燃費最適動作ラインは、エンジン22の燃費が最適となる動作ラインとして予め定められたものであり、エンジン22の特性に基づいて実験などにより求めることができる。動作ラインL1〜L4は、比較的低回転高トルクの領域(こもり音やガラ音などの異音が生じる異音発生領域)におけるラインが燃費最適動作ラインと異なるものであり、L1,L2,L3,L4の順に異音発生領域を燃費最適動作ラインから段階的に回避する。図4の最右欄に示されている「回避程度」は、この異音発生領域を燃費最適動作ラインから回避する程度を示しており、シフトポジションSPがPポジションとDポジションではPポジションの方が回避の程度が小さく、ブレーキオンとブレーキオフではブレーキオンの方が回避の程度が小さくなる。図6にパーキングロック機構90によるパーキングロックのオンオフの状態とエンジン22の回転数Neとこもり音やガラ音などの異音が車両ボディなどにより運転者に伝達される伝達率(dB)との関係の一例を示す。図示するように、エンジン22の実使用領域では、パーキングロックがオンのときの方がオフのときに比して伝達率が小さいため、パーキングロックがオンのときの方がオフのときに比してこもり音やガラ音などの異音は運転者に伝達され難いものとなる。このため、パーキングロックがオンのときの方がオフのときに比して異音発生領域の燃費最適動作ラインからの回避の程度を小さくしてもよいことになる。図示しないが、運転者によってブレーキペダル85が踏み込まれているか否か(即ちブレーキのオンオフ)によるこもり音やガラ音などの異音の運転者への伝達率も、程度の差はあるが、パーキングロックのオンオフによる伝達率と同様の関係となる。図4のPポジションとDポジションにおける「回避程度」の大小関係は、このパーキングロックがオンかオフか、ブレーキがオンかオフかによるものとなる。これらの関係は、車両の走行を規制する程度、即ち、車両の走行を妨げる程度と考えることができる。即ち、パーキングロックのオンオフは車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、ブレーキのオンオフも車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高くる。したがって、車両の走行を規制する程度が大きいほど異音発生領域を燃費最適動作ラインから回避する程度は小さくなるものということができる。第1実施例では、こうした動作ライン(燃費最適動作ライン、動作ラインL1〜L4)は、予め実験などにより定めてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとブレーキペダルポジションBPが与えられると対応する動作ラインを導出することにより動作ラインLを設定するものとした。エンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)は、図5に示すように、要求パワーPe*が一定の曲線(図5の破線)と動作ラインLとの交点のトルクと回転数として求めることができる。例えば、動作ラインLとして燃費最適動作ラインが設定されたときには要求パワーPe*と燃費最適動作ラインとの交点の回転数N0とトルクT0が目標回転数Ne*と目標トルクTe*として設定される。動作ラインLとして、動作ラインL1(Pポジションでブレーキがオン),動作ラインL2(Pポジションでブレーキがオフ),動作ラインL3(Dポジションでブレーキがオン),動作ラインL4(Dポジションでブレーキがオン)のいずれかが設定されたときには要求パワーPe*と設定された動作ラインLとの交点の回転数(N1〜N4のうち対応する値)とトルク(T1〜T4の対応する値)が目標回転数Ne*と目標トルクTe*として設定される。
【0028】
次に、設定した目標回転数Ne*と駆動軸36の回転数Nr(Nm2/Gr)と動力分配統合機構30のギヤ比ρとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と現在の回転数Nm1とに基づいて式(2)によりモータMG1のトルク指令Tm1*を計算する(ステップS140)。ここで、式(1)は、動力分配統合機構30の回転要素に対する力学的な関係式である。また、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0029】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/ρ (1)
Tm1*=ρ・Te*/(1+ρ)+k1(Nm1*-Nm1)+k2∫(Nm1*-Nm1)dt (2)
【0030】
こうしてモータMG1の目標回転数Nm1*とトルク指令Tm1*とを計算すると、バッテリ50の入出力制限Win,Woutと計算したモータMG1のトルク指令Tm1*に現在のモータMG1の回転数Nm1を乗じて得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で割ることによりモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(3)および式(4)により計算すると共に(ステップS150)、要求トルクTr*とトルク指令Tm1*と動力分配統合機構30のギヤ比ρを用いてモータMG2から出力すべきトルクとしての仮モータトルクTm2tmpを式(5)により計算し(ステップS160)、計算したトルク制限Tmin,Tmaxで仮モータトルクTm2tmpを制限した値としてモータMG2のトルク指令Tm2*を設定する(ステップS170)。このようにモータMG2のトルク指令Tm2*を設定することにより、駆動軸36に出力する要求トルクTr*を、バッテリ50の入出力制限Win,Woutの範囲内で制限したトルクとして設定することができる。
【0031】
Tmin=(Win-Tm1*・Nm1)/Nm2 (3)
Tmax=(Wout-Tm1*・Nm1)/Nm2 (4)
Tm2tmp=Tr*+Tm1*/ρ (5)
【0032】
こうしてエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS180)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における燃料噴射制御や点火制御などの制御を行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0033】
以上説明した第1実施例の車両の制御装置を搭載するハイブリッド自動車20によれば、車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインL1〜L4を燃費最適動作ラインと共にシフトポジションSPとブレーキペダルポジションBPとに関連させてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとブレーキペダルポジションBPとに基づいて対応する動作ラインを動作ラインLとして設定し、この設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定し、目標運転ポイントでエンジン22が運転されると共に要求トルクTr*が駆動軸36に出力されるようエンジン22とモータMG1,MG2を制御することにより、車両の走行を規制する程度に応じて異音発生領域の燃費最適動作ラインから回避する程度を選択してエンジン22を運転することができる。この結果、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【0034】
第1実施例のハイブリッド自動車20では、ブレーキのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮するものとしたが、ブレーキのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮しないものとしてもよい。この場合、動作ラインLの設定では、例えば、図4においてシフトポジションSPに対応するポジションのブレーキオフの動作ラインを用いればよい。この場合、動作ラインLの設定では、シフトポジションSPがPポジションのときには動作ラインL2を設定し、シフトポジションSPがDポジションのときには動作ラインL4を設定するものとすればよい。
【0035】
第1実施例のハイブリッド自動車20では、パーキングロックのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮するものとしたが、パーキングロックのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮しないものとしてもよい。この場合、動作ラインLの設定では、例えば、図4においてシフトポジションSPがDポジションのときのものを用いればよい。即ち、ブレーキがオンのときには動作ラインL3を設定し、ブレーキがオフのときには動作ラインL4を設定するものとすればよい。
【0036】
第1実施例のハイブリッド自動車20では、モータMG2の動力を駆動軸36に出力するものとしたが、図7の変形例のハイブリッド自動車120に例示するように、モータMG2の動力を駆動軸36が接続された車軸(駆動輪63a,63bが接続された車軸)とは異なる車軸(図7における車輪64a,64bに接続された車軸)に接続するものとしてもよい。
【実施例2】
【0037】
次に、本発明の第2実施例の車両の制御装置を搭載するハイブリッド自動車220について説明する。図8は、第2実施例のハイブリッド自動車220の構成の概略を示す構成図である。第2実施例のハイブリッド自動車220のハード構成は、図示するように、駆動軸36のモータMG2が取り付けられた位置より後段にオートマチックトランスミッション98が取り付けられている点を除いて、図1に示す第1実施例のハイブリッド自動車20のハード構成と同様である。したがって、重複する説明を回避するために、第2実施例のハイブリッド自動車220のハード構成のうち第1実施例のハイブリッド自動車20のハード構成と同一の構成については同一の符号を付し、その説明を省略する。
【0038】
第2実施例のハイブリッド自動車220のオートマチックトランスミッション98は、動力分配統合機構30のリングギヤやモータMG2のロータが接続された入力軸36aと駆動輪63a,63bにデファレンシャルギヤ62を介して接続された出力軸36bとに接続され、油圧駆動によるニュートラル(中立),1速〜4速のいずれかを選択する周知の4速自動変速機として構成されている。オートマチックトランスミッション98は、HVECU70により、シフトポジションSPがNポジションやPポジションのときには、ニュートラルとなるよう制御され、シフトポジションSPがDポジションのときには、アクセル開度Accと車速Vとによる周知の変速線(3つのアップシフト線と3つのダウンシフト線)に基づいて対応する1速〜4速のいずれかとなるようアップシフトやダウンシフトによる制御が行なわれる。
【0039】
第2実施例のハイブリッド自動車220では、図2の駆動制御ルーチンに代えて図9の駆動制御ルーチンを実行する。図9の駆動制御ルーチンは、データ入力処理でアクセル開度AccやブレーキペダルポジションBPなどに加えてオートマチックトランスミッション98の変速段を入力する点(ステップS100B)と、シフトポジションSPがDポジションのときにはオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいて動作ラインLを設定する点(ステップS120B)を除いて図2の駆動制御ルーチンと同様である。なお、要求トルクTr*は駆動軸36に代えて出力軸36bに要求されるトルクを用いればよく、要求パワーPe*の計算では駆動軸36の回転数Nrに代えて出力軸36bの回転数を用いればよく、モータMG1,MG2のトルク指令Tm1*,Tm2*の計算で駆動軸36の回転数Nrを用いるときにはモータMG2の回転数Nm2を用いればよい。上述の図2の駆動制御ルーチンでは、これらのことを考慮して駆動軸36の回転数Nrとして車速Vに換算係数kを乗じたものを用いており、モータMG1,MG2のトルク指令Tm1*,Tm2*の計算では駆動軸36の回転数Nrを用いずにモータMG2の回転数Nm2を用いているため、オートマチックトランスミッション98を搭載する第2実施例のハイブリッド自動車220の駆動制御ルーチンとしても同様に用いることができる。
【0040】
第2実施例のハイブリッド自動車220のHVECU70が実行する駆動制御ルーチンでは、オートマチックトランスミッション98の変速段を含む各種データを入力し(ステップS100B)、図3の要求トルク設定マップを用いてアクセル開度Accと車速Vとに基づいて出力軸36bに要求される要求トルクTr*を設定すると共にエンジン22に要求される要求パワーPe*を設定すると(ステップS110)、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいてエンジン22の目標運転ポイント(目標回転数Ne*および目標トルクTe*)を設定するための動作ラインLを設定する(ステップS120B)。図10にシフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPと動作ラインLとの関係の一例を示す。図10の最右欄に示されている「回避程度」は、図4と同様に、異音発生領域を燃費最適動作ラインから回避する程度を示しており、シフトポジションSPがPポジションとDポジションではPポジションの方が回避の程度が小さく、ブレーキオンとブレーキオフではブレーキオンの方が回避の程度が小さく、シフトポジションSPがDポジションのときには、低車速側の変速段(1速が最低車速段)になるほど高車速側の変速段(6速が最高車速段)に比して回避の程度が小さくなる。第2実施例では、低車速側の変速段ほどこもり音やガラ音などの異音の運転者への伝達率が小さくなる。したがって、図10のDポジションにおける「回避程度」の大小関係は、この変速段とブレーキがオンかオフかによるものとなる。これらの関係は、車両の走行を規制する程度、即ち、車両の走行を妨げる程度や高車速で走行するのに適していない程度と考えることができる。即ち、パーキングロックのオンオフは車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、ブレーキのオンオフも車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、Dポジションでは高車速で走行するのに適していない程度として低車速側の変速段ほど高車速側の変速段に比して程度が高くなる。したがって、車両の走行を規制する程度が大きいほど異音発生領域を燃費最適動作ラインから回避する程度は小さくなるものということができる。第2実施例では、こうした動作ライン(燃費最適動作ライン、動作ラインLP1〜LP2,LD1〜LD8)は、予め実験などにより定めてハイブリッド用電子制御ユニット70の図示しないROMに記憶しておき、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPが与えられると対応する動作ラインを導出することにより動作ラインLを設定するものとした。
【0041】
こうして動作ラインLを設定すると、この動作ラインを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)とを設定し(ステップS130)、入力軸36aを駆動軸36と見立ててモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し(ステップS140〜S170)、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS180)、駆動制御ルーチンを終了する。
【0042】
以上説明した第2実施例のハイブリッド自動車220によれば、車両の走行を妨げる程度や高車速で走行するのに適していない程度としての車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインLP1,LP2,LD1〜LD8を燃費最適動作ラインと共にシフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに関連させてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいて対応する動作ラインを動作ラインLとして設定し、この設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定し、目標運転ポイントでエンジン22が運転されると共に要求トルクTr*が出力軸36bに出力されるようエンジン22とモータMG1,MG2とオートマチックトランスミッション98とを制御することにより、車両の走行を規制する程度に応じて異音発生領域の燃費最適動作ラインから回避する程度を選択してエンジン22を運転することができる。この結果、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【0043】
第2実施例のハイブリッド自動車220では、オートマチックトランスミッション98として4速自動変速機を用いるものとしたが、オートマチックトランスミッション98の変速段は如何なる変速段であってもよい。即ち、オートマチックトランスミッション98として2速や3速の自動変速機としたり、5速や6速あるいは7速以上の自動変速機としても構わない。また、有段式の自動変速機に限定されるものではなく、無段変速機を用いるものとしても構わない。
【0044】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。第1実施例および第2実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「発電機」に相当し、動力分配統合機構30が「遊星歯車機構」に相当し、モータMG2が「電動機」に相当し、図2の駆動制御ルーチンや図9の駆動制御ルーチンを実行するHVECU70と、目標回転数Ne*および目標トルクTe*を受信してエンジン22を制御するエンジンECU24と、トルク指令Tm1*,Tm2*を受信してモータMG1,MG2を駆動制御するモータECU40と、バッテリ50を管理するバッテリECU52と、が「制御装置」に相当する。
【0045】
ここで、「内燃機関」としては、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関として構成されたエンジン22に限定されるものではなく、水素エンジンなど如何なるタイプの内燃機関であっても構わない。「発電機」としては、同期発電電動機として構成されたモータMG1に限定されるものではなく、誘導発電電動機など、如何なるタイプの発電機であっても構わない。「電動機」としては、同期発電電動機として構成されたモータMG2に限定されるものではなく、誘導発電電動機など、如何なるタイプの電動機であっても構わない。「遊星歯車機構」としては、上述の動力分配統合機構30に限定されるものではなく、ダブルピニオン式の遊星歯車機構を用いるものや複数の遊星歯車機構を組み合わせて4以上の軸に接続されるものなど、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続されたものであれば如何なるものとしても構わない。「制御装置」としては、HVECU70とエンジンECU24とモータECU40とバッテリECU52とによる4つの電子制御ユニットにより構成されるものに限定されるものではなく、単一の電子制御ユニットとして構成するものとしてもよいし、2つ或いは3つの電子制御ユニットにより構成されるものとしてもよいし、5つ以上の電子制御ユニットにより構成しても構わない。また、「制御装置」としては、パーキングロックのオンオフやブレーキのオンオフに基づいて動作ラインLを設定する図2の駆動制御ルーチンを実行するものやパーキングロックのオンオフやブレーキのオンオフに加えてオートマチックトランスミッション98の変速段に基づいて動作ラインLを設定する図9の駆動制御ルーチンを実行するものに限定されるものではなく、パーキングロックのオンオフだけに基づいて動作ラインLを設定するものとしたり、ブレーキのオンオフだけに基づいて動作ラインLを設定するものとしたりするなど、内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを動作ラインLとして設定するものであれば如何なる処理としても構わない。
【0046】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0047】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0048】
本発明は、ハイブリッド車の制御装置の製造産業などに利用可能である。
【符号の説明】
【0049】
20,120,220 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、51 温度センサ、52 バッテリ用電子制御ユニット(バッテリECU)、62 デファレンシャルギヤ、63a,63b 駆動輪、64a,64b 車輪、70 ハイブリッド用電子制御ユニット、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、90 パーキングロック機構、92 パーキングギヤ、94 パーキングロックポール、98 オートマチックトランスミッション、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、ハイブリッド車の制御装置に関し、詳しくは、内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置に関する。
【背景技術】
【0002】
従来、この種のハイブリッド車の制御装置としては、エンジンと、モータジェネレータと、車軸とエンジンの出力軸とモータジェネレータの回転軸とに接続された動力分割機構とを備えるハイブリッド車の制御装置において、ガラ音を回避するためのエンジン動作点におけるエンジン回転数を排気再循環(EGR)の割合(EGR率)が大きいほど高く設定するものが提案されている(例えば、特許文献1参照)。この装置では、EGR率が大きいほどエンジン動作点におけるエンジン回転数を高く設定することにより、ガラ音の発生を適切に抑制している。
【0003】
また、同様の構成のハイブリッド車の制御装置において、車速が大きいほどエンジンの低回転領域におけるトルクが大きくなるよう動作ラインを設定してエンジンを運転制御するものも提案されている(例えば、特許文献2参照)。この装置では、車速が大きいほど走行による騒音が大きくなり、エンジンを低回転高トルクの領域で運転することにより生じ得る異音をマスクすることにより、異音による違和感を運転者に与えるのを抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−179856号公報
【特許文献2】特開2007−022296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
こもり音やガラ音などの異音は、起振源であるエンジントルクの変動が変速機などの機械的機構に伝達することによって生じる機械的機構の歯打ちに起因しており、この歯打ち音が機械的機構やブレーキ,パーキングブレーキなどによってボディに伝達し、運転者に異音として到達すると考えられる。このため、機械的機構やブレーキ,パーキングブレーキの状態により異音の運転者への到達の程度が変化する。したがって、こうした機械的機構やブレーキ,パーキングブレーキの状態に応じて異音の運転者への到達の程度を考慮してエンジンを運転することにより、異音による運転者への不快感を抑制しつつハイブリッド車の燃費を向上させることができる。
【0006】
本発明のハイブリッド車の制御装置は、異音による運転者への不快感を抑制しつつハイブリッド車の燃費の向上を図ることを主目的とする。
【課題を解決するための手段】
【0007】
本発明のハイブリッド車の制御装置は、上述の主目的を達成するために以下の手段を採った。
【0008】
本発明のハイブリッド車の制御装置は、
内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置であって、
前記内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を該燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて前記内燃機関を運転すると共に走行に要求される駆動力によって走行するよう前記内燃機関と前記発電機と前記電動機とを制御する、
ことを特徴とする。
【0009】
本発明のハイブリッド車の制御装置では、内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて内燃機関を運転する。これは、車両の走行を規制する程度が大きいほど、異音の運転者への到達の程度が小さくなると考えられることに基づく。したがって、上述の制御により、異音による運転者への不快感を抑制しつつハイブリッド車の燃費をより向上させることができる。ここで、「車両の走行を規制する程度」は、車両の走行の妨げの程度の意味やより高車速で走行するのに適していない程度の意味が含まれる。例えば、パーキングブレーキによるパーキングロックや運転者のブレーキ操作によるブレーキは車両の走行を妨げるものとなり、シーケンシャルシフト(仮想シフト)を有するものでは、低車速側のシフト位置ほど高車速で走行するのに適していないものとなる。
【0010】
こうした本発明のハイブリッド車の制御装置において、パーキングロックがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御するものとすることもできるし、ブレーキがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御するものとすることもできる。パーキングロックがオンのときにはオフのときに比して車両の走行を規制する程度、即ち車両の走行を妨げる程度が大きくなり、ブレーキがオンのときにはオフのときに比して車両の走行を規制する程度が大きくなるからである。
【0011】
また、本発明のハイブリッド車の制御装置において、シフトポジションが低車速側のポジションほど高車速側のポジションに比して前記異音発生領域の回避の程度が小さくなる動作ラインを用いて制御するものとすることもできる。シフトポジションが低車速側のポジションほど高車速側のポジションに比して車両の走行を規制する程度、高車速で走行するのに適していない程度が大きくなると考えられるからである。
【図面の簡単な説明】
【0012】
【図1】本発明の第1実施例の車両の制御装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。
【図2】第1実施例のHVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図3】要求トルク設定用マップの一例を示す説明図である。
【図4】シフトポジションSPとブレーキペダルポジションBPと動作ラインLとの関係の一例を示す説明図である。
【図5】燃費最適動作ラインと動作ラインL1〜L4とエンジン22の運転ポイントとの関係の一例を示す説明図である。
【図6】パーキングロック機構90によるパーキングロックのオンオフの状態とエンジン22の回転数Neとこもり音やガラ音などの異音が車両ボディなどにより運転者に伝達される伝達率との関係の一例を示す説明図である。
【図7】変形例のハイブリッド自動車120の構成の概略を示す構成図である。
【図8】第2実施例の車両の制御装置を搭載するハイブリッド自動車220の構成の概略を示す構成図である。
【図9】第2実施例のHVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。
【図10】シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPと動作ラインLとの関係の一例を示す説明図である。
【発明を実施するための形態】
【0013】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例1】
【0014】
図1は、本発明の第1実施例のの車両の制御装置を搭載するハイブリッド自動車20の構成の概略を示す構成図である。第1実施例のハイブリッド自動車20は、図示するように、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関として構成されたエンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して複数のピニオンギヤを連結したキャリアが接続されると共に駆動輪63a,63bにデファレンシャルギヤ62を介して連結された駆動軸36にリングギヤが接続された遊星歯車機構として構成された3軸式の動力分配統合機構30と、例えば周知の同期発電電動機として構成されて動力分配統合機構30のサンギヤにロータが接続されたモータMG1と、例えば周知の同期発電電動機として構成されて駆動軸36にロータが接続されたモータMG2と、モータMG1,MG2を駆動するためのインバータ41,42と、例えばリチウムイオン二次電池として構成されてインバータ41,42を介してモータMG1,MG2と電力のやりとりを行なうバッテリ50と、駆動軸36に取り付けられたパーキングロック機構90と、車両全体をコントロールするハイブリッド用電子制御ユニット(以下、HVECUという)70と、を備える。
【0015】
エンジン22は、エンジン用電子制御ユニット(以下、エンジンECUという)24により吸入空気量調節制御や燃料噴射制御,点火制御などの運転制御を受けている。エンジンECU24には、エンジン22の運転状態を検出する各種センサからの信号、例えば、エンジン22のクランクシャフト26のクランク角を検出する図示しないクランクポジションセンサからのクランクポジションなどが入力されている。また、エンジンECU24からは、エンジン22を運転制御するための種々の制御信号、例えば、スロットルバルブや燃料噴射弁,点火プラグ,可変バルブタイミング機構への駆動制御信号などが出力されている。エンジンECU24は、HVECU70と通信しており、HVECU70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータをHVECU70に出力する。なお、エンジンECU24は、図示しないクランクポジションセンサからのクランクポジションに基づいてクランクシャフト26の回転数、即ちエンジン22の回転数Neも演算している。
【0016】
モータMG1,MG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2のロータの回転位置を検出する回転位置検出センサ43,44からの信号や図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流などが入力されており、モータECU40からは、インバータ41,42へのスイッチング制御信号が出力されている。モータECU40は、HVECU70と通信しており、HVECU70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをHVECU70に出力する。なお、モータECU40は、回転位置検出センサ43,44からの信号に基づいてモータMG1,MG2の回転数Nm1,Nm2も演算している。
【0017】
バッテリ50は、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧やバッテリ50の正極側の出力端子に取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた温度センサ51からの電池温度Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりHVECU70に出力する。また、バッテリECU52は、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいてバッテリ50に蓄えられている蓄電量の全容量(蓄電容量)に対する割合である蓄電割合SOCを演算したり、演算した蓄電割合SOCと電池温度Tbとに基づいてバッテリ50を充放電してもよい最大許容電力である入出力制限Win,Woutを演算したりしている。なお、バッテリ50の入出力制限Win,Woutは、電池温度Tbに基づいて入出力制限Win,Woutの基本値を設定し、バッテリ50の蓄電割合SOCに基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定することができる。
【0018】
パーキングロック機構90は、駆動軸36に取り付けられたパーキングギヤ92と、パーキングギヤ92と噛み合ってその回転駆動を停止した状態でロックするパーキングロックポール94と、を備える。パーキングロックポール94は、他のポジションから駐車ポジション(Pポジション)への操作信号または駐車ポジションから他のポジションへの操作信号を入力したHVECU70によって図示しないアクチュエータが駆動制御されることによって作動し、パーキングギヤ92との噛合およびその解除によってパーキングロックおよびその解除を行なう。
【0019】
HVECU70は、図示しないCPUを中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROMや、データを一時的に記憶するRAM、入出力ポートおよび通信ポートを備える。HVECU70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速Vなどが入力ポートを介して入力されている。HVECU70からは、パーキングロック機構90の図示しないアクチュエータへの駆動制御信号などが出力ポートを介して出力されている。HVECU70は、前述したように、エンジンECU24やモータECU40,バッテリECU52と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52と各種制御信号やデータのやりとりを行なっている。
【0020】
また、第1実施例のハイブリッド自動車20では、シフトレバー81のシフトポジションSPとして、駐車時に用いる駐車ポジション(Pポジション)、後進走行用のリバースポジション(Rポジション)、中立のニュートラルポジション(Nポジション)、前進走行用の通常のドライブポジション(Dポジション)の他に、アクセルオン時の駆動力の設定等はDポジションと同一であるが走行中のアクセルオフ時に作用させる制動力がDポジションより大きく設定されるブレーキポジション(Bポジション)、なお、第1実施例では、Bポジションでは、走行中にアクセルオフされたときには、燃料噴射を停止した状態でエンジン22をモータMG1によってモータリングすることによりエンジン22を強制的に回転させその回転抵抗を制動力として駆動軸36に作用させるブレーキ制御と、モータMG2を回生制御することによって制動力を駆動軸36に作用させるブレーキ制御とを併用している。
【0021】
ここで、第1実施例の車両の制御装置としては、HVECU70とエンジンECU24とモータECU40とバッテリECU52が該当する。
【0022】
こうして構成された第1実施例のハイブリッド自動車20では、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸36に出力すべき要求トルクを計算し、この要求トルクに対応する要求動力が駆動軸36に出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されて駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや、要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って要求動力が駆動軸36に出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード,エンジン22の運転を停止してモータMG2からの要求動力に見合う動力を駆動軸36に出力するよう運転制御するモータ運転モードなどがある。なお、トルク変換運転モードおよび充放電運転モードは、いずれもエンジン22の運転を伴って要求動力が駆動軸36に出力されるようエンジン22とモータMG1,MG2とを制御するモードであるから、両者を合わせてエンジン運転モードとして考えることができる。
【0023】
第1実施例のハイブリッド自動車20では、エンジン運転モードで運転しているときに、エンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を運転停止した方がよいとして定められた閾値Pstop以下に至ると、エンジン22の運転を停止してモータ運転モードに移行する。そして、モータ運転モードで運転しているときに、要求トルクTr*に駆動軸36の回転数Nrを乗じて得られる走行用パワーPdrv*からバッテリ50の充放電要求パワーPb*を減じて得られるエンジン22の要求パワーPe*がエンジン22を効率よく運転するためにエンジン22を始動した方がよいとして定められた閾値Pstart以上に至ると、エンジン22を始動してエンジン運転モードに移行する。また、第1実施例のハイブリッド自動車20では、シフトポジションSPが駐車ポジション(Pポジション)のときには、エンジン22が運転停止中でバッテリ50の蓄電割合SOCが充電開始用の蓄電割合SOCとしての閾値Slo(例えば、35%や40%など)以下のときにエンジン22を始動し、バッテリ50の蓄電割合SOCが充電終了の蓄電割合SOCとしての閾値Shi(例えば、60%や65%など)以上に至るまでエンジン22からの動力を用いてモータMG1によって発電を行なってバッテリ50を充電する。このとき、動力分配統合機構30を介して駆動軸36にトルクが作用するため、パーキングロック機構90によって駆動軸36がロックされていないときには、このトルクをキャンセルするキャンセルトルクと図示しないギヤ機構などのガタ詰めを行なうためのガタ詰めトルクとの和のトルクをモータMG2から出力する。パーキングロック機構90によって駆動軸36がロックされているときには、モータMG2からのトルク出力は行なわれない。
【0024】
次に、こうして構成された第1実施例のハイブリッド自動車20の動作、特に、エンジン22を比較的低回転数高トルクで運転しているときの動作について説明する。図2は、HVECU70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0025】
駆動制御ルーチンが実行されると、HVECU70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,ブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,シフトポジションセンサ82からのシフトポジションSP,モータMG1,MG2の回転数Nm1,Nm2,バッテリ50の入出力制限Win,Woutなど制御に必要なデータを入力する処理を実行する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、回転位置検出センサ43,44により検出されるモータMG1,MG2の回転子の回転位置に基づいて計算されたものをモータECU40から通信により入力するものとした。また、バッテリ50の入出力制限Win,Woutは、温度センサ51により検出されたバッテリ50の電池温度Tbとバッテリ50の残容量(SOC)とに基づいて設定されたものをバッテリECU52から通信により入力するものとした。
【0026】
こうしてデータを入力すると、入力したアクセル開度Accと車速Vとに基づいて車両に要求されるトルクとして駆動輪63a,63bに連結された駆動軸36に出力すべき要求トルクTr*とエンジン22に要求される要求パワーPe*とを設定する(ステップS110)。要求トルクTr*は、第1実施例では、アクセル開度Accと車速Vと要求トルクTr*との関係を予め定めて要求トルク設定用マップとしてHVECU70の図示しないROMに記憶しておき、アクセル開度Accと車速Vとが与えられると記憶したマップから対応する要求トルクTr*を導出して設定するものとした。図3に要求トルク設定用マップの一例を示す。要求パワーPe*は、設定した要求トルクTr*に駆動軸36の回転数Nrを乗じたものとバッテリ50が要求する充放電要求パワーPb*とロスLossとの和として計算することができる。なお、駆動軸36の回転数Nrは、車速Vに換算係数kを乗じることによって求めたり、モータMG2の回転数Nm2として求めることができる。
【0027】
続いて、入力したシフトポジションSPとブレーキペダルポジションBPとに基づいてエンジン22の目標運転ポイント(目標回転数Ne*および目標トルクTe*)を設定するための動作ラインLを設定し(ステップS120)、設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定する(ステップS130)。図4にシフトポジションSPとブレーキペダルポジションBPと動作ラインLとの関係の一例を示し、図5に燃費最適動作ラインと動作ラインL1〜L4とエンジン22の運転ポイント(回転数,トルク)との関係の一例を示す。図5の燃費最適動作ラインは、エンジン22の燃費が最適となる動作ラインとして予め定められたものであり、エンジン22の特性に基づいて実験などにより求めることができる。動作ラインL1〜L4は、比較的低回転高トルクの領域(こもり音やガラ音などの異音が生じる異音発生領域)におけるラインが燃費最適動作ラインと異なるものであり、L1,L2,L3,L4の順に異音発生領域を燃費最適動作ラインから段階的に回避する。図4の最右欄に示されている「回避程度」は、この異音発生領域を燃費最適動作ラインから回避する程度を示しており、シフトポジションSPがPポジションとDポジションではPポジションの方が回避の程度が小さく、ブレーキオンとブレーキオフではブレーキオンの方が回避の程度が小さくなる。図6にパーキングロック機構90によるパーキングロックのオンオフの状態とエンジン22の回転数Neとこもり音やガラ音などの異音が車両ボディなどにより運転者に伝達される伝達率(dB)との関係の一例を示す。図示するように、エンジン22の実使用領域では、パーキングロックがオンのときの方がオフのときに比して伝達率が小さいため、パーキングロックがオンのときの方がオフのときに比してこもり音やガラ音などの異音は運転者に伝達され難いものとなる。このため、パーキングロックがオンのときの方がオフのときに比して異音発生領域の燃費最適動作ラインからの回避の程度を小さくしてもよいことになる。図示しないが、運転者によってブレーキペダル85が踏み込まれているか否か(即ちブレーキのオンオフ)によるこもり音やガラ音などの異音の運転者への伝達率も、程度の差はあるが、パーキングロックのオンオフによる伝達率と同様の関係となる。図4のPポジションとDポジションにおける「回避程度」の大小関係は、このパーキングロックがオンかオフか、ブレーキがオンかオフかによるものとなる。これらの関係は、車両の走行を規制する程度、即ち、車両の走行を妨げる程度と考えることができる。即ち、パーキングロックのオンオフは車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、ブレーキのオンオフも車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高くる。したがって、車両の走行を規制する程度が大きいほど異音発生領域を燃費最適動作ラインから回避する程度は小さくなるものということができる。第1実施例では、こうした動作ライン(燃費最適動作ライン、動作ラインL1〜L4)は、予め実験などにより定めてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとブレーキペダルポジションBPが与えられると対応する動作ラインを導出することにより動作ラインLを設定するものとした。エンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)は、図5に示すように、要求パワーPe*が一定の曲線(図5の破線)と動作ラインLとの交点のトルクと回転数として求めることができる。例えば、動作ラインLとして燃費最適動作ラインが設定されたときには要求パワーPe*と燃費最適動作ラインとの交点の回転数N0とトルクT0が目標回転数Ne*と目標トルクTe*として設定される。動作ラインLとして、動作ラインL1(Pポジションでブレーキがオン),動作ラインL2(Pポジションでブレーキがオフ),動作ラインL3(Dポジションでブレーキがオン),動作ラインL4(Dポジションでブレーキがオン)のいずれかが設定されたときには要求パワーPe*と設定された動作ラインLとの交点の回転数(N1〜N4のうち対応する値)とトルク(T1〜T4の対応する値)が目標回転数Ne*と目標トルクTe*として設定される。
【0028】
次に、設定した目標回転数Ne*と駆動軸36の回転数Nr(Nm2/Gr)と動力分配統合機構30のギヤ比ρとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と現在の回転数Nm1とに基づいて式(2)によりモータMG1のトルク指令Tm1*を計算する(ステップS140)。ここで、式(1)は、動力分配統合機構30の回転要素に対する力学的な関係式である。また、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0029】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/ρ (1)
Tm1*=ρ・Te*/(1+ρ)+k1(Nm1*-Nm1)+k2∫(Nm1*-Nm1)dt (2)
【0030】
こうしてモータMG1の目標回転数Nm1*とトルク指令Tm1*とを計算すると、バッテリ50の入出力制限Win,Woutと計算したモータMG1のトルク指令Tm1*に現在のモータMG1の回転数Nm1を乗じて得られるモータMG1の消費電力(発電電力)との偏差をモータMG2の回転数Nm2で割ることによりモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(3)および式(4)により計算すると共に(ステップS150)、要求トルクTr*とトルク指令Tm1*と動力分配統合機構30のギヤ比ρを用いてモータMG2から出力すべきトルクとしての仮モータトルクTm2tmpを式(5)により計算し(ステップS160)、計算したトルク制限Tmin,Tmaxで仮モータトルクTm2tmpを制限した値としてモータMG2のトルク指令Tm2*を設定する(ステップS170)。このようにモータMG2のトルク指令Tm2*を設定することにより、駆動軸36に出力する要求トルクTr*を、バッテリ50の入出力制限Win,Woutの範囲内で制限したトルクとして設定することができる。
【0031】
Tmin=(Win-Tm1*・Nm1)/Nm2 (3)
Tmax=(Wout-Tm1*・Nm1)/Nm2 (4)
Tm2tmp=Tr*+Tm1*/ρ (5)
【0032】
こうしてエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS180)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における燃料噴射制御や点火制御などの制御を行なう。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0033】
以上説明した第1実施例の車両の制御装置を搭載するハイブリッド自動車20によれば、車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインL1〜L4を燃費最適動作ラインと共にシフトポジションSPとブレーキペダルポジションBPとに関連させてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとブレーキペダルポジションBPとに基づいて対応する動作ラインを動作ラインLとして設定し、この設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定し、目標運転ポイントでエンジン22が運転されると共に要求トルクTr*が駆動軸36に出力されるようエンジン22とモータMG1,MG2を制御することにより、車両の走行を規制する程度に応じて異音発生領域の燃費最適動作ラインから回避する程度を選択してエンジン22を運転することができる。この結果、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【0034】
第1実施例のハイブリッド自動車20では、ブレーキのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮するものとしたが、ブレーキのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮しないものとしてもよい。この場合、動作ラインLの設定では、例えば、図4においてシフトポジションSPに対応するポジションのブレーキオフの動作ラインを用いればよい。この場合、動作ラインLの設定では、シフトポジションSPがPポジションのときには動作ラインL2を設定し、シフトポジションSPがDポジションのときには動作ラインL4を設定するものとすればよい。
【0035】
第1実施例のハイブリッド自動車20では、パーキングロックのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮するものとしたが、パーキングロックのオンオフによる異音発生領域の燃費最適動作ラインから回避する程度を考慮しないものとしてもよい。この場合、動作ラインLの設定では、例えば、図4においてシフトポジションSPがDポジションのときのものを用いればよい。即ち、ブレーキがオンのときには動作ラインL3を設定し、ブレーキがオフのときには動作ラインL4を設定するものとすればよい。
【0036】
第1実施例のハイブリッド自動車20では、モータMG2の動力を駆動軸36に出力するものとしたが、図7の変形例のハイブリッド自動車120に例示するように、モータMG2の動力を駆動軸36が接続された車軸(駆動輪63a,63bが接続された車軸)とは異なる車軸(図7における車輪64a,64bに接続された車軸)に接続するものとしてもよい。
【実施例2】
【0037】
次に、本発明の第2実施例の車両の制御装置を搭載するハイブリッド自動車220について説明する。図8は、第2実施例のハイブリッド自動車220の構成の概略を示す構成図である。第2実施例のハイブリッド自動車220のハード構成は、図示するように、駆動軸36のモータMG2が取り付けられた位置より後段にオートマチックトランスミッション98が取り付けられている点を除いて、図1に示す第1実施例のハイブリッド自動車20のハード構成と同様である。したがって、重複する説明を回避するために、第2実施例のハイブリッド自動車220のハード構成のうち第1実施例のハイブリッド自動車20のハード構成と同一の構成については同一の符号を付し、その説明を省略する。
【0038】
第2実施例のハイブリッド自動車220のオートマチックトランスミッション98は、動力分配統合機構30のリングギヤやモータMG2のロータが接続された入力軸36aと駆動輪63a,63bにデファレンシャルギヤ62を介して接続された出力軸36bとに接続され、油圧駆動によるニュートラル(中立),1速〜4速のいずれかを選択する周知の4速自動変速機として構成されている。オートマチックトランスミッション98は、HVECU70により、シフトポジションSPがNポジションやPポジションのときには、ニュートラルとなるよう制御され、シフトポジションSPがDポジションのときには、アクセル開度Accと車速Vとによる周知の変速線(3つのアップシフト線と3つのダウンシフト線)に基づいて対応する1速〜4速のいずれかとなるようアップシフトやダウンシフトによる制御が行なわれる。
【0039】
第2実施例のハイブリッド自動車220では、図2の駆動制御ルーチンに代えて図9の駆動制御ルーチンを実行する。図9の駆動制御ルーチンは、データ入力処理でアクセル開度AccやブレーキペダルポジションBPなどに加えてオートマチックトランスミッション98の変速段を入力する点(ステップS100B)と、シフトポジションSPがDポジションのときにはオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいて動作ラインLを設定する点(ステップS120B)を除いて図2の駆動制御ルーチンと同様である。なお、要求トルクTr*は駆動軸36に代えて出力軸36bに要求されるトルクを用いればよく、要求パワーPe*の計算では駆動軸36の回転数Nrに代えて出力軸36bの回転数を用いればよく、モータMG1,MG2のトルク指令Tm1*,Tm2*の計算で駆動軸36の回転数Nrを用いるときにはモータMG2の回転数Nm2を用いればよい。上述の図2の駆動制御ルーチンでは、これらのことを考慮して駆動軸36の回転数Nrとして車速Vに換算係数kを乗じたものを用いており、モータMG1,MG2のトルク指令Tm1*,Tm2*の計算では駆動軸36の回転数Nrを用いずにモータMG2の回転数Nm2を用いているため、オートマチックトランスミッション98を搭載する第2実施例のハイブリッド自動車220の駆動制御ルーチンとしても同様に用いることができる。
【0040】
第2実施例のハイブリッド自動車220のHVECU70が実行する駆動制御ルーチンでは、オートマチックトランスミッション98の変速段を含む各種データを入力し(ステップS100B)、図3の要求トルク設定マップを用いてアクセル開度Accと車速Vとに基づいて出力軸36bに要求される要求トルクTr*を設定すると共にエンジン22に要求される要求パワーPe*を設定すると(ステップS110)、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいてエンジン22の目標運転ポイント(目標回転数Ne*および目標トルクTe*)を設定するための動作ラインLを設定する(ステップS120B)。図10にシフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPと動作ラインLとの関係の一例を示す。図10の最右欄に示されている「回避程度」は、図4と同様に、異音発生領域を燃費最適動作ラインから回避する程度を示しており、シフトポジションSPがPポジションとDポジションではPポジションの方が回避の程度が小さく、ブレーキオンとブレーキオフではブレーキオンの方が回避の程度が小さく、シフトポジションSPがDポジションのときには、低車速側の変速段(1速が最低車速段)になるほど高車速側の変速段(6速が最高車速段)に比して回避の程度が小さくなる。第2実施例では、低車速側の変速段ほどこもり音やガラ音などの異音の運転者への伝達率が小さくなる。したがって、図10のDポジションにおける「回避程度」の大小関係は、この変速段とブレーキがオンかオフかによるものとなる。これらの関係は、車両の走行を規制する程度、即ち、車両の走行を妨げる程度や高車速で走行するのに適していない程度と考えることができる。即ち、パーキングロックのオンオフは車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、ブレーキのオンオフも車両の走行を妨げる程度としてオンのときの方がオフのときに比して程度が高く、Dポジションでは高車速で走行するのに適していない程度として低車速側の変速段ほど高車速側の変速段に比して程度が高くなる。したがって、車両の走行を規制する程度が大きいほど異音発生領域を燃費最適動作ラインから回避する程度は小さくなるものということができる。第2実施例では、こうした動作ライン(燃費最適動作ライン、動作ラインLP1〜LP2,LD1〜LD8)は、予め実験などにより定めてハイブリッド用電子制御ユニット70の図示しないROMに記憶しておき、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPが与えられると対応する動作ラインを導出することにより動作ラインLを設定するものとした。
【0041】
こうして動作ラインLを設定すると、この動作ラインを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)とを設定し(ステップS130)、入力軸36aを駆動軸36と見立ててモータMG1,MG2のトルク指令Tm1*,Tm2*を設定し(ステップS140〜S170)、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS180)、駆動制御ルーチンを終了する。
【0042】
以上説明した第2実施例のハイブリッド自動車220によれば、車両の走行を妨げる程度や高車速で走行するのに適していない程度としての車両の走行を規制する程度が大きいほど異音発生領域の燃費最適動作ラインから回避する程度が小さくなる複数の動作ラインLP1,LP2,LD1〜LD8を燃費最適動作ラインと共にシフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに関連させてHVECU70の図示しないROMに記憶しておき、シフトポジションSPとオートマチックトランスミッション98の変速段とブレーキペダルポジションBPとに基づいて対応する動作ラインを動作ラインLとして設定し、この設定した動作ラインLを用いてエンジン22の目標運転ポイント(目標回転数Ne*と目標トルクTe*)を設定し、目標運転ポイントでエンジン22が運転されると共に要求トルクTr*が出力軸36bに出力されるようエンジン22とモータMG1,MG2とオートマチックトランスミッション98とを制御することにより、車両の走行を規制する程度に応じて異音発生領域の燃費最適動作ラインから回避する程度を選択してエンジン22を運転することができる。この結果、こもり音やガラ音などの異音により運転者に不快感を与えるのを抑制することができると共に車両の燃費の向上を図ることができる。
【0043】
第2実施例のハイブリッド自動車220では、オートマチックトランスミッション98として4速自動変速機を用いるものとしたが、オートマチックトランスミッション98の変速段は如何なる変速段であってもよい。即ち、オートマチックトランスミッション98として2速や3速の自動変速機としたり、5速や6速あるいは7速以上の自動変速機としても構わない。また、有段式の自動変速機に限定されるものではなく、無段変速機を用いるものとしても構わない。
【0044】
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。第1実施例および第2実施例では、エンジン22が「内燃機関」に相当し、モータMG1が「発電機」に相当し、動力分配統合機構30が「遊星歯車機構」に相当し、モータMG2が「電動機」に相当し、図2の駆動制御ルーチンや図9の駆動制御ルーチンを実行するHVECU70と、目標回転数Ne*および目標トルクTe*を受信してエンジン22を制御するエンジンECU24と、トルク指令Tm1*,Tm2*を受信してモータMG1,MG2を駆動制御するモータECU40と、バッテリ50を管理するバッテリECU52と、が「制御装置」に相当する。
【0045】
ここで、「内燃機関」としては、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関として構成されたエンジン22に限定されるものではなく、水素エンジンなど如何なるタイプの内燃機関であっても構わない。「発電機」としては、同期発電電動機として構成されたモータMG1に限定されるものではなく、誘導発電電動機など、如何なるタイプの発電機であっても構わない。「電動機」としては、同期発電電動機として構成されたモータMG2に限定されるものではなく、誘導発電電動機など、如何なるタイプの電動機であっても構わない。「遊星歯車機構」としては、上述の動力分配統合機構30に限定されるものではなく、ダブルピニオン式の遊星歯車機構を用いるものや複数の遊星歯車機構を組み合わせて4以上の軸に接続されるものなど、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続されたものであれば如何なるものとしても構わない。「制御装置」としては、HVECU70とエンジンECU24とモータECU40とバッテリECU52とによる4つの電子制御ユニットにより構成されるものに限定されるものではなく、単一の電子制御ユニットとして構成するものとしてもよいし、2つ或いは3つの電子制御ユニットにより構成されるものとしてもよいし、5つ以上の電子制御ユニットにより構成しても構わない。また、「制御装置」としては、パーキングロックのオンオフやブレーキのオンオフに基づいて動作ラインLを設定する図2の駆動制御ルーチンを実行するものやパーキングロックのオンオフやブレーキのオンオフに加えてオートマチックトランスミッション98の変速段に基づいて動作ラインLを設定する図9の駆動制御ルーチンを実行するものに限定されるものではなく、パーキングロックのオンオフだけに基づいて動作ラインLを設定するものとしたり、ブレーキのオンオフだけに基づいて動作ラインLを設定するものとしたりするなど、内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを動作ラインLとして設定するものであれば如何なる処理としても構わない。
【0046】
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。
【0047】
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。
【産業上の利用可能性】
【0048】
本発明は、ハイブリッド車の制御装置の製造産業などに利用可能である。
【符号の説明】
【0049】
20,120,220 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、51 温度センサ、52 バッテリ用電子制御ユニット(バッテリECU)、62 デファレンシャルギヤ、63a,63b 駆動輪、64a,64b 車輪、70 ハイブリッド用電子制御ユニット、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、90 パーキングロック機構、92 パーキングギヤ、94 パーキングロックポール、98 オートマチックトランスミッション、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置であって、
前記内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を該燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて前記内燃機関を運転すると共に走行に要求される駆動力によって走行するよう前記内燃機関と前記発電機と前記電動機とを制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項2】
請求項1記載のハイブリッド車の制御装置であって、
パーキングロックがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項3】
請求項1または2記載のハイブリッド車の制御装置であって、
ブレーキがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項4】
請求項1ないし3のうちのいずれか一つの請求項に記載のハイブリッド車の制御装置であって、
シフトポジションが低車速側のポジションほど高車速側のポジションに比して前記異音発生領域の回避の程度が小さくなる動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項1】
内燃機関と、動力を入出力可能な発電機と、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸の3軸に3つの回転要素が接続された遊星歯車機構と、前記駆動軸に動力を入出力する電動機と、を備えるハイブリッド車の制御装置であって、
前記内燃機関の燃費が最適となる動作ラインとして予め定められた燃費最適動作ラインにおいて異音が発生する異音発生領域を該燃費最適動作ラインから段階的に回避して得られる複数の動作ラインのうち車両の走行を規制する程度が大きいほど回避の程度が小さくなる傾向の動作ラインを用いて前記内燃機関を運転すると共に走行に要求される駆動力によって走行するよう前記内燃機関と前記発電機と前記電動機とを制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項2】
請求項1記載のハイブリッド車の制御装置であって、
パーキングロックがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項3】
請求項1または2記載のハイブリッド車の制御装置であって、
ブレーキがオンのときにはオフのときに比して前記異音発生領域の回避の程度が小さい動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【請求項4】
請求項1ないし3のうちのいずれか一つの請求項に記載のハイブリッド車の制御装置であって、
シフトポジションが低車速側のポジションほど高車速側のポジションに比して前記異音発生領域の回避の程度が小さくなる動作ラインを用いて制御する、
ことを特徴とするハイブリッド車の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−67299(P2013−67299A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208163(P2011−208163)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]