
ハイブリッド車の定速走行制御装置
【課題】 定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供すること。
【解決手段】 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定する手段とした。
【解決手段】 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定する手段とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置の技術分野に属する。
【背景技術】
【0002】
従来の定速走行制御装置(ASCD:Auto Speed Control Device)は、自車の車速が下限車速以上での走行中であって、かつ、ドライバーによりASCDスイッチの操作を行うと、原則的にスイッチ操作時の車速を維持するが、この定速走行制御中に前方車両等の障害物が検知された場合、自車と障害物との間隔や相対車速等を基に、車間一定制御を適用することで、安全性を確保するようにしている。そして、ドライバーが前方障害物等に気づき、停車(制動)しようとしても、車両発生トルクが大きく、停車不能とならないように、規定車速(=下限車速)以下では、定速走行制御に移行しないように設定されている(例えば、特許文献1参照)。
【特許文献1】特開平6−119599号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の車両の定速走行制御装置を、エンジンとモータを駆動源とするハイブリッド車に適用する場合、定速走行制御中の出力トルクの設定を、エンジンとモータとに適切に配分する必要がある。この定速走行制御中において、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合、例えば、モータへのトルク配分が高い走行状況でモータ強電系(バッテリ、モータ、発電機、インバータなど)に出力制限がかかると、設定される出力トルク上限値が低い値となり、ASCDスイッチをONにしたままでドライバーとしては定速走行制御の継続を望んでいるにもかかわらず、車速が一定以下となり、定速走行制御がキャンセルされる。この結果、定速走行制御の適用状況が狭くなってしまう、という問題があった。
【0004】
本発明は、上記問題に着目してなされたもので、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明では、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することを特徴とする。
【発明の効果】
【0006】
よって、本発明のハイブリッド車の定速走行制御装置にあっては、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値が、エンジントルク上限値に設定される。例えば、モータ強電系の入出力が定速走行制御中に制限されても、エンジントルク分は確保されているため、出力トルク上限値をエンジントルク上限値に設定することで、入出力制限後も車速の低下が抑えられ、定速走行制御をそのまま継続することが可能となる。この結果、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明のハイブリッド車の定速走行制御装置を実施するための最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0008】
まず、構成を説明する。
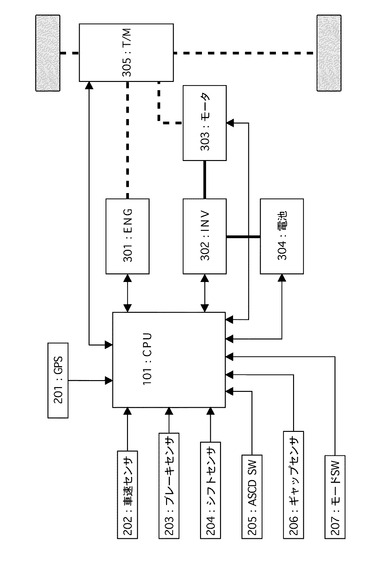
図1は左右前輪若しくは左右後輪をエンジンとモータとで駆動するハイブリッド車に適用された実施例1の定速走行制御装置を示す全体システム図である。
実施例1の定速走行制御装置は、図1に示すように、CPU101と、GPS201と、車速センサ202と、ブレーキセンサ203と、シフトセンサ204と、ASCDスイッチ205と、ギャップセンサ206と、モードスイッチ207と、エンジン301と、インバータ302と、駆動用モータ303(モータ)と、電池304(バッテリ)と、トランスミッション305と、を備えている。
【0009】
前記CPU101は、ASCD制御時、原則的に、車速センサ202からの車速検出値が下限車速以上であり、且つ、ASCDスイッチ205の入力値がONである場合、ASCDスイッチON時の車速を維持するように、シフトセンサ204の検出値を参照し、エンジン301及び駆動用モータ303のそれぞれへ出力トルク指令を送信し、トランスミッション305を介して駆動輪へとトルク出力させている。
その際、CPU101は、エンジン301、インバータ302、駆動用モータ303、電池304、トランスミッション305の状態をモニタし、温度上昇などの異常発生時や、電池SOC低下時には、当該ASCD制御ユニットの使用を制限するなども行っている。
なお、下記の3つの条件の何れかが成立した場合、
・車速センサ202からの検出値が一定値以下となった場合
・ブレーキセンサ203がON(ブレーキON)となった場合
・ASCDスイッチ205がOFF(ASCD機能OFF)となった場合
ASCD機能はキャンセルされる。
本提案システムでは、ASCD制御適用時のトルク上限値を、エンジン301の上限トルクとし、強電系システム故障時でもASCD制御を適用できることを狙っている。また、強電系システムに関して設定されている入出力制限に応じて、各ユニットに対してトルク配分を行う。
以下、システムを構成する各ユニットについて説明する。
【0010】
前記GPS201は、自車周辺の地形情報を収集し、その情報をCPU101へ送信する。前記車速センサ202は、自車速度を検出し、その情報をCPU101へ送信する。
前記ブレーキセンサ203は、ドライバーが制動指令としてブレーキペダルを踏んだことを検出し、その情報をCPU101へ送信する。
前記シフトセンサ204は、ドライバーが設定したシフトポジション情報を検出し、その情報をCPU101へ送信する。
前記ASCDスイッチ205は、ドライバーがASCD機能を適用/キャンセル指令する際に使用するスイッチであり、スイッチ信号をCPU101へ送信する。
前記ギャップセンサ206は、前方車両などの被移動体を含む障害物と自車との相対距離を検出し、その情報をCPU101へ送信する。
前記モードスイッチ207は、ドライバーがエンジン排気音質を任意に選択できるスイッチである。例えば、「サイレントモード」と「スポーティモード」の何れかを選択できるものとする。
【0011】
前記エンジン301は、CPU101からのトルク指令に応じてトランスミッション305を介して駆動輪(左右前輪または左右後輪)へとトルクを出力する。
【0012】
前記インバータ302は、CPU101からのトルク指令に応じて駆動用モータ303へとトルク出力させるよう、電池304から電気エネルギー(直流)を電気エネルギー(交流)へと変換し、供給する。駆動用モータ303が回生制動する際は、回生により発生する電気エネルギー(交流)を電池304へと戻す(充電する)よう、電気エネルギー(交流)を電気エネルギー(直流)へと変換する。
【0013】
前記駆動用モータ303は、インバータ302から供給された電気エネルギー(交流)に応じてトランスミッション305を介して駆動輪へとトルクを出力する。また、回生制動時は駆動輪の回生制動エネルギーをトランスミッション305を介して受け、これを電気エネルギー(交流)へと変換し、インバータ302を介して電池304へと電気エネルギー(直流)を戻す。
【0014】
前記電池304は、インバータ302がCPU101より受信した駆動用モータ303へのトルク指令に応じ、インバータ302へと電気エネルギー(直流)を供給する。また、回生制動時はインバータ302より電気エネルギー(直流)を受ける。
【0015】
前記トランスミッション305は、エンジン301及び駆動用モータ303の発生トルクを受け、これを駆動輪へと供給する。
【0016】
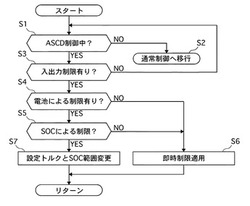
図2は実施例1のCPU101にて実行される定速走行制御処理の流れを示すフローチャートで、以下、各ステップについて説明する(定速走行制御手段)。
【0017】
ステップS1では、ASCD制御中、つまり、ASCDスイッチ205がONとなっているか否かを判断し、Yesの場合はステップS3へ移行し、Noの場合はステップS2へ移行する。
ここで、ASCDスイッチ205をONとすることでASCD制御に入ると、出力トルク上限値が、モータ強電系の入出力制限値を無視し、エンジントルク上限値に設定され、また、制動トルク上限値が、エンジンブレーキと回生制動トルクとを加味した値に設定される。そして、出力トルク設定として、エンジン301と駆動用モータ303とに適切に配分(例えば、50:50)される。
【0018】
ステップS2では、ステップS1でのASCD非制御中であるとの判断に続き、通常制御を実行する。なお、ASCD制御中においてASCD制御キャンセル条件が成立した場合には、ASCD制御から通常制御へと移行する。
【0019】
ステップS3では、ステップS1でのASCD制御中であるとの判断に続き、搭載ユニット(エンジン301、インバータ302、駆動用モータ303、電池304、トランスミッション305)のいずれかから入出力制限が設定されているか否かを確認し、Yesの場合はステップS4へ移行し、Noの場合はステップS1へ戻る(入出力制限判断手段)。
なお、エンジン301とトランスミッション305とはエンジン系を構成し、インバータ302と駆動用モータ303と電池304とはモータ強電系を構成する。
【0020】
ステップS4では、ステップS3での搭載ユニットのいずれかから入出力制限有りの判断に続き、電池304による入出力制限が有るか否かを判断し、Yesの場合はステップS5へ移行し、Noの場合はステップS6へ移行する。
【0021】
ステップS5では、ステップS4での電池304による入出力制限有りとの判断に続き、SOC(State Of Charge:バッテリ充電容量)による入出力制限であるか否かを判断し、Yesの場合はステップS7へ移行し、Noの場合はステップS6へ移行する。
【0022】
ステップS6では、ステップS4での電池304以外のユニットからの入出力制限との判断、或いは、ステップS5での電池304からの入出力制限のうちSOCではなく、温度やシステム故障によるとの判断に続き、即時、入出力制限を適用し、リターンへ移行する。
ここで、ASCD制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、即時入出力制限が適用されると、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジントルク設定配分とモータトルク設定配分とが変更される。例えば、モータ強電系の入出力制限時には、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる(図7及び図8参照)。一方、エンジン系の入出力制限時には、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に減少させると共に、モータトルク設定配分を所定時間にて徐々に上昇させる(図9参照)。
【0023】
ステップS7では、ステップS5でのSOCによる制限との判断に続き、設定されているモータ303へのトルク配分を高めに変更すると共に、SOCの範囲を変更し、リターンへ移行する。
すなわち、バッテリ入出力制限値がバッテリ充電容量に起因して決められた場合、バッテリ入出力制限値がバッテリ温度に起因して決められた場合に比べ、駆動用モータ303へのトルク配分をより高めの設定とする。そして、駆動用モータ303へのトルク配分をより高めの設定とする場合、電池304の過放電に対してはSOC下限値を下げる設定とし、電池304の過充電に対してはSOC上限値を上げる設定とする。ちなみに、ハイブリッド車の場合、SOCの制御範囲は、中央値(例えば、60%)に対して±20%程度であり、過放電対応の場合はSOCが0%に至らないように、SOC下限値を若干下げて対応することが可能であり、過放電対応の場合はSOCが100%に至らないように、SOC上限値を若干上げて対応することが可能である。
例えば、モータ強電系のうち、SOCによる入出力制限時には、エンジントルク設定配分とモータトルク設定配分として入出力制限前の配分を、SOCの制御範囲を拡大することにより許容される所定時間だけそのまま維持し(駆動用モータ303へのトルク配分を高めの設定)、許容範囲を超えたら、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる(図6参照)。
【0024】
次に、作用を説明する。
[定速走行制御作用]
エンジンとモータを駆動源とするハイブリッド車の定速走行制御装置では、定速走行制御中の出力トルクの設定を、エンジンとモータとに適切に配分する必要がある。この定速走行制御中において、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合、例えば、モータへのトルク配分が高い走行状況でモータ強電系(バッテリ、モータ、発電機、インバータなど)に出力制限がかかると、設定される出力トルク上限値が低い値となる。
例えば、定速走行制御中にエンジンとモータとのトルク配分を50:50とした場合、モータの入出力制限されて10となった場合には、エンジンも10で与えられるというように、設定される出力トルク上限値が100から20へと低下する。
この出力トルク上限値の低下により、ASCDスイッチをONにしたままで、ドライバーとしては定速走行制御の継続を望んでいるにもかかわらず、坂道などの路面抵抗により車速を維持することができずに低下し、車速が一定以下となり、自動的に定速走行制御がキャンセルされる。このように、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合には、定速走行制御の適用状況が狭くなってしまう。
【0025】
これに対し、実施例1のハイブリッド車の定速走行制御装置では、ASCD制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することで、ASCD制御中、エンジン系やモータ強電系の入出力が制限されても、ASCD制御の適用を継続するようにした。
【0026】
すなわち、実施例1の定速走行制御装置では、ASCD制御中であって、電池304による制限を除くエンジン系とモータ強電系のいずれかからの入出力制限時、図2のフローチャートにおいて、ステップS1→ステップS3→ステップS4→ステップS6→リターンへと進む流れが繰り返される。そして、ステップS1において、ASCD制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値が、エンジントルク上限値に設定され、ステップS6において、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御が行われる。
例えば、ASCD制御中にエンジンとモータとのトルク配分を50:50とした場合、モータの入出力制限されて10となった場合であっても、エンジントルク分は確保されているため、設定される出力トルク上限値が100からエンジントルク分の50までの低下で抑えられ、出力トルク上限値をエンジントルク上限値に設定してASCD制御が継続されることになる。
したがって、ASCD制御中、エンジン系やモータ強電系の入出力が制限されても、ASCD制御の適用を継続することができる。しかも、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御が行われることで、車速変動やドライバーや乗員に対する違和感も小さく抑えられる。
【0027】
実施例1の定速走行制御装置では、ASCD制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定している。
したがって、アクセルOFF(足離し操作)した際に発生する制動力(エンジンブレーキ、回生制動トルク)は、キャンセル対象とはならないため、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定することで、不必要なキャンセル条件を回避することが可能となる。
【0028】
実施例1の定速走行制御装置では、入出力制限判断手段であるステップS4及びステップS5において、モータ強電系のうち電池304が入出力制限値を持つ時、バッテリ入出力制限値がSOC以外に起因して決められたか、SOCに起因して決められたかを判断し、入出力制限がSOCに起因する場合、図2のフローチャートにおいて、ステップS1→ステップS3→ステップS4→ステップS5→ステップS7→リターンへと進む流れが繰り返される。そして、ステップS7では、設定されているモータ303へのトルク配分が高めに変更される。さらに、モータ303へのトルク配分を高めに変更する場合、SOCの範囲も変更される。
すなわち、電池304の温度上昇は、充放電電流に依存し、応答性が低いため、シビアに制限する必要があるが、ハイブリッド車の場合、SOCの制御範囲は、中央値(例えば、60%)に対して±20%程度であり、過放電対応の場合はSOCが0%に至らないように、SOC下限値を若干下げて対応することが可能であり、過放電対応の場合はSOCが100%に至らないように、SOC上限値を若干上げて対応することが可能である。
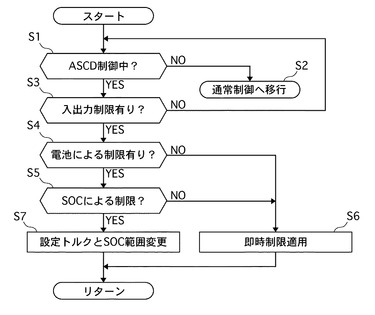
そこで、図3の出力制限値特性にて破線で示すように、電池304の過放電に対してはSOC下限値を下げる設定とし、図3の入力制限値特性にて破線で示すように、電池304の過充電に対してはSOC上限値を上げる設定とする。
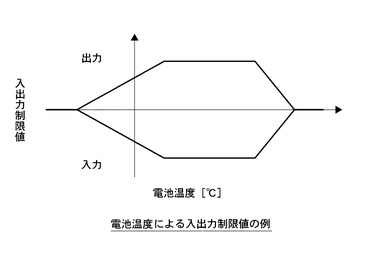
ちなみに、図4には電池温度による入出力制限値の例を示すが、電池304の温度変化は応答性が低く、寿命を含めマージンを考慮して設定されているため、ASCD制御を継続させるために入出力制限値を拡大することはない。
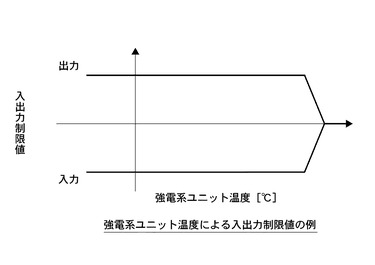
そして、図5には強電系ユニット温度による入出力制限値の例を示すが、電池304の温度変化と同様に、応答性が低く、寿命を含めマージンを考慮して設定されているため、ASCD制御を継続させるために入出力制限値を拡大することはない。
【0029】
[各入出力制限パターンでのASCD制御作用]
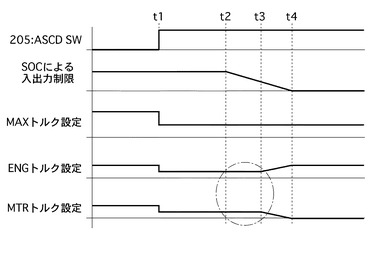
・SOCによる入出力制限時(図6)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にてSOCによる入出力制限が開始されると、SOCの制御範囲を拡大することにより許容される時刻t3までの所定時間だけ、エンジントルク設定配分とモータトルク設定配分として入出力制限前の配分がそのまま維持される。そして、時刻t3を超えたらエンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、SOCによる入出力制限に限っては、SOC上下限を拡大することにより、トルク配分調整開始を遅くしている。
【0030】
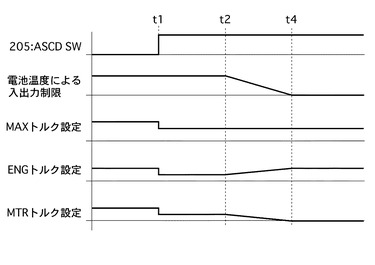
・電池温度による入出力制限時(図7)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にて電池温度による入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に上昇させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、電池温度による入出力制限時には、充放電電流に依存し、応答性が低いため、電池温度による入出力制限に入ると、直ちにトルク配分調整を開始している。
【0031】
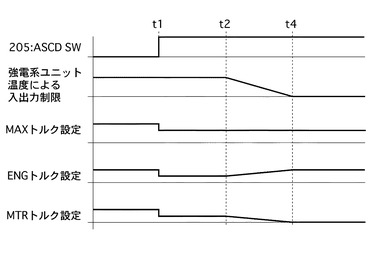
・強電系ユニット温度による入出力制限時(図8)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にて強電系ユニット温度による入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に上昇させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、強電系ユニットによる入出力制限の場合は、上記電池温度による入出力制限の場合の処理と同一としている。
【0032】
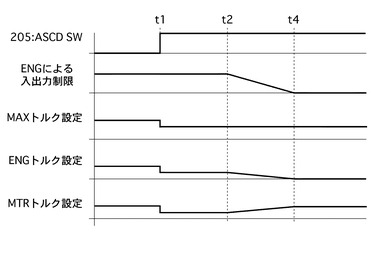
・エンジンによる入出力制限時(図9)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にてエンジンによる入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に減少させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に上昇させる。そして、時刻t4では、エンジン301へのトルク配分をゼロとし、駆動用モータ303のみにより出力トルク上限値が確保される。
すなわち、エンジン系異常時には、正常である駆動用モータ303のみによりトルクを発生させるようにしている。
【0033】
次に、効果を説明する。
実施例1のハイブリッド車の定速走行制御装置にあっては、下記に列挙する効果を得ることができる。
【0034】
(1) 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定するため、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができる。
【0035】
(2) 前記定速走行制御手段は、定速走行制御が開始されると、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定するため、アクセルOFFした際に発生する制動力(エンジンブレーキ、回生制動トルク)は、キャンセル対象とはならないことで、不必要なキャンセル条件を回避することができる。
【0036】
(3) エンジン系とモータ強電系の入出力制限の有無を判断する入出力制限判断手段(ステップS3)を設け、前記定速走行制御手段は、定速走行制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御を行うため、定速走行制御の途中でエンジン系とモータ強電系のいずれかからの入出力制限を受けても、滑らかな出力トルクが維持されることで、車速変動やドライバーや乗員に対する違和感を小さく抑えることができる。
【0037】
(4) 前記入出力制限判断手段は、モータ強電系のうち電池304が入出力制限値を持つ時、電池304の入出力制限値がSOC以外に起因して決められたか、SOCに起因して決められたかを判断し(ステップS4,5)、前記定速走行制御手段は、電池304の入出力制限値がSOCに起因して決められた場合、電池304の入出力制限値がSOC以外に起因して決められた場合に比べ、駆動用モータ303へのトルク配分をより高めの設定とするため、定速走行制御の途中でモータ強電系から入出力制限を受けた場合、電池304の温度上昇に対しては応答良くトルク配分調整の開始しながら、SOC制御範囲の逸脱に対してはトルク配分調整の開始を遅くすることができる。
【0038】
(5) 前記定速走行制御手段は、駆動用モータ303へのトルク配分をより高めの設定とする場合、電池304の過放電に対してはSOC下限値を下げる設定とし、電池304の過充電に対してはSOC上限値を上げる設定とするため、定速走行制御の途中でモータ強電系から入出力制限を受けた場合、SOC制御範囲の逸脱に対しSOC上下限値の拡大によりトルク配分調整の開始を遅くすることができる。
【0039】
以上、本発明のハイブリッド車の定速走行制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0040】
実施例1では、定速走行制御手段として、定速走行制御中に入出力制限が有る場合、SOCによる入出力制限時を例外として扱う好ましい例を示したが、例えば、入出力制限が有る場合、入出力制限対象にかかわらず、即時制限適用をしても良い。要するに、定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定するものであれば本発明に含まれる。
【産業上の利用可能性】
【0041】
実施例1では、前輪駆動もしくは後輪駆動の駆動源としてエンジンとモータを有するパラレル型のハイブリッド車への適用例を示したが、前輪もしくは後輪を主駆動輪とし、他方の輪を副駆動輪とするハイブリッド四輪駆動車にも適用できる。要するに、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車には適用することができる。
【図面の簡単な説明】
【0042】
【図1】ハイブリッド車に適用された実施例1の定速走行制御装置を示す全体システム図である。
【図2】実施例1のCPUにて実行される定速走行制御処理の流れを示すフローチャートである。
【図3】実施例1の定速走行制御処理にて用いられる電池SOCによる入出力制限値の一例を示す特性図である。
【図4】実施例1の定速走行制御処理にて用いられる電池温度による入出力制限値の一例を示す特性図である。
【図5】実施例1の定速走行制御処理にて用いられる強電ユニット温度による入出力制限値の一例を示す特性図である。
【図6】実施例1でのSOCによる入出力制限時におけるASCDスイッチ・SOCによる入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図7】実施例1での電池温度による入出力制限時におけるASCDスイッチ・電池温度による入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図8】実施例1での強電ユニット温度による入出力制限時におけるASCDスイッチ・強電ユニット温度による入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図9】実施例1でのエンジンによる入出力制限時におけるASCDスイッチ・エンジンによる入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【符号の説明】
【0043】
101 CPU
201 GPS
202 車速センサ
203 ブレーキセンサ
204 シフトセンサ
205 ASCDスイッチ
206 ギャップセンサ
207 モードスイッチ
301 エンジン
302 インバータ
303 駆動用モータ(モータ)
304 電池(バッテリ)
305 トランスミッション
【技術分野】
【0001】
本発明は、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置の技術分野に属する。
【背景技術】
【0002】
従来の定速走行制御装置(ASCD:Auto Speed Control Device)は、自車の車速が下限車速以上での走行中であって、かつ、ドライバーによりASCDスイッチの操作を行うと、原則的にスイッチ操作時の車速を維持するが、この定速走行制御中に前方車両等の障害物が検知された場合、自車と障害物との間隔や相対車速等を基に、車間一定制御を適用することで、安全性を確保するようにしている。そして、ドライバーが前方障害物等に気づき、停車(制動)しようとしても、車両発生トルクが大きく、停車不能とならないように、規定車速(=下限車速)以下では、定速走行制御に移行しないように設定されている(例えば、特許文献1参照)。
【特許文献1】特開平6−119599号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来の車両の定速走行制御装置を、エンジンとモータを駆動源とするハイブリッド車に適用する場合、定速走行制御中の出力トルクの設定を、エンジンとモータとに適切に配分する必要がある。この定速走行制御中において、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合、例えば、モータへのトルク配分が高い走行状況でモータ強電系(バッテリ、モータ、発電機、インバータなど)に出力制限がかかると、設定される出力トルク上限値が低い値となり、ASCDスイッチをONにしたままでドライバーとしては定速走行制御の継続を望んでいるにもかかわらず、車速が一定以下となり、定速走行制御がキャンセルされる。この結果、定速走行制御の適用状況が狭くなってしまう、という問題があった。
【0004】
本発明は、上記問題に着目してなされたもので、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができるハイブリッド車の定速走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明では、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することを特徴とする。
【発明の効果】
【0006】
よって、本発明のハイブリッド車の定速走行制御装置にあっては、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値が、エンジントルク上限値に設定される。例えば、モータ強電系の入出力が定速走行制御中に制限されても、エンジントルク分は確保されているため、出力トルク上限値をエンジントルク上限値に設定することで、入出力制限後も車速の低下が抑えられ、定速走行制御をそのまま継続することが可能となる。この結果、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明のハイブリッド車の定速走行制御装置を実施するための最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0008】
まず、構成を説明する。
図1は左右前輪若しくは左右後輪をエンジンとモータとで駆動するハイブリッド車に適用された実施例1の定速走行制御装置を示す全体システム図である。
実施例1の定速走行制御装置は、図1に示すように、CPU101と、GPS201と、車速センサ202と、ブレーキセンサ203と、シフトセンサ204と、ASCDスイッチ205と、ギャップセンサ206と、モードスイッチ207と、エンジン301と、インバータ302と、駆動用モータ303(モータ)と、電池304(バッテリ)と、トランスミッション305と、を備えている。
【0009】
前記CPU101は、ASCD制御時、原則的に、車速センサ202からの車速検出値が下限車速以上であり、且つ、ASCDスイッチ205の入力値がONである場合、ASCDスイッチON時の車速を維持するように、シフトセンサ204の検出値を参照し、エンジン301及び駆動用モータ303のそれぞれへ出力トルク指令を送信し、トランスミッション305を介して駆動輪へとトルク出力させている。
その際、CPU101は、エンジン301、インバータ302、駆動用モータ303、電池304、トランスミッション305の状態をモニタし、温度上昇などの異常発生時や、電池SOC低下時には、当該ASCD制御ユニットの使用を制限するなども行っている。
なお、下記の3つの条件の何れかが成立した場合、
・車速センサ202からの検出値が一定値以下となった場合
・ブレーキセンサ203がON(ブレーキON)となった場合
・ASCDスイッチ205がOFF(ASCD機能OFF)となった場合
ASCD機能はキャンセルされる。
本提案システムでは、ASCD制御適用時のトルク上限値を、エンジン301の上限トルクとし、強電系システム故障時でもASCD制御を適用できることを狙っている。また、強電系システムに関して設定されている入出力制限に応じて、各ユニットに対してトルク配分を行う。
以下、システムを構成する各ユニットについて説明する。
【0010】
前記GPS201は、自車周辺の地形情報を収集し、その情報をCPU101へ送信する。前記車速センサ202は、自車速度を検出し、その情報をCPU101へ送信する。
前記ブレーキセンサ203は、ドライバーが制動指令としてブレーキペダルを踏んだことを検出し、その情報をCPU101へ送信する。
前記シフトセンサ204は、ドライバーが設定したシフトポジション情報を検出し、その情報をCPU101へ送信する。
前記ASCDスイッチ205は、ドライバーがASCD機能を適用/キャンセル指令する際に使用するスイッチであり、スイッチ信号をCPU101へ送信する。
前記ギャップセンサ206は、前方車両などの被移動体を含む障害物と自車との相対距離を検出し、その情報をCPU101へ送信する。
前記モードスイッチ207は、ドライバーがエンジン排気音質を任意に選択できるスイッチである。例えば、「サイレントモード」と「スポーティモード」の何れかを選択できるものとする。
【0011】
前記エンジン301は、CPU101からのトルク指令に応じてトランスミッション305を介して駆動輪(左右前輪または左右後輪)へとトルクを出力する。
【0012】
前記インバータ302は、CPU101からのトルク指令に応じて駆動用モータ303へとトルク出力させるよう、電池304から電気エネルギー(直流)を電気エネルギー(交流)へと変換し、供給する。駆動用モータ303が回生制動する際は、回生により発生する電気エネルギー(交流)を電池304へと戻す(充電する)よう、電気エネルギー(交流)を電気エネルギー(直流)へと変換する。
【0013】
前記駆動用モータ303は、インバータ302から供給された電気エネルギー(交流)に応じてトランスミッション305を介して駆動輪へとトルクを出力する。また、回生制動時は駆動輪の回生制動エネルギーをトランスミッション305を介して受け、これを電気エネルギー(交流)へと変換し、インバータ302を介して電池304へと電気エネルギー(直流)を戻す。
【0014】
前記電池304は、インバータ302がCPU101より受信した駆動用モータ303へのトルク指令に応じ、インバータ302へと電気エネルギー(直流)を供給する。また、回生制動時はインバータ302より電気エネルギー(直流)を受ける。
【0015】
前記トランスミッション305は、エンジン301及び駆動用モータ303の発生トルクを受け、これを駆動輪へと供給する。
【0016】
図2は実施例1のCPU101にて実行される定速走行制御処理の流れを示すフローチャートで、以下、各ステップについて説明する(定速走行制御手段)。
【0017】
ステップS1では、ASCD制御中、つまり、ASCDスイッチ205がONとなっているか否かを判断し、Yesの場合はステップS3へ移行し、Noの場合はステップS2へ移行する。
ここで、ASCDスイッチ205をONとすることでASCD制御に入ると、出力トルク上限値が、モータ強電系の入出力制限値を無視し、エンジントルク上限値に設定され、また、制動トルク上限値が、エンジンブレーキと回生制動トルクとを加味した値に設定される。そして、出力トルク設定として、エンジン301と駆動用モータ303とに適切に配分(例えば、50:50)される。
【0018】
ステップS2では、ステップS1でのASCD非制御中であるとの判断に続き、通常制御を実行する。なお、ASCD制御中においてASCD制御キャンセル条件が成立した場合には、ASCD制御から通常制御へと移行する。
【0019】
ステップS3では、ステップS1でのASCD制御中であるとの判断に続き、搭載ユニット(エンジン301、インバータ302、駆動用モータ303、電池304、トランスミッション305)のいずれかから入出力制限が設定されているか否かを確認し、Yesの場合はステップS4へ移行し、Noの場合はステップS1へ戻る(入出力制限判断手段)。
なお、エンジン301とトランスミッション305とはエンジン系を構成し、インバータ302と駆動用モータ303と電池304とはモータ強電系を構成する。
【0020】
ステップS4では、ステップS3での搭載ユニットのいずれかから入出力制限有りの判断に続き、電池304による入出力制限が有るか否かを判断し、Yesの場合はステップS5へ移行し、Noの場合はステップS6へ移行する。
【0021】
ステップS5では、ステップS4での電池304による入出力制限有りとの判断に続き、SOC(State Of Charge:バッテリ充電容量)による入出力制限であるか否かを判断し、Yesの場合はステップS7へ移行し、Noの場合はステップS6へ移行する。
【0022】
ステップS6では、ステップS4での電池304以外のユニットからの入出力制限との判断、或いは、ステップS5での電池304からの入出力制限のうちSOCではなく、温度やシステム故障によるとの判断に続き、即時、入出力制限を適用し、リターンへ移行する。
ここで、ASCD制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、即時入出力制限が適用されると、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジントルク設定配分とモータトルク設定配分とが変更される。例えば、モータ強電系の入出力制限時には、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる(図7及び図8参照)。一方、エンジン系の入出力制限時には、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に減少させると共に、モータトルク設定配分を所定時間にて徐々に上昇させる(図9参照)。
【0023】
ステップS7では、ステップS5でのSOCによる制限との判断に続き、設定されているモータ303へのトルク配分を高めに変更すると共に、SOCの範囲を変更し、リターンへ移行する。
すなわち、バッテリ入出力制限値がバッテリ充電容量に起因して決められた場合、バッテリ入出力制限値がバッテリ温度に起因して決められた場合に比べ、駆動用モータ303へのトルク配分をより高めの設定とする。そして、駆動用モータ303へのトルク配分をより高めの設定とする場合、電池304の過放電に対してはSOC下限値を下げる設定とし、電池304の過充電に対してはSOC上限値を上げる設定とする。ちなみに、ハイブリッド車の場合、SOCの制御範囲は、中央値(例えば、60%)に対して±20%程度であり、過放電対応の場合はSOCが0%に至らないように、SOC下限値を若干下げて対応することが可能であり、過放電対応の場合はSOCが100%に至らないように、SOC上限値を若干上げて対応することが可能である。
例えば、モータ強電系のうち、SOCによる入出力制限時には、エンジントルク設定配分とモータトルク設定配分として入出力制限前の配分を、SOCの制御範囲を拡大することにより許容される所定時間だけそのまま維持し(駆動用モータ303へのトルク配分を高めの設定)、許容範囲を超えたら、出力トルク上限値を維持したまま、エンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる(図6参照)。
【0024】
次に、作用を説明する。
[定速走行制御作用]
エンジンとモータを駆動源とするハイブリッド車の定速走行制御装置では、定速走行制御中の出力トルクの設定を、エンジンとモータとに適切に配分する必要がある。この定速走行制御中において、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合、例えば、モータへのトルク配分が高い走行状況でモータ強電系(バッテリ、モータ、発電機、インバータなど)に出力制限がかかると、設定される出力トルク上限値が低い値となる。
例えば、定速走行制御中にエンジンとモータとのトルク配分を50:50とした場合、モータの入出力制限されて10となった場合には、エンジンも10で与えられるというように、設定される出力トルク上限値が100から20へと低下する。
この出力トルク上限値の低下により、ASCDスイッチをONにしたままで、ドライバーとしては定速走行制御の継続を望んでいるにもかかわらず、坂道などの路面抵抗により車速を維持することができずに低下し、車速が一定以下となり、自動的に定速走行制御がキャンセルされる。このように、出力トルク上限値を、エンジンとモータとのトルク配分に応じて設定するようにした場合には、定速走行制御の適用状況が狭くなってしまう。
【0025】
これに対し、実施例1のハイブリッド車の定速走行制御装置では、ASCD制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することで、ASCD制御中、エンジン系やモータ強電系の入出力が制限されても、ASCD制御の適用を継続するようにした。
【0026】
すなわち、実施例1の定速走行制御装置では、ASCD制御中であって、電池304による制限を除くエンジン系とモータ強電系のいずれかからの入出力制限時、図2のフローチャートにおいて、ステップS1→ステップS3→ステップS4→ステップS6→リターンへと進む流れが繰り返される。そして、ステップS1において、ASCD制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値が、エンジントルク上限値に設定され、ステップS6において、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御が行われる。
例えば、ASCD制御中にエンジンとモータとのトルク配分を50:50とした場合、モータの入出力制限されて10となった場合であっても、エンジントルク分は確保されているため、設定される出力トルク上限値が100からエンジントルク分の50までの低下で抑えられ、出力トルク上限値をエンジントルク上限値に設定してASCD制御が継続されることになる。
したがって、ASCD制御中、エンジン系やモータ強電系の入出力が制限されても、ASCD制御の適用を継続することができる。しかも、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御が行われることで、車速変動やドライバーや乗員に対する違和感も小さく抑えられる。
【0027】
実施例1の定速走行制御装置では、ASCD制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定している。
したがって、アクセルOFF(足離し操作)した際に発生する制動力(エンジンブレーキ、回生制動トルク)は、キャンセル対象とはならないため、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定することで、不必要なキャンセル条件を回避することが可能となる。
【0028】
実施例1の定速走行制御装置では、入出力制限判断手段であるステップS4及びステップS5において、モータ強電系のうち電池304が入出力制限値を持つ時、バッテリ入出力制限値がSOC以外に起因して決められたか、SOCに起因して決められたかを判断し、入出力制限がSOCに起因する場合、図2のフローチャートにおいて、ステップS1→ステップS3→ステップS4→ステップS5→ステップS7→リターンへと進む流れが繰り返される。そして、ステップS7では、設定されているモータ303へのトルク配分が高めに変更される。さらに、モータ303へのトルク配分を高めに変更する場合、SOCの範囲も変更される。
すなわち、電池304の温度上昇は、充放電電流に依存し、応答性が低いため、シビアに制限する必要があるが、ハイブリッド車の場合、SOCの制御範囲は、中央値(例えば、60%)に対して±20%程度であり、過放電対応の場合はSOCが0%に至らないように、SOC下限値を若干下げて対応することが可能であり、過放電対応の場合はSOCが100%に至らないように、SOC上限値を若干上げて対応することが可能である。
そこで、図3の出力制限値特性にて破線で示すように、電池304の過放電に対してはSOC下限値を下げる設定とし、図3の入力制限値特性にて破線で示すように、電池304の過充電に対してはSOC上限値を上げる設定とする。
ちなみに、図4には電池温度による入出力制限値の例を示すが、電池304の温度変化は応答性が低く、寿命を含めマージンを考慮して設定されているため、ASCD制御を継続させるために入出力制限値を拡大することはない。
そして、図5には強電系ユニット温度による入出力制限値の例を示すが、電池304の温度変化と同様に、応答性が低く、寿命を含めマージンを考慮して設定されているため、ASCD制御を継続させるために入出力制限値を拡大することはない。
【0029】
[各入出力制限パターンでのASCD制御作用]
・SOCによる入出力制限時(図6)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にてSOCによる入出力制限が開始されると、SOCの制御範囲を拡大することにより許容される時刻t3までの所定時間だけ、エンジントルク設定配分とモータトルク設定配分として入出力制限前の配分がそのまま維持される。そして、時刻t3を超えたらエンジントルク設定配分を所定時間にて徐々に上昇させると共に、モータトルク設定配分を所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、SOCによる入出力制限に限っては、SOC上下限を拡大することにより、トルク配分調整開始を遅くしている。
【0030】
・電池温度による入出力制限時(図7)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にて電池温度による入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に上昇させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、電池温度による入出力制限時には、充放電電流に依存し、応答性が低いため、電池温度による入出力制限に入ると、直ちにトルク配分調整を開始している。
【0031】
・強電系ユニット温度による入出力制限時(図8)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にて強電系ユニット温度による入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に上昇させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に減少させる。そして、時刻t4では、駆動用モータ303へのトルク配分をゼロとし、エンジン301のみにより出力トルク上限値が確保される。
すなわち、強電系ユニットによる入出力制限の場合は、上記電池温度による入出力制限の場合の処理と同一としている。
【0032】
・エンジンによる入出力制限時(図9)
時刻t1にてASCDスイッチ205をONとすると、出力トルク上限値(MAXトルク設定)がエンジントルク上限値に設定され、出力トルク上限値が、エンジントルク設定配分(ENGトルク設定)とモータトルク設定配分(MTRトルク設定)とに分けられ、SOCによる入出力が制限される時刻t2まではこの状態が維持される。
そして、時刻t2にてエンジンによる入出力制限が開始されると、エンジントルク設定配分を時刻t4までの所定時間にて徐々に減少させると共に、モータトルク設定配分を時刻t4までの所定時間にて徐々に上昇させる。そして、時刻t4では、エンジン301へのトルク配分をゼロとし、駆動用モータ303のみにより出力トルク上限値が確保される。
すなわち、エンジン系異常時には、正常である駆動用モータ303のみによりトルクを発生させるようにしている。
【0033】
次に、効果を説明する。
実施例1のハイブリッド車の定速走行制御装置にあっては、下記に列挙する効果を得ることができる。
【0034】
(1) 駆動源としてエンジン301と駆動用モータ303を有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定するため、定速走行制御中、エンジン系やモータ強電系の入出力が制限されても、定速走行制御の適用を継続することができる。
【0035】
(2) 前記定速走行制御手段は、定速走行制御が開始されると、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定するため、アクセルOFFした際に発生する制動力(エンジンブレーキ、回生制動トルク)は、キャンセル対象とはならないことで、不必要なキャンセル条件を回避することができる。
【0036】
(3) エンジン系とモータ強電系の入出力制限の有無を判断する入出力制限判断手段(ステップS3)を設け、前記定速走行制御手段は、定速走行制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジン301と駆動用モータ303のうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御を行うため、定速走行制御の途中でエンジン系とモータ強電系のいずれかからの入出力制限を受けても、滑らかな出力トルクが維持されることで、車速変動やドライバーや乗員に対する違和感を小さく抑えることができる。
【0037】
(4) 前記入出力制限判断手段は、モータ強電系のうち電池304が入出力制限値を持つ時、電池304の入出力制限値がSOC以外に起因して決められたか、SOCに起因して決められたかを判断し(ステップS4,5)、前記定速走行制御手段は、電池304の入出力制限値がSOCに起因して決められた場合、電池304の入出力制限値がSOC以外に起因して決められた場合に比べ、駆動用モータ303へのトルク配分をより高めの設定とするため、定速走行制御の途中でモータ強電系から入出力制限を受けた場合、電池304の温度上昇に対しては応答良くトルク配分調整の開始しながら、SOC制御範囲の逸脱に対してはトルク配分調整の開始を遅くすることができる。
【0038】
(5) 前記定速走行制御手段は、駆動用モータ303へのトルク配分をより高めの設定とする場合、電池304の過放電に対してはSOC下限値を下げる設定とし、電池304の過充電に対してはSOC上限値を上げる設定とするため、定速走行制御の途中でモータ強電系から入出力制限を受けた場合、SOC制御範囲の逸脱に対しSOC上下限値の拡大によりトルク配分調整の開始を遅くすることができる。
【0039】
以上、本発明のハイブリッド車の定速走行制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0040】
実施例1では、定速走行制御手段として、定速走行制御中に入出力制限が有る場合、SOCによる入出力制限時を例外として扱う好ましい例を示したが、例えば、入出力制限が有る場合、入出力制限対象にかかわらず、即時制限適用をしても良い。要するに、定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定するものであれば本発明に含まれる。
【産業上の利用可能性】
【0041】
実施例1では、前輪駆動もしくは後輪駆動の駆動源としてエンジンとモータを有するパラレル型のハイブリッド車への適用例を示したが、前輪もしくは後輪を主駆動輪とし、他方の輪を副駆動輪とするハイブリッド四輪駆動車にも適用できる。要するに、駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車には適用することができる。
【図面の簡単な説明】
【0042】
【図1】ハイブリッド車に適用された実施例1の定速走行制御装置を示す全体システム図である。
【図2】実施例1のCPUにて実行される定速走行制御処理の流れを示すフローチャートである。
【図3】実施例1の定速走行制御処理にて用いられる電池SOCによる入出力制限値の一例を示す特性図である。
【図4】実施例1の定速走行制御処理にて用いられる電池温度による入出力制限値の一例を示す特性図である。
【図5】実施例1の定速走行制御処理にて用いられる強電ユニット温度による入出力制限値の一例を示す特性図である。
【図6】実施例1でのSOCによる入出力制限時におけるASCDスイッチ・SOCによる入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図7】実施例1での電池温度による入出力制限時におけるASCDスイッチ・電池温度による入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図8】実施例1での強電ユニット温度による入出力制限時におけるASCDスイッチ・強電ユニット温度による入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【図9】実施例1でのエンジンによる入出力制限時におけるASCDスイッチ・エンジンによる入出力制限・MAXトルク設定・ENGトルク設定・MTRトルク設定の各特性を示すタイムチャートである。
【符号の説明】
【0043】
101 CPU
201 GPS
202 車速センサ
203 ブレーキセンサ
204 シフトセンサ
205 ASCDスイッチ
206 ギャップセンサ
207 モードスイッチ
301 エンジン
302 インバータ
303 駆動用モータ(モータ)
304 電池(バッテリ)
305 トランスミッション
【特許請求の範囲】
【請求項1】
駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することを特徴とするハイブリッド車の定速走行制御装置。
【請求項2】
請求項1に記載されたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定することを特徴とするハイブリッド車の定速走行制御装置。
【請求項3】
請求項1または2に記載されたハイブリッド車の定速走行制御装置において、
エンジン系とモータ強電系の入出力制限の有無を判断する入出力制限判断手段を設け、
前記定速走行制御手段は、定速走行制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジンとモータのうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御を行うことを特徴とするハイブリッド車の定速走行制御装置。
【請求項4】
請求項1乃至3の何れか1項に記載されたハイブリッド車の定速走行制御装置において、
前記入出力制限判断手段は、モータ強電系のうちバッテリが入出力制限値を持つ時、バッテリ入出力制限値がバッテリ充電容量以外に起因して決められたか、バッテリ充電容量に起因して決められたかを判断し、
前記定速走行制御手段は、バッテリ入出力制限値がバッテリ充電容量に起因して決められた場合、バッテリ入出力制限値がバッテリ充電容量以外に起因して決められた場合に比べ、モータへのトルク配分をより高めの設定とすることを特徴とするハイブリッド車の定速走行制御装置。
【請求項5】
請求項4に記載されたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、モータへのトルク配分をより高めの設定とする場合、バッテリの過放電に対しては充電容量下限値を下げる設定とし、バッテリの過充電に対しては充電容量上限値を上げる設定とすることを特徴とするハイブリッド車の定速走行制御装置。
【請求項1】
駆動源としてエンジンとモータを有し、ドライバーにより設定された車速を維持するように出力トルクや制動トルクを制御しながら走行する定速走行制御手段を備えたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、モータ強電系の入出力制限値を無視し、出力トルク上限値を、エンジントルク上限値に設定することを特徴とするハイブリッド車の定速走行制御装置。
【請求項2】
請求項1に記載されたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、定速走行制御が開始されると、制動トルク上限値を、エンジンブレーキと回生制動トルクとを加味した値に設定することを特徴とするハイブリッド車の定速走行制御装置。
【請求項3】
請求項1または2に記載されたハイブリッド車の定速走行制御装置において、
エンジン系とモータ強電系の入出力制限の有無を判断する入出力制限判断手段を設け、
前記定速走行制御手段は、定速走行制御中であって、エンジン系とモータ強電系のいずれかからの入出力制限時、エンジントルク上限値に設定した出力トルク上限値を維持したまま、エンジンとモータのうち、入出力制限が無い系側のトルク設定配分を徐々に増し、入出力制限が有る系側のトルク設定配分を徐々に減少させる制限適用制御を行うことを特徴とするハイブリッド車の定速走行制御装置。
【請求項4】
請求項1乃至3の何れか1項に記載されたハイブリッド車の定速走行制御装置において、
前記入出力制限判断手段は、モータ強電系のうちバッテリが入出力制限値を持つ時、バッテリ入出力制限値がバッテリ充電容量以外に起因して決められたか、バッテリ充電容量に起因して決められたかを判断し、
前記定速走行制御手段は、バッテリ入出力制限値がバッテリ充電容量に起因して決められた場合、バッテリ入出力制限値がバッテリ充電容量以外に起因して決められた場合に比べ、モータへのトルク配分をより高めの設定とすることを特徴とするハイブリッド車の定速走行制御装置。
【請求項5】
請求項4に記載されたハイブリッド車の定速走行制御装置において、
前記定速走行制御手段は、モータへのトルク配分をより高めの設定とする場合、バッテリの過放電に対しては充電容量下限値を下げる設定とし、バッテリの過充電に対しては充電容量上限値を上げる設定とすることを特徴とするハイブリッド車の定速走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−55357(P2007−55357A)
【公開日】平成19年3月8日(2007.3.8)
【国際特許分類】
【出願番号】特願2005−241164(P2005−241164)
【出願日】平成17年8月23日(2005.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年3月8日(2007.3.8)
【国際特許分類】
【出願日】平成17年8月23日(2005.8.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]