
ハイブリッド車両およびその制御方法
【課題】排気再循環装置を有する内燃機関の燃費をより向上させ、ひいては当該内燃機関を備えたハイブリッド車両におけるエネルギ効率をより向上させる。
【解決手段】ハイブリッド自動車に搭載されたEGR装置を有するエンジンに対する要求パワーは、走行に要求される要求走行パワーとバッテリの充放電要求パワーPb*とに基づいて設定され、バッテリの充電が要求されると共にEGR装置により排気再循環が実行されるときには、バッテリの充電が要求されると共に排気再循環が実行されないときに比べて要求パワーが増加するように充放電要求パワーPb*が充電側に増加させられる。
【解決手段】ハイブリッド自動車に搭載されたEGR装置を有するエンジンに対する要求パワーは、走行に要求される要求走行パワーとバッテリの充放電要求パワーPb*とに基づいて設定され、バッテリの充電が要求されると共にEGR装置により排気再循環が実行されるときには、バッテリの充電が要求されると共に排気再循環が実行されないときに比べて要求パワーが増加するように充放電要求パワーPb*が充電側に増加させられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、排気再循環装置を有する内燃機関と、当該内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、当該電動機と電力をやり取り可能な蓄電装置とを備えたハイブリッド車両およびその制御方法に関する。
【背景技術】
【0002】
従来、この種のハイブリッド車両として、排気再循環(EGR)の非実行時には内燃機関に要求される要求パワーと排気再循環なしに内燃機関が効率よく運転されるように予め定められた第1の動作ラインとを用いて当該内燃機関の運転ポイント(目標回転数および目標トルク)を設定すると共に、排気再循環の実行時には上記要求パワーと排気再循環を伴って内燃機関が効率よく運転されるように予め定められた第2の動作ラインとを用いて当該内燃機関の運転ポイントを設定するものが知られている(例えば、特許文献1参照)。このハイブリッド車両では、排気再循環の実行時における内燃機関の運転ポイントが同一の要求パワーに対応した排気再循環の非実行時における運転ポイントに比べて高回転側かつ低トルク側に移動するように第1および第2の動作ラインが定められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−076505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の排気再循環は、NOxの低減を図ると共に内燃機関の燃費を向上させるために採用されるものである。しかしながら、上記従来のハイブリッド車両のように排気再循環の非実行時と実行時とで異なる動作ラインを用いて、同一の要求パワーに対する内燃機関の運転ポイントを排気再循環の非実行時と実行時とで変更しても、排気再循環の実行時における燃費がさほど改善されないことがある。
【0005】
そこで、本発明は、排気再循環装置を有する内燃機関を備えたハイブリッド車両において、当該内燃機関の燃費をより向上させ、ひいては当該ハイブリッド車両におけるエネルギ効率をより向上させることを主目的とする。
【課題を解決するための手段】
【0006】
本発明によるハイブリッド車両およびその制御方法は、上記主目的を達成するために以下の手段を採っている。
【0007】
本発明によるハイブリッド車両は、
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とする。
【0008】
本発明者らが排気再循環装置を有する内燃機関について鋭意研究を行った結果、内燃機関の効率(燃料消費率)が最も良くなるときに当該内燃機関から出力されるパワーは、排気再循環の非実行時に比べて排気再循環の実行時に高くなり、特に排気再循環量が多い程このような傾向が強まることが判明した。このような研究結果を踏まえて、本発明のハイブリッド車両では、排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する内燃機関の出力パワーが排気再循環が実行されないときに比べて増加させられる。これにより、排気再循環装置を有する内燃機関の燃費をより向上させ、ひいては当該内燃機関を備えたハイブリッド車両におけるエネルギ効率をより向上させることが可能となる。なお、排気再循環の実行時に内燃機関の出力パワーを排気再循環の非実行時に比べて増加させることにより生じる内燃機関の出力パワーの増加分は、電動機を発電機として駆動するのに利用可能であり、当該電動機により発電された電力は蓄電装置の充電等に供することができる。
【0009】
また、前記排気再循環装置により排気再循環が実行されるときに、前記内燃機関に出力させるパワーの指令値である要求パワーを該排気再循環が実行されないときに比べて増加させてもよい。これにより、排気再循環が実行されるときに、同一の駆動力要求量に対する内燃機関の出力パワーを排気再循環が実行されないときに比べて増加させることが可能となる。
【0010】
更に、前記要求パワーは、少なくとも前記ハイブリッド車両の走行に要求される要求走行パワーと前記蓄電装置の目標充放電電力とに基づいて設定されてもよく、前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されるときには、該蓄電装置の充電が要求されると共に該排気再循環が実行されないときに比べて前記目標充放電電力を充電側に増加させてもよい。これにより、必要以上に要求パワーを増加させることで却って内燃機関の燃費を悪化させないようしながら、排気再循環装置により排気再循環が実行されるときに要求パワーを排気再循環が実行されないときに比べてより増加させることが可能となる。
【0011】
また、前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されないときには、前記目標充放電電力が第1の充電電力に設定されると共に、該蓄電装置の充電が要求されると共に該排気再循環が実行されるときには、前記目標充放電電力が前記第1の充電電力よりも充電電力として大きい第2の充電電力に設定されてもよく、前記第1の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行されない状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行されない状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められてもよく、前記第2の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行される状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行される状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められてもよい。これにより、蓄電装置の充電が要求されているときに、排気再循環の有無に拘わらず、内燃機関から実際に出力されるパワーを当該内燃機関の効率が最も良くなるときに内燃機関から出力されるパワーに近づけることができるので、当該内燃機関の燃費をより向上させることが可能となる。
【0012】
更に、前記ハイブリッド車両は、前記電動機の回転軸に接続される第1要素と、駆動輪に連結される駆動軸に接続される第2要素と、前記内燃機関の出力軸に接続される第3要素とを有する遊星歯車機構と、前記第2要素に連結される第2の電動機とを備えるものであってもよい。
【0013】
また、前記ハイブリッド車両は、前記電動機とは異なる第2の電動機の回転軸に接続される第1要素と、前記電動機の回転軸および前記内燃機関の出力軸に接続される第2要素と、駆動輪に連結される駆動軸に接続される第3要素とを有する遊星歯車機構を備えるものであってもよい。
【0014】
また、前記ハイブリッド車両において、前記電動機の回転軸の一端は、前記内燃機関の出力軸に接続されてもよく、当該ハイブリッド車両は、前記電動機の前記回転軸の他端に接続される入力軸と、駆動輪に連結される出力軸とを有する無段変速機を備えるものであってもよい。
【0015】
本発明によるハイブリッド車両の制御方法は、
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両の制御方法において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とする。
【0016】
この方法によれば、排気再循環装置を有する内燃機関の燃費をより向上させ、ひいては当該内燃機関を備えたハイブリッド車両におけるエネルギ効率をより向上させることが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施例に係るハイブリッド車両であるハイブリッド自動車20の概略構成図である。
【図2】エンジン22の概略構成図である。
【図3】実施例のハイブリッドECU70により実行されるエンジン運転時駆動制御ルーチンの一例を示すフローチャートである。
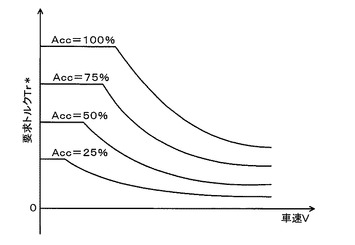
【図4】要求トルク設定用マップの一例を示す説明図である。
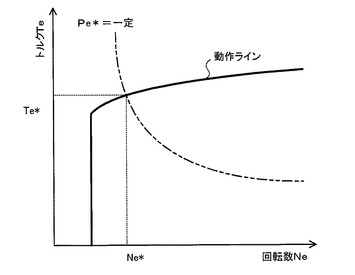
【図5】エンジン22の動作ラインの一例を示す説明図である。
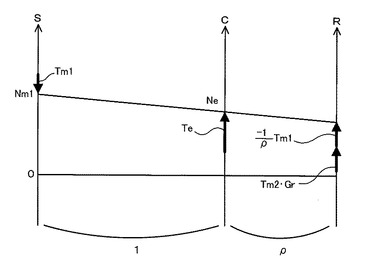
【図6】ハイブリッド自動車20が走行するときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
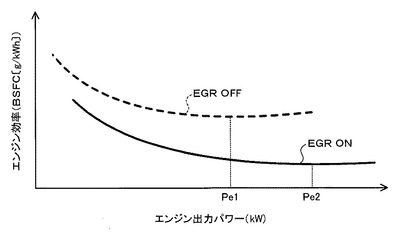
【図7】排気再循環の非実行時および実行時におけるエンジン22の出力パワーとエンジン22の正味燃料消費率との関係を例示する説明図である。
【図8】実施例のバッテリECU52により実行される充放電要求パワー設定ルーチンの一例を示すフローチャートである。
【図9】充放電要求パワー設定用マップの一例を示す説明図である。
【図10】変形例に係るハイブリッド自動車20Bの概略構成図である。
【発明を実施するための形態】
【0018】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0019】
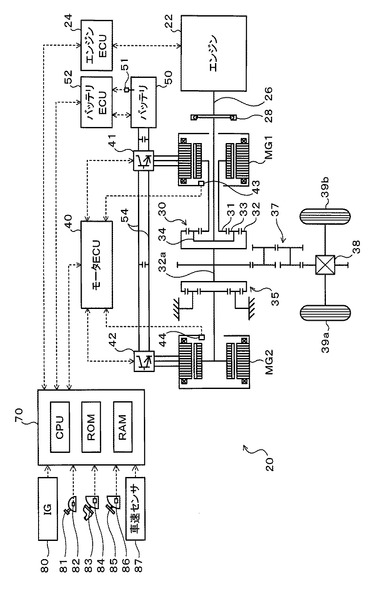
図1は、本発明の実施例に係るハイブリッド車両であるハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、ガソリンや軽油といった炭化水素系の燃料を用いて動力を出力するエンジン(内燃機関)22と、エンジン22を制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、サンギヤ(第1要素)31、駆動軸としてのリングギヤ軸32aに接続されたリングギヤ(第2要素)32、および複数のピニオンギヤ33を支持すると共にダンパ28を介してエンジン22のクランクシャフト(出力軸)26に接続されたプラネタリキャリア(第3要素)34を有するシングルピニオン式のプラネタリギヤ30と、プラネタリギヤ30のサンギヤ31に接続されると共に主として発電機として作動するモータMG1と、減速ギヤ機構35およびリングギヤ軸32aを介してリングギヤ32に接続されたモータMG2と、リングギヤ軸32aにギヤ機構37やデファレンシャルギヤ38を介して連結された駆動輪39a,39bと、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42に接続されたリチウムイオン二次電池あるいはニッケル水素二次電池であるバッテリ50と、インバータ41,42を介してモータMG1およびMG2を駆動制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)52と、エンジンECU24やモータECU40、バッテリECU52等と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを備える。
【0020】
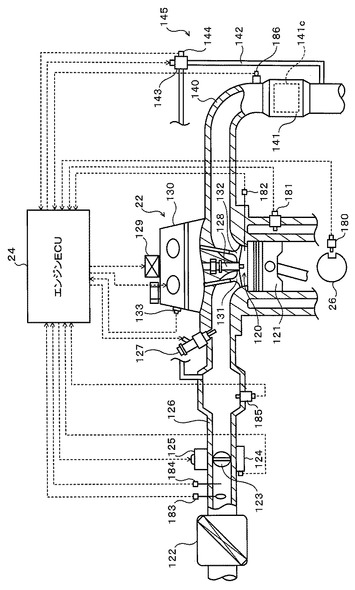
エンジン22は、ガソリンや軽油といった炭化水素系の燃料と空気との混合気を燃焼室120内で爆発燃焼させ、混合気の爆発燃焼に伴うピストン121の往復運動をクランクシャフト26の回転運動へと変換することにより動力を出力する内燃機関として構成されている。このエンジン22では、図2からわかるように、エアクリーナ122により清浄された空気がスロットルバルブ123を介して吸気管126内に取り入れられ、吸入空気には燃料噴射弁127からガソリン等の燃料が噴射される。こうして得られる空気と燃料との混合気は、可変バルブタイミング機能を有する動弁機構130により駆動される吸気バルブ131を介して燃焼室120に吸入されると共に点火プラグ128からの電気火花によって爆発燃焼させられる。エンジン22からの排ガスは、排気バルブ132や排気マニホールド140を介して一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)といった有害成分を浄化する排ガス浄化触媒(三元触媒)141cを含む浄化装置141へと送出され、浄化装置141にて浄化された後、外部へと排出される。
【0021】
このように構成されるエンジン22を制御するエンジンECU24は、図示しないCPUを中心とするマイクロコンピュータとして構成されている。エンジンECU24には、エンジン22に対して設けられて当該エンジン22の運転状態を検出する各種センサからの信号が入力される。例えば、エンジンECU24には、クランクシャフト26の回転位置を検出するクランクポジションセンサ180からのクランクポジションやエンジン22の冷却水の温度を検出する水温センサ181からの冷却水温Tw、燃焼室120内の圧力を検出する筒内圧センサ182からの筒内圧力、吸気バルブ131や排気バルブ132を駆動する動弁機構130に含まれるカムシャフトの回転位置を検出するカムポジションセンサ133からのカムポジション、スロットルバルブ123の位置を検出するスロットルバルブポジションセンサ124からのスロットルポジション、エンジン22の負荷としての吸入空気量を検出するエアフローメータ183からの吸入空気量Q、吸気管126に取り付けられた吸気温度センサ184からの吸気温度Tair、吸気管126内の圧力(負圧)を検出する吸気圧センサ185からの吸気負圧Pi、排気マニホールド140の浄化装置141の上流側に配置された空燃比センサ186からの空燃比AF等が図示しない入力ポートを介して入力される。
【0022】
そして、エンジンECU24は、エンジン22を作動させるための様々な制御信号を図示しない出力ポートを介して出力する。例えば、エンジンECU24は、スロットルバルブ123の位置を調節するスロットルモータ125への制御信号や燃料噴射弁127への制御信号、イグナイタと一体化されたイグニッションコイル129への制御信号、動弁機構130への制御信号等を出力ポートを介して出力する。また、エンジンECU24は、クランクポジションセンサ180からのクランクポジションを用いてエンジン22の回転数Neを算出する。更に、エンジンECU24は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてエンジン22を制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に出力する。
【0023】
また、実施例のエンジン22は、図2に示すように、一端が浄化装置141の後段の排気管に接続されると共に他端が吸気管126(サージタンク)に接続されたEGR管142、このEGR管142の中途に設けられて当該EGR管142を介して排気系から吸気系へと還流される排ガス(EGRガス)の還流量すなわちEGR量(排気再循環量)を調節するEGR弁143、EGR管142内のEGRガスの温度を検出する温度センサ144等を含むEGR装置(排気再循環装置)145を有している。実施例のEGR装置145は、EGR管142を介した排気再循環(排ガス還流)の実行に際してEGR率(=排気還流量/(吸入空気量+排気還流量))を例えば30〜40%と比較的高めに設定可能に構成されている。そして、実施例のエンジンECU24は、ハイブリッド自動車20の車速Vが予め定められた中車速域(例えば40〜100km/h)に含まれるときに、排気系から吸気系へと上述のように比較的高いEGR率で排ガスが還流されるようにEGR装置145のEGR弁143を制御する。
【0024】
プラネタリギヤ30は、モータMG1がエンジン22からの動力の少なくとも一部を用いて発電する発電機として機能するときにはプラネタリキャリア34に伝達されるエンジン22からの動力をサンギヤ31とリングギヤ32とにそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはプラネタリキャリア34に伝達されるエンジン22からの動力とサンギヤ31に伝達されるモータMG1からの動力を統合してリングギヤ32に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構37およびデファレンシャルギヤ38を介して最終的に駆動輪39a,39bに出力される。
【0025】
モータMG1およびMG2は、周知の同期発電電動機として構成されており、インバータ41,42を介してバッテリ50と電力のやり取りを行う。インバータ41,42とバッテリ50とを接続する電力ライン54は、各インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1およびMG2の何れか一方により発電される電力を他方のモータで消費可能とする。従って、バッテリ50は、モータMG1,MG2により発電される電力に応じて充放電され、モータMG1およびMG2間で電力収支のバランスをとれば充放電されないことになる。
【0026】
モータECU40は、図示しないCPUを中心とするマイクロコンピュータとして構成されている。モータECU40には、モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力され、モータECU40からは、インバータ41,42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいてモータMG1,MG2の回転子の回転数Nm1,Nm2を計算する。更に、モータECU40は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の状態に関するデータをハイブリッドECU70に出力する。
【0027】
バッテリECU52も図示しないCPUを中心とするマイクロコンピュータとして構成されている。バッテリECU52には、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧Vb、バッテリ50の出力端子に接続された電力ライン54に設置された図示しない電流センサからの充放電電流Ib、バッテリ50に設置された温度センサ51からのバッテリ温度Tb等が入力される。また、バッテリECU52は、ハイブリッドECU70やエンジンECU24と通信し、必要に応じてバッテリ50の状態に関するデータをハイブリッドECU70やエンジンECU24に出力する。更に、バッテリECU52は、電流センサにより検出された充放電電流Ibの積算値に基づいてバッテリ50の充電割合を示す残容量SOCを算出したり、残容量SOCに基づいてバッテリ50の目標充放電電力としての充放電要求パワーPb*(実施例では、放電側を正とし、充電側を負とする)を算出したり、残容量SOCとバッテリ温度Tbとに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出したりする。
【0028】
ハイブリッドECU70は、CPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROMや、データを一時的に記憶するRAM、図示しない入出力ポートおよび通信ポート等を備える。ハイブリッドECU70は、上述したようにエンジンECU24やモータECU40、バッテリECU52等と通信し、エンジンECU24やモータECU40、バッテリECU52等と各種信号やデータのやり取りを行う。また、ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置(シフトポジション)に対応したシフトレンジSRを検出するシフトレンジセンサ82からのシフトレンジSR、運転者による駆動力要求量としてのアクセルペダル83の踏み込み量(アクセル操作量)を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速センサ87からの車速V等が入力ポートを介して入力される。
【0029】
上述のように構成された実施例のハイブリッド自動車20では、アクセル開度Accと車速Vとに基づいて駆動軸としてのリングギヤ軸32aに出力すべき要求トルクTr*が計算され、この要求トルクTr*に応じたトルクがリングギヤ軸32aに出力されるようにエンジン22とモータMG1とモータMG2とが制御される。エンジン22とモータMG1とモータMG2との制御モードとしては、要求トルクTr*に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されてリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御するトルク変換運転モードや、要求トルクTr*とバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求トルクTr*に基づくトルクがリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御する充放電運転モード、エンジン22を停止して要求トルクTr*に基づくトルクをリングギヤ軸32aに出力するようにモータMG2を駆動制御するモータ運転モード等がある。また、実施例のハイブリッド自動車20では、トルク変換運転モードや充放電運転モードのもとで所定条件が成立した場合、エンジン22を自動的に停止・始動させる間欠運転が実行される。
【0030】
次に、エンジン22が運転された状態で上述のハイブリッド自動車20が走行するときの動作について説明する。図3は、エンジン22が運転された状態で運転者によりアクセルペダル83が踏み込まれているときに実施例のハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行されるエンジン運転時駆動制御ルーチンの一例を示すフローチャートである。
【0031】
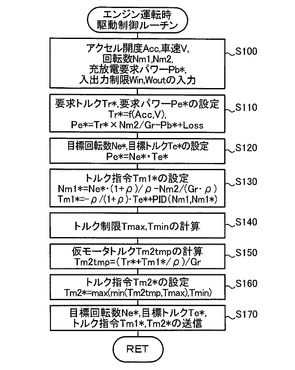
図3のルーチンの開始に際して、ハイブリッドECU70のCPUは、アクセルペダルポジションセンサ84からのアクセル開度Accや、車速センサ87からの車速V、モータMG1,MG2の回転数Nm1,Nm2、バッテリ50の充放電要求パワーPb*や入出力制限Win,Woutといった制御に必要なデータの入力処理を実行する(ステップS100)。モータMG1,MG2の回転数Nm1,Nm2は、モータECU40から通信により入力され、バッテリ50の充放電要求パワーPb*や入出力制限Win,Woutは、バッテリECU52から通信により入力されるものである。ステップS100のデータ入力処理の後、図4に例示する要求トルク設定用マップからステップS100にて入力したアクセル開度Accおよび車速Vに対応したリングギヤ軸32aに出力すべき要求トルクTr*を導出・設定した上で、エンジン22に出力させるパワーの指令値である要求パワーPe*を設定する(ステップS110)。実施例において、要求パワーPe*は、ハイブリッド自動車20の走行に要求される要求走行パワーすなわち走行に要求される要求トルクTr*と駆動軸としてのリングギヤ軸32aの回転数Nr(モータMG2の回転数Nm2/減速ギヤ機構35のギヤ比Gr、または車速V×換算係数k)との積から充放電要求パワーPb*を減じた値に損失分Lossを加算することにより得られる。
【0032】
ステップS110の処理の後、要求パワーPe*に基づいてエンジン22の目標運転ポイントとしての目標回転数Ne*および目標トルクTe*を設定する(ステップS120)。実施例では、目標回転数Ne*および目標トルクTe*を設定するために、エンジン22を効率よく動作させるように予め定められた動作ライン(最適燃費ライン)が用意されており、ステップS120では、当該動作ラインから要求パワーPe*に対応した目標回転数Ne*が導出・設定される。図5にエンジン22の動作ラインの一例を示す。そして、要求パワーPe*を目標回転数Ne*で除することによりエンジン22の目標トルクTe*を設定する(ステップS120)。続いて、目標回転数Ne*とリングギヤ軸32aの回転数Nr(Nm2/Grまたはk・V)とプラネタリギヤ30のギヤ比ρ(サンギヤ31の歯数/リングギヤ32の歯数)とを用いて次式(1)に従いモータMG1の目標回転数Nm1*を計算した上で、エンジン22の目標トルクTe*や目標回転数Nm1*や現在の回転数Nm1等を用いて次式(2)に従いモータMG1に対するトルク指令Tm1*を設定する(ステップS130)。式(1)は、プラネタリギヤ30の回転要素に対する力学的な関係式であり、図6に例示するプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図から容易に導出されるものである。そして、式(2)は、モータMG1をエンジン22の目標回転数Ne*に対応した目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0033】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/(Gr・ρ) …(1)
Tm1*=-ρ/(1+ρ)・Te*+k1・(Nm1*-Nm1)+k2・∫(Nm1*-Nm1)dt …(2)
【0034】
モータMG1に対するトルク指令Tm1*を設定したならば、バッテリ50の入出力制限Win,Woutとトルク指令Tm1*とモータMG1,MG2の現在の回転数Nm1,Nm2とを用いてモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(3)および(4)に従い計算する(ステップS140)。更に、要求トルクTr*とトルク指令Tm1*とプラネタリギヤ30のギヤ比ρと減速ギヤ機構35のギヤ比Grとを用いてモータMG2から出力すべきトルクの仮の値である仮モータトルクTm2tmpを次式(5)に従い計算する(ステップS150)。そして、モータMG2に対するトルク指令Tm2*をトルク制限Tmin,Tmaxで仮モータトルクTm2tmpを制限した値に設定する(ステップS160)。このようしてモータMG2に対するトルク指令Tm2*を設定することにより、リングギヤ軸32aに出力するトルクをバッテリ50の入出力制限Win,Woutの範囲内に制限することができる。なお、式(5)は、図6の共線図から容易に導出され得るものである。
【0035】
Tmin=(Win-Tm1*・Nm1)/Nm2 …(3)
Tmax=(Wout-Tm1*・Nm1)/Nm2 …(4)
Tm2tmp=(Tr*+Tm1*/ρ)/Gr …(5)
【0036】
こうしてモータMG1,MG2に対するトルク指令Tm1*,Tm2*を設定したならば、エンジン22の目標回転数Ne*および目標トルクTe*をエンジンECU24に送信すると共に、モータMG1,MG2のトルク指令Tm1*,Tm2*をモータECU40にそれぞれ送信し(ステップS170)、本ルーチンを一旦終了させる。ハイブリッドECU70から目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、目標回転数Ne*と目標トルクTe*とに基づいて吸入空気量制御(スロットルバルブ123の開度制御)や燃料噴射制御、点火時期制御等を実行する。また、ハイブリッドECU70からトルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0037】
ここで、ハイブリッド自動車20の走行中にエンジン22が運転されると共に車速Vが上述の中車速域に含まれるときには、排気系から吸気系へと排ガスが還流されるようにEGR装置145のEGR弁143が制御されるが、このようなEGR装置を有するエンジンについて鋭意研究を行った結果、排気再循環の非実行時と実行時とでは、エンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーが図7に示すように異なることが判明した。すなわち、排気再循環が実行されない状態でエンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーPe1よりも、排気再循環が実行された状態でエンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーPe2(Pe2>Pe1)の方が高くなり、特に排ガスの還流量が多い程このような傾向が強まってパワーPe1とパワーPe2との差、つまり排気再循環の非実行時と実行時との間におけるエンジン効率を良好に確保可能とするパワーの範囲の差が大きくなる。このような研究結果を踏まえて、実施例のハイブリッド自動車20では、エンジン22に出力させるパワーの指令値である要求パワーPe*の算出に用いられる充放電要求パワーPb*を排気再循環の非実行時と実行時とで異ならせることにより排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べてより適正に増加させてエンジン22の燃費を向上させるべく、バッテリECU52により図8に例示する充放電要求パワー設定ルーチンが所定時間毎に繰り返し実行される。
【0038】
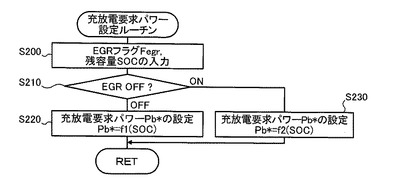
図8のルーチンの開始に際して、バッテリECU52のCPUは、EGRフラグFegrの値やバッテリ50の残容量SOCといった充放電要求パワーPb*の設定に必要なデータの入力処理を実行する(ステップS200)。EGRフラグFegrは、エンジンECU24により排気再循環が実行されないときに値0に設定されると共に排気再循環が実行されるときに値1に設定されるものであり、エンジンECU24から通信により入力される。ステップS200のデータ入力処理の後、EGRフラグFegrの値に基づいてEGR装置145により排気再循環が実行されているか否かを判定する(ステップS210)。そして、EGR装置145により排気再循環が実行されていない場合には、排気再循環の非実行時における残容量SOCと充放電要求パワーPb*との関係を予め定めた第1充放電要求パワー設定用マップからステップS200にて入力した残容量SOCに対応した充放電要求パワーPb*を導出・設定し(ステップS220)、本ルーチンを一旦終了させる。また、EGR装置145により排気再循環が実行されている場合には、排気再循環の実行時における残容量SOCと充放電要求パワーPb*との関係を予め定めた第2充放電要求パワー設定用マップからステップS200にて入力した残容量SOCに対応した充放電要求パワーPb*を導出・設定し(ステップS230)、本ルーチンを一旦終了させる。
【0039】
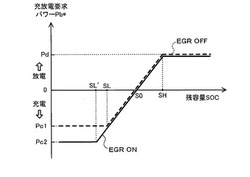
図9は、第1充放電要求パワー設定用マップ(同図における破線参照)と第2充放電要求パワー設定用マップ(同図における実線参照)とを例示する説明図である。同図に示すように、排気再循環の非実行時に用いられる第1充放電要求パワー設定用マップは、残容量SOCが予め定められた制御中心S0(例えば50%)から当該制御中心S0よりも大きい所定値SHまでの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して一定のレート(変化量)で変化する正の値(放電電力)に設定すると共に、残容量SOCが当該所定値SH以上になると充放電要求パワーPb*を一定の放電電力(正の値)Pdに設定するように作成されている。また、第1充放電要求パワー設定用マップは、残容量SOCが制御中心S0から予め定められた強制充電開始値SL(例えば40%)までの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する負の値(充電電力)に設定すると共に、残容量SOCが強制充電開始値SL以下になると充放電要求パワーPb*を一定の第1充電電力(負の値)Pc1に設定するように作成されている。実施例において、第1充電電力Pc1は、ハイブリッド自動車20の走行中に排気再循環が実行されない状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動して当該モータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、上述のパワーPe1を中心とした所定範囲すなわち排気再循環の非実行時にエンジン効率を良好に確保可能とするパワー範囲内にできるだけ含まれるように実験・解析を経て定められる。
【0040】
一方、排気再循環の実行時に用いられる第2充放電要求パワー設定用マップは、残容量SOCが制御中心S0から所定値SHまでの範囲にあるときに第1充放電要求パワー設定用マップと同様に充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する正の値(放電電力)に設定すると共に、残容量SOCが当該所定値SH以上になると第1充放電要求パワー設定用マップと同様に充放電要求パワーPb*を一定の正の値(放電電力)Pdに設定するように作成されている。また、第2充放電要求パワー設定用マップは、残容量SOCが制御中心S0から予め定められた強制充電開始値SL′(SL′<SL)までの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する負の値(充電電力)に設定すると共に、残容量SOCが強制充電開始値SL′以下になると充放電要求パワーPb*を上記第1充電電力Pc1よりも小さい一定の第2充電電力(負の値)Pc2に設定するように作成されている。実施例において、第2充電電力Pc2は、ハイブリッド自動車20の走行中に排気再循環が実行さる(車速Vが上述の中車速域に含まれる)状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動して当該モータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、上述のパワーPe2を中心とした所定範囲すなわち排気再循環の実行時にエンジン効率を良好に確保可能とするパワー範囲内にできるだけ含まれるように実験・解析を経て定められる。
【0041】
上述の第1および第2充放電要求パワー設定用マップを用いた図8の充放電要求パワー設定ルーチンが実行されることにより、実施例のハイブリッド自動車20では、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときに、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときに比べて充放電要求パワーPb*が充電側に増加させられる。従って、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときに、エンジン22に対する要求パワーPe*は、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときの同一のアクセル開度Acc(および車速V)すなわち要求トルクTr*に対応した要求パワーPe*よりも増加するように設定される(図3のステップS110)。すなわち、運転者によるアクセル開度Acc(および車速V)が同一である場合、バッテリ50の充電が要求されると共に排気再循環が実行されるときの要求パワーPe*(エンジン22の出力パワー)は、バッテリ50の充電が要求されると共に排気再循環が実行されないときの要求パワーPe*よりも大きくなる。そして、エンジン22が要求パワーPe*(および動作ライン)に応じた目標運転ポイント(目標回転数Ne*および目標トルクTe*)で運転されると共に要求トルクTr*に基づくトルクが駆動軸としてのリングギヤ軸32aに出力されるようにエンジン22とモータMG1およびMG2が制御されることになる(図3のステップS120−S170)。
【0042】
これにより、バッテリ50の充電が要求されると共にEGR装置145による排気再循環が実行されないときには、排気再循環が実行されない状態でエンジン効率が最も良くなるときに当該エンジン22から出力されるパワーPe1を中心とした所定範囲内のパワーを出力するようにエンジン22が運転されることになる。また、バッテリ50の充電が要求されると共にEGR装置145による排気再循環が実行されるときには、排気再循環が実行される状態でエンジン効率が最も良くなるときに当該エンジン22から出力されるパワーPe2を中心とした所定範囲内のパワーを出力するようにエンジン22が運転されることになる。この結果、EGR装置145を有するエンジン22の燃費をより向上させ、ひいては当該エンジン22を備えたハイブリッド自動車20におけるエネルギ効率をより向上させることが可能となる。そして、排気再循環の実行時にエンジン22の要求パワーPe*を排気再循環の非実行時に比べて増加させることにより生じるエンジン22の出力パワーの増加分は、モータMG1を発電機として駆動するのに利用可能であり、モータMG1により発電された電力の増加分は、バッテリ50の充電やモータMG2の駆動に供することができる。
【0043】
以上説明したように、実施例のハイブリッド自動車20では、EGR装置145により排気再循環が実行されるときに、同一のアクセル開度Acc(および車速V)に対するエンジン22の出力パワーが排気再循環が実行されないときに比べて増加するように当該エンジン22の要求パワーPe*が設定される。これにより、EGR装置145を有するエンジン22の燃費をより向上させ、ひいては当該エンジン22を備えたハイブリッド自動車20におけるエネルギ効率をより向上させることが可能となる。そして、上述のようなエンジン効率が最も良くなるときにエンジン22から出力されるパワーが排気再循環の非実行時に比べて排気再循環の実行時に高くなる傾向は、EGR率が高く設定されるエンジンや、EGR率が比較的低くても排気再循環の実行時にEGR量が多くなる大排気量エンジンにおいて特に強まる。従って、本発明は、EGR率が高く設定されるエンジンや、EGR装置を有する大排気量エンジンを搭載したハイブリッド自動車に極めて有用である。
【0044】
また、上記実施例では、要求パワーPe*がハイブリッド自動車20の走行に要求される要求走行パワー(=Tr*×Nr)とバッテリ50の充放電要求パワーPb*とに基づいて設定され、バッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときには、バッテリ50の充電が要求されると共に排気再循環が実行されないときに比べて充放電要求パワーPb*が充電側に増加させられる。これにより、必要以上に要求パワーPe*を増加させることで却ってエンジン22の燃費を悪化させないようしながら、EGR装置145により排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べてより増加させることが可能となる。ただし、充放電要求パワーPb*を異ならせる代わりに、バッテリ50の充電が要求されると共に排気再循環が実行されるときに、バッテリ50の充電が要求されると共に排気再循環が実行されないときに比べて要求パワーPe*を所定値だけ増加させてもよい。
【0045】
更に、上記実施例では、バッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときには、充放電要求パワーPb*が第1充電電力Pc1に設定されると共に、バッテリ50の充電が要求されると共に排気再循環が実行されるときには、充放電要求パワーPb*が第1充電電力Pc1よりも充電電力として大きい第2充電電力Pc2に設定される。そして、第1充電電力Pc1は、ハイブリッド自動車20の走行中に排気再循環が実行されない状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動してモータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、排気再循環が実行されない状態でエンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe1を中心とした所定範囲内に含まれるように定められる。また、第2充電電力Pc2は、ハイブリッド自動車20の走行中に排気再循環が実行される状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動してモータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、排気再循環が実行される状態でエンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe2(Pe2>Pe1)を中心とした所定範囲内に含まれるように定められる。これにより、バッテリ50の充電が要求されているときに、排気再循環の有無に拘わらず、エンジン22から実際に出力されるパワーを当該エンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe1またはPe2に近づけることができるので、エンジン22の燃費をより向上させることが可能となる。また、排気再循環の非実行時と実行時とでエンジン22の目標運転ポイントを設定するための動作ラインを異ならせる必要がなくなるので、動作ラインの適合に要する負担を軽減することが可能となる。
【0046】
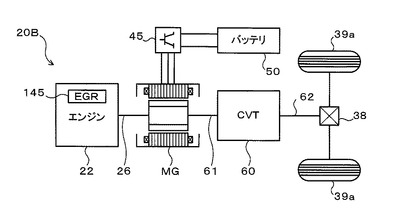
なお、上述のようにEGR装置145により排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べて増加させる代わりに、EGR装置145により排気再循環が実行されるときにエンジン22の目標回転数Ne*を排気再循環が実行されないときに比べて増加させたり、EGR装置145により排気再循環が実行されるときに要求パワーPe*に基づいて設定されるスロットルバルブ123の目標開度を排気再循環が実行されないときに比べて増加させたりしてもよい。また、上記実施例のハイブリッド自動車20は、モータMG1の回転軸に接続されるサンギヤ31と、駆動輪39a,39bに連結されるリングギヤ軸32aに接続されるリングギヤ32と、エンジン22のクランクシャフト26に接続されるプラネタリキャリア34とを有するプラネタリギヤ30と、リングギヤ32に連結されるモータMG2とを含むものであるが、本発明のハイブリッド車両の構成は、これに限られるものではない。すなわち、プラネタリギヤ30の回転要素に対して上述のようにエンジン22やモータMG1およびMG2を接続する代わりに、プラネタリギヤ30のサンギヤ(第1要素)31にモータMG2の回転軸を接続し、リングギヤ(第2要素)32にモータMG1の回転軸およびエンジン22のクランクシャフト26を接続し、かつプラネタリキャリア(第3要素)34に駆動輪39a,39bに連結される駆動軸を接続してもよい。更に、本発明は、EGR装置145を有するエンジン(内燃機関)22と、エンジン22のクランクシャフト26に接続されたモータMGと、モータMGの回転軸に接続される入力軸61(プライマリシャフト)を有すると共にデファレンシャルギヤ38を介して駆動輪39a,39bに連結される出力軸62とを有する機械式の無段変速機(例えばベルト式CVT)60と、インバータ45を介してモータMGと電力をやり取りするバッテリ50とを備えた図9に示すハイブリッド自動車20Bに適用されてもよい。また、減速ギヤ機構35の代わりに、例えばHi,Loの2段の変速段あるいは3段以上の変速段を有したモータMG2の回転数を変速してリングギヤ軸32aに伝達する変速機を採用してもよい。
【0047】
ここで、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。すなわち、上記実施例では、エンジン22が「内燃機関」に相当し、エンジン22からの動力の少なくとも一部を用いて発電可能なモータMG1,MGが「電動機」に相当し、モータMG1と電力をやり取り可能なバッテリ50が「蓄電手段」に相当し、プラネタリギヤ30が「遊星歯車機構」に相当し、モータMG2が「第2の電動機」に相当し、無段変速機60が「無段変速機」に相当する。
【0048】
ただし、実施例の主要な要素と課題を解決するための手段の欄に記載された発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載された発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載された発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載された発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0049】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0050】
本発明は、ハイブリッド車両の製造産業等において利用可能である。
【符号の説明】
【0051】
20,20B ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 プラネタリキャリア、39a,39b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42,45 インバータ、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、60 無段変速機、61 入力軸、62 出力軸、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、142 EGR管、143 EGR弁、144 温度センサ、145 EGR装置、MG1,MG2 モータ。
【技術分野】
【0001】
本発明は、排気再循環装置を有する内燃機関と、当該内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、当該電動機と電力をやり取り可能な蓄電装置とを備えたハイブリッド車両およびその制御方法に関する。
【背景技術】
【0002】
従来、この種のハイブリッド車両として、排気再循環(EGR)の非実行時には内燃機関に要求される要求パワーと排気再循環なしに内燃機関が効率よく運転されるように予め定められた第1の動作ラインとを用いて当該内燃機関の運転ポイント(目標回転数および目標トルク)を設定すると共に、排気再循環の実行時には上記要求パワーと排気再循環を伴って内燃機関が効率よく運転されるように予め定められた第2の動作ラインとを用いて当該内燃機関の運転ポイントを設定するものが知られている(例えば、特許文献1参照)。このハイブリッド車両では、排気再循環の実行時における内燃機関の運転ポイントが同一の要求パワーに対応した排気再循環の非実行時における運転ポイントに比べて高回転側かつ低トルク側に移動するように第1および第2の動作ラインが定められている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−076505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の排気再循環は、NOxの低減を図ると共に内燃機関の燃費を向上させるために採用されるものである。しかしながら、上記従来のハイブリッド車両のように排気再循環の非実行時と実行時とで異なる動作ラインを用いて、同一の要求パワーに対する内燃機関の運転ポイントを排気再循環の非実行時と実行時とで変更しても、排気再循環の実行時における燃費がさほど改善されないことがある。
【0005】
そこで、本発明は、排気再循環装置を有する内燃機関を備えたハイブリッド車両において、当該内燃機関の燃費をより向上させ、ひいては当該ハイブリッド車両におけるエネルギ効率をより向上させることを主目的とする。
【課題を解決するための手段】
【0006】
本発明によるハイブリッド車両およびその制御方法は、上記主目的を達成するために以下の手段を採っている。
【0007】
本発明によるハイブリッド車両は、
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とする。
【0008】
本発明者らが排気再循環装置を有する内燃機関について鋭意研究を行った結果、内燃機関の効率(燃料消費率)が最も良くなるときに当該内燃機関から出力されるパワーは、排気再循環の非実行時に比べて排気再循環の実行時に高くなり、特に排気再循環量が多い程このような傾向が強まることが判明した。このような研究結果を踏まえて、本発明のハイブリッド車両では、排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する内燃機関の出力パワーが排気再循環が実行されないときに比べて増加させられる。これにより、排気再循環装置を有する内燃機関の燃費をより向上させ、ひいては当該内燃機関を備えたハイブリッド車両におけるエネルギ効率をより向上させることが可能となる。なお、排気再循環の実行時に内燃機関の出力パワーを排気再循環の非実行時に比べて増加させることにより生じる内燃機関の出力パワーの増加分は、電動機を発電機として駆動するのに利用可能であり、当該電動機により発電された電力は蓄電装置の充電等に供することができる。
【0009】
また、前記排気再循環装置により排気再循環が実行されるときに、前記内燃機関に出力させるパワーの指令値である要求パワーを該排気再循環が実行されないときに比べて増加させてもよい。これにより、排気再循環が実行されるときに、同一の駆動力要求量に対する内燃機関の出力パワーを排気再循環が実行されないときに比べて増加させることが可能となる。
【0010】
更に、前記要求パワーは、少なくとも前記ハイブリッド車両の走行に要求される要求走行パワーと前記蓄電装置の目標充放電電力とに基づいて設定されてもよく、前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されるときには、該蓄電装置の充電が要求されると共に該排気再循環が実行されないときに比べて前記目標充放電電力を充電側に増加させてもよい。これにより、必要以上に要求パワーを増加させることで却って内燃機関の燃費を悪化させないようしながら、排気再循環装置により排気再循環が実行されるときに要求パワーを排気再循環が実行されないときに比べてより増加させることが可能となる。
【0011】
また、前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されないときには、前記目標充放電電力が第1の充電電力に設定されると共に、該蓄電装置の充電が要求されると共に該排気再循環が実行されるときには、前記目標充放電電力が前記第1の充電電力よりも充電電力として大きい第2の充電電力に設定されてもよく、前記第1の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行されない状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行されない状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められてもよく、前記第2の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行される状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行される状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められてもよい。これにより、蓄電装置の充電が要求されているときに、排気再循環の有無に拘わらず、内燃機関から実際に出力されるパワーを当該内燃機関の効率が最も良くなるときに内燃機関から出力されるパワーに近づけることができるので、当該内燃機関の燃費をより向上させることが可能となる。
【0012】
更に、前記ハイブリッド車両は、前記電動機の回転軸に接続される第1要素と、駆動輪に連結される駆動軸に接続される第2要素と、前記内燃機関の出力軸に接続される第3要素とを有する遊星歯車機構と、前記第2要素に連結される第2の電動機とを備えるものであってもよい。
【0013】
また、前記ハイブリッド車両は、前記電動機とは異なる第2の電動機の回転軸に接続される第1要素と、前記電動機の回転軸および前記内燃機関の出力軸に接続される第2要素と、駆動輪に連結される駆動軸に接続される第3要素とを有する遊星歯車機構を備えるものであってもよい。
【0014】
また、前記ハイブリッド車両において、前記電動機の回転軸の一端は、前記内燃機関の出力軸に接続されてもよく、当該ハイブリッド車両は、前記電動機の前記回転軸の他端に接続される入力軸と、駆動輪に連結される出力軸とを有する無段変速機を備えるものであってもよい。
【0015】
本発明によるハイブリッド車両の制御方法は、
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両の制御方法において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とする。
【0016】
この方法によれば、排気再循環装置を有する内燃機関の燃費をより向上させ、ひいては当該内燃機関を備えたハイブリッド車両におけるエネルギ効率をより向上させることが可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の実施例に係るハイブリッド車両であるハイブリッド自動車20の概略構成図である。
【図2】エンジン22の概略構成図である。
【図3】実施例のハイブリッドECU70により実行されるエンジン運転時駆動制御ルーチンの一例を示すフローチャートである。
【図4】要求トルク設定用マップの一例を示す説明図である。
【図5】エンジン22の動作ラインの一例を示す説明図である。
【図6】ハイブリッド自動車20が走行するときのプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を示す説明図である。
【図7】排気再循環の非実行時および実行時におけるエンジン22の出力パワーとエンジン22の正味燃料消費率との関係を例示する説明図である。
【図8】実施例のバッテリECU52により実行される充放電要求パワー設定ルーチンの一例を示すフローチャートである。
【図9】充放電要求パワー設定用マップの一例を示す説明図である。
【図10】変形例に係るハイブリッド自動車20Bの概略構成図である。
【発明を実施するための形態】
【0018】
次に、本発明を実施するための形態を実施例を用いて説明する。
【実施例】
【0019】
図1は、本発明の実施例に係るハイブリッド車両であるハイブリッド自動車20の概略構成図である。同図に示すハイブリッド自動車20は、ガソリンや軽油といった炭化水素系の燃料を用いて動力を出力するエンジン(内燃機関)22と、エンジン22を制御するエンジン用電子制御ユニット(以下、「エンジンECU」という)24と、サンギヤ(第1要素)31、駆動軸としてのリングギヤ軸32aに接続されたリングギヤ(第2要素)32、および複数のピニオンギヤ33を支持すると共にダンパ28を介してエンジン22のクランクシャフト(出力軸)26に接続されたプラネタリキャリア(第3要素)34を有するシングルピニオン式のプラネタリギヤ30と、プラネタリギヤ30のサンギヤ31に接続されると共に主として発電機として作動するモータMG1と、減速ギヤ機構35およびリングギヤ軸32aを介してリングギヤ32に接続されたモータMG2と、リングギヤ軸32aにギヤ機構37やデファレンシャルギヤ38を介して連結された駆動輪39a,39bと、モータMG1,MG2を駆動するためのインバータ41,42と、インバータ41,42に接続されたリチウムイオン二次電池あるいはニッケル水素二次電池であるバッテリ50と、インバータ41,42を介してモータMG1およびMG2を駆動制御するモータ用電子制御ユニット(以下、「モータECU」という)40と、バッテリ50を管理するバッテリ用電子制御ユニット(以下、「バッテリECU」という)52と、エンジンECU24やモータECU40、バッテリECU52等と通信しながら車両全体を制御するハイブリッド用電子制御ユニット(以下、「ハイブリッドECU」という)70とを備える。
【0020】
エンジン22は、ガソリンや軽油といった炭化水素系の燃料と空気との混合気を燃焼室120内で爆発燃焼させ、混合気の爆発燃焼に伴うピストン121の往復運動をクランクシャフト26の回転運動へと変換することにより動力を出力する内燃機関として構成されている。このエンジン22では、図2からわかるように、エアクリーナ122により清浄された空気がスロットルバルブ123を介して吸気管126内に取り入れられ、吸入空気には燃料噴射弁127からガソリン等の燃料が噴射される。こうして得られる空気と燃料との混合気は、可変バルブタイミング機能を有する動弁機構130により駆動される吸気バルブ131を介して燃焼室120に吸入されると共に点火プラグ128からの電気火花によって爆発燃焼させられる。エンジン22からの排ガスは、排気バルブ132や排気マニホールド140を介して一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)といった有害成分を浄化する排ガス浄化触媒(三元触媒)141cを含む浄化装置141へと送出され、浄化装置141にて浄化された後、外部へと排出される。
【0021】
このように構成されるエンジン22を制御するエンジンECU24は、図示しないCPUを中心とするマイクロコンピュータとして構成されている。エンジンECU24には、エンジン22に対して設けられて当該エンジン22の運転状態を検出する各種センサからの信号が入力される。例えば、エンジンECU24には、クランクシャフト26の回転位置を検出するクランクポジションセンサ180からのクランクポジションやエンジン22の冷却水の温度を検出する水温センサ181からの冷却水温Tw、燃焼室120内の圧力を検出する筒内圧センサ182からの筒内圧力、吸気バルブ131や排気バルブ132を駆動する動弁機構130に含まれるカムシャフトの回転位置を検出するカムポジションセンサ133からのカムポジション、スロットルバルブ123の位置を検出するスロットルバルブポジションセンサ124からのスロットルポジション、エンジン22の負荷としての吸入空気量を検出するエアフローメータ183からの吸入空気量Q、吸気管126に取り付けられた吸気温度センサ184からの吸気温度Tair、吸気管126内の圧力(負圧)を検出する吸気圧センサ185からの吸気負圧Pi、排気マニホールド140の浄化装置141の上流側に配置された空燃比センサ186からの空燃比AF等が図示しない入力ポートを介して入力される。
【0022】
そして、エンジンECU24は、エンジン22を作動させるための様々な制御信号を図示しない出力ポートを介して出力する。例えば、エンジンECU24は、スロットルバルブ123の位置を調節するスロットルモータ125への制御信号や燃料噴射弁127への制御信号、イグナイタと一体化されたイグニッションコイル129への制御信号、動弁機構130への制御信号等を出力ポートを介して出力する。また、エンジンECU24は、クランクポジションセンサ180からのクランクポジションを用いてエンジン22の回転数Neを算出する。更に、エンジンECU24は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてエンジン22を制御すると共に必要に応じてエンジン22の運転状態に関するデータをハイブリッドECU70に出力する。
【0023】
また、実施例のエンジン22は、図2に示すように、一端が浄化装置141の後段の排気管に接続されると共に他端が吸気管126(サージタンク)に接続されたEGR管142、このEGR管142の中途に設けられて当該EGR管142を介して排気系から吸気系へと還流される排ガス(EGRガス)の還流量すなわちEGR量(排気再循環量)を調節するEGR弁143、EGR管142内のEGRガスの温度を検出する温度センサ144等を含むEGR装置(排気再循環装置)145を有している。実施例のEGR装置145は、EGR管142を介した排気再循環(排ガス還流)の実行に際してEGR率(=排気還流量/(吸入空気量+排気還流量))を例えば30〜40%と比較的高めに設定可能に構成されている。そして、実施例のエンジンECU24は、ハイブリッド自動車20の車速Vが予め定められた中車速域(例えば40〜100km/h)に含まれるときに、排気系から吸気系へと上述のように比較的高いEGR率で排ガスが還流されるようにEGR装置145のEGR弁143を制御する。
【0024】
プラネタリギヤ30は、モータMG1がエンジン22からの動力の少なくとも一部を用いて発電する発電機として機能するときにはプラネタリキャリア34に伝達されるエンジン22からの動力をサンギヤ31とリングギヤ32とにそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはプラネタリキャリア34に伝達されるエンジン22からの動力とサンギヤ31に伝達されるモータMG1からの動力を統合してリングギヤ32に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構37およびデファレンシャルギヤ38を介して最終的に駆動輪39a,39bに出力される。
【0025】
モータMG1およびMG2は、周知の同期発電電動機として構成されており、インバータ41,42を介してバッテリ50と電力のやり取りを行う。インバータ41,42とバッテリ50とを接続する電力ライン54は、各インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1およびMG2の何れか一方により発電される電力を他方のモータで消費可能とする。従って、バッテリ50は、モータMG1,MG2により発電される電力に応じて充放電され、モータMG1およびMG2間で電力収支のバランスをとれば充放電されないことになる。
【0026】
モータECU40は、図示しないCPUを中心とするマイクロコンピュータとして構成されている。モータECU40には、モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流等が入力され、モータECU40からは、インバータ41,42へのスイッチング制御信号等が出力される。また、モータECU40は、回転位置検出センサ43,44から入力した信号に基づいてモータMG1,MG2の回転子の回転数Nm1,Nm2を計算する。更に、モータECU40は、ハイブリッドECU70と通信し、ハイブリッドECU70からの信号等に基づいてモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の状態に関するデータをハイブリッドECU70に出力する。
【0027】
バッテリECU52も図示しないCPUを中心とするマイクロコンピュータとして構成されている。バッテリECU52には、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧Vb、バッテリ50の出力端子に接続された電力ライン54に設置された図示しない電流センサからの充放電電流Ib、バッテリ50に設置された温度センサ51からのバッテリ温度Tb等が入力される。また、バッテリECU52は、ハイブリッドECU70やエンジンECU24と通信し、必要に応じてバッテリ50の状態に関するデータをハイブリッドECU70やエンジンECU24に出力する。更に、バッテリECU52は、電流センサにより検出された充放電電流Ibの積算値に基づいてバッテリ50の充電割合を示す残容量SOCを算出したり、残容量SOCに基づいてバッテリ50の目標充放電電力としての充放電要求パワーPb*(実施例では、放電側を正とし、充電側を負とする)を算出したり、残容量SOCとバッテリ温度Tbとに基づいてバッテリ50の充電に許容される電力である許容充電電力としての入力制限Winとバッテリ50の放電に許容される電力である許容放電電力としての出力制限Woutとを算出したりする。
【0028】
ハイブリッドECU70は、CPUを中心とするマイクロコンピュータとして構成されており、CPUの他に各種プログラムを記憶するROMや、データを一時的に記憶するRAM、図示しない入出力ポートおよび通信ポート等を備える。ハイブリッドECU70は、上述したようにエンジンECU24やモータECU40、バッテリECU52等と通信し、エンジンECU24やモータECU40、バッテリECU52等と各種信号やデータのやり取りを行う。また、ハイブリッドECU70には、イグニッションスイッチ(スタートスイッチ)80からのイグニッション信号、シフトレバー81の操作位置(シフトポジション)に対応したシフトレンジSRを検出するシフトレンジセンサ82からのシフトレンジSR、運転者による駆動力要求量としてのアクセルペダル83の踏み込み量(アクセル操作量)を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルストロークセンサ86からのブレーキペダルストロークBS、車速センサ87からの車速V等が入力ポートを介して入力される。
【0029】
上述のように構成された実施例のハイブリッド自動車20では、アクセル開度Accと車速Vとに基づいて駆動軸としてのリングギヤ軸32aに出力すべき要求トルクTr*が計算され、この要求トルクTr*に応じたトルクがリングギヤ軸32aに出力されるようにエンジン22とモータMG1とモータMG2とが制御される。エンジン22とモータMG1とモータMG2との制御モードとしては、要求トルクTr*に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にエンジン22から出力されるパワーのすべてがプラネタリギヤ30とモータMG1とモータMG2とによってトルク変換されてリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御するトルク変換運転モードや、要求トルクTr*とバッテリ50の充放電に必要な電力との和に見合うパワーがエンジン22から出力されるようにエンジン22を制御すると共にバッテリ50の充放電を伴ってエンジン22から出力されるパワーの全部またはその一部がプラネタリギヤ30とモータMG1とモータMG2とによるトルク変換を伴って要求トルクTr*に基づくトルクがリングギヤ軸32aに出力されるようモータMG1およびMG2を駆動制御する充放電運転モード、エンジン22を停止して要求トルクTr*に基づくトルクをリングギヤ軸32aに出力するようにモータMG2を駆動制御するモータ運転モード等がある。また、実施例のハイブリッド自動車20では、トルク変換運転モードや充放電運転モードのもとで所定条件が成立した場合、エンジン22を自動的に停止・始動させる間欠運転が実行される。
【0030】
次に、エンジン22が運転された状態で上述のハイブリッド自動車20が走行するときの動作について説明する。図3は、エンジン22が運転された状態で運転者によりアクセルペダル83が踏み込まれているときに実施例のハイブリッドECU70により所定時間毎(例えば、数msec毎)に実行されるエンジン運転時駆動制御ルーチンの一例を示すフローチャートである。
【0031】
図3のルーチンの開始に際して、ハイブリッドECU70のCPUは、アクセルペダルポジションセンサ84からのアクセル開度Accや、車速センサ87からの車速V、モータMG1,MG2の回転数Nm1,Nm2、バッテリ50の充放電要求パワーPb*や入出力制限Win,Woutといった制御に必要なデータの入力処理を実行する(ステップS100)。モータMG1,MG2の回転数Nm1,Nm2は、モータECU40から通信により入力され、バッテリ50の充放電要求パワーPb*や入出力制限Win,Woutは、バッテリECU52から通信により入力されるものである。ステップS100のデータ入力処理の後、図4に例示する要求トルク設定用マップからステップS100にて入力したアクセル開度Accおよび車速Vに対応したリングギヤ軸32aに出力すべき要求トルクTr*を導出・設定した上で、エンジン22に出力させるパワーの指令値である要求パワーPe*を設定する(ステップS110)。実施例において、要求パワーPe*は、ハイブリッド自動車20の走行に要求される要求走行パワーすなわち走行に要求される要求トルクTr*と駆動軸としてのリングギヤ軸32aの回転数Nr(モータMG2の回転数Nm2/減速ギヤ機構35のギヤ比Gr、または車速V×換算係数k)との積から充放電要求パワーPb*を減じた値に損失分Lossを加算することにより得られる。
【0032】
ステップS110の処理の後、要求パワーPe*に基づいてエンジン22の目標運転ポイントとしての目標回転数Ne*および目標トルクTe*を設定する(ステップS120)。実施例では、目標回転数Ne*および目標トルクTe*を設定するために、エンジン22を効率よく動作させるように予め定められた動作ライン(最適燃費ライン)が用意されており、ステップS120では、当該動作ラインから要求パワーPe*に対応した目標回転数Ne*が導出・設定される。図5にエンジン22の動作ラインの一例を示す。そして、要求パワーPe*を目標回転数Ne*で除することによりエンジン22の目標トルクTe*を設定する(ステップS120)。続いて、目標回転数Ne*とリングギヤ軸32aの回転数Nr(Nm2/Grまたはk・V)とプラネタリギヤ30のギヤ比ρ(サンギヤ31の歯数/リングギヤ32の歯数)とを用いて次式(1)に従いモータMG1の目標回転数Nm1*を計算した上で、エンジン22の目標トルクTe*や目標回転数Nm1*や現在の回転数Nm1等を用いて次式(2)に従いモータMG1に対するトルク指令Tm1*を設定する(ステップS130)。式(1)は、プラネタリギヤ30の回転要素に対する力学的な関係式であり、図6に例示するプラネタリギヤ30の回転要素における回転数とトルクとの力学的な関係を示す共線図から容易に導出されるものである。そして、式(2)は、モータMG1をエンジン22の目標回転数Ne*に対応した目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。
【0033】
Nm1*=Ne*・(1+ρ)/ρ-Nm2/(Gr・ρ) …(1)
Tm1*=-ρ/(1+ρ)・Te*+k1・(Nm1*-Nm1)+k2・∫(Nm1*-Nm1)dt …(2)
【0034】
モータMG1に対するトルク指令Tm1*を設定したならば、バッテリ50の入出力制限Win,Woutとトルク指令Tm1*とモータMG1,MG2の現在の回転数Nm1,Nm2とを用いてモータMG2から出力してもよいトルクの上下限としてのトルク制限Tmin,Tmaxを次式(3)および(4)に従い計算する(ステップS140)。更に、要求トルクTr*とトルク指令Tm1*とプラネタリギヤ30のギヤ比ρと減速ギヤ機構35のギヤ比Grとを用いてモータMG2から出力すべきトルクの仮の値である仮モータトルクTm2tmpを次式(5)に従い計算する(ステップS150)。そして、モータMG2に対するトルク指令Tm2*をトルク制限Tmin,Tmaxで仮モータトルクTm2tmpを制限した値に設定する(ステップS160)。このようしてモータMG2に対するトルク指令Tm2*を設定することにより、リングギヤ軸32aに出力するトルクをバッテリ50の入出力制限Win,Woutの範囲内に制限することができる。なお、式(5)は、図6の共線図から容易に導出され得るものである。
【0035】
Tmin=(Win-Tm1*・Nm1)/Nm2 …(3)
Tmax=(Wout-Tm1*・Nm1)/Nm2 …(4)
Tm2tmp=(Tr*+Tm1*/ρ)/Gr …(5)
【0036】
こうしてモータMG1,MG2に対するトルク指令Tm1*,Tm2*を設定したならば、エンジン22の目標回転数Ne*および目標トルクTe*をエンジンECU24に送信すると共に、モータMG1,MG2のトルク指令Tm1*,Tm2*をモータECU40にそれぞれ送信し(ステップS170)、本ルーチンを一旦終了させる。ハイブリッドECU70から目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、目標回転数Ne*と目標トルクTe*とに基づいて吸入空気量制御(スロットルバルブ123の開度制御)や燃料噴射制御、点火時期制御等を実行する。また、ハイブリッドECU70からトルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*に従ってモータMG1が駆動されると共にトルク指令Tm2*に従ってモータMG2が駆動されるようにインバータ41,42のスイッチング素子のスイッチング制御を行なう。
【0037】
ここで、ハイブリッド自動車20の走行中にエンジン22が運転されると共に車速Vが上述の中車速域に含まれるときには、排気系から吸気系へと排ガスが還流されるようにEGR装置145のEGR弁143が制御されるが、このようなEGR装置を有するエンジンについて鋭意研究を行った結果、排気再循環の非実行時と実行時とでは、エンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーが図7に示すように異なることが判明した。すなわち、排気再循環が実行されない状態でエンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーPe1よりも、排気再循環が実行された状態でエンジン効率(正味燃料消費率)が最も良くなるときに当該エンジンから出力されるパワーPe2(Pe2>Pe1)の方が高くなり、特に排ガスの還流量が多い程このような傾向が強まってパワーPe1とパワーPe2との差、つまり排気再循環の非実行時と実行時との間におけるエンジン効率を良好に確保可能とするパワーの範囲の差が大きくなる。このような研究結果を踏まえて、実施例のハイブリッド自動車20では、エンジン22に出力させるパワーの指令値である要求パワーPe*の算出に用いられる充放電要求パワーPb*を排気再循環の非実行時と実行時とで異ならせることにより排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べてより適正に増加させてエンジン22の燃費を向上させるべく、バッテリECU52により図8に例示する充放電要求パワー設定ルーチンが所定時間毎に繰り返し実行される。
【0038】
図8のルーチンの開始に際して、バッテリECU52のCPUは、EGRフラグFegrの値やバッテリ50の残容量SOCといった充放電要求パワーPb*の設定に必要なデータの入力処理を実行する(ステップS200)。EGRフラグFegrは、エンジンECU24により排気再循環が実行されないときに値0に設定されると共に排気再循環が実行されるときに値1に設定されるものであり、エンジンECU24から通信により入力される。ステップS200のデータ入力処理の後、EGRフラグFegrの値に基づいてEGR装置145により排気再循環が実行されているか否かを判定する(ステップS210)。そして、EGR装置145により排気再循環が実行されていない場合には、排気再循環の非実行時における残容量SOCと充放電要求パワーPb*との関係を予め定めた第1充放電要求パワー設定用マップからステップS200にて入力した残容量SOCに対応した充放電要求パワーPb*を導出・設定し(ステップS220)、本ルーチンを一旦終了させる。また、EGR装置145により排気再循環が実行されている場合には、排気再循環の実行時における残容量SOCと充放電要求パワーPb*との関係を予め定めた第2充放電要求パワー設定用マップからステップS200にて入力した残容量SOCに対応した充放電要求パワーPb*を導出・設定し(ステップS230)、本ルーチンを一旦終了させる。
【0039】
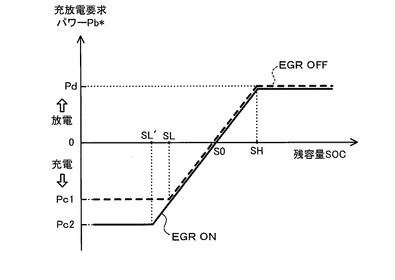
図9は、第1充放電要求パワー設定用マップ(同図における破線参照)と第2充放電要求パワー設定用マップ(同図における実線参照)とを例示する説明図である。同図に示すように、排気再循環の非実行時に用いられる第1充放電要求パワー設定用マップは、残容量SOCが予め定められた制御中心S0(例えば50%)から当該制御中心S0よりも大きい所定値SHまでの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して一定のレート(変化量)で変化する正の値(放電電力)に設定すると共に、残容量SOCが当該所定値SH以上になると充放電要求パワーPb*を一定の放電電力(正の値)Pdに設定するように作成されている。また、第1充放電要求パワー設定用マップは、残容量SOCが制御中心S0から予め定められた強制充電開始値SL(例えば40%)までの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する負の値(充電電力)に設定すると共に、残容量SOCが強制充電開始値SL以下になると充放電要求パワーPb*を一定の第1充電電力(負の値)Pc1に設定するように作成されている。実施例において、第1充電電力Pc1は、ハイブリッド自動車20の走行中に排気再循環が実行されない状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動して当該モータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、上述のパワーPe1を中心とした所定範囲すなわち排気再循環の非実行時にエンジン効率を良好に確保可能とするパワー範囲内にできるだけ含まれるように実験・解析を経て定められる。
【0040】
一方、排気再循環の実行時に用いられる第2充放電要求パワー設定用マップは、残容量SOCが制御中心S0から所定値SHまでの範囲にあるときに第1充放電要求パワー設定用マップと同様に充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する正の値(放電電力)に設定すると共に、残容量SOCが当該所定値SH以上になると第1充放電要求パワー設定用マップと同様に充放電要求パワーPb*を一定の正の値(放電電力)Pdに設定するように作成されている。また、第2充放電要求パワー設定用マップは、残容量SOCが制御中心S0から予め定められた強制充電開始値SL′(SL′<SL)までの範囲にあるときに充放電要求パワーPb*を残容量SOCの変化に対応して上記レートで変化する負の値(充電電力)に設定すると共に、残容量SOCが強制充電開始値SL′以下になると充放電要求パワーPb*を上記第1充電電力Pc1よりも小さい一定の第2充電電力(負の値)Pc2に設定するように作成されている。実施例において、第2充電電力Pc2は、ハイブリッド自動車20の走行中に排気再循環が実行さる(車速Vが上述の中車速域に含まれる)状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動して当該モータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、上述のパワーPe2を中心とした所定範囲すなわち排気再循環の実行時にエンジン効率を良好に確保可能とするパワー範囲内にできるだけ含まれるように実験・解析を経て定められる。
【0041】
上述の第1および第2充放電要求パワー設定用マップを用いた図8の充放電要求パワー設定ルーチンが実行されることにより、実施例のハイブリッド自動車20では、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときに、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときに比べて充放電要求パワーPb*が充電側に増加させられる。従って、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときに、エンジン22に対する要求パワーPe*は、残容量SOCが強制充電開始値SL以下であってバッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときの同一のアクセル開度Acc(および車速V)すなわち要求トルクTr*に対応した要求パワーPe*よりも増加するように設定される(図3のステップS110)。すなわち、運転者によるアクセル開度Acc(および車速V)が同一である場合、バッテリ50の充電が要求されると共に排気再循環が実行されるときの要求パワーPe*(エンジン22の出力パワー)は、バッテリ50の充電が要求されると共に排気再循環が実行されないときの要求パワーPe*よりも大きくなる。そして、エンジン22が要求パワーPe*(および動作ライン)に応じた目標運転ポイント(目標回転数Ne*および目標トルクTe*)で運転されると共に要求トルクTr*に基づくトルクが駆動軸としてのリングギヤ軸32aに出力されるようにエンジン22とモータMG1およびMG2が制御されることになる(図3のステップS120−S170)。
【0042】
これにより、バッテリ50の充電が要求されると共にEGR装置145による排気再循環が実行されないときには、排気再循環が実行されない状態でエンジン効率が最も良くなるときに当該エンジン22から出力されるパワーPe1を中心とした所定範囲内のパワーを出力するようにエンジン22が運転されることになる。また、バッテリ50の充電が要求されると共にEGR装置145による排気再循環が実行されるときには、排気再循環が実行される状態でエンジン効率が最も良くなるときに当該エンジン22から出力されるパワーPe2を中心とした所定範囲内のパワーを出力するようにエンジン22が運転されることになる。この結果、EGR装置145を有するエンジン22の燃費をより向上させ、ひいては当該エンジン22を備えたハイブリッド自動車20におけるエネルギ効率をより向上させることが可能となる。そして、排気再循環の実行時にエンジン22の要求パワーPe*を排気再循環の非実行時に比べて増加させることにより生じるエンジン22の出力パワーの増加分は、モータMG1を発電機として駆動するのに利用可能であり、モータMG1により発電された電力の増加分は、バッテリ50の充電やモータMG2の駆動に供することができる。
【0043】
以上説明したように、実施例のハイブリッド自動車20では、EGR装置145により排気再循環が実行されるときに、同一のアクセル開度Acc(および車速V)に対するエンジン22の出力パワーが排気再循環が実行されないときに比べて増加するように当該エンジン22の要求パワーPe*が設定される。これにより、EGR装置145を有するエンジン22の燃費をより向上させ、ひいては当該エンジン22を備えたハイブリッド自動車20におけるエネルギ効率をより向上させることが可能となる。そして、上述のようなエンジン効率が最も良くなるときにエンジン22から出力されるパワーが排気再循環の非実行時に比べて排気再循環の実行時に高くなる傾向は、EGR率が高く設定されるエンジンや、EGR率が比較的低くても排気再循環の実行時にEGR量が多くなる大排気量エンジンにおいて特に強まる。従って、本発明は、EGR率が高く設定されるエンジンや、EGR装置を有する大排気量エンジンを搭載したハイブリッド自動車に極めて有用である。
【0044】
また、上記実施例では、要求パワーPe*がハイブリッド自動車20の走行に要求される要求走行パワー(=Tr*×Nr)とバッテリ50の充放電要求パワーPb*とに基づいて設定され、バッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されるときには、バッテリ50の充電が要求されると共に排気再循環が実行されないときに比べて充放電要求パワーPb*が充電側に増加させられる。これにより、必要以上に要求パワーPe*を増加させることで却ってエンジン22の燃費を悪化させないようしながら、EGR装置145により排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べてより増加させることが可能となる。ただし、充放電要求パワーPb*を異ならせる代わりに、バッテリ50の充電が要求されると共に排気再循環が実行されるときに、バッテリ50の充電が要求されると共に排気再循環が実行されないときに比べて要求パワーPe*を所定値だけ増加させてもよい。
【0045】
更に、上記実施例では、バッテリ50の充電が要求されると共にEGR装置145により排気再循環が実行されないときには、充放電要求パワーPb*が第1充電電力Pc1に設定されると共に、バッテリ50の充電が要求されると共に排気再循環が実行されるときには、充放電要求パワーPb*が第1充電電力Pc1よりも充電電力として大きい第2充電電力Pc2に設定される。そして、第1充電電力Pc1は、ハイブリッド自動車20の走行中に排気再循環が実行されない状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動してモータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、排気再循環が実行されない状態でエンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe1を中心とした所定範囲内に含まれるように定められる。また、第2充電電力Pc2は、ハイブリッド自動車20の走行中に排気再循環が実行される状態でエンジン22からの動力の少なくとも一部によりモータMG1を発電機として駆動してモータMG1からの電力によりバッテリ50を強制的に充電する際にエンジン22から実際に出力されるパワーが、排気再循環が実行される状態でエンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe2(Pe2>Pe1)を中心とした所定範囲内に含まれるように定められる。これにより、バッテリ50の充電が要求されているときに、排気再循環の有無に拘わらず、エンジン22から実際に出力されるパワーを当該エンジン22の効率が最も良くなるときにエンジン22から出力されるパワーPe1またはPe2に近づけることができるので、エンジン22の燃費をより向上させることが可能となる。また、排気再循環の非実行時と実行時とでエンジン22の目標運転ポイントを設定するための動作ラインを異ならせる必要がなくなるので、動作ラインの適合に要する負担を軽減することが可能となる。
【0046】
なお、上述のようにEGR装置145により排気再循環が実行されるときに要求パワーPe*を排気再循環が実行されないときに比べて増加させる代わりに、EGR装置145により排気再循環が実行されるときにエンジン22の目標回転数Ne*を排気再循環が実行されないときに比べて増加させたり、EGR装置145により排気再循環が実行されるときに要求パワーPe*に基づいて設定されるスロットルバルブ123の目標開度を排気再循環が実行されないときに比べて増加させたりしてもよい。また、上記実施例のハイブリッド自動車20は、モータMG1の回転軸に接続されるサンギヤ31と、駆動輪39a,39bに連結されるリングギヤ軸32aに接続されるリングギヤ32と、エンジン22のクランクシャフト26に接続されるプラネタリキャリア34とを有するプラネタリギヤ30と、リングギヤ32に連結されるモータMG2とを含むものであるが、本発明のハイブリッド車両の構成は、これに限られるものではない。すなわち、プラネタリギヤ30の回転要素に対して上述のようにエンジン22やモータMG1およびMG2を接続する代わりに、プラネタリギヤ30のサンギヤ(第1要素)31にモータMG2の回転軸を接続し、リングギヤ(第2要素)32にモータMG1の回転軸およびエンジン22のクランクシャフト26を接続し、かつプラネタリキャリア(第3要素)34に駆動輪39a,39bに連結される駆動軸を接続してもよい。更に、本発明は、EGR装置145を有するエンジン(内燃機関)22と、エンジン22のクランクシャフト26に接続されたモータMGと、モータMGの回転軸に接続される入力軸61(プライマリシャフト)を有すると共にデファレンシャルギヤ38を介して駆動輪39a,39bに連結される出力軸62とを有する機械式の無段変速機(例えばベルト式CVT)60と、インバータ45を介してモータMGと電力をやり取りするバッテリ50とを備えた図9に示すハイブリッド自動車20Bに適用されてもよい。また、減速ギヤ機構35の代わりに、例えばHi,Loの2段の変速段あるいは3段以上の変速段を有したモータMG2の回転数を変速してリングギヤ軸32aに伝達する変速機を採用してもよい。
【0047】
ここで、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。すなわち、上記実施例では、エンジン22が「内燃機関」に相当し、エンジン22からの動力の少なくとも一部を用いて発電可能なモータMG1,MGが「電動機」に相当し、モータMG1と電力をやり取り可能なバッテリ50が「蓄電手段」に相当し、プラネタリギヤ30が「遊星歯車機構」に相当し、モータMG2が「第2の電動機」に相当し、無段変速機60が「無段変速機」に相当する。
【0048】
ただし、実施例の主要な要素と課題を解決するための手段の欄に記載された発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載された発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。すなわち、実施例はあくまで課題を解決するための手段の欄に記載された発明の具体的な一例に過ぎず、課題を解決するための手段の欄に記載された発明の解釈は、その欄の記載に基づいて行なわれるべきものである。
【0049】
以上、実施例を用いて本発明の実施の形態について説明したが、本発明は上記実施例に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において様々な変更をなし得ることはいうまでもない。
【産業上の利用可能性】
【0050】
本発明は、ハイブリッド車両の製造産業等において利用可能である。
【符号の説明】
【0051】
20,20B ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、26 クランクシャフト、30 プラネタリギヤ、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 プラネタリキャリア、39a,39b 駆動輪、40 モータ用電子制御ユニット(モータECU)、41,42,45 インバータ、50 バッテリ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、60 無段変速機、61 入力軸、62 出力軸、70 ハイブリッド用電子制御ユニット(ハイブリッドECU)、142 EGR管、143 EGR弁、144 温度センサ、145 EGR装置、MG1,MG2 モータ。
【特許請求の範囲】
【請求項1】
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両。
【請求項2】
請求項1に記載のハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、前記内燃機関に出力させるパワーの指令値である要求パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両。
【請求項3】
請求項1または2に記載のハイブリッド車両において、
前記要求パワーは、少なくとも前記ハイブリッド車両の走行に要求される要求走行パワーと前記蓄電装置の目標充放電電力とに基づいて設定され、
前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されるときには、該蓄電装置の充電が要求されると共に該排気再循環が実行されないときに比べて前記目標充放電電力を充電側に増加させることを特徴とするハイブリッド車両。
【請求項4】
請求項3に記載のハイブリッド車両において、
前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されないときには、前記目標充放電電力が第1の充電電力に設定されると共に、該蓄電装置の充電が要求されると共に該排気再循環が実行されるときには、前記目標充放電電力が前記第1の充電電力よりも充電電力として大きい第2の充電電力に設定され、
前記第1の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行されない状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行されない状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められ、
前記第2の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行される状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行される状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められることを特徴とするハイブリッド車両。
【請求項5】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機の回転軸に接続される第1要素と、駆動輪に連結される駆動軸に接続される第2要素と、前記内燃機関の出力軸に接続される第3要素とを有する遊星歯車機構と、
前記第2要素に連結される第2の電動機とを更に備えることを特徴とするハイブリッド車両。
【請求項6】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機とは異なる第2の電動機の回転軸に接続される第1要素と、前記電動機の回転軸および前記内燃機関の出力軸に接続される第2要素と、駆動輪に連結される駆動軸に接続される第3要素とを有する遊星歯車機構を更に備えることを特徴とするハイブリッド車両。
【請求項7】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機の回転軸の一端は、前記内燃機関の出力軸に接続されており、
前記電動機の前記回転軸の他端に接続される入力軸と、駆動輪に連結される出力軸とを有する無段変速機を更に備えることを特徴とするハイブリッド車両。
【請求項8】
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両の制御方法において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両の制御方法。
【請求項1】
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両。
【請求項2】
請求項1に記載のハイブリッド車両において、
前記排気再循環装置により排気再循環が実行されるときに、前記内燃機関に出力させるパワーの指令値である要求パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両。
【請求項3】
請求項1または2に記載のハイブリッド車両において、
前記要求パワーは、少なくとも前記ハイブリッド車両の走行に要求される要求走行パワーと前記蓄電装置の目標充放電電力とに基づいて設定され、
前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されるときには、該蓄電装置の充電が要求されると共に該排気再循環が実行されないときに比べて前記目標充放電電力を充電側に増加させることを特徴とするハイブリッド車両。
【請求項4】
請求項3に記載のハイブリッド車両において、
前記蓄電装置の充電が要求されると共に前記排気再循環装置により排気再循環が実行されないときには、前記目標充放電電力が第1の充電電力に設定されると共に、該蓄電装置の充電が要求されると共に該排気再循環が実行されるときには、前記目標充放電電力が前記第1の充電電力よりも充電電力として大きい第2の充電電力に設定され、
前記第1の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行されない状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行されない状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められ、
前記第2の充電電力は、前記ハイブリッド車両の走行中に前記排気再循環が実行される状態で前記内燃機関からの動力の少なくとも一部により前記電動機を発電機として駆動して該電動機からの電力により前記蓄電装置を強制的に充電する際に該内燃機関から実際に出力されるパワーが、前記排気再循環が実行される状態で前記内燃機関の効率が最も良くなるときに該内燃機関から出力されるパワーを中心とした所定範囲内に含まれるように定められることを特徴とするハイブリッド車両。
【請求項5】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機の回転軸に接続される第1要素と、駆動輪に連結される駆動軸に接続される第2要素と、前記内燃機関の出力軸に接続される第3要素とを有する遊星歯車機構と、
前記第2要素に連結される第2の電動機とを更に備えることを特徴とするハイブリッド車両。
【請求項6】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機とは異なる第2の電動機の回転軸に接続される第1要素と、前記電動機の回転軸および前記内燃機関の出力軸に接続される第2要素と、駆動輪に連結される駆動軸に接続される第3要素とを有する遊星歯車機構を更に備えることを特徴とするハイブリッド車両。
【請求項7】
請求項1から4の何れか一項に記載のハイブリッド車両において、
前記電動機の回転軸の一端は、前記内燃機関の出力軸に接続されており、
前記電動機の前記回転軸の他端に接続される入力軸と、駆動輪に連結される出力軸とを有する無段変速機を更に備えることを特徴とするハイブリッド車両。
【請求項8】
排気再循環装置を有する内燃機関と、前記内燃機関からの動力の少なくとも一部を用いて発電可能な電動機と、前記電動機と電力をやり取り可能な蓄電装置とを備え、運転者による駆動力要求量に応じて前記内燃機関と前記電動機とを制御するハイブリッド車両の制御方法において、
前記排気再循環装置により排気再循環が実行されるときに、同一の駆動力要求量に対する前記内燃機関の出力パワーを該排気再循環が実行されないときに比べて増加させることを特徴とするハイブリッド車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−153167(P2012−153167A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11296(P2011−11296)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]