
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両の駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御する。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
【解決手段】HVECU70は、SMR55をオフするバッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、MG1およびMG2が電力制御トルクを出力したときと、出力しないときとの間での駆動軸32aに出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して駆動トルクの上下限範囲を定める。MG1およびMG2のトルク指令値は、当該上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように設定される。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ハイブリッド車両およびその制御方法に関し、より特定的には、車載蓄電装置を不使用とした走行モードを有するハイブリッド車両の走行制御に関する。
【背景技術】
【0002】
近年、環境に配慮した自動車として、走行用電動機および内燃機関を搭載したハイブリッド車両が注目されている。ハイブリッド車両の駆動系の一態様として、エンジンと、電動機と、発電機とが、プラネタリギヤで構成された動力分割機構を介して機械的に連結されたものが知られている。
【0003】
特開2007−137373号公報(特許文献1)および特開2008−279978号公報(特許文献2)には、このような駆動系を有するハイブリッド車両において、車載蓄電装置の充放電が禁止されている状態で、バッテリを電気システムから切離して走行(以下、バッテリレス走行とも称する)する場合における走行制御が記載されている。
【0004】
特許文献1には、バッテリレス走行の際に、エンジンが目標回転数で回転するようにエンジントルクを設定するフィードバック制御を行うとともに、要求トルクが駆動軸に作用するようにインバータを制御することが記載されている。そして、エンジンの目標回転数と現在の回転数との差が小さいときには、コンデンサ電圧を目標電圧に一致させるためのフィードバック制御に基づいて、電動機および発電機の出力トルクを設定することが記載されている。また、特許文献2には、バッテリレス走行時におけるリレー溶着判定が記載される。
【0005】
特開2009−045946号公報(特許文献3)には、主駆動輪を駆動する内燃機関と、内燃機関で駆動される発電機と、従駆動輪を駆動可能なモータとを備えるハイブリッド車両において、車両がロールバックまたはロールフォワード状態では、アクセルペダルが踏まれる前であっても、モータの回生電圧がモータの損失を超えない範囲のモータ回転数に、モータを制御することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−137373号公報
【特許文献2】特開2008−279978号公報
【特許文献3】特開2009−045946号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1〜3に記載されるように、発電機と電動機とを備えたハイブリッド車両のバッテリレス走行では、発電機の発電電力と電動機の消費電力との均衡によって、電気システム内に過電圧が発生することを回避する必要がある。したがって、特許文献1に記載されるように、電力制御を考慮して、発電機および電動機の出力トルクを設定することが好ましい。
【0008】
しかしながら、電力制御のために発電機および電動機の出力トルクを変化させると、駆動軸に作用する駆動トルク(すなわち、車両駆動力)の出力可能範囲も変化する。これにより、駆動トルクが大きく変化することによって車両走行性に影響を与える虞がある。
【0009】
この発明はこのような問題点を解決するためになされたものであって、この発明の目的は、ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御することである。
【課題を解決するための手段】
【0010】
この発明のある局面によれば、ハイブリッド車両は、内燃機関と、発電機と、電動機と、蓄電装置と、第1および第2の電力変換器と、走行制御部とを備える。内燃機関は、駆動軸との間に動力伝達経路を有するように構成される。発電機は、内燃機関の動力の少なくとも一部を用いて発電するように構成される。電動機は、駆動軸との間に動力伝達経路を有するように構成される。蓄電装置は、電力線に対して、開閉器を介して電気的に接続される。第1の電力変換器は、発電機の出力トルクが第1のトルク指令値と一致するように、電力線および発電機の間で双方向の電力変換を実行するように構成される。第2の電力変換器は、電動機の出力トルクが第2のトルク指令値と一致するように、電力線および電動機の間で双方向の電力変換を実行するように構成される。走行制御部は、開閉器が開放された走行状態において、車両走行のための要求トルクに応じて、発電機および電動機の出力トルクを設定する。特に、走行制御部は、駆動軸に作用するトルクに影響を与えずに、電力線の電圧を電圧指令値を一致させるように電力線の電力変化量を制御するための電動機および発電機による電力制御トルクを算出する。さらに、走行制御部は、電動機および発電機が電力制御トルクを出力したときと、電動機および発電機が電力制御トルクを出力しないときとの間での駆動軸に出力可能なトルク範囲の差分を算出する。そして、走行制御部は、当該差分の時間軸に対する変化量を制約した値を反映して決定された駆動軸のトルク上下限範囲内で要求トルクに最も近いトルクが駆動軸に作用するように、第1および第2のトルク指令値を設定する。
【0011】
好ましくは、走行制御部は、電力指令算出部と、第1のトルク算出部と、第1および第2のトルク上下限設定部と、レート処理部と、駆動トルク設定部とを含む。電力指令算出部は、電力線の電圧を電圧指令値に制御するための電力線の入出力電力の指令値を算出するように構成される。第1のトルク算出部は、駆動軸に作用するトルクに影響を与えずに、発電機および電動機から電力線に対して指令値に従った電力を入出力するための、発電機の電力制御トルクおよび電動機の電力制御トルクを演算するように構成される。第1のトルク上下限設定部は、発電機および電動機の第1のトルク上下限範囲に基づいて、駆動軸に出力可能な第1のトルク範囲を設定するように構成される。第2のトルク上下限設定部は、第1のトルク上下限範囲から電動機および発電機の電力制御トルクが減算された、発電機および電動機の第2のトルク上下限範囲に基づいて、駆動軸に出力可能な第2のトルク範囲を設定するように構成される。レート処理部は、第1および第2のトルク範囲の差分の時間軸方向の変化を制約したトルク値と、第1のトルク範囲とに基づいて、駆動軸のトルク上下限範囲を算出するように構成される。駆動トルク設定部は、設定された駆動軸のトルク上下限範囲と、車両走行のための要求トルクとに基づいて、駆動軸のトルク指令値を設定するように構成される。
【0012】
さらに好ましくは、走行制御部は、第2のトルク算出部と、トルク設定部とをさらに含む。第2のトルク算出部は、電力線に対する入出力電力を変えずに駆動軸のトルク指令値を駆動軸に作用させるための、発電機の駆動力トルクおよび電動機の駆動力トルクを演算するように構成される。トルク設定部は、発電機および電動機のそれぞれの電力制御トルクおよび駆動力トルクの和に従って、第1および第2のトルク指令値を設定するように構成される。
【0013】
また好ましくは、ハイブリッド車両は、第1から第3の回転要素のうちのいずれか2つの回転要素の回転数が決定されると残余の1つの回転要素の回転数が決定されるとともに、第1から第3の回転要素のうちのいずれか2つの回転要素に入出力される動力に基づいて残余の1つの回転要素に動力を入出力するように構成される差動装置をさらに備える。第1の回転要素は、内燃機関の出力軸と機械的に連結される。第2の回転要素は、発電機の出力軸と機械的に連結される。第3の回転要素は、駆動軸および電動機の出力軸と機械的に連結される。
【0014】
また好ましくは、走行制御部は、トルク範囲の差分の時間軸に対する変化量を、駆動軸に出力可能なトルクの増加方向に対応する当該差分の変化方向に限って制約する処理によって得られた値を反映して、駆動軸のトルク上下限範囲を決定する。
【0015】
この発明の他の局面によれば、ハイブリッド車両の制御方法であって、ハイブリッド車両は、駆動軸との間に動力伝達経路を有するように構成された内燃機関と、内燃機関の動力の少なくとも一部を用いて発電するための発電機と、駆動軸との間に動力伝達経路を有するように構成された電動機と、電力線に対して開閉器を介して電気的に接続される蓄電装置と、発電機の出力トルクが第1のトルク指令値と一致するように、電力線および発電機の間で双方向の電力変換を実行するための第1の電力変換器と、電動機の出力トルクが第2のトルク指令値と一致するように、電力線および電動機の間で双方向の電力変換を実行するための第2の電力変換器と電動機および発電機の双方と電気的に接続された電力線に対して開閉器を介して電気的に接続される蓄電装置とを備える。制御方法は、走行中に蓄電装置の異常が検知された場合に、開閉器を開放するステップと、駆動軸に作用するトルクに影響を与えずに、電力線の電圧を電圧指令値を一致させるように電力線の電力変化量を制御するための電動機および発電機による電力制御トルクを演算するステップと、電動機および発電機が電力制御トルクを出力したときと、電動機および発電機が電力制御トルクを出力しないときとの間での駆動軸に出力可能なトルク範囲の差分を算出するステップと、当該差分の時間軸に対する変化量を制約した値を反映して駆動軸のトルク上下限範囲を決定するステップと、決定されたトルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸に発生するように、第1および第2のトルク指令値を設定するステップとを備える。
【0016】
好ましくは、算出するステップは、発電機および電動機の第1のトルク上下限範囲に基づいて、駆動軸に出力可能な第1のトルク範囲を設定するステップと、第1のトルク上下限範囲から電動機および発電機の電力制御トルクが減算された、発電機および電動機の第2のトルク上下限範囲に基づいて、駆動軸に出力可能な第2のトルク範囲を設定するステップと、第1および第2のトルク範囲の差分を算出するステップとを含む。そして、決定するステップは、算出された差分の時間軸方向の変化を制約したトルク値を算出するステップと、トルク値と第1のトルク範囲とに基づいて、駆動軸のトルク上下限範囲を算出するステップとを含む。
【0017】
さらに好ましくは、演算するステップは、電圧を電圧指令値に制御するための電力線の入出力電力の指令値を演算するステップと、駆動軸に作用するトルクに影響を与えずに、電力線に対して指令値に従った電力を入出力するための、発電機の電力制御トルクおよび電動機の電力制御トルクを演算するステップとを含む。
【0018】
あるいは、さらに好ましくは、設定するステップは、設定された駆動軸のトルク上下限範囲と要求トルクとに基づいて、駆動軸のトルク指令値を設定するステップと、電力線に対する入出力電力を変えずに駆動軸のトルク指令値を駆動軸に作用させるための、発電機の駆動力トルクおよび電動機の駆動力トルクを演算するステップと、発電機および電動機のそれぞれの電力制御トルクおよび駆動力トルクの和に従って、第1および第2のトルク指令値を設定するステップとを含む。
【0019】
また好ましくは、決定するステップは、トルク範囲の差分の時間軸に対する変化量を、駆動軸に出力可能なトルクの増加方向に対応する当該差分の変化方向に限って制約する処理によって得られた値を反映して、駆動軸のトルク上下限範囲を決定する。
【発明の効果】
【0020】
この発明によれば、ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態によるハイブリッド車両の概略構成図である。
【図2】図1に示したモータジェネレータを駆動制御するための電気システムの回路図である。
【図3】図1に示したハイブリッド車両の走行時における共線図である。
【図4】本発明の実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御のための機能ブロック図である。
【図5】図4に示した駆動トルク上下限設定部の詳細な機能ブロック図である。
【図6】システム電圧とトルク上限値との関係を示す概念図である。
【図7】本発明の実施の形態によるバッテリレス走行制御の制御処理を示すフローチャートである。
【図8】図7に示した駆動トルク上下限値を算出するステップの詳細な制御処理を示すフローチャートである。
【図9】駆動トルクの上下限範囲の設定手法を説明する概念図である。
【図10】本発明の実施の形態によるバッテリレス走行制御による駆動トルクの設定例を説明する動作波形図である。
【発明を実施するための形態】
【0022】
以下に、本発明の実施の形態について図面を参照して詳細に説明する。なお、以下図中の同一または相当部分には同一符号を付してその説明は原則的に繰返さないものとする。
【0023】
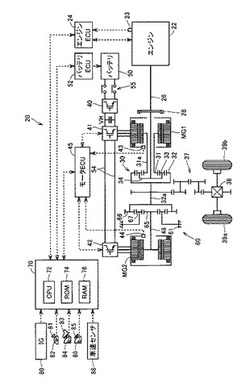
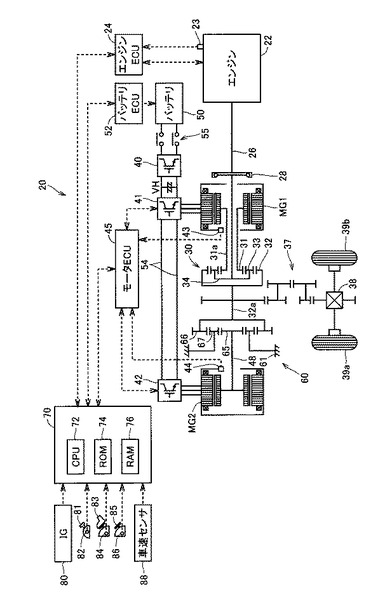
図1は、本発明の実施の形態によるハイブリッド車両の概略構成図である。
図1を参照して、本実施の形態によるハイブリッド車両20は、エンジン22と、エンジン22の出力軸としてのクランクシャフト26と、トーショナルダンパ28と、3軸式の動力分割機構30と、バッテリ50とを備える。クランクシャフト26は、トーショナルダンパ28を介して、動力分割機構30に連結される。
【0024】
ハイブリッド車両20は、さらに、モータジェネレータMG1,MG2(以下、単に、MG1,MG2と称する)と、変速機60と、ハイブリッド車両20の駆動系全体をコントロールするハイブリッド用電子制御ユニット(以下、「HVECU」とも称する)70とを備える。
【0025】
MG2は、変速機60を介して動力分割機構30に連結される。MG1,MG2の各々は、正トルクおよび負トルクの両方を出力可能であり、電動機として駆動できるとともに発電機としても駆動することができる。
【0026】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する「内燃機関」である。エンジン用電子制御ユニット(以下、「エンジンECU」とも称する)24は、クランク角センサ23からのクランクシャフト26のクランク角度等、エンジン22の運転状態を検出する各種センサから信号を入力される。エンジンECU24は、HVECU70と通信しており、HVECU70からエンジン22の制御指令を受ける。エンジンECU24は、各種センサからの信号に基づくエンジン22の運転状態に基づいて、HVECU70からの制御指令に従ってエンジン22が作動するように、エンジン22の燃料噴射制御や点火制御、吸入空気量制御などのエンジン制御を実行する。さらに、エンジンECU24は、必要に応じて、エンジン22の運転状態に関するデータをHVECU70に出力する。
【0027】
動力分割機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合するとともにリングギヤ32に噛合する複数のピニオンギヤ33と、キャリア34とを含む。キャリア34は、複数のピニオンギヤ33を自転かつ公転自在に保持するように構成される。動力分割機構30は、サンギヤ31、リングギヤ32、およびキャリア34を回転要素として差動作用を行なう遊星歯車機構として構成されている。
【0028】
キャリア34にはエンジン22のクランクシャフト26が連結され、サンギヤ31には、サンギヤ軸31aを介してMG1の出力軸が連結される。「駆動軸」としてのリングギヤ軸32aは、リングギヤ32の回転に伴って回転する。リングギヤ軸32aには、変速機60を介してMG2の出力軸が連結される。以下では、リングギヤ軸32aを、駆動軸32aとも称する。
【0029】
駆動軸32aは、ギヤ機構37およびデファレンシャルギヤ38を介して駆動輪39a,39bに機械的に連結されている。したがって、動力分割機構30によりリングギヤ32、すなわち、駆動軸32aに出力された動力は、ギヤ機構37,デファレンシャルギヤ38を介して駆動輪39a,39bに出力されることになる。
【0030】
このように、動力分割機構30は「差動装置」に対応する。また、キャリア34は「第1の回転要素」に対応し、サンギヤ31は「第2の回転要素」に対応し、リングギヤ32は「第3の回転要素」に対応する。
【0031】
変速機60は、MG2の出力軸48と駆動軸32aとの間に所定の減速比Grを与えるように構成される。変速機60は、代表的には、遊星歯車機構により構成される。変速機60は、外歯歯車のサンギヤ65と、このサンギヤ65と同心円上に配置された内歯歯車のリングギヤ66と、サンギヤ65に噛合するとともにリングギヤ66に噛合する複数のピニオンギヤ67とを含む。プラネタリキャリアは、ケース61に固定されるので、複数のピニオンギヤ67は、公転することなく、自転のみを行なう。すなわち、サンギヤ65およびリングギヤ66の回転速度の比(減速比)が固定される。
【0032】
なお、変速機60の構成は図1の例に限定されるものではない。また、変速機60を介することなく、MG2の出力軸およびリングギヤ軸(駆動軸)32aが連結される構成としてもよい。
【0033】
MG1が発電機として機能するときには、キャリア34から入力されるエンジン22からの動力が、サンギヤ31側およびリングギヤ32側にそのギヤ比に応じて分配される。一方、MG1が電動機として機能するときには、キャリア34から入力されるエンジン22からの動力と、サンギヤ31から入力されるMG1からの動力とが統合されて、リングギヤ32に出力される。
【0034】
MG1,MG2は、代表的には、三相の永久磁石型同期電動機により構成される。MG1,MG2は、コンバータ40およびインバータ41,42を介して,バッテリ50との間で電力のやりとりを行なう。インバータ41,42の各々は、複数個のスイッチング素子を有する一般的な三相インバータによって構成される。
【0035】
バッテリ50は、「蓄電装置」の代表例として示される。バッテリ50には、代表的には、リチウムイオン二次電池やニッケル水素二次電池が適用される。ただし、バッテリ50に代えて、電気二重層キャパシタ等の他の蓄電装置、あるいは、二次電池と他の蓄電装置とを組み合わせたものを用いてもよい。
【0036】
バッテリ50は、バッテリ用電子制御ユニット(以下、「バッテリECU」とも称する)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号が入力される。たとえば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧、図示しない電流センサからのバッテリ50の充放電電流,バッテリ50に取り付けられた図示しない温度センサからの電池温度などが、バッテリECU52に入力される。バッテリECU52は、必要に応じて、バッテリ50の状態に関するデータを通信によりHVECU70に出力する。なお、バッテリECU52では、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC:State of Charge)も演算している。
【0037】
バッテリ50と、SMR(System Main Relay)55と、コンバータ40と、インバータ41,42とによって、ハイブリッド車両20の電気システムが構成される。SMR55は、バッテリ50とコンバータ40との間に配置される。
【0038】
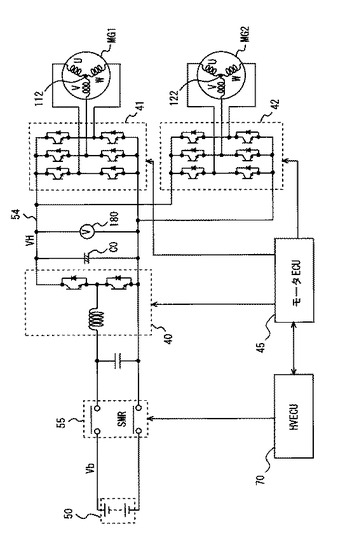
図2は、図1に示したMG1,MG2を駆動制御するための電気システムの回路図である。
【0039】
図2を参照して、SMR55がオフ状態であると、バッテリ50は電気システムから切離される。SMR55がオン状態であると、バッテリ50が電気システムに接続される。SMR55は、HVECU70からの制御信号に応答してオンオフされる。たとえば、イグニッションスイッチ80がオンされた状態で、ユーザが運転開始のための操作を行うことによって、電気システムの起動が指示される。電気システムの起動が指示されると、HVECU70は、SMR55をオンする。
【0040】
コンバータ40は、リアクトルおよび2つの電力用半導体スイッチング素子(以下、単にスイッチング素子とも称する)によって構成される、一般的な昇圧チョッパ回路の構成を有する。電力用半導体スイッチング素子としては、バイポーラトランジスタや、パワーMOSFET(Metal Oxide Semiconductor Field-Effect Transistor)、あるいは、IGBT(Insulated Gate Bipolar Transistor)等を用いることができる。各スイッチング素子には、逆並列ダイオードが接続される。
【0041】
MG1と接続されたインバータ41は、U相アーム、V相アームおよびW相アームを含む。U相アーム、V相アームおよびW相アームは並列に接続される。U相アーム、V相アームおよびW相アームは、それぞれ、直列に接続された2つスイッチング素子を有する。各スイッチング素子には逆並列ダイオードが設けられている。
【0042】
MG1の図示しない固定子に巻回された各相コイル(U、V,W)は、中性点112において交互に接続される。インバータ41の各相アームにおけるスイッチング素子の接続点は、MG1の各相コイルの端部にそれぞれ接続される。
【0043】
インバータ42は、インバータ41と同様に、一般的な三相インバータの構成を有する。MG2の図示しない固定子に巻回された各相コイル(U、V,W)は、中性点122において交互に接続される。インバータ42の各相アームにおけるスイッチング素子の接続点は、MG2の各相コイルの端部にそれぞれ接続される。
【0044】
バッテリ50から放電された電力をMG1もしくはMG2に供給する際、電圧がコンバータ40により昇圧される。逆に、MG1もしくはMG2により発電された電力をバッテリ50に充電する際、電圧がコンバータ40により降圧される。
【0045】
コンバータ40とインバータ41および42との間の電力線54上の直流電圧であるシステム電圧VHは、電圧センサ180により検出される。電圧センサ180の検出結果は、モータECU45に送信される。
【0046】
コンバータ40は、システム電圧VHと、バッテリ50の電圧Vbとの間で、双方向の直流電圧変換を実行する。コンバータ40のスイッチング素子のデューティは、電力線54のシステム電圧VHが電圧指令値VHrに合致するように制御される。
【0047】
インバータ41は、電力線54上の直流電圧をスイッチング素子のオンオフにより交流電圧に変換する。変換された交流電圧は、MG1に供給される。また、インバータ41は、MG1が回生発電によって発生した交流電力を直流電力に変換する。
【0048】
同様に、インバータ42は、電力線54上の直流電圧を交流電圧に変換して、MG2に供給する。また、インバータ42は、MG2が回生発電によって発生した交流電力を直流電力に変換する。
【0049】
このように、コンバータ40とインバータ41,42とを電気的に接続する電力線54は、各インバータ41,42が共用する正極母線および負極母線として構成される。電力線54は、MG1およびMG2の双方と電気的に接続されるので、MG1,MG2の一方で発電される電力を他方で消費することができる。したがって、バッテリ50は、MG1,MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、MG1,MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。
【0050】
MG1,MG2は、いずれもモータ用電子制御ユニット(以下、「モータECU」とも称する)45により駆動制御される。モータECU45には、MG1,MG2を駆動制御するために必要な信号が入力される。たとえば、MG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるMG1,MG2に印加される相電流などが、モータECU45へ入力される。回転位置検出センサ43,44からの信号に基づいて、MG1,MG2の回転速度が検出できる。
【0051】
モータECU45は、HVECU70と通信しており、HVECU70からの動作指令に従って、MG1,MG2を駆動制御する。具体的には、モータECU45は、MG1およびMG2の出力トルクが、トルク指令値Tr1およびTr2に合致するように、インバータ41,42へのスイッチング制御信号を出力する。たとえば、モータECU45は、トルク指令値Tr1,Tr2に従って設定される電流指令値と、MG1,MG2の電流検出値との偏差に基づいて、インバータ41,42の出力電圧指令(交流電圧)を演算する。そして、インバータ41,42のスイッチング制御信号は、たとえばパルス幅変調制御に従って、インバータ41,42が出力する擬似交流電圧が、それぞれの出力電圧指令に近づくように生成される。インバータ41は「第1の電力変換器」に対応し、インバータ42は「第2の電力変換器」に対応する。
【0052】
再び図1を参照して、HVECU70は、CPU(Central Processing Unit)72を中心とするマイクロプロセッサとして構成される。HVECU70は、CPU72と、処理プログラムやマップ等を記憶するROM(Read Only Memory)74と、データを一時的に記憶するRAM(Random Access Memory)76と、図示しない入出力ポートおよび通信ポートとを含む。HVECU70には、イグニッションスイッチ80からのイグニッション信号、シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP、車速センサ88からの車速Vなどが入力ポートを介して入力されている。
【0053】
また、HVECU70は、上述のように、エンジンECU24、モータECU45および、バッテリECU52と、通信ポートを介して接続されている。これにより、HVECU70は、他のECUとの間で各種制御信号やデータのやりとりを行なっている。なお、エンジンECU24、モータECU45および、バッテリECU52についても、HVECU70と同様に、マイクロプロセッサによって構成できる。また、図1では、HVECU70、エンジンECU24、モータECU45および、バッテリECU52を別個のECUとして記載したが、これらの機能の一部または全部を統合したECUを配置することも可能である。あるいは、図示された各ECUの機能をさらに分割するように、ECUを配置してもよい。
【0054】
HVECU70は、車両状態に適した走行を行なうための走行制御を実行する。たとえば、車両発進時および低速走行時には、エンジン22を停止した状態で、MG2の出力によってハイブリッド車両20は走行する。定常走行時には、エンジン22を始動して、エンジン22およびMG2の出力によってハイブリッド車両20は走行する。特に、エンジン22を高効率の動作点で動作させることによって、ハイブリッド車両20の燃費が向上する。
【0055】
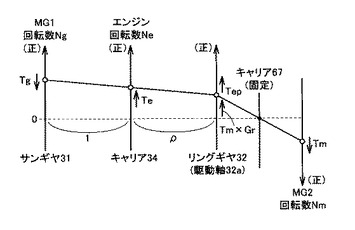
エンジン22、MG1およびMG2が動力分割機構30を介して連結されることで、エンジン22、MG1およびMG2の回転数は、図3に示すように共線図で結ばれる関係になる。
【0056】
図3を参照して、走行時には、MG2は主に「電動機」として動作し、MG1は主に「発電機」として動作する。以下では、MG2のトルクおよび回転数をTmおよびNmとも表記し、MG1のトルクおよび回転数をTgおよびNgとも表記する。
【0057】
エンジン22は、エンジン要求パワーに基づいて定められた動作点(エンジン回転数NeおよびエンジントルクTe)で動作するように、エンジンECU24(図1)によって制御される。
【0058】
MG1のトルクTgおよび回転数Ngは、エンジン回転数Neを上記動作点に従った目標回転数とするように制御される。上述のように、通常走行時には、MG1は負トルク(Tg<0)を出力し、発電する状態となる。
【0059】
このとき、エンジントルクTeの反力を受け持つように出力されたトルクTgによって、駆動軸32aに伝達される直達トルクTepは、Tep=−Tg×(1/ρ)で示される。なおρは、動力分割機構30におけるギヤ比である。
【0060】
一方、変速機60のギヤ比(減速比)Grを用いて、MG2のトルクTmによって駆動軸32aに発生するトルクは、Tm×Grで示される。したがって、駆動軸32a(リングギヤ32)に作用する駆動トルクTpについて、下記(1)式が成立する。
【0061】
Tp=Tm×Gr−Tg×(1/ρ) …(1)
ハイブリッド車両20では、バッテリ50に異常が発生して充放電が禁止されると、SMR55をオフ状態として、バッテリ50を電気システムから切り離した状態で、図3に示した共線図に従って走行を継続する。以下では、バッテリ50を不使用とした走行を「バッテリレス走行」と称し、バッテリレス走行時の走行制御について、「バッテリレス走行制御」と称する。
【0062】
バッテリレス走行時には、バッテリ50を電力バッファとして使用することができない。このため、MG1およびMG2全体での入出力電力ΔPが、そのまま電力線54(平滑コンデンサC0)に対して入出力される。ΔPは、下記(2)式で示される。ΔP<0のときに、MG1,MG2から電力線54へ電力が供給され、ΔP>0のときに、電力線54からMG1,MG2へ電力が供給される。
【0063】
ΔP=Tm×Nm+Tg×Ng …(2)
バッテリレス走行時には、電力線54のシステム電圧VHが、P=(1/2)×C×VH×VHの関係に従って、入出力電力ΔPに応じて変化する。なお、平滑コンデンサC0のキャパシタンスをCとする。したがって、ΔPによる電圧変化ΔVHは、下記(3)式によって示される。MG2の消費電力よりもMG1の発電電力の方が大きいΔP<0のときには、ΔVH>0であり、システム電圧VHが上昇する。
【0064】
ΔP=−(C/2)×2×VH×ΔVH
=−C×VH×ΔVH …(3)
システム電圧VHが変動すると、MG1,MG2のトルク変動に繋がるため、コンバータ40が使用できないバッテリレス走行時でも、システム電圧VHは電圧指令値VHrに制御されることが好ましい。
【0065】
したがって、本実施の形態では、バッテリレス走行時には、MG1およびMG2全体の入出力電力ΔP(すなわち、電力線54の入出力電力)の調整によってシステム電圧VHを制御するように、MG1,MG2の出力トルクによる電力制御を実行する。一方で、電力制御の影響によって出力可能な駆動トルクが急激に変化すると、駆動トルクの変化によって車両走行性が低下することが懸念される。
【0066】
このため、本発明の実施の形態では、以下に説明するようなバッテリレス走行制御により、システム電圧VHの制御のための電力制御性と、駆動力の変動抑制とが両立するように、MG1,MG2の出力トルクを設定する。
【0067】
図4および図5には、本発明の実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御のための機能ブロック図が示される。図4および図5に示す各機能ブロックは、HVECU70によるハードウェア処理および/またはソフトウェア処理によって実現することができる。
【0068】
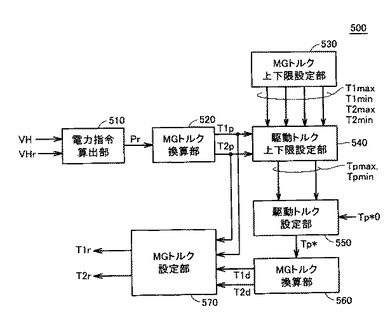
図4を参照して、バッテリレス走行制御部500は、バッテリレス走行時にMG1,MG2のトルク指令値Tr1,Tr2を設定する。バッテリレス走行制御部500は、電力指令算出部510と、MGトルク換算部520と、MGトルク上下限設定部530と、駆動トルク上下限設定部540と、駆動トルク設定部550と、MGトルク換算部560と、MGトルク設定部570とを含む。
【0069】
電力指令算出部510は、システム電圧VHと、システム電圧の電圧指令値VHrとに基づいて、電力補正指令値ΔPrおよびこのΔPrを含む電力指令値Prを算出する。電力補正指令値ΔPrは、システム電圧VHを電圧指令値VHrに近付けるための、電力線54の入出力電力の変化量を示す。電力補正指令値ΔPrは、電力線54の電力が不足しているときには負値(ΔPr<0)に設定され、電力線54の電力が過剰なときには正値(ΔPr>0)に設定される。
【0070】
MGトルク換算部520は、電力指令値Prに従った電力変化量を電力線54に生じさせるための、MG1,MG2の必要トルク(以下、電力制御トルクとも称する)T1p,T2pを演算する。MGトルク換算部520は、「第1のトルク算出部」に対応する。
【0071】
MGトルク上下限設定部530は、当該制御周期における、MG1のトルク上限値T1maxおよびトルク下限値T1minと、MG2のトルク上限値T2maxおよびトルク下限値T2minとを設定する。
【0072】
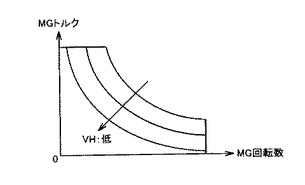
トルク上限値は、たとえば、図6に示されるように、当該制御周期におけるシステム電圧およびモータジェネレータの回転数によって決まる。
【0073】
図6を参照して、MG1,MG2の各々が出力可能な上限トルクは、MG回転数およびシステム電圧に応じて変化する。同一のMG回転数の下では、システム電圧VHが低い程、出力可能な上限トルクが低下する。一方で、同一のシステム電圧下では、回転数が高くなる程、出力可能な上限トルクが低下する。
【0074】
トルクおよび/または回転数が負の範囲でも、MGトルクの絶対値と、MG回転数の絶対値と、システム電圧VHとの間には、上記と同様の関係が成立する。したがって、各制御周期において、システム電圧VHおよび回転数(Ng,Ne)に照らして、トルク上限値T1max,T2maxおよび/またはトルク下限値T1min,T2minを設定できる。
【0075】
あるいは、回転要素の過高回転やMG1,MG2の過高温等からの部品・機器保護の観点から、トルク(絶対値)の増大を制限するために、トルク上限値T1max,T2maxおよび/またはトルク下限値T1min,T2minが設定されてもよい。
【0076】
また、急峻なトルク変動を抑制するために、前回の制御周期における出力トルクからの変化量を所定値以下に制限するように、MG1のトルク上下限値T1max,T1minおよびMG2のトルク上下限値T2max,T2minが設定されてもよい。
【0077】
MGトルク上下限設定部530は、上記のような観点を総合して、各制御周期において、当該制御周期でのトルク上限値T1max,T2maxおよびトルク下限値T1min,T2minを設定する。
【0078】
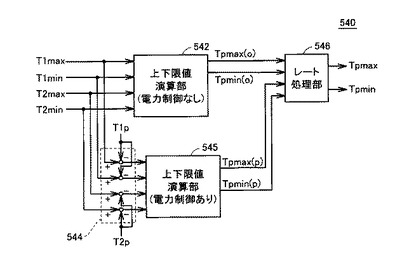
再び図4を参照して、駆動トルク上下限設定部540は、MGトルク上下限設定部530によって設定されたMGトルクの上下限範囲と、MGトルク換算部520によって設定された電力制御トルクT1p,T2pとに基づいて、駆動トルクTpの上下限範囲を設定する。具体的には、駆動トルク上下限設定部540は、図5に示す機能ブロック図に従って、駆動トルク上限値Tpmaxおよび駆動トルク下限値Tpminを算出する。
【0079】
図5を参照して、駆動トルク上下限設定部540は、上下限値演算部542,544と、レート処理部546とを含む。
【0080】
駆動トルク上下限設定部542は、電力制御なしのときに出力可能な駆動トルクTpの範囲を算出する。すなわち、駆動トルク上下限設定部542は、トルク上限値T1max,T2maxおよびトルク下限値T1min,T2minに基づいて、駆動トルク上限値Tpmax(o)および駆動トルク下限値Tpmin(o)を算出する。
【0081】
駆動トルク上下限設定部545は、電力制御ありのときに出力可能な駆動トルクTpの範囲を算出する。すなわち、駆動トルク上下限設定部545は、MG1およびMG2による電力制御トルクT1p,T2pを確保した上で、MG1,MG2の出力トルクをMGトルク上下限設定部530による上下限範囲内としたときにおける、駆動トルクTpの上下限値を算出する。具体的には、トルク上下限値T1max,T1minから電力制御トルクT1pを減算した上下限値と、トルク上下限値T2max,T2minから電力制御トルクT2pを減算した上下限値に基づいて、駆動トルク上限値Tpmax(p)および駆動トルク下限値Tpmin(p)を算出する。
【0082】
レート処理部546は、駆動トルク上限値Tpmax(p)およびTpmax(o)の差分ΔTp(ΔTp=Tpmax(o)−Tpmax(p))を算出する。トルク差分ΔTpは、電力制御を実行することによる駆動トルクTpの低下量に相当する。そして、レート処理部546は、トルク差分ΔTpについて時間軸に対する変化量を抑制するレート処理を実行するとともに、レート処理されたトルク差分ΔTp*に基づいて、駆動トルク上限値TpmaxおよびTpminを算出する。レート処理については、ΔTpの増加側および減少側の両方で実行することが可能であるが、トルク振動を抑制する観点からは、特に、駆動トルクの増加時、すなわち、ΔTpの減少側(ΔTp*前回値<ΔTp今回値)のときに限定して、レート処理を実行することが好ましい。
【0083】
再び図4を参照して、駆動トルク設定部550は、駆動トルク上下限設定部540によって設定された駆動トルクの上下限範囲内(Tpmax〜Tpmin)で、要求トルクTp*0に最も近いトルクを、駆動トルク指令値Tp*に設定する。
【0084】
要求トルクTp*0は、ハイブリッド車両20の車両状態(代表的には、車速Vおよびアクセル開度Acc)に基づいて設定される、ユーザ要求に対応した車両駆動力を発生するための駆動軸トルクに相当する。
【0085】
MGトルク換算部560は、駆動トルク設定部550によって設定された駆動トルク指令値Tp*を、MG1,MG2の出力トルクに換算する。これにより、MG1,MG2の駆動力制御トルクT1d,T2dが算出される。MGトルク換算部560は「第2のトルク算出部」に対応する。
【0086】
MGトルク設定部570は、MGトルク換算部560によって設定された駆動力制御トルクT1d,T2dと、MGトルク換算部520によって設定された電力制御トルクT1p,T2pとの和に従って、MG1,MG2のトルク指令値T1r,T2rを設定する。
【0087】
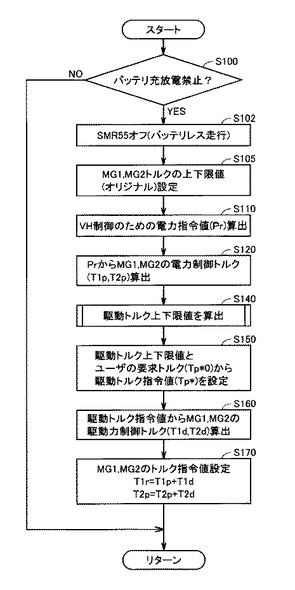
次に、図4および図5に示した機能ブロック図に係るバッテリレス走行制御を実現するための制御処理を、図7および図8のフローチャートを用いて説明する。
【0088】
図7および図8に示すフローチャートによる制御処理は、バッテリレス走行制御時に、所定の制御周期毎に実行される。なお、図7および図8に示した各ステップにおける制御処理は、HVECU70によるソフトウェア処理および/またはハードウェア処理によって実行されるものとする。
【0089】
図7を参照して、HVECU70は、ステップS100により、バッテリ異常によってバッテリ50の充放電が禁止されている状態であるか否かを判定する。そして、充放電禁止時(S100のYES判定時)には、HVECU70は、ステップS102により、SMR55をオフする。さらに、バッテリレス走行制御のための以降のステップS105〜S170が実行される。
【0090】
一方、HVECU70は、バッテリ50が使用できるとき(S100のNO判定時)には、バッテリレス走行制御のための以降のステップS105〜S170をスキップする。
【0091】
HVECU70は、ステップS105では、MG1トルクおよびMG2トルクの上下限値を設定する。ステップS105の処理は、図4のMGトルク上下限設定部530の機能に相当する。これにより、今回の制御周期における、オリジナルのトルク上限値T1max,T2maxおよびトルク下限値T1min,T2minが設定される。
【0092】
さらに、HVECU70は、ステップS110により、システム電圧VHを電圧指令値VHrに制御するための電力指令値Prを算出する。ステップS110による処理は、図4の電力指令算出部510の機能に相当する。たとえば、電力指令値Prは、下記(4)式に従って設定される。
【0093】
Pr=ΔPr+Ploss+Pax …(4)
式(4)中において、電力補正指令値ΔPrは、電圧偏差(VH−VHr)に対してPID制御演算を実行した制御演算値を示す。Plossは、MG1,MG2による損失電力である。たとえば、Plossは、MG1およびMG2のそれぞれについて、回転数の関数として設定することができる。また、Paxは、電力線54の電力を使用して動作する補機負荷の消費電力である。
【0094】
VHr>VHのときには、電力線54の電力が不足しているので、電力指令値Prは、PID制御演算によって負方向に変化する。反対に、VHr<VHのときには、電力線54の電力が過剰であるので、電力指令値Prは、PID制御演算によって正方向に変化する。
【0095】
HVECU70は、ステップS120では、電力指令値Prに基づいて、MG1,MG2の電力制御トルクT1p,T2pを算出する。ステップS120による処理は、図4のMGトルク換算部520の機能に相当する。
【0096】
電力制御トルクT1p,T2pは、駆動軸トルクに影響を与えることなく、電力指令値Prに従った電力変化量を電力線54に生じさせるための、MG1,MG2の出力トルクに相当する。電力制御トルクT1p,T2pは、下記のように求めることができる。
【0097】
まず、(1)式で、Tp=0と置くとともに、Tm=T2pおよびTg=T1pを代入することによって、下記(5)式が得られる。
【0098】
0=T2p×Gr−T1p×(1/ρ) …(5)
(5)式より、電力制御トルクT1pおよびT2pの間には、下記(6)式の関係が成立することが理解される。
【0099】
T1p=T2p×ρ×Gr …(6)
さらに、(2)式において、ΔP=Prとし、Tm=T2pとし、Tgに(6)式のT1pを代入することにより、下記(7)式が得られる。
【0100】
Pr=T2p×Nm+T2p×ρ×Gr×Ng
=T2p×(Nm+(ρ×Gr×Ng)) …(7)
(7)式より、MG2の電力制御トルクT2pは、下記(8)式で示されることが理解される。
【0101】
T2p=Pr/(Nm+(ρ×Gr×Ng)) …(8)
また、(8)式および(6)式から、MG1の電力制御トルクT1pは下記(9)式で示される。
【0102】
T1p=Pr×(ρ×Gr)/(Nm+(ρ×Gr×Ng)) …(9)
MG1およびMG2が電力制御トルクT1p,T2pを出力すると、駆動軸32aに作用するトルクを変化させることなく(Tp=0)、電力指令値Prに従った電力を電力線54に対して入出力することができる。
【0103】
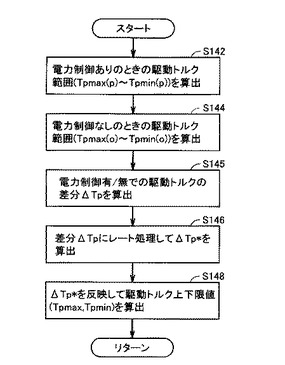
続いて、HVECU70は、ステップS140により、駆動トルクTpの上下限値を算出する。ステップS140は、図8に示すステップS142〜S148を含む。
【0104】
図8を参照して、HVECU70は、ステップS142では、電力制御ありのときの駆動トルク上限値Tpmax(p)および駆動トルク下限値Tpmin(p)を算出する。以下に説明するステップS142での処理によって、図5の駆動トルク上下限設定部545の機能が実現される。
【0105】
ステップS142では、オリジナルのトルク上限値T1maxおよびトルク下限値T1minから電力制御トルクT1pを減算することによって、MG1について修正後のトルク上限値T1max♯およびトルク下限値T1min♯が求められる。同様に、オリジナルのトルク上限値T2maxおよびトルク下限値T2minから電力制御トルクT2pを減算することによって、MGについて修正後のトルク上限値T2max♯およびトルク下限値T2min♯が求められる。
【0106】
トルク上限値T1max♯およびトルク下限値T1min♯によって、電力制御トルクT1pを確保した上で、オリジナルのトルク上下限範囲T1max〜T1minに収まるように、駆動トルク確保のためにMG1が出力可能なトルク範囲が示される。同様に、トルク上限値T2max♯およびトルク下限値T2min♯によって、電力制御トルクT2pを確保した上で、駆動トルク確保のためにMG2が出力可能なトルク範囲が示される。
【0107】
ステップS140では、ステップS130で修正されたトルク上下限値に基づいて、駆動軸32aに出力される駆動トルクの上下限値が演算される。
【0108】
ここで、電力バランスを保った上で、すなわちΔPr=0として駆動トルクTpを発生するためのMG1,MG2のトルクTg,Tmの関係は、(2)式においてΔP=0と置くことで、下記(10)式で示される。
【0109】
Tg=−(Nm/Ng)×Tm …(10)
(10)式を(1)式に代入してTgを消去することにより、ΔP=0としたときの駆動トルクTpとMG2トルクTmとの関係は、(11)式で示される。
【0110】
Tp=Tm×Gr+(1/ρ×Nm/Ng)×Tm
=(Gr+(1/ρ×Nm/Ng))×Tm …(11)
(11)式に、MG2についてのトルク上限値T2max♯およびT2min♯を代入することにより、電力制御ありのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax2,Tpmin2が得られる。
【0111】
同様に、(10)式を(1)式に代入してTmを消去することにより、ΔP=0としたときの駆動トルクTpとMG1トルクTgとの関係は、(12)式で示される。
【0112】
Tp=−(Ng/Nm×Gr)×Tg−(1/ρ)×Tg
=−(1/ρ+Gr×Ng/Nm)×Tg …(12)
したがって、(12)式に、MG1についてのトルク上限値T1max♯およびT1min♯を代入することにより、電力制御ありのときのMG1トルク制限からの駆動トルクTpの上下限値Tpmax1,Tpmin1が得られる。
【0113】
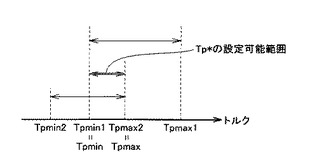
図9を参照して、MG1トルク制限からの駆動トルクの上下限範囲(Tpmax1〜Tpmin1)と、MG2トルク制限からの駆動トルクの上下限範囲(Tpmax2〜Tpmin2)とが重なる範囲が、電力制御ありのときの駆動トルクの上下限範囲に設定される。すなわち、駆動トルク上限値Tpmax(p)=min(Tpmax1,Tpmax2)であり、駆動トルク下限値Tpmin(p)=max(Tpmin1,Tpmin2)である。これにより、電力制御トルクT1p,T2pの出力を確保した上で、駆動軸32aに出力可能な駆動トルクTpの上下限範囲(Tpmax(p)〜Tpmin(p))が定められる。
【0114】
HVECU70は、ステップS144では、電力制御なしのときの駆動トルク上限値Tpmax(o)および駆動トルク下限値Tpmin(o)を算出する。
【0115】
ステップS144では、上述の(11)式に、電力制御を考慮しない、すなわち、ステップS105で設定されたオリジナルのMG2トルク上下限値T2max,T2minを代入することにより、電力制御なしのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax2,Tpmin2を算出する。さらに、上述の(12)式に、ステップS105で設定されたオリジナルのMG1トルク上下限値T1max,T1minを代入することにより、電力制御なしのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax1,Tpmin1が得られる。
【0116】
そして、電力制御ありのときと同様にして、電力制御なしのときにおける、駆動軸32aに出力可能な駆動トルクTpの上下限範囲(Tpmax(o)〜Tpmin(o))が定められる。ステップS144での処理によって、図5の駆動トルク上下限設定部542の機能が実現される。
【0117】
さらに、HVECU70は、ステップS145では、電力制御の有/無によるトルク差分ΔTpを算出する。以下では、代表的に、駆動トルク上限値Tpmax(o)およびTpmax(p)の差をトルク差分ΔTpとする(ΔTp=Tpmax(o)−ΔTpmax(p))。
【0118】
HVECU70は、ステップS146では、トルク差分ΔTpに基づいて、レート処理されたトルク差分ΔTp*を算出する。レート処理は、制御周期間での変化量(ΔTpの減少側)を所定制限値LM以下に制限する。これにより、駆動力(駆動トルク)増加側のΔTp*の時間方向の変化が抑制される。なお、駆動トルク減少側(すなわち、ΔTpの増加側)については、レート処理は実行されない。したがって、ΔTpの今回値が前回の周期でのΔTp*よりも大きいときは、今回の制御周期におけるΔTp*=ΔTpとなる。
【0119】
この結果、前回の制御周期における前回値ΔTp*(−1)に対して、今回の制御周期におけるΔTp*は、下記(13)式の範囲内に制限される。
【0120】
ΔTp*(−1)−LM≦ΔTp* …(13)
すなわち、ステップS145で算出されたΔTpについて、ΔTp*(−1)−LM≦ΔTpであれば、ΔTp*=ΔTpに設定される。ただし、ΔTp<ΔTp*(−1)−LMのときには、ΔTp*=ΔTp*(−1)−LMに制限される。
【0121】
ステップS145,S146では、駆動トルク下限値Tpmin(o)およびTpmin(p)についても同様に、電力制御の有/無によるトルク差分ΔTpおよびレート処理されたΔTp*が算出される。
【0122】
HVECU70は、ステップS148では、レート処理されたトルク差分ΔTp*を反映して、最終的な駆動トルクTpの上下限値Tpmax,Tpminを算出する。
【0123】
具体的には、電力制御なしのときの駆動トルク上限値Tpmax(o)と、トルク上限値に関してレート処理されたトルク差分ΔTp*とによって、下記(14)式によって、駆動トルク上限値Tpmaxが設定される。
【0124】
Tpmax=Tpmax(o)−ΔTp* …(14)
駆動トルク下限値Tpminは、電力制御なしのときの駆動トルク下限値Tpmin(o)によって、下記(15)式に従って設定される。
【0125】
Tpmin=Tpmin(o) …(15)
このように、ステップS145〜S148の処理は、図5のレート処理部546の機能に対応する。
【0126】
再び、図7を参照して、HVECU70は、ステップS150により、ステップS140により算出された駆動トルク上下限値Tpmax,Tpminとユーザからの要求トルクTp*0とに基づいて、駆動トルク指令値Tp♯を設定する。ステップS150の処理は、図4の駆動トルク設定部550の機能に対応する。
【0127】
ステップS150では、駆動トルク指令値Tp*は、ステップS140で設定された駆動トルクTpの上下限範囲(Tpmax〜Tpmin)内で、要求トルクTp*0に最も近い値に設定される。具体的には、Tp*0>Tpmaxのときには、Tp*=Tpmaxに設定される。同様に、Tp*0<Tpminのときには、Tp*=Tpminに設定される。また、Tpmin<Tp*0<Tpmaxのときには、Tp*=Tp*0に設定されることになる。
【0128】
そしてHVECU70は、ステップS160により、ステップS150で設定された駆動トルク指令値Tp*から、MG1,MG2の駆動力制御トルクT1d,T2dを算出する。駆動力制御トルクT1d,T2dは、電力制御を実行した上で、駆動トルク指令値Tp*に従った駆動トルクを発生するためのMG1,MG2の出力トルクに相当する。ステップS160による処理は、図4のMGトルク換算部560の機能に対応する。
【0129】
駆動力制御トルクT1dは、式(12)において、Tp=Tp*とし、Tg=T1dとすることによって、式(16)によって求められる。
【0130】
T1d=−Tp*/(1/ρ+Gr×Ng/Nm) …(16)
同様に、駆動力制御トルクT2dは、式(11)において、Tp=Tp*とし、Tm=T2dとすることによって、式(17)によって求められる。
【0131】
T2d=Tp*/(Gr+(1/ρ×Nm/Ng)) …(17)
HVECU70は、ステップS170により、MG1,MG2のトルク指令値Tr1,Tr2を設定する。ステップS170の処理は、図4のMGトルク設定部570の機能に対応する。
【0132】
ステップS170では、下記の式(18),(19)に基づいて、最終的なトルク指令値T1r,T2rが算出される。
【0133】
T1r=T1p+T1d …(18)
T2r=T2p+T2d …(19)
そして、図2に示した電気システムによって、MG1,MG2の出力トルクが、トルク指令値T1r,T2rに従って制御される。
【0134】
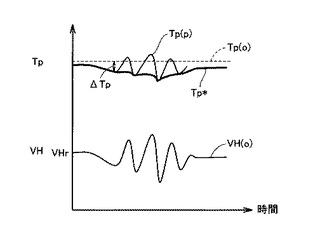
図10は、本発明の実施の形態によるバッテリレス走行制御による駆動トルクの設定例を説明する動作波形図である。図10では、駆動トルク上限値に従って駆動トルクTpを確保したケースが例示されている。
【0135】
図10を参照して、駆動トルクTp(o)は、電力制御なしのときの駆動トルク上限値に対応する。この例では、駆動トルクTp(o)がシステム電圧VHを考慮することなく、上限値いっぱいの一定値に設定される。このときのシステム電圧VH(o)は、電力制御が行われないため、図示するように変動する。
【0136】
一方で、システム電圧VHのフィードバックによる電力制御を実行したときに設定される駆動トルクが、図中Tp(p)で示される。駆動トルクTp(p)は、電力制御トルクによってMG1,MG2のトルク上下限値が修正されることによって駆動トルク上限値も変化することから、システム電圧VHを制御するように変動する。
【0137】
しかしながら、駆動トルクTp(p)に従って駆動トルク指令値Tp*を設定すると、図示されるように駆動トルクの変化が比較的大きくなるため、車両走行性が低下する虞がある。
【0138】
このため本発明の実施の形態によるバッテリレス走行制御では、駆動トルク上下限値の設定の際に、電力制御の有/無によるトルク差分(ΔTp)をレート処理したトルク差分ΔTp*を反映して、駆動トルク上下限値を設定する。この結果、駆動トルク上限値いっぱいで駆動トルク指令値Tp*が設定された場合にも、Tp*の時間軸方向での変化を緩やかにすることができる。
【0139】
このように、本実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御では、システム電圧VHを制御するための電力制御トルクT1p,T2pを出力する余地を確保しつつ、駆動トルクが急激に変化しないように制約して、駆動トルクの上下限範囲を設定することができる。したがって、コンバータ40が使用できないバッテリレス走行においても、システム電圧VHを安定化するための電力制御を実行しつつ、電力制御の影響による駆動トルクの変動を抑制するように、MG1,MG2の出力トルクを設定できる。この結果、車両走行性が向上する。
【0140】
さらに、MG1,MG2の両方のトルクによって電力制御を行なうので、電力制御を実現した上でMG1,MG2から出力可能なトルク範囲が広くなる。この結果、バッテリレス走行における車両駆動力が確保し易くなる。また、システム電圧VHを制御することによって、システム電圧VHの変動に起因したMG1,MG2のトルク変動を抑制することができる。したがって、これらの面からも走行性能を向上させることができる。
【0141】
なお、本発明が適用されるハイブリッド車両の構成は、図1の例示に限定されるものではない点について確認的に記載する。具体的には、内燃機関と、内燃機関の動力の少なくとも一部を用いて発電する発電機と、発電機の発電電力が供給される電力線の電力によって駆動軸にトルクを出力する電動機とを用いてバッテリレス走行を実行することが可能な構成であれば、本実施の形態で説明したバッテリレス走行制御に従って、発電機および電動機の出力トルクを適切に設定することができる。
【0142】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【産業上の利用可能性】
【0143】
本発明は、車載蓄電装置を不使用とした走行モードを有するハイブリッド車両の走行制御に適用することができる。
【符号の説明】
【0144】
20 ハイブリッド車両、22 エンジン、23 クランク角センサ、24 エンジンECU、26 クランクシャフト、28 トーショナルダンパ、30 動力分割機構、31,65 サンギヤ、31a サンギヤ軸、32,66 リングギヤ、32a リングギヤ軸(駆動軸)、33,67 ピニオンギヤ、34 キャリア、37 ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、40 コンバータ、41,42 インバータ、43,44 回転位置検出センサ、45 モータECU、48 出力軸(MG2)、50 バッテリ、52 バッテリECU、54 電力ライン、60 変速機、61 ケース、70 HVECU、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、112,122 中性点、180 電圧センサ、500 バッテリレス走行制御部、510 電力指令算出部、520,560 MGトルク換算部、530 MGトルク上下限設定部、540 駆動トルク上下限設定部、550 駆動トルク設定部、570 トルク設定部、C0 平滑コンデンサ、MG1 モータジェネレータ(発電機)、MG2 モータジェネレータ(電動機)、Ne エンジン回転数、Ng MG1回転数、Nm MG2回転数、Pr 電力指令値、SP シフトポジション、T1r,T2r トルク指令値、T1p,T2p 電力制御トルク、T1max,T2max MGトルク上限値(オリジナル)、T1max♯,T2max♯ MGトルク上限値(修正値)、T1min,T2min トルク下限値(オリジナル)、T1min♯,T2min♯ トルク下限値(修正値)、T1d,T2d 駆動力制御トルク、Te エンジントルク、Tep 直達トルク、Tg MG1トルク、Tm MG2トルク、Tp*0 要求トルク、Tp* 駆動トルク指令値、Tpmax 駆動トルク上限値(最終)、Tpmax(o) 駆動トルク上限値(電力制御なし)、Tpmax(p) 駆動トルク上限値(電力制御あり)、Tpmin 駆動トルク下限値(最終)、Tpmin(o) 駆動トルク下限値(電力制御なし)、Tpmin(p) 駆動トルク下限値(電力制御あり)、VH システム電圧、VHr 電圧指令値。
【技術分野】
【0001】
この発明は、ハイブリッド車両およびその制御方法に関し、より特定的には、車載蓄電装置を不使用とした走行モードを有するハイブリッド車両の走行制御に関する。
【背景技術】
【0002】
近年、環境に配慮した自動車として、走行用電動機および内燃機関を搭載したハイブリッド車両が注目されている。ハイブリッド車両の駆動系の一態様として、エンジンと、電動機と、発電機とが、プラネタリギヤで構成された動力分割機構を介して機械的に連結されたものが知られている。
【0003】
特開2007−137373号公報(特許文献1)および特開2008−279978号公報(特許文献2)には、このような駆動系を有するハイブリッド車両において、車載蓄電装置の充放電が禁止されている状態で、バッテリを電気システムから切離して走行(以下、バッテリレス走行とも称する)する場合における走行制御が記載されている。
【0004】
特許文献1には、バッテリレス走行の際に、エンジンが目標回転数で回転するようにエンジントルクを設定するフィードバック制御を行うとともに、要求トルクが駆動軸に作用するようにインバータを制御することが記載されている。そして、エンジンの目標回転数と現在の回転数との差が小さいときには、コンデンサ電圧を目標電圧に一致させるためのフィードバック制御に基づいて、電動機および発電機の出力トルクを設定することが記載されている。また、特許文献2には、バッテリレス走行時におけるリレー溶着判定が記載される。
【0005】
特開2009−045946号公報(特許文献3)には、主駆動輪を駆動する内燃機関と、内燃機関で駆動される発電機と、従駆動輪を駆動可能なモータとを備えるハイブリッド車両において、車両がロールバックまたはロールフォワード状態では、アクセルペダルが踏まれる前であっても、モータの回生電圧がモータの損失を超えない範囲のモータ回転数に、モータを制御することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−137373号公報
【特許文献2】特開2008−279978号公報
【特許文献3】特開2009−045946号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1〜3に記載されるように、発電機と電動機とを備えたハイブリッド車両のバッテリレス走行では、発電機の発電電力と電動機の消費電力との均衡によって、電気システム内に過電圧が発生することを回避する必要がある。したがって、特許文献1に記載されるように、電力制御を考慮して、発電機および電動機の出力トルクを設定することが好ましい。
【0008】
しかしながら、電力制御のために発電機および電動機の出力トルクを変化させると、駆動軸に作用する駆動トルク(すなわち、車両駆動力)の出力可能範囲も変化する。これにより、駆動トルクが大きく変化することによって車両走行性に影響を与える虞がある。
【0009】
この発明はこのような問題点を解決するためになされたものであって、この発明の目的は、ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御することである。
【課題を解決するための手段】
【0010】
この発明のある局面によれば、ハイブリッド車両は、内燃機関と、発電機と、電動機と、蓄電装置と、第1および第2の電力変換器と、走行制御部とを備える。内燃機関は、駆動軸との間に動力伝達経路を有するように構成される。発電機は、内燃機関の動力の少なくとも一部を用いて発電するように構成される。電動機は、駆動軸との間に動力伝達経路を有するように構成される。蓄電装置は、電力線に対して、開閉器を介して電気的に接続される。第1の電力変換器は、発電機の出力トルクが第1のトルク指令値と一致するように、電力線および発電機の間で双方向の電力変換を実行するように構成される。第2の電力変換器は、電動機の出力トルクが第2のトルク指令値と一致するように、電力線および電動機の間で双方向の電力変換を実行するように構成される。走行制御部は、開閉器が開放された走行状態において、車両走行のための要求トルクに応じて、発電機および電動機の出力トルクを設定する。特に、走行制御部は、駆動軸に作用するトルクに影響を与えずに、電力線の電圧を電圧指令値を一致させるように電力線の電力変化量を制御するための電動機および発電機による電力制御トルクを算出する。さらに、走行制御部は、電動機および発電機が電力制御トルクを出力したときと、電動機および発電機が電力制御トルクを出力しないときとの間での駆動軸に出力可能なトルク範囲の差分を算出する。そして、走行制御部は、当該差分の時間軸に対する変化量を制約した値を反映して決定された駆動軸のトルク上下限範囲内で要求トルクに最も近いトルクが駆動軸に作用するように、第1および第2のトルク指令値を設定する。
【0011】
好ましくは、走行制御部は、電力指令算出部と、第1のトルク算出部と、第1および第2のトルク上下限設定部と、レート処理部と、駆動トルク設定部とを含む。電力指令算出部は、電力線の電圧を電圧指令値に制御するための電力線の入出力電力の指令値を算出するように構成される。第1のトルク算出部は、駆動軸に作用するトルクに影響を与えずに、発電機および電動機から電力線に対して指令値に従った電力を入出力するための、発電機の電力制御トルクおよび電動機の電力制御トルクを演算するように構成される。第1のトルク上下限設定部は、発電機および電動機の第1のトルク上下限範囲に基づいて、駆動軸に出力可能な第1のトルク範囲を設定するように構成される。第2のトルク上下限設定部は、第1のトルク上下限範囲から電動機および発電機の電力制御トルクが減算された、発電機および電動機の第2のトルク上下限範囲に基づいて、駆動軸に出力可能な第2のトルク範囲を設定するように構成される。レート処理部は、第1および第2のトルク範囲の差分の時間軸方向の変化を制約したトルク値と、第1のトルク範囲とに基づいて、駆動軸のトルク上下限範囲を算出するように構成される。駆動トルク設定部は、設定された駆動軸のトルク上下限範囲と、車両走行のための要求トルクとに基づいて、駆動軸のトルク指令値を設定するように構成される。
【0012】
さらに好ましくは、走行制御部は、第2のトルク算出部と、トルク設定部とをさらに含む。第2のトルク算出部は、電力線に対する入出力電力を変えずに駆動軸のトルク指令値を駆動軸に作用させるための、発電機の駆動力トルクおよび電動機の駆動力トルクを演算するように構成される。トルク設定部は、発電機および電動機のそれぞれの電力制御トルクおよび駆動力トルクの和に従って、第1および第2のトルク指令値を設定するように構成される。
【0013】
また好ましくは、ハイブリッド車両は、第1から第3の回転要素のうちのいずれか2つの回転要素の回転数が決定されると残余の1つの回転要素の回転数が決定されるとともに、第1から第3の回転要素のうちのいずれか2つの回転要素に入出力される動力に基づいて残余の1つの回転要素に動力を入出力するように構成される差動装置をさらに備える。第1の回転要素は、内燃機関の出力軸と機械的に連結される。第2の回転要素は、発電機の出力軸と機械的に連結される。第3の回転要素は、駆動軸および電動機の出力軸と機械的に連結される。
【0014】
また好ましくは、走行制御部は、トルク範囲の差分の時間軸に対する変化量を、駆動軸に出力可能なトルクの増加方向に対応する当該差分の変化方向に限って制約する処理によって得られた値を反映して、駆動軸のトルク上下限範囲を決定する。
【0015】
この発明の他の局面によれば、ハイブリッド車両の制御方法であって、ハイブリッド車両は、駆動軸との間に動力伝達経路を有するように構成された内燃機関と、内燃機関の動力の少なくとも一部を用いて発電するための発電機と、駆動軸との間に動力伝達経路を有するように構成された電動機と、電力線に対して開閉器を介して電気的に接続される蓄電装置と、発電機の出力トルクが第1のトルク指令値と一致するように、電力線および発電機の間で双方向の電力変換を実行するための第1の電力変換器と、電動機の出力トルクが第2のトルク指令値と一致するように、電力線および電動機の間で双方向の電力変換を実行するための第2の電力変換器と電動機および発電機の双方と電気的に接続された電力線に対して開閉器を介して電気的に接続される蓄電装置とを備える。制御方法は、走行中に蓄電装置の異常が検知された場合に、開閉器を開放するステップと、駆動軸に作用するトルクに影響を与えずに、電力線の電圧を電圧指令値を一致させるように電力線の電力変化量を制御するための電動機および発電機による電力制御トルクを演算するステップと、電動機および発電機が電力制御トルクを出力したときと、電動機および発電機が電力制御トルクを出力しないときとの間での駆動軸に出力可能なトルク範囲の差分を算出するステップと、当該差分の時間軸に対する変化量を制約した値を反映して駆動軸のトルク上下限範囲を決定するステップと、決定されたトルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸に発生するように、第1および第2のトルク指令値を設定するステップとを備える。
【0016】
好ましくは、算出するステップは、発電機および電動機の第1のトルク上下限範囲に基づいて、駆動軸に出力可能な第1のトルク範囲を設定するステップと、第1のトルク上下限範囲から電動機および発電機の電力制御トルクが減算された、発電機および電動機の第2のトルク上下限範囲に基づいて、駆動軸に出力可能な第2のトルク範囲を設定するステップと、第1および第2のトルク範囲の差分を算出するステップとを含む。そして、決定するステップは、算出された差分の時間軸方向の変化を制約したトルク値を算出するステップと、トルク値と第1のトルク範囲とに基づいて、駆動軸のトルク上下限範囲を算出するステップとを含む。
【0017】
さらに好ましくは、演算するステップは、電圧を電圧指令値に制御するための電力線の入出力電力の指令値を演算するステップと、駆動軸に作用するトルクに影響を与えずに、電力線に対して指令値に従った電力を入出力するための、発電機の電力制御トルクおよび電動機の電力制御トルクを演算するステップとを含む。
【0018】
あるいは、さらに好ましくは、設定するステップは、設定された駆動軸のトルク上下限範囲と要求トルクとに基づいて、駆動軸のトルク指令値を設定するステップと、電力線に対する入出力電力を変えずに駆動軸のトルク指令値を駆動軸に作用させるための、発電機の駆動力トルクおよび電動機の駆動力トルクを演算するステップと、発電機および電動機のそれぞれの電力制御トルクおよび駆動力トルクの和に従って、第1および第2のトルク指令値を設定するステップとを含む。
【0019】
また好ましくは、決定するステップは、トルク範囲の差分の時間軸に対する変化量を、駆動軸に出力可能なトルクの増加方向に対応する当該差分の変化方向に限って制約する処理によって得られた値を反映して、駆動軸のトルク上下限範囲を決定する。
【発明の効果】
【0020】
この発明によれば、ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための駆動トルクの変動を抑制するように、電動機および発電機のトルクを制御することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施の形態によるハイブリッド車両の概略構成図である。
【図2】図1に示したモータジェネレータを駆動制御するための電気システムの回路図である。
【図3】図1に示したハイブリッド車両の走行時における共線図である。
【図4】本発明の実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御のための機能ブロック図である。
【図5】図4に示した駆動トルク上下限設定部の詳細な機能ブロック図である。
【図6】システム電圧とトルク上限値との関係を示す概念図である。
【図7】本発明の実施の形態によるバッテリレス走行制御の制御処理を示すフローチャートである。
【図8】図7に示した駆動トルク上下限値を算出するステップの詳細な制御処理を示すフローチャートである。
【図9】駆動トルクの上下限範囲の設定手法を説明する概念図である。
【図10】本発明の実施の形態によるバッテリレス走行制御による駆動トルクの設定例を説明する動作波形図である。
【発明を実施するための形態】
【0022】
以下に、本発明の実施の形態について図面を参照して詳細に説明する。なお、以下図中の同一または相当部分には同一符号を付してその説明は原則的に繰返さないものとする。
【0023】
図1は、本発明の実施の形態によるハイブリッド車両の概略構成図である。
図1を参照して、本実施の形態によるハイブリッド車両20は、エンジン22と、エンジン22の出力軸としてのクランクシャフト26と、トーショナルダンパ28と、3軸式の動力分割機構30と、バッテリ50とを備える。クランクシャフト26は、トーショナルダンパ28を介して、動力分割機構30に連結される。
【0024】
ハイブリッド車両20は、さらに、モータジェネレータMG1,MG2(以下、単に、MG1,MG2と称する)と、変速機60と、ハイブリッド車両20の駆動系全体をコントロールするハイブリッド用電子制御ユニット(以下、「HVECU」とも称する)70とを備える。
【0025】
MG2は、変速機60を介して動力分割機構30に連結される。MG1,MG2の各々は、正トルクおよび負トルクの両方を出力可能であり、電動機として駆動できるとともに発電機としても駆動することができる。
【0026】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する「内燃機関」である。エンジン用電子制御ユニット(以下、「エンジンECU」とも称する)24は、クランク角センサ23からのクランクシャフト26のクランク角度等、エンジン22の運転状態を検出する各種センサから信号を入力される。エンジンECU24は、HVECU70と通信しており、HVECU70からエンジン22の制御指令を受ける。エンジンECU24は、各種センサからの信号に基づくエンジン22の運転状態に基づいて、HVECU70からの制御指令に従ってエンジン22が作動するように、エンジン22の燃料噴射制御や点火制御、吸入空気量制御などのエンジン制御を実行する。さらに、エンジンECU24は、必要に応じて、エンジン22の運転状態に関するデータをHVECU70に出力する。
【0027】
動力分割機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合するとともにリングギヤ32に噛合する複数のピニオンギヤ33と、キャリア34とを含む。キャリア34は、複数のピニオンギヤ33を自転かつ公転自在に保持するように構成される。動力分割機構30は、サンギヤ31、リングギヤ32、およびキャリア34を回転要素として差動作用を行なう遊星歯車機構として構成されている。
【0028】
キャリア34にはエンジン22のクランクシャフト26が連結され、サンギヤ31には、サンギヤ軸31aを介してMG1の出力軸が連結される。「駆動軸」としてのリングギヤ軸32aは、リングギヤ32の回転に伴って回転する。リングギヤ軸32aには、変速機60を介してMG2の出力軸が連結される。以下では、リングギヤ軸32aを、駆動軸32aとも称する。
【0029】
駆動軸32aは、ギヤ機構37およびデファレンシャルギヤ38を介して駆動輪39a,39bに機械的に連結されている。したがって、動力分割機構30によりリングギヤ32、すなわち、駆動軸32aに出力された動力は、ギヤ機構37,デファレンシャルギヤ38を介して駆動輪39a,39bに出力されることになる。
【0030】
このように、動力分割機構30は「差動装置」に対応する。また、キャリア34は「第1の回転要素」に対応し、サンギヤ31は「第2の回転要素」に対応し、リングギヤ32は「第3の回転要素」に対応する。
【0031】
変速機60は、MG2の出力軸48と駆動軸32aとの間に所定の減速比Grを与えるように構成される。変速機60は、代表的には、遊星歯車機構により構成される。変速機60は、外歯歯車のサンギヤ65と、このサンギヤ65と同心円上に配置された内歯歯車のリングギヤ66と、サンギヤ65に噛合するとともにリングギヤ66に噛合する複数のピニオンギヤ67とを含む。プラネタリキャリアは、ケース61に固定されるので、複数のピニオンギヤ67は、公転することなく、自転のみを行なう。すなわち、サンギヤ65およびリングギヤ66の回転速度の比(減速比)が固定される。
【0032】
なお、変速機60の構成は図1の例に限定されるものではない。また、変速機60を介することなく、MG2の出力軸およびリングギヤ軸(駆動軸)32aが連結される構成としてもよい。
【0033】
MG1が発電機として機能するときには、キャリア34から入力されるエンジン22からの動力が、サンギヤ31側およびリングギヤ32側にそのギヤ比に応じて分配される。一方、MG1が電動機として機能するときには、キャリア34から入力されるエンジン22からの動力と、サンギヤ31から入力されるMG1からの動力とが統合されて、リングギヤ32に出力される。
【0034】
MG1,MG2は、代表的には、三相の永久磁石型同期電動機により構成される。MG1,MG2は、コンバータ40およびインバータ41,42を介して,バッテリ50との間で電力のやりとりを行なう。インバータ41,42の各々は、複数個のスイッチング素子を有する一般的な三相インバータによって構成される。
【0035】
バッテリ50は、「蓄電装置」の代表例として示される。バッテリ50には、代表的には、リチウムイオン二次電池やニッケル水素二次電池が適用される。ただし、バッテリ50に代えて、電気二重層キャパシタ等の他の蓄電装置、あるいは、二次電池と他の蓄電装置とを組み合わせたものを用いてもよい。
【0036】
バッテリ50は、バッテリ用電子制御ユニット(以下、「バッテリECU」とも称する)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号が入力される。たとえば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧、図示しない電流センサからのバッテリ50の充放電電流,バッテリ50に取り付けられた図示しない温度センサからの電池温度などが、バッテリECU52に入力される。バッテリECU52は、必要に応じて、バッテリ50の状態に関するデータを通信によりHVECU70に出力する。なお、バッテリECU52では、バッテリ50を管理するために、電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC:State of Charge)も演算している。
【0037】
バッテリ50と、SMR(System Main Relay)55と、コンバータ40と、インバータ41,42とによって、ハイブリッド車両20の電気システムが構成される。SMR55は、バッテリ50とコンバータ40との間に配置される。
【0038】
図2は、図1に示したMG1,MG2を駆動制御するための電気システムの回路図である。
【0039】
図2を参照して、SMR55がオフ状態であると、バッテリ50は電気システムから切離される。SMR55がオン状態であると、バッテリ50が電気システムに接続される。SMR55は、HVECU70からの制御信号に応答してオンオフされる。たとえば、イグニッションスイッチ80がオンされた状態で、ユーザが運転開始のための操作を行うことによって、電気システムの起動が指示される。電気システムの起動が指示されると、HVECU70は、SMR55をオンする。
【0040】
コンバータ40は、リアクトルおよび2つの電力用半導体スイッチング素子(以下、単にスイッチング素子とも称する)によって構成される、一般的な昇圧チョッパ回路の構成を有する。電力用半導体スイッチング素子としては、バイポーラトランジスタや、パワーMOSFET(Metal Oxide Semiconductor Field-Effect Transistor)、あるいは、IGBT(Insulated Gate Bipolar Transistor)等を用いることができる。各スイッチング素子には、逆並列ダイオードが接続される。
【0041】
MG1と接続されたインバータ41は、U相アーム、V相アームおよびW相アームを含む。U相アーム、V相アームおよびW相アームは並列に接続される。U相アーム、V相アームおよびW相アームは、それぞれ、直列に接続された2つスイッチング素子を有する。各スイッチング素子には逆並列ダイオードが設けられている。
【0042】
MG1の図示しない固定子に巻回された各相コイル(U、V,W)は、中性点112において交互に接続される。インバータ41の各相アームにおけるスイッチング素子の接続点は、MG1の各相コイルの端部にそれぞれ接続される。
【0043】
インバータ42は、インバータ41と同様に、一般的な三相インバータの構成を有する。MG2の図示しない固定子に巻回された各相コイル(U、V,W)は、中性点122において交互に接続される。インバータ42の各相アームにおけるスイッチング素子の接続点は、MG2の各相コイルの端部にそれぞれ接続される。
【0044】
バッテリ50から放電された電力をMG1もしくはMG2に供給する際、電圧がコンバータ40により昇圧される。逆に、MG1もしくはMG2により発電された電力をバッテリ50に充電する際、電圧がコンバータ40により降圧される。
【0045】
コンバータ40とインバータ41および42との間の電力線54上の直流電圧であるシステム電圧VHは、電圧センサ180により検出される。電圧センサ180の検出結果は、モータECU45に送信される。
【0046】
コンバータ40は、システム電圧VHと、バッテリ50の電圧Vbとの間で、双方向の直流電圧変換を実行する。コンバータ40のスイッチング素子のデューティは、電力線54のシステム電圧VHが電圧指令値VHrに合致するように制御される。
【0047】
インバータ41は、電力線54上の直流電圧をスイッチング素子のオンオフにより交流電圧に変換する。変換された交流電圧は、MG1に供給される。また、インバータ41は、MG1が回生発電によって発生した交流電力を直流電力に変換する。
【0048】
同様に、インバータ42は、電力線54上の直流電圧を交流電圧に変換して、MG2に供給する。また、インバータ42は、MG2が回生発電によって発生した交流電力を直流電力に変換する。
【0049】
このように、コンバータ40とインバータ41,42とを電気的に接続する電力線54は、各インバータ41,42が共用する正極母線および負極母線として構成される。電力線54は、MG1およびMG2の双方と電気的に接続されるので、MG1,MG2の一方で発電される電力を他方で消費することができる。したがって、バッテリ50は、MG1,MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、MG1,MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。
【0050】
MG1,MG2は、いずれもモータ用電子制御ユニット(以下、「モータECU」とも称する)45により駆動制御される。モータECU45には、MG1,MG2を駆動制御するために必要な信号が入力される。たとえば、MG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や、図示しない電流センサにより検出されるMG1,MG2に印加される相電流などが、モータECU45へ入力される。回転位置検出センサ43,44からの信号に基づいて、MG1,MG2の回転速度が検出できる。
【0051】
モータECU45は、HVECU70と通信しており、HVECU70からの動作指令に従って、MG1,MG2を駆動制御する。具体的には、モータECU45は、MG1およびMG2の出力トルクが、トルク指令値Tr1およびTr2に合致するように、インバータ41,42へのスイッチング制御信号を出力する。たとえば、モータECU45は、トルク指令値Tr1,Tr2に従って設定される電流指令値と、MG1,MG2の電流検出値との偏差に基づいて、インバータ41,42の出力電圧指令(交流電圧)を演算する。そして、インバータ41,42のスイッチング制御信号は、たとえばパルス幅変調制御に従って、インバータ41,42が出力する擬似交流電圧が、それぞれの出力電圧指令に近づくように生成される。インバータ41は「第1の電力変換器」に対応し、インバータ42は「第2の電力変換器」に対応する。
【0052】
再び図1を参照して、HVECU70は、CPU(Central Processing Unit)72を中心とするマイクロプロセッサとして構成される。HVECU70は、CPU72と、処理プログラムやマップ等を記憶するROM(Read Only Memory)74と、データを一時的に記憶するRAM(Random Access Memory)76と、図示しない入出力ポートおよび通信ポートとを含む。HVECU70には、イグニッションスイッチ80からのイグニッション信号、シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc、ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP、車速センサ88からの車速Vなどが入力ポートを介して入力されている。
【0053】
また、HVECU70は、上述のように、エンジンECU24、モータECU45および、バッテリECU52と、通信ポートを介して接続されている。これにより、HVECU70は、他のECUとの間で各種制御信号やデータのやりとりを行なっている。なお、エンジンECU24、モータECU45および、バッテリECU52についても、HVECU70と同様に、マイクロプロセッサによって構成できる。また、図1では、HVECU70、エンジンECU24、モータECU45および、バッテリECU52を別個のECUとして記載したが、これらの機能の一部または全部を統合したECUを配置することも可能である。あるいは、図示された各ECUの機能をさらに分割するように、ECUを配置してもよい。
【0054】
HVECU70は、車両状態に適した走行を行なうための走行制御を実行する。たとえば、車両発進時および低速走行時には、エンジン22を停止した状態で、MG2の出力によってハイブリッド車両20は走行する。定常走行時には、エンジン22を始動して、エンジン22およびMG2の出力によってハイブリッド車両20は走行する。特に、エンジン22を高効率の動作点で動作させることによって、ハイブリッド車両20の燃費が向上する。
【0055】
エンジン22、MG1およびMG2が動力分割機構30を介して連結されることで、エンジン22、MG1およびMG2の回転数は、図3に示すように共線図で結ばれる関係になる。
【0056】
図3を参照して、走行時には、MG2は主に「電動機」として動作し、MG1は主に「発電機」として動作する。以下では、MG2のトルクおよび回転数をTmおよびNmとも表記し、MG1のトルクおよび回転数をTgおよびNgとも表記する。
【0057】
エンジン22は、エンジン要求パワーに基づいて定められた動作点(エンジン回転数NeおよびエンジントルクTe)で動作するように、エンジンECU24(図1)によって制御される。
【0058】
MG1のトルクTgおよび回転数Ngは、エンジン回転数Neを上記動作点に従った目標回転数とするように制御される。上述のように、通常走行時には、MG1は負トルク(Tg<0)を出力し、発電する状態となる。
【0059】
このとき、エンジントルクTeの反力を受け持つように出力されたトルクTgによって、駆動軸32aに伝達される直達トルクTepは、Tep=−Tg×(1/ρ)で示される。なおρは、動力分割機構30におけるギヤ比である。
【0060】
一方、変速機60のギヤ比(減速比)Grを用いて、MG2のトルクTmによって駆動軸32aに発生するトルクは、Tm×Grで示される。したがって、駆動軸32a(リングギヤ32)に作用する駆動トルクTpについて、下記(1)式が成立する。
【0061】
Tp=Tm×Gr−Tg×(1/ρ) …(1)
ハイブリッド車両20では、バッテリ50に異常が発生して充放電が禁止されると、SMR55をオフ状態として、バッテリ50を電気システムから切り離した状態で、図3に示した共線図に従って走行を継続する。以下では、バッテリ50を不使用とした走行を「バッテリレス走行」と称し、バッテリレス走行時の走行制御について、「バッテリレス走行制御」と称する。
【0062】
バッテリレス走行時には、バッテリ50を電力バッファとして使用することができない。このため、MG1およびMG2全体での入出力電力ΔPが、そのまま電力線54(平滑コンデンサC0)に対して入出力される。ΔPは、下記(2)式で示される。ΔP<0のときに、MG1,MG2から電力線54へ電力が供給され、ΔP>0のときに、電力線54からMG1,MG2へ電力が供給される。
【0063】
ΔP=Tm×Nm+Tg×Ng …(2)
バッテリレス走行時には、電力線54のシステム電圧VHが、P=(1/2)×C×VH×VHの関係に従って、入出力電力ΔPに応じて変化する。なお、平滑コンデンサC0のキャパシタンスをCとする。したがって、ΔPによる電圧変化ΔVHは、下記(3)式によって示される。MG2の消費電力よりもMG1の発電電力の方が大きいΔP<0のときには、ΔVH>0であり、システム電圧VHが上昇する。
【0064】
ΔP=−(C/2)×2×VH×ΔVH
=−C×VH×ΔVH …(3)
システム電圧VHが変動すると、MG1,MG2のトルク変動に繋がるため、コンバータ40が使用できないバッテリレス走行時でも、システム電圧VHは電圧指令値VHrに制御されることが好ましい。
【0065】
したがって、本実施の形態では、バッテリレス走行時には、MG1およびMG2全体の入出力電力ΔP(すなわち、電力線54の入出力電力)の調整によってシステム電圧VHを制御するように、MG1,MG2の出力トルクによる電力制御を実行する。一方で、電力制御の影響によって出力可能な駆動トルクが急激に変化すると、駆動トルクの変化によって車両走行性が低下することが懸念される。
【0066】
このため、本発明の実施の形態では、以下に説明するようなバッテリレス走行制御により、システム電圧VHの制御のための電力制御性と、駆動力の変動抑制とが両立するように、MG1,MG2の出力トルクを設定する。
【0067】
図4および図5には、本発明の実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御のための機能ブロック図が示される。図4および図5に示す各機能ブロックは、HVECU70によるハードウェア処理および/またはソフトウェア処理によって実現することができる。
【0068】
図4を参照して、バッテリレス走行制御部500は、バッテリレス走行時にMG1,MG2のトルク指令値Tr1,Tr2を設定する。バッテリレス走行制御部500は、電力指令算出部510と、MGトルク換算部520と、MGトルク上下限設定部530と、駆動トルク上下限設定部540と、駆動トルク設定部550と、MGトルク換算部560と、MGトルク設定部570とを含む。
【0069】
電力指令算出部510は、システム電圧VHと、システム電圧の電圧指令値VHrとに基づいて、電力補正指令値ΔPrおよびこのΔPrを含む電力指令値Prを算出する。電力補正指令値ΔPrは、システム電圧VHを電圧指令値VHrに近付けるための、電力線54の入出力電力の変化量を示す。電力補正指令値ΔPrは、電力線54の電力が不足しているときには負値(ΔPr<0)に設定され、電力線54の電力が過剰なときには正値(ΔPr>0)に設定される。
【0070】
MGトルク換算部520は、電力指令値Prに従った電力変化量を電力線54に生じさせるための、MG1,MG2の必要トルク(以下、電力制御トルクとも称する)T1p,T2pを演算する。MGトルク換算部520は、「第1のトルク算出部」に対応する。
【0071】
MGトルク上下限設定部530は、当該制御周期における、MG1のトルク上限値T1maxおよびトルク下限値T1minと、MG2のトルク上限値T2maxおよびトルク下限値T2minとを設定する。
【0072】
トルク上限値は、たとえば、図6に示されるように、当該制御周期におけるシステム電圧およびモータジェネレータの回転数によって決まる。
【0073】
図6を参照して、MG1,MG2の各々が出力可能な上限トルクは、MG回転数およびシステム電圧に応じて変化する。同一のMG回転数の下では、システム電圧VHが低い程、出力可能な上限トルクが低下する。一方で、同一のシステム電圧下では、回転数が高くなる程、出力可能な上限トルクが低下する。
【0074】
トルクおよび/または回転数が負の範囲でも、MGトルクの絶対値と、MG回転数の絶対値と、システム電圧VHとの間には、上記と同様の関係が成立する。したがって、各制御周期において、システム電圧VHおよび回転数(Ng,Ne)に照らして、トルク上限値T1max,T2maxおよび/またはトルク下限値T1min,T2minを設定できる。
【0075】
あるいは、回転要素の過高回転やMG1,MG2の過高温等からの部品・機器保護の観点から、トルク(絶対値)の増大を制限するために、トルク上限値T1max,T2maxおよび/またはトルク下限値T1min,T2minが設定されてもよい。
【0076】
また、急峻なトルク変動を抑制するために、前回の制御周期における出力トルクからの変化量を所定値以下に制限するように、MG1のトルク上下限値T1max,T1minおよびMG2のトルク上下限値T2max,T2minが設定されてもよい。
【0077】
MGトルク上下限設定部530は、上記のような観点を総合して、各制御周期において、当該制御周期でのトルク上限値T1max,T2maxおよびトルク下限値T1min,T2minを設定する。
【0078】
再び図4を参照して、駆動トルク上下限設定部540は、MGトルク上下限設定部530によって設定されたMGトルクの上下限範囲と、MGトルク換算部520によって設定された電力制御トルクT1p,T2pとに基づいて、駆動トルクTpの上下限範囲を設定する。具体的には、駆動トルク上下限設定部540は、図5に示す機能ブロック図に従って、駆動トルク上限値Tpmaxおよび駆動トルク下限値Tpminを算出する。
【0079】
図5を参照して、駆動トルク上下限設定部540は、上下限値演算部542,544と、レート処理部546とを含む。
【0080】
駆動トルク上下限設定部542は、電力制御なしのときに出力可能な駆動トルクTpの範囲を算出する。すなわち、駆動トルク上下限設定部542は、トルク上限値T1max,T2maxおよびトルク下限値T1min,T2minに基づいて、駆動トルク上限値Tpmax(o)および駆動トルク下限値Tpmin(o)を算出する。
【0081】
駆動トルク上下限設定部545は、電力制御ありのときに出力可能な駆動トルクTpの範囲を算出する。すなわち、駆動トルク上下限設定部545は、MG1およびMG2による電力制御トルクT1p,T2pを確保した上で、MG1,MG2の出力トルクをMGトルク上下限設定部530による上下限範囲内としたときにおける、駆動トルクTpの上下限値を算出する。具体的には、トルク上下限値T1max,T1minから電力制御トルクT1pを減算した上下限値と、トルク上下限値T2max,T2minから電力制御トルクT2pを減算した上下限値に基づいて、駆動トルク上限値Tpmax(p)および駆動トルク下限値Tpmin(p)を算出する。
【0082】
レート処理部546は、駆動トルク上限値Tpmax(p)およびTpmax(o)の差分ΔTp(ΔTp=Tpmax(o)−Tpmax(p))を算出する。トルク差分ΔTpは、電力制御を実行することによる駆動トルクTpの低下量に相当する。そして、レート処理部546は、トルク差分ΔTpについて時間軸に対する変化量を抑制するレート処理を実行するとともに、レート処理されたトルク差分ΔTp*に基づいて、駆動トルク上限値TpmaxおよびTpminを算出する。レート処理については、ΔTpの増加側および減少側の両方で実行することが可能であるが、トルク振動を抑制する観点からは、特に、駆動トルクの増加時、すなわち、ΔTpの減少側(ΔTp*前回値<ΔTp今回値)のときに限定して、レート処理を実行することが好ましい。
【0083】
再び図4を参照して、駆動トルク設定部550は、駆動トルク上下限設定部540によって設定された駆動トルクの上下限範囲内(Tpmax〜Tpmin)で、要求トルクTp*0に最も近いトルクを、駆動トルク指令値Tp*に設定する。
【0084】
要求トルクTp*0は、ハイブリッド車両20の車両状態(代表的には、車速Vおよびアクセル開度Acc)に基づいて設定される、ユーザ要求に対応した車両駆動力を発生するための駆動軸トルクに相当する。
【0085】
MGトルク換算部560は、駆動トルク設定部550によって設定された駆動トルク指令値Tp*を、MG1,MG2の出力トルクに換算する。これにより、MG1,MG2の駆動力制御トルクT1d,T2dが算出される。MGトルク換算部560は「第2のトルク算出部」に対応する。
【0086】
MGトルク設定部570は、MGトルク換算部560によって設定された駆動力制御トルクT1d,T2dと、MGトルク換算部520によって設定された電力制御トルクT1p,T2pとの和に従って、MG1,MG2のトルク指令値T1r,T2rを設定する。
【0087】
次に、図4および図5に示した機能ブロック図に係るバッテリレス走行制御を実現するための制御処理を、図7および図8のフローチャートを用いて説明する。
【0088】
図7および図8に示すフローチャートによる制御処理は、バッテリレス走行制御時に、所定の制御周期毎に実行される。なお、図7および図8に示した各ステップにおける制御処理は、HVECU70によるソフトウェア処理および/またはハードウェア処理によって実行されるものとする。
【0089】
図7を参照して、HVECU70は、ステップS100により、バッテリ異常によってバッテリ50の充放電が禁止されている状態であるか否かを判定する。そして、充放電禁止時(S100のYES判定時)には、HVECU70は、ステップS102により、SMR55をオフする。さらに、バッテリレス走行制御のための以降のステップS105〜S170が実行される。
【0090】
一方、HVECU70は、バッテリ50が使用できるとき(S100のNO判定時)には、バッテリレス走行制御のための以降のステップS105〜S170をスキップする。
【0091】
HVECU70は、ステップS105では、MG1トルクおよびMG2トルクの上下限値を設定する。ステップS105の処理は、図4のMGトルク上下限設定部530の機能に相当する。これにより、今回の制御周期における、オリジナルのトルク上限値T1max,T2maxおよびトルク下限値T1min,T2minが設定される。
【0092】
さらに、HVECU70は、ステップS110により、システム電圧VHを電圧指令値VHrに制御するための電力指令値Prを算出する。ステップS110による処理は、図4の電力指令算出部510の機能に相当する。たとえば、電力指令値Prは、下記(4)式に従って設定される。
【0093】
Pr=ΔPr+Ploss+Pax …(4)
式(4)中において、電力補正指令値ΔPrは、電圧偏差(VH−VHr)に対してPID制御演算を実行した制御演算値を示す。Plossは、MG1,MG2による損失電力である。たとえば、Plossは、MG1およびMG2のそれぞれについて、回転数の関数として設定することができる。また、Paxは、電力線54の電力を使用して動作する補機負荷の消費電力である。
【0094】
VHr>VHのときには、電力線54の電力が不足しているので、電力指令値Prは、PID制御演算によって負方向に変化する。反対に、VHr<VHのときには、電力線54の電力が過剰であるので、電力指令値Prは、PID制御演算によって正方向に変化する。
【0095】
HVECU70は、ステップS120では、電力指令値Prに基づいて、MG1,MG2の電力制御トルクT1p,T2pを算出する。ステップS120による処理は、図4のMGトルク換算部520の機能に相当する。
【0096】
電力制御トルクT1p,T2pは、駆動軸トルクに影響を与えることなく、電力指令値Prに従った電力変化量を電力線54に生じさせるための、MG1,MG2の出力トルクに相当する。電力制御トルクT1p,T2pは、下記のように求めることができる。
【0097】
まず、(1)式で、Tp=0と置くとともに、Tm=T2pおよびTg=T1pを代入することによって、下記(5)式が得られる。
【0098】
0=T2p×Gr−T1p×(1/ρ) …(5)
(5)式より、電力制御トルクT1pおよびT2pの間には、下記(6)式の関係が成立することが理解される。
【0099】
T1p=T2p×ρ×Gr …(6)
さらに、(2)式において、ΔP=Prとし、Tm=T2pとし、Tgに(6)式のT1pを代入することにより、下記(7)式が得られる。
【0100】
Pr=T2p×Nm+T2p×ρ×Gr×Ng
=T2p×(Nm+(ρ×Gr×Ng)) …(7)
(7)式より、MG2の電力制御トルクT2pは、下記(8)式で示されることが理解される。
【0101】
T2p=Pr/(Nm+(ρ×Gr×Ng)) …(8)
また、(8)式および(6)式から、MG1の電力制御トルクT1pは下記(9)式で示される。
【0102】
T1p=Pr×(ρ×Gr)/(Nm+(ρ×Gr×Ng)) …(9)
MG1およびMG2が電力制御トルクT1p,T2pを出力すると、駆動軸32aに作用するトルクを変化させることなく(Tp=0)、電力指令値Prに従った電力を電力線54に対して入出力することができる。
【0103】
続いて、HVECU70は、ステップS140により、駆動トルクTpの上下限値を算出する。ステップS140は、図8に示すステップS142〜S148を含む。
【0104】
図8を参照して、HVECU70は、ステップS142では、電力制御ありのときの駆動トルク上限値Tpmax(p)および駆動トルク下限値Tpmin(p)を算出する。以下に説明するステップS142での処理によって、図5の駆動トルク上下限設定部545の機能が実現される。
【0105】
ステップS142では、オリジナルのトルク上限値T1maxおよびトルク下限値T1minから電力制御トルクT1pを減算することによって、MG1について修正後のトルク上限値T1max♯およびトルク下限値T1min♯が求められる。同様に、オリジナルのトルク上限値T2maxおよびトルク下限値T2minから電力制御トルクT2pを減算することによって、MGについて修正後のトルク上限値T2max♯およびトルク下限値T2min♯が求められる。
【0106】
トルク上限値T1max♯およびトルク下限値T1min♯によって、電力制御トルクT1pを確保した上で、オリジナルのトルク上下限範囲T1max〜T1minに収まるように、駆動トルク確保のためにMG1が出力可能なトルク範囲が示される。同様に、トルク上限値T2max♯およびトルク下限値T2min♯によって、電力制御トルクT2pを確保した上で、駆動トルク確保のためにMG2が出力可能なトルク範囲が示される。
【0107】
ステップS140では、ステップS130で修正されたトルク上下限値に基づいて、駆動軸32aに出力される駆動トルクの上下限値が演算される。
【0108】
ここで、電力バランスを保った上で、すなわちΔPr=0として駆動トルクTpを発生するためのMG1,MG2のトルクTg,Tmの関係は、(2)式においてΔP=0と置くことで、下記(10)式で示される。
【0109】
Tg=−(Nm/Ng)×Tm …(10)
(10)式を(1)式に代入してTgを消去することにより、ΔP=0としたときの駆動トルクTpとMG2トルクTmとの関係は、(11)式で示される。
【0110】
Tp=Tm×Gr+(1/ρ×Nm/Ng)×Tm
=(Gr+(1/ρ×Nm/Ng))×Tm …(11)
(11)式に、MG2についてのトルク上限値T2max♯およびT2min♯を代入することにより、電力制御ありのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax2,Tpmin2が得られる。
【0111】
同様に、(10)式を(1)式に代入してTmを消去することにより、ΔP=0としたときの駆動トルクTpとMG1トルクTgとの関係は、(12)式で示される。
【0112】
Tp=−(Ng/Nm×Gr)×Tg−(1/ρ)×Tg
=−(1/ρ+Gr×Ng/Nm)×Tg …(12)
したがって、(12)式に、MG1についてのトルク上限値T1max♯およびT1min♯を代入することにより、電力制御ありのときのMG1トルク制限からの駆動トルクTpの上下限値Tpmax1,Tpmin1が得られる。
【0113】
図9を参照して、MG1トルク制限からの駆動トルクの上下限範囲(Tpmax1〜Tpmin1)と、MG2トルク制限からの駆動トルクの上下限範囲(Tpmax2〜Tpmin2)とが重なる範囲が、電力制御ありのときの駆動トルクの上下限範囲に設定される。すなわち、駆動トルク上限値Tpmax(p)=min(Tpmax1,Tpmax2)であり、駆動トルク下限値Tpmin(p)=max(Tpmin1,Tpmin2)である。これにより、電力制御トルクT1p,T2pの出力を確保した上で、駆動軸32aに出力可能な駆動トルクTpの上下限範囲(Tpmax(p)〜Tpmin(p))が定められる。
【0114】
HVECU70は、ステップS144では、電力制御なしのときの駆動トルク上限値Tpmax(o)および駆動トルク下限値Tpmin(o)を算出する。
【0115】
ステップS144では、上述の(11)式に、電力制御を考慮しない、すなわち、ステップS105で設定されたオリジナルのMG2トルク上下限値T2max,T2minを代入することにより、電力制御なしのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax2,Tpmin2を算出する。さらに、上述の(12)式に、ステップS105で設定されたオリジナルのMG1トルク上下限値T1max,T1minを代入することにより、電力制御なしのときのMG2トルク制限からの駆動トルクTpの上下限値Tpmax1,Tpmin1が得られる。
【0116】
そして、電力制御ありのときと同様にして、電力制御なしのときにおける、駆動軸32aに出力可能な駆動トルクTpの上下限範囲(Tpmax(o)〜Tpmin(o))が定められる。ステップS144での処理によって、図5の駆動トルク上下限設定部542の機能が実現される。
【0117】
さらに、HVECU70は、ステップS145では、電力制御の有/無によるトルク差分ΔTpを算出する。以下では、代表的に、駆動トルク上限値Tpmax(o)およびTpmax(p)の差をトルク差分ΔTpとする(ΔTp=Tpmax(o)−ΔTpmax(p))。
【0118】
HVECU70は、ステップS146では、トルク差分ΔTpに基づいて、レート処理されたトルク差分ΔTp*を算出する。レート処理は、制御周期間での変化量(ΔTpの減少側)を所定制限値LM以下に制限する。これにより、駆動力(駆動トルク)増加側のΔTp*の時間方向の変化が抑制される。なお、駆動トルク減少側(すなわち、ΔTpの増加側)については、レート処理は実行されない。したがって、ΔTpの今回値が前回の周期でのΔTp*よりも大きいときは、今回の制御周期におけるΔTp*=ΔTpとなる。
【0119】
この結果、前回の制御周期における前回値ΔTp*(−1)に対して、今回の制御周期におけるΔTp*は、下記(13)式の範囲内に制限される。
【0120】
ΔTp*(−1)−LM≦ΔTp* …(13)
すなわち、ステップS145で算出されたΔTpについて、ΔTp*(−1)−LM≦ΔTpであれば、ΔTp*=ΔTpに設定される。ただし、ΔTp<ΔTp*(−1)−LMのときには、ΔTp*=ΔTp*(−1)−LMに制限される。
【0121】
ステップS145,S146では、駆動トルク下限値Tpmin(o)およびTpmin(p)についても同様に、電力制御の有/無によるトルク差分ΔTpおよびレート処理されたΔTp*が算出される。
【0122】
HVECU70は、ステップS148では、レート処理されたトルク差分ΔTp*を反映して、最終的な駆動トルクTpの上下限値Tpmax,Tpminを算出する。
【0123】
具体的には、電力制御なしのときの駆動トルク上限値Tpmax(o)と、トルク上限値に関してレート処理されたトルク差分ΔTp*とによって、下記(14)式によって、駆動トルク上限値Tpmaxが設定される。
【0124】
Tpmax=Tpmax(o)−ΔTp* …(14)
駆動トルク下限値Tpminは、電力制御なしのときの駆動トルク下限値Tpmin(o)によって、下記(15)式に従って設定される。
【0125】
Tpmin=Tpmin(o) …(15)
このように、ステップS145〜S148の処理は、図5のレート処理部546の機能に対応する。
【0126】
再び、図7を参照して、HVECU70は、ステップS150により、ステップS140により算出された駆動トルク上下限値Tpmax,Tpminとユーザからの要求トルクTp*0とに基づいて、駆動トルク指令値Tp♯を設定する。ステップS150の処理は、図4の駆動トルク設定部550の機能に対応する。
【0127】
ステップS150では、駆動トルク指令値Tp*は、ステップS140で設定された駆動トルクTpの上下限範囲(Tpmax〜Tpmin)内で、要求トルクTp*0に最も近い値に設定される。具体的には、Tp*0>Tpmaxのときには、Tp*=Tpmaxに設定される。同様に、Tp*0<Tpminのときには、Tp*=Tpminに設定される。また、Tpmin<Tp*0<Tpmaxのときには、Tp*=Tp*0に設定されることになる。
【0128】
そしてHVECU70は、ステップS160により、ステップS150で設定された駆動トルク指令値Tp*から、MG1,MG2の駆動力制御トルクT1d,T2dを算出する。駆動力制御トルクT1d,T2dは、電力制御を実行した上で、駆動トルク指令値Tp*に従った駆動トルクを発生するためのMG1,MG2の出力トルクに相当する。ステップS160による処理は、図4のMGトルク換算部560の機能に対応する。
【0129】
駆動力制御トルクT1dは、式(12)において、Tp=Tp*とし、Tg=T1dとすることによって、式(16)によって求められる。
【0130】
T1d=−Tp*/(1/ρ+Gr×Ng/Nm) …(16)
同様に、駆動力制御トルクT2dは、式(11)において、Tp=Tp*とし、Tm=T2dとすることによって、式(17)によって求められる。
【0131】
T2d=Tp*/(Gr+(1/ρ×Nm/Ng)) …(17)
HVECU70は、ステップS170により、MG1,MG2のトルク指令値Tr1,Tr2を設定する。ステップS170の処理は、図4のMGトルク設定部570の機能に対応する。
【0132】
ステップS170では、下記の式(18),(19)に基づいて、最終的なトルク指令値T1r,T2rが算出される。
【0133】
T1r=T1p+T1d …(18)
T2r=T2p+T2d …(19)
そして、図2に示した電気システムによって、MG1,MG2の出力トルクが、トルク指令値T1r,T2rに従って制御される。
【0134】
図10は、本発明の実施の形態によるバッテリレス走行制御による駆動トルクの設定例を説明する動作波形図である。図10では、駆動トルク上限値に従って駆動トルクTpを確保したケースが例示されている。
【0135】
図10を参照して、駆動トルクTp(o)は、電力制御なしのときの駆動トルク上限値に対応する。この例では、駆動トルクTp(o)がシステム電圧VHを考慮することなく、上限値いっぱいの一定値に設定される。このときのシステム電圧VH(o)は、電力制御が行われないため、図示するように変動する。
【0136】
一方で、システム電圧VHのフィードバックによる電力制御を実行したときに設定される駆動トルクが、図中Tp(p)で示される。駆動トルクTp(p)は、電力制御トルクによってMG1,MG2のトルク上下限値が修正されることによって駆動トルク上限値も変化することから、システム電圧VHを制御するように変動する。
【0137】
しかしながら、駆動トルクTp(p)に従って駆動トルク指令値Tp*を設定すると、図示されるように駆動トルクの変化が比較的大きくなるため、車両走行性が低下する虞がある。
【0138】
このため本発明の実施の形態によるバッテリレス走行制御では、駆動トルク上下限値の設定の際に、電力制御の有/無によるトルク差分(ΔTp)をレート処理したトルク差分ΔTp*を反映して、駆動トルク上下限値を設定する。この結果、駆動トルク上限値いっぱいで駆動トルク指令値Tp*が設定された場合にも、Tp*の時間軸方向での変化を緩やかにすることができる。
【0139】
このように、本実施の形態によるハイブリッド車両の制御装置によるバッテリレス走行制御では、システム電圧VHを制御するための電力制御トルクT1p,T2pを出力する余地を確保しつつ、駆動トルクが急激に変化しないように制約して、駆動トルクの上下限範囲を設定することができる。したがって、コンバータ40が使用できないバッテリレス走行においても、システム電圧VHを安定化するための電力制御を実行しつつ、電力制御の影響による駆動トルクの変動を抑制するように、MG1,MG2の出力トルクを設定できる。この結果、車両走行性が向上する。
【0140】
さらに、MG1,MG2の両方のトルクによって電力制御を行なうので、電力制御を実現した上でMG1,MG2から出力可能なトルク範囲が広くなる。この結果、バッテリレス走行における車両駆動力が確保し易くなる。また、システム電圧VHを制御することによって、システム電圧VHの変動に起因したMG1,MG2のトルク変動を抑制することができる。したがって、これらの面からも走行性能を向上させることができる。
【0141】
なお、本発明が適用されるハイブリッド車両の構成は、図1の例示に限定されるものではない点について確認的に記載する。具体的には、内燃機関と、内燃機関の動力の少なくとも一部を用いて発電する発電機と、発電機の発電電力が供給される電力線の電力によって駆動軸にトルクを出力する電動機とを用いてバッテリレス走行を実行することが可能な構成であれば、本実施の形態で説明したバッテリレス走行制御に従って、発電機および電動機の出力トルクを適切に設定することができる。
【0142】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【産業上の利用可能性】
【0143】
本発明は、車載蓄電装置を不使用とした走行モードを有するハイブリッド車両の走行制御に適用することができる。
【符号の説明】
【0144】
20 ハイブリッド車両、22 エンジン、23 クランク角センサ、24 エンジンECU、26 クランクシャフト、28 トーショナルダンパ、30 動力分割機構、31,65 サンギヤ、31a サンギヤ軸、32,66 リングギヤ、32a リングギヤ軸(駆動軸)、33,67 ピニオンギヤ、34 キャリア、37 ギヤ機構、38 デファレンシャルギヤ、39a,39b 駆動輪、40 コンバータ、41,42 インバータ、43,44 回転位置検出センサ、45 モータECU、48 出力軸(MG2)、50 バッテリ、52 バッテリECU、54 電力ライン、60 変速機、61 ケース、70 HVECU、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、112,122 中性点、180 電圧センサ、500 バッテリレス走行制御部、510 電力指令算出部、520,560 MGトルク換算部、530 MGトルク上下限設定部、540 駆動トルク上下限設定部、550 駆動トルク設定部、570 トルク設定部、C0 平滑コンデンサ、MG1 モータジェネレータ(発電機)、MG2 モータジェネレータ(電動機)、Ne エンジン回転数、Ng MG1回転数、Nm MG2回転数、Pr 電力指令値、SP シフトポジション、T1r,T2r トルク指令値、T1p,T2p 電力制御トルク、T1max,T2max MGトルク上限値(オリジナル)、T1max♯,T2max♯ MGトルク上限値(修正値)、T1min,T2min トルク下限値(オリジナル)、T1min♯,T2min♯ トルク下限値(修正値)、T1d,T2d 駆動力制御トルク、Te エンジントルク、Tep 直達トルク、Tg MG1トルク、Tm MG2トルク、Tp*0 要求トルク、Tp* 駆動トルク指令値、Tpmax 駆動トルク上限値(最終)、Tpmax(o) 駆動トルク上限値(電力制御なし)、Tpmax(p) 駆動トルク上限値(電力制御あり)、Tpmin 駆動トルク下限値(最終)、Tpmin(o) 駆動トルク下限値(電力制御なし)、Tpmin(p) 駆動トルク下限値(電力制御あり)、VH システム電圧、VHr 電圧指令値。
【特許請求の範囲】
【請求項1】
駆動軸との間に動力伝達経路を有するように構成された内燃機関と、
前記内燃機関の動力の少なくとも一部を用いて発電するための発電機と、
前記駆動軸との間に動力伝達経路を有するように構成された電動機と、
電力線に対して、開閉器を介して電気的に接続される蓄電装置と、
前記発電機の出力トルクが第1のトルク指令値と一致するように、前記電力線および前記発電機の間で双方向の電力変換を実行するための第1の電力変換器と、
前記電動機の出力トルクが第2のトルク指令値と一致するように、前記電力線および前記電動機の間で双方向の電力変換を実行するための第2の電力変換器と、
前記開閉器が開放された走行状態において、車両走行のための要求トルクに応じて、前記発電機および前記電動機の出力トルクを設定するための走行制御部とを備え、
前記走行制御部は、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線の電圧を電圧指令値を一致させるように前記電力線の電力変化量を制御するための前記電動機および前記発電機による電力制御トルクを算出するともに、前記電動機および前記発電機が前記電力制御トルクを出力したときと、前記電動機および前記発電機が前記電力制御トルクを出力しないときとの間での前記駆動軸に出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して決定された前記駆動軸のトルク上下限範囲内で前記要求トルクに最も近いトルクが前記駆動軸に作用するように、前記第1および前記第2のトルク指令値を設定する、ハイブリッド車両。
【請求項2】
前記走行制御部は、
前記電圧を前記電圧指令値に制御するための前記電力線の入出力電力の指令値を算出する電力指令算出部と、
前記駆動軸に作用するトルクに影響を与えずに、前記発電機および前記電動機から前記電力線に対して前記指令値に従った電力を入出力するための、前記発電機の電力制御トルクおよび前記電動機の電力制御トルクを演算するための第1のトルク算出部と、
前記発電機および電動機の第1のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第1のトルク範囲を設定するための第1のトルク上下限設定部と、
前記第1のトルク上下限範囲から前記電動機および前記発電機の前記電力制御トルクが減算された、前記発電機および電動機の第2のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第2のトルク範囲を設定するための第2のトルク上下限設定部と、
前記第1および第2のトルク範囲の差分の時間軸方向の変化を制約したトルク値と、前記第1のトルク範囲とに基づいて、前記駆動軸のトルク上下限範囲を算出するレート処理部と、
設定された前記駆動軸のトルク上下限範囲と、車両走行のための要求トルクとに基づいて、前記駆動軸のトルク指令値を設定するための駆動トルク設定部とを含む、請求項1記載のハイブリッド車両。
【請求項3】
前記走行制御部は、
前記電力線に対する入出力電力を変えずに前記駆動軸のトルク指令値を前記駆動軸に作用させるための、前記発電機の駆動力トルクおよび前記電動機の駆動力トルクを演算するための第2のトルク算出部と、
前記発電機および前記電動機のそれぞれの前記電力制御トルクおよび前記駆動力トルクの和に従って、前記第1および前記第2のトルク指令値を設定するためのトルク設定部とをさらに含む、請求項2記載のハイブリッド車両。
【請求項4】
第1から第3の回転要素のうちのいずれか2つの回転要素の回転数が決定されると残余の1つの回転要素の回転数が決定されるとともに、前記第1から第3の回転要素のうちのいずれか2つの回転要素に入出力される動力に基づいて残余の1つの回転要素に動力を入出力するように構成される差動装置をさらに備え、
前記第1の回転要素は、前記内燃機関の出力軸と機械的に連結され、
前記第2の回転要素は、前記発電機の出力軸と機械的に連結され、
前記第3の回転要素は、前記駆動軸および前記電動機の出力軸と機械的に連結される、請求項1〜3のいずれか1項に記載のハイブリッド車両。
【請求項5】
前記走行制御部は、前記トルク範囲の差分の時間軸に対する変化量を、前記駆動軸に出力可能なトルクの増加方向に対応する前記差分の変化方向に限って制約する処理によって得られた値を反映して、前記駆動軸のトルク上下限範囲を決定する、請求項1記載のハイブリッド車両。
【請求項6】
駆動軸との間に動力伝達経路を有するように構成された内燃機関と、前記内燃機関の動力の少なくとも一部を用いて発電するための発電機と、前記駆動軸との間に動力伝達経路を有するように構成された電動機と、電力線に対して開閉器を介して電気的に接続される蓄電装置と、前記発電機の出力トルクが第1のトルク指令値と一致するように、前記電力線および前記発電機の間で双方向の電力変換を実行するための第1の電力変換器と、前記電動機の出力トルクが第2のトルク指令値と一致するように、前記電力線および前記電動機の間で双方向の電力変換を実行するための第2の電力変換器とを備えたハイブリッド車両の制御方法であって、
前記制御方法は、
走行中に前記蓄電装置の異常が検知された場合に、前記開閉器を開放するステップと、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線の電圧を電圧指令値を一致させるように前記電力線の電力変化量を制御するための前記電動機および前記発電機による電力制御トルクを演算するステップと、
前記電動機および前記発電機が前記電力制御トルクを出力したときと、前記電動機および前記発電機が前記電力制御トルクを出力しないときとの間での前記駆動軸に出力可能なトルク範囲の差分を算出するステップと、
当該差分の時間軸に対する変化量を制約した値を反映して前記駆動軸のトルク上下限範囲を決定するステップと、
決定された前記トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが前記駆動軸に発生するように、前記第1および前記第2のトルク指令値を設定するステップとを備える、ハイブリッド車両の制御方法。
【請求項7】
前記算出するステップは、
前記発電機および前記電動機の第1のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第1のトルク範囲を設定するステップと、
前記第1のトルク上下限範囲から前記電動機および前記発電機の前記電力制御トルクが減算された、前記発電機および電動機の第2のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第2のトルク範囲を設定するステップと、
前記第1および第2のトルク範囲の差分を算出するステップとを含み、
前記決定するステップは、
算出された前記差分の時間軸方向の変化を制約したトルク値を算出するステップと、
前記トルク値と前記第1のトルク範囲とに基づいて、前記駆動軸のトルク上下限範囲を算出するステップとを含む、請求項6記載のハイブリッド車両の制御方法。
【請求項8】
前記演算するステップは、
前記電圧を前記電圧指令値に制御するための前記電力線の入出力電力の指令値を算出するステップと、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線に対して前記指令値に従った電力を入出力するための、前記発電機の電力制御トルクおよび前記電動機の電力制御トルクを演算するステップとを含む、請求項6または7に記載のハイブリッド車両の制御方法。
【請求項9】
前記設定するステップは、
設定された前記駆動軸のトルク上下限範囲と前記要求トルクとに基づいて、前記駆動軸のトルク指令値を設定するステップと、
前記電力線に対する入出力電力を変えずに前記駆動軸のトルク指令値を前記駆動軸に作用させるための、前記発電機の駆動力トルクおよび前記電動機の駆動力トルクを演算するステップと、
前記発電機および前記電動機のそれぞれの前記電力制御トルクおよび前記駆動力トルクの和に従って、前記第1および前記第2のトルク指令値を設定するステップとを含む、請求項6または7に記載のハイブリッド車両の制御方法。
【請求項10】
前記決定するステップは、前記トルク範囲の差分の時間軸に対する変化量を、前記駆動軸に出力可能なトルクの増加方向に対応する前記差分の変化方向に限って制約する処理によって得られた値を反映して、前記駆動軸のトルク上下限範囲を決定する、請求項6記載のハイブリッド車両の制御方法。
【請求項1】
駆動軸との間に動力伝達経路を有するように構成された内燃機関と、
前記内燃機関の動力の少なくとも一部を用いて発電するための発電機と、
前記駆動軸との間に動力伝達経路を有するように構成された電動機と、
電力線に対して、開閉器を介して電気的に接続される蓄電装置と、
前記発電機の出力トルクが第1のトルク指令値と一致するように、前記電力線および前記発電機の間で双方向の電力変換を実行するための第1の電力変換器と、
前記電動機の出力トルクが第2のトルク指令値と一致するように、前記電力線および前記電動機の間で双方向の電力変換を実行するための第2の電力変換器と、
前記開閉器が開放された走行状態において、車両走行のための要求トルクに応じて、前記発電機および前記電動機の出力トルクを設定するための走行制御部とを備え、
前記走行制御部は、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線の電圧を電圧指令値を一致させるように前記電力線の電力変化量を制御するための前記電動機および前記発電機による電力制御トルクを算出するともに、前記電動機および前記発電機が前記電力制御トルクを出力したときと、前記電動機および前記発電機が前記電力制御トルクを出力しないときとの間での前記駆動軸に出力可能なトルク範囲の差分を算出し、さらに、当該差分の時間軸に対する変化量を制約した値を反映して決定された前記駆動軸のトルク上下限範囲内で前記要求トルクに最も近いトルクが前記駆動軸に作用するように、前記第1および前記第2のトルク指令値を設定する、ハイブリッド車両。
【請求項2】
前記走行制御部は、
前記電圧を前記電圧指令値に制御するための前記電力線の入出力電力の指令値を算出する電力指令算出部と、
前記駆動軸に作用するトルクに影響を与えずに、前記発電機および前記電動機から前記電力線に対して前記指令値に従った電力を入出力するための、前記発電機の電力制御トルクおよび前記電動機の電力制御トルクを演算するための第1のトルク算出部と、
前記発電機および電動機の第1のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第1のトルク範囲を設定するための第1のトルク上下限設定部と、
前記第1のトルク上下限範囲から前記電動機および前記発電機の前記電力制御トルクが減算された、前記発電機および電動機の第2のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第2のトルク範囲を設定するための第2のトルク上下限設定部と、
前記第1および第2のトルク範囲の差分の時間軸方向の変化を制約したトルク値と、前記第1のトルク範囲とに基づいて、前記駆動軸のトルク上下限範囲を算出するレート処理部と、
設定された前記駆動軸のトルク上下限範囲と、車両走行のための要求トルクとに基づいて、前記駆動軸のトルク指令値を設定するための駆動トルク設定部とを含む、請求項1記載のハイブリッド車両。
【請求項3】
前記走行制御部は、
前記電力線に対する入出力電力を変えずに前記駆動軸のトルク指令値を前記駆動軸に作用させるための、前記発電機の駆動力トルクおよび前記電動機の駆動力トルクを演算するための第2のトルク算出部と、
前記発電機および前記電動機のそれぞれの前記電力制御トルクおよび前記駆動力トルクの和に従って、前記第1および前記第2のトルク指令値を設定するためのトルク設定部とをさらに含む、請求項2記載のハイブリッド車両。
【請求項4】
第1から第3の回転要素のうちのいずれか2つの回転要素の回転数が決定されると残余の1つの回転要素の回転数が決定されるとともに、前記第1から第3の回転要素のうちのいずれか2つの回転要素に入出力される動力に基づいて残余の1つの回転要素に動力を入出力するように構成される差動装置をさらに備え、
前記第1の回転要素は、前記内燃機関の出力軸と機械的に連結され、
前記第2の回転要素は、前記発電機の出力軸と機械的に連結され、
前記第3の回転要素は、前記駆動軸および前記電動機の出力軸と機械的に連結される、請求項1〜3のいずれか1項に記載のハイブリッド車両。
【請求項5】
前記走行制御部は、前記トルク範囲の差分の時間軸に対する変化量を、前記駆動軸に出力可能なトルクの増加方向に対応する前記差分の変化方向に限って制約する処理によって得られた値を反映して、前記駆動軸のトルク上下限範囲を決定する、請求項1記載のハイブリッド車両。
【請求項6】
駆動軸との間に動力伝達経路を有するように構成された内燃機関と、前記内燃機関の動力の少なくとも一部を用いて発電するための発電機と、前記駆動軸との間に動力伝達経路を有するように構成された電動機と、電力線に対して開閉器を介して電気的に接続される蓄電装置と、前記発電機の出力トルクが第1のトルク指令値と一致するように、前記電力線および前記発電機の間で双方向の電力変換を実行するための第1の電力変換器と、前記電動機の出力トルクが第2のトルク指令値と一致するように、前記電力線および前記電動機の間で双方向の電力変換を実行するための第2の電力変換器とを備えたハイブリッド車両の制御方法であって、
前記制御方法は、
走行中に前記蓄電装置の異常が検知された場合に、前記開閉器を開放するステップと、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線の電圧を電圧指令値を一致させるように前記電力線の電力変化量を制御するための前記電動機および前記発電機による電力制御トルクを演算するステップと、
前記電動機および前記発電機が前記電力制御トルクを出力したときと、前記電動機および前記発電機が前記電力制御トルクを出力しないときとの間での前記駆動軸に出力可能なトルク範囲の差分を算出するステップと、
当該差分の時間軸に対する変化量を制約した値を反映して前記駆動軸のトルク上下限範囲を決定するステップと、
決定された前記トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが前記駆動軸に発生するように、前記第1および前記第2のトルク指令値を設定するステップとを備える、ハイブリッド車両の制御方法。
【請求項7】
前記算出するステップは、
前記発電機および前記電動機の第1のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第1のトルク範囲を設定するステップと、
前記第1のトルク上下限範囲から前記電動機および前記発電機の前記電力制御トルクが減算された、前記発電機および電動機の第2のトルク上下限範囲に基づいて、前記駆動軸に出力可能な第2のトルク範囲を設定するステップと、
前記第1および第2のトルク範囲の差分を算出するステップとを含み、
前記決定するステップは、
算出された前記差分の時間軸方向の変化を制約したトルク値を算出するステップと、
前記トルク値と前記第1のトルク範囲とに基づいて、前記駆動軸のトルク上下限範囲を算出するステップとを含む、請求項6記載のハイブリッド車両の制御方法。
【請求項8】
前記演算するステップは、
前記電圧を前記電圧指令値に制御するための前記電力線の入出力電力の指令値を算出するステップと、
前記駆動軸に作用するトルクに影響を与えずに、前記電力線に対して前記指令値に従った電力を入出力するための、前記発電機の電力制御トルクおよび前記電動機の電力制御トルクを演算するステップとを含む、請求項6または7に記載のハイブリッド車両の制御方法。
【請求項9】
前記設定するステップは、
設定された前記駆動軸のトルク上下限範囲と前記要求トルクとに基づいて、前記駆動軸のトルク指令値を設定するステップと、
前記電力線に対する入出力電力を変えずに前記駆動軸のトルク指令値を前記駆動軸に作用させるための、前記発電機の駆動力トルクおよび前記電動機の駆動力トルクを演算するステップと、
前記発電機および前記電動機のそれぞれの前記電力制御トルクおよび前記駆動力トルクの和に従って、前記第1および前記第2のトルク指令値を設定するステップとを含む、請求項6または7に記載のハイブリッド車両の制御方法。
【請求項10】
前記決定するステップは、前記トルク範囲の差分の時間軸に対する変化量を、前記駆動軸に出力可能なトルクの増加方向に対応する前記差分の変化方向に限って制約する処理によって得られた値を反映して、前記駆動軸のトルク上下限範囲を決定する、請求項6記載のハイブリッド車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−162134(P2012−162134A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−22819(P2011−22819)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]