
ハイブリッド車両の制御装置およびそれを備えるハイブリッド車両、ならびにハイブリッド車両の制御方法

【課題】EV走行とHV走行とを切替えて走行可能なハイブリッド車両において、EV走行領域の変更に関する利用者の意図を反映可能とする。
【解決手段】ECU22の走行制御部52は、車両の要求出力や要求トルク、車両速度等のハイブリッド車両の走行状態を示す物理量がエンジン始動しきい値を超えると、エンジンを停止してモータジェネレータのみを用いて走行するEV走行モードからエンジンを動作させて走行するHV走行モードへ切替える。エンジン始動しきい値変更部54は、EVスイッチから信号REQを受けると、EVスイッチからの運転者の意図を反映してエンジン始動しきい値を変更する。
【解決手段】ECU22の走行制御部52は、車両の要求出力や要求トルク、車両速度等のハイブリッド車両の走行状態を示す物理量がエンジン始動しきい値を超えると、エンジンを停止してモータジェネレータのみを用いて走行するEV走行モードからエンジンを動作させて走行するHV走行モードへ切替える。エンジン始動しきい値変更部54は、EVスイッチから信号REQを受けると、EVスイッチからの運転者の意図を反映してエンジン始動しきい値を変更する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両駆動力を発生する内燃機関および電動機を搭載したハイブリッド車両の制御装置およびそれを備えるハイブリッド車両、ならびにハイブリッド車両の制御方法に関する。
【背景技術】
【0002】
特開平11−122713号公報(特許文献1)は、ハイブリッド車両におけるエンジンの運転の開始および停止を適正化する運転制御装置を開示する。この運転制御装置においては、エンジンに対する要求動力が所定の判定値以上になると、エンジンを始動させる。駆動軸への動力の伝達経路の状態を切替えるシフト手段が車両の駆動軸に介装され、シフト手段による動力伝達経路の状態に応じて、エンジン始動を判定するための上記判定値が変更される。
【0003】
この運転制御装置によれば、動力伝達経路の状態とエンジンの運転状態との関係を明らかにしてエンジンの運転の開始および停止を適正に判断し、エンジンの運転を適正に制御することができるとされる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−122713号公報
【特許文献2】特開2009−47107号公報
【特許文献3】特開2001−140673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のハイブリッド車両においては、走行状態に応じて、エンジンを停止してモータのみを用いての走行(以下「EV(Electric Vehicle)走行」とも称する。)と、エンジンを動作させての走行(以下「HV(Hybrid Vehicle)走行」とも称する。)とを切替えて走行することができる。
【0006】
このようなハイブリッド車両の利用者の中には、EV走行からHV走行への移行を遅らせてEV走行領域を拡大したいとの意図を有する利用者も多い。一方、EV走行領域を拡大すると、蓄電装置からの出力電力が大きくなることにより、エンジン始動(エンジンのクランキング)に利用可能な電力が制限される。その結果、エンジンの始動性が悪化し、エンジン始動に伴なうショック(以下「エンジン始動ショック」とも称する。)が大きくなる。
【0007】
EV走行領域の拡大に伴なうエンジン始動ショックの増大をどの程度まで許容できるかは、利用者によって異なる。特許文献1に記載のハイブリッド車両は、車両側の状態(シフトポジション)に応じてエンジン始動の判定値を変更するものであり、どの程度までエンジン始動ショックを許容してEV走行領域を変更するかについての利用者の意図を十分に反映できるものではない。
【0008】
それゆえに、この発明の目的は、EV走行とHV走行とを切替えて走行可能なハイブリッド車両において、EV走行領域の変更に関する利用者の意図を反映可能とすることである。
【課題を解決するための手段】
【0009】
この発明によれば、制御装置は、ハイブリッド車両の制御装置である。ハイブリッド車両は、内燃機関と、蓄電装置と、電動機とを含む。内燃機関は、車両駆動力を発生する。電動機は、蓄電装置から電力を受けて車両駆動力を発生する。制御装置は、走行制御部と、変更部とを備える。走行制御部は、ハイブリッド車両の走行状態を示す物理量が内燃機関の始動しきい値を超えると、内燃機関を停止して電動機のみを用いて走行する第1の走行モード(EV走行モード)から内燃機関を動作させて走行する第2の走行モード(HV走行モード)へ切替える。変更部は、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更する。
【0010】
ハイブリッド車両の走行状態を示す物理量とは、たとえば、車両に対する要求出力や要求トルク、車両速度等である。運転者の意図とは、運転者がどの程度までエンジン始動ショックを許容してEV走行領域を変更したいかである。
【0011】
好ましくは、変更部は、ハイブリッド車両の走行レンジの変更を伴なうことなく内燃機関の始動しきい値を変更する。
【0012】
好ましくは、制御装置は、内燃機関の始動しきい値を運転者が設定するための設定部をさらに備える。
【0013】
好ましくは、ハイブリッド車両は、蓄電装置から電力を受けて内燃機関を始動するもう1つの電動機をさらに含む。
【0014】
さらに好ましくは、制御装置は、測定器と、補正部とをさらに備える。測定器は、第1の走行モードから第2の走行モードへ切替わるときの内燃機関の始動時にハイブリッド車両に発生するショックの大きさを測定可能である。補正部は、測定部により測定されるショックの測定値に基づいて内燃機関の始動しきい値を補正する。
【0015】
好ましくは、制御装置は、第1の走行モードでの走行を運転者が要求するための操作部をさらに備える。変更部は、操作部により第1の走行モードでの走行が要求されているとき、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更する。
【0016】
さらに好ましくは、操作部は、さらに、内燃機関の始動しきい値の変更を運転者が入力可能に構成される。
【0017】
また、この発明によれば、ハイブリッド車両は、車両駆動力を発生する内燃機関と、蓄電装置と、蓄電装置から電力を受けて車両駆動力を発生する電動機と、上述したいずれかの制御装置とを備える。
【0018】
また、この発明によれば、制御方法は、ハイブリッド車両の制御方法である。ハイブリッド車両は、内燃機関と、蓄電装置と、電動機とを備える。内燃機関は、車両駆動力を発生する。電動機は、蓄電装置から電力を受けて車両駆動力を発生する。そして、制御方法は、ハイブリッド車両の走行状態を示す物理量が内燃機関の始動しきい値を超えると、内燃機関を停止して電動機のみを用いて走行する第1の走行モードから内燃機関を動作させて走行する第2の走行モードへ切替えるステップと、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更するステップとを含む。
【発明の効果】
【0019】
この発明によれば、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値が変更されるので、EV走行領域の変更に関する利用者の意図を車両の走行制御に反映させることができる。
【図面の簡単な説明】
【0020】
【図1】この発明の実施の形態1によるハイブリッド車両の全体ブロック図である。
【図2】図1に示すECUの機能ブロック図である。
【図3】EVスイッチがオン操作されているときのエンジン始動しきい値の一例を示した図である。
【図4】ECUにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。
【図5】実施の形態2によるハイブリッド車両の全体ブロック図である。
【図6】図5に示すECUの機能ブロック図である。
【図7】エンジン始動しきい値が補正(学習)される様子の一例を示した図である。
【図8】実施の形態2におけるECUにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0022】
[実施の形態1]
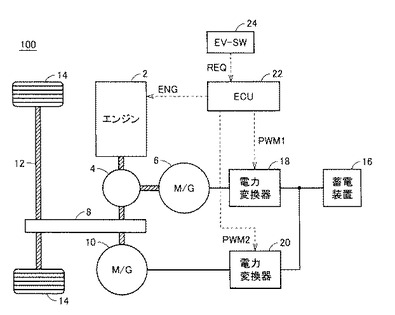
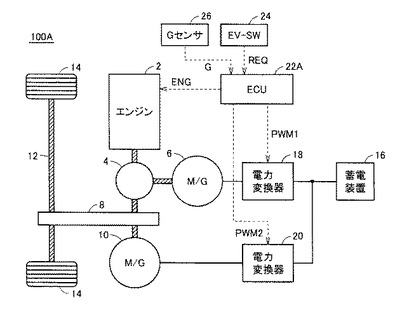
図1は、この発明の実施の形態1によるハイブリッド車両の全体ブロック図である。図1を参照して、ハイブリッド車両100は、エンジン2と、動力分割装置4と、モータジェネレータ6,10と、伝達ギヤ8と、駆動軸12と、車輪14とを備える。また、ハイブリッド車両100は、蓄電装置16と、電力変換器18,20と、電子制御ユニット(以下「ECU(Electronic Control Unit)」と称する。)22と、EVスイッチ24とをさらに備える。
【0023】
動力分割装置4は、エンジン2、モータジェネレータ6および伝達ギヤ8に結合されてこれらの間で動力を分配する。たとえば、サンギヤ、プラネタリキャリヤおよびリングギヤの3つの回転軸を有する遊星歯車を動力分割装置4として用いることができ、この3つの回転軸がモータジェネレータ6、エンジン2および伝達ギヤ8の回転軸にそれぞれ接続される。また、モータジェネレータ10の回転軸は、伝達ギヤ8の回転軸に連結される。すなわち、モータジェネレータ10と伝達ギヤ8とは、同一の回転軸を有し、その回転軸が動力分割装置4のリングギヤに接続される。
【0024】
エンジン2が発生する運動エネルギーは、動力分割装置4によってモータジェネレータ6と伝達ギヤ8とに分配される。すなわち、エンジン2は、駆動軸12に動力を伝達する伝達ギヤ8を駆動するとともにモータジェネレータ6を駆動する動力源としてハイブリッド車両100に組込まれる。そして、モータジェネレータ6は、エンジン2によって駆動される発電機として動作し、かつ、エンジン2の始動を行ない得る電動機として動作するものとしてハイブリッド車両100に組込まれる。また、モータジェネレータ10は、駆動軸12に動力を伝達する伝達ギヤ8を駆動する動力源としてハイブリッド車両100に組込まれる。
【0025】
蓄電装置16は、再充電可能な直流電源であり、たとえば、ニッケル水素やリチウムイオン等の二次電池によって構成される。蓄電装置16は、電力変換器18,20へ電力を供給する。また、蓄電装置16は、モータジェネレータ6および/または10の発電時、電力変換器18および/または20から電力を受けて充電される。
【0026】
なお、蓄電装置16として、大容量のキャパシタも採用可能であり、モータジェネレータ6,10により発電された電力を一時的に蓄え、その蓄えた電力をモータジェネレータ6,10へ供給可能な電力バッファであれば如何なるものでもよい。また、蓄電装置16の電圧を昇圧して電力変換器18,20へ出力する昇圧コンバータを蓄電装置16と電力変換器18,20との間に設けてもよい。
【0027】
電力変換器18は、ECU22からの信号PWM1に基づいて、モータジェネレータ6により発電された電力を直流電力に変換して蓄電装置16へ出力する。電力変換器20は、ECU22からの信号PWM2に基づいて、蓄電装置16から供給される直流電力を交流電力に変換してモータジェネレータ10へ出力する。なお、電力変換器18は、エンジン2の始動時、信号PWM1に基づいて、蓄電装置16から供給される直流電力を交流電力に変換してモータジェネレータ6へ出力する。また、電力変換器20は、車両の制動時や下り斜面での加速度低減時、信号PWM2に基づいて、モータジェネレータ10により発電された電力を直流電力に変換して蓄電装置16へ出力する。なお、電力変換器18,20は、たとえば、三相分のスイッチング素子を含むインバータによって構成される。
【0028】
モータジェネレータ6,10は、交流電動機であり、たとえば、ロータに永久磁石が埋設された三相交流同期電動機によって構成される。モータジェネレータ6は、エンジン2により生成された運動エネルギーを電気エネルギーに変換して電力変換器18へ出力する。また、モータジェネレータ6は、電力変換器18から受ける三相交流電力によって駆動力を発生し、エンジン2の始動を行なう。
【0029】
モータジェネレータ10は、電力変換器20から受ける三相交流電力によって車両の駆動トルクを発生する。また、モータジェネレータ10は、車両の制動時や下り斜面での加速度低減時、運動エネルギーや位置エネルギーとして車両に蓄えられた力学的エネルギーを電気エネルギーに変換して電力変換器20へ出力する。
【0030】
エンジン2は、燃料の燃焼による熱エネルギーをピストンやロータなどの運動子の運動エネルギーに変換し、その変換された運動エネルギーを動力分割装置4へ出力する。たとえば、運動子がピストンであり、その運動が往復運動であれば、いわゆるクランク機構を介して往復運動が回転運動に変換され、ピストンの運動エネルギーが動力分割装置4に伝達される。
【0031】
ECU22は、予め記憶されたプログラムをCPU(Central Processing Unit)で実行することによるソフトウェア処理および/または専用の電子回路によるハードウェア処理により、電力変換器18,20およびエンジン2を制御する。具体的には、ECU22は、電力変換器18,20を駆動するための信号PWM1,PWM2を生成して電力変換器18,20へそれぞれ出力し、エンジン2を制御するための信号ENGを生成してエンジン2へ出力する。
【0032】
また、ECU22は、車両の走行状態を示す物理量(車両の要求出力や、要求トルク、速度等)が所定のしきい値を超えると、エンジン2を停止してモータジェネレータ10のみを用いて走行するEV走行モードからエンジン2を動作させて走行するHV走行モードへ切替える(以下、上記のしきい値を「エンジン始動しきい値」と称する。)。さらに、ECU22は、運転者によりEVスイッチ24(後述)が操作されると、HV走行モードでの走行を制限する。一例として、ECU22は、車両速度やアクセルペダルの操作量が所定値以下であり蓄電装置16の残存容量(SOC)が所定値以上であれば、エンジン2の作動を停止や禁止にしたりエンジン始動しきい値を拡大したりすることによって、エンジン2の作動を制限する。
【0033】
ここで、ECU22は、運転者によるEVスイッチ24の操作に応じてエンジン始動しきい値を変更する。エンジン始動しきい値を変更する方法については、種々の方法を取り得るが、ここでは一例として、複数レベルのエンジン始動しきい値が予め準備され、ECU22は、EVスイッチ24の操作時間や操作回数等に応じて変化するEVスイッチ24からの信号REQに基づいて、運転者の意図に応じたエンジン始動しきい値を選択する。あるいは、EVスイッチ24の操作時間や操作回数等に応じてエンジン始動しきい値を連続的に変更可能としてもよい。
【0034】
なお、エンジン始動しきい値のレベルは、エンジン始動ショックに基づいて決定することができる。すなわち、EV走行領域を拡大すると、蓄電装置16からの出力電力が大きくなることにより、エンジン始動(エンジン2のクランキング)に利用可能な電力が制限される。その結果、エンジン2の始動性が悪化し、エンジン始動ショックが大きくなる。そこで、エンジン始動ショックの許容範囲に応じてエンジン始動しきい値を決定することができる。なお、このECU22の構成については、後ほど詳しく説明する。
【0035】
EVスイッチ24は、EV走行モードでの走行を運転者が要求するための操作入力部である。運転者によりEVスイッチ24がオン操作(たとえば押下)されると、EVスイッチ24からECU22へ信号REQが出力され、ECU22によりエンジン2の作動が制限される。ここで、EVスイッチ24は、運転者によるEVスイッチ24の操作時間や操作回数等に応じてECU22においてエンジン始動しきい値を変更可能なように、ECU22へ出力される信号REQを変化させる。このように、このハイブリッド車両100では、運転者は、EVスイッチ24の操作時間や操作回数等によって、エンジン始動しきい値すなわちEV走行領域を変更することができる。
【0036】
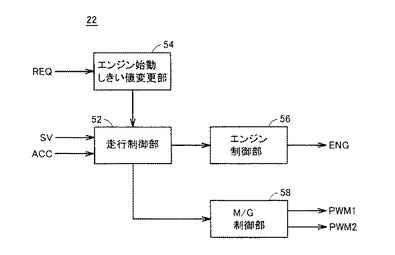
図2は、図1に示したECU22の機能ブロック図である。図2を参照して、ECU22は、走行制御部52と、エンジン始動しきい値変更部54と、エンジン制御部56と、モータジェネレータ(M/G)制御部58とを含む。
【0037】
走行制御部52は、車両の走行状態に基づいて、車両の走行モード(EV走行モード/HV走行モード)の切替えを制御する。一例として、走行制御部52は、車両の要求出力に基づいて走行モードを切替える。具体的には、走行制御部52は、車両速度SVおよびアクセルペダルの踏込量に対応するアクセル開度ACCに基づいて車両の要求出力を算出する。また、走行制御部52は、エンジン始動しきい値変更部54からエンジン始動しきい値を受ける。そして、走行制御部52は、算出された要求出力がエンジン始動しきい値を超えると、EV走行モードからHV走行モードへ切替える。
【0038】
エンジン始動しきい値変更部54は、EVスイッチ24(図1)から受ける信号REQに基づいてエンジン始動しきい値を変更する。具体的には、エンジン始動しきい値変更部54は、EVスイッチ24から信号REQを受けていないときは、エンジン始動しきい値をデフォルト値に設定し、EVスイッチ24から信号REQを受けると、その受けた信号REQに対応して予め準備された値にエンジン始動しきい値を変更(拡大)する。
【0039】
すなわち、エンジン始動しきい値変更部54は、走行レンジの変更を伴なうことなく、また、走行レンジの変更に拘わらず、EV走行領域についての運転者の意図を反映するように、EVスイッチ24からの信号REQに応じてエンジン始動しきい値を変更する。
【0040】
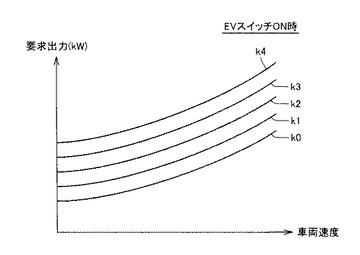
図3は、EVスイッチ24がオン操作されているときのエンジン始動しきい値の一例を示した図である。図3を参照して、横軸は車両速度を示し、縦軸は車両の要求出力(kW)を示す。要求パワーがエンジン始動しきい値を超えると、エンジン2が始動され、EV走行モードからHV走行モードへ切替わる。
【0041】
線k0は、エンジン始動しきい値のデフォルト値である。そして、たとえば、EVスイッチ24が押ボタンから成る場合、EVスイッチ24が1回長押しされると、エンジン始動しきい値は線k1に変更され、EVスイッチ24が2回長押しされると線k2に変更される。さらに、EVスイッチ24が3回長押しされると、エンジン始動しきい値は線k3に変更され、EVスイッチ24が4回長押しされると線k4に変更される。
【0042】
再び図2を参照して、エンジン制御部56は、走行制御部52によりHV走行モードが選択されているとき、エンジン2を作動させるための信号ENGを生成してエンジン2へ出力する。走行制御部52によりEV走行モードが選択されているときは、エンジン制御部56は、エンジン2を停止させる。
【0043】
モータジェネレータ制御部58は、モータジェネレータ10に対応する電力変換器20を駆動するための信号PWM2を生成して電力変換器20へ出力する。また、走行制御部52によりEV走行モードからHV走行モードに切替えられると、モータジェネレータ制御部58は、モータジェネレータ6によってエンジン2を始動するように電力変換器18を駆動するための信号PWM1を生成して電力変換器18へ出力する。また、エンジン2の出力を用いてモータジェネレータ6により発電するときは、モータジェネレータ6を電力変換器18により回生駆動するための信号PWM1を生成して電力変換器18へ出力する。
【0044】
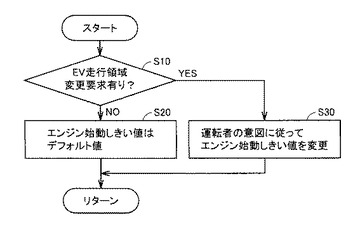
図4は、ECU22により実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。図4を参照して、ECU22は、EVスイッチ24(図1)から受ける信号REQに基づいて、EV走行領域の変更要求(エンジン始動しきい値の変更要求)が有ったか否かを判定する(ステップS10)。
【0045】
ECU22が信号REQを受けておらず、EV走行領域の変更要求は無いものと判定されると(ステップS10においてNO)、ECU22は、エンジン始動しきい値をデフォルト値(図3の線k0)に設定する(ステップS20)。一方、EV走行領域の変更要求が有ったものと判定されると(ステップS10においてYES)、ECU22は、EV走行領域についての運転者の意図が反映されたEVスイッチ24からの信号REQに基づいてエンジン始動しきい値を変更する(ステップS30)。具体的には、図3に例示したように、ECU22は、予め準備された複数レベルのエンジン始動しきい値の中から、EVスイッチ24の操作に応じてエンジン始動しきい値を選択する。
【0046】
以上のように、この実施の形態1においては、車両の走行状態を示す物理量(車両の要求出力や、要求トルク、速度等)がエンジン始動しきい値を超えると、エンジン2を始動させてEV走行モードからHV走行モードへ切替えられる。そして、EVスイッチ24により運転者の意図を反映して内燃機関の始動しきい値を変更可能であるので、この実施の形態1によれば、EV走行領域の変更に関する利用者の意図を車両の走行制御に反映させることができる。
【0047】
[実施の形態2]
この実施の形態2では、EV走行からHV走行へ切替わるときのエンジン始動ショックが測定され、その測定値を用いて、予め準備されたエンジン始動しきい値が補正(学習)される。これにより、EV走行領域に関する利用者の意図をより正確に車両の走行制御に反映させることが可能となる。
【0048】
図5は、実施の形態2によるハイブリッド車両の全体ブロック図である。図5を参照して、このハイブリッド車両100Aは、図1に示した実施の形態1によるハイブリッド車両100の構成において、加速度センサ(Gセンサ)26をさらに備え、ECU22に代えてECU22Aを備える。
【0049】
加速度センサ26は、このハイブリッド車両100Aのショックレベルを測定する。具体的には、加速度センサ26は、EV走行モードからHV走行モードへ切替わるときのエンジン2の始動時にハイブリッド車両100Aに発生するショックの大きさ(エンジン始動ショック)を測定し、その測定結果をECU22Aへ出力する。この加速度センサ26には、種々のタイプの加速度センサを用いることができる。
【0050】
ECU22Aは、エンジン2の始動時に加速度センサ26からエンジン始動ショックの測定値を取得し、その測定されたエンジン始動ショックに基づいてエンジン始動しきい値を補正する。より詳しくは、EVスイッチ24により変更されたエンジン始動しきい値に対応するエンジン始動ショック(設定値)と、加速度センサ26により測定されるエンジン始動ショック(測定値)との偏差に基づいて、エンジン始動しきい値が補正される。たとえば、エンジン始動ショックの測定値が設定値よりも小さかった場合には、そのときの走行状態近傍におけるエンジン始動しきい値を大きくするようにエンジン始動しきい値が補正される。
【0051】
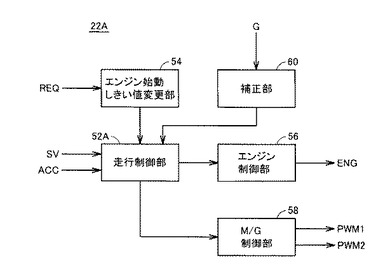
図6は、図5に示したECU22Aの機能ブロック図である。図6を参照して、ECU22Aは、図2に示した実施の形態1におけるECU22の構成において、補正部60をさらに含み、走行制御部52に代えて走行制御部52Aを含む。
【0052】
補正部60は、加速度センサ26(図5)からエンジン始動ショックの測定値Gを受ける。そして、補正部60は、そのエンジン始動ショックの測定値Gに基づいてエンジン始動しきい値を補正する。
【0053】
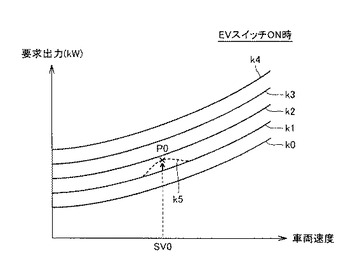
図7は、エンジン始動しきい値が補正(学習)される様子の一例を示した図である。なお、この図7は、実施の形態1において説明した図3に対応するものである。図7を参照して、EVスイッチ24(図5)によりエンジン始動しきい値が線k1に設定されているときに、車両速度SV0で走行中にエンジン2が始動したものとする。
【0054】
このときのエンジン始動ショックが加速度センサ26によって測定される。この図7では、エンジン2の始動時に実際に発生したショックが、線k1におけるエンジン始動ショックよりも小さかった場合が示されている。そして、加速度センサ26によって測定されたエンジン始動ショックと線k1との差に基づいて、このときの車両速度SV0におけるエンジン始動しきい値がP0に補正されるとともに、車両速度SV0近傍においてもエンジン始動しきい値が引き上げられる(点線k5)。
【0055】
再び図6を参照して、走行制御部52Aは、補正部60によって補正されたエンジン始動しきい値を車両の要求出力が超えると、EV走行モードからHV走行モードへ切替える。なお、走行制御部52Aのその他の機能は、図2に示した実施の形態1における走行制御部52と同じである。また、ECU22Aのその他の機能も、実施の形態1におけるECU22と同じである。
【0056】
図8は、実施の形態2におけるECU22Aにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。図8を参照して、このフローチャートは、図4に示したフローチャートにおいてステップS40〜S100をさらに含む。すなわち、ステップS20またはS30の処理が実行されると、ECU22Aは、カウンタKに初期値1を設定する(ステップS40)。
【0057】
その後、車両の要求出力がエンジン始動しきい値を超えることによりEV走行モードからHV走行モードへ移行されると(ステップS50においてYES)、ECU22Aは、加速度センサ26(図5)により測定されたエンジン始動ショックを取得する(ステップS60)。そして、ECU22Aは、その取得したエンジン始動ショック(測定値)を、EVスイッチ24により設定されたエンジン始動しきい値に対応するエンジン始動ショック(設定値)と比較し、それらの差が所定の判定値αよりも小さいか否かを判定する(ステップS70)。
【0058】
エンジン始動ショックについての測定値と設定値との差が判定値α以上であると判定されると(ステップS70においてNO)、ECU22Aは、エンジン始動ショックの測定値から設定値を差引いた値に基づいて、そのときの車両速度に基づいてエンジン始動しきい値を補正する(ステップS80)。たとえば、図7に説明したようにエンジン始動しきい値が補正される。
【0059】
一方、ステップS70において、エンジン始動ショックについての測定値と設定値との差が判定値αよりも小さいと判定されると(ステップS70においてYES)、ECU22Aは、カウンタKを1だけカウントアップする(ステップS90)。そして、ECU22Aは、カウンタKが予め定められた値k0となったか否かを判定し(ステップS100)、カウンタKが値k0に達したときはステップS110へ処理を進め、カウンタKが値k0に達していないときは、ステップS50へ処理を戻す。
【0060】
なお、上記においては、EVスイッチ24によりEV走行領域の変更が要求されているときにエンジン始動しきい値を補正(学習)するものとしたが、EVスイッチ24の操作に拘わらず、エンジン始動しきい値の上記補正(学習)を行なうようにしてもよい。
【0061】
以上のように、この実施の形態2においては、EV走行からHV走行へ切替わるときのエンジン始動ショックが測定され、その測定値に基づいてエンジン始動しきい値が補正(学習)される。したがって、この実施の形態2によれば、EV走行領域に関する利用者の意図をより正確に車両の走行制御に反映させることが可能となる。
【0062】
なお、上記の各実施の形態においては、車両の要求出力に基づいて走行モードを切替えるものとしたが、車両の要求トルクや車両速度に基づいて走行モードを切替えるようにしてもよい。すなわち、車両の要求トルク(あるいは車両速度)についてのエンジン始動しきい値を要求トルク(車両速度)が超えると、EV走行モードからHV走行モードへ切替えるものであってもよい。
【0063】
また、上記においては、EVスイッチ24がオン操作されているときにエンジン始動しきい値を変更可能としたが、EVスイッチ24の操作に拘わらずエンジン始動しきい値を変更可能としてもよい。
【0064】
また、車両の走行状況(たとえば、高速走行主体や市街地走行主体など)に基づいてエンジン始動しきい値を学習するようにしてもよい。たとえば、走行速度から市街地走行主体の走行であると判断される場合には、エンジン始動しきい値を全体的に高めるように学習させてもよい。
【0065】
また、上記においては、EVスイッチ24からエンジン始動しきい値の設定を変更可能としたが、エンジン始動しきい値の設定を変更するための操作入力部をEVスイッチ24とは別に設けてもよい。
【0066】
また、上記においては、動力分割装置4によりエンジン2の動力を伝達ギヤ8とモータジェネレータ6とに分割して伝達可能なシリーズ/パラレル型のハイブリッド車両について説明したが、この発明は、その他の形式のハイブリッド車両にも適用可能である。すなわち、たとえば、モータジェネレータ6を駆動するためにのみエンジン2を用い、モータジェネレータ10でのみ車両の駆動力を発生する、いわゆるシリーズ型のハイブリッド車両や、エンジンを主動力として必要に応じてモータがアシストするとともに、そのモータを発電機としても用いて蓄電装置を充電可能な1モータ型のハイブリッド車両などにもこの発明は適用可能である。
【0067】
なお、上記において、エンジン2は、この発明における「内燃機関」の一実施例に対応し、モータジェネレータ10は、この発明における「電動機」の一実施例に対応する。また、エンジン始動しきい値変更部54は、この発明における「変更部」の一実施例に対応し、EVスイッチ24は、この発明における「設定部」および「操作部」の一実施例に対応する。さらに、モータジェネレータ6は、この発明における「もう1つの電動機」の一実施例に対応し、加速度センサ26は、この発明における「測定器」の一実施例に対応する。
【0068】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0069】
2 エンジン、4 動力分割装置、6,10 モータジェネレータ、8 伝達ギヤ、12 駆動軸、14 車輪、16 蓄電装置、18,20 電力変換器、22,22A ECU、24 EVスイッチ、26 加速度センサ、52,52A 走行制御部、54 エンジン始動しきい値変更部、56 エンジン制御部、58 モータジェネレータ制御部、60 補正部、100,100A ハイブリッド車両。
【技術分野】
【0001】
この発明は、車両駆動力を発生する内燃機関および電動機を搭載したハイブリッド車両の制御装置およびそれを備えるハイブリッド車両、ならびにハイブリッド車両の制御方法に関する。
【背景技術】
【0002】
特開平11−122713号公報(特許文献1)は、ハイブリッド車両におけるエンジンの運転の開始および停止を適正化する運転制御装置を開示する。この運転制御装置においては、エンジンに対する要求動力が所定の判定値以上になると、エンジンを始動させる。駆動軸への動力の伝達経路の状態を切替えるシフト手段が車両の駆動軸に介装され、シフト手段による動力伝達経路の状態に応じて、エンジン始動を判定するための上記判定値が変更される。
【0003】
この運転制御装置によれば、動力伝達経路の状態とエンジンの運転状態との関係を明らかにしてエンジンの運転の開始および停止を適正に判断し、エンジンの運転を適正に制御することができるとされる(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−122713号公報
【特許文献2】特開2009−47107号公報
【特許文献3】特開2001−140673号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のハイブリッド車両においては、走行状態に応じて、エンジンを停止してモータのみを用いての走行(以下「EV(Electric Vehicle)走行」とも称する。)と、エンジンを動作させての走行(以下「HV(Hybrid Vehicle)走行」とも称する。)とを切替えて走行することができる。
【0006】
このようなハイブリッド車両の利用者の中には、EV走行からHV走行への移行を遅らせてEV走行領域を拡大したいとの意図を有する利用者も多い。一方、EV走行領域を拡大すると、蓄電装置からの出力電力が大きくなることにより、エンジン始動(エンジンのクランキング)に利用可能な電力が制限される。その結果、エンジンの始動性が悪化し、エンジン始動に伴なうショック(以下「エンジン始動ショック」とも称する。)が大きくなる。
【0007】
EV走行領域の拡大に伴なうエンジン始動ショックの増大をどの程度まで許容できるかは、利用者によって異なる。特許文献1に記載のハイブリッド車両は、車両側の状態(シフトポジション)に応じてエンジン始動の判定値を変更するものであり、どの程度までエンジン始動ショックを許容してEV走行領域を変更するかについての利用者の意図を十分に反映できるものではない。
【0008】
それゆえに、この発明の目的は、EV走行とHV走行とを切替えて走行可能なハイブリッド車両において、EV走行領域の変更に関する利用者の意図を反映可能とすることである。
【課題を解決するための手段】
【0009】
この発明によれば、制御装置は、ハイブリッド車両の制御装置である。ハイブリッド車両は、内燃機関と、蓄電装置と、電動機とを含む。内燃機関は、車両駆動力を発生する。電動機は、蓄電装置から電力を受けて車両駆動力を発生する。制御装置は、走行制御部と、変更部とを備える。走行制御部は、ハイブリッド車両の走行状態を示す物理量が内燃機関の始動しきい値を超えると、内燃機関を停止して電動機のみを用いて走行する第1の走行モード(EV走行モード)から内燃機関を動作させて走行する第2の走行モード(HV走行モード)へ切替える。変更部は、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更する。
【0010】
ハイブリッド車両の走行状態を示す物理量とは、たとえば、車両に対する要求出力や要求トルク、車両速度等である。運転者の意図とは、運転者がどの程度までエンジン始動ショックを許容してEV走行領域を変更したいかである。
【0011】
好ましくは、変更部は、ハイブリッド車両の走行レンジの変更を伴なうことなく内燃機関の始動しきい値を変更する。
【0012】
好ましくは、制御装置は、内燃機関の始動しきい値を運転者が設定するための設定部をさらに備える。
【0013】
好ましくは、ハイブリッド車両は、蓄電装置から電力を受けて内燃機関を始動するもう1つの電動機をさらに含む。
【0014】
さらに好ましくは、制御装置は、測定器と、補正部とをさらに備える。測定器は、第1の走行モードから第2の走行モードへ切替わるときの内燃機関の始動時にハイブリッド車両に発生するショックの大きさを測定可能である。補正部は、測定部により測定されるショックの測定値に基づいて内燃機関の始動しきい値を補正する。
【0015】
好ましくは、制御装置は、第1の走行モードでの走行を運転者が要求するための操作部をさらに備える。変更部は、操作部により第1の走行モードでの走行が要求されているとき、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更する。
【0016】
さらに好ましくは、操作部は、さらに、内燃機関の始動しきい値の変更を運転者が入力可能に構成される。
【0017】
また、この発明によれば、ハイブリッド車両は、車両駆動力を発生する内燃機関と、蓄電装置と、蓄電装置から電力を受けて車両駆動力を発生する電動機と、上述したいずれかの制御装置とを備える。
【0018】
また、この発明によれば、制御方法は、ハイブリッド車両の制御方法である。ハイブリッド車両は、内燃機関と、蓄電装置と、電動機とを備える。内燃機関は、車両駆動力を発生する。電動機は、蓄電装置から電力を受けて車両駆動力を発生する。そして、制御方法は、ハイブリッド車両の走行状態を示す物理量が内燃機関の始動しきい値を超えると、内燃機関を停止して電動機のみを用いて走行する第1の走行モードから内燃機関を動作させて走行する第2の走行モードへ切替えるステップと、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値を変更するステップとを含む。
【発明の効果】
【0019】
この発明によれば、ハイブリッド車両の運転者の意図を反映して内燃機関の始動しきい値が変更されるので、EV走行領域の変更に関する利用者の意図を車両の走行制御に反映させることができる。
【図面の簡単な説明】
【0020】
【図1】この発明の実施の形態1によるハイブリッド車両の全体ブロック図である。
【図2】図1に示すECUの機能ブロック図である。
【図3】EVスイッチがオン操作されているときのエンジン始動しきい値の一例を示した図である。
【図4】ECUにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。
【図5】実施の形態2によるハイブリッド車両の全体ブロック図である。
【図6】図5に示すECUの機能ブロック図である。
【図7】エンジン始動しきい値が補正(学習)される様子の一例を示した図である。
【図8】実施の形態2におけるECUにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
【0022】
[実施の形態1]
図1は、この発明の実施の形態1によるハイブリッド車両の全体ブロック図である。図1を参照して、ハイブリッド車両100は、エンジン2と、動力分割装置4と、モータジェネレータ6,10と、伝達ギヤ8と、駆動軸12と、車輪14とを備える。また、ハイブリッド車両100は、蓄電装置16と、電力変換器18,20と、電子制御ユニット(以下「ECU(Electronic Control Unit)」と称する。)22と、EVスイッチ24とをさらに備える。
【0023】
動力分割装置4は、エンジン2、モータジェネレータ6および伝達ギヤ8に結合されてこれらの間で動力を分配する。たとえば、サンギヤ、プラネタリキャリヤおよびリングギヤの3つの回転軸を有する遊星歯車を動力分割装置4として用いることができ、この3つの回転軸がモータジェネレータ6、エンジン2および伝達ギヤ8の回転軸にそれぞれ接続される。また、モータジェネレータ10の回転軸は、伝達ギヤ8の回転軸に連結される。すなわち、モータジェネレータ10と伝達ギヤ8とは、同一の回転軸を有し、その回転軸が動力分割装置4のリングギヤに接続される。
【0024】
エンジン2が発生する運動エネルギーは、動力分割装置4によってモータジェネレータ6と伝達ギヤ8とに分配される。すなわち、エンジン2は、駆動軸12に動力を伝達する伝達ギヤ8を駆動するとともにモータジェネレータ6を駆動する動力源としてハイブリッド車両100に組込まれる。そして、モータジェネレータ6は、エンジン2によって駆動される発電機として動作し、かつ、エンジン2の始動を行ない得る電動機として動作するものとしてハイブリッド車両100に組込まれる。また、モータジェネレータ10は、駆動軸12に動力を伝達する伝達ギヤ8を駆動する動力源としてハイブリッド車両100に組込まれる。
【0025】
蓄電装置16は、再充電可能な直流電源であり、たとえば、ニッケル水素やリチウムイオン等の二次電池によって構成される。蓄電装置16は、電力変換器18,20へ電力を供給する。また、蓄電装置16は、モータジェネレータ6および/または10の発電時、電力変換器18および/または20から電力を受けて充電される。
【0026】
なお、蓄電装置16として、大容量のキャパシタも採用可能であり、モータジェネレータ6,10により発電された電力を一時的に蓄え、その蓄えた電力をモータジェネレータ6,10へ供給可能な電力バッファであれば如何なるものでもよい。また、蓄電装置16の電圧を昇圧して電力変換器18,20へ出力する昇圧コンバータを蓄電装置16と電力変換器18,20との間に設けてもよい。
【0027】
電力変換器18は、ECU22からの信号PWM1に基づいて、モータジェネレータ6により発電された電力を直流電力に変換して蓄電装置16へ出力する。電力変換器20は、ECU22からの信号PWM2に基づいて、蓄電装置16から供給される直流電力を交流電力に変換してモータジェネレータ10へ出力する。なお、電力変換器18は、エンジン2の始動時、信号PWM1に基づいて、蓄電装置16から供給される直流電力を交流電力に変換してモータジェネレータ6へ出力する。また、電力変換器20は、車両の制動時や下り斜面での加速度低減時、信号PWM2に基づいて、モータジェネレータ10により発電された電力を直流電力に変換して蓄電装置16へ出力する。なお、電力変換器18,20は、たとえば、三相分のスイッチング素子を含むインバータによって構成される。
【0028】
モータジェネレータ6,10は、交流電動機であり、たとえば、ロータに永久磁石が埋設された三相交流同期電動機によって構成される。モータジェネレータ6は、エンジン2により生成された運動エネルギーを電気エネルギーに変換して電力変換器18へ出力する。また、モータジェネレータ6は、電力変換器18から受ける三相交流電力によって駆動力を発生し、エンジン2の始動を行なう。
【0029】
モータジェネレータ10は、電力変換器20から受ける三相交流電力によって車両の駆動トルクを発生する。また、モータジェネレータ10は、車両の制動時や下り斜面での加速度低減時、運動エネルギーや位置エネルギーとして車両に蓄えられた力学的エネルギーを電気エネルギーに変換して電力変換器20へ出力する。
【0030】
エンジン2は、燃料の燃焼による熱エネルギーをピストンやロータなどの運動子の運動エネルギーに変換し、その変換された運動エネルギーを動力分割装置4へ出力する。たとえば、運動子がピストンであり、その運動が往復運動であれば、いわゆるクランク機構を介して往復運動が回転運動に変換され、ピストンの運動エネルギーが動力分割装置4に伝達される。
【0031】
ECU22は、予め記憶されたプログラムをCPU(Central Processing Unit)で実行することによるソフトウェア処理および/または専用の電子回路によるハードウェア処理により、電力変換器18,20およびエンジン2を制御する。具体的には、ECU22は、電力変換器18,20を駆動するための信号PWM1,PWM2を生成して電力変換器18,20へそれぞれ出力し、エンジン2を制御するための信号ENGを生成してエンジン2へ出力する。
【0032】
また、ECU22は、車両の走行状態を示す物理量(車両の要求出力や、要求トルク、速度等)が所定のしきい値を超えると、エンジン2を停止してモータジェネレータ10のみを用いて走行するEV走行モードからエンジン2を動作させて走行するHV走行モードへ切替える(以下、上記のしきい値を「エンジン始動しきい値」と称する。)。さらに、ECU22は、運転者によりEVスイッチ24(後述)が操作されると、HV走行モードでの走行を制限する。一例として、ECU22は、車両速度やアクセルペダルの操作量が所定値以下であり蓄電装置16の残存容量(SOC)が所定値以上であれば、エンジン2の作動を停止や禁止にしたりエンジン始動しきい値を拡大したりすることによって、エンジン2の作動を制限する。
【0033】
ここで、ECU22は、運転者によるEVスイッチ24の操作に応じてエンジン始動しきい値を変更する。エンジン始動しきい値を変更する方法については、種々の方法を取り得るが、ここでは一例として、複数レベルのエンジン始動しきい値が予め準備され、ECU22は、EVスイッチ24の操作時間や操作回数等に応じて変化するEVスイッチ24からの信号REQに基づいて、運転者の意図に応じたエンジン始動しきい値を選択する。あるいは、EVスイッチ24の操作時間や操作回数等に応じてエンジン始動しきい値を連続的に変更可能としてもよい。
【0034】
なお、エンジン始動しきい値のレベルは、エンジン始動ショックに基づいて決定することができる。すなわち、EV走行領域を拡大すると、蓄電装置16からの出力電力が大きくなることにより、エンジン始動(エンジン2のクランキング)に利用可能な電力が制限される。その結果、エンジン2の始動性が悪化し、エンジン始動ショックが大きくなる。そこで、エンジン始動ショックの許容範囲に応じてエンジン始動しきい値を決定することができる。なお、このECU22の構成については、後ほど詳しく説明する。
【0035】
EVスイッチ24は、EV走行モードでの走行を運転者が要求するための操作入力部である。運転者によりEVスイッチ24がオン操作(たとえば押下)されると、EVスイッチ24からECU22へ信号REQが出力され、ECU22によりエンジン2の作動が制限される。ここで、EVスイッチ24は、運転者によるEVスイッチ24の操作時間や操作回数等に応じてECU22においてエンジン始動しきい値を変更可能なように、ECU22へ出力される信号REQを変化させる。このように、このハイブリッド車両100では、運転者は、EVスイッチ24の操作時間や操作回数等によって、エンジン始動しきい値すなわちEV走行領域を変更することができる。
【0036】
図2は、図1に示したECU22の機能ブロック図である。図2を参照して、ECU22は、走行制御部52と、エンジン始動しきい値変更部54と、エンジン制御部56と、モータジェネレータ(M/G)制御部58とを含む。
【0037】
走行制御部52は、車両の走行状態に基づいて、車両の走行モード(EV走行モード/HV走行モード)の切替えを制御する。一例として、走行制御部52は、車両の要求出力に基づいて走行モードを切替える。具体的には、走行制御部52は、車両速度SVおよびアクセルペダルの踏込量に対応するアクセル開度ACCに基づいて車両の要求出力を算出する。また、走行制御部52は、エンジン始動しきい値変更部54からエンジン始動しきい値を受ける。そして、走行制御部52は、算出された要求出力がエンジン始動しきい値を超えると、EV走行モードからHV走行モードへ切替える。
【0038】
エンジン始動しきい値変更部54は、EVスイッチ24(図1)から受ける信号REQに基づいてエンジン始動しきい値を変更する。具体的には、エンジン始動しきい値変更部54は、EVスイッチ24から信号REQを受けていないときは、エンジン始動しきい値をデフォルト値に設定し、EVスイッチ24から信号REQを受けると、その受けた信号REQに対応して予め準備された値にエンジン始動しきい値を変更(拡大)する。
【0039】
すなわち、エンジン始動しきい値変更部54は、走行レンジの変更を伴なうことなく、また、走行レンジの変更に拘わらず、EV走行領域についての運転者の意図を反映するように、EVスイッチ24からの信号REQに応じてエンジン始動しきい値を変更する。
【0040】
図3は、EVスイッチ24がオン操作されているときのエンジン始動しきい値の一例を示した図である。図3を参照して、横軸は車両速度を示し、縦軸は車両の要求出力(kW)を示す。要求パワーがエンジン始動しきい値を超えると、エンジン2が始動され、EV走行モードからHV走行モードへ切替わる。
【0041】
線k0は、エンジン始動しきい値のデフォルト値である。そして、たとえば、EVスイッチ24が押ボタンから成る場合、EVスイッチ24が1回長押しされると、エンジン始動しきい値は線k1に変更され、EVスイッチ24が2回長押しされると線k2に変更される。さらに、EVスイッチ24が3回長押しされると、エンジン始動しきい値は線k3に変更され、EVスイッチ24が4回長押しされると線k4に変更される。
【0042】
再び図2を参照して、エンジン制御部56は、走行制御部52によりHV走行モードが選択されているとき、エンジン2を作動させるための信号ENGを生成してエンジン2へ出力する。走行制御部52によりEV走行モードが選択されているときは、エンジン制御部56は、エンジン2を停止させる。
【0043】
モータジェネレータ制御部58は、モータジェネレータ10に対応する電力変換器20を駆動するための信号PWM2を生成して電力変換器20へ出力する。また、走行制御部52によりEV走行モードからHV走行モードに切替えられると、モータジェネレータ制御部58は、モータジェネレータ6によってエンジン2を始動するように電力変換器18を駆動するための信号PWM1を生成して電力変換器18へ出力する。また、エンジン2の出力を用いてモータジェネレータ6により発電するときは、モータジェネレータ6を電力変換器18により回生駆動するための信号PWM1を生成して電力変換器18へ出力する。
【0044】
図4は、ECU22により実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。図4を参照して、ECU22は、EVスイッチ24(図1)から受ける信号REQに基づいて、EV走行領域の変更要求(エンジン始動しきい値の変更要求)が有ったか否かを判定する(ステップS10)。
【0045】
ECU22が信号REQを受けておらず、EV走行領域の変更要求は無いものと判定されると(ステップS10においてNO)、ECU22は、エンジン始動しきい値をデフォルト値(図3の線k0)に設定する(ステップS20)。一方、EV走行領域の変更要求が有ったものと判定されると(ステップS10においてYES)、ECU22は、EV走行領域についての運転者の意図が反映されたEVスイッチ24からの信号REQに基づいてエンジン始動しきい値を変更する(ステップS30)。具体的には、図3に例示したように、ECU22は、予め準備された複数レベルのエンジン始動しきい値の中から、EVスイッチ24の操作に応じてエンジン始動しきい値を選択する。
【0046】
以上のように、この実施の形態1においては、車両の走行状態を示す物理量(車両の要求出力や、要求トルク、速度等)がエンジン始動しきい値を超えると、エンジン2を始動させてEV走行モードからHV走行モードへ切替えられる。そして、EVスイッチ24により運転者の意図を反映して内燃機関の始動しきい値を変更可能であるので、この実施の形態1によれば、EV走行領域の変更に関する利用者の意図を車両の走行制御に反映させることができる。
【0047】
[実施の形態2]
この実施の形態2では、EV走行からHV走行へ切替わるときのエンジン始動ショックが測定され、その測定値を用いて、予め準備されたエンジン始動しきい値が補正(学習)される。これにより、EV走行領域に関する利用者の意図をより正確に車両の走行制御に反映させることが可能となる。
【0048】
図5は、実施の形態2によるハイブリッド車両の全体ブロック図である。図5を参照して、このハイブリッド車両100Aは、図1に示した実施の形態1によるハイブリッド車両100の構成において、加速度センサ(Gセンサ)26をさらに備え、ECU22に代えてECU22Aを備える。
【0049】
加速度センサ26は、このハイブリッド車両100Aのショックレベルを測定する。具体的には、加速度センサ26は、EV走行モードからHV走行モードへ切替わるときのエンジン2の始動時にハイブリッド車両100Aに発生するショックの大きさ(エンジン始動ショック)を測定し、その測定結果をECU22Aへ出力する。この加速度センサ26には、種々のタイプの加速度センサを用いることができる。
【0050】
ECU22Aは、エンジン2の始動時に加速度センサ26からエンジン始動ショックの測定値を取得し、その測定されたエンジン始動ショックに基づいてエンジン始動しきい値を補正する。より詳しくは、EVスイッチ24により変更されたエンジン始動しきい値に対応するエンジン始動ショック(設定値)と、加速度センサ26により測定されるエンジン始動ショック(測定値)との偏差に基づいて、エンジン始動しきい値が補正される。たとえば、エンジン始動ショックの測定値が設定値よりも小さかった場合には、そのときの走行状態近傍におけるエンジン始動しきい値を大きくするようにエンジン始動しきい値が補正される。
【0051】
図6は、図5に示したECU22Aの機能ブロック図である。図6を参照して、ECU22Aは、図2に示した実施の形態1におけるECU22の構成において、補正部60をさらに含み、走行制御部52に代えて走行制御部52Aを含む。
【0052】
補正部60は、加速度センサ26(図5)からエンジン始動ショックの測定値Gを受ける。そして、補正部60は、そのエンジン始動ショックの測定値Gに基づいてエンジン始動しきい値を補正する。
【0053】
図7は、エンジン始動しきい値が補正(学習)される様子の一例を示した図である。なお、この図7は、実施の形態1において説明した図3に対応するものである。図7を参照して、EVスイッチ24(図5)によりエンジン始動しきい値が線k1に設定されているときに、車両速度SV0で走行中にエンジン2が始動したものとする。
【0054】
このときのエンジン始動ショックが加速度センサ26によって測定される。この図7では、エンジン2の始動時に実際に発生したショックが、線k1におけるエンジン始動ショックよりも小さかった場合が示されている。そして、加速度センサ26によって測定されたエンジン始動ショックと線k1との差に基づいて、このときの車両速度SV0におけるエンジン始動しきい値がP0に補正されるとともに、車両速度SV0近傍においてもエンジン始動しきい値が引き上げられる(点線k5)。
【0055】
再び図6を参照して、走行制御部52Aは、補正部60によって補正されたエンジン始動しきい値を車両の要求出力が超えると、EV走行モードからHV走行モードへ切替える。なお、走行制御部52Aのその他の機能は、図2に示した実施の形態1における走行制御部52と同じである。また、ECU22Aのその他の機能も、実施の形態1におけるECU22と同じである。
【0056】
図8は、実施の形態2におけるECU22Aにより実行されるエンジン始動しきい値の変更処理を説明するためのフローチャートである。図8を参照して、このフローチャートは、図4に示したフローチャートにおいてステップS40〜S100をさらに含む。すなわち、ステップS20またはS30の処理が実行されると、ECU22Aは、カウンタKに初期値1を設定する(ステップS40)。
【0057】
その後、車両の要求出力がエンジン始動しきい値を超えることによりEV走行モードからHV走行モードへ移行されると(ステップS50においてYES)、ECU22Aは、加速度センサ26(図5)により測定されたエンジン始動ショックを取得する(ステップS60)。そして、ECU22Aは、その取得したエンジン始動ショック(測定値)を、EVスイッチ24により設定されたエンジン始動しきい値に対応するエンジン始動ショック(設定値)と比較し、それらの差が所定の判定値αよりも小さいか否かを判定する(ステップS70)。
【0058】
エンジン始動ショックについての測定値と設定値との差が判定値α以上であると判定されると(ステップS70においてNO)、ECU22Aは、エンジン始動ショックの測定値から設定値を差引いた値に基づいて、そのときの車両速度に基づいてエンジン始動しきい値を補正する(ステップS80)。たとえば、図7に説明したようにエンジン始動しきい値が補正される。
【0059】
一方、ステップS70において、エンジン始動ショックについての測定値と設定値との差が判定値αよりも小さいと判定されると(ステップS70においてYES)、ECU22Aは、カウンタKを1だけカウントアップする(ステップS90)。そして、ECU22Aは、カウンタKが予め定められた値k0となったか否かを判定し(ステップS100)、カウンタKが値k0に達したときはステップS110へ処理を進め、カウンタKが値k0に達していないときは、ステップS50へ処理を戻す。
【0060】
なお、上記においては、EVスイッチ24によりEV走行領域の変更が要求されているときにエンジン始動しきい値を補正(学習)するものとしたが、EVスイッチ24の操作に拘わらず、エンジン始動しきい値の上記補正(学習)を行なうようにしてもよい。
【0061】
以上のように、この実施の形態2においては、EV走行からHV走行へ切替わるときのエンジン始動ショックが測定され、その測定値に基づいてエンジン始動しきい値が補正(学習)される。したがって、この実施の形態2によれば、EV走行領域に関する利用者の意図をより正確に車両の走行制御に反映させることが可能となる。
【0062】
なお、上記の各実施の形態においては、車両の要求出力に基づいて走行モードを切替えるものとしたが、車両の要求トルクや車両速度に基づいて走行モードを切替えるようにしてもよい。すなわち、車両の要求トルク(あるいは車両速度)についてのエンジン始動しきい値を要求トルク(車両速度)が超えると、EV走行モードからHV走行モードへ切替えるものであってもよい。
【0063】
また、上記においては、EVスイッチ24がオン操作されているときにエンジン始動しきい値を変更可能としたが、EVスイッチ24の操作に拘わらずエンジン始動しきい値を変更可能としてもよい。
【0064】
また、車両の走行状況(たとえば、高速走行主体や市街地走行主体など)に基づいてエンジン始動しきい値を学習するようにしてもよい。たとえば、走行速度から市街地走行主体の走行であると判断される場合には、エンジン始動しきい値を全体的に高めるように学習させてもよい。
【0065】
また、上記においては、EVスイッチ24からエンジン始動しきい値の設定を変更可能としたが、エンジン始動しきい値の設定を変更するための操作入力部をEVスイッチ24とは別に設けてもよい。
【0066】
また、上記においては、動力分割装置4によりエンジン2の動力を伝達ギヤ8とモータジェネレータ6とに分割して伝達可能なシリーズ/パラレル型のハイブリッド車両について説明したが、この発明は、その他の形式のハイブリッド車両にも適用可能である。すなわち、たとえば、モータジェネレータ6を駆動するためにのみエンジン2を用い、モータジェネレータ10でのみ車両の駆動力を発生する、いわゆるシリーズ型のハイブリッド車両や、エンジンを主動力として必要に応じてモータがアシストするとともに、そのモータを発電機としても用いて蓄電装置を充電可能な1モータ型のハイブリッド車両などにもこの発明は適用可能である。
【0067】
なお、上記において、エンジン2は、この発明における「内燃機関」の一実施例に対応し、モータジェネレータ10は、この発明における「電動機」の一実施例に対応する。また、エンジン始動しきい値変更部54は、この発明における「変更部」の一実施例に対応し、EVスイッチ24は、この発明における「設定部」および「操作部」の一実施例に対応する。さらに、モータジェネレータ6は、この発明における「もう1つの電動機」の一実施例に対応し、加速度センサ26は、この発明における「測定器」の一実施例に対応する。
【0068】
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0069】
2 エンジン、4 動力分割装置、6,10 モータジェネレータ、8 伝達ギヤ、12 駆動軸、14 車輪、16 蓄電装置、18,20 電力変換器、22,22A ECU、24 EVスイッチ、26 加速度センサ、52,52A 走行制御部、54 エンジン始動しきい値変更部、56 エンジン制御部、58 モータジェネレータ制御部、60 補正部、100,100A ハイブリッド車両。
【特許請求の範囲】
【請求項1】
ハイブリッド車両の制御装置であって、
前記ハイブリッド車両は、
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機とを含み、
前記制御装置は、
前記ハイブリッド車両の走行状態を示す物理量が前記内燃機関の始動しきい値を超えると、前記内燃機関を停止して前記電動機のみを用いて走行する第1の走行モードから前記内燃機関を動作させて走行する第2の走行モードへ切替える走行制御部と、
前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更する変更部とを備える、ハイブリッド車両の制御装置。
【請求項2】
前記変更部は、前記ハイブリッド車両の走行レンジの変更を伴なうことなく前記始動しきい値を変更する、請求項1に記載のハイブリッド車両の制御装置。
【請求項3】
前記始動しきい値を運転者が設定するための設定部をさらに備える、請求項1または2に記載のハイブリッド車両の制御装置。
【請求項4】
前記ハイブリッド車両は、前記蓄電装置から電力を受けて前記内燃機関を始動するもう1つの電動機をさらに含む、請求項1から3のいずれかに記載のハイブリッド車両の制御装置。
【請求項5】
前記第1の走行モードから前記第2の走行モードへ切替わるときの前記内燃機関の始動時に前記ハイブリッド車両に発生するショックの大きさを測定可能な測定器と、
前記測定器により測定されるショックの測定値に基づいて前記始動しきい値を補正する補正部とをさらに備える、請求項4に記載のハイブリッド車両の制御装置。
【請求項6】
前記第1の走行モードでの走行を運転者が要求するための操作部をさらに備え、
前記変更部は、前記操作部により前記第1の走行モードでの走行が要求されているとき、前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更する、請求項1または2に記載のハイブリッド車両の制御装置。
【請求項7】
前記操作部は、さらに、前記始動しきい値の変更を運転者が入力可能に構成される、請求項6に記載のハイブリッド車両の制御装置。
【請求項8】
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機と、
請求項1から7のいずれかに記載の制御装置とを備えるハイブリッド車両。
【請求項9】
ハイブリッド車両の制御方法であって、
前記ハイブリッド車両は、
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機とを備え、
前記制御方法は、
前記ハイブリッド車両の走行状態を示す物理量が前記内燃機関の始動しきい値を超えると、前記内燃機関を停止して前記電動機のみを用いて走行する第1の走行モードから前記内燃機関を動作させて走行する第2の走行モードへ切替えるステップと、
前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更するステップとを含む、ハイブリッド車両の制御方法。
【請求項1】
ハイブリッド車両の制御装置であって、
前記ハイブリッド車両は、
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機とを含み、
前記制御装置は、
前記ハイブリッド車両の走行状態を示す物理量が前記内燃機関の始動しきい値を超えると、前記内燃機関を停止して前記電動機のみを用いて走行する第1の走行モードから前記内燃機関を動作させて走行する第2の走行モードへ切替える走行制御部と、
前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更する変更部とを備える、ハイブリッド車両の制御装置。
【請求項2】
前記変更部は、前記ハイブリッド車両の走行レンジの変更を伴なうことなく前記始動しきい値を変更する、請求項1に記載のハイブリッド車両の制御装置。
【請求項3】
前記始動しきい値を運転者が設定するための設定部をさらに備える、請求項1または2に記載のハイブリッド車両の制御装置。
【請求項4】
前記ハイブリッド車両は、前記蓄電装置から電力を受けて前記内燃機関を始動するもう1つの電動機をさらに含む、請求項1から3のいずれかに記載のハイブリッド車両の制御装置。
【請求項5】
前記第1の走行モードから前記第2の走行モードへ切替わるときの前記内燃機関の始動時に前記ハイブリッド車両に発生するショックの大きさを測定可能な測定器と、
前記測定器により測定されるショックの測定値に基づいて前記始動しきい値を補正する補正部とをさらに備える、請求項4に記載のハイブリッド車両の制御装置。
【請求項6】
前記第1の走行モードでの走行を運転者が要求するための操作部をさらに備え、
前記変更部は、前記操作部により前記第1の走行モードでの走行が要求されているとき、前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更する、請求項1または2に記載のハイブリッド車両の制御装置。
【請求項7】
前記操作部は、さらに、前記始動しきい値の変更を運転者が入力可能に構成される、請求項6に記載のハイブリッド車両の制御装置。
【請求項8】
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機と、
請求項1から7のいずれかに記載の制御装置とを備えるハイブリッド車両。
【請求項9】
ハイブリッド車両の制御方法であって、
前記ハイブリッド車両は、
車両駆動力を発生する内燃機関と、
蓄電装置と、
前記蓄電装置から電力を受けて車両駆動力を発生する電動機とを備え、
前記制御方法は、
前記ハイブリッド車両の走行状態を示す物理量が前記内燃機関の始動しきい値を超えると、前記内燃機関を停止して前記電動機のみを用いて走行する第1の走行モードから前記内燃機関を動作させて走行する第2の走行モードへ切替えるステップと、
前記ハイブリッド車両の運転者の意図を反映して前記始動しきい値を変更するステップとを含む、ハイブリッド車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−67337(P2013−67337A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208922(P2011−208922)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]