
ハイブリッド車両の制御装置及びハイブリッド車両の制御方法。
【課題】 第2締結要素の耐久性を向上することが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンと、モータと、前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、前記第2締結要素の温度を検知する温度検知手段と、を有し、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることとした。
【解決手段】 エンジンと、モータと、前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、前記第2締結要素の温度を検知する温度検知手段と、を有し、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることとした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、動力源にエンジンとモータを備えたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
ハイブリッド車両として特許文献1の技術が開示されている。この公報には、エンジンとモータとを断接する第1締結要素と、モータと駆動輪とを断接する第2締結要素を備え、走行モードとして、モータのみを動力源として走行するモータ使用走行モードと、エンジンを動力源に含みながら走行するエンジン使用走行モードとを有し、走行状態に応じて走行モードを切り換えることで、燃費の向上を図っている。
【特許文献1】特開平11−82260号公報。
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載の構成にあっては、要求駆動力が高い場合、エンジンとモータ双方の駆動力を用いて発進要求がなされる場合がある。このとき、特許文献1に記載の構成には、トルクコンバータのように回転数を吸収する要素が存在しないため、第1締結要素と第2締結要素を完全締結すると、エンジンの回転数に応じて車速が決まってしまう。エンジンには自立回転を維持するためのアイドル回転数による下限値が存在し、このアイドル回転数は、エンジンの暖機運転等によりアイドルアップを行っていると、更に下限値が高くなる。よって、このような状況でも要求駆動力に応えるべく、第2締結要素をスリップ制御させ、車両発進時や上記下限値を下回るような極低速走行時に、エンジンを用いた走行を可能としている。
【0004】
しかしながら、第2締結要素が過熱している状態で、上記スリップ制御による走行を行うと、更に過熱することで第2締結要素の耐久性の低下を招く虞があった。
【0005】
本発明は、上記問題に着目してなされたもので、第2締結要素の耐久性を向上することが可能なハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明では、エンジンと、モータと、前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、前記第2締結要素の温度を検知する温度検知手段と、を有し、前記制御手段は、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とする。
【発明の効果】
【0007】
よって、本発明のハイブリッド車両の制御装置にあっては、第2締結要素の温度が所定値以上のときは、第2締結要素が完全締結状態となる第1走行モードが選択されるため、第2締結要素が更に過熱されることがなく、また、エンジン回転数の下限値に制限を受けることもないため、第2締結要素の耐久性を向上しつつ走行することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明のハイブリッド車両のエンジン始動制御装置を実現する最良の形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0009】
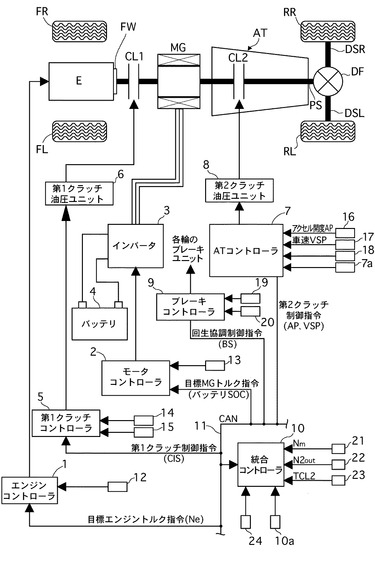
まず、ハイブリッド車両の駆動系構成を説明する。図1は実施例1のエンジン始動制御装置が適用された後輪駆動によるハイブリッド車両を示す全体システム図である。実施例1におけるハイブリッド車の駆動系は、図1に示すように、エンジンEと、フライホイールFWと、第1クラッチCL1と、モータジェネレータMGと、第2クラッチCL2と、自動変速機ATと、プロペラシャフトPSと、ディファレンシャルDFと、左ドライブシャフトDSLと、右ドライブシャフトDSRと、左後輪RL(駆動輪)と、右後輪RR(駆動輪)と、を有する。なお、FLは左前輪、FRは右前輪である。
【0010】
エンジンEは、ガソリンエンジンやディーゼルエンジンであり、後述するエンジンコントローラ1からの制御指令に基づいて、スロットルバルブのバルブ開度等が制御される。なお、エンジン出力軸にはフライホイールFWが設けられている。
【0011】
第1クラッチCL1は、エンジンEとモータジェネレータMGとの間に介装されたクラッチであり、後述する第1クラッチコントローラ5からの制御指令に基づいて、第1クラッチ油圧ユニット6により作り出された制御油圧により、スリップ締結とスリップ開放を含み締結・開放が制御される。
【0012】
モータジェネレータMGは、ロータに永久磁石を埋設しステータにステータコイルが巻き付けられた同期型モータジェネレータであり、後述するモータコントローラ2からの制御指令に基づいて、インバータ3により作り出された三相交流を印加することにより制御される。このモータジェネレータMGは、バッテリ4からの電力の供給を受けて回転駆動する電動機として動作することもできるし(以下、この状態を「力行」と呼ぶ)、ロータが外力により回転している場合には、ステータコイルの両端に起電力を生じさせる発電機として機能してバッテリ4を充電することもできる(以下、この動作状態を「回生」と呼ぶ)。なお、このモータジェネレータMGのロータは、図外のダンパーを介して自動変速機ATの入力軸に連結されている。
【0013】
第2クラッチCL2は、モータジェネレータMGと左右後輪RL,RRとの間に介装されたクラッチであり、後述するATコントローラ7からの制御指令に基づいて、第2クラッチ油圧ユニット8により作り出された制御油圧により、スリップ締結とスリップ開放を含み締結・開放が制御される。
【0014】
自動変速機ATは、前進5速後退1速等の有段階の変速比を車速やアクセル開度等に応じて自動的に切り換える変速機であり、第2クラッチCL2は、専用クラッチとして新たに追加したものではなく、自動変速機ATの各変速段にて締結される複数の摩擦締結要素のうち、いくつかの摩擦締結要素を流用している。尚、詳細については後述する。
【0015】
そして、自動変速機ATの出力軸は、プロペラシャフトPS、ディファレンシャルDF、左ドライブシャフトDSL、右ドライブシャフトDSRを介して左右後輪RL,RRに連結されている。尚、前記第1クラッチCL1と第2クラッチCL2には、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチを用いている。
【0016】
このハイブリッド駆動系には、第1クラッチCL1の締結・開放状態に応じて3つの走行モードを有する。第1走行モードは、第1クラッチCL1の開放状態で、モータジェネレータMGの動力のみを動力源として走行するモータ使用走行モードとしての電気自動車走行モード(以下、「EV走行モード」と略称する。)である。第2走行モードは、第1クラッチCL1の締結状態で、エンジンEを動力源に含みながら走行するエンジン使用走行モード(以下、「HEV走行モード」と略称する。)である。第3走行モードは、第1クラッチCL1の締結状態で第2クラッチCL2をスリップ制御させ、エンジンEを動力源に含みながら走行するエンジン使用スリップ走行モード(以下、「WSC(Wet Start Clutch)走行モード」と略称する。)である。
【0017】
上記「HEV走行モード」には、「エンジン走行モード」と「モータアシスト走行モード」と「走行発電モード」との3つの走行モードを有する。
【0018】
「エンジン走行モード」は、エンジンEのみを動力源として駆動輪を動かす。「モータアシスト走行モード」は、エンジンEとモータジェネレータMGの2つを動力源として駆動輪を動かす。「走行発電モード」は、エンジンEを動力源として駆動輪RR,RLを動かすと同時に、モータジェネレータMGを発電機として機能させる。
【0019】
定速運転時や加速運転時には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる。また、減速運転時は、制動エネルギーを回生してモータジェネレータMGにより発電し、バッテリ4の充電のために使用する。
【0020】
また、更なるモードとして、車両停止時には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる発電モードを有する。
【0021】
次に、ハイブリッド車両の制御系を説明する。実施例1におけるハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、インバータ3と、バッテリ4と、第1クラッチコントローラ5と、第1クラッチ油圧ユニット6と、ATコントローラ7と、第2クラッチ油圧ユニット8と、ブレーキコントローラ9と、統合コントローラ10と、を有して構成されている。なお、エンジンコントローラ1と、モータコントローラ2と、第1クラッチコントローラ5と、ATコントローラ7と、ブレーキコントローラ9と、統合コントローラ10とは、互いに情報交換が可能なCAN通信線11を介して接続されている。
【0022】
エンジンコントローラ1は、エンジン回転数センサ12からのエンジン回転数情報を入力し、統合コントローラ10からの目標エンジントルク指令等に応じ、エンジン動作点(Ne,Te)を制御する指令を、例えば、図外のスロットルバルブアクチュエータへ出力する。なお、エンジン回転数Neの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0023】
モータコントローラ2は、モータジェネレータMGのロータ回転位置を検出するレゾルバ13からの情報を入力し、統合コントローラ10からの目標モータジェネレータトルク指令等に応じ、モータジェネレータMGのモータ動作点(Nm,Tm)を制御する指令をインバータ3へ出力する。なお、このモータコントローラ2では、バッテリ4の充電状態を表すバッテリSOCを監視していて、バッテリSOC情報は、モータジェネレータMGの制御情報に用いると共に、CAN通信線11を介して統合コントローラ10へ供給する。
【0024】
第1クラッチコントローラ5は、第1クラッチ油圧センサ14と第1クラッチストロークセンサ15からのセンサ情報を入力し、統合コントローラ10からの第1クラッチ制御指令に応じ、第1クラッチCL1の締結・開放を制御する指令を第1クラッチ油圧ユニット6に出力する。なお、第1クラッチストロークC1Sの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0025】
ATコントローラ7は、アクセル開度センサ16と車速センサ17と第2クラッチ油圧センサ18と運転者の操作するシフトレバーの位置に応じた信号を出力するインヒビタスイッチ7aからのセンサ情報を入力し、統合コントローラ10からの第2クラッチ制御指令に応じ、第2クラッチCL2の締結・開放を制御する指令をAT油圧コントロールバルブ内の第2クラッチ油圧ユニット8に出力する。なお、アクセルペダル開度APOと車速VSPとインヒビタスイッチ7aの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0026】
ブレーキコントローラ9は、4輪の各車輪速を検出する車輪速センサ19とブレーキストロークセンサ20からのセンサ情報を入力し、例えば、ブレーキ踏み込み制動時、ブレーキストロークBSから求められる要求制動力に対し回生制動力だけでは不足する場合、その不足分を機械制動力(液圧制動力やモータ制動力)で補うように、統合コントローラ10からの回生協調制御指令に基づいて回生協調ブレーキ制御を行う。
【0027】
統合コントローラ10は、車両全体の消費エネルギを管理し、最高効率で車両を走らせるための機能を担うもので、モータ回転数Nmを検出するモータ回転数センサ21と、第2クラッチ出力回転数N2outを検出する第2クラッチ出力回転数センサ22と、第2クラッチトルクTCL2を検出する第2クラッチトルクセンサ23と、ブレーキ油圧センサ24と、第2クラッチCL2の温度を検知する温度センサ10aと、からの情報およびCAN通信線11を介して得られた情報を入力する。
【0028】
実施例1の構成では、後述するように第2クラッチCL2が自動変速機ATの変速段によって2種類存在する(フォワードブレーキB4とハイ&ローリバースクラッチC2)ため、それぞれの油温を検知可能なように複数設けられている。尚、温度センサ10aは、例えば第2クラッチCL2のスリップ量と第2クラッチCL2の締結容量から発熱量を推定演算する構成としてもよく、特に限定しない。
【0029】
また、統合コントローラ10は、エンジンコントローラ1への制御指令によるエンジンEの動作制御と、モータコントローラ2への制御指令によるモータジェネレータMGの動作制御と、第1クラッチコントローラ5への制御指令による第1クラッチCL1の締結・開放制御と、ATコントローラ7への制御指令による第2クラッチCL2の締結・開放制御と、を行う。
【0030】
更に、統合コントローラ10は、温度センサ10aの検知した第2クラッチCL2の温度が異常を表す所定値以上かどうかを監視し、所定値以上のときは、更に第2クラッチCL2が過熱されることを防止すべく、過熱時対応制御が実行される。この過熱時対応制御については後述する。
【0031】
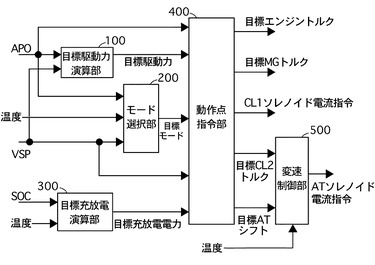
以下に、図2に示すブロック図を用いて、実施例1の統合コントローラ10にて演算される制御を説明する。例えば、この演算は、制御周期10msec毎に統合コントローラ10で演算される。統合コントローラ10は、目標駆動力演算部100と、モード選択部200と、目標充放電演算部300と、動作点指令部400と、変速制御部500と、を有する。
【0032】
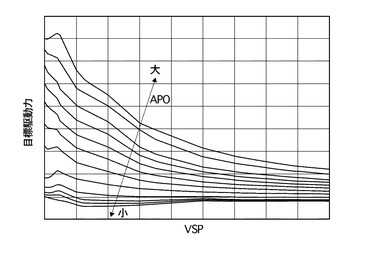
目標駆動力演算部100では、図3に示す目標駆動力マップを用いて、アクセルペダル開度APOと車速VSPとから、目標駆動力tFoOを演算する。
【0033】
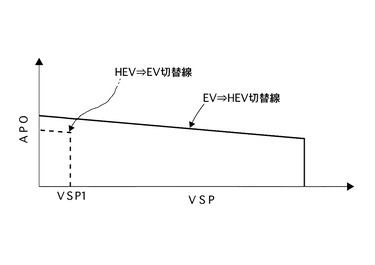
モード選択部200では、図4に示すEV-HEV選択マップを用いて、アクセルペダル開度APOと車速VSPとから、目標モードを演算する。但し、バッテリSOCが所定値以下であれば、強制的に「HEV走行モード」を目標モードとする。また、EV-HEV選択マップには、低車速領域においてアクセルペダル開度APOが大きいときに、大きな駆動力を出力するために、WSCモードが設定されている。HEV→WSC切換線もしくはEV→WSC切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低い領域に設定されている。図4中斜線領域がHEV走行モードからWSC走行モードに切り換えられる領域であり、図4中網掛け領域がWSC走行モードからEV走行モードに切り換えられる領域となる。
【0034】
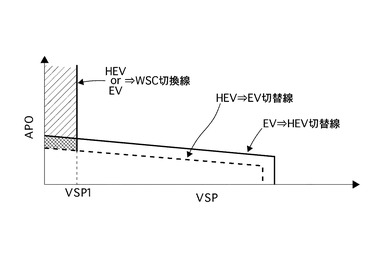
このモード選択部200には、更に、図10に示すように、過熱時対応EV-HEV選択マップを有する。この過熱時対応EV-HEV選択マップは、通常制御時におけるEV-HEV選択マップに比べて、EV→HEV切換線に囲まれた領域、すなわちHEV走行モードに切り換えられる前のEV走行モード領域が広く設定されている。また、HEV走行モードからEV走行モードへ切り換えるHEV→EV切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったときにのみモード切り換えを許可するように設定されている。言い換えると、EV走行モードの時は極力EV走行モードを維持するように制御され、一旦HEV走行モードに切り換えられたときは、極力HEV走行モードを維持するように制御される。
【0035】
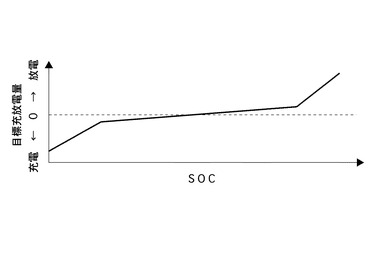
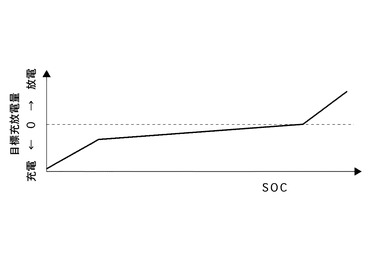
目標充放電演算部300では、図5に示す目標充放電量マップを用いて、バッテリSOCから目標充放電電力tPを演算する。この目標充放電演算部300には、更に、図11に示すように、過熱時対応目標充放電量マップを有する。この過熱時対応目標充放電量マップは、通常制御時における目標充放電量マップに比べて高いSOCにおいても積極的に充電要求を出力するように設定されている。
【0036】
動作点指令部400では、アクセルペダル開度APOと、目標駆動力tFoOと、目標モードと、車速VSPと、目標充放電電力tPとから、これらの動作点到達目標として、過渡的な目標エンジントルクと目標モータジェネレータトルクと目標第2クラッチ締結容量と目標自動変速シフトと第1クラッチソレノイド電流指令を演算する。また、動作点指令部400には、EV走行モードからHEV走行モードに遷移するときにエンジンEを始動するエンジン始動制御部が設けられている。
【0037】
ここで、エンジン始動制御について説明する。エンジン始動要求が成されると、第2クラッチCL2の締結容量を、エンジン始動前の出力軸トルクとなる締結容量に設定すると共に、モータジェネレータMGの駆動力を増大させる。すると、モータジェネレータMGに作用する負荷は、第2クラッチCL2の締結容量分のみであるため、過剰な駆動力によってモータジェネレータMGの回転数は上昇する。尚、TM出力トルクは第2クラッチCL2の締結容量によって決定されるため、TM出力トルクの変動はない。
【0038】
このとき、エンジン始動要求が成され、モータジェネレータMGの駆動力が十分に上昇したと見込まれるタイミング(例えばモータジェネレータMGの回転数がTM回転数よりも所定回転数以上高くなった段階等)において、第1クラッチCL1の締結容量を所定値まで上昇させるものであり、極力エンジンが素早く始動できるように上昇させる。
【0039】
第1クラッチCL1の締結容量が所定値まで上昇すると、モータジェネレータMGに作用する負荷が増大し、モータジェネレータMGのトルクもこの第1クラッチCL1の締結容量の上昇に伴って増大する。このとき、第1クラッチCL1の締結容量をエンジンの始動に必要なトルク程度の締結容量まで上昇させているため、エンジンEのクランキングが行われ、エンジンEが自立回転を始めることで、エンジン始動が完了する。すなわち、エンジン始動制御中は、第2クラッチCL2を継続的にスリップ状態とさせ、TM出力トルクの変動を極力抑制した状態で行われる。
【0040】
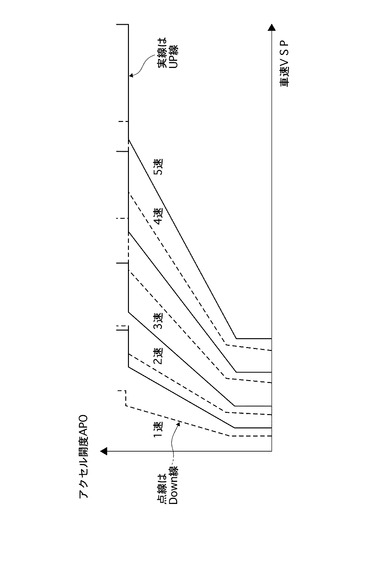
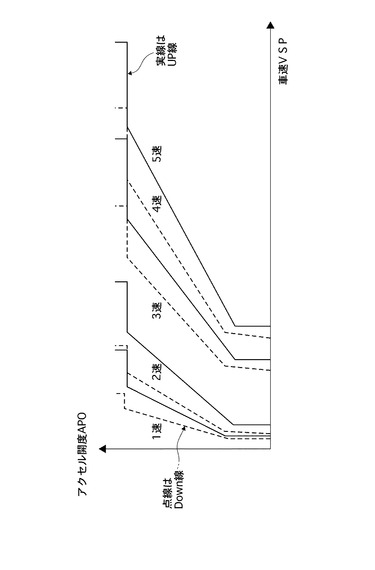
変速制御部500では、図6のシフトマップに示すシフトスケジュールに沿って、目標第2クラッチ締結容量と目標変速段を達成するように自動変速機AT内のソレノイドバルブを駆動制御する。尚、図6に示すシフトマップは、車速VSPとアクセルペダル開度APOに基づいて予め目標変速段が設定されたものであり、図6中実線がアップシフト線、点線がダウンシフト線を示す。また、図6中、2−3アップシフト線よりも1速側の領域が特許請求の範囲に記載の第1領域に相当し、2−3アップシフト線よりも5速側の領域が特許請求の範囲に記載の第2領域に相当する。
【0041】
この変速制御部500には、更に、図12に示すように、過熱時対応シフトマップを有する。この過熱時対応シフトマップは、通常制御時におけるシフトマップに比べ、2−3アップシフト線よりも1速側の領域が狭く変更され、2−3アップシフト線よりも5速側の領域が広く設定されている。言い換えると、通常制御時に比べて、3速より高い変速段での走行が増加するように設定されている。
【0042】
[自動変速機の構成について]
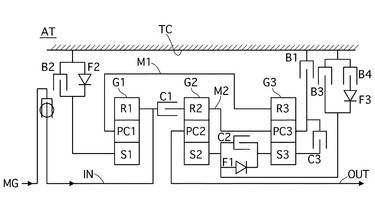
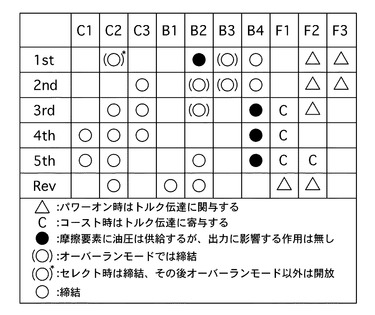
図7はハイブリッド車両の駆動系に採用された自動変速機ATのパワートレーンを示すスケルトン図、図8はハイブリッド車両の駆動系に採用された自動変速機ATによるクラッチ・ブレーキの締結作動表を示す図である。
【0043】
自動変速機ATは、図7に示すように、回転要素としてフロントサンギアS1とフロントキャリアPC1とフロントリングギアR1とを有するフロントプラネタリーギアG1と、回転要素としてミッドサンギアS2とミッドキャリアPC2とミッドリングギアR2とを有するミッドプラネタリーギアG2と、回転要素としてリアサンギアS3とリアキャリアPC3とリアリングギアR3とを有するリアプラネタリーギアG3と、による3組の単純遊星歯車を備えている。
【0044】
なお、図7中のINはモータジェネレータMGのみ、または、エンジンE及びモータジェネレータMGからダンパーを介して回転駆動トルクが入力されるインプットシャフトであり、OUTは自動変速機ATを経過して左右後輪RL,RRに回転駆動トルクを出力するアウトプットシャフトである。
【0045】
そして、前進5速後退1速の変速段を決める締結要素として、インプットクラッチC1と、ハイ&ローリバースクラッチC2と、ダイレクトクラッチC3と、リバースブレーキB1と、フロントブレーキB2と、ローコーストブレーキB3と、フォワードブレーキB4と、ファーストワンウェイクラッチF1と、サードワンウェイクラッチF2と、フォワードワンウェイクラッチF3と、を備えている。
【0046】
インプットクラッチC1は、開放時にフロントリングギアR1をインプットシャフトINに接続し、締結時にフロントリングギアR1とミッドリングギアR2とをインプットシャフトINに接続する。ハイ&ローリバースクラッチC2は、締結によりミッドサンギアS2とリアサンギアS3とを接続する。ダイレクトクラッチC3は、締結によりリアサンギアS3とリアキャリアPC3を接続する。
【0047】
リバースブレーキB1は、締結によりリアキャリアPC3をトランスミッションケースTCに固定する。フロントブレーキB2は、締結によりフロントサンギアS1をトランスミッションケースTCに固定する。ローコーストブレーキB3は、締結によりミッドサンギアS2をトランスミッションケースTCに固定する。フォワードブレーキB4は、締結によりミッドサンギアS2をトランスミッションケースTCに固定する。
【0048】
ファーストワンウェイクラッチF1は、ミッドサンギアS2に対してリアサンギアS3の正転方向(=エンジンと同一回転方向)の回転をフリー、逆転を固定する。サードワンウェイクラッチF2は、フロントサンギアS1の正転方向をフリー、逆転を固定する。フォワードワンウェイクラッチF3は、ミッドサンギアS2の正転方向をフリー、逆転を固定する。
【0049】
なお、アウトプットシャフトOUTは、ミッドキャリアPC2に直結されている。フロントキャリアPC1とリアリングギアR3とは第1メンバM1により直結されている。ミッドリングギアR2とリアキャリアPC3とは第2メンバM2により直結されている。
【0050】
自動変速機ATは、図8の締結作動表に示すように、ハイ&ローリバースクラッチC2とフロントブレーキB2とローコーストブレーキB3とフォワードブレーキB4を締結することで第1速を達成する。また、ダイレクトクラッチC3とフロントブレーキB2とローコーストブレーキB3とフォワードブレーキB4を締結することで第2速を達成する。また、ハイ&ローリバースクラッチC2とダイレクトクラッチC3とフロントブレーキB2とフォワードブレーキB4を締結することで第3速を達成する。
【0051】
また、インプットクラッチC1とハイ&ローリバースクラッチC2とダイレクトクラッチC3とフォワードブレーキB4を締結することで第4速を達成する。また、インプットクラッチC1とハイ&ローリバースクラッチC2とフロントブレーキB2とフォワードブレーキB4を締結することで第5速を達成する。また、ハイ&ローリバースクラッチC2とリバースブレーキB1とフロントブレーキB2を締結することで後退速を達成する。
【0052】
実施例1にあっては、第2クラッチCL2として、1速及び2速のとき(特許請求の範囲に記載の第1の変速段に相当)はフォワードブレーキB4(特許請求の範囲に記載の第2締結要素に相当)が選択され、3速〜5速のとき(特許請求の範囲に記載の第2の変速段に相当)はハイ&ローリバースクラッチC2(特許請求の範囲に記載の第3締結要素に相当)が選択される。
【0053】
〔過熱時対応制御〕
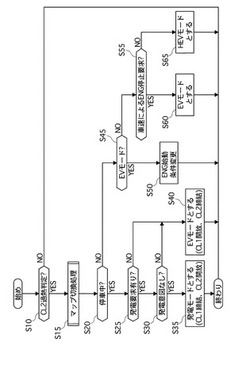
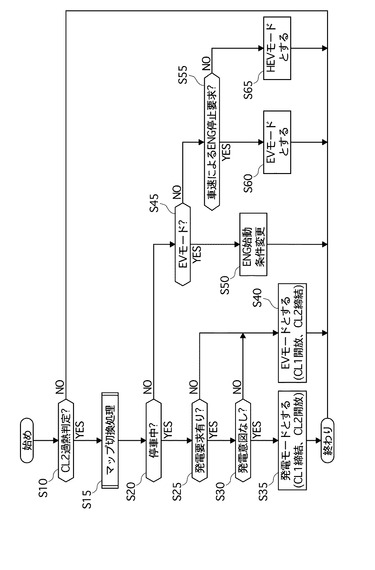
次に、第2クラッチCL2の過熱時対応制御処理について説明する。図9は過熱時対応制御処理を表すフローチャートである。
【0054】
ステップS10では、第2クラッチCL2が過熱したかどうかを判定し、過熱していると判定したときはステップS15へ進み、それ以外のときは本制御フローを終了する。尚、第2クラッチCL2の具体的な判定は、温度センサ10aにより検知された温度が、所定値以上かどうかにより判定する。この所定値は、これ以上温度が過熱した状態が継続、もしくはこれ以上の熱入力があった場合、例えば、クラッチプレートが焼き付いて締結故障を起こす虞がある温度に設定されている。
【0055】
ステップS15では、目標充放電量マップ(図5参照)を過熱時対応目標充放電量マップ(図11参照)に切り換えると共に、シフトマップ(図6参照)を過熱時対応シフトマップ(図10参照)に切り換える。
【0056】
ステップS20では、車両が停車中かどうかを判定し、停車中と判定したときはステップS25へ進み、それ以外のときはステップS45へ進む。尚、車両の停車判定は、例えば車輪速センサ19からのセンサ信号が0,車速センサ17からのセンサ信号が0,もしくはインヒビタスイッチ7aからの信号がパーキングレンジ位置等を示す場合に停車と判定すればよく、特に限定しない。
【0057】
(車両停車時制御)
ステップS25では、過熱時対応充放電量マップに基づいて発電要求があるかどうかを判定し、発電要求があるときはステップS30へ進み、それ以外のときはステップS40へ進む。
【0058】
ステップS30では、発進意図があるか否かを判定し、発進意図があるときはステップS35へ進み、それ以外のときはステップS40へ進む。尚、発進意図とは、運転者が車両停止状態から所定の操作を行って発進しようとしているか否かを表す信号を検知すればよい。具体的には、インヒビタスイッチ7aの信号がパーキングレンジ位置からドライブレンジ等の走行レンジに切り換えられたか否か、もしくはブレーキストロークセンサ20からの信号が、ブレーキペダルを離そうとしているか否かから適宜判定することができる。尚、アクセル開度センサ16の信号は、上記センサの信号が出力された後に出力されるため、発進意図の判定としては遅れることとなる。
【0059】
ステップS35では、発電モードに切り換える。具体的には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる。
【0060】
ステップS40では、EV走行モードに切り換える。
【0061】
(車両走行時制御)
ステップS45では、現在の走行モードがEV走行モードか否かを判定し、EV走行モードのときはステップS50に進み、それ以外のときはステップS55に進む。
【0062】
ステップS50では、エンジンEの始動条件を変更する。具体的には、モード選択部200ににおいて、EV-HEV選択マップ(図4参照)から過熱時対応EV-HEV選択マップ(図10参照)に切り換えられる。
【0063】
ステップS55では、車速VSPによるエンジン停止要求がなされているかどうかを判定し、エンジン停止要求がなされていると判定したときはステップS60へ進んでEV走行モードに切り換え、エンジン停止要求がなされていないと判定したときはステップS65へ進んでHEV走行モードに切り換える。尚、この車速VSPによる判定とは、上述したように、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったか否かを判定しているものであり、過熱時対応EV-HEV選択マップに設定されたものである。
【0064】
〔過熱時対応制御による作用〕
次に、上記過熱時対応制御による作用について場合に分けて説明する。尚、第2クラッチCL2としてフォワードブレーキB4が過熱した状態であって、目標充放電量マップとシフトマップがそれぞれ過熱時対応目標充放電量マップと過熱時対応シフトマップに切り換えられている点を前提とする。これにより、通常制御時よりも積極的にバッテリ4に充電するように設定されると共に、通常制御時よりも過熱したフォワードブレーキB4を使用しない変速段を積極的に使用するように設定される。
【0065】
(車両停止中の場合)
車両が停止しているときは、発電モードに設定される。これにより、バッテリ4のSOCを高くすることができる。バッテリSOCが高いと、発進した後にEV走行モードにて走行可能な状態を長く維持することができるため、フォワードブレーキB4をスリップ制御しなければならない状態を極力回避することができる。
【0066】
(車両停止中から発進する場合)
車両停止中では発電モードが選択されているため、第1クラッチCL1が締結し、第2クラッチCL2(フォワードブレーキB4)は解放された状態である。この状態から発進する場合、第2クラッチCL2の過熱時には、第2クラッチCL2のスリップ制御を回避するために、WSC走行モードではなく、EV走行モードにより発進を行う。尚、通常制御時にあっては、図4のEV-HEV選択モードマップに示すようにWSC走行モードが選択される可能性があるが、過熱時対応制御中には、図10のEV-HEV選択モードマップに示すようにWSC走行モードが選択される余地はない。
【0067】
このとき、一旦第1クラッチCL1を解放し、その後、第2クラッチCL2を完全締結してから発進しなければならず、発進タイムラグが発生する虞がある。そこで、発進意図を検知し、この発進意図をトリガとして素早くEV走行モードに切り換える。これにより、運転者がアクセルペダルを踏み込んだと同時に駆動力を出力することが可能となり、応答性を確保することができる。
【0068】
(EV走行モードによる走行中の場合)
EV走行モードにより走行しているときは、エンジン始動条件を変更する。これにより、図10に示す過熱時対応EV-HEV選択マップが選択され、通常制御時におけるEV-HEV選択マップに比べて、EV→HEV切換線に囲まれた領域、すなわちHEV走行モードに切り換えられる前のEV走行モード領域が広く設定される。
【0069】
すなわち、EV走行モードからHEV走行モードに状態遷移する際には、エンジンEを始動しなければならない。エンジン始動時は、エンジン始動制御において上述したように、継続的に第2クラッチCL2をスリップ制御させる必要がある。よって、EV走行モードを極力維持することで、エンジン始動回数を減らすことが可能となり、第2クラッチCL2の更なる過熱を抑制することができる。
【0070】
また、HEV走行モードからEV走行モードへ切り換えるHEV→EV切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったときにのみモード切り換えを許可するように設定されている。よって、一旦EV走行モードからHEV走行モードに遷移した後は、可能な限りHEV走行モードを維持することで、再度EV走行モードからHEV走行モードに遷移することがない。言い換えると、エンジン始動制御を再度実行する必要が無く、第2クラッチCL2の更なる過熱を抑制することができる。
【0071】
(走行中の自動変速機の変速制御)
EV走行モード、もしくはHEV走行モードにより走行している際、通常のシフトマップとは異なる過熱時対応シフトマップにより変速制御が成される。よって、第2クラッチCL2であるフォワードブレーキB4が過熱している状態のときは、フォワードブレーキB4を解放し、過熱していないハイ&ローリバースクラッチC2を締結する変速段である3速,4速,5速を使用して走行することとなる。よって、過熱していないハイ&ローリバースクラッチC2によってエンジン始動制御等を行うシーンを増やすことで、第2クラッチCL2の耐久性の悪化を回避することができる。
【0072】
以上、各走行シーンに場合分けして説明したが、共通していることとして、第2クラッチCL2が過熱したときは、WSC走行モードを選択しないという点である。第2クラッチCL2のスリップ制御を伴う走行状態は極力回避しなければならないため、選択の余地としては、EV走行モードとHEV走行モードに限られる。
【0073】
また、EV走行モードとHEV走行モードの状態遷移においてエンジン始動制御に伴うスリップ制御が必要になるため、走行モードの状態遷移回数を減らす必要がある。
【0074】
これらを踏まえ、上記過熱時対応制御を実行することで、下記に列挙する作用効果を得ることができる。
【0075】
(1)車両停止状態からの発進時であって、第2クラッチCL2の温度が所定値以上のときは、EV走行モードに切り換えることとした。よって、WSC走行モードを選択しないため、第2クラッチCL2がスリップ制御されることがなく、第2クラッチCL2を完全締結状態として走行することが可能となり、更なる過熱を回避することができる。
【0076】
(2)第2クラッチCL2の温度が所定値以上のときは、バッテリ4の充電量が多くなるように制御することとした。具体的には、過熱時対応目標充放電マップを設定し、通常時よりも高いSOCであったとしても充電要求を行うこととした。これにより、EV走行モードを維持可能なシーンを増やすことが可能となり、EV走行モードからHEV走行モードに遷移する際に必要なエンジン始動制御に伴う第2クラッチCL2のスリップ制御回数を減らすことができる。
【0077】
(3)車両停止状態のときであって、第2クラッチCL2の温度が所定値以上のときは、発電モードに切り換えることとした。よって、効率よくバッテリSOCを高くすることができる。
【0078】
(4)運転者の発進意図が検知されたときは、発電モードからEV走行モードに切り換えることこととした。よって、発進時の応答性を確保することができる。
【0079】
(5)第2クラッチCL2の温度が所定値以上のときは、走行中にHEV走行モードに切り換えられた後は、WSC走行モードへの切り換えを禁止することとした。よって、第2クラッチCL2のスリップ制御を行う必要が無く、更なる過熱を回避することができる。
【0080】
(6)フォワードブレーキB4の温度が所定値未満のときは、通常シフトマップに基づいて自動変速機ATの変速段を選択し、第2クラッチCL2の温度が所定値以上のときは、1速及び2速の領域(第1領域)を狭く変更した過熱時対応シフトマップに基づいて自動変速機ATの変速段を選択することとした。
【0081】
よって、EV走行モードからHEV走行モードに遷移する際、3速,4速又は5速において遷移させるシーンが増え、エンジン始動制御に伴うスリップ制御を行ったとしても、フォワードブレーキB4の更なる過熱を回避することができる。
【0082】
尚、ハイ&ローリバースクラッチC2が過熱したときは、極力フォワードブレーキB4を使用する領域を増やせばよいのは言うまでもない。また、フォワードブレーキB4の温度が所定値以上のときは、3速,4速,5速のいずれかでのみEV走行モードからHEV走行モードへの遷移を許可するようにしてもよい。これにより、確実にフォワードブレーキB4の過熱を抑制することができる。
【0083】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。実施例1では、第2クラッチとして自動変速機に内蔵されたクラッチを利用する例を示したが、モータジェネレータと変速機との間に第2クラッチを追加して介装したり、または、変速機と駆動輪との間に第2クラッチを追加して介装(例えば、特開2002−144921号公報参照)しても良い。さらには、第1クラッチ(エンジンクラッチ)のみを持つハイブリッド車両にも適用できるし、第1クラッチ及び第2クラッチを持たずハイブリッド走行モードと電気自動車走行モードを達成するハイブリッド車両にも適用できる。モータは、効率等の影響はあるにせよ、回転数とトルクを独立に制御できるからである。
【0084】
要するに、動力源にエンジンとモータを備え、走行モードとして、モータのみを動力源として走行するモータ使用走行モードと、エンジンを動力源に含みながら走行するエンジン使用走行モードと、を有するハイブリッド車両であれば適用できる。
【図面の簡単な説明】
【0085】
【図1】実施例1の発進時エンジン始動制御装置が適用された後輪駆動のハイブリッド車両を示す全体システム図である。
【図2】実施例1の統合コントローラにおける演算処理プログラムを示す制御ブロック図である。
【図3】図2の目標駆動力演算部にて目標駆動力演算に用いられる目標駆動力マップの一例を示す図である。
【図4】図2のモード選択部にて目標モードの選択に用いられるEV-HEV選択マップを示す図である。
【図5】図2の目標充放電演算部にて目標充放電電力の演算に用いられる目標充放電量マップの一例を示す図である。
【図6】実施例1の自動変速機の通常時シフトマップである。
【図7】実施例1の自動変速機のスケルトン図である。
【図8】実施例1の自動変速機の締結作動表である。
【図9】実施例1の過熱時対応制御を表すフローチャートである。
【図10】実施例1の過熱時対応EV-HEV選択マップである。
【図11】実施例1の過熱時対応も起票充放電量マップである。
【図12】実施例1の自動変速機の過熱時対応シフトマップである。
【符号の説明】
【0086】
E エンジン
FW フライホイール
CL1 第1クラッチ
MG モータジェネレータ
CL2 第2クラッチ
AT 自動変速機
PS プロペラシャフト
DF ディファレンシャル
DSL 左ドライブシャフト
DSR 右ドライブシャフト
RL 左後輪(駆動輪)
RR 右後輪(駆動輪)
FL 左前輪
FR 右前輪
1 エンジンコントローラ
2 モータコントローラ
3 インバータ
4 バッテリ
5 第1クラッチコントローラ
6 第1クラッチ油圧ユニット
7 ATコントローラ
8 第2クラッチ油圧ユニット
9 ブレーキコントローラ
10 統合コントローラ
24 ブレーキ油圧センサ
100 目標駆動力演算部
200 モード選択部
300 目標充放電演算部
400 動作点指令部
500 変速制御部
【技術分野】
【0001】
本発明は、動力源にエンジンとモータを備えたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
ハイブリッド車両として特許文献1の技術が開示されている。この公報には、エンジンとモータとを断接する第1締結要素と、モータと駆動輪とを断接する第2締結要素を備え、走行モードとして、モータのみを動力源として走行するモータ使用走行モードと、エンジンを動力源に含みながら走行するエンジン使用走行モードとを有し、走行状態に応じて走行モードを切り換えることで、燃費の向上を図っている。
【特許文献1】特開平11−82260号公報。
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載の構成にあっては、要求駆動力が高い場合、エンジンとモータ双方の駆動力を用いて発進要求がなされる場合がある。このとき、特許文献1に記載の構成には、トルクコンバータのように回転数を吸収する要素が存在しないため、第1締結要素と第2締結要素を完全締結すると、エンジンの回転数に応じて車速が決まってしまう。エンジンには自立回転を維持するためのアイドル回転数による下限値が存在し、このアイドル回転数は、エンジンの暖機運転等によりアイドルアップを行っていると、更に下限値が高くなる。よって、このような状況でも要求駆動力に応えるべく、第2締結要素をスリップ制御させ、車両発進時や上記下限値を下回るような極低速走行時に、エンジンを用いた走行を可能としている。
【0004】
しかしながら、第2締結要素が過熱している状態で、上記スリップ制御による走行を行うと、更に過熱することで第2締結要素の耐久性の低下を招く虞があった。
【0005】
本発明は、上記問題に着目してなされたもので、第2締結要素の耐久性を向上することが可能なハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明では、エンジンと、モータと、前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、前記第2締結要素の温度を検知する温度検知手段と、を有し、前記制御手段は、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とする。
【発明の効果】
【0007】
よって、本発明のハイブリッド車両の制御装置にあっては、第2締結要素の温度が所定値以上のときは、第2締結要素が完全締結状態となる第1走行モードが選択されるため、第2締結要素が更に過熱されることがなく、また、エンジン回転数の下限値に制限を受けることもないため、第2締結要素の耐久性を向上しつつ走行することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明のハイブリッド車両のエンジン始動制御装置を実現する最良の形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0009】
まず、ハイブリッド車両の駆動系構成を説明する。図1は実施例1のエンジン始動制御装置が適用された後輪駆動によるハイブリッド車両を示す全体システム図である。実施例1におけるハイブリッド車の駆動系は、図1に示すように、エンジンEと、フライホイールFWと、第1クラッチCL1と、モータジェネレータMGと、第2クラッチCL2と、自動変速機ATと、プロペラシャフトPSと、ディファレンシャルDFと、左ドライブシャフトDSLと、右ドライブシャフトDSRと、左後輪RL(駆動輪)と、右後輪RR(駆動輪)と、を有する。なお、FLは左前輪、FRは右前輪である。
【0010】
エンジンEは、ガソリンエンジンやディーゼルエンジンであり、後述するエンジンコントローラ1からの制御指令に基づいて、スロットルバルブのバルブ開度等が制御される。なお、エンジン出力軸にはフライホイールFWが設けられている。
【0011】
第1クラッチCL1は、エンジンEとモータジェネレータMGとの間に介装されたクラッチであり、後述する第1クラッチコントローラ5からの制御指令に基づいて、第1クラッチ油圧ユニット6により作り出された制御油圧により、スリップ締結とスリップ開放を含み締結・開放が制御される。
【0012】
モータジェネレータMGは、ロータに永久磁石を埋設しステータにステータコイルが巻き付けられた同期型モータジェネレータであり、後述するモータコントローラ2からの制御指令に基づいて、インバータ3により作り出された三相交流を印加することにより制御される。このモータジェネレータMGは、バッテリ4からの電力の供給を受けて回転駆動する電動機として動作することもできるし(以下、この状態を「力行」と呼ぶ)、ロータが外力により回転している場合には、ステータコイルの両端に起電力を生じさせる発電機として機能してバッテリ4を充電することもできる(以下、この動作状態を「回生」と呼ぶ)。なお、このモータジェネレータMGのロータは、図外のダンパーを介して自動変速機ATの入力軸に連結されている。
【0013】
第2クラッチCL2は、モータジェネレータMGと左右後輪RL,RRとの間に介装されたクラッチであり、後述するATコントローラ7からの制御指令に基づいて、第2クラッチ油圧ユニット8により作り出された制御油圧により、スリップ締結とスリップ開放を含み締結・開放が制御される。
【0014】
自動変速機ATは、前進5速後退1速等の有段階の変速比を車速やアクセル開度等に応じて自動的に切り換える変速機であり、第2クラッチCL2は、専用クラッチとして新たに追加したものではなく、自動変速機ATの各変速段にて締結される複数の摩擦締結要素のうち、いくつかの摩擦締結要素を流用している。尚、詳細については後述する。
【0015】
そして、自動変速機ATの出力軸は、プロペラシャフトPS、ディファレンシャルDF、左ドライブシャフトDSL、右ドライブシャフトDSRを介して左右後輪RL,RRに連結されている。尚、前記第1クラッチCL1と第2クラッチCL2には、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチを用いている。
【0016】
このハイブリッド駆動系には、第1クラッチCL1の締結・開放状態に応じて3つの走行モードを有する。第1走行モードは、第1クラッチCL1の開放状態で、モータジェネレータMGの動力のみを動力源として走行するモータ使用走行モードとしての電気自動車走行モード(以下、「EV走行モード」と略称する。)である。第2走行モードは、第1クラッチCL1の締結状態で、エンジンEを動力源に含みながら走行するエンジン使用走行モード(以下、「HEV走行モード」と略称する。)である。第3走行モードは、第1クラッチCL1の締結状態で第2クラッチCL2をスリップ制御させ、エンジンEを動力源に含みながら走行するエンジン使用スリップ走行モード(以下、「WSC(Wet Start Clutch)走行モード」と略称する。)である。
【0017】
上記「HEV走行モード」には、「エンジン走行モード」と「モータアシスト走行モード」と「走行発電モード」との3つの走行モードを有する。
【0018】
「エンジン走行モード」は、エンジンEのみを動力源として駆動輪を動かす。「モータアシスト走行モード」は、エンジンEとモータジェネレータMGの2つを動力源として駆動輪を動かす。「走行発電モード」は、エンジンEを動力源として駆動輪RR,RLを動かすと同時に、モータジェネレータMGを発電機として機能させる。
【0019】
定速運転時や加速運転時には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる。また、減速運転時は、制動エネルギーを回生してモータジェネレータMGにより発電し、バッテリ4の充電のために使用する。
【0020】
また、更なるモードとして、車両停止時には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる発電モードを有する。
【0021】
次に、ハイブリッド車両の制御系を説明する。実施例1におけるハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、インバータ3と、バッテリ4と、第1クラッチコントローラ5と、第1クラッチ油圧ユニット6と、ATコントローラ7と、第2クラッチ油圧ユニット8と、ブレーキコントローラ9と、統合コントローラ10と、を有して構成されている。なお、エンジンコントローラ1と、モータコントローラ2と、第1クラッチコントローラ5と、ATコントローラ7と、ブレーキコントローラ9と、統合コントローラ10とは、互いに情報交換が可能なCAN通信線11を介して接続されている。
【0022】
エンジンコントローラ1は、エンジン回転数センサ12からのエンジン回転数情報を入力し、統合コントローラ10からの目標エンジントルク指令等に応じ、エンジン動作点(Ne,Te)を制御する指令を、例えば、図外のスロットルバルブアクチュエータへ出力する。なお、エンジン回転数Neの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0023】
モータコントローラ2は、モータジェネレータMGのロータ回転位置を検出するレゾルバ13からの情報を入力し、統合コントローラ10からの目標モータジェネレータトルク指令等に応じ、モータジェネレータMGのモータ動作点(Nm,Tm)を制御する指令をインバータ3へ出力する。なお、このモータコントローラ2では、バッテリ4の充電状態を表すバッテリSOCを監視していて、バッテリSOC情報は、モータジェネレータMGの制御情報に用いると共に、CAN通信線11を介して統合コントローラ10へ供給する。
【0024】
第1クラッチコントローラ5は、第1クラッチ油圧センサ14と第1クラッチストロークセンサ15からのセンサ情報を入力し、統合コントローラ10からの第1クラッチ制御指令に応じ、第1クラッチCL1の締結・開放を制御する指令を第1クラッチ油圧ユニット6に出力する。なお、第1クラッチストロークC1Sの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0025】
ATコントローラ7は、アクセル開度センサ16と車速センサ17と第2クラッチ油圧センサ18と運転者の操作するシフトレバーの位置に応じた信号を出力するインヒビタスイッチ7aからのセンサ情報を入力し、統合コントローラ10からの第2クラッチ制御指令に応じ、第2クラッチCL2の締結・開放を制御する指令をAT油圧コントロールバルブ内の第2クラッチ油圧ユニット8に出力する。なお、アクセルペダル開度APOと車速VSPとインヒビタスイッチ7aの情報は、CAN通信線11を介して統合コントローラ10へ供給する。
【0026】
ブレーキコントローラ9は、4輪の各車輪速を検出する車輪速センサ19とブレーキストロークセンサ20からのセンサ情報を入力し、例えば、ブレーキ踏み込み制動時、ブレーキストロークBSから求められる要求制動力に対し回生制動力だけでは不足する場合、その不足分を機械制動力(液圧制動力やモータ制動力)で補うように、統合コントローラ10からの回生協調制御指令に基づいて回生協調ブレーキ制御を行う。
【0027】
統合コントローラ10は、車両全体の消費エネルギを管理し、最高効率で車両を走らせるための機能を担うもので、モータ回転数Nmを検出するモータ回転数センサ21と、第2クラッチ出力回転数N2outを検出する第2クラッチ出力回転数センサ22と、第2クラッチトルクTCL2を検出する第2クラッチトルクセンサ23と、ブレーキ油圧センサ24と、第2クラッチCL2の温度を検知する温度センサ10aと、からの情報およびCAN通信線11を介して得られた情報を入力する。
【0028】
実施例1の構成では、後述するように第2クラッチCL2が自動変速機ATの変速段によって2種類存在する(フォワードブレーキB4とハイ&ローリバースクラッチC2)ため、それぞれの油温を検知可能なように複数設けられている。尚、温度センサ10aは、例えば第2クラッチCL2のスリップ量と第2クラッチCL2の締結容量から発熱量を推定演算する構成としてもよく、特に限定しない。
【0029】
また、統合コントローラ10は、エンジンコントローラ1への制御指令によるエンジンEの動作制御と、モータコントローラ2への制御指令によるモータジェネレータMGの動作制御と、第1クラッチコントローラ5への制御指令による第1クラッチCL1の締結・開放制御と、ATコントローラ7への制御指令による第2クラッチCL2の締結・開放制御と、を行う。
【0030】
更に、統合コントローラ10は、温度センサ10aの検知した第2クラッチCL2の温度が異常を表す所定値以上かどうかを監視し、所定値以上のときは、更に第2クラッチCL2が過熱されることを防止すべく、過熱時対応制御が実行される。この過熱時対応制御については後述する。
【0031】
以下に、図2に示すブロック図を用いて、実施例1の統合コントローラ10にて演算される制御を説明する。例えば、この演算は、制御周期10msec毎に統合コントローラ10で演算される。統合コントローラ10は、目標駆動力演算部100と、モード選択部200と、目標充放電演算部300と、動作点指令部400と、変速制御部500と、を有する。
【0032】
目標駆動力演算部100では、図3に示す目標駆動力マップを用いて、アクセルペダル開度APOと車速VSPとから、目標駆動力tFoOを演算する。
【0033】
モード選択部200では、図4に示すEV-HEV選択マップを用いて、アクセルペダル開度APOと車速VSPとから、目標モードを演算する。但し、バッテリSOCが所定値以下であれば、強制的に「HEV走行モード」を目標モードとする。また、EV-HEV選択マップには、低車速領域においてアクセルペダル開度APOが大きいときに、大きな駆動力を出力するために、WSCモードが設定されている。HEV→WSC切換線もしくはEV→WSC切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低い領域に設定されている。図4中斜線領域がHEV走行モードからWSC走行モードに切り換えられる領域であり、図4中網掛け領域がWSC走行モードからEV走行モードに切り換えられる領域となる。
【0034】
このモード選択部200には、更に、図10に示すように、過熱時対応EV-HEV選択マップを有する。この過熱時対応EV-HEV選択マップは、通常制御時におけるEV-HEV選択マップに比べて、EV→HEV切換線に囲まれた領域、すなわちHEV走行モードに切り換えられる前のEV走行モード領域が広く設定されている。また、HEV走行モードからEV走行モードへ切り換えるHEV→EV切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったときにのみモード切り換えを許可するように設定されている。言い換えると、EV走行モードの時は極力EV走行モードを維持するように制御され、一旦HEV走行モードに切り換えられたときは、極力HEV走行モードを維持するように制御される。
【0035】
目標充放電演算部300では、図5に示す目標充放電量マップを用いて、バッテリSOCから目標充放電電力tPを演算する。この目標充放電演算部300には、更に、図11に示すように、過熱時対応目標充放電量マップを有する。この過熱時対応目標充放電量マップは、通常制御時における目標充放電量マップに比べて高いSOCにおいても積極的に充電要求を出力するように設定されている。
【0036】
動作点指令部400では、アクセルペダル開度APOと、目標駆動力tFoOと、目標モードと、車速VSPと、目標充放電電力tPとから、これらの動作点到達目標として、過渡的な目標エンジントルクと目標モータジェネレータトルクと目標第2クラッチ締結容量と目標自動変速シフトと第1クラッチソレノイド電流指令を演算する。また、動作点指令部400には、EV走行モードからHEV走行モードに遷移するときにエンジンEを始動するエンジン始動制御部が設けられている。
【0037】
ここで、エンジン始動制御について説明する。エンジン始動要求が成されると、第2クラッチCL2の締結容量を、エンジン始動前の出力軸トルクとなる締結容量に設定すると共に、モータジェネレータMGの駆動力を増大させる。すると、モータジェネレータMGに作用する負荷は、第2クラッチCL2の締結容量分のみであるため、過剰な駆動力によってモータジェネレータMGの回転数は上昇する。尚、TM出力トルクは第2クラッチCL2の締結容量によって決定されるため、TM出力トルクの変動はない。
【0038】
このとき、エンジン始動要求が成され、モータジェネレータMGの駆動力が十分に上昇したと見込まれるタイミング(例えばモータジェネレータMGの回転数がTM回転数よりも所定回転数以上高くなった段階等)において、第1クラッチCL1の締結容量を所定値まで上昇させるものであり、極力エンジンが素早く始動できるように上昇させる。
【0039】
第1クラッチCL1の締結容量が所定値まで上昇すると、モータジェネレータMGに作用する負荷が増大し、モータジェネレータMGのトルクもこの第1クラッチCL1の締結容量の上昇に伴って増大する。このとき、第1クラッチCL1の締結容量をエンジンの始動に必要なトルク程度の締結容量まで上昇させているため、エンジンEのクランキングが行われ、エンジンEが自立回転を始めることで、エンジン始動が完了する。すなわち、エンジン始動制御中は、第2クラッチCL2を継続的にスリップ状態とさせ、TM出力トルクの変動を極力抑制した状態で行われる。
【0040】
変速制御部500では、図6のシフトマップに示すシフトスケジュールに沿って、目標第2クラッチ締結容量と目標変速段を達成するように自動変速機AT内のソレノイドバルブを駆動制御する。尚、図6に示すシフトマップは、車速VSPとアクセルペダル開度APOに基づいて予め目標変速段が設定されたものであり、図6中実線がアップシフト線、点線がダウンシフト線を示す。また、図6中、2−3アップシフト線よりも1速側の領域が特許請求の範囲に記載の第1領域に相当し、2−3アップシフト線よりも5速側の領域が特許請求の範囲に記載の第2領域に相当する。
【0041】
この変速制御部500には、更に、図12に示すように、過熱時対応シフトマップを有する。この過熱時対応シフトマップは、通常制御時におけるシフトマップに比べ、2−3アップシフト線よりも1速側の領域が狭く変更され、2−3アップシフト線よりも5速側の領域が広く設定されている。言い換えると、通常制御時に比べて、3速より高い変速段での走行が増加するように設定されている。
【0042】
[自動変速機の構成について]
図7はハイブリッド車両の駆動系に採用された自動変速機ATのパワートレーンを示すスケルトン図、図8はハイブリッド車両の駆動系に採用された自動変速機ATによるクラッチ・ブレーキの締結作動表を示す図である。
【0043】
自動変速機ATは、図7に示すように、回転要素としてフロントサンギアS1とフロントキャリアPC1とフロントリングギアR1とを有するフロントプラネタリーギアG1と、回転要素としてミッドサンギアS2とミッドキャリアPC2とミッドリングギアR2とを有するミッドプラネタリーギアG2と、回転要素としてリアサンギアS3とリアキャリアPC3とリアリングギアR3とを有するリアプラネタリーギアG3と、による3組の単純遊星歯車を備えている。
【0044】
なお、図7中のINはモータジェネレータMGのみ、または、エンジンE及びモータジェネレータMGからダンパーを介して回転駆動トルクが入力されるインプットシャフトであり、OUTは自動変速機ATを経過して左右後輪RL,RRに回転駆動トルクを出力するアウトプットシャフトである。
【0045】
そして、前進5速後退1速の変速段を決める締結要素として、インプットクラッチC1と、ハイ&ローリバースクラッチC2と、ダイレクトクラッチC3と、リバースブレーキB1と、フロントブレーキB2と、ローコーストブレーキB3と、フォワードブレーキB4と、ファーストワンウェイクラッチF1と、サードワンウェイクラッチF2と、フォワードワンウェイクラッチF3と、を備えている。
【0046】
インプットクラッチC1は、開放時にフロントリングギアR1をインプットシャフトINに接続し、締結時にフロントリングギアR1とミッドリングギアR2とをインプットシャフトINに接続する。ハイ&ローリバースクラッチC2は、締結によりミッドサンギアS2とリアサンギアS3とを接続する。ダイレクトクラッチC3は、締結によりリアサンギアS3とリアキャリアPC3を接続する。
【0047】
リバースブレーキB1は、締結によりリアキャリアPC3をトランスミッションケースTCに固定する。フロントブレーキB2は、締結によりフロントサンギアS1をトランスミッションケースTCに固定する。ローコーストブレーキB3は、締結によりミッドサンギアS2をトランスミッションケースTCに固定する。フォワードブレーキB4は、締結によりミッドサンギアS2をトランスミッションケースTCに固定する。
【0048】
ファーストワンウェイクラッチF1は、ミッドサンギアS2に対してリアサンギアS3の正転方向(=エンジンと同一回転方向)の回転をフリー、逆転を固定する。サードワンウェイクラッチF2は、フロントサンギアS1の正転方向をフリー、逆転を固定する。フォワードワンウェイクラッチF3は、ミッドサンギアS2の正転方向をフリー、逆転を固定する。
【0049】
なお、アウトプットシャフトOUTは、ミッドキャリアPC2に直結されている。フロントキャリアPC1とリアリングギアR3とは第1メンバM1により直結されている。ミッドリングギアR2とリアキャリアPC3とは第2メンバM2により直結されている。
【0050】
自動変速機ATは、図8の締結作動表に示すように、ハイ&ローリバースクラッチC2とフロントブレーキB2とローコーストブレーキB3とフォワードブレーキB4を締結することで第1速を達成する。また、ダイレクトクラッチC3とフロントブレーキB2とローコーストブレーキB3とフォワードブレーキB4を締結することで第2速を達成する。また、ハイ&ローリバースクラッチC2とダイレクトクラッチC3とフロントブレーキB2とフォワードブレーキB4を締結することで第3速を達成する。
【0051】
また、インプットクラッチC1とハイ&ローリバースクラッチC2とダイレクトクラッチC3とフォワードブレーキB4を締結することで第4速を達成する。また、インプットクラッチC1とハイ&ローリバースクラッチC2とフロントブレーキB2とフォワードブレーキB4を締結することで第5速を達成する。また、ハイ&ローリバースクラッチC2とリバースブレーキB1とフロントブレーキB2を締結することで後退速を達成する。
【0052】
実施例1にあっては、第2クラッチCL2として、1速及び2速のとき(特許請求の範囲に記載の第1の変速段に相当)はフォワードブレーキB4(特許請求の範囲に記載の第2締結要素に相当)が選択され、3速〜5速のとき(特許請求の範囲に記載の第2の変速段に相当)はハイ&ローリバースクラッチC2(特許請求の範囲に記載の第3締結要素に相当)が選択される。
【0053】
〔過熱時対応制御〕
次に、第2クラッチCL2の過熱時対応制御処理について説明する。図9は過熱時対応制御処理を表すフローチャートである。
【0054】
ステップS10では、第2クラッチCL2が過熱したかどうかを判定し、過熱していると判定したときはステップS15へ進み、それ以外のときは本制御フローを終了する。尚、第2クラッチCL2の具体的な判定は、温度センサ10aにより検知された温度が、所定値以上かどうかにより判定する。この所定値は、これ以上温度が過熱した状態が継続、もしくはこれ以上の熱入力があった場合、例えば、クラッチプレートが焼き付いて締結故障を起こす虞がある温度に設定されている。
【0055】
ステップS15では、目標充放電量マップ(図5参照)を過熱時対応目標充放電量マップ(図11参照)に切り換えると共に、シフトマップ(図6参照)を過熱時対応シフトマップ(図10参照)に切り換える。
【0056】
ステップS20では、車両が停車中かどうかを判定し、停車中と判定したときはステップS25へ進み、それ以外のときはステップS45へ進む。尚、車両の停車判定は、例えば車輪速センサ19からのセンサ信号が0,車速センサ17からのセンサ信号が0,もしくはインヒビタスイッチ7aからの信号がパーキングレンジ位置等を示す場合に停車と判定すればよく、特に限定しない。
【0057】
(車両停車時制御)
ステップS25では、過熱時対応充放電量マップに基づいて発電要求があるかどうかを判定し、発電要求があるときはステップS30へ進み、それ以外のときはステップS40へ進む。
【0058】
ステップS30では、発進意図があるか否かを判定し、発進意図があるときはステップS35へ進み、それ以外のときはステップS40へ進む。尚、発進意図とは、運転者が車両停止状態から所定の操作を行って発進しようとしているか否かを表す信号を検知すればよい。具体的には、インヒビタスイッチ7aの信号がパーキングレンジ位置からドライブレンジ等の走行レンジに切り換えられたか否か、もしくはブレーキストロークセンサ20からの信号が、ブレーキペダルを離そうとしているか否かから適宜判定することができる。尚、アクセル開度センサ16の信号は、上記センサの信号が出力された後に出力されるため、発進意図の判定としては遅れることとなる。
【0059】
ステップS35では、発電モードに切り換える。具体的には、エンジンEの動力を利用してモータジェネレータMGを発電機として動作させる。
【0060】
ステップS40では、EV走行モードに切り換える。
【0061】
(車両走行時制御)
ステップS45では、現在の走行モードがEV走行モードか否かを判定し、EV走行モードのときはステップS50に進み、それ以外のときはステップS55に進む。
【0062】
ステップS50では、エンジンEの始動条件を変更する。具体的には、モード選択部200ににおいて、EV-HEV選択マップ(図4参照)から過熱時対応EV-HEV選択マップ(図10参照)に切り換えられる。
【0063】
ステップS55では、車速VSPによるエンジン停止要求がなされているかどうかを判定し、エンジン停止要求がなされていると判定したときはステップS60へ進んでEV走行モードに切り換え、エンジン停止要求がなされていないと判定したときはステップS65へ進んでHEV走行モードに切り換える。尚、この車速VSPによる判定とは、上述したように、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったか否かを判定しているものであり、過熱時対応EV-HEV選択マップに設定されたものである。
【0064】
〔過熱時対応制御による作用〕
次に、上記過熱時対応制御による作用について場合に分けて説明する。尚、第2クラッチCL2としてフォワードブレーキB4が過熱した状態であって、目標充放電量マップとシフトマップがそれぞれ過熱時対応目標充放電量マップと過熱時対応シフトマップに切り換えられている点を前提とする。これにより、通常制御時よりも積極的にバッテリ4に充電するように設定されると共に、通常制御時よりも過熱したフォワードブレーキB4を使用しない変速段を積極的に使用するように設定される。
【0065】
(車両停止中の場合)
車両が停止しているときは、発電モードに設定される。これにより、バッテリ4のSOCを高くすることができる。バッテリSOCが高いと、発進した後にEV走行モードにて走行可能な状態を長く維持することができるため、フォワードブレーキB4をスリップ制御しなければならない状態を極力回避することができる。
【0066】
(車両停止中から発進する場合)
車両停止中では発電モードが選択されているため、第1クラッチCL1が締結し、第2クラッチCL2(フォワードブレーキB4)は解放された状態である。この状態から発進する場合、第2クラッチCL2の過熱時には、第2クラッチCL2のスリップ制御を回避するために、WSC走行モードではなく、EV走行モードにより発進を行う。尚、通常制御時にあっては、図4のEV-HEV選択モードマップに示すようにWSC走行モードが選択される可能性があるが、過熱時対応制御中には、図10のEV-HEV選択モードマップに示すようにWSC走行モードが選択される余地はない。
【0067】
このとき、一旦第1クラッチCL1を解放し、その後、第2クラッチCL2を完全締結してから発進しなければならず、発進タイムラグが発生する虞がある。そこで、発進意図を検知し、この発進意図をトリガとして素早くEV走行モードに切り換える。これにより、運転者がアクセルペダルを踏み込んだと同時に駆動力を出力することが可能となり、応答性を確保することができる。
【0068】
(EV走行モードによる走行中の場合)
EV走行モードにより走行しているときは、エンジン始動条件を変更する。これにより、図10に示す過熱時対応EV-HEV選択マップが選択され、通常制御時におけるEV-HEV選択マップに比べて、EV→HEV切換線に囲まれた領域、すなわちHEV走行モードに切り換えられる前のEV走行モード領域が広く設定される。
【0069】
すなわち、EV走行モードからHEV走行モードに状態遷移する際には、エンジンEを始動しなければならない。エンジン始動時は、エンジン始動制御において上述したように、継続的に第2クラッチCL2をスリップ制御させる必要がある。よって、EV走行モードを極力維持することで、エンジン始動回数を減らすことが可能となり、第2クラッチCL2の更なる過熱を抑制することができる。
【0070】
また、HEV走行モードからEV走行モードへ切り換えるHEV→EV切換線は、自動変速機ATが1速段のときに、エンジンEのアイドル回転数よりも小さな回転数となる車速VSP1よりも低くなったときにのみモード切り換えを許可するように設定されている。よって、一旦EV走行モードからHEV走行モードに遷移した後は、可能な限りHEV走行モードを維持することで、再度EV走行モードからHEV走行モードに遷移することがない。言い換えると、エンジン始動制御を再度実行する必要が無く、第2クラッチCL2の更なる過熱を抑制することができる。
【0071】
(走行中の自動変速機の変速制御)
EV走行モード、もしくはHEV走行モードにより走行している際、通常のシフトマップとは異なる過熱時対応シフトマップにより変速制御が成される。よって、第2クラッチCL2であるフォワードブレーキB4が過熱している状態のときは、フォワードブレーキB4を解放し、過熱していないハイ&ローリバースクラッチC2を締結する変速段である3速,4速,5速を使用して走行することとなる。よって、過熱していないハイ&ローリバースクラッチC2によってエンジン始動制御等を行うシーンを増やすことで、第2クラッチCL2の耐久性の悪化を回避することができる。
【0072】
以上、各走行シーンに場合分けして説明したが、共通していることとして、第2クラッチCL2が過熱したときは、WSC走行モードを選択しないという点である。第2クラッチCL2のスリップ制御を伴う走行状態は極力回避しなければならないため、選択の余地としては、EV走行モードとHEV走行モードに限られる。
【0073】
また、EV走行モードとHEV走行モードの状態遷移においてエンジン始動制御に伴うスリップ制御が必要になるため、走行モードの状態遷移回数を減らす必要がある。
【0074】
これらを踏まえ、上記過熱時対応制御を実行することで、下記に列挙する作用効果を得ることができる。
【0075】
(1)車両停止状態からの発進時であって、第2クラッチCL2の温度が所定値以上のときは、EV走行モードに切り換えることとした。よって、WSC走行モードを選択しないため、第2クラッチCL2がスリップ制御されることがなく、第2クラッチCL2を完全締結状態として走行することが可能となり、更なる過熱を回避することができる。
【0076】
(2)第2クラッチCL2の温度が所定値以上のときは、バッテリ4の充電量が多くなるように制御することとした。具体的には、過熱時対応目標充放電マップを設定し、通常時よりも高いSOCであったとしても充電要求を行うこととした。これにより、EV走行モードを維持可能なシーンを増やすことが可能となり、EV走行モードからHEV走行モードに遷移する際に必要なエンジン始動制御に伴う第2クラッチCL2のスリップ制御回数を減らすことができる。
【0077】
(3)車両停止状態のときであって、第2クラッチCL2の温度が所定値以上のときは、発電モードに切り換えることとした。よって、効率よくバッテリSOCを高くすることができる。
【0078】
(4)運転者の発進意図が検知されたときは、発電モードからEV走行モードに切り換えることこととした。よって、発進時の応答性を確保することができる。
【0079】
(5)第2クラッチCL2の温度が所定値以上のときは、走行中にHEV走行モードに切り換えられた後は、WSC走行モードへの切り換えを禁止することとした。よって、第2クラッチCL2のスリップ制御を行う必要が無く、更なる過熱を回避することができる。
【0080】
(6)フォワードブレーキB4の温度が所定値未満のときは、通常シフトマップに基づいて自動変速機ATの変速段を選択し、第2クラッチCL2の温度が所定値以上のときは、1速及び2速の領域(第1領域)を狭く変更した過熱時対応シフトマップに基づいて自動変速機ATの変速段を選択することとした。
【0081】
よって、EV走行モードからHEV走行モードに遷移する際、3速,4速又は5速において遷移させるシーンが増え、エンジン始動制御に伴うスリップ制御を行ったとしても、フォワードブレーキB4の更なる過熱を回避することができる。
【0082】
尚、ハイ&ローリバースクラッチC2が過熱したときは、極力フォワードブレーキB4を使用する領域を増やせばよいのは言うまでもない。また、フォワードブレーキB4の温度が所定値以上のときは、3速,4速,5速のいずれかでのみEV走行モードからHEV走行モードへの遷移を許可するようにしてもよい。これにより、確実にフォワードブレーキB4の過熱を抑制することができる。
【0083】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。実施例1では、第2クラッチとして自動変速機に内蔵されたクラッチを利用する例を示したが、モータジェネレータと変速機との間に第2クラッチを追加して介装したり、または、変速機と駆動輪との間に第2クラッチを追加して介装(例えば、特開2002−144921号公報参照)しても良い。さらには、第1クラッチ(エンジンクラッチ)のみを持つハイブリッド車両にも適用できるし、第1クラッチ及び第2クラッチを持たずハイブリッド走行モードと電気自動車走行モードを達成するハイブリッド車両にも適用できる。モータは、効率等の影響はあるにせよ、回転数とトルクを独立に制御できるからである。
【0084】
要するに、動力源にエンジンとモータを備え、走行モードとして、モータのみを動力源として走行するモータ使用走行モードと、エンジンを動力源に含みながら走行するエンジン使用走行モードと、を有するハイブリッド車両であれば適用できる。
【図面の簡単な説明】
【0085】
【図1】実施例1の発進時エンジン始動制御装置が適用された後輪駆動のハイブリッド車両を示す全体システム図である。
【図2】実施例1の統合コントローラにおける演算処理プログラムを示す制御ブロック図である。
【図3】図2の目標駆動力演算部にて目標駆動力演算に用いられる目標駆動力マップの一例を示す図である。
【図4】図2のモード選択部にて目標モードの選択に用いられるEV-HEV選択マップを示す図である。
【図5】図2の目標充放電演算部にて目標充放電電力の演算に用いられる目標充放電量マップの一例を示す図である。
【図6】実施例1の自動変速機の通常時シフトマップである。
【図7】実施例1の自動変速機のスケルトン図である。
【図8】実施例1の自動変速機の締結作動表である。
【図9】実施例1の過熱時対応制御を表すフローチャートである。
【図10】実施例1の過熱時対応EV-HEV選択マップである。
【図11】実施例1の過熱時対応も起票充放電量マップである。
【図12】実施例1の自動変速機の過熱時対応シフトマップである。
【符号の説明】
【0086】
E エンジン
FW フライホイール
CL1 第1クラッチ
MG モータジェネレータ
CL2 第2クラッチ
AT 自動変速機
PS プロペラシャフト
DF ディファレンシャル
DSL 左ドライブシャフト
DSR 右ドライブシャフト
RL 左後輪(駆動輪)
RR 右後輪(駆動輪)
FL 左前輪
FR 右前輪
1 エンジンコントローラ
2 モータコントローラ
3 インバータ
4 バッテリ
5 第1クラッチコントローラ
6 第1クラッチ油圧ユニット
7 ATコントローラ
8 第2クラッチ油圧ユニット
9 ブレーキコントローラ
10 統合コントローラ
24 ブレーキ油圧センサ
100 目標駆動力演算部
200 モード選択部
300 目標充放電演算部
400 動作点指令部
500 変速制御部
【特許請求の範囲】
【請求項1】
エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記制御手段は、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
エンジンと、
モータと、
前記モータに電力を供給するバッテリと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて選択する制御手段と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、前記バッテリの充電量が多くなるように制御することを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド車両の制御装置において、
前記モータは、駆動と回生を可能なモータジェネレータであり、
前記制御手段は、車両停止状態のときであって、前記第2締結要素の温度が所定値以上のときは、前記第1締結要素を締結し前記第2締結要素を解放し前記エンジンの駆動力により前記モータを発電させる発電モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項3に記載のハイブリッド車両の制御装置において、
運転者の発進意図を検知する発進意図検知手段を設け、
前記制御手段は、発進意図が検知されたときは、前記発電モードから前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1ないし4いずれか1つに記載のハイブリッド車両の制御装置において、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、走行中に第2走行モードに切り換えられた後は、前記第3走行モードへの切り換えを禁止することを特徴とするハイブリッド車両の制御装置。
【請求項6】
請求項1ないし5いずれか1つに記載のハイブリッド車両の制御装置において、
前記モータと前記駆動輪との間に、前記第2締結要素により動力伝達経路を確保する第1の変速段と、前記第2締結要素を解放して第3締結要素により動力伝達経路を確保する第2の変速段とを有する自動変速機と、
前記第1締結要素が解放された状態から、前記モータの駆動力を増大させると共に前記第1締結要素の締結容量を上昇させ、前記モータと前記駆動輪の間の締結要素の締結容量を、前記エンジン始動前の伝達トルクとなる締結容量に設定するエンジン始動制御手段と、
を設け、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、前記第2の変速段のときのみ前記第1走行モードから前記第2走行モードもしくは第3走行モードへ切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項7】
請求項6に記載のハイブリッド車両の制御装置において、
前記第1の変速段が設定された第1領域と、前記第2の変速段が設定された第2領域とを有し、車両の走行状態が属する領域に設定された変速段を選択するシフトマップと、
前記第2締結要素の温度が所定値未満のときは、前記通常シフトマップに基づいて前記自動変速機の変速段を選択し、前記第2締結要素の温度が所定値以上のときは、前記第1領域を狭く変更したシフトマップに基づいて前記自動変速機の変速段を選択する変速制御手段と、
を設けたことを特徴とするハイブリッド車両の制御装置。
【請求項8】
エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える場合、
車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御方法。
【請求項1】
エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える制御手段と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記制御手段は、車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
エンジンと、
モータと、
前記モータに電力を供給するバッテリと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて選択する制御手段と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、前記バッテリの充電量が多くなるように制御することを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド車両の制御装置において、
前記モータは、駆動と回生を可能なモータジェネレータであり、
前記制御手段は、車両停止状態のときであって、前記第2締結要素の温度が所定値以上のときは、前記第1締結要素を締結し前記第2締結要素を解放し前記エンジンの駆動力により前記モータを発電させる発電モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項3に記載のハイブリッド車両の制御装置において、
運転者の発進意図を検知する発進意図検知手段を設け、
前記制御手段は、発進意図が検知されたときは、前記発電モードから前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1ないし4いずれか1つに記載のハイブリッド車両の制御装置において、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、走行中に第2走行モードに切り換えられた後は、前記第3走行モードへの切り換えを禁止することを特徴とするハイブリッド車両の制御装置。
【請求項6】
請求項1ないし5いずれか1つに記載のハイブリッド車両の制御装置において、
前記モータと前記駆動輪との間に、前記第2締結要素により動力伝達経路を確保する第1の変速段と、前記第2締結要素を解放して第3締結要素により動力伝達経路を確保する第2の変速段とを有する自動変速機と、
前記第1締結要素が解放された状態から、前記モータの駆動力を増大させると共に前記第1締結要素の締結容量を上昇させ、前記モータと前記駆動輪の間の締結要素の締結容量を、前記エンジン始動前の伝達トルクとなる締結容量に設定するエンジン始動制御手段と、
を設け、
前記制御手段は、前記第2締結要素の温度が所定値以上のときは、前記第2の変速段のときのみ前記第1走行モードから前記第2走行モードもしくは第3走行モードへ切り換えることを特徴とするハイブリッド車両の制御装置。
【請求項7】
請求項6に記載のハイブリッド車両の制御装置において、
前記第1の変速段が設定された第1領域と、前記第2の変速段が設定された第2領域とを有し、車両の走行状態が属する領域に設定された変速段を選択するシフトマップと、
前記第2締結要素の温度が所定値未満のときは、前記通常シフトマップに基づいて前記自動変速機の変速段を選択し、前記第2締結要素の温度が所定値以上のときは、前記第1領域を狭く変更したシフトマップに基づいて前記自動変速機の変速段を選択する変速制御手段と、
を設けたことを特徴とするハイブリッド車両の制御装置。
【請求項8】
エンジンと、
モータと、
前記エンジンと前記モータとの間に介装され前記エンジンと前記モータとを断接する第1締結要素と、
前記モータと駆動輪との間に介装され前記モータと前記駆動輪とを断接する第2締結要素と、
前記第2締結要素の温度を検知する温度検知手段と、
を有し、
前記第1締結要素を解放し前記第2締結要素を締結し前記モータの駆動力のみで走行する第1走行モードと、前記第1締結要素及び前記第2締結要素を締結し前記エンジンと前記モータの両方の駆動力で走行する第2走行モードと、前記第1締結要素を締結し前記第2締結要素をスリップ締結し前記エンジンと前記モータの両方の駆動力で走行する第3走行モードとを走行状態に応じて切り換える場合、
車両停止状態からの発進時であって、前記第2締結要素の温度が所定値以上のときは、前記第1走行モードに切り換えることを特徴とするハイブリッド車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−314097(P2007−314097A)
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願番号】特願2006−147583(P2006−147583)
【出願日】平成18年5月29日(2006.5.29)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願日】平成18年5月29日(2006.5.29)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]