
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンと電動モータを有する走行用駆動源と駆動輪との間に、発進時やエンジン始動制御時等においてスリップ制御するクラッチを介装したハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
従来、エンジンと1モータ・2クラッチの駆動系を備え、発進クラッチへの入力軸回転数が低下した時、発進クラッチの目標トルク容量を減少補正させるハイブリッド車両の制御装置が知られている(例えば、特許文献1参照)。
【0003】
この従来装置では、スリップ状態を確保する目標入力軸回転数より実入力軸回転数が低下した場合、入力軸回転数偏差を無くすように、発進クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。この目標トルク容量を減少補正する制御により、駆動負荷を軽減し、入力軸回転数の上昇を促すことで、モータトルクを増加することができない状況であっても、発進クラッチのスリップ状態(目標入力軸回転数状態)を維持させることを狙っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−70138号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来装置にあっては、発進クラッチのばらつきによる容量過多のシーンでの入力軸回転数の低下等を想定し、目標駆動トルクの大きさにかかわらず、発進クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。このため、目標駆動トルクが低目標駆動トルク域で本制御を実施した場合、例えば、エンジントルク不足等での入力軸回転数の低下時にも、入力軸回転数を維持するために発進クラッチの締結トルク容量を下げてしまう。したがって、発進クラッチをスリップ制御しながら車両を発進させるとき、発進クラッチを介して駆動輪へ伝達する駆動トルクが小さくなり過ぎたり、完全に無くなったりするおそれがある。この結果、平坦路発進時において、ブレーキ解除操作を行っても車両が発進しなかったり、登坂路発進時において、ブレーキ解除操作に伴い車両がずり下がったりする等、の問題が発生する。
【0006】
本発明は、上記問題に着目してなされたもので、クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保することができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明のハイブリッド車両の制御装置は、エンジンおよび電動モータと、クラッチと、目標トルク容量補正手段と、クラッチ動作制御手段と、を備える手段とした。
前記エンジンおよび電動モータは、走行用駆動源に設けられ、少なくともアクセル開度により決められる目標駆動トルクを実現する。
前記クラッチは、前記電動モータと駆動輪の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数とし、クラッチ締結トルクを目標トルク容量とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行う。
前記目標トルク容量補正手段は、前記クラッチへのスリップ要求時、前記目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。
前記クラッチ動作制御手段は、前記クラッチのスリップ制御中、前記目標駆動トルクが所定値以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止する。
【発明の効果】
【0008】
よって、電動モータと駆動輪の間に介装されたクラッチのスリップ制御中、目標駆動トルクが所定値以下のとき、クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御の実施が停止される。
すなわち、目標駆動トルクが所定値以下のときには、減少補正前のクラッチの目標トルク容量そのものが小さいため、入力軸回転数フィードバック制御が介入すると、目標トルク容量がさらに小さくなったり、目標トルク容量が完全に無くなったりする。
これに対し、目標駆動トルクが所定値以下のとき、入力軸回転数フィードバック制御を停止により非介入にすることで、減少補正前の目標トルク容量により得られるクラッチ締結トルク相当の駆動トルクが、スリップ制御中のクラッチを介して駆動輪へ伝達される。
一方、クラッチスリップ制御中、目標駆動トルクが所定値を超えると、クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御が実施される。
すなわち、入力軸回転数偏差があるとき、入力軸回転数フィードバック制御が介入することにより、クラッチ上流側の走行用駆動源にとって駆動負荷が低下し、クラッチの入力軸回転数の上昇が促され、目標入力軸回転数(クラッチスリップ状態)に到達する。
したがって、駆動源のトルクを増加することができない状況であっても、また、容量過多のばらつきを持つクラッチであっても、クラッチスリップが維持される。
この結果、クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保することができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。
【図2】実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。
【図3】実施例1の統合コントローラを示す演算ブロック図である。
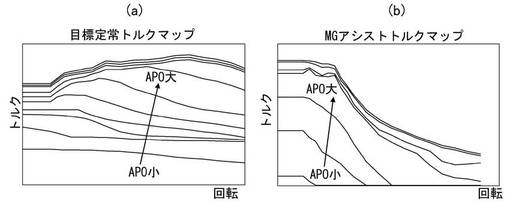
【図4】実施例1の制御装置で用いられる定常目標トルクマップ(a)とMGアシストトルクマップ(b)を示すマップ図である。
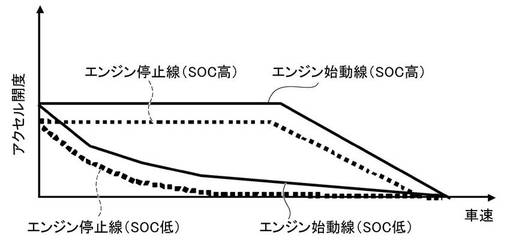
【図5】実施例1の制御装置で用いられるエンジン始動停止線マップを示すマップ図である。
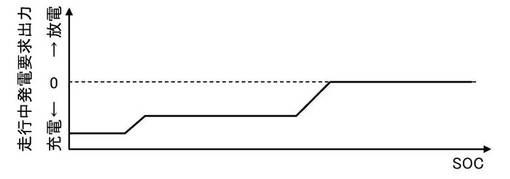
【図6】実施例1の制御装置で用いられるバッテリSOCに対する走行中要求発電出力を示す特性図である。
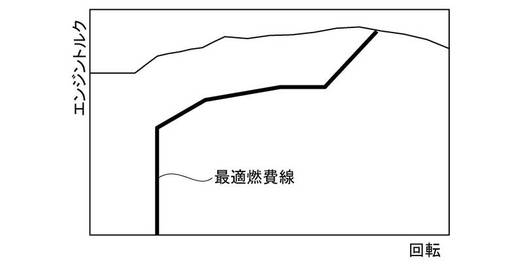
【図7】実施例1の制御装置で用いられるエンジンの最良燃費線を示す特性図である。
【図8】実施例1の自動変速機における変速線の一例を示す変速マップ図である。
【図9】実施例1の統合コントローラの動作点指令部に有する入力軸回転数F/B制御による目標MGトルクと目標CL2トルク容量による第2クラッチ動作制御処理の構成を示す制御ブロック図である。
【図10】実施例1の統合コントローラにて実行される第2クラッチ動作制御処理の流れを示すフローチャートである。
【図11】実施例1の制御装置を搭載したハイブリッド車両がブレーキ操作による停車状態からブレーキ解除操作による発進状態を経由してアクセル踏み込み操作による発進状態へ移行するときのアクセル・ブレーキ・目標駆動トルク・入力軸回転数・発進クラッチによる入力軸回転数F/B許可判定・F/Bトルク量・発進クラッチ最終トルクの各特性を示すタイムチャートである。
【発明を実施するための形態】
【0010】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
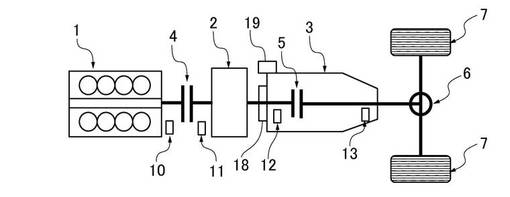
図1は、実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。以下、図1に基づき、パワートレイン構成を説明する。
【0012】
実施例1のハイブリッド車両のパワートレイン系には、図1に示すように、エンジン1と、モータジェネレータ2(電動モータ;以下、「MG」と記載する。)と、自動変速機3(以下、「AT」と記載する。)と、第1クラッチ4(以下、「CL1」と記載する。)と、第2クラッチ5(クラッチ、発進クラッチ;以下、「CL2」と記載する。)と、ディファレンシャルギア6と、タイヤ7,7と、を備えている。つまり、エンジン1と1モータ・2クラッチをパワートレイン系に備えた構成としている。
【0013】
前記エンジン1は、エンジン出力軸とモータジェネレータ2のモータ入力軸とが、トルク容量可変の第1クラッチ4を介して連結される。前記モータジェネレータ2は、モータ出力軸と自動変速機3の変速機入力軸とが、直接連結される。前記自動変速機3は、変速機出力軸にディファレンシャルギア6を介して駆動輪であるタイヤ7,7が連結される。
【0014】
前記第2クラッチ5は、自動変速機3のシフト状態に応じて異なる変速機内の動力伝達を担っているトルク容量可変のクラッチ・ブレーキによる複数の摩擦締結要素のうち、1つの摩擦締結要素を選択して用いている。これにより自動変速機3は、第1クラッチ4を介して入力されるエンジン1の動力と、モータジェネレータ2から入力される動力と、を合成してタイヤ7,7へ出力する。
【0015】
前記第1クラッチ4としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる乾式単板クラッチや乾式多板クラッチ等を用いればよい。前記第2クラッチ5としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチや湿式多板ブレーキ等を用いればよい。このパワートレイン系には、第1クラッチ4の接続状態に応じて2つの運転モードがあり、第1クラッチ4を切断したCL1開放状態では、モータジェネレータ2の動力のみで走行するEVモード(電気自動車走行モード)である。一方、第1クラッチ4を接続したCL1締結状態では、エンジン1とモータジェネレータ2の動力で走行するHEVモード(ハイブリッド車走行モード)である。
【0016】
前記パワートレインには、エンジン1の回転数を検出するエンジン回転センサ10と、モータジェネレータ2の回転数を検出するMG回転センサ11と、自動変速機3の入力軸回転数を検出するAT入力回転センサ12と、自動変速機3の出力軸回転数を検出するAT出力回転センサ13と、が設けられる。なお、モータジェネレータ2と第2クラッチ5の間のクラッチ入力軸には、機械式オイルポンプ18が設けられ、自動変速機3のケースには、電動サブオイルポンプ19が設けられる。
【0017】
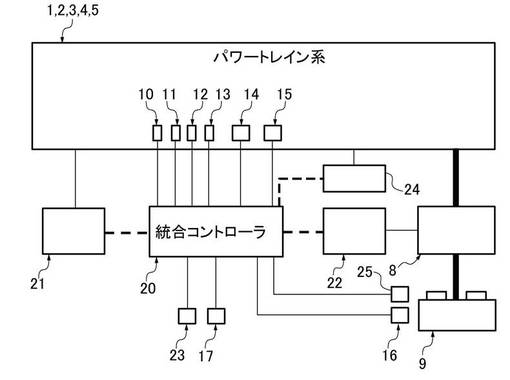
図2は、実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。以下、図2に基づいて、制御システム構成を説明する。
【0018】
実施例1の制御システムは、図2に示すように、統合コントローラ20と、エンジンコントローラ21と、モータコントローラ22と、インバータ8と、バッテリ9と、ソレノイドバルブ14と、ソレノイドバルブ15と、アクセル開度センサ17と、ブレーキ油圧センサ23と、SOCセンサ16と、電動サブオイルポンプコントローラ24と、バッテリ電流/電圧センサ25と、を備えている。
【0019】
前記統合コントローラ20は、パワートレイン系の動作点を統合制御する。この統合コントローラ20では、アクセル開度APOと、バッテリ充電状態SOCと、車速VSP(自動変速機出力軸回転数に比例)と、に応じて、運転者が望む駆動力を実現できる運転モードを選択する。そして、選択した運転モードに応じ、モータコントローラ22に対し目標MGトルクもしくは目標MG回転数を指令し、エンジンコントローラ21に対し目標エンジントルクを指令し、ソレノイドバルブ14,15に対し駆動信号を指令する。
【0020】
前記エンジンコントローラ21は、エンジン1を制御する。前記モータコントローラ22は、モータジェネレータ2を制御する。前記インバータ8は、モータジェネレータ2を駆動する。前記バッテリ9は、電気エネルギーを蓄える。前記ソレノイドバルブ14は、第1クラッチ4の油圧を制御する。前記ソレノイドバルブ15は、第2クラッチ5の油圧を制御する。前記アクセル開度センサ17は、アクセル開度(APO)を検出する。前記ブレーキ油圧センサ23は、ブレーキ油圧(BPS)を検出する。前記SOCセンサ16は、バッテリ9の充電容量状態を検出する。前記電動サブオイルポンプコントローラ24は、電動サブオイルポンプ19を制御する。前記バッテリ電流/電圧センサ25は、バッテリ9の電流と電圧を検出する。
【0021】
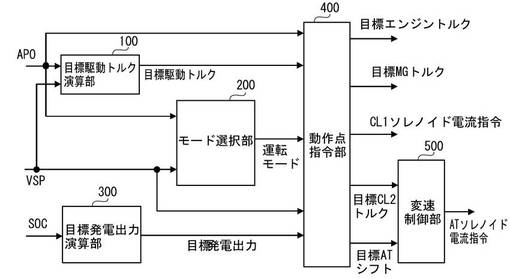
図3は、実施例1の統合コントローラ20を示す演算ブロック図である。以下、図3に基づいて、統合コントローラ20の構成を説明する。
【0022】
前記統合コントローラ20は、図3に示すように、目標駆動トルク演算部100と、モード選択部200と、目標発電出力演算部300と、動作点指令部400と、変速制御部500と、を備えている。
【0023】
前記目標駆動トルク演算部100は、図4(a)に示す目標定常駆動トルクマップと、図4(b)に示すMGアシストトルクマップを用いて、アクセル開度APOと車速VSPから、目標定常駆動トルクとMGアシストトルクを算出する。
【0024】
前記モード選択部200は、車速VSPおよびアクセル開度APOと、図5に示すエンジン始動停止線マップと、を用いて、運転モード(HEVモード、EVモード)を演算する。エンジン始動線とエンジン停止線は、エンジン始動線(SOC高、SOC低)とエンジン停止線(SOC高、SOC低)の特性に代表されるように、バッテリSOCが低くなるにつれて、アクセル開度APOが小さくなる方向に低下する特性として設定されている。なお、エンジン始動は、EVモード状態で図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えた時点で、スリップ締結状態が実現可能なように第2クラッチ5の締結トルク容量をドライバー要求駆動トルク相当に制御する。そして、第2クラッチ5がスリップ開始したとの判断後に第1クラッチ4の締結を開始してエンジン回転を上昇させる。エンジン回転が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、モータ回転数とエンジン回転数が近くなった時点で第1クラッチ4を完全に締結する。その後、第2クラッチ5をロックアップさせてHEVモードに遷移させる処理により行われる。
【0025】
前記目標発電出力演算部300は、図6に示す走行中発電要求出力マップを用いて、バッテリSOCから目標発電出力を演算する。また、現在の動作点から図7で示す最良燃費線までエンジントルクを上げるために必要な出力を演算し、前記目標発電出力と比較して少ない出力を要求出力として、エンジン出力に加算する。
【0026】
前記動作点指令部400では、アクセル開度APOと目標定常トルク,MGアシストトルクと目標モードと車速VSPと要求発電出力とを入力する。そして、これらの入力情報を動作点到達目標として、過渡的な目標エンジントルクと目標MGトルクと目標CL2トルク容量と目標変速比とCL1ソレノイド電流指令を演算する。
【0027】
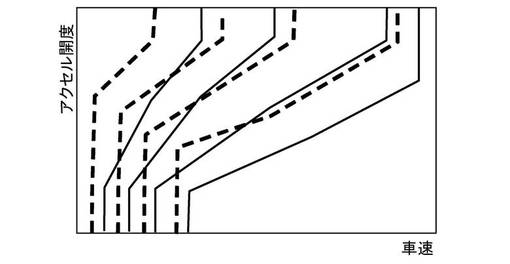
前記変速制御部500は、目標CL2トルク容量と目標変速比とから、これらを達成するように自動変速機3内のソレノイドバルブを駆動制御する。図8に変速制御で用いられる変速線マップの一例を示す。変速制御は、車速VSPとアクセル開度APOによる運転点と変速線マップに基づいて、現在のギヤ段から次ギヤ段をどのギヤ段にするかを判定する。そして、運転点が変速線マップのアップ変速線(図8の実線)またはダウン変速線(図8の点線)を横切るとアップ変速要求またはダウン変速要求を出し、変速要求に対応する自動変速機3の摩擦締結要素を締結/開放制御して変速させる。
【0028】
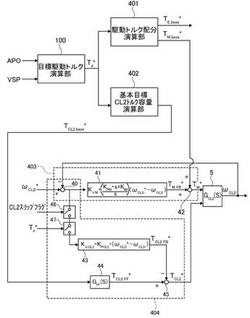
図9は、実施例1の統合コントローラ20に有する入力軸回転数F/B制御による目標MGトルクと目標CL2トルク容量の演算による第2クラッチ動作制御処理の構成を示す(クラッチ動作制御手段)。以下、図9に基づいて第2クラッチ動作制御構成を説明する。
【0029】
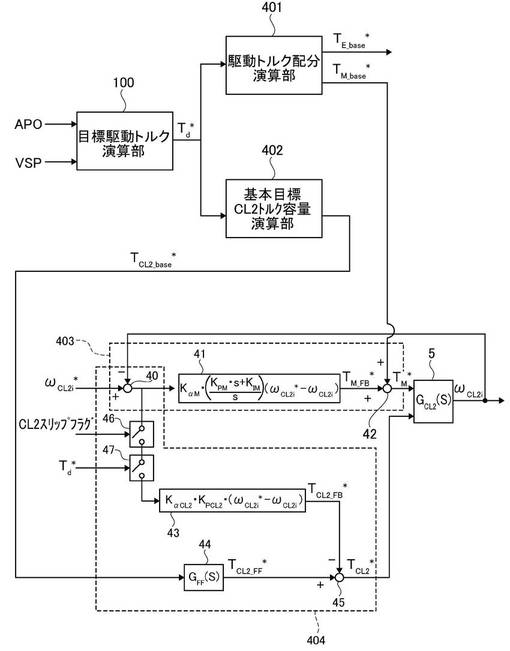
前記第2クラッチ5の動作制御構成は、図9に示すように、目標駆動トルク演算部100と、駆動トルク配分演算部401と、基本目標CL2トルク容量演算部402と、目標MGトルク演算部403(目標入力軸トルク補正手段)と、目標CL2トルク容量演算部404(目標トルク容量補正手段)と、を備えている。
【0030】
前記第2クラッチ5は、目標MGトルクTM*と目標CL2トルクTCL2*を入力し、これらの目標値に応じた制御指令にしたがって動作することで、実入力軸回転数ωCL2iを出力する。
【0031】
前記目標駆動トルク演算部100は、アクセル開度APOと車速VSPを入力し、目標駆動トルクマップ検索により、アクセル開度APOと車速VSPに適合する目標駆動トルクTd*を演算する。
【0032】
前記駆動トルク配分演算部401は、目標駆動トルク演算部100から目標駆動トルクTd*を入力し、選択される運転モード等に応じたトルク配分比に基づき、基本目標エンジントルクTE_base*と基本目標MGトルクTM_base*を演算する。
【0033】
前記基本目標CL2トルク容量演算部402は、目標駆動トルク演算部100から目標駆動トルクTd*を入力し、目標駆動トルクTd*に応じた基本目標CL2トルク容量TCL2_base*を演算する。
【0034】
前記目標MGトルク演算部403は、第2クラッチ5の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチ5への入力軸トルクである目標MGトルクTM*を増大補正する入力軸回転数F/B制御を実施する。この目標MGトルク演算部403は、加減算器40と、比例積分制御部41と、加算器42と、を有する。
前記加減算器40は、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの入力軸回転数偏差(ωCL2i*−ωCL2i)を演算する。ここで、目標入力軸回転数ωCL2i*は、図外の目標入力軸回転数演算部において、CL2スリップ制御での目標スリップ量と出力軸回転数を加算する式により求められる。
前記比例積分制御部41は、加減算器40から入力軸回転数偏差(ωCL2i*−ωCL2i)を入力し、枠内に記載の比例積分制御式(=PI制御式)を用いたF/B演算により、目標MGトルクF/B増大補正値TM_FB*を演算する。なお、PI制御式において、「KαM」はモータ調整用ゲイン、「KPM」はモータ制御用比例ゲイン、「KIM」はモータ制御用積分ゲインである。
前記加算器42は、比例積分制御部41からの目標MGトルクF/B増大補正値TM_FB*と、駆動トルク配分演算部401からの基本目標MGトルクTM_base*と、を加算することで、目標MGトルクTM*を演算する。
【0035】
前記目標CL2トルク容量演算部404は、第2クラッチ5の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチ5の目標トルク容量である目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。この目標CL2トルク容量演算部404は、加減算器40と、比例制御部43と、位相補償部44と、加減算器45と、第1F/B制御切替器46と、第2F/B制御切替器47と、を有する。
前記比例制御部43は、2つのF/B制御切替器46,47が入り側の演算条件成立時、加減算器40から入力軸回転数偏差(ωCL2i*−ωCL2i)を入力し、枠内に記載の比例制御式(=P制御式)を用いたF/B演算により、目標CL2トルク容量F/B値TCL2_FB*を演算する。なお、P制御式において、「KαCL2」は第2クラッチ調整用ゲイン、「KPCL2」は第2クラッチ制御用比例ゲインである。
前記位相補償部44は、基本目標CL2トルク容量演算部402からの基本目標CL2トルク容量TCL2_base*を入力し、位相補償フィルタGFF(S)を用いて目標CL2トルク容量F/F値TCL2_FF*を演算する。
前記加減算器45は、位相補償部44から入力された目標CL2トルク容量F/F値TCL2_FF*から、比例制御部43から入力された目標CL2トルク容量F/B値TCL2_FB*を減算することにより目標CL2トルク容量TCL2*を演算する。
前記第1F/B制御切替器46は、第2クラッチ5がスリップ制御中であることを示すCL2スリップフラグ=1であるとき、切替位置を入り側とする。
前記第2F/B制御切替器47は、目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、切替位置を切り側とし、目標駆動トルクTd*がクリープトルクを超える領域のとき、切替位置を入り側とする。
【0036】
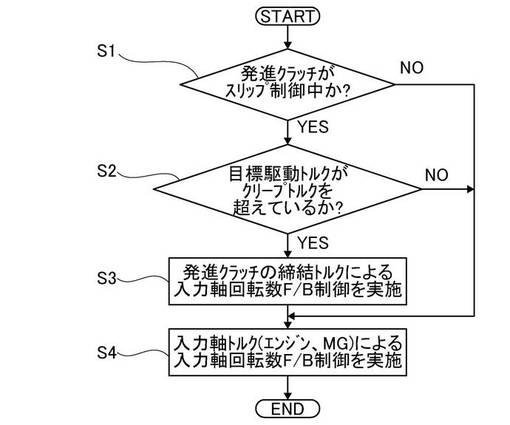
図10は、実施例1の統合コントローラ20にて実行される第2クラッチ動作制御処理の流れを示す。以下、図10の各ステップについて説明する。なお、このフローチャートは、所定の制御周期毎に実行される。
【0037】
ステップS1では、発進クラッチである第2クラッチ5がスリップ制御中であるか否かを判断する。YES(スリップ制御中)の場合はステップS2へ進み、NO(非スリップ制御中)の場合はステップS4へ進む。
【0038】
ステップS2では、ステップS1でのスリップ制御中であるとの判断に続き、目標駆動トルクTd*が、クリープトルクを超えているか否かを判断する。YES(目標駆動トルク>クリープトルク)の場合はステップS3へ進み、NO(目標駆動トルク≦クリープトルク)の場合はステップS4へ進む。
【0039】
ステップS3では、ステップS2での目標駆動トルク>クリープトルクであるとの判断に続き、目標CL2トルク容量演算部404において、発進クラッチである第2クラッチ5の締結トルクによる入力軸回転数F/B制御を実施し、ステップS4へ進む。
【0040】
ステップS4では、ステップS1での非スリップ制御中であるとの判断、あるいは、ステップS2での目標駆動トルク≦クリープトルクであるとの判断、あるいは、ステップS3での締結トルクによる入力軸回転数F/B制御の実施に続き、目標MGトルク演算部403において、入力軸トルク(エンジン、MG)による入力軸回転数F/B制御を実施し、エンドへ進む。
【0041】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における作用を、「発進域におけるCL2トルク容量制御作用」、「発進域におけるMGトルク制御作用」に分けて説明する。
【0042】
[比較例の課題]
まず、走行用駆動源に電動モータのみを有する電気自動車や燃料電池車の場合、エンジンと異なり電動モータは、制御目標を目標回転数とする回転数制御と、制御目標を目標トルクとするトルク制御を行える自由度があり、低回転で高トルクの出力が可能である。このため、駆動系に発進クラッチを設けなくても、停車時にモータ回転数を停止しておき、発進に伴ってモータ回転数を上げてゆくことで対応できる。
【0043】
また、走行用駆動源にエンジンのみを有するエンジン車の場合、電動モータと異なりエンジンは、例えば、低回転数であるほど低トルクというように、回転数とトルクとの間に一定の関係があり、制御自由度が低い。このため、駆動系に変速機を設けなければならないばかりでなく、アクセル足離し操作による停車時にエンジンがアイドル回転数相当で回転しているため、停車時に切り離しにより回転差を吸収する発進クラッチが必要である。そして、一般的なAT車の場合、エンジンの下流にトルクコンバータ付き自動変速機を搭載することで、流体継手であるトルクコンバータが、発進クラッチ機能とクリープトルク確保機能を担っている。
【0044】
一方、走行用駆動源にエンジンと電動モータを有するハイブリッド車両の場合、モータアシストタイプ駆動系を持つ車両は、常にエンジンと電動モータが一体に回転する。パラレルタイプ駆動系を持つ車両は、HEVモードの選択によりエンジンと電動モータが一体に回転する。したがって、停車時における走行用駆動源の回転数が、エンジンの拘束を受けてアイドル回転数により回転するため、走行用駆動源の下流位置には発進クラッチが必要であり、発進クラッチのスリップ締結制御により、クリープトルクを確保するようにしている。
【0045】
そこで、ハイブリッド車両において、発進クラッチのスリップ制御中、発進クラッチへの入力軸回転数が低下した時、発進クラッチの目標トルク容量を減少補正させ、発進クラッチのスリップ状態を維持させることを狙った制御を行うものを比較例とする。
【0046】
この比較例では、スリップ状態を確保する目標入力軸回転数に対し実入力軸回転数が低下したとき、入力軸回転数偏差を無くすように発進クラッチの目標トルク容量を減少補正する入力軸回転数F/B制御を実施する。この目標トルク容量を減少補正する制御により、駆動負荷が軽減され、入力軸回転数の上昇が促される。したがって、モータトルクを増加することができない状況であっても、発進クラッチのスリップ状態が維持される。
【0047】
しかし、この比較例にあっては、発進クラッチのばらつきによる容量過多のシーンでの入力軸回転数の低下等を想定し、目標駆動トルクの大きさにかかわらず、発進クラッチの目標トルク容量を減少補正する入力軸回転数F/B制御を必ず実施する。このため、目標駆動トルクが低目標駆動トルク域において本制御を実施する場合には、発進クラッチに容量過多のばらつきが無く、例えば、エンジントルク不足等を原因として入力軸回転数が低下した時にも、発進クラッチの締結トルク容量を下げてしまう。
【0048】
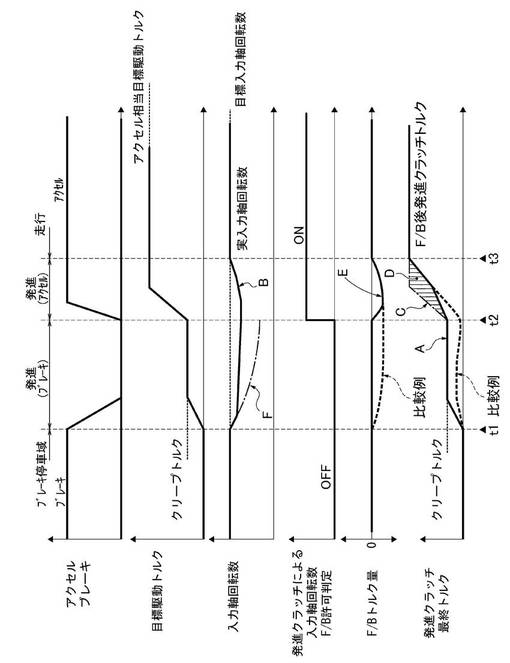
以下、目標駆動トルクと発進クラッチの目標締結トルク容量をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの比較例における作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、このブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数より実入力軸回転数が低下している。このため、入力軸回転数偏差に対する入力軸回転数F/B制御が実施され、図11の点線によるF/Bトルク量特性に示すように、入力軸回転数偏差に応じたF/Bトルク量が発生する。よって、発進クラッチ最終トルクは、図11の点線による発進クラッチ最終トルク特性に示すように、基本的に付与されるクリープトルクからF/Bトルク量を差し引いたものとなる。
【0049】
したがって、発進クラッチを介して駆動輪へ伝達される駆動トルクが小さくなり過ぎたり、発進クラッチのばらつきによっては、駆動輪へ伝達される駆動トルクが完全に無くなったりすることがある。この結果、例えば、平坦路発進時において、ブレーキ解除操作を行ったときに駆動輪への伝達駆動トルクが小さ過ぎて、車両が発進しないことがある。あるいは、登坂路発進時において、路面勾配負荷に比べて駆動輪への伝達駆動トルクが不足し、ブレーキ解除操作に伴い車両がずり下がったりする等、の課題が発生する。
【0050】
[発進域におけるCL2トルク容量制御作用]
上記課題を解決するには、第2クラッチ5(発進クラッチ)の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御に停止条件を加える必要がある。以下、これを反映する発進域におけるCL2トルク容量制御作用を説明する。
【0051】
第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のときには、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3で実施される第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が停止される。言い換えると、車両発進を意図してブレーキ解除操作を行う発進域においては、目標駆動トルクTd*がクリープトルク以下になるため、入力軸回転数F/B制御により減少補正される前の第2クラッチ5の目標CL2トルク容量TCL2*(=クリープトルク)が維持される。
【0052】
以下、目標駆動トルクTd*と第2クラッチ5の目標CL2トルク容量TCL2*をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、ブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。しかし、時刻t1から時刻t2までのブレーキ解除発進域では、目標駆動トルクTd*がクリープトルク以下であるため、入力軸回転数偏差(ωCL2i*−ωCL2i)に対して目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施が停止される。このため、図11の実線によるF/Bトルク量特性に示すように、F/Bトルク量(=TCL2_FB*)の発生が無い。よって、発進クラッチ最終トルク(=TCL2*)は、図11の実線による発進クラッチ最終トルク特性Aに示すように、基本的に付与されるクリープトルクが維持されたものとなる。
【0053】
したがって、比較例のように、発進クラッチを介して駆動輪へ伝達される駆動トルクが小さくなり過ぎたり、発進クラッチのばらつきによっては、駆動輪へ伝達される駆動トルクが完全に無くなったりすることが防止される。この結果、例えば、平坦路発進時においては、ブレーキ解除操作を行ったとき、タイヤ7,7への伝達駆動トルクにより車両のスムーズな発進が確保される。また、登坂路発進時においては、タイヤ7,7への伝達駆動トルクが路面勾配負荷に対抗するものとなり、ブレーキ解除操作を行っても登坂路停車が維持されるというように、ブレーキ解除操作に伴う車両のずり下がりが防止される。
【0054】
そして、発進駆動トルクの上昇を意図してアクセル踏み込み操作を行うことで目標駆動トルクTd*がクリープトルクを超えると、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3にて第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が実施される。
【0055】
以下、目標駆動トルクをアクセル開度APOに応じたトルクとし、スリップ制御しながらアクセル踏み込み操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t2にてアクセル踏み込み操作が開始されると、時刻t2では目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。しかし、時刻t2から時刻t3までのアクセル踏み込み発進域では、目標駆動トルクTd*がクリープトルクを超えるため、入力軸回転数偏差(ωCL2i*−ωCL2i)に対する入力軸回転数F/B制御が実施され、図11の実線によるF/Bトルク量特性Eに示すように、F/Bトルク量(=TCL2_FB*)が発生する。よって、発進クラッチ最終トルク(=目標CL2トルク容量TCL2*)は、図11の実線による発進クラッチ最終トルク特性に示すように、基本的に付与されるアクセル開度APOや車速VSPに応じた締結トルクC(=目標CL2トルク容量FF値TCL2_FF*)からF/Bトルク量(=目標CL2トルク容量FB値TCL2_FB*)を差し引いたものとなる。
【0056】
このように、目標駆動トルクTd*がクリープトルクを超えると目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の介入により、図11の矢印Dで示すハッチング領域のトルク分、走行用駆動源にとっての駆動負荷が低下する。このため、図11の実入力軸回転数特性Bに示すように、時刻t2には目標入力軸回転数ωCL2i*から乖離している第2クラッチ5の実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*へと収束を開始し、時刻t3にて目標入力軸回転数ωCL2i*まで上昇する。そして、時刻t3にて、実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*になると、入力軸回転数偏差(ωCL2i*−ωCL2i)が無くなる。つまり、実質的に目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の介入が無くなり、発進クラッチ最終トルク(=目標CL2トルク容量TCL2*)が減少補正前の発進クラッチ最終トルク(=目標CL2トルク容量FF値TCL2_FF*)まで復帰する。
【0057】
したがって、時刻t2〜時刻t3までの発進加速を意図するアクセル踏み込み発進域においては、実入力軸回転数ωCL2iの上昇により第2クラッチ5のスリップが維持されると共に、時刻t3以降は、目標トルク容量の復帰により、ドライバー要求に応える車両の発進性が確保される。
【0058】
上記のように、実施例1では、第2クラッチ5のスリップ制御中、目標駆動トルクTd*が所定値以下のとき、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止する構成を採用した。
この構成により、目標駆動トルクTd*が所定値以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が非介入となり、減少補正前の目標CL2トルク容量FF値TCL2_FF*が維持される。
したがって、クラッチスリップ制御中、目標駆動トルクTd*が所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクTd*が所定値以下のときにタイヤ7,7への駆動トルク伝達が確保される。
【0059】
上記のように、実施例1では、第2クラッチ5は、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチである。そして、第2クラッチ5のスリップ制御中、目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止する構成を採用した。
この構成により、目標駆動トルクTd*がクリープトルク以下か否かで、入力軸回転数F/B制御の停止により制御非介入になるか、入力軸回転数F/B制御の実施により制御介入になるかが切り分けられる。
したがって、クラッチスリップ制御中の発進時、アクセル踏み込み発進域での第2クラッチ5のスリップ締結を維持しつつ、ブレーキ解除発進域でのタイヤ7,7への駆動トルク伝達確保により、平坦路発進でのスムーズな発進が確保されるし、登坂路発進でのブレーキ解除操作に伴うずり下がりが防止される。
【0060】
[発進域におけるMGトルク制御作用]
上記のように、目標駆動トルクTd*がクリープトルク以下という条件で入力軸回転数F/B制御に停止させた場合、入力軸回転数F/B制御の停止に伴う影響を解消することが必要である。以下、これを反映する発進域におけるMGトルク制御作用を説明する。
【0061】
第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のときには、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3で実施されるべき第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が停止されるが、第2クラッチ5への入力軸トルクである目標MGトルクTM*を増大補正する入力軸回転数F/B制御の実施は維持される。
【0062】
以下、目標駆動トルクTd*と第2クラッチ5の目標CL2トルク容量TCL2*をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、ブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。この時刻t1から時刻t2までのブレーキ解除発進域では、目標駆動トルクTd*の大きさにかかわらず、入力軸回転数偏差(ωCL2i*−ωCL2i)に対して目標MGトルクTM*を増大補正する入力軸回転数F/B制御が実施される。この目標MGトルクTM*の増大補正によって実入力軸回転数ωCL2iの低下が抑えられることで、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの乖離幅が小さく保たれ、アクセル踏み込み操作を開始する時刻t2において、第2クラッチ5のスリップ締結状態が確保される。
【0063】
例えば、第2クラッチ5(発進クラッチ)の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御に停止条件を加えた場合において、時刻t1から時刻t2までの停止条件成立域において、他の入力軸回転数F/B制御を行わないとする。この場合、図11の1点鎖線による実入力時回転数特性Fに示すように、目標入力軸回転数ωCL2i*から徐々に離れるというように、実入力軸回転数ωCL2iの低下が時間の経過と共に進行し、実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*から大きく乖離する。
【0064】
これに対し、実施例1では、第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標MGトルク演算部403による入力軸回転数F/B制御を実施する構成を採用した。
この構成により、目標駆動トルクTd*がクリープトルク以下のとき、第2クラッチ5への入力軸トルクが増大補正され、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの乖離幅が小さく保たれる。
したがって、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止するブレーキ解除発進域において、目標MGトルク演算部403による入力軸回転数F/B制御を実施することにより、第2クラッチ5のスリップ締結状態が確保される。
【0065】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0066】
(1) 走行用駆動源に設けられ、少なくともアクセル開度APOにより決められる目標駆動トルクTd*を実現するエンジン1およびモータジェネレータ2(電動モータ)と、
前記モータジェネレータ2(電動モータ)とタイヤ7,7(駆動輪)の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数ωCL2i*とし、クラッチ締結トルクを目標トルク容量(目標CL2トルク容量TCL2*)とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行うクラッチ(第2クラッチ5)と、
前記クラッチ(第2クラッチ5)へのスリップ要求時、前記目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように前記クラッチ(第2クラッチ5)の目標トルク容量(目標CL2トルク容量TCL2*)を減少補正する入力軸回転数F/B制御を実施する目標トルク容量補正手段(目標CL2トルク容量演算部404)と、
前記クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*が所定値以下のとき、前記目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止するクラッチ動作制御手段(図9)と、
を備える。
このため、クラッチ(第2クラッチ5)のスリップ制御中、目標駆動トルクTd*が所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクTd*が所定値以下のときにタイヤ7,7(駆動輪)への駆動トルク伝達を確保することができる。
【0067】
(2) 前記クラッチは、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチ(第2クラッチ5)であり、
前記クラッチ動作制御手段(図9)は、前記発進クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、前記目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止する。
このため、(1)の効果に加え、クラッチスリップ制御中の発進時、アクセル踏み込み発進域での発進クラッチ(第2クラッチ5)のスリップ締結を維持しつつ、ブレーキ解除発進域での駆動輪(タイヤ7,7)への駆動トルク伝達確保により、平坦路発進でのスムーズな発進を確保することができるし、登坂路発進でのブレーキ解除操作に伴うずり下がりを防止することができる。
【0068】
(3) 前記発進クラッチ(第2クラッチ5)へのスリップ要求時、前記発進クラッチ(第2クラッチ5)の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように前記発進クラッチ(第2クラッチ5)への目標MGトルクTM*(目標入力軸トルク)を増大補正する入力軸回転数F/B制御を実施する目標入力軸トルク補正手段(目標MGトルク演算部403)を備え、
前記クラッチ動作制御手段(図9)は、前記発進クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*がクリープトルク以下のとき、前記目標入力軸トルク補正手段(目標MGトルク演算部403)による入力軸回転数F/B制御を実施する。
このため、上記(2)の効果に加え、目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止するブレーキ解除発進域において、目標入力軸トルク補正手段(目標MGトルク演算部403)による入力軸回転数F/B制御を実施することにより、発進クラッチ(第2クラッチ5)のスリップ締結状態を確保することができる。
【0069】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0070】
実施例1では、第2クラッチCL2を発進クラッチとする発進時に、入力軸回転数F/B制御を停止する例を示した。しかし、第2クラッチCL2をショック吸収クラッチとするエンジン始動時等において、入力軸回転数F/B制御を停止する場合に適用しても良い。この場合においても、クラッチスリップを維持しつつ、目標駆動トルクが所定値以下のとき、ドライバー要求による駆動輪への駆動トルク伝達を確保することができる。
【0071】
実施例1では、第2クラッチCL2を、有段式の自動変速機ATに内蔵した摩擦要素の中から選択する例を示した。しかし、自動変速機ATとは別に第2クラッチCL2を設けても良く、例えば、モータ/ジェネレータMGと変速機入力軸との間に自動変速機ATとは別に第2クラッチCL2を設ける例や、変速機出力軸と駆動輪の間に自動変速機ATとは別に第2クラッチCL2を設ける例も含まれる。
【0072】
実施例1では、HEVモードとEVモードを切り替えるモード切り替え手段として、第1クラッチ4を用いる例を示した。しかし、HEVモードとEVモードを切り替えるモード切り替え手段としては、例えば、プラネタリギア等のように、クラッチを用いることなくクラッチ機能を発揮するような差動装置や動力分割装置を用いる例としても良い。
【0073】
実施例1では、本発明の制御装置を、1モータ2クラッチによるパラレルタイプのハイブリッド車両に対し適用した例を示した。しかし、走行用駆動源に、互いに直結したエンジンとモータジェネレータを備えたモータアシストタイプのハイブリッド車両に対しても適用することができる。
【符号の説明】
【0074】
1 エンジン
2 モータジェネレータ(電動モータ)
3 自動変速機
4 第1クラッチ
5 第2クラッチ(クラッチ、発進クラッチ)
6 ディファレンシャルギア
7 タイヤ(駆動輪)
8 インバータ
9 バッテリ
10 エンジン回転センサ
11 MG回転センサ
12 AT入力回転センサ
13 AT出力回転センサ
14,15 ソレノイドバルブ
16 SOCセンサ
17 アクセル開度センサ
18 機械式オイルポンプ
19 電動サブオイルポンプ
20 統合コントローラ
21 エンジンコントローラ
22 モータコントローラ
23 ブレーキ油圧センサ
24 電動サブオイルポンプコントローラ
25 バッテリ電流/電圧センサ
100 目標駆動トルク演算部
401 駆動トルク配分演算部
402 基本目標CL2トルク容量演算部
403 目標MGトルク演算部(目標入力軸トルク補正手段)
404 目標CL2トルク容量演算部(目標トルク容量補正手段)
【技術分野】
【0001】
本発明は、エンジンと電動モータを有する走行用駆動源と駆動輪との間に、発進時やエンジン始動制御時等においてスリップ制御するクラッチを介装したハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
従来、エンジンと1モータ・2クラッチの駆動系を備え、発進クラッチへの入力軸回転数が低下した時、発進クラッチの目標トルク容量を減少補正させるハイブリッド車両の制御装置が知られている(例えば、特許文献1参照)。
【0003】
この従来装置では、スリップ状態を確保する目標入力軸回転数より実入力軸回転数が低下した場合、入力軸回転数偏差を無くすように、発進クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。この目標トルク容量を減少補正する制御により、駆動負荷を軽減し、入力軸回転数の上昇を促すことで、モータトルクを増加することができない状況であっても、発進クラッチのスリップ状態(目標入力軸回転数状態)を維持させることを狙っている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−70138号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来装置にあっては、発進クラッチのばらつきによる容量過多のシーンでの入力軸回転数の低下等を想定し、目標駆動トルクの大きさにかかわらず、発進クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。このため、目標駆動トルクが低目標駆動トルク域で本制御を実施した場合、例えば、エンジントルク不足等での入力軸回転数の低下時にも、入力軸回転数を維持するために発進クラッチの締結トルク容量を下げてしまう。したがって、発進クラッチをスリップ制御しながら車両を発進させるとき、発進クラッチを介して駆動輪へ伝達する駆動トルクが小さくなり過ぎたり、完全に無くなったりするおそれがある。この結果、平坦路発進時において、ブレーキ解除操作を行っても車両が発進しなかったり、登坂路発進時において、ブレーキ解除操作に伴い車両がずり下がったりする等、の問題が発生する。
【0006】
本発明は、上記問題に着目してなされたもので、クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保することができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明のハイブリッド車両の制御装置は、エンジンおよび電動モータと、クラッチと、目標トルク容量補正手段と、クラッチ動作制御手段と、を備える手段とした。
前記エンジンおよび電動モータは、走行用駆動源に設けられ、少なくともアクセル開度により決められる目標駆動トルクを実現する。
前記クラッチは、前記電動モータと駆動輪の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数とし、クラッチ締結トルクを目標トルク容量とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行う。
前記目標トルク容量補正手段は、前記クラッチへのスリップ要求時、前記目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する。
前記クラッチ動作制御手段は、前記クラッチのスリップ制御中、前記目標駆動トルクが所定値以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止する。
【発明の効果】
【0008】
よって、電動モータと駆動輪の間に介装されたクラッチのスリップ制御中、目標駆動トルクが所定値以下のとき、クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御の実施が停止される。
すなわち、目標駆動トルクが所定値以下のときには、減少補正前のクラッチの目標トルク容量そのものが小さいため、入力軸回転数フィードバック制御が介入すると、目標トルク容量がさらに小さくなったり、目標トルク容量が完全に無くなったりする。
これに対し、目標駆動トルクが所定値以下のとき、入力軸回転数フィードバック制御を停止により非介入にすることで、減少補正前の目標トルク容量により得られるクラッチ締結トルク相当の駆動トルクが、スリップ制御中のクラッチを介して駆動輪へ伝達される。
一方、クラッチスリップ制御中、目標駆動トルクが所定値を超えると、クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御が実施される。
すなわち、入力軸回転数偏差があるとき、入力軸回転数フィードバック制御が介入することにより、クラッチ上流側の走行用駆動源にとって駆動負荷が低下し、クラッチの入力軸回転数の上昇が促され、目標入力軸回転数(クラッチスリップ状態)に到達する。
したがって、駆動源のトルクを増加することができない状況であっても、また、容量過多のばらつきを持つクラッチであっても、クラッチスリップが維持される。
この結果、クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保することができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。
【図2】実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。
【図3】実施例1の統合コントローラを示す演算ブロック図である。
【図4】実施例1の制御装置で用いられる定常目標トルクマップ(a)とMGアシストトルクマップ(b)を示すマップ図である。
【図5】実施例1の制御装置で用いられるエンジン始動停止線マップを示すマップ図である。
【図6】実施例1の制御装置で用いられるバッテリSOCに対する走行中要求発電出力を示す特性図である。
【図7】実施例1の制御装置で用いられるエンジンの最良燃費線を示す特性図である。
【図8】実施例1の自動変速機における変速線の一例を示す変速マップ図である。
【図9】実施例1の統合コントローラの動作点指令部に有する入力軸回転数F/B制御による目標MGトルクと目標CL2トルク容量による第2クラッチ動作制御処理の構成を示す制御ブロック図である。
【図10】実施例1の統合コントローラにて実行される第2クラッチ動作制御処理の流れを示すフローチャートである。
【図11】実施例1の制御装置を搭載したハイブリッド車両がブレーキ操作による停車状態からブレーキ解除操作による発進状態を経由してアクセル踏み込み操作による発進状態へ移行するときのアクセル・ブレーキ・目標駆動トルク・入力軸回転数・発進クラッチによる入力軸回転数F/B許可判定・F/Bトルク量・発進クラッチ最終トルクの各特性を示すタイムチャートである。
【発明を実施するための形態】
【0010】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
図1は、実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。以下、図1に基づき、パワートレイン構成を説明する。
【0012】
実施例1のハイブリッド車両のパワートレイン系には、図1に示すように、エンジン1と、モータジェネレータ2(電動モータ;以下、「MG」と記載する。)と、自動変速機3(以下、「AT」と記載する。)と、第1クラッチ4(以下、「CL1」と記載する。)と、第2クラッチ5(クラッチ、発進クラッチ;以下、「CL2」と記載する。)と、ディファレンシャルギア6と、タイヤ7,7と、を備えている。つまり、エンジン1と1モータ・2クラッチをパワートレイン系に備えた構成としている。
【0013】
前記エンジン1は、エンジン出力軸とモータジェネレータ2のモータ入力軸とが、トルク容量可変の第1クラッチ4を介して連結される。前記モータジェネレータ2は、モータ出力軸と自動変速機3の変速機入力軸とが、直接連結される。前記自動変速機3は、変速機出力軸にディファレンシャルギア6を介して駆動輪であるタイヤ7,7が連結される。
【0014】
前記第2クラッチ5は、自動変速機3のシフト状態に応じて異なる変速機内の動力伝達を担っているトルク容量可変のクラッチ・ブレーキによる複数の摩擦締結要素のうち、1つの摩擦締結要素を選択して用いている。これにより自動変速機3は、第1クラッチ4を介して入力されるエンジン1の動力と、モータジェネレータ2から入力される動力と、を合成してタイヤ7,7へ出力する。
【0015】
前記第1クラッチ4としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる乾式単板クラッチや乾式多板クラッチ等を用いればよい。前記第2クラッチ5としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチや湿式多板ブレーキ等を用いればよい。このパワートレイン系には、第1クラッチ4の接続状態に応じて2つの運転モードがあり、第1クラッチ4を切断したCL1開放状態では、モータジェネレータ2の動力のみで走行するEVモード(電気自動車走行モード)である。一方、第1クラッチ4を接続したCL1締結状態では、エンジン1とモータジェネレータ2の動力で走行するHEVモード(ハイブリッド車走行モード)である。
【0016】
前記パワートレインには、エンジン1の回転数を検出するエンジン回転センサ10と、モータジェネレータ2の回転数を検出するMG回転センサ11と、自動変速機3の入力軸回転数を検出するAT入力回転センサ12と、自動変速機3の出力軸回転数を検出するAT出力回転センサ13と、が設けられる。なお、モータジェネレータ2と第2クラッチ5の間のクラッチ入力軸には、機械式オイルポンプ18が設けられ、自動変速機3のケースには、電動サブオイルポンプ19が設けられる。
【0017】
図2は、実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。以下、図2に基づいて、制御システム構成を説明する。
【0018】
実施例1の制御システムは、図2に示すように、統合コントローラ20と、エンジンコントローラ21と、モータコントローラ22と、インバータ8と、バッテリ9と、ソレノイドバルブ14と、ソレノイドバルブ15と、アクセル開度センサ17と、ブレーキ油圧センサ23と、SOCセンサ16と、電動サブオイルポンプコントローラ24と、バッテリ電流/電圧センサ25と、を備えている。
【0019】
前記統合コントローラ20は、パワートレイン系の動作点を統合制御する。この統合コントローラ20では、アクセル開度APOと、バッテリ充電状態SOCと、車速VSP(自動変速機出力軸回転数に比例)と、に応じて、運転者が望む駆動力を実現できる運転モードを選択する。そして、選択した運転モードに応じ、モータコントローラ22に対し目標MGトルクもしくは目標MG回転数を指令し、エンジンコントローラ21に対し目標エンジントルクを指令し、ソレノイドバルブ14,15に対し駆動信号を指令する。
【0020】
前記エンジンコントローラ21は、エンジン1を制御する。前記モータコントローラ22は、モータジェネレータ2を制御する。前記インバータ8は、モータジェネレータ2を駆動する。前記バッテリ9は、電気エネルギーを蓄える。前記ソレノイドバルブ14は、第1クラッチ4の油圧を制御する。前記ソレノイドバルブ15は、第2クラッチ5の油圧を制御する。前記アクセル開度センサ17は、アクセル開度(APO)を検出する。前記ブレーキ油圧センサ23は、ブレーキ油圧(BPS)を検出する。前記SOCセンサ16は、バッテリ9の充電容量状態を検出する。前記電動サブオイルポンプコントローラ24は、電動サブオイルポンプ19を制御する。前記バッテリ電流/電圧センサ25は、バッテリ9の電流と電圧を検出する。
【0021】
図3は、実施例1の統合コントローラ20を示す演算ブロック図である。以下、図3に基づいて、統合コントローラ20の構成を説明する。
【0022】
前記統合コントローラ20は、図3に示すように、目標駆動トルク演算部100と、モード選択部200と、目標発電出力演算部300と、動作点指令部400と、変速制御部500と、を備えている。
【0023】
前記目標駆動トルク演算部100は、図4(a)に示す目標定常駆動トルクマップと、図4(b)に示すMGアシストトルクマップを用いて、アクセル開度APOと車速VSPから、目標定常駆動トルクとMGアシストトルクを算出する。
【0024】
前記モード選択部200は、車速VSPおよびアクセル開度APOと、図5に示すエンジン始動停止線マップと、を用いて、運転モード(HEVモード、EVモード)を演算する。エンジン始動線とエンジン停止線は、エンジン始動線(SOC高、SOC低)とエンジン停止線(SOC高、SOC低)の特性に代表されるように、バッテリSOCが低くなるにつれて、アクセル開度APOが小さくなる方向に低下する特性として設定されている。なお、エンジン始動は、EVモード状態で図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えた時点で、スリップ締結状態が実現可能なように第2クラッチ5の締結トルク容量をドライバー要求駆動トルク相当に制御する。そして、第2クラッチ5がスリップ開始したとの判断後に第1クラッチ4の締結を開始してエンジン回転を上昇させる。エンジン回転が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、モータ回転数とエンジン回転数が近くなった時点で第1クラッチ4を完全に締結する。その後、第2クラッチ5をロックアップさせてHEVモードに遷移させる処理により行われる。
【0025】
前記目標発電出力演算部300は、図6に示す走行中発電要求出力マップを用いて、バッテリSOCから目標発電出力を演算する。また、現在の動作点から図7で示す最良燃費線までエンジントルクを上げるために必要な出力を演算し、前記目標発電出力と比較して少ない出力を要求出力として、エンジン出力に加算する。
【0026】
前記動作点指令部400では、アクセル開度APOと目標定常トルク,MGアシストトルクと目標モードと車速VSPと要求発電出力とを入力する。そして、これらの入力情報を動作点到達目標として、過渡的な目標エンジントルクと目標MGトルクと目標CL2トルク容量と目標変速比とCL1ソレノイド電流指令を演算する。
【0027】
前記変速制御部500は、目標CL2トルク容量と目標変速比とから、これらを達成するように自動変速機3内のソレノイドバルブを駆動制御する。図8に変速制御で用いられる変速線マップの一例を示す。変速制御は、車速VSPとアクセル開度APOによる運転点と変速線マップに基づいて、現在のギヤ段から次ギヤ段をどのギヤ段にするかを判定する。そして、運転点が変速線マップのアップ変速線(図8の実線)またはダウン変速線(図8の点線)を横切るとアップ変速要求またはダウン変速要求を出し、変速要求に対応する自動変速機3の摩擦締結要素を締結/開放制御して変速させる。
【0028】
図9は、実施例1の統合コントローラ20に有する入力軸回転数F/B制御による目標MGトルクと目標CL2トルク容量の演算による第2クラッチ動作制御処理の構成を示す(クラッチ動作制御手段)。以下、図9に基づいて第2クラッチ動作制御構成を説明する。
【0029】
前記第2クラッチ5の動作制御構成は、図9に示すように、目標駆動トルク演算部100と、駆動トルク配分演算部401と、基本目標CL2トルク容量演算部402と、目標MGトルク演算部403(目標入力軸トルク補正手段)と、目標CL2トルク容量演算部404(目標トルク容量補正手段)と、を備えている。
【0030】
前記第2クラッチ5は、目標MGトルクTM*と目標CL2トルクTCL2*を入力し、これらの目標値に応じた制御指令にしたがって動作することで、実入力軸回転数ωCL2iを出力する。
【0031】
前記目標駆動トルク演算部100は、アクセル開度APOと車速VSPを入力し、目標駆動トルクマップ検索により、アクセル開度APOと車速VSPに適合する目標駆動トルクTd*を演算する。
【0032】
前記駆動トルク配分演算部401は、目標駆動トルク演算部100から目標駆動トルクTd*を入力し、選択される運転モード等に応じたトルク配分比に基づき、基本目標エンジントルクTE_base*と基本目標MGトルクTM_base*を演算する。
【0033】
前記基本目標CL2トルク容量演算部402は、目標駆動トルク演算部100から目標駆動トルクTd*を入力し、目標駆動トルクTd*に応じた基本目標CL2トルク容量TCL2_base*を演算する。
【0034】
前記目標MGトルク演算部403は、第2クラッチ5の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチ5への入力軸トルクである目標MGトルクTM*を増大補正する入力軸回転数F/B制御を実施する。この目標MGトルク演算部403は、加減算器40と、比例積分制御部41と、加算器42と、を有する。
前記加減算器40は、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの入力軸回転数偏差(ωCL2i*−ωCL2i)を演算する。ここで、目標入力軸回転数ωCL2i*は、図外の目標入力軸回転数演算部において、CL2スリップ制御での目標スリップ量と出力軸回転数を加算する式により求められる。
前記比例積分制御部41は、加減算器40から入力軸回転数偏差(ωCL2i*−ωCL2i)を入力し、枠内に記載の比例積分制御式(=PI制御式)を用いたF/B演算により、目標MGトルクF/B増大補正値TM_FB*を演算する。なお、PI制御式において、「KαM」はモータ調整用ゲイン、「KPM」はモータ制御用比例ゲイン、「KIM」はモータ制御用積分ゲインである。
前記加算器42は、比例積分制御部41からの目標MGトルクF/B増大補正値TM_FB*と、駆動トルク配分演算部401からの基本目標MGトルクTM_base*と、を加算することで、目標MGトルクTM*を演算する。
【0035】
前記目標CL2トルク容量演算部404は、第2クラッチ5の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチ5の目標トルク容量である目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。この目標CL2トルク容量演算部404は、加減算器40と、比例制御部43と、位相補償部44と、加減算器45と、第1F/B制御切替器46と、第2F/B制御切替器47と、を有する。
前記比例制御部43は、2つのF/B制御切替器46,47が入り側の演算条件成立時、加減算器40から入力軸回転数偏差(ωCL2i*−ωCL2i)を入力し、枠内に記載の比例制御式(=P制御式)を用いたF/B演算により、目標CL2トルク容量F/B値TCL2_FB*を演算する。なお、P制御式において、「KαCL2」は第2クラッチ調整用ゲイン、「KPCL2」は第2クラッチ制御用比例ゲインである。
前記位相補償部44は、基本目標CL2トルク容量演算部402からの基本目標CL2トルク容量TCL2_base*を入力し、位相補償フィルタGFF(S)を用いて目標CL2トルク容量F/F値TCL2_FF*を演算する。
前記加減算器45は、位相補償部44から入力された目標CL2トルク容量F/F値TCL2_FF*から、比例制御部43から入力された目標CL2トルク容量F/B値TCL2_FB*を減算することにより目標CL2トルク容量TCL2*を演算する。
前記第1F/B制御切替器46は、第2クラッチ5がスリップ制御中であることを示すCL2スリップフラグ=1であるとき、切替位置を入り側とする。
前記第2F/B制御切替器47は、目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、切替位置を切り側とし、目標駆動トルクTd*がクリープトルクを超える領域のとき、切替位置を入り側とする。
【0036】
図10は、実施例1の統合コントローラ20にて実行される第2クラッチ動作制御処理の流れを示す。以下、図10の各ステップについて説明する。なお、このフローチャートは、所定の制御周期毎に実行される。
【0037】
ステップS1では、発進クラッチである第2クラッチ5がスリップ制御中であるか否かを判断する。YES(スリップ制御中)の場合はステップS2へ進み、NO(非スリップ制御中)の場合はステップS4へ進む。
【0038】
ステップS2では、ステップS1でのスリップ制御中であるとの判断に続き、目標駆動トルクTd*が、クリープトルクを超えているか否かを判断する。YES(目標駆動トルク>クリープトルク)の場合はステップS3へ進み、NO(目標駆動トルク≦クリープトルク)の場合はステップS4へ進む。
【0039】
ステップS3では、ステップS2での目標駆動トルク>クリープトルクであるとの判断に続き、目標CL2トルク容量演算部404において、発進クラッチである第2クラッチ5の締結トルクによる入力軸回転数F/B制御を実施し、ステップS4へ進む。
【0040】
ステップS4では、ステップS1での非スリップ制御中であるとの判断、あるいは、ステップS2での目標駆動トルク≦クリープトルクであるとの判断、あるいは、ステップS3での締結トルクによる入力軸回転数F/B制御の実施に続き、目標MGトルク演算部403において、入力軸トルク(エンジン、MG)による入力軸回転数F/B制御を実施し、エンドへ進む。
【0041】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における作用を、「発進域におけるCL2トルク容量制御作用」、「発進域におけるMGトルク制御作用」に分けて説明する。
【0042】
[比較例の課題]
まず、走行用駆動源に電動モータのみを有する電気自動車や燃料電池車の場合、エンジンと異なり電動モータは、制御目標を目標回転数とする回転数制御と、制御目標を目標トルクとするトルク制御を行える自由度があり、低回転で高トルクの出力が可能である。このため、駆動系に発進クラッチを設けなくても、停車時にモータ回転数を停止しておき、発進に伴ってモータ回転数を上げてゆくことで対応できる。
【0043】
また、走行用駆動源にエンジンのみを有するエンジン車の場合、電動モータと異なりエンジンは、例えば、低回転数であるほど低トルクというように、回転数とトルクとの間に一定の関係があり、制御自由度が低い。このため、駆動系に変速機を設けなければならないばかりでなく、アクセル足離し操作による停車時にエンジンがアイドル回転数相当で回転しているため、停車時に切り離しにより回転差を吸収する発進クラッチが必要である。そして、一般的なAT車の場合、エンジンの下流にトルクコンバータ付き自動変速機を搭載することで、流体継手であるトルクコンバータが、発進クラッチ機能とクリープトルク確保機能を担っている。
【0044】
一方、走行用駆動源にエンジンと電動モータを有するハイブリッド車両の場合、モータアシストタイプ駆動系を持つ車両は、常にエンジンと電動モータが一体に回転する。パラレルタイプ駆動系を持つ車両は、HEVモードの選択によりエンジンと電動モータが一体に回転する。したがって、停車時における走行用駆動源の回転数が、エンジンの拘束を受けてアイドル回転数により回転するため、走行用駆動源の下流位置には発進クラッチが必要であり、発進クラッチのスリップ締結制御により、クリープトルクを確保するようにしている。
【0045】
そこで、ハイブリッド車両において、発進クラッチのスリップ制御中、発進クラッチへの入力軸回転数が低下した時、発進クラッチの目標トルク容量を減少補正させ、発進クラッチのスリップ状態を維持させることを狙った制御を行うものを比較例とする。
【0046】
この比較例では、スリップ状態を確保する目標入力軸回転数に対し実入力軸回転数が低下したとき、入力軸回転数偏差を無くすように発進クラッチの目標トルク容量を減少補正する入力軸回転数F/B制御を実施する。この目標トルク容量を減少補正する制御により、駆動負荷が軽減され、入力軸回転数の上昇が促される。したがって、モータトルクを増加することができない状況であっても、発進クラッチのスリップ状態が維持される。
【0047】
しかし、この比較例にあっては、発進クラッチのばらつきによる容量過多のシーンでの入力軸回転数の低下等を想定し、目標駆動トルクの大きさにかかわらず、発進クラッチの目標トルク容量を減少補正する入力軸回転数F/B制御を必ず実施する。このため、目標駆動トルクが低目標駆動トルク域において本制御を実施する場合には、発進クラッチに容量過多のばらつきが無く、例えば、エンジントルク不足等を原因として入力軸回転数が低下した時にも、発進クラッチの締結トルク容量を下げてしまう。
【0048】
以下、目標駆動トルクと発進クラッチの目標締結トルク容量をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの比較例における作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、このブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数より実入力軸回転数が低下している。このため、入力軸回転数偏差に対する入力軸回転数F/B制御が実施され、図11の点線によるF/Bトルク量特性に示すように、入力軸回転数偏差に応じたF/Bトルク量が発生する。よって、発進クラッチ最終トルクは、図11の点線による発進クラッチ最終トルク特性に示すように、基本的に付与されるクリープトルクからF/Bトルク量を差し引いたものとなる。
【0049】
したがって、発進クラッチを介して駆動輪へ伝達される駆動トルクが小さくなり過ぎたり、発進クラッチのばらつきによっては、駆動輪へ伝達される駆動トルクが完全に無くなったりすることがある。この結果、例えば、平坦路発進時において、ブレーキ解除操作を行ったときに駆動輪への伝達駆動トルクが小さ過ぎて、車両が発進しないことがある。あるいは、登坂路発進時において、路面勾配負荷に比べて駆動輪への伝達駆動トルクが不足し、ブレーキ解除操作に伴い車両がずり下がったりする等、の課題が発生する。
【0050】
[発進域におけるCL2トルク容量制御作用]
上記課題を解決するには、第2クラッチ5(発進クラッチ)の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御に停止条件を加える必要がある。以下、これを反映する発進域におけるCL2トルク容量制御作用を説明する。
【0051】
第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のときには、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3で実施される第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が停止される。言い換えると、車両発進を意図してブレーキ解除操作を行う発進域においては、目標駆動トルクTd*がクリープトルク以下になるため、入力軸回転数F/B制御により減少補正される前の第2クラッチ5の目標CL2トルク容量TCL2*(=クリープトルク)が維持される。
【0052】
以下、目標駆動トルクTd*と第2クラッチ5の目標CL2トルク容量TCL2*をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、ブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。しかし、時刻t1から時刻t2までのブレーキ解除発進域では、目標駆動トルクTd*がクリープトルク以下であるため、入力軸回転数偏差(ωCL2i*−ωCL2i)に対して目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施が停止される。このため、図11の実線によるF/Bトルク量特性に示すように、F/Bトルク量(=TCL2_FB*)の発生が無い。よって、発進クラッチ最終トルク(=TCL2*)は、図11の実線による発進クラッチ最終トルク特性Aに示すように、基本的に付与されるクリープトルクが維持されたものとなる。
【0053】
したがって、比較例のように、発進クラッチを介して駆動輪へ伝達される駆動トルクが小さくなり過ぎたり、発進クラッチのばらつきによっては、駆動輪へ伝達される駆動トルクが完全に無くなったりすることが防止される。この結果、例えば、平坦路発進時においては、ブレーキ解除操作を行ったとき、タイヤ7,7への伝達駆動トルクにより車両のスムーズな発進が確保される。また、登坂路発進時においては、タイヤ7,7への伝達駆動トルクが路面勾配負荷に対抗するものとなり、ブレーキ解除操作を行っても登坂路停車が維持されるというように、ブレーキ解除操作に伴う車両のずり下がりが防止される。
【0054】
そして、発進駆動トルクの上昇を意図してアクセル踏み込み操作を行うことで目標駆動トルクTd*がクリープトルクを超えると、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3にて第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が実施される。
【0055】
以下、目標駆動トルクをアクセル開度APOに応じたトルクとし、スリップ制御しながらアクセル踏み込み操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t2にてアクセル踏み込み操作が開始されると、時刻t2では目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。しかし、時刻t2から時刻t3までのアクセル踏み込み発進域では、目標駆動トルクTd*がクリープトルクを超えるため、入力軸回転数偏差(ωCL2i*−ωCL2i)に対する入力軸回転数F/B制御が実施され、図11の実線によるF/Bトルク量特性Eに示すように、F/Bトルク量(=TCL2_FB*)が発生する。よって、発進クラッチ最終トルク(=目標CL2トルク容量TCL2*)は、図11の実線による発進クラッチ最終トルク特性に示すように、基本的に付与されるアクセル開度APOや車速VSPに応じた締結トルクC(=目標CL2トルク容量FF値TCL2_FF*)からF/Bトルク量(=目標CL2トルク容量FB値TCL2_FB*)を差し引いたものとなる。
【0056】
このように、目標駆動トルクTd*がクリープトルクを超えると目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の介入により、図11の矢印Dで示すハッチング領域のトルク分、走行用駆動源にとっての駆動負荷が低下する。このため、図11の実入力軸回転数特性Bに示すように、時刻t2には目標入力軸回転数ωCL2i*から乖離している第2クラッチ5の実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*へと収束を開始し、時刻t3にて目標入力軸回転数ωCL2i*まで上昇する。そして、時刻t3にて、実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*になると、入力軸回転数偏差(ωCL2i*−ωCL2i)が無くなる。つまり、実質的に目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の介入が無くなり、発進クラッチ最終トルク(=目標CL2トルク容量TCL2*)が減少補正前の発進クラッチ最終トルク(=目標CL2トルク容量FF値TCL2_FF*)まで復帰する。
【0057】
したがって、時刻t2〜時刻t3までの発進加速を意図するアクセル踏み込み発進域においては、実入力軸回転数ωCL2iの上昇により第2クラッチ5のスリップが維持されると共に、時刻t3以降は、目標トルク容量の復帰により、ドライバー要求に応える車両の発進性が確保される。
【0058】
上記のように、実施例1では、第2クラッチ5のスリップ制御中、目標駆動トルクTd*が所定値以下のとき、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止する構成を採用した。
この構成により、目標駆動トルクTd*が所定値以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が非介入となり、減少補正前の目標CL2トルク容量FF値TCL2_FF*が維持される。
したがって、クラッチスリップ制御中、目標駆動トルクTd*が所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクTd*が所定値以下のときにタイヤ7,7への駆動トルク伝達が確保される。
【0059】
上記のように、実施例1では、第2クラッチ5は、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチである。そして、第2クラッチ5のスリップ制御中、目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止する構成を採用した。
この構成により、目標駆動トルクTd*がクリープトルク以下か否かで、入力軸回転数F/B制御の停止により制御非介入になるか、入力軸回転数F/B制御の実施により制御介入になるかが切り分けられる。
したがって、クラッチスリップ制御中の発進時、アクセル踏み込み発進域での第2クラッチ5のスリップ締結を維持しつつ、ブレーキ解除発進域でのタイヤ7,7への駆動トルク伝達確保により、平坦路発進でのスムーズな発進が確保されるし、登坂路発進でのブレーキ解除操作に伴うずり下がりが防止される。
【0060】
[発進域におけるMGトルク制御作用]
上記のように、目標駆動トルクTd*がクリープトルク以下という条件で入力軸回転数F/B制御に停止させた場合、入力軸回転数F/B制御の停止に伴う影響を解消することが必要である。以下、これを反映する発進域におけるMGトルク制御作用を説明する。
【0061】
第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のときには、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS4→エンドへと進む流れが繰り返される。すなわち、ステップS3で実施されるべき第2クラッチ5の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御が停止されるが、第2クラッチ5への入力軸トルクである目標MGトルクTM*を増大補正する入力軸回転数F/B制御の実施は維持される。
【0062】
以下、目標駆動トルクTd*と第2クラッチ5の目標CL2トルク容量TCL2*をクリープトルクとし、スリップ制御しながらブレーキ解除操作を行って車両を発進させるときの実施例1におけるCL2トルク容量制御作用を、図11に基づき説明する。
まず、図11の時刻t1にてブレーキ解除操作が開始されると、ブレーキ解除操作の開始時刻t1からアクセル踏み込み操作が開始される時刻t2までのブレーキ解除発進域においては、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低下している。この時刻t1から時刻t2までのブレーキ解除発進域では、目標駆動トルクTd*の大きさにかかわらず、入力軸回転数偏差(ωCL2i*−ωCL2i)に対して目標MGトルクTM*を増大補正する入力軸回転数F/B制御が実施される。この目標MGトルクTM*の増大補正によって実入力軸回転数ωCL2iの低下が抑えられることで、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの乖離幅が小さく保たれ、アクセル踏み込み操作を開始する時刻t2において、第2クラッチ5のスリップ締結状態が確保される。
【0063】
例えば、第2クラッチ5(発進クラッチ)の目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御に停止条件を加えた場合において、時刻t1から時刻t2までの停止条件成立域において、他の入力軸回転数F/B制御を行わないとする。この場合、図11の1点鎖線による実入力時回転数特性Fに示すように、目標入力軸回転数ωCL2i*から徐々に離れるというように、実入力軸回転数ωCL2iの低下が時間の経過と共に進行し、実入力軸回転数ωCL2iが目標入力軸回転数ωCL2i*から大きく乖離する。
【0064】
これに対し、実施例1では、第2クラッチ5のスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標MGトルク演算部403による入力軸回転数F/B制御を実施する構成を採用した。
この構成により、目標駆動トルクTd*がクリープトルク以下のとき、第2クラッチ5への入力軸トルクが増大補正され、目標入力軸回転数ωCL2i*と実入力軸回転数ωCL2iの乖離幅が小さく保たれる。
したがって、目標CL2トルク容量演算部404による入力軸回転数F/B制御の実施を停止するブレーキ解除発進域において、目標MGトルク演算部403による入力軸回転数F/B制御を実施することにより、第2クラッチ5のスリップ締結状態が確保される。
【0065】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0066】
(1) 走行用駆動源に設けられ、少なくともアクセル開度APOにより決められる目標駆動トルクTd*を実現するエンジン1およびモータジェネレータ2(電動モータ)と、
前記モータジェネレータ2(電動モータ)とタイヤ7,7(駆動輪)の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数ωCL2i*とし、クラッチ締結トルクを目標トルク容量(目標CL2トルク容量TCL2*)とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行うクラッチ(第2クラッチ5)と、
前記クラッチ(第2クラッチ5)へのスリップ要求時、前記目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように前記クラッチ(第2クラッチ5)の目標トルク容量(目標CL2トルク容量TCL2*)を減少補正する入力軸回転数F/B制御を実施する目標トルク容量補正手段(目標CL2トルク容量演算部404)と、
前記クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*が所定値以下のとき、前記目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止するクラッチ動作制御手段(図9)と、
を備える。
このため、クラッチ(第2クラッチ5)のスリップ制御中、目標駆動トルクTd*が所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクTd*が所定値以下のときにタイヤ7,7(駆動輪)への駆動トルク伝達を確保することができる。
【0067】
(2) 前記クラッチは、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチ(第2クラッチ5)であり、
前記クラッチ動作制御手段(図9)は、前記発進クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*が、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、前記目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止する。
このため、(1)の効果に加え、クラッチスリップ制御中の発進時、アクセル踏み込み発進域での発進クラッチ(第2クラッチ5)のスリップ締結を維持しつつ、ブレーキ解除発進域での駆動輪(タイヤ7,7)への駆動トルク伝達確保により、平坦路発進でのスムーズな発進を確保することができるし、登坂路発進でのブレーキ解除操作に伴うずり下がりを防止することができる。
【0068】
(3) 前記発進クラッチ(第2クラッチ5)へのスリップ要求時、前記発進クラッチ(第2クラッチ5)の目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように前記発進クラッチ(第2クラッチ5)への目標MGトルクTM*(目標入力軸トルク)を増大補正する入力軸回転数F/B制御を実施する目標入力軸トルク補正手段(目標MGトルク演算部403)を備え、
前記クラッチ動作制御手段(図9)は、前記発進クラッチ(第2クラッチ5)のスリップ制御中、前記目標駆動トルクTd*がクリープトルク以下のとき、前記目標入力軸トルク補正手段(目標MGトルク演算部403)による入力軸回転数F/B制御を実施する。
このため、上記(2)の効果に加え、目標トルク容量補正手段(目標CL2トルク容量演算部404)による入力軸回転数F/B制御の実施を停止するブレーキ解除発進域において、目標入力軸トルク補正手段(目標MGトルク演算部403)による入力軸回転数F/B制御を実施することにより、発進クラッチ(第2クラッチ5)のスリップ締結状態を確保することができる。
【0069】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0070】
実施例1では、第2クラッチCL2を発進クラッチとする発進時に、入力軸回転数F/B制御を停止する例を示した。しかし、第2クラッチCL2をショック吸収クラッチとするエンジン始動時等において、入力軸回転数F/B制御を停止する場合に適用しても良い。この場合においても、クラッチスリップを維持しつつ、目標駆動トルクが所定値以下のとき、ドライバー要求による駆動輪への駆動トルク伝達を確保することができる。
【0071】
実施例1では、第2クラッチCL2を、有段式の自動変速機ATに内蔵した摩擦要素の中から選択する例を示した。しかし、自動変速機ATとは別に第2クラッチCL2を設けても良く、例えば、モータ/ジェネレータMGと変速機入力軸との間に自動変速機ATとは別に第2クラッチCL2を設ける例や、変速機出力軸と駆動輪の間に自動変速機ATとは別に第2クラッチCL2を設ける例も含まれる。
【0072】
実施例1では、HEVモードとEVモードを切り替えるモード切り替え手段として、第1クラッチ4を用いる例を示した。しかし、HEVモードとEVモードを切り替えるモード切り替え手段としては、例えば、プラネタリギア等のように、クラッチを用いることなくクラッチ機能を発揮するような差動装置や動力分割装置を用いる例としても良い。
【0073】
実施例1では、本発明の制御装置を、1モータ2クラッチによるパラレルタイプのハイブリッド車両に対し適用した例を示した。しかし、走行用駆動源に、互いに直結したエンジンとモータジェネレータを備えたモータアシストタイプのハイブリッド車両に対しても適用することができる。
【符号の説明】
【0074】
1 エンジン
2 モータジェネレータ(電動モータ)
3 自動変速機
4 第1クラッチ
5 第2クラッチ(クラッチ、発進クラッチ)
6 ディファレンシャルギア
7 タイヤ(駆動輪)
8 インバータ
9 バッテリ
10 エンジン回転センサ
11 MG回転センサ
12 AT入力回転センサ
13 AT出力回転センサ
14,15 ソレノイドバルブ
16 SOCセンサ
17 アクセル開度センサ
18 機械式オイルポンプ
19 電動サブオイルポンプ
20 統合コントローラ
21 エンジンコントローラ
22 モータコントローラ
23 ブレーキ油圧センサ
24 電動サブオイルポンプコントローラ
25 バッテリ電流/電圧センサ
100 目標駆動トルク演算部
401 駆動トルク配分演算部
402 基本目標CL2トルク容量演算部
403 目標MGトルク演算部(目標入力軸トルク補正手段)
404 目標CL2トルク容量演算部(目標トルク容量補正手段)
【特許請求の範囲】
【請求項1】
走行用駆動源に設けられ、少なくともアクセル開度により決められる目標駆動トルクを実現するエンジンおよび電動モータと、
前記電動モータと駆動輪の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数とし、クラッチ締結トルクを目標トルク容量とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行うクラッチと、
前記クラッチへのスリップ要求時、前記目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する目標トルク容量補正手段と、
前記クラッチのスリップ制御中、前記目標駆動トルクが所定値以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止するクラッチ動作制御手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記クラッチは、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチであり、
前記クラッチ動作制御手段は、前記発進クラッチのスリップ制御中、前記目標駆動トルクが、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止することを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項2に記載されたハイブリッド車両の制御装置において、
前記発進クラッチへのスリップ要求時、前記発進クラッチの目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記発進クラッチへの目標入力軸トルクを増大補正する入力軸回転数フィードバック制御を実施する目標入力軸トルク補正手段を備え、
前記クラッチ動作制御手段は、前記発進クラッチのスリップ制御中、前記目標駆動トルクがクリープトルク以下のとき、前記目標入力軸トルク補正手段による入力軸回転数フィードバック制御を実施することを特徴とするハイブリッド車両の制御装置。
【請求項1】
走行用駆動源に設けられ、少なくともアクセル開度により決められる目標駆動トルクを実現するエンジンおよび電動モータと、
前記電動モータと駆動輪の間に介装され、スリップ要求時、クラッチ入力軸回転数を目標入力軸回転数とし、クラッチ締結トルクを目標トルク容量とし、クラッチ滑りを維持しつつ締結トルク相当の駆動トルクを伝達するスリップ制御を行うクラッチと、
前記クラッチへのスリップ要求時、前記目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記クラッチの目標トルク容量を減少補正する入力軸回転数フィードバック制御を実施する目標トルク容量補正手段と、
前記クラッチのスリップ制御中、前記目標駆動トルクが所定値以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止するクラッチ動作制御手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記クラッチは、車両停止状態から発進を開始する発進域でスリップ要求がある発進クラッチであり、
前記クラッチ動作制御手段は、前記発進クラッチのスリップ制御中、前記目標駆動トルクが、アクセル足離し状態において発進に備えて発生させておくクリープトルク以下のとき、前記目標トルク容量補正手段による入力軸回転数フィードバック制御の実施を停止することを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項2に記載されたハイブリッド車両の制御装置において、
前記発進クラッチへのスリップ要求時、前記発進クラッチの目標入力軸回転数より実入力軸回転数が低いとき、入力軸回転数偏差を無くすように前記発進クラッチへの目標入力軸トルクを増大補正する入力軸回転数フィードバック制御を実施する目標入力軸トルク補正手段を備え、
前記クラッチ動作制御手段は、前記発進クラッチのスリップ制御中、前記目標駆動トルクがクリープトルク以下のとき、前記目標入力軸トルク補正手段による入力軸回転数フィードバック制御を実施することを特徴とするハイブリッド車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−153154(P2012−153154A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11009(P2011−11009)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]