
ハイブリッド車両の制御装置
【課題】エンジン始動時のトルク抜けショックの影響を防止しつつ、エンジン始動完了までの時間を短縮すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータ2と、HEVモードとEVモードを切り替える第1クラッチ4と、モード遷移時にスリップ締結される第2クラッチ5と、エンジン始動制御手段(図10)と、を備える。エンジン始動制御手段(図10)は、エンジン始動要求時の第2クラッチ5の締結トルクである始動要求時トルクが、第2クラッチ5のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、モード遷移時の第2クラッチ5の締結トルクであるモード遷移時トルクを小さい値に設定する。
【解決手段】ハイブリッド車両の制御装置は、エンジン1と、モータ2と、HEVモードとEVモードを切り替える第1クラッチ4と、モード遷移時にスリップ締結される第2クラッチ5と、エンジン始動制御手段(図10)と、を備える。エンジン始動制御手段(図10)は、エンジン始動要求時の第2クラッチ5の締結トルクである始動要求時トルクが、第2クラッチ5のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、モード遷移時の第2クラッチ5の締結トルクであるモード遷移時トルクを小さい値に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン始動要求に基づいて、電気自動車モードからハイブリッド車モードへとモード遷移するとき、モータと駆動輪の間の摩擦要素をスリップ締結するハイブリッド車両の制御装置に関するものである。
【背景技術】
【0002】
従来、電気自動車モードからハイブリッド車モードへのモード遷移の際、モータと駆動輪の間に介装された第2クラッチの締結トルクを低減してスリップさせた後、エンジンとモータの間に介装された第1クラッチを締結してエンジン始動するハイブリッド車両の制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007-131071号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来装置にあっては、第2クラッチをスリップさせる際、第2クラッチの締結トルクの低減しすぎによるトルク抜けショックの発生を防止するため、第2クラッチにおける締結トルクの低減量を制限していた。そのため、エンジン始動要求から第2クラッチのスリップまでに時間がかかり、エンジン始動完了までの時間が長くなってしまう、という問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、エンジン始動時のトルク抜けショックの影響を抑制しつつ、エンジン始動完了までの時間を短縮することができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明のハイブリッド車両の制御装置は、エンジンと、モータと、モード切替手段と、摩擦要素と、エンジン始動制御手段と、を備える。
前記モード切替手段は、エンジンとモータを駆動源とするハイブリッド車モードと、モータを駆動源とする電気自動車モードと、を切り替える。前記摩擦要素は、エンジン始動要求に基づくハイブリッド車モードから電気自動車モードへのモード遷移時、スリップ締結される。
前記エンジン始動制御手段は、エンジン始動要求時の摩擦要素の締結トルクである始動要求時トルクが、摩擦要素のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクよりも大きいときに比べて、モード遷移時の摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定する。
【発明の効果】
【0007】
よって、始動要求時トルクがショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクより大きいときに比べて、モード遷移時トルクを小さい値に設定してエンジン始動制御を実施する。
したがって、始動要求時トルクがショック非発生トルク以下では、モード遷移時トルクを小さくすることで摩擦要素は早急にスリップする。一方、エンジン始動要求時の摩擦要素の締結トルクは、摩擦要素のトルク抜けによるショック非発生トルク以下であるため、摩擦要素が早急にスリップしてもトルク抜けショックの影響は小さい。
そのため、トルク抜けショックの影響が小さいシーンに限って、摩擦要素のスリップ開始までの時間を短縮することができ、この結果、トルク抜けショックの影響を抑制しつつ、エンジン始動完了までの時間を短縮することができる。
【図面の簡単な説明】
【0008】
【図1】実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。
【図2】実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。
【図3】実施例1の統合コントローラを示す演算ブロック図である。
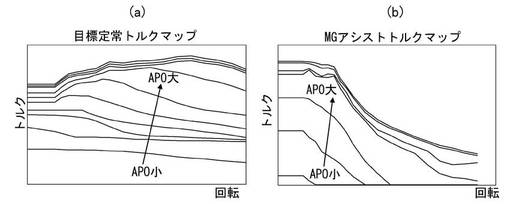
【図4】実施例1の制御装置で用いられる目標定常トルクマップ(a)とMGアシストトルクマップ(b)を示すマップ図である。
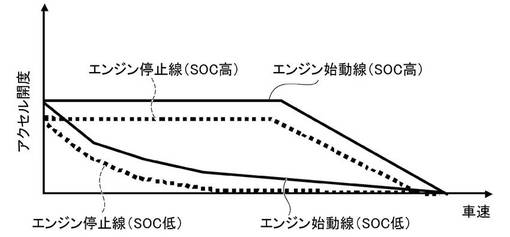
【図5】実施例1の制御装置で用いられるエンジン始動停止線マップを示すマップ図である。
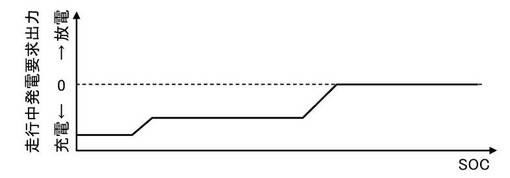
【図6】実施例1の制御装置で用いられるバッテリSOCに対する走行中発電要求出力マップを示すマップ図である。
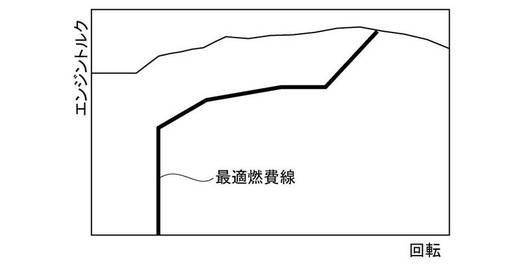
【図7】実施例1の制御装置で用いられるエンジンの最適燃費線を示す特性図である。
【図8】実施例1の自動変速機における変速線の一例を示す変速マップ図である。
【図9】ハイブリッド車両での運転モード遷移の一例を示す説明図である。
【図10】実施例1の統合コントローラにて実行されるエンジン始動制御処理の構成と流れを示すフローチャートである。
【図11】ハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。
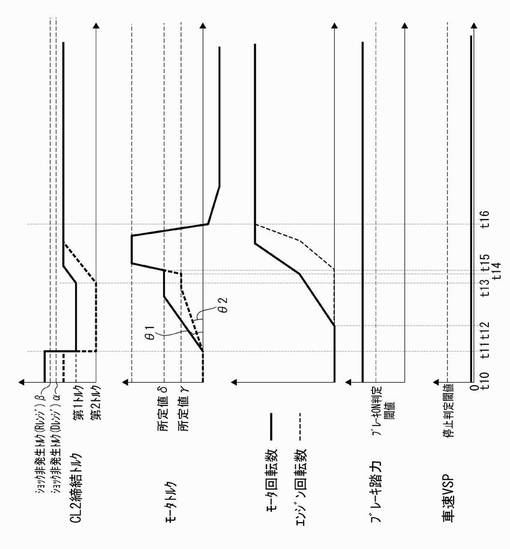
【図12】実施例1の制御装置を搭載したハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0010】
まず、構成を説明する。
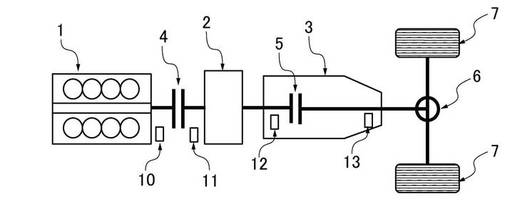
図1は、実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。以下、図1に基づき、パワートレイン構成を説明する。
【0011】
実施例1のハイブリッド車両のパワートレイン系には、図1に示すように、エンジン1と、モータジェネレータ2(モータ;以下、「MG」と記載する。)と、自動変速機3(以下、「AT」と記載する。)と、第1クラッチ4(モード切替手段;以下、「CL1」と記載する。)と、第2クラッチ5(摩擦要素;以下、「CL2」と記載する。)と、ディファレンシャルギア6と、タイヤ7,7(駆動輪)と、を備えている。つまり、エンジン1と1モータ・2クラッチをパワートレイン系に備えた構成としている。
【0012】
前記エンジン1は、エンジン出力軸とモータジェネレータ2のモータ入力軸とが、トルク容量可変の第1クラッチ4を介して連結される。前記モータジェネレータ2は、モータ出力軸と自動変速機3の変速機入力軸とが、直接連結される。前記自動変速機3は、複数の摩擦要素を有する有段変速機であり、変速機出力軸にディファレンシャルギア6を介して駆動輪であるタイヤ7,7が連結される。
【0013】
前記第2クラッチ5は、自動変速機3の変速段に応じて異なる変速機内の動力伝達を担っているトルク容量可変のクラッチ・ブレーキによる複数の摩擦要素のうち、1つの摩擦要素を選択して用いている。これにより自動変速機3は、第1クラッチ4を介して入力されるエンジン1の動力と、モータジェネレータ2から入力される動力と、を合成してタイヤ7,7へ出力する。
【0014】
前記第1クラッチ4としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる乾式単板クラッチや乾式多板クラッチ等を用いればよい。前記第2クラッチ5としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチや湿式多板ブレーキ等を用いればよい。
【0015】
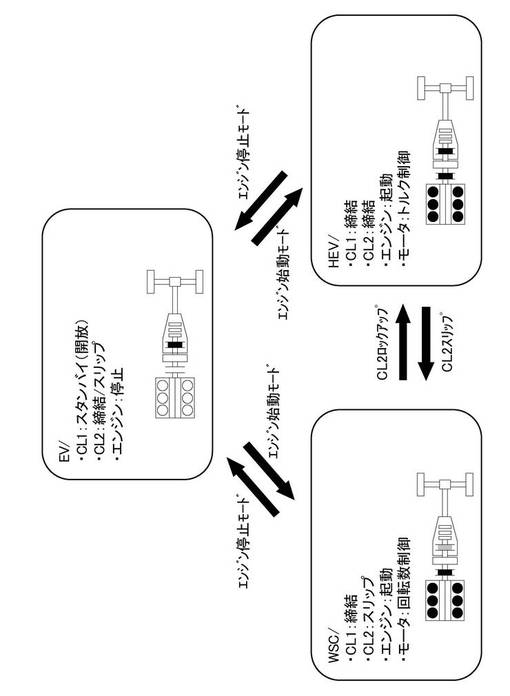
このパワートレイン系には、第1クラッチ4の接続状態に応じて2つの運転モードを有する。第1クラッチ4を切断したCL1開放状態では、モータジェネレータ2の動力のみで走行する電気自動車モード(以下、「EVモード」という)となる。このEVモードは、要求駆動トルクが低く、バッテリSOCが確保されているときに選択される。一方、第1クラッチ4を接続したCL1締結状態では、エンジン1とモータジェネレータ2の動力で走行するハイブリッド車モード(以下、「HEVモード」という)となる。このHEVモードは、要求駆動トルクが高いときやバッテリSOCが不足するようなときに選択される。そして、EVモード時にエンジン始動要求が発生すると、EVモードから「エンジン始動モード」→「WSCモード(駆動トルクコントロールモード)」といったモード遷移状態を経てHEVモードへと移行する(図9参照)。
【0016】
さらに、前記パワートレインには、エンジン1の回転数を検出するエンジン回転センサ10と、モータジェネレータ2の回転数を検出するMG回転センサ11と、自動変速機3の入力軸回転数を検出するAT入力回転センサ12と、自動変速機3の出力軸回転数を検出するAT出力回転センサ13と、が設けられる。
【0017】
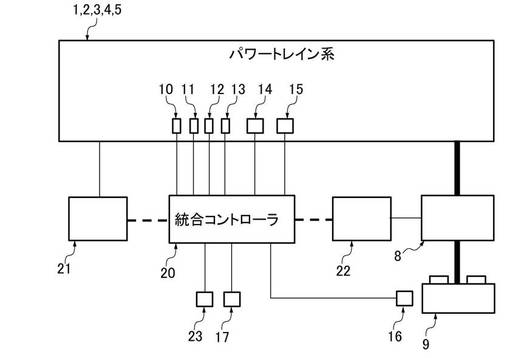
図2は、実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。以下、図2に基づいて、制御システム構成を説明する。
【0018】
実施例1の制御システムは、図2に示すように、統合コントローラ20と、エンジンコントローラ21と、モータコントローラ22と、インバータ8と、バッテリ9と、ソレノイドバルブ14と、ソレノイドバルブ15と、アクセル開度センサ17と、ブレーキ油圧センサ23と、SOCセンサ16と、を備えている。
【0019】
前記統合コントローラ20は、パワートレイン系の動作点を統合制御する。この統合コントローラ20では、アクセル開度APOと、バッテリSOCと、車速VSP(AT出力回転センサ13により検出される自動変速機出力軸回転数に比例する)と、に応じて、運転者が望む駆動力を実現できる運転モードを選択する。そして、選択した運転モードに応じ、モータコントローラ22に対し目標MGトルクもしくは目標MG回転数を指令し、エンジンコントローラ21に対し目標エンジントルクを指令し、ソレノイドバルブ14,15に対し駆動信号を指令する。
【0020】
前記エンジンコントローラ21は、エンジン1を制御する。前記モータコントローラ22は、モータジェネレータ2を制御する。前記インバータ8は、モータジェネレータ2を駆動する。前記バッテリ9は、電気エネルギーを蓄える。前記ソレノイドバルブ14は、第1クラッチ4の油圧を制御する。前記ソレノイドバルブ15は、第2クラッチ5の油圧を制御する。前記アクセル開度センサ17は、アクセル開度(APO)を検出する。前記ブレーキ油圧センサ23は、ブレーキ油圧(BPS)を検出する。なお、ブレーキ踏力は、このブレーキ油圧センサ23により検出されるブレーキ油圧BPSに比例する。前記SOCセンサ16は、バッテリ9の充電容量状態であるバッテリSOCを検出する。
【0021】
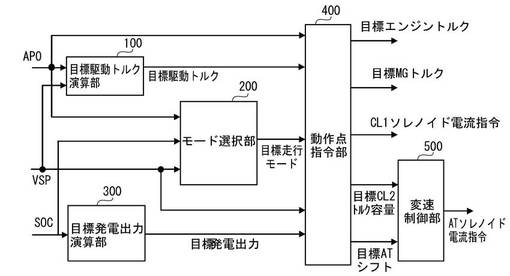
図3は、実施例1の統合コントローラを示す演算ブロック図である。以下、図3に基づいて、統合コントローラ20の構成を説明する。
【0022】
前記統合コントローラ20は、図3に示すように、目標駆動トルク演算部100と、モード選択部200と、目標発電出力演算部300と、動作点指令部400と、変速制御部500と、を備えている。
【0023】
前記目標駆動トルク演算部100は、図4(a)に示す目標定常トルクマップと、図4(b)に示すMGアシストトルクマップを用いて、アクセル開度APOと車速VSPから、目標駆動トルクである目標定常トルクとMGアシストトルクを算出する。
【0024】
前記モード選択部200は、車速VSPおよびアクセル開度APOと、図5に示すエンジン始動停止線マップと、バッテリSOCと、を用いて、最適な運転モード(HEVモード、EVモード)を検索し、検索した運転モードを目標走行モードして選択する。エンジン始動停止線マップにおいて、エンジン始動線とエンジン停止線は、エンジン始動線(SOC高、SOC低)とエンジン停止線(SOC高、SOC低)の特性に代表されるように、バッテリSOCが低くなるにつれて、アクセル開度APOが小さくなる方向に低下する特性として設定されている。なお、エンジン始動要求は、EVモード状態で図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えた時点で発生するほか、バッテリSOCが下限閾値を下回ったときに発生する。
【0025】
前記目標発電出力演算部300は、図6に示す走行中発電要求出力マップを用いて、バッテリSOCから目標発電出力を演算する。また、現在の動作点から図7で示す最適燃費線までエンジントルクを上げるために必要な出力を演算し、前記目標発電出力と比較して少ない出力を要求出力として、エンジン出力に加算する。
【0026】
前記動作点指令部400では、アクセル開度APOと目標駆動トルク(目標定常トルク,MGアシストトルク)と目標走行モードと車速VSPと目標発電出力とを入力する。そして、これらの入力情報を動作点到達目標として、過渡的な目標エンジントルクと目標MGトルクと目標CL2トルク容量と目標ATシフトとCL1ソレノイド電流指令を演算する。
【0027】
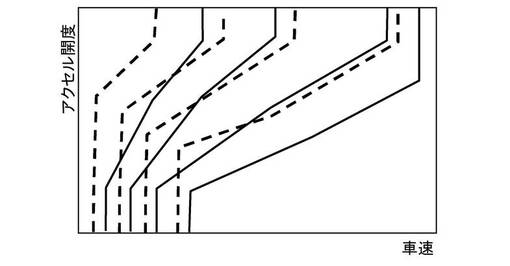
前記変速制御部500は、目標CL2トルク容量と目標ATシフトとから、これらを達成するように自動変速機3内のソレノイドバルブを駆動制御するATソレノイド電流指令を演算する。図8には、変速制御で用いられる変速線マップの一例を示す。変速制御は、車速VSPとアクセル開度APOによる運転点と変速線マップに基づいて、現在のギヤ段から次ギヤ段をどのギヤ段にするかを判定する。そして、運転点が変速線マップのアップ変速線(図8の実線)またはダウン変速線(図8の点線)を横切るとアップ変速要求またはダウン変速要求を出し、変速要求に対応する自動変速機3の摩擦要素を締結/開放制御して変速させる。なお、実施例1では、変速時に自動変速機3の入力側に有するモータジェネレータ2による回転数制御を加えることで、油圧制御だけによる変速制御の場合に比べ、イナーシャフェーズ領域でのギヤ比変化を滑らかにする変速制御を行うようにしている。
【0028】
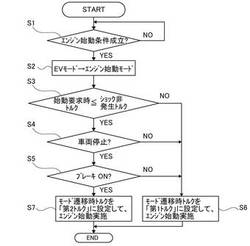
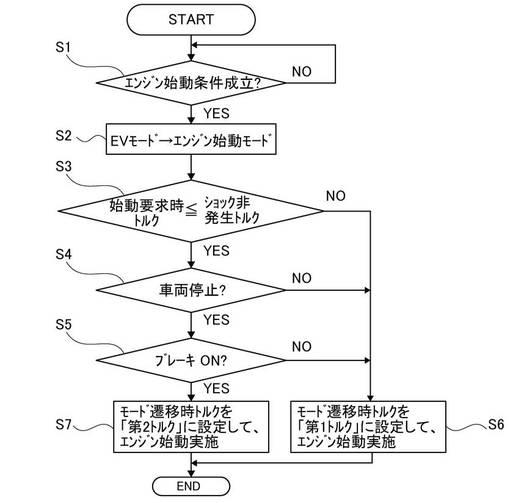
図10は、実施例1の統合コントローラにて実行されるエンジン始動制御処理(エンジン始動制御手段)の構成と流れを示すフローチャートである。以下、図10の各ステップについて説明する。
【0029】
ステップS1では、EVモード時にエンジン始動条件が成立したか否かを判断する。YES(条件成立)の場合はステップS2へ進み、NO(条件不成立)の場合はステップS1を繰り返す。
ここで、エンジン始動条件の成立とは、エンジン始動要求が生じることである。図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えるか、バッテリSOCが下限閾値を下回ったときにエンジン始動条件が成立した(エンジン始動要求が生じた)と判断する。
【0030】
ステップS2では、ステップS1でのエンジン始動条件成立との判断に続き、運転モードをEVモードからモード遷移状態であるエンジン始動モードへと移行し、ステップS3に進む。
【0031】
ステップS3では、ステップS2でのエンジン始動モードへの移行に続き、エンジン始動条件成立時(エンジン始動要求時)の第2クラッチ5における締結トルクである「始動要求時トルク」が、「ショック非発生トルク」以下であるか否かを判断する。YES(始動要求時トルク≦ショック非発生トルク)の場合にはステップS4へ進み、NO(始動要求時トルク>ショック非発生トルク)の場合にはステップS6へ進む。
ここで、第2クラッチ5における締結トルクが一定値以上のあるところから低減しすぎると、第2クラッチ5での伝達トルク容量が下がりすぎてトルク抜けによるショックが発生してしまう。なお、「トルク抜け」とは、第2クラッチ5の伝達トルク容量の低下により、駆動源から駆動輪に伝達する駆動トルクの少なくとも一部が第2クラッチ5で遮断され、車両の駆動トルクが急激に低下することをいう。
これに対し、「ショック非発生トルク」とは、第2クラッチ5の締結トルクをゼロNm相当まで低減してもトルク抜けの影響が低い(トルク抜けによる車両のショックがほとんど発生しない、あるいは、ショックが発生しても許容されるレベル)と判断できる締結トルク値である。この「ショック非発生トルク」は、エンジン始動要求時の走行レンジに応じてあらかじめ任意の値に設定する。例えば、エンジン始動要求時にドライブレンジ(Dレンジ)の場合には「ショック非発生トルク」を所定値αに設定し、エンジン始動要求時にリバースレンジ(Rレンジ)の場合には「ショック非発生トルク」を所定値β(>α)に設定する。
ここで、トルク抜けによるショックの大きさは、第2クラッチ5の伝達トルク容量を低下させる際の条件によって変化する。具体的には、伝達トルク容量を低下させる前と後との変化幅の大きさ、伝達トルク容量を低下させる際の変化率、第2クラッチ5を作動させるための作動液の温度等によって変化する。そのため、「ショック非発生トルク」は、実験等により予め求めておくことが好ましい。
【0032】
ステップS4では、ステップS3での始動要求時トルク≦ショック非発生トルクとの判断に続き、車両が停止しているか否かを判断する。YES(車両停止)の場合にはステップS5へ進み、NO(車両走行)の場合にはステップS6へ進む。
ここで、車両が停止しているか否かは、AT出力回転センサ13により検出される自動変速機出力軸回転数に比例して求められる車速VSPが停止判定閾値(≒ゼロ)未満であるか否かによって判断する。車速VSPが停止判定閾値未満であれば、車両停止と判断する。
【0033】
ステップS5では、ステップS4での車両停止との判断に続き、ブレーキがON操作されているか否かを判断する。YES(ブレーキON)の場合にはステップS7へ進み、NO(ブレーキOFF)の場合にはステップS6へ進む。
ここで、ブレーキがON操作されているか否かは、ブレーキ油圧センサ23により検出されるブレーキ油圧(BPS)に比例して求められるブレーキ踏力がブレーキON判定閾値以上であるか否かによって判断する。ブレーキ踏力がブレーキON判定閾値以上であれば、ブレーキがON操作されていると判断する。
【0034】
ステップS6では、ステップS3での始動要求時トルク>ショック非発生トルクとの判断、ステップS4での車両走行との判断、ステップS5でのブレーキOFF操作との判断、のいずれかに続き、「モード遷移時トルク」を「第1トルク」に設定して、エンジン始動制御を実施し、エンドへ進む。
ここで、エンジン始動制御は、まず、第2クラッチ5をスリップ締結させるために、第2クラッチ5における締結トルクを低減する。そして、第2クラッチ5がスリップしたと判断すると、第1クラッチ4を半締結状態にし、モータジェネレータ2をスタータモータとして、モータトルクを上昇させることでエンジン1をクランキングする。これによりエンジン回転数は上昇を始める。一方、第2クラッチ5の締結トルクは、第2クラッチ5がスリップした後、車両状態や運転者操作状態に応じて決まる要求駆動トルクとなるようにコントロールされる。そして、エンジン回転数が初爆可能な回転数に達成したら燃料供給や点火によりエンジン1を燃焼作動させ、モータ回転数とエンジン回転数が近くなった時点で第1クラッチ4を完全に締結する。これにより、エンジン始動モードからWSCモードへ移行し、エンジン始動制御は完了する。さらにその後、第2クラッチ5をロックアップさせてHEVモードに移行することで、モード遷移が終了する。
そして、このステップS6では、エンジン始動制御中、第2クラッチ5をスリップ締結させる際の第2クラッチ5における締結トルクである「モード遷移時トルク」を、「第1トルク」まで低減する。この「第1トルク」とは、第2クラッチ5を締結トルクがゼロNm相当となるまで開放せず、トルク抜けショックが生じない所定の中間圧であり、車両状態や運転者操作状態に応じて決まる要求駆動トルクよりわずかに低い値である。これにより、「モード遷移時トルク」が「第1トルク」よりも小さい値にならないようにトルク低減量が制限され、第2クラッチ5での伝達トルク容量が確保される。
【0035】
ステップS7では、ステップS5でのブレーキONとの判断に続き、「モード遷移時トルク」を「第2トルク」に設定して、エンジン始動制御を実施し、エンドへ進む。
ここで、エンジン始動制御については、上記ステップS6と同様である。
一方、このステップS7では、エンジン始動中、第2クラッチ5をスリップ締結させるために、「モード遷移時トルク」を、「第2トルク」まで低減する。この「第2トルク」とは、ステップS6において設定した「第1トルク」よりも小さい値であり、ここでは締結トルクがほぼゼロNm相当となる値である。すなわち、始動要求時トルクがショック非発生トルク以下のときでは、「モード遷移時トルク」におけるトルク低減量は大きくなる。
【0036】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における「エンジン始動制御作用」を、(1)始動要求時トルクがショック非発生トルクより大きいとき、 (2)始動要求時トルクがショック非発生トルク以下のとき、に分けて説明する。
【0037】
[比較例の課題]
図11は、ハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。図中、実線で実施例1のハイブリッド制御装置の適用時の状態を示し、破線で比較例1の状態を示す。
【0038】
エンジン始動要求に基づくEVモードからHEVモードへのモード遷移時、第2クラッチをスリップさせるための第2クラッチにおける締結トルクの低減量を制限し、第2クラッチでのトルク抜けによるショックが発生しないようにするものを比較例1とする。つまり、この比較例1では、モード遷移時の第2クラッチ締結トルク(以下、「モード遷移時トルク」という)をトルク抜けショックが生じない所定の中間圧である「第1トルク」に設定する。
【0039】
この比較例1の場合、エンジン始動要求時の第2クラッチ締結トルク(以下、「始動要求時トルク」という)に対して、モード遷移時の締結トルク低減量を制限しているために、第2クラッチが開放しすぎず、トルク抜けショックの発生が防止される。すなわち、モード遷移時のトルク抜けショックは、始動要求時トルクとモード遷移時トルクとのトルク差によって生じるものである。ここで、モード遷移時の締結トルク低減量を制限することで、始動要求時トルクとモード遷移時トルクとのトルク差が広がらず、ショックの発生を抑制することとなる。
【0040】
しかしながら、例えば図11において破線で示すように、車両停止中にバッテリSOCが不足してエンジン始動要求が発生した場合等のように、始動要求時トルクが元々低い場合には、モード遷移時トルクに拘らずトルク差が広がることはない。つまり、第2クラッチでのトルク抜けによるショックを考慮する必要はない。
【0041】
これに対し、比較例1では締結トルク低減量を制限してモード遷移時トルクを「第1トルク」に設定してしまうために、始動要求時トルクが元々低い場合であってもモード遷移時トルクを小さな値に設定することができない。そのため、第2クラッチがスリップするまでの時間が増長し(図11では、時刻t1〜時刻t2)、エンジン始動完了までの時間(図11では、時刻t3時点でエンジン始動完了)が長くなってしまっていた。
【0042】
一方、EVモードからHEVモードへのモード遷移時、第2クラッチをスリップさせるための第2クラッチにおける締結トルクの低減量を制限せず、ゼロNm相当まで低減するものを比較例2とする。
【0043】
この比較例2の場合、始動要求時トルクの大きさに拘らず、モード遷移時トルクをゼロNm相当まで低減してしまう。そのため、第2クラッチは早急にスリップすることとなる。しかしながら、始動要求時トルクが大きい場合には、モード遷移時トルクとのトルク差が広がってしまい、大きなトルク抜けショックが発生してしまう。
【0044】
このように、比較例1の場合ではモード遷移時のトルク低減量を制限することで、トルク抜けショックを考慮しなくてもいい場合にエンジン始動時間がかかってしまう、という課題が生じる。また、比較例2の場合ではモード遷移時のトルク低減量を制限しないことで、始動要求時トルクが大きい場合に、大きなトルク抜けショックが発生してしまう、という課題が生じる。このように抜けショックの影響抑制と、エンジン始動時間の短縮といった2つの要求性能を同時に満足するには至らなく、逆に、2つの課題を同時に露呈させてしまう結果になる。
【0045】
[エンジン始動制御作用]
(1) 始動要求時トルクがショック非発生トルクより大きいとき
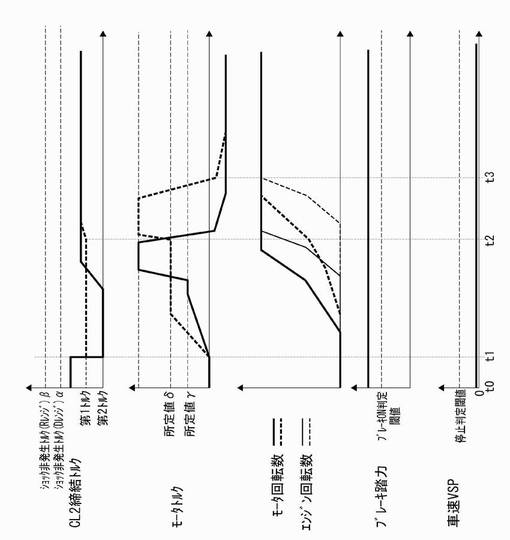
図12は、実施例1の制御装置を搭載したハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。図中、実線で始動要求時トルクがショック非発生トルクより大きいときを示し、破線で始動要求時トルクがショック非発生トルクより小さいときを示す。
【0046】
図12に示す時刻t10時点において、ハイブリッド車両は、エンジン1が停止したEVモード中の車両停止状態であって、第2クラッチ5における伝達駆動トルクが比較的高い状態である。すなわち、時刻t10時点での第2クラッチ締結トルクは、ショック非発生トルクよりも高い値となっている。
【0047】
そのため、バッテリSOC不足等により時刻t11においてエンジン始動要求が発生すると、このときの第2クラッチ5の締結トルクである始動要求時トルクは、ショック非発生トルク(ここでは、所定値α及びβ)よりも大きい値となる。
【0048】
すなわち、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3へと進み、ステップS6へと進む。これにより、エンジン始動モード時の第2クラッチ締結トルクであるモード遷移時トルクを、トルク抜けショックが生じない所定の中間圧である「第1トルク」に設定し、エンジン始動制御が実施される。
【0049】
このため、時刻t11以降の第2クラッチ締結トルクは、「第1トルク」に設定される。これにより、エンジン始動モード時の第2クラッチ5における締結トルク低減量が制限され、始動要求時トルクが比較的高い場合であっても、始動要求時トルクとモード遷移時トルクとのトルク差の広がりが抑えられる。この結果、大きなトルク抜けショックが発生せず、トルク抜けショックの影響が抑制される。
【0050】
そして、第2クラッチ締結トルクが「第1トルク」に設定されると同時にモータトルクの上昇を開始する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクの変化率を、上記モード遷移時トルクを「第2トルク」に設定するときのモータトルクの変化率に比べて、大きい値に設定する。すなわち、図12に示すように、時刻t11時点からモータトルクを上昇させる際の特性勾配θ1を、モード遷移時トルクを「第2トルク」に設定したときにおけるモータトルク上昇の特性勾配θ2よりも大きくする。
これにより、第2クラッチ5に入力されるトルクが速やかに上昇することになり、第2クラッチ5のスリップが発生するまでの時間の増長が防止される。
【0051】
また、時刻t13において、モータ回転数が所定回転数に達することで第2クラッチ5がスリップしたと判断し、第2クラッチ5の締結トルクを徐々に増加する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクは、第2クラッチ5のスリップ締結に必要な所定値δに維持する。この「所定値δ」は、上記モード遷移時トルクを「第2トルク」に設定するときのモータトルクに比べて、大きい値に設定する。すなわち、図12に示すように、この所定値δは、モード遷移時トルクを「第2トルク」に設定したときにおけるモータトルク(所定値γ)よりも大きくする。
これにより、第2クラッチ5に入力されるトルクの絶対値が比較的大きな値になり、第2クラッチ5のスリップ状態が確実に維持される。
【0052】
そして、時刻t15において、第2クラッチ5のスリップが確認されたら第1クラッチ4を半締結状態にし、モータジェネレータ2をスタータモータとしてエンジン1をクランキングする。その後、エンジン回転数が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、時刻t16において、第1クラッチ4を完全締結することで、エンジン始動モードを終了してWSCモードへと移行する。
【0053】
(2) 始動時要求トルクがショック非発生トルク以下のとき
図12に示す時刻t10時点において、ハイブリッド車両はエンジン1が停止したEVモードであり、Dレンジで走行中にブレーキをON操作して車両を停止した状態である。
【0054】
時刻t11において、エアコンの使用等によってバッテリSOCが下限閾値を下回ると、エンジン始動要求が発生する。このとき、車両は停止(車速VSP<停止判定閾値、且つ、ブレーキ踏力>ブレーキON判定閾値)しており、エンジン始動要求時(時刻t11時点)での第2クラッチ締結トルクである始動要求時トルクは、ショック非発生トルク(ここでは、所定値α)よりも低くなっている。
【0055】
すなわち、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS7へと進み、モード遷移時トルクを「第2トルク」に設定し、エンジン始動制御が実施される。
【0056】
これにより、時刻t11以降の第2クラッチ5の締結トルクは、上記「第1トルク」よりも小さく、ほぼゼロNm相当となる値である「第2トルク」に設定される。そして、これと同時にモータトルクの上昇を開始する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクの変化率を、上記モード遷移時トルクを「第1トルク」に設定するときのモータトルクの変化率に比べて、小さい値に設定する。すなわち、図12に示すように、時刻t11時点からモータトルクを上昇させる際の特性勾配θ2を、モード遷移時トルクを「第1トルク」に設定したときにおけるモータトルク上昇の特性勾配θ1よりも小さくする。
これにより、第2クラッチ5に入力されるトルクが緩やかに上昇することになり、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックが防止される。
【0057】
時刻t12において、モータトルクが所定値に達すると、モータ回転数が上昇を開始する。
【0058】
時刻t13において、モータ回転数が所定回転数に達すると、第2クラッチ5における差回転が所定値になり第2クラッチ5がスリップしたと判断し、第2クラッチ5の締結トルクを徐々に増加する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクは、第2クラッチ5のスリップ締結に必要な所定値γに維持する。この「所定値γ」は、上記モード遷移時トルクを「第1トルク」に設定するときのモータトルクに比べて、小さい値に設定する。すなわち、図12に示すように、この所定値γは、モード遷移時トルクを「第1トルク」に設定したときにおけるモータトルク(所定値δ)よりも小さくする。
これにより、第2クラッチ5に入力されるトルクの絶対値が比較的小さな値になり、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックが防止される。
【0059】
そして、時刻t14において、第2クラッチ5のスリップが確認されたら、第1クラッチ4を半締結状態にし、モータトルクをエンジンクランキングに必要な程度に上昇させる。これにより、モータジェネレータ2をスタータモータとして、エンジン1がクランキングされる。
【0060】
これにより、時刻t15時点からエンジン回転数は上昇を始める。その後、エンジン回転数が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、時刻t16において、モータ回転数とエンジン回転数が近くなったら第1クラッチ4を完全に締結し、エンジン始動モードを終了してWSCモードへと移行する。
【0061】
上記のように、実施例1では、始動要求時トルクがショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクよりも大きいときに比べて、モード遷移時トルクを小さい値に設定する構成を採用した。すなわち、始動要求時トルクがショック非発生トルク以下のときには、モード遷移時トルクを、「第1トルク」よりも小さい値である「第2トルク」に設定する構成を採用した。
この構成により、第2クラッチ5のトルク抜けによるショックの影響を考慮しなくてよいシーンでは、第2クラッチ5をスリップさせる際に、この第2クラッチ5の締結トルクを大幅に低減することとなる。したがって、第2クラッチ5は、エンジン始動要求の発生と同時にほぼ開放した状態になり、早急にスリップ状態にされる(図12では、時刻t11〜時刻t13)。これにより、トルク抜けショックが発生しないシーンに限って、第2クラッチ5がスリップするまでの時間を短縮し、エンジン始動完了までの時間(図12では、時刻t16時点でエンジン始動完了)が短くなる。さらに、エンジン1が短時間で始動することで、エンジン1の駆動力でモータジェネレータ2を発電機として駆動して発電を行うまでの時間も短くなる。また、第2クラッチ5が早急にスリップすることでモータ負荷の低減が図られ、モータエネルギーの節約、つまり省エネルギー化が図られる。
【0062】
一方、始動要求時トルクがショック非発生トルクより大きいときには、モード遷移時トルクを、トルク抜けショックが生じない所定の中間圧である「第1トルク」に設定する構成を採用した。
この構成により、トルク抜けショックの影響を考慮する必要がある通常シーンでは、第2クラッチ5をスリップさせる際に、この第2クラッチ5における締結トルクの低減量を制限することとなる。したがって、第2クラッチ5においてトルク抜けショックが発生するシーンでは、トルク抜けショックの影響が確実に抑制される。
【0063】
さらに、上記実施例1では、図10に示すフローチャートのステップS4での判断のように、車両停止のときに限ってモード遷移時トルクを「第2トルク」に設定する構成を採用した。
この構成により、車両が走行しているときに第2クラッチ5の締結トルクが大幅に低減し、トルク抜けが発生してしまうことを防止する。
【0064】
また、上記実施例1では、図10に示すフローチャートのステップS5での判断のように、ブレーキ装置がON操作されているときに限ってモード遷移時トルクを「第2トルク」に設定する構成を採用した。
この構成により、AT入力回転センサ12によって検出不可能な極低車速状態において車両停止を判断できず、車両走行中にトルク抜けが発生してしまうことを防止する。つまり、車両搭載の車速検出センサの検出不能領域における誤判定によるトルク抜けの発生を防止する。
【0065】
そして、上記実施例1では、図12に示すタイムチャートのように、Dレンジでの走行中ではショック非発生トルクを所定値αに設定し、エンジン始動要求時にリバースレンジ(Rレンジ)の場合にはショック非発生トルクを所定値β(>α)に設定する構成を採用した。
この構成により、走行レンジに応じて、第2クラッチ5のトルク抜けによるショックが発生しない条件、つまりショック非発生トルクの値を最適な値に設定することとなり、トルク抜けショックの影響がさらに適切に抑制される。
【0066】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0067】
(1) エンジン1と、モータ(モータジェネレータ)2と、前記エンジン1と前記モータ2の連結部に設けられ、前記エンジン1と前記モータ2を駆動源とするハイブリッド車モード(HEVモード)と、前記モータ2を駆動源とする電気自動車モード(EVモード)と、を切り替えるモード切替手段(第1クラッチ)4と、前記モータ2と駆動輪(タイヤ)7,7の間に介装され、エンジン始動要求に基づく前記電気自動車モードから前記ハイブリッド車モードへのモード遷移時、スリップ締結される摩擦要素(第2クラッチ)5と、
エンジン始動要求時の前記摩擦要素の締結トルクである始動要求時トルクが、前記摩擦要素5のトルク抜けによるショック非発生トルク以下のときには、前記始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、前記モード遷移時の前記摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定するエンジン始動制御手段(図10)と、を備える構成とした。
このため、エンジン始動時のトルク抜けショックの影響を防止しつつ、エンジン始動完了までの時間を短縮することができる。
【0068】
(2) 前記エンジン始動制御手段(図10)は、前記始動要求時トルクが前記ショック非発生トルクより大きいときには、前記モード遷移時トルクを第1トルクに設定し、前記始動要求時トルクが前記ショック非発生トルク以下のときには、前記モード遷移時トルクを、前記第1トルクよりも小さい値である第2トルクに設定する構成とした。
このため、(1)の効果に加え、摩擦要素のトルク抜けによるショックが発生しないシーンに限って、摩擦要素をスリップさせるまでの時間を確実に短縮することができる。
【0069】
(3) 前記エンジン始動制御手段(図10)は、車両停止時、前記モード遷移時トルクを前記第2トルクに設定する(ステップS4)構成とした。
このため、(1)又は(2)の効果に加え、車両走行中にトルク抜けショックが発生することを防止できる。
【0070】
(4) 前記エンジン始動制御手段(図10)は、ブレーキ作動時、前記モード遷移時トルクを前記第2トルクに設定する(ステップS5)構成とした。
このため、上記(1)〜(3)の効果に加え、車両走行中にトルク抜けショックが発生することを防止できる。
【0071】
(5) 前記エンジン始動制御手段(図10)は、前記モード遷移時トルクを前記第2トルクに設定するときの前記摩擦要素5への入力トルクの絶対値(所定値γ)を、前記モード遷移時トルクを前記第1トルクに設定するときの摩擦要素5への入力トルクの絶対値(所定値δ)に比べて、小さい値に設定する構成とした。
このため、上記(1)〜(4)の効果に加え、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックを防止できる。
【0072】
(6) 前記エンジン始動制御手段(図10)は、前記モード遷移時トルクを前記第2トルクに設定するときの前記第摩擦要素5への入力トルクの変化率(θ2)を、前記モード遷移時トルクを前記第1トルクに設定するときの前記摩擦要素5への入力トルクの変化率(θ1)に比べて、小さい値に設定する構成とした。
このため、上記(1)〜(5)の効果に加え、第2クラッチ5への入力トルクが原因で発生する突き上げショックを防止できる。
【0073】
(7) 前記エンジン始動制御手段(図10)は、前記ショック非発生トルクの値を、走行レンジに応じて設定する構成とした。
このため、上記(1)〜(6)の効果に加え、走行レンジに応じて、ショック非発生トルクの値を最適な値に設定することとなり、トルク抜けショックの影響がさらに適切に抑制できる。
【0074】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0075】
実施例1では、始動要求時トルクがショック非発生トルクより大きいときに、モード遷移時トルクを「第1トルク」に設定し、始動要求時トルクがショック非発生トルク以下のときに、モード遷移時トルクを「第2トルク」に設定する。しかしながら、始動要求時トルクがショック非発生トルク以下のときのモード遷移時トルクが、始動要求時トルクがショック非発生トルクより大きいときのモード遷移時トルクに対して、相対的に小さい値であれば良い。すなわち、モード遷移時トルクは特定の値でなくともよく、例えば車両状況等に応じて変化したり、補正したりしてもよい。
【0076】
また、実施例1では、第2クラッチ5のトルク抜けショックを考慮しなくて良いシーンの例として、車両停止時にエンジン始動要求が発生したシーンを示した。しかし、エンジン始動要求時に第2クラッチ5における締結トルクが低い場合であれば他の例であってもよく、本発明を適用することができる。
【0077】
実施例1では、第2クラッチ5を、有段式の自動変速機3に内蔵した摩擦要素の中から選択する例を示した。しかし、自動変速機3とは別に第2クラッチ5を設けても良く、例えば、モータジェネレータ2と変速機入力軸との間に自動変速機3とは別に第2クラッチ5を設ける例や、変速機出力軸とタイヤ7,7の間に自動変速機3とは別に第2クラッチ5を設ける例も含まれる。
【0078】
実施例1では、HEVモードとEVモードを切り替えるモード切り替え手段として、第1クラッチ4を用いる例を示した。しかし、HEVモードとEVモードを切り替えるモード切り替え手段としては、例えば、プラネタリギア等のように、クラッチを用いることなくクラッチ機能を発揮するような差動装置や動力分割装置を用いる例としても良い。
【符号の説明】
【0079】
1 エンジン
2 モータジェネレータ(モータ)
3 自動変速機
4 第1クラッチ(モード切替手段)
5 第2クラッチ(摩擦要素)
6 ディファレンシャルギア
7 タイヤ(駆動輪)
8 インバータ
9 バッテリ
10 エンジン回転センサ
11 MG回転センサ
12 AT入力回転センサ
13 AT出力回転センサ
14,15 ソレノイドバルブ
16 SOCセンサ
17 アクセル開度センサ
20 統合コントローラ
21 エンジンコントローラ
22 モータコントローラ
23 ブレーキ油圧センサ
【技術分野】
【0001】
本発明は、エンジン始動要求に基づいて、電気自動車モードからハイブリッド車モードへとモード遷移するとき、モータと駆動輪の間の摩擦要素をスリップ締結するハイブリッド車両の制御装置に関するものである。
【背景技術】
【0002】
従来、電気自動車モードからハイブリッド車モードへのモード遷移の際、モータと駆動輪の間に介装された第2クラッチの締結トルクを低減してスリップさせた後、エンジンとモータの間に介装された第1クラッチを締結してエンジン始動するハイブリッド車両の制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007-131071号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来装置にあっては、第2クラッチをスリップさせる際、第2クラッチの締結トルクの低減しすぎによるトルク抜けショックの発生を防止するため、第2クラッチにおける締結トルクの低減量を制限していた。そのため、エンジン始動要求から第2クラッチのスリップまでに時間がかかり、エンジン始動完了までの時間が長くなってしまう、という問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、エンジン始動時のトルク抜けショックの影響を抑制しつつ、エンジン始動完了までの時間を短縮することができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明のハイブリッド車両の制御装置は、エンジンと、モータと、モード切替手段と、摩擦要素と、エンジン始動制御手段と、を備える。
前記モード切替手段は、エンジンとモータを駆動源とするハイブリッド車モードと、モータを駆動源とする電気自動車モードと、を切り替える。前記摩擦要素は、エンジン始動要求に基づくハイブリッド車モードから電気自動車モードへのモード遷移時、スリップ締結される。
前記エンジン始動制御手段は、エンジン始動要求時の摩擦要素の締結トルクである始動要求時トルクが、摩擦要素のトルク抜けによるショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクよりも大きいときに比べて、モード遷移時の摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定する。
【発明の効果】
【0007】
よって、始動要求時トルクがショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクより大きいときに比べて、モード遷移時トルクを小さい値に設定してエンジン始動制御を実施する。
したがって、始動要求時トルクがショック非発生トルク以下では、モード遷移時トルクを小さくすることで摩擦要素は早急にスリップする。一方、エンジン始動要求時の摩擦要素の締結トルクは、摩擦要素のトルク抜けによるショック非発生トルク以下であるため、摩擦要素が早急にスリップしてもトルク抜けショックの影響は小さい。
そのため、トルク抜けショックの影響が小さいシーンに限って、摩擦要素のスリップ開始までの時間を短縮することができ、この結果、トルク抜けショックの影響を抑制しつつ、エンジン始動完了までの時間を短縮することができる。
【図面の簡単な説明】
【0008】
【図1】実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。
【図2】実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。
【図3】実施例1の統合コントローラを示す演算ブロック図である。
【図4】実施例1の制御装置で用いられる目標定常トルクマップ(a)とMGアシストトルクマップ(b)を示すマップ図である。
【図5】実施例1の制御装置で用いられるエンジン始動停止線マップを示すマップ図である。
【図6】実施例1の制御装置で用いられるバッテリSOCに対する走行中発電要求出力マップを示すマップ図である。
【図7】実施例1の制御装置で用いられるエンジンの最適燃費線を示す特性図である。
【図8】実施例1の自動変速機における変速線の一例を示す変速マップ図である。
【図9】ハイブリッド車両での運転モード遷移の一例を示す説明図である。
【図10】実施例1の統合コントローラにて実行されるエンジン始動制御処理の構成と流れを示すフローチャートである。
【図11】ハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。
【図12】実施例1の制御装置を搭載したハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0010】
まず、構成を説明する。
図1は、実施例1の制御装置が適用されたハイブリッド車両のパワートレインを示すパワートレイン構成図である。以下、図1に基づき、パワートレイン構成を説明する。
【0011】
実施例1のハイブリッド車両のパワートレイン系には、図1に示すように、エンジン1と、モータジェネレータ2(モータ;以下、「MG」と記載する。)と、自動変速機3(以下、「AT」と記載する。)と、第1クラッチ4(モード切替手段;以下、「CL1」と記載する。)と、第2クラッチ5(摩擦要素;以下、「CL2」と記載する。)と、ディファレンシャルギア6と、タイヤ7,7(駆動輪)と、を備えている。つまり、エンジン1と1モータ・2クラッチをパワートレイン系に備えた構成としている。
【0012】
前記エンジン1は、エンジン出力軸とモータジェネレータ2のモータ入力軸とが、トルク容量可変の第1クラッチ4を介して連結される。前記モータジェネレータ2は、モータ出力軸と自動変速機3の変速機入力軸とが、直接連結される。前記自動変速機3は、複数の摩擦要素を有する有段変速機であり、変速機出力軸にディファレンシャルギア6を介して駆動輪であるタイヤ7,7が連結される。
【0013】
前記第2クラッチ5は、自動変速機3の変速段に応じて異なる変速機内の動力伝達を担っているトルク容量可変のクラッチ・ブレーキによる複数の摩擦要素のうち、1つの摩擦要素を選択して用いている。これにより自動変速機3は、第1クラッチ4を介して入力されるエンジン1の動力と、モータジェネレータ2から入力される動力と、を合成してタイヤ7,7へ出力する。
【0014】
前記第1クラッチ4としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる乾式単板クラッチや乾式多板クラッチ等を用いればよい。前記第2クラッチ5としては、例えば、比例ソレノイドで油流量および油圧を連続的に制御できる湿式多板クラッチや湿式多板ブレーキ等を用いればよい。
【0015】
このパワートレイン系には、第1クラッチ4の接続状態に応じて2つの運転モードを有する。第1クラッチ4を切断したCL1開放状態では、モータジェネレータ2の動力のみで走行する電気自動車モード(以下、「EVモード」という)となる。このEVモードは、要求駆動トルクが低く、バッテリSOCが確保されているときに選択される。一方、第1クラッチ4を接続したCL1締結状態では、エンジン1とモータジェネレータ2の動力で走行するハイブリッド車モード(以下、「HEVモード」という)となる。このHEVモードは、要求駆動トルクが高いときやバッテリSOCが不足するようなときに選択される。そして、EVモード時にエンジン始動要求が発生すると、EVモードから「エンジン始動モード」→「WSCモード(駆動トルクコントロールモード)」といったモード遷移状態を経てHEVモードへと移行する(図9参照)。
【0016】
さらに、前記パワートレインには、エンジン1の回転数を検出するエンジン回転センサ10と、モータジェネレータ2の回転数を検出するMG回転センサ11と、自動変速機3の入力軸回転数を検出するAT入力回転センサ12と、自動変速機3の出力軸回転数を検出するAT出力回転センサ13と、が設けられる。
【0017】
図2は、実施例1の制御装置が適用されたハイブリッド車両の制御システムを示す制御システム構成図である。以下、図2に基づいて、制御システム構成を説明する。
【0018】
実施例1の制御システムは、図2に示すように、統合コントローラ20と、エンジンコントローラ21と、モータコントローラ22と、インバータ8と、バッテリ9と、ソレノイドバルブ14と、ソレノイドバルブ15と、アクセル開度センサ17と、ブレーキ油圧センサ23と、SOCセンサ16と、を備えている。
【0019】
前記統合コントローラ20は、パワートレイン系の動作点を統合制御する。この統合コントローラ20では、アクセル開度APOと、バッテリSOCと、車速VSP(AT出力回転センサ13により検出される自動変速機出力軸回転数に比例する)と、に応じて、運転者が望む駆動力を実現できる運転モードを選択する。そして、選択した運転モードに応じ、モータコントローラ22に対し目標MGトルクもしくは目標MG回転数を指令し、エンジンコントローラ21に対し目標エンジントルクを指令し、ソレノイドバルブ14,15に対し駆動信号を指令する。
【0020】
前記エンジンコントローラ21は、エンジン1を制御する。前記モータコントローラ22は、モータジェネレータ2を制御する。前記インバータ8は、モータジェネレータ2を駆動する。前記バッテリ9は、電気エネルギーを蓄える。前記ソレノイドバルブ14は、第1クラッチ4の油圧を制御する。前記ソレノイドバルブ15は、第2クラッチ5の油圧を制御する。前記アクセル開度センサ17は、アクセル開度(APO)を検出する。前記ブレーキ油圧センサ23は、ブレーキ油圧(BPS)を検出する。なお、ブレーキ踏力は、このブレーキ油圧センサ23により検出されるブレーキ油圧BPSに比例する。前記SOCセンサ16は、バッテリ9の充電容量状態であるバッテリSOCを検出する。
【0021】
図3は、実施例1の統合コントローラを示す演算ブロック図である。以下、図3に基づいて、統合コントローラ20の構成を説明する。
【0022】
前記統合コントローラ20は、図3に示すように、目標駆動トルク演算部100と、モード選択部200と、目標発電出力演算部300と、動作点指令部400と、変速制御部500と、を備えている。
【0023】
前記目標駆動トルク演算部100は、図4(a)に示す目標定常トルクマップと、図4(b)に示すMGアシストトルクマップを用いて、アクセル開度APOと車速VSPから、目標駆動トルクである目標定常トルクとMGアシストトルクを算出する。
【0024】
前記モード選択部200は、車速VSPおよびアクセル開度APOと、図5に示すエンジン始動停止線マップと、バッテリSOCと、を用いて、最適な運転モード(HEVモード、EVモード)を検索し、検索した運転モードを目標走行モードして選択する。エンジン始動停止線マップにおいて、エンジン始動線とエンジン停止線は、エンジン始動線(SOC高、SOC低)とエンジン停止線(SOC高、SOC低)の特性に代表されるように、バッテリSOCが低くなるにつれて、アクセル開度APOが小さくなる方向に低下する特性として設定されている。なお、エンジン始動要求は、EVモード状態で図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えた時点で発生するほか、バッテリSOCが下限閾値を下回ったときに発生する。
【0025】
前記目標発電出力演算部300は、図6に示す走行中発電要求出力マップを用いて、バッテリSOCから目標発電出力を演算する。また、現在の動作点から図7で示す最適燃費線までエンジントルクを上げるために必要な出力を演算し、前記目標発電出力と比較して少ない出力を要求出力として、エンジン出力に加算する。
【0026】
前記動作点指令部400では、アクセル開度APOと目標駆動トルク(目標定常トルク,MGアシストトルク)と目標走行モードと車速VSPと目標発電出力とを入力する。そして、これらの入力情報を動作点到達目標として、過渡的な目標エンジントルクと目標MGトルクと目標CL2トルク容量と目標ATシフトとCL1ソレノイド電流指令を演算する。
【0027】
前記変速制御部500は、目標CL2トルク容量と目標ATシフトとから、これらを達成するように自動変速機3内のソレノイドバルブを駆動制御するATソレノイド電流指令を演算する。図8には、変速制御で用いられる変速線マップの一例を示す。変速制御は、車速VSPとアクセル開度APOによる運転点と変速線マップに基づいて、現在のギヤ段から次ギヤ段をどのギヤ段にするかを判定する。そして、運転点が変速線マップのアップ変速線(図8の実線)またはダウン変速線(図8の点線)を横切るとアップ変速要求またはダウン変速要求を出し、変速要求に対応する自動変速機3の摩擦要素を締結/開放制御して変速させる。なお、実施例1では、変速時に自動変速機3の入力側に有するモータジェネレータ2による回転数制御を加えることで、油圧制御だけによる変速制御の場合に比べ、イナーシャフェーズ領域でのギヤ比変化を滑らかにする変速制御を行うようにしている。
【0028】
図10は、実施例1の統合コントローラにて実行されるエンジン始動制御処理(エンジン始動制御手段)の構成と流れを示すフローチャートである。以下、図10の各ステップについて説明する。
【0029】
ステップS1では、EVモード時にエンジン始動条件が成立したか否かを判断する。YES(条件成立)の場合はステップS2へ進み、NO(条件不成立)の場合はステップS1を繰り返す。
ここで、エンジン始動条件の成立とは、エンジン始動要求が生じることである。図5に示すエンジン始動線をアクセル開度APOと車速VSPによる運転点が超えるか、バッテリSOCが下限閾値を下回ったときにエンジン始動条件が成立した(エンジン始動要求が生じた)と判断する。
【0030】
ステップS2では、ステップS1でのエンジン始動条件成立との判断に続き、運転モードをEVモードからモード遷移状態であるエンジン始動モードへと移行し、ステップS3に進む。
【0031】
ステップS3では、ステップS2でのエンジン始動モードへの移行に続き、エンジン始動条件成立時(エンジン始動要求時)の第2クラッチ5における締結トルクである「始動要求時トルク」が、「ショック非発生トルク」以下であるか否かを判断する。YES(始動要求時トルク≦ショック非発生トルク)の場合にはステップS4へ進み、NO(始動要求時トルク>ショック非発生トルク)の場合にはステップS6へ進む。
ここで、第2クラッチ5における締結トルクが一定値以上のあるところから低減しすぎると、第2クラッチ5での伝達トルク容量が下がりすぎてトルク抜けによるショックが発生してしまう。なお、「トルク抜け」とは、第2クラッチ5の伝達トルク容量の低下により、駆動源から駆動輪に伝達する駆動トルクの少なくとも一部が第2クラッチ5で遮断され、車両の駆動トルクが急激に低下することをいう。
これに対し、「ショック非発生トルク」とは、第2クラッチ5の締結トルクをゼロNm相当まで低減してもトルク抜けの影響が低い(トルク抜けによる車両のショックがほとんど発生しない、あるいは、ショックが発生しても許容されるレベル)と判断できる締結トルク値である。この「ショック非発生トルク」は、エンジン始動要求時の走行レンジに応じてあらかじめ任意の値に設定する。例えば、エンジン始動要求時にドライブレンジ(Dレンジ)の場合には「ショック非発生トルク」を所定値αに設定し、エンジン始動要求時にリバースレンジ(Rレンジ)の場合には「ショック非発生トルク」を所定値β(>α)に設定する。
ここで、トルク抜けによるショックの大きさは、第2クラッチ5の伝達トルク容量を低下させる際の条件によって変化する。具体的には、伝達トルク容量を低下させる前と後との変化幅の大きさ、伝達トルク容量を低下させる際の変化率、第2クラッチ5を作動させるための作動液の温度等によって変化する。そのため、「ショック非発生トルク」は、実験等により予め求めておくことが好ましい。
【0032】
ステップS4では、ステップS3での始動要求時トルク≦ショック非発生トルクとの判断に続き、車両が停止しているか否かを判断する。YES(車両停止)の場合にはステップS5へ進み、NO(車両走行)の場合にはステップS6へ進む。
ここで、車両が停止しているか否かは、AT出力回転センサ13により検出される自動変速機出力軸回転数に比例して求められる車速VSPが停止判定閾値(≒ゼロ)未満であるか否かによって判断する。車速VSPが停止判定閾値未満であれば、車両停止と判断する。
【0033】
ステップS5では、ステップS4での車両停止との判断に続き、ブレーキがON操作されているか否かを判断する。YES(ブレーキON)の場合にはステップS7へ進み、NO(ブレーキOFF)の場合にはステップS6へ進む。
ここで、ブレーキがON操作されているか否かは、ブレーキ油圧センサ23により検出されるブレーキ油圧(BPS)に比例して求められるブレーキ踏力がブレーキON判定閾値以上であるか否かによって判断する。ブレーキ踏力がブレーキON判定閾値以上であれば、ブレーキがON操作されていると判断する。
【0034】
ステップS6では、ステップS3での始動要求時トルク>ショック非発生トルクとの判断、ステップS4での車両走行との判断、ステップS5でのブレーキOFF操作との判断、のいずれかに続き、「モード遷移時トルク」を「第1トルク」に設定して、エンジン始動制御を実施し、エンドへ進む。
ここで、エンジン始動制御は、まず、第2クラッチ5をスリップ締結させるために、第2クラッチ5における締結トルクを低減する。そして、第2クラッチ5がスリップしたと判断すると、第1クラッチ4を半締結状態にし、モータジェネレータ2をスタータモータとして、モータトルクを上昇させることでエンジン1をクランキングする。これによりエンジン回転数は上昇を始める。一方、第2クラッチ5の締結トルクは、第2クラッチ5がスリップした後、車両状態や運転者操作状態に応じて決まる要求駆動トルクとなるようにコントロールされる。そして、エンジン回転数が初爆可能な回転数に達成したら燃料供給や点火によりエンジン1を燃焼作動させ、モータ回転数とエンジン回転数が近くなった時点で第1クラッチ4を完全に締結する。これにより、エンジン始動モードからWSCモードへ移行し、エンジン始動制御は完了する。さらにその後、第2クラッチ5をロックアップさせてHEVモードに移行することで、モード遷移が終了する。
そして、このステップS6では、エンジン始動制御中、第2クラッチ5をスリップ締結させる際の第2クラッチ5における締結トルクである「モード遷移時トルク」を、「第1トルク」まで低減する。この「第1トルク」とは、第2クラッチ5を締結トルクがゼロNm相当となるまで開放せず、トルク抜けショックが生じない所定の中間圧であり、車両状態や運転者操作状態に応じて決まる要求駆動トルクよりわずかに低い値である。これにより、「モード遷移時トルク」が「第1トルク」よりも小さい値にならないようにトルク低減量が制限され、第2クラッチ5での伝達トルク容量が確保される。
【0035】
ステップS7では、ステップS5でのブレーキONとの判断に続き、「モード遷移時トルク」を「第2トルク」に設定して、エンジン始動制御を実施し、エンドへ進む。
ここで、エンジン始動制御については、上記ステップS6と同様である。
一方、このステップS7では、エンジン始動中、第2クラッチ5をスリップ締結させるために、「モード遷移時トルク」を、「第2トルク」まで低減する。この「第2トルク」とは、ステップS6において設定した「第1トルク」よりも小さい値であり、ここでは締結トルクがほぼゼロNm相当となる値である。すなわち、始動要求時トルクがショック非発生トルク以下のときでは、「モード遷移時トルク」におけるトルク低減量は大きくなる。
【0036】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における「エンジン始動制御作用」を、(1)始動要求時トルクがショック非発生トルクより大きいとき、 (2)始動要求時トルクがショック非発生トルク以下のとき、に分けて説明する。
【0037】
[比較例の課題]
図11は、ハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。図中、実線で実施例1のハイブリッド制御装置の適用時の状態を示し、破線で比較例1の状態を示す。
【0038】
エンジン始動要求に基づくEVモードからHEVモードへのモード遷移時、第2クラッチをスリップさせるための第2クラッチにおける締結トルクの低減量を制限し、第2クラッチでのトルク抜けによるショックが発生しないようにするものを比較例1とする。つまり、この比較例1では、モード遷移時の第2クラッチ締結トルク(以下、「モード遷移時トルク」という)をトルク抜けショックが生じない所定の中間圧である「第1トルク」に設定する。
【0039】
この比較例1の場合、エンジン始動要求時の第2クラッチ締結トルク(以下、「始動要求時トルク」という)に対して、モード遷移時の締結トルク低減量を制限しているために、第2クラッチが開放しすぎず、トルク抜けショックの発生が防止される。すなわち、モード遷移時のトルク抜けショックは、始動要求時トルクとモード遷移時トルクとのトルク差によって生じるものである。ここで、モード遷移時の締結トルク低減量を制限することで、始動要求時トルクとモード遷移時トルクとのトルク差が広がらず、ショックの発生を抑制することとなる。
【0040】
しかしながら、例えば図11において破線で示すように、車両停止中にバッテリSOCが不足してエンジン始動要求が発生した場合等のように、始動要求時トルクが元々低い場合には、モード遷移時トルクに拘らずトルク差が広がることはない。つまり、第2クラッチでのトルク抜けによるショックを考慮する必要はない。
【0041】
これに対し、比較例1では締結トルク低減量を制限してモード遷移時トルクを「第1トルク」に設定してしまうために、始動要求時トルクが元々低い場合であってもモード遷移時トルクを小さな値に設定することができない。そのため、第2クラッチがスリップするまでの時間が増長し(図11では、時刻t1〜時刻t2)、エンジン始動完了までの時間(図11では、時刻t3時点でエンジン始動完了)が長くなってしまっていた。
【0042】
一方、EVモードからHEVモードへのモード遷移時、第2クラッチをスリップさせるための第2クラッチにおける締結トルクの低減量を制限せず、ゼロNm相当まで低減するものを比較例2とする。
【0043】
この比較例2の場合、始動要求時トルクの大きさに拘らず、モード遷移時トルクをゼロNm相当まで低減してしまう。そのため、第2クラッチは早急にスリップすることとなる。しかしながら、始動要求時トルクが大きい場合には、モード遷移時トルクとのトルク差が広がってしまい、大きなトルク抜けショックが発生してしまう。
【0044】
このように、比較例1の場合ではモード遷移時のトルク低減量を制限することで、トルク抜けショックを考慮しなくてもいい場合にエンジン始動時間がかかってしまう、という課題が生じる。また、比較例2の場合ではモード遷移時のトルク低減量を制限しないことで、始動要求時トルクが大きい場合に、大きなトルク抜けショックが発生してしまう、という課題が生じる。このように抜けショックの影響抑制と、エンジン始動時間の短縮といった2つの要求性能を同時に満足するには至らなく、逆に、2つの課題を同時に露呈させてしまう結果になる。
【0045】
[エンジン始動制御作用]
(1) 始動要求時トルクがショック非発生トルクより大きいとき
図12は、実施例1の制御装置を搭載したハイブリッド車両の停車時にエンジン始動要求が発生したときの第2クラッチ(CL2)締結トルク・モータトルク・モータ回転数・エンジン回転数・ブレーキ踏力・車速の各特性を示すタイムチャートである。図中、実線で始動要求時トルクがショック非発生トルクより大きいときを示し、破線で始動要求時トルクがショック非発生トルクより小さいときを示す。
【0046】
図12に示す時刻t10時点において、ハイブリッド車両は、エンジン1が停止したEVモード中の車両停止状態であって、第2クラッチ5における伝達駆動トルクが比較的高い状態である。すなわち、時刻t10時点での第2クラッチ締結トルクは、ショック非発生トルクよりも高い値となっている。
【0047】
そのため、バッテリSOC不足等により時刻t11においてエンジン始動要求が発生すると、このときの第2クラッチ5の締結トルクである始動要求時トルクは、ショック非発生トルク(ここでは、所定値α及びβ)よりも大きい値となる。
【0048】
すなわち、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3へと進み、ステップS6へと進む。これにより、エンジン始動モード時の第2クラッチ締結トルクであるモード遷移時トルクを、トルク抜けショックが生じない所定の中間圧である「第1トルク」に設定し、エンジン始動制御が実施される。
【0049】
このため、時刻t11以降の第2クラッチ締結トルクは、「第1トルク」に設定される。これにより、エンジン始動モード時の第2クラッチ5における締結トルク低減量が制限され、始動要求時トルクが比較的高い場合であっても、始動要求時トルクとモード遷移時トルクとのトルク差の広がりが抑えられる。この結果、大きなトルク抜けショックが発生せず、トルク抜けショックの影響が抑制される。
【0050】
そして、第2クラッチ締結トルクが「第1トルク」に設定されると同時にモータトルクの上昇を開始する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクの変化率を、上記モード遷移時トルクを「第2トルク」に設定するときのモータトルクの変化率に比べて、大きい値に設定する。すなわち、図12に示すように、時刻t11時点からモータトルクを上昇させる際の特性勾配θ1を、モード遷移時トルクを「第2トルク」に設定したときにおけるモータトルク上昇の特性勾配θ2よりも大きくする。
これにより、第2クラッチ5に入力されるトルクが速やかに上昇することになり、第2クラッチ5のスリップが発生するまでの時間の増長が防止される。
【0051】
また、時刻t13において、モータ回転数が所定回転数に達することで第2クラッチ5がスリップしたと判断し、第2クラッチ5の締結トルクを徐々に増加する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクは、第2クラッチ5のスリップ締結に必要な所定値δに維持する。この「所定値δ」は、上記モード遷移時トルクを「第2トルク」に設定するときのモータトルクに比べて、大きい値に設定する。すなわち、図12に示すように、この所定値δは、モード遷移時トルクを「第2トルク」に設定したときにおけるモータトルク(所定値γ)よりも大きくする。
これにより、第2クラッチ5に入力されるトルクの絶対値が比較的大きな値になり、第2クラッチ5のスリップ状態が確実に維持される。
【0052】
そして、時刻t15において、第2クラッチ5のスリップが確認されたら第1クラッチ4を半締結状態にし、モータジェネレータ2をスタータモータとしてエンジン1をクランキングする。その後、エンジン回転数が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、時刻t16において、第1クラッチ4を完全締結することで、エンジン始動モードを終了してWSCモードへと移行する。
【0053】
(2) 始動時要求トルクがショック非発生トルク以下のとき
図12に示す時刻t10時点において、ハイブリッド車両はエンジン1が停止したEVモードであり、Dレンジで走行中にブレーキをON操作して車両を停止した状態である。
【0054】
時刻t11において、エアコンの使用等によってバッテリSOCが下限閾値を下回ると、エンジン始動要求が発生する。このとき、車両は停止(車速VSP<停止判定閾値、且つ、ブレーキ踏力>ブレーキON判定閾値)しており、エンジン始動要求時(時刻t11時点)での第2クラッチ締結トルクである始動要求時トルクは、ショック非発生トルク(ここでは、所定値α)よりも低くなっている。
【0055】
すなわち、図10のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS7へと進み、モード遷移時トルクを「第2トルク」に設定し、エンジン始動制御が実施される。
【0056】
これにより、時刻t11以降の第2クラッチ5の締結トルクは、上記「第1トルク」よりも小さく、ほぼゼロNm相当となる値である「第2トルク」に設定される。そして、これと同時にモータトルクの上昇を開始する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクの変化率を、上記モード遷移時トルクを「第1トルク」に設定するときのモータトルクの変化率に比べて、小さい値に設定する。すなわち、図12に示すように、時刻t11時点からモータトルクを上昇させる際の特性勾配θ2を、モード遷移時トルクを「第1トルク」に設定したときにおけるモータトルク上昇の特性勾配θ1よりも小さくする。
これにより、第2クラッチ5に入力されるトルクが緩やかに上昇することになり、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックが防止される。
【0057】
時刻t12において、モータトルクが所定値に達すると、モータ回転数が上昇を開始する。
【0058】
時刻t13において、モータ回転数が所定回転数に達すると、第2クラッチ5における差回転が所定値になり第2クラッチ5がスリップしたと判断し、第2クラッチ5の締結トルクを徐々に増加する。
このとき、第2クラッチ5への入力トルクの絶対値であるモータトルクは、第2クラッチ5のスリップ締結に必要な所定値γに維持する。この「所定値γ」は、上記モード遷移時トルクを「第1トルク」に設定するときのモータトルクに比べて、小さい値に設定する。すなわち、図12に示すように、この所定値γは、モード遷移時トルクを「第1トルク」に設定したときにおけるモータトルク(所定値δ)よりも小さくする。
これにより、第2クラッチ5に入力されるトルクの絶対値が比較的小さな値になり、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックが防止される。
【0059】
そして、時刻t14において、第2クラッチ5のスリップが確認されたら、第1クラッチ4を半締結状態にし、モータトルクをエンジンクランキングに必要な程度に上昇させる。これにより、モータジェネレータ2をスタータモータとして、エンジン1がクランキングされる。
【0060】
これにより、時刻t15時点からエンジン回転数は上昇を始める。その後、エンジン回転数が初爆可能な回転数に達成したらエンジン1を燃焼作動させ、時刻t16において、モータ回転数とエンジン回転数が近くなったら第1クラッチ4を完全に締結し、エンジン始動モードを終了してWSCモードへと移行する。
【0061】
上記のように、実施例1では、始動要求時トルクがショック非発生トルク以下のときには、始動要求時トルクがショック非発生トルクよりも大きいときに比べて、モード遷移時トルクを小さい値に設定する構成を採用した。すなわち、始動要求時トルクがショック非発生トルク以下のときには、モード遷移時トルクを、「第1トルク」よりも小さい値である「第2トルク」に設定する構成を採用した。
この構成により、第2クラッチ5のトルク抜けによるショックの影響を考慮しなくてよいシーンでは、第2クラッチ5をスリップさせる際に、この第2クラッチ5の締結トルクを大幅に低減することとなる。したがって、第2クラッチ5は、エンジン始動要求の発生と同時にほぼ開放した状態になり、早急にスリップ状態にされる(図12では、時刻t11〜時刻t13)。これにより、トルク抜けショックが発生しないシーンに限って、第2クラッチ5がスリップするまでの時間を短縮し、エンジン始動完了までの時間(図12では、時刻t16時点でエンジン始動完了)が短くなる。さらに、エンジン1が短時間で始動することで、エンジン1の駆動力でモータジェネレータ2を発電機として駆動して発電を行うまでの時間も短くなる。また、第2クラッチ5が早急にスリップすることでモータ負荷の低減が図られ、モータエネルギーの節約、つまり省エネルギー化が図られる。
【0062】
一方、始動要求時トルクがショック非発生トルクより大きいときには、モード遷移時トルクを、トルク抜けショックが生じない所定の中間圧である「第1トルク」に設定する構成を採用した。
この構成により、トルク抜けショックの影響を考慮する必要がある通常シーンでは、第2クラッチ5をスリップさせる際に、この第2クラッチ5における締結トルクの低減量を制限することとなる。したがって、第2クラッチ5においてトルク抜けショックが発生するシーンでは、トルク抜けショックの影響が確実に抑制される。
【0063】
さらに、上記実施例1では、図10に示すフローチャートのステップS4での判断のように、車両停止のときに限ってモード遷移時トルクを「第2トルク」に設定する構成を採用した。
この構成により、車両が走行しているときに第2クラッチ5の締結トルクが大幅に低減し、トルク抜けが発生してしまうことを防止する。
【0064】
また、上記実施例1では、図10に示すフローチャートのステップS5での判断のように、ブレーキ装置がON操作されているときに限ってモード遷移時トルクを「第2トルク」に設定する構成を採用した。
この構成により、AT入力回転センサ12によって検出不可能な極低車速状態において車両停止を判断できず、車両走行中にトルク抜けが発生してしまうことを防止する。つまり、車両搭載の車速検出センサの検出不能領域における誤判定によるトルク抜けの発生を防止する。
【0065】
そして、上記実施例1では、図12に示すタイムチャートのように、Dレンジでの走行中ではショック非発生トルクを所定値αに設定し、エンジン始動要求時にリバースレンジ(Rレンジ)の場合にはショック非発生トルクを所定値β(>α)に設定する構成を採用した。
この構成により、走行レンジに応じて、第2クラッチ5のトルク抜けによるショックが発生しない条件、つまりショック非発生トルクの値を最適な値に設定することとなり、トルク抜けショックの影響がさらに適切に抑制される。
【0066】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0067】
(1) エンジン1と、モータ(モータジェネレータ)2と、前記エンジン1と前記モータ2の連結部に設けられ、前記エンジン1と前記モータ2を駆動源とするハイブリッド車モード(HEVモード)と、前記モータ2を駆動源とする電気自動車モード(EVモード)と、を切り替えるモード切替手段(第1クラッチ)4と、前記モータ2と駆動輪(タイヤ)7,7の間に介装され、エンジン始動要求に基づく前記電気自動車モードから前記ハイブリッド車モードへのモード遷移時、スリップ締結される摩擦要素(第2クラッチ)5と、
エンジン始動要求時の前記摩擦要素の締結トルクである始動要求時トルクが、前記摩擦要素5のトルク抜けによるショック非発生トルク以下のときには、前記始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、前記モード遷移時の前記摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定するエンジン始動制御手段(図10)と、を備える構成とした。
このため、エンジン始動時のトルク抜けショックの影響を防止しつつ、エンジン始動完了までの時間を短縮することができる。
【0068】
(2) 前記エンジン始動制御手段(図10)は、前記始動要求時トルクが前記ショック非発生トルクより大きいときには、前記モード遷移時トルクを第1トルクに設定し、前記始動要求時トルクが前記ショック非発生トルク以下のときには、前記モード遷移時トルクを、前記第1トルクよりも小さい値である第2トルクに設定する構成とした。
このため、(1)の効果に加え、摩擦要素のトルク抜けによるショックが発生しないシーンに限って、摩擦要素をスリップさせるまでの時間を確実に短縮することができる。
【0069】
(3) 前記エンジン始動制御手段(図10)は、車両停止時、前記モード遷移時トルクを前記第2トルクに設定する(ステップS4)構成とした。
このため、(1)又は(2)の効果に加え、車両走行中にトルク抜けショックが発生することを防止できる。
【0070】
(4) 前記エンジン始動制御手段(図10)は、ブレーキ作動時、前記モード遷移時トルクを前記第2トルクに設定する(ステップS5)構成とした。
このため、上記(1)〜(3)の効果に加え、車両走行中にトルク抜けショックが発生することを防止できる。
【0071】
(5) 前記エンジン始動制御手段(図10)は、前記モード遷移時トルクを前記第2トルクに設定するときの前記摩擦要素5への入力トルクの絶対値(所定値γ)を、前記モード遷移時トルクを前記第1トルクに設定するときの摩擦要素5への入力トルクの絶対値(所定値δ)に比べて、小さい値に設定する構成とした。
このため、上記(1)〜(4)の効果に加え、第2クラッチ5がスリップする時に、第2クラッチ5への入力トルクが原因で発生する突き上げショックを防止できる。
【0072】
(6) 前記エンジン始動制御手段(図10)は、前記モード遷移時トルクを前記第2トルクに設定するときの前記第摩擦要素5への入力トルクの変化率(θ2)を、前記モード遷移時トルクを前記第1トルクに設定するときの前記摩擦要素5への入力トルクの変化率(θ1)に比べて、小さい値に設定する構成とした。
このため、上記(1)〜(5)の効果に加え、第2クラッチ5への入力トルクが原因で発生する突き上げショックを防止できる。
【0073】
(7) 前記エンジン始動制御手段(図10)は、前記ショック非発生トルクの値を、走行レンジに応じて設定する構成とした。
このため、上記(1)〜(6)の効果に加え、走行レンジに応じて、ショック非発生トルクの値を最適な値に設定することとなり、トルク抜けショックの影響がさらに適切に抑制できる。
【0074】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0075】
実施例1では、始動要求時トルクがショック非発生トルクより大きいときに、モード遷移時トルクを「第1トルク」に設定し、始動要求時トルクがショック非発生トルク以下のときに、モード遷移時トルクを「第2トルク」に設定する。しかしながら、始動要求時トルクがショック非発生トルク以下のときのモード遷移時トルクが、始動要求時トルクがショック非発生トルクより大きいときのモード遷移時トルクに対して、相対的に小さい値であれば良い。すなわち、モード遷移時トルクは特定の値でなくともよく、例えば車両状況等に応じて変化したり、補正したりしてもよい。
【0076】
また、実施例1では、第2クラッチ5のトルク抜けショックを考慮しなくて良いシーンの例として、車両停止時にエンジン始動要求が発生したシーンを示した。しかし、エンジン始動要求時に第2クラッチ5における締結トルクが低い場合であれば他の例であってもよく、本発明を適用することができる。
【0077】
実施例1では、第2クラッチ5を、有段式の自動変速機3に内蔵した摩擦要素の中から選択する例を示した。しかし、自動変速機3とは別に第2クラッチ5を設けても良く、例えば、モータジェネレータ2と変速機入力軸との間に自動変速機3とは別に第2クラッチ5を設ける例や、変速機出力軸とタイヤ7,7の間に自動変速機3とは別に第2クラッチ5を設ける例も含まれる。
【0078】
実施例1では、HEVモードとEVモードを切り替えるモード切り替え手段として、第1クラッチ4を用いる例を示した。しかし、HEVモードとEVモードを切り替えるモード切り替え手段としては、例えば、プラネタリギア等のように、クラッチを用いることなくクラッチ機能を発揮するような差動装置や動力分割装置を用いる例としても良い。
【符号の説明】
【0079】
1 エンジン
2 モータジェネレータ(モータ)
3 自動変速機
4 第1クラッチ(モード切替手段)
5 第2クラッチ(摩擦要素)
6 ディファレンシャルギア
7 タイヤ(駆動輪)
8 インバータ
9 バッテリ
10 エンジン回転センサ
11 MG回転センサ
12 AT入力回転センサ
13 AT出力回転センサ
14,15 ソレノイドバルブ
16 SOCセンサ
17 アクセル開度センサ
20 統合コントローラ
21 エンジンコントローラ
22 モータコントローラ
23 ブレーキ油圧センサ
【特許請求の範囲】
【請求項1】
エンジンと、
モータと、
前記エンジンと前記モータの連結部に設けられ、前記エンジンと前記モータを駆動源とするハイブリッド車モードと、前記モータを駆動源とする電気自動車モードと、を切り替えるモード切替手段と、
前記モータと駆動輪の間に介装され、エンジン始動要求に基づく前記電気自動車モードから前記ハイブリッド車モードへのモード遷移時、スリップ締結される摩擦要素と、
エンジン始動要求時の前記摩擦要素の締結トルクである始動要求時トルクが、前記摩擦要素のトルク抜けによるショック非発生トルク以下のときには、前記始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、前記モード遷移時の前記摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定するエンジン始動制御手段と、
を備えることを特徴とするハイブリッド車両の制御手段。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記始動要求時トルクが前記ショック非発生トルクより大きいときには、前記モード遷移時トルクを第1トルクに設定し、前記始動要求時トルクが前記ショック非発生トルク以下のときには、前記モード遷移時トルクを、前記第1トルクよりも小さい値である第2トルクに設定することを特徴とするハイブリッド車両の制御手段。
【請求項3】
請求項1又は請求項2に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、車両停止時、前記モード遷移時トルクを前記第2トルクに設定することを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項1から請求項3のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、ブレーキ作動時、前記モード遷移時トルクを前記第2トルクに設定することを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1から請求項4のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記モード遷移時トルクを前記第2トルクに設定したときの前記摩擦要素への入力トルクの絶対値を、前記モード遷移時トルクを前記第1トルクに設定したときの前記摩擦要素への入力トルクの絶対値に比べて、小さい値に設定することを特徴とするハイブリッド車両の制御装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記モード遷移時トルクを前記第2トルクに設定したときの前記摩擦要素への入力トルクの変化率を、前記モード遷移時トルクを前記第1トルクに設定したときの前記摩擦要素への入力トルクの変化率に比べて、小さい値に設定することを特徴とするハイブリッド車両の制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記ショック非発生トルクの値を、走行レンジに応じて設定することを特徴とするハイブリッド車両の制御装置。
【請求項1】
エンジンと、
モータと、
前記エンジンと前記モータの連結部に設けられ、前記エンジンと前記モータを駆動源とするハイブリッド車モードと、前記モータを駆動源とする電気自動車モードと、を切り替えるモード切替手段と、
前記モータと駆動輪の間に介装され、エンジン始動要求に基づく前記電気自動車モードから前記ハイブリッド車モードへのモード遷移時、スリップ締結される摩擦要素と、
エンジン始動要求時の前記摩擦要素の締結トルクである始動要求時トルクが、前記摩擦要素のトルク抜けによるショック非発生トルク以下のときには、前記始動要求時トルクが前記ショック非発生トルクよりも大きいときに比べて、前記モード遷移時の前記摩擦要素の締結トルクであるモード遷移時トルクを小さい値に設定するエンジン始動制御手段と、
を備えることを特徴とするハイブリッド車両の制御手段。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記始動要求時トルクが前記ショック非発生トルクより大きいときには、前記モード遷移時トルクを第1トルクに設定し、前記始動要求時トルクが前記ショック非発生トルク以下のときには、前記モード遷移時トルクを、前記第1トルクよりも小さい値である第2トルクに設定することを特徴とするハイブリッド車両の制御手段。
【請求項3】
請求項1又は請求項2に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、車両停止時、前記モード遷移時トルクを前記第2トルクに設定することを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項1から請求項3のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、ブレーキ作動時、前記モード遷移時トルクを前記第2トルクに設定することを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1から請求項4のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記モード遷移時トルクを前記第2トルクに設定したときの前記摩擦要素への入力トルクの絶対値を、前記モード遷移時トルクを前記第1トルクに設定したときの前記摩擦要素への入力トルクの絶対値に比べて、小さい値に設定することを特徴とするハイブリッド車両の制御装置。
【請求項6】
請求項1から請求項5のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記モード遷移時トルクを前記第2トルクに設定したときの前記摩擦要素への入力トルクの変化率を、前記モード遷移時トルクを前記第1トルクに設定したときの前記摩擦要素への入力トルクの変化率に比べて、小さい値に設定することを特徴とするハイブリッド車両の制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載されたハイブリッド車両の制御装置において、
前記エンジン始動制御手段は、前記ショック非発生トルクの値を、走行レンジに応じて設定することを特徴とするハイブリッド車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−153320(P2012−153320A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−16213(P2011−16213)
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月28日(2011.1.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]