
ハイブリッド車両の制御装置
【課題】マニュアルクラッチシステムを備えたハイブリッド車両であっても電気走行モードを実行させることができるハイブリッド車両の制御装置を提供する。
【解決手段】本発明の制御装置は、エンジン2を停止させた状態でモータ・ジェネレータ3を走行用駆動源とする電気走行モードと、エンジン2を走行用駆動源とするハイブリッド走行モードとを車両1に実行させることができ、ハイブリッド走行モードの実行中にマニュアルトランスミッション7による変速のためのクラッチ操作に合わせて、車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に電気走行モードを車両に実行させる。
【解決手段】本発明の制御装置は、エンジン2を停止させた状態でモータ・ジェネレータ3を走行用駆動源とする電気走行モードと、エンジン2を走行用駆動源とするハイブリッド走行モードとを車両1に実行させることができ、ハイブリッド走行モードの実行中にマニュアルトランスミッション7による変速のためのクラッチ操作に合わせて、車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に電気走行モードを車両に実行させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムを備えたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
油圧回路に設けられた複数の電磁弁を有し、車両の変速時にいずれかの電磁弁をONしてクラッチを解放し、変速が完了したらその他複数の電磁弁のONとOFFとを組み合わせてクラッチを係合させるクラッチの自動断続装置が知られている(特許文献1)。その他、本発明に関連する先行技術文献として特許文献2及び3が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−136832号公報
【特許文献2】特開2009−107502号公報
【特許文献3】特開2009−96404号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マニュアルクラッチシステムを備えたハイブリッド車両においては、クラッチペダル操作が運転者によって行われるが、エンジンが停止した状態で電気走行モードに移行する前提として、クラッチが解放されることによって動力伝達経路からエンジンが切り離されている必要がある。しかし、クラッチペダル操作が運転者によって任意に行われるから電気走行モードを適切に実行させることができない。
【0005】
そこで、本発明は、マニュアルクラッチシステムを備えたハイブリッド車両であっても電気走行モードを実行させることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムによって前記エンジンと前記電動機との動力伝達経路を断続でき、かつマニュアルトランスミッションによって変速できるハイブリッド車両に適用されるハイブリッド車両の制御装置において、前記エンジンを停止させた状態で前記電動機を走行用駆動源とする電気走行モードと、前記エンジンを走行用駆動源とするハイブリッド走行モードとを前記車両に実行させる走行モード制御手段を備え、前記走行モード制御手段は、前記ハイブリッド走行モードの実行中に前記マニュアルトランスミッションによる変速のためのクラッチ操作に合わせて、前記マニュアルトランスミッションによる変速完了後に、車速及び負荷で規定される前記車両の動作点が車速及び負荷で規定されて前記電気走行モードを実行できる電気走行モード実行可能領域内に収まることが予測される場合に前記電気走行モードを前記車両に実行させるものである(請求項1)。
【0007】
この制御装置によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。
【0008】
本発明の制御装置の一態様において、前記走行モード制御手段は、前記動作点が、前記電気走行モード実行可能領域外となることが予測される場合に前記ハイブリッド走行モードを前記車両に実行させてもよい(請求項2)。この態様によれば、車両の動作点が電気走行モード実行可能領域外となることが予測される場合にハイブリッド走行モードが実行されるため、電気走行モードへ移行することによって駆動力が不足する事態を回避できる。
【0009】
本発明の制御装置の一態様において、前記クラッチ操作が前記マニュアルトランスミッションによるアップシフトのためのクラッチ操作でもよい(請求項3)。アップシフトの場合は負荷が低減するため、アップシフトに伴うクラッチ操作に合わせて電気走行モードへ移行できる機会が多くなる。従って、電気走行モードへの移行によって燃費が向上する。
【0010】
本発明の制御装置の一態様において、前記マニュアルクラッチシステムは、前記動力伝達経路内に設けられたクラッチ本体と、運転者にて操作されるクラッチペダルと、供給された油圧に応じて前記クラッチ本体を解放操作するレリーズシリンダと、前記クラッチペダルの操作に応じて前記レリーズシリンダに油圧を供給するマスターシリンダと、前記レリーズシリンダと前記マスターシリンダとを結ぶ油圧回路に設けられ、前記クラッチ操作として前記クラッチペダルの操作が行われた場合に前記レリーズシリンダに供給された油圧を保持でき、かつその保持を解放できる油圧保持手段とを備えており、前記走行モード制御手段は、前記電気走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が保持されるように前記油圧保持手段を制御してもよい(請求項4)。この態様によれば、運転者によるクラッチペダルに対する操作状態に拘らず、クラッチ本体が解放状態に維持された状態で電気走行モードへ移行できるので、電気走行モードの実行中にエンジンを連れ回すことがない。従って、電気走行モードの駆動効率が向上して消費電力が低減する。
【0011】
この態様において、前記走行モード制御手段は、前記ハイブリッド走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が解放されるように前記油圧保持手段を制御してもよい(請求項5)。この場合は、運転者による通常のクラッチ操作及びシフト操作を違和感なく実現できる。
【0012】
本発明の制御装置の一態様において、前記油圧回路は、互いに並列に設けられた二つの経路を含んでおり、前記油圧保持手段として、前記2つの経路の一方の経路に設けられ、作動時に該一方の経路を解放し、かつ非作動時に該一方の経路を遮断する電磁弁と、前記2つの経路の他方の経路に設けられ、前記マスターシリンダから前記レリーズシリンダへ向かう流れを許容し、かつ前記レリーズシリンダから前記マスターシリンダへ向かう流れを阻止するチェック弁とが設けられてもよい(請求項6)。この態様によれば、電磁弁が非作動時の状態でアクセルペダルが操作された場合、一方の経路が電磁弁で遮断されているため、他方の経路に設けられたチェック弁を介してレリーズシリンダへ油圧が供給される。チェック弁はレリーズシリンダからマスターシリンダへ向かう流れを阻止するため、レリーズシリンダの油圧が保持されてクラッチ本体が解放状態に維持される。従って、レリーズシリンダの油圧を保持するために電力が不要であるから消費電力が低減する。
【発明の効果】
【0013】
以上説明したように、本発明のハイブリッド車両の制御装置によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一形態に係る制御装置が適用された車両を模式的に示した全体構成図。
【図2】クラッチペダル周辺を拡大した説明図。
【図3】制御ルーチンの一例を示したフローチャート。
【図4】アップシフトの判定方法を説明する説明図。
【図5】電気走行モードの実行の可否を判定する方法を説明する説明図。
【図6】他の形態のマニュアルクラッチシステムが組み込まれた車両を模式的に示した全体構成図。
【発明を実施するための形態】
【0015】
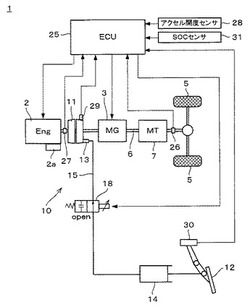
図1に示すように、車両1は内燃機関2及び電動機としてのモータ・ジェネレータ(MG)3が走行用動力源として設けられたいわゆるハイブリッド車両として構成されている。内燃機関(以下、エンジンという。)2は火花点火型の内燃機関として構成されている。エンジン2には車両1の停車時にエンジン2を始動させるためのスタータ2aが設けられている。エンジン2及びMG3は車両1の駆動輪5に至る動力伝達経路6に設けられている。動力伝達経路6にはマニュアルトランスミッション(MT)7が設けられており、MT7は不図示のシフトレバーを介して運転者に操作される。車両1には、エンジン2とMGとの間で動力伝達経路6を断続するマニュアルクラッチシステム10が設けられている。
【0016】
マニュアルクラッチシステム10は、動力伝達経路6内に設けられたクラッチ本体11と、運転者にて操作されるクラッチペダル12と、供給された油圧に応じてクラッチ本体11を解放操作するレリーズシリンダ13と、クラッチペダル12の操作に応じてレリーズシリンダ13に油圧を供給するマスターシリンダ14とを有する。レリーズシリンダ13とマスターシリンダ14とは油圧回路15にて結ばれている。油圧回路15には電磁弁18が設けられている。図示するように、電磁弁18は非励磁時(非作動時)に油圧回路を解放し、かつ励磁時(作動時)に油圧回路を遮断するノーマリーオープン型の電磁弁である。
【0017】
マニュアルクラッチシステム10は、電磁弁18の非作動時に運転者がクラッチペダル12を踏み込む操作を行った場合、油圧回路15が解放されているため、非作動の電磁弁18を介してレリーズシリンダ13へ油圧が供給される。これにより、クラッチ本体11は解放状態となる。レリーズシリンダ13へ油圧が供給された状態で電磁弁18が作動すると油圧回路15が閉鎖される。これにより、クラッチペダル12の操作状態に拘らずレリーズシリンダ13の油圧が保持されてクラッチ本体11が解放状態に維持される。電磁弁18は本発明に係る油圧保持手段として機能する。
【0018】
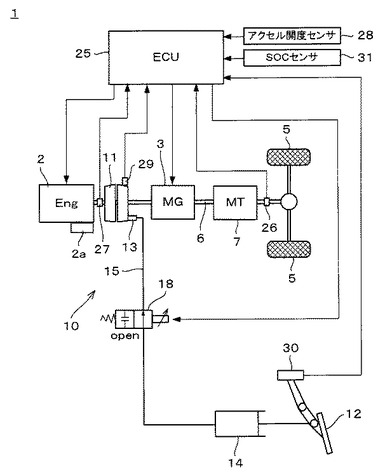
レリーズシリンダ13の油圧が保持されている間に運転者がクラッチペダル12から足を離してもクラッチペダル12が元の位置に戻らない不自然さを解消するため、図2に示すように、クラッチペダル12とマスターシリンダ14とは伸縮可能なプッシュロッド20にて連結されている。プッシュロッド20はクラッチペダル12側の第1部材20aとマスターシリンダ14側の第2部材20bとを有し、これらの部材20a、20bは軸方向に相対移動可能な状態で組み合わされている。これにより、クラッチ本体11が解放状態に保持されている場合に、マスターシリンダ14のピストン14aの位置を変えずにクラッチペダル12を元の位置に戻すことができる。
【0019】
図1に示すように、車両1には、エンジン2、MG3及びマニュアルクラッチシステム10の電磁弁18等の各種の制御対象を制御する電子制御装置(ECU)25が設けられている。ECU25はコンピュータとして構成されており、各種のセンサにて検出された運転パラメータを参照しつつ不図示の記憶装置に保持された所定の制御プログラムに従って上記の制御対象を適正に制御する。ECU25に電気的に接続される各種のセンサとしては、車両1の車速に応じた信号を出力する車速センサ26、エンジン2の回転速度に応じた信号を出力するクランク角センサ27、不図示のアクセルペダルの操作量に応じた信号を出力するアクセル開度センサ28、クラッチ本体11のストローク量に応じた信号を出力するクラッチストロークセンサ29、クラッチペダル12の踏み込み操作に応じた信号を出力するクラッチペダルスイッチ30、及び不図示のバッテリの蓄電率に応じた信号を出力するSOCセンサ31等が設けられている。
【0020】
ECU25が行う制御としては、例えば、車両1の走行モードを、エンジン2を停止させた状態でMG3を走行用駆動源とする電気走行モードと、エンジン2を単独で又はエンジン2及びMG3の両者を走行用駆動源とするハイブリッド走行モードとの間で切り替える走行モード切り替え制御がある。車両1の減速時には、駆動輪5から入力されるトルクを利用してMG3で発電してバッテリを充電する回生制御がECU25にて行われる。
【0021】
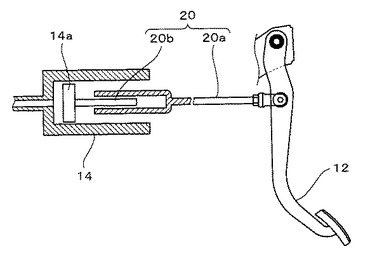
本形態は、ハイブリッド走行モード中のアップシフトに伴うクラッチ操作に合わせて走行モードをハイブリッド走行モードから電気走行モードへ切り替える制御を行う点に特徴がある。図3に示したルーチンのプログラムはECU25に記憶されており、適時に読み出されて所定の演算間隔で繰り返し実行される。
【0022】
図3に示すように、ステップS1ではハイブリッド走行モードの実行中か否かを判定する。ハイブリッド走行モードの実行中である場合はステップS2に進み、そうでいない場合は以後の処理をスキップして今回のルーチンを終了する。
【0023】
ステップS2では運転者によってクラッチ操作が行われたか否かを判定する。具体的には、ECU25はクラッチストロークセンサ29の信号を参照し、クラッチ本体11のストローク量が、クラッチ操作が行われたとみなし得る設定値を超えたか否かによってクラッチ操作の有無を判定する。なお、クラッチペダルスイッチ30の信号に基づいて又はこれを考慮してクラッチ操作の有無を判定することもできる。ステップS2が肯定的判定の場合はステップS3に進み、否定的判定の場合は処理を保留する。
【0024】
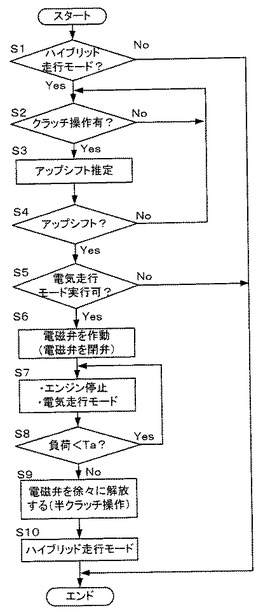
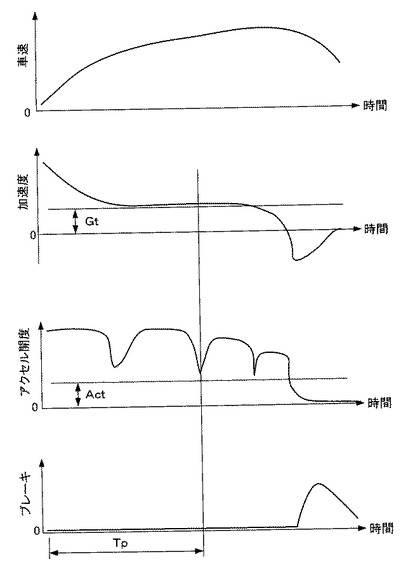
ステップS3では、MT7に対するアップシフトの有無を推定する。その推定は車両1の走行履歴を考慮するとともに加速度及びアクセル開度の値並びにブレーキ操作の有無に基づいて行われる。図4に示すように、(1)加速度が設定値Gtを超え、(2)アクセル開度が設定値Actを超え、かつ(3)ブレーキ操作が行われていない状態が所定時間Tp以上経過したことを条件としてアップシフトが推定される。なお、加速度は車速センサ26の信号に基づいて演算され、アクセル開度はアクセル開度センサ31に基づいて取得され、ブレーキ操作の有無は不図示のブレーキセンサの信号に基づいて取得される。なお、MT7に設けられた不図示のシフトポジションセンサの信号に基づいてアップシフトの有無を判定することも可能である。
【0025】
ステップS4では、ステップS3の推定結果に基づいてアップシフトが行われたか否かを判定する。アップシフトが行われた場合はステップS5に進みそうでない場合はステップS2に戻る。
【0026】
ステップS5では電気走行モードの実行の可否を判定する。その判定は車両1の現在の運転状態を考慮し、その状態で電気走行モードへ移行しても要求駆動力を賄うことができるか否かという観点で行われる。
【0027】
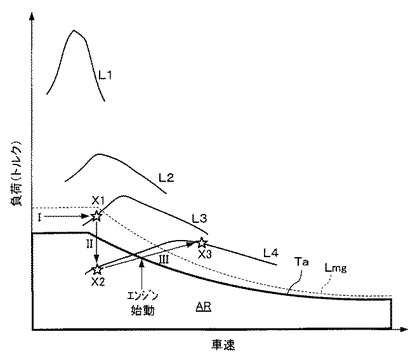
図5に示すように、車両1の車速と負荷とで規定された運転領域には、ハイブリッド走行モード実行中のシフトポジション毎に車速−トルク曲線が描かれる。曲線L1は第1速に、曲線L2は第2速に、曲線L3は第3速に、曲線L4は第4速にそれぞれ対応する。MT7に対してシフト操作が行われる場合、車速と負荷とで規定される車両1の動作点は曲線L1〜L4間を推移する。電気走行モードを実行可能な電気走行モード実行可能領域ARは太線で囲まれた領域である。車両1の動作点が電気走行モード実行可能領域AR内に収まっている限り、エンジン2の駆動力がなくても運転可能である。
【0028】
例えば、ハイブリッド走行モード実行中に矢印Iに示すように車両1が加速し、動作点X1に至り、その動作点X1において第3速から第4速へシフトアップ操作が行われたとする。この場合はクラッチ操作によって矢印IIに示すように車速が一定のまま要求駆動力(トルク)が低下して動作点X2が電気走行モード実行可能領域ARに収まることが予測される。従って、シフトアップ操作後に図5の動作点X2のように電気走行モード実行可能領域ARに収まる場合は、エンジン2を停止して電気走行モードに切り替えても要求駆動力を賄うことができる。電気走行モード実行可能領域ARがMG3の最大出力線Lmgよりも低トルク側に位置するのは電気走行モードからハイブリッド走行モードへ移行する際にMG3のトルクを利用してエンジン2を再始動できるようにするためである。つまり、このように電気走行モード実行可能領域ARが設定されることによって、エンジン2の再始動に要するトルク分の余裕が確保されている。電気走行モード実行可能領域ARの上側境界線に相当する再始動トルクTaはエンジン2の慣性を打ち消しながらクラッチ本体11をショックレスで係合させてエンジン2を再始動するのに必要なトルクとして定義される。
【0029】
車両1の動作点が電気走行モード実行可能領域ARに収まるか否かの判定は、上記の再始動トルクTaを負荷が下回るか否かによって行われる。即ち、負荷<再始動トルクTaが成立した場合、図3のステップS5において電気走行モードの実行が可能であると判定される。車両1の動作点が電気走行モード実行可能領域内に収まることが予測される場合に電気走行モードの実行が可能であると判定されるので、電気走行モードへ移行しても駆動力が不足することがない。ステップS5において電気走行モードの実行が可能であると判定された場合はステップS6に進む。そうでない場合は、以後の処理をスキップし、電磁弁18を非作動のまま油圧回路15を解放状態としてハイブリッド走行モードを維持して今回のルーチンを終える。
【0030】
ステップS6では、電磁弁18を作動させて油圧回路15を閉鎖してレリーズシリンダ13に供給された油圧を保持し、クラッチ本体11を解放状態に維持する。ステップS7では、エンジン2を停止して電気走行モードに移行させる。
【0031】
ステップS8では、負荷が再始動トルクTaよりも下回るか否かを判定する。図5に示すように、負荷が再始動トルクTaを下回っている場合は車両1の動作点が電気走行モード実行可能領域AR内に収まっているので、処理をステップS7に戻して電気走行モードを続行する。図5の矢印IIIで示すように、動作点X2から動作点X3に至る過程で、負荷が再始動トルクTa以上となった場合は動作点が電気走行モード実行可能領域AR外に移るのでステップS9に進む。
【0032】
ステップS9では、クラッチ本体11を滑らせながら伝達トルクが徐々に増加するように、クラッチストロークセンサ29の信号からのフィードバック制御により電磁弁18を制御する。こうした半クラッチ操作によってエンジン2の回転速度を上昇させつつ、エンジン2のファイヤリングを行うことによりエンジン2を始動させる。なお、エンジン2の回転速度がエンジンストールを起さずに自律運転可能なストール回転速度以上になるまで、ステップS9の半クラッチ操作とファイヤリングが続行され、その後クラッチ本体11が完全に係合状態となってステップS10において走行モードが電気走行モードからハイブリッド走行モードに移行する。
【0033】
本形態によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。そして、電気走行モードを実行させる場合に、レリーズシリンダ13の油圧が保持された状態に制御される。そのため、運転者によるクラッチペダル12に対する操作状態に拘らず、クラッチ本体11が解放状態に維持された状態で電気走行モードへ移行できるので、電気走行モードの実行中にエンジンを連れ回すことがない。従って、電気走行モードの駆動効率が向上して消費電力が低減する。また、アップシフトの場合は負荷が低減するため、アップシフトに伴うクラッチ操作に合わせて電気走行モードへ移行できる機会が多くなる。従って、電気走行モードへの移行によって燃費が向上する。
【0034】
上記形態において、ECU25は図3の制御ルーチンを実行することにより本発明の制御装置として機能するとともに、本発明の走行モード制御手段として機能する。但し、本発明は上記形態に限定されず、本発明の要旨の範囲内において種々の形態にて実施できる。本発明の制御装置が適用可能な車両としては図1の形態に限らない。
【0035】
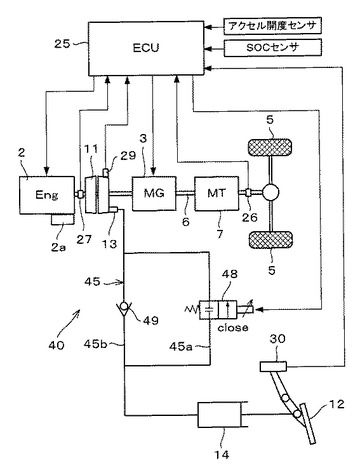
例えば、図6に示すように、図1の形態とは異なる油圧回路を持つマニュアルクラッチシステム40を備えた車両に対して本発明の制御装置を適用することも可能である。図6のマニュアルクラッチシステム40は油圧回路45を有している。油圧回路45は互いに並列に配置された第1経路45aと第2経路45bとを含む。第1経路45aには電磁弁48が、第2経路45bにはチェック弁49がそれぞれ設けられている。電磁弁48及びチェック弁49は本発明に係る油圧保持手段として機能する。図示するように、電磁弁48は励磁時(作動時)に第1経路45aを解放し、かつ非励磁時(非作動時)に第1経路45aを遮断するノーマリークローズ型の電磁弁である。チェック弁49はマスターシリンダ14からレリーズシリンダ13に向かう流れを許容し、その反対向きの流れ、即ちレリーズシリンダ13からマスターシリンダ14へ向かう流れを阻止する。第1経路45aは本発明に係る一方の経路に、第2経路45bは本発明に係る他方の経路にそれぞれ相当する。
【0036】
マニュアルクラッチシステム40は、電磁弁48の非作動時に運転者がクラッチペダル12を踏み込む操作を行った場合、第1経路45aが電磁弁48で遮断されているため、第2経路45bに設けられたチェック弁49を介してレリーズシリンダ13へ油圧が供給される。これにより、クラッチ本体11は解放状態となる。チェック弁49はレリーズシリンダ13からマスターシリンダ14へ向かう流れを阻止するため、クラッチペダル12の操作状態に拘らずレリーズシリンダ13の油圧が保持されてクラッチ本体11が解放状態に維持される。従って、レリーズシリンダ13の油圧を保持するために電力が不要であるから消費電力が低減する。図6の形態の車両の場合、電磁弁48に対する制御がレリーズシリンダ13の油圧解放時に通電する制御となることを除き、図3の内容と同じ制御を行うことができ同様の効果を発揮できる。
【0037】
電動機はクラッチ本体よりも出力側に設けられていればよく、その搭載箇所に制限はない。例えば、電動機は、駆動輪が連結される差動機構や、駆動輪と差動機構との間に設けられてもよい。更に、電動機はインホイールモータとして駆動輪の内部に設けられてもよい。
【符号の説明】
【0038】
1 車両
2 エンジン
3 モータ・ジェネレータ(電動機)
6 動力伝達経路
7 マニュアルトランスミッション
10、40 マニュアルクラッチシステム
11 クラッチ本体
12 クラッチペダル
13 レリーズシリンダ
14 マスターシリンダ
15、45 油圧回路
15a、45a 第1経路(一方の経路)
15b、45b 第2経路(他方の経路)
18、48 電磁弁(油圧保持手段)
19、49 チェック弁(油圧保持手段)
25 ECU(制御装置、走行モード制御手段)
【技術分野】
【0001】
本発明は、エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムを備えたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
油圧回路に設けられた複数の電磁弁を有し、車両の変速時にいずれかの電磁弁をONしてクラッチを解放し、変速が完了したらその他複数の電磁弁のONとOFFとを組み合わせてクラッチを係合させるクラッチの自動断続装置が知られている(特許文献1)。その他、本発明に関連する先行技術文献として特許文献2及び3が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−136832号公報
【特許文献2】特開2009−107502号公報
【特許文献3】特開2009−96404号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
マニュアルクラッチシステムを備えたハイブリッド車両においては、クラッチペダル操作が運転者によって行われるが、エンジンが停止した状態で電気走行モードに移行する前提として、クラッチが解放されることによって動力伝達経路からエンジンが切り離されている必要がある。しかし、クラッチペダル操作が運転者によって任意に行われるから電気走行モードを適切に実行させることができない。
【0005】
そこで、本発明は、マニュアルクラッチシステムを備えたハイブリッド車両であっても電気走行モードを実行させることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムによって前記エンジンと前記電動機との動力伝達経路を断続でき、かつマニュアルトランスミッションによって変速できるハイブリッド車両に適用されるハイブリッド車両の制御装置において、前記エンジンを停止させた状態で前記電動機を走行用駆動源とする電気走行モードと、前記エンジンを走行用駆動源とするハイブリッド走行モードとを前記車両に実行させる走行モード制御手段を備え、前記走行モード制御手段は、前記ハイブリッド走行モードの実行中に前記マニュアルトランスミッションによる変速のためのクラッチ操作に合わせて、前記マニュアルトランスミッションによる変速完了後に、車速及び負荷で規定される前記車両の動作点が車速及び負荷で規定されて前記電気走行モードを実行できる電気走行モード実行可能領域内に収まることが予測される場合に前記電気走行モードを前記車両に実行させるものである(請求項1)。
【0007】
この制御装置によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。
【0008】
本発明の制御装置の一態様において、前記走行モード制御手段は、前記動作点が、前記電気走行モード実行可能領域外となることが予測される場合に前記ハイブリッド走行モードを前記車両に実行させてもよい(請求項2)。この態様によれば、車両の動作点が電気走行モード実行可能領域外となることが予測される場合にハイブリッド走行モードが実行されるため、電気走行モードへ移行することによって駆動力が不足する事態を回避できる。
【0009】
本発明の制御装置の一態様において、前記クラッチ操作が前記マニュアルトランスミッションによるアップシフトのためのクラッチ操作でもよい(請求項3)。アップシフトの場合は負荷が低減するため、アップシフトに伴うクラッチ操作に合わせて電気走行モードへ移行できる機会が多くなる。従って、電気走行モードへの移行によって燃費が向上する。
【0010】
本発明の制御装置の一態様において、前記マニュアルクラッチシステムは、前記動力伝達経路内に設けられたクラッチ本体と、運転者にて操作されるクラッチペダルと、供給された油圧に応じて前記クラッチ本体を解放操作するレリーズシリンダと、前記クラッチペダルの操作に応じて前記レリーズシリンダに油圧を供給するマスターシリンダと、前記レリーズシリンダと前記マスターシリンダとを結ぶ油圧回路に設けられ、前記クラッチ操作として前記クラッチペダルの操作が行われた場合に前記レリーズシリンダに供給された油圧を保持でき、かつその保持を解放できる油圧保持手段とを備えており、前記走行モード制御手段は、前記電気走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が保持されるように前記油圧保持手段を制御してもよい(請求項4)。この態様によれば、運転者によるクラッチペダルに対する操作状態に拘らず、クラッチ本体が解放状態に維持された状態で電気走行モードへ移行できるので、電気走行モードの実行中にエンジンを連れ回すことがない。従って、電気走行モードの駆動効率が向上して消費電力が低減する。
【0011】
この態様において、前記走行モード制御手段は、前記ハイブリッド走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が解放されるように前記油圧保持手段を制御してもよい(請求項5)。この場合は、運転者による通常のクラッチ操作及びシフト操作を違和感なく実現できる。
【0012】
本発明の制御装置の一態様において、前記油圧回路は、互いに並列に設けられた二つの経路を含んでおり、前記油圧保持手段として、前記2つの経路の一方の経路に設けられ、作動時に該一方の経路を解放し、かつ非作動時に該一方の経路を遮断する電磁弁と、前記2つの経路の他方の経路に設けられ、前記マスターシリンダから前記レリーズシリンダへ向かう流れを許容し、かつ前記レリーズシリンダから前記マスターシリンダへ向かう流れを阻止するチェック弁とが設けられてもよい(請求項6)。この態様によれば、電磁弁が非作動時の状態でアクセルペダルが操作された場合、一方の経路が電磁弁で遮断されているため、他方の経路に設けられたチェック弁を介してレリーズシリンダへ油圧が供給される。チェック弁はレリーズシリンダからマスターシリンダへ向かう流れを阻止するため、レリーズシリンダの油圧が保持されてクラッチ本体が解放状態に維持される。従って、レリーズシリンダの油圧を保持するために電力が不要であるから消費電力が低減する。
【発明の効果】
【0013】
以上説明したように、本発明のハイブリッド車両の制御装置によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一形態に係る制御装置が適用された車両を模式的に示した全体構成図。
【図2】クラッチペダル周辺を拡大した説明図。
【図3】制御ルーチンの一例を示したフローチャート。
【図4】アップシフトの判定方法を説明する説明図。
【図5】電気走行モードの実行の可否を判定する方法を説明する説明図。
【図6】他の形態のマニュアルクラッチシステムが組み込まれた車両を模式的に示した全体構成図。
【発明を実施するための形態】
【0015】
図1に示すように、車両1は内燃機関2及び電動機としてのモータ・ジェネレータ(MG)3が走行用動力源として設けられたいわゆるハイブリッド車両として構成されている。内燃機関(以下、エンジンという。)2は火花点火型の内燃機関として構成されている。エンジン2には車両1の停車時にエンジン2を始動させるためのスタータ2aが設けられている。エンジン2及びMG3は車両1の駆動輪5に至る動力伝達経路6に設けられている。動力伝達経路6にはマニュアルトランスミッション(MT)7が設けられており、MT7は不図示のシフトレバーを介して運転者に操作される。車両1には、エンジン2とMGとの間で動力伝達経路6を断続するマニュアルクラッチシステム10が設けられている。
【0016】
マニュアルクラッチシステム10は、動力伝達経路6内に設けられたクラッチ本体11と、運転者にて操作されるクラッチペダル12と、供給された油圧に応じてクラッチ本体11を解放操作するレリーズシリンダ13と、クラッチペダル12の操作に応じてレリーズシリンダ13に油圧を供給するマスターシリンダ14とを有する。レリーズシリンダ13とマスターシリンダ14とは油圧回路15にて結ばれている。油圧回路15には電磁弁18が設けられている。図示するように、電磁弁18は非励磁時(非作動時)に油圧回路を解放し、かつ励磁時(作動時)に油圧回路を遮断するノーマリーオープン型の電磁弁である。
【0017】
マニュアルクラッチシステム10は、電磁弁18の非作動時に運転者がクラッチペダル12を踏み込む操作を行った場合、油圧回路15が解放されているため、非作動の電磁弁18を介してレリーズシリンダ13へ油圧が供給される。これにより、クラッチ本体11は解放状態となる。レリーズシリンダ13へ油圧が供給された状態で電磁弁18が作動すると油圧回路15が閉鎖される。これにより、クラッチペダル12の操作状態に拘らずレリーズシリンダ13の油圧が保持されてクラッチ本体11が解放状態に維持される。電磁弁18は本発明に係る油圧保持手段として機能する。
【0018】
レリーズシリンダ13の油圧が保持されている間に運転者がクラッチペダル12から足を離してもクラッチペダル12が元の位置に戻らない不自然さを解消するため、図2に示すように、クラッチペダル12とマスターシリンダ14とは伸縮可能なプッシュロッド20にて連結されている。プッシュロッド20はクラッチペダル12側の第1部材20aとマスターシリンダ14側の第2部材20bとを有し、これらの部材20a、20bは軸方向に相対移動可能な状態で組み合わされている。これにより、クラッチ本体11が解放状態に保持されている場合に、マスターシリンダ14のピストン14aの位置を変えずにクラッチペダル12を元の位置に戻すことができる。
【0019】
図1に示すように、車両1には、エンジン2、MG3及びマニュアルクラッチシステム10の電磁弁18等の各種の制御対象を制御する電子制御装置(ECU)25が設けられている。ECU25はコンピュータとして構成されており、各種のセンサにて検出された運転パラメータを参照しつつ不図示の記憶装置に保持された所定の制御プログラムに従って上記の制御対象を適正に制御する。ECU25に電気的に接続される各種のセンサとしては、車両1の車速に応じた信号を出力する車速センサ26、エンジン2の回転速度に応じた信号を出力するクランク角センサ27、不図示のアクセルペダルの操作量に応じた信号を出力するアクセル開度センサ28、クラッチ本体11のストローク量に応じた信号を出力するクラッチストロークセンサ29、クラッチペダル12の踏み込み操作に応じた信号を出力するクラッチペダルスイッチ30、及び不図示のバッテリの蓄電率に応じた信号を出力するSOCセンサ31等が設けられている。
【0020】
ECU25が行う制御としては、例えば、車両1の走行モードを、エンジン2を停止させた状態でMG3を走行用駆動源とする電気走行モードと、エンジン2を単独で又はエンジン2及びMG3の両者を走行用駆動源とするハイブリッド走行モードとの間で切り替える走行モード切り替え制御がある。車両1の減速時には、駆動輪5から入力されるトルクを利用してMG3で発電してバッテリを充電する回生制御がECU25にて行われる。
【0021】
本形態は、ハイブリッド走行モード中のアップシフトに伴うクラッチ操作に合わせて走行モードをハイブリッド走行モードから電気走行モードへ切り替える制御を行う点に特徴がある。図3に示したルーチンのプログラムはECU25に記憶されており、適時に読み出されて所定の演算間隔で繰り返し実行される。
【0022】
図3に示すように、ステップS1ではハイブリッド走行モードの実行中か否かを判定する。ハイブリッド走行モードの実行中である場合はステップS2に進み、そうでいない場合は以後の処理をスキップして今回のルーチンを終了する。
【0023】
ステップS2では運転者によってクラッチ操作が行われたか否かを判定する。具体的には、ECU25はクラッチストロークセンサ29の信号を参照し、クラッチ本体11のストローク量が、クラッチ操作が行われたとみなし得る設定値を超えたか否かによってクラッチ操作の有無を判定する。なお、クラッチペダルスイッチ30の信号に基づいて又はこれを考慮してクラッチ操作の有無を判定することもできる。ステップS2が肯定的判定の場合はステップS3に進み、否定的判定の場合は処理を保留する。
【0024】
ステップS3では、MT7に対するアップシフトの有無を推定する。その推定は車両1の走行履歴を考慮するとともに加速度及びアクセル開度の値並びにブレーキ操作の有無に基づいて行われる。図4に示すように、(1)加速度が設定値Gtを超え、(2)アクセル開度が設定値Actを超え、かつ(3)ブレーキ操作が行われていない状態が所定時間Tp以上経過したことを条件としてアップシフトが推定される。なお、加速度は車速センサ26の信号に基づいて演算され、アクセル開度はアクセル開度センサ31に基づいて取得され、ブレーキ操作の有無は不図示のブレーキセンサの信号に基づいて取得される。なお、MT7に設けられた不図示のシフトポジションセンサの信号に基づいてアップシフトの有無を判定することも可能である。
【0025】
ステップS4では、ステップS3の推定結果に基づいてアップシフトが行われたか否かを判定する。アップシフトが行われた場合はステップS5に進みそうでない場合はステップS2に戻る。
【0026】
ステップS5では電気走行モードの実行の可否を判定する。その判定は車両1の現在の運転状態を考慮し、その状態で電気走行モードへ移行しても要求駆動力を賄うことができるか否かという観点で行われる。
【0027】
図5に示すように、車両1の車速と負荷とで規定された運転領域には、ハイブリッド走行モード実行中のシフトポジション毎に車速−トルク曲線が描かれる。曲線L1は第1速に、曲線L2は第2速に、曲線L3は第3速に、曲線L4は第4速にそれぞれ対応する。MT7に対してシフト操作が行われる場合、車速と負荷とで規定される車両1の動作点は曲線L1〜L4間を推移する。電気走行モードを実行可能な電気走行モード実行可能領域ARは太線で囲まれた領域である。車両1の動作点が電気走行モード実行可能領域AR内に収まっている限り、エンジン2の駆動力がなくても運転可能である。
【0028】
例えば、ハイブリッド走行モード実行中に矢印Iに示すように車両1が加速し、動作点X1に至り、その動作点X1において第3速から第4速へシフトアップ操作が行われたとする。この場合はクラッチ操作によって矢印IIに示すように車速が一定のまま要求駆動力(トルク)が低下して動作点X2が電気走行モード実行可能領域ARに収まることが予測される。従って、シフトアップ操作後に図5の動作点X2のように電気走行モード実行可能領域ARに収まる場合は、エンジン2を停止して電気走行モードに切り替えても要求駆動力を賄うことができる。電気走行モード実行可能領域ARがMG3の最大出力線Lmgよりも低トルク側に位置するのは電気走行モードからハイブリッド走行モードへ移行する際にMG3のトルクを利用してエンジン2を再始動できるようにするためである。つまり、このように電気走行モード実行可能領域ARが設定されることによって、エンジン2の再始動に要するトルク分の余裕が確保されている。電気走行モード実行可能領域ARの上側境界線に相当する再始動トルクTaはエンジン2の慣性を打ち消しながらクラッチ本体11をショックレスで係合させてエンジン2を再始動するのに必要なトルクとして定義される。
【0029】
車両1の動作点が電気走行モード実行可能領域ARに収まるか否かの判定は、上記の再始動トルクTaを負荷が下回るか否かによって行われる。即ち、負荷<再始動トルクTaが成立した場合、図3のステップS5において電気走行モードの実行が可能であると判定される。車両1の動作点が電気走行モード実行可能領域内に収まることが予測される場合に電気走行モードの実行が可能であると判定されるので、電気走行モードへ移行しても駆動力が不足することがない。ステップS5において電気走行モードの実行が可能であると判定された場合はステップS6に進む。そうでない場合は、以後の処理をスキップし、電磁弁18を非作動のまま油圧回路15を解放状態としてハイブリッド走行モードを維持して今回のルーチンを終える。
【0030】
ステップS6では、電磁弁18を作動させて油圧回路15を閉鎖してレリーズシリンダ13に供給された油圧を保持し、クラッチ本体11を解放状態に維持する。ステップS7では、エンジン2を停止して電気走行モードに移行させる。
【0031】
ステップS8では、負荷が再始動トルクTaよりも下回るか否かを判定する。図5に示すように、負荷が再始動トルクTaを下回っている場合は車両1の動作点が電気走行モード実行可能領域AR内に収まっているので、処理をステップS7に戻して電気走行モードを続行する。図5の矢印IIIで示すように、動作点X2から動作点X3に至る過程で、負荷が再始動トルクTa以上となった場合は動作点が電気走行モード実行可能領域AR外に移るのでステップS9に進む。
【0032】
ステップS9では、クラッチ本体11を滑らせながら伝達トルクが徐々に増加するように、クラッチストロークセンサ29の信号からのフィードバック制御により電磁弁18を制御する。こうした半クラッチ操作によってエンジン2の回転速度を上昇させつつ、エンジン2のファイヤリングを行うことによりエンジン2を始動させる。なお、エンジン2の回転速度がエンジンストールを起さずに自律運転可能なストール回転速度以上になるまで、ステップS9の半クラッチ操作とファイヤリングが続行され、その後クラッチ本体11が完全に係合状態となってステップS10において走行モードが電気走行モードからハイブリッド走行モードに移行する。
【0033】
本形態によれば、ハイブリッド走行モードの実行中に変速のためのクラッチ操作が行われ、マニュアルトランスミッションによる変速完了後に車両の動作点が電気走行モード実行可能領域内に収まることが予測される場合に、そのクラッチ操作に合わせて電気走行モードを車両に実行させることができる。そして、電気走行モードを実行させる場合に、レリーズシリンダ13の油圧が保持された状態に制御される。そのため、運転者によるクラッチペダル12に対する操作状態に拘らず、クラッチ本体11が解放状態に維持された状態で電気走行モードへ移行できるので、電気走行モードの実行中にエンジンを連れ回すことがない。従って、電気走行モードの駆動効率が向上して消費電力が低減する。また、アップシフトの場合は負荷が低減するため、アップシフトに伴うクラッチ操作に合わせて電気走行モードへ移行できる機会が多くなる。従って、電気走行モードへの移行によって燃費が向上する。
【0034】
上記形態において、ECU25は図3の制御ルーチンを実行することにより本発明の制御装置として機能するとともに、本発明の走行モード制御手段として機能する。但し、本発明は上記形態に限定されず、本発明の要旨の範囲内において種々の形態にて実施できる。本発明の制御装置が適用可能な車両としては図1の形態に限らない。
【0035】
例えば、図6に示すように、図1の形態とは異なる油圧回路を持つマニュアルクラッチシステム40を備えた車両に対して本発明の制御装置を適用することも可能である。図6のマニュアルクラッチシステム40は油圧回路45を有している。油圧回路45は互いに並列に配置された第1経路45aと第2経路45bとを含む。第1経路45aには電磁弁48が、第2経路45bにはチェック弁49がそれぞれ設けられている。電磁弁48及びチェック弁49は本発明に係る油圧保持手段として機能する。図示するように、電磁弁48は励磁時(作動時)に第1経路45aを解放し、かつ非励磁時(非作動時)に第1経路45aを遮断するノーマリークローズ型の電磁弁である。チェック弁49はマスターシリンダ14からレリーズシリンダ13に向かう流れを許容し、その反対向きの流れ、即ちレリーズシリンダ13からマスターシリンダ14へ向かう流れを阻止する。第1経路45aは本発明に係る一方の経路に、第2経路45bは本発明に係る他方の経路にそれぞれ相当する。
【0036】
マニュアルクラッチシステム40は、電磁弁48の非作動時に運転者がクラッチペダル12を踏み込む操作を行った場合、第1経路45aが電磁弁48で遮断されているため、第2経路45bに設けられたチェック弁49を介してレリーズシリンダ13へ油圧が供給される。これにより、クラッチ本体11は解放状態となる。チェック弁49はレリーズシリンダ13からマスターシリンダ14へ向かう流れを阻止するため、クラッチペダル12の操作状態に拘らずレリーズシリンダ13の油圧が保持されてクラッチ本体11が解放状態に維持される。従って、レリーズシリンダ13の油圧を保持するために電力が不要であるから消費電力が低減する。図6の形態の車両の場合、電磁弁48に対する制御がレリーズシリンダ13の油圧解放時に通電する制御となることを除き、図3の内容と同じ制御を行うことができ同様の効果を発揮できる。
【0037】
電動機はクラッチ本体よりも出力側に設けられていればよく、その搭載箇所に制限はない。例えば、電動機は、駆動輪が連結される差動機構や、駆動輪と差動機構との間に設けられてもよい。更に、電動機はインホイールモータとして駆動輪の内部に設けられてもよい。
【符号の説明】
【0038】
1 車両
2 エンジン
3 モータ・ジェネレータ(電動機)
6 動力伝達経路
7 マニュアルトランスミッション
10、40 マニュアルクラッチシステム
11 クラッチ本体
12 クラッチペダル
13 レリーズシリンダ
14 マスターシリンダ
15、45 油圧回路
15a、45a 第1経路(一方の経路)
15b、45b 第2経路(他方の経路)
18、48 電磁弁(油圧保持手段)
19、49 チェック弁(油圧保持手段)
25 ECU(制御装置、走行モード制御手段)
【特許請求の範囲】
【請求項1】
エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムによって前記エンジンと前記電動機との動力伝達経路を断続でき、かつマニュアルトランスミッションによって変速できるハイブリッド車両に適用されるハイブリッド車両の制御装置において、
前記エンジンを停止させた状態で前記電動機を走行用駆動源とする電気走行モードと、前記エンジンを走行用駆動源とするハイブリッド走行モードとを前記車両に実行させる走行モード制御手段を備え、
前記走行モード制御手段は、前記ハイブリッド走行モードの実行中に前記マニュアルトランスミッションによる変速のためのクラッチ操作に合わせて、前記マニュアルトランスミッションによる変速完了後に、車速及び負荷で規定される前記車両の動作点が車速及び負荷で規定されて前記電気走行モードを実行できる電気走行モード実行可能領域内に収まることが予測される場合に前記電気走行モードを前記車両に実行させる、
ことを特徴とするハイブリッド車両の制御装置。
【請求項2】
前記走行モード制御手段は、前記動作点が、前記電気走行モード実行可能領域外となることが予測される場合に前記ハイブリッド走行モードを前記車両に実行させる、請求項1に記載の制御装置。
【請求項3】
前記クラッチ操作が前記マニュアルトランスミッションによるアップシフト変速のためのクラッチ操作である請求項1又は2に記載の制御装置。
【請求項4】
前記マニュアルクラッチシステムは、前記動力伝達経路内に設けられたクラッチ本体と、運転者にて操作されるクラッチペダルと、供給された油圧に応じて前記クラッチ本体を解放操作するレリーズシリンダと、前記クラッチペダルの操作に応じて前記レリーズシリンダに油圧を供給するマスターシリンダと、前記レリーズシリンダと前記マスターシリンダとを結ぶ油圧回路に設けられ、前記クラッチ操作として前記クラッチペダルの操作が行われた場合に前記レリーズシリンダに供給された油圧を保持でき、かつその保持を解放できる油圧保持手段とを備えており、
前記走行モード制御手段は、前記電気走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が保持されるように前記油圧保持手段を制御する、請求項1〜3のいずれか一項に記載の制御装置。
【請求項5】
前記走行モード制御手段は、前記ハイブリッド走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が解放されるように前記油圧保持手段を制御する、請求項4に記載の制御装置。
【請求項6】
前記油圧回路は、互いに並列に設けられた二つの経路を含んでおり、
前記油圧保持手段として、前記2つの経路の一方の経路に設けられ、作動時に該一方の経路を解放し、かつ非作動時に該一方の経路を遮断する電磁弁と、前記2つの経路の他方の経路に設けられ、前記マスターシリンダから前記レリーズシリンダへ向かう流れを許容し、かつ前記レリーズシリンダから前記マスターシリンダへ向かう流れを阻止するチェック弁とが設けられている、請求項4又は5に記載の制御装置。
【請求項1】
エンジン及び電動機を走行用駆動源として含み、マニュアルクラッチシステムによって前記エンジンと前記電動機との動力伝達経路を断続でき、かつマニュアルトランスミッションによって変速できるハイブリッド車両に適用されるハイブリッド車両の制御装置において、
前記エンジンを停止させた状態で前記電動機を走行用駆動源とする電気走行モードと、前記エンジンを走行用駆動源とするハイブリッド走行モードとを前記車両に実行させる走行モード制御手段を備え、
前記走行モード制御手段は、前記ハイブリッド走行モードの実行中に前記マニュアルトランスミッションによる変速のためのクラッチ操作に合わせて、前記マニュアルトランスミッションによる変速完了後に、車速及び負荷で規定される前記車両の動作点が車速及び負荷で規定されて前記電気走行モードを実行できる電気走行モード実行可能領域内に収まることが予測される場合に前記電気走行モードを前記車両に実行させる、
ことを特徴とするハイブリッド車両の制御装置。
【請求項2】
前記走行モード制御手段は、前記動作点が、前記電気走行モード実行可能領域外となることが予測される場合に前記ハイブリッド走行モードを前記車両に実行させる、請求項1に記載の制御装置。
【請求項3】
前記クラッチ操作が前記マニュアルトランスミッションによるアップシフト変速のためのクラッチ操作である請求項1又は2に記載の制御装置。
【請求項4】
前記マニュアルクラッチシステムは、前記動力伝達経路内に設けられたクラッチ本体と、運転者にて操作されるクラッチペダルと、供給された油圧に応じて前記クラッチ本体を解放操作するレリーズシリンダと、前記クラッチペダルの操作に応じて前記レリーズシリンダに油圧を供給するマスターシリンダと、前記レリーズシリンダと前記マスターシリンダとを結ぶ油圧回路に設けられ、前記クラッチ操作として前記クラッチペダルの操作が行われた場合に前記レリーズシリンダに供給された油圧を保持でき、かつその保持を解放できる油圧保持手段とを備えており、
前記走行モード制御手段は、前記電気走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が保持されるように前記油圧保持手段を制御する、請求項1〜3のいずれか一項に記載の制御装置。
【請求項5】
前記走行モード制御手段は、前記ハイブリッド走行モードを前記車両に実行させる場合に、前記レリーズシリンダに供給された油圧が解放されるように前記油圧保持手段を制御する、請求項4に記載の制御装置。
【請求項6】
前記油圧回路は、互いに並列に設けられた二つの経路を含んでおり、
前記油圧保持手段として、前記2つの経路の一方の経路に設けられ、作動時に該一方の経路を解放し、かつ非作動時に該一方の経路を遮断する電磁弁と、前記2つの経路の他方の経路に設けられ、前記マスターシリンダから前記レリーズシリンダへ向かう流れを許容し、かつ前記レリーズシリンダから前記マスターシリンダへ向かう流れを阻止するチェック弁とが設けられている、請求項4又は5に記載の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−107436(P2013−107436A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252529(P2011−252529)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]