
ハイブリッド車両の制御装置
【課題】変速機の変速時間を短縮しつつシンクロ機構に対する負荷を抑えることができるハイブリッド車両の制御装置を提供する。
【解決手段】本発明の制御装置は、AMT8の変速操作開始時に入力軸10の回転速度が目標回転速度に近づくように、モータ・ジェネレータ3のトルクが切替機構21を介して前記入力軸に伝達可能な状態でモータ・ジェネレータ3を制御し、入力軸10の回転速度と目標回転速度との差が閾値を下回った場合に、モータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断されるように切替機構21を制御し、そのトルク伝達が遮断されてからAMT8の変速操作が開始されるようにAMTを制御する。
【解決手段】本発明の制御装置は、AMT8の変速操作開始時に入力軸10の回転速度が目標回転速度に近づくように、モータ・ジェネレータ3のトルクが切替機構21を介して前記入力軸に伝達可能な状態でモータ・ジェネレータ3を制御し、入力軸10の回転速度と目標回転速度との差が閾値を下回った場合に、モータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断されるように切替機構21を制御し、そのトルク伝達が遮断されてからAMT8の変速操作が開始されるようにAMTを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シンクロ機構を持つ変速機が搭載されたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
シンクロ機構を持つ変速機が搭載されたハイブリッド車両の制御装置として、変速要求に応答して変速機をニュートラルに操作しつつ入力軸の回転速度が目標回転速度となるように電動機を制御するとともに、その電動機の制御によって入力軸の回転速度と目標回転速度との差が所定範囲内に収まった際にニュートラルから所望の変速比に切り替える変速操作を変速機に実行させるものが知られている(特許文献1)。その他、本発明に関連する先行技術文献として特許文献2及び3が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−274510号公報
【特許文献2】特開2010−12927号公報
【特許文献3】特開2003−335152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御装置は、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始される。そのため、変速機の変速操作に要する時間が短縮される。しかし、変速操作の実行時に入力軸と電動機との間のトルク伝達が維持されているので、シンクロ機構への負荷が増加するおそれがある。
【0005】
そこで、本発明は、変速機の変速時間を短縮しつつシンクロ機構に対する負荷を抑えることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、走行用駆動源として設けられたエンジン及び電動機と、変速比の切り替え時の回転速度差を解消するシンクロ機構が設けられ、前記エンジン及び前記電動機のトルクが入力軸を介して入力される変速機と、前記電動機と前記入力軸との間のトルク伝達を断続可能な切替機構とを有するハイブリッド車両に適用され、前記変速機の変速操作開始時に前記入力軸の回転速度が目標回転速度に近づくように、前記電動機のトルクが前記切替機構を介して前記入力軸に伝達可能な状態で前記電動機を制御する電動機制御手段と、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合に、前記電動機と前記入力軸との間のトルク伝達が遮断されるように前記切替機構を制御する切替機構制御手段と、前記切替機構制御手段にて前記電動機と前記入力軸との間のトルク伝達が遮断されてから前記変速機の変速操作が開始されるように前記変速機を制御する変速制御手段と、を備えるものである(請求項1)。
【0007】
この制御装置によれば、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始されるので変速時間が短縮する。しかも、電動機と入力軸との間のトルク伝達が遮断された状態で変速操作の開始されるため、電動機が入力軸から切り離されることによって電動機相当分のイナーシャが低減する。これにより、シンクロ機構に対する負荷を抑えることができる。
【0008】
本発明の制御装置の一態様において、前記切替機構制御手段は、前記車両に対して応答性が要求される状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御してもよい(請求項2)。この態様によれば、応答性が要求される状況では、シンクロ機構を作動させずに変速操作が開始するので応答性を確保できるとともにシンクロ機構の負荷を低減できる。
【0009】
本発明の制御装置の一態様において、前記切替機構制御手段は、前記切替機構の摩耗を回避すべき状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御してもよい(請求項3)。この態様によれば、切替機構の摩耗を回避すべき状況の場合は切替機構の操作頻度が減少するので摩耗の進行を抑えることができる。
【発明の効果】
【0010】
以上説明したように、本発明のハイブリッド車両の制御装置によれば、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始され、しかも変速操作が開始される際には電動機が入力軸から切り離されているので、変速時間を短縮できるとともにシンクロ機構に対する負荷を抑えることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一形態に係る制御装置が適用された車両を模式的に示した全体構成図。
【図2】変速モード設定処理のルーチンの一例を示したフローチャート。
【図3】変速制御の制御ルーチンの一例を示したフローチャート。
【図4】MG切り離しモードの実行結果の一例を示したタイミングチャート。
【図5】回転数同期モードの実行結果の一例を示したタイミングチャート。
【発明を実施するための形態】
【0012】
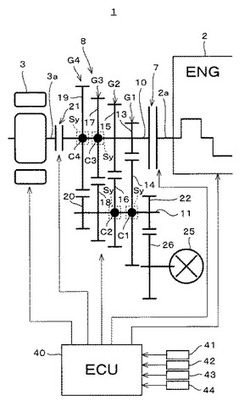
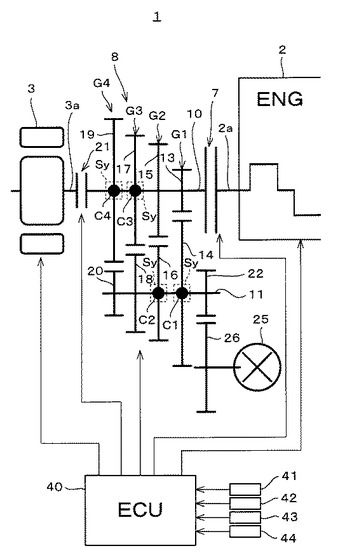
図1に示すように、車両1は内燃機関2及び電動機としてのモータ・ジェネレータ3が走行用動力源として設けられたいわゆるハイブリッド車両として構成されている。内燃機関(以下、エンジンという。)2は火花点火型の内燃機関として構成されている。エンジン2の出力軸2aは、摩擦クラッチ7を介して変速機としてのオートメーテッドトランスミッション(AMT)8と接続されている。摩擦クラッチ7はAMT8の変速操作に合わせて係合操作及び解放操作が行なわれる。
【0013】
AMT8は前進4段の複数の変速段から一つの変速段を選択できる。AMT8による変速段の選択は車両1の車速やアクセル開度に基づいて自動的に行なわれる。また、AMT8がマニュアルモードへ切り替えられることにより、不図示のシフトノブを運転者が操作することによって変速段が選択される。
【0014】
AMT8は、入力軸10と、これと平行に延びている出力軸11と、これら入力軸10と出力軸11との間に設けられた第1〜第4ギア対G1〜G4とを備えている。第1〜第4ギア対G1〜G4は第1速〜第4速に対応する。なお、車両1の後退走行は第1速が選択された状態でモータ・ジェネレータ3が逆転することにより実施される。第1ギア対G1は互いに噛み合う第1ドライブギア13及び第1ドリブンギア14を含む。第2ギア対G2は互いに噛み合う第2ドライブギア15及び第2ドリブンギア16を含む。第3ギア対G3は互いに噛み合う第3ドライブギア17及び第3ドリブンギア18を含む。第4ギア対G4は互いに噛み合う第4ドライブギア19及び第4ドリブンギア20を含む。各ギア対G1〜G4のギア比は、第1ギア対G1、第2ギア対G2、第3ギア対G3、第4ギア対G4の順に小さくなるように設定されている。
【0015】
第1ドライブギア13及び第2ドライブギア15は、それぞれ入力軸10と一体に回転するように入力軸10に設けられている。一方、第3ドライブギア17及び第4ドライブギア19は、それぞれ入力軸10に対して相対回転可能なように入力軸10に設けられている。第1ドリブンギア14及び第2ドリブンギア16は、それぞれ出力軸11に対して相対回転可能なように出力軸11に設けられている。一方、第3ドリブンギア18及び第4ドリブンギア20は、それぞれ出力軸11と一体に回転するように出力軸11に設けられている。
【0016】
AMT8には、上記複数の変速段のいずれか一つを有効化するため、結合装置C1〜C4が設けられている。各結合装置C1〜C4は周知の噛み合い式クラッチとして構成されており、不図示の操作機構にて操作される。各結合装置C1〜C4と入力軸10又は出力軸11との間には各結合装置C1〜C4と入力軸10又は出力軸11との間の回転速度差を解消するように作動するシンクロ機構Syが介在する。シンクロ機構Syは周知のものと同様であるためその構造の詳細な説明は省略する。
【0017】
第1結合装置C1は第1ドリブンギア14を出力軸11に結合させて第1ドリブンギア14と出力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。同様に、第2結合装置C2は第2ドリブンギア16を出力軸11に結合させて第2ドリブンギア16と出力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。また、第3結合装置C3は第3ドライブギア17を入力軸10に結合させて第3ドライブギア17と入力軸10とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。同様に、第4結合装置C4は第4ドライブギア19を入力軸11に結合させて第4ドライブギア19と入力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。AMT8は、これらの結合装置C1〜C4のいずれか一つが係合状態となることによって上記複数の変速段のいずれか一つを有効化できる。
【0018】
モータ・ジェネレータ3とAMT8の入力軸10との間には、これらの間のトルク伝達を断続できる切替機構21が設けられている。切替機構21は例えば摩擦クラッチとして構成されており、不図示のアクチュエータを駆動源としてモータ・ジェネレータ3と入力軸10との間のトルク伝達を維持する係合状態と、これらの間のトルク伝達を遮断する解放状態とを切り替えることができる。
【0019】
出力軸11には出力ギア22が一体回転するように設けられている。出力ギア22は、不図示の駆動輪に連結された差動機構25のケースに設けられたリングギア26と噛み合っている。AMT8から出力されたトルクはリングギア26及び差動機構25を介して左右の駆動輪に伝達される。
【0020】
エンジン2、モータ・ジェネレータ3、摩擦クラッチ7、AMT8及び切替機構21のそれぞれに対する制御は、コンピュータユニットとして構成された電子制御ユニット(ECU)40にて行われている。ECU40は車両1の適正な走行状態を得るための各種制御プログラムを保持している。ECU40は、これらのプログラムを実行することにより上述したエンジン2等の制御対象に対する制御を行っている。ECU40には車両1の走行状態に関係する情報を出力する種々のセンサが接続されている。例えば、入力軸10の回転速度に応じた信号を出力する入力側レゾルバ41、出力軸11の回転速度に応じた信号を出力する出力側レゾルバ42、エンジン2のクランク角に応じた信号を出力するクランク角センサ43、及びアクセル開度に応じた信号を出力するアクセル開度センサ44がECU40に電気的に接続されている。
【0021】
ECU40が行なう制御としては、エンジン2及びモータ・ジェネレータ3を走行用動力源とするハイブリッド走行モードやエンジン2を停止した状態でモータ・ジェネレータ3のみを走行用動力源とする電気走行モード等の各種の走行モードを切り替える走行モード切替制御がある。その走行モード切替制御に付随してエンジン2の停止制御や始動制御が行なわれる。更に、車両1の減速時に駆動輪から入力される動力を利用してモータ・ジェネレータ3で発電する回生制御も行なわれる。以下、ECU40が実行する制御のうち本発明に関連する制御について説明し、その他の制御については説明を省略ないし簡略化する。
【0022】
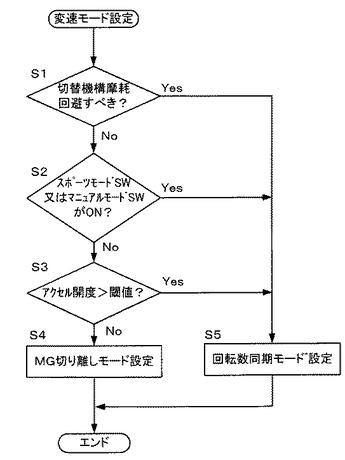
本形態は車両1の走行状態に応じて変速モードを切り替えるAMT8に対する変速制御に特徴がある。図2のルーチンは、シンクロ機構Syを作動させない回転数同期モード又はシンクロ機構Syを作動させつつモータ・ジェネレータ3を切り離すMG切り離しモードのいずれかに変速モードを設定するものである。このルーチンのプログラムはECU40に記憶されており、車両1の走行中に適時に読み出されて所定の演算間隔で繰り返し実行される。
【0023】
ステップS1では、切替機構21の摩耗を回避すべき状況か否かを判定する。その摩耗を回避すべき状況の場合はステップS5に進み、そうでない場合はステップS2に進む。摩耗を回避すべき状況としては切替機構21が摩耗の限界に近づいた場合が該当する。なお、ECU40は切替機構21の作動時間及びその負荷を積算して摩耗状態を推定する推定処理を行うプログラムを保持しており、そのプログラムの実行結果に基づいて切替機構21が摩耗の限界に近づいたか否かを判定する。
【0024】
ステップS2では、不図示のスポーツモードスイッチ又はマニュアルモードスイッチがONされているか否かを判定する。これらのスイッチは車両1の運転者に操作される。スポーツモードスイッチがONされた場合は、AMT8の変速モードが通常モードから応答性が通常モードに比べて重視された変速スケジュールのスポーツモードへ切り替えられる。マニュアルモードスイッチがONされた場合は、通常モード及びスポーツモードを含む自動変速モードから上述したマニュアルモードに切り替えられる。スポーツモードスイッチ又はマニュアルモードスイッチの少なくともいずれか一方がONされている場合はステップS5に進み、そうでない場合はステップS3に進む。
【0025】
ステップS3では、アクセル開度センサ44の信号を参照してアクセル開度を取得し、そのアクセル開度が所定の閾値を超えたか否かを判定する。この閾値は応答性の要求度が高いと見なし得るアクセル開度範囲の下限値に設定される。従って、アクセル開度がこの閾値を超えた場合は車両1に対する応答性の要求度が高いと言える。アクセル開度が閾値を超えた場合はステップS5に進み、そうでない場合はステップS4に進む。
【0026】
ステップS4では、上述したMG切り離しモードを設定して、今回のルーチンを終了する。具体的には変速モードを管理する変数をMG切り離しモードに対応する値に設定する。ステップS5では、上述した回転数同期モードを設定して、今回のルーチンを終了する。具体的には上記変数を回転数同期モードに対応する値に設定する。なお、MG切り離しモード及び回転数同期モードの各制御内容の詳細は後述する。
【0027】
図2のルーチンによれば、切替機構21の摩耗を回避すべき場合(ステップS1)又は車両1に対して応答性が要求される場合(ステップS2及びステップS3)に回転数同期モードが設定され、その他の場合にMG切り離しモードが設定される。従って、本形態は車両1に要求される状況に応じて2種類の変速モードを切り替えることができる。
【0028】
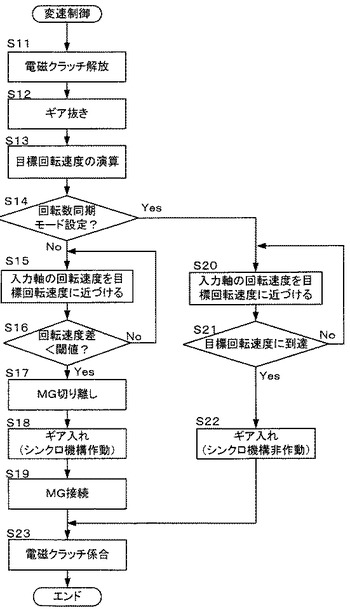
図3のルーチンはAMT8に対する変速要求が成立した場合に実行される。このルーチンのプログラムはECU40に記憶されており、変速要求が成立している間に所定の演算間隔で繰り返し実行される。変速要求は走行モード毎に与えられた条件に従って成立する。例えば、自動変速モードの場合は車速とアクセル開度とで定義され変速段毎に設定された変速線図を車両1の動作点が横切る場合に変速要求が成立する。また、マニュアルモードの場合は車速とアクセル開度とが所定条件に収まっており、不図示のシフトレバーが運転者に操作された場合に変速要求が成立する。
【0029】
ステップS11では、変速要求に応答して摩擦クラッチ7を解放状態に切り替える。ステップS12では、AMT8の結合装置C1〜C4のうち、変速要求前の変速段に対応する結合装置を係合状態から解放状態へ切り替える。即ち、ECU40によっていわゆるギア抜きが行われる。ステップS13では現在の出力軸11の回転速度を出力側レゾルバ42の信号を参照して取得し、その回転速度と変速後の変速段とに基づいて入力軸10の目標回転速度を演算する。その演算は、例えば目標回転速度に対して出力軸11の回転速度と変速段とが対応づけられたマップを参照することによって実現される。
【0030】
ステップS14では、変速モードを管理する変数の値を参照して、上述した回転数同期モードが設定されているか否かを判定する。ステップS14が否定的判定の場合、即ちMG切り離しモードが設定されている場合は、MG切り離しモードを実行すべくステップS15〜ステップS19の処理を行う。一方、ステップS14が肯定的判定の場合は回転数同期モードを実行すべくステップS20〜ステップS22の処理を行う。
【0031】
ステップS15では、モータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御しつつ、入力軸10の回転速度がステップS13で演算した目標回転速度に近づくようにモータ・ジェネレータ3を制御する。ステップS16では、現在の入力軸10の回転速度を入力側レゾルバ41の信号を参照して取得し、その回転速度と目標回転速度との回転速度差を演算する。そして、その回転速度差が所定の閾値を下回ったらステップS17に進み、回転速度差が閾値を下回らない場合はステップS15に戻る。つまり、回転速度差が閾値を下回るまで入力軸10の回転速度を目標回転速度に近づけるステップS15の処理が続行される。この閾値を下回る範囲は本発明の所定範囲に相当する。この閾値はシンクロ機構Syが解消できる回転速度差の範囲を超えないように設定されている。
【0032】
ステップS17では、モータ・ジェネレータ3と入力軸10とのトルク伝達が遮断されるように切替機構21を制御する。即ち、モータ・ジェネレータ3を入力軸10から切り離す。
【0033】
ステップS18では変速操作を開始する。つまり、結合装置C1〜C4のうち変速後の変速段に対応する結合装置を解放状態から係合状態へ切り替える。即ち、ECU40によっていわゆるギア入れが行われる。ギア入れの過程では閾値未満の回転速度差が存在するためシンクロ機構Syが作動することによってその回転速度差が解消される。
【0034】
ステップS19では、モータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御する。つまり、モータ・ジェネレータ3が入力軸10に接続されるように切替機構21を制御する。
【0035】
一方、ステップS20では、ステップS15と同様にモータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御しつつ、入力軸10の回転速度がステップS13で演算した目標回転速度に近づくようにモータ・ジェネレータ3を制御する。
【0036】
ステップS21では、現在の入力軸10の回転速度を入力側レゾルバ41の信号を参照して取得し、その回転速度が目標回転速度に達したか否かを判定する。目標回転速度に達したか否かの判定においては、目標回転速度に完全に一致するか否かを基準とする他、目標回転速度に対してある程度の余裕を与えた範囲内に達したか否かを基準とすることも可能である。入力軸10の回転速度が目標回転速度に達したらステップS22に進み、目標回転速度に達しない場合はステップS20に戻る。つまり、入力軸10の回転速度が目標回転速度に達するまで入力軸10の回転速度を目標回転速度に近づけるステップS20の処理が続行される。
【0037】
ステップS22では、変速操作を開始する。つまり、結合装置C1〜C4のうち変速後の変速段に対応する結合装置を解放状態から係合状態へ切り替える。即ち、ECU40によっていわゆるギア入れが行われる。ギア入れの過程では入力軸10の回転速度が目標回転速度に達しているのでシンクロ機構Syが実質的に作動することはない。また、回転数同期モードの場合は、入力軸10の回転速度と目標回転速度との差が閾値を下回った場合でもモータ・ジェネレータ3と入力軸10との間のトルク伝達が切替機構21にて維持された状態に制御される。
【0038】
ステップS23では、MG切り離しモード又は回転数同期モードの操作が終了し、AMT8の変速段が切り替えられた状態で、摩擦クラッチ7を解放状態から係合状態へ切り替える。これによって、変速要求が成立してからの変速操作が完了する。
【0039】
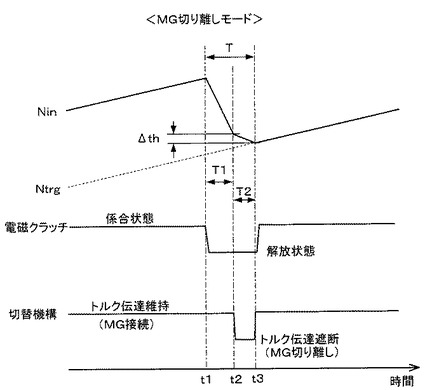
図3に示した制御によれば以下の効果を得ることができる。図4に示すように、MG切り離しモードが設定された場合には、変速要求が成立した時刻t1で摩擦クラッチ7が解放状態へ切り替えられるとともに、入力軸10の回転速度Ninが目標回転速度Ntrgに近づくようにモータ・ジェネレータ3が制御される。そして、時刻t2において、入力軸10の回転速度Ninと目標回転速度Ntrgとの回転速度差が閾値Δthを下回り変速操作が開始される。その際には切替機構21によってモータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断されてモータ・ジェネレータ3が入力軸10から切り離される。変速操作中にはシンクロ機構Syが作動して回転速度差が解消されながら、時刻t3において回転速度Ninが目標回転速度一致する。変速時間Tは、モータ・ジェネレータ3を制御して回転速度Ninを目標回転速度Ntrgに近づける期間T1と、モータ・ジェネレータ3が入力軸10から切り離されてシンクロ機構Syが作動する期間T2とを合わせたものである。MG切り離しモードは回転速度Ninが目標回転速度Ntrgに達する前に変速操作が開始されるので変速時間Tを短縮することができる。そして、モータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断された状態で変速操作が開始されるため、モータ・ジェネレータ3の切り離されることによってモータ・ジェネレータ3相当分のイナーシャが低減する。これにより、シンクロ機構Syに対する負荷を抑えることができる。
【0040】
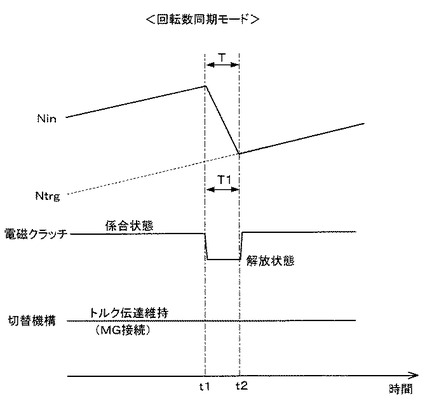
一方、図5に示すように、回転数同期モードが設定された場合には、変速要求が成立した時刻t1で摩擦クラッチ7が係合状態から解放状態へ切り替えられるとともに、入力軸10の回転速度Ninが目標回転速度Ntrgに近づくようにモータ・ジェネレータ3が制御される。その制御は回転速度Ninが目標回転速度Ntrgに達する時(時刻t2)まで続行される。そして、時刻t2で回転速度Ninが目標回転速度Ntrgに達した状態で変速操作が開始されるからシンクロ機構Syが実質的に作動せずに変速操作が完了する。回転数同期モードはシンクロ機構Syが作動しないのでシンクロ機構Syの負荷を低減できる。そして、回転数同期モードは車両1に対する応答性が要求される状況や切替機構21の摩耗を回避すべき状況で設定されるため、車両1に対する応答性が要求される状況で車両1の応答性を確保できるとともに、切替機構21の摩耗を回避すべき状況で切替機構21の操作頻度が減少するので摩耗の進行を抑えることができる。
【0041】
上記形態において、ECU40は図2及び図3の制御ルーチンを実行することにより本発明の制御装置として機能する。また、ECU40は、図3のステップS15及びステップS20を実行することにより本発明の電動機制御手段として、図3のステップS17を実行することにより本発明の切替機構制御手段として、図3のステップS18及びステップS22を実行することにより本発明の変速制御手段として、それぞれ機能する。
【0042】
但し、本発明は上記形態に限定されず、本発明の要旨の範囲内において種々の形態にて実施できる。本発明の制御装置が適用可能な車両としては図1の形態に限らない。電動機は変速機の入力軸へトルク伝達可能な箇所であればその搭載箇所に制限はない。また電動機が変速機の入力軸に直結される形態だけでなく、電動機と入力軸との間に減速機等の各種の伝達要素を介在させて実施してもよい。車両に搭載される変速機はAMTに限らず、手動変速機(MT)を搭載した車両に対しても本発明を適用できる。
【符号の説明】
【0043】
1 車両
2 エンジン
3 モータ・ジェネレータ(電動機)
8 AMT(変速機)
10 入力軸
21 切替機構
40 ECU(電動機制御手段、切替機構制御手段、変速制御手段)
Sy シンクロ機構
【技術分野】
【0001】
本発明は、シンクロ機構を持つ変速機が搭載されたハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
シンクロ機構を持つ変速機が搭載されたハイブリッド車両の制御装置として、変速要求に応答して変速機をニュートラルに操作しつつ入力軸の回転速度が目標回転速度となるように電動機を制御するとともに、その電動機の制御によって入力軸の回転速度と目標回転速度との差が所定範囲内に収まった際にニュートラルから所望の変速比に切り替える変速操作を変速機に実行させるものが知られている(特許文献1)。その他、本発明に関連する先行技術文献として特許文献2及び3が存在する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−274510号公報
【特許文献2】特開2010−12927号公報
【特許文献3】特開2003−335152号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の制御装置は、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始される。そのため、変速機の変速操作に要する時間が短縮される。しかし、変速操作の実行時に入力軸と電動機との間のトルク伝達が維持されているので、シンクロ機構への負荷が増加するおそれがある。
【0005】
そこで、本発明は、変速機の変速時間を短縮しつつシンクロ機構に対する負荷を抑えることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の制御装置は、走行用駆動源として設けられたエンジン及び電動機と、変速比の切り替え時の回転速度差を解消するシンクロ機構が設けられ、前記エンジン及び前記電動機のトルクが入力軸を介して入力される変速機と、前記電動機と前記入力軸との間のトルク伝達を断続可能な切替機構とを有するハイブリッド車両に適用され、前記変速機の変速操作開始時に前記入力軸の回転速度が目標回転速度に近づくように、前記電動機のトルクが前記切替機構を介して前記入力軸に伝達可能な状態で前記電動機を制御する電動機制御手段と、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合に、前記電動機と前記入力軸との間のトルク伝達が遮断されるように前記切替機構を制御する切替機構制御手段と、前記切替機構制御手段にて前記電動機と前記入力軸との間のトルク伝達が遮断されてから前記変速機の変速操作が開始されるように前記変速機を制御する変速制御手段と、を備えるものである(請求項1)。
【0007】
この制御装置によれば、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始されるので変速時間が短縮する。しかも、電動機と入力軸との間のトルク伝達が遮断された状態で変速操作の開始されるため、電動機が入力軸から切り離されることによって電動機相当分のイナーシャが低減する。これにより、シンクロ機構に対する負荷を抑えることができる。
【0008】
本発明の制御装置の一態様において、前記切替機構制御手段は、前記車両に対して応答性が要求される状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御してもよい(請求項2)。この態様によれば、応答性が要求される状況では、シンクロ機構を作動させずに変速操作が開始するので応答性を確保できるとともにシンクロ機構の負荷を低減できる。
【0009】
本発明の制御装置の一態様において、前記切替機構制御手段は、前記切替機構の摩耗を回避すべき状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御してもよい(請求項3)。この態様によれば、切替機構の摩耗を回避すべき状況の場合は切替機構の操作頻度が減少するので摩耗の進行を抑えることができる。
【発明の効果】
【0010】
以上説明したように、本発明のハイブリッド車両の制御装置によれば、入力軸の回転速度と目標回転速度との差が所定範囲内に収まったことを条件として、入力軸の回転速度が目標回転速度に達する前に変速操作が開始され、しかも変速操作が開始される際には電動機が入力軸から切り離されているので、変速時間を短縮できるとともにシンクロ機構に対する負荷を抑えることができる。
【図面の簡単な説明】
【0011】
【図1】本発明の一形態に係る制御装置が適用された車両を模式的に示した全体構成図。
【図2】変速モード設定処理のルーチンの一例を示したフローチャート。
【図3】変速制御の制御ルーチンの一例を示したフローチャート。
【図4】MG切り離しモードの実行結果の一例を示したタイミングチャート。
【図5】回転数同期モードの実行結果の一例を示したタイミングチャート。
【発明を実施するための形態】
【0012】
図1に示すように、車両1は内燃機関2及び電動機としてのモータ・ジェネレータ3が走行用動力源として設けられたいわゆるハイブリッド車両として構成されている。内燃機関(以下、エンジンという。)2は火花点火型の内燃機関として構成されている。エンジン2の出力軸2aは、摩擦クラッチ7を介して変速機としてのオートメーテッドトランスミッション(AMT)8と接続されている。摩擦クラッチ7はAMT8の変速操作に合わせて係合操作及び解放操作が行なわれる。
【0013】
AMT8は前進4段の複数の変速段から一つの変速段を選択できる。AMT8による変速段の選択は車両1の車速やアクセル開度に基づいて自動的に行なわれる。また、AMT8がマニュアルモードへ切り替えられることにより、不図示のシフトノブを運転者が操作することによって変速段が選択される。
【0014】
AMT8は、入力軸10と、これと平行に延びている出力軸11と、これら入力軸10と出力軸11との間に設けられた第1〜第4ギア対G1〜G4とを備えている。第1〜第4ギア対G1〜G4は第1速〜第4速に対応する。なお、車両1の後退走行は第1速が選択された状態でモータ・ジェネレータ3が逆転することにより実施される。第1ギア対G1は互いに噛み合う第1ドライブギア13及び第1ドリブンギア14を含む。第2ギア対G2は互いに噛み合う第2ドライブギア15及び第2ドリブンギア16を含む。第3ギア対G3は互いに噛み合う第3ドライブギア17及び第3ドリブンギア18を含む。第4ギア対G4は互いに噛み合う第4ドライブギア19及び第4ドリブンギア20を含む。各ギア対G1〜G4のギア比は、第1ギア対G1、第2ギア対G2、第3ギア対G3、第4ギア対G4の順に小さくなるように設定されている。
【0015】
第1ドライブギア13及び第2ドライブギア15は、それぞれ入力軸10と一体に回転するように入力軸10に設けられている。一方、第3ドライブギア17及び第4ドライブギア19は、それぞれ入力軸10に対して相対回転可能なように入力軸10に設けられている。第1ドリブンギア14及び第2ドリブンギア16は、それぞれ出力軸11に対して相対回転可能なように出力軸11に設けられている。一方、第3ドリブンギア18及び第4ドリブンギア20は、それぞれ出力軸11と一体に回転するように出力軸11に設けられている。
【0016】
AMT8には、上記複数の変速段のいずれか一つを有効化するため、結合装置C1〜C4が設けられている。各結合装置C1〜C4は周知の噛み合い式クラッチとして構成されており、不図示の操作機構にて操作される。各結合装置C1〜C4と入力軸10又は出力軸11との間には各結合装置C1〜C4と入力軸10又は出力軸11との間の回転速度差を解消するように作動するシンクロ機構Syが介在する。シンクロ機構Syは周知のものと同様であるためその構造の詳細な説明は省略する。
【0017】
第1結合装置C1は第1ドリブンギア14を出力軸11に結合させて第1ドリブンギア14と出力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。同様に、第2結合装置C2は第2ドリブンギア16を出力軸11に結合させて第2ドリブンギア16と出力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。また、第3結合装置C3は第3ドライブギア17を入力軸10に結合させて第3ドライブギア17と入力軸10とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。同様に、第4結合装置C4は第4ドライブギア19を入力軸11に結合させて第4ドライブギア19と入力軸11とを一体回転させる係合状態と、その結合を解放する解放状態との間で動作できる。AMT8は、これらの結合装置C1〜C4のいずれか一つが係合状態となることによって上記複数の変速段のいずれか一つを有効化できる。
【0018】
モータ・ジェネレータ3とAMT8の入力軸10との間には、これらの間のトルク伝達を断続できる切替機構21が設けられている。切替機構21は例えば摩擦クラッチとして構成されており、不図示のアクチュエータを駆動源としてモータ・ジェネレータ3と入力軸10との間のトルク伝達を維持する係合状態と、これらの間のトルク伝達を遮断する解放状態とを切り替えることができる。
【0019】
出力軸11には出力ギア22が一体回転するように設けられている。出力ギア22は、不図示の駆動輪に連結された差動機構25のケースに設けられたリングギア26と噛み合っている。AMT8から出力されたトルクはリングギア26及び差動機構25を介して左右の駆動輪に伝達される。
【0020】
エンジン2、モータ・ジェネレータ3、摩擦クラッチ7、AMT8及び切替機構21のそれぞれに対する制御は、コンピュータユニットとして構成された電子制御ユニット(ECU)40にて行われている。ECU40は車両1の適正な走行状態を得るための各種制御プログラムを保持している。ECU40は、これらのプログラムを実行することにより上述したエンジン2等の制御対象に対する制御を行っている。ECU40には車両1の走行状態に関係する情報を出力する種々のセンサが接続されている。例えば、入力軸10の回転速度に応じた信号を出力する入力側レゾルバ41、出力軸11の回転速度に応じた信号を出力する出力側レゾルバ42、エンジン2のクランク角に応じた信号を出力するクランク角センサ43、及びアクセル開度に応じた信号を出力するアクセル開度センサ44がECU40に電気的に接続されている。
【0021】
ECU40が行なう制御としては、エンジン2及びモータ・ジェネレータ3を走行用動力源とするハイブリッド走行モードやエンジン2を停止した状態でモータ・ジェネレータ3のみを走行用動力源とする電気走行モード等の各種の走行モードを切り替える走行モード切替制御がある。その走行モード切替制御に付随してエンジン2の停止制御や始動制御が行なわれる。更に、車両1の減速時に駆動輪から入力される動力を利用してモータ・ジェネレータ3で発電する回生制御も行なわれる。以下、ECU40が実行する制御のうち本発明に関連する制御について説明し、その他の制御については説明を省略ないし簡略化する。
【0022】
本形態は車両1の走行状態に応じて変速モードを切り替えるAMT8に対する変速制御に特徴がある。図2のルーチンは、シンクロ機構Syを作動させない回転数同期モード又はシンクロ機構Syを作動させつつモータ・ジェネレータ3を切り離すMG切り離しモードのいずれかに変速モードを設定するものである。このルーチンのプログラムはECU40に記憶されており、車両1の走行中に適時に読み出されて所定の演算間隔で繰り返し実行される。
【0023】
ステップS1では、切替機構21の摩耗を回避すべき状況か否かを判定する。その摩耗を回避すべき状況の場合はステップS5に進み、そうでない場合はステップS2に進む。摩耗を回避すべき状況としては切替機構21が摩耗の限界に近づいた場合が該当する。なお、ECU40は切替機構21の作動時間及びその負荷を積算して摩耗状態を推定する推定処理を行うプログラムを保持しており、そのプログラムの実行結果に基づいて切替機構21が摩耗の限界に近づいたか否かを判定する。
【0024】
ステップS2では、不図示のスポーツモードスイッチ又はマニュアルモードスイッチがONされているか否かを判定する。これらのスイッチは車両1の運転者に操作される。スポーツモードスイッチがONされた場合は、AMT8の変速モードが通常モードから応答性が通常モードに比べて重視された変速スケジュールのスポーツモードへ切り替えられる。マニュアルモードスイッチがONされた場合は、通常モード及びスポーツモードを含む自動変速モードから上述したマニュアルモードに切り替えられる。スポーツモードスイッチ又はマニュアルモードスイッチの少なくともいずれか一方がONされている場合はステップS5に進み、そうでない場合はステップS3に進む。
【0025】
ステップS3では、アクセル開度センサ44の信号を参照してアクセル開度を取得し、そのアクセル開度が所定の閾値を超えたか否かを判定する。この閾値は応答性の要求度が高いと見なし得るアクセル開度範囲の下限値に設定される。従って、アクセル開度がこの閾値を超えた場合は車両1に対する応答性の要求度が高いと言える。アクセル開度が閾値を超えた場合はステップS5に進み、そうでない場合はステップS4に進む。
【0026】
ステップS4では、上述したMG切り離しモードを設定して、今回のルーチンを終了する。具体的には変速モードを管理する変数をMG切り離しモードに対応する値に設定する。ステップS5では、上述した回転数同期モードを設定して、今回のルーチンを終了する。具体的には上記変数を回転数同期モードに対応する値に設定する。なお、MG切り離しモード及び回転数同期モードの各制御内容の詳細は後述する。
【0027】
図2のルーチンによれば、切替機構21の摩耗を回避すべき場合(ステップS1)又は車両1に対して応答性が要求される場合(ステップS2及びステップS3)に回転数同期モードが設定され、その他の場合にMG切り離しモードが設定される。従って、本形態は車両1に要求される状況に応じて2種類の変速モードを切り替えることができる。
【0028】
図3のルーチンはAMT8に対する変速要求が成立した場合に実行される。このルーチンのプログラムはECU40に記憶されており、変速要求が成立している間に所定の演算間隔で繰り返し実行される。変速要求は走行モード毎に与えられた条件に従って成立する。例えば、自動変速モードの場合は車速とアクセル開度とで定義され変速段毎に設定された変速線図を車両1の動作点が横切る場合に変速要求が成立する。また、マニュアルモードの場合は車速とアクセル開度とが所定条件に収まっており、不図示のシフトレバーが運転者に操作された場合に変速要求が成立する。
【0029】
ステップS11では、変速要求に応答して摩擦クラッチ7を解放状態に切り替える。ステップS12では、AMT8の結合装置C1〜C4のうち、変速要求前の変速段に対応する結合装置を係合状態から解放状態へ切り替える。即ち、ECU40によっていわゆるギア抜きが行われる。ステップS13では現在の出力軸11の回転速度を出力側レゾルバ42の信号を参照して取得し、その回転速度と変速後の変速段とに基づいて入力軸10の目標回転速度を演算する。その演算は、例えば目標回転速度に対して出力軸11の回転速度と変速段とが対応づけられたマップを参照することによって実現される。
【0030】
ステップS14では、変速モードを管理する変数の値を参照して、上述した回転数同期モードが設定されているか否かを判定する。ステップS14が否定的判定の場合、即ちMG切り離しモードが設定されている場合は、MG切り離しモードを実行すべくステップS15〜ステップS19の処理を行う。一方、ステップS14が肯定的判定の場合は回転数同期モードを実行すべくステップS20〜ステップS22の処理を行う。
【0031】
ステップS15では、モータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御しつつ、入力軸10の回転速度がステップS13で演算した目標回転速度に近づくようにモータ・ジェネレータ3を制御する。ステップS16では、現在の入力軸10の回転速度を入力側レゾルバ41の信号を参照して取得し、その回転速度と目標回転速度との回転速度差を演算する。そして、その回転速度差が所定の閾値を下回ったらステップS17に進み、回転速度差が閾値を下回らない場合はステップS15に戻る。つまり、回転速度差が閾値を下回るまで入力軸10の回転速度を目標回転速度に近づけるステップS15の処理が続行される。この閾値を下回る範囲は本発明の所定範囲に相当する。この閾値はシンクロ機構Syが解消できる回転速度差の範囲を超えないように設定されている。
【0032】
ステップS17では、モータ・ジェネレータ3と入力軸10とのトルク伝達が遮断されるように切替機構21を制御する。即ち、モータ・ジェネレータ3を入力軸10から切り離す。
【0033】
ステップS18では変速操作を開始する。つまり、結合装置C1〜C4のうち変速後の変速段に対応する結合装置を解放状態から係合状態へ切り替える。即ち、ECU40によっていわゆるギア入れが行われる。ギア入れの過程では閾値未満の回転速度差が存在するためシンクロ機構Syが作動することによってその回転速度差が解消される。
【0034】
ステップS19では、モータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御する。つまり、モータ・ジェネレータ3が入力軸10に接続されるように切替機構21を制御する。
【0035】
一方、ステップS20では、ステップS15と同様にモータ・ジェネレータ3と入力軸10とのトルク伝達が維持されるように切替機構21を制御しつつ、入力軸10の回転速度がステップS13で演算した目標回転速度に近づくようにモータ・ジェネレータ3を制御する。
【0036】
ステップS21では、現在の入力軸10の回転速度を入力側レゾルバ41の信号を参照して取得し、その回転速度が目標回転速度に達したか否かを判定する。目標回転速度に達したか否かの判定においては、目標回転速度に完全に一致するか否かを基準とする他、目標回転速度に対してある程度の余裕を与えた範囲内に達したか否かを基準とすることも可能である。入力軸10の回転速度が目標回転速度に達したらステップS22に進み、目標回転速度に達しない場合はステップS20に戻る。つまり、入力軸10の回転速度が目標回転速度に達するまで入力軸10の回転速度を目標回転速度に近づけるステップS20の処理が続行される。
【0037】
ステップS22では、変速操作を開始する。つまり、結合装置C1〜C4のうち変速後の変速段に対応する結合装置を解放状態から係合状態へ切り替える。即ち、ECU40によっていわゆるギア入れが行われる。ギア入れの過程では入力軸10の回転速度が目標回転速度に達しているのでシンクロ機構Syが実質的に作動することはない。また、回転数同期モードの場合は、入力軸10の回転速度と目標回転速度との差が閾値を下回った場合でもモータ・ジェネレータ3と入力軸10との間のトルク伝達が切替機構21にて維持された状態に制御される。
【0038】
ステップS23では、MG切り離しモード又は回転数同期モードの操作が終了し、AMT8の変速段が切り替えられた状態で、摩擦クラッチ7を解放状態から係合状態へ切り替える。これによって、変速要求が成立してからの変速操作が完了する。
【0039】
図3に示した制御によれば以下の効果を得ることができる。図4に示すように、MG切り離しモードが設定された場合には、変速要求が成立した時刻t1で摩擦クラッチ7が解放状態へ切り替えられるとともに、入力軸10の回転速度Ninが目標回転速度Ntrgに近づくようにモータ・ジェネレータ3が制御される。そして、時刻t2において、入力軸10の回転速度Ninと目標回転速度Ntrgとの回転速度差が閾値Δthを下回り変速操作が開始される。その際には切替機構21によってモータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断されてモータ・ジェネレータ3が入力軸10から切り離される。変速操作中にはシンクロ機構Syが作動して回転速度差が解消されながら、時刻t3において回転速度Ninが目標回転速度一致する。変速時間Tは、モータ・ジェネレータ3を制御して回転速度Ninを目標回転速度Ntrgに近づける期間T1と、モータ・ジェネレータ3が入力軸10から切り離されてシンクロ機構Syが作動する期間T2とを合わせたものである。MG切り離しモードは回転速度Ninが目標回転速度Ntrgに達する前に変速操作が開始されるので変速時間Tを短縮することができる。そして、モータ・ジェネレータ3と入力軸10との間のトルク伝達が遮断された状態で変速操作が開始されるため、モータ・ジェネレータ3の切り離されることによってモータ・ジェネレータ3相当分のイナーシャが低減する。これにより、シンクロ機構Syに対する負荷を抑えることができる。
【0040】
一方、図5に示すように、回転数同期モードが設定された場合には、変速要求が成立した時刻t1で摩擦クラッチ7が係合状態から解放状態へ切り替えられるとともに、入力軸10の回転速度Ninが目標回転速度Ntrgに近づくようにモータ・ジェネレータ3が制御される。その制御は回転速度Ninが目標回転速度Ntrgに達する時(時刻t2)まで続行される。そして、時刻t2で回転速度Ninが目標回転速度Ntrgに達した状態で変速操作が開始されるからシンクロ機構Syが実質的に作動せずに変速操作が完了する。回転数同期モードはシンクロ機構Syが作動しないのでシンクロ機構Syの負荷を低減できる。そして、回転数同期モードは車両1に対する応答性が要求される状況や切替機構21の摩耗を回避すべき状況で設定されるため、車両1に対する応答性が要求される状況で車両1の応答性を確保できるとともに、切替機構21の摩耗を回避すべき状況で切替機構21の操作頻度が減少するので摩耗の進行を抑えることができる。
【0041】
上記形態において、ECU40は図2及び図3の制御ルーチンを実行することにより本発明の制御装置として機能する。また、ECU40は、図3のステップS15及びステップS20を実行することにより本発明の電動機制御手段として、図3のステップS17を実行することにより本発明の切替機構制御手段として、図3のステップS18及びステップS22を実行することにより本発明の変速制御手段として、それぞれ機能する。
【0042】
但し、本発明は上記形態に限定されず、本発明の要旨の範囲内において種々の形態にて実施できる。本発明の制御装置が適用可能な車両としては図1の形態に限らない。電動機は変速機の入力軸へトルク伝達可能な箇所であればその搭載箇所に制限はない。また電動機が変速機の入力軸に直結される形態だけでなく、電動機と入力軸との間に減速機等の各種の伝達要素を介在させて実施してもよい。車両に搭載される変速機はAMTに限らず、手動変速機(MT)を搭載した車両に対しても本発明を適用できる。
【符号の説明】
【0043】
1 車両
2 エンジン
3 モータ・ジェネレータ(電動機)
8 AMT(変速機)
10 入力軸
21 切替機構
40 ECU(電動機制御手段、切替機構制御手段、変速制御手段)
Sy シンクロ機構
【特許請求の範囲】
【請求項1】
走行用駆動源として設けられたエンジン及び電動機と、変速比の切り替え時の回転速度差を解消するシンクロ機構が設けられ、前記エンジン及び前記電動機のトルクが入力軸を介して入力される変速機と、前記電動機と前記入力軸との間のトルク伝達を断続可能な切替機構とを有するハイブリッド車両に適用され、
前記変速機の変速操作開始時に前記入力軸の回転速度が目標回転速度に近づくように、前記電動機のトルクが前記切替機構を介して前記入力軸に伝達可能な状態で前記電動機を制御する電動機制御手段と、
前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合に、前記電動機と前記入力軸との間のトルク伝達が遮断されるように前記切替機構を制御する切替機構制御手段と、
前記切替機構制御手段にて前記電動機と前記入力軸との間のトルク伝達が遮断されてから前記変速機の変速操作が開始されるように前記変速機を制御する変速制御手段と、
を備えるハイブリッド車両の制御装置。
【請求項2】
前記切替機構制御手段は、前記車両に対して応答性が要求される状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、
前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御する、請求項1の制御装置。
【請求項3】
前記切替機構制御手段は、前記切替機構の摩耗を回避すべき状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、
前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御する、請求項1の制御装置。
【請求項1】
走行用駆動源として設けられたエンジン及び電動機と、変速比の切り替え時の回転速度差を解消するシンクロ機構が設けられ、前記エンジン及び前記電動機のトルクが入力軸を介して入力される変速機と、前記電動機と前記入力軸との間のトルク伝達を断続可能な切替機構とを有するハイブリッド車両に適用され、
前記変速機の変速操作開始時に前記入力軸の回転速度が目標回転速度に近づくように、前記電動機のトルクが前記切替機構を介して前記入力軸に伝達可能な状態で前記電動機を制御する電動機制御手段と、
前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合に、前記電動機と前記入力軸との間のトルク伝達が遮断されるように前記切替機構を制御する切替機構制御手段と、
前記切替機構制御手段にて前記電動機と前記入力軸との間のトルク伝達が遮断されてから前記変速機の変速操作が開始されるように前記変速機を制御する変速制御手段と、
を備えるハイブリッド車両の制御装置。
【請求項2】
前記切替機構制御手段は、前記車両に対して応答性が要求される状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、
前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御する、請求項1の制御装置。
【請求項3】
前記切替機構制御手段は、前記切替機構の摩耗を回避すべき状況の場合、前記入力軸の回転速度が前記目標回転速度に近づくように前記電動機制御手段にて前記電動機が制御されることによって、前記入力軸の回転速度と前記目標回転速度との差が所定範囲内に収まった場合でも、前記電動機と前記入力軸との間のトルク伝達が維持されるように前記切替機構を制御し、
前記変速制御手段は、前記入力軸の回転速度が前記目標回転速度に達した時に前記変速機の変速操作が開始されるように前記変速機を制御する、請求項1の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−107527(P2013−107527A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254878(P2011−254878)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]