
ハイブリッド車両の制御装置
【課題】モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なることを抑制できるハイブリッド車両の制御装置を提供する。
【解決手段】第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における高車速領域では、内燃機関1を始動開始するか否かの判断に用いられる閾値が、内燃機関1の燃費改善を意図した値よりも大きい値に変更される。このため、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大して駆動軸3に作用するトルクが反転する際、上記走行パワーが閾値以上になりにくくなり、ひいては停止状態にある内燃機関1の始動が生じにくくなる。
【解決手段】第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における高車速領域では、内燃機関1を始動開始するか否かの判断に用いられる閾値が、内燃機関1の燃費改善を意図した値よりも大きい値に変更される。このため、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大して駆動軸3に作用するトルクが反転する際、上記走行パワーが閾値以上になりにくくなり、ひいては停止状態にある内燃機関1の始動が生じにくくなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
原動機としてモータ及び内燃機関を搭載したハイブリッド車両は、それら原動機の出力トルクをギヤ機構を介して車輪に伝達することにより走行する。こうしたハイブリッド車両では、原動機として搭載される内燃機関の燃費改善を意図して、同車両で要求される走行パワーが閾値未満であるときにはモータの駆動のみによる走行を行う一方、上記走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関を始動させるようにしている。
【0003】
上記ハイブリッド車両において、モータの駆動のみによる走行中に減速状態から加速される場合などには、モータの出力トルクの増大に伴って同車両の駆動軸に作用するトルクが車輪の回転と逆方向のトルク(負トルク)から車輪の回転と同方向のトルク(正トルク)に反転する。このように駆動軸に作用するトルクが反転すると、ギヤ機構における互いに噛み合うギヤ同士がバックラッシの分だけ相対回転し、その相対回転に伴って上記互いに噛み合うギヤ同士で歯打ち音が生じる。このときの歯打ち音を小さく抑えるため、特許文献1に示されるように、モータのみの駆動によるハイブリッド車両の走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、モータの出力トルクを緩やかに変化(増加)させることが提案されている。
【0004】
また、上述したようにモータの出力トルクを緩やかに変化させているとき、内燃機関が始動開始されて同機関の出力トルクが増大して駆動軸に作用する正トルクが急増すると、それに伴いショックが生じたり上記互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。このため、特許文献1では、上述したようにモータの出力トルクを緩やかに変化させているときには内燃機関の始動を禁止し、それによって上述したショックの発生や歯打ち音の増大を抑制するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−232993公報(段落[0027]〜[0035])
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1のように内燃機関の始動を禁止するためには、その禁止を行うべき期間としてモータの出力トルクの増大に伴い駆動軸に作用するトルクが負トルクから正トルクに反転する期間、すなわちモータの出力トルクを緩やかに増大させる期間を的確に判別しなければならない。
【0007】
しかし、こうした期間を必ずしも的確に判別できるとは限らず、その判別を的確に行うことができない場合には内燃機関の始動が禁止される期間を適正な期間とすることができない可能性がある。そして、内燃機関の始動が禁止される期間を適正な期間、すなわち駆動軸に作用するトルクが負トルクから正トルクに反転する期間とすることができない場合、その期間中に内燃機関が始動開始されるおそれがある。言い換えれば、モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なるおそれがある。
【0008】
そして、駆動軸に作用するトルクの負トルクから正トルクへの反転と内燃機関の始動開始とが重なると、内燃機関の始動開始に伴う同機関の出力トルクの増大によって駆動軸に作用する正トルクも急増し、それによってショックが生じたりギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0009】
本発明はこのような実情に鑑みてなされたものであって、その目的は、モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なることを抑制できるハイブリッド車両の制御装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1記載の発明によれば、ハイブリッド車両に原動機として搭載されたモータ及び内燃機関の出力トルクがギヤ機構を介して車輪に伝達されると、それによって同ハイブリッド車両が走行するようになる。そして、ハイブリッド車両で要求される走行パワーが閾値未満であるときにはモータの駆動のみによる走行が行われる一方、走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関が始動される。ここで、上記閾値は、内燃機関の燃費改善を実現できるように車速に基づき設定手段によって可変設定される。ただし、このように閾値を車速に基づいて可変設定すると、高車速領域では上記閾値が小さくなる傾向がある。このことに起因して、高車速領域でのモータの駆動のみによるハイブリッド車両の走行中に、次のような状況が生じる可能性がある。
【0011】
すなわち、モータの駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴いモータの出力トルクが増大するとともに、上記走行パワーが閾値以上になって停止状態にある内燃機関が始動開始される。この場合、モータの出力トルク増大によってハイブリッド車両の駆動軸に作用するトルクが車輪の回転と逆方向のトルク(負トルク)から車輪の回転と同方向のトルク(正トルク)に反転するとともに、その反転が行われる期間と内燃機関の始動開始とが重なる。その結果、駆動軸に作用するトルクが負トルクから正トルクに反転する際、内燃機関の始動開始に伴い同機関の出力トルクが急増して上記駆動軸に作用する正トルクも急増する。そして、このように駆動軸に作用する正トルクが急増することで、ショックが生じたりギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0012】
こうした問題に対処するため、請求項1記載の発明では、高車速領域では上記閾値を設定手段により可変設定される値よりも大きい値に変更することが、変更手段を通じて行われる。このように高車速領域では上記閾値を大きい値に変更することにより、高車速領域でのモータの駆動のみによるハイブリッド車両の走行中に、上述したショックの発生や歯打ち音の増大といった問題が生じることを抑制できる。詳しくは、モータの駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴いモータの出力トルクが増大するとき、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関の始動も生じにくくなる。この場合、モータの出力トルク増大によってハイブリッド車両の駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関の始動開始とが重なることは抑制される。ちなみに、このように上記駆動軸に作用するトルクが反転する期間と内燃機関の始動開始とが重なることを抑制する際、上記期間を判別する必要はないため、そうした判別を的確に行えないことに起因して、上記期間と内燃機関の始動が重なってしまうということはない。そして、上記期間と内燃機関の始動開始との重なりを抑制することで、上記トルクの反転時に内燃機関の始動開始に伴い同機関の出力トルクが急増することを抑制でき、ひいては駆動軸に作用する正トルクの急増も抑制できる。従って、駆動軸に作用する正トルクが急増することによる上記ショックの発生や上記歯打ち音の増大を抑制することができる。
【0013】
また、上記閾値を内燃機関の燃費が改善されるように車速に基づき可変設定すると、請求項2記載の発明のように、車速が高くなるほど上記閾値が小さくなるよう同閾値が車速に基づいて可変設定されることとなる。このときには、高車速領域において車速が高くなるほど上記閾値がより大きい値となるよう、変更手段を通じて同閾値を車速に基づいて変更することが好ましい。これは、車速が高くなるほど、モータの駆動のみによる走行中のハイブリッド車両を減速状態から加速させるとき、要求される走行パワーが大きくなりやすい傾向があり、そうした傾向のもとでも走行パワーが閾値以上になりにくくするうえで、その閾値を車速に応じて上述したように可変とすることが有効なためである。
【0014】
なお、上記設定手段及び上記変更手段としては、請求項3記載の発明のものを採用することが考えられる。この場合、上記設定手段としては、高車速領域よりも低い車速のとき、その車速に基づきマップを参照して上記閾値を設定するものが採用される。また、上記変更手段としては、高車速領域内の車速であるとき、その車速に基づきマップを参照して上記閾値を設定することで、同閾値を車速に基づいて上記設定手段により設定したと仮定した場合の閾値よりも大きい値とするものが採用される。
【図面の簡単な説明】
【0015】
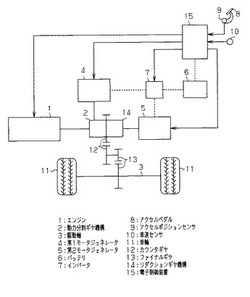
【図1】本実施形態の制御装置が適用されるハイブリッド車両の構成を示す略図。
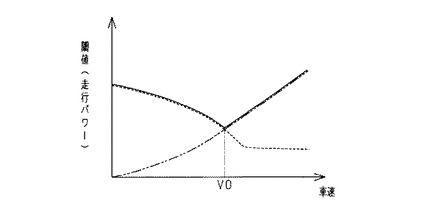
【図2】車速の変化に対する閾値の変化を示すグラフ。
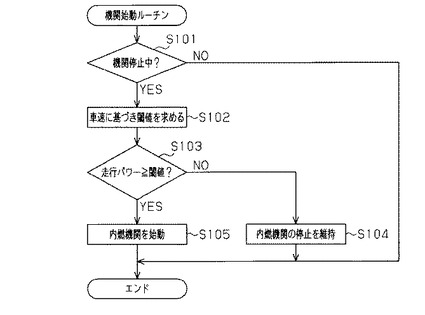
【図3】第2モータジェネレータの駆動のみによるハイブリッド車両の走行中における内燃機関の始動手順を示すフローチャート。
【発明を実施するための形態】
【0016】
以下、本発明を内燃機関とモータとを原動機として搭載するハイブリッド車両の制御装置に具体化した一実施形態について、図1〜図3に従って説明する。
図1に示すハイブリッド車両において、内燃機関1から出力された動力は、遊星歯車等からなる動力分割ギヤ機構2により、同車両の駆動軸3に対しカウンタギヤ12及びファイナルギヤ13を介して伝達される動力と、第1モータジェネレータ4に伝達される動力とに分割される。また、ハイブリッド車両の駆動軸3には、第2モータジェネレータ5から出力される動力が、遊星歯車等からなるリダクションギヤ機構14、上記カウンタギヤ12、及び上記ファイナルギヤ13を介して伝達される。そして、駆動軸3への動力の伝達により同駆動軸3に繋がる車輪11が回転すると、ハイブリッド車両が走行するようになる。なお、上記動力分割ギヤ機構2、リダクションギヤ機構14、カウンタギヤ12、及びファイナルギヤ13は、ハイブリッド車両における原動機の出力トルクを駆動軸3及び車輪11に伝達するためのギヤ機構として機能する。
【0017】
上記第1モータジェネレータ4は、主に発電機として機能するが、内燃機関1の始動時などハイブリッド車両の運転状態によってはモータとしても機能する。また、上記第2モータジェネレータ5は、主にモータとして機能するが、ハイブリッド車両の減速時など同車両の運転状態によっては発電機としても機能する。そして、ハイブリッド車両には、バッテリ6と第1及び第2モータジェネレータ4,5との間での電力の入出力を制御するインバータ7が設けられている。このインバータ7は、例えば、主に発電機として機能する第1モータジェネレータ4での発電により得られる電力をバッテリ6に供給して同バッテリ6の充電を行うとともに、主にモータとして機能する第2モータジェネレータ5に対しバッテリ6からの電力供給を行う。
【0018】
ハイブリッド車両には、同車両に搭載された各種機器の制御を行う電子制御装置15が設けられている。この電子制御装置15は、上記各種機器の制御に係る演算処理を実行するCPU、その制御に必要なプログラムやデータの記憶されたROM、CPUの演算結果等が一時記憶されるRAM、外部との間で信号を入・出力するための入・出力ポート等を備えている。この電子制御装置15の入力ポートには、ハイブリッド車両の運転者によって操作されるアクセルペダル8の操作量(アクセル操作量)を検出するアクセルポジションセンサ9、及び、ハイブリッド車両の車速を検出する車速センサ10といった各種のセンサ等からの信号が入力される。一方、電子制御装置15の出力ポートには、内燃機関1を運転するための各種機器の駆動回路、第1モータジェネレータ4の駆動回路、第2モータジェネレータ5の駆動回路、及びインバータ7の駆動回路等が接続されている。
【0019】
電子制御装置15は、車速及びアクセル操作量といった運転状態に基づきハイブリッド車両で要求される走行パワーを求め、その求められた走行パワーが得られるよう内燃機関1から出力される動力や第2モータジェネレータ5から出力される動力を制御する。こうした内燃機関1及び第2モータジェネレータ5の制御は、それらの駆動に伴うエネルギ消費を可能な限り抑えることを考慮して行われる。例えば、ハイブリッド車両で要求される走行パワーが閾値未満であるときには、内燃機関1の燃費改善を意図して、第2モータジェネレータ5をモータとして機能させつつ内燃機関1の運転を停止させることで、第2モータジェネレータ5の駆動のみによる走行を行う。一方、上記要求される走行パワーが閾値以上になったときには、その走行パワーが速やかに得られるよう、第2モータジェネレータ5をモータとして機能させつつ、内燃機関1を始動させて同機関1の運転も行うことで、第2モータジェネレータ5と内燃機関1との併用による走行を行う。
【0020】
次に、内燃機関1を運転するか、或いは同運転を停止するかを決定するための上記閾値について詳しく説明する。
上記閾値は、内燃機関1の燃費改善を実現できるように車速に基づき可変設定される。このように可変設定される上記閾値は、例えば図2に破線で示すように、車速の増大に従って徐々に小さくなってゆき、高車速領域(図中における車速V0以上の領域)では小さい値になるという傾向がある。このように上記閾値が高車速領域で小さい値になることに起因して、高車速領域での第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中に、次のような状況が生じる可能性がある。
【0021】
すなわち、第2モータジェネレータ5の駆動のみによる走行中であって減速状態にあるハイブリッド車両が運転者のアクセルペダル8の踏み込みによって加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大するとともに、上記走行パワーが閾値以上になって停止状態にある内燃機関1が始動開始される。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが車輪11の回転と逆方向のトルク(負トルク)から車輪11の回転と同方向のトルク(正トルク)に反転するとともに、その反転が行われる期間と内燃機関1の始動開始とが重なる。
【0022】
上記駆動軸3に作用するトルクが負トルクから正トルクに反転すると、ギヤ機構(リダクションギヤ機構14、カウンタギヤ12、及びファイナルギヤ13等)における互いに噛み合うギヤ同士がバックラッシの分だけ相対回転し、その相対回転に伴って上記互いに噛み合うギヤ同士で歯打ち音が生じる。また、上記駆動軸3に作用するトルクの反転が行われる期間と内燃機関1の始動開始とが重なると、駆動軸3に作用するトルクが負トルクから正トルクに反転する際、内燃機関1の始動開始に伴い同機関1の出力トルクが急増して上記駆動軸3に作用する正トルクも急増する。そして、上記したように駆動軸3に作用する正トルクが急増することで、ショックが生じたり上記ギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0023】
こうした問題に対処するため、本実施形態では、高車速領域では上記閾値を破線で示す値(内燃機関1の燃費改善を意図した値)よりも大きい値、例えば図中に二点鎖線で示す値に変更することが行われる。詳しくは、上記二点鎖線から明らかなように、車速が高くなるほど上記閾値がより大きい値となるよう同閾値が車速に基づいて変更される。このように高車速領域において、上記閾値を大きい値に変更することにより、高車速領域での第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中に、上述したショックの発生や歯打ち音の増大といった問題が生じることを抑制できる。
【0024】
詳しくは、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大する際に、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関1の始動も生じにくくなる。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関1の始動開始とが重なることは抑制される。その結果、上記トルクの反転時に内燃機関1の始動開始に伴い同機関1の出力トルクが急増することは抑制され、ひいては駆動軸3に作用する正トルクの急増も抑制される。従って、駆動軸3に作用する正トルクが急増することによる上記ショックの発生や上記歯打ち音の増大を抑制することができる。
【0025】
次に、第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における内燃機関1の始動について、機関始動ルーチンを示す図3のフローチャートを参照して説明する。この機関始動ルーチンは、電子制御装置15を通じて、例えば所定時間毎の時間割り込みにて周期的に実行される。
【0026】
同ルーチンにおいては、第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中であって、且つ内燃機関1の運転停止中であるか否かが判断される(S101)。ここで肯定判定であれば、内燃機関1の運転を開始するか、同運転の停止を維持するかの判断に用いられる上記閾値が、そのときの車速に基づきマップを参照して求められる(S102)。このマップにおいては、車速V0未満の低車速領域では図2に破線で示す車速と閾値との関係が規定されており、車速V0以上の高車速領域では図2に二点鎖線で示す車速と閾値との関係が規定されている。従って、このマップを参照して求められた閾値は、車速の変化に対し図2の実線で示すように推移する。
【0027】
なお、電子制御装置15は、低車速領域にて車速に基づき上記マップを参照して上記閾値を求める際には、その閾値を車速に基づき可変設定する設定手段として機能する。また、電子制御装置15は、高車速領域にて車速に基づき上記マップを参照して閾値を求める際には、その閾値を上記設定手段により可変設定される値(図2の破線)よりも大きい値(図2の二点鎖線)に変更する変更手段として機能する。
【0028】
上述したように閾値が求められた後、アクセル操作量及び車速から求められる走行パワー、すなわちハイブリッド車両で要求される走行パワーが上記閾値以上であるか否かが判断される(S103)。ここで否定判定であれば、内燃機関1の運転停止が維持される(S104)。一方、S103で肯定判定であれば、内燃機関1の始動が開始される(S105)。詳しくは、第1モータジェネレータ4により内燃機関1のクランキングが行われるとともに、その内燃機関1での燃料噴射や点火が開始されて同機関の自立運転が開始されるようになる。その結果、第2モータジェネレータ5と内燃機関1との併用により、ハイブリッド車両が走行する。
【0029】
以上詳述した本実施形態によれば、以下に示す効果が得られるようになる。
(1)第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における高車速領域では、内燃機関1を始動開始するか否かの判断に用いられる閾値が、内燃機関1の燃費改善を意図した値(図2に破線で示す値)よりも大きい値(図2に二点鎖線で示す値)に変更される。このため、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大する際に、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関1の始動も生じにくくなる。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関1の始動開始とが重なることは抑制される。ちなみに、このように上記駆動軸3に作用するトルクが反転する期間と内燃機関1の始動開始とが重なることを抑制する際、上記期間を判別する必要はないため、そうした判別を的確に行えないことに起因して、上記期間と内燃機関1の始動が重なってしまうということはない。そして、上記期間と内燃機関1の始動開始との重なりが抑制されることで、上記トルクの反転時に内燃機関1の始動開始に伴い同機関1の出力トルクが急増することは抑制され、ひいては駆動軸3に作用する正トルクの急増も抑制される。従って、駆動軸3に作用する正トルクの急増によるショックの発生やギヤ機構の互いに噛み合うギヤ同士の歯打ち音の増大を抑制することができる。
【0030】
(2)上記閾値を内燃機関1の燃費が改善されるように車速に基づき可変設定すると、図2の破線で示されるように車速が高くなるほど上記閾値が小さくなるよう同閾値が車速に基づいて可変設定されることとなる。このときには、高車速領域において車速が高くなるほど上記閾値がより大きい値となるよう、同閾値を図2の二点鎖線で示すように車速に基づいて変更することが好ましい。ここで、車速が高くなるほど、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両を減速状態から加速させるとき、アクセル操作量が増大して、要求される走行パワーが大きくなりやすい傾向がある。こうした傾向のもとでも走行パワーが閾値以上になりにくくするうえでは、上記閾値を車速に応じて上述したように可変とすることが有効である。従って、車速に応じた閾値の上記可変を通じて走行パワーが閾値以上になりにくくなる。
【0031】
なお、上記実施形態は、例えば以下のように変更することもできる。
・高車速領域において、車速が増大するほど上記閾値が大きい値となるようにしたが、閾値は必ずしもこうした態様で可変とするものである必要はない。例えば、同閾値を高車速領域において一定値とするようにしてもよい。ただし、このときに一定値とされる閾値は、内燃機関1の燃費改善を意図した値(図2の破線で示される値)よりも大きい値とされる。
【0032】
・上記閾値を求めるためのマップとして、図2に破線に示される車速と閾値との関係を規定した第1マップと、図2に二点鎖線で示される車速と閾値との関係を規定した第2マップとの二種類のマップを用意し、低車速領域では第1マップを参照して上記閾値を求める一方、高車速領域では上記第2マップを参照して閾値を求めるようにしてもよい。
【0033】
・車速に基づく上記閾値の可変設定は、計算式を用いた車速に基づく計算で同閾値を求めることによって実現することも可能である。
【符号の説明】
【0034】
1…内燃機関、2…動力分割ギヤ機構、3…駆動軸、4…第1モータジェネレータ、5…第2モータジェネレータ、6…バッテリ、7…インバータ、8…アクセルペダル、9…アクセルポジションセンサ、10…車速センサ、11…車輪、12…カウンタギヤ、13…ファイナルギヤ、14…リダクションギヤ機構、15…電子制御装置。
【技術分野】
【0001】
本発明は、ハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
原動機としてモータ及び内燃機関を搭載したハイブリッド車両は、それら原動機の出力トルクをギヤ機構を介して車輪に伝達することにより走行する。こうしたハイブリッド車両では、原動機として搭載される内燃機関の燃費改善を意図して、同車両で要求される走行パワーが閾値未満であるときにはモータの駆動のみによる走行を行う一方、上記走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関を始動させるようにしている。
【0003】
上記ハイブリッド車両において、モータの駆動のみによる走行中に減速状態から加速される場合などには、モータの出力トルクの増大に伴って同車両の駆動軸に作用するトルクが車輪の回転と逆方向のトルク(負トルク)から車輪の回転と同方向のトルク(正トルク)に反転する。このように駆動軸に作用するトルクが反転すると、ギヤ機構における互いに噛み合うギヤ同士がバックラッシの分だけ相対回転し、その相対回転に伴って上記互いに噛み合うギヤ同士で歯打ち音が生じる。このときの歯打ち音を小さく抑えるため、特許文献1に示されるように、モータのみの駆動によるハイブリッド車両の走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、モータの出力トルクを緩やかに変化(増加)させることが提案されている。
【0004】
また、上述したようにモータの出力トルクを緩やかに変化させているとき、内燃機関が始動開始されて同機関の出力トルクが増大して駆動軸に作用する正トルクが急増すると、それに伴いショックが生じたり上記互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。このため、特許文献1では、上述したようにモータの出力トルクを緩やかに変化させているときには内燃機関の始動を禁止し、それによって上述したショックの発生や歯打ち音の増大を抑制するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−232993公報(段落[0027]〜[0035])
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1のように内燃機関の始動を禁止するためには、その禁止を行うべき期間としてモータの出力トルクの増大に伴い駆動軸に作用するトルクが負トルクから正トルクに反転する期間、すなわちモータの出力トルクを緩やかに増大させる期間を的確に判別しなければならない。
【0007】
しかし、こうした期間を必ずしも的確に判別できるとは限らず、その判別を的確に行うことができない場合には内燃機関の始動が禁止される期間を適正な期間とすることができない可能性がある。そして、内燃機関の始動が禁止される期間を適正な期間、すなわち駆動軸に作用するトルクが負トルクから正トルクに反転する期間とすることができない場合、その期間中に内燃機関が始動開始されるおそれがある。言い換えれば、モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なるおそれがある。
【0008】
そして、駆動軸に作用するトルクの負トルクから正トルクへの反転と内燃機関の始動開始とが重なると、内燃機関の始動開始に伴う同機関の出力トルクの増大によって駆動軸に作用する正トルクも急増し、それによってショックが生じたりギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0009】
本発明はこのような実情に鑑みてなされたものであって、その目的は、モータの駆動のみによる走行中に駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転と内燃機関の始動開始とが重なることを抑制できるハイブリッド車両の制御装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1記載の発明によれば、ハイブリッド車両に原動機として搭載されたモータ及び内燃機関の出力トルクがギヤ機構を介して車輪に伝達されると、それによって同ハイブリッド車両が走行するようになる。そして、ハイブリッド車両で要求される走行パワーが閾値未満であるときにはモータの駆動のみによる走行が行われる一方、走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関が始動される。ここで、上記閾値は、内燃機関の燃費改善を実現できるように車速に基づき設定手段によって可変設定される。ただし、このように閾値を車速に基づいて可変設定すると、高車速領域では上記閾値が小さくなる傾向がある。このことに起因して、高車速領域でのモータの駆動のみによるハイブリッド車両の走行中に、次のような状況が生じる可能性がある。
【0011】
すなわち、モータの駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴いモータの出力トルクが増大するとともに、上記走行パワーが閾値以上になって停止状態にある内燃機関が始動開始される。この場合、モータの出力トルク増大によってハイブリッド車両の駆動軸に作用するトルクが車輪の回転と逆方向のトルク(負トルク)から車輪の回転と同方向のトルク(正トルク)に反転するとともに、その反転が行われる期間と内燃機関の始動開始とが重なる。その結果、駆動軸に作用するトルクが負トルクから正トルクに反転する際、内燃機関の始動開始に伴い同機関の出力トルクが急増して上記駆動軸に作用する正トルクも急増する。そして、このように駆動軸に作用する正トルクが急増することで、ショックが生じたりギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0012】
こうした問題に対処するため、請求項1記載の発明では、高車速領域では上記閾値を設定手段により可変設定される値よりも大きい値に変更することが、変更手段を通じて行われる。このように高車速領域では上記閾値を大きい値に変更することにより、高車速領域でのモータの駆動のみによるハイブリッド車両の走行中に、上述したショックの発生や歯打ち音の増大といった問題が生じることを抑制できる。詳しくは、モータの駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴いモータの出力トルクが増大するとき、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関の始動も生じにくくなる。この場合、モータの出力トルク増大によってハイブリッド車両の駆動軸に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関の始動開始とが重なることは抑制される。ちなみに、このように上記駆動軸に作用するトルクが反転する期間と内燃機関の始動開始とが重なることを抑制する際、上記期間を判別する必要はないため、そうした判別を的確に行えないことに起因して、上記期間と内燃機関の始動が重なってしまうということはない。そして、上記期間と内燃機関の始動開始との重なりを抑制することで、上記トルクの反転時に内燃機関の始動開始に伴い同機関の出力トルクが急増することを抑制でき、ひいては駆動軸に作用する正トルクの急増も抑制できる。従って、駆動軸に作用する正トルクが急増することによる上記ショックの発生や上記歯打ち音の増大を抑制することができる。
【0013】
また、上記閾値を内燃機関の燃費が改善されるように車速に基づき可変設定すると、請求項2記載の発明のように、車速が高くなるほど上記閾値が小さくなるよう同閾値が車速に基づいて可変設定されることとなる。このときには、高車速領域において車速が高くなるほど上記閾値がより大きい値となるよう、変更手段を通じて同閾値を車速に基づいて変更することが好ましい。これは、車速が高くなるほど、モータの駆動のみによる走行中のハイブリッド車両を減速状態から加速させるとき、要求される走行パワーが大きくなりやすい傾向があり、そうした傾向のもとでも走行パワーが閾値以上になりにくくするうえで、その閾値を車速に応じて上述したように可変とすることが有効なためである。
【0014】
なお、上記設定手段及び上記変更手段としては、請求項3記載の発明のものを採用することが考えられる。この場合、上記設定手段としては、高車速領域よりも低い車速のとき、その車速に基づきマップを参照して上記閾値を設定するものが採用される。また、上記変更手段としては、高車速領域内の車速であるとき、その車速に基づきマップを参照して上記閾値を設定することで、同閾値を車速に基づいて上記設定手段により設定したと仮定した場合の閾値よりも大きい値とするものが採用される。
【図面の簡単な説明】
【0015】
【図1】本実施形態の制御装置が適用されるハイブリッド車両の構成を示す略図。
【図2】車速の変化に対する閾値の変化を示すグラフ。
【図3】第2モータジェネレータの駆動のみによるハイブリッド車両の走行中における内燃機関の始動手順を示すフローチャート。
【発明を実施するための形態】
【0016】
以下、本発明を内燃機関とモータとを原動機として搭載するハイブリッド車両の制御装置に具体化した一実施形態について、図1〜図3に従って説明する。
図1に示すハイブリッド車両において、内燃機関1から出力された動力は、遊星歯車等からなる動力分割ギヤ機構2により、同車両の駆動軸3に対しカウンタギヤ12及びファイナルギヤ13を介して伝達される動力と、第1モータジェネレータ4に伝達される動力とに分割される。また、ハイブリッド車両の駆動軸3には、第2モータジェネレータ5から出力される動力が、遊星歯車等からなるリダクションギヤ機構14、上記カウンタギヤ12、及び上記ファイナルギヤ13を介して伝達される。そして、駆動軸3への動力の伝達により同駆動軸3に繋がる車輪11が回転すると、ハイブリッド車両が走行するようになる。なお、上記動力分割ギヤ機構2、リダクションギヤ機構14、カウンタギヤ12、及びファイナルギヤ13は、ハイブリッド車両における原動機の出力トルクを駆動軸3及び車輪11に伝達するためのギヤ機構として機能する。
【0017】
上記第1モータジェネレータ4は、主に発電機として機能するが、内燃機関1の始動時などハイブリッド車両の運転状態によってはモータとしても機能する。また、上記第2モータジェネレータ5は、主にモータとして機能するが、ハイブリッド車両の減速時など同車両の運転状態によっては発電機としても機能する。そして、ハイブリッド車両には、バッテリ6と第1及び第2モータジェネレータ4,5との間での電力の入出力を制御するインバータ7が設けられている。このインバータ7は、例えば、主に発電機として機能する第1モータジェネレータ4での発電により得られる電力をバッテリ6に供給して同バッテリ6の充電を行うとともに、主にモータとして機能する第2モータジェネレータ5に対しバッテリ6からの電力供給を行う。
【0018】
ハイブリッド車両には、同車両に搭載された各種機器の制御を行う電子制御装置15が設けられている。この電子制御装置15は、上記各種機器の制御に係る演算処理を実行するCPU、その制御に必要なプログラムやデータの記憶されたROM、CPUの演算結果等が一時記憶されるRAM、外部との間で信号を入・出力するための入・出力ポート等を備えている。この電子制御装置15の入力ポートには、ハイブリッド車両の運転者によって操作されるアクセルペダル8の操作量(アクセル操作量)を検出するアクセルポジションセンサ9、及び、ハイブリッド車両の車速を検出する車速センサ10といった各種のセンサ等からの信号が入力される。一方、電子制御装置15の出力ポートには、内燃機関1を運転するための各種機器の駆動回路、第1モータジェネレータ4の駆動回路、第2モータジェネレータ5の駆動回路、及びインバータ7の駆動回路等が接続されている。
【0019】
電子制御装置15は、車速及びアクセル操作量といった運転状態に基づきハイブリッド車両で要求される走行パワーを求め、その求められた走行パワーが得られるよう内燃機関1から出力される動力や第2モータジェネレータ5から出力される動力を制御する。こうした内燃機関1及び第2モータジェネレータ5の制御は、それらの駆動に伴うエネルギ消費を可能な限り抑えることを考慮して行われる。例えば、ハイブリッド車両で要求される走行パワーが閾値未満であるときには、内燃機関1の燃費改善を意図して、第2モータジェネレータ5をモータとして機能させつつ内燃機関1の運転を停止させることで、第2モータジェネレータ5の駆動のみによる走行を行う。一方、上記要求される走行パワーが閾値以上になったときには、その走行パワーが速やかに得られるよう、第2モータジェネレータ5をモータとして機能させつつ、内燃機関1を始動させて同機関1の運転も行うことで、第2モータジェネレータ5と内燃機関1との併用による走行を行う。
【0020】
次に、内燃機関1を運転するか、或いは同運転を停止するかを決定するための上記閾値について詳しく説明する。
上記閾値は、内燃機関1の燃費改善を実現できるように車速に基づき可変設定される。このように可変設定される上記閾値は、例えば図2に破線で示すように、車速の増大に従って徐々に小さくなってゆき、高車速領域(図中における車速V0以上の領域)では小さい値になるという傾向がある。このように上記閾値が高車速領域で小さい値になることに起因して、高車速領域での第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中に、次のような状況が生じる可能性がある。
【0021】
すなわち、第2モータジェネレータ5の駆動のみによる走行中であって減速状態にあるハイブリッド車両が運転者のアクセルペダル8の踏み込みによって加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大するとともに、上記走行パワーが閾値以上になって停止状態にある内燃機関1が始動開始される。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが車輪11の回転と逆方向のトルク(負トルク)から車輪11の回転と同方向のトルク(正トルク)に反転するとともに、その反転が行われる期間と内燃機関1の始動開始とが重なる。
【0022】
上記駆動軸3に作用するトルクが負トルクから正トルクに反転すると、ギヤ機構(リダクションギヤ機構14、カウンタギヤ12、及びファイナルギヤ13等)における互いに噛み合うギヤ同士がバックラッシの分だけ相対回転し、その相対回転に伴って上記互いに噛み合うギヤ同士で歯打ち音が生じる。また、上記駆動軸3に作用するトルクの反転が行われる期間と内燃機関1の始動開始とが重なると、駆動軸3に作用するトルクが負トルクから正トルクに反転する際、内燃機関1の始動開始に伴い同機関1の出力トルクが急増して上記駆動軸3に作用する正トルクも急増する。そして、上記したように駆動軸3に作用する正トルクが急増することで、ショックが生じたり上記ギヤ機構における互いに噛み合うギヤ同士の歯打ち音が大きくなったりする。
【0023】
こうした問題に対処するため、本実施形態では、高車速領域では上記閾値を破線で示す値(内燃機関1の燃費改善を意図した値)よりも大きい値、例えば図中に二点鎖線で示す値に変更することが行われる。詳しくは、上記二点鎖線から明らかなように、車速が高くなるほど上記閾値がより大きい値となるよう同閾値が車速に基づいて変更される。このように高車速領域において、上記閾値を大きい値に変更することにより、高車速領域での第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中に、上述したショックの発生や歯打ち音の増大といった問題が生じることを抑制できる。
【0024】
詳しくは、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大する際に、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関1の始動も生じにくくなる。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関1の始動開始とが重なることは抑制される。その結果、上記トルクの反転時に内燃機関1の始動開始に伴い同機関1の出力トルクが急増することは抑制され、ひいては駆動軸3に作用する正トルクの急増も抑制される。従って、駆動軸3に作用する正トルクが急増することによる上記ショックの発生や上記歯打ち音の増大を抑制することができる。
【0025】
次に、第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における内燃機関1の始動について、機関始動ルーチンを示す図3のフローチャートを参照して説明する。この機関始動ルーチンは、電子制御装置15を通じて、例えば所定時間毎の時間割り込みにて周期的に実行される。
【0026】
同ルーチンにおいては、第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中であって、且つ内燃機関1の運転停止中であるか否かが判断される(S101)。ここで肯定判定であれば、内燃機関1の運転を開始するか、同運転の停止を維持するかの判断に用いられる上記閾値が、そのときの車速に基づきマップを参照して求められる(S102)。このマップにおいては、車速V0未満の低車速領域では図2に破線で示す車速と閾値との関係が規定されており、車速V0以上の高車速領域では図2に二点鎖線で示す車速と閾値との関係が規定されている。従って、このマップを参照して求められた閾値は、車速の変化に対し図2の実線で示すように推移する。
【0027】
なお、電子制御装置15は、低車速領域にて車速に基づき上記マップを参照して上記閾値を求める際には、その閾値を車速に基づき可変設定する設定手段として機能する。また、電子制御装置15は、高車速領域にて車速に基づき上記マップを参照して閾値を求める際には、その閾値を上記設定手段により可変設定される値(図2の破線)よりも大きい値(図2の二点鎖線)に変更する変更手段として機能する。
【0028】
上述したように閾値が求められた後、アクセル操作量及び車速から求められる走行パワー、すなわちハイブリッド車両で要求される走行パワーが上記閾値以上であるか否かが判断される(S103)。ここで否定判定であれば、内燃機関1の運転停止が維持される(S104)。一方、S103で肯定判定であれば、内燃機関1の始動が開始される(S105)。詳しくは、第1モータジェネレータ4により内燃機関1のクランキングが行われるとともに、その内燃機関1での燃料噴射や点火が開始されて同機関の自立運転が開始されるようになる。その結果、第2モータジェネレータ5と内燃機関1との併用により、ハイブリッド車両が走行する。
【0029】
以上詳述した本実施形態によれば、以下に示す効果が得られるようになる。
(1)第2モータジェネレータ5の駆動のみによるハイブリッド車両の走行中における高車速領域では、内燃機関1を始動開始するか否かの判断に用いられる閾値が、内燃機関1の燃費改善を意図した値(図2に破線で示す値)よりも大きい値(図2に二点鎖線で示す値)に変更される。このため、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両が減速状態から加速されるとき、要求される走行パワーの増大に伴い第2モータジェネレータ5の出力トルクが増大する際に、上記走行パワーが閾値以上になりにくくなることから、そのときに停止状態にある内燃機関1の始動も生じにくくなる。この場合、第2モータジェネレータ5の出力トルク増大によってハイブリッド車両の駆動軸3に作用するトルクが負トルクから正トルクに反転する際、その反転が行われる期間と内燃機関1の始動開始とが重なることは抑制される。ちなみに、このように上記駆動軸3に作用するトルクが反転する期間と内燃機関1の始動開始とが重なることを抑制する際、上記期間を判別する必要はないため、そうした判別を的確に行えないことに起因して、上記期間と内燃機関1の始動が重なってしまうということはない。そして、上記期間と内燃機関1の始動開始との重なりが抑制されることで、上記トルクの反転時に内燃機関1の始動開始に伴い同機関1の出力トルクが急増することは抑制され、ひいては駆動軸3に作用する正トルクの急増も抑制される。従って、駆動軸3に作用する正トルクの急増によるショックの発生やギヤ機構の互いに噛み合うギヤ同士の歯打ち音の増大を抑制することができる。
【0030】
(2)上記閾値を内燃機関1の燃費が改善されるように車速に基づき可変設定すると、図2の破線で示されるように車速が高くなるほど上記閾値が小さくなるよう同閾値が車速に基づいて可変設定されることとなる。このときには、高車速領域において車速が高くなるほど上記閾値がより大きい値となるよう、同閾値を図2の二点鎖線で示すように車速に基づいて変更することが好ましい。ここで、車速が高くなるほど、第2モータジェネレータ5の駆動のみによる走行中のハイブリッド車両を減速状態から加速させるとき、アクセル操作量が増大して、要求される走行パワーが大きくなりやすい傾向がある。こうした傾向のもとでも走行パワーが閾値以上になりにくくするうえでは、上記閾値を車速に応じて上述したように可変とすることが有効である。従って、車速に応じた閾値の上記可変を通じて走行パワーが閾値以上になりにくくなる。
【0031】
なお、上記実施形態は、例えば以下のように変更することもできる。
・高車速領域において、車速が増大するほど上記閾値が大きい値となるようにしたが、閾値は必ずしもこうした態様で可変とするものである必要はない。例えば、同閾値を高車速領域において一定値とするようにしてもよい。ただし、このときに一定値とされる閾値は、内燃機関1の燃費改善を意図した値(図2の破線で示される値)よりも大きい値とされる。
【0032】
・上記閾値を求めるためのマップとして、図2に破線に示される車速と閾値との関係を規定した第1マップと、図2に二点鎖線で示される車速と閾値との関係を規定した第2マップとの二種類のマップを用意し、低車速領域では第1マップを参照して上記閾値を求める一方、高車速領域では上記第2マップを参照して閾値を求めるようにしてもよい。
【0033】
・車速に基づく上記閾値の可変設定は、計算式を用いた車速に基づく計算で同閾値を求めることによって実現することも可能である。
【符号の説明】
【0034】
1…内燃機関、2…動力分割ギヤ機構、3…駆動軸、4…第1モータジェネレータ、5…第2モータジェネレータ、6…バッテリ、7…インバータ、8…アクセルペダル、9…アクセルポジションセンサ、10…車速センサ、11…車輪、12…カウンタギヤ、13…ファイナルギヤ、14…リダクションギヤ機構、15…電子制御装置。
【特許請求の範囲】
【請求項1】
原動機としてモータ及び内燃機関が搭載されており、それら原動機の出力トルクをギヤ機構を介して車輪に伝達することにより走行するハイブリッド車両に適用され、同車両で要求される走行パワーが閾値未満であるときには前記モータの駆動のみによる走行を行う一方、前記走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関を始動させるハイブリッド車両の制御装置において、
内燃機関の燃費を改善するために前記閾値を車速に基づき可変設定する設定手段と、
高車速領域では前記閾値を前記設定手段により可変設定される値よりも大きい値に変更する変更手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
前記設定手段は、車速が高くなるほど前記閾値が小さくなるよう、同車速に基づいて前記閾値を可変設定するものであり、
前記変更手段は、車速が高くなるほど前記閾値がより大きい値となるよう、同閾値を車速に基づいて変更するものである
請求項1記載のハイブリッド車両の制御装置。
【請求項3】
前記設定手段は、前記高車速領域よりも低い車速のとき、その車速に基づきマップを参照して前記閾値を設定するものであり、
前記変更手段は、前記高車速領域内の車速であるとき、その車速に基づきマップを参照して前記閾値を設定することで、同閾値を前記車速に基づいて前記設定手段により設定したと仮定した場合の閾値よりも大きい値とする
請求項1記載のハイブリッド車両の制御装置。
【請求項1】
原動機としてモータ及び内燃機関が搭載されており、それら原動機の出力トルクをギヤ機構を介して車輪に伝達することにより走行するハイブリッド車両に適用され、同車両で要求される走行パワーが閾値未満であるときには前記モータの駆動のみによる走行を行う一方、前記走行パワーが閾値以上になったときには内燃機関の駆動による走行を行うべく同機関を始動させるハイブリッド車両の制御装置において、
内燃機関の燃費を改善するために前記閾値を車速に基づき可変設定する設定手段と、
高車速領域では前記閾値を前記設定手段により可変設定される値よりも大きい値に変更する変更手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
前記設定手段は、車速が高くなるほど前記閾値が小さくなるよう、同車速に基づいて前記閾値を可変設定するものであり、
前記変更手段は、車速が高くなるほど前記閾値がより大きい値となるよう、同閾値を車速に基づいて変更するものである
請求項1記載のハイブリッド車両の制御装置。
【請求項3】
前記設定手段は、前記高車速領域よりも低い車速のとき、その車速に基づきマップを参照して前記閾値を設定するものであり、
前記変更手段は、前記高車速領域内の車速であるとき、その車速に基づきマップを参照して前記閾値を設定することで、同閾値を前記車速に基づいて前記設定手段により設定したと仮定した場合の閾値よりも大きい値とする
請求項1記載のハイブリッド車両の制御装置。
【図1】



【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−47062(P2013−47062A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−186217(P2011−186217)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]