
ハイブリッド車両の制御装置
【課題】減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えること。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
【解決手段】ハイブリッド車両の制御装置は、エンジンEngと、ベルト式無段変速機構3と、ローブレーキL/B又はハイクラッチH/Cと、モータ・ジェネレータM/Gと、左右駆動タイヤLT,RTと、統合コントローラ59と、を備える。ローブレーキL/B又はハイクラッチH/Cは、ベルト式無段変速機構3の下流側の位置に配置され、開放することにより動力伝達を遮断する。モータ・ジェネレータM/Gは、ローブレーキL/B又はハイクラッチH/Cの下流側の位置に配置され、駆動・回生に用いられる。統合コントローラ59は、エンジンEngへの燃料噴射を停止する減速要求時、ローブレーキL/B又はハイクラッチH/Cを開放した後、ベルト式無段変速機構3の変速比をロー側へ変速する減速時制御を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンから駆動入力される変速機より駆動輪側の下流位置にクラッチとモータ・ジェネレータを配置したハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
従来、ベルト式無段変速機より駆動輪側の下流位置に、駆動・回生用のモータ・ジェネレータを配置し、ベルト式無段変速機の出力軸とモータ・ジェネレータの間の位置にクラッチを配置した駆動系構成を持つハイブリッド車両が知られている(例えば、特許文献1参照)。
【0003】
このハイブリッド車両において、減速走行の際に回生するときは、クラッチを開放するとともに、エンジンを停止する。そして、エンジンを再始動するときは、ポンプ油圧が定常状態となった後、徐々にクラッチ締結を行うようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−199442号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のハイブリッド車両の制御装置にあっては、ドライバーの減速要求で回生を行っているとき、エンジンへの燃料供給が停止され、駆動輪からも駆動力が伝達されない。このため、エンジンは回生を開始すると直ちに回転が停止してしまう。このエンジン停止状態でドライバーがアクセル再踏み込み操作を行っても、エンジンが再始動するまでに長い時間を要し、ドライバーが要求する駆動力で車両が走行できるようになるまでの時間が長くなる、という問題があった。
【0006】
本発明は、上記問題に着目してなされたもので、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明のハイブリッド車両の制御装置では、エンジンと、変速機と、クラッチと、モータ・ジェネレータと、駆動輪と、減速時制御手段と、を備える手段とした。
前記変速機は、前記エンジンに連結され、ロー側とハイ側の変速比を有し変速する。
前記クラッチは、前記変速機の下流側の位置に配置され、開放することにより動力伝達を遮断する。
前記モータ・ジェネレータは、前記クラッチの下流側の位置に配置され、駆動・回生に用いられる。
前記駆動輪は、前記モータ・ジェネレータの下流側に連結される。
前記減速時制御手段は、前記エンジンへの燃料噴射を停止する減速要求時、前記クラッチを開放した後、前記変速機の変速比をロー側へ変速する。
【発明の効果】
【0008】
よって、エンジンへの燃料噴射を停止する減速要求時、減速時制御手段において、クラッチを開放した後、変速機の変速比がロー側へ変速される。
すなわち、変速機の変速比をロー側へ変速することで、変速機の入力軸の回転数が変速機の出力軸の回転数に対し相対的に高くなる。これにより、変速機の入力軸の回転による回転イナーシャが、入力軸に連結されたエンジンに伝わり、エンジン回転数の低下を遅らせる。つまり、クラッチを開放した状態でドライバーによるアクセル再踏み込み操作があっても、エンジンが回転している可能性が高くなり、エンジンの再始動に要する時間及びドライバーの要求駆動力で車両が走行するまでに要する時間を短縮する。
この結果、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の制御装置を搭載したハイブリッド車両を示す全体システム図である。
【図2】実施例1の制御装置を搭載したハイブリッド駆動系を示す概略図である。
【図3】実施例1の制御装置を搭載したハイブリッド駆動系に有する副変速機付き無段変速機の制御構成を示す制御ブロック図である。
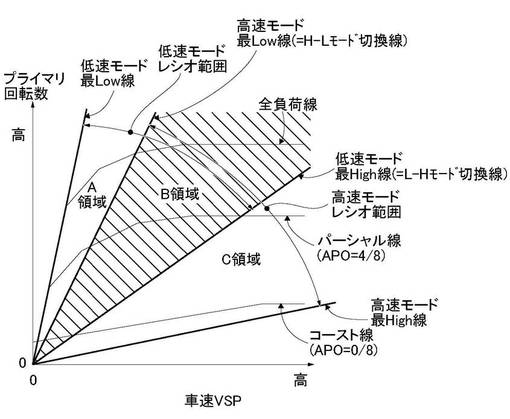
【図4】CVTコントローラによる副変速機付き無段変速機の変速制御による車速とアクセル開度とプライマリ回転数の関係の一例を示す変速線図である。
【図5】実施例1の統合コントローラにて実行される減速時制御処理の流れを示すフローチャートである。
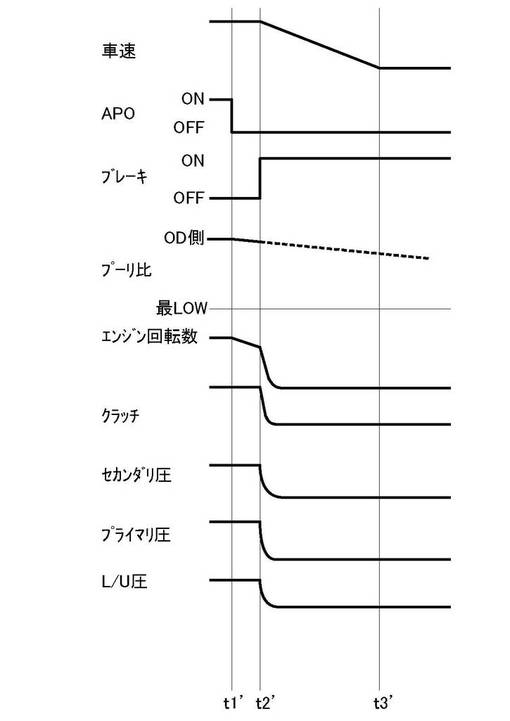
【図6】比較例の減速時制御による車速・アクセル開度・ブレーキ・プーリ比・エンジン回転数・クラッチ・セカンダリ圧・プライマリ圧・ロックアップ圧の各特性を示すタイムチャートである。
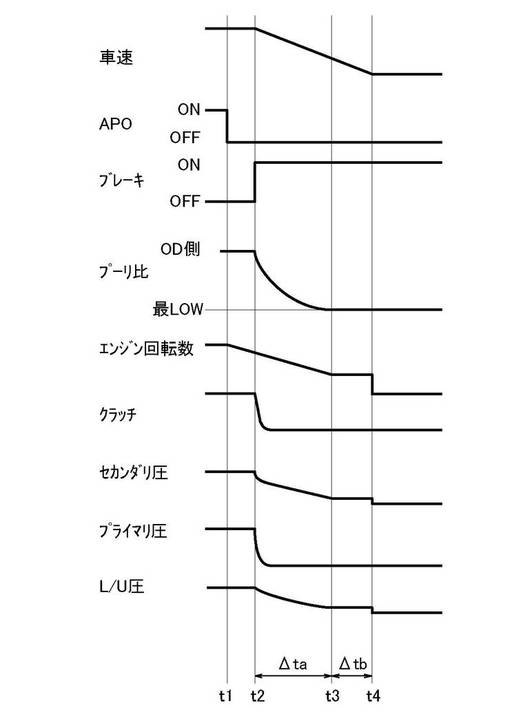
【図7】実施例1の減速時制御による車速・アクセル開度・ブレーキ・プーリ比・エンジン回転数・クラッチ・セカンダリ圧・プライマリ圧・ロックアップ圧の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0010】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
実施例1におけるハイブリッド車両の制御装置の構成を、「全体システム構成」、「ハイブリッド駆動系構成」、「副変速機付き無段変速機の制御構成」、「減速時制御構成」に分けて説明する。
【0012】
[全体システム構成]
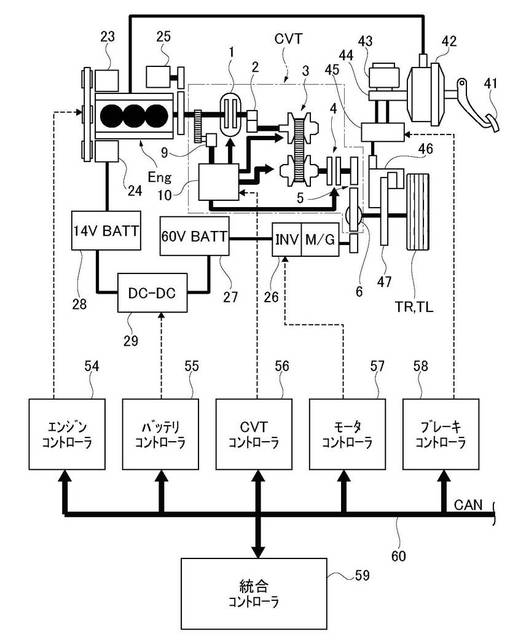
図1は、実施例1の制御装置を搭載したハイブリッド車両の全体システムを示す。以下、図1に基づき、全体システム構成を説明する。
【0013】
前記ハイブリッド車両の駆動系は、図1に示すように、エンジンEngと、副変速機付き無段変速機CVTと、ローブレーキL/B(クラッチ)と、ハイクラッチH/C(クラッチ)と、モータ・ジェネレータM/Gと、駆動タイヤTL,TR(駆動輪)と、を備えている。
【0014】
前記エンジンEngは、ガソリンエンジンやディーゼルエンジンであり、エンジンコントローラ54からの制御指令に基づいて、フューエルカット制御やアイドル回転制御等が行われる。なお、エンジン回転軸には、エアコン用コンプレッサ23と、オルタネータ24と、常時噛み合いスタータ25と、が連結されている。
【0015】
前記副変速機付き無段変速機CVTは、エンジンEngに連結され、無段階の変速比により変速するもので、CVTコントローラ56からの制御指令に基づいて、変速制御やロックアップ制御等が行われる。この副変速機付き無段変速機CVTは、トルクコンバータ1と、カウンターギア機構2と、ベルト式無段変速機構3(変速機)と、副変速機構4と、終減速ギア機構5と、差動機構6と、オイルポンプ9と、コントロールバルブユニット10と、を有する。
【0016】
前記ローブレーキL/B及びハイクラッチH/C(図2参照)は、副変速機構4に内部配置され、開放することにより動力伝達を遮断する。副変速機構4は、ベルト式無段変速機構3の下流側に配置されている。ここで、下流とは、トルクの発生源としてのエンジンEngを最上流としたときのトルク伝達経路における下流である。つまり、副変速機構4は、トルクの伝達経路において、ベルト式無段変速機構3を挟んでエンジンEngの反対側に配置されていることを示す。ローブレーキL/B及びハイクラッチH/Cの締結・開放制御は、CVTコントローラ56からの制御指令に基づいて行われる。
【0017】
前記モータ・ジェネレータM/Gは、ローブレーキL/B及びハイクラッチH/Cより下流側の差動機構6の位置に配置され、駆動・回生に用いられる。つまり、モータ・ジェネレータM/Gは、エンジンEngが生成したトルク伝達経路において、ローブレーキL/B及びハイクラッチH/Cを挟んで、エンジンEngの反対側に配置されている。このモータ・ジェネレータM/Gの制御は、モータコントローラ57からインバータ26への制御指令に基づいて行われる。モータ機能を発揮するモータ・ジェネレータM/Gの力行制御では、60Vバッテリ27からの電力の供給を受け、インバータ26により作り出された三相交流を印加する。ジェネレータ機能を発揮するモータ・ジェネレータM/Gの回生制御では、エンジンEng又は駆動タイヤTL,TRからの回転エネルギーを、電気エネルギーに変換し、インバータ26を介して60Vバッテリ27に充電する。なお、オルタネータ24には、14Vバッテリ28が連結されていて、14Vバッテリ28と60Vバッテリ27は、DC-DCコンバータ29により連結されている。DC-DCコンバータ29は、バッテリコントローラ56からの制御指令により互いのバッテリ充電容量を補完する。
【0018】
前記駆動タイヤTL,TRは、差動機構6から両側に延びる左右のドライブシャフトDSL,DSRの端部位置に設けられる。各ドライブシャフトDSL,DSRには、液圧制動系のブレーキディスク47が設けられる。なお、液圧制動系として、ブレーキペダル41と、負圧ブースタ42と、リザーバー43と、マスタシリンダ44と、ブレーキ液圧アクチュエータ45と、ホイールシリンダを内蔵したブレーキキャリパ46と、を備える。ブレーキ液圧アクチュエータ45は、ブレーキコントローラ58からの制御指令により液圧制動力を制御する。
【0019】
前記ハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ54と、バッテリコントローラ55と、CVTコントローラ56と、モータコントローラ57と、ブレーキコントローラ58と、統合コントローラ59と、を有して構成されている。なお、各コントローラ54,55,56,57,58と、統合コントローラ59とは、情報交換が互いに可能なCAN通信線60を介して接続されている。
【0020】
前記統合コントローラ59は、車両全体の消費エネルギーを管理し、最高効率で車両を走らせるための機能を担うものである。そして、統合コントローラ59での演算処理結果に基づいて、エンジンコントローラ54とバッテリコントローラ55とCVTコントローラ56とモータコントローラ57とブレーキコントローラ58へ制御指令を出力する。なお、実施例1の制動時制御処理は、この統合コントローラ59にて行われる。
【0021】
[ハイブリッド駆動系構成]
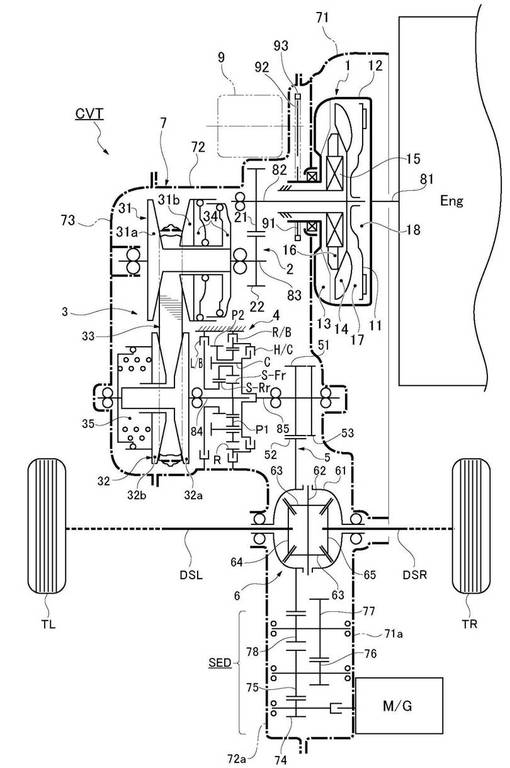
図2は、実施例1の制御装置を搭載したハイブリッド駆動系の概略を示す。以下、図2に基づき、ハイブリッド駆動系構成を説明する。
【0022】
前記ハイブリッド駆動系は、図2に示すように、副変速機付き無段変速機CVTを搭載したエンジン車の駆動系に対して、ハイブリッド化部品としてのモータ&減速ギアユニットSEDを追加することで構成している。すなわち、トルクコンバータ1と、カウンターギア機構2と、ベルト式無段変速機構3と、副変速機構4と、終減速ギア機構5と、差動機構6と、オイルポンプ9と、モータ&減速ギアユニットSEDと、を備えている。
なお、これらの構成要素は、コンバータハウジング71,トランスミッションケース72,サイドカバー73により構成された変速機ケーシング部材7に内蔵されている。
【0023】
前記トルクコンバータ1は、トルク増大機能を有する発進要素であり、トルク増大機能やトルク変動吸収機能を必要としないとき、同軸配置のエンジン出力軸81(=トルクコンバータ入力軸)とトルクコンバータ出力軸82を直結するロックアップクラッチ11を有する。このトルクコンバータ1は、エンジン出力軸81にコンバータカバー12を介して連結されたポンプインペラ13と、トルクコンバータ出力軸82に連結されたタービンランナ14と、ワンウェイクラッチ15を介して設けられたステータ16と、を構成要素とする。トルクコンバータ1の内部は、ロックアップクラッチ11によりコンバータ油室17とロックアップ油室18に画成される。
【0024】
前記カウンターギア機構2は、ベルト式無段変速機構3の上流位置に配置し、エンジンEngからの入力回転数を増速してプライマリプーリ回転数とする増速ギア機構である。このカウンターギア機構2は、エンジンEngからのトルクコンバータ出力軸82と、ベルト式無段変速機構3へのプライマリプーリ軸83を平行軸配置とし、トルクコンバータ出力軸82に設けた入力カウンターギア21と、プライマリプーリ軸83に設け、入力カウンターギア21に噛み合う出力カウンターギア22と、による構成としている。
【0025】
前記ベルト式無段変速機構3は、ベルト接触径の変化によりプライマリプーリ軸83の入力回転数とセカンダリプーリ軸84の出力回転数の比である変速比(=プーリ比)を無段階に変化させる無段変速機能を有する。このベルト式無段変速機構3は、プライマリプーリ31と、セカンダリプーリ32と、ベルト33と、を有する。プライマリプーリ31は、固定プーリ31aとスライドプーリ31bにより構成され、スライドプーリ31bは、プライマリ圧室34に導かれるプライマリ圧によりスライド動作する。セカンダリプーリ32は、固定プーリ32aとスライドプーリ32bにより構成され、スライドプーリ32bは、セカンダリ圧室35に導かれるセカンダリ圧によりスライド動作する。前記ベルト33は、プライマリプーリ31のV字形状をなすシーブ面と、セカンダリプーリ32のV字形状をなすシーブ面に掛け渡されている。このベルト33は、環状リングを内から外へ多数重ね合わせた2組の積層リングと、打ち抜き板材により形成され、2組の積層リングに対する挟み込みにより互いに連接して環状に設けられた多数のエレメントにより構成される。そして、エレメントには、両側位置にプーリシーブ面と接触するフランク面を有する。
【0026】
前記副変速機構4は、前進走行段として低速モードと高速モードを有し、後退走行段として後退モードを有し、これらのモードを運転状態に応じて切り換える変速機構である。この副変速機構4は、ラビニヨー型遊星歯車と変速用の摩擦要素により構成される。ラビニヨー型遊星歯車は、ダブルピニオン遊星歯車(S-Fr、P1、P2、R)とシングルピニオン遊星歯車(S-Rr、P1、R)を組み合わせた構成である。つまり、セカンダリプーリ軸84(=副変速機入力軸)に設けられ、第1ピニオンP1に噛み合うフロントサンギアS-Frと、第2ピニオンP2に噛み合うリヤサンギアS-Rrと、副変速機出力軸85に直結された共通キャリアCと、第2ピニオンP2に噛み合うリングギアRと、による4つの回転要素を有する。変速用の摩擦要素としては、低速モードの選択時に締結され、リヤサンギアS-Rrをケース固定可能なローブレーキL/Bと、高速モードの選択時に締結され、共通キャリアCとリングギアRを連結可能なハイクラッチH/Cと、後退モードの選択時に締結され、リングギアRをケース固定可能なリバースブレーキR/Bと、を有する。
なお、ローブレーキL/B及びハイクラッチH/Cは、副変速機付き無段変速機CVTの下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチに相当する構成である。そして、減速時制御においては、減速要求時に締結されているローブレーキL/B又はハイクラッチH/Cを開放する。
【0027】
前記終減速ギア機構5及び差動機構6は、副変速機構4の副変速機出力軸85からの出力回転を減速すると共に差動機能を与えて左右ドライブシャフトDSL,DSR及び左右駆動輪TL,TRに伝達する機構である。終減速ギア機構5は、副変速機出力軸85に設けられた第1ギア51と、差動機構6のデファレンシャルケース61に設けられ、第1ギア51と噛み合うデフギア52により構成されている。差動機構6は、デファレンシャルケース61に支持されたピニオンメートシャフト62と、ピニオンメートシャフト62に回転可能に設けられたピニオン63と、ピニオン63に噛み合うと共に左ドライブシャフトDSLが設けられた左サイドギア64と、ピニオン63に噛み合うと共に右ドライブシャフトDSRが設けられた右サイドギア65と、を有する。なお、副変速機出力軸85には、第1ギア51の隣接位置にパーキングギア53が設けられている。
【0028】
前記オイルポンプ9は、トランスミッションケース72の外周位置に設置されている。オイルポンプ9へのポンプ駆動伝達機構は、ポンプインペラ13の延長部分に設けた第1スプロケット91と、オイルポンプ9のポンプ軸に設けた第2スプロケット92と、両スプロケット91,92を掛け渡すチェーン93により構成されている。
【0029】
前記モータ&減速ギアユニットSEDは、図2に示すように、最終ギアである第3減速ギア78を、差動機構6のデファレンシャルケース61に設けられたデフギア52に噛み合わせることで設けられる。モータ&減速ギアユニットSEDの減速ギア機構は、モータ・ジェネレータM/Gの回転を3段階にて減速させるギア機構であり、第1減速ギア対74,75と第2減速ギア対76,77と第3減速ギア78を有して構成される。モータ・ジェネレータM/Gは、コンバータハウジング71の延長ハウジング部71aに固定される。減速ギア機構は、コンバータハウジング71の延長ハウジング部71aと、トランスミッションケース72の延長ケース部72aと、をフランジ結合したときの拡大空間部に配置される。なお、図2は、変速機ケーシング部材7の内部構成がわかるように、デフギア52に噛み合う第1ギア51と第3減速ギア78を180度離れた対向位置関係となるように展開スケルトンにて記載している。しかし、デフギア52に噛み合う第3減速ギア78の実際位置は、第1ギア51との噛み合い位置を除くギア周上位置であって、モータ&減速ギアユニットSEDをコンパクトにレイアウトできる位置に噛み合い配置される。
【0030】
[副変速機付き無段変速機の制御構成]
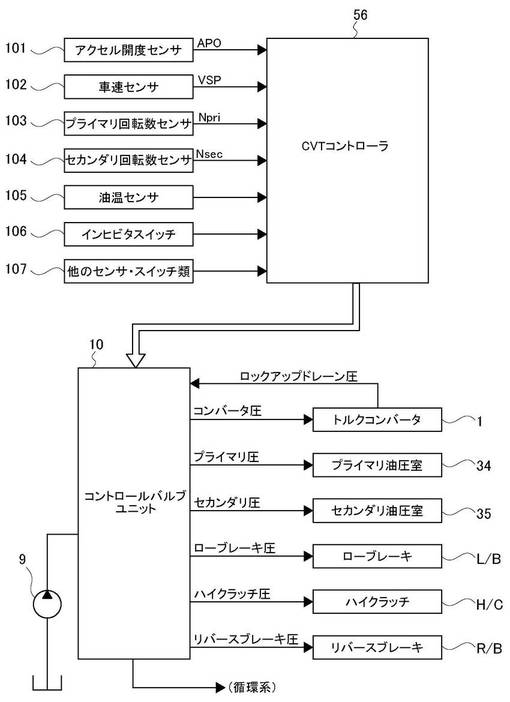
図3は、実施例1の制御装置を搭載したハイブリッド駆動系に有する副変速機付き無段変速機CVTの制御構成を示す。図4は、CVTコントローラによる副変速機付き無段変速機CVTの変速制御による車速とアクセル開度とプライマリ回転数の関係の一例を示す。以下、図3及び図4に基づき、副変速機付き無段変速機CVTの制御構成を説明する。
【0031】
前記副変速機付き無段変速機CVTの電子制御系は、図3に示すように、CVTコントローラ56と、CVTコントローラ56に入力情報をもたらす入力情報源により構成されている。CVTコントローラ56は、入力情報に基づく演算処理を行い、その演算処理結果を制御指令としてコントロールバルブユニット10の各アクチュエータに出力する。入力情報源としては、アクセル開度APOを検出するアクセル開度センサ101と、車速VSPを検出する車速センサ102と、ベルト式無段変速機構3のプライマリプーリ回転数Npriを検出するプライマリ回転数センサ103と、ベルト式無段変速機構3のセカンダリプーリ回転数Nsecを検出するセカンダリ回転数センサ104と、変速機作動油温を検出する油温センサ105と、ドライバーによるセレクト操作位置を検出するインヒビタースイッチ106と、他のセンサ・スイッチ類107と、を備えている。
【0032】
前記CVTコントロールユニット56は、トルクコンバータ1のロックアップクラッチ11を解放/締結するロックアップ制御を行う。すなわち、車速VSPとスロットル開度APOによる運転点が予め設定した非ロックアップ領域に存在する場合、ロックアップクラッチ11を解放し、車速VSPとスロットル開度APOによる運転点が予め設定したロックアップ領域に存在する場合、ロックアップクラッチ11を締結する。
【0033】
前記CVTコントロールユニット56は、ライン圧制御を行うと共にベルト式無段変速機構3の変速比制御を行う。すなわち、スロットル開度APO等に応じた目標ライン圧を得るライン圧制御を行うと共に、車速VSPとスロットル開度APOによる運転点と図4に示す変速線図により目標プライマリ回転数を決め、目標プライマリ回転数(=目標変速比)を得る変速比制御指令を出力する。
【0034】
前記CVTコントロールユニット56は、副変速機構4の変速制御を行う。すなわち、低速モードの選択時、車速VSPとスロットル開度APOによる運転点が図4に示す変速線図のA領域とB領域に存在する限り低速モードの選択を維持し、運転点が図4に示す変速線図の低速モード最High線(=L-Hモード切換線)を横切ると、低速モードから高速モードへ移行する制御指令を出す。また、高速モードの選択時、車速VSPとスロットル開度APOによる運転点が図4に示す変速線図のB領域とC領域に存在する限り高速モードの選択を維持し、運転点が図4に示す変速線図の高速モード最Low線(=H-Lモード切換線)を横切ると、高速モードから低速モードへ移行する制御指令を出す。
【0035】
前記油圧制御系は、オイルポンプ9と、オイルポンプ9から吐出圧に基づき様々な油圧を作り出すコントロールバルブユニット10により構成されている。コントロールバルブユニット10は、レギュレータ弁や変速制御弁や変速指令弁や減圧弁やロックアップコントロール弁等のスプール弁と共に、ライン圧ソレノイドやセカンダリ圧ソレノイドやステップモータやモード切り換えソレノイド等のアクチュエータを備えている。
【0036】
前記コントロールバルブユニット10は、トルクコンバータ1のロックアップ油圧制御を行う。すなわち、CVTコントローラ56からの非ロックアップ制御指令時、トルクコンバータ1のコンバータ油室17とロックアップ室18にコンバータ圧を導く。CVTコントローラ56からのロックアップ制御指令時、ロックアップ室18からのみコンバータ圧をドレーンする。
【0037】
前記コントロールバルブユニット10は、ベルト式無段変速機構3の変速比油圧制御を行う。すなわち、CVTコントローラ56からの変速比制御指令に応じ、プライマリ圧室34へプライマリ圧を導き、セカンダリ圧室35へセカンダリ圧を導き、ベルト式無段変速機構3により目標変速比を得る。
【0038】
前記コントロールバルブユニット10は、副変速機構4の変速油圧制御を行う。すなわち、CVTコントローラ56からの低速モード維持指令時には、副変速機構4のローブレーキL/Bに対しローブレーキ圧を導く。CVTコントローラ56からの高速モード維持指令時には、副変速機構4のハイクラッチH/Cに対しハイクラッチ圧を導く。CVTコントローラ56からの後退モード維持指令時には、副変速機構4のリバースブレーキR/Bに対しリバースブレーキ圧を導く。また、低速モード選択時にCVTコントローラ56から高速モードへの変速指令が出されると、ローブレーキL/Bのローブレーキ圧を抜きながら、ハイクラッチH/Cへハイクラッチ圧を供給する架け替え変速を行う。高速モード選択時にCVTコントローラ56から低速モードへの変速指令が出されると、ベルト式無段変速機構3の変速比をロー側(低速側)に変速するとともに、ハイクラッチH/Cのハイクラッチ圧を抜きながら、ローブレーキL/Bへローブレーキ圧を供給する架け替え変速を行う。
【0039】
[減速時制御構成]
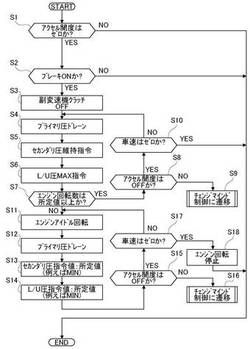
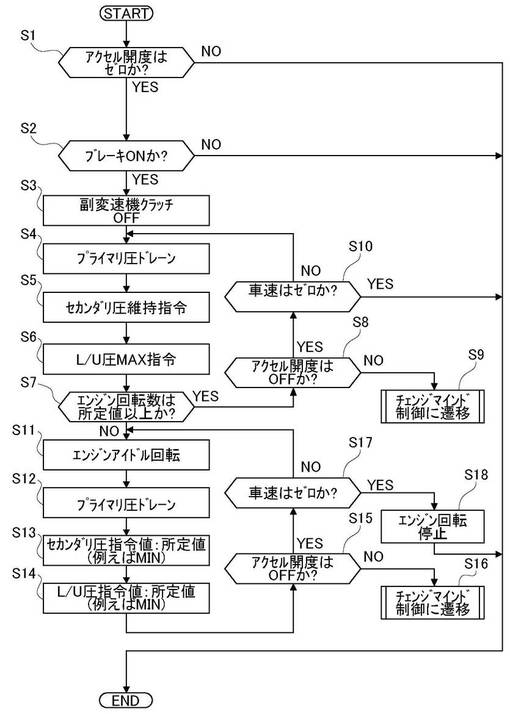
図5は、実施例1の統合コントローラ59にて実行される減速時制御処理の流れを示す(減速時制御手段)。以下、減速時制御構成をあらわす図5の各ステップについて説明する。
【0040】
ステップS1では、アクセル開度APOがゼロであるか否かを判断する。YES(APO=0)の場合はステップS2へ進み、NO(APO≠0)の場合はエンドへ進む。
ここで、アクセル開度APOがゼロになると、エンジンコントローラ54からのフューエルカット指令に基づき、エンジンEngへの燃料噴射が停止される。
【0041】
ステップS2では、ステップS1でのAPO=0であるとの判断に続き、ブレーキスイッチからの信号に基づき、ブレーキペダルへの踏み込み操作中(ブレーキON)であるか否かを判断する。YES(ブレーキON)の場合はステップS3へ進み、NO(ブレーキOFF)の場合はエンドへ進む。
ここで、アクセル開度APOがゼロで、かつ、ブレーキONという条件が成立すると、ブレーキペダルへの踏み込み操作量に応じた目標制動力(=要求制動力)を得るように、回生協調制御が開始される。回生協調制御では、回生可能量による回生制動力を与えたとき、目標制動力に対して回生制動力のみでは不足する制動力分を、液圧制動力で補うように制御する。そして、決められた制動力分担に応じて、モータコントローラ57から回生制御指令を出力し、ブレーキコントローラ58から液圧制御指令を出力する。
【0042】
ステップS3では、ステップS2でのブレーキONであるとの判断に続き、副変速機クラッチであり、そのときに締結されているローブレーキL/B又はハイクラッチH/Cを開放し、ステップS4へ進む。
【0043】
ステップS4では、ステップS3での副変速機クラッチOFF、あるいは、ステップS10でのVSP≠0であるとの判断に続き、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧をドレーンし、ステップS5へ進む。
【0044】
ステップS5では、ステップS4でのプライマリ圧ドレーンに続き、副変速機クラッチOFF時にセカンダリプーリ32のセカンダリ圧室35へ油圧を導くために出力した指令と同じ指令を出力し、ステップS6へ進む。すなわち、ステップS4,S5により、ベルト式無段変速機構3をロー側へ変速させる。
【0045】
ステップS6では、ステップS5でのセカンダリ圧維持指令(副変速機クラッチOFF時にセカンダリ圧室35へ油圧を導くために出力した指令と同じ指令)に続き、トルクコンバータ1のコンバータ油室17にロックアップ圧(=コンバータ圧)の最大値を導く指令を出力し、ステップS7へ進む。
【0046】
ステップS7では、ステップS6でのロックアップ圧MAX指令に続き、エンジン回転数は所定回転数以上であるか否かを判断する。YES(エンジン回転数≧所定回転数)の場合はステップS8へ進み、NO(エンジン回転数<所定回転数)の場合はステップS11へ進む。
ここで、「所定回転数」は、エンジンアイドル回転数相当に設定される。
【0047】
ステップS8では、ステップS7でのエンジン回転数≧所定回転数であるとの判断に続き、アクセル開度APOはアクセル足離し状態(=OFF)のままであるか否かを判断する。YES(APO=0)の場合はステップS10へ進み、NO(APO≠0)の場合はステップS9へ進む。
ここで、「APO=0」は、ドライバーによる減速要求の維持をあらわし、「APO≠0」は、ドライバーによる減速要求から再加速要求への変化をあらわす。
【0048】
ステップS9では、ステップS8でのAPO≠0であるとの判断に続き、再加速要求に合わせたチェンジマインド制御に遷移する。
ここで、「チェンジマインド制御」では、開放した副変速機クラッチを締結し、エンジン制御を、フューエルカット制御からアクセル開度APOに応じた燃料噴射による制御に移行する。そして、モータ制御を、回生制御から力行制御に移行し、変速制御を、アクセル開度APO等に応じた目標変速比を得る通常制御に移行する。
【0049】
ステップS10では、ステップS8でのAPO=0であるとの判断に続き、車速VSPはゼロであるか否かを判断する。YES(VSP=0)の場合はエンドへ進み、NO(VSP≠0)の場合はステップS4へ戻る。
【0050】
ステップS11では、ステップS7でのエンジン回転数<所定回転数であるとの判断、あるいは、ステップS17でのVSP≠0であるとの判断に続き、エンジンEngに対する燃料噴射を再開し、エンジンEngの自立運転によりエンジン回転数をアイドル回転数に維持し、ステップS12へ進む。
【0051】
ステップS12では、ステップS11でのエンジンアイドル回転に続き、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧をドレーンし、ステップS13へ進む。
【0052】
ステップS13では、ステップS12でのプライマリ圧ドレーンに続き、セカンダリプーリ32のセカンダリ圧室35に所定値(例えば、最小値)を導く指令(セカンダリ圧MIN指令)を出力し、ステップS14へ進む。
【0053】
ステップS14では、ステップS13でのセカンダリ圧MIN指令に続き、トルクコンバータ1のコンバータ油室17にロックアップ圧(=コンバータ圧)の所定値(例えば、最小値)を導く指令を出力し、ステップS15へ進む。
すなわち、ステップS11,S12,S13,S14により、自立運転によりエンジン回転数をアイドル回転数に維持しつつ、エンジン負荷を低く抑えながら、ベルト式無段変速機構3を最ロー変速比状態に維持する。
【0054】
ステップS15では、ステップS14での所定値によるロックアップ圧指令に続き、アクセル開度APOはアクセル足離し状態(=OFF)のままであるか否かを判断する。YES(APO=0)の場合はステップS17へ進み、NO(APO≠0)の場合はステップS16へ進む。
ここで、「APO=0」は、ドライバーによる減速要求の維持をあらわし、「APO≠0」は、ドライバーによる減速要求から再加速要求への変化をあらわす。
【0055】
ステップS16では、ステップS15でのAPO≠0であるとの判断に続き、再加速要求に合わせたチェンジマインド制御に遷移する。
ここで、「チェンジマインド制御」では、開放した副変速機クラッチを締結し、エンジン制御を、アイドル回転数制御からアクセル開度APOに応じた燃料噴射による制御に移行する。そして、モータ制御を、回生制御から力行制御に移行し、変速制御を、アクセル開度APO等に応じた目標変速比を得る通常制御に移行する。
【0056】
ステップS17では、ステップS15でのAPO=0であるとの判断に続き、車速VSPはゼロであるか否かを判断する。YES(VSP=0)の場合はステップS18へ進み、NO(VSP≠0)の場合はステップS11へ戻る。
【0057】
ステップS18では、ステップS17でのVSP=0であるとの判断に続き、車速VSPの停止に合わせて、エンジン回転を停止し、エンドへ進む。
【0058】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における作用を、「減速要求時におけるエンジン回転数低下速度の遅延作用」、「減速要求時におけるアイドル回転数の維持作用」、「減速時制御作用」に分けて説明する。
【0059】
[比較例の課題]
駆動系上流側から順に、エンジン、ベルト式無段変速機、クラッチ、モータ・ジェネレータ、駆動輪を配置した構成を持つハイブリッド車両とする。このハイブリッド車両において、アクセル足離し操作後にブレーキ操作を行って減速走行する際、クラッチを開放するとともに、エンジンを停止するが、ベルト式無段変速機の制御は行わない内容の減速時制御を行うものを比較例とする。
【0060】
この比較例の場合、図6のタイムチャートに示すように、時刻t1'にてアクセルオン状態からアクセルオフ状態にし、時刻t2'にてブレーキオフ状態からブレーキオン状態にする。このとき、時刻t1'にてアクセルオフ操作に伴いエンジンへの燃料噴射が停止され、時刻t2'にてクラッチの開放が開始される。この場合、エンジン回転数が時刻t1'から低下を開始し、時刻t2'からはエンジン回転数が急に低下し、時刻t2'の直後の時点でエンジン回転数がゼロであるエンジン停止状態となる。そして、時刻t3'にて車両が停止(車速=0)する。
【0061】
なお、時刻t2'以降のベルト式無段変速機は、制御としてノーコントロール状態であるため、プーリ比は、図6の点線特性に示すように不定となる。つまり、ベルト式無段変速機がエンジンからも駆動輪からも切り離された状態であり、かつ、エンジン停止に伴いポンプ油圧の発生が無く、プライマリ圧やセカンダリ圧が供給されない状態である。
【0062】
このエンジン停止状態でドライバーがアクセル再踏み込み操作を行うと、まず、停止しているエンジンを、スタータモータを使って再始動する必要があり、エンジンが再始動するまでに長い時間を要する。そして、エンジン再始動後、ポンプ油圧が定常状態となるのを待って、徐々にクラッチ締結を行う。このため、ドライバーが要求する駆動力で車両が走行できるようになるまでに長い時間を要する。
すなわち、比較例の減速時制御では、減速要求から再加速要求へ移行した場合、エンジン再始動や駆動輪へエンジン駆動力を伝達するまでに時間を要し、再踏み込み時の加速応答性が低い、という課題がある。
【0063】
上記課題に対し、モータ・ジェネレータの出力パワーを高いものとしておき、再踏み込み時の加速応答性を、モータ・ジェネレータの出力パワーにより達成することが考えられる。しかし、この場合、大出力パワーを持つ大型のモータ・ジェネレータを、ハイブリッド駆動系に配置する必要があるため、例えば、既存のエンジン車のエンジンルームの設計仕様のままでは、大型のモータ・ジェネレータを配置できないというように、モータレイアウトに課題がある。
【0064】
さらに、液圧制動系にエンジン負圧を利用する負圧ブースタを用いたシステムの場合には、エンジンが停止した後、ペダル踏力が急に増大するといように、ブレーキ操作違和感をドライバーに与えるという課題がある。
【0065】
[減速要求時におけるエンジン回転数低下速度の遅延作用]
上記比較例の課題を解決するには、減速時制御において、エンジン回転数の低下をできる限り抑制することが必要である。以下、これを反映する減速要求時におけるエンジン回転数低下速度の遅延作用を説明する。
【0066】
アクセル開度APOがゼロで、かつ、ブレーキONであると、図5のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6へと進む。ステップS3にて、そのとき締結されている副変速機クラッチが開放される。これによって、副変速機クラッチを挟んで上流側(エンジンEng及びベルト式無段変速機構3側)と下流側(モータ・ジェネレータM/G及び駆動タイヤTL,TR側)が切り離される。次のステップS4にて、プライマリ圧がドレーンされ、次のステップS5にてセカンダリ圧の維持指令が出力される。これによって、ベルト式無段変速機構3の変速比が最ローとなるように変速される。次のステップS5にて、ロックアップ圧の最大値指令が出力される。これによって、エンジンEngとベルト式無段変速機構3との間で動力を伝達する連結が確保される。
【0067】
このように、副変速機クラッチを挟んで駆動タイヤTL,TR側から切り離されたベルト式無段変速機構3の変速比を最ロー側へ変速することで、ベルト式無段変速機構3のプライマリプーリ31の回転数がセカンダリプーリ32の回転数に対し相対的に高くなる。これにより、ベルト式無段変速機構3のプーリ回転による回転イナーシャが、プライマリプーリ31にロックアップクラッチ11を介して連結されたエンジンEngに伝わり、エンジン回転数の低下を遅らせる。そして、再加速要求や車両停止がない限り、緩やかな勾配にて低下しているエンジン回転数がアイドル回転数相当より低くなるまでは、図5のフローチャートにおいて、ステップS4→ステップS5→ステップS6→ステップS7→ステップS8→ステップS10へと進む流れが繰り返される。
【0068】
この車両減速の途中でドライバーが再加速要求にしたがってアクセル再踏み込み操作を行うと、図5のフローチャートにおいて、ステップS8からステップS9へと進む。しかし、アクセル再踏み込み操作時にエンジンEngの回転数は、アイドル回転数相当以上であるため、エンジンEngを再始動させる必要がなく、チェンジマインド制御に遷移すると、直ちにドライバーの要求駆動力で車両走行に移行する。ちなみに、チェンジマインド制御に遷移すると、開放した副変速機クラッチが締結され、エンジン制御が、フューエルカット制御からアクセル開度APOに応じた燃料噴射による制御に移行し、モータ制御が、回生制御から力行制御に移行する。そして、変速制御が、最ロー変速比(最ロー変速比へ変速中であれば、その時点の変速比)からアクセル開度APO等に応じた目標変速比に変化する通常制御に移行する。
【0069】
上記のように、エンジンEngへの燃料噴射を停止する減速要求時、副変速機クラッチを開放した後、ベルト式無段変速機構3の変速比を最ロー側へ変速する減速時制御を行う構成を採用した。
したがって、減速要求中、エンジン回転数の低下を遅らせることで、再加速要求への移行に備えることができ、エンジンEngを用いた駆動力により再加速要求に応答良く応えられる。同時に、比較例のモータレイアウトの課題も解決され、エンジンEngの出力をアシストする小型のモータ・ジェネレータM/Gを採用できる。さらに、負圧ブースタ42を用いたシステムにおいて、ブレーキ操作違和感の課題も解決される。
【0070】
実施例1では、減速時制御において、エンジンEngへの燃料噴射を停止する減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行う構成を採用した。
この構成により、ベルト式無段変速機構3とモータ・ジェネレータM/Gが、副変速機クラッチの開放により切り離されることで、副変速機クラッチより上流側のエンジンEngやベルト式無段変速機構3が駆動タイヤTL,TRに連れ回されることはない。そして、図2に示すように、駆動タイヤTL,TRとモータ・ジェネレータM/Gが直結されることで、駆動タイヤTL,TRからの回転エネルギーが、モータ・ジェネレータM/Gにて効率良く電気エネルギーに変換される。
したがって、減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行うことで、高い回生効率で60Vバッテリ27への充電容量が確保される。
【0071】
実施例1では、減速時制御において、ベルト式無段変速機構3のプライマリプーリ31に供給されている作動油をドレーンし、セカンダリプーリ32のセカンダリ圧の維持指令を出力することで、ベルト式無段変速機構3の変速比を最ロー側へ変速する構成を採用した。
したがって、変速のための差推力を確保して変速を維持できる。
【0072】
[減速要求時におけるアイドル回転数の維持作用]
上記燃料噴射を停止しての減速時制御では、エンジン回転速度を遅くすることはできても長時間の経過によりいずれはエンジン停止に至る。そこで、エンジン回転数が所定値未満に低下してきたら自立運転によりエンジン回転数を維持することが必要である。以下、これを反映する減速要求時におけるアイドル回転数の維持作用を説明する。
【0073】
減速時制御中にエンジン回転数が所定値未満まで低下すると、図5のフローチャートにおいて、ステップS7からステップS11→ステップS12→ステップS13→ステップS14へと進む。ステップS11では、エンジンEngに対する燃料噴射が再開され、エンジンEngの自立運転によりエンジン回転数がアイドル回転数に維持される。次のステップS12では、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧がドレーンされ、次のステップS13では、セカンダリプーリ32のセカンダリ圧室35に最小値を導く指令が出力される。これにより、油圧負担を少なくして最ローの変速比が維持される。次のステップS14では、トルクコンバータ1のコンバータ油室17にロックアップ圧最小値を導く指令が出力される。これにより、エンジン負荷を低下させつつ、エンジンEngとの連結が維持される。
【0074】
このように、減速時制御中にエンジン回転数が所定値未満まで低下すると、油圧負担やエンジン負荷を抑えながら、自立運転によりエンジン回転数がアイドル回転数に維持される。そして、再加速要求や車両停止がない限り、エンジン回転数をアイドル回転数相当に維持しながら、図5のフローチャートにおいて、ステップS11→ステップS12→ステップS13→ステップS14→ステップS15→ステップS17へと進む流れが繰り返される。
【0075】
この車両減速の途中でドライバーが再加速要求にしたがってアクセル再踏み込み操作を行うと、図5のフローチャートにおいて、ステップS15からステップS16へと進む。しかし、アクセル再踏み込み操作時にエンジンEngの回転数は、アイドル回転数相当に維持されているため、エンジンEngを再始動させる必要がなく、チェンジマインド制御に遷移すると、直ちにドライバーの要求駆動力で車両走行に移行する。ちなみに、チェンジマインド制御に遷移すると、開放した副変速機クラッチが締結され、エンジン制御が、アイドル回転数制御からアクセル開度APOに応じた燃料噴射による制御に移行し、モータ制御が、回生制御から力行制御に移行する。そして、変速制御が、最ロー変速比(最ロー変速比へ変速中であれば、その時点の変速比)からアクセル開度APO等に応じた目標変速比に変化する通常制御に移行する。
【0076】
上記のように、実施例1では、減速時制御において、減速時制御開始後、エンジンEngの回転数がアイドル回転数相当まで低下すると、エンジンEngへの燃料噴射を再開し、自立運転によりエンジンEngの回転数をアイドル回転数相当に維持する構成を採用した。
したがって、減速時制御開始から長い時間が経過しても、エンジン回転数がアイドル回転数相当に維持されることで、減速要求から再加速要求への移行に備えることができ、エンジンEngを用いた駆動力により再加速要求に応答良く応えられる。
【0077】
[減速時制御作用]
図7のタイムチャートに基づき、アクセルオフ操作から車両停止までの減速時制御作用を説明する。
【0078】
実施例1の場合、図7のタイムチャートに示すように、時刻t1にてアクセルオン状態からアクセルオフ状態にし、時刻t2にてブレーキオフ状態からブレーキオン状態にする。このとき、時刻t1にてアクセルオフ操作に伴いエンジンへの燃料噴射が停止され、時刻t2にてクラッチの開放が開始されると共に、プーリ比を最ローとする変速制御が行われる。この変速制御では、プライマリ圧のドレーンにより時刻t2から圧力が急に低下し、セカンダリ圧やロックアップ圧は、エンジン回転数の低下にしたがったものとなる。
【0079】
したがって、時刻t1からエンジン回転数の低下を開始するが、時刻t2以降においてもエンジン回転数の低下勾配(低下速度)が、エンジンEng単独で回転している場合に比べ、緩やかとなり、時刻t2から時間間隔Δtaを経過した時刻t3の時点でエンジン回転数がアイドル回転数相当に到達する。そして、時刻t3から車両が停止する時刻t4までの時間間隔Δtbは、エンジン回転数がアイドル回転相当のままで維持される。
【0080】
すなわち、時刻t2から時刻t3までの時間間隔Δtaが、ベルト式無段変速機構3を最ロー側へ変速することによるエンジン回転低下速度の遅延効果をあらわす。また、時刻t3から時刻t4までの時間間隔Δtbが、エンジンEngの自立運転によるアイドル回転相当維持効果をあらわす。言い換えると、時刻t2から時刻t4までの間であれば、どのタイミングで再加速要求が介入してきても、応答良く再加速要求に応えることができる。
【0081】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0082】
(1) エンジンEngと、
エンジンEngに連結され、ロー側とハイ側の変速比を有する変速機(ベルト式無段変速機構3)と、
前記変速機(ベルト式無段変速機構3)の下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチ(ローブレーキL/B又はハイクラッチH/C)と、
前記クラッチ(ローブレーキL/B又はハイクラッチH/C)の下流側の位置に配置され、駆動・回生に用いられるモータ・ジェネレータM/Gと、
前記モータ・ジェネレータM/Gの下流側に連結される駆動輪(駆動タイヤLT,RT)と、
前記エンジンEngへの燃料噴射を停止する減速要求時、前記クラッチ(ローブレーキL/B又はハイクラッチH/C)を開放した後、前記変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する減速時制御手段(図5)と、
を備える。
このため、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができる。
【0083】
(2) 前記減速時制御手段(図5)は、前記エンジンEngへの燃料噴射を停止する減速要求時、回生要求に応じて前記モータ・ジェネレータM/Gによる回生を行う。
このため、(1)の効果に加え、減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行うことで、高い回生効率でバッテリ(60Vバッテリ27)への充電容量を確保することができる。
【0084】
(3) 前記変速機は、無段変速機(ベルト式無段変速機構3)であって、
前記減速時制御手段(図5)は、前記無段変速機(ベルト式無段変速機構3)のプライマリプーリ31に供給されている作動油をドレーンし、セカンダリプーリのセカンダリ圧の維持指令を出力することで、前記無段変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する(ステップS4,S5)。
このため、(1)又は(2)の効果に加え、無段変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する際、変速の差推力を確保して変速を維持することができる。
【0085】
(4) 前記減速時制御手段(図5)は、減速時制御開始後、前記エンジンEngの回転数がアイドル回転数相当まで低下すると、前記エンジンEngへの燃料噴射を再開し、自立運転により前記エンジンEngの回転数をアイドル回転数相当に維持する(ステップS11,S12,S13,S14)。
このため、(1)〜(3)の効果に加え、減速時制御開始からエンジン回転数がアイドル回転数相当まで低下するまでの時間経過があっても、減速要求から再加速要求への移行に備えることができる。
【0086】
(5) 前記無段変速機は、無段階の変速比により変速するベルト式無段変速機構3と、該ベルト式無段変速機構3の下流位置に配置され、複数の変速モードを切り換える副変速機構4と、を有する副変速機付き無段変速機CVTであり、
前記クラッチとして、前記副変速機構4の変速モードを切り換える摩擦締結要素(ローブレーキL/B、ハイクラッチH/C)のうち、減速要求時に締結されている摩擦締結要素を用いる(図2)。
このため、(1)〜(4)の効果に加え、副変速機付き無段変速機CVTに既存の摩擦締結要素(ローブレーキL/B、ハイクラッチH/C)を利用し、無段変速機(ベルト式無段変速機構3)とモータ・ジェネレータM/Gの間を切り離すことができる。
【0087】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0088】
実施例1では、変速機として、副変速機付き無段変速機CVTに有するベルト式無段変速機構3を用いる例を示した。しかし、変速機としては、ベルト式無段変速機構のみによるものを用い、クラッチを新たに付加するような例としても良い。また、無段変速機に代えて、有段式の変速機を用いるような例であっても良い。
【0089】
実施例1では、ハイブリッド駆動系として、副変速機付き無段変速機CVTを搭載したエンジン車の駆動系に対して、モータ&減速ギアユニットSEDを追加することで構成した例を示した。しかし、ハイブリッド駆動系として、駆動系上流側から順に、エンジン、変速機、クラッチ、モータ・ジェネレータ、駆動輪を配置した構成を持つものであれば、本発明のハイブリッド車両の制御装置を適用することができる。さらに、ハイブリッド駆動系として、駆動系上流側から順に、エンジン、変速機、クラッチ、駆動輪を配置し、且つ、クラッチの下流側にモータ・ジェネレータを配置し、且つ、モータ・ジェネレータを、変速機を介さずに駆動輪に連結したものであれば、本発明のハイブリッド車両の制御装置を適用することができる。
【符号の説明】
【0090】
Eng エンジン
CVT 副変速機付き無段変速機
M/G モータ・ジェネレータ
DSL 左ドライブシャフト
DSR 右ドライブシャフト
TL 左駆動タイヤ(駆動輪)
TR 右駆動タイヤ(駆動輪)
1 トルクコンバータ
2 カウンターギア機構
3 ベルト式無段変速機構(変速機)
31 プライマリプーリ
32 セカンダリプーリ
33 ベルト
4 副変速機構
L/B ローブレーキ(クラッチ、摩擦締結要素)
H/C ハイクラッチ(クラッチ、摩擦締結要素)
5 終減速ギア機構
6 差動機構
54 エンジンコントローラ
55 バッテリコントローラ
56 CVTコントローラ
57 モータコントローラ
58 ブレーキコントローラ
59 統合コントローラ
【技術分野】
【0001】
本発明は、エンジンから駆動入力される変速機より駆動輪側の下流位置にクラッチとモータ・ジェネレータを配置したハイブリッド車両の制御装置に関する。
【背景技術】
【0002】
従来、ベルト式無段変速機より駆動輪側の下流位置に、駆動・回生用のモータ・ジェネレータを配置し、ベルト式無段変速機の出力軸とモータ・ジェネレータの間の位置にクラッチを配置した駆動系構成を持つハイブリッド車両が知られている(例えば、特許文献1参照)。
【0003】
このハイブリッド車両において、減速走行の際に回生するときは、クラッチを開放するとともに、エンジンを停止する。そして、エンジンを再始動するときは、ポンプ油圧が定常状態となった後、徐々にクラッチ締結を行うようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−199442号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のハイブリッド車両の制御装置にあっては、ドライバーの減速要求で回生を行っているとき、エンジンへの燃料供給が停止され、駆動輪からも駆動力が伝達されない。このため、エンジンは回生を開始すると直ちに回転が停止してしまう。このエンジン停止状態でドライバーがアクセル再踏み込み操作を行っても、エンジンが再始動するまでに長い時間を要し、ドライバーが要求する駆動力で車両が走行できるようになるまでの時間が長くなる、という問題があった。
【0006】
本発明は、上記問題に着目してなされたもので、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができるハイブリッド車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明のハイブリッド車両の制御装置では、エンジンと、変速機と、クラッチと、モータ・ジェネレータと、駆動輪と、減速時制御手段と、を備える手段とした。
前記変速機は、前記エンジンに連結され、ロー側とハイ側の変速比を有し変速する。
前記クラッチは、前記変速機の下流側の位置に配置され、開放することにより動力伝達を遮断する。
前記モータ・ジェネレータは、前記クラッチの下流側の位置に配置され、駆動・回生に用いられる。
前記駆動輪は、前記モータ・ジェネレータの下流側に連結される。
前記減速時制御手段は、前記エンジンへの燃料噴射を停止する減速要求時、前記クラッチを開放した後、前記変速機の変速比をロー側へ変速する。
【発明の効果】
【0008】
よって、エンジンへの燃料噴射を停止する減速要求時、減速時制御手段において、クラッチを開放した後、変速機の変速比がロー側へ変速される。
すなわち、変速機の変速比をロー側へ変速することで、変速機の入力軸の回転数が変速機の出力軸の回転数に対し相対的に高くなる。これにより、変速機の入力軸の回転による回転イナーシャが、入力軸に連結されたエンジンに伝わり、エンジン回転数の低下を遅らせる。つまり、クラッチを開放した状態でドライバーによるアクセル再踏み込み操作があっても、エンジンが回転している可能性が高くなり、エンジンの再始動に要する時間及びドライバーの要求駆動力で車両が走行するまでに要する時間を短縮する。
この結果、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の制御装置を搭載したハイブリッド車両を示す全体システム図である。
【図2】実施例1の制御装置を搭載したハイブリッド駆動系を示す概略図である。
【図3】実施例1の制御装置を搭載したハイブリッド駆動系に有する副変速機付き無段変速機の制御構成を示す制御ブロック図である。
【図4】CVTコントローラによる副変速機付き無段変速機の変速制御による車速とアクセル開度とプライマリ回転数の関係の一例を示す変速線図である。
【図5】実施例1の統合コントローラにて実行される減速時制御処理の流れを示すフローチャートである。
【図6】比較例の減速時制御による車速・アクセル開度・ブレーキ・プーリ比・エンジン回転数・クラッチ・セカンダリ圧・プライマリ圧・ロックアップ圧の各特性を示すタイムチャートである。
【図7】実施例1の減速時制御による車速・アクセル開度・ブレーキ・プーリ比・エンジン回転数・クラッチ・セカンダリ圧・プライマリ圧・ロックアップ圧の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0010】
以下、本発明のハイブリッド車両の制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0011】
まず、構成を説明する。
実施例1におけるハイブリッド車両の制御装置の構成を、「全体システム構成」、「ハイブリッド駆動系構成」、「副変速機付き無段変速機の制御構成」、「減速時制御構成」に分けて説明する。
【0012】
[全体システム構成]
図1は、実施例1の制御装置を搭載したハイブリッド車両の全体システムを示す。以下、図1に基づき、全体システム構成を説明する。
【0013】
前記ハイブリッド車両の駆動系は、図1に示すように、エンジンEngと、副変速機付き無段変速機CVTと、ローブレーキL/B(クラッチ)と、ハイクラッチH/C(クラッチ)と、モータ・ジェネレータM/Gと、駆動タイヤTL,TR(駆動輪)と、を備えている。
【0014】
前記エンジンEngは、ガソリンエンジンやディーゼルエンジンであり、エンジンコントローラ54からの制御指令に基づいて、フューエルカット制御やアイドル回転制御等が行われる。なお、エンジン回転軸には、エアコン用コンプレッサ23と、オルタネータ24と、常時噛み合いスタータ25と、が連結されている。
【0015】
前記副変速機付き無段変速機CVTは、エンジンEngに連結され、無段階の変速比により変速するもので、CVTコントローラ56からの制御指令に基づいて、変速制御やロックアップ制御等が行われる。この副変速機付き無段変速機CVTは、トルクコンバータ1と、カウンターギア機構2と、ベルト式無段変速機構3(変速機)と、副変速機構4と、終減速ギア機構5と、差動機構6と、オイルポンプ9と、コントロールバルブユニット10と、を有する。
【0016】
前記ローブレーキL/B及びハイクラッチH/C(図2参照)は、副変速機構4に内部配置され、開放することにより動力伝達を遮断する。副変速機構4は、ベルト式無段変速機構3の下流側に配置されている。ここで、下流とは、トルクの発生源としてのエンジンEngを最上流としたときのトルク伝達経路における下流である。つまり、副変速機構4は、トルクの伝達経路において、ベルト式無段変速機構3を挟んでエンジンEngの反対側に配置されていることを示す。ローブレーキL/B及びハイクラッチH/Cの締結・開放制御は、CVTコントローラ56からの制御指令に基づいて行われる。
【0017】
前記モータ・ジェネレータM/Gは、ローブレーキL/B及びハイクラッチH/Cより下流側の差動機構6の位置に配置され、駆動・回生に用いられる。つまり、モータ・ジェネレータM/Gは、エンジンEngが生成したトルク伝達経路において、ローブレーキL/B及びハイクラッチH/Cを挟んで、エンジンEngの反対側に配置されている。このモータ・ジェネレータM/Gの制御は、モータコントローラ57からインバータ26への制御指令に基づいて行われる。モータ機能を発揮するモータ・ジェネレータM/Gの力行制御では、60Vバッテリ27からの電力の供給を受け、インバータ26により作り出された三相交流を印加する。ジェネレータ機能を発揮するモータ・ジェネレータM/Gの回生制御では、エンジンEng又は駆動タイヤTL,TRからの回転エネルギーを、電気エネルギーに変換し、インバータ26を介して60Vバッテリ27に充電する。なお、オルタネータ24には、14Vバッテリ28が連結されていて、14Vバッテリ28と60Vバッテリ27は、DC-DCコンバータ29により連結されている。DC-DCコンバータ29は、バッテリコントローラ56からの制御指令により互いのバッテリ充電容量を補完する。
【0018】
前記駆動タイヤTL,TRは、差動機構6から両側に延びる左右のドライブシャフトDSL,DSRの端部位置に設けられる。各ドライブシャフトDSL,DSRには、液圧制動系のブレーキディスク47が設けられる。なお、液圧制動系として、ブレーキペダル41と、負圧ブースタ42と、リザーバー43と、マスタシリンダ44と、ブレーキ液圧アクチュエータ45と、ホイールシリンダを内蔵したブレーキキャリパ46と、を備える。ブレーキ液圧アクチュエータ45は、ブレーキコントローラ58からの制御指令により液圧制動力を制御する。
【0019】
前記ハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ54と、バッテリコントローラ55と、CVTコントローラ56と、モータコントローラ57と、ブレーキコントローラ58と、統合コントローラ59と、を有して構成されている。なお、各コントローラ54,55,56,57,58と、統合コントローラ59とは、情報交換が互いに可能なCAN通信線60を介して接続されている。
【0020】
前記統合コントローラ59は、車両全体の消費エネルギーを管理し、最高効率で車両を走らせるための機能を担うものである。そして、統合コントローラ59での演算処理結果に基づいて、エンジンコントローラ54とバッテリコントローラ55とCVTコントローラ56とモータコントローラ57とブレーキコントローラ58へ制御指令を出力する。なお、実施例1の制動時制御処理は、この統合コントローラ59にて行われる。
【0021】
[ハイブリッド駆動系構成]
図2は、実施例1の制御装置を搭載したハイブリッド駆動系の概略を示す。以下、図2に基づき、ハイブリッド駆動系構成を説明する。
【0022】
前記ハイブリッド駆動系は、図2に示すように、副変速機付き無段変速機CVTを搭載したエンジン車の駆動系に対して、ハイブリッド化部品としてのモータ&減速ギアユニットSEDを追加することで構成している。すなわち、トルクコンバータ1と、カウンターギア機構2と、ベルト式無段変速機構3と、副変速機構4と、終減速ギア機構5と、差動機構6と、オイルポンプ9と、モータ&減速ギアユニットSEDと、を備えている。
なお、これらの構成要素は、コンバータハウジング71,トランスミッションケース72,サイドカバー73により構成された変速機ケーシング部材7に内蔵されている。
【0023】
前記トルクコンバータ1は、トルク増大機能を有する発進要素であり、トルク増大機能やトルク変動吸収機能を必要としないとき、同軸配置のエンジン出力軸81(=トルクコンバータ入力軸)とトルクコンバータ出力軸82を直結するロックアップクラッチ11を有する。このトルクコンバータ1は、エンジン出力軸81にコンバータカバー12を介して連結されたポンプインペラ13と、トルクコンバータ出力軸82に連結されたタービンランナ14と、ワンウェイクラッチ15を介して設けられたステータ16と、を構成要素とする。トルクコンバータ1の内部は、ロックアップクラッチ11によりコンバータ油室17とロックアップ油室18に画成される。
【0024】
前記カウンターギア機構2は、ベルト式無段変速機構3の上流位置に配置し、エンジンEngからの入力回転数を増速してプライマリプーリ回転数とする増速ギア機構である。このカウンターギア機構2は、エンジンEngからのトルクコンバータ出力軸82と、ベルト式無段変速機構3へのプライマリプーリ軸83を平行軸配置とし、トルクコンバータ出力軸82に設けた入力カウンターギア21と、プライマリプーリ軸83に設け、入力カウンターギア21に噛み合う出力カウンターギア22と、による構成としている。
【0025】
前記ベルト式無段変速機構3は、ベルト接触径の変化によりプライマリプーリ軸83の入力回転数とセカンダリプーリ軸84の出力回転数の比である変速比(=プーリ比)を無段階に変化させる無段変速機能を有する。このベルト式無段変速機構3は、プライマリプーリ31と、セカンダリプーリ32と、ベルト33と、を有する。プライマリプーリ31は、固定プーリ31aとスライドプーリ31bにより構成され、スライドプーリ31bは、プライマリ圧室34に導かれるプライマリ圧によりスライド動作する。セカンダリプーリ32は、固定プーリ32aとスライドプーリ32bにより構成され、スライドプーリ32bは、セカンダリ圧室35に導かれるセカンダリ圧によりスライド動作する。前記ベルト33は、プライマリプーリ31のV字形状をなすシーブ面と、セカンダリプーリ32のV字形状をなすシーブ面に掛け渡されている。このベルト33は、環状リングを内から外へ多数重ね合わせた2組の積層リングと、打ち抜き板材により形成され、2組の積層リングに対する挟み込みにより互いに連接して環状に設けられた多数のエレメントにより構成される。そして、エレメントには、両側位置にプーリシーブ面と接触するフランク面を有する。
【0026】
前記副変速機構4は、前進走行段として低速モードと高速モードを有し、後退走行段として後退モードを有し、これらのモードを運転状態に応じて切り換える変速機構である。この副変速機構4は、ラビニヨー型遊星歯車と変速用の摩擦要素により構成される。ラビニヨー型遊星歯車は、ダブルピニオン遊星歯車(S-Fr、P1、P2、R)とシングルピニオン遊星歯車(S-Rr、P1、R)を組み合わせた構成である。つまり、セカンダリプーリ軸84(=副変速機入力軸)に設けられ、第1ピニオンP1に噛み合うフロントサンギアS-Frと、第2ピニオンP2に噛み合うリヤサンギアS-Rrと、副変速機出力軸85に直結された共通キャリアCと、第2ピニオンP2に噛み合うリングギアRと、による4つの回転要素を有する。変速用の摩擦要素としては、低速モードの選択時に締結され、リヤサンギアS-Rrをケース固定可能なローブレーキL/Bと、高速モードの選択時に締結され、共通キャリアCとリングギアRを連結可能なハイクラッチH/Cと、後退モードの選択時に締結され、リングギアRをケース固定可能なリバースブレーキR/Bと、を有する。
なお、ローブレーキL/B及びハイクラッチH/Cは、副変速機付き無段変速機CVTの下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチに相当する構成である。そして、減速時制御においては、減速要求時に締結されているローブレーキL/B又はハイクラッチH/Cを開放する。
【0027】
前記終減速ギア機構5及び差動機構6は、副変速機構4の副変速機出力軸85からの出力回転を減速すると共に差動機能を与えて左右ドライブシャフトDSL,DSR及び左右駆動輪TL,TRに伝達する機構である。終減速ギア機構5は、副変速機出力軸85に設けられた第1ギア51と、差動機構6のデファレンシャルケース61に設けられ、第1ギア51と噛み合うデフギア52により構成されている。差動機構6は、デファレンシャルケース61に支持されたピニオンメートシャフト62と、ピニオンメートシャフト62に回転可能に設けられたピニオン63と、ピニオン63に噛み合うと共に左ドライブシャフトDSLが設けられた左サイドギア64と、ピニオン63に噛み合うと共に右ドライブシャフトDSRが設けられた右サイドギア65と、を有する。なお、副変速機出力軸85には、第1ギア51の隣接位置にパーキングギア53が設けられている。
【0028】
前記オイルポンプ9は、トランスミッションケース72の外周位置に設置されている。オイルポンプ9へのポンプ駆動伝達機構は、ポンプインペラ13の延長部分に設けた第1スプロケット91と、オイルポンプ9のポンプ軸に設けた第2スプロケット92と、両スプロケット91,92を掛け渡すチェーン93により構成されている。
【0029】
前記モータ&減速ギアユニットSEDは、図2に示すように、最終ギアである第3減速ギア78を、差動機構6のデファレンシャルケース61に設けられたデフギア52に噛み合わせることで設けられる。モータ&減速ギアユニットSEDの減速ギア機構は、モータ・ジェネレータM/Gの回転を3段階にて減速させるギア機構であり、第1減速ギア対74,75と第2減速ギア対76,77と第3減速ギア78を有して構成される。モータ・ジェネレータM/Gは、コンバータハウジング71の延長ハウジング部71aに固定される。減速ギア機構は、コンバータハウジング71の延長ハウジング部71aと、トランスミッションケース72の延長ケース部72aと、をフランジ結合したときの拡大空間部に配置される。なお、図2は、変速機ケーシング部材7の内部構成がわかるように、デフギア52に噛み合う第1ギア51と第3減速ギア78を180度離れた対向位置関係となるように展開スケルトンにて記載している。しかし、デフギア52に噛み合う第3減速ギア78の実際位置は、第1ギア51との噛み合い位置を除くギア周上位置であって、モータ&減速ギアユニットSEDをコンパクトにレイアウトできる位置に噛み合い配置される。
【0030】
[副変速機付き無段変速機の制御構成]
図3は、実施例1の制御装置を搭載したハイブリッド駆動系に有する副変速機付き無段変速機CVTの制御構成を示す。図4は、CVTコントローラによる副変速機付き無段変速機CVTの変速制御による車速とアクセル開度とプライマリ回転数の関係の一例を示す。以下、図3及び図4に基づき、副変速機付き無段変速機CVTの制御構成を説明する。
【0031】
前記副変速機付き無段変速機CVTの電子制御系は、図3に示すように、CVTコントローラ56と、CVTコントローラ56に入力情報をもたらす入力情報源により構成されている。CVTコントローラ56は、入力情報に基づく演算処理を行い、その演算処理結果を制御指令としてコントロールバルブユニット10の各アクチュエータに出力する。入力情報源としては、アクセル開度APOを検出するアクセル開度センサ101と、車速VSPを検出する車速センサ102と、ベルト式無段変速機構3のプライマリプーリ回転数Npriを検出するプライマリ回転数センサ103と、ベルト式無段変速機構3のセカンダリプーリ回転数Nsecを検出するセカンダリ回転数センサ104と、変速機作動油温を検出する油温センサ105と、ドライバーによるセレクト操作位置を検出するインヒビタースイッチ106と、他のセンサ・スイッチ類107と、を備えている。
【0032】
前記CVTコントロールユニット56は、トルクコンバータ1のロックアップクラッチ11を解放/締結するロックアップ制御を行う。すなわち、車速VSPとスロットル開度APOによる運転点が予め設定した非ロックアップ領域に存在する場合、ロックアップクラッチ11を解放し、車速VSPとスロットル開度APOによる運転点が予め設定したロックアップ領域に存在する場合、ロックアップクラッチ11を締結する。
【0033】
前記CVTコントロールユニット56は、ライン圧制御を行うと共にベルト式無段変速機構3の変速比制御を行う。すなわち、スロットル開度APO等に応じた目標ライン圧を得るライン圧制御を行うと共に、車速VSPとスロットル開度APOによる運転点と図4に示す変速線図により目標プライマリ回転数を決め、目標プライマリ回転数(=目標変速比)を得る変速比制御指令を出力する。
【0034】
前記CVTコントロールユニット56は、副変速機構4の変速制御を行う。すなわち、低速モードの選択時、車速VSPとスロットル開度APOによる運転点が図4に示す変速線図のA領域とB領域に存在する限り低速モードの選択を維持し、運転点が図4に示す変速線図の低速モード最High線(=L-Hモード切換線)を横切ると、低速モードから高速モードへ移行する制御指令を出す。また、高速モードの選択時、車速VSPとスロットル開度APOによる運転点が図4に示す変速線図のB領域とC領域に存在する限り高速モードの選択を維持し、運転点が図4に示す変速線図の高速モード最Low線(=H-Lモード切換線)を横切ると、高速モードから低速モードへ移行する制御指令を出す。
【0035】
前記油圧制御系は、オイルポンプ9と、オイルポンプ9から吐出圧に基づき様々な油圧を作り出すコントロールバルブユニット10により構成されている。コントロールバルブユニット10は、レギュレータ弁や変速制御弁や変速指令弁や減圧弁やロックアップコントロール弁等のスプール弁と共に、ライン圧ソレノイドやセカンダリ圧ソレノイドやステップモータやモード切り換えソレノイド等のアクチュエータを備えている。
【0036】
前記コントロールバルブユニット10は、トルクコンバータ1のロックアップ油圧制御を行う。すなわち、CVTコントローラ56からの非ロックアップ制御指令時、トルクコンバータ1のコンバータ油室17とロックアップ室18にコンバータ圧を導く。CVTコントローラ56からのロックアップ制御指令時、ロックアップ室18からのみコンバータ圧をドレーンする。
【0037】
前記コントロールバルブユニット10は、ベルト式無段変速機構3の変速比油圧制御を行う。すなわち、CVTコントローラ56からの変速比制御指令に応じ、プライマリ圧室34へプライマリ圧を導き、セカンダリ圧室35へセカンダリ圧を導き、ベルト式無段変速機構3により目標変速比を得る。
【0038】
前記コントロールバルブユニット10は、副変速機構4の変速油圧制御を行う。すなわち、CVTコントローラ56からの低速モード維持指令時には、副変速機構4のローブレーキL/Bに対しローブレーキ圧を導く。CVTコントローラ56からの高速モード維持指令時には、副変速機構4のハイクラッチH/Cに対しハイクラッチ圧を導く。CVTコントローラ56からの後退モード維持指令時には、副変速機構4のリバースブレーキR/Bに対しリバースブレーキ圧を導く。また、低速モード選択時にCVTコントローラ56から高速モードへの変速指令が出されると、ローブレーキL/Bのローブレーキ圧を抜きながら、ハイクラッチH/Cへハイクラッチ圧を供給する架け替え変速を行う。高速モード選択時にCVTコントローラ56から低速モードへの変速指令が出されると、ベルト式無段変速機構3の変速比をロー側(低速側)に変速するとともに、ハイクラッチH/Cのハイクラッチ圧を抜きながら、ローブレーキL/Bへローブレーキ圧を供給する架け替え変速を行う。
【0039】
[減速時制御構成]
図5は、実施例1の統合コントローラ59にて実行される減速時制御処理の流れを示す(減速時制御手段)。以下、減速時制御構成をあらわす図5の各ステップについて説明する。
【0040】
ステップS1では、アクセル開度APOがゼロであるか否かを判断する。YES(APO=0)の場合はステップS2へ進み、NO(APO≠0)の場合はエンドへ進む。
ここで、アクセル開度APOがゼロになると、エンジンコントローラ54からのフューエルカット指令に基づき、エンジンEngへの燃料噴射が停止される。
【0041】
ステップS2では、ステップS1でのAPO=0であるとの判断に続き、ブレーキスイッチからの信号に基づき、ブレーキペダルへの踏み込み操作中(ブレーキON)であるか否かを判断する。YES(ブレーキON)の場合はステップS3へ進み、NO(ブレーキOFF)の場合はエンドへ進む。
ここで、アクセル開度APOがゼロで、かつ、ブレーキONという条件が成立すると、ブレーキペダルへの踏み込み操作量に応じた目標制動力(=要求制動力)を得るように、回生協調制御が開始される。回生協調制御では、回生可能量による回生制動力を与えたとき、目標制動力に対して回生制動力のみでは不足する制動力分を、液圧制動力で補うように制御する。そして、決められた制動力分担に応じて、モータコントローラ57から回生制御指令を出力し、ブレーキコントローラ58から液圧制御指令を出力する。
【0042】
ステップS3では、ステップS2でのブレーキONであるとの判断に続き、副変速機クラッチであり、そのときに締結されているローブレーキL/B又はハイクラッチH/Cを開放し、ステップS4へ進む。
【0043】
ステップS4では、ステップS3での副変速機クラッチOFF、あるいは、ステップS10でのVSP≠0であるとの判断に続き、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧をドレーンし、ステップS5へ進む。
【0044】
ステップS5では、ステップS4でのプライマリ圧ドレーンに続き、副変速機クラッチOFF時にセカンダリプーリ32のセカンダリ圧室35へ油圧を導くために出力した指令と同じ指令を出力し、ステップS6へ進む。すなわち、ステップS4,S5により、ベルト式無段変速機構3をロー側へ変速させる。
【0045】
ステップS6では、ステップS5でのセカンダリ圧維持指令(副変速機クラッチOFF時にセカンダリ圧室35へ油圧を導くために出力した指令と同じ指令)に続き、トルクコンバータ1のコンバータ油室17にロックアップ圧(=コンバータ圧)の最大値を導く指令を出力し、ステップS7へ進む。
【0046】
ステップS7では、ステップS6でのロックアップ圧MAX指令に続き、エンジン回転数は所定回転数以上であるか否かを判断する。YES(エンジン回転数≧所定回転数)の場合はステップS8へ進み、NO(エンジン回転数<所定回転数)の場合はステップS11へ進む。
ここで、「所定回転数」は、エンジンアイドル回転数相当に設定される。
【0047】
ステップS8では、ステップS7でのエンジン回転数≧所定回転数であるとの判断に続き、アクセル開度APOはアクセル足離し状態(=OFF)のままであるか否かを判断する。YES(APO=0)の場合はステップS10へ進み、NO(APO≠0)の場合はステップS9へ進む。
ここで、「APO=0」は、ドライバーによる減速要求の維持をあらわし、「APO≠0」は、ドライバーによる減速要求から再加速要求への変化をあらわす。
【0048】
ステップS9では、ステップS8でのAPO≠0であるとの判断に続き、再加速要求に合わせたチェンジマインド制御に遷移する。
ここで、「チェンジマインド制御」では、開放した副変速機クラッチを締結し、エンジン制御を、フューエルカット制御からアクセル開度APOに応じた燃料噴射による制御に移行する。そして、モータ制御を、回生制御から力行制御に移行し、変速制御を、アクセル開度APO等に応じた目標変速比を得る通常制御に移行する。
【0049】
ステップS10では、ステップS8でのAPO=0であるとの判断に続き、車速VSPはゼロであるか否かを判断する。YES(VSP=0)の場合はエンドへ進み、NO(VSP≠0)の場合はステップS4へ戻る。
【0050】
ステップS11では、ステップS7でのエンジン回転数<所定回転数であるとの判断、あるいは、ステップS17でのVSP≠0であるとの判断に続き、エンジンEngに対する燃料噴射を再開し、エンジンEngの自立運転によりエンジン回転数をアイドル回転数に維持し、ステップS12へ進む。
【0051】
ステップS12では、ステップS11でのエンジンアイドル回転に続き、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧をドレーンし、ステップS13へ進む。
【0052】
ステップS13では、ステップS12でのプライマリ圧ドレーンに続き、セカンダリプーリ32のセカンダリ圧室35に所定値(例えば、最小値)を導く指令(セカンダリ圧MIN指令)を出力し、ステップS14へ進む。
【0053】
ステップS14では、ステップS13でのセカンダリ圧MIN指令に続き、トルクコンバータ1のコンバータ油室17にロックアップ圧(=コンバータ圧)の所定値(例えば、最小値)を導く指令を出力し、ステップS15へ進む。
すなわち、ステップS11,S12,S13,S14により、自立運転によりエンジン回転数をアイドル回転数に維持しつつ、エンジン負荷を低く抑えながら、ベルト式無段変速機構3を最ロー変速比状態に維持する。
【0054】
ステップS15では、ステップS14での所定値によるロックアップ圧指令に続き、アクセル開度APOはアクセル足離し状態(=OFF)のままであるか否かを判断する。YES(APO=0)の場合はステップS17へ進み、NO(APO≠0)の場合はステップS16へ進む。
ここで、「APO=0」は、ドライバーによる減速要求の維持をあらわし、「APO≠0」は、ドライバーによる減速要求から再加速要求への変化をあらわす。
【0055】
ステップS16では、ステップS15でのAPO≠0であるとの判断に続き、再加速要求に合わせたチェンジマインド制御に遷移する。
ここで、「チェンジマインド制御」では、開放した副変速機クラッチを締結し、エンジン制御を、アイドル回転数制御からアクセル開度APOに応じた燃料噴射による制御に移行する。そして、モータ制御を、回生制御から力行制御に移行し、変速制御を、アクセル開度APO等に応じた目標変速比を得る通常制御に移行する。
【0056】
ステップS17では、ステップS15でのAPO=0であるとの判断に続き、車速VSPはゼロであるか否かを判断する。YES(VSP=0)の場合はステップS18へ進み、NO(VSP≠0)の場合はステップS11へ戻る。
【0057】
ステップS18では、ステップS17でのVSP=0であるとの判断に続き、車速VSPの停止に合わせて、エンジン回転を停止し、エンドへ進む。
【0058】
次に、作用を説明する。
まず、「比較例の課題」の説明を行う。続いて、実施例1のハイブリッド車両の制御装置における作用を、「減速要求時におけるエンジン回転数低下速度の遅延作用」、「減速要求時におけるアイドル回転数の維持作用」、「減速時制御作用」に分けて説明する。
【0059】
[比較例の課題]
駆動系上流側から順に、エンジン、ベルト式無段変速機、クラッチ、モータ・ジェネレータ、駆動輪を配置した構成を持つハイブリッド車両とする。このハイブリッド車両において、アクセル足離し操作後にブレーキ操作を行って減速走行する際、クラッチを開放するとともに、エンジンを停止するが、ベルト式無段変速機の制御は行わない内容の減速時制御を行うものを比較例とする。
【0060】
この比較例の場合、図6のタイムチャートに示すように、時刻t1'にてアクセルオン状態からアクセルオフ状態にし、時刻t2'にてブレーキオフ状態からブレーキオン状態にする。このとき、時刻t1'にてアクセルオフ操作に伴いエンジンへの燃料噴射が停止され、時刻t2'にてクラッチの開放が開始される。この場合、エンジン回転数が時刻t1'から低下を開始し、時刻t2'からはエンジン回転数が急に低下し、時刻t2'の直後の時点でエンジン回転数がゼロであるエンジン停止状態となる。そして、時刻t3'にて車両が停止(車速=0)する。
【0061】
なお、時刻t2'以降のベルト式無段変速機は、制御としてノーコントロール状態であるため、プーリ比は、図6の点線特性に示すように不定となる。つまり、ベルト式無段変速機がエンジンからも駆動輪からも切り離された状態であり、かつ、エンジン停止に伴いポンプ油圧の発生が無く、プライマリ圧やセカンダリ圧が供給されない状態である。
【0062】
このエンジン停止状態でドライバーがアクセル再踏み込み操作を行うと、まず、停止しているエンジンを、スタータモータを使って再始動する必要があり、エンジンが再始動するまでに長い時間を要する。そして、エンジン再始動後、ポンプ油圧が定常状態となるのを待って、徐々にクラッチ締結を行う。このため、ドライバーが要求する駆動力で車両が走行できるようになるまでに長い時間を要する。
すなわち、比較例の減速時制御では、減速要求から再加速要求へ移行した場合、エンジン再始動や駆動輪へエンジン駆動力を伝達するまでに時間を要し、再踏み込み時の加速応答性が低い、という課題がある。
【0063】
上記課題に対し、モータ・ジェネレータの出力パワーを高いものとしておき、再踏み込み時の加速応答性を、モータ・ジェネレータの出力パワーにより達成することが考えられる。しかし、この場合、大出力パワーを持つ大型のモータ・ジェネレータを、ハイブリッド駆動系に配置する必要があるため、例えば、既存のエンジン車のエンジンルームの設計仕様のままでは、大型のモータ・ジェネレータを配置できないというように、モータレイアウトに課題がある。
【0064】
さらに、液圧制動系にエンジン負圧を利用する負圧ブースタを用いたシステムの場合には、エンジンが停止した後、ペダル踏力が急に増大するといように、ブレーキ操作違和感をドライバーに与えるという課題がある。
【0065】
[減速要求時におけるエンジン回転数低下速度の遅延作用]
上記比較例の課題を解決するには、減速時制御において、エンジン回転数の低下をできる限り抑制することが必要である。以下、これを反映する減速要求時におけるエンジン回転数低下速度の遅延作用を説明する。
【0066】
アクセル開度APOがゼロで、かつ、ブレーキONであると、図5のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS6へと進む。ステップS3にて、そのとき締結されている副変速機クラッチが開放される。これによって、副変速機クラッチを挟んで上流側(エンジンEng及びベルト式無段変速機構3側)と下流側(モータ・ジェネレータM/G及び駆動タイヤTL,TR側)が切り離される。次のステップS4にて、プライマリ圧がドレーンされ、次のステップS5にてセカンダリ圧の維持指令が出力される。これによって、ベルト式無段変速機構3の変速比が最ローとなるように変速される。次のステップS5にて、ロックアップ圧の最大値指令が出力される。これによって、エンジンEngとベルト式無段変速機構3との間で動力を伝達する連結が確保される。
【0067】
このように、副変速機クラッチを挟んで駆動タイヤTL,TR側から切り離されたベルト式無段変速機構3の変速比を最ロー側へ変速することで、ベルト式無段変速機構3のプライマリプーリ31の回転数がセカンダリプーリ32の回転数に対し相対的に高くなる。これにより、ベルト式無段変速機構3のプーリ回転による回転イナーシャが、プライマリプーリ31にロックアップクラッチ11を介して連結されたエンジンEngに伝わり、エンジン回転数の低下を遅らせる。そして、再加速要求や車両停止がない限り、緩やかな勾配にて低下しているエンジン回転数がアイドル回転数相当より低くなるまでは、図5のフローチャートにおいて、ステップS4→ステップS5→ステップS6→ステップS7→ステップS8→ステップS10へと進む流れが繰り返される。
【0068】
この車両減速の途中でドライバーが再加速要求にしたがってアクセル再踏み込み操作を行うと、図5のフローチャートにおいて、ステップS8からステップS9へと進む。しかし、アクセル再踏み込み操作時にエンジンEngの回転数は、アイドル回転数相当以上であるため、エンジンEngを再始動させる必要がなく、チェンジマインド制御に遷移すると、直ちにドライバーの要求駆動力で車両走行に移行する。ちなみに、チェンジマインド制御に遷移すると、開放した副変速機クラッチが締結され、エンジン制御が、フューエルカット制御からアクセル開度APOに応じた燃料噴射による制御に移行し、モータ制御が、回生制御から力行制御に移行する。そして、変速制御が、最ロー変速比(最ロー変速比へ変速中であれば、その時点の変速比)からアクセル開度APO等に応じた目標変速比に変化する通常制御に移行する。
【0069】
上記のように、エンジンEngへの燃料噴射を停止する減速要求時、副変速機クラッチを開放した後、ベルト式無段変速機構3の変速比を最ロー側へ変速する減速時制御を行う構成を採用した。
したがって、減速要求中、エンジン回転数の低下を遅らせることで、再加速要求への移行に備えることができ、エンジンEngを用いた駆動力により再加速要求に応答良く応えられる。同時に、比較例のモータレイアウトの課題も解決され、エンジンEngの出力をアシストする小型のモータ・ジェネレータM/Gを採用できる。さらに、負圧ブースタ42を用いたシステムにおいて、ブレーキ操作違和感の課題も解決される。
【0070】
実施例1では、減速時制御において、エンジンEngへの燃料噴射を停止する減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行う構成を採用した。
この構成により、ベルト式無段変速機構3とモータ・ジェネレータM/Gが、副変速機クラッチの開放により切り離されることで、副変速機クラッチより上流側のエンジンEngやベルト式無段変速機構3が駆動タイヤTL,TRに連れ回されることはない。そして、図2に示すように、駆動タイヤTL,TRとモータ・ジェネレータM/Gが直結されることで、駆動タイヤTL,TRからの回転エネルギーが、モータ・ジェネレータM/Gにて効率良く電気エネルギーに変換される。
したがって、減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行うことで、高い回生効率で60Vバッテリ27への充電容量が確保される。
【0071】
実施例1では、減速時制御において、ベルト式無段変速機構3のプライマリプーリ31に供給されている作動油をドレーンし、セカンダリプーリ32のセカンダリ圧の維持指令を出力することで、ベルト式無段変速機構3の変速比を最ロー側へ変速する構成を採用した。
したがって、変速のための差推力を確保して変速を維持できる。
【0072】
[減速要求時におけるアイドル回転数の維持作用]
上記燃料噴射を停止しての減速時制御では、エンジン回転速度を遅くすることはできても長時間の経過によりいずれはエンジン停止に至る。そこで、エンジン回転数が所定値未満に低下してきたら自立運転によりエンジン回転数を維持することが必要である。以下、これを反映する減速要求時におけるアイドル回転数の維持作用を説明する。
【0073】
減速時制御中にエンジン回転数が所定値未満まで低下すると、図5のフローチャートにおいて、ステップS7からステップS11→ステップS12→ステップS13→ステップS14へと進む。ステップS11では、エンジンEngに対する燃料噴射が再開され、エンジンEngの自立運転によりエンジン回転数がアイドル回転数に維持される。次のステップS12では、プライマリプーリ31のプライマリ圧室34に導かれているプライマリ圧がドレーンされ、次のステップS13では、セカンダリプーリ32のセカンダリ圧室35に最小値を導く指令が出力される。これにより、油圧負担を少なくして最ローの変速比が維持される。次のステップS14では、トルクコンバータ1のコンバータ油室17にロックアップ圧最小値を導く指令が出力される。これにより、エンジン負荷を低下させつつ、エンジンEngとの連結が維持される。
【0074】
このように、減速時制御中にエンジン回転数が所定値未満まで低下すると、油圧負担やエンジン負荷を抑えながら、自立運転によりエンジン回転数がアイドル回転数に維持される。そして、再加速要求や車両停止がない限り、エンジン回転数をアイドル回転数相当に維持しながら、図5のフローチャートにおいて、ステップS11→ステップS12→ステップS13→ステップS14→ステップS15→ステップS17へと進む流れが繰り返される。
【0075】
この車両減速の途中でドライバーが再加速要求にしたがってアクセル再踏み込み操作を行うと、図5のフローチャートにおいて、ステップS15からステップS16へと進む。しかし、アクセル再踏み込み操作時にエンジンEngの回転数は、アイドル回転数相当に維持されているため、エンジンEngを再始動させる必要がなく、チェンジマインド制御に遷移すると、直ちにドライバーの要求駆動力で車両走行に移行する。ちなみに、チェンジマインド制御に遷移すると、開放した副変速機クラッチが締結され、エンジン制御が、アイドル回転数制御からアクセル開度APOに応じた燃料噴射による制御に移行し、モータ制御が、回生制御から力行制御に移行する。そして、変速制御が、最ロー変速比(最ロー変速比へ変速中であれば、その時点の変速比)からアクセル開度APO等に応じた目標変速比に変化する通常制御に移行する。
【0076】
上記のように、実施例1では、減速時制御において、減速時制御開始後、エンジンEngの回転数がアイドル回転数相当まで低下すると、エンジンEngへの燃料噴射を再開し、自立運転によりエンジンEngの回転数をアイドル回転数相当に維持する構成を採用した。
したがって、減速時制御開始から長い時間が経過しても、エンジン回転数がアイドル回転数相当に維持されることで、減速要求から再加速要求への移行に備えることができ、エンジンEngを用いた駆動力により再加速要求に応答良く応えられる。
【0077】
[減速時制御作用]
図7のタイムチャートに基づき、アクセルオフ操作から車両停止までの減速時制御作用を説明する。
【0078】
実施例1の場合、図7のタイムチャートに示すように、時刻t1にてアクセルオン状態からアクセルオフ状態にし、時刻t2にてブレーキオフ状態からブレーキオン状態にする。このとき、時刻t1にてアクセルオフ操作に伴いエンジンへの燃料噴射が停止され、時刻t2にてクラッチの開放が開始されると共に、プーリ比を最ローとする変速制御が行われる。この変速制御では、プライマリ圧のドレーンにより時刻t2から圧力が急に低下し、セカンダリ圧やロックアップ圧は、エンジン回転数の低下にしたがったものとなる。
【0079】
したがって、時刻t1からエンジン回転数の低下を開始するが、時刻t2以降においてもエンジン回転数の低下勾配(低下速度)が、エンジンEng単独で回転している場合に比べ、緩やかとなり、時刻t2から時間間隔Δtaを経過した時刻t3の時点でエンジン回転数がアイドル回転数相当に到達する。そして、時刻t3から車両が停止する時刻t4までの時間間隔Δtbは、エンジン回転数がアイドル回転相当のままで維持される。
【0080】
すなわち、時刻t2から時刻t3までの時間間隔Δtaが、ベルト式無段変速機構3を最ロー側へ変速することによるエンジン回転低下速度の遅延効果をあらわす。また、時刻t3から時刻t4までの時間間隔Δtbが、エンジンEngの自立運転によるアイドル回転相当維持効果をあらわす。言い換えると、時刻t2から時刻t4までの間であれば、どのタイミングで再加速要求が介入してきても、応答良く再加速要求に応えることができる。
【0081】
次に、効果を説明する。
実施例1のハイブリッド車両の制御装置にあっては、下記に列挙する効果を得ることができる。
【0082】
(1) エンジンEngと、
エンジンEngに連結され、ロー側とハイ側の変速比を有する変速機(ベルト式無段変速機構3)と、
前記変速機(ベルト式無段変速機構3)の下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチ(ローブレーキL/B又はハイクラッチH/C)と、
前記クラッチ(ローブレーキL/B又はハイクラッチH/C)の下流側の位置に配置され、駆動・回生に用いられるモータ・ジェネレータM/Gと、
前記モータ・ジェネレータM/Gの下流側に連結される駆動輪(駆動タイヤLT,RT)と、
前記エンジンEngへの燃料噴射を停止する減速要求時、前記クラッチ(ローブレーキL/B又はハイクラッチH/C)を開放した後、前記変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する減速時制御手段(図5)と、
を備える。
このため、減速要求中、エンジン回転数の低下を遅らせることで再加速要求への移行に備えることができる。
【0083】
(2) 前記減速時制御手段(図5)は、前記エンジンEngへの燃料噴射を停止する減速要求時、回生要求に応じて前記モータ・ジェネレータM/Gによる回生を行う。
このため、(1)の効果に加え、減速要求時、回生要求に応じてモータ・ジェネレータM/Gによる回生を行うことで、高い回生効率でバッテリ(60Vバッテリ27)への充電容量を確保することができる。
【0084】
(3) 前記変速機は、無段変速機(ベルト式無段変速機構3)であって、
前記減速時制御手段(図5)は、前記無段変速機(ベルト式無段変速機構3)のプライマリプーリ31に供給されている作動油をドレーンし、セカンダリプーリのセカンダリ圧の維持指令を出力することで、前記無段変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する(ステップS4,S5)。
このため、(1)又は(2)の効果に加え、無段変速機(ベルト式無段変速機構3)の変速比をロー側へ変速する際、変速の差推力を確保して変速を維持することができる。
【0085】
(4) 前記減速時制御手段(図5)は、減速時制御開始後、前記エンジンEngの回転数がアイドル回転数相当まで低下すると、前記エンジンEngへの燃料噴射を再開し、自立運転により前記エンジンEngの回転数をアイドル回転数相当に維持する(ステップS11,S12,S13,S14)。
このため、(1)〜(3)の効果に加え、減速時制御開始からエンジン回転数がアイドル回転数相当まで低下するまでの時間経過があっても、減速要求から再加速要求への移行に備えることができる。
【0086】
(5) 前記無段変速機は、無段階の変速比により変速するベルト式無段変速機構3と、該ベルト式無段変速機構3の下流位置に配置され、複数の変速モードを切り換える副変速機構4と、を有する副変速機付き無段変速機CVTであり、
前記クラッチとして、前記副変速機構4の変速モードを切り換える摩擦締結要素(ローブレーキL/B、ハイクラッチH/C)のうち、減速要求時に締結されている摩擦締結要素を用いる(図2)。
このため、(1)〜(4)の効果に加え、副変速機付き無段変速機CVTに既存の摩擦締結要素(ローブレーキL/B、ハイクラッチH/C)を利用し、無段変速機(ベルト式無段変速機構3)とモータ・ジェネレータM/Gの間を切り離すことができる。
【0087】
以上、本発明のハイブリッド車両の制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0088】
実施例1では、変速機として、副変速機付き無段変速機CVTに有するベルト式無段変速機構3を用いる例を示した。しかし、変速機としては、ベルト式無段変速機構のみによるものを用い、クラッチを新たに付加するような例としても良い。また、無段変速機に代えて、有段式の変速機を用いるような例であっても良い。
【0089】
実施例1では、ハイブリッド駆動系として、副変速機付き無段変速機CVTを搭載したエンジン車の駆動系に対して、モータ&減速ギアユニットSEDを追加することで構成した例を示した。しかし、ハイブリッド駆動系として、駆動系上流側から順に、エンジン、変速機、クラッチ、モータ・ジェネレータ、駆動輪を配置した構成を持つものであれば、本発明のハイブリッド車両の制御装置を適用することができる。さらに、ハイブリッド駆動系として、駆動系上流側から順に、エンジン、変速機、クラッチ、駆動輪を配置し、且つ、クラッチの下流側にモータ・ジェネレータを配置し、且つ、モータ・ジェネレータを、変速機を介さずに駆動輪に連結したものであれば、本発明のハイブリッド車両の制御装置を適用することができる。
【符号の説明】
【0090】
Eng エンジン
CVT 副変速機付き無段変速機
M/G モータ・ジェネレータ
DSL 左ドライブシャフト
DSR 右ドライブシャフト
TL 左駆動タイヤ(駆動輪)
TR 右駆動タイヤ(駆動輪)
1 トルクコンバータ
2 カウンターギア機構
3 ベルト式無段変速機構(変速機)
31 プライマリプーリ
32 セカンダリプーリ
33 ベルト
4 副変速機構
L/B ローブレーキ(クラッチ、摩擦締結要素)
H/C ハイクラッチ(クラッチ、摩擦締結要素)
5 終減速ギア機構
6 差動機構
54 エンジンコントローラ
55 バッテリコントローラ
56 CVTコントローラ
57 モータコントローラ
58 ブレーキコントローラ
59 統合コントローラ
【特許請求の範囲】
【請求項1】
エンジンと、
前記エンジンに連結され、ロー側とハイ側の変速比を有し変速する変速機と、
前記変速機の下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチと、
前記クラッチの下流側の位置に配置され、駆動・回生に用いられるモータ・ジェネレータと、
前記モータ・ジェネレータの下流側に連結される駆動輪と、
前記エンジンへの燃料噴射を停止する減速要求時、前記クラッチを開放した後、前記変速機の変速比をロー側へ変速する減速時制御手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記減速時制御手段は、前記エンジンへの燃料噴射を停止する減速要求時、回生要求に応じて前記モータ・ジェネレータによる回生を行う
ことを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項1又は2に記載されたハイブリッド車両の制御装置において、
前記変速機は、無段変速機であって、
前記減速時制御手段は、前記無段変速機のプライマリプーリに供給されている作動油をドレーンすることで、前記無段変速機の変速比をロー側へ変速する
ことを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項1から請求項3までの何れか1項に記載されたハイブリッド車両の制御装置において、
前記減速時制御手段は、減速時制御開始後、前記エンジンの回転数がアイドル回転数相当まで低下すると、前記エンジンへの燃料噴射を再開し、自立運転により前記エンジンの回転数をアイドル回転数相当に維持する
ことを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1から請求項4までの何れか1項に記載されたハイブリッド車両の制御装置において、
前記変速機は、無段階の変速比により変速するベルト式無段変速機構と、該ベルト式無段変速機構の下流位置に配置され、複数の変速モードを切り換える副変速機構と、を有する副変速機付き無段変速機であり、
前記クラッチとして、前記副変速機構の変速モードを切り換える摩擦締結要素のうち、減速要求時に締結されている摩擦締結要素を用いる
ことを特徴とするハイブリッド車両の制御装置。
【請求項1】
エンジンと、
前記エンジンに連結され、ロー側とハイ側の変速比を有し変速する変速機と、
前記変速機の下流側の位置に配置され、開放することにより動力伝達を遮断するクラッチと、
前記クラッチの下流側の位置に配置され、駆動・回生に用いられるモータ・ジェネレータと、
前記モータ・ジェネレータの下流側に連結される駆動輪と、
前記エンジンへの燃料噴射を停止する減速要求時、前記クラッチを開放した後、前記変速機の変速比をロー側へ変速する減速時制御手段と、
を備えることを特徴とするハイブリッド車両の制御装置。
【請求項2】
請求項1に記載されたハイブリッド車両の制御装置において、
前記減速時制御手段は、前記エンジンへの燃料噴射を停止する減速要求時、回生要求に応じて前記モータ・ジェネレータによる回生を行う
ことを特徴とするハイブリッド車両の制御装置。
【請求項3】
請求項1又は2に記載されたハイブリッド車両の制御装置において、
前記変速機は、無段変速機であって、
前記減速時制御手段は、前記無段変速機のプライマリプーリに供給されている作動油をドレーンすることで、前記無段変速機の変速比をロー側へ変速する
ことを特徴とするハイブリッド車両の制御装置。
【請求項4】
請求項1から請求項3までの何れか1項に記載されたハイブリッド車両の制御装置において、
前記減速時制御手段は、減速時制御開始後、前記エンジンの回転数がアイドル回転数相当まで低下すると、前記エンジンへの燃料噴射を再開し、自立運転により前記エンジンの回転数をアイドル回転数相当に維持する
ことを特徴とするハイブリッド車両の制御装置。
【請求項5】
請求項1から請求項4までの何れか1項に記載されたハイブリッド車両の制御装置において、
前記変速機は、無段階の変速比により変速するベルト式無段変速機構と、該ベルト式無段変速機構の下流位置に配置され、複数の変速モードを切り換える副変速機構と、を有する副変速機付き無段変速機であり、
前記クラッチとして、前記副変速機構の変速モードを切り換える摩擦締結要素のうち、減速要求時に締結されている摩擦締結要素を用いる
ことを特徴とするハイブリッド車両の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−86649(P2013−86649A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228707(P2011−228707)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000231350)ジヤトコ株式会社 (899)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000231350)ジヤトコ株式会社 (899)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]