
ハイブリッド車両の変速制御装置
【課題】各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出し学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供する。
【解決手段】対応関係補正手段は、エンジン回転数Neと自動変速装置の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する回転差判定手段と、変速時に変速作動が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であることを条件とし、クラッチアクチュエータ作動量とクラッチトルクとの対応関係において、クラッチ制御手段によってクラッチアクチュエータに作動された目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルク演算手段によって演算された推定クラッチトルクTesに置き換えるクラッチトルク−作動量補正手段と、を有する。
【解決手段】対応関係補正手段は、エンジン回転数Neと自動変速装置の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する回転差判定手段と、変速時に変速作動が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であることを条件とし、クラッチアクチュエータ作動量とクラッチトルクとの対応関係において、クラッチ制御手段によってクラッチアクチュエータに作動された目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルク演算手段によって演算された推定クラッチトルクTesに置き換えるクラッチトルク−作動量補正手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関とモータジェネレータ(バッテリに蓄えられた電力から駆動輪に伝達する駆動力を発生し、回生時には駆動輪によって駆動されて電力を回生する)、及び自動化されたクラッチ装置を備え、クラッチ係合時のクラッチアクチュエータの作動量を学習することによって好適にクラッチトルクを制御するハイブリッド車両の変速制御装置に関する。
【背景技術】
【0002】
従来、内燃機関(エンジン)を駆動源とする車両において、既存のマニュアルトランスミッションに各アクチュエータを取り付け、運転者の意思、若しくは車両状態により一連の変速操作(クラッチの断接、ギヤシフト、及びセレクト)を自動的に行なう自動変速機(以下、AMT(オートメイテッドマニュアルトランスミッション)という)が知られている。該AMTは、例えば、クラッチの制御においては、車両特性から要求されるクラッチトルクをクラッチアクチュエータの作動量であるクラッチアクチュエータ作動量に変換して制御している。出荷時において上記クラッチトルクとクラッチアクチュエータ作動量との関係は、クラッチディスクのクッショニング特性などから静的に求められるものであるが、実車では、クラッチフェーシングの摩耗、発熱によるμ(摩擦係数)変化、経年劣化等、動的な変動要因が大きく作用することが知られている。
【0003】
このように、クラッチトルクとクラッチアクチュエータ作動量との関係が変化してくると、AMTの場合、変速時のクラッチ切断操作と係合操作とが意図したタイミングどおりに行なわれなくなり、例えばクラッチ切断時間が意図した時間を越えて長くなると、クラッチ切断中にはエンジンからのトルクが車輪に伝達されず運転者が失速感を感じる虞れがある。また、クラッチ切断時間が長くなると、負荷を受けないエンジンが過大に吹き上がりクラッチ係合動作時にエンジンの回転数と変速機の入力軸回転数の差が大きくなって過大な変速ショックが発生する虞もある。そこで、クラッチトルクとクラッチアクチュエータ作動量との関係を適宜学習し、その関係を定めるクラッチトルクマップを補正していく技術が提案されている(例えば、特許文献1)。特許文献1に示す技術では、クラッチ係脱操作を行なう発進時に学習を行っている。発進時には変速機の入力軸回転数は略0となっており、これによって常時安定したクラッチトルクとクラッチアクチュエータ作動量の関係が取得できる。そして該取得したデータによってクラッチトルクとクラッチアクチュエータ作動量との関係を補正し、クラッチ切断時間が好適なものとなるようにして、失速感の発生や、エンジンの過大な吹き上がりによる変速ショックの発生等を抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−214331号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1に開示された従来の技術を、内燃機関とモータジェネレータ、とを備えたハイブリッド車両であって、発進時にはモータジェネレータのみによって発進するモードを有する例えばパラレルハイブリッド車両等に適用しようとした場合、発進時においては、クラッチ装置の係合操作が不要であるので、クラッチアクチュエータ作動量を学習することができない。また発進時以外の例えば通常の変速時においてクラッチアクチュエータ作動量を学習しようとすると、クラッチアクチュエータ作動量を学習する要件となる、いわゆる半クラッチ状態の時間が短かいので学習には適さないとされていた。これらより学習の機会が大幅に減少しクラッチトルクとクラッチアクチュエータ作動量の補正精度が悪化する虞があった。
【0006】
そして、一般的にハイブリッド車両の場合、エンジン走行における変速時のクラッチ切断時には、モータジェネレータによって駆動力をアシストし、失速感等が出ないように制御される。しかし、上述したクラッチトルクとクラッチアクチュエータ作動量の補正精度の悪化によってクラッチ切断時間が意図した時間を越えて長くなると、クラッチ切断とモータジェネレータによるアシストとのタイミングが合わず、これによって失速感が発生したり、エンジンの過大な吹き上がりによる変速ショックが発生したりする虞れがある。
【0007】
本発明は上記課題に鑑みてなされたものであり、各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出して学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係るハイブリッド車両の変速制御装置は、車両に搭載されたエンジンが出力するエンジントルクによって回転されるよう適合された入力軸の回転を前記エンジンのエンジン回転数が複数段の変速比毎に準備された各変速線を越えたときに一の変速比から他の変速比に変速して前記車両の駆動輪に回転連結された出力軸に伝達する自動変速装置と、クラッチアクチュエータの作動によって前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱するとともに、係合状態において前記アウトプットシャフトから前記入力軸に伝達されるクラッチトルクを目標クラッチトルクに制御するクラッチと、前記クラッチのクラッチトルクを制御する前記クラッチアクチュエータのクラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を記憶するクラッチトルク−作動量記憶手段と、所要の目標クラッチトルクに対応する前記クラッチアクチュエータのクラッチアクチュエータ作動量を前記クラッチトルク−作動量記憶手段から求め前記クラッチアクチュエータを前記クラッチアクチュエータ作動量作動させて前記クラッチトルクを前記目標クラッチトルクに制御するクラッチ制御手段と、前記エンジンのエンジン回転数を検出するエンジン回転数検出手段と、前記エンジンの出力を制御するエンジン出力制御手段の作動量を検出するエンジン出力制御作動量検出手段と、前記エンジン出力制御手段の各作動量における前記エンジンの回転数と前記エンジントルクとの関係に基づいて前記エンジン出力制御作動量検出手段が検出したエンジン出力制御作動量と前記エンジン回転数検出手段が検出したエンジン回転数とから前記エンジントルクを演算するエンジントルク検出手段と、前記クラッチ制御手段が前記クラッチアクチュエータを前記目標クラッチトルクに対応するクラッチアクチュエータ作動量作動させたとき、前記エンジントルク検出手段が前記エンジン出力制御作動量と前記エンジン回転数とから演算したエンジントルクから前記エンジン回転数の加速度に前記エンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクを演算する推定クラッチトルク演算手段と、前記クラッチアクチュエータを作動させたとき、前記推定クラッチトルク演算手段によって演算された推定クラッチトルクと前記クラッチアクチュエータ作動量との関係を学習し、前記クラッチトルク−作動量記憶手段に記憶された前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を補正する対応関係補正手段と、前記自動変速装置の前記入力軸の入力軸回転数を検出する入力軸回転数検出手段と、前記自動変速装置の入力軸又は出力軸に回転連結されたモータと、を備え、前記対応関係補正手段は、前記自動変速装置の変速時に、前記自動変速装置の変速作動が完了したことを検出する変速作動完了検出手段と、前記変速作動完了検出手段によって変速作動の完了が検出された後に、前記クラッチが前記係合状態において、前記エンジン回転数と前記自動変速装置の前記入力軸回転数との差の絶対値が所定値以上であることを判定する回転差判定手段と、前記変速時に前記変速作動が完了し、且つ前記差の絶対値が前記所定値以上であることを条件とし、前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係において、前記クラッチ制御手段によって前記クラッチアクチュエータに作動された前記目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクに置き換えるクラッチトルク−作動量補正手段と、を有する。
【0009】
上記課題を解決するため、請求項2に係るハイブリッド車両の変速制御装置は、請求項1において、前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクを、前記エンジン回転数および前記入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有する。
【0010】
上記課題を解決するため、請求項3に係るハイブリッド車両の変速制御装置は、請求項1または2において、前記差の絶対値の変化割合が所定値以下であることを検出する回転差変化量検出手段を有する。
【0011】
上記課題を解決するため、請求項4に係るハイブリッド車両の変速制御装置は、請求項1乃至3のいずれか1項において、前記クラッチは前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱可能に連結し、前記モータは、前記自動変速装置の出力軸に回転連結されるとともに前記駆動輪にモータ減速比で回転連結されている。
【発明の効果】
【0012】
請求項1に係る発明によれば、学習条件として自動変速装置が変速時となり、変速作動の完了が変速作動完了検出手段によって検出されるとともに、クラッチが切断状態から完全に接続される状態に向かって徐々に繋がっていく係合状態において、エンジン回転数と自動変速装置の入力軸回転数との差の絶対値が所定値以上であることが回転差判定手段によって判定されると、エンジントルク検出手段によってそのときのエンジン出力制御作動量とエンジン回転数とからエンジントルクが求められる。そして推定クラッチトルク演算手段が、クラッチトルクがクラッチ制御手段によって目標クラッチトルクに制御されたときに実際に出力したクラッチトルクの推定値である推定クラッチトルクを前記求めたエンジントルクから演算する。その後、クラッチトルク−作動量補正手段が、クラッチトルク−作動量記憶手段に記憶されたクラッチアクチュエータ作動量とクラッチトルクとの対応関係において目標クラッチトルクに制御したクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルクに置き換えて補正する。
【0013】
このように変速中に変速作動が完了しクラッチが係合状態となっている場合において、エンジン回転数と入力軸回転数との差の絶対値が所定値以上に大きい場合には、エンジントルクがクラッチに作用した状態で、そのときの推定クラッチトルクに基づいて補正後のクラッチトルクとするための学習を充分行なうことができる。
【0014】
請求項2に係る発明によれば、請求項1において、推定クラッチトルク演算手段によって演算された推定クラッチトルクを、エンジン回転数および入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有している。エンジン回転数による補正については、エンジン回転数に比例しクラッチの押し付け荷重によって押し付け部分に発生するクラッチトルクを変動させる遠心力分を補正するものである。また入力軸回転数による補正については、入力軸回転数に比例し入力軸自体の回転によって発生するクラッチトルクを変動させる変動分を補正するものである。これによって推定クラッチトルクの演算精度はさらに向上し、補正精度が向上する。
【0015】
請求項3に係る発明によれば、請求項1または2において、回転差変化量検出手段が差の絶対値の変化割合が所定値以下であることを検出することによって、エンジントルクがクラッチに作用した係合状態において徐々に差の絶対値が減少していくことを検出できる。このように変化割合が所定値以下であるとき、すなわち徐々に検出した差の絶対値が減少していく場合に学習を行なうようにするので、発進時に学習を行なう場合と同様に安定して学習でき精度のよいデータを取得できる。
【0016】
請求項4に係る発明によれば、請求項1乃至3のいずれか1項において、クラッチはエンジンのアウトプットシャフトと自動変速装置の入力軸とを係脱可能に連結し、モータは、自動変速装置の出力軸に回転連結されるとともに駆動輪に回転連結されている、いわゆるパラレル方式のハイブリッド車両である。このように構成されるハイブリッド車両ではモータジェネレータのみの駆動力によって発進することもできるので、そのときには発進時におけるクラッチアクチュエータ作動量の学習の機会が少なくなる。しかし、本発明では所定の条件における変速時において、クラッチアクチュエータ作動量の学習の機会を増やすことができるのでクラッチトルク−作動量記憶手段に記憶されたクラッチアクチュエータ作動量とクラッチトルクとの対応関係を適宜補正しながら安定した変速制御を実施することができる。
【図面の簡単な説明】
【0017】
【図1】本発明に係る変速制御装置を含むハイブリッド車両の概略構成図である。
【図2】図1のエンジン、自動変速機、及びクラッチ装置の概略構成図である。
【図3】クラッチトルクとクラッチアクチュエータ作動量との関係を示すクラッチトルクマップである。
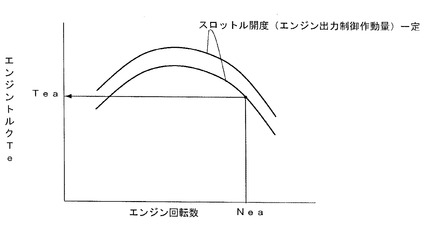
【図4】エンジン出力制御作動量一定時におけるエンジントルク−エンジン回転数グラフである。
【図5】変速線の一例である。
【図6】本実施形態に係る推定トルク学習時におけるエンジン回転数Neと入力軸回転数Ni等の制御状態を示すタイムチャート図である。
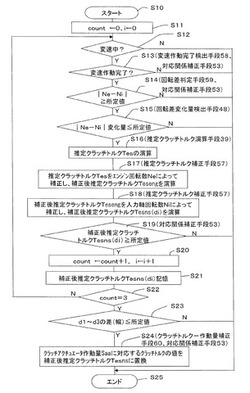
【図7】本実施形態に係るフローチャートである。
【図8】別の実施例(減速時)に係る推定トルクの学習状態におけるエンジン回転数Neと入力軸回転数Ni等の制御状態を示すタイムチャート図である。
【発明を実施するための形態】
【0018】
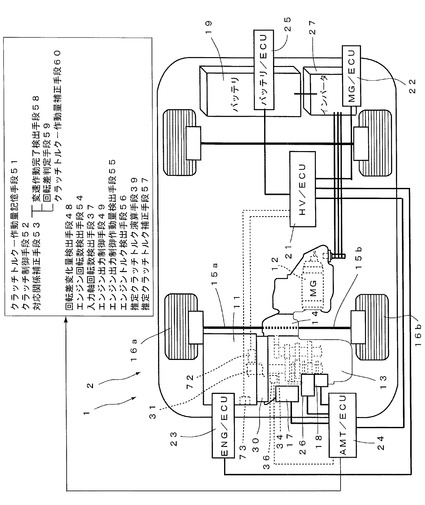
次に、本発明を実施するための形態について図面を参照して詳細に説明する。図1は、本発明を適用可能なハイブリッド車両の構成を示したブロック図である。図1に示すハイブリッド車両1は、エンジン11と、バッテリ19に蓄積された電気で駆動されるモータジェネレータ(本発明のモータに相当、以下、「MG」と称す)12とを備え、該2種類の原動機が並列に配置されて搭載され、各々の原動機によって車輪を駆動できるような構成となっている。
【0019】
また、ハイブリッド車両1は、図1、図2に示すエンジン11の出力軸31(本発明のアウトプットシャフトに相当)に回転連結され、出力軸31の回転数を複数の変速比の変速段によって変速する自動変速機13(本発明の自動変速装置に相当)と、エンジン11の出力軸31と自動変速機13の入力軸34との係脱を制御するとともに出力軸31から入力軸34に伝達されるクラッチトルクを後述する目標クラッチトルクTrに制御するクラッチ装置30(本発明のクラッチに相当)と、図1に示す差動装置(ディファレンシャル)14と、駆動軸15a、15bと、駆動輪16a、16bと、を備えている。
【0020】
さらに、ハイブリッド車両1は、車両全体の制御を掌るHV/ECU(Hybrid Vehicle Electronic Control Unit)21と、MG12に駆動又は回生を指令するMG/ECU22と、MG12に電力を供給するインバータ27と、エンジン11の停止、及び燃焼を制御するENG/ECU23と、自動変速機13に組み込まれたクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26と接続され、各アクチュエータ17、18、26を制御し最適な変速を行なわせしめるAMT/ECU24と、インバータ27と接続されたバッテリ19の充電状態を管理するバッテリECU25と、を備えている。MG/ECU22、ENG/ECU23、AMT/ECU24、及びバッテリECU25はHV/ECU21とCAN接続され、それぞれはHV/ECU21によって管理、及び制御されている。
【0021】
各ECU21、22、23、24、25は、それぞれ制御部(図略)を備えており、演算を行なうCPU(制御部)と、ROM、RAM及びバックアップ電源なしでデータの保持が可能なEEPROM等とを備えて構成される(いずれも図略)。制御部は、CPUによってROMに記憶された各種制御プログラムやマップに基づいて演算処理を実行する。ROMは、各種制御プログラムや、これらのプログラムを実行する際に参照されるマップ等が記憶されたメモリである。RAMは制御部での演算結果や外部から入力されるデータ等を一時的に記憶するメモリに相当し、EEPROMは記憶されたデータ等を保存する不揮発性のメモリからなる。制御部のCPU、ROM、RAM、及びEEPROMは、夫々バス(図略)を介して互いに接続されるとともに、入力インターフェース、及び出力インターフェース(いずれも図略)と接続される。
【0022】
このように構成された本実施形態に係るハイブリッド車両1は、発進時にMG12のみによって発進し、MG12の駆動力が不足した場合にエンジン11をエンジン11に設けられた点火用のイグニッションスイッチ73によって始動させる。これによってMG12とエンジン11との両駆動力、若しくはエンジン11のみの駆動力によっても走行することができる。
【0023】
エンジン11、自動変速機13、入力軸回転数センサ36(後述する入力軸回転数検出手段37を構成する)、エンジン回転数センサ72(後述するエンジン回転数検出手段54を構成する)、クラッチ装置30、MG12(モータジェネレータ)、HV/ECU21、ENG/ECU23、及びAMT/ECU24等によって本発明に係る変速制御装置2が構成される。
【0024】
またAMT/ECU24が有するクラッチトルク−作動量記憶手段51、クラッチ制御手段52、対応関係補正手段53、エンジン回転数検出手段54、入力軸回転数検出手段37、エンジン出力制御手段49、エンジン出力制御作動量検出手段55、エンジントルク検出手段56、推定クラッチトルク演算手段39、回転差変化量検出手段48、及び推定クラッチトルク補正手段57によって変速制御装置2が制御される。
【0025】
さらに、図1、図2に示すようにHV/ECU21には、イグニッションスイッチ73、エンジン回転数センサ72、及びアクセル開度センサ(図略)等の各種センサが接続されている。AMT/ECU24には、入力軸回転数センサ36、ストロークセンサ67、クラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26等が接続されている。そしてHV/ECU21は、上記各種センサの検出信号を取り込み、車両状態(アクセルのオン・オフ状態、イグニッションスイッチ73のオン・オフ状態、エンジン回転数Ne等)を検知し、AMT/ECU24は、ストロークセンサ67からの信号によってクラッチアクチュエータ17のアクチュエータ作動量Saを検知し、入力軸回転数センサ36からの信号によって入力軸回転数Niを検出する。そして検知した車両状態及び運転者の意思に基づいて、HV/ECU21がAMT/ECU24を制御し、AMT/ECU24がクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26を駆動して自動変速機13の変速段の変速作動を行なう。
【0026】
まず、図3、及び図4に基づき変速制御装置2を構成するエンジン11、自動変速機13、クラッチ装置30、MG12、HV/ECU21、ENG/ECU23、及びAMT/ECU24等について詳細に説明する。ただし、MG12は、ハイブリッド車両で一般的に使用される3相電気モータであるので詳細な説明は省略する。
【0027】
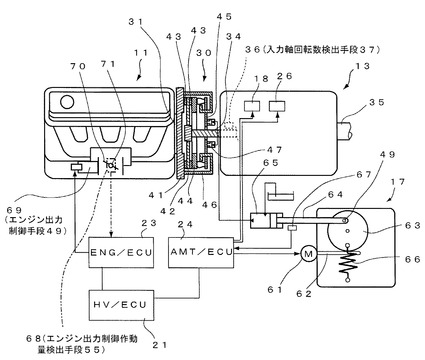
図2に示すように、エンジン11の出力軸31には、クラッチ装置30が組み付けられ、クラッチ装置30を介して出力軸31と自動変速機13の入力軸34とが接続されている。クラッチ装置30は乾式・単板式の摩擦クラッチである。
【0028】
エンジン11は、吸入空気量を調節し、エンジン11の出力を制御するためのエンジン出力制御手段49を構成するスロットルバルブ70と、エンジン出力制御作動量であるスロットルバルブ70の開度(スロットル開度)を検出するためのスロットルセンサ68(本発明のエンジン出力制御作動量検出手段55を構成する)と、スロットルバルブ70を開閉駆動するスロットル用アクチュエータ69(本発明のエンジン出力制御手段49を構成する)とを備えている。スロットルセンサ68、及びスロットル用アクチュエータ69はENG/ECU23に接続されている。そしてHV/ECU21からの指令に基づきENG/ECU23がスロットル用アクチュエータ69を制御し、スロットルセンサ68からのスロットル開度信号がENG/ECU23に送信される。
【0029】
なお、図2においてはスロットル用アクチュエータ69がスロットルバルブ70を開閉させるように表してはいない。しかし、図2は模式的に描いたものであり、実際にはスロットル用アクチュエータ69がスロットルバルブ70の回転軸であるスロットルシャフト71を軸回りに回動させるよう構成されている。
【0030】
図1に示すように、エンジン11の出力軸31近傍には出力軸31の回転数を検出する非接触式のエンジン回転数センサ72が設けられている。また図略のアクセルペダルにはアクセルペダルの踏み込み量を検出するアクセル開度センサが設けられている。そして運転者がアクセルペダル(図略)を踏み込んだり戻したりすると、アクセル開度センサからアクセル開度信号がHV/ECU21に送信され、運転者の走行に対する意思(加減速、または、定常走行等の要求)を伝達する。HV/ECU21はエンジン11が作動状態である場合においては、送信されたアクセル開度信号の値に応じてENG/ECU23に指令値を送信する。ENG/ECU23は、指令値に基づきスロットル用アクチュエータ69を作動させてスロットルバルブ70を開閉弁させ、エンジン回転数センサ72によって出力軸31の回転数を監視しながらエンジン11の出力及び、エンジン回転数Neを制御する。
【0031】
なお、本実施形態においては、エンジン回転数Neは、運転者が踏み込むアクセルペダルの踏み込み量のみによって制御されるものではなく、アクセルペダルの踏み込み量とは関係なく、HV/ECU21を介したAMT/ECU24からの要求によってもスロットル用アクチュエータ69を作動させて制御可能となっている。
【0032】
図2に示すように、クラッチ装置30(本発明のクラッチに相当)は、エンジン11の出力軸31に固定されたフライホイール41、クラッチフェージング43が外周両面に貼付され固着されるとともに、自動変速機13の入力軸34とスプライン連結され一体的に回転するクラッチディスク42、フライホイール41に固定されるクラッチアッセンブリであるプレッシャプレート44、ダイヤフラムスプリング45、クラッチカバー46、及び油圧ダイレクトシリンダ(コンセントリックスレーブシリンダ)47等を含んで構成される。
【0033】
そしてクラッチ装置30は、油圧ダイレクトシリンダ47、ダイヤフラムスプリング45、及びプレッシャプレート44を介し、フライホイール41に対するクラッチディスク42の圧着荷重を変化させる。これによってフライホイール41及びクラッチディスク42間の回転伝達量を増減可能とし、クラッチトルクTcを目標クラッチトルクTrに制御可能としている。
【0034】
クラッチアクチュエータ17は、図2に示すように、直流電動モータ61、減速機62、出力ホイール63、出力ロッド64、マスターシリンダ65、及びアシストスプリング(助勢手段)66等を備えて構成されている。
【0035】
減速機62は、直流電動モータ61の出力軸上に形成されたウォームギヤよりなり、出力ホイール63は減速機62を介して直流電動モ−タ61の駆動によって回動される。そして出力ホイール63の回動によって、出力ホイール63にピポットピン49によって連結された出力ロッド64が前方(図2において左方)又は後方(図2において右方)に移動(ストローク、進退)されてマスターシリンダ65を作動させる。そしてマスターシリンダ65の作動によって発生した油圧を、クラッチ装置30を構成する油圧ダイレクトシリンダ47に付与する。アシストスプリング66は出力ホイール63に連結されており、クラッチ装置30を脱離する(クラッチを切る)方向(図2において反時計回り)にアシスト力を発生させ、直流電動モータ61の出力(トルク)がより小さい力で出力ホイール63を回動可能なように構成されている。
【0036】
例えば、図2に示すクラッチアクチュエータ17が制御されていない初期の状態では、出力ロッド64、油圧ダイレクトシリンダ47、クラッチ装置30のバネ反力(プレッシャプレート44をフライホイール41方向に付勢する力)を発生するダイヤフラムスプリング45を介して、プレッシャプレート44に圧着荷重が生じている。これによってクラッチディスク42にはフライホイール41に向かって圧着荷重が加えられフライホイール41と完全係合してエンジン11側からの回転が完全に伝達可能な状態となっている。
【0037】
一方、クラッチアクチュエータ17が制御され、出力ロッド64の図2における左方への移動によって油圧ダイレクトシリンダ47が作動されると、ダイヤフラムスプリング45の内径部が変形され、これによってプレッシャプレート44を押圧するダイヤフラムスプリング45の外径部の力が弱くなり、フライホイール41に対するクラッチディスク42の圧着荷重が低減されるようになっている。そしてフライホイール41とクラッチディスク42との間には、出力ロッド64のクラッチアクチュエータ作動量Saの大きさに応じ、滑り(スリップ)が発生して、係合状態である、いわゆる半クラッチ状態となる。そして、エンジントルクTeが自動変速機13の入力軸34に前記係合状態に応じて伝達される。
【0038】
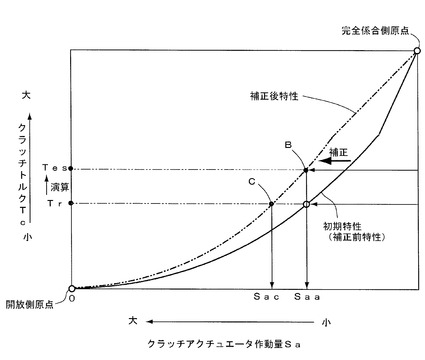
図3において、実線グラフは初期状態(車両出荷状態)におけるクラッチアクチュエータ作動量Saと、該クラッチアクチュエータ作動量Saだけ作動させた時に自動変速機13の入力軸34に伝達されるエンジントルク(=クラッチトルクTc)との対応関係を示したクラッチトルクマップであり、AMT/ECU24のROMに記憶されている(クラッチトルク−作動量記憶手段51に相当)。図3では、表の右端がフライホイール41とクラッチディスク42との間が完全に係合している完全係合状態を示し、左端がフライホイール41とクラッチディスク42との間が切断されている開放状態を示している。そして完全係合状態若しくは開放状態のいずれか一方の点を制御の原点としている。
【0039】
前述した目標クラッチトルクTrを得るために、AMT/ECU24はクラッチアクチュエータ17の出力ロッド64の軸方向の作動量を、図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップ(実線グラフ)に基づく目標クラッチトルクTrに対応するクラッチアクチュエータ作動量Saaだけ作動させる。
【0040】
出力ロッド64の作動量は、出力ロッド64の近傍に設けられた非接触式のストロークセンサ67によって検出される。ストロークセンサ67はホールICによる回転角センサであり、AMT/ECU24と接続され、ストロークセンサ67によって検出されたクラッチアクチュエータ作動量SaaのデータがAMT/ECU24に送信される。
【0041】
このとき出力ロッド64がクラッチアクチュエータ作動量Saaだけ作動されて目標クラッチトルクTrになるよう制御された際の実際のクラッチトルクTcの値は、目標クラッチトルクTrからずれている場合がある。これは図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップが車両の出荷時においてクラッチディスクのクッショニング特性などから静的に求められたものであるためである。つまりクラッチトルクTc−クラッチアクチュエータ作動量Sa特性は、時間の経過とともにクラッチフェーシング43の摩耗、フライホイール41やプレッシャプレート44の発熱による摩擦面のμ(摩擦係数)の変化、及び経年劣化等によって出荷時状態から変動する可能性がある。そこで本発明においては、エンジン回転数Neと入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上となった場合において、クラッチトルクTc−クラッチアクチュエータ作動量マップSaの学習を行なうようにした。
【0042】
具体的には変速時に、一の変速比から他の変速比への変速が完了し、クラッチ装置30が係合状態において、差の絶対値|Ne−Ni|が所定値以上の場合に学習を行なう。そしてクラッチ装置30が図3に示すマップに基づいて、クラッチトルクTcが目標クラッチトルクTrとなるように制御しているときに、エンジントルク検出手段56が、そのときにエンジン11を制御している所定のスロットル開度(エンジン出力制御作動量)におけるエンジン回転数Neaに基づいてエンジントルクTeaを求める(図4参照)。そして求めたエンジントルクTeaから後述する推定クラッチトルクTesを推定クラッチトルク演算手段39によって演算し、演算した推定クラッチトルクTesと、目標クラッチトルクTrを得るために作動させた出力ロッド64のクラッチアクチュエータ作動量Saaとを対応させて学習し(図3中B点)、クラッチアクチュエータ作動量Saaに対応するクラッチトルクTcとして推定クラッチトルクTesを置き換える。そして図3の実線グラフをB点を通過する2点鎖線グラフに書き換えて補正する。なお、2点鎖線グラフはB点を通る特性として、予め実験によって導出され準備されているものである。そして、次回目標クラッチトルクTrに制御する際には、このようにして求められ補正された2点鎖線グラフによって制御する。そのため2点鎖線グラフ上において目標クラッチトルクTrとなる点Cに対応するクラッチアクチュエータ作動量Sacだけ出力ロッド64を作動させることによって、より精度よく目標クラッチトルクTrを得ることができる。
【0043】
なお、上記においては、学習条件として差の絶対値|Ne−Ni|が所定値以上であるとした。これは、変速制御装置2が学習を行なうのに所定の継続時間が必要であり、その継続時間が確保できるか否かを、エンジン回転数Neと自動変速機13の入力軸回転数Niとの回転数差に置き換えて判定するようにしたものである。
【0044】
つまりエンジン回転数Neと自動変速機13の入力軸回転数Niとが所定値以上の回転数差を有する場合には、半クラッチ状態(係合状態)でエンジントルクTeがクラッチ装置30に作用している。これにより半クラッチ状態(係合状態)において、そのときの推定クラッチトルクTesを補正後のクラッチトルクとして学習することができる。そこで、エンジントルクが所定値以上であって、学習のために必要な半クラッチ状態(係合状態)の継続時間を確保するために、エンジン回転数Neと入力軸回転数Niとの回転数差に置き換え、学習するために必要な継続時間が確保できるか否かを判定するようにした。よって、差の絶対値|Ne−Ni|の所定値の大きさは、学習するために十分な時間を確保することができる大きさにすればよく、実施者によって実験等に基づき適宜設定すればよい。
【0045】
次に自動変速機13について説明する。自動変速機13は既存のマニュアルトランスミッションに対し、クラッチアクチュエータ17の作動によって係脱を制御されるクラッチ装置30を取り付け、変速を自動化した、いわゆるAMT(オートメイテッドマニュアルトランスミッション)である。自動変速機13は入力軸34及び出力軸35を備えるとともに、複数段の変速比の変速ギヤ列を備えており、本実施形態においては例えば前進5段・後進1段の平行軸歯車式変速機である。前進1〜5速段は1速段から5速段に向かってギヤの変速比が順次小さくなるように構成されており、例えば、1速段〜3速段では1を超える変速ギヤ比であり、4速段では変速ギヤ比1となっており、5速段では1を下回る変速ギヤ比になっている。
【0046】
自動変速機13の入力軸34は、クラッチ装置30側からの動力(クラッチトルクTc)が伝達可能に連結され、出力軸35は、車両の駆動軸15a、15bに差動装置(ディファレンシャル)14を介して動力が伝達可能に連結されている(図1参照)。これによりエンジン11から伝達されたクラッチトルクTcは、変速ギヤ列で増減され、差動装置(ディファレンシャル)14を経由して駆動軸15a、15b、及び駆動輪16a、16bに伝達され車両を駆動させる。また、MG12の出力も同様に差動装置(ディファレンシャル)14を経由して単独で、若しくはエンジン11と共に車両の駆動が可能となっている。
【0047】
自動変速機13には、AMT/ECU24と接続され、AMT/ECU24によって制御される変速段の切り替えを操作するための変速用アクチュエータ群(前述のクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26)が備えられている。
【0048】
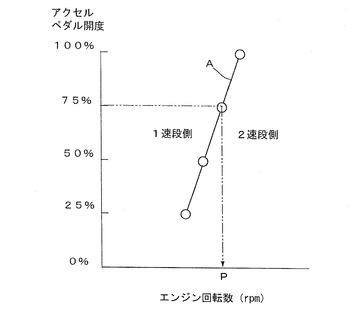
AMT/ECU24は各変速段(変速比)毎に設定された変速線(図5参照)をROMに記憶して有している。図5に示す変速線Aは、代表として例えば1速段(一の変速比)から2速段(他の変速比)への変速線である増速側の1速段変速線を示している。変速線は車両の変速時に利用されるマップデータであり、予め選択した変速段選択パラメータ(本実施形態においてはエンジン回転数とアクセルペダル開度)を各軸にとり、一の変速比から他の変速比への変速の要否を判断するための基準線である。
【0049】
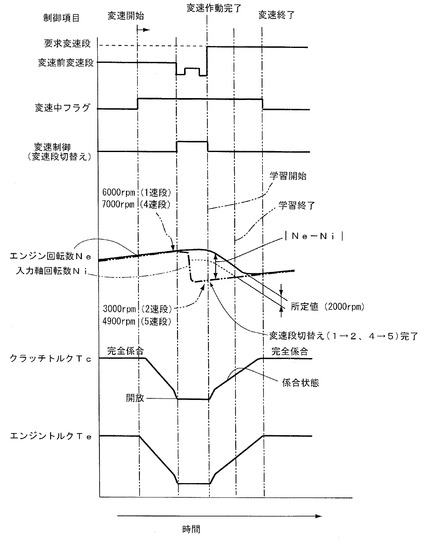
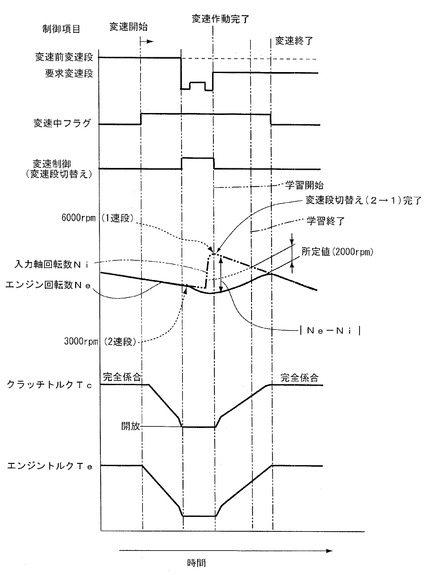
図示しないが、変速線A上には各アクセルペダル開度毎に変速点が存在している。そして例えば運転者が1速段で走行中にアクセルペダル(図略)を例えば全踏み込み量の75%だけ踏み込みエンジン回転数が増加し変速線A上の点であるPrpmと交差すると、AMT/ECU24は、変速制御を開始する。図6に示すように、変速制御が開始されるとENG/ECU21は、スロットル用アクチュエータ69を駆動させてスロットルバルブ70を閉弁側に作動開始させ、エンジントルクTeをHV/ECU21の指令値に基づいて減少させる(図6中、制御項目のエンジントルクTeの欄参照)。略同時にAMT/ECU24は、クラッチアクチュエータ17の作動を開始し、クラッチアクチュエータ17の出力ロッド64を図2において左方に移動させてクラッチ装置30のフライホイール41とクラッチディスク42とを脱離させ、やがて係合を切断する(図6中、制御項目のクラッチトルクTcの欄参照)。この状態において、スロットルバルブ70はいわゆる全閉状態に閉弁されエンジントルクTeは最小となる。
【0050】
AMT/ECU24は上記においてスロットルバルブ70が閉弁されクラッチ装置30の係合が切断された状態でシフトアクチュエータ18、及びセレクトアクチュエータ26を適宜駆動し自動変速機13のギヤ列(変速段)を例えば1速段→2速段に切替える(図6中、制御項目の変速制御の欄参照)。そしてギヤ列(変速段)の切替え終了後、ENG/ECU23は、スロットル用アクチュエータ69を駆動しスロットルバルブ70をHV/ECU21を介したAMT/ECU24からの指令値に合わせて開弁させエンジントルクTeを増加させていく。
【0051】
略同時に、AMT/ECU24は、クラッチ装置30を再度係合させていくためにクラッチアクチュエータ17を駆動してクラッチアクチュエータ作動量Saをクラッチ装置30の係合方向に変化させる。そして、クラッチトルクTcがAMT/ECU24から指令された目標クラッチトルクTrとなるように図3の実線グラフのマップに基づいてクラッチアクチュエータ作動量Saが目標クラッチトルクTrに対応する作動量Saaとなるよう制御する。このようにしてエンジン回転数Neと、変速作動後の自動変速機13の入力軸回転数Niとが良好に適合できるようエンジントルクTeをクラッチ装置30に作用させて半クラッチ状態(係合状態)とし、最終的にフライホイール41とクラッチディスク42とを完全係合させ2速段への変速作動を完了する。なお、上記の説明において、シフトアクチュエータ18、及びセレクトアクチュエータ26の駆動方法については公知であるので詳細な説明は省略する(特開2004−176894参照)。
【0052】
なお、上記において変速制御開始後のエンジントルクTeの減少中、及びクラッチ装置30の係合が切断された状態においては、不足する駆動力を補うためにMG12を駆動させMG12の駆動トルクをディファレンシャル14を介して駆動軸15a、15b、及び駆動輪16a、16bに付与するよう制御してもよい。これによって運転者に失速感を感じさせないようにすることができる。
【0053】
前述したように、HV/ECU21は、ハイブリッド車両1全体を統括制御し、AMT/ECU24は、変速制御装置2を構成するクラッチトルク−作動量記憶手段51、クラッチ制御手段52、対応関係補正手段53、エンジン回転数検出手段54、入力軸回転数検出手段37、回転差変化量検出手段48、エンジン出力制御手段49、エンジン出力制御作動量検出手段55、エンジントルク検出手段56、推定クラッチトルク演算手段39、及び推定クラッチトルク補正手段57を備えている(図1参照)。また、対応関係補正手段53は、変速作動完了検出手段58と、回転差判定手段59と、クラッチトルク−作動量補正手段60と、を有している。AMT/ECU24は、これらの各手段によってクラッチ装置30のクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を変速段の変速中に学習し補正する。
【0054】
クラッチトルク−作動量記憶手段51は、図3に示す、クラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップ(実線グラフ)をROMに記憶しているとともに、補正されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を記憶する。
【0055】
クラッチ制御手段52は車両が要求する所要の目標クラッチトルクTrを得るためにクラッチアクチュエータ17が制御すべきクラッチアクチュエータ作動量Saaをクラッチトルク−作動量記憶手段51から求める。そして求めたクラッチアクチュエータ作動量SaaデータをAMT/ECU24に送信し、AMT/ECU24によってクラッチアクチュエータ17を駆動させ出力ロッド64を対応するクラッチアクチュエータ作動量Saaだけ作動させ、クラッチトルクTcが目標クラッチトルクTrになるよう制御する。
エンジン回転数検出手段54は、エンジン11の出力軸31に設けられたエンジン回転数センサ72によってエンジン回転数Neを検出する。また、エンジン出力制御作動量検出手段55はスロットルセンサ68を備え、エンジントルクTeを制御するスロットルバルブ70(エンジン出力制御手段49を構成する)のスロットル開度(エンジン出力制御作動量)をスロットルセンサ68によって検出する。
【0056】
エンジントルク検出手段56は、事前に準備され、AMT/ECU24のROMに記憶されているエンジン出力制御作動量の各作動量である各スロットル開度におけるエンジン回転数NeとエンジントルクTeとの関係(図4参照)に基づいて、エンジン出力制御作動量検出手段55が検出したスロットル開度とエンジン回転数検出手段54が検出したエンジン回転数NeとからエンジントルクTeを検出する。
【0057】
入力軸回転数検出手段37は、自動変速機13の入力軸34近傍に設けられた入力軸回転数センサ36によって入力軸34の入力軸回転数Niを検出する。入力軸回転数センサ36は、非接触式のセンサであり、AMT/ECU24に接続され、検出された回転数信号はAMT/ECU24に送信される。
【0058】
回転差変化量検出手段48は、後に詳述する回転差判定手段59によって検出された所定値以上であったエンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|の変化量、すなわち微分値を演算し、該微分値が所定値以下であるか否かを判定する。変化量(微分値)が所定値以下であれば、エンジントルクがクラッチに作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していくことを示している。このように変化割合が所定値以下であるとき、すなわち検出した差の絶対値が徐々に減少していく場合に学習を行なうようにすれば、係合状態の継続時間が確保され発進時に学習を行なう場合と同様に安定して精度のよいデータを取得できる。なお、変化量の所定値は任意に設定すればよい。
【0059】
推定クラッチトルク演算手段39は、クラッチ制御手段52がクラッチアクチュエータ17を目標クラッチトルクTrに対応するクラッチアクチュエータ作動量Saa作動させたとき、エンジントルク検出手段56がスロットル開度(エンジン出力制御作動量)と該スロットル開度のときのエンジン回転数Neaとから演算したエンジントルクTea(図4参照)からエンジン回転数Neaの加速度にエンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクTesを演算する。
【0060】
推定クラッチトルクTesは、特開2005−214331号公報に記載された手法と同様に、下記式(1)によって求められる。下記式(1)はクラッチ装置30のクラッチアクチュエータ作動量Saを図3に示す開放側原点から完全係合状態に向かってクラッチアクチュエータ作動量Saaまで変化(作動)させ所定の目標クラッチトルクTrとなるよう制御した場合に実際に出力されるクラッチトルクTcを推定クラッチトルクTesとして演算するものである。
(数1)
Tes=Te−J・(dNe/dt)・・・(1)
上式(1)において、Tesは、推定クラッチトルク、Teは、エンジントルク、Jはエンジンに固有の設計値であるエンジンイナーシャ(回転慣性モーメント)、Neは、エンジン回転数、dNe/dtはエンジン回転数加速度をそれぞれ表すものとする。
【0061】
学習条件として、エンジン回転が安定状態に到った場合に上記式(1)の演算を行って、推定クラッチトルクTesを定めることができる。例えば、推定クラッチトルク演算手段39は、上式(1)の右辺第2項のエンジン回転数加速度dNe/dtを監視し、dNe/dtが所定の範囲に入った場合に、学習条件が成立したと判定し、推定クラッチトルクTesの演算を行うことができる。これによって推定クラッチトルクTesの演算結果が安定するとともに、より精度よく演算結果を得ることができる。なお、学習条件である所定の範囲はどのように設定してもよい。
【0062】
推定クラッチトルク補正手段57は、推定クラッチトルク演算手段によって演算された推定クラッチトルクTesを、エンジン回転数Neおよび入力軸回転数Niの少なくとも一方に応じて補正する。なお、本実施形態においてはエンジン回転数Ne、及び入力軸回転数Niの両方について補正を行なうものとする。
【0063】
まず、エンジン回転数Neに応じて推定クラッチトルクTesの値を補正する場合について説明する。上述したように本実施形態におけるクラッチ装置30の係合状態においては、バネ反力を発生するダイヤフラムスプリング45が梃子のように作用点をプレッシャプレート44の外周部に押し当ててプレッシャプレート44に圧着荷重を生じさせている。これにより、プレッシャプレート44には錘が付加されたような作用が生じエンジン回転数に比例して該錘の遠心力が大きくなりエンジン11からの伝達トルクが変化することがわかった。このため上記式(1)に基づき演算された推定クラッチトルクTesの演算値に対し、発生した遠心力分だけ補正するものとする。このようにして補正後推定クラッチトルクTesengを演算し、推定クラッチトルクTesをより正確な値に近づける。なお、補正値はクラッチ装置の構造等によってそれぞれ異なるため実験によって求めた値を適用する。
【0064】
次に、自動変速機13の入力軸34の入力軸回転数Niに応じて推定クラッチトルクTesを補正する場合について説明する。発明者は入力軸回転数Niの大きさに比例して推定クラッチトルクTesの値が変動することを実験によって見いだした。このため、入力軸回転数Niの大きさに応じてクラッチトルクTcを変動させる変動分を実験によって求め、上記においてエンジン回転数Neに応じて補正された補正後推定クラッチトルクTesengに対し前記求めた変動分を補正し、補正後推定クラッチトルクTesnsを演算する。なお、本実施形態においてはエンジン回転数による補正を入力軸回転数による補正よりも先に実施しているが、入力軸回転数による補正を先に実施してもよい。
【0065】
対応関係補正手段53は、クラッチアクチュエータ17を作動させたとき、クラッチ装置30によって伝達されたクラッチトルクTcとクラッチアクチュエータ作動量Saとの関係を学習し、クラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を補正するものである。
【0066】
対応関係補正手段53は、前述したように変速作動完了検出手段58と、回転差判定手段59と、クラッチトルク−作動量補正手段60とを有している。
変速作動完了検出手段58は、自動変速機13の変速時において自動変速装置の変速作動、すなわち変速段の切替えが完了したことをAMT/ECU24からの信号によって検出する。
【0067】
回転差判定手段59は、自動変速機13の変速時に、クラッチ装置30が係合状態において、エンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する。なお、本実施形態において自動変速機13の変速時とは、所定のアクセルペダル開度におけるエンジン回転数Neが複数段の変速比毎に準備された複数の変速線のいずれか一つを超えて変速開始となったときから、自動変速機13の変速段の切替え(変速作動)が完了し、クラッチ装置30が係合状態を経て、再び完全係合状態に至るまでの間をいう(図6中、変速中フラグの項目参照)。
【0068】
クラッチトルク−作動量補正手段60は、変速時に変速段の切替え(変速作動)が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であるときに、推定クラッチトルク補正手段57によって演算された補正後推定クラッチトルクTesnsが所定値以上であるか否かを判定する。そして補正後推定クラッチトルクTesnsが所定値以上であれば、図3に示すクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において、目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクTcの値を補正後推定クラッチトルクTesnsに置き換えRAMに記憶し、図3のマップを補正する。
【0069】
なお、補正後推定クラッチトルクTesnsの大きさを判定する所定値は、補正後推定クラッチトルクTesnsに対応して求めるクラッチアクチュエータ作動量Sacのばらつきを抑制するためのものである。つまり、補正後推定クラッチトルクTesnsの値が低すぎるときには、図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップにおいて、マップの傾きが小さな領域を使用することになる(図3において左方)。このため、補正後推定クラッチトルクTesnsのばらつきによって補正後推定クラッチトルクTesnsに対応するクラッチアクチュエータ作動量Sacの値のばらつきが大きくなる虞がある。このため、補正後推定クラッチトルクTesnsの値を所定値以上とし、マップの傾きが大きな領域で補正後推定クラッチトルクTesnsに対するクラッチアクチュエータ作動量Sacを学習するようにし、補正後推定クラッチトルクTesnsのばらつきに対応するクラッチアクチュエータ作動量Sacのばらつきを抑制するようにした。所定値は実施者によって任意に設定すればよい。
【0070】
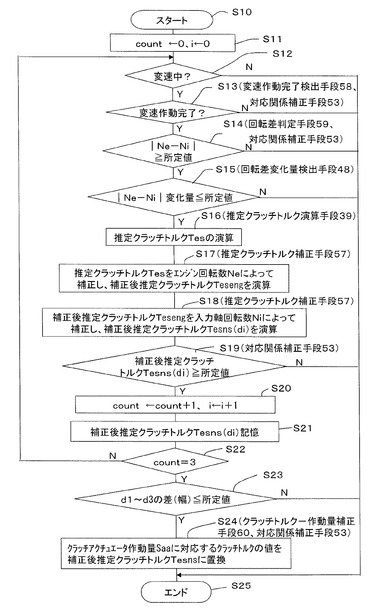
次に本発明に係る変速制御装置2の制御について図7のフローチャート、及び図6の制御状態図に基づき説明する。なお、本実施形態においては、変速作動の一例として変速比の差が比較的大きく、変速時において大きな回転数差の絶対値|Ne−Ni|を得やすい変速段である低速段でのアップシフト変速(1速段→2速段)について説明する。また、回転数差の絶対値|Ne−Ni|の所定値を例えば2000rpmとする。
【0071】
ハイブリッド車両1が起動されると、フローチャートがスタートする(ステップS10)。前述したように本実施形態においてはハイブリッド車両1の発進時には、MG12によって発進する。これにより発進時、エンジン11は始動されておらずクラッチ装置30の係合は切断されている。そして、その後、例えばMG12を駆動するバッテリの充電量が不足していたり、運転者がアクセルペダルを踏み込み加速を要求したりすることによってHV/ECU21がENG/ECU23に指令信号を送信し、イグニッションスイッチ73をONさせ、エンジン11が始動される。
【0072】
ステップS11では、カウンタ(count)と、補正後推定クラッチトルクTesnsのデータ番号を示す添え字(i)を初期化する。
ステップS12では、エンジン回転数Neが複数の変速線のいずれか一つ(本実施形態においては1速段増速側変速線)を超え変速中(変速時)となったか否かを判定する。そして変速中であることを確認するとステップS13に移動し、変速中でなければ学習を行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0073】
ステップS13(対応関係補正手段53、変速作動完了検出手段58)では一の変速比から他の変速比への切替え動作である変速作動が完了したか否かをAMT/ECU24からの信号によって確認する。そして変速作動の完了を確認するとステップS14に移動し、完了が確認されなければステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0074】
ステップS14(対応関係補正手段53、回転差判定手段59)では、クラッチ装置30の係合状態において、まずエンジン回転数検出手段54により検出されたエンジン回転数Neと、入力軸回転数検出手段37によって検出された自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|を演算する。
【0075】
このとき例えば運転者が加速を要求してアクセルを踏込み、自動変速機13が1速段(一の変速比)から2速段(他の変速比(変速比は1速段の変速比の1/2とする))にアップシフトして変速した場合、2速段に変速したことによって、入力軸回転数Ni2は1速段時の入力軸回転数Ni1の略半分となる。 つまりハイブリッド車両1が、1速段で入力軸回転数Ni1が例えば6000rpm(車速45km/h)にて走行している場合には、2速段にアップシフトすることによって入力軸回転数Ni2は略3000rpm(車速略45km/h)に減少する。これにより、1速段から2速段への変速作動完了後でクラッチ装置30の係合状態開始時においては、入力軸回転数Ni2とエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は略3000rpmとなる。そして回転数差の絶対値|Ne−Ni|が所定値(本実施形態においては例えば2000rpmとする)以上であるか否かを判定する。上記条件のように絶対値|Ne−Ni|が3000rpmであれば所定値(2000rpm)以上であるのでステップS15に移動する。また、所定値以下であれば学習を適切に行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0076】
ステップS15(回転差変化量検出手段48)では、エンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|の変化量、すなわち微分値を演算し、該微分値が所定値以下であるか否かを判定する。変化量(微分値)が所定値以下であれば、制御を続行するためステップS16に移動し推定クラッチトルクTesを演算する。また、所定値以下であれば学習を適切に行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0077】
ステップS16(推定クラッチトルク演算手段39)では、上述のとおりに式(1)に基づき、そのときの実際のエンジン回転数Neaとスロットル開度とに基づいて求めた、実際のエンジントルクTeaから推定クラッチトルクTesを演算する。
【0078】
ステップS17(推定クラッチトルク補正手段57)では、ステップS16で演算された推定クラッチトルクTesを上述したように、そのときのエンジン回転数Neaの大きさに応じて実験値に基づき補正し、補正後推定クラッチトルクTesengを演算する。
【0079】
ステップS18(推定クラッチトルク補正手段57)では、ステップS17で求めた補正後推定クラッチトルクTesengを、上述したようにそのときの入力軸回転数Niaの大きさに応じて実験値に基づき補正し、補正後推定クラッチトルクTesns(di)を演算する。なお、ここでdiはデータNOを示す。
【0080】
ステップS19(対応関係補正手段53)では、ステップS18において補正した補正後推定クラッチトルクTesns(di)が所定値以上であるか否かを判定する。そして所定値以上であればステップS20に移動し所定値以下であればステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0081】
ステップS20では、カウンタ(count)、及び補正後推定クラッチトルクTesns(di)のデータ番号を示す添え字(i)に1を加算する。
【0082】
ステップS21では、補正後推定クラッチトルクTesns(di)をROMに記憶する。
【0083】
ステップS22では、補正後推定クラッチトルクTesns(di)のデータ取得回数に一致するカウンタ(count)が3であるかを確認し、3であればステップS23に移動し、3でなければステップS12に移動し、再びステップS12〜ステップS21の制御を繰り返す。なお、本実施形態においてはカウンタの値を3としたが、これに限らず2でもよいし、4以上でもよい。
【0084】
ステップS23では取得し記憶された補正後推定クラッチトルクTesns(d1)〜(d3)の値の差(幅)が所定値以下であるか確認する。所定値以下であれば、エンジントルクTeがクラッチ装置30に作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していく状態で安定してデータが取得できたといえ、これによって補正後推定クラッチトルクTesnsのデータの信頼性が確認できる。そして補正を行なうためにステップS24に移動する。また所定の範囲を越えていれば、何らかの原因で差の絶対値|Ne−Ni|が大きく変化した可能性があるので取得したデータを使用せずステップS25に移動してプログラムを終了し、ステップS10にもどる。なお、所定の範囲は任意に設定すればよい。
【0085】
ステップS24(対応関係補正手段53、クラッチトルク−作動量補正手段60)では、クラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において、目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクTcの値を補正後推定クラッチトルクTesnsに置き換えRAMに記憶し、図3のマップを補正する。なお、このとき置き換える補正後推定クラッチトルクTesnsは補正後推定クラッチトルクTesns(d1)〜(d3)までの平均値をとってもよいし、中央の値をとってもよい。また、いずれか1点を選択してもよい。そして、次回からの制御においては補正後のマップによってクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係の制御を行なう。
【0086】
上述の説明から明らかなように、本実施形態においては、学習条件として自動変速機13(自動変速装置)が変速時となり、変速段の変速作動(切替え)の完了が変速作動完了検出手段58によって検出されるとともに、クラッチ装置30が係合状態となった場合において、エンジン回転数Neと自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることが回転差判定手段59によって確認される。この状態において、エンジントルク検出手段56によってそのときのスロットル開度(エンジン出力制御作動量)とエンジン回転数と からエンジントルクTeが求められる。
【0087】
そして推定クラッチトルク演算手段39が、クラッチ制御手段52によって目標クラッチトルクTrに制御されたときに実際に出力したクラッチトルクTcの推定値である推定クラッチトルクTesを前記求めたエンジントルクTeから演算する。その後、クラッチトルク−作動量補正手段60が、クラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクの値を推定クラッチトルクTesに置き換えて補正する。
【0088】
このように変速中に変速作動が完了しクラッチ装置30が係合状態となっている場合において、エンジン回転数Neと入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上に大きい場合には、エンジントルクTeがクラッチ装置30に作用した状態で、そのときの推定クラッチトルクTesに基づいて補正後のクラッチトルクとするための学習が充分できる。
【0089】
また、上述したとおり推定クラッチトルク補正手段57は、推定クラッチトルク演算手段39によって演算された推定クラッチトルクTesをエンジン回転数Neおよび入力軸回転数Niに応じて補正する。これによって推定クラッチトルクの演算精度はさらに向上し、補正精度が向上する。ただし、本実施形態の形態に限らず、推定クラッチトルク補正手段57では、エンジン回転数Ne、及び入力軸回転数Niのいずれか一方だけ補正するようにしてもよいし、いずれの補正も実施しなくてもよく、これらによっても相応の効果は得られる。
【0090】
また、本実施形態においては、回転差変化量検出手段48が差の絶対値の変化割合が所定値以下であることを検出することによって、エンジントルクTeがクラッチ装置30に作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していくことを検出する。そして変化割合(微分値)が所定値以下であるとき、すなわち検出した差の絶対値が徐々に減少していく場合に学習を行なうようにするので、発進時に学習を行なう場合と同様に安定して精度のよいデータを取得できる。
【0091】
さらに、本実施形態のハイブリッド車両1は、クラッチ装置30がエンジン11のアウトプットシャフト(出力軸31)と自動変速機13の入力軸34とを係脱可能に連結し、MG12が、自動変速機13の出力軸35に回転連結されるとともに駆動軸15a、15bを介して駆動輪16a、16bに回転連結されている、いわゆるパラレル方式のハイブリッド車両である。このように構成されるハイブリッド車両1ではMG12のみの駆動力によって発進することもでき、そのときは発進時におけるクラッチアクチュエータ作動量Saの学習の機会が少なくなる。しかし、本発明では所定の条件における変速時において、クラッチアクチュエータ作動量の学習の機会を増やすことができるのでクラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を適宜補正しながら安定した変速制御を実施することができる。
【0092】
なお、本実施形態においては、フローチャートにおけるステップS23において、取得し記憶された補正後推定クラッチトルクTesns(d1)〜(d3)の値の差(幅)が所定値以下であるか確認する制御を設けた。しかしステップS23の制御は廃止してもよい。これによっても相応の効果は得られる。またそのときのフローチャートにおいては、ステップS11、ステップS20〜ステップS23を削除すればよい。また、ステップS15(回転差変化量検出手段48)の制御を廃止してもよい。これによっても相応の効果は得られる。
【0093】
また、本実施形態においては、ステップS17、18(推定クラッチトルク補正手段57)において、推定クラッチトルクTesをエンジン回転数Ne、及び入力軸回転数Niに応じて補正したが、これに限らず、入力軸回転数Niとエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|に応じてそれぞれ補正係数を求め補正するようにしてもよい。
【0094】
また、本実施形態においては、入力軸回転数Niとエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|が大きくなる場合として、低速段(1速段→2速段)のアップシフトの切替えの場合について説明した。しかしこの形態に限らず、別の実施例として例えば高速段である4速段(一の変速比)から、変速比が4速段の例えば70%である5速段(他の変速比)にアップシフトする場合についても条件を満たすことはでき、本発明を適用できる。
【0095】
つまり、4速段での入力軸回転数Ni4が、例えば7000rpm等の高い回転数であれば、5速段にアップシフトしたときの5速段での入力軸回転数Ni5は4900rpm(7000rpm×0.7)となる。これにより変速段を5速段に切替えた後に、クラッチ装置30の係合を開始するときのエンジン回転数Neが4速段のときのエンジン回転数Neと略同一であるとすると、5速段での入力軸回転数Ni5と、クラッチ装置30の係合開始時におけるエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は略2100rpmとなる。これによっても所定値2000rpmを上回っているので学習を実施し好適にデータを取得することができる。
【0096】
さらに、別の実施例として、図8の制御状態図に示すように、例えば運転者が意図して減速しようとしアクセルペダルを離して、自動変速機13が例えば2速段(一の変速比)から1速段(他の変速比(変速比は2速段の2倍とする))にダウンシフトして変速しようとした場合においても、同様に学習を行なう条件である大きな入力軸回転数Ni1とエンジン回転数Neとの差の絶対値|Ne−Ni1|を得ることができる。
【0097】
つまり、変速比を2速段から1速段に変速したことによって、1速段における入力軸回転数Ni1は2速段時の入力軸回転数Ni2の略倍となる。よって2速段で走行するハイブリッド車両1が、入力軸回転数Ni2が3000rpm(車速45km/h)にて走行している場合には、1速段にダウンシフトすることによって入力軸回転数Ni1は略倍の略6000rpm(車速略45km/h)となる(図8中2点鎖線参照)。そして、クラッチ装置30の係合を再び開始するときには、エンジン回転数Neは2速段での走行時のエンジン回転数Neに対しアクセルペダルを離している分だけ低く制御されるので、入力軸回転数Ni2とエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は3000rpmを越える値となり所定値である2000rpmを大きく上回っているので学習を実施し好適にデータを取得することができる。このときエンジン回転は入力軸回転に引きずられる形となり、負のトルクとしてクラッチ装置30に作用するので、クラッチ装置30は良好に係合状態となり、そのときの推定クラッチトルクTesを補正後のクラッチトルクとするために充分に学習することができる。
【0098】
このように、上述した形態を含み、その他、様々な状況において、変速中に変速作動が完了しクラッチが係合状態となっている場合において、エンジン回転数Neと入力軸回転数Niとの間の差の絶対値|Ne−Ni|を求め、該差の絶対値|Ne−Ni|が所定値より大きいときに適宜学習を実施するので適切に学習の機会を増やすことができる。
【0099】
また、図7のフローチャートのステップS14に示すように本実施形態では、エンジン回転数Neと入力軸回転数Niとの間の差の絶対値|Ne−Ni|をまず求め、|Ne−Ni|が所定値以上であるときにステップS15以降の制御を実施するようにした。しかしこの形態に限らず、ステップS14では差の絶対値|Ne−Ni|のみをまず求め、ステップS15〜ステップS18までの制御を変速中において繰り返して実行し、取得した全てのデータをステップS14で取得した差の絶対値|Ne−Ni|とそれぞれ対応させて記憶するように制御してもよい。そしてクラッチ装置30が完全係合した変速終了後に、記憶した全てのデータの中から各データに対応する差の絶対値|Ne−Ni|が所定値(例えば2000rpm)を越えているデータのみを抽出してステップS19以降の制御を実行し、マップを補正するようにしてもよい。これによっても同様の効果が得られる。
【0100】
さらに、本実施形態では、エンジン11とMG12とが並列的な関係にあって、それぞれが独立して車両を駆動可能な構成のハイブリッド車の例を挙げて説明した。しかし、この構成に限らず、MGとエンジンとが直列に連結されMGで出力される駆動力が、差動装置(ディファレンシャル)14に伝達されるハイブリッド車や、エンジンのみによって走行する一般的な車両のクラッチ学習制御にも適用可能である。さらには、A/T車におけるトルクコンバータのクラッチ学習制御にも適用可能である。
【符号の説明】
【0101】
1・・・ハイブリッド車両、2・・・変速制御装置、11・・・エンジン、12・・・モータジェネレータ(MG)、13・・・自動変速装置(自動変速機)、17・・・クラッチアクチュエータ、18・・・シフトアクチュエータ、21・・・HV/ECU、22・・・MG/ECU、23・・・ENG/ECU、24・・・AMT/ECU、26・・・セレクトアクチュエータ、30・・・クラッチ(クラッチ装置)、31・・・アウトプットシャフト(エンジン出力軸)、34・・・自動変速機入力軸、35・・・自動変速機出力軸、36・・・入力軸回転数センサ、37・・・入力軸回転数検出手段、39・・・推定クラッチトルク演算手段、48・・・回転差変化量検出手段、49・・・エンジン出力制御手段、51・・・クラッチトルク−作動量記憶手段、52・・・クラッチ制御手段、53・・・対応関係補正手段、54・・・エンジン回転数検出手段、55・・・エンジン出力制御作動量検出手段、56・・・エンジントルク検出手段、57・・・推定クラッチトルク補正手段、58・・・変速作動完了検出手段、59・・・回転差判定手段、60・・・クラッチトルク−作動量補正手段、67・・・ストロークセンサ、68・・・スロットルセンサ、69・・・スロットル用アクチュエータ、70・・・スロットルバルブ、72・・・エンジン回転数センサ、Ne・・・エンジン回転数、Tc・・・クラッチトルク、Te・・・エンジントルク、Tes・・・推定クラッチトルク。
【技術分野】
【0001】
本発明は、内燃機関とモータジェネレータ(バッテリに蓄えられた電力から駆動輪に伝達する駆動力を発生し、回生時には駆動輪によって駆動されて電力を回生する)、及び自動化されたクラッチ装置を備え、クラッチ係合時のクラッチアクチュエータの作動量を学習することによって好適にクラッチトルクを制御するハイブリッド車両の変速制御装置に関する。
【背景技術】
【0002】
従来、内燃機関(エンジン)を駆動源とする車両において、既存のマニュアルトランスミッションに各アクチュエータを取り付け、運転者の意思、若しくは車両状態により一連の変速操作(クラッチの断接、ギヤシフト、及びセレクト)を自動的に行なう自動変速機(以下、AMT(オートメイテッドマニュアルトランスミッション)という)が知られている。該AMTは、例えば、クラッチの制御においては、車両特性から要求されるクラッチトルクをクラッチアクチュエータの作動量であるクラッチアクチュエータ作動量に変換して制御している。出荷時において上記クラッチトルクとクラッチアクチュエータ作動量との関係は、クラッチディスクのクッショニング特性などから静的に求められるものであるが、実車では、クラッチフェーシングの摩耗、発熱によるμ(摩擦係数)変化、経年劣化等、動的な変動要因が大きく作用することが知られている。
【0003】
このように、クラッチトルクとクラッチアクチュエータ作動量との関係が変化してくると、AMTの場合、変速時のクラッチ切断操作と係合操作とが意図したタイミングどおりに行なわれなくなり、例えばクラッチ切断時間が意図した時間を越えて長くなると、クラッチ切断中にはエンジンからのトルクが車輪に伝達されず運転者が失速感を感じる虞れがある。また、クラッチ切断時間が長くなると、負荷を受けないエンジンが過大に吹き上がりクラッチ係合動作時にエンジンの回転数と変速機の入力軸回転数の差が大きくなって過大な変速ショックが発生する虞もある。そこで、クラッチトルクとクラッチアクチュエータ作動量との関係を適宜学習し、その関係を定めるクラッチトルクマップを補正していく技術が提案されている(例えば、特許文献1)。特許文献1に示す技術では、クラッチ係脱操作を行なう発進時に学習を行っている。発進時には変速機の入力軸回転数は略0となっており、これによって常時安定したクラッチトルクとクラッチアクチュエータ作動量の関係が取得できる。そして該取得したデータによってクラッチトルクとクラッチアクチュエータ作動量との関係を補正し、クラッチ切断時間が好適なものとなるようにして、失速感の発生や、エンジンの過大な吹き上がりによる変速ショックの発生等を抑制している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−214331号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1に開示された従来の技術を、内燃機関とモータジェネレータ、とを備えたハイブリッド車両であって、発進時にはモータジェネレータのみによって発進するモードを有する例えばパラレルハイブリッド車両等に適用しようとした場合、発進時においては、クラッチ装置の係合操作が不要であるので、クラッチアクチュエータ作動量を学習することができない。また発進時以外の例えば通常の変速時においてクラッチアクチュエータ作動量を学習しようとすると、クラッチアクチュエータ作動量を学習する要件となる、いわゆる半クラッチ状態の時間が短かいので学習には適さないとされていた。これらより学習の機会が大幅に減少しクラッチトルクとクラッチアクチュエータ作動量の補正精度が悪化する虞があった。
【0006】
そして、一般的にハイブリッド車両の場合、エンジン走行における変速時のクラッチ切断時には、モータジェネレータによって駆動力をアシストし、失速感等が出ないように制御される。しかし、上述したクラッチトルクとクラッチアクチュエータ作動量の補正精度の悪化によってクラッチ切断時間が意図した時間を越えて長くなると、クラッチ切断とモータジェネレータによるアシストとのタイミングが合わず、これによって失速感が発生したり、エンジンの過大な吹き上がりによる変速ショックが発生したりする虞れがある。
【0007】
本発明は上記課題に鑑みてなされたものであり、各種変速状態においてクラッチアクチュエータ作動量の学習に適した変速状態を抽出して学習を行なうことによってクラッチアクチュエータ作動量の補正精度を向上させることが可能な変速制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、請求項1に係るハイブリッド車両の変速制御装置は、車両に搭載されたエンジンが出力するエンジントルクによって回転されるよう適合された入力軸の回転を前記エンジンのエンジン回転数が複数段の変速比毎に準備された各変速線を越えたときに一の変速比から他の変速比に変速して前記車両の駆動輪に回転連結された出力軸に伝達する自動変速装置と、クラッチアクチュエータの作動によって前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱するとともに、係合状態において前記アウトプットシャフトから前記入力軸に伝達されるクラッチトルクを目標クラッチトルクに制御するクラッチと、前記クラッチのクラッチトルクを制御する前記クラッチアクチュエータのクラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を記憶するクラッチトルク−作動量記憶手段と、所要の目標クラッチトルクに対応する前記クラッチアクチュエータのクラッチアクチュエータ作動量を前記クラッチトルク−作動量記憶手段から求め前記クラッチアクチュエータを前記クラッチアクチュエータ作動量作動させて前記クラッチトルクを前記目標クラッチトルクに制御するクラッチ制御手段と、前記エンジンのエンジン回転数を検出するエンジン回転数検出手段と、前記エンジンの出力を制御するエンジン出力制御手段の作動量を検出するエンジン出力制御作動量検出手段と、前記エンジン出力制御手段の各作動量における前記エンジンの回転数と前記エンジントルクとの関係に基づいて前記エンジン出力制御作動量検出手段が検出したエンジン出力制御作動量と前記エンジン回転数検出手段が検出したエンジン回転数とから前記エンジントルクを演算するエンジントルク検出手段と、前記クラッチ制御手段が前記クラッチアクチュエータを前記目標クラッチトルクに対応するクラッチアクチュエータ作動量作動させたとき、前記エンジントルク検出手段が前記エンジン出力制御作動量と前記エンジン回転数とから演算したエンジントルクから前記エンジン回転数の加速度に前記エンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクを演算する推定クラッチトルク演算手段と、前記クラッチアクチュエータを作動させたとき、前記推定クラッチトルク演算手段によって演算された推定クラッチトルクと前記クラッチアクチュエータ作動量との関係を学習し、前記クラッチトルク−作動量記憶手段に記憶された前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を補正する対応関係補正手段と、前記自動変速装置の前記入力軸の入力軸回転数を検出する入力軸回転数検出手段と、前記自動変速装置の入力軸又は出力軸に回転連結されたモータと、を備え、前記対応関係補正手段は、前記自動変速装置の変速時に、前記自動変速装置の変速作動が完了したことを検出する変速作動完了検出手段と、前記変速作動完了検出手段によって変速作動の完了が検出された後に、前記クラッチが前記係合状態において、前記エンジン回転数と前記自動変速装置の前記入力軸回転数との差の絶対値が所定値以上であることを判定する回転差判定手段と、前記変速時に前記変速作動が完了し、且つ前記差の絶対値が前記所定値以上であることを条件とし、前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係において、前記クラッチ制御手段によって前記クラッチアクチュエータに作動された前記目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクに置き換えるクラッチトルク−作動量補正手段と、を有する。
【0009】
上記課題を解決するため、請求項2に係るハイブリッド車両の変速制御装置は、請求項1において、前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクを、前記エンジン回転数および前記入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有する。
【0010】
上記課題を解決するため、請求項3に係るハイブリッド車両の変速制御装置は、請求項1または2において、前記差の絶対値の変化割合が所定値以下であることを検出する回転差変化量検出手段を有する。
【0011】
上記課題を解決するため、請求項4に係るハイブリッド車両の変速制御装置は、請求項1乃至3のいずれか1項において、前記クラッチは前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱可能に連結し、前記モータは、前記自動変速装置の出力軸に回転連結されるとともに前記駆動輪にモータ減速比で回転連結されている。
【発明の効果】
【0012】
請求項1に係る発明によれば、学習条件として自動変速装置が変速時となり、変速作動の完了が変速作動完了検出手段によって検出されるとともに、クラッチが切断状態から完全に接続される状態に向かって徐々に繋がっていく係合状態において、エンジン回転数と自動変速装置の入力軸回転数との差の絶対値が所定値以上であることが回転差判定手段によって判定されると、エンジントルク検出手段によってそのときのエンジン出力制御作動量とエンジン回転数とからエンジントルクが求められる。そして推定クラッチトルク演算手段が、クラッチトルクがクラッチ制御手段によって目標クラッチトルクに制御されたときに実際に出力したクラッチトルクの推定値である推定クラッチトルクを前記求めたエンジントルクから演算する。その後、クラッチトルク−作動量補正手段が、クラッチトルク−作動量記憶手段に記憶されたクラッチアクチュエータ作動量とクラッチトルクとの対応関係において目標クラッチトルクに制御したクラッチアクチュエータ作動量に対応するクラッチトルクの値を推定クラッチトルクに置き換えて補正する。
【0013】
このように変速中に変速作動が完了しクラッチが係合状態となっている場合において、エンジン回転数と入力軸回転数との差の絶対値が所定値以上に大きい場合には、エンジントルクがクラッチに作用した状態で、そのときの推定クラッチトルクに基づいて補正後のクラッチトルクとするための学習を充分行なうことができる。
【0014】
請求項2に係る発明によれば、請求項1において、推定クラッチトルク演算手段によって演算された推定クラッチトルクを、エンジン回転数および入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有している。エンジン回転数による補正については、エンジン回転数に比例しクラッチの押し付け荷重によって押し付け部分に発生するクラッチトルクを変動させる遠心力分を補正するものである。また入力軸回転数による補正については、入力軸回転数に比例し入力軸自体の回転によって発生するクラッチトルクを変動させる変動分を補正するものである。これによって推定クラッチトルクの演算精度はさらに向上し、補正精度が向上する。
【0015】
請求項3に係る発明によれば、請求項1または2において、回転差変化量検出手段が差の絶対値の変化割合が所定値以下であることを検出することによって、エンジントルクがクラッチに作用した係合状態において徐々に差の絶対値が減少していくことを検出できる。このように変化割合が所定値以下であるとき、すなわち徐々に検出した差の絶対値が減少していく場合に学習を行なうようにするので、発進時に学習を行なう場合と同様に安定して学習でき精度のよいデータを取得できる。
【0016】
請求項4に係る発明によれば、請求項1乃至3のいずれか1項において、クラッチはエンジンのアウトプットシャフトと自動変速装置の入力軸とを係脱可能に連結し、モータは、自動変速装置の出力軸に回転連結されるとともに駆動輪に回転連結されている、いわゆるパラレル方式のハイブリッド車両である。このように構成されるハイブリッド車両ではモータジェネレータのみの駆動力によって発進することもできるので、そのときには発進時におけるクラッチアクチュエータ作動量の学習の機会が少なくなる。しかし、本発明では所定の条件における変速時において、クラッチアクチュエータ作動量の学習の機会を増やすことができるのでクラッチトルク−作動量記憶手段に記憶されたクラッチアクチュエータ作動量とクラッチトルクとの対応関係を適宜補正しながら安定した変速制御を実施することができる。
【図面の簡単な説明】
【0017】
【図1】本発明に係る変速制御装置を含むハイブリッド車両の概略構成図である。
【図2】図1のエンジン、自動変速機、及びクラッチ装置の概略構成図である。
【図3】クラッチトルクとクラッチアクチュエータ作動量との関係を示すクラッチトルクマップである。
【図4】エンジン出力制御作動量一定時におけるエンジントルク−エンジン回転数グラフである。
【図5】変速線の一例である。
【図6】本実施形態に係る推定トルク学習時におけるエンジン回転数Neと入力軸回転数Ni等の制御状態を示すタイムチャート図である。
【図7】本実施形態に係るフローチャートである。
【図8】別の実施例(減速時)に係る推定トルクの学習状態におけるエンジン回転数Neと入力軸回転数Ni等の制御状態を示すタイムチャート図である。
【発明を実施するための形態】
【0018】
次に、本発明を実施するための形態について図面を参照して詳細に説明する。図1は、本発明を適用可能なハイブリッド車両の構成を示したブロック図である。図1に示すハイブリッド車両1は、エンジン11と、バッテリ19に蓄積された電気で駆動されるモータジェネレータ(本発明のモータに相当、以下、「MG」と称す)12とを備え、該2種類の原動機が並列に配置されて搭載され、各々の原動機によって車輪を駆動できるような構成となっている。
【0019】
また、ハイブリッド車両1は、図1、図2に示すエンジン11の出力軸31(本発明のアウトプットシャフトに相当)に回転連結され、出力軸31の回転数を複数の変速比の変速段によって変速する自動変速機13(本発明の自動変速装置に相当)と、エンジン11の出力軸31と自動変速機13の入力軸34との係脱を制御するとともに出力軸31から入力軸34に伝達されるクラッチトルクを後述する目標クラッチトルクTrに制御するクラッチ装置30(本発明のクラッチに相当)と、図1に示す差動装置(ディファレンシャル)14と、駆動軸15a、15bと、駆動輪16a、16bと、を備えている。
【0020】
さらに、ハイブリッド車両1は、車両全体の制御を掌るHV/ECU(Hybrid Vehicle Electronic Control Unit)21と、MG12に駆動又は回生を指令するMG/ECU22と、MG12に電力を供給するインバータ27と、エンジン11の停止、及び燃焼を制御するENG/ECU23と、自動変速機13に組み込まれたクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26と接続され、各アクチュエータ17、18、26を制御し最適な変速を行なわせしめるAMT/ECU24と、インバータ27と接続されたバッテリ19の充電状態を管理するバッテリECU25と、を備えている。MG/ECU22、ENG/ECU23、AMT/ECU24、及びバッテリECU25はHV/ECU21とCAN接続され、それぞれはHV/ECU21によって管理、及び制御されている。
【0021】
各ECU21、22、23、24、25は、それぞれ制御部(図略)を備えており、演算を行なうCPU(制御部)と、ROM、RAM及びバックアップ電源なしでデータの保持が可能なEEPROM等とを備えて構成される(いずれも図略)。制御部は、CPUによってROMに記憶された各種制御プログラムやマップに基づいて演算処理を実行する。ROMは、各種制御プログラムや、これらのプログラムを実行する際に参照されるマップ等が記憶されたメモリである。RAMは制御部での演算結果や外部から入力されるデータ等を一時的に記憶するメモリに相当し、EEPROMは記憶されたデータ等を保存する不揮発性のメモリからなる。制御部のCPU、ROM、RAM、及びEEPROMは、夫々バス(図略)を介して互いに接続されるとともに、入力インターフェース、及び出力インターフェース(いずれも図略)と接続される。
【0022】
このように構成された本実施形態に係るハイブリッド車両1は、発進時にMG12のみによって発進し、MG12の駆動力が不足した場合にエンジン11をエンジン11に設けられた点火用のイグニッションスイッチ73によって始動させる。これによってMG12とエンジン11との両駆動力、若しくはエンジン11のみの駆動力によっても走行することができる。
【0023】
エンジン11、自動変速機13、入力軸回転数センサ36(後述する入力軸回転数検出手段37を構成する)、エンジン回転数センサ72(後述するエンジン回転数検出手段54を構成する)、クラッチ装置30、MG12(モータジェネレータ)、HV/ECU21、ENG/ECU23、及びAMT/ECU24等によって本発明に係る変速制御装置2が構成される。
【0024】
またAMT/ECU24が有するクラッチトルク−作動量記憶手段51、クラッチ制御手段52、対応関係補正手段53、エンジン回転数検出手段54、入力軸回転数検出手段37、エンジン出力制御手段49、エンジン出力制御作動量検出手段55、エンジントルク検出手段56、推定クラッチトルク演算手段39、回転差変化量検出手段48、及び推定クラッチトルク補正手段57によって変速制御装置2が制御される。
【0025】
さらに、図1、図2に示すようにHV/ECU21には、イグニッションスイッチ73、エンジン回転数センサ72、及びアクセル開度センサ(図略)等の各種センサが接続されている。AMT/ECU24には、入力軸回転数センサ36、ストロークセンサ67、クラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26等が接続されている。そしてHV/ECU21は、上記各種センサの検出信号を取り込み、車両状態(アクセルのオン・オフ状態、イグニッションスイッチ73のオン・オフ状態、エンジン回転数Ne等)を検知し、AMT/ECU24は、ストロークセンサ67からの信号によってクラッチアクチュエータ17のアクチュエータ作動量Saを検知し、入力軸回転数センサ36からの信号によって入力軸回転数Niを検出する。そして検知した車両状態及び運転者の意思に基づいて、HV/ECU21がAMT/ECU24を制御し、AMT/ECU24がクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26を駆動して自動変速機13の変速段の変速作動を行なう。
【0026】
まず、図3、及び図4に基づき変速制御装置2を構成するエンジン11、自動変速機13、クラッチ装置30、MG12、HV/ECU21、ENG/ECU23、及びAMT/ECU24等について詳細に説明する。ただし、MG12は、ハイブリッド車両で一般的に使用される3相電気モータであるので詳細な説明は省略する。
【0027】
図2に示すように、エンジン11の出力軸31には、クラッチ装置30が組み付けられ、クラッチ装置30を介して出力軸31と自動変速機13の入力軸34とが接続されている。クラッチ装置30は乾式・単板式の摩擦クラッチである。
【0028】
エンジン11は、吸入空気量を調節し、エンジン11の出力を制御するためのエンジン出力制御手段49を構成するスロットルバルブ70と、エンジン出力制御作動量であるスロットルバルブ70の開度(スロットル開度)を検出するためのスロットルセンサ68(本発明のエンジン出力制御作動量検出手段55を構成する)と、スロットルバルブ70を開閉駆動するスロットル用アクチュエータ69(本発明のエンジン出力制御手段49を構成する)とを備えている。スロットルセンサ68、及びスロットル用アクチュエータ69はENG/ECU23に接続されている。そしてHV/ECU21からの指令に基づきENG/ECU23がスロットル用アクチュエータ69を制御し、スロットルセンサ68からのスロットル開度信号がENG/ECU23に送信される。
【0029】
なお、図2においてはスロットル用アクチュエータ69がスロットルバルブ70を開閉させるように表してはいない。しかし、図2は模式的に描いたものであり、実際にはスロットル用アクチュエータ69がスロットルバルブ70の回転軸であるスロットルシャフト71を軸回りに回動させるよう構成されている。
【0030】
図1に示すように、エンジン11の出力軸31近傍には出力軸31の回転数を検出する非接触式のエンジン回転数センサ72が設けられている。また図略のアクセルペダルにはアクセルペダルの踏み込み量を検出するアクセル開度センサが設けられている。そして運転者がアクセルペダル(図略)を踏み込んだり戻したりすると、アクセル開度センサからアクセル開度信号がHV/ECU21に送信され、運転者の走行に対する意思(加減速、または、定常走行等の要求)を伝達する。HV/ECU21はエンジン11が作動状態である場合においては、送信されたアクセル開度信号の値に応じてENG/ECU23に指令値を送信する。ENG/ECU23は、指令値に基づきスロットル用アクチュエータ69を作動させてスロットルバルブ70を開閉弁させ、エンジン回転数センサ72によって出力軸31の回転数を監視しながらエンジン11の出力及び、エンジン回転数Neを制御する。
【0031】
なお、本実施形態においては、エンジン回転数Neは、運転者が踏み込むアクセルペダルの踏み込み量のみによって制御されるものではなく、アクセルペダルの踏み込み量とは関係なく、HV/ECU21を介したAMT/ECU24からの要求によってもスロットル用アクチュエータ69を作動させて制御可能となっている。
【0032】
図2に示すように、クラッチ装置30(本発明のクラッチに相当)は、エンジン11の出力軸31に固定されたフライホイール41、クラッチフェージング43が外周両面に貼付され固着されるとともに、自動変速機13の入力軸34とスプライン連結され一体的に回転するクラッチディスク42、フライホイール41に固定されるクラッチアッセンブリであるプレッシャプレート44、ダイヤフラムスプリング45、クラッチカバー46、及び油圧ダイレクトシリンダ(コンセントリックスレーブシリンダ)47等を含んで構成される。
【0033】
そしてクラッチ装置30は、油圧ダイレクトシリンダ47、ダイヤフラムスプリング45、及びプレッシャプレート44を介し、フライホイール41に対するクラッチディスク42の圧着荷重を変化させる。これによってフライホイール41及びクラッチディスク42間の回転伝達量を増減可能とし、クラッチトルクTcを目標クラッチトルクTrに制御可能としている。
【0034】
クラッチアクチュエータ17は、図2に示すように、直流電動モータ61、減速機62、出力ホイール63、出力ロッド64、マスターシリンダ65、及びアシストスプリング(助勢手段)66等を備えて構成されている。
【0035】
減速機62は、直流電動モータ61の出力軸上に形成されたウォームギヤよりなり、出力ホイール63は減速機62を介して直流電動モ−タ61の駆動によって回動される。そして出力ホイール63の回動によって、出力ホイール63にピポットピン49によって連結された出力ロッド64が前方(図2において左方)又は後方(図2において右方)に移動(ストローク、進退)されてマスターシリンダ65を作動させる。そしてマスターシリンダ65の作動によって発生した油圧を、クラッチ装置30を構成する油圧ダイレクトシリンダ47に付与する。アシストスプリング66は出力ホイール63に連結されており、クラッチ装置30を脱離する(クラッチを切る)方向(図2において反時計回り)にアシスト力を発生させ、直流電動モータ61の出力(トルク)がより小さい力で出力ホイール63を回動可能なように構成されている。
【0036】
例えば、図2に示すクラッチアクチュエータ17が制御されていない初期の状態では、出力ロッド64、油圧ダイレクトシリンダ47、クラッチ装置30のバネ反力(プレッシャプレート44をフライホイール41方向に付勢する力)を発生するダイヤフラムスプリング45を介して、プレッシャプレート44に圧着荷重が生じている。これによってクラッチディスク42にはフライホイール41に向かって圧着荷重が加えられフライホイール41と完全係合してエンジン11側からの回転が完全に伝達可能な状態となっている。
【0037】
一方、クラッチアクチュエータ17が制御され、出力ロッド64の図2における左方への移動によって油圧ダイレクトシリンダ47が作動されると、ダイヤフラムスプリング45の内径部が変形され、これによってプレッシャプレート44を押圧するダイヤフラムスプリング45の外径部の力が弱くなり、フライホイール41に対するクラッチディスク42の圧着荷重が低減されるようになっている。そしてフライホイール41とクラッチディスク42との間には、出力ロッド64のクラッチアクチュエータ作動量Saの大きさに応じ、滑り(スリップ)が発生して、係合状態である、いわゆる半クラッチ状態となる。そして、エンジントルクTeが自動変速機13の入力軸34に前記係合状態に応じて伝達される。
【0038】
図3において、実線グラフは初期状態(車両出荷状態)におけるクラッチアクチュエータ作動量Saと、該クラッチアクチュエータ作動量Saだけ作動させた時に自動変速機13の入力軸34に伝達されるエンジントルク(=クラッチトルクTc)との対応関係を示したクラッチトルクマップであり、AMT/ECU24のROMに記憶されている(クラッチトルク−作動量記憶手段51に相当)。図3では、表の右端がフライホイール41とクラッチディスク42との間が完全に係合している完全係合状態を示し、左端がフライホイール41とクラッチディスク42との間が切断されている開放状態を示している。そして完全係合状態若しくは開放状態のいずれか一方の点を制御の原点としている。
【0039】
前述した目標クラッチトルクTrを得るために、AMT/ECU24はクラッチアクチュエータ17の出力ロッド64の軸方向の作動量を、図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップ(実線グラフ)に基づく目標クラッチトルクTrに対応するクラッチアクチュエータ作動量Saaだけ作動させる。
【0040】
出力ロッド64の作動量は、出力ロッド64の近傍に設けられた非接触式のストロークセンサ67によって検出される。ストロークセンサ67はホールICによる回転角センサであり、AMT/ECU24と接続され、ストロークセンサ67によって検出されたクラッチアクチュエータ作動量SaaのデータがAMT/ECU24に送信される。
【0041】
このとき出力ロッド64がクラッチアクチュエータ作動量Saaだけ作動されて目標クラッチトルクTrになるよう制御された際の実際のクラッチトルクTcの値は、目標クラッチトルクTrからずれている場合がある。これは図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップが車両の出荷時においてクラッチディスクのクッショニング特性などから静的に求められたものであるためである。つまりクラッチトルクTc−クラッチアクチュエータ作動量Sa特性は、時間の経過とともにクラッチフェーシング43の摩耗、フライホイール41やプレッシャプレート44の発熱による摩擦面のμ(摩擦係数)の変化、及び経年劣化等によって出荷時状態から変動する可能性がある。そこで本発明においては、エンジン回転数Neと入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上となった場合において、クラッチトルクTc−クラッチアクチュエータ作動量マップSaの学習を行なうようにした。
【0042】
具体的には変速時に、一の変速比から他の変速比への変速が完了し、クラッチ装置30が係合状態において、差の絶対値|Ne−Ni|が所定値以上の場合に学習を行なう。そしてクラッチ装置30が図3に示すマップに基づいて、クラッチトルクTcが目標クラッチトルクTrとなるように制御しているときに、エンジントルク検出手段56が、そのときにエンジン11を制御している所定のスロットル開度(エンジン出力制御作動量)におけるエンジン回転数Neaに基づいてエンジントルクTeaを求める(図4参照)。そして求めたエンジントルクTeaから後述する推定クラッチトルクTesを推定クラッチトルク演算手段39によって演算し、演算した推定クラッチトルクTesと、目標クラッチトルクTrを得るために作動させた出力ロッド64のクラッチアクチュエータ作動量Saaとを対応させて学習し(図3中B点)、クラッチアクチュエータ作動量Saaに対応するクラッチトルクTcとして推定クラッチトルクTesを置き換える。そして図3の実線グラフをB点を通過する2点鎖線グラフに書き換えて補正する。なお、2点鎖線グラフはB点を通る特性として、予め実験によって導出され準備されているものである。そして、次回目標クラッチトルクTrに制御する際には、このようにして求められ補正された2点鎖線グラフによって制御する。そのため2点鎖線グラフ上において目標クラッチトルクTrとなる点Cに対応するクラッチアクチュエータ作動量Sacだけ出力ロッド64を作動させることによって、より精度よく目標クラッチトルクTrを得ることができる。
【0043】
なお、上記においては、学習条件として差の絶対値|Ne−Ni|が所定値以上であるとした。これは、変速制御装置2が学習を行なうのに所定の継続時間が必要であり、その継続時間が確保できるか否かを、エンジン回転数Neと自動変速機13の入力軸回転数Niとの回転数差に置き換えて判定するようにしたものである。
【0044】
つまりエンジン回転数Neと自動変速機13の入力軸回転数Niとが所定値以上の回転数差を有する場合には、半クラッチ状態(係合状態)でエンジントルクTeがクラッチ装置30に作用している。これにより半クラッチ状態(係合状態)において、そのときの推定クラッチトルクTesを補正後のクラッチトルクとして学習することができる。そこで、エンジントルクが所定値以上であって、学習のために必要な半クラッチ状態(係合状態)の継続時間を確保するために、エンジン回転数Neと入力軸回転数Niとの回転数差に置き換え、学習するために必要な継続時間が確保できるか否かを判定するようにした。よって、差の絶対値|Ne−Ni|の所定値の大きさは、学習するために十分な時間を確保することができる大きさにすればよく、実施者によって実験等に基づき適宜設定すればよい。
【0045】
次に自動変速機13について説明する。自動変速機13は既存のマニュアルトランスミッションに対し、クラッチアクチュエータ17の作動によって係脱を制御されるクラッチ装置30を取り付け、変速を自動化した、いわゆるAMT(オートメイテッドマニュアルトランスミッション)である。自動変速機13は入力軸34及び出力軸35を備えるとともに、複数段の変速比の変速ギヤ列を備えており、本実施形態においては例えば前進5段・後進1段の平行軸歯車式変速機である。前進1〜5速段は1速段から5速段に向かってギヤの変速比が順次小さくなるように構成されており、例えば、1速段〜3速段では1を超える変速ギヤ比であり、4速段では変速ギヤ比1となっており、5速段では1を下回る変速ギヤ比になっている。
【0046】
自動変速機13の入力軸34は、クラッチ装置30側からの動力(クラッチトルクTc)が伝達可能に連結され、出力軸35は、車両の駆動軸15a、15bに差動装置(ディファレンシャル)14を介して動力が伝達可能に連結されている(図1参照)。これによりエンジン11から伝達されたクラッチトルクTcは、変速ギヤ列で増減され、差動装置(ディファレンシャル)14を経由して駆動軸15a、15b、及び駆動輪16a、16bに伝達され車両を駆動させる。また、MG12の出力も同様に差動装置(ディファレンシャル)14を経由して単独で、若しくはエンジン11と共に車両の駆動が可能となっている。
【0047】
自動変速機13には、AMT/ECU24と接続され、AMT/ECU24によって制御される変速段の切り替えを操作するための変速用アクチュエータ群(前述のクラッチアクチュエータ17、シフトアクチュエータ18、及びセレクトアクチュエータ26)が備えられている。
【0048】
AMT/ECU24は各変速段(変速比)毎に設定された変速線(図5参照)をROMに記憶して有している。図5に示す変速線Aは、代表として例えば1速段(一の変速比)から2速段(他の変速比)への変速線である増速側の1速段変速線を示している。変速線は車両の変速時に利用されるマップデータであり、予め選択した変速段選択パラメータ(本実施形態においてはエンジン回転数とアクセルペダル開度)を各軸にとり、一の変速比から他の変速比への変速の要否を判断するための基準線である。
【0049】
図示しないが、変速線A上には各アクセルペダル開度毎に変速点が存在している。そして例えば運転者が1速段で走行中にアクセルペダル(図略)を例えば全踏み込み量の75%だけ踏み込みエンジン回転数が増加し変速線A上の点であるPrpmと交差すると、AMT/ECU24は、変速制御を開始する。図6に示すように、変速制御が開始されるとENG/ECU21は、スロットル用アクチュエータ69を駆動させてスロットルバルブ70を閉弁側に作動開始させ、エンジントルクTeをHV/ECU21の指令値に基づいて減少させる(図6中、制御項目のエンジントルクTeの欄参照)。略同時にAMT/ECU24は、クラッチアクチュエータ17の作動を開始し、クラッチアクチュエータ17の出力ロッド64を図2において左方に移動させてクラッチ装置30のフライホイール41とクラッチディスク42とを脱離させ、やがて係合を切断する(図6中、制御項目のクラッチトルクTcの欄参照)。この状態において、スロットルバルブ70はいわゆる全閉状態に閉弁されエンジントルクTeは最小となる。
【0050】
AMT/ECU24は上記においてスロットルバルブ70が閉弁されクラッチ装置30の係合が切断された状態でシフトアクチュエータ18、及びセレクトアクチュエータ26を適宜駆動し自動変速機13のギヤ列(変速段)を例えば1速段→2速段に切替える(図6中、制御項目の変速制御の欄参照)。そしてギヤ列(変速段)の切替え終了後、ENG/ECU23は、スロットル用アクチュエータ69を駆動しスロットルバルブ70をHV/ECU21を介したAMT/ECU24からの指令値に合わせて開弁させエンジントルクTeを増加させていく。
【0051】
略同時に、AMT/ECU24は、クラッチ装置30を再度係合させていくためにクラッチアクチュエータ17を駆動してクラッチアクチュエータ作動量Saをクラッチ装置30の係合方向に変化させる。そして、クラッチトルクTcがAMT/ECU24から指令された目標クラッチトルクTrとなるように図3の実線グラフのマップに基づいてクラッチアクチュエータ作動量Saが目標クラッチトルクTrに対応する作動量Saaとなるよう制御する。このようにしてエンジン回転数Neと、変速作動後の自動変速機13の入力軸回転数Niとが良好に適合できるようエンジントルクTeをクラッチ装置30に作用させて半クラッチ状態(係合状態)とし、最終的にフライホイール41とクラッチディスク42とを完全係合させ2速段への変速作動を完了する。なお、上記の説明において、シフトアクチュエータ18、及びセレクトアクチュエータ26の駆動方法については公知であるので詳細な説明は省略する(特開2004−176894参照)。
【0052】
なお、上記において変速制御開始後のエンジントルクTeの減少中、及びクラッチ装置30の係合が切断された状態においては、不足する駆動力を補うためにMG12を駆動させMG12の駆動トルクをディファレンシャル14を介して駆動軸15a、15b、及び駆動輪16a、16bに付与するよう制御してもよい。これによって運転者に失速感を感じさせないようにすることができる。
【0053】
前述したように、HV/ECU21は、ハイブリッド車両1全体を統括制御し、AMT/ECU24は、変速制御装置2を構成するクラッチトルク−作動量記憶手段51、クラッチ制御手段52、対応関係補正手段53、エンジン回転数検出手段54、入力軸回転数検出手段37、回転差変化量検出手段48、エンジン出力制御手段49、エンジン出力制御作動量検出手段55、エンジントルク検出手段56、推定クラッチトルク演算手段39、及び推定クラッチトルク補正手段57を備えている(図1参照)。また、対応関係補正手段53は、変速作動完了検出手段58と、回転差判定手段59と、クラッチトルク−作動量補正手段60と、を有している。AMT/ECU24は、これらの各手段によってクラッチ装置30のクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を変速段の変速中に学習し補正する。
【0054】
クラッチトルク−作動量記憶手段51は、図3に示す、クラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップ(実線グラフ)をROMに記憶しているとともに、補正されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を記憶する。
【0055】
クラッチ制御手段52は車両が要求する所要の目標クラッチトルクTrを得るためにクラッチアクチュエータ17が制御すべきクラッチアクチュエータ作動量Saaをクラッチトルク−作動量記憶手段51から求める。そして求めたクラッチアクチュエータ作動量SaaデータをAMT/ECU24に送信し、AMT/ECU24によってクラッチアクチュエータ17を駆動させ出力ロッド64を対応するクラッチアクチュエータ作動量Saaだけ作動させ、クラッチトルクTcが目標クラッチトルクTrになるよう制御する。
エンジン回転数検出手段54は、エンジン11の出力軸31に設けられたエンジン回転数センサ72によってエンジン回転数Neを検出する。また、エンジン出力制御作動量検出手段55はスロットルセンサ68を備え、エンジントルクTeを制御するスロットルバルブ70(エンジン出力制御手段49を構成する)のスロットル開度(エンジン出力制御作動量)をスロットルセンサ68によって検出する。
【0056】
エンジントルク検出手段56は、事前に準備され、AMT/ECU24のROMに記憶されているエンジン出力制御作動量の各作動量である各スロットル開度におけるエンジン回転数NeとエンジントルクTeとの関係(図4参照)に基づいて、エンジン出力制御作動量検出手段55が検出したスロットル開度とエンジン回転数検出手段54が検出したエンジン回転数NeとからエンジントルクTeを検出する。
【0057】
入力軸回転数検出手段37は、自動変速機13の入力軸34近傍に設けられた入力軸回転数センサ36によって入力軸34の入力軸回転数Niを検出する。入力軸回転数センサ36は、非接触式のセンサであり、AMT/ECU24に接続され、検出された回転数信号はAMT/ECU24に送信される。
【0058】
回転差変化量検出手段48は、後に詳述する回転差判定手段59によって検出された所定値以上であったエンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|の変化量、すなわち微分値を演算し、該微分値が所定値以下であるか否かを判定する。変化量(微分値)が所定値以下であれば、エンジントルクがクラッチに作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していくことを示している。このように変化割合が所定値以下であるとき、すなわち検出した差の絶対値が徐々に減少していく場合に学習を行なうようにすれば、係合状態の継続時間が確保され発進時に学習を行なう場合と同様に安定して精度のよいデータを取得できる。なお、変化量の所定値は任意に設定すればよい。
【0059】
推定クラッチトルク演算手段39は、クラッチ制御手段52がクラッチアクチュエータ17を目標クラッチトルクTrに対応するクラッチアクチュエータ作動量Saa作動させたとき、エンジントルク検出手段56がスロットル開度(エンジン出力制御作動量)と該スロットル開度のときのエンジン回転数Neaとから演算したエンジントルクTea(図4参照)からエンジン回転数Neaの加速度にエンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクTesを演算する。
【0060】
推定クラッチトルクTesは、特開2005−214331号公報に記載された手法と同様に、下記式(1)によって求められる。下記式(1)はクラッチ装置30のクラッチアクチュエータ作動量Saを図3に示す開放側原点から完全係合状態に向かってクラッチアクチュエータ作動量Saaまで変化(作動)させ所定の目標クラッチトルクTrとなるよう制御した場合に実際に出力されるクラッチトルクTcを推定クラッチトルクTesとして演算するものである。
(数1)
Tes=Te−J・(dNe/dt)・・・(1)
上式(1)において、Tesは、推定クラッチトルク、Teは、エンジントルク、Jはエンジンに固有の設計値であるエンジンイナーシャ(回転慣性モーメント)、Neは、エンジン回転数、dNe/dtはエンジン回転数加速度をそれぞれ表すものとする。
【0061】
学習条件として、エンジン回転が安定状態に到った場合に上記式(1)の演算を行って、推定クラッチトルクTesを定めることができる。例えば、推定クラッチトルク演算手段39は、上式(1)の右辺第2項のエンジン回転数加速度dNe/dtを監視し、dNe/dtが所定の範囲に入った場合に、学習条件が成立したと判定し、推定クラッチトルクTesの演算を行うことができる。これによって推定クラッチトルクTesの演算結果が安定するとともに、より精度よく演算結果を得ることができる。なお、学習条件である所定の範囲はどのように設定してもよい。
【0062】
推定クラッチトルク補正手段57は、推定クラッチトルク演算手段によって演算された推定クラッチトルクTesを、エンジン回転数Neおよび入力軸回転数Niの少なくとも一方に応じて補正する。なお、本実施形態においてはエンジン回転数Ne、及び入力軸回転数Niの両方について補正を行なうものとする。
【0063】
まず、エンジン回転数Neに応じて推定クラッチトルクTesの値を補正する場合について説明する。上述したように本実施形態におけるクラッチ装置30の係合状態においては、バネ反力を発生するダイヤフラムスプリング45が梃子のように作用点をプレッシャプレート44の外周部に押し当ててプレッシャプレート44に圧着荷重を生じさせている。これにより、プレッシャプレート44には錘が付加されたような作用が生じエンジン回転数に比例して該錘の遠心力が大きくなりエンジン11からの伝達トルクが変化することがわかった。このため上記式(1)に基づき演算された推定クラッチトルクTesの演算値に対し、発生した遠心力分だけ補正するものとする。このようにして補正後推定クラッチトルクTesengを演算し、推定クラッチトルクTesをより正確な値に近づける。なお、補正値はクラッチ装置の構造等によってそれぞれ異なるため実験によって求めた値を適用する。
【0064】
次に、自動変速機13の入力軸34の入力軸回転数Niに応じて推定クラッチトルクTesを補正する場合について説明する。発明者は入力軸回転数Niの大きさに比例して推定クラッチトルクTesの値が変動することを実験によって見いだした。このため、入力軸回転数Niの大きさに応じてクラッチトルクTcを変動させる変動分を実験によって求め、上記においてエンジン回転数Neに応じて補正された補正後推定クラッチトルクTesengに対し前記求めた変動分を補正し、補正後推定クラッチトルクTesnsを演算する。なお、本実施形態においてはエンジン回転数による補正を入力軸回転数による補正よりも先に実施しているが、入力軸回転数による補正を先に実施してもよい。
【0065】
対応関係補正手段53は、クラッチアクチュエータ17を作動させたとき、クラッチ装置30によって伝達されたクラッチトルクTcとクラッチアクチュエータ作動量Saとの関係を学習し、クラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を補正するものである。
【0066】
対応関係補正手段53は、前述したように変速作動完了検出手段58と、回転差判定手段59と、クラッチトルク−作動量補正手段60とを有している。
変速作動完了検出手段58は、自動変速機13の変速時において自動変速装置の変速作動、すなわち変速段の切替えが完了したことをAMT/ECU24からの信号によって検出する。
【0067】
回転差判定手段59は、自動変速機13の変速時に、クラッチ装置30が係合状態において、エンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることを判定する。なお、本実施形態において自動変速機13の変速時とは、所定のアクセルペダル開度におけるエンジン回転数Neが複数段の変速比毎に準備された複数の変速線のいずれか一つを超えて変速開始となったときから、自動変速機13の変速段の切替え(変速作動)が完了し、クラッチ装置30が係合状態を経て、再び完全係合状態に至るまでの間をいう(図6中、変速中フラグの項目参照)。
【0068】
クラッチトルク−作動量補正手段60は、変速時に変速段の切替え(変速作動)が完了し、且つ差の絶対値|Ne−Ni|が所定値以上であるときに、推定クラッチトルク補正手段57によって演算された補正後推定クラッチトルクTesnsが所定値以上であるか否かを判定する。そして補正後推定クラッチトルクTesnsが所定値以上であれば、図3に示すクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において、目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクTcの値を補正後推定クラッチトルクTesnsに置き換えRAMに記憶し、図3のマップを補正する。
【0069】
なお、補正後推定クラッチトルクTesnsの大きさを判定する所定値は、補正後推定クラッチトルクTesnsに対応して求めるクラッチアクチュエータ作動量Sacのばらつきを抑制するためのものである。つまり、補正後推定クラッチトルクTesnsの値が低すぎるときには、図3に示すクラッチトルクTc−クラッチアクチュエータ作動量Saマップにおいて、マップの傾きが小さな領域を使用することになる(図3において左方)。このため、補正後推定クラッチトルクTesnsのばらつきによって補正後推定クラッチトルクTesnsに対応するクラッチアクチュエータ作動量Sacの値のばらつきが大きくなる虞がある。このため、補正後推定クラッチトルクTesnsの値を所定値以上とし、マップの傾きが大きな領域で補正後推定クラッチトルクTesnsに対するクラッチアクチュエータ作動量Sacを学習するようにし、補正後推定クラッチトルクTesnsのばらつきに対応するクラッチアクチュエータ作動量Sacのばらつきを抑制するようにした。所定値は実施者によって任意に設定すればよい。
【0070】
次に本発明に係る変速制御装置2の制御について図7のフローチャート、及び図6の制御状態図に基づき説明する。なお、本実施形態においては、変速作動の一例として変速比の差が比較的大きく、変速時において大きな回転数差の絶対値|Ne−Ni|を得やすい変速段である低速段でのアップシフト変速(1速段→2速段)について説明する。また、回転数差の絶対値|Ne−Ni|の所定値を例えば2000rpmとする。
【0071】
ハイブリッド車両1が起動されると、フローチャートがスタートする(ステップS10)。前述したように本実施形態においてはハイブリッド車両1の発進時には、MG12によって発進する。これにより発進時、エンジン11は始動されておらずクラッチ装置30の係合は切断されている。そして、その後、例えばMG12を駆動するバッテリの充電量が不足していたり、運転者がアクセルペダルを踏み込み加速を要求したりすることによってHV/ECU21がENG/ECU23に指令信号を送信し、イグニッションスイッチ73をONさせ、エンジン11が始動される。
【0072】
ステップS11では、カウンタ(count)と、補正後推定クラッチトルクTesnsのデータ番号を示す添え字(i)を初期化する。
ステップS12では、エンジン回転数Neが複数の変速線のいずれか一つ(本実施形態においては1速段増速側変速線)を超え変速中(変速時)となったか否かを判定する。そして変速中であることを確認するとステップS13に移動し、変速中でなければ学習を行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0073】
ステップS13(対応関係補正手段53、変速作動完了検出手段58)では一の変速比から他の変速比への切替え動作である変速作動が完了したか否かをAMT/ECU24からの信号によって確認する。そして変速作動の完了を確認するとステップS14に移動し、完了が確認されなければステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0074】
ステップS14(対応関係補正手段53、回転差判定手段59)では、クラッチ装置30の係合状態において、まずエンジン回転数検出手段54により検出されたエンジン回転数Neと、入力軸回転数検出手段37によって検出された自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|を演算する。
【0075】
このとき例えば運転者が加速を要求してアクセルを踏込み、自動変速機13が1速段(一の変速比)から2速段(他の変速比(変速比は1速段の変速比の1/2とする))にアップシフトして変速した場合、2速段に変速したことによって、入力軸回転数Ni2は1速段時の入力軸回転数Ni1の略半分となる。 つまりハイブリッド車両1が、1速段で入力軸回転数Ni1が例えば6000rpm(車速45km/h)にて走行している場合には、2速段にアップシフトすることによって入力軸回転数Ni2は略3000rpm(車速略45km/h)に減少する。これにより、1速段から2速段への変速作動完了後でクラッチ装置30の係合状態開始時においては、入力軸回転数Ni2とエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は略3000rpmとなる。そして回転数差の絶対値|Ne−Ni|が所定値(本実施形態においては例えば2000rpmとする)以上であるか否かを判定する。上記条件のように絶対値|Ne−Ni|が3000rpmであれば所定値(2000rpm)以上であるのでステップS15に移動する。また、所定値以下であれば学習を適切に行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0076】
ステップS15(回転差変化量検出手段48)では、エンジン回転数Neと、自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|の変化量、すなわち微分値を演算し、該微分値が所定値以下であるか否かを判定する。変化量(微分値)が所定値以下であれば、制御を続行するためステップS16に移動し推定クラッチトルクTesを演算する。また、所定値以下であれば学習を適切に行なうことができないので、ステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0077】
ステップS16(推定クラッチトルク演算手段39)では、上述のとおりに式(1)に基づき、そのときの実際のエンジン回転数Neaとスロットル開度とに基づいて求めた、実際のエンジントルクTeaから推定クラッチトルクTesを演算する。
【0078】
ステップS17(推定クラッチトルク補正手段57)では、ステップS16で演算された推定クラッチトルクTesを上述したように、そのときのエンジン回転数Neaの大きさに応じて実験値に基づき補正し、補正後推定クラッチトルクTesengを演算する。
【0079】
ステップS18(推定クラッチトルク補正手段57)では、ステップS17で求めた補正後推定クラッチトルクTesengを、上述したようにそのときの入力軸回転数Niaの大きさに応じて実験値に基づき補正し、補正後推定クラッチトルクTesns(di)を演算する。なお、ここでdiはデータNOを示す。
【0080】
ステップS19(対応関係補正手段53)では、ステップS18において補正した補正後推定クラッチトルクTesns(di)が所定値以上であるか否かを判定する。そして所定値以上であればステップS20に移動し所定値以下であればステップS25に移動してプログラムを終了し、ステップS10にもどる。
【0081】
ステップS20では、カウンタ(count)、及び補正後推定クラッチトルクTesns(di)のデータ番号を示す添え字(i)に1を加算する。
【0082】
ステップS21では、補正後推定クラッチトルクTesns(di)をROMに記憶する。
【0083】
ステップS22では、補正後推定クラッチトルクTesns(di)のデータ取得回数に一致するカウンタ(count)が3であるかを確認し、3であればステップS23に移動し、3でなければステップS12に移動し、再びステップS12〜ステップS21の制御を繰り返す。なお、本実施形態においてはカウンタの値を3としたが、これに限らず2でもよいし、4以上でもよい。
【0084】
ステップS23では取得し記憶された補正後推定クラッチトルクTesns(d1)〜(d3)の値の差(幅)が所定値以下であるか確認する。所定値以下であれば、エンジントルクTeがクラッチ装置30に作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していく状態で安定してデータが取得できたといえ、これによって補正後推定クラッチトルクTesnsのデータの信頼性が確認できる。そして補正を行なうためにステップS24に移動する。また所定の範囲を越えていれば、何らかの原因で差の絶対値|Ne−Ni|が大きく変化した可能性があるので取得したデータを使用せずステップS25に移動してプログラムを終了し、ステップS10にもどる。なお、所定の範囲は任意に設定すればよい。
【0085】
ステップS24(対応関係補正手段53、クラッチトルク−作動量補正手段60)では、クラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において、目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクTcの値を補正後推定クラッチトルクTesnsに置き換えRAMに記憶し、図3のマップを補正する。なお、このとき置き換える補正後推定クラッチトルクTesnsは補正後推定クラッチトルクTesns(d1)〜(d3)までの平均値をとってもよいし、中央の値をとってもよい。また、いずれか1点を選択してもよい。そして、次回からの制御においては補正後のマップによってクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係の制御を行なう。
【0086】
上述の説明から明らかなように、本実施形態においては、学習条件として自動変速機13(自動変速装置)が変速時となり、変速段の変速作動(切替え)の完了が変速作動完了検出手段58によって検出されるとともに、クラッチ装置30が係合状態となった場合において、エンジン回転数Neと自動変速機13の入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上であることが回転差判定手段59によって確認される。この状態において、エンジントルク検出手段56によってそのときのスロットル開度(エンジン出力制御作動量)とエンジン回転数と からエンジントルクTeが求められる。
【0087】
そして推定クラッチトルク演算手段39が、クラッチ制御手段52によって目標クラッチトルクTrに制御されたときに実際に出力したクラッチトルクTcの推定値である推定クラッチトルクTesを前記求めたエンジントルクTeから演算する。その後、クラッチトルク−作動量補正手段60が、クラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係において目標クラッチトルクTrに制御したクラッチアクチュエータ作動量Saaに対応するクラッチトルクの値を推定クラッチトルクTesに置き換えて補正する。
【0088】
このように変速中に変速作動が完了しクラッチ装置30が係合状態となっている場合において、エンジン回転数Neと入力軸回転数Niとの差の絶対値|Ne−Ni|が所定値以上に大きい場合には、エンジントルクTeがクラッチ装置30に作用した状態で、そのときの推定クラッチトルクTesに基づいて補正後のクラッチトルクとするための学習が充分できる。
【0089】
また、上述したとおり推定クラッチトルク補正手段57は、推定クラッチトルク演算手段39によって演算された推定クラッチトルクTesをエンジン回転数Neおよび入力軸回転数Niに応じて補正する。これによって推定クラッチトルクの演算精度はさらに向上し、補正精度が向上する。ただし、本実施形態の形態に限らず、推定クラッチトルク補正手段57では、エンジン回転数Ne、及び入力軸回転数Niのいずれか一方だけ補正するようにしてもよいし、いずれの補正も実施しなくてもよく、これらによっても相応の効果は得られる。
【0090】
また、本実施形態においては、回転差変化量検出手段48が差の絶対値の変化割合が所定値以下であることを検出することによって、エンジントルクTeがクラッチ装置30に作用した係合状態において徐々に差の絶対値|Ne−Ni|が減少していくことを検出する。そして変化割合(微分値)が所定値以下であるとき、すなわち検出した差の絶対値が徐々に減少していく場合に学習を行なうようにするので、発進時に学習を行なう場合と同様に安定して精度のよいデータを取得できる。
【0091】
さらに、本実施形態のハイブリッド車両1は、クラッチ装置30がエンジン11のアウトプットシャフト(出力軸31)と自動変速機13の入力軸34とを係脱可能に連結し、MG12が、自動変速機13の出力軸35に回転連結されるとともに駆動軸15a、15bを介して駆動輪16a、16bに回転連結されている、いわゆるパラレル方式のハイブリッド車両である。このように構成されるハイブリッド車両1ではMG12のみの駆動力によって発進することもでき、そのときは発進時におけるクラッチアクチュエータ作動量Saの学習の機会が少なくなる。しかし、本発明では所定の条件における変速時において、クラッチアクチュエータ作動量の学習の機会を増やすことができるのでクラッチトルク−作動量記憶手段51に記憶されたクラッチアクチュエータ作動量SaとクラッチトルクTcとの対応関係を適宜補正しながら安定した変速制御を実施することができる。
【0092】
なお、本実施形態においては、フローチャートにおけるステップS23において、取得し記憶された補正後推定クラッチトルクTesns(d1)〜(d3)の値の差(幅)が所定値以下であるか確認する制御を設けた。しかしステップS23の制御は廃止してもよい。これによっても相応の効果は得られる。またそのときのフローチャートにおいては、ステップS11、ステップS20〜ステップS23を削除すればよい。また、ステップS15(回転差変化量検出手段48)の制御を廃止してもよい。これによっても相応の効果は得られる。
【0093】
また、本実施形態においては、ステップS17、18(推定クラッチトルク補正手段57)において、推定クラッチトルクTesをエンジン回転数Ne、及び入力軸回転数Niに応じて補正したが、これに限らず、入力軸回転数Niとエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|に応じてそれぞれ補正係数を求め補正するようにしてもよい。
【0094】
また、本実施形態においては、入力軸回転数Niとエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|が大きくなる場合として、低速段(1速段→2速段)のアップシフトの切替えの場合について説明した。しかしこの形態に限らず、別の実施例として例えば高速段である4速段(一の変速比)から、変速比が4速段の例えば70%である5速段(他の変速比)にアップシフトする場合についても条件を満たすことはでき、本発明を適用できる。
【0095】
つまり、4速段での入力軸回転数Ni4が、例えば7000rpm等の高い回転数であれば、5速段にアップシフトしたときの5速段での入力軸回転数Ni5は4900rpm(7000rpm×0.7)となる。これにより変速段を5速段に切替えた後に、クラッチ装置30の係合を開始するときのエンジン回転数Neが4速段のときのエンジン回転数Neと略同一であるとすると、5速段での入力軸回転数Ni5と、クラッチ装置30の係合開始時におけるエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は略2100rpmとなる。これによっても所定値2000rpmを上回っているので学習を実施し好適にデータを取得することができる。
【0096】
さらに、別の実施例として、図8の制御状態図に示すように、例えば運転者が意図して減速しようとしアクセルペダルを離して、自動変速機13が例えば2速段(一の変速比)から1速段(他の変速比(変速比は2速段の2倍とする))にダウンシフトして変速しようとした場合においても、同様に学習を行なう条件である大きな入力軸回転数Ni1とエンジン回転数Neとの差の絶対値|Ne−Ni1|を得ることができる。
【0097】
つまり、変速比を2速段から1速段に変速したことによって、1速段における入力軸回転数Ni1は2速段時の入力軸回転数Ni2の略倍となる。よって2速段で走行するハイブリッド車両1が、入力軸回転数Ni2が3000rpm(車速45km/h)にて走行している場合には、1速段にダウンシフトすることによって入力軸回転数Ni1は略倍の略6000rpm(車速略45km/h)となる(図8中2点鎖線参照)。そして、クラッチ装置30の係合を再び開始するときには、エンジン回転数Neは2速段での走行時のエンジン回転数Neに対しアクセルペダルを離している分だけ低く制御されるので、入力軸回転数Ni2とエンジン回転数Neとの間の回転数差の絶対値|Ne−Ni|は3000rpmを越える値となり所定値である2000rpmを大きく上回っているので学習を実施し好適にデータを取得することができる。このときエンジン回転は入力軸回転に引きずられる形となり、負のトルクとしてクラッチ装置30に作用するので、クラッチ装置30は良好に係合状態となり、そのときの推定クラッチトルクTesを補正後のクラッチトルクとするために充分に学習することができる。
【0098】
このように、上述した形態を含み、その他、様々な状況において、変速中に変速作動が完了しクラッチが係合状態となっている場合において、エンジン回転数Neと入力軸回転数Niとの間の差の絶対値|Ne−Ni|を求め、該差の絶対値|Ne−Ni|が所定値より大きいときに適宜学習を実施するので適切に学習の機会を増やすことができる。
【0099】
また、図7のフローチャートのステップS14に示すように本実施形態では、エンジン回転数Neと入力軸回転数Niとの間の差の絶対値|Ne−Ni|をまず求め、|Ne−Ni|が所定値以上であるときにステップS15以降の制御を実施するようにした。しかしこの形態に限らず、ステップS14では差の絶対値|Ne−Ni|のみをまず求め、ステップS15〜ステップS18までの制御を変速中において繰り返して実行し、取得した全てのデータをステップS14で取得した差の絶対値|Ne−Ni|とそれぞれ対応させて記憶するように制御してもよい。そしてクラッチ装置30が完全係合した変速終了後に、記憶した全てのデータの中から各データに対応する差の絶対値|Ne−Ni|が所定値(例えば2000rpm)を越えているデータのみを抽出してステップS19以降の制御を実行し、マップを補正するようにしてもよい。これによっても同様の効果が得られる。
【0100】
さらに、本実施形態では、エンジン11とMG12とが並列的な関係にあって、それぞれが独立して車両を駆動可能な構成のハイブリッド車の例を挙げて説明した。しかし、この構成に限らず、MGとエンジンとが直列に連結されMGで出力される駆動力が、差動装置(ディファレンシャル)14に伝達されるハイブリッド車や、エンジンのみによって走行する一般的な車両のクラッチ学習制御にも適用可能である。さらには、A/T車におけるトルクコンバータのクラッチ学習制御にも適用可能である。
【符号の説明】
【0101】
1・・・ハイブリッド車両、2・・・変速制御装置、11・・・エンジン、12・・・モータジェネレータ(MG)、13・・・自動変速装置(自動変速機)、17・・・クラッチアクチュエータ、18・・・シフトアクチュエータ、21・・・HV/ECU、22・・・MG/ECU、23・・・ENG/ECU、24・・・AMT/ECU、26・・・セレクトアクチュエータ、30・・・クラッチ(クラッチ装置)、31・・・アウトプットシャフト(エンジン出力軸)、34・・・自動変速機入力軸、35・・・自動変速機出力軸、36・・・入力軸回転数センサ、37・・・入力軸回転数検出手段、39・・・推定クラッチトルク演算手段、48・・・回転差変化量検出手段、49・・・エンジン出力制御手段、51・・・クラッチトルク−作動量記憶手段、52・・・クラッチ制御手段、53・・・対応関係補正手段、54・・・エンジン回転数検出手段、55・・・エンジン出力制御作動量検出手段、56・・・エンジントルク検出手段、57・・・推定クラッチトルク補正手段、58・・・変速作動完了検出手段、59・・・回転差判定手段、60・・・クラッチトルク−作動量補正手段、67・・・ストロークセンサ、68・・・スロットルセンサ、69・・・スロットル用アクチュエータ、70・・・スロットルバルブ、72・・・エンジン回転数センサ、Ne・・・エンジン回転数、Tc・・・クラッチトルク、Te・・・エンジントルク、Tes・・・推定クラッチトルク。
【特許請求の範囲】
【請求項1】
車両に搭載されたエンジンが出力するエンジントルクによって回転されるよう適合された入力軸の回転を前記エンジンのエンジン回転数が複数段の変速比毎に準備された各変速線を越えたときに一の変速比から他の変速比に変速して前記車両の駆動輪に回転連結された出力軸に伝達する自動変速装置と、
クラッチアクチュエータの作動によって前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱するとともに、係合状態において前記アウトプットシャフトから前記入力軸に伝達されるクラッチトルクを目標クラッチトルクに制御するクラッチと、
前記クラッチのクラッチトルクを制御する前記クラッチアクチュエータのクラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を記憶するクラッチトルク−作動量記憶手段と、
所要の目標クラッチトルクに対応する前記クラッチアクチュエータのクラッチアクチュエータ作動量を前記クラッチトルク−作動量記憶手段から求め前記クラッチアクチュエータを前記クラッチアクチュエータ作動量作動させて前記クラッチトルクを前記目標クラッチトルクに制御するクラッチ制御手段と、
前記エンジンのエンジン回転数を検出するエンジン回転数検出手段と、
前記エンジンの出力を制御するエンジン出力制御手段の作動量を検出するエンジン出力制御作動量検出手段と、
前記エンジン出力制御手段の各作動量における前記エンジンの回転数と前記エンジントルクとの関係に基づいて前記エンジン出力制御作動量検出手段が検出したエンジン出力制御作動量と前記エンジン回転数検出手段が検出したエンジン回転数とから前記エンジントルクを演算するエンジントルク検出手段と、
前記クラッチ制御手段が前記クラッチアクチュエータを前記目標クラッチトルクに対応するクラッチアクチュエータ作動量作動させたとき、前記エンジントルク検出手段が前記エンジン出力制御作動量と前記エンジン回転数とから演算したエンジントルクから前記エンジン回転数の加速度に前記エンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクを演算する推定クラッチトルク演算手段と、
前記クラッチアクチュエータを作動させたとき、前記推定クラッチトルク演算手段によって演算された推定クラッチトルクと前記クラッチアクチュエータ作動量との関係を学習し、前記クラッチトルク−作動量記憶手段に記憶された前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を補正する対応関係補正手段と、
前記自動変速装置の前記入力軸の入力軸回転数を検出する入力軸回転数検出手段と、
前記自動変速装置の入力軸又は出力軸に回転連結されたモータと、を備え、
前記対応関係補正手段は、
前記自動変速装置の変速時に、前記自動変速装置の変速作動が完了したことを検出する変速作動完了検出手段と、
前記変速作動完了検出手段によって変速作動の完了が検出された後に、前記クラッチが前記係合状態において、前記エンジン回転数と前記自動変速装置の前記入力軸回転数との差の絶対値が所定値以上であることを判定する回転差判定手段と、
前記変速時に前記変速作動が完了し、且つ前記差の絶対値が前記所定値以上であることを条件とし、前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係において、前記クラッチ制御手段によって前記クラッチアクチュエータに作動された前記目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクに置き換えるクラッチトルク−作動量補正手段と、
を有するハイブリッド車両の変速制御装置。
【請求項2】
請求項1において、
前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクを、前記エンジン回転数および前記入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有するハイブリッド車両の変速制御装置。
【請求項3】
請求項1または2において、
前記差の絶対値の変化割合が所定値以下であることを検出する回転差変化量検出手段を有するハイブリッド車両の変速制御装置。
【請求項4】
請求項1乃至3のいずれか1項において、
前記クラッチは前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱可能に連結し、
前記モータは、前記自動変速装置の出力軸に回転連結されるとともに前記駆動輪にモータ減速比で回転連結されているハイブリッド車両の変速制御装置。
【請求項1】
車両に搭載されたエンジンが出力するエンジントルクによって回転されるよう適合された入力軸の回転を前記エンジンのエンジン回転数が複数段の変速比毎に準備された各変速線を越えたときに一の変速比から他の変速比に変速して前記車両の駆動輪に回転連結された出力軸に伝達する自動変速装置と、
クラッチアクチュエータの作動によって前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱するとともに、係合状態において前記アウトプットシャフトから前記入力軸に伝達されるクラッチトルクを目標クラッチトルクに制御するクラッチと、
前記クラッチのクラッチトルクを制御する前記クラッチアクチュエータのクラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を記憶するクラッチトルク−作動量記憶手段と、
所要の目標クラッチトルクに対応する前記クラッチアクチュエータのクラッチアクチュエータ作動量を前記クラッチトルク−作動量記憶手段から求め前記クラッチアクチュエータを前記クラッチアクチュエータ作動量作動させて前記クラッチトルクを前記目標クラッチトルクに制御するクラッチ制御手段と、
前記エンジンのエンジン回転数を検出するエンジン回転数検出手段と、
前記エンジンの出力を制御するエンジン出力制御手段の作動量を検出するエンジン出力制御作動量検出手段と、
前記エンジン出力制御手段の各作動量における前記エンジンの回転数と前記エンジントルクとの関係に基づいて前記エンジン出力制御作動量検出手段が検出したエンジン出力制御作動量と前記エンジン回転数検出手段が検出したエンジン回転数とから前記エンジントルクを演算するエンジントルク検出手段と、
前記クラッチ制御手段が前記クラッチアクチュエータを前記目標クラッチトルクに対応するクラッチアクチュエータ作動量作動させたとき、前記エンジントルク検出手段が前記エンジン出力制御作動量と前記エンジン回転数とから演算したエンジントルクから前記エンジン回転数の加速度に前記エンジンの回転慣性モーメントを乗算した慣性トルクを減算して推定クラッチトルクを演算する推定クラッチトルク演算手段と、
前記クラッチアクチュエータを作動させたとき、前記推定クラッチトルク演算手段によって演算された推定クラッチトルクと前記クラッチアクチュエータ作動量との関係を学習し、前記クラッチトルク−作動量記憶手段に記憶された前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係を補正する対応関係補正手段と、
前記自動変速装置の前記入力軸の入力軸回転数を検出する入力軸回転数検出手段と、
前記自動変速装置の入力軸又は出力軸に回転連結されたモータと、を備え、
前記対応関係補正手段は、
前記自動変速装置の変速時に、前記自動変速装置の変速作動が完了したことを検出する変速作動完了検出手段と、
前記変速作動完了検出手段によって変速作動の完了が検出された後に、前記クラッチが前記係合状態において、前記エンジン回転数と前記自動変速装置の前記入力軸回転数との差の絶対値が所定値以上であることを判定する回転差判定手段と、
前記変速時に前記変速作動が完了し、且つ前記差の絶対値が前記所定値以上であることを条件とし、前記クラッチアクチュエータ作動量と前記クラッチトルクとの対応関係において、前記クラッチ制御手段によって前記クラッチアクチュエータに作動された前記目標クラッチトルクに対応するクラッチアクチュエータ作動量に対応するクラッチトルクの値を前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクに置き換えるクラッチトルク−作動量補正手段と、
を有するハイブリッド車両の変速制御装置。
【請求項2】
請求項1において、
前記推定クラッチトルク演算手段によって演算された前記推定クラッチトルクを、前記エンジン回転数および前記入力軸回転数の少なくとも一方に応じて補正する推定クラッチトルク補正手段を有するハイブリッド車両の変速制御装置。
【請求項3】
請求項1または2において、
前記差の絶対値の変化割合が所定値以下であることを検出する回転差変化量検出手段を有するハイブリッド車両の変速制御装置。
【請求項4】
請求項1乃至3のいずれか1項において、
前記クラッチは前記エンジンのアウトプットシャフトと前記自動変速装置の前記入力軸とを係脱可能に連結し、
前記モータは、前記自動変速装置の出力軸に回転連結されるとともに前記駆動輪にモータ減速比で回転連結されているハイブリッド車両の変速制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−201129(P2012−201129A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−64758(P2011−64758)
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月23日(2011.3.23)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]