
ハイブリッド車両の異音検出装置
【課題】電動機が回転している状態でも、エンジントルクの変動により噛み合い機構で異音が発生していることを検出することができるハイブリッド車両の異音検出装置を提供する。
【解決手段】電子制御装置は、第2のモータジェネレータの回転速度Nm2を算出し、回転速度Nm2が所定時間内に増減を繰り返す場合に、回転速度Nm2の変動幅ΔNm2(回転速度Nm2の極大値と極小値との差)が所定の判定幅ΔNth2を超えているか否かを判断し、変動幅ΔNm2が判定幅ΔNth2を越えている場合に、異音発生箇所の変動が大きくトランスアクスル内で異音が生じていると判断する。一方、電子制御装置は、変動幅ΔNm2が判定幅ΔNth2を超えていない場合には、トランスアクスル内で異音が生じていないと判断する。
【解決手段】電子制御装置は、第2のモータジェネレータの回転速度Nm2を算出し、回転速度Nm2が所定時間内に増減を繰り返す場合に、回転速度Nm2の変動幅ΔNm2(回転速度Nm2の極大値と極小値との差)が所定の判定幅ΔNth2を超えているか否かを判断し、変動幅ΔNm2が判定幅ΔNth2を越えている場合に、異音発生箇所の変動が大きくトランスアクスル内で異音が生じていると判断する。一方、電子制御装置は、変動幅ΔNm2が判定幅ΔNth2を超えていない場合には、トランスアクスル内で異音が生じていないと判断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ハイブリッド車両のトランスアクスル内の異音を検出する技術に関する。
【背景技術】
【0002】
近年、車両の駆動力源として、燃料の燃焼により動力を出力するエンジンと、電力の供給により動力を出力する電動機とを搭載したハイブリッド車両が提案されている。このハイブリッド車両においては、各種の条件に基づいて、エンジンおよび電動機の駆動・停止を制御することにより、燃費の向上および騒音の低減ならびに排気ガスの低減を図ることができるものとされている。
【0003】
このようなハイブリッド車両の駆動装置で生じる異音の検出手法の一例が、下記の特許文献1に記載されている。この特許文献1には、車輪に連結された動力伝達部材と、動力伝達部材に並列に連結されたエンジンおよび電動機と、動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両において、電動機のトルクが実質的に零に制御されている場合に、回転角が増減しているときの電動機の回転角の変動幅(回転角の極大値と極小値との差)が所定の判定値を越えたときに、エンジントルクの変動により噛み合い機構で異音が発生していることを検出する駆動装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−318721号公報
【特許文献2】特開2001−221683号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1に開示されたハイブリッド車両の駆動装置は、上述のように電動機の回転角が増減しているときの回転角の極大値と極小値との差に基づいて異音を検出する。しかし、電動機が所定速度で回転している状態では、そもそも電動機の回転角は単調に増加あるいは減少するため、そもそも回転角の極大値あるいは極小値が存在せず、特許文献1に開示された駆動装置では異音を検出することができない。
【0006】
この発明は、このような問題点を解決するためになされたものであって、この発明の目的は、電動機が回転している状態でも、エンジントルクの変動により噛み合い機構で異音が発生していることを検出することができるハイブリッド車両の異音検出装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係るハイブリッド車両の異音検出装置は、エンジンと、回転電機と、エンジンおよび回転電機の少なくともいずれかと車輪との間で動力を伝達する動力伝達部材と、動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両の異音を検出する。この異音検出装置は、回転電機の回転速度を検出する検出部と、エンジントルクの変動により噛み合い機構で異音が発生しているか否かを判断する判断部とを含む。判断部は、回転電機の回転速度の変動幅が所定のしきい値を越えているか否かを判断し、回転速度の変動幅が所定のしきい値を越えている場合に噛み合い機構で異音が発生していると判断し、回転速度の変動幅が所定のしきい値を越えていない場合に噛み合い機構で異音が発生していないと判断する。
【発明の効果】
【0008】
本発明によれば、電動機が回転している状態でも、エンジントルクの変動により噛み合い機構で異音が発生していることを検出することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態の係る異音検出装置を備えたであるハイブリッド車の概念図である。
【図2】本発明の実施の形態の係る異音検出装置の異音検出手法を模式的に示した図である。
【図3】異音発生に至る第1のモータジェネレータの回転速度の変動幅ΔNm1のレベルと第2のモータジェネレータのトルクとの関係を示した図である。
【発明を実施するための形態】
【0010】
以下に、この発明の実施の形態について図面を参照して詳細に説明する。なお、以下において同一または相当部分には同一符号を付してその説明は繰返さない。
【0011】
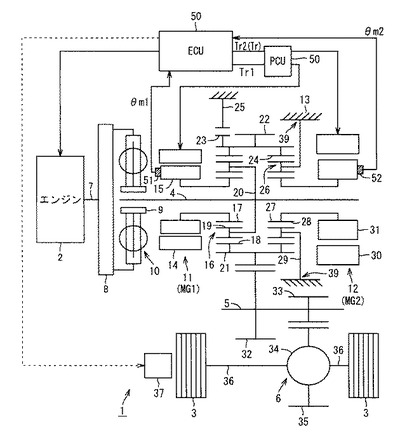
図1は、この発明の一実施形態である、FF(フロントエンジン−フロントドライブ:エンジン前置き前輪駆動)形式のハイブリッド車両1の駆動装置(パワートレイン)およびその制御系統を示す概念図である。
【0012】
図1を参照して、ハイブリッド車両1は、エンジン2および車輪3を有しており、インプットシャフト4、アウトプットシャフト5、デファレンシャル6などにより、エンジン2と車輪3との間の動力伝達経路が構成されている。
【0013】
エンジン2としては、内燃機関、具体的にはガソリンエンジン、ディーゼルエンジン、LPGエンジン、メタノールエンジンまたは水素エンジンなどを用いることができる。エンジンのクランクシャフト7には、フライホイール8が形成されている。
【0014】
一方、インプットシャフト4の外周にはスリーブ9がスプライン嵌合されており、フライホイール8とスリーブ9との間の動力伝達経路には、ダンパ機構10が配置されている。また、インプットシャフト4の外側には、第1のモータジェネレータ(MG1)11および第2のモータジェネレータ(MG2)12が設けられている。第1のモータジェネレータ11および第2のモータジェネレータ12は、電力の供給により駆動する電動機としての機能(力行機能)と、機械エネルギを電気エネルギに変換する発電機としての機能(回生機能)とを兼ね備えている。第1のモータジェネレータ11および第2のモータジェネレータ12には、モータ回転角を逐次検出するための角度センサ51および52がそれぞれ配置されている。
【0015】
また、第1のモータジェネレータ11および第2のモータジェネレータ12に電力を供給する蓄電装置(図示せず)が設けられている。この蓄電装置としては、バッテリまたはキャパシタを用いることができる。
【0016】
さらに、インプットシャフト4、アウトプットシャフト5、デファレンシャル6、第1のモータジェネレータ11、第2のモータジェネレータ12などの部品を収納するケーシング13が設けられている。第1のモータジェネレータ11は、ケーシング13に固定されたステータ14と、回転自在なロータ15とを有している。
【0017】
インプットシャフト4の外側であって、第1のモータジェネレータ11と第2のモータジェネレータ12との間には、動力分配機構16が設けられている。この動力分配機構16は、いわゆるシングルピニオン形式の遊星歯車機構により構成されている。
【0018】
すなわち、動力分配機構16は、サンギヤ17と、サンギヤ17と同心状に配置されたリングギヤ18と、サンギヤ17およびリングギヤ18に噛合するピニオンギヤ19を保持したキャリア20とを有している。そして、サンギヤ17とロータ15とが一体回転するように連結され、キャリア20とインプットシャフト4とが一体回転されるように連結されている。
【0019】
リングギヤ18は、環状部材21の内周側に形成されている。この環状部材21の外周には、ギヤ22およびパーキングギヤ23が形成されているとともに、環状部材21の内周には、リングギヤ18以外のリングギヤ24が形成されている。さらに、ケーシング13内には、パーキングギヤ23と係合可能であり、かつパーキングギヤ23から離脱可能なパーキングボール25が設けられている。
【0020】
さらに、インプットシャフト4の外側には、プラネタリギヤ26が設けられている。プラネタリギヤ26は、サンギヤ27と、リングギヤ24と、サンギヤ27およびリングギヤ24に噛合されたピニオンギヤ28を保持するキャリア29とを有している。
【0021】
第2のモータジェネレータ12は、ケーシング13に固定されたステータ30と、回転自在なロータ31とを有している。そして、サンギヤ27とロータ31とが一体回転するように連結されている。このように車輪3に連結された動力伝達経路としての環状部材21に対して、エンジン2と第2のモータジェネレータ12とが相互に並列に配置されている。
【0022】
また、キャリア29がケーシング13に固定されている。具体的には、キャリア29とケーシング13との連結部39により、キャリア29が回り止めされている。この連結部39は、半径方向に突出した凸部(図示せず)と、この凸部が配置される凹部(図示せず)とを有する。
【0023】
インプットシャフト4とアウトプットシャフト5とは相互に平行に配置されており、アウトプットシャフト5には、ドリブンギヤ32およびファイナルドライブピニオンギヤ33が形成されている。そして、ギヤ22とドリブンギヤ32とが噛合されている。
【0024】
さらに、デファレンシャル6は、アウトプットシャフト5の回転軸線(図示せず)と平行な回転軸線を中心として回転可能なデフケース34と、デフケース34の外周に形成されたリングギヤ35と、デフケース34により保持されたピニオンギヤ(図示せず)と、ピニオンギヤに嵌合されたサイドギヤ(図示せず)とを有している。リングギヤ35とファイナルドライブピニオンギヤ33とが嵌合されている。
【0025】
さらに、サイドギヤにはドライブシャフト36が連結され、ドライブシャフト36に車輪3が連結されている。さらにまた、制動要求、具体的には主としてブレーキペダルの踏み込み状態に基づいて、車輪3の回転速度の上昇を抑制する制動装置37が設けられている。なお、制動装置37は、制動力がECU90からの信号によって電子制御することも可能であるように構成されている。
【0026】
次に、ハイブリッド車両1の制御系統について説明する。まず、電子制御装置50が設けられており、この電子制御装置50は、演算処理装置(CPUまたはMPU)および記憶装置(RAMおよびROM)ならびに入出力インターフェイスを主体とするマイクロコンピュータにより構成されている。この電子制御装置50には、角度センサ51,52の出力信号、エンジン回転速度センサの信号、加速要求センサの信号、制動要求センサの信号、シフトポジションセンサの信号、外気温センサの信号、蓄電装置の充電量センサの信号、路面の傾斜角度センサ(Gセンサ)の信号などが入力される。
【0027】
これに対して、電子制御装置50からは、エンジン2を制御する信号、第1のモータジェネレータ11、第2のモータジェネレータ12および制動装置37を制御する信号などが出力される。
【0028】
図1には、これらの信号の一部として、第1のモータジェネレータ11のトルク指令値Tr1および第2のモータジェネレータ12のトルク指令値Tr2ならびに、第1のモータジェネレータ11の回転角検出値θm1および第2のモータジェネレータ12の回転角検出値θm2が例示されている。
【0029】
蓄電装置から供給された直流電力を、第1のモータジェネレータ11および第2のモータジェネレータ12の駆動電力に変換する電力変換器を含むPCU(Power Control Unit)55によって、トルク指令値Tr1,Tr2を実現するような交流電圧が第1のモータジェネレータ11および第2のモータジェネレータ12に供給される。
【0030】
このように構成されたハイブリッド車両1においては、電子制御装置50に入力される信号および電子制御装置50に記憶されているデータに基づいて、エンジン2、第1のモータジェネレータ11、第2のモータジェネレータ12が制御される。
【0031】
たとえば、ハイブリッド車両1が停止している状態からエンジン2を始動する場合は、第1のモータジェネレータ11を電動機として駆動させる。すると、動力分配機構16のリングギヤ18が反力要素となり、第1のモータジェネレータ11のトルクは、キャリア20、インプットシャフト4を経由してエンジン2に伝達されて、エンジン2がクランキングされる。
【0032】
このようにして、エンジン2をクランキングするとともに、燃料の燃焼が行なわれて、エンジン2が自律回転可能となる。エンジン2が自律回転すると、エンジン2のトルクがインプットシャフト4、キャリア20、リングギヤ18を経由してギヤ22に伝達される。ギヤ22のトルクは、アウトプットシャフト5、デファレンシャル6を経由して車輪3に伝達されて駆動力が発生する。
【0033】
また、エンジン2の動力を用いて第1のモータジェネレータ11で発電を行ない、発生した電力を蓄電装置に充電することもできる。
【0034】
さらに、第2のモータジェネレータ12を電動機として駆動させ、そのトルクを、サンギヤ27、プラネタリギヤ26、リングギヤ24、ギヤ22を経由させて車輪3へ伝達することも可能である。第2のモータジェネレータ12のトルクをリングギヤ24へ伝達する場合、第2のモータジェネレータ12の回転方向と、リングギヤ24の回転方向とは逆となる。
【0035】
このように、図1に示すハイブリッド車両1は、エンジン2または第2のモータジェネレータ12のうちの少なくとも一方を駆動力源として用い、それらのトルクを、インプットシャフト4、動力分配機構16、プラネタリギヤ26、アウトプットシャフト5、デファレンシャル6で構成されたトランスアクスルによって、車輪3に伝達することが可能である。
【0036】
さらに、ハイブリッド車両の惰力走行時には、ハイブリッド車両1の走行エネルギを上述したトランスアクスルを経由させて第2のモータジェネレータ12に伝達するとともに、第2のモータジェネレータ12を発電機として機能させ、発生した電力を蓄電装置に充電することも可能である。なお、第2のモータジェネレータ12を電動機として駆動させる場合において、第2のモータジェネレータ12の出力トルクを正方向のトルクと呼ぶ。これに対して、第2のモータジェネレータ12を発電機として機能させる場合において、第2のモータジェネレータ12の回生トルクを負方向のトルクと呼ぶ。
【0037】
ところで、エンジン2は、燃料の燃焼による熱エネルギを回転運動に変換するものであるために、トルク変動が不可避的に生じる。特に、エンジン回転速度が所定回転速度以下である場合は燃焼が不安定であり、エンジントルクの変動幅が大きくなる。
【0038】
また、エンジン2の高負荷時、たとえばエンジントルクを車輪3に伝達し、かつエンジントルクにより第1のモータジェネレータ11で発電を行なうときは、エンジントルクを高めるために燃料の供給量を増加するため、エンジントルクの変動幅が大きくなる。
【0039】
このようなエンジントルクの変動が生じた場合は、上述したトランスアクスルを構成する各ギヤ同士の噛み合い部で、衝撃による振動や異音が生じる可能性がある。なお、トランスアクスルを構成する各ギヤ同士の噛み合い部には、キャリア29とケーシング13との連結部39なども含まれる。
【0040】
本実施の形態の特徴的な点は、上述のようなエンジントルクの変動に起因してトランスアクスル内で生じる異音を、電子制御装置50が、第1のモータジェネレータ11の回転速度Nm1の変動幅あるいは第2のモータジェネレータ12の回転速度Nm2の変動幅に基づいて検出する点である。
【0041】
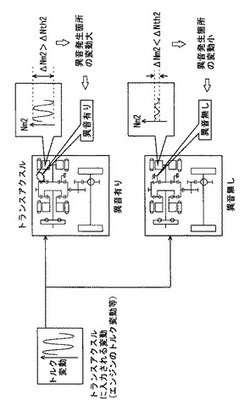
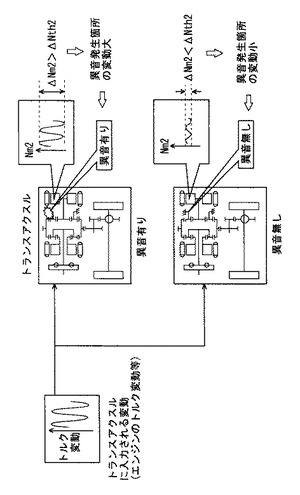
図2は、本発明の実施の形態の係る異音検出装置である電子制御装置50が、第2のモータジェネレータ12の回転速度Nm2の変動幅に基づいてトランスアクスル内で生じる異音を検出する手法を模式的に示した図である。
【0042】
図2に示すように、トランスアクスルにトルク変動(代表的にはエンジン2のトルク変動)が入力された場合において、トランスアクスル内で異音が生じていないときには、第2のモータジェネレータ12の回転速度Nm2の変動幅は小さい。一方、トランスアクスル内で異音が生じているときには、異音発生箇所(トランスアクスル内のギヤ同士の噛み合い部など)の回転変動も大きく、この影響で第2のモータジェネレータ12の回転速度Nm2の変動幅ΔNm2も大きくなる現象が生じる傾向にある。
【0043】
電子制御装置50は、この現象を検出することによって、トランスアクスル内で生じる異音を検出する。
【0044】
すなわち、電子制御装置50は、角度センサ52からの第2のモータジェネレータ12の回転角検出値θm2に基づいて第2のモータジェネレータ12の回転速度Nm2を算出し、回転速度Nm2が所定時間内に増減を繰り返す場合に、回転速度Nm2の変動幅ΔNm2(回転速度Nm2の極大値と極小値との差)が所定の判定幅ΔNth2を超えているか否かを判断し、変動幅ΔNm2が判定幅ΔNth2を越えている場合(図2の「ΔNm2>ΔNth2」の場合)に、異音発生箇所の変動が大きくトランスアクスル内で異音が生じている(図2の「異音有り」)と判断する。
【0045】
一方、電子制御装置50は、変動幅ΔNm2が判定幅ΔNth2を超えていない場合(図2の「ΔNm2<ΔNth2」の場合)には、異音発生箇所の変動が小さくトランスアクスル内で異音が生じていない(図2の「異音無し」)と判断する。なお、所定の判定幅ΔNth2は、異音発生に至るレベルの第2のモータジェネレータ12の回転速度Nm2の変動幅を予め実験的に求めた値に応じて決定し、電子制御装置50の記憶装置に予め記憶しておけばよい。
【0046】
これにより、第2のモータジェネレータ12が回転している状態においても、騒音計や振動計などの新たな専用の装置を設けることなく、エンジントルクの変動に起因してトランスアクスル内で生じる異音を検出することができる。そして、異音を検出した場合には、電子制御装置50が、エンジン2の制御信号、第1のモータジェネレータ11のトルク指令値Tr1、第2のモータジェネレータ12のトルク指令値Tr2、制動装置37の制御信号などを、異音を解消するように変更することによって、適切に異音の低減を図ることが可能となる。
【0047】
特に、モータジェネレータの回転速度の実際の変動に基づいて異音が生じているか否かを判断するため、エンジンの回転変動ばらつき、あるいは部品の寸法ばらつきや経時劣化にも対応して、トランスアクスル内で生じる異音を検出することができる。
【0048】
なお、トランスアクスル内で生じる異音の強弱は、第2のモータジェネレータ12の回転速度Nm2の変化速度の大きさとも相関関係がある。この点を考慮して、電子制御装置50が、第2のモータジェネレータ12の回転速度Nm2の変化速度に基づいて、トランスアクスル内で生じる異音を検出するようにしてもよい。
【0049】
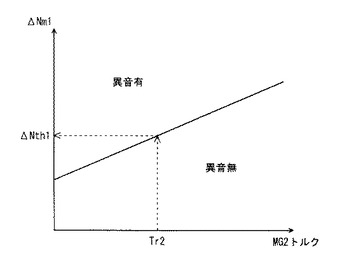
また、第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1と所定の判定幅ΔNth1とを比較することによってもトランスアクスル内で生じる異音を検出することが可能である。ただし、この場合は、第2のモータジェネレータ12のトルク(MG2トルク)も考慮する必要がある。
【0050】
すなわち、図3に示すように、異音発生に至る第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1のレベルは、MG2トルクが大きいほど大きくなる。
【0051】
そこで、図3に示すようなマップを実験的に求めて電子制御装置50の記憶装置に予め記憶しておき、電子制御装置50が、このマップを参照して現在のMG2トルク(たとえば現在のトルク指令値Tr2)に対応する判定幅ΔNth1を算出し、第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1が算出した判定幅ΔNth1を越えている場合に、トランスアクスル内で異音が生じていると判断するようにすればよい。ここで、MG2トルクとしては、トルク指令値Tr2に限定されず、たとえば各センサの検出値に基づいて推定したトルク値を用いてもよい。
【0052】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0053】
1 ハイブリッド車両、2 エンジン、3 車輪、4 インプットシャフト、5 アウトプットシャフト、6 デファレンシャル、7 クランクシャフト、8 フライホイール、9 スリーブ、10 ダンパ機構、11 モータジェネレータ(MG1)、12 モータジェネレータ(MG1)、13 ケーシング、14 ステータ(MG1)、15 ロータ(MG1)、16 動力分配機構、17 サンギヤ、18 リングギヤ、19 ピニオンギヤ、20 キャリア、21 環状部材、22 ギヤ、23 パーキングギヤ、24 リングギヤ、25 パーキングボール、26 プラネタリギヤ、27 サンギヤ、28 ピニオンギヤ、29 キャリア、30 ステータ(MG2)、31 ロータ(MG2)、32 ドリブンギヤ、33 ファイナルドライブピニオンギヤ、34 デフケース、35 リングギヤ、36 ドライブシャフト、37 制動装置、39 連結部、50 電子制御装置、51,52 角度センサ。
【技術分野】
【0001】
この発明は、ハイブリッド車両のトランスアクスル内の異音を検出する技術に関する。
【背景技術】
【0002】
近年、車両の駆動力源として、燃料の燃焼により動力を出力するエンジンと、電力の供給により動力を出力する電動機とを搭載したハイブリッド車両が提案されている。このハイブリッド車両においては、各種の条件に基づいて、エンジンおよび電動機の駆動・停止を制御することにより、燃費の向上および騒音の低減ならびに排気ガスの低減を図ることができるものとされている。
【0003】
このようなハイブリッド車両の駆動装置で生じる異音の検出手法の一例が、下記の特許文献1に記載されている。この特許文献1には、車輪に連結された動力伝達部材と、動力伝達部材に並列に連結されたエンジンおよび電動機と、動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両において、電動機のトルクが実質的に零に制御されている場合に、回転角が増減しているときの電動機の回転角の変動幅(回転角の極大値と極小値との差)が所定の判定値を越えたときに、エンジントルクの変動により噛み合い機構で異音が発生していることを検出する駆動装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−318721号公報
【特許文献2】特開2001−221683号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1に開示されたハイブリッド車両の駆動装置は、上述のように電動機の回転角が増減しているときの回転角の極大値と極小値との差に基づいて異音を検出する。しかし、電動機が所定速度で回転している状態では、そもそも電動機の回転角は単調に増加あるいは減少するため、そもそも回転角の極大値あるいは極小値が存在せず、特許文献1に開示された駆動装置では異音を検出することができない。
【0006】
この発明は、このような問題点を解決するためになされたものであって、この発明の目的は、電動機が回転している状態でも、エンジントルクの変動により噛み合い機構で異音が発生していることを検出することができるハイブリッド車両の異音検出装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係るハイブリッド車両の異音検出装置は、エンジンと、回転電機と、エンジンおよび回転電機の少なくともいずれかと車輪との間で動力を伝達する動力伝達部材と、動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両の異音を検出する。この異音検出装置は、回転電機の回転速度を検出する検出部と、エンジントルクの変動により噛み合い機構で異音が発生しているか否かを判断する判断部とを含む。判断部は、回転電機の回転速度の変動幅が所定のしきい値を越えているか否かを判断し、回転速度の変動幅が所定のしきい値を越えている場合に噛み合い機構で異音が発生していると判断し、回転速度の変動幅が所定のしきい値を越えていない場合に噛み合い機構で異音が発生していないと判断する。
【発明の効果】
【0008】
本発明によれば、電動機が回転している状態でも、エンジントルクの変動により噛み合い機構で異音が発生していることを検出することができる。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態の係る異音検出装置を備えたであるハイブリッド車の概念図である。
【図2】本発明の実施の形態の係る異音検出装置の異音検出手法を模式的に示した図である。
【図3】異音発生に至る第1のモータジェネレータの回転速度の変動幅ΔNm1のレベルと第2のモータジェネレータのトルクとの関係を示した図である。
【発明を実施するための形態】
【0010】
以下に、この発明の実施の形態について図面を参照して詳細に説明する。なお、以下において同一または相当部分には同一符号を付してその説明は繰返さない。
【0011】
図1は、この発明の一実施形態である、FF(フロントエンジン−フロントドライブ:エンジン前置き前輪駆動)形式のハイブリッド車両1の駆動装置(パワートレイン)およびその制御系統を示す概念図である。
【0012】
図1を参照して、ハイブリッド車両1は、エンジン2および車輪3を有しており、インプットシャフト4、アウトプットシャフト5、デファレンシャル6などにより、エンジン2と車輪3との間の動力伝達経路が構成されている。
【0013】
エンジン2としては、内燃機関、具体的にはガソリンエンジン、ディーゼルエンジン、LPGエンジン、メタノールエンジンまたは水素エンジンなどを用いることができる。エンジンのクランクシャフト7には、フライホイール8が形成されている。
【0014】
一方、インプットシャフト4の外周にはスリーブ9がスプライン嵌合されており、フライホイール8とスリーブ9との間の動力伝達経路には、ダンパ機構10が配置されている。また、インプットシャフト4の外側には、第1のモータジェネレータ(MG1)11および第2のモータジェネレータ(MG2)12が設けられている。第1のモータジェネレータ11および第2のモータジェネレータ12は、電力の供給により駆動する電動機としての機能(力行機能)と、機械エネルギを電気エネルギに変換する発電機としての機能(回生機能)とを兼ね備えている。第1のモータジェネレータ11および第2のモータジェネレータ12には、モータ回転角を逐次検出するための角度センサ51および52がそれぞれ配置されている。
【0015】
また、第1のモータジェネレータ11および第2のモータジェネレータ12に電力を供給する蓄電装置(図示せず)が設けられている。この蓄電装置としては、バッテリまたはキャパシタを用いることができる。
【0016】
さらに、インプットシャフト4、アウトプットシャフト5、デファレンシャル6、第1のモータジェネレータ11、第2のモータジェネレータ12などの部品を収納するケーシング13が設けられている。第1のモータジェネレータ11は、ケーシング13に固定されたステータ14と、回転自在なロータ15とを有している。
【0017】
インプットシャフト4の外側であって、第1のモータジェネレータ11と第2のモータジェネレータ12との間には、動力分配機構16が設けられている。この動力分配機構16は、いわゆるシングルピニオン形式の遊星歯車機構により構成されている。
【0018】
すなわち、動力分配機構16は、サンギヤ17と、サンギヤ17と同心状に配置されたリングギヤ18と、サンギヤ17およびリングギヤ18に噛合するピニオンギヤ19を保持したキャリア20とを有している。そして、サンギヤ17とロータ15とが一体回転するように連結され、キャリア20とインプットシャフト4とが一体回転されるように連結されている。
【0019】
リングギヤ18は、環状部材21の内周側に形成されている。この環状部材21の外周には、ギヤ22およびパーキングギヤ23が形成されているとともに、環状部材21の内周には、リングギヤ18以外のリングギヤ24が形成されている。さらに、ケーシング13内には、パーキングギヤ23と係合可能であり、かつパーキングギヤ23から離脱可能なパーキングボール25が設けられている。
【0020】
さらに、インプットシャフト4の外側には、プラネタリギヤ26が設けられている。プラネタリギヤ26は、サンギヤ27と、リングギヤ24と、サンギヤ27およびリングギヤ24に噛合されたピニオンギヤ28を保持するキャリア29とを有している。
【0021】
第2のモータジェネレータ12は、ケーシング13に固定されたステータ30と、回転自在なロータ31とを有している。そして、サンギヤ27とロータ31とが一体回転するように連結されている。このように車輪3に連結された動力伝達経路としての環状部材21に対して、エンジン2と第2のモータジェネレータ12とが相互に並列に配置されている。
【0022】
また、キャリア29がケーシング13に固定されている。具体的には、キャリア29とケーシング13との連結部39により、キャリア29が回り止めされている。この連結部39は、半径方向に突出した凸部(図示せず)と、この凸部が配置される凹部(図示せず)とを有する。
【0023】
インプットシャフト4とアウトプットシャフト5とは相互に平行に配置されており、アウトプットシャフト5には、ドリブンギヤ32およびファイナルドライブピニオンギヤ33が形成されている。そして、ギヤ22とドリブンギヤ32とが噛合されている。
【0024】
さらに、デファレンシャル6は、アウトプットシャフト5の回転軸線(図示せず)と平行な回転軸線を中心として回転可能なデフケース34と、デフケース34の外周に形成されたリングギヤ35と、デフケース34により保持されたピニオンギヤ(図示せず)と、ピニオンギヤに嵌合されたサイドギヤ(図示せず)とを有している。リングギヤ35とファイナルドライブピニオンギヤ33とが嵌合されている。
【0025】
さらに、サイドギヤにはドライブシャフト36が連結され、ドライブシャフト36に車輪3が連結されている。さらにまた、制動要求、具体的には主としてブレーキペダルの踏み込み状態に基づいて、車輪3の回転速度の上昇を抑制する制動装置37が設けられている。なお、制動装置37は、制動力がECU90からの信号によって電子制御することも可能であるように構成されている。
【0026】
次に、ハイブリッド車両1の制御系統について説明する。まず、電子制御装置50が設けられており、この電子制御装置50は、演算処理装置(CPUまたはMPU)および記憶装置(RAMおよびROM)ならびに入出力インターフェイスを主体とするマイクロコンピュータにより構成されている。この電子制御装置50には、角度センサ51,52の出力信号、エンジン回転速度センサの信号、加速要求センサの信号、制動要求センサの信号、シフトポジションセンサの信号、外気温センサの信号、蓄電装置の充電量センサの信号、路面の傾斜角度センサ(Gセンサ)の信号などが入力される。
【0027】
これに対して、電子制御装置50からは、エンジン2を制御する信号、第1のモータジェネレータ11、第2のモータジェネレータ12および制動装置37を制御する信号などが出力される。
【0028】
図1には、これらの信号の一部として、第1のモータジェネレータ11のトルク指令値Tr1および第2のモータジェネレータ12のトルク指令値Tr2ならびに、第1のモータジェネレータ11の回転角検出値θm1および第2のモータジェネレータ12の回転角検出値θm2が例示されている。
【0029】
蓄電装置から供給された直流電力を、第1のモータジェネレータ11および第2のモータジェネレータ12の駆動電力に変換する電力変換器を含むPCU(Power Control Unit)55によって、トルク指令値Tr1,Tr2を実現するような交流電圧が第1のモータジェネレータ11および第2のモータジェネレータ12に供給される。
【0030】
このように構成されたハイブリッド車両1においては、電子制御装置50に入力される信号および電子制御装置50に記憶されているデータに基づいて、エンジン2、第1のモータジェネレータ11、第2のモータジェネレータ12が制御される。
【0031】
たとえば、ハイブリッド車両1が停止している状態からエンジン2を始動する場合は、第1のモータジェネレータ11を電動機として駆動させる。すると、動力分配機構16のリングギヤ18が反力要素となり、第1のモータジェネレータ11のトルクは、キャリア20、インプットシャフト4を経由してエンジン2に伝達されて、エンジン2がクランキングされる。
【0032】
このようにして、エンジン2をクランキングするとともに、燃料の燃焼が行なわれて、エンジン2が自律回転可能となる。エンジン2が自律回転すると、エンジン2のトルクがインプットシャフト4、キャリア20、リングギヤ18を経由してギヤ22に伝達される。ギヤ22のトルクは、アウトプットシャフト5、デファレンシャル6を経由して車輪3に伝達されて駆動力が発生する。
【0033】
また、エンジン2の動力を用いて第1のモータジェネレータ11で発電を行ない、発生した電力を蓄電装置に充電することもできる。
【0034】
さらに、第2のモータジェネレータ12を電動機として駆動させ、そのトルクを、サンギヤ27、プラネタリギヤ26、リングギヤ24、ギヤ22を経由させて車輪3へ伝達することも可能である。第2のモータジェネレータ12のトルクをリングギヤ24へ伝達する場合、第2のモータジェネレータ12の回転方向と、リングギヤ24の回転方向とは逆となる。
【0035】
このように、図1に示すハイブリッド車両1は、エンジン2または第2のモータジェネレータ12のうちの少なくとも一方を駆動力源として用い、それらのトルクを、インプットシャフト4、動力分配機構16、プラネタリギヤ26、アウトプットシャフト5、デファレンシャル6で構成されたトランスアクスルによって、車輪3に伝達することが可能である。
【0036】
さらに、ハイブリッド車両の惰力走行時には、ハイブリッド車両1の走行エネルギを上述したトランスアクスルを経由させて第2のモータジェネレータ12に伝達するとともに、第2のモータジェネレータ12を発電機として機能させ、発生した電力を蓄電装置に充電することも可能である。なお、第2のモータジェネレータ12を電動機として駆動させる場合において、第2のモータジェネレータ12の出力トルクを正方向のトルクと呼ぶ。これに対して、第2のモータジェネレータ12を発電機として機能させる場合において、第2のモータジェネレータ12の回生トルクを負方向のトルクと呼ぶ。
【0037】
ところで、エンジン2は、燃料の燃焼による熱エネルギを回転運動に変換するものであるために、トルク変動が不可避的に生じる。特に、エンジン回転速度が所定回転速度以下である場合は燃焼が不安定であり、エンジントルクの変動幅が大きくなる。
【0038】
また、エンジン2の高負荷時、たとえばエンジントルクを車輪3に伝達し、かつエンジントルクにより第1のモータジェネレータ11で発電を行なうときは、エンジントルクを高めるために燃料の供給量を増加するため、エンジントルクの変動幅が大きくなる。
【0039】
このようなエンジントルクの変動が生じた場合は、上述したトランスアクスルを構成する各ギヤ同士の噛み合い部で、衝撃による振動や異音が生じる可能性がある。なお、トランスアクスルを構成する各ギヤ同士の噛み合い部には、キャリア29とケーシング13との連結部39なども含まれる。
【0040】
本実施の形態の特徴的な点は、上述のようなエンジントルクの変動に起因してトランスアクスル内で生じる異音を、電子制御装置50が、第1のモータジェネレータ11の回転速度Nm1の変動幅あるいは第2のモータジェネレータ12の回転速度Nm2の変動幅に基づいて検出する点である。
【0041】
図2は、本発明の実施の形態の係る異音検出装置である電子制御装置50が、第2のモータジェネレータ12の回転速度Nm2の変動幅に基づいてトランスアクスル内で生じる異音を検出する手法を模式的に示した図である。
【0042】
図2に示すように、トランスアクスルにトルク変動(代表的にはエンジン2のトルク変動)が入力された場合において、トランスアクスル内で異音が生じていないときには、第2のモータジェネレータ12の回転速度Nm2の変動幅は小さい。一方、トランスアクスル内で異音が生じているときには、異音発生箇所(トランスアクスル内のギヤ同士の噛み合い部など)の回転変動も大きく、この影響で第2のモータジェネレータ12の回転速度Nm2の変動幅ΔNm2も大きくなる現象が生じる傾向にある。
【0043】
電子制御装置50は、この現象を検出することによって、トランスアクスル内で生じる異音を検出する。
【0044】
すなわち、電子制御装置50は、角度センサ52からの第2のモータジェネレータ12の回転角検出値θm2に基づいて第2のモータジェネレータ12の回転速度Nm2を算出し、回転速度Nm2が所定時間内に増減を繰り返す場合に、回転速度Nm2の変動幅ΔNm2(回転速度Nm2の極大値と極小値との差)が所定の判定幅ΔNth2を超えているか否かを判断し、変動幅ΔNm2が判定幅ΔNth2を越えている場合(図2の「ΔNm2>ΔNth2」の場合)に、異音発生箇所の変動が大きくトランスアクスル内で異音が生じている(図2の「異音有り」)と判断する。
【0045】
一方、電子制御装置50は、変動幅ΔNm2が判定幅ΔNth2を超えていない場合(図2の「ΔNm2<ΔNth2」の場合)には、異音発生箇所の変動が小さくトランスアクスル内で異音が生じていない(図2の「異音無し」)と判断する。なお、所定の判定幅ΔNth2は、異音発生に至るレベルの第2のモータジェネレータ12の回転速度Nm2の変動幅を予め実験的に求めた値に応じて決定し、電子制御装置50の記憶装置に予め記憶しておけばよい。
【0046】
これにより、第2のモータジェネレータ12が回転している状態においても、騒音計や振動計などの新たな専用の装置を設けることなく、エンジントルクの変動に起因してトランスアクスル内で生じる異音を検出することができる。そして、異音を検出した場合には、電子制御装置50が、エンジン2の制御信号、第1のモータジェネレータ11のトルク指令値Tr1、第2のモータジェネレータ12のトルク指令値Tr2、制動装置37の制御信号などを、異音を解消するように変更することによって、適切に異音の低減を図ることが可能となる。
【0047】
特に、モータジェネレータの回転速度の実際の変動に基づいて異音が生じているか否かを判断するため、エンジンの回転変動ばらつき、あるいは部品の寸法ばらつきや経時劣化にも対応して、トランスアクスル内で生じる異音を検出することができる。
【0048】
なお、トランスアクスル内で生じる異音の強弱は、第2のモータジェネレータ12の回転速度Nm2の変化速度の大きさとも相関関係がある。この点を考慮して、電子制御装置50が、第2のモータジェネレータ12の回転速度Nm2の変化速度に基づいて、トランスアクスル内で生じる異音を検出するようにしてもよい。
【0049】
また、第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1と所定の判定幅ΔNth1とを比較することによってもトランスアクスル内で生じる異音を検出することが可能である。ただし、この場合は、第2のモータジェネレータ12のトルク(MG2トルク)も考慮する必要がある。
【0050】
すなわち、図3に示すように、異音発生に至る第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1のレベルは、MG2トルクが大きいほど大きくなる。
【0051】
そこで、図3に示すようなマップを実験的に求めて電子制御装置50の記憶装置に予め記憶しておき、電子制御装置50が、このマップを参照して現在のMG2トルク(たとえば現在のトルク指令値Tr2)に対応する判定幅ΔNth1を算出し、第1のモータジェネレータ11の回転速度Nm1の変動幅ΔNm1が算出した判定幅ΔNth1を越えている場合に、トランスアクスル内で異音が生じていると判断するようにすればよい。ここで、MG2トルクとしては、トルク指令値Tr2に限定されず、たとえば各センサの検出値に基づいて推定したトルク値を用いてもよい。
【0052】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0053】
1 ハイブリッド車両、2 エンジン、3 車輪、4 インプットシャフト、5 アウトプットシャフト、6 デファレンシャル、7 クランクシャフト、8 フライホイール、9 スリーブ、10 ダンパ機構、11 モータジェネレータ(MG1)、12 モータジェネレータ(MG1)、13 ケーシング、14 ステータ(MG1)、15 ロータ(MG1)、16 動力分配機構、17 サンギヤ、18 リングギヤ、19 ピニオンギヤ、20 キャリア、21 環状部材、22 ギヤ、23 パーキングギヤ、24 リングギヤ、25 パーキングボール、26 プラネタリギヤ、27 サンギヤ、28 ピニオンギヤ、29 キャリア、30 ステータ(MG2)、31 ロータ(MG2)、32 ドリブンギヤ、33 ファイナルドライブピニオンギヤ、34 デフケース、35 リングギヤ、36 ドライブシャフト、37 制動装置、39 連結部、50 電子制御装置、51,52 角度センサ。
【特許請求の範囲】
【請求項1】
エンジンと、回転電機と、前記エンジンおよび前記回転電機の少なくともいずれかと車輪との間で動力を伝達する動力伝達部材と、前記動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両の異音検出装置であって、
前記回転電機の回転速度を検出する検出部と、
前記エンジントルクの変動により前記噛み合い機構で異音が発生しているか否かを判断する判断部とを含み、
前記判断部は、前記回転電機の回転速度の変動幅が所定のしきい値を越えているか否かを判断し、前記回転速度の変動幅が前記所定のしきい値を越えている場合に前記噛み合い機構で異音が発生していると判断し、前記回転速度の変動幅が前記所定のしきい値を越えていない場合に前記噛み合い機構で異音が発生していないと判断する、ハイブリッド車両の異音検出装置。
【請求項1】
エンジンと、回転電機と、前記エンジンおよび前記回転電機の少なくともいずれかと車輪との間で動力を伝達する動力伝達部材と、前記動力伝達部材に連結された噛み合い機構とを備えたハイブリッド車両の異音検出装置であって、
前記回転電機の回転速度を検出する検出部と、
前記エンジントルクの変動により前記噛み合い機構で異音が発生しているか否かを判断する判断部とを含み、
前記判断部は、前記回転電機の回転速度の変動幅が所定のしきい値を越えているか否かを判断し、前記回転速度の変動幅が前記所定のしきい値を越えている場合に前記噛み合い機構で異音が発生していると判断し、前記回転速度の変動幅が前記所定のしきい値を越えていない場合に前記噛み合い機構で異音が発生していないと判断する、ハイブリッド車両の異音検出装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−264795(P2010−264795A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−115757(P2009−115757)
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月12日(2009.5.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]