
ハイブリッド車両の駆動制御装置
【課題】特に冷間時における燃費性能を向上させることである。
【解決手段】HV車両10に搭載された駆動制御装置30は、所定のエンジン出力である目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*をとの差分をMG1,MG2によるバッテリ12の充放電量とする運転制御手段31と、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32とを有する。
【解決手段】HV車両10に搭載された駆動制御装置30は、所定のエンジン出力である目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*をとの差分をMG1,MG2によるバッテリ12の充放電量とする運転制御手段31と、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両の駆動制御装置に関する。
【背景技術】
【0002】
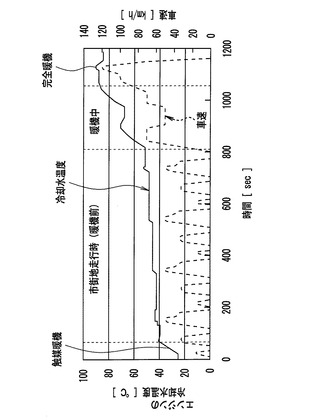
ハイブリッド車両では、エンジンの停止と再始動が繰り返される間欠運転が頻繁に行われる。このため、軽負荷な市街地走行では、エンジンの暖機が完了する完全暖機状態となるまでに長時間を要する。一般的に、エンジンは、低温状態において燃焼が不安定でありフリクションが大きいため、冷間時におけるエンジンの運転制御は燃費性能等の観点から重要である。
【0003】
このような状況に鑑みて、例えば、特許文献1には、低温条件下での始動完爆を検出したときに回転電機により内燃機関のトルク変動を検出し、該トルク変動が大きいときほど回転電機によるファストアイドル運転中の発電量を小さくする動力装置の始動制御装置が開示されている。
【0004】
また、特許文献2には、低温始動時のエンジン負荷を軽減して始動性を向上させ、エンジンが暖機し、その発生トルクが増大した後は発電機の出力電流の制限を解除してバッテリを充電する出力電流制御装置が開示されている。また、特許文献3には、電動機の実出力が低下限界までに至る限界時間を演算する手段と、触媒装置等を含む原動機装置が発電機を駆動可能になるまでの時間を演算する開始時間演算手段と、限界時間が開始時間以下になると原動機装置を作動させる手段とを備えた車両が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000‐145497号公報
【特許文献2】特開平7‐170672号公報
【特許文献3】特開平9‐154204号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、エンジンには、熱効率が最適となる出力が存在する。しかし、上記特許文献には、冷間時におけるエンジンの熱効率を考慮した運転制御については開示されていない。従来の技術は、例えば、完全暖機状態の熱効率に基づいてエンジンの運転を制御しているため、冷間時における燃費向上の観点から未だ改良の余地がある。
【0007】
また、ヒーター要求がある場合など、エンジンの停止頻度が低くなる状況では、冷間時に充電を多く行いバッテリの充電率(SOC:State Of Charge)が高くなると、例えば、完全暖機後にエンジンの運転点を最適に制御することが困難になる。つまり、エンジンの運転状況を想定して冷間時におけるエンジンの運転制御を行うことは、燃費向上の観点から重要である。
【課題を解決するための手段】
【0008】
本発明に係るハイブリッド車両の駆動制御装置は、所定のエンジン出力である目標動作点でエンジンを運転し、要求パワーとエンジンの目標動作点との差分を回転電機によるバッテリの充放電量とする運転制御手段と、予め定めた変更条件に基づいて、完全暖機前におけるエンジンの目標動作点を変更する動作点変更手段とを有することを特徴とする。
当該構成によれば、エンジンの暖機状態やエンジンの運転状況を考慮して、燃費向上の観点から適切な目標動作点を設定することができる。
【0009】
また、動作点変更手段は、エンジンの温度に基づき、当該温度が低いほど低出力側にシフトするように、目標動作点を変更することが好ましい
【0010】
また、動作点変更手段は、エンジンの温度に基づき、各温度でエンジンの熱効率が最大となるように、目標動作点を変更することが好ましい。
当該構成によれば、エンジンの暖機状態に応じて、各暖機状態の熱効率を考慮した適切な目標動作点を設定でき、特に冷間時における燃費性能が向上する。これは、エンジンの暖機状態により熱効率が最適となるエンジン出力が異なることに基づく。
【0011】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態では、目標動作点を低出力側にシフトさせることができる。
エンジンの停止頻度が低くなる運転状態では、通常、充電機会が多くなり放電機会が少なくなるが、当該構成によれば、目標動作点を低出力側にシフトさせることで充電機会を少なくし、又は充電量を減らすことができる。一方、放電機会を増やし、又は放電量を多くすることができる。このため、例えば、エンジンの暖機運転中における必要以上の充電を抑制して充電率の高止まりを抑制できる。
【0012】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第1閾値を超えるときには、充電率に応じて目標動作点を低出力側にシフトさせることができる。
当該構成によれば、エンジンの停止頻度が低くなる運転状態において、バッテリの充電率を考慮することで、例えば、充電率が低い場合には、エンジンの熱効率が最大となる目標動作点でエンジンを運転することができる。一方、充電率が高い場合には、充電率に応じて目標動作点を低出力側にシフトさせ、例えば、充電量を減らし、又は放電量を多くすることができる。
【0013】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第2閾値未満であるときには、充電率に応じて目標動作点を高出力側にシフトさせることができる。
当該構成によれば、エンジンの停止頻度が低くなる運転状態において、充電率が第2閾値未満であるときには、エンジンをより高出力で運転して充電を促進することができる。第2閾値は、例えば、第1閾値以下の充電率に設定され、充電率の下限値〜目標充電率の範囲に設定されることが好適である。
【0014】
なお、エンジンの停止頻度が低くなる運転状態としては、ヒーター要求がある場合、外気温度が所定温度以下の低温である場合、ナビゲーション装置に登録された走行予定経路が高負荷走行経路である場合、及びこれらが組み合された状態などが例示できる。
【発明の効果】
【0015】
本発明に係るハイブリッド車両の駆動制御装置によれば、エンジンの暖機状態に応じた熱効率を考慮してエンジンの運転を制御することにより、特に冷間時における燃費性能が向上する。
【0016】
また、本発明に係るハイブリッド車両の駆動制御装置によれば、エンジンの運転状況を想定して冷間時におけるエンジンの運転制御を行うことで、例えば、冷間時に必要以上の充電がなされて充電率が高止まりすることを抑制できる。このため、完全暖機後において、エンジンの運転点を最適に制御し易くなり、完全暖機後の燃費性能も向上する。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態である駆動制御装置及びハイブリッド車両の概略構成を示すブロック図である。
【図2】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図3】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図4】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図5】ハイブリッド車両の走行状態に応じて、エンジンの冷却水温度が変化する様子を示す図である。
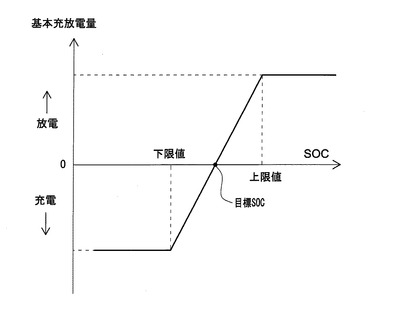
【図6】SOCと、基本充放電量との関係を規定するマップである。
【図7】本発明の実施形態である駆動制御装置による制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0018】
以下、図面を用いて、本発明の実施形態の一例を詳細に説明する。
まず初めに、図1を参照して、本発明の実施形態である駆動制御装置30及びハイブリッド車両10(以下、HV車両10とする)の構成を詳細に説明する。また、図1に加えて、図2〜図6を適宜参照するものとする。
【0019】
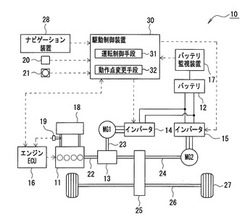
図1は、駆動制御装置30を搭載したHV車両10の概略構成を示す図である。
図1に示すように、HV車両10は、走行用動力源であるエンジン11と、主にジェネレータとして機能する第1モータジェネレータ(以下、MG1とする)と、主に走行用モータとして機能する第2モータジェネレータ(以下、MG2とする)と、MG1及びMG2に電力を供給可能なバッテリ12と、アクセル開度や車速、バッテリ12のSOC等に基づいて、エンジン11、MG1、及びMG2の運転を制御する駆動制御装置30とを備える。
【0020】
また、HV車両10には、エンジン11、MG1、及びMG2との間で動力を分配する動力分配機構13、交流・直流変換装置であるインバータ14,15、駆動制御装置30による制御の下、エンジン11の運転を制御するエンジン電子制御ユニット16(以下、エンジンECU16とする)、バッテリ12のSOC等を監視するバッテリ監視装置17、車両の駆動制御に必要な情報を検出する図示しない各種センサ(例えば、アクセルポジションセンサや車速センサ)等が搭載されている。
【0021】
また、HV車両10には、車内暖房設備に関連する構成として、エンジン11の冷却水を熱媒として利用するヒーターコア18、図示しないブロアモータや各切り替えドア、冷却水温度を検出する水温センサ19、外気温度を検出する外気温センサ20、ヒーターをON/OFF操作するためのヒータースイッチ21等が設けられている。
【0022】
エンジン11は、ガソリン等を燃料とする内燃機関であり、図2〜図4(エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図)に示すように、熱効率が最適となるエンジン出力が存在する。一般的なエンジン11では、低温状態において、燃焼が不安定となりフリクションが大きくなる。そして、熱効率が最適となるエンジン出力は、エンジン11の温度が低いほど低出力側、つまり低負荷側に移行する。また、エンジン11には、冷却水を循環する冷却設備が設けられている。この冷却水は、上記のように、車内暖房設備の熱媒としても利用される。
【0023】
エンジン11は、駆動制御装置30からの制御指令に基づき、エンジンECU16を介して、暖機運転を含む運転状態が制御される。エンジンECU16には、燃料噴射弁やエンジン11の運転状態を検出する各種センサ(例えば、エアフロメータやクランク角センサ、スロットルポジションセンサ、空燃比センサ)が接続されている。また、エンジン11から動力分配機構13へと延伸する出力軸22には、エンジン11の回転数を検出する回転センサが設置されており、その検出情報もエンジンECU16に入力される。また、水温センサ19の検出情報もエンジンECU16に入力される。
【0024】
エンジン11には、排気設備として、排気管の上流側に配置された触媒コンバータ、触媒コンバータの下流側に配置されたサブマフラー、サブマフラーの下流側に配置されたメインマフラー等が設けられる。触媒コンバータは、排気ガス中の有害物質を酸化還元して浄化する装置であり、HC、CO、及びNOxを同時に浄化できる所謂三元触媒を含むことが好適である。サブマフラーには、例えば、エンジン11の冷却水を循環させて冷却水温度の上昇を促進する排気熱回収機構が設けられる。また、排気設備には、例えば、排気ガスの一部を吸気側に再導入する排気再循環(EGR:Exhaust Gas Recirculation)装置が設けられる。
【0025】
なお、HV車両10では、エンジン11の冷却水を熱媒とするヒーターコア18を用いて車内を暖房するため、例えば、ヒーター要求時には、冷却水温度を速やかに上昇させるべく、エンジン11の暖機運転が行われる。暖機運転は、低負荷走行時など車両の走行にエンジン11の動力を必要としない場合にも行われる。このため、ヒーター要求がある場合には、エンジン11の停止頻度が少なくなり、例えば、低負荷走行時の暖機運転によるエンジン11の動力は専らMG1による発電に利用される。エンジン11を暖機運転する状況としては、ヒーター要求時の他に、触媒の温度が低い場合やバッテリ12の温度が低い場合、或いは外気温度が低い場合などが例示できる。
【0026】
動力分配機構13は、例えば、遊星歯車機構によって構成されることが好適である。エンジン11から出力軸22を介して動力分配機構13に入力された動力は、減速機25及び車軸26を介して駆動輪27に伝達される。また、エンジン11の動力の一部又は全部をMG1に伝達できる。
【0027】
MG1は、その回転軸23が動力分配機構13を介してエンジン11の出力軸22と連結されている。或いは、エンジン11の出力軸22とMG1の回転軸23とが共通の軸として構成される。そして、MG1は、主にエンジン11により駆動されるジェネレータとして機能する。MG1は、例えば、永久磁石からなるロータと、U相、V相、W相のステータコイルを含むステータとから構成される三相同期型回転電機である。MG1により発電された三相交流電流は、インバータ14によって直流電流に変換された後、バッテリ12に充電される。また、MG1は、例えば、エンジン11を始動させるセルモータとして機能する。
【0028】
MG2は、主に走行用モータとして機能する。MG2は、MG1と同様に、三相同期型回転電機とすることが好適である。MG2は、バッテリ12から供給される電力により回転駆動される。具体的には、バッテリ12の直流電流がインバータ15によって三相交流電流に変換されMG2に供給される。そして、MG2の出力は、回転軸24が連結された動力分配機構13、減速機25、及び車軸26を介して駆動輪27に伝達される。これにより、HV車両10では、MG2によりエンジン11をアシストする走行又はMG2のみを動力源とするEV走行が可能となる。また、MG2は、回生制動時にジェネレータとして機能する。
【0029】
バッテリ12は、主としてMG2に電力を供給する蓄電装置である。バッテリ12には、ニッケルカドミウム電池、ニッケル水素電池、及びリチウムイオン電池等の二次電池が適用される。バッテリ12には、効率的な使用、劣化防止等の観点から、所定のSOCを上下限値とする管理幅(例えば、20%〜80%)と、充放電の基準となる目標SOC(例えば、60%)が設定されている。
【0030】
バッテリ12のSOC制御は、駆動制御装置30により実行される。駆動制御装置30は、例えば、バッテリ監視装置17からSOC情報を取得して、バッテリ12の過充電又は過放電が発生しないように、MG1、MG2、及びエンジン11の動作を制御する。なお、バッテリ監視装置17は、例えば、電圧計、電流計、温度計等を用いて、SOCを含むバッテリ12の状態を監視している。SOCは、充放電電流の積算値に基づいて演算できる。
【0031】
インバータ14,15は、上記のように、交流・直流変換装置である。インバータ14は、駆動制御装置30の制御の下、例えば、MG1で発電された交流電流を半導体スイッチング素子のON/OFF操作により直流電流に変換してバッテリ12に充電する機能を有する。また、インバータ14は、要求される発電量に応じた発電機トルクを発生させるために、バッテリ12の直流電流を交流電流に変換してMG1に供給する機能を有する。インバータ15は、駆動制御装置30の制御の下、例えば、バッテリ12の直流電流を交流電流に変換してMG2に供給する機能を有する。
【0032】
駆動制御装置30は、HV車両10の駆動力を制御する装置であって、所謂ハイブリッドECU、或いはその一部として構成することができる。駆動制御装置30は、各センサや各ECUからの情報や信号に基づいて、MG1、MG2、及びエンジン11の動作を統合的に制御する。なお、駆動制御装置30及び各ECUは、CPU、入出力ポート、メモリ等を備えるマイクロコンピュータで構成され、駆動制御装置30の各機能は、ソフトウェアを実行することで実現できる。
【0033】
駆動制御装置30は、所定のエンジン出力である目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*との差分をMG1、MG2によるバッテリ12の充放電量とする運転制御手段31を有する。運転制御手段31は、バッテリ12のSOCが上下限値を超えない範囲において、目標動作点Pe*でエンジン11を運転することが好適である。
【0034】
詳しくは後述するが、運転制御手段31は、完全暖機前、即ち冷間時において、動作点変更手段32により目標動作点Pe*が変更されたときには、変更された目標動作点Pe*でエンジン11を運転する。以下、必要により、変更された目標動作点Pe*を修正目標動作点Pe*と称し、修正目標動作点Pe*をさらに変更したものを追加修正目標動作点Pe*と称する。
【0035】
目標動作点Pe*は、例えば、エンジン11の完全暖機状態において、エンジン11の熱効率が最大となるエンジン出力に設定される。また、要求パワーPr*とは、例えば、アクセル開度及び車速から導出される走行要求パワーに、SOCから導出される基本充放電量を加算したパワー(車両要求パワー)である。
【0036】
運転制御手段31は、例えば、アクセル開度、車速、バッテリ12のSOC、バッテリ12の温度やSOCから設定される入出力制限など、車両の駆動制御に必要なデータを取得して、運転モードを設定すると共に、エンジン11並びにMG1、MG2の運転状態を制御する。運転モードとしては、例えば、バッテリ12のSOCが上下限値を超えない範囲において、目標動作点Pe*でエンジン11を運転し、目標動作点Pe*と車両の要求パワーPr*との差分をMG1、MG2によるバッテリ12の充放電量とする通常運転モード、SOCが下限値を下回るときに選択される強制充電モード、SOCが上限値を超えるときに選択される強制放電モード、エンジン11を停止してMG2のみから動力を供給するEV走行モードがある。
【0037】
運転制御手段31は、SOCに基づいて、基本充放電量を設定することができる。基本充放電量は、バッテリ監視装置17から取得したSOCが、予め定めた目標SOC(例えば、60%)に近づくように設定される。運転制御手段31は、図6に例示するSOCと基本充放電量との関係を規定したマップを用いて、SOCから基本充放電量を設定することが好適である。このマップは、例えば、目標SOCのときの基本充放電量を0として、目標SOCから離れるほど基本充放電量を大きくする。また、SOCの上下限値を超える領域では、一定の基本充放電量を規定する。
【0038】
また、運転制御手段31は、SOC及び車速に基づいて、充放電上下限量を設定することができる。充放電上下限量は、例えば、高車速領域では低車速領域よりも充電量を抑え、低車速領域では高車速領域よりも放電量を抑えるように設定される。例えば、SOCと、車速と、充放電上下限量との関係を規定するマップを用いて、SOC及び車速から充放電上下限量を設定できる。
【0039】
また、運転制御手段31は、アクセル開度及び車速に基づいて、要求パワーPr*を設定することができる。例えば、要求トルク設定マップを用いて、アクセル開度及び車速から走行要求トルクを導出し、動力分配機構13から車軸26に繋がる出力軸の回転数を乗じて走行要求パワーを導出する。そして、走行要求パワーに基本充放電量を加算して要求パワーPr*を算出する。
【0040】
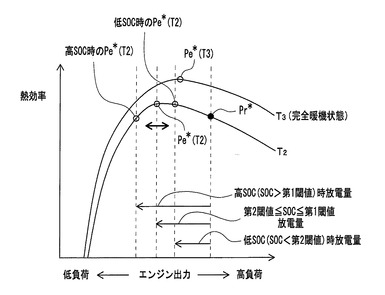
運転制御手段31は、上記のように、バッテリ12のSOCが上下限値を超えない範囲において、エンジン11を目標動作点Pe*で運転する。例えば、図2及び図3に示すように、要求パワーPr*がエンジン11の目標動作点Pe*より小さい場合には、過剰な出力分をMG1により電力変換してバッテリ12を充電する。一方、図4に示すように、車両要求パワーPr*がエンジン11の目標動作点Pe*より大きい場合には、不足の出力分をMG2でアシストする。即ち、バッテリ12の放電がなされる。つまり、要求パワーPr*と目標動作点Pe*との差が充放電量となるため、運転制御手段31は、要求パワーPr*に基づいて充放電量を算出することができる。運転制御手段31は、充放電量の算出値が充放電上下限量を超えないように、上下限ガード処理を行うことが好ましい。
【0041】
駆動制御装置30は、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32を有する。
【0042】
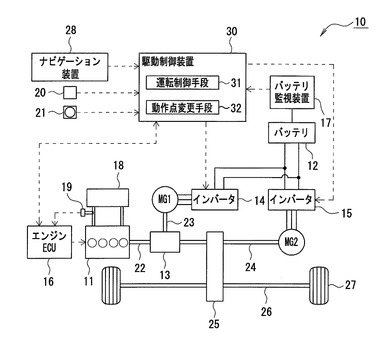
図2に示すように、動作点変更手段32は、エンジン11の温度に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更することが好適である。なお、図2のT1,T2,T3は、エンジン11の温度であり、T1<T2<T3である。つまり、本実施形態では、完全暖機前と完全暖機後とで目標動作点Pe*を一定の値とせず、エンジン11の暖機状態に応じて変化する変動値とすることが好適である。その結果として、要求パワーPr*が同じであっても、暖機レベルにより充放電量が異なる。
【0043】
エンジン11の温度は、例えば、排気ガスの温度やエンジンオイルの温度に基づいて判定してもよいが、エンジン11の冷却水温度に基づいて判定することが好適である。動作点変更手段32は、例えば、エンジンECU16を介して水温センサ19の検出情報を取得することができる。以下では、冷却水温度に基づいてエンジン11の温度を判定するものとして説明する。
【0044】
動作点変更手段32は、冷却水温度に基づき、冷却水温度が低いほど低出力側にシフトするように、目標動作点Pe*を変更することが好ましい。つまり、完全暖機前における修正目標動作点Pe*を完全暖機状態における目標動作点Pe*よりも低負荷側に設定し(例えば、Pe*(T2)<Pe*(T3))、冷却水温度が低くなるほど修正目標動作点Pe*を低負荷側にシフトさせることが好ましい(例えば、Pe*(T1)<Pe*(T2))。その結果として、冷却水温度が低くなるほど、充電量が少なくなり、又は放電量が多くなる。
【0045】
動作点変更手段32は、各暖機状態において、エンジン11の熱効率が最大となるように、目標動作点Pe*を変更することが好ましい。上記のように、エンジン11の暖機状態により熱効率が最大となるエンジン出力が異なるため、動作点変更手段32は、修正目標動作点Pe*が各暖機状態で熱効率が最大となるエンジン出力に設定されるように目標動作点Pe*を変更する。これにより、エンジン11の暖機状態が異なる場合でも熱効率の高い条件下でエンジン11を運転することができ、特に冷間時における燃費性能が向上する。
【0046】
図2に示す例では、エンジン11の温度が低いほど、熱効率が最大となるエンジン出力が低負荷側にシフトする。ゆえに、各暖機状態でエンジン11の熱効率が最大となるように目標動作点Pe*を変更すると、冷却水温度が低いほど修正目標動作点Pe*が低負荷側にシフトすることになる。一方、冷却水温度が低いほど熱効率が最大となるエンジン出力が高負荷側にシフトする場合には、冷却水温度が低いほど修正目標動作点Pe*が高出力側にシフトするように目標動作点Pe*を変更してもよい。このようなエンジン11としては、例えば、低温側でフリクションが低くなるエンジンオイルを用いたものが例示できる。
【0047】
さらに、動作点変更手段32は、エンジン11の停止頻度が低い所定の運転状態において、目標動作点Pe*を低出力側にシフトさせることが好ましい。
【0048】
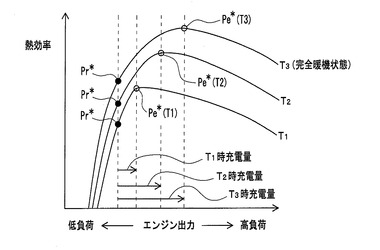
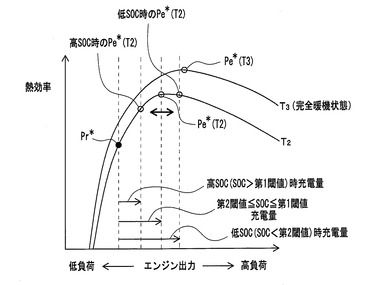
図3及び図4に示すように、動作点変更手段32は、各冷却水温度での修正目標動作点Pe*において、エンジン11の熱効率が最大となるように目標動作点Pe*を変更した後、さらにエンジン11の運転状況を想定して修正目標動作点Pe*を変更することがより好ましい。一方、動作点変更手段32は、例えば、エンジン11の冷却水温度に基づいて目標動作点Pe*を変更せず、HV車両10の運転状態がエンジン11の停止頻度が低い運転状態であることを条件として、目標動作点Pe*を変更してもよい。
【0049】
エンジン11の停止頻度が低い所定の運転状態には、エンジン11の停止頻度が低くなる可能性が高い状態が含まれる。所定の運転状態としては、例えば、ヒーター要求がある場合、外気温度が所定温度以下の低温である場合、ナビゲーション装置28に登録された走行予定経路が予め設定された高負荷走行経路である場合、及びこれらの条件が複数組み合された場合などが例示できる。動作点変更手段32は、例えば、これらの状態をエンジン11の停止頻度が低い所定の運転状態として記憶しておき、HV車両10の運転状態が予め記憶した運転状態であると判断したときに、目標動作点Pe*を変更することができる。
【0050】
動作点変更手段32は、例えば、ヒーター要求がある場合には、修正目標動作点Pe*をさらに低出力側にシフトさせる。動作点変更手段32は、ヒータースイッチ21のON操作信号を取得し、当該信号を取得したときに修正目標動作点Pe*を変更することができる。或いは、動作点変更手段32は、外気温度が所定温度以下の低温である場合に、又はヒーター要求があり且つ外気温度が所定温度以下である場合に、修正目標動作点Pe*を、さらに低出力側にシフトさせる。動作点変更手段32は、外気温センサ20から外気温度を取得して、当該外気温度と所定温度とを比較し、外気温度<所定温度のときに修正目標動作点Pe*を変更することができる。
【0051】
所定温度は、例えば、ヒーター要求がなされることが想定される温度として予め定められた温度(例えば、10℃)に設定することができる。或いは、ユーザーがヒーター要求する頻度が高くなる外気温度を記憶しておき、当該温度を所定温度に設定することもできる。なお、外気温度が低い場合には、エンジン11が暖機され難く、一旦完全暖機状態になっても再びエンジン11が冷え易い。このため、暖機運転の頻度が高くなり、特にエンジン11の停止頻度が低くなり易い。
【0052】
また、動作点変更手段32は、例えば、ヒーター要求があり且つナビゲーション装置28に登録された走行予定経路が予め設定された高負荷走行経路である場合に、修正目標動作点Pe*をさらに低出力側にシフトさせる。動作点変更手段32は、ヒータースイッチ21の操作信号と、ナビゲーション装置28の走行予定経路の登録情報とを取得して、修正目標動作点Pe*を変更するか否かを判定することができる。高負荷走行経路としては、高速での走行が想定される高速道路や勾配の大きな登坂道路などが例示できる。
【0053】
動作点変更手段32は、ヒーター要求がある場合など、エンジン11の停止頻度が低くなる運転状態のときには、例えば、運転状態に対応して予め定めた一定量だけ目標動作点Pe*を低出力側にシフトさせることができる。より好ましくは、エンジン11の停止頻度が低くなる運転状態において、さらにバッテリ12のSOCを考慮して、目標動作点Pe*のシフト量を変更する。
【0054】
動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い所定の運転状態であり、且つバッテリ12のSOCが第1閾値を超えるときには、SOCに応じて目標動作点Pe*を低出力側にシフトさせる。第1閾値としては、目標SOCと下限値との間(例えば、20%〜60%)に設定することが好ましく、目標SOCと同じ値(例えば、60%)とすることができる。動作点変更手段32は、SOCが第1閾値を超えるときに、SOCが高くなるほど目標動作点Pe*のシフト量を大きくすることができる。例えば、SOCとシフト量とを規定したマップを用いて、目標動作点Pe*を変更することができる。
【0055】
一方、動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い所定の運転状態であり、且つバッテリ12のSOCが第2閾値未満であるときには、SOCに応じて目標動作点Pe*を高出力側にシフトさせることができる。第2閾値としては、第1閾値と同様に、目標SOCと下限値との間(例えば、20%〜60%)に設定することが好ましい。第2閾値は、完全暖機前において充電機会を抑制する観点から、下限値の近傍に設定できる。或いは、第1閾値と第2閾値とを同じ値に設定してもよい。
【0056】
動作点変更手段32は、例えば、ヒーター要求がある場合に、目標SOCを境界として目標動作点Pe*を変更する。具体的には、ヒーター要求があり、SOCが目標SOCを超えたときに、SOCに基づいて目標動作点Pe*を低出力側にシフトさせ、ヒーター要求があり、SOCが目標SOC未満であるときに、SOCに基づいて目標動作点Pe*を高出力側にシフトさせる。
【0057】
図3及び図4に示す例(冷却水温度がT2の場合を例示)では、第1閾値を第2閾値よりも大きな値に設定している。例えば、ヒーター要求がある場合において、SOCが第1閾値を超える高SOCのときには、修正目標動作点Pe*がさらに低負荷側にシフトし、修正目標動作点Pe*>追加修正目標動作点Pe*となる。一方、SOCが第2閾値未満の低SOCのときには、修正目標動作点Pe*が高負荷側にシフトし、修正目標動作点Pe*<追加修正目標動作点Pe*となる。そして、SOCが第2閾値以上第1閾値以下のときには、修正目標動作点Pe*は変更されない。その結果、SOCが第2閾値以上第1閾値以下の場合と比較して、高SOC時の充電量は減少し、低SOC時の充電量は増加する。一方、SOCが第2閾値以上第1閾値以下の場合と比較して、高SOC時の放電量は増加し、低SOC時の放電量は減少する。
【0058】
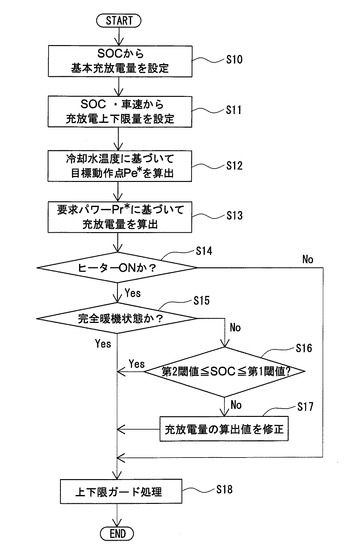
次に、図7を参照して、駆動制御装置30による制御の一例を説明する。
なお、図7では、SOCが上下限値を超えない範囲にあり、通常運転モードが選択される運転状態を示している。即ち、HV車両10の走行にエンジン11の動力が必要な運転状態であり、エンジン11が目標動作点Pe*で運転される状態である。
【0059】
まず、SOCから基本充放電量を設定する(S10)。基本充放電量は、バッテリ監視装置17から取得したSOCに基づいて、図6に例示するマップを用いて設定することができる。この手順は、運転制御手段31の機能により実行される。
【0060】
続いて、SOC及び車速から充放電上下限量を設定する(S11)。充放電上下限量は、SOC及び車速センサから取得した車速に基づいて、SOCと、車速と、充放電上下限量との関係を規定するマップを用いて設定することができ、上下限ガード処理に使用される。この手順は、運転制御手段31の機能により実行される。
【0061】
続いて、エンジン11の冷却水温度に基づいて、目標動作点Pe*を算出する(S12)。つまり、エンジン11の冷却水温度に応じて目標動作点Pe*を変更する。目標動作点Pe*は、上記のように、冷却水温度と目標動作点Pe*との関係を規定したマップを用いて、各冷却水温度条件でエンジン11の熱効率が最大となるように変更される。この手順は、動作点変更手段32の機能により実行される。
【0062】
続いて、要求パワーPr*に基づいて、充放電量を算出する(S13)。要求パワーPr*は、アクセル開度及び車速に基づいて導出した走行要求パワーに基本充放電量を加算することで算出され、充放電量は、目標動作点Pe*から要求パワーPr*を差し引くことで算出される。この手順は、運転制御手段31の機能により実行される。
【0063】
続いて、ヒーター要求があるか否かを判定する(S14)。ヒーター要求の有無は、ヒータースイッチ21のON操作信号の有無により判定できる。この手順は、動作点変更手段32の機能により実行される。動作点変更手段32は、ヒーター要求以外にも、HV車両10の運転状態がエンジン11の停止頻度が低くなる又は低くなる可能性が高い運転状態であるか否かを判定することができる。
【0064】
S14でヒーター要求があると判定されたときには、エンジン11が完全暖機状態であるか否かを判定する(S15)。一方、S14でヒーター要求がないと判定されたときには、S12で変更された目標動作点Pe*を維持し充放電量の算出値を変更しないため、上下限ガード処理(S18)に進む。この手順は、動作点変更手段32の機能により実行される。
【0065】
S15で完全暖機状態ではないと判定されたときには、SOCの判定を行う(S16)。一方、S15で完全暖機状態であると判定されたときには、変更された目標動作点Pe*を維持し充放電量の算出値を変更しないため、上下限ガード処理(S18)に進む。この手順では、バッテリ監視装置17から取得したSOCと、2つの閾値とを比較して、SOCが第2閾値以上第1閾値以下であるか否かを判定する。この手順は、動作点変更手段32の機能により実行される。
【0066】
S16でSOCが第2閾値以上第1閾値以下ではないと判定された場合、つまりSOCが第1閾値を超える場合又はSOCが第2閾値未満である場合には、目標動作点Pe*をSOCに応じて変更することで充放電量の算出値を修正する(S17)。この手順は、動作点変更手段32の機能により実行される。
【0067】
最後に、充放電量がS11で設定された充放電上下限量を超えないように上下限ガード処理を行う(S18)。
【0068】
以上のように、駆動制御装置30は、目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*をとの差分をMG1,MG2によるバッテリ12の充放電量とする運転制御手段31と、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32とを有する。
【0069】
動作点変更手段32は、例えば、エンジン11の温度に基づき、各温度でエンジン11の熱効率が最大となるように目標動作点Pe*を変更する。これにより、各暖機状態における熱効率を考慮した目標動作点Pe*を設定でき、エンジン11をより効率良く運転できる。したがって、特に冷間時における燃費性能が向上する。
【0070】
動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い運転状態では、SOCを考慮した上で、SOCに応じて目標動作点Pe*を変更する。これにより、エンジン11の停止頻度が低い運転状態では、例えば、目標動作点Pe*を低出力側にシフトさせることで充電機会を少なくし、又は充電量を減らすことができる。一方、放電機会を増やし、又は放電量を多くすることができる。このとき、SOCが低い場合など、SOCの高止まりが生じる可能性が低い状態では、熱効率が最大となるエンジン出力でエンジン11を運転することができる。
【0071】
なお、上記実施形態は、本発明の目的を損なわない範囲で設計変更できる。
【符号の説明】
【0072】
10 ハイブリッド車両(HV車両)、MG1 第1モータジェネレータ、MG2 第2モータジェネレータ、11 エンジン、12 バッテリ、13 動力分配機構、14,15 インバータ、16 エンジン電子制御ユニット(エンジンECU)、17 バッテリ監視装置、18 ヒーターコア、19 水温センサ、20 外気温センサ、21 ヒータースイッチ、22 出力軸、23,24 回転軸、25 減速機、26 車軸、27 駆動輪、28 ナビゲーション装置、30 駆動制御装置、31 運転制御手段、32 動作点変更手段。
【技術分野】
【0001】
本発明は、ハイブリッド車両の駆動制御装置に関する。
【背景技術】
【0002】
ハイブリッド車両では、エンジンの停止と再始動が繰り返される間欠運転が頻繁に行われる。このため、軽負荷な市街地走行では、エンジンの暖機が完了する完全暖機状態となるまでに長時間を要する。一般的に、エンジンは、低温状態において燃焼が不安定でありフリクションが大きいため、冷間時におけるエンジンの運転制御は燃費性能等の観点から重要である。
【0003】
このような状況に鑑みて、例えば、特許文献1には、低温条件下での始動完爆を検出したときに回転電機により内燃機関のトルク変動を検出し、該トルク変動が大きいときほど回転電機によるファストアイドル運転中の発電量を小さくする動力装置の始動制御装置が開示されている。
【0004】
また、特許文献2には、低温始動時のエンジン負荷を軽減して始動性を向上させ、エンジンが暖機し、その発生トルクが増大した後は発電機の出力電流の制限を解除してバッテリを充電する出力電流制御装置が開示されている。また、特許文献3には、電動機の実出力が低下限界までに至る限界時間を演算する手段と、触媒装置等を含む原動機装置が発電機を駆動可能になるまでの時間を演算する開始時間演算手段と、限界時間が開始時間以下になると原動機装置を作動させる手段とを備えた車両が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000‐145497号公報
【特許文献2】特開平7‐170672号公報
【特許文献3】特開平9‐154204号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、エンジンには、熱効率が最適となる出力が存在する。しかし、上記特許文献には、冷間時におけるエンジンの熱効率を考慮した運転制御については開示されていない。従来の技術は、例えば、完全暖機状態の熱効率に基づいてエンジンの運転を制御しているため、冷間時における燃費向上の観点から未だ改良の余地がある。
【0007】
また、ヒーター要求がある場合など、エンジンの停止頻度が低くなる状況では、冷間時に充電を多く行いバッテリの充電率(SOC:State Of Charge)が高くなると、例えば、完全暖機後にエンジンの運転点を最適に制御することが困難になる。つまり、エンジンの運転状況を想定して冷間時におけるエンジンの運転制御を行うことは、燃費向上の観点から重要である。
【課題を解決するための手段】
【0008】
本発明に係るハイブリッド車両の駆動制御装置は、所定のエンジン出力である目標動作点でエンジンを運転し、要求パワーとエンジンの目標動作点との差分を回転電機によるバッテリの充放電量とする運転制御手段と、予め定めた変更条件に基づいて、完全暖機前におけるエンジンの目標動作点を変更する動作点変更手段とを有することを特徴とする。
当該構成によれば、エンジンの暖機状態やエンジンの運転状況を考慮して、燃費向上の観点から適切な目標動作点を設定することができる。
【0009】
また、動作点変更手段は、エンジンの温度に基づき、当該温度が低いほど低出力側にシフトするように、目標動作点を変更することが好ましい
【0010】
また、動作点変更手段は、エンジンの温度に基づき、各温度でエンジンの熱効率が最大となるように、目標動作点を変更することが好ましい。
当該構成によれば、エンジンの暖機状態に応じて、各暖機状態の熱効率を考慮した適切な目標動作点を設定でき、特に冷間時における燃費性能が向上する。これは、エンジンの暖機状態により熱効率が最適となるエンジン出力が異なることに基づく。
【0011】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態では、目標動作点を低出力側にシフトさせることができる。
エンジンの停止頻度が低くなる運転状態では、通常、充電機会が多くなり放電機会が少なくなるが、当該構成によれば、目標動作点を低出力側にシフトさせることで充電機会を少なくし、又は充電量を減らすことができる。一方、放電機会を増やし、又は放電量を多くすることができる。このため、例えば、エンジンの暖機運転中における必要以上の充電を抑制して充電率の高止まりを抑制できる。
【0012】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第1閾値を超えるときには、充電率に応じて目標動作点を低出力側にシフトさせることができる。
当該構成によれば、エンジンの停止頻度が低くなる運転状態において、バッテリの充電率を考慮することで、例えば、充電率が低い場合には、エンジンの熱効率が最大となる目標動作点でエンジンを運転することができる。一方、充電率が高い場合には、充電率に応じて目標動作点を低出力側にシフトさせ、例えば、充電量を減らし、又は放電量を多くすることができる。
【0013】
また、動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第2閾値未満であるときには、充電率に応じて目標動作点を高出力側にシフトさせることができる。
当該構成によれば、エンジンの停止頻度が低くなる運転状態において、充電率が第2閾値未満であるときには、エンジンをより高出力で運転して充電を促進することができる。第2閾値は、例えば、第1閾値以下の充電率に設定され、充電率の下限値〜目標充電率の範囲に設定されることが好適である。
【0014】
なお、エンジンの停止頻度が低くなる運転状態としては、ヒーター要求がある場合、外気温度が所定温度以下の低温である場合、ナビゲーション装置に登録された走行予定経路が高負荷走行経路である場合、及びこれらが組み合された状態などが例示できる。
【発明の効果】
【0015】
本発明に係るハイブリッド車両の駆動制御装置によれば、エンジンの暖機状態に応じた熱効率を考慮してエンジンの運転を制御することにより、特に冷間時における燃費性能が向上する。
【0016】
また、本発明に係るハイブリッド車両の駆動制御装置によれば、エンジンの運転状況を想定して冷間時におけるエンジンの運転制御を行うことで、例えば、冷間時に必要以上の充電がなされて充電率が高止まりすることを抑制できる。このため、完全暖機後において、エンジンの運転点を最適に制御し易くなり、完全暖機後の燃費性能も向上する。
【図面の簡単な説明】
【0017】
【図1】本発明の実施形態である駆動制御装置及びハイブリッド車両の概略構成を示すブロック図である。
【図2】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図3】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図4】本発明の実施形態である駆動制御装置において、エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図である。
【図5】ハイブリッド車両の走行状態に応じて、エンジンの冷却水温度が変化する様子を示す図である。
【図6】SOCと、基本充放電量との関係を規定するマップである。
【図7】本発明の実施形態である駆動制御装置による制御の一例を示すフローチャートである。
【発明を実施するための形態】
【0018】
以下、図面を用いて、本発明の実施形態の一例を詳細に説明する。
まず初めに、図1を参照して、本発明の実施形態である駆動制御装置30及びハイブリッド車両10(以下、HV車両10とする)の構成を詳細に説明する。また、図1に加えて、図2〜図6を適宜参照するものとする。
【0019】
図1は、駆動制御装置30を搭載したHV車両10の概略構成を示す図である。
図1に示すように、HV車両10は、走行用動力源であるエンジン11と、主にジェネレータとして機能する第1モータジェネレータ(以下、MG1とする)と、主に走行用モータとして機能する第2モータジェネレータ(以下、MG2とする)と、MG1及びMG2に電力を供給可能なバッテリ12と、アクセル開度や車速、バッテリ12のSOC等に基づいて、エンジン11、MG1、及びMG2の運転を制御する駆動制御装置30とを備える。
【0020】
また、HV車両10には、エンジン11、MG1、及びMG2との間で動力を分配する動力分配機構13、交流・直流変換装置であるインバータ14,15、駆動制御装置30による制御の下、エンジン11の運転を制御するエンジン電子制御ユニット16(以下、エンジンECU16とする)、バッテリ12のSOC等を監視するバッテリ監視装置17、車両の駆動制御に必要な情報を検出する図示しない各種センサ(例えば、アクセルポジションセンサや車速センサ)等が搭載されている。
【0021】
また、HV車両10には、車内暖房設備に関連する構成として、エンジン11の冷却水を熱媒として利用するヒーターコア18、図示しないブロアモータや各切り替えドア、冷却水温度を検出する水温センサ19、外気温度を検出する外気温センサ20、ヒーターをON/OFF操作するためのヒータースイッチ21等が設けられている。
【0022】
エンジン11は、ガソリン等を燃料とする内燃機関であり、図2〜図4(エンジンの熱効率と、エンジン出力及び目標動作点との関係を示す図)に示すように、熱効率が最適となるエンジン出力が存在する。一般的なエンジン11では、低温状態において、燃焼が不安定となりフリクションが大きくなる。そして、熱効率が最適となるエンジン出力は、エンジン11の温度が低いほど低出力側、つまり低負荷側に移行する。また、エンジン11には、冷却水を循環する冷却設備が設けられている。この冷却水は、上記のように、車内暖房設備の熱媒としても利用される。
【0023】
エンジン11は、駆動制御装置30からの制御指令に基づき、エンジンECU16を介して、暖機運転を含む運転状態が制御される。エンジンECU16には、燃料噴射弁やエンジン11の運転状態を検出する各種センサ(例えば、エアフロメータやクランク角センサ、スロットルポジションセンサ、空燃比センサ)が接続されている。また、エンジン11から動力分配機構13へと延伸する出力軸22には、エンジン11の回転数を検出する回転センサが設置されており、その検出情報もエンジンECU16に入力される。また、水温センサ19の検出情報もエンジンECU16に入力される。
【0024】
エンジン11には、排気設備として、排気管の上流側に配置された触媒コンバータ、触媒コンバータの下流側に配置されたサブマフラー、サブマフラーの下流側に配置されたメインマフラー等が設けられる。触媒コンバータは、排気ガス中の有害物質を酸化還元して浄化する装置であり、HC、CO、及びNOxを同時に浄化できる所謂三元触媒を含むことが好適である。サブマフラーには、例えば、エンジン11の冷却水を循環させて冷却水温度の上昇を促進する排気熱回収機構が設けられる。また、排気設備には、例えば、排気ガスの一部を吸気側に再導入する排気再循環(EGR:Exhaust Gas Recirculation)装置が設けられる。
【0025】
なお、HV車両10では、エンジン11の冷却水を熱媒とするヒーターコア18を用いて車内を暖房するため、例えば、ヒーター要求時には、冷却水温度を速やかに上昇させるべく、エンジン11の暖機運転が行われる。暖機運転は、低負荷走行時など車両の走行にエンジン11の動力を必要としない場合にも行われる。このため、ヒーター要求がある場合には、エンジン11の停止頻度が少なくなり、例えば、低負荷走行時の暖機運転によるエンジン11の動力は専らMG1による発電に利用される。エンジン11を暖機運転する状況としては、ヒーター要求時の他に、触媒の温度が低い場合やバッテリ12の温度が低い場合、或いは外気温度が低い場合などが例示できる。
【0026】
動力分配機構13は、例えば、遊星歯車機構によって構成されることが好適である。エンジン11から出力軸22を介して動力分配機構13に入力された動力は、減速機25及び車軸26を介して駆動輪27に伝達される。また、エンジン11の動力の一部又は全部をMG1に伝達できる。
【0027】
MG1は、その回転軸23が動力分配機構13を介してエンジン11の出力軸22と連結されている。或いは、エンジン11の出力軸22とMG1の回転軸23とが共通の軸として構成される。そして、MG1は、主にエンジン11により駆動されるジェネレータとして機能する。MG1は、例えば、永久磁石からなるロータと、U相、V相、W相のステータコイルを含むステータとから構成される三相同期型回転電機である。MG1により発電された三相交流電流は、インバータ14によって直流電流に変換された後、バッテリ12に充電される。また、MG1は、例えば、エンジン11を始動させるセルモータとして機能する。
【0028】
MG2は、主に走行用モータとして機能する。MG2は、MG1と同様に、三相同期型回転電機とすることが好適である。MG2は、バッテリ12から供給される電力により回転駆動される。具体的には、バッテリ12の直流電流がインバータ15によって三相交流電流に変換されMG2に供給される。そして、MG2の出力は、回転軸24が連結された動力分配機構13、減速機25、及び車軸26を介して駆動輪27に伝達される。これにより、HV車両10では、MG2によりエンジン11をアシストする走行又はMG2のみを動力源とするEV走行が可能となる。また、MG2は、回生制動時にジェネレータとして機能する。
【0029】
バッテリ12は、主としてMG2に電力を供給する蓄電装置である。バッテリ12には、ニッケルカドミウム電池、ニッケル水素電池、及びリチウムイオン電池等の二次電池が適用される。バッテリ12には、効率的な使用、劣化防止等の観点から、所定のSOCを上下限値とする管理幅(例えば、20%〜80%)と、充放電の基準となる目標SOC(例えば、60%)が設定されている。
【0030】
バッテリ12のSOC制御は、駆動制御装置30により実行される。駆動制御装置30は、例えば、バッテリ監視装置17からSOC情報を取得して、バッテリ12の過充電又は過放電が発生しないように、MG1、MG2、及びエンジン11の動作を制御する。なお、バッテリ監視装置17は、例えば、電圧計、電流計、温度計等を用いて、SOCを含むバッテリ12の状態を監視している。SOCは、充放電電流の積算値に基づいて演算できる。
【0031】
インバータ14,15は、上記のように、交流・直流変換装置である。インバータ14は、駆動制御装置30の制御の下、例えば、MG1で発電された交流電流を半導体スイッチング素子のON/OFF操作により直流電流に変換してバッテリ12に充電する機能を有する。また、インバータ14は、要求される発電量に応じた発電機トルクを発生させるために、バッテリ12の直流電流を交流電流に変換してMG1に供給する機能を有する。インバータ15は、駆動制御装置30の制御の下、例えば、バッテリ12の直流電流を交流電流に変換してMG2に供給する機能を有する。
【0032】
駆動制御装置30は、HV車両10の駆動力を制御する装置であって、所謂ハイブリッドECU、或いはその一部として構成することができる。駆動制御装置30は、各センサや各ECUからの情報や信号に基づいて、MG1、MG2、及びエンジン11の動作を統合的に制御する。なお、駆動制御装置30及び各ECUは、CPU、入出力ポート、メモリ等を備えるマイクロコンピュータで構成され、駆動制御装置30の各機能は、ソフトウェアを実行することで実現できる。
【0033】
駆動制御装置30は、所定のエンジン出力である目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*との差分をMG1、MG2によるバッテリ12の充放電量とする運転制御手段31を有する。運転制御手段31は、バッテリ12のSOCが上下限値を超えない範囲において、目標動作点Pe*でエンジン11を運転することが好適である。
【0034】
詳しくは後述するが、運転制御手段31は、完全暖機前、即ち冷間時において、動作点変更手段32により目標動作点Pe*が変更されたときには、変更された目標動作点Pe*でエンジン11を運転する。以下、必要により、変更された目標動作点Pe*を修正目標動作点Pe*と称し、修正目標動作点Pe*をさらに変更したものを追加修正目標動作点Pe*と称する。
【0035】
目標動作点Pe*は、例えば、エンジン11の完全暖機状態において、エンジン11の熱効率が最大となるエンジン出力に設定される。また、要求パワーPr*とは、例えば、アクセル開度及び車速から導出される走行要求パワーに、SOCから導出される基本充放電量を加算したパワー(車両要求パワー)である。
【0036】
運転制御手段31は、例えば、アクセル開度、車速、バッテリ12のSOC、バッテリ12の温度やSOCから設定される入出力制限など、車両の駆動制御に必要なデータを取得して、運転モードを設定すると共に、エンジン11並びにMG1、MG2の運転状態を制御する。運転モードとしては、例えば、バッテリ12のSOCが上下限値を超えない範囲において、目標動作点Pe*でエンジン11を運転し、目標動作点Pe*と車両の要求パワーPr*との差分をMG1、MG2によるバッテリ12の充放電量とする通常運転モード、SOCが下限値を下回るときに選択される強制充電モード、SOCが上限値を超えるときに選択される強制放電モード、エンジン11を停止してMG2のみから動力を供給するEV走行モードがある。
【0037】
運転制御手段31は、SOCに基づいて、基本充放電量を設定することができる。基本充放電量は、バッテリ監視装置17から取得したSOCが、予め定めた目標SOC(例えば、60%)に近づくように設定される。運転制御手段31は、図6に例示するSOCと基本充放電量との関係を規定したマップを用いて、SOCから基本充放電量を設定することが好適である。このマップは、例えば、目標SOCのときの基本充放電量を0として、目標SOCから離れるほど基本充放電量を大きくする。また、SOCの上下限値を超える領域では、一定の基本充放電量を規定する。
【0038】
また、運転制御手段31は、SOC及び車速に基づいて、充放電上下限量を設定することができる。充放電上下限量は、例えば、高車速領域では低車速領域よりも充電量を抑え、低車速領域では高車速領域よりも放電量を抑えるように設定される。例えば、SOCと、車速と、充放電上下限量との関係を規定するマップを用いて、SOC及び車速から充放電上下限量を設定できる。
【0039】
また、運転制御手段31は、アクセル開度及び車速に基づいて、要求パワーPr*を設定することができる。例えば、要求トルク設定マップを用いて、アクセル開度及び車速から走行要求トルクを導出し、動力分配機構13から車軸26に繋がる出力軸の回転数を乗じて走行要求パワーを導出する。そして、走行要求パワーに基本充放電量を加算して要求パワーPr*を算出する。
【0040】
運転制御手段31は、上記のように、バッテリ12のSOCが上下限値を超えない範囲において、エンジン11を目標動作点Pe*で運転する。例えば、図2及び図3に示すように、要求パワーPr*がエンジン11の目標動作点Pe*より小さい場合には、過剰な出力分をMG1により電力変換してバッテリ12を充電する。一方、図4に示すように、車両要求パワーPr*がエンジン11の目標動作点Pe*より大きい場合には、不足の出力分をMG2でアシストする。即ち、バッテリ12の放電がなされる。つまり、要求パワーPr*と目標動作点Pe*との差が充放電量となるため、運転制御手段31は、要求パワーPr*に基づいて充放電量を算出することができる。運転制御手段31は、充放電量の算出値が充放電上下限量を超えないように、上下限ガード処理を行うことが好ましい。
【0041】
駆動制御装置30は、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32を有する。
【0042】
図2に示すように、動作点変更手段32は、エンジン11の温度に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更することが好適である。なお、図2のT1,T2,T3は、エンジン11の温度であり、T1<T2<T3である。つまり、本実施形態では、完全暖機前と完全暖機後とで目標動作点Pe*を一定の値とせず、エンジン11の暖機状態に応じて変化する変動値とすることが好適である。その結果として、要求パワーPr*が同じであっても、暖機レベルにより充放電量が異なる。
【0043】
エンジン11の温度は、例えば、排気ガスの温度やエンジンオイルの温度に基づいて判定してもよいが、エンジン11の冷却水温度に基づいて判定することが好適である。動作点変更手段32は、例えば、エンジンECU16を介して水温センサ19の検出情報を取得することができる。以下では、冷却水温度に基づいてエンジン11の温度を判定するものとして説明する。
【0044】
動作点変更手段32は、冷却水温度に基づき、冷却水温度が低いほど低出力側にシフトするように、目標動作点Pe*を変更することが好ましい。つまり、完全暖機前における修正目標動作点Pe*を完全暖機状態における目標動作点Pe*よりも低負荷側に設定し(例えば、Pe*(T2)<Pe*(T3))、冷却水温度が低くなるほど修正目標動作点Pe*を低負荷側にシフトさせることが好ましい(例えば、Pe*(T1)<Pe*(T2))。その結果として、冷却水温度が低くなるほど、充電量が少なくなり、又は放電量が多くなる。
【0045】
動作点変更手段32は、各暖機状態において、エンジン11の熱効率が最大となるように、目標動作点Pe*を変更することが好ましい。上記のように、エンジン11の暖機状態により熱効率が最大となるエンジン出力が異なるため、動作点変更手段32は、修正目標動作点Pe*が各暖機状態で熱効率が最大となるエンジン出力に設定されるように目標動作点Pe*を変更する。これにより、エンジン11の暖機状態が異なる場合でも熱効率の高い条件下でエンジン11を運転することができ、特に冷間時における燃費性能が向上する。
【0046】
図2に示す例では、エンジン11の温度が低いほど、熱効率が最大となるエンジン出力が低負荷側にシフトする。ゆえに、各暖機状態でエンジン11の熱効率が最大となるように目標動作点Pe*を変更すると、冷却水温度が低いほど修正目標動作点Pe*が低負荷側にシフトすることになる。一方、冷却水温度が低いほど熱効率が最大となるエンジン出力が高負荷側にシフトする場合には、冷却水温度が低いほど修正目標動作点Pe*が高出力側にシフトするように目標動作点Pe*を変更してもよい。このようなエンジン11としては、例えば、低温側でフリクションが低くなるエンジンオイルを用いたものが例示できる。
【0047】
さらに、動作点変更手段32は、エンジン11の停止頻度が低い所定の運転状態において、目標動作点Pe*を低出力側にシフトさせることが好ましい。
【0048】
図3及び図4に示すように、動作点変更手段32は、各冷却水温度での修正目標動作点Pe*において、エンジン11の熱効率が最大となるように目標動作点Pe*を変更した後、さらにエンジン11の運転状況を想定して修正目標動作点Pe*を変更することがより好ましい。一方、動作点変更手段32は、例えば、エンジン11の冷却水温度に基づいて目標動作点Pe*を変更せず、HV車両10の運転状態がエンジン11の停止頻度が低い運転状態であることを条件として、目標動作点Pe*を変更してもよい。
【0049】
エンジン11の停止頻度が低い所定の運転状態には、エンジン11の停止頻度が低くなる可能性が高い状態が含まれる。所定の運転状態としては、例えば、ヒーター要求がある場合、外気温度が所定温度以下の低温である場合、ナビゲーション装置28に登録された走行予定経路が予め設定された高負荷走行経路である場合、及びこれらの条件が複数組み合された場合などが例示できる。動作点変更手段32は、例えば、これらの状態をエンジン11の停止頻度が低い所定の運転状態として記憶しておき、HV車両10の運転状態が予め記憶した運転状態であると判断したときに、目標動作点Pe*を変更することができる。
【0050】
動作点変更手段32は、例えば、ヒーター要求がある場合には、修正目標動作点Pe*をさらに低出力側にシフトさせる。動作点変更手段32は、ヒータースイッチ21のON操作信号を取得し、当該信号を取得したときに修正目標動作点Pe*を変更することができる。或いは、動作点変更手段32は、外気温度が所定温度以下の低温である場合に、又はヒーター要求があり且つ外気温度が所定温度以下である場合に、修正目標動作点Pe*を、さらに低出力側にシフトさせる。動作点変更手段32は、外気温センサ20から外気温度を取得して、当該外気温度と所定温度とを比較し、外気温度<所定温度のときに修正目標動作点Pe*を変更することができる。
【0051】
所定温度は、例えば、ヒーター要求がなされることが想定される温度として予め定められた温度(例えば、10℃)に設定することができる。或いは、ユーザーがヒーター要求する頻度が高くなる外気温度を記憶しておき、当該温度を所定温度に設定することもできる。なお、外気温度が低い場合には、エンジン11が暖機され難く、一旦完全暖機状態になっても再びエンジン11が冷え易い。このため、暖機運転の頻度が高くなり、特にエンジン11の停止頻度が低くなり易い。
【0052】
また、動作点変更手段32は、例えば、ヒーター要求があり且つナビゲーション装置28に登録された走行予定経路が予め設定された高負荷走行経路である場合に、修正目標動作点Pe*をさらに低出力側にシフトさせる。動作点変更手段32は、ヒータースイッチ21の操作信号と、ナビゲーション装置28の走行予定経路の登録情報とを取得して、修正目標動作点Pe*を変更するか否かを判定することができる。高負荷走行経路としては、高速での走行が想定される高速道路や勾配の大きな登坂道路などが例示できる。
【0053】
動作点変更手段32は、ヒーター要求がある場合など、エンジン11の停止頻度が低くなる運転状態のときには、例えば、運転状態に対応して予め定めた一定量だけ目標動作点Pe*を低出力側にシフトさせることができる。より好ましくは、エンジン11の停止頻度が低くなる運転状態において、さらにバッテリ12のSOCを考慮して、目標動作点Pe*のシフト量を変更する。
【0054】
動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い所定の運転状態であり、且つバッテリ12のSOCが第1閾値を超えるときには、SOCに応じて目標動作点Pe*を低出力側にシフトさせる。第1閾値としては、目標SOCと下限値との間(例えば、20%〜60%)に設定することが好ましく、目標SOCと同じ値(例えば、60%)とすることができる。動作点変更手段32は、SOCが第1閾値を超えるときに、SOCが高くなるほど目標動作点Pe*のシフト量を大きくすることができる。例えば、SOCとシフト量とを規定したマップを用いて、目標動作点Pe*を変更することができる。
【0055】
一方、動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い所定の運転状態であり、且つバッテリ12のSOCが第2閾値未満であるときには、SOCに応じて目標動作点Pe*を高出力側にシフトさせることができる。第2閾値としては、第1閾値と同様に、目標SOCと下限値との間(例えば、20%〜60%)に設定することが好ましい。第2閾値は、完全暖機前において充電機会を抑制する観点から、下限値の近傍に設定できる。或いは、第1閾値と第2閾値とを同じ値に設定してもよい。
【0056】
動作点変更手段32は、例えば、ヒーター要求がある場合に、目標SOCを境界として目標動作点Pe*を変更する。具体的には、ヒーター要求があり、SOCが目標SOCを超えたときに、SOCに基づいて目標動作点Pe*を低出力側にシフトさせ、ヒーター要求があり、SOCが目標SOC未満であるときに、SOCに基づいて目標動作点Pe*を高出力側にシフトさせる。
【0057】
図3及び図4に示す例(冷却水温度がT2の場合を例示)では、第1閾値を第2閾値よりも大きな値に設定している。例えば、ヒーター要求がある場合において、SOCが第1閾値を超える高SOCのときには、修正目標動作点Pe*がさらに低負荷側にシフトし、修正目標動作点Pe*>追加修正目標動作点Pe*となる。一方、SOCが第2閾値未満の低SOCのときには、修正目標動作点Pe*が高負荷側にシフトし、修正目標動作点Pe*<追加修正目標動作点Pe*となる。そして、SOCが第2閾値以上第1閾値以下のときには、修正目標動作点Pe*は変更されない。その結果、SOCが第2閾値以上第1閾値以下の場合と比較して、高SOC時の充電量は減少し、低SOC時の充電量は増加する。一方、SOCが第2閾値以上第1閾値以下の場合と比較して、高SOC時の放電量は増加し、低SOC時の放電量は減少する。
【0058】
次に、図7を参照して、駆動制御装置30による制御の一例を説明する。
なお、図7では、SOCが上下限値を超えない範囲にあり、通常運転モードが選択される運転状態を示している。即ち、HV車両10の走行にエンジン11の動力が必要な運転状態であり、エンジン11が目標動作点Pe*で運転される状態である。
【0059】
まず、SOCから基本充放電量を設定する(S10)。基本充放電量は、バッテリ監視装置17から取得したSOCに基づいて、図6に例示するマップを用いて設定することができる。この手順は、運転制御手段31の機能により実行される。
【0060】
続いて、SOC及び車速から充放電上下限量を設定する(S11)。充放電上下限量は、SOC及び車速センサから取得した車速に基づいて、SOCと、車速と、充放電上下限量との関係を規定するマップを用いて設定することができ、上下限ガード処理に使用される。この手順は、運転制御手段31の機能により実行される。
【0061】
続いて、エンジン11の冷却水温度に基づいて、目標動作点Pe*を算出する(S12)。つまり、エンジン11の冷却水温度に応じて目標動作点Pe*を変更する。目標動作点Pe*は、上記のように、冷却水温度と目標動作点Pe*との関係を規定したマップを用いて、各冷却水温度条件でエンジン11の熱効率が最大となるように変更される。この手順は、動作点変更手段32の機能により実行される。
【0062】
続いて、要求パワーPr*に基づいて、充放電量を算出する(S13)。要求パワーPr*は、アクセル開度及び車速に基づいて導出した走行要求パワーに基本充放電量を加算することで算出され、充放電量は、目標動作点Pe*から要求パワーPr*を差し引くことで算出される。この手順は、運転制御手段31の機能により実行される。
【0063】
続いて、ヒーター要求があるか否かを判定する(S14)。ヒーター要求の有無は、ヒータースイッチ21のON操作信号の有無により判定できる。この手順は、動作点変更手段32の機能により実行される。動作点変更手段32は、ヒーター要求以外にも、HV車両10の運転状態がエンジン11の停止頻度が低くなる又は低くなる可能性が高い運転状態であるか否かを判定することができる。
【0064】
S14でヒーター要求があると判定されたときには、エンジン11が完全暖機状態であるか否かを判定する(S15)。一方、S14でヒーター要求がないと判定されたときには、S12で変更された目標動作点Pe*を維持し充放電量の算出値を変更しないため、上下限ガード処理(S18)に進む。この手順は、動作点変更手段32の機能により実行される。
【0065】
S15で完全暖機状態ではないと判定されたときには、SOCの判定を行う(S16)。一方、S15で完全暖機状態であると判定されたときには、変更された目標動作点Pe*を維持し充放電量の算出値を変更しないため、上下限ガード処理(S18)に進む。この手順では、バッテリ監視装置17から取得したSOCと、2つの閾値とを比較して、SOCが第2閾値以上第1閾値以下であるか否かを判定する。この手順は、動作点変更手段32の機能により実行される。
【0066】
S16でSOCが第2閾値以上第1閾値以下ではないと判定された場合、つまりSOCが第1閾値を超える場合又はSOCが第2閾値未満である場合には、目標動作点Pe*をSOCに応じて変更することで充放電量の算出値を修正する(S17)。この手順は、動作点変更手段32の機能により実行される。
【0067】
最後に、充放電量がS11で設定された充放電上下限量を超えないように上下限ガード処理を行う(S18)。
【0068】
以上のように、駆動制御装置30は、目標動作点Pe*でエンジン11を運転し、要求パワーPr*と目標動作点Pe*をとの差分をMG1,MG2によるバッテリ12の充放電量とする運転制御手段31と、予め定めた変更条件に基づいて、完全暖機前におけるエンジン11の目標動作点Pe*を変更する動作点変更手段32とを有する。
【0069】
動作点変更手段32は、例えば、エンジン11の温度に基づき、各温度でエンジン11の熱効率が最大となるように目標動作点Pe*を変更する。これにより、各暖機状態における熱効率を考慮した目標動作点Pe*を設定でき、エンジン11をより効率良く運転できる。したがって、特に冷間時における燃費性能が向上する。
【0070】
動作点変更手段32は、例えば、ヒーター要求がある場合など、エンジン11の停止頻度が低い運転状態では、SOCを考慮した上で、SOCに応じて目標動作点Pe*を変更する。これにより、エンジン11の停止頻度が低い運転状態では、例えば、目標動作点Pe*を低出力側にシフトさせることで充電機会を少なくし、又は充電量を減らすことができる。一方、放電機会を増やし、又は放電量を多くすることができる。このとき、SOCが低い場合など、SOCの高止まりが生じる可能性が低い状態では、熱効率が最大となるエンジン出力でエンジン11を運転することができる。
【0071】
なお、上記実施形態は、本発明の目的を損なわない範囲で設計変更できる。
【符号の説明】
【0072】
10 ハイブリッド車両(HV車両)、MG1 第1モータジェネレータ、MG2 第2モータジェネレータ、11 エンジン、12 バッテリ、13 動力分配機構、14,15 インバータ、16 エンジン電子制御ユニット(エンジンECU)、17 バッテリ監視装置、18 ヒーターコア、19 水温センサ、20 外気温センサ、21 ヒータースイッチ、22 出力軸、23,24 回転軸、25 減速機、26 車軸、27 駆動輪、28 ナビゲーション装置、30 駆動制御装置、31 運転制御手段、32 動作点変更手段。
【特許請求の範囲】
【請求項1】
所定のエンジン出力である目標動作点でエンジンを運転し、要求パワーとエンジンの目標動作点との差分を回転電機によるバッテリの充放電量とする運転制御手段と、
予め定めた変更条件に基づいて、完全暖機前におけるエンジンの目標動作点を変更する動作点変更手段と、
を有することを特徴とするハイブリッド車両の駆動制御装置。
【請求項2】
請求項1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの温度に基づき、当該温度が低いほど低出力側にシフトするように、目標動作点を変更することを特徴とするハイブリッド車両の駆動制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの温度に基づき、各温度でエンジンの熱効率が最大となるように、目標動作点を変更することを特徴とするハイブリッド車両の駆動制御装置。
【請求項4】
請求項1〜3のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの停止頻度が低い所定の運転状態では、目標動作点を低出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項5】
請求項1〜3のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第1閾値を超えるときには、充電率に応じて目標動作点を低出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項6】
請求項5に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、バッテリの充電率が第2閾値未満であるときには、充電率に応じて目標動作点を高出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項7】
請求項4〜6のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、ヒーター要求がある場合及び外気温度が所定温度以下である場合の少なくとも一方の場合を、エンジンの停止頻度が低い所定の運転状態とすることを特徴とするハイブリッド車両の駆動制御装置。
【請求項8】
請求項4〜6のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、ナビゲーション装置に登録された走行予定経路が予め設定された高負荷走行経路である場合を、エンジンの停止頻度が低い所定の運転状態とすることを特徴とするハイブリッド車両の駆動制御装置。
【請求項1】
所定のエンジン出力である目標動作点でエンジンを運転し、要求パワーとエンジンの目標動作点との差分を回転電機によるバッテリの充放電量とする運転制御手段と、
予め定めた変更条件に基づいて、完全暖機前におけるエンジンの目標動作点を変更する動作点変更手段と、
を有することを特徴とするハイブリッド車両の駆動制御装置。
【請求項2】
請求項1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの温度に基づき、当該温度が低いほど低出力側にシフトするように、目標動作点を変更することを特徴とするハイブリッド車両の駆動制御装置。
【請求項3】
請求項1又は2に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの温度に基づき、各温度でエンジンの熱効率が最大となるように、目標動作点を変更することを特徴とするハイブリッド車両の駆動制御装置。
【請求項4】
請求項1〜3のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの停止頻度が低い所定の運転状態では、目標動作点を低出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項5】
請求項1〜3のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、エンジンの停止頻度が低い所定の運転状態であり、且つバッテリの充電率が第1閾値を超えるときには、充電率に応じて目標動作点を低出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項6】
請求項5に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、バッテリの充電率が第2閾値未満であるときには、充電率に応じて目標動作点を高出力側にシフトさせることを特徴とするハイブリッド車両の駆動制御装置。
【請求項7】
請求項4〜6のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、ヒーター要求がある場合及び外気温度が所定温度以下である場合の少なくとも一方の場合を、エンジンの停止頻度が低い所定の運転状態とすることを特徴とするハイブリッド車両の駆動制御装置。
【請求項8】
請求項4〜6のいずれか1に記載のハイブリッド車両の駆動制御装置において、
動作点変更手段は、ナビゲーション装置に登録された走行予定経路が予め設定された高負荷走行経路である場合を、エンジンの停止頻度が低い所定の運転状態とすることを特徴とするハイブリッド車両の駆動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−224220(P2012−224220A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−93834(P2011−93834)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]