
ハイブリッド車両及びその制御方法
【課題】 複数クラッチ式のトランスミッションを備えたハイブリッド車両において電動機の回転が外力によりロックされた状態を強制的に解放する。
【解決手段】 第2変速機構のいずれか1つの変速段を係合する一方で第1変速機構の変速段を解放することにより、電動機がロック状態にある場合に係合されていた第1変速機構の変速段から第2変速機構の変速段に変速段を変更する。変速段の変更と共に第1断接手段又は第2断接手段の少なくとも一方の係合状態を変更することで、機械的にロック状態にあった電動機を回転させる。ロック状態にあった電動機を回転できれば、ロック状態において通電電流が流れ続けていた電動機内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、同相通電によるスイッチング素子の熱による障害の発生を防止することができるようになる。
【解決手段】 第2変速機構のいずれか1つの変速段を係合する一方で第1変速機構の変速段を解放することにより、電動機がロック状態にある場合に係合されていた第1変速機構の変速段から第2変速機構の変速段に変速段を変更する。変速段の変更と共に第1断接手段又は第2断接手段の少なくとも一方の係合状態を変更することで、機械的にロック状態にあった電動機を回転させる。ロック状態にあった電動機を回転できれば、ロック状態において通電電流が流れ続けていた電動機内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、同相通電によるスイッチング素子の熱による障害の発生を防止することができるようになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動源として内燃機関エンジンと電動機とを備えた車両(いわゆるハイブリッド車両)及びその制御方法に関し、特に複数クラッチ式の変速機を備えたハイブリッド車両において電動機の回転が外力によりロックされた状態を強制的に解放する制御技術に関する。
【背景技術】
【0002】
最近では、駆動源として内燃機関(エンジン)の他に電動機(モータ)を更に具えたハイブリッドタイプの車両が知られている。ハイブリッド車両は、直流電源(バッテリ)からの直流電力を電力変換器(代表的にはインバータ)によって交流電力に変換して電動機を駆動するものが一般的であり、エンジンのみで車両を走行するエンジン単独走行、電動機のみで車両を走行するモータ単独走行、エンジンと電動機とを組み合わせて車両を走行するハイブリッド走行のいずれかで車両を走行させることのできるようになっている。
【0003】
このようなハイブリッド車両ではモータ単独走行時に、坂道の途中で静止したまま前後に車両が全く動かない状態あるいは運転者によりアクセルペダルとブレーキペダルが同時に踏まれる(所謂両踏みする)ことにより車両が停止した状態などの、電動機の回転が外力によってロックされた状態(ストールとも呼ぶ)となることがある。こうしたモータロック状態においては、電動機に設けられている複数相の固定子巻線のうち1相の巻線のみに電流が集中して流れる同相通電などと呼ばれる現象が生ずることから、特にモータロック状態が長時間に及ぶと、電力変換器(インバータ)に設けられている複数のスイッチング素子のうち前記電流が集中する相に対応したスイッチング素子が発熱し、その温度が許容範囲を超えて上昇することで当該スイッチング素子に熱による障害が発生してしまう、といった恐れがあった。
【0004】
そこで、上記問題に対処するための従来技術として、例えば特許文献1に記載の駆動力制御装置がある。この特許文献1の装置では、走行用モータの駆動力を駆動輪に伝達するクラッチの締結力を低減又は切断して走行用モータの通電相を切り替えることで、特定の相に対応したスイッチング素子の温度が許容範囲を超えて上昇することを防止するようにしている。具体的には、走行用モータの回転数が所定値以下である場合に走行用モータの何れかの相の固定子巻線への通電が所定時間継続したら、走行用モータの駆動力を駆動輪に伝達するクラッチの締結力を一時的に低減又は切断するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3964446号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、車両用の変速機(トランスミッション)には、近年、変速時における機械的動力の伝達の途切れをなくすために、奇数段の変速段で構成される第1の変速機構の入力軸(以下、第1入力軸という)と内燃機関の出力軸(以下、機関出力軸又はエンジン出力軸という)とを係合可能な第1のクラッチと、偶数段の変速段で構成される第2の変速機構の入力軸(以下、第2入力軸という)と機関出力軸とを係合可能な第2のクラッチとを備え、これら2つのクラッチを交互につなぎ替えることで変速を行う、いわゆるデュアルクラッチ式トランスミッションが知られている。このデュアルクラッチ式トランスミッションは、例えば、奇数段から偶数段に変速する際には、偶数段の歯車対を予め噛み合わせておき、奇数段に機械的動力を伝達する第1のクラッチを解放状態にすると共に、偶数段に機械的動力を伝達する第2のクラッチを締結状態にすることで、変速時における動力伝達の途切れを抑制している。
【0007】
しかし、上記特許文献1に示した従来装置は、上記したデュアルクラッチ式トランスミッションを備えたタイプのハイブリッド車両に適用することができなかった。その理由は、デュアルクラッチ式トランスミッションを備えたハイブリッド車両においてはエンジンからの動力を伝達する入力軸と電動機からの動力を伝達する入力軸とが同軸に配置されていることに起因する。ところが、特許文献1に記載の装置は、エンジンからの動力を伝達する軸と電動機からの動力を伝達する軸とが同軸に配置されていない車両に適用されるものであり、それ故にエンジンからの動力を伝達する入力軸と電動機からの動力を伝達する入力軸とが同軸に配置されているデュアルクラッチ式トランスミッションを備えたハイブリッド車両に適用するのは不可能であった。
【0008】
本発明は上述の点に鑑みてなされたもので、デュアルクラッチ式トランスミッションを備えたハイブリッド車両において電動機の回転が外力によりロックされた状態にある場合に、駆動輪を止めた状態のままで前記モータロック状態を一時的に解放することのできるようにしたハイブリッド車両及びその制御方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明に係るハイブリッド車両は、駆動源に内燃機関(2)と電動機(3)とを有してなり、前記内燃機関出力軸及び前記電動機(3)からの機械的動力を該電動機(3)に接続された第1入力軸(100)で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸(100)と駆動輪(7R,7L)とを係合させることが可能な第1変速機構と、前記内燃機関出力軸からの機械的動力を第2入力軸(400)で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸(400)と駆動輪(7R,7L)とを係合させることが可能な第2変速機構と、前記内燃機関出力軸と前記第1入力軸(100)との係合及び非係合を切り替え可能な第1断接手段(C1)と、前記内燃機関出力軸と前記第2入力軸(400)との係合及び非係合を切り替え可能な第2断接手段(C2)と、前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段(C1)及び第2断接手段(C2)の係合状態とを制御可能な制御装置(10)とを備えたハイブリッド車両において、前記制御装置(10)は、前記電動機(3)のロック状態を検出するロック検出手段(S1)と、前記ロック検出手段(S1)による前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放すると共に、前記第1断接手段(C1)又は前記第2断接手段(C2)の少なくとも一方の係合状態を変更するロック状態解放手段(S2)とを含むことを特徴とする。
【0010】
また、本発明の好ましい一実施態様として、前記ロック状態解放手段(S2)は、前記第1断接手段(C1)の係合状態を前記内燃機関出力軸と前記第1入力軸(100)とを係合させた締結状態に、前記第2断接手段(C2)の係合状態を前記エンジン出力軸と前記第2入力軸(400)とを係合させた締結状態にする。
さらには、前記ロック状態解放手段(S2)は、さらに前記締結状態にされた第1断接手段(C1)及び第2断接手段(C2)の少なくとも一方の締結力を低減する。
【0011】
本発明にかかるデュアルクラッチ式トランスミッションを備えたハイブリッド車両では、第2変速機構のいずれか1つの変速段を係合する一方で第1変速機構の変速段を非係合にすることにより、電動機(3)がロック状態にある場合に係合されていた第1変速機構の変速段から第2変速機構の変速段に変速段を変更する。また、この変速段の変更と共に、第1断接手段(C1)又は前記第2断接手段(C2)の少なくとも一方の係合状態を変更することで、機械的にロック状態にあった電動機(3)を回転させる。ロック状態にあった電動機(3)を回転できれば、ロック状態において通電電流が流れ続けていた電動機内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。特には、第1断接手段(C1)と第2断接手段(C2)の係合状態を共に締結状態とし、さらには前記締結状態にされた第1断接手段(C1)及び第2断接手段(C2)の少なくとも一方の締結力を低減するといった制御を行うことで、機械的に電動機(3)を回転させることのできるようにしている。こうした機械的な動作により電動機(3)を回転させることによれば、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済み、またわざわざ内燃機関(2)を始動させる必要がないので無駄に燃料を消費しないので有利である。
【0012】
なお、上記で括弧内に記した図面参照符号は、後述する実施形態において対応する構成要素等を参考のために例示したものである。
【発明の効果】
【0013】
本発明によれば、ロック状態を検出した場合に、第1変速機構及び第2変速機構における変速段の係合/非係合制御と、第1断接装置及び第2断接装置の少なくとも一方の係合状態を変更する両クラッチの締結制御とを行うことによって引き起こされるトランスミッションでの機械的な動作によって、ロック状態にあった電動機を回転させるようにした。ロック状態にあった電動機を回転できれば、同相通電を回避できる。上記制御に応じた機械的な動作により電動機を回転させる本発明では、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済み、またわざわざ内燃機関を始動させる必要がないので無駄に燃料を消費しない、という効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態における車両の概略的な接続構成図。
【図2】図1に示すモータ及びモータ制御手段を示す回路図。
【図3】図1に示すトランスミッションのスケルトン図。
【図4】図1に示す電子制御ユニットにより実行されるモータロック状態解放制御処理の概略を示すフローチャート。
【図5】図4におけるモータロック状態検出処理の一例を示すフローチャート。
【図6】図4におけるモータロック状態解放処理の一例を示すフローチャート。
【発明を実施するための形態】
【0015】
以下、この発明の実施の形態を添付図面に従って詳細に説明する。
【0016】
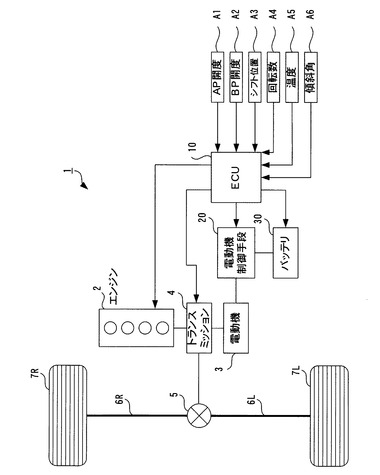
まず、本実施形態における車両の構成を説明する。図1は、本発明の一実施形態における車両の概略的な接続構成図である。本実施形態の車両1は、いわゆるハイブリッド車両であり、図1に示すように、駆動源としてのエンジン2及び電動機3と、電動機3を制御するための電動機制御手段20と、バッテリ30と、トランスミッション(変速機)4と、ディファレンシャル機構5と、左右のドライブシャフト6R、6Lと、左右の駆動輪7R、7Lとを備える。ここで、前記電動機3はモータでありモータジェネレータを含み、前記バッテリ30は蓄電器でありキャパシタを含む。また、前記内燃機関2はエンジンでありディーゼルエンジンやターボエンジンなどを含む。内燃機関(以下、エンジン)2と電動機(以下、モータ)3の回転駆動力は、トランスミッション4、ディファレンシャル機構5およびドライブシャフト6R、6Lを介して左右の駆動輪7R、7Lに伝達される。
【0017】
また、この車両1は、エンジン2、モータ3、トランスミッション4、ディファレンシャル機構5、電動機(以下、モータ)制御手段20およびバッテリ30をそれぞれ制御するための電子制御ユニット(ECU:Electronic Control Unit)10を備える。電子制御ユニット10は1つのユニットとして構成されるだけでなく、例えば内燃機関2を制御するためのエンジンECU、モータ3やモータ制御手段20を制御するためのモータジェネレータECU、バッテリ30を制御するためのバッテリECU、トランスミッション4を制御するためのATECUなど複数のECUから構成されてもよい。この実施形態に示す電子制御ユニット10は、エンジン2を制御するとともに、モータ3やバッテリ30、トランスミッション4を制御する。
【0018】
電子制御ユニット10は、各種の運転条件に応じて、モータ3のみを動力源とするモータ単独走行(EV走行)をするように制御したり、エンジン2のみを動力源とするエンジン単独走行をするように制御したり、エンジン2とモータ3の両方を動力源として併用する協働走行(HEV走行)をするように制御する。また、電子制御ユニット10は、公知の各種の制御パラメータに従って後述のモータロック状態の解放制御(図4参照)や、その他の各種の運転に必要な制御を行う。この実施形態においては、制御パラメータとして、例えばアクセルペダルの踏み込み量を検出するアクセルペダルセンサA1からのアクセルペダル開度、ブレーキペダルの踏み込み量を検出するプレーキペダルセンサA2からのブレーキペダル開度、ギヤ段(変速段)を検出するシフトセンサA3からのシフト位置、モータ3の回転数を検出する回転数センサA4からのモータ回転数、モータ制御手段20内のモータ3の各相に応じたスイッチング素子の温度を検出する温度センサA5からのインバータ素子温度、傾きを検知する傾斜角センサA6からの車両の傾斜角などの各種信号が入力されるようになっている。勿論、ここに記載した以外の信号が入力されてもよい。
【0019】
エンジン2は、燃料を空気と混合して燃焼することにより車両1を走行させるための駆動力を発生する内燃機関エンジンである。モータ3は、エンジン2とモータ3との協働走行やモータ3のみのEV走行の際には、バッテリ30の電気エネルギーを利用して車両1を走行させるための駆動力を発生するモータとして機能するとともに、車両1の減速時にはモータ3の回生により電力を発電する発電機としても機能する。このモータ3の回生時には、バッテリ30は、モータ3により発電された電力(回生エネルギー)により充電される。
【0020】
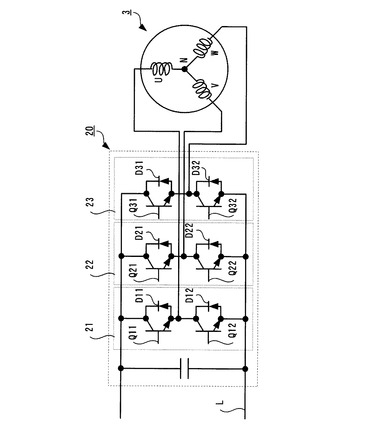
モータ3は、モータ制御手段20に接続される。図2は、図1に示すモータ3及びモータ制御手段20を示す回路図である。この図2に示すように、モータ制御手段20はU相アーム21と、V相アーム22と、W相アーム23とを含んでなるインバータ(電力変換器)であって、バッテリ30からの電源供給用のバッテリ電源ラインLに並列に設けられる。インバータ20の各相アームは、バッテリ電源ラインLに直列接続されたスイッチング素子から構成される。例えば、U相アーム21はスイッチング素子Q11,Q12からなり、V相アーム22は、スイッチング素子Q13,Q14からなり、W相アーム23は、スイッチング素子Q15,Q16からなる。スイッチング素子Q11〜Q16は、例えばIGBT(Insulated Gate Bipolar Transistor)、電力用MOS(Metal Oxide Semiconductor)トランジスタあるいは電力用バイポーラトランジスタ等の電力用半導体スイッチング素子である。これらのスイッチング素子Q11〜Q16に対しては、逆並列ダイオードD11〜D16がそれぞれ接続されている。こうしたスイッチング素子Q11〜Q16のオンオフは、電子制御ユニット10からのスイッチング制御信号によって制御される。
【0021】
モータ3は例えば界磁に永久磁石を利用した永久磁石式3相交流モータ等のブラシレスDCモータであり、固定子に設けられたU相コイル巻線U1、V相コイル巻線V1およびW相コイル巻線W1と、図示しない回転子とを含む。U相コイル巻線U1、V相コイル巻線V1およびW相コイル巻線W1の一端は、中性点N1で互いに接続され、その他端は、インバータ20のU相アーム21、V相アーム22およびW相アーム23とそれぞれ接続される。インバータ20は、電子制御ユニット10からのスイッチング制御信号に応答したスイッチング素子Q11〜Q16のオンオフ制御(スイッチング制御)により、バッテリ30及びモータ3の間での双方向の電力変換を行なう。具体的には、インバータ20は、電子制御ユニット10によるスイッチング制御に従って、バッテリ30からバッテリ電源ライン7を介して受ける直流電圧を3相交流電圧に変換し、その変換した3相交流電圧をモータ3へ出力する。これにより、モータ3は指定されたトルクを発生するように駆動される。また、インバータ20は、エンジン2の出力を受けてモータ3が発電した3相交流電圧を電子制御ユニット10によるスイッチング制御に従って直流電圧に変換し、その変換した直流電圧をバッテリ電源ライン7を介してバッテリ30へ出力することもできる。
【0022】
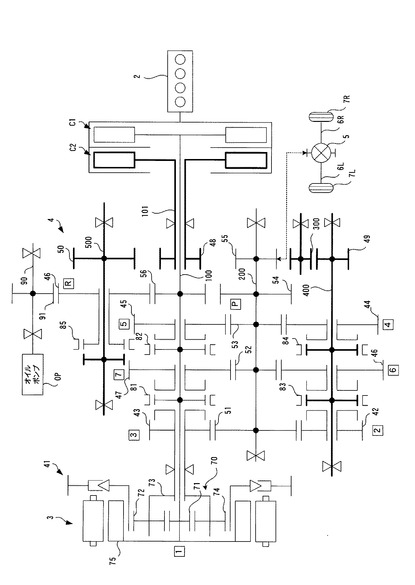
次に、本実施形態のトランスミッション4の構成を説明する。図3は、図1に示すトランスミッション4のスケルトン図である。ここに示すトランスミッション4は、前進7速、後進1速の平行軸式トランスミッションであり、乾式のデュアルクラッチ式トランスミッション(DCT)である。
【0023】
トランスミッション4には、エンジン2の機関出力軸をなすクランクシャフト(図示せず)およびモータ3に接続される内側メインシャフト100(第1入力軸)と、この内側メインシャフト100の外筒をなす外側メインシャフト101(第2入力軸)と、内側メインシャフト100にそれぞれ平行なセカンダリシャフト400(第2入力軸)、アイドルギヤ300、リバースシャフト500と、これらのシャフトに平行で出力軸をなすカウンタシャフト200とが設けられる。
【0024】
これらのシャフトのうち、外側メインシャフト101がアイドルギヤ300を介してリバースシャフト500およびセカンダリシャフト400に常時係合し、カウンタシャフト200がさらに図3では図示しないディファレンシャル機構5に常時係合するように配置される。
【0025】
また、トランスミッション4は、奇数段用の第1クラッチC1(第1断接装置)と、偶数段用の第2クラッチC2(第2断接装置)とを備える。第1および第2クラッチC1、C2は乾式のクラッチである。第1クラッチC1は内側メインシャフト100(第1入力軸)に結合される。第2クラッチC2は、外側メインシャフト101(第2入力軸の一部)に結合され、外側メインシャフト101上に固定されたギヤ48からアイドルギヤ300を介してリバースシャフト500およびセカンダリシャフト400(第2入力軸の一部)に連結される。
【0026】
内側メインシャフト100(第1入力軸)のモータ3よりの所定箇所にはプラネタリギヤ機構70が固定配置されており、プラネタリギヤ機構70のサンギヤ71はモータ3のロータに、キャリア73は3速駆動ギヤ43に、リングギヤ75は内側メインシャフト100(第1入力軸)にそれぞれ接続されている。内側メインシャフト100(第1入力軸)の外周には、図3において左側から順に、1速駆動ギヤとなるプラネタリギヤ機構70のキャリヤ73と、3速駆動ギヤ43と、7速駆動ギヤ47と、5速駆動ギヤ45が配置される。3速駆動ギヤ43、7速駆動ギヤ47、5速駆動ギヤ45はそれぞれ内側メインシャフト100に対して相対的に回転可能であり、また上記したようにギヤ43はプラネタリギヤ機構70のキャリヤ73に連結されている。更に、内側メインシャフト100上には、3速駆動ギヤ43と7速駆動ギヤ47との間に3−7速シンクロメッシュ機構(セレクタ機構)81が軸方向にスライド可能に設けられ、かつ、5速駆動ギヤ45に対応して5速シンクロメッシュ機構(セレクタ機構)82が軸方向にスライド可能に設けられる。所望のギヤ段に対応するシンクロメッシュ機構(セレクタ機構)をスライドさせて該ギヤ段のシンクロを入れることにより、該ギヤ段が内側メインシャフト100(第1入力軸)に連結される。メインシャフト100(第1入力軸)に関連して設けられたこれらのギヤ及びシンクロメッシュ機構によって、奇数段の変速段を実現するための第1変速機構が構成される。第1変速機構の各駆動ギヤは、カウンタシャフト200上に設けられた対応する従動ギヤに噛み合い、カウンタシャフト200を回転駆動する。
【0027】
セカンダリシャフト400(第2入力軸)の外周には、図3において左側から順に、2速駆動ギヤ42、6速駆動ギヤ46と、4速駆動ギヤ44とが相対的に回転可能に配置される。更に、セカンダリシャフト400上には、2速駆動ギヤ42と6速駆動ギヤ46との間に2−6速シンクロメッシュ機構83が軸方向にスライド可能に設けられ、かつ、4速駆動ギヤ44に対応して4速シンクロメッシュ機構(セレクタ機構)84が軸方向にスライド可能に設けられる。この場合も、所望のギヤ段に対応するシンクロメッシュ機構(セレクタ機構)をスライドさせて該ギヤ段のシンクロを入れることにより、該ギヤ段がセカンダリシャフト400(第2入力軸)に連結される。セカンダリシャフト400(第2入力軸)に関連して設けられたこれらのギヤ及びシンクロメッシュ機構によって、偶数段の変速段を実現するための第2変速機構が構成される。第2変速機構の各駆動ギヤも、カウンタシャフト200上に設けられた対応する従動ギヤに噛み合い、カウンタシャフト200を回転駆動する。なお、セカンダリシャフト400に固定されたギヤ49はアイドルギヤ300に結合しており、該アイドルギヤ300から外側メインシャフト101を介して第2クラッチC2に結合される。
【0028】
なお、第1変速機構において、任意の或る変速段を選択するとは、当該変速段に対応するギヤのシンクロが入れられて該ギヤが内側メインシャフト100(第1入力軸)に連結されることを意味する。また、この第1変速機構において、エンジン走行用の変速段(又は駆動ギヤ段)を実現するとは、該変速段(又は駆動ギヤ段)を上記のように選択した(シンクロを入れた)上で、対応する第1クラッチC1を係合させて内側メインシャフト100(第1入力軸)をエンジン出力軸に連結することを意味する。
【0029】
同様に、第2変速機構において、任意の或る変速段を選択するとは、当該変速段に対応するギヤのシンクロが入れられて該ギヤがセカンダリシャフト400(第2入力軸)に連結されることを意味する。また、この第2変速機構において、エンジン走行用の変速段(又は駆動ギヤ段)を実現するとは、該変速段(又は駆動ギヤ段)を上記のように選択した(シンクロを入れた)上で、対応する第2クラッチC2を係合させてセカンダリシャフト400(第2入力軸)をエンジン出力軸に連結することを意味する。
【0030】
リバースシャフト500の外周には、リバース駆動ギヤ46が相対的に回転可能に配置される。また、リバースシャフト500上には、リバース駆動ギヤ46に対応してリバースシンクロメッシュ機構85が軸方向にスライド可能に設けられ、また、アイドルギヤ300に係合するギヤ50が固定されている。リバース走行する場合は、シンクロメッシュ機構85のシンクロを入れて、第2クラッチC2を係合することにより、第2クラッチC2の回転が外側メインシャフト101及びアイドルギヤ300を介してリバースシャフト500に伝達され、リバース駆動ギヤ46が回転される。リバース駆動ギヤ46は内側メインシャフト100上のギヤ56に噛み合っており、リバース駆動ギヤ46が回転するとき内側メインシャフト100は前進時とは逆方向に回転する。内側メインシャフト100の逆方向の回転は、プラネタリギヤ機構70に連結したギヤ43を介してカウンタシャフト200に伝達される。また、リバース駆動ギヤ46はオイルポンプ駆動シャフト90上のギヤ91とも噛み合っていることから、第1クラッチC1を係合することによる内側メインシャフト100の回転又は第2クラッチC2を係合することによる外側メインシャフト101の回転がリバース駆動ギヤ46を介してオイルポンプ駆動シャフト90へと伝達されて、これによりオイルポンプ駆動シャフト90が回転することに伴って第1変速機構及び第2変速機構の各部に作動油を供給するオイルポンプOPが駆動される。
【0031】
カウンタシャフト200上には、図3において左側から順に、2−3速従動ギヤ51と、6−7速従動ギヤ52と、4−5速従動ギヤ53と、パーキング用ギヤ54と、ファイナル駆動ギヤ55とが固定的に配置される。ファイナル駆動ギヤ55は、ディファレンシャル機構5のディファレンシャルリングギヤ(図示せず)と噛み合うようになっており、これにより、カウンタシャフト200の出力軸の回転がディファレンシャル機構5の入力軸(つまり車両推進軸)に伝達される。
【0032】
また、プラネタリギヤ機構70のリングギヤ75とプラネタリギヤ72,74に係合するように、ワンウェイクラッチ41が設けられる。
【0033】
2−6速シンクロメッシュ機構83のシンクロスリープを左方向にスライドすると、2速駆動ギヤ42がセカンダリシャフト400に結合され、右方向にスライドすると、6速駆動ギヤ46がセカンダリシャフト400に結合される。また、4速シンクロメッシュ機構84のシンクロスリープを右方向にスライドすると、4速駆動ギヤ44がセカンダリシャフト400に結合される。このように偶数の駆動ギヤ段を選択した状態で、第2クラッチC2を係合することにより、トランスミッション4は偶数の変速段(2速、4速、又は6速)に設定される。
【0034】
3−7速シンクロメッシュ機構81のシンクロスリープを左方向にスライドすると、3速駆動ギヤ43が内側メインシャフト100に結合されて3速の変速段が選択され、右方向にスライドすると、7速駆動ギヤ47が内側メインシャフト100に結合されて7速の変速段が選択される。また、5速シンクロメッシュ機構82のシンクロスリープを右方向にスライドすると、5速駆動ギヤ45が内側メインシャフト100に結合されて5速の変速段が選択される。シンクロメッシュ機構81、82がどのギヤ43、47、45も選択していない状態では、プラネタリ機構70のキャリア73の回転がこれに連結したギヤ43を介してカウンタシャフト200に伝達され、1速の変速段が選択されることになる。奇数の駆動ギヤ段を選択した状態で第1クラッチC1を係合することにより、トランスミッション4は奇数の変速段(1速、3速、5速、又は7速)に設定される。
【0035】
トランスミッション4で実現すべき変速段の決定及び該変速段を実現するための制御(第1変速機構及び第2変速機構における変速段の選択すなわちシンクロの切り替え制御と、第1クラッチ及び第2クラッチの係合及び係合解除の制御等)は、公知のように、運転状況に従って電子制御ユニット10によって実行されるが、本実施形態では特に運転状況としてモータロック状態(ストール状態)にある場合に、従来にない変速段の切り替えや第1クラッチ及び第2クラッチの係合及び係合解除を含むモータロック状態解放のための制御を行い、モータロック状態を強制的に解放することによって、インバータ20のスイッチング素子(図2参照)の熱による障害の発生を防止しようとするものである。以下、説明する。
【0036】
電子制御ユニット10によって実行されるモータロック状態の解放のための制御例について、図4〜図6を参照して説明する。図4に示すモータロック状態の解放制御処理は、モータ3のみを用いた車両走行であるEV走行(モータ単独走行)に切り替えることが決定されたときに開始されて、EV走行中は繰り返し実行される。EV走行中にはモータ3に対し一定以上の電流が供給され、モータ3はトルクを発生している状態にある。
【0037】
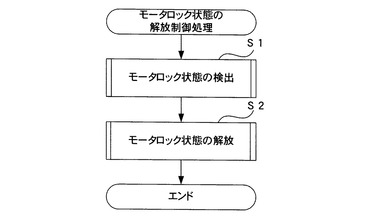
モータロック状態の解放制御処理は、大別して、モータロック状態の検出処理S1(ロック状態検出手段)、モータロック状態の解放処理S2(ロック状態解放手段)を含む。まず、モータロック状態の検出処理S1(ロック状態検出手段)では、モータ3の回転が外力によってロックされた状態であるか否かを判定する。図5は、モータロック状態検出処理S1の具体例を示す。
【0038】
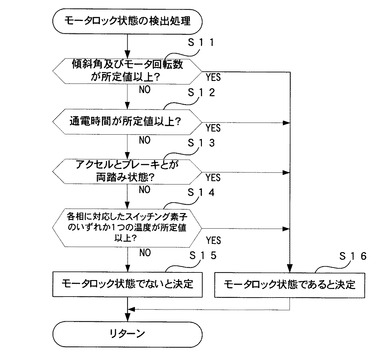
ステップS11では、制御パラメータとして取得される車両の傾斜角及びモータ回転数に従って、車両の傾きが所定値以上であり且つモータ3の回転数が所定の回転数以下であるか否かを判定する。すなわち、モータ3へ一定以上の電流が供給されているにも関わらず、車両が坂道の途中で静止したまま前後に車両が全く動かない状態(モータ3がロック状態となる態様の1つ)であるか否かを判定する。車両の傾きが所定値以上であり且つモータ3の回転数が所定の回転数以下であると判定した場合には(ステップS11のYES)、モータロック状態にあると決定する(ステップS15)。
【0039】
ステップS12では、制御パラメータとして取得されるアクセルペダル開度及びブレーキペダル開度に従って、これらの開度が共に所定値以上であるか否かを判定する。すなわち、運転者がアクセルペダル及びブレーキペダルを同時に操作した両踏みにて車両が停止している状態(モータ3がロック状態となる態様の1つ)であるか否かを判定する。アクセルペダル開度及びブレーキペダル開度が共に所定値以上であると判定した場合つまり両踏みである場合には(ステップS12のYES)、モータロック状態にあると決定する(ステップS15)。
【0040】
ステップS13では、モータ制御手段20によるモータ3の何れかの相の固定子巻線に所定時間にわたって通電が行われた後に、モータ3の回転数が例えば0を含む所定の回転数以下であるか否かを判定する。モータ3の回転数が所定の回転数以下であると判定した場合には(ステップS13のYES)、モータロック状態にあると決定する(ステップS15)。すなわち、この場合にモータ3の回転数が所定の回転数以下であると、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子に引き続き通電電流が流れ続けて過剰な局部発熱が生じ得る恐れがあるので、モータロック状態と判断する。
【0041】
ステップS14では、制御パラメータとして取得されるインバータ素子温度に従って、モータ制御手段20により通電されるモータ3の各相の固定子巻線に対応するインバータ20の各スイッチング素子の温度の少なくともいずれか1つが所定の温度以上に上昇しているか否かを判定する。前記所定の温度は予め設定された温度であって、モータ3の経年劣化に影響しない温度である。各スイッチング素子の温度の少なくともいずれか1つが所定の温度以上に上昇していると判定した場合には(ステップS14のYES)、モータロック状態にあると決定する(ステップS15)。すなわち、この場合には既に、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子のみに通電電流が流れ続けて過剰な局部発熱が生じている状態であるので、モータロック状態と判断する。
【0042】
上記ステップS11〜S14の全ての処理において「NO」と判定された場合には、モータロック状態にないと決定する(ステップS16)。
【0043】
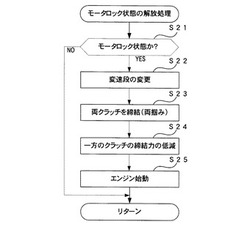
図4に戻り、モータロック状態の解放処理S2(ロック状態解放手段)では、トランスミッション4内において外乱を生じさせることによって、ロック状態にあるモータ3を少なくとも微小な回転角だけでも強制的に回転させる(モータロック状態を解放すると言う)ようにする。ロック状態にあるモータ3を少しだけでも強制的に回転させることによって、通電電流が流れ続けており過剰な局部発熱が生じる恐れのあったインバータ20内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が変更される(切り替えられる)。図6は、モータロック状態解放処理S2の具体例を示す。
【0044】
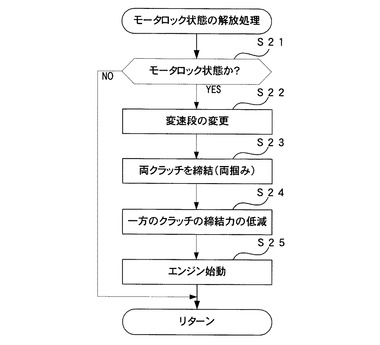
ステップS21は、モータロック状態であるか否かを判定する。この判定は上記したモータロック状態検出処理S1でのモータロック状態であるかないかの決定に基づく(図5のステップS15及びS16参照)。モータロック状態でないと判定した場合には(ステップS21のYES)、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子に引き続き通電電流が流れ続けて過剰な局部発熱が生じ得る恐れがないので、後述するようなモータロック状態を解放するための各種処理(ステップS22〜S26)を実行することなしに当該処理を終了する。
【0045】
他方、モータロック状態であると判定した場合には(ステップS21のNO)、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のあるスイッチング素子のみに引き続き通電電流が流れ続け、そのままでは前記スイッチング素子に過剰な局部発熱が生じ得る恐れがあるので、それを避けるべく以下に示すようなモータロック状態を解放するための各種処理(ステップS22〜S25)を実行する。
【0046】
ステップ22は、1速駆動ギヤから2速駆動ギヤへと変速段を変更するようトランスミッション4を制御する。具体的には、モータ3の回転に応じてキャリア73に1速相当のトルクを発生させるためにリングギヤ75をロックしていたワンウェイクラッチ41(オン状態)を、リングギヤ75をロックしていない状態(オフ状態)とする。また、偶数段の変速段を実現する第2変速機構において、2−6速シンクロメッシュ機構83のシンクロスリープを左方向にスライドして2速駆動ギヤ42をセカンダリシャフト400に結合する制御を行う。これにより、トランスミッション4において1速の変速段が選択されていた状態を抜けて2速の変速段が選択されている状態になる。
【0047】
ステップS23は、奇数段に機械的動力を伝達する第1のクラッチC1と、偶数段に機械的動力を伝達する第2のクラッチC2の少なくとも一方を係合制御して、第1のクラッチC1と第2のクラッチC2の両方共を完全締結状態(つまり両掴み状態)とする。モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとは、両掴み制御前においてはお互いが1つの同じ伝達経路、具体的には内側メインシャフト100、3速駆動ギヤ43、カウンタシャフト200を辿っており、それらが均衡していたためにモータロック状態が生じていた。しかし、上記両掴み制御を行うことによれば、モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとを、デュアルクラッチ機構を介した2つの異なる伝達経路にそれぞれ分散させることができるようになる。したがって、第1のクラッチC1と第2のクラッチC2を両掴み状態にすると、両掴み制御前のモータロック状態において均衡していたモータ3から入力される1速相当のトルクと、駆動輪から入力される外力によるトルクとのバランスを僅かに崩すことが可能となる。そうすると、僅かではあるがモータ3の回転が許容されることになる。全く回転していなかったモータロック状態から僅かでもモータ3を回転できれば、モータロック状態において通電電流が流れ続けていた1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。
【0048】
さらに、第1のクラッチC1と第2のクラッチC2を両掴み状態とした場合には、内側メインシャフト100又は外側メインシャフト101の回転がリバース駆動ギヤ46を介してオイルポンプ駆動シャフト90へと伝達され、オイルポンプOPを駆動することになる。オイルポンプOPが駆動されると、その機械的な動作に従ってモータ3に振動が生じる。モータ3が振動することによりモータロック状態が解除されて、モータロック状態において通電電流が流れ続けていた1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。
【0049】
上記のように第1のクラッチC1と第2のクラッチC2の両方を共に完全締結状態とした両掴みにすることで、モータロック状態を解放することはできる。ただし、許容されるモータ3の回転は本当に僅かなものである。そこで、より確実にモータ3を回転させるべく、完全締結状態にある第1のクラッチC1及び第2のクラッチC2の一方を半クラッチ状態に制御する(ステップS24)。具体的には、偶数段に機械的動力を伝達する第2のクラッチC2の締結力を減少させることにより、第2のクラッチC2をすべり(スリップ)が発生している状態とする。これによれば、デュアルクラッチ機構を介した2つの異なる伝達経路にそれぞれ分散されたうちのモータ3から入力される1速相当のトルクが、前記第2のクラッチC2のすべりに従って抜けることとなる。これにより、モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとのバランスをより大きく崩すことができるので、より確実にモータ3の回転を許容することになる。したがって、駆動輪が固定された状態にあってもモータ3は回転できるので、同相通電を回避することができる。
【0050】
ステップS25は、エンジン2を押し掛け始動する。すなわち、前記第1クラッチC1及び第2クラッチC2を共に完全締結状態としてから第2クラッチC2を半クラッチ状態とすることによりモータ3の回転許容量をより拡大することができ、またモータ3から入力されたトルクをエンジン2に伝達することが可能となるので、エンジン2を押し掛け始動する。エンジン2を始動することで、モータ3から入力される1速相当のトルクだけでなくエンジン2から入力されるトルクを用いて、駆動輪から入力される外力によるトルクとのバランスを保つことができる。したがって、モータ3の負担を減少できるので恒常的に同相通電を回避することができるようになる。
【0051】
なお、上述した実施例では、第2のクラッチC2の締結力を減少させて第2のクラッチC2にすべり(スリップ)が発生させた後に、エンジン2を始動させるようにしたが(ステップS24,S25参照)、これに限らず、エンジン2を始動させなくともよい。ただし、その場合、第2のクラッチC2の締結力を一時的に減少してモータ3を空転させた後に、再度第2のクラッチC2を完全締結させるとよい。また、こうした第2のクラッチC2の締結制御を繰り返し行って、そのたびに通電相の切り替えが行われるようにするとよい。
【0052】
以上のように、本発明ではモータロック状態を検出した場合に、第1変速機構及び第2変速機構における変速段の係合/非係合制御(変速制御)と、第1クラッチC1及び第2クラッチC2の両クラッチの締結制御とを行うことにより、トランスミッション4を機械的に動作させる。特には、第1クラッチC1及び第2クラッチC2の両クラッチを同時に締結する、さらには同時に締結したうちの第2クラッチC2を半クラッチ状態にするといった通常の走行制御時には行わない特別な制御を行うことで、一時的にでも互いがつり合っていたモータ3から入力されるトルクと外力により駆動輪から入力される外力によるトルクとのバランスを僅かに崩すことができ、こうしてモータ3を僅かでも回転させることで同相通電を防止するようにしている。上記制御によるトランスミッション4の機械的な動作においては、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済む、という利点がある。また、上記制御はエンジン2を始動させる必要がなくても実現することができるので、無駄に燃料を消費しない。
【符号の説明】
【0053】
1 ハイブリッド車両
2 エンジン
3 電動機(モータ)
4 トランスミッション(変速機)
5 ディファレンシャル機構
6R,6L ドライブシャフト
7R,7L 駆動輪
10 電子制御ユニット
20 電動機(モータ)制御手段(インバータ)
21 U相アーム
22 V相アーム
23 W相アーム
30 バッテリ
41 ワンウェイクラッチ
70 プラネタリギヤ機構
71 サンギヤ
72,74 プラネタリギヤ
73 キャリア
75 リングギヤ
C1 第1クラッチ
C2 第2クラッチ
OP オイルポンプ
Q11〜Q32 スイッチング素子
L バッテリ駆動ライン
90 オイルポンプ駆動シャフト
100 内側メインシャフト
101 外側メインシャフト
200 カウンタシャフト
300 アイドルギヤ
400 セカンダリシャフト
500 リバースシャフト
【技術分野】
【0001】
本発明は、駆動源として内燃機関エンジンと電動機とを備えた車両(いわゆるハイブリッド車両)及びその制御方法に関し、特に複数クラッチ式の変速機を備えたハイブリッド車両において電動機の回転が外力によりロックされた状態を強制的に解放する制御技術に関する。
【背景技術】
【0002】
最近では、駆動源として内燃機関(エンジン)の他に電動機(モータ)を更に具えたハイブリッドタイプの車両が知られている。ハイブリッド車両は、直流電源(バッテリ)からの直流電力を電力変換器(代表的にはインバータ)によって交流電力に変換して電動機を駆動するものが一般的であり、エンジンのみで車両を走行するエンジン単独走行、電動機のみで車両を走行するモータ単独走行、エンジンと電動機とを組み合わせて車両を走行するハイブリッド走行のいずれかで車両を走行させることのできるようになっている。
【0003】
このようなハイブリッド車両ではモータ単独走行時に、坂道の途中で静止したまま前後に車両が全く動かない状態あるいは運転者によりアクセルペダルとブレーキペダルが同時に踏まれる(所謂両踏みする)ことにより車両が停止した状態などの、電動機の回転が外力によってロックされた状態(ストールとも呼ぶ)となることがある。こうしたモータロック状態においては、電動機に設けられている複数相の固定子巻線のうち1相の巻線のみに電流が集中して流れる同相通電などと呼ばれる現象が生ずることから、特にモータロック状態が長時間に及ぶと、電力変換器(インバータ)に設けられている複数のスイッチング素子のうち前記電流が集中する相に対応したスイッチング素子が発熱し、その温度が許容範囲を超えて上昇することで当該スイッチング素子に熱による障害が発生してしまう、といった恐れがあった。
【0004】
そこで、上記問題に対処するための従来技術として、例えば特許文献1に記載の駆動力制御装置がある。この特許文献1の装置では、走行用モータの駆動力を駆動輪に伝達するクラッチの締結力を低減又は切断して走行用モータの通電相を切り替えることで、特定の相に対応したスイッチング素子の温度が許容範囲を超えて上昇することを防止するようにしている。具体的には、走行用モータの回転数が所定値以下である場合に走行用モータの何れかの相の固定子巻線への通電が所定時間継続したら、走行用モータの駆動力を駆動輪に伝達するクラッチの締結力を一時的に低減又は切断するようにしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3964446号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、車両用の変速機(トランスミッション)には、近年、変速時における機械的動力の伝達の途切れをなくすために、奇数段の変速段で構成される第1の変速機構の入力軸(以下、第1入力軸という)と内燃機関の出力軸(以下、機関出力軸又はエンジン出力軸という)とを係合可能な第1のクラッチと、偶数段の変速段で構成される第2の変速機構の入力軸(以下、第2入力軸という)と機関出力軸とを係合可能な第2のクラッチとを備え、これら2つのクラッチを交互につなぎ替えることで変速を行う、いわゆるデュアルクラッチ式トランスミッションが知られている。このデュアルクラッチ式トランスミッションは、例えば、奇数段から偶数段に変速する際には、偶数段の歯車対を予め噛み合わせておき、奇数段に機械的動力を伝達する第1のクラッチを解放状態にすると共に、偶数段に機械的動力を伝達する第2のクラッチを締結状態にすることで、変速時における動力伝達の途切れを抑制している。
【0007】
しかし、上記特許文献1に示した従来装置は、上記したデュアルクラッチ式トランスミッションを備えたタイプのハイブリッド車両に適用することができなかった。その理由は、デュアルクラッチ式トランスミッションを備えたハイブリッド車両においてはエンジンからの動力を伝達する入力軸と電動機からの動力を伝達する入力軸とが同軸に配置されていることに起因する。ところが、特許文献1に記載の装置は、エンジンからの動力を伝達する軸と電動機からの動力を伝達する軸とが同軸に配置されていない車両に適用されるものであり、それ故にエンジンからの動力を伝達する入力軸と電動機からの動力を伝達する入力軸とが同軸に配置されているデュアルクラッチ式トランスミッションを備えたハイブリッド車両に適用するのは不可能であった。
【0008】
本発明は上述の点に鑑みてなされたもので、デュアルクラッチ式トランスミッションを備えたハイブリッド車両において電動機の回転が外力によりロックされた状態にある場合に、駆動輪を止めた状態のままで前記モータロック状態を一時的に解放することのできるようにしたハイブリッド車両及びその制御方法を提供しようとするものである。
【課題を解決するための手段】
【0009】
本発明に係るハイブリッド車両は、駆動源に内燃機関(2)と電動機(3)とを有してなり、前記内燃機関出力軸及び前記電動機(3)からの機械的動力を該電動機(3)に接続された第1入力軸(100)で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸(100)と駆動輪(7R,7L)とを係合させることが可能な第1変速機構と、前記内燃機関出力軸からの機械的動力を第2入力軸(400)で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸(400)と駆動輪(7R,7L)とを係合させることが可能な第2変速機構と、前記内燃機関出力軸と前記第1入力軸(100)との係合及び非係合を切り替え可能な第1断接手段(C1)と、前記内燃機関出力軸と前記第2入力軸(400)との係合及び非係合を切り替え可能な第2断接手段(C2)と、前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段(C1)及び第2断接手段(C2)の係合状態とを制御可能な制御装置(10)とを備えたハイブリッド車両において、前記制御装置(10)は、前記電動機(3)のロック状態を検出するロック検出手段(S1)と、前記ロック検出手段(S1)による前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放すると共に、前記第1断接手段(C1)又は前記第2断接手段(C2)の少なくとも一方の係合状態を変更するロック状態解放手段(S2)とを含むことを特徴とする。
【0010】
また、本発明の好ましい一実施態様として、前記ロック状態解放手段(S2)は、前記第1断接手段(C1)の係合状態を前記内燃機関出力軸と前記第1入力軸(100)とを係合させた締結状態に、前記第2断接手段(C2)の係合状態を前記エンジン出力軸と前記第2入力軸(400)とを係合させた締結状態にする。
さらには、前記ロック状態解放手段(S2)は、さらに前記締結状態にされた第1断接手段(C1)及び第2断接手段(C2)の少なくとも一方の締結力を低減する。
【0011】
本発明にかかるデュアルクラッチ式トランスミッションを備えたハイブリッド車両では、第2変速機構のいずれか1つの変速段を係合する一方で第1変速機構の変速段を非係合にすることにより、電動機(3)がロック状態にある場合に係合されていた第1変速機構の変速段から第2変速機構の変速段に変速段を変更する。また、この変速段の変更と共に、第1断接手段(C1)又は前記第2断接手段(C2)の少なくとも一方の係合状態を変更することで、機械的にロック状態にあった電動機(3)を回転させる。ロック状態にあった電動機(3)を回転できれば、ロック状態において通電電流が流れ続けていた電動機内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。特には、第1断接手段(C1)と第2断接手段(C2)の係合状態を共に締結状態とし、さらには前記締結状態にされた第1断接手段(C1)及び第2断接手段(C2)の少なくとも一方の締結力を低減するといった制御を行うことで、機械的に電動機(3)を回転させることのできるようにしている。こうした機械的な動作により電動機(3)を回転させることによれば、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済み、またわざわざ内燃機関(2)を始動させる必要がないので無駄に燃料を消費しないので有利である。
【0012】
なお、上記で括弧内に記した図面参照符号は、後述する実施形態において対応する構成要素等を参考のために例示したものである。
【発明の効果】
【0013】
本発明によれば、ロック状態を検出した場合に、第1変速機構及び第2変速機構における変速段の係合/非係合制御と、第1断接装置及び第2断接装置の少なくとも一方の係合状態を変更する両クラッチの締結制御とを行うことによって引き起こされるトランスミッションでの機械的な動作によって、ロック状態にあった電動機を回転させるようにした。ロック状態にあった電動機を回転できれば、同相通電を回避できる。上記制御に応じた機械的な動作により電動機を回転させる本発明では、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済み、またわざわざ内燃機関を始動させる必要がないので無駄に燃料を消費しない、という効果を奏する。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態における車両の概略的な接続構成図。
【図2】図1に示すモータ及びモータ制御手段を示す回路図。
【図3】図1に示すトランスミッションのスケルトン図。
【図4】図1に示す電子制御ユニットにより実行されるモータロック状態解放制御処理の概略を示すフローチャート。
【図5】図4におけるモータロック状態検出処理の一例を示すフローチャート。
【図6】図4におけるモータロック状態解放処理の一例を示すフローチャート。
【発明を実施するための形態】
【0015】
以下、この発明の実施の形態を添付図面に従って詳細に説明する。
【0016】
まず、本実施形態における車両の構成を説明する。図1は、本発明の一実施形態における車両の概略的な接続構成図である。本実施形態の車両1は、いわゆるハイブリッド車両であり、図1に示すように、駆動源としてのエンジン2及び電動機3と、電動機3を制御するための電動機制御手段20と、バッテリ30と、トランスミッション(変速機)4と、ディファレンシャル機構5と、左右のドライブシャフト6R、6Lと、左右の駆動輪7R、7Lとを備える。ここで、前記電動機3はモータでありモータジェネレータを含み、前記バッテリ30は蓄電器でありキャパシタを含む。また、前記内燃機関2はエンジンでありディーゼルエンジンやターボエンジンなどを含む。内燃機関(以下、エンジン)2と電動機(以下、モータ)3の回転駆動力は、トランスミッション4、ディファレンシャル機構5およびドライブシャフト6R、6Lを介して左右の駆動輪7R、7Lに伝達される。
【0017】
また、この車両1は、エンジン2、モータ3、トランスミッション4、ディファレンシャル機構5、電動機(以下、モータ)制御手段20およびバッテリ30をそれぞれ制御するための電子制御ユニット(ECU:Electronic Control Unit)10を備える。電子制御ユニット10は1つのユニットとして構成されるだけでなく、例えば内燃機関2を制御するためのエンジンECU、モータ3やモータ制御手段20を制御するためのモータジェネレータECU、バッテリ30を制御するためのバッテリECU、トランスミッション4を制御するためのATECUなど複数のECUから構成されてもよい。この実施形態に示す電子制御ユニット10は、エンジン2を制御するとともに、モータ3やバッテリ30、トランスミッション4を制御する。
【0018】
電子制御ユニット10は、各種の運転条件に応じて、モータ3のみを動力源とするモータ単独走行(EV走行)をするように制御したり、エンジン2のみを動力源とするエンジン単独走行をするように制御したり、エンジン2とモータ3の両方を動力源として併用する協働走行(HEV走行)をするように制御する。また、電子制御ユニット10は、公知の各種の制御パラメータに従って後述のモータロック状態の解放制御(図4参照)や、その他の各種の運転に必要な制御を行う。この実施形態においては、制御パラメータとして、例えばアクセルペダルの踏み込み量を検出するアクセルペダルセンサA1からのアクセルペダル開度、ブレーキペダルの踏み込み量を検出するプレーキペダルセンサA2からのブレーキペダル開度、ギヤ段(変速段)を検出するシフトセンサA3からのシフト位置、モータ3の回転数を検出する回転数センサA4からのモータ回転数、モータ制御手段20内のモータ3の各相に応じたスイッチング素子の温度を検出する温度センサA5からのインバータ素子温度、傾きを検知する傾斜角センサA6からの車両の傾斜角などの各種信号が入力されるようになっている。勿論、ここに記載した以外の信号が入力されてもよい。
【0019】
エンジン2は、燃料を空気と混合して燃焼することにより車両1を走行させるための駆動力を発生する内燃機関エンジンである。モータ3は、エンジン2とモータ3との協働走行やモータ3のみのEV走行の際には、バッテリ30の電気エネルギーを利用して車両1を走行させるための駆動力を発生するモータとして機能するとともに、車両1の減速時にはモータ3の回生により電力を発電する発電機としても機能する。このモータ3の回生時には、バッテリ30は、モータ3により発電された電力(回生エネルギー)により充電される。
【0020】
モータ3は、モータ制御手段20に接続される。図2は、図1に示すモータ3及びモータ制御手段20を示す回路図である。この図2に示すように、モータ制御手段20はU相アーム21と、V相アーム22と、W相アーム23とを含んでなるインバータ(電力変換器)であって、バッテリ30からの電源供給用のバッテリ電源ラインLに並列に設けられる。インバータ20の各相アームは、バッテリ電源ラインLに直列接続されたスイッチング素子から構成される。例えば、U相アーム21はスイッチング素子Q11,Q12からなり、V相アーム22は、スイッチング素子Q13,Q14からなり、W相アーム23は、スイッチング素子Q15,Q16からなる。スイッチング素子Q11〜Q16は、例えばIGBT(Insulated Gate Bipolar Transistor)、電力用MOS(Metal Oxide Semiconductor)トランジスタあるいは電力用バイポーラトランジスタ等の電力用半導体スイッチング素子である。これらのスイッチング素子Q11〜Q16に対しては、逆並列ダイオードD11〜D16がそれぞれ接続されている。こうしたスイッチング素子Q11〜Q16のオンオフは、電子制御ユニット10からのスイッチング制御信号によって制御される。
【0021】
モータ3は例えば界磁に永久磁石を利用した永久磁石式3相交流モータ等のブラシレスDCモータであり、固定子に設けられたU相コイル巻線U1、V相コイル巻線V1およびW相コイル巻線W1と、図示しない回転子とを含む。U相コイル巻線U1、V相コイル巻線V1およびW相コイル巻線W1の一端は、中性点N1で互いに接続され、その他端は、インバータ20のU相アーム21、V相アーム22およびW相アーム23とそれぞれ接続される。インバータ20は、電子制御ユニット10からのスイッチング制御信号に応答したスイッチング素子Q11〜Q16のオンオフ制御(スイッチング制御)により、バッテリ30及びモータ3の間での双方向の電力変換を行なう。具体的には、インバータ20は、電子制御ユニット10によるスイッチング制御に従って、バッテリ30からバッテリ電源ライン7を介して受ける直流電圧を3相交流電圧に変換し、その変換した3相交流電圧をモータ3へ出力する。これにより、モータ3は指定されたトルクを発生するように駆動される。また、インバータ20は、エンジン2の出力を受けてモータ3が発電した3相交流電圧を電子制御ユニット10によるスイッチング制御に従って直流電圧に変換し、その変換した直流電圧をバッテリ電源ライン7を介してバッテリ30へ出力することもできる。
【0022】
次に、本実施形態のトランスミッション4の構成を説明する。図3は、図1に示すトランスミッション4のスケルトン図である。ここに示すトランスミッション4は、前進7速、後進1速の平行軸式トランスミッションであり、乾式のデュアルクラッチ式トランスミッション(DCT)である。
【0023】
トランスミッション4には、エンジン2の機関出力軸をなすクランクシャフト(図示せず)およびモータ3に接続される内側メインシャフト100(第1入力軸)と、この内側メインシャフト100の外筒をなす外側メインシャフト101(第2入力軸)と、内側メインシャフト100にそれぞれ平行なセカンダリシャフト400(第2入力軸)、アイドルギヤ300、リバースシャフト500と、これらのシャフトに平行で出力軸をなすカウンタシャフト200とが設けられる。
【0024】
これらのシャフトのうち、外側メインシャフト101がアイドルギヤ300を介してリバースシャフト500およびセカンダリシャフト400に常時係合し、カウンタシャフト200がさらに図3では図示しないディファレンシャル機構5に常時係合するように配置される。
【0025】
また、トランスミッション4は、奇数段用の第1クラッチC1(第1断接装置)と、偶数段用の第2クラッチC2(第2断接装置)とを備える。第1および第2クラッチC1、C2は乾式のクラッチである。第1クラッチC1は内側メインシャフト100(第1入力軸)に結合される。第2クラッチC2は、外側メインシャフト101(第2入力軸の一部)に結合され、外側メインシャフト101上に固定されたギヤ48からアイドルギヤ300を介してリバースシャフト500およびセカンダリシャフト400(第2入力軸の一部)に連結される。
【0026】
内側メインシャフト100(第1入力軸)のモータ3よりの所定箇所にはプラネタリギヤ機構70が固定配置されており、プラネタリギヤ機構70のサンギヤ71はモータ3のロータに、キャリア73は3速駆動ギヤ43に、リングギヤ75は内側メインシャフト100(第1入力軸)にそれぞれ接続されている。内側メインシャフト100(第1入力軸)の外周には、図3において左側から順に、1速駆動ギヤとなるプラネタリギヤ機構70のキャリヤ73と、3速駆動ギヤ43と、7速駆動ギヤ47と、5速駆動ギヤ45が配置される。3速駆動ギヤ43、7速駆動ギヤ47、5速駆動ギヤ45はそれぞれ内側メインシャフト100に対して相対的に回転可能であり、また上記したようにギヤ43はプラネタリギヤ機構70のキャリヤ73に連結されている。更に、内側メインシャフト100上には、3速駆動ギヤ43と7速駆動ギヤ47との間に3−7速シンクロメッシュ機構(セレクタ機構)81が軸方向にスライド可能に設けられ、かつ、5速駆動ギヤ45に対応して5速シンクロメッシュ機構(セレクタ機構)82が軸方向にスライド可能に設けられる。所望のギヤ段に対応するシンクロメッシュ機構(セレクタ機構)をスライドさせて該ギヤ段のシンクロを入れることにより、該ギヤ段が内側メインシャフト100(第1入力軸)に連結される。メインシャフト100(第1入力軸)に関連して設けられたこれらのギヤ及びシンクロメッシュ機構によって、奇数段の変速段を実現するための第1変速機構が構成される。第1変速機構の各駆動ギヤは、カウンタシャフト200上に設けられた対応する従動ギヤに噛み合い、カウンタシャフト200を回転駆動する。
【0027】
セカンダリシャフト400(第2入力軸)の外周には、図3において左側から順に、2速駆動ギヤ42、6速駆動ギヤ46と、4速駆動ギヤ44とが相対的に回転可能に配置される。更に、セカンダリシャフト400上には、2速駆動ギヤ42と6速駆動ギヤ46との間に2−6速シンクロメッシュ機構83が軸方向にスライド可能に設けられ、かつ、4速駆動ギヤ44に対応して4速シンクロメッシュ機構(セレクタ機構)84が軸方向にスライド可能に設けられる。この場合も、所望のギヤ段に対応するシンクロメッシュ機構(セレクタ機構)をスライドさせて該ギヤ段のシンクロを入れることにより、該ギヤ段がセカンダリシャフト400(第2入力軸)に連結される。セカンダリシャフト400(第2入力軸)に関連して設けられたこれらのギヤ及びシンクロメッシュ機構によって、偶数段の変速段を実現するための第2変速機構が構成される。第2変速機構の各駆動ギヤも、カウンタシャフト200上に設けられた対応する従動ギヤに噛み合い、カウンタシャフト200を回転駆動する。なお、セカンダリシャフト400に固定されたギヤ49はアイドルギヤ300に結合しており、該アイドルギヤ300から外側メインシャフト101を介して第2クラッチC2に結合される。
【0028】
なお、第1変速機構において、任意の或る変速段を選択するとは、当該変速段に対応するギヤのシンクロが入れられて該ギヤが内側メインシャフト100(第1入力軸)に連結されることを意味する。また、この第1変速機構において、エンジン走行用の変速段(又は駆動ギヤ段)を実現するとは、該変速段(又は駆動ギヤ段)を上記のように選択した(シンクロを入れた)上で、対応する第1クラッチC1を係合させて内側メインシャフト100(第1入力軸)をエンジン出力軸に連結することを意味する。
【0029】
同様に、第2変速機構において、任意の或る変速段を選択するとは、当該変速段に対応するギヤのシンクロが入れられて該ギヤがセカンダリシャフト400(第2入力軸)に連結されることを意味する。また、この第2変速機構において、エンジン走行用の変速段(又は駆動ギヤ段)を実現するとは、該変速段(又は駆動ギヤ段)を上記のように選択した(シンクロを入れた)上で、対応する第2クラッチC2を係合させてセカンダリシャフト400(第2入力軸)をエンジン出力軸に連結することを意味する。
【0030】
リバースシャフト500の外周には、リバース駆動ギヤ46が相対的に回転可能に配置される。また、リバースシャフト500上には、リバース駆動ギヤ46に対応してリバースシンクロメッシュ機構85が軸方向にスライド可能に設けられ、また、アイドルギヤ300に係合するギヤ50が固定されている。リバース走行する場合は、シンクロメッシュ機構85のシンクロを入れて、第2クラッチC2を係合することにより、第2クラッチC2の回転が外側メインシャフト101及びアイドルギヤ300を介してリバースシャフト500に伝達され、リバース駆動ギヤ46が回転される。リバース駆動ギヤ46は内側メインシャフト100上のギヤ56に噛み合っており、リバース駆動ギヤ46が回転するとき内側メインシャフト100は前進時とは逆方向に回転する。内側メインシャフト100の逆方向の回転は、プラネタリギヤ機構70に連結したギヤ43を介してカウンタシャフト200に伝達される。また、リバース駆動ギヤ46はオイルポンプ駆動シャフト90上のギヤ91とも噛み合っていることから、第1クラッチC1を係合することによる内側メインシャフト100の回転又は第2クラッチC2を係合することによる外側メインシャフト101の回転がリバース駆動ギヤ46を介してオイルポンプ駆動シャフト90へと伝達されて、これによりオイルポンプ駆動シャフト90が回転することに伴って第1変速機構及び第2変速機構の各部に作動油を供給するオイルポンプOPが駆動される。
【0031】
カウンタシャフト200上には、図3において左側から順に、2−3速従動ギヤ51と、6−7速従動ギヤ52と、4−5速従動ギヤ53と、パーキング用ギヤ54と、ファイナル駆動ギヤ55とが固定的に配置される。ファイナル駆動ギヤ55は、ディファレンシャル機構5のディファレンシャルリングギヤ(図示せず)と噛み合うようになっており、これにより、カウンタシャフト200の出力軸の回転がディファレンシャル機構5の入力軸(つまり車両推進軸)に伝達される。
【0032】
また、プラネタリギヤ機構70のリングギヤ75とプラネタリギヤ72,74に係合するように、ワンウェイクラッチ41が設けられる。
【0033】
2−6速シンクロメッシュ機構83のシンクロスリープを左方向にスライドすると、2速駆動ギヤ42がセカンダリシャフト400に結合され、右方向にスライドすると、6速駆動ギヤ46がセカンダリシャフト400に結合される。また、4速シンクロメッシュ機構84のシンクロスリープを右方向にスライドすると、4速駆動ギヤ44がセカンダリシャフト400に結合される。このように偶数の駆動ギヤ段を選択した状態で、第2クラッチC2を係合することにより、トランスミッション4は偶数の変速段(2速、4速、又は6速)に設定される。
【0034】
3−7速シンクロメッシュ機構81のシンクロスリープを左方向にスライドすると、3速駆動ギヤ43が内側メインシャフト100に結合されて3速の変速段が選択され、右方向にスライドすると、7速駆動ギヤ47が内側メインシャフト100に結合されて7速の変速段が選択される。また、5速シンクロメッシュ機構82のシンクロスリープを右方向にスライドすると、5速駆動ギヤ45が内側メインシャフト100に結合されて5速の変速段が選択される。シンクロメッシュ機構81、82がどのギヤ43、47、45も選択していない状態では、プラネタリ機構70のキャリア73の回転がこれに連結したギヤ43を介してカウンタシャフト200に伝達され、1速の変速段が選択されることになる。奇数の駆動ギヤ段を選択した状態で第1クラッチC1を係合することにより、トランスミッション4は奇数の変速段(1速、3速、5速、又は7速)に設定される。
【0035】
トランスミッション4で実現すべき変速段の決定及び該変速段を実現するための制御(第1変速機構及び第2変速機構における変速段の選択すなわちシンクロの切り替え制御と、第1クラッチ及び第2クラッチの係合及び係合解除の制御等)は、公知のように、運転状況に従って電子制御ユニット10によって実行されるが、本実施形態では特に運転状況としてモータロック状態(ストール状態)にある場合に、従来にない変速段の切り替えや第1クラッチ及び第2クラッチの係合及び係合解除を含むモータロック状態解放のための制御を行い、モータロック状態を強制的に解放することによって、インバータ20のスイッチング素子(図2参照)の熱による障害の発生を防止しようとするものである。以下、説明する。
【0036】
電子制御ユニット10によって実行されるモータロック状態の解放のための制御例について、図4〜図6を参照して説明する。図4に示すモータロック状態の解放制御処理は、モータ3のみを用いた車両走行であるEV走行(モータ単独走行)に切り替えることが決定されたときに開始されて、EV走行中は繰り返し実行される。EV走行中にはモータ3に対し一定以上の電流が供給され、モータ3はトルクを発生している状態にある。
【0037】
モータロック状態の解放制御処理は、大別して、モータロック状態の検出処理S1(ロック状態検出手段)、モータロック状態の解放処理S2(ロック状態解放手段)を含む。まず、モータロック状態の検出処理S1(ロック状態検出手段)では、モータ3の回転が外力によってロックされた状態であるか否かを判定する。図5は、モータロック状態検出処理S1の具体例を示す。
【0038】
ステップS11では、制御パラメータとして取得される車両の傾斜角及びモータ回転数に従って、車両の傾きが所定値以上であり且つモータ3の回転数が所定の回転数以下であるか否かを判定する。すなわち、モータ3へ一定以上の電流が供給されているにも関わらず、車両が坂道の途中で静止したまま前後に車両が全く動かない状態(モータ3がロック状態となる態様の1つ)であるか否かを判定する。車両の傾きが所定値以上であり且つモータ3の回転数が所定の回転数以下であると判定した場合には(ステップS11のYES)、モータロック状態にあると決定する(ステップS15)。
【0039】
ステップS12では、制御パラメータとして取得されるアクセルペダル開度及びブレーキペダル開度に従って、これらの開度が共に所定値以上であるか否かを判定する。すなわち、運転者がアクセルペダル及びブレーキペダルを同時に操作した両踏みにて車両が停止している状態(モータ3がロック状態となる態様の1つ)であるか否かを判定する。アクセルペダル開度及びブレーキペダル開度が共に所定値以上であると判定した場合つまり両踏みである場合には(ステップS12のYES)、モータロック状態にあると決定する(ステップS15)。
【0040】
ステップS13では、モータ制御手段20によるモータ3の何れかの相の固定子巻線に所定時間にわたって通電が行われた後に、モータ3の回転数が例えば0を含む所定の回転数以下であるか否かを判定する。モータ3の回転数が所定の回転数以下であると判定した場合には(ステップS13のYES)、モータロック状態にあると決定する(ステップS15)。すなわち、この場合にモータ3の回転数が所定の回転数以下であると、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子に引き続き通電電流が流れ続けて過剰な局部発熱が生じ得る恐れがあるので、モータロック状態と判断する。
【0041】
ステップS14では、制御パラメータとして取得されるインバータ素子温度に従って、モータ制御手段20により通電されるモータ3の各相の固定子巻線に対応するインバータ20の各スイッチング素子の温度の少なくともいずれか1つが所定の温度以上に上昇しているか否かを判定する。前記所定の温度は予め設定された温度であって、モータ3の経年劣化に影響しない温度である。各スイッチング素子の温度の少なくともいずれか1つが所定の温度以上に上昇していると判定した場合には(ステップS14のYES)、モータロック状態にあると決定する(ステップS15)。すなわち、この場合には既に、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子のみに通電電流が流れ続けて過剰な局部発熱が生じている状態であるので、モータロック状態と判断する。
【0042】
上記ステップS11〜S14の全ての処理において「NO」と判定された場合には、モータロック状態にないと決定する(ステップS16)。
【0043】
図4に戻り、モータロック状態の解放処理S2(ロック状態解放手段)では、トランスミッション4内において外乱を生じさせることによって、ロック状態にあるモータ3を少なくとも微小な回転角だけでも強制的に回転させる(モータロック状態を解放すると言う)ようにする。ロック状態にあるモータ3を少しだけでも強制的に回転させることによって、通電電流が流れ続けており過剰な局部発熱が生じる恐れのあったインバータ20内の1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が変更される(切り替えられる)。図6は、モータロック状態解放処理S2の具体例を示す。
【0044】
ステップS21は、モータロック状態であるか否かを判定する。この判定は上記したモータロック状態検出処理S1でのモータロック状態であるかないかの決定に基づく(図5のステップS15及びS16参照)。モータロック状態でないと判定した場合には(ステップS21のYES)、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のスイッチング素子に引き続き通電電流が流れ続けて過剰な局部発熱が生じ得る恐れがないので、後述するようなモータロック状態を解放するための各種処理(ステップS22〜S26)を実行することなしに当該処理を終了する。
【0045】
他方、モータロック状態であると判定した場合には(ステップS21のNO)、モータ3の何れかの相の固定子巻線及びこの通電相に対応するインバータ20のあるスイッチング素子のみに引き続き通電電流が流れ続け、そのままでは前記スイッチング素子に過剰な局部発熱が生じ得る恐れがあるので、それを避けるべく以下に示すようなモータロック状態を解放するための各種処理(ステップS22〜S25)を実行する。
【0046】
ステップ22は、1速駆動ギヤから2速駆動ギヤへと変速段を変更するようトランスミッション4を制御する。具体的には、モータ3の回転に応じてキャリア73に1速相当のトルクを発生させるためにリングギヤ75をロックしていたワンウェイクラッチ41(オン状態)を、リングギヤ75をロックしていない状態(オフ状態)とする。また、偶数段の変速段を実現する第2変速機構において、2−6速シンクロメッシュ機構83のシンクロスリープを左方向にスライドして2速駆動ギヤ42をセカンダリシャフト400に結合する制御を行う。これにより、トランスミッション4において1速の変速段が選択されていた状態を抜けて2速の変速段が選択されている状態になる。
【0047】
ステップS23は、奇数段に機械的動力を伝達する第1のクラッチC1と、偶数段に機械的動力を伝達する第2のクラッチC2の少なくとも一方を係合制御して、第1のクラッチC1と第2のクラッチC2の両方共を完全締結状態(つまり両掴み状態)とする。モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとは、両掴み制御前においてはお互いが1つの同じ伝達経路、具体的には内側メインシャフト100、3速駆動ギヤ43、カウンタシャフト200を辿っており、それらが均衡していたためにモータロック状態が生じていた。しかし、上記両掴み制御を行うことによれば、モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとを、デュアルクラッチ機構を介した2つの異なる伝達経路にそれぞれ分散させることができるようになる。したがって、第1のクラッチC1と第2のクラッチC2を両掴み状態にすると、両掴み制御前のモータロック状態において均衡していたモータ3から入力される1速相当のトルクと、駆動輪から入力される外力によるトルクとのバランスを僅かに崩すことが可能となる。そうすると、僅かではあるがモータ3の回転が許容されることになる。全く回転していなかったモータロック状態から僅かでもモータ3を回転できれば、モータロック状態において通電電流が流れ続けていた1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。
【0048】
さらに、第1のクラッチC1と第2のクラッチC2を両掴み状態とした場合には、内側メインシャフト100又は外側メインシャフト101の回転がリバース駆動ギヤ46を介してオイルポンプ駆動シャフト90へと伝達され、オイルポンプOPを駆動することになる。オイルポンプOPが駆動されると、その機械的な動作に従ってモータ3に振動が生じる。モータ3が振動することによりモータロック状態が解除されて、モータロック状態において通電電流が流れ続けていた1つのあるスイッチング素子から電流の流れていなかった他のスイッチング素子のいずれか1つへと電流の流れる経路が切り替えられるので、スイッチング素子の熱による障害の発生を防止することができる。
【0049】
上記のように第1のクラッチC1と第2のクラッチC2の両方を共に完全締結状態とした両掴みにすることで、モータロック状態を解放することはできる。ただし、許容されるモータ3の回転は本当に僅かなものである。そこで、より確実にモータ3を回転させるべく、完全締結状態にある第1のクラッチC1及び第2のクラッチC2の一方を半クラッチ状態に制御する(ステップS24)。具体的には、偶数段に機械的動力を伝達する第2のクラッチC2の締結力を減少させることにより、第2のクラッチC2をすべり(スリップ)が発生している状態とする。これによれば、デュアルクラッチ機構を介した2つの異なる伝達経路にそれぞれ分散されたうちのモータ3から入力される1速相当のトルクが、前記第2のクラッチC2のすべりに従って抜けることとなる。これにより、モータ3から入力される1速相当のトルクと駆動輪から入力される外力によるトルクとのバランスをより大きく崩すことができるので、より確実にモータ3の回転を許容することになる。したがって、駆動輪が固定された状態にあってもモータ3は回転できるので、同相通電を回避することができる。
【0050】
ステップS25は、エンジン2を押し掛け始動する。すなわち、前記第1クラッチC1及び第2クラッチC2を共に完全締結状態としてから第2クラッチC2を半クラッチ状態とすることによりモータ3の回転許容量をより拡大することができ、またモータ3から入力されたトルクをエンジン2に伝達することが可能となるので、エンジン2を押し掛け始動する。エンジン2を始動することで、モータ3から入力される1速相当のトルクだけでなくエンジン2から入力されるトルクを用いて、駆動輪から入力される外力によるトルクとのバランスを保つことができる。したがって、モータ3の負担を減少できるので恒常的に同相通電を回避することができるようになる。
【0051】
なお、上述した実施例では、第2のクラッチC2の締結力を減少させて第2のクラッチC2にすべり(スリップ)が発生させた後に、エンジン2を始動させるようにしたが(ステップS24,S25参照)、これに限らず、エンジン2を始動させなくともよい。ただし、その場合、第2のクラッチC2の締結力を一時的に減少してモータ3を空転させた後に、再度第2のクラッチC2を完全締結させるとよい。また、こうした第2のクラッチC2の締結制御を繰り返し行って、そのたびに通電相の切り替えが行われるようにするとよい。
【0052】
以上のように、本発明ではモータロック状態を検出した場合に、第1変速機構及び第2変速機構における変速段の係合/非係合制御(変速制御)と、第1クラッチC1及び第2クラッチC2の両クラッチの締結制御とを行うことにより、トランスミッション4を機械的に動作させる。特には、第1クラッチC1及び第2クラッチC2の両クラッチを同時に締結する、さらには同時に締結したうちの第2クラッチC2を半クラッチ状態にするといった通常の走行制御時には行わない特別な制御を行うことで、一時的にでも互いがつり合っていたモータ3から入力されるトルクと外力により駆動輪から入力される外力によるトルクとのバランスを僅かに崩すことができ、こうしてモータ3を僅かでも回転させることで同相通電を防止するようにしている。上記制御によるトランスミッション4の機械的な動作においては、駆動輪から入力される外力によるトルクの抜ける時間が非常に少なくて済む、という利点がある。また、上記制御はエンジン2を始動させる必要がなくても実現することができるので、無駄に燃料を消費しない。
【符号の説明】
【0053】
1 ハイブリッド車両
2 エンジン
3 電動機(モータ)
4 トランスミッション(変速機)
5 ディファレンシャル機構
6R,6L ドライブシャフト
7R,7L 駆動輪
10 電子制御ユニット
20 電動機(モータ)制御手段(インバータ)
21 U相アーム
22 V相アーム
23 W相アーム
30 バッテリ
41 ワンウェイクラッチ
70 プラネタリギヤ機構
71 サンギヤ
72,74 プラネタリギヤ
73 キャリア
75 リングギヤ
C1 第1クラッチ
C2 第2クラッチ
OP オイルポンプ
Q11〜Q32 スイッチング素子
L バッテリ駆動ライン
90 オイルポンプ駆動シャフト
100 内側メインシャフト
101 外側メインシャフト
200 カウンタシャフト
300 アイドルギヤ
400 セカンダリシャフト
500 リバースシャフト
【特許請求の範囲】
【請求項1】
駆動源に内燃機関と電動機とを有してなり、
前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に接続された第1入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸と駆動輪とを係合させることが可能な第1変速機構と、
前記内燃機関出力軸からの機械的動力を第2入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸と駆動輪とを係合させることが可能な第2変速機構と、
前記内燃機関出力軸と前記第1入力軸との係合及び非係合を切り替え可能な第1断接手段と、
前記内燃機関出力軸と前記第2入力軸との係合及び非係合を切り替え可能な第2断接手段と、
前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段及び第2断接手段の係合状態とを制御可能な制御装置と
を備えたハイブリッド車両において、
前記制御装置は、
前記電動機のロック状態を検出するロック検出手段と、
前記ロック検出手段による前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放すると共に、前記第1断接手段又は前記第2断接手段の少なくとも一方の係合状態を変更するロック状態解放手段と
を含むことを特徴とするハイブリッド車両。
【請求項2】
前記ロック状態解放手段は、前記第1断接手段の係合状態を前記内燃機関出力軸と前記第1入力軸とを係合させた締結状態に、前記第2断接手段の係合状態を前記内燃機関出力軸と前記第2入力軸とを係合させた締結状態にすることを特徴とする請求項1に記載のハイブリッド車両。
【請求項3】
前記ロック状態解放手段は、さらに前記締結状態にされた第1断接手段及び第2断接手段の少なくとも一方の締結力を低減することを特徴とする請求項2に記載のハイブリッド車両。
【請求項4】
前記ロック検出手段は、電動機のみを用いた車両走行であるモータ走行中に前記ロック状態の検出を行うことを特徴とする請求項1乃至3のいずれかに記載のハイブリッド車両。
【請求項5】
前記ロック状態解放手段は、前記第1断接手段及び前記第2断接手段の少なくとも一方の係合状態を変更することに応じて前記内燃機関を押し掛け始動することを特徴とする請求項4に記載のハイブリッド車両。
【請求項6】
前記ロック検出手段は、車両が所定角度よりも傾斜しておりかつ前記電動機の回転数が予め決められている回転数以下である場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項7】
前記ロック検出手段は、前記電動機の何れかの相の固定子巻線のみに所定時間に亘って連続通電されておりかつ前記電動機の回転数が予め決められている回転数以下である場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項8】
前記ロック検出手段は、当該車両のアクセルペダル及びブレーキペダルの両方が同時に操作された状態にある場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項9】
前記ロック検出手段は、前記電動機の複数の相の各固定子巻線に対応して設けられているスイッチング素子の少なくともいずれか1つの温度が予め決められている温度よりも上昇した場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項10】
前記ロック状態解放手段は、前記第1変速機構の第1入力軸及び前記第2変速機構の第2入力軸の少なくとも一方に係合されたオイルポンプを駆動することを特徴とする請求項1乃至9のいずれかに記載のハイブリッド車両。
【請求項11】
駆動源に内燃機関と電動機とを有するハイブリッド車両の制御方法であって、
前記ハイブリッド車両は、
前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に係合する第前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に接続された第1入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸と駆動輪とを係合させることが可能な第1変速機構と、
前記内燃機関出力軸からの機械的動力を第2入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸と駆動輪とを係合させることが可能な第2変速機構と、
前記内燃機関出力軸と前記第1入力軸との係合及び非係合を切り替え可能な第1断接手段と、
前記内燃機関出力軸と前記第2入力軸との係合及び非係合を切り替え可能な第2断接手段と、
前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段及び第2断接手段の係合状態とを制御可能な制御装置と
を備え、
前記制御装置は、
電動機のみを用いた車両走行中に前記電動機のロック状態を検出するステップと、
前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放するステップと、
前記第1断接手段の係合状態を前記内燃機関出力軸と前記第1入力軸とを係合させた締結状態に、前記第2断接手段の係合状態を前記内燃機関出力軸と前記第2入力軸とを係合させた締結状態にする、または前記第1断接手段及び前記第2断接手段の両方を前記締結状態にしたうえでさらに前記締結状態にされた第1断接手段及び第2断接手段の少なくとも一方の締結力を低減するステップと
を備えるハイブリッド車両の制御方法。
【請求項1】
駆動源に内燃機関と電動機とを有してなり、
前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に接続された第1入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸と駆動輪とを係合させることが可能な第1変速機構と、
前記内燃機関出力軸からの機械的動力を第2入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸と駆動輪とを係合させることが可能な第2変速機構と、
前記内燃機関出力軸と前記第1入力軸との係合及び非係合を切り替え可能な第1断接手段と、
前記内燃機関出力軸と前記第2入力軸との係合及び非係合を切り替え可能な第2断接手段と、
前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段及び第2断接手段の係合状態とを制御可能な制御装置と
を備えたハイブリッド車両において、
前記制御装置は、
前記電動機のロック状態を検出するロック検出手段と、
前記ロック検出手段による前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放すると共に、前記第1断接手段又は前記第2断接手段の少なくとも一方の係合状態を変更するロック状態解放手段と
を含むことを特徴とするハイブリッド車両。
【請求項2】
前記ロック状態解放手段は、前記第1断接手段の係合状態を前記内燃機関出力軸と前記第1入力軸とを係合させた締結状態に、前記第2断接手段の係合状態を前記内燃機関出力軸と前記第2入力軸とを係合させた締結状態にすることを特徴とする請求項1に記載のハイブリッド車両。
【請求項3】
前記ロック状態解放手段は、さらに前記締結状態にされた第1断接手段及び第2断接手段の少なくとも一方の締結力を低減することを特徴とする請求項2に記載のハイブリッド車両。
【請求項4】
前記ロック検出手段は、電動機のみを用いた車両走行であるモータ走行中に前記ロック状態の検出を行うことを特徴とする請求項1乃至3のいずれかに記載のハイブリッド車両。
【請求項5】
前記ロック状態解放手段は、前記第1断接手段及び前記第2断接手段の少なくとも一方の係合状態を変更することに応じて前記内燃機関を押し掛け始動することを特徴とする請求項4に記載のハイブリッド車両。
【請求項6】
前記ロック検出手段は、車両が所定角度よりも傾斜しておりかつ前記電動機の回転数が予め決められている回転数以下である場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項7】
前記ロック検出手段は、前記電動機の何れかの相の固定子巻線のみに所定時間に亘って連続通電されておりかつ前記電動機の回転数が予め決められている回転数以下である場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項8】
前記ロック検出手段は、当該車両のアクセルペダル及びブレーキペダルの両方が同時に操作された状態にある場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項9】
前記ロック検出手段は、前記電動機の複数の相の各固定子巻線に対応して設けられているスイッチング素子の少なくともいずれか1つの温度が予め決められている温度よりも上昇した場合に、前記電動機がロック状態にあると決定することを特徴とする請求項1乃至5のいずれかに記載のハイブリッド車両。
【請求項10】
前記ロック状態解放手段は、前記第1変速機構の第1入力軸及び前記第2変速機構の第2入力軸の少なくとも一方に係合されたオイルポンプを駆動することを特徴とする請求項1乃至9のいずれかに記載のハイブリッド車両。
【請求項11】
駆動源に内燃機関と電動機とを有するハイブリッド車両の制御方法であって、
前記ハイブリッド車両は、
前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に係合する第前記内燃機関出力軸及び前記電動機からの機械的動力を該電動機に接続された第1入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第1入力軸と駆動輪とを係合させることが可能な第1変速機構と、
前記内燃機関出力軸からの機械的動力を第2入力軸で受け、複数の変速段のうちいずれか1つを係合して前記第2入力軸と駆動輪とを係合させることが可能な第2変速機構と、
前記内燃機関出力軸と前記第1入力軸との係合及び非係合を切り替え可能な第1断接手段と、
前記内燃機関出力軸と前記第2入力軸との係合及び非係合を切り替え可能な第2断接手段と、
前記第1変速機構及び第2変速機構における変速段の係合状態と、前記第1断接手段及び第2断接手段の係合状態とを制御可能な制御装置と
を備え、
前記制御装置は、
電動機のみを用いた車両走行中に前記電動機のロック状態を検出するステップと、
前記ロック状態の検出時に、前記第2変速機構のいずれか1つの変速段を係合する一方で前記第1変速機構の変速段を解放するステップと、
前記第1断接手段の係合状態を前記内燃機関出力軸と前記第1入力軸とを係合させた締結状態に、前記第2断接手段の係合状態を前記内燃機関出力軸と前記第2入力軸とを係合させた締結状態にする、または前記第1断接手段及び前記第2断接手段の両方を前記締結状態にしたうえでさらに前記締結状態にされた第1断接手段及び第2断接手段の少なくとも一方の締結力を低減するステップと
を備えるハイブリッド車両の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−28231(P2013−28231A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−164482(P2011−164482)
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月27日(2011.7.27)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]