
ハイブリッド車両
【課題】運転者の操作により変速が行われた際に、運転者が自然な変速感を体感することができるハイブリッド車両を提供すること。
【解決手段】ハイブリッド車両20は、エンジン22と、MG1と、遊星歯車機構30と、MG2と、バッテリ50と、エンジン22の運転制御、MG1およびMG2のそれぞれに対して力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行うハイブリッド制御装置(エンジンECU24、モータECU40、バッテリECU52、ハイブリッドECU70)とを備える。ハイブリッド制御装置は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、要求駆動力設定部70aにより要求駆動力Tnをトルク比tに基づいた値に変更する。
【解決手段】ハイブリッド車両20は、エンジン22と、MG1と、遊星歯車機構30と、MG2と、バッテリ50と、エンジン22の運転制御、MG1およびMG2のそれぞれに対して力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行うハイブリッド制御装置(エンジンECU24、モータECU40、バッテリECU52、ハイブリッドECU70)とを備える。ハイブリッド制御装置は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、要求駆動力設定部70aにより要求駆動力Tnをトルク比tに基づいた値に変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両に関し、特に、内燃機関と、第一の電動発電機と、内燃機関と第一の電動発電機からの動力を合成または分配する動力合成分配機構と、動力合成分配機構と駆動輪の間に設けられた第二の電動発電機とを備えるハイブリッド車両に関するものである。
【背景技術】
【0002】
ハイブリッド車両には、たとえば特許文献1に示すように、動力合成分配機構である遊星歯車機構のキャリア、サンギヤ、リングギヤに内燃機関であるエンジン、第一の電動発電機であるMG1、駆動軸をそれぞれ接続し、駆動軸に第二の電動発電機であるMG2を接続したものがある。従来のハイブリッド車両は、エンジンとMG1との動力を遊星歯車機構により合成・分配し、また遊星歯車機構によりMG1を回転させることでエンジンを回転させることができるものである。さらに、非駆動時にはMG2において回生制御を行い、回生した電力はMG2に連結された蓄電装置であるバッテリに蓄電される。
【0003】
また、ハイブリッド車両は、ハイブリッド車両を制御するためのハイブリッド制御装置を備えている。ハイブリッド制御装置は、動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行う。ここで、ハイブリッド制御装置は、基本的に運転者が要求する要求駆動力を設定し、設定された要求駆動力に基づいてエンジンの目標エンジン回転数を設定し、設定された要求駆動力および設定された目標エンジン回転数に基づいて動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行う。また、ハイブリッド制御装置は、予め出力回転数である車速V(ペラシャフト回転数)を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中のパラメータに基づいて走行中の目標変速段を設定する。
【0004】
ここで、ハイブリッド車両には、運転者の操作により設定された目標変速段の固定変更を行うことができるシーケンシャルシフトを備えるものがある。シーケンシャルシフトを備えるハイブリッド車両の場合では、運転者が操作するシフトレバーがシーケンシャルシフトモードとなる位置に変更されると、ハイブリッド制御装置がシーケンシャルシフトモードであると判定し、設定された目標変速段を基準として、シーケンシャルシフトモードにおける運転者の操作による操作変速段を設定する。ここで、ハイブリッド制御装置は、シーケンシャルシフトモード時では設定された操作変速段に基づいて目標エンジン回転数を設定し、設定された目標エンジン回転数に基づいて動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行うこととなる。従って、運転者がシフトレバーを操作することにより、操作変速段が変更、すなわち変速が行われると、目標エンジン回転数は、変速後の操作変速段に基づいて設定されたエンジンのエンジン回転数が目標エンジン回転数まで変化する。
【0005】
【特許文献1】特開2006−256595号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記特許文献1では、操作変速段が変更されると、変更後の操作変速段に基づいて設定された目標エンジン回転数となるように、エンジンのエンジン回転数が制御されることで、運転者の操作による変速時、運転者に変速感を伝える。そのため、有段の自動変速機を搭載する車両の変速感をハイブリッド車両の運転者に疑似体験させることで違和感を与えるのを抑制するものである。
【0007】
ところで、上記特許文献1では、まず出力回転数を含む複数のパラメータにより目標駆動力を設定し、変速後の変速段に基づいてエンジンの目標エンジン回転数を設定している。つまり、運転者の操作によるシフトチェンジ時にエンジン回転数を変化させているものである。そして要求駆動力は、設定された目標エンジン回転数に基づいて設定している。このため、変速における駆動力変化が乏しく、変速に違和感が生じる恐れがある。
【0008】
本発明の目的は、運転者の操作により変速が行われた際に、運転者が自然な変速感を体感することができるハイブリッド車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、本発明は、内燃機関と、第一の電動発電機と、前記内燃機関および前記第一の電動発電機からの動力を合成または分配する動力合成分配機構と、前記動力合成分配機構と駆動輪の間に設けられた第二の電動発電機と、前記第一の電動発電機および前記第二の電動発電機との間で電力の授受を行う蓄電装置と、前記内燃機関の運転制御、前記第一の電動発電機および前記第二の電動発電機のそれぞれに対して力行制御および回生制御、前記蓄電装置の蓄電制御および放電制御を行うハイブリッド制御装置と、を備えたハイブリッド車両において、前記ハイブリッド制御装置は、運転者が要求する要求駆動力を設定する要求駆動力設定手段と、前記設定された要求駆動力に基づいて前記内燃機関の目標機関回転数を設定する目標機関回転数設定手段と、予め出力回転数を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中の前記パラメータに基づいて前記走行中の目標変速段を設定する目標変速段設定手段と、運転者の操作により操作変速段の固定変更を行う変速段操作モードであるか否かを判定する変速段操作モード判定手段と、前記設定された目標変速段を基準として、変速段操作モードにおける前記運転者の操作による操作変速段を設定する操作変速段設定手段と、前記設定された操作変速段が変更されたか否かを判定する操作変速段変更判定手段と、を有するとともに、前記変速段操作モード判定手段により前記変速段操作モードであると判定されると、前記目標機関回転数設定手段が前記設定された操作変速段に基づいて前記目標機関回転数を設定し、前記要求駆動力設定手段が前記設定された要求駆動力を前記操作変速段に基づいて変更することを特徴とする。
【0010】
また、上記ハイブリッド車両において、前記ハイブリッド制御装置は、前記設定された操作変速段および前記出力回転数に基づいた抵抗駆動力を設定する抵抗駆動力設定手段をさらに有し、前記要求駆動力設定手段は、前記設定された要求駆動力を前記設定された抵抗駆動力に基づいて変更することが好ましい。
【0011】
また、上記ハイブリッド車両において、前記要求駆動力設定手段は、前記設定された操作変速段における抵抗駆動力と、前記操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて前記設定された要求駆動力を変更することが好ましい。
【0012】
また、上記ハイブリッド車両において、前記要求駆動力設定手段は、前記抵抗駆動力比を0未満の場合は0とし、1を超える場合は1とすることが好ましい。
【発明の効果】
【0013】
本発明によれば、設定された要求駆動力を操作変速段に基づいて、例えば設定された操作変速段における抵抗駆動力と、操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて要求駆動力を変更するので、要求駆動力が各操作変速段に対応して変化する。従って、設定された操作変速段が変速された際には、要求駆動力が変速後の操作変速段に対応して変更されるので、変速時に駆動力が変化し、運転者に自然な変速感を体感させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態につき図面を参照しつつ詳細に説明する。なお、下記の実施形態により、本発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0015】
図1から図10を参照して、本実施形態にかかるハイブリッド車両について説明する。図1は、実施形態にかかるハイブリッド車両の概略構成を示すブロック図である。図2および図3は、実施形態にかかるハイブリッド車両の基本動作フローを示す図である。図4は、実施形態にかかるハイブリッド車両の要求駆動力を設定するためのマップを示す図である。図5は、実施形態にかかるハイブリッド車両の目標エンジン回転数を設定するためのマップを示す図である。図6は、実施形態にかかるハイブリッド車両の目標変速段を設定するためのマップを示す図である。図7は、実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。図8は、実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。図9は、実施形態にかかるハイブリッド車両のシフトレバーとシフトポジションを示す図である。図10は、実施形態にかかるハイブリッド車両のエンブレ駆動力を設定するためのマップを示す図である。
【0016】
本実施形態は、アクセル開度PAPと出力回転数である車速V(ペラシャフト回転数)から決まる要求ペラシャフトトルクである要求駆動力Tnを設定し、それに基づき目標エンジン回転数Neoを設定し、またマップを参照して目標変速段Xを設定する。ここで、シーケンシャルシフトを搭載している場合、ハイブリッド制御装置が以下の動作を行うものである。
【0017】
シーケンシャルシフトモード時では、運転者の操作により固定あるいは変速された操作変速段Yに基づいて目標エンジン回転数Neoを設定し、設定された要求駆動力Tnを抵抗駆動力の抵抗駆動力比、すなわちエンブレ駆動力Teのトルク比tに基づいて変更する。そして、設定された操作変速段Y(操作変速比)および設定された要求駆動力Tnに基づき動力源を制御する。
【0018】
ここで、トルク比tは、操作変速段のうち最低段である1速段でのエンブレ駆動力Tebと現在の操作変速段YでのエンブレトルクTeyとの比(Tey/Teb)である。なお、トルク比tが0未満の場合は0とし、1を超える場合は1とする。
【0019】
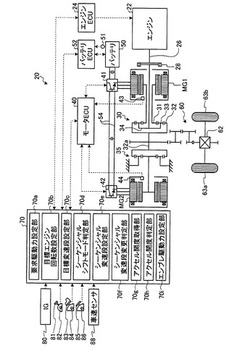
本実施形態に係るハイブリッド車両20は、図1に示すように、内燃機関であるエンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して接続された3軸式の動力合成分配機構である遊星歯車機構30と、遊星歯車機構30に接続された発電可能な第一の電動発電機であるMG1と、遊星歯車機構30に接続された駆動軸としてのリングギヤ軸32aに取り付けられた減速ギヤ35と、この減速ギヤ35に接続された、すなわち遊星歯車機構30と駆動輪63a、63bの間に設けられた第二の電動発電機であるMG2と、ハイブリッド車両全体をコントロールするハイブリッド制御装置の一部であるハイブリッド用電子制御ユニット(以下、ハイブリッドECUという)70とを備える。
【0020】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関であり、エンジン22の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)24により燃料噴射制御や点火制御、吸入空気量調節制御などの運転制御を受けている。また、エンジン22には、回転数検出手段であるエンジン回転数検出センサ(図示せず)が備えられている。検出されたエンジン回転数は、エンジンECU24に出力される。つまり、エンジンECU24は、内燃機関の機関回転数であるエンジン22のエンジン回転数を取得する回転数取得手段として機能する。また、エンジンECU24は、ハイブリッド制御装置の一部を構成するものであり、またハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータ、特に取得したエンジン回転数をハイブリッドECU70に出力する。
【0021】
遊星歯車機構30は、動力合成分配機構であり、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行なう遊星歯車機構として構成されている。
【0022】
遊星歯車機構30は、キャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはMG1が、リングギヤ32にはリングギヤ軸32aを介して減速ギヤ35がそれぞれ連結されており、MG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配し、MG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるMG1からの動力を合成してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構60およびデファレンシャルギヤ62を介して、最終的には車両の駆動輪63a、63bに出力される。つまり、遊星歯車機構30は、エンジン22およびMG1からの動力を合成または分配するものである。
【0023】
MG1は、第一の電動発電機であり、MG2は第二の電動発電機である。MG1およびMG2は、いずれも発電機として駆動することができると共に電動機として駆動できる周知の同期発電電動機として構成されており、インバータ41、42を介してバッテリ50と電力の授受を行う。インバータ41、42とバッテリ50とを接続する電力ライン54は、各インバータ41、42が共用する正極母線および負極母線として構成されており、MG1、MG2のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ50は、MG1、MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、MG1、MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。
【0024】
MG1およびMG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40は、ハイブリッド制御装置の一部を構成するものであり、MG1、MG2を発電機として駆動制御する回生制御、および電動機として駆動制御する力行制御を行う。モータECU40には、MG1、MG2を駆動制御するために必要な信号、例えばMG1、MG2の回転子の回転位置を検出する回転位置検出センサ43、44からの信号や図示しない電流センサにより検出されるMG1、MG2に印加される相電流などが入力されており、モータECU40からは、インバータ41、42へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号によってMG1、MG2を駆動制御すると共に必要に応じてMG1、MG2の駆動状態に関するデータをハイブリッドECU70に出力する。
【0025】
バッテリ50は、MG1およびMG2との間で電力の授受を行うものであり、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって制御されている。バッテリECU52は、ハイブリッド制御装置の一部を構成するものである。バッテリECU52は、バッテリ50に電力を蓄電する蓄電制御とバッテリ50が電力を放電する放電制御を行う。バッテリECU52は、バッテリ50を制御するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧、バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流、バッテリ50に取り付けられた温度センサ51からの電池温度Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッドECU70に出力する。なお、バッテリECU52は、バッテリ50の蓄電量、本実施形態ではバッテリ残量(SOC)を推定する蓄電量推定部を備え、バッテリ50を制御するために電流センサにより検出された充放電電流の積算値に基づいてバッテリ残量(SOC)を演算し、推定している。つまり、バッテリECU52は、蓄電装置の蓄電量であるバッテリ50のバッテリ残量(SOC)を取得する蓄電量取得手段として機能する。
【0026】
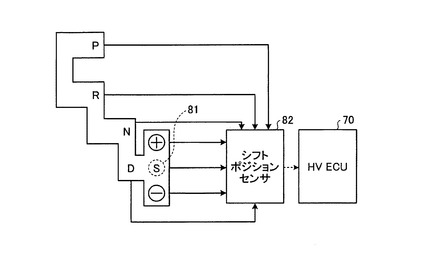
ハイブリッドECU70は、ハイブリッド制御装置の一部を構成するものである。ハイブリッドECU70は、CPU(図示せず)を中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROM(図示せず)と、データを一時的に記憶するRAM(図示せず)と、入出力ポートおよび通信ポート(図示せず)とを備える。ハイブリッドECU70には、イグニッションスイッチ80からのイグニッション信号、シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度PAP、ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP、車速センサ88からの車速V(ペラシャフト回転数)などが入力ポートを介して入力されている。ハイブリッドECU70は、前述したように、エンジンECU24やモータECU40、バッテリECU52と通信ポートを介して接続されており、エンジンECU24、モータECU40、バッテリECU52と各種制御信号やデータの授受を行っている。
【0027】
ここで、ハイブリッド制御装置は、本実施形態ではエンジンECU24と、モータECU40と、バッテリECU52と、ハイブリッドECU70とにより構成される。従って、ハイブリッド制御装置は、エンジン22の運転制御、MG1の力行制御および回生制御、MG2の力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行うことができる。ここで、ハイブリッドECU70は、本実施形態では、後述する要求駆動力設定部70aにより設定された要求駆動力Tnと、目標エンジン回転数設定部70bにより設定された目標エンジン回転数に基づいて、エンジンECU24、モータECU40、バッテリECU52に各種制御信号を出力し、エンジン22の運転制御、MG1の力行制御および回生制御、MG2の力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行わせるものである。
【0028】
また、ハイブリッドECU70は、要求駆動力設定部70a、目標エンジン回転数設定部70bと、目標変速段設定部70cと、シーケンシャルシフトモード判定部70dと、シーケンシャル変速段設定部70eと、シーケンシャル変速段変更判定部70fと、アクセル開度取得部70g、アクセル開度判定部70h、エンブレ駆動力設定部70iとを有する。
【0029】
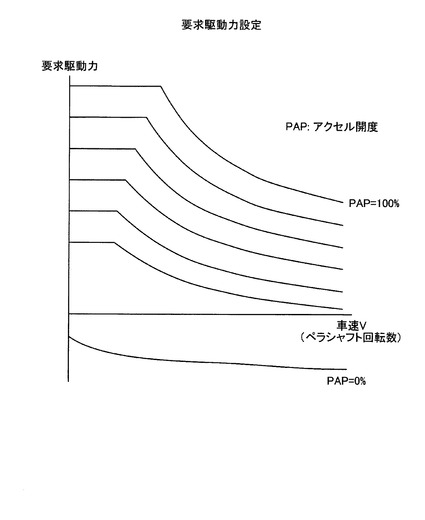
要求駆動力設定部70aは、要求駆動力設定手段であり、運転者が要求する要求駆動力Tnを設定するものである。要求駆動力設定部70aは、本実施形態では、アクセル開度取得部70gにより検出されたアクセル開度PAPと、車速センサ88により検出された車速V(ペラシャフト回転数)と、図4に示すようなアクセル開度PAP、車速V(ペラシャフト回転数)、要求駆動力Tnの関係が設定された要求駆動力Tnを設定するためのマップとに基づいて要求駆動力Tnを設定する。また、要求駆動力設定部70aは、本実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、シーケンシャル変速段設定部70eにより設定された操作変速段、すなわちシーケンシャル変速段Yに基づいて変更するものである。要求駆動力設定部70aは、本実施形態では、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1以上であると判定されると、上記要求駆動力設定部70aにより設定された要求駆動力Tnにトルク比tを乗算することで要求駆動力Tnを変更する。また、アクセル開度PAPが所定アクセル開度PAP1未満であると判定されると、設定された要求駆動力Tnはトルク比tをパラメータとする要求駆動力Tnに変更される。ここで、トルク比tは、エンブレ駆動力設定部70iにより設定されたシーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebと、現在のシーケンシャル変速段Y(設定されたシーケンシャル変速段Y)に基づいたエンブレ駆動力Teyとの比(Tey/Teb)である。つまり、要求駆動力設定部70aは、設定された要求駆動力Tnをエンブレ駆動力設定部70iにより設定されたエンブレ駆動力Teに基づいて変更するものである。
【0030】
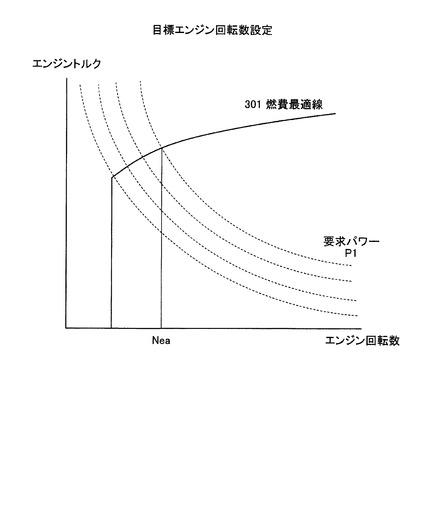
目標エンジン回転数設定部70bは、目標機関回転数設定手段であり、エンジン22の目標エンジン回転数Neoを設定するものである。目標エンジン回転数設定部70bは、本実施形態では、上記要求駆動力設定部70aにより設定された要求駆動力Tnと車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて設定された要求パワーPと、図5に示すようなエンジントルク、エンジン回転数、要求パワーの関係が設定された目標エンジン回転数Neoを設定するためのマップとに基づいて目標エンジン回転数を設定する。また、目標エンジン回転数設定部70bは、本実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、設定されたシーケンシャル変速段Yと、車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定する。
【0031】
目標変速段設定部70cは、目標変速段設定手段であり、ハイブリッド車両20の走行中の目標変速段Xを設定するものである。目標変速段設定部70cは、予め出力回転数、すなわち車速V(ペラシャフト回転数)を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中のパラメータに基づいてハイブリッド車両20の走行中の目標変速段Xを設定するものである。目標変速段設定部70cは、本実施形態では、上記要求駆動力設定部70aにより設定された要求駆動力Tnと、アクセル開度取得部70gにより取得されたアクセル開度PAPあるいは車速センサ88により検出された車速V(ペラシャフト回転数)と、図6に示すように要求駆動力Tn、アクセル開度PAP、車速V(ペラシャフト回転数)、推定変速段の関係が設定された目標変速段を設定するためのマップとに基づいて目標変速段Xを設定する。
【0032】
シーケンシャルシフトモード判定部70dは、変速段操作モード判定手段であり、運転者の操作により操作変速段、すなわちシーケンシャル変速段Yの固定変更を行う変速段操作モード、すなわちシーケンシャルシフトモードであるか否かを判定するものである。シーケンシャルシフトモード判定部70dは、本実施形態では、シフトポジションセンサ82により検出されたシフトポジションSPがシーケンシャルシフトポジションに位置しているか否かを判定するものである。ここで、シフトレバー81は、図9に示すように、例えばパーキングポジション(P)、後進ポジション(R)、ニュートラルポジション(N)、前進ポジション(D)、シーケンシャルシフトポジション(S)、シフトアップポジション(+)、シフトダウンポジション(−)のいずれかの位置に運転者の操作により移動することができる。シーケンシャルシフトモード判定部70dは、シフトレバー81がシーケンシャルシフトポジション(S)に位置すると、シーケンシャルシフトモードであると判定する。なお、シフトレバー81は、シフトアップポジション(+)およびシフトダウンポジション(−)に位置しても、その位置で固定されずシーケンシャルシフトポジション(S)に戻るように設定されている。つまり、運転者がシフトレバー81を操作し、シーケンシャルシフトポジション(S)からシフトアップポジション(+)あるいはシフトダウンポジション(−)に移動させても、シフトレバー81は運転者のシフトレバー81の操作が終了すると、シーケンシャルシフトポジション(S)に戻る。
【0033】
シーケンシャル変速段設定部70eは、操作変速段設定手段であり、変速段操作モードにおける運転者の操作による操作変速段、すなわちシーケンシャルシフトモードにおける運転者のシフトレバー81の操作によるシーケンシャル変速段Yを設定するものである。シーケンシャル変速段設定部70eは、本実施形態では、シーケンシャル変速段Yを目標変速段設定部70cにより設定された目標変速段Xを基準として設定するものである。シーケンシャル変速段設定部70eは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、まず目標変速段設定部70cにより設定された目標変速段Xをシーケンシャル変速段Yに設定する(シーケンシャル変速段Y=目標変速段X)。また、シーケンシャル変速段設定部70eは、シーケンシャル変速段変更判定部70fにより運転者の操作によりシーケンシャル変速段の変更、すなわち変速が行われたと判定されると、シーケンシャル変速段Yを現在のシーケンシャル変速段Yに1段(1速)増加あるいは1段(1速)減少して設定する(Y=Y±1)。
【0034】
シーケンシャル変速段変更判定部70fは、操作変速段変更判定手段であり、シーケンシャル変速段設定部70eにより設定された操作変速段、すなわちシーケンシャル変速段Yが変更されたか否かを判定するものである。つまり、シーケンシャル変速段変更判定部70fは、運転者の操作によりシフトレバー81がシフトアップポジション(+)、シフトダウンポジション(−)のいずれかの位置に移動したか否か、すなわち運転者の操作により変速が行われたか否かを判定するものである。シーケンシャル変速段変更判定部70fは、本実施形態では、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)に位置したとシフトポジションセンサ82が検出することで、設定されたシーケンシャル変速段Yが高速段側に変更、すなわちアップシフトされたと判定するものである。また、シーケンシャル変速段変更判定部70fは、本実施形態では、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、設定されたシーケンシャル変速段Yが低速段側に変更、すなわちダウンシフトされたと判定するものである。
【0035】
アクセル開度取得部70gは、アクセル操作量取得手段であり、アクセルペダルポジションセンサ84からの信号によりアクセル操作量であるアクセル開度PAPを取得するものである。アクセル開度取得部70gは、運転者がアクセルペダル83を踏むことにより、踏み込み量に基づく信号がアクセルペダルポジションセンサ84からハイブリッドECU70に入力され、アクセル開度PAPを取得する。
【0036】
アクセル開度判定部70hは、アクセル操作量判定手段であり、アクセル開度取得部70gにより取得されたアクセル開度PAPが、所定アクセル開度PAP1以上であるか否かを判定するものである。所定アクセル開度は、ハイブリッドECU70の記録媒体(図示せず)に予め記録されており、実施形態では10%程度である。アクセル開度判定部70hは、記録媒体に記録されている所定アクセル開度PAP1と、取得されたアクセル開度PAPとを比較し、取得されたアクセル開度PAPが、予め設定されている所定アクセル開度PAP1以上であるか否かを判定する。
【0037】
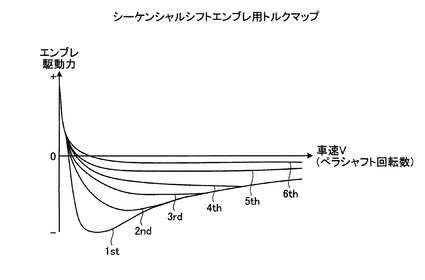
エンブレ駆動力設定部70iは、抵抗駆動力設定手段であり、設定されたシーケンシャル変速段Yおよび車速V(ペラシャフト回転数)に基づいてエンブレ駆動力Teを設定する。エンブレ駆動力設定部70iは、実施形態では、設定されたシーケンシャル変速段Yと、車速V(ペラシャフト回転数)と、図10に示すようなシーケンシャル変速段Y、車速V(ペラシャフト回転数)、エンブレ駆動力Teの関係が設定されたエンブレ駆動力Teを設定するためのマップとに基づいてシーケンシャル変速段Yごとのエンブレ駆動量Teを設定するものである。ここで、設定されるエンブレ駆動力Teは、取得されたアクセル開度PAPが0などのハイブリッド車両20の被駆動状態において、ハイブリッド車両20に作用させる要求駆動力Tnである。
【0038】
なお、ハイブリッドECU70は、トルク変換運転モード、充放電運転モード、モータ運転モードなどに基づいて、エンジンECU24にエンジン22の運転制御、モータECU40にMG1の力行制御および回生制御、モータECU40にMG2の力行制御および回生制御を行わせるものである。
【0039】
トルク変換運転モードは、要求駆動力Tnに見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが遊星歯車機構30とMG1とMG2とによってトルク変換されてリングギヤ軸32aに出力されるようMG1およびMG2を駆動制御する運転モードである。
【0040】
充放電運転モードは、要求駆動力Tnとバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が遊星歯車機構30とMG1とMG2とによるトルク変換を伴って要求動力がリングギヤ軸32aに出力されるようMG1およびMG2を駆動制御する運転モードである。
【0041】
モータ運転モードは、エンジン22の運転を停止してMG2からの要求駆動力Tnに見合う動力をリングギヤ軸32aに出力するよう駆動制御する運転モードである。
【0042】
本実施形態では、運転者によりシフトレバー81が前進ポジション(D)や後進ポジション(R)に操作されたときに、エンジン22の効率やバッテリ50の蓄電状態に基づいて上述したトルク変換運転モード、充放電運転モード、モータ運転モードのうちのいずれかのモードでエンジン22の運転制御、MG1、MG2の駆動制御を行う。
【0043】
また、運転者の操作により、シフトレバー81が前進ポジション(D)に位置しているときのエンジン22の運転停止は、駆動軸としてのリングギヤ軸32aの要求駆動力Tnとバッテリ50の充放電に必要な動力との和として車両全体に要求される動力が、エンジン22を効率よく運転できる範囲を定める所定動力未満のときに行なわれる。
【0044】
次に、本実施形態にかかるハイブリッド制御装置の動作について説明する。ここで、ハイブリッド制御装置の動作は、制御周期ごとに繰り返し実行される。
【0045】
まず、図2および図3に示すように、ハイブリッドECU70は、アクセル開度PAPと、車速V(ペラシャフト回転数)、前回シーケンシャル変速段Ylastの取得を行う(ステップS001)。
【0046】
次に、ハイブリッドECU70の要求駆動力設定部70aは、要求駆動力Tnを設定する(ステップS002)。ここでは、要求駆動力設定部70aは、上述のように、アクセル開度取得部70gにより取得されたアクセル開度PAPと、車速センサ88により検出された車速V(ペラシャフト回転数)と、図4に示すような要求駆動力Tnを設定するためのマップとに基づいて要求駆動力Tnを設定する。
【0047】
次に、ハイブリッドECU70は、要求パワーPを設定する。そして、ハイブリッドECU70の目標エンジン回転数設定部70bは、設定された要求パワーPに基づいて目標エンジン回転数Neoを設定する(ステップS003)。ここでは、ハイブリッドECU70は、上記要求駆動力設定部70aにより設定された要求駆動力Tnと、車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて要求パワーPを設定する。ここで、要求パワーP=要求駆動力Tn×ペラシャフト回転数である。また、目標エンジン回転数設定部70bは、設定された要求パワーPと、図5に示すような目標エンジン回転数Neoを設定するためのマップとに基づいて目標エンジン回転数Neoを設定する。具体体には、目標エンジン回転数設定部70bは、マップに設定されているエンジン22の燃費最適線301と要求パワーPとに基づいて目標エンジン回転数Neoを設定する。例えば、同図に示すように、設定された要求駆動力Tnから設定された要求パワーがP1である場合、目標エンジン回転数NeoはNeaに設定される。
【0048】
次に、ハイブリッドECU70の目標変速段設定部70cは、目標変速段Xを設定する(ステップS004)。ここでは、目標変速段設定部70cは、上述のように、要求駆動力設定部70aにより設定された要求駆動力Tnと、アクセル開度取得部70gにより取得されたアクセル開度PAPあるいは車速センサ88により検出された車速V(ペラシャフト回転数)と、図6に示すように目標変速段Xを設定するためのマップとに基づいて目標変速段Xを設定する。
【0049】
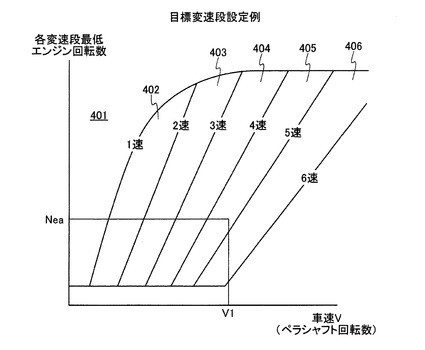
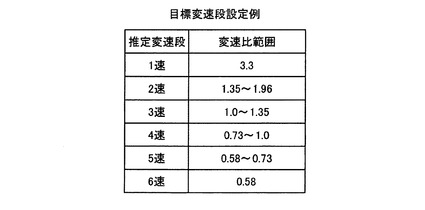
ここで、目標変速段設定部70cによる目標変速段Xの設定方法は、上記図6に示す目標変速段Xを設定するためのマップを用いる方法に限定されない。例えば、上記ステップS003において設定された目標エンジン回転数Neoと、上記ステップS001において取得された車速V(ペラシャフト回転数)とに基づいて、変速比を設定し、設定された変速比と、図8に示すような変速比と変速段との関係が設定されたマップとに基づいて目標変速段Xを設定しても良い。また、例えば、上記ステップS003において設定された目標エンジン回転数Neoと、上記ステップS001において取得された車速V(ペラシャフト回転数)と、図7に示すような各変速段最低エンジン回転数、車速V(ペラシャフト回転数)の関係が設定された目標変速段Xを設定するためのマップとに基づいて目標変速段Xを設定しても良い。なお、同図において、401は目標変速段Xが1速の領域、402は同2速の領域、403は同3速の領域、404は同4速の領域、405は同5速の領域、406は同6速の領域をそれぞれ示している。例えば、設定された目標エンジン回転数NeoがNeaであり、車速V(ペラシャフト回転数)がV1であると、目標変速段Xは5速に設定される。
【0050】
次に、ハイブリッドECU70のシーケンシャルシフトモード判定部70dは、シーケンシャルシフトモードであるか否か、すなわちシーケンシャルシフトモード実行中であるか否かを判定する(ステップS005)。ここでは、シーケンシャルシフトモード判定部70dは、運転者の操作によりシフトレバー81がシーケンシャルシフトポジション(S)に位置していることをシフトポジションセンサ82が検出したか否かを判定する。
【0051】
次に、ハイブリッドECU70は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードでないと判定される(ステップS005否定)と、前回のシーケンシャル変速段Ylastをクリアする(ステップS021)。ここでは、ハイブリッドECU70は、運転者の操作によりシフトレバー81がシーケンシャルシフトポジション(S)(シフトアップポジション(+)およびシフトダウンポジション(−)を含む)以外のポジションに位置したとシフトポジションセンサ82が検出すると、シーケンシャル変速段設定部70eにより設定されるシーケンシャル変速段Yをクリアする。従って、ハイブリッドECU70は、制御周期において、前回のシーケンシャル変速段Ylastを取得することができない。
【0052】
次に、ハイブリッドECU70は、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する(ステップS022)。ここでは、ハイブリッドECU70は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモード実行中でないと判定される(ステップS005否定)と、上記ステップS001において要求駆動力設定部70aにより設定された要求駆動力Tnと、上記ステップS003において目標エンジン回転数設定部70bにより設定された要求駆動力Tnに基づいて設定された目標エンジン回転数Neoとに基づいて、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する。なお、ハイブリッドECU70は、設定された目標エンジン回転数Neoおよび目標エンジントルクをエンジンECU24に出力し、設定された目標MG1回転数、目標MG1トルク、目標MG2トルクをモータECU40に出力する。そして、エンジンECU24は、設定された目標エンジン回転数Neoおよび目標エンジントルクに基づいてエンジン22の運転制御を行う。また、モータECU40は、設定された目標MG1回転数、目標MG1トルクに基づいてMG1を駆動制御し、設定された目標MG2トルクに基づいてMG2を駆動制御する。
【0053】
また、ハイブリッドECU70のシーケンシャル変速段設定部70eは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモード実行中であると判定される(ステップS005肯定)と、取得された前回のシーケンシャル変速段Ylastがあるか否かを判定する(ステップS006)。ここでは、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがあるか否かを判定することで、シーケンシャルシフトモードの開始時であるか、あるいはシーケンシャルシフトモードが継続中であるかのいずれかを判定する。
【0054】
次に、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがあると判定する(ステップS006肯定)と、取得された前回のシーケンシャル変速段Ylastをシーケンシャル変速段Yに設定する(ステップS007)。ここでは、シーケンシャル変速段設定部70eは、シーケンシャルシフトモードが継続中であると判定すると、前回の制御周期でシーケンシャル変速段設定部70eにより設定された前回のシーケンシャル変速段Ylastを現在のシーケンシャル変速段Yに設定する。
【0055】
また、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがないと判定する(ステップS006否定)と、目標変速段設定部70cにより設定された目標変速段Xをシーケンシャル変速段Yに設定する(ステップS008)。ここでは、シーケンシャル変速段設定部70eは、シーケンシャルシフトモードが開始された直後であると判定すると、設定された要求駆動力Tnに基づいて設定された目標エンジン回転数Neoに基づいて設定された目標変速段Xをシーケンシャルシフトモード開始時のシーケンシャル変速段Yに設定する。
【0056】
次に、ハイブリッドECU70のシーケンシャル変速段変更判定部70fは、変速が行われたか否かを判定する(ステップS009)。ここでは、シーケンシャル変速段変更判定部70fは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)、あるいはシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、運転者の操作によりアップシフトあるいはダウンシフトのいずれかが行われたか否かを判定する。
【0057】
次に、シーケンシャル変速段設定部70eは、シーケンシャル変速段変更判定部70fにより変速が行われたと判定される(ステップS009肯定)と、変速に基づいてシーケンシャル変速段Yを設定する(ステップS010)。ここでは、シーケンシャル変速段設定部70eは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)に位置したとシフトポジションセンサ82が検出することで、シーケンシャル変速段変更判定部70fにより運転者の操作によりアップシフトが行われたと判定されると、シーケンシャル変速段Yを現在設定されているシーケンシャル変速段Yに1段(1速)増加して設定する(Y=Y+1)。また、シーケンシャル変速段設定部70eは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、シーケンシャル変速段変更判定部70fにより運転者の操作によりダウンシフトが行われたと判定されると、シーケンシャル変速段Yを現在設定されているシーケンシャル変速段Yに1段(1速)減少して設定する(Y=Y−1)。
【0058】
次に、目標エンジン回転数設定部70bは、設定されたシーケンシャル変速段Yと、取得された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定する(ステップS011)。ここでは、目標エンジン回転数設定部70bは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Y(変速が行われていない場合は前回のシーケンシャル変速段Y(=Ylast)、変速が行われている場合は変速後のシーケンシャル変速段Y(=Y±1))と、車速センサ88により取得された車速Vとに基づいて設定される。例えば、目標エンジン回転数設定部70bは、上記推定変速段ごとに変速比を予め設定しておき、シーケンシャル変速段Yと一致する推定変速段に対応する変速比と、取得された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定しても良い。
【0059】
次に、エンブレ駆動力設定部70iは、現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを設定する(ステップS012)。ここでは、エンブレ駆動力設定部70iは、上述のように、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Yと、取得された車速V(ペラシャフト回転数)と、図10に示すようなエンブレ駆動力Teを設定するためのマップとに基づいて現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを設定する。
【0060】
次に、ハイブリッドECU70は、トルク比tを設定する(ステップS013)。ハイブリッドECU70は、シーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebと、上記エンブレ駆動力設定部70iにより設定された現在のシーケンシャル変速段Y(設定されたシーケンシャル変速段Y)に基づいたエンブレ駆動力Teyとの比であるトルク比t(=Tey/Teb)を設定する。ここで、エンブレ駆動力Tebは、エンブレ駆動力設定部70iによりシーケンシャル変速段Yのうち最低段である1速段(Y=1)と、取得された車速V(ペラシャフト回転数)と、図10に示すようなエンブレ駆動力Teを設定するためのマップとに基づいてエンブレ駆動力設定部70iにより設定される。
【0061】
次に、要求駆動力設定部70aは、設定されたトルク比tが0未満であるか否かを判定する(ステップS014)。
【0062】
次に、要求駆動力設定部70aは、設定されたトルク比tが0未満であると判定する(ステップS014肯定)と、トルク比tを0とする(ステップS015)。ここでは、要求駆動力設定部70aは、設定されたトルク比tが負の値であると判定すると、要求駆動力Tnを0に設定できるように、トルク比tを0に設定する。エンブレ駆動力設定部70iにより設定されるシーケンシャル変速段Yごとのエンブレ駆動力Teは、図10に示すようなエンブレ駆動力Teを設定するためのマップにおいて車速Vが極低車速(ペラシャフト回転数が数百rpm以下)の場合を除き、ハイブリッド車両20の通常走行時では負の値に設定されるので、トルク比tが正の値となる。しかしながら、同図に示すように、車速Vが極低車速(ペラシャフト回転数が数百rpm以下)の場合は、例えばシーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebが負の値に設定され、現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyが正の値に設定されることがあり、トルク比tが負の値となることがある。つまり、ハイブリッド車両20が極低車速近傍で走行している場合は、トルク比が正の値と負の値とで切り替わることとなり、トルク比に基づいて設定される要求駆動力Tnが正の値と負の値とで切り替わる虞がある。従って、要求駆動力設定部70aは、トルク比tに基づいて設定される要求駆動力Tnが負の値となる場合は、トルク比tを0として要求駆動力Tnを0に設定することで、要求駆動力Tnの急変を抑制することができ、運転者に与える違和感を抑制することができる。
【0063】
また、要求駆動力設定部70aは、設定されたトルク比tが0以上であると判定する(ステップS014否定)と、1を超えるか否かを判定する(ステップS016)。
【0064】
次に、要求駆動力設定部70aは、設定されたトルク比tが1を超えると判定する(ステップS016肯定)と、トルク比tを1とする(ステップS017)。ここでは、要求駆動力設定部70aは、設定されたトルク比tが1を超えると判定すると、要求駆動力Tnをトルク比tに基づいて設定してもトルク比tに基づいて設定する前、すなわちアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnと同じ値に設定できるように、トルク比tを1に設定する。図10に示すようなエンブレ駆動力Teを設定するためのマップでは、同じ車速V(ペラシャフト回転数)である場合に、シーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebが1速段を除いた他のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyよりも負の値側となるように設定されている。従って、通常、設定されるトルク比tが1を超えることはないので、トルク比tが1を超える場合は、異常であると判断し、1を超えるトルク比tをトルク比tの最大値である1に変更する。従って、要求駆動力設定部70aは、トルク比tに基づいて設定される要求駆動力Tnがアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnを超える場合は、トルク比tを1として、トルク比tに基づいて設定される要求駆動力Tnをアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnと同じ値とすることで、運転者が減速感を体感できない状況が発生することを抑制し、運転者に与える違和感を抑制することができる。
【0065】
次に、アクセル開度判定部70hは、アクセル開度PAPが所定アクセル開度PAP1以上であるか否かを判定する(ステップS018)。ここでは、アクセル開度判定部70hは、アクセル開度取得部70gにより取得されたアクセル開度PAPが予め設定されている所定アクセル開度PAP1以上であるか否かを判定することで、ハイブリッド車両20が駆動状態であるか否か判定する。
【0066】
次に、要求駆動力設定部70aは、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1以上であると判定される(ステップS013肯定)と、設定されたトルク比tに基づいて設定された要求駆動力Tnを変更する(ステップS019)。ここでは、要求駆動力設定部70aは、実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されるとともに、アクセル開度PAPが所定アクセル開度PAP1以上であると判定されると、アクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnに、設定したトルク比tを乗算したものを要求駆動力Tnに設定することで、アクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnを変更する。ここで、上述のように、トルク比tが0以上かつ1以下の値に設定されるため、トルク比tに基づいて設定される要求駆動力Tnは、0以上アクセル開度PAPと車速Vから設定された要求駆動力Tn以下となる。つまり、設定される要求駆動力Tnは、シーケンシャルシフトモード時であるか否かで変化する。さらに、その変化は、シーケンシャル変速段Yによっても変化することとなる。
【0067】
また、要求駆動力設定部70aは、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1未満であると判定される(ステップS018否定)と、要求駆動力Tnをエンブレ駆動力Teおよびトルク比tに基づいて設定する(ステップS020)。ここでは、要求駆動力設定部70aは、エンブレ駆動力設定部70iにより設定された現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyに補正値αを加えた値を要求駆動力Tnに設定する。ここで、αは、現在のシーケンシャル変速段Yに基づいた値であり、例えば、所定アクセル開度PAP1および車速V(ペラシャフト回転数)に基づいて設定される所定アクセル開度時要求駆動力Te1にトルク比tを乗算し、さらにそこから現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを減算し、そしてアクセル開度PAPと所定アクセル開度PAP1との比(PAP/PAP1)を乗算した値とする((Te1×t−Tey)×(PAP/PAP1))。従って、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1未満であると判定される場合に設定される要求駆動力Tnは、アクセル開度PAPが0の時がエンブレ駆動力Teとなり、アクセル開度PAPが所定アクセル開度PAP1に向かって増加するに伴いエンブレ駆動力Teから所定アクセル開度時要求駆動力Te1にトルク比tを乗算した値に増加する。
【0068】
次に、ハイブリッドECU70は、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する(ステップS022)。ここでは、ハイブリッドECU70は、目標エンジン回転数設定部70bにより設定された目標エンジン回転数Neoおよび要求駆動力設定部70aにより設定された要求駆動力Tnに基づき、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する。エンジン22の目標エンジン回転数、目標エンジントルクの値についてはエンジンECU24に、目標MG1回転数、目標MG1トルク、目標MG2トルクの値についてはモータECU40にそれぞれ送信される。
【0069】
上述のように、本実施形態にかかるハイブリッド車両20においては、シーケンシャルシフトモード時でない場合、アクセル開度PAPと車速V(ペラシャフト回転数)に基づいて要求駆動力Tnが設定され、要求駆動力Tnに基づいて目標エンジン回転数Neoが設定され、設定された要求駆動力Tnおよび目標エンジン回転数Neoに基づいてエンジン22の運転制御、MG1およびMG2の駆動制御が行われる。一方、シーケンシャルシフトモード時である場合、運転者がシフトレバー81を操作することにより設定されたシーケンシャル変速段Yと車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoが設定され、また設定されたトルク比tに基づいて要求駆動力Tnが設定され、設定された目標エンジン回転数Neoおよび要求駆動力Tnに基づいてエンジン22の運転制御、MG1およびMG2の駆動制御が行われる。
【0070】
以上のように、実施形態にかかるハイブリッド車両20では、要求駆動力設定部70aにより設定された要求駆動力Teを操作変速段であるシーケンシャル変速段Yに基づいて変更する。ここでは、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Yにおけるエンブレ駆動力Teyと、シーケンシャル変速段Yのうち最低段である1速段におけるエンブレ駆動力Tebとの抵抗駆動力比であるトルク比tに基づいて要求駆動力Tnを変更するので、要求駆動力Tnが各シーケンシャル変速段Yに対応して変化する。従って、シーケンシャル変速段変更判定部70fにより運転者の操作により変速が行われたと判定され、運転者の操作によりシーケンシャル変速段Yが変更された際には、要求駆動力Tnが変速後のシーケンシャル変速段Yに対応して変更されるので、変速時にハイブリッド車両20の駆動力が変化し、運転者に自然な変速感を体感させることができる。
【0071】
上記実施形態では、シーケンシャル変速段Yごとに異なるエンブレ駆動力に基づいてトルク比tを設定し、設定されたトルク比tに基づいて要求駆動力Teを算出したが、本発明はこれに限定されるものではなく、シーケンシャル変速段Yの変速時に駆動力段差が生じるシーケンシャル変速段Yごとに異なるパラメータであればそれを用いても良い。
【産業上の利用可能性】
【0072】
以上のように、本発明にかかるハイブリッド車両は、内燃機関と、第一の電動発電機と、内燃機関と第一の電動発電機からの動力を合成または分配する動力合成分配機構と、動力合成分配機構と駆動輪の間に設けられた第二の電動発電機とを備えるハイブリッド車両に有用であり、特に、運転者の操作により変速が行われた際に、運転者に変速感を体感させるのに適している。
【図面の簡単な説明】
【0073】
【図1】実施形態にかかるハイブリッド車両の概略構成を示すブロック図である。
【図2】実施形態にかかるハイブリッド車両の基本動作フローを示す図である。
【図3】実施形態にかかるハイブリッド車両の基本動作フローを示す図である。
【図4】実施形態にかかるハイブリッド車両の要求駆動力を設定するためのマップを示す図である。
【図5】実施形態にかかるハイブリッド車両の目標エンジン回転数を設定するためのマップを示す図である。
【図6】実施形態にかかるハイブリッド車両の目標変速段を設定するためのマップを示す図である。
【図7】実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。
【図8】実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。
【図9】実施形態にかかるハイブリッド車両のシフトレバーとシフトポジションを示す図である。
【図10】実施形態にかかるハイブリッド車両のエンブレ駆動力を設定するためのマップを示す図である。
【符号の説明】
【0074】
20 ハイブリッド車両
22 エンジン(内燃機関)
24 エンジンECU(ハイブリッド制御装置)
26 クランクシャフト
28 ダンパ
30 遊星歯車機構
31 サンギヤ
32 リングギヤ
32a リングギヤ軸(駆動軸)
33 ピニオンギヤ
34 キャリア
35 減速ギヤ
40 モータECU(ハイブリッド制御装置)
41 インバータ
42 インバータ
43 回転位置検出センサ
44 回転位置検出センサ
50 バッテリ(蓄電装置)
51 温度センサ
52 バッテリECU(ハイブリッド制御装置)
54 電力ライン
60 ギヤ機構
62 デファレンシャルギヤ
63a 駆動輪
63b 駆動輪
70 ハイブリッドECU(ハイブリッド制御装置)
70a 要求駆動力設定部(要求駆動力設定手段)
70b 目標エンジン回転数設定部(目標機関回転数設定手段)
70c 目標変速段設定部(目標変速段設定手段)
70d シーケンシャルシフトモード判定部(変速段操作モード判定手段)
70e シーケンシャル変速段設定部(操作変速段設定手段)
70f シーケンシャル変速段変更判定部(操作変速段変更判定手段)
70g アクセル開度取得部(アクセル操作量取得手段)
70h アクセル開度判定部(アクセル操作量判定手段)
70i エンブレ駆動力設定部(抵抗駆動力設定手段)
80 イグニッションスイッチ
81 シフトレバー
82 シフトポジションセンサ
83 アクセルペダル
84 アクセルペダルポジションセンサ
85 ブレーキペダル
86 ブレーキペダルポジションセンサ
88 車速センサ
401 1速の領域
402 2速の領域
403 3速の領域
404 4速の領域
405 5速の領域
406 6速の領域
PAP アクセル開度
MG1 第一の電動発電機
MG2 第二の電動発電機
SP シフトポジション
V 車速(ペラシャフト回転数)
【技術分野】
【0001】
本発明は、ハイブリッド車両に関し、特に、内燃機関と、第一の電動発電機と、内燃機関と第一の電動発電機からの動力を合成または分配する動力合成分配機構と、動力合成分配機構と駆動輪の間に設けられた第二の電動発電機とを備えるハイブリッド車両に関するものである。
【背景技術】
【0002】
ハイブリッド車両には、たとえば特許文献1に示すように、動力合成分配機構である遊星歯車機構のキャリア、サンギヤ、リングギヤに内燃機関であるエンジン、第一の電動発電機であるMG1、駆動軸をそれぞれ接続し、駆動軸に第二の電動発電機であるMG2を接続したものがある。従来のハイブリッド車両は、エンジンとMG1との動力を遊星歯車機構により合成・分配し、また遊星歯車機構によりMG1を回転させることでエンジンを回転させることができるものである。さらに、非駆動時にはMG2において回生制御を行い、回生した電力はMG2に連結された蓄電装置であるバッテリに蓄電される。
【0003】
また、ハイブリッド車両は、ハイブリッド車両を制御するためのハイブリッド制御装置を備えている。ハイブリッド制御装置は、動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行う。ここで、ハイブリッド制御装置は、基本的に運転者が要求する要求駆動力を設定し、設定された要求駆動力に基づいてエンジンの目標エンジン回転数を設定し、設定された要求駆動力および設定された目標エンジン回転数に基づいて動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行う。また、ハイブリッド制御装置は、予め出力回転数である車速V(ペラシャフト回転数)を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中のパラメータに基づいて走行中の目標変速段を設定する。
【0004】
ここで、ハイブリッド車両には、運転者の操作により設定された目標変速段の固定変更を行うことができるシーケンシャルシフトを備えるものがある。シーケンシャルシフトを備えるハイブリッド車両の場合では、運転者が操作するシフトレバーがシーケンシャルシフトモードとなる位置に変更されると、ハイブリッド制御装置がシーケンシャルシフトモードであると判定し、設定された目標変速段を基準として、シーケンシャルシフトモードにおける運転者の操作による操作変速段を設定する。ここで、ハイブリッド制御装置は、シーケンシャルシフトモード時では設定された操作変速段に基づいて目標エンジン回転数を設定し、設定された目標エンジン回転数に基づいて動力源(エンジン、MG1、MG2)のそれぞれに対して運転制御、力行制御および回生制御を行うこととなる。従って、運転者がシフトレバーを操作することにより、操作変速段が変更、すなわち変速が行われると、目標エンジン回転数は、変速後の操作変速段に基づいて設定されたエンジンのエンジン回転数が目標エンジン回転数まで変化する。
【0005】
【特許文献1】特開2006−256595号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記特許文献1では、操作変速段が変更されると、変更後の操作変速段に基づいて設定された目標エンジン回転数となるように、エンジンのエンジン回転数が制御されることで、運転者の操作による変速時、運転者に変速感を伝える。そのため、有段の自動変速機を搭載する車両の変速感をハイブリッド車両の運転者に疑似体験させることで違和感を与えるのを抑制するものである。
【0007】
ところで、上記特許文献1では、まず出力回転数を含む複数のパラメータにより目標駆動力を設定し、変速後の変速段に基づいてエンジンの目標エンジン回転数を設定している。つまり、運転者の操作によるシフトチェンジ時にエンジン回転数を変化させているものである。そして要求駆動力は、設定された目標エンジン回転数に基づいて設定している。このため、変速における駆動力変化が乏しく、変速に違和感が生じる恐れがある。
【0008】
本発明の目的は、運転者の操作により変速が行われた際に、運転者が自然な変速感を体感することができるハイブリッド車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、本発明は、内燃機関と、第一の電動発電機と、前記内燃機関および前記第一の電動発電機からの動力を合成または分配する動力合成分配機構と、前記動力合成分配機構と駆動輪の間に設けられた第二の電動発電機と、前記第一の電動発電機および前記第二の電動発電機との間で電力の授受を行う蓄電装置と、前記内燃機関の運転制御、前記第一の電動発電機および前記第二の電動発電機のそれぞれに対して力行制御および回生制御、前記蓄電装置の蓄電制御および放電制御を行うハイブリッド制御装置と、を備えたハイブリッド車両において、前記ハイブリッド制御装置は、運転者が要求する要求駆動力を設定する要求駆動力設定手段と、前記設定された要求駆動力に基づいて前記内燃機関の目標機関回転数を設定する目標機関回転数設定手段と、予め出力回転数を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中の前記パラメータに基づいて前記走行中の目標変速段を設定する目標変速段設定手段と、運転者の操作により操作変速段の固定変更を行う変速段操作モードであるか否かを判定する変速段操作モード判定手段と、前記設定された目標変速段を基準として、変速段操作モードにおける前記運転者の操作による操作変速段を設定する操作変速段設定手段と、前記設定された操作変速段が変更されたか否かを判定する操作変速段変更判定手段と、を有するとともに、前記変速段操作モード判定手段により前記変速段操作モードであると判定されると、前記目標機関回転数設定手段が前記設定された操作変速段に基づいて前記目標機関回転数を設定し、前記要求駆動力設定手段が前記設定された要求駆動力を前記操作変速段に基づいて変更することを特徴とする。
【0010】
また、上記ハイブリッド車両において、前記ハイブリッド制御装置は、前記設定された操作変速段および前記出力回転数に基づいた抵抗駆動力を設定する抵抗駆動力設定手段をさらに有し、前記要求駆動力設定手段は、前記設定された要求駆動力を前記設定された抵抗駆動力に基づいて変更することが好ましい。
【0011】
また、上記ハイブリッド車両において、前記要求駆動力設定手段は、前記設定された操作変速段における抵抗駆動力と、前記操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて前記設定された要求駆動力を変更することが好ましい。
【0012】
また、上記ハイブリッド車両において、前記要求駆動力設定手段は、前記抵抗駆動力比を0未満の場合は0とし、1を超える場合は1とすることが好ましい。
【発明の効果】
【0013】
本発明によれば、設定された要求駆動力を操作変速段に基づいて、例えば設定された操作変速段における抵抗駆動力と、操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて要求駆動力を変更するので、要求駆動力が各操作変速段に対応して変化する。従って、設定された操作変速段が変速された際には、要求駆動力が変速後の操作変速段に対応して変更されるので、変速時に駆動力が変化し、運転者に自然な変速感を体感させることができるという効果を奏する。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態につき図面を参照しつつ詳細に説明する。なお、下記の実施形態により、本発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0015】
図1から図10を参照して、本実施形態にかかるハイブリッド車両について説明する。図1は、実施形態にかかるハイブリッド車両の概略構成を示すブロック図である。図2および図3は、実施形態にかかるハイブリッド車両の基本動作フローを示す図である。図4は、実施形態にかかるハイブリッド車両の要求駆動力を設定するためのマップを示す図である。図5は、実施形態にかかるハイブリッド車両の目標エンジン回転数を設定するためのマップを示す図である。図6は、実施形態にかかるハイブリッド車両の目標変速段を設定するためのマップを示す図である。図7は、実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。図8は、実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。図9は、実施形態にかかるハイブリッド車両のシフトレバーとシフトポジションを示す図である。図10は、実施形態にかかるハイブリッド車両のエンブレ駆動力を設定するためのマップを示す図である。
【0016】
本実施形態は、アクセル開度PAPと出力回転数である車速V(ペラシャフト回転数)から決まる要求ペラシャフトトルクである要求駆動力Tnを設定し、それに基づき目標エンジン回転数Neoを設定し、またマップを参照して目標変速段Xを設定する。ここで、シーケンシャルシフトを搭載している場合、ハイブリッド制御装置が以下の動作を行うものである。
【0017】
シーケンシャルシフトモード時では、運転者の操作により固定あるいは変速された操作変速段Yに基づいて目標エンジン回転数Neoを設定し、設定された要求駆動力Tnを抵抗駆動力の抵抗駆動力比、すなわちエンブレ駆動力Teのトルク比tに基づいて変更する。そして、設定された操作変速段Y(操作変速比)および設定された要求駆動力Tnに基づき動力源を制御する。
【0018】
ここで、トルク比tは、操作変速段のうち最低段である1速段でのエンブレ駆動力Tebと現在の操作変速段YでのエンブレトルクTeyとの比(Tey/Teb)である。なお、トルク比tが0未満の場合は0とし、1を超える場合は1とする。
【0019】
本実施形態に係るハイブリッド車両20は、図1に示すように、内燃機関であるエンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して接続された3軸式の動力合成分配機構である遊星歯車機構30と、遊星歯車機構30に接続された発電可能な第一の電動発電機であるMG1と、遊星歯車機構30に接続された駆動軸としてのリングギヤ軸32aに取り付けられた減速ギヤ35と、この減速ギヤ35に接続された、すなわち遊星歯車機構30と駆動輪63a、63bの間に設けられた第二の電動発電機であるMG2と、ハイブリッド車両全体をコントロールするハイブリッド制御装置の一部であるハイブリッド用電子制御ユニット(以下、ハイブリッドECUという)70とを備える。
【0020】
エンジン22は、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関であり、エンジン22の運転状態を検出する各種センサから信号を入力するエンジン用電子制御ユニット(以下、エンジンECUという)24により燃料噴射制御や点火制御、吸入空気量調節制御などの運転制御を受けている。また、エンジン22には、回転数検出手段であるエンジン回転数検出センサ(図示せず)が備えられている。検出されたエンジン回転数は、エンジンECU24に出力される。つまり、エンジンECU24は、内燃機関の機関回転数であるエンジン22のエンジン回転数を取得する回転数取得手段として機能する。また、エンジンECU24は、ハイブリッド制御装置の一部を構成するものであり、またハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータ、特に取得したエンジン回転数をハイブリッドECU70に出力する。
【0021】
遊星歯車機構30は、動力合成分配機構であり、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行なう遊星歯車機構として構成されている。
【0022】
遊星歯車機構30は、キャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはMG1が、リングギヤ32にはリングギヤ軸32aを介して減速ギヤ35がそれぞれ連結されており、MG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配し、MG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるMG1からの動力を合成してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構60およびデファレンシャルギヤ62を介して、最終的には車両の駆動輪63a、63bに出力される。つまり、遊星歯車機構30は、エンジン22およびMG1からの動力を合成または分配するものである。
【0023】
MG1は、第一の電動発電機であり、MG2は第二の電動発電機である。MG1およびMG2は、いずれも発電機として駆動することができると共に電動機として駆動できる周知の同期発電電動機として構成されており、インバータ41、42を介してバッテリ50と電力の授受を行う。インバータ41、42とバッテリ50とを接続する電力ライン54は、各インバータ41、42が共用する正極母線および負極母線として構成されており、MG1、MG2のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ50は、MG1、MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、MG1、MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。
【0024】
MG1およびMG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40は、ハイブリッド制御装置の一部を構成するものであり、MG1、MG2を発電機として駆動制御する回生制御、および電動機として駆動制御する力行制御を行う。モータECU40には、MG1、MG2を駆動制御するために必要な信号、例えばMG1、MG2の回転子の回転位置を検出する回転位置検出センサ43、44からの信号や図示しない電流センサにより検出されるMG1、MG2に印加される相電流などが入力されており、モータECU40からは、インバータ41、42へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッドECU70と通信しており、ハイブリッドECU70からの制御信号によってMG1、MG2を駆動制御すると共に必要に応じてMG1、MG2の駆動状態に関するデータをハイブリッドECU70に出力する。
【0025】
バッテリ50は、MG1およびMG2との間で電力の授受を行うものであり、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって制御されている。バッテリECU52は、ハイブリッド制御装置の一部を構成するものである。バッテリECU52は、バッテリ50に電力を蓄電する蓄電制御とバッテリ50が電力を放電する放電制御を行う。バッテリECU52は、バッテリ50を制御するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧、バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流、バッテリ50に取り付けられた温度センサ51からの電池温度Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッドECU70に出力する。なお、バッテリECU52は、バッテリ50の蓄電量、本実施形態ではバッテリ残量(SOC)を推定する蓄電量推定部を備え、バッテリ50を制御するために電流センサにより検出された充放電電流の積算値に基づいてバッテリ残量(SOC)を演算し、推定している。つまり、バッテリECU52は、蓄電装置の蓄電量であるバッテリ50のバッテリ残量(SOC)を取得する蓄電量取得手段として機能する。
【0026】
ハイブリッドECU70は、ハイブリッド制御装置の一部を構成するものである。ハイブリッドECU70は、CPU(図示せず)を中心とするマイクロプロセッサとして構成されており、CPUの他に処理プログラムを記憶するROM(図示せず)と、データを一時的に記憶するRAM(図示せず)と、入出力ポートおよび通信ポート(図示せず)とを備える。ハイブリッドECU70には、イグニッションスイッチ80からのイグニッション信号、シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP、アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度PAP、ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP、車速センサ88からの車速V(ペラシャフト回転数)などが入力ポートを介して入力されている。ハイブリッドECU70は、前述したように、エンジンECU24やモータECU40、バッテリECU52と通信ポートを介して接続されており、エンジンECU24、モータECU40、バッテリECU52と各種制御信号やデータの授受を行っている。
【0027】
ここで、ハイブリッド制御装置は、本実施形態ではエンジンECU24と、モータECU40と、バッテリECU52と、ハイブリッドECU70とにより構成される。従って、ハイブリッド制御装置は、エンジン22の運転制御、MG1の力行制御および回生制御、MG2の力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行うことができる。ここで、ハイブリッドECU70は、本実施形態では、後述する要求駆動力設定部70aにより設定された要求駆動力Tnと、目標エンジン回転数設定部70bにより設定された目標エンジン回転数に基づいて、エンジンECU24、モータECU40、バッテリECU52に各種制御信号を出力し、エンジン22の運転制御、MG1の力行制御および回生制御、MG2の力行制御および回生制御、バッテリ50の蓄電制御および放電制御を行わせるものである。
【0028】
また、ハイブリッドECU70は、要求駆動力設定部70a、目標エンジン回転数設定部70bと、目標変速段設定部70cと、シーケンシャルシフトモード判定部70dと、シーケンシャル変速段設定部70eと、シーケンシャル変速段変更判定部70fと、アクセル開度取得部70g、アクセル開度判定部70h、エンブレ駆動力設定部70iとを有する。
【0029】
要求駆動力設定部70aは、要求駆動力設定手段であり、運転者が要求する要求駆動力Tnを設定するものである。要求駆動力設定部70aは、本実施形態では、アクセル開度取得部70gにより検出されたアクセル開度PAPと、車速センサ88により検出された車速V(ペラシャフト回転数)と、図4に示すようなアクセル開度PAP、車速V(ペラシャフト回転数)、要求駆動力Tnの関係が設定された要求駆動力Tnを設定するためのマップとに基づいて要求駆動力Tnを設定する。また、要求駆動力設定部70aは、本実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、シーケンシャル変速段設定部70eにより設定された操作変速段、すなわちシーケンシャル変速段Yに基づいて変更するものである。要求駆動力設定部70aは、本実施形態では、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1以上であると判定されると、上記要求駆動力設定部70aにより設定された要求駆動力Tnにトルク比tを乗算することで要求駆動力Tnを変更する。また、アクセル開度PAPが所定アクセル開度PAP1未満であると判定されると、設定された要求駆動力Tnはトルク比tをパラメータとする要求駆動力Tnに変更される。ここで、トルク比tは、エンブレ駆動力設定部70iにより設定されたシーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebと、現在のシーケンシャル変速段Y(設定されたシーケンシャル変速段Y)に基づいたエンブレ駆動力Teyとの比(Tey/Teb)である。つまり、要求駆動力設定部70aは、設定された要求駆動力Tnをエンブレ駆動力設定部70iにより設定されたエンブレ駆動力Teに基づいて変更するものである。
【0030】
目標エンジン回転数設定部70bは、目標機関回転数設定手段であり、エンジン22の目標エンジン回転数Neoを設定するものである。目標エンジン回転数設定部70bは、本実施形態では、上記要求駆動力設定部70aにより設定された要求駆動力Tnと車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて設定された要求パワーPと、図5に示すようなエンジントルク、エンジン回転数、要求パワーの関係が設定された目標エンジン回転数Neoを設定するためのマップとに基づいて目標エンジン回転数を設定する。また、目標エンジン回転数設定部70bは、本実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、設定されたシーケンシャル変速段Yと、車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定する。
【0031】
目標変速段設定部70cは、目標変速段設定手段であり、ハイブリッド車両20の走行中の目標変速段Xを設定するものである。目標変速段設定部70cは、予め出力回転数、すなわち車速V(ペラシャフト回転数)を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中のパラメータに基づいてハイブリッド車両20の走行中の目標変速段Xを設定するものである。目標変速段設定部70cは、本実施形態では、上記要求駆動力設定部70aにより設定された要求駆動力Tnと、アクセル開度取得部70gにより取得されたアクセル開度PAPあるいは車速センサ88により検出された車速V(ペラシャフト回転数)と、図6に示すように要求駆動力Tn、アクセル開度PAP、車速V(ペラシャフト回転数)、推定変速段の関係が設定された目標変速段を設定するためのマップとに基づいて目標変速段Xを設定する。
【0032】
シーケンシャルシフトモード判定部70dは、変速段操作モード判定手段であり、運転者の操作により操作変速段、すなわちシーケンシャル変速段Yの固定変更を行う変速段操作モード、すなわちシーケンシャルシフトモードであるか否かを判定するものである。シーケンシャルシフトモード判定部70dは、本実施形態では、シフトポジションセンサ82により検出されたシフトポジションSPがシーケンシャルシフトポジションに位置しているか否かを判定するものである。ここで、シフトレバー81は、図9に示すように、例えばパーキングポジション(P)、後進ポジション(R)、ニュートラルポジション(N)、前進ポジション(D)、シーケンシャルシフトポジション(S)、シフトアップポジション(+)、シフトダウンポジション(−)のいずれかの位置に運転者の操作により移動することができる。シーケンシャルシフトモード判定部70dは、シフトレバー81がシーケンシャルシフトポジション(S)に位置すると、シーケンシャルシフトモードであると判定する。なお、シフトレバー81は、シフトアップポジション(+)およびシフトダウンポジション(−)に位置しても、その位置で固定されずシーケンシャルシフトポジション(S)に戻るように設定されている。つまり、運転者がシフトレバー81を操作し、シーケンシャルシフトポジション(S)からシフトアップポジション(+)あるいはシフトダウンポジション(−)に移動させても、シフトレバー81は運転者のシフトレバー81の操作が終了すると、シーケンシャルシフトポジション(S)に戻る。
【0033】
シーケンシャル変速段設定部70eは、操作変速段設定手段であり、変速段操作モードにおける運転者の操作による操作変速段、すなわちシーケンシャルシフトモードにおける運転者のシフトレバー81の操作によるシーケンシャル変速段Yを設定するものである。シーケンシャル変速段設定部70eは、本実施形態では、シーケンシャル変速段Yを目標変速段設定部70cにより設定された目標変速段Xを基準として設定するものである。シーケンシャル変速段設定部70eは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、まず目標変速段設定部70cにより設定された目標変速段Xをシーケンシャル変速段Yに設定する(シーケンシャル変速段Y=目標変速段X)。また、シーケンシャル変速段設定部70eは、シーケンシャル変速段変更判定部70fにより運転者の操作によりシーケンシャル変速段の変更、すなわち変速が行われたと判定されると、シーケンシャル変速段Yを現在のシーケンシャル変速段Yに1段(1速)増加あるいは1段(1速)減少して設定する(Y=Y±1)。
【0034】
シーケンシャル変速段変更判定部70fは、操作変速段変更判定手段であり、シーケンシャル変速段設定部70eにより設定された操作変速段、すなわちシーケンシャル変速段Yが変更されたか否かを判定するものである。つまり、シーケンシャル変速段変更判定部70fは、運転者の操作によりシフトレバー81がシフトアップポジション(+)、シフトダウンポジション(−)のいずれかの位置に移動したか否か、すなわち運転者の操作により変速が行われたか否かを判定するものである。シーケンシャル変速段変更判定部70fは、本実施形態では、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)に位置したとシフトポジションセンサ82が検出することで、設定されたシーケンシャル変速段Yが高速段側に変更、すなわちアップシフトされたと判定するものである。また、シーケンシャル変速段変更判定部70fは、本実施形態では、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、設定されたシーケンシャル変速段Yが低速段側に変更、すなわちダウンシフトされたと判定するものである。
【0035】
アクセル開度取得部70gは、アクセル操作量取得手段であり、アクセルペダルポジションセンサ84からの信号によりアクセル操作量であるアクセル開度PAPを取得するものである。アクセル開度取得部70gは、運転者がアクセルペダル83を踏むことにより、踏み込み量に基づく信号がアクセルペダルポジションセンサ84からハイブリッドECU70に入力され、アクセル開度PAPを取得する。
【0036】
アクセル開度判定部70hは、アクセル操作量判定手段であり、アクセル開度取得部70gにより取得されたアクセル開度PAPが、所定アクセル開度PAP1以上であるか否かを判定するものである。所定アクセル開度は、ハイブリッドECU70の記録媒体(図示せず)に予め記録されており、実施形態では10%程度である。アクセル開度判定部70hは、記録媒体に記録されている所定アクセル開度PAP1と、取得されたアクセル開度PAPとを比較し、取得されたアクセル開度PAPが、予め設定されている所定アクセル開度PAP1以上であるか否かを判定する。
【0037】
エンブレ駆動力設定部70iは、抵抗駆動力設定手段であり、設定されたシーケンシャル変速段Yおよび車速V(ペラシャフト回転数)に基づいてエンブレ駆動力Teを設定する。エンブレ駆動力設定部70iは、実施形態では、設定されたシーケンシャル変速段Yと、車速V(ペラシャフト回転数)と、図10に示すようなシーケンシャル変速段Y、車速V(ペラシャフト回転数)、エンブレ駆動力Teの関係が設定されたエンブレ駆動力Teを設定するためのマップとに基づいてシーケンシャル変速段Yごとのエンブレ駆動量Teを設定するものである。ここで、設定されるエンブレ駆動力Teは、取得されたアクセル開度PAPが0などのハイブリッド車両20の被駆動状態において、ハイブリッド車両20に作用させる要求駆動力Tnである。
【0038】
なお、ハイブリッドECU70は、トルク変換運転モード、充放電運転モード、モータ運転モードなどに基づいて、エンジンECU24にエンジン22の運転制御、モータECU40にMG1の力行制御および回生制御、モータECU40にMG2の力行制御および回生制御を行わせるものである。
【0039】
トルク変換運転モードは、要求駆動力Tnに見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが遊星歯車機構30とMG1とMG2とによってトルク変換されてリングギヤ軸32aに出力されるようMG1およびMG2を駆動制御する運転モードである。
【0040】
充放電運転モードは、要求駆動力Tnとバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が遊星歯車機構30とMG1とMG2とによるトルク変換を伴って要求動力がリングギヤ軸32aに出力されるようMG1およびMG2を駆動制御する運転モードである。
【0041】
モータ運転モードは、エンジン22の運転を停止してMG2からの要求駆動力Tnに見合う動力をリングギヤ軸32aに出力するよう駆動制御する運転モードである。
【0042】
本実施形態では、運転者によりシフトレバー81が前進ポジション(D)や後進ポジション(R)に操作されたときに、エンジン22の効率やバッテリ50の蓄電状態に基づいて上述したトルク変換運転モード、充放電運転モード、モータ運転モードのうちのいずれかのモードでエンジン22の運転制御、MG1、MG2の駆動制御を行う。
【0043】
また、運転者の操作により、シフトレバー81が前進ポジション(D)に位置しているときのエンジン22の運転停止は、駆動軸としてのリングギヤ軸32aの要求駆動力Tnとバッテリ50の充放電に必要な動力との和として車両全体に要求される動力が、エンジン22を効率よく運転できる範囲を定める所定動力未満のときに行なわれる。
【0044】
次に、本実施形態にかかるハイブリッド制御装置の動作について説明する。ここで、ハイブリッド制御装置の動作は、制御周期ごとに繰り返し実行される。
【0045】
まず、図2および図3に示すように、ハイブリッドECU70は、アクセル開度PAPと、車速V(ペラシャフト回転数)、前回シーケンシャル変速段Ylastの取得を行う(ステップS001)。
【0046】
次に、ハイブリッドECU70の要求駆動力設定部70aは、要求駆動力Tnを設定する(ステップS002)。ここでは、要求駆動力設定部70aは、上述のように、アクセル開度取得部70gにより取得されたアクセル開度PAPと、車速センサ88により検出された車速V(ペラシャフト回転数)と、図4に示すような要求駆動力Tnを設定するためのマップとに基づいて要求駆動力Tnを設定する。
【0047】
次に、ハイブリッドECU70は、要求パワーPを設定する。そして、ハイブリッドECU70の目標エンジン回転数設定部70bは、設定された要求パワーPに基づいて目標エンジン回転数Neoを設定する(ステップS003)。ここでは、ハイブリッドECU70は、上記要求駆動力設定部70aにより設定された要求駆動力Tnと、車速センサ88により検出された車速V(ペラシャフト回転数)とに基づいて要求パワーPを設定する。ここで、要求パワーP=要求駆動力Tn×ペラシャフト回転数である。また、目標エンジン回転数設定部70bは、設定された要求パワーPと、図5に示すような目標エンジン回転数Neoを設定するためのマップとに基づいて目標エンジン回転数Neoを設定する。具体体には、目標エンジン回転数設定部70bは、マップに設定されているエンジン22の燃費最適線301と要求パワーPとに基づいて目標エンジン回転数Neoを設定する。例えば、同図に示すように、設定された要求駆動力Tnから設定された要求パワーがP1である場合、目標エンジン回転数NeoはNeaに設定される。
【0048】
次に、ハイブリッドECU70の目標変速段設定部70cは、目標変速段Xを設定する(ステップS004)。ここでは、目標変速段設定部70cは、上述のように、要求駆動力設定部70aにより設定された要求駆動力Tnと、アクセル開度取得部70gにより取得されたアクセル開度PAPあるいは車速センサ88により検出された車速V(ペラシャフト回転数)と、図6に示すように目標変速段Xを設定するためのマップとに基づいて目標変速段Xを設定する。
【0049】
ここで、目標変速段設定部70cによる目標変速段Xの設定方法は、上記図6に示す目標変速段Xを設定するためのマップを用いる方法に限定されない。例えば、上記ステップS003において設定された目標エンジン回転数Neoと、上記ステップS001において取得された車速V(ペラシャフト回転数)とに基づいて、変速比を設定し、設定された変速比と、図8に示すような変速比と変速段との関係が設定されたマップとに基づいて目標変速段Xを設定しても良い。また、例えば、上記ステップS003において設定された目標エンジン回転数Neoと、上記ステップS001において取得された車速V(ペラシャフト回転数)と、図7に示すような各変速段最低エンジン回転数、車速V(ペラシャフト回転数)の関係が設定された目標変速段Xを設定するためのマップとに基づいて目標変速段Xを設定しても良い。なお、同図において、401は目標変速段Xが1速の領域、402は同2速の領域、403は同3速の領域、404は同4速の領域、405は同5速の領域、406は同6速の領域をそれぞれ示している。例えば、設定された目標エンジン回転数NeoがNeaであり、車速V(ペラシャフト回転数)がV1であると、目標変速段Xは5速に設定される。
【0050】
次に、ハイブリッドECU70のシーケンシャルシフトモード判定部70dは、シーケンシャルシフトモードであるか否か、すなわちシーケンシャルシフトモード実行中であるか否かを判定する(ステップS005)。ここでは、シーケンシャルシフトモード判定部70dは、運転者の操作によりシフトレバー81がシーケンシャルシフトポジション(S)に位置していることをシフトポジションセンサ82が検出したか否かを判定する。
【0051】
次に、ハイブリッドECU70は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードでないと判定される(ステップS005否定)と、前回のシーケンシャル変速段Ylastをクリアする(ステップS021)。ここでは、ハイブリッドECU70は、運転者の操作によりシフトレバー81がシーケンシャルシフトポジション(S)(シフトアップポジション(+)およびシフトダウンポジション(−)を含む)以外のポジションに位置したとシフトポジションセンサ82が検出すると、シーケンシャル変速段設定部70eにより設定されるシーケンシャル変速段Yをクリアする。従って、ハイブリッドECU70は、制御周期において、前回のシーケンシャル変速段Ylastを取得することができない。
【0052】
次に、ハイブリッドECU70は、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する(ステップS022)。ここでは、ハイブリッドECU70は、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモード実行中でないと判定される(ステップS005否定)と、上記ステップS001において要求駆動力設定部70aにより設定された要求駆動力Tnと、上記ステップS003において目標エンジン回転数設定部70bにより設定された要求駆動力Tnに基づいて設定された目標エンジン回転数Neoとに基づいて、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する。なお、ハイブリッドECU70は、設定された目標エンジン回転数Neoおよび目標エンジントルクをエンジンECU24に出力し、設定された目標MG1回転数、目標MG1トルク、目標MG2トルクをモータECU40に出力する。そして、エンジンECU24は、設定された目標エンジン回転数Neoおよび目標エンジントルクに基づいてエンジン22の運転制御を行う。また、モータECU40は、設定された目標MG1回転数、目標MG1トルクに基づいてMG1を駆動制御し、設定された目標MG2トルクに基づいてMG2を駆動制御する。
【0053】
また、ハイブリッドECU70のシーケンシャル変速段設定部70eは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモード実行中であると判定される(ステップS005肯定)と、取得された前回のシーケンシャル変速段Ylastがあるか否かを判定する(ステップS006)。ここでは、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがあるか否かを判定することで、シーケンシャルシフトモードの開始時であるか、あるいはシーケンシャルシフトモードが継続中であるかのいずれかを判定する。
【0054】
次に、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがあると判定する(ステップS006肯定)と、取得された前回のシーケンシャル変速段Ylastをシーケンシャル変速段Yに設定する(ステップS007)。ここでは、シーケンシャル変速段設定部70eは、シーケンシャルシフトモードが継続中であると判定すると、前回の制御周期でシーケンシャル変速段設定部70eにより設定された前回のシーケンシャル変速段Ylastを現在のシーケンシャル変速段Yに設定する。
【0055】
また、シーケンシャル変速段設定部70eは、取得された前回のシーケンシャル変速段Ylastがないと判定する(ステップS006否定)と、目標変速段設定部70cにより設定された目標変速段Xをシーケンシャル変速段Yに設定する(ステップS008)。ここでは、シーケンシャル変速段設定部70eは、シーケンシャルシフトモードが開始された直後であると判定すると、設定された要求駆動力Tnに基づいて設定された目標エンジン回転数Neoに基づいて設定された目標変速段Xをシーケンシャルシフトモード開始時のシーケンシャル変速段Yに設定する。
【0056】
次に、ハイブリッドECU70のシーケンシャル変速段変更判定部70fは、変速が行われたか否かを判定する(ステップS009)。ここでは、シーケンシャル変速段変更判定部70fは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)、あるいはシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、運転者の操作によりアップシフトあるいはダウンシフトのいずれかが行われたか否かを判定する。
【0057】
次に、シーケンシャル変速段設定部70eは、シーケンシャル変速段変更判定部70fにより変速が行われたと判定される(ステップS009肯定)と、変速に基づいてシーケンシャル変速段Yを設定する(ステップS010)。ここでは、シーケンシャル変速段設定部70eは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトアップポジション(+)に位置したとシフトポジションセンサ82が検出することで、シーケンシャル変速段変更判定部70fにより運転者の操作によりアップシフトが行われたと判定されると、シーケンシャル変速段Yを現在設定されているシーケンシャル変速段Yに1段(1速)増加して設定する(Y=Y+1)。また、シーケンシャル変速段設定部70eは、運転者の操作によりシーケンシャルシフトポジション(S)に位置するシフトレバー81がシフトダウンポジション(−)に位置したとシフトポジションセンサ82が検出することで、シーケンシャル変速段変更判定部70fにより運転者の操作によりダウンシフトが行われたと判定されると、シーケンシャル変速段Yを現在設定されているシーケンシャル変速段Yに1段(1速)減少して設定する(Y=Y−1)。
【0058】
次に、目標エンジン回転数設定部70bは、設定されたシーケンシャル変速段Yと、取得された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定する(ステップS011)。ここでは、目標エンジン回転数設定部70bは、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されると、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Y(変速が行われていない場合は前回のシーケンシャル変速段Y(=Ylast)、変速が行われている場合は変速後のシーケンシャル変速段Y(=Y±1))と、車速センサ88により取得された車速Vとに基づいて設定される。例えば、目標エンジン回転数設定部70bは、上記推定変速段ごとに変速比を予め設定しておき、シーケンシャル変速段Yと一致する推定変速段に対応する変速比と、取得された車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoを設定しても良い。
【0059】
次に、エンブレ駆動力設定部70iは、現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを設定する(ステップS012)。ここでは、エンブレ駆動力設定部70iは、上述のように、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Yと、取得された車速V(ペラシャフト回転数)と、図10に示すようなエンブレ駆動力Teを設定するためのマップとに基づいて現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを設定する。
【0060】
次に、ハイブリッドECU70は、トルク比tを設定する(ステップS013)。ハイブリッドECU70は、シーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebと、上記エンブレ駆動力設定部70iにより設定された現在のシーケンシャル変速段Y(設定されたシーケンシャル変速段Y)に基づいたエンブレ駆動力Teyとの比であるトルク比t(=Tey/Teb)を設定する。ここで、エンブレ駆動力Tebは、エンブレ駆動力設定部70iによりシーケンシャル変速段Yのうち最低段である1速段(Y=1)と、取得された車速V(ペラシャフト回転数)と、図10に示すようなエンブレ駆動力Teを設定するためのマップとに基づいてエンブレ駆動力設定部70iにより設定される。
【0061】
次に、要求駆動力設定部70aは、設定されたトルク比tが0未満であるか否かを判定する(ステップS014)。
【0062】
次に、要求駆動力設定部70aは、設定されたトルク比tが0未満であると判定する(ステップS014肯定)と、トルク比tを0とする(ステップS015)。ここでは、要求駆動力設定部70aは、設定されたトルク比tが負の値であると判定すると、要求駆動力Tnを0に設定できるように、トルク比tを0に設定する。エンブレ駆動力設定部70iにより設定されるシーケンシャル変速段Yごとのエンブレ駆動力Teは、図10に示すようなエンブレ駆動力Teを設定するためのマップにおいて車速Vが極低車速(ペラシャフト回転数が数百rpm以下)の場合を除き、ハイブリッド車両20の通常走行時では負の値に設定されるので、トルク比tが正の値となる。しかしながら、同図に示すように、車速Vが極低車速(ペラシャフト回転数が数百rpm以下)の場合は、例えばシーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebが負の値に設定され、現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyが正の値に設定されることがあり、トルク比tが負の値となることがある。つまり、ハイブリッド車両20が極低車速近傍で走行している場合は、トルク比が正の値と負の値とで切り替わることとなり、トルク比に基づいて設定される要求駆動力Tnが正の値と負の値とで切り替わる虞がある。従って、要求駆動力設定部70aは、トルク比tに基づいて設定される要求駆動力Tnが負の値となる場合は、トルク比tを0として要求駆動力Tnを0に設定することで、要求駆動力Tnの急変を抑制することができ、運転者に与える違和感を抑制することができる。
【0063】
また、要求駆動力設定部70aは、設定されたトルク比tが0以上であると判定する(ステップS014否定)と、1を超えるか否かを判定する(ステップS016)。
【0064】
次に、要求駆動力設定部70aは、設定されたトルク比tが1を超えると判定する(ステップS016肯定)と、トルク比tを1とする(ステップS017)。ここでは、要求駆動力設定部70aは、設定されたトルク比tが1を超えると判定すると、要求駆動力Tnをトルク比tに基づいて設定してもトルク比tに基づいて設定する前、すなわちアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnと同じ値に設定できるように、トルク比tを1に設定する。図10に示すようなエンブレ駆動力Teを設定するためのマップでは、同じ車速V(ペラシャフト回転数)である場合に、シーケンシャル変速段Yのうち最低段である1速段に基づいたエンブレ駆動力Tebが1速段を除いた他のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyよりも負の値側となるように設定されている。従って、通常、設定されるトルク比tが1を超えることはないので、トルク比tが1を超える場合は、異常であると判断し、1を超えるトルク比tをトルク比tの最大値である1に変更する。従って、要求駆動力設定部70aは、トルク比tに基づいて設定される要求駆動力Tnがアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnを超える場合は、トルク比tを1として、トルク比tに基づいて設定される要求駆動力Tnをアクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnと同じ値とすることで、運転者が減速感を体感できない状況が発生することを抑制し、運転者に与える違和感を抑制することができる。
【0065】
次に、アクセル開度判定部70hは、アクセル開度PAPが所定アクセル開度PAP1以上であるか否かを判定する(ステップS018)。ここでは、アクセル開度判定部70hは、アクセル開度取得部70gにより取得されたアクセル開度PAPが予め設定されている所定アクセル開度PAP1以上であるか否かを判定することで、ハイブリッド車両20が駆動状態であるか否か判定する。
【0066】
次に、要求駆動力設定部70aは、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1以上であると判定される(ステップS013肯定)と、設定されたトルク比tに基づいて設定された要求駆動力Tnを変更する(ステップS019)。ここでは、要求駆動力設定部70aは、実施形態では、シーケンシャルシフトモード判定部70dによりシーケンシャルシフトモードであると判定されるとともに、アクセル開度PAPが所定アクセル開度PAP1以上であると判定されると、アクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnに、設定したトルク比tを乗算したものを要求駆動力Tnに設定することで、アクセル開度PAPおよび車速Vに基づいて設定された要求駆動力Tnを変更する。ここで、上述のように、トルク比tが0以上かつ1以下の値に設定されるため、トルク比tに基づいて設定される要求駆動力Tnは、0以上アクセル開度PAPと車速Vから設定された要求駆動力Tn以下となる。つまり、設定される要求駆動力Tnは、シーケンシャルシフトモード時であるか否かで変化する。さらに、その変化は、シーケンシャル変速段Yによっても変化することとなる。
【0067】
また、要求駆動力設定部70aは、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1未満であると判定される(ステップS018否定)と、要求駆動力Tnをエンブレ駆動力Teおよびトルク比tに基づいて設定する(ステップS020)。ここでは、要求駆動力設定部70aは、エンブレ駆動力設定部70iにより設定された現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyに補正値αを加えた値を要求駆動力Tnに設定する。ここで、αは、現在のシーケンシャル変速段Yに基づいた値であり、例えば、所定アクセル開度PAP1および車速V(ペラシャフト回転数)に基づいて設定される所定アクセル開度時要求駆動力Te1にトルク比tを乗算し、さらにそこから現在のシーケンシャル変速段Yに基づいたエンブレ駆動力Teyを減算し、そしてアクセル開度PAPと所定アクセル開度PAP1との比(PAP/PAP1)を乗算した値とする((Te1×t−Tey)×(PAP/PAP1))。従って、アクセル開度判定部70hにより取得されたアクセル開度PAPが所定アクセル開度PAP1未満であると判定される場合に設定される要求駆動力Tnは、アクセル開度PAPが0の時がエンブレ駆動力Teとなり、アクセル開度PAPが所定アクセル開度PAP1に向かって増加するに伴いエンブレ駆動力Teから所定アクセル開度時要求駆動力Te1にトルク比tを乗算した値に増加する。
【0068】
次に、ハイブリッドECU70は、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する(ステップS022)。ここでは、ハイブリッドECU70は、目標エンジン回転数設定部70bにより設定された目標エンジン回転数Neoおよび要求駆動力設定部70aにより設定された要求駆動力Tnに基づき、目標エンジントルク、目標MG1回転数、目標MG1トルク、目標MG2トルクを設定する。エンジン22の目標エンジン回転数、目標エンジントルクの値についてはエンジンECU24に、目標MG1回転数、目標MG1トルク、目標MG2トルクの値についてはモータECU40にそれぞれ送信される。
【0069】
上述のように、本実施形態にかかるハイブリッド車両20においては、シーケンシャルシフトモード時でない場合、アクセル開度PAPと車速V(ペラシャフト回転数)に基づいて要求駆動力Tnが設定され、要求駆動力Tnに基づいて目標エンジン回転数Neoが設定され、設定された要求駆動力Tnおよび目標エンジン回転数Neoに基づいてエンジン22の運転制御、MG1およびMG2の駆動制御が行われる。一方、シーケンシャルシフトモード時である場合、運転者がシフトレバー81を操作することにより設定されたシーケンシャル変速段Yと車速V(ペラシャフト回転数)とに基づいて目標エンジン回転数Neoが設定され、また設定されたトルク比tに基づいて要求駆動力Tnが設定され、設定された目標エンジン回転数Neoおよび要求駆動力Tnに基づいてエンジン22の運転制御、MG1およびMG2の駆動制御が行われる。
【0070】
以上のように、実施形態にかかるハイブリッド車両20では、要求駆動力設定部70aにより設定された要求駆動力Teを操作変速段であるシーケンシャル変速段Yに基づいて変更する。ここでは、シーケンシャル変速段設定部70eにより設定されたシーケンシャル変速段Yにおけるエンブレ駆動力Teyと、シーケンシャル変速段Yのうち最低段である1速段におけるエンブレ駆動力Tebとの抵抗駆動力比であるトルク比tに基づいて要求駆動力Tnを変更するので、要求駆動力Tnが各シーケンシャル変速段Yに対応して変化する。従って、シーケンシャル変速段変更判定部70fにより運転者の操作により変速が行われたと判定され、運転者の操作によりシーケンシャル変速段Yが変更された際には、要求駆動力Tnが変速後のシーケンシャル変速段Yに対応して変更されるので、変速時にハイブリッド車両20の駆動力が変化し、運転者に自然な変速感を体感させることができる。
【0071】
上記実施形態では、シーケンシャル変速段Yごとに異なるエンブレ駆動力に基づいてトルク比tを設定し、設定されたトルク比tに基づいて要求駆動力Teを算出したが、本発明はこれに限定されるものではなく、シーケンシャル変速段Yの変速時に駆動力段差が生じるシーケンシャル変速段Yごとに異なるパラメータであればそれを用いても良い。
【産業上の利用可能性】
【0072】
以上のように、本発明にかかるハイブリッド車両は、内燃機関と、第一の電動発電機と、内燃機関と第一の電動発電機からの動力を合成または分配する動力合成分配機構と、動力合成分配機構と駆動輪の間に設けられた第二の電動発電機とを備えるハイブリッド車両に有用であり、特に、運転者の操作により変速が行われた際に、運転者に変速感を体感させるのに適している。
【図面の簡単な説明】
【0073】
【図1】実施形態にかかるハイブリッド車両の概略構成を示すブロック図である。
【図2】実施形態にかかるハイブリッド車両の基本動作フローを示す図である。
【図3】実施形態にかかるハイブリッド車両の基本動作フローを示す図である。
【図4】実施形態にかかるハイブリッド車両の要求駆動力を設定するためのマップを示す図である。
【図5】実施形態にかかるハイブリッド車両の目標エンジン回転数を設定するためのマップを示す図である。
【図6】実施形態にかかるハイブリッド車両の目標変速段を設定するためのマップを示す図である。
【図7】実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。
【図8】実施形態にかかるハイブリッド車両の目標変速段を設定するための他のマップを示す図である。
【図9】実施形態にかかるハイブリッド車両のシフトレバーとシフトポジションを示す図である。
【図10】実施形態にかかるハイブリッド車両のエンブレ駆動力を設定するためのマップを示す図である。
【符号の説明】
【0074】
20 ハイブリッド車両
22 エンジン(内燃機関)
24 エンジンECU(ハイブリッド制御装置)
26 クランクシャフト
28 ダンパ
30 遊星歯車機構
31 サンギヤ
32 リングギヤ
32a リングギヤ軸(駆動軸)
33 ピニオンギヤ
34 キャリア
35 減速ギヤ
40 モータECU(ハイブリッド制御装置)
41 インバータ
42 インバータ
43 回転位置検出センサ
44 回転位置検出センサ
50 バッテリ(蓄電装置)
51 温度センサ
52 バッテリECU(ハイブリッド制御装置)
54 電力ライン
60 ギヤ機構
62 デファレンシャルギヤ
63a 駆動輪
63b 駆動輪
70 ハイブリッドECU(ハイブリッド制御装置)
70a 要求駆動力設定部(要求駆動力設定手段)
70b 目標エンジン回転数設定部(目標機関回転数設定手段)
70c 目標変速段設定部(目標変速段設定手段)
70d シーケンシャルシフトモード判定部(変速段操作モード判定手段)
70e シーケンシャル変速段設定部(操作変速段設定手段)
70f シーケンシャル変速段変更判定部(操作変速段変更判定手段)
70g アクセル開度取得部(アクセル操作量取得手段)
70h アクセル開度判定部(アクセル操作量判定手段)
70i エンブレ駆動力設定部(抵抗駆動力設定手段)
80 イグニッションスイッチ
81 シフトレバー
82 シフトポジションセンサ
83 アクセルペダル
84 アクセルペダルポジションセンサ
85 ブレーキペダル
86 ブレーキペダルポジションセンサ
88 車速センサ
401 1速の領域
402 2速の領域
403 3速の領域
404 4速の領域
405 5速の領域
406 6速の領域
PAP アクセル開度
MG1 第一の電動発電機
MG2 第二の電動発電機
SP シフトポジション
V 車速(ペラシャフト回転数)
【特許請求の範囲】
【請求項1】
内燃機関と、
第一の電動発電機と、
前記内燃機関および前記第一の電動発電機からの動力を合成または分配する動力合成分配機構と、
前記動力合成分配機構と駆動輪の間に設けられた第二の電動発電機と、
前記第一の電動発電機および前記第二の電動発電機との間で電力の授受を行う蓄電装置と、
前記内燃機関の運転制御、前記第一の電動発電機および前記第二の電動発電機のそれぞれに対して力行制御および回生制御、前記蓄電装置の蓄電制御および放電制御を行うハイブリッド制御装置と、
を備えたハイブリッド車両において、
前記ハイブリッド制御装置は、
運転者が要求する要求駆動力を設定する要求駆動力設定手段と、
前記設定された要求駆動力に基づいて前記内燃機関の目標機関回転数を設定する目標機関回転数設定手段と、
予め出力回転数を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中の前記パラメータに基づいて前記走行中の目標変速段を設定する目標変速段設定手段と、
運転者の操作により操作変速段の固定変更を行う変速段操作モードであるか否かを判定する変速段操作モード判定手段と、
前記設定された目標変速段を基準として、変速段操作モードにおける前記運転者の操作による操作変速段を設定する操作変速段設定手段と、
前記設定された操作変速段が変更されたか否かを判定する操作変速段変更判定手段と、
を有するとともに、
前記変速段操作モード判定手段により前記変速段操作モードであると判定されると、前記目標機関回転数設定手段が前記設定された操作変速段に基づいて前記目標機関回転数を設定し、前記要求駆動力設定手段が前記設定された要求駆動力を前記操作変速段に基づいて変更する
ことを特徴とするハイブリッド車両。
【請求項2】
請求項1に記載のハイブリッド車両において、
前記ハイブリッド制御装置は、
前記設定された操作変速段および前記出力回転数に基づいた抵抗駆動力を設定する抵抗駆動力設定手段をさらに有し、
前記要求駆動力設定手段は、前記設定された要求駆動力を前記設定された抵抗駆動力に基づいて変更することを特徴とするハイブリッド車両。
【請求項3】
請求項2に記載のハイブリッド車両において、
前記要求駆動力設定手段は、前記設定された操作変速段における抵抗駆動力と、前記操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて前記設定された要求駆動力を変更することを特徴とするハイブリッド車両。
【請求項4】
請求項3に記載のハイブリッド車両において、
前記要求駆動力設定手段は、前記抵抗駆動力比を0未満の場合は0とし、1を超える場合は1とすることを特徴とするハイブリッド車両。
【請求項1】
内燃機関と、
第一の電動発電機と、
前記内燃機関および前記第一の電動発電機からの動力を合成または分配する動力合成分配機構と、
前記動力合成分配機構と駆動輪の間に設けられた第二の電動発電機と、
前記第一の電動発電機および前記第二の電動発電機との間で電力の授受を行う蓄電装置と、
前記内燃機関の運転制御、前記第一の電動発電機および前記第二の電動発電機のそれぞれに対して力行制御および回生制御、前記蓄電装置の蓄電制御および放電制御を行うハイブリッド制御装置と、
を備えたハイブリッド車両において、
前記ハイブリッド制御装置は、
運転者が要求する要求駆動力を設定する要求駆動力設定手段と、
前記設定された要求駆動力に基づいて前記内燃機関の目標機関回転数を設定する目標機関回転数設定手段と、
予め出力回転数を含む複数のパラメータに基づいて設定された複数の推定変速段から、走行中の前記パラメータに基づいて前記走行中の目標変速段を設定する目標変速段設定手段と、
運転者の操作により操作変速段の固定変更を行う変速段操作モードであるか否かを判定する変速段操作モード判定手段と、
前記設定された目標変速段を基準として、変速段操作モードにおける前記運転者の操作による操作変速段を設定する操作変速段設定手段と、
前記設定された操作変速段が変更されたか否かを判定する操作変速段変更判定手段と、
を有するとともに、
前記変速段操作モード判定手段により前記変速段操作モードであると判定されると、前記目標機関回転数設定手段が前記設定された操作変速段に基づいて前記目標機関回転数を設定し、前記要求駆動力設定手段が前記設定された要求駆動力を前記操作変速段に基づいて変更する
ことを特徴とするハイブリッド車両。
【請求項2】
請求項1に記載のハイブリッド車両において、
前記ハイブリッド制御装置は、
前記設定された操作変速段および前記出力回転数に基づいた抵抗駆動力を設定する抵抗駆動力設定手段をさらに有し、
前記要求駆動力設定手段は、前記設定された要求駆動力を前記設定された抵抗駆動力に基づいて変更することを特徴とするハイブリッド車両。
【請求項3】
請求項2に記載のハイブリッド車両において、
前記要求駆動力設定手段は、前記設定された操作変速段における抵抗駆動力と、前記操作変速段のうち最低段における抵抗駆動力との抵抗駆動力比に基づいて前記設定された要求駆動力を変更することを特徴とするハイブリッド車両。
【請求項4】
請求項3に記載のハイブリッド車両において、
前記要求駆動力設定手段は、前記抵抗駆動力比を0未満の場合は0とし、1を超える場合は1とすることを特徴とするハイブリッド車両。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−18256(P2010−18256A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−183135(P2008−183135)
【出願日】平成20年7月14日(2008.7.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月14日(2008.7.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]