
ハイブリッド車両
【課題】走行に悪影響を及ぼすことなく、磁極位置補正量を求める学習処理を行う行うことが可能なハイブリッド車両を提供する。
【解決手段】位相補正器30は、内燃機関ENGが駆動し、第1クラッチC1が接続状態であり、且つ第1噛合機構SM1により第1入力軸4と出力軸3aとが選択的に連結されて、当該車両が走行する第1の走行状態では、磁極補正角θofsを第1の学習処理により求める。位相補正器30は、内燃機関ENGが駆動し、第2クラッチC2が接続状態であり、且つ第2噛合機構SM2により第2入力軸5と出力軸3aとが選択的に連結されて、当該車両が走行する第2の走行状態では、磁極補正角θofsを第2の学習処理により求める。
【解決手段】位相補正器30は、内燃機関ENGが駆動し、第1クラッチC1が接続状態であり、且つ第1噛合機構SM1により第1入力軸4と出力軸3aとが選択的に連結されて、当該車両が走行する第1の走行状態では、磁極補正角θofsを第1の学習処理により求める。位相補正器30は、内燃機関ENGが駆動し、第2クラッチC2が接続状態であり、且つ第2噛合機構SM2により第2入力軸5と出力軸3aとが選択的に連結されて、当該車両が走行する第2の走行状態では、磁極補正角θofsを第2の学習処理により求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関、回転電機及び自動変速機を備えるハイブリッド車両に関する。
【背景技術】
【0002】
内燃機関及び/又は回転電機のトルクにより走行するハイブリッド車両においては、回転電機の回転子の磁極位置をレゾルバ等の磁極位置検出器によって検出し、電機子に印加される三相交流電圧の位相を磁極位置に応じて制御するように構成されている。
磁極位置検出器の組付誤差や製造誤差等によって、検出される磁極位置は実際の磁極位置に対して誤差がある。そこで、電機子に流れる電流(固定子電流)が「0」の状態で界磁軸電圧指令値が「0」になるように磁極位置補正量を求める学習処理を行う必要がある。
【0003】
特許文献1には、内燃機関の出力軸と連動して回転子が回転するように構成されたハイブリッド車両における学習処理が開示されている。又、特許文献2には、内燃機関の出力軸と回転子がクラッチを介して接続されるように構成されたハイブリッド車両における学習処理が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3688673号公報
【特許文献2】特開2008−72858号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ハイブリッド車両には、第1断接手段を介して選択的に内燃機関のトルクが伝達され、回転子に接続された第1入力軸、第2断接手段を介して選択的に内燃機関のトルクが伝達される第2入力軸、第1入力軸と出力軸を選択的に連結する第1選択手段、及び第2入力軸と出力軸を選択的に連結する第2選択手段を有し、内燃機関及び回転電機から出力される動力を変速して出力軸に伝達する自動変速機を介して、内燃機関と回転電機とが接続されて構成されたものがある。
【0006】
このようなハイブリッド車両の場合には、前記特許文献1又は2に開示された学習処理を走行中に行うと、予期しないトルクが出力軸に伝達され、走行に悪影響を及ぼすおそれがある。
【0007】
本発明は、走行に悪影響を及ぼすことなく、磁極位置補正量を求める学習処理を行う行うことが可能なハイブリッド車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のハイブリッド車両は、内燃機関と、回転子及び固定子にそれぞれ永久磁石及び電機子を設けた永久磁石式回転電機と、第1断接手段を介して選択的に前記内燃機関のトルクが伝達され、前記回転子に接続された第1入力軸、第2断接手段を介して選択的に前記内燃機関のトルクが伝達される第2入力軸、前記第1入力軸と出力軸を選択的に連結する第1選択手段、及び前記第2入力軸と出力軸を選択的に連結する第2選択手段を有し、前記内燃機関及び前記回転電機から出力される動力を変速して前記出力軸に伝達する自動変速機と、前記回転子の磁極位置を検出する磁極位置検出手段と、該磁極位置検出手段により検出される磁極位置を補正するための磁極位置補正量を求める補正量決定手段と、前記磁極位置検出手段により検出された磁極位置を前記補正量決定手段により求められた磁極位置補正量で補正してなる磁極位置に応じて前記電機子に印加する電機子電圧の位相を操作しつつ、該電機子に流れる電機子電流を制御する電流制御手段とを備え、前記補正量決定手段は、前記内燃機関が駆動し、前記第1断接手段が接続状態であり、且つ前記第1選択手段により前記第1入力軸と出力軸とが選択的に連結されて、当該車両が走行する第1の走行状態では、前記磁極位置補正量を第1の学習処理により求め、前記内燃機関が駆動し、前記第2断接手段が接続状態であり、且つ前記第2選択手段により前記第2入力軸と出力軸とが選択的に連結されて、当該車両が走行する第2の走行状態では、前記磁極位置補正量を第2の学習処理により求めることを特徴とする。
【0009】
本発明のハイブリッド車両によれば、第1の走行状態では第1の学習処理により磁極位置補正量を求め、第2の走行状態では第2の学習処理により磁極位置補正量を求める。そのため、第1及び第2の走行状態において、それぞれ磁極位置補正量を求めるために必要となるトルクが出力軸に伝達されないように、第1及び第2の学習処理を適切なものとすることにより、予期しないトルクが出力軸に伝達されることを防止可能となる。
【0010】
更に、第1及び第2の何れの走行状態においても学習処理を行うことが可能であるので、適切な磁極位置補正量を用いて電流制御手段が電機子電流を制御する正常な状態に早急に移行できる。
【0011】
本発明のハイブリッド車両において、前記第1の学習処理は、前記回転子が回転している状態で、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記磁極位置補正量を所定の仮設定値に定めて該ベクトル制御の処理を実行し、該ベクトル制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることが好ましい。
【0012】
この場合、内燃機関の駆動により第1断接手段を介して回転する第1入力軸に接続された回転子が回転している状態で、磁極位置補正量を求める第1の学習処理が行われ、高精度の磁極位置補正量を求めることができる。そして、この第1の学習処理は界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持して行われるので、回転電機はトルクを出力せず、第1の学習処理中に予期しないトルクが出力軸に伝達されない。
【0013】
又、本発明のハイブリッド車両において、前記第2の学習処理は、前記第1選択手段を連結解除状態にして、前記回転電機を駆動させて前記回転子の回転速度を一旦上昇させた後、前記回転子の回転速度の下降中に、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記回転電機を取扱うトルク制御におけるトルク指令値を所定の仮設定値に定めて該トルク制御の処理を実行し、該トルク制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることが好ましい。
【0014】
この場合、第1選択手段が連結解除状態であり、回転子が接続された第1入力軸と出力軸との接続が遮断されているので、回転電機を駆動させて回転子の回転速度を上昇させても、この回転電機からのトルクが出力軸に伝達されない。そのため、第2の学習処理中に予期しないトルクが出力軸に伝達されない。そして、回転子の回転速度を上昇させるので、この第2の学習処理によって高精度の磁極位置補正量を求めることができる。
【0015】
尚、学習処理を行い適切な磁極位置補正量を求めるまで、電流制御手段は磁極位置に応じて電機子に印加する電機子電圧の位相を適切に操作できないので、回転電機は必要なトルクを精度良く出力することができない。
【0016】
このような場合、回転電機のトルクのみにより当該車両を走行させると、走行が不安定となる。そこで、本発明のハイブリッド車両において、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記回転電機のトルクのみによる当該車両の走行を禁止することが好ましい。
【0017】
又、電流制御手段が電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を電機子に印加すると、電機子電圧が共振するおそれがある。そこで、本発明のハイブリッド車両において、前記電流制御手段は、前記補正量決定手段により前記磁極位置補正量を求めた後、前記電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を前記電機子に印加するように制御することが好ましい。
【0018】
又、回転電機が必要なトルクを精度良く出力することができないので、回転電機のトルクを用いて発生させる断接手段の接続トルクの精度が悪化し、内燃機関の始動を確実に行うことができないおそれがある。そこで、本発明のハイブリッド車両において、前記内燃機関に接続される電動機を備え、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記電動機を駆動させて前記内燃機関を始動させることが好ましい。
【0019】
尚、車両が前記電動機を備えない場合、本発明のハイブリッド車両において、前記内燃機関の始動時に前記回転電機を取扱うトルク制御におけるトルク指令値を設定する始動時トルク指令値設定手段を備え、該始動時トルク指令値設定手段は、前記補正量決定手段により前記磁極位置補正量を求めるまで、第1のトルク指令値を設定し、前記補正量決定手段により前記磁極位置補正量を求めた後、前記第1のトルク指令値より高い第2のトルク指令値を設定することが好ましい。これにより、回転電機の力率や効率の低下を補うことができ、内燃機関を確実に始動させることが可能となる。
【0020】
又、回転電機の力率や効率が低下しているので、エアコンディショナが安定的に作動しない。そこで、本発明のハイブリッド車両において、第3断接手段を介して選択的に前記第1入力軸に接続されるエアコンディショナ用コンプレッサを備え、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記第3断接手段を伝達状態にすることを禁止することが好ましい。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係るハイブリッド車両を示す説明図。
【図2】モータ制御装置の構成示すブロック図。
【図3】学習処理の原理を説明するための図。
【図4】動力制御装置及びモータ制御装置での処理を示すフローチャート。
【図5】図4のS7の学習処理を示すフローチャート。
【図6】図4のS12の学習処理を示すフローチャート。
【図7】図4のS12の学習処理を説明するための図。
【発明を実施するための形態】
【0022】
本発明の実施形態に係るハイブリッド車両について図面を参照して説明する。
【0023】
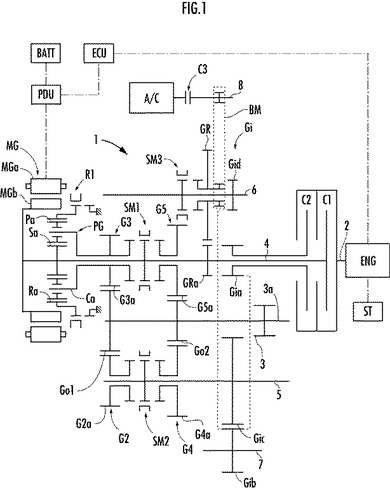
図1に示すように、ハイブリッド車両は、エンジンからなる内燃機関ENG、永久磁石式回転電機であるモータMG、モータMGと電力を授受する二次電池からなる蓄電装置BATT、自動変速機1、内燃機関ENGを始動可能な電動機からなるスタータST、及び内燃機関ENG、モータMG、自動変速機1、スタータSTの各部を制御する動力制御装置ECU(Electronic Control Unit)を備える。
【0024】
自動変速機1は、内燃機関ENGのトルク(駆動力)が伝達されるエンジン出力軸2と、図外のディファレンシャルギヤを介して駆動輪としての左右の前輪にトルクを出力する出力ギヤからなる出力部材3と、変速比の異なる複数のギヤ列G2〜G5とを備える。
【0025】
又、自動変速機1は、変速比順位で奇数番目の各変速段を確立する奇数番ギヤ列G3,G5の駆動ギヤG3a,G5aを回転自在に軸支する第1入力軸4と、変速比順位で偶数番目の変速段を確立する偶数番ギヤ列G2,G4の駆動ギヤG2a,G4aを回転自在に軸支する第2入力軸5と、リバースギヤGRを回転自在に軸支するリバース軸6を備える。尚、第1入力軸4はエンジン出力軸2と同一軸線上に配置され、第2入力軸5及びリバース軸6は第1入力軸4と平行に配置されている。
【0026】
又、自動変速機1は、第1入力軸4に回転自在に軸支されたアイドル駆動ギヤGiaと、アイドル軸7に固定されアイドル駆動ギヤGiaに噛合する第1アイドル従動ギヤGibと、第2入力軸5に固定された第2アイドル従動ギヤGicと、リバース軸6に固定され第1アイドル駆動ギヤGibに噛合する第3アイドル従動ギヤGidとで構成されるアイドルギヤ列Giを備える。尚、アイドル軸7は第1入力軸4と平行に配置されている。
【0027】
自動変速機1は、油圧作動型の乾式摩擦クラッチ又は湿式摩擦クラッチからなる第1クラッチC1及び第2クラッチC2を備える。第1クラッチC1は、エンジン出力軸2に伝達された内燃機関ENGのトルクを第1入力軸4に伝達させる伝達状態と、この伝達を断つ開放状態とに切換自在に構成されている。第2クラッチC2は、エンジン出力軸2に伝達された内燃機関ENGのトルクを第2入力軸5に伝達させる伝達状態と、この伝達を断つ開放状態とに切換自在に構成されている。第2クラッチC2を締結させて伝達状態とすると、エンジン出力軸2は第1アイドル駆動ギヤGib及び第2アイドル駆動ギヤGicを介して第2入力軸5に連結される。
【0028】
両クラッチC1,C2は、素早く状態が切換えられるように電気式アクチュエータにより作動されるものであることが好ましい。尚、両クラッチC1,C2は、油圧式アクチュエータにより作動されるものであってもよい。
【0029】
又、自動変速機1には、エンジン出力軸2と同軸上に位置させて、差動回転機構である遊星歯車機構PGが配置されている。遊星歯車機構PGは、サンギヤSaと、リングギヤRaと、サンギヤSa及びリングギヤRaに噛合するピニオンPaを自転及び公転自在に軸支するキャリアCaとからなるシングルピニオン型で構成される。
【0030】
遊星歯車機構PGのサンギヤSa、キャリアCa、リングギヤRaからなる3つの回転要素を、速度線図(各回転要素の相対的な回転速度を直線で表すことができる図)におけるギヤ比に対応する間隔での並び順にサンギヤSa側から夫々第1回転要素、第2回転要素、第3回転要素とすると、第1回転要素はサンギヤSa、第2回転要素はキャリアCa、第3回転要素はリングギヤRaとなる。
【0031】
そして、遊星歯車機構PGのギヤ比(リングギヤRaの歯数/サンギヤSaの歯数)をgとして、第1回転要素たるサンギヤSaと第2回転要素たるキャリアCaの間の間隔と、第2回転要素たるキャリアCaと第3回転要素たるリングギヤRaの間の間隔との比が、g:1となる。
【0032】
第1回転要素たるサンギヤSaは、第1入力軸4に固定されている。第2回転要素たるキャリアCaは、3速ギヤ列G3の3速駆動ギヤG3aに連結されている。第3回転要素たるリングギヤRaは、ロック機構R1により変速機ケース等の不動部に解除自在に固定される。
【0033】
ロック機構R1は、リングギヤRaが不動部に固定される固定状態、又はリングギヤRaが回転自在な開放状態の何れかの状態に切換自在なシンクロメッシュ機構で構成されている。
【0034】
尚、ロック機構R1は、シンクロメッシュ機構に限らず、スリーブ等による摩擦係合解除機構のほか、湿式多板ブレーキ、ハブブレーキ、バンドブレーキ等のブレーキや、ワンウェイクラッチ、2ウェイクラッチなどで構成してもよい。又、遊星歯車機構PGは、サンギヤと、リングギヤと、互いに噛合し一方がサンギヤ、他方がリングギヤに噛合する一対のピニオンPa、Pa’を自転及び公転自在に軸支するキャリアとからなるダブルピニオン型で構成してもよい。この場合、例えば、サンギヤ(第1回転要素)を第1入力軸4に固定し、リングギヤ(第2回転要素)を3速ギヤ列G3の3速駆動ギヤG3aに連結し、キャリア(第3回転要素)をロック機構R1で不動部に解除自在に固定するように構成すればよい。
【0035】
遊星歯車機構PGの径方向外方には、中空のモータMG(モータ・ジェネレータ)が配置されている。換言すれば、遊星歯車機構PGは、中空のモータMGの内方に配置されている。
【0036】
モータMGは、本実施形態では3相DCブラシレスモータであり、3相(U相、V相、W相)の巻き線から成る電機子(コイル)11(図2参照)を設けた固定子(ステータ)MGaと、永久磁石が設けられた回転子(ロータ)MGbを備えている。永久磁石は、円筒形のものでも、突極形のものであってもよい。
【0037】
又、モータMGは、動力制御装置ECUの指示信号に基づき、モータ制御装置(パワードライブユニット)PDUを介して制御される。動力制御装置ECUは、モータ制御装置PDUを、蓄電装置BATTの電力を消費してモータMGを駆動させる駆動状態と、回転子MGbの回転力を抑制させて発電し、発電した電力をモータ制御装置PDUを介して蓄電装置BATTに充電する回生状態とに適宜切換える。
【0038】
出力部材3を軸支する出力軸3aには、2速駆動ギヤG2a及び3速駆動ギヤG3aに噛合する第1従動ギヤGo1が固定されている。出力軸3aには、4速駆動ギヤG4a及び5速駆動ギヤG5aに噛合する第2従動ギヤGo2が固定されている。又、出力軸3aには、パーキングギヤGPが固定されている。
【0039】
このように、2速ギヤ列G2と3速ギヤ列G3の従動ギヤ、及び4速ギヤ列G4と5速ギヤ列G5の従動ギヤとを夫々1つのギヤGo1,Go2で構成することにより、自動変速機の軸長を短くすることができ、FF(前輪駆動)方式の車両への搭載性を向上させることができる。
【0040】
第1入力軸4には、シンクロメッシュ機構で構成され、3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態、5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態、3速駆動ギヤG3a及び5速駆動ギヤG5aと第1入力軸4との連結を断つニュートラル状態の何れかの状態に切換選択自在な第1選択手段である第1噛合機構SM1が設けられている。
【0041】
第2入力軸5には、シンクロメッシュ機構で構成され、2速駆動ギヤG2aと第2入力軸5とを連結した2速側連結状態、4速駆動ギヤG5aと第2入力軸5とを連結した4速側連結状態、2速駆動ギヤG2a及び4速駆動ギヤG5aと第2入力軸5との連結を断つニュートラル状態の何れかの状態に切換選択自在な第2選択手段である第2噛合機構SM2が設けられている。
【0042】
又、第1入力軸4には、リバースギヤGRに噛合するリバース従動ギヤGRaが固定されている。
【0043】
リバース軸6には、シンクロメッシュ機構で構成され、リバースギヤGRとリバース軸6とを連結した連結状態と、この連結を断つニュートラル状態の何れかの状態に切換選択自在な第3噛合機構SM3が設けられている。
【0044】
自動変速機1は、内燃機関ENG又はモータMGの動力を、車両に搭載されたエアコンディショナ用コンプレッサA/Cに伝達して駆動可能に構成されている。
【0045】
主入力軸11に対して、コンプレッサA/Cのコンプレッサ入力軸8がリバース軸6に配置されている。コンプレッサ入力軸8とリバースギヤGRとは、ベルト駆動機構BMを介して結合されている。これにより、第1入力軸4が回転しているとき、即ち、内燃機関ENG又はモータMG3が運転しているとき、コンプレッサ入力軸8は常に回転する。そして、コンプレッサA/Cは、第3クラッチC3を介してコンプレッサ入力軸8に接続されている。
【0046】
次に、上記の如く構成される自動変速機1の作動について説明する。
【0047】
自動変速機1では、第1クラッチC1を係合させることにより、モータMGのトルクを用いて内燃機関ENGを始動させるIMA始動を行うことができる。
【0048】
内燃機関ENGのトルクを用いて1速段を確立する場合には、ロック機構R1により遊星歯車機構PGのリングギヤRaを固定状態とし、第1クラッチC1を締結させて伝達状態とする。
【0049】
内燃機関ENGのトルクは、エンジン出力軸2、第1クラッチC1、第1入力軸4を介して、遊星歯車機構PGのサンギヤSaに入力され、エンジン出力軸2に入力された内燃機関ENGの回転数が1/(g+1)に減速されて、キャリアCaを介し3速駆動ギヤG3aに伝達される。
【0050】
3速駆動ギヤG3aに伝達されたトルクは、3速駆動ギヤG3a及び第1従動ギヤGo1で構成される3速ギヤ列G3のギヤ比(3速駆動ギヤG3aの歯数/第1従動ギヤGo1の歯数)をiとして、1/i(g+1)に変速されて第1従動ギヤGo1及び出力軸3aを介し出力部材3から出力され、1速段が確立される。このように、内燃機関ENGのトルクのみで走行するENG走行を行うことができる。
【0051】
このように、自動変速機1では、遊星歯車機構PG及び3速ギヤ列で1速段を確立できるため、1速段専用の噛合機構が必要なく、これにより、自動変速機の軸長の短縮化を図ることができる。
【0052】
尚、1速段において、車両が減速状態にあり、且つ蓄電装置BATTの残容量(充電率)SOCに応じて、動力制御装置ECUは、モータMGでブレーキをかけることにより発電を行う減速回生運転を行う。又、蓄電装置BATTの残容量SOCに応じて、モータMGを駆動させて、内燃機関ENGのトルクを補助するHEV(Hybrid Electric Vehicle)走行、又はモータMGのトルクのみで走行するEV(Electric Vehicle)走行を行うことができる。
【0053】
又、EV走行中であって車両の減速が許容された状態であり且つ車両速度が一定速度以上の場合には、第1クラッチC1を徐々に締結させることにより、モータMGのトルクを用いることなく、車両の運動エネルギーを用いて内燃機関ENGを始動させることができる。
【0054】
又、1速段で走行中に2速段にアップシフトされることを動力制御装置ECUが車両速度やアクセルペダルの開度等の車両情報から予測した場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結させる2速側連結状態又はこの状態に近付けるプリシフト状態とする。
【0055】
内燃機関ENGのトルクを用いて2速段を確立する場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結させた2速側連結状態とし、第2クラッチC2を締結して伝達状態とする。これにより、内燃機関ENGのトルクが、第2クラッチC2、アイドルギヤ列Gi、第2入力軸5、2速ギヤ列G2及び出力軸3aを介して、出力部材3から出力される。
【0056】
尚、2速段において、動力制御装置ECUがアップシフトを予測している場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態又はこの状態に近付けるプリシフト状態とする。
【0057】
逆に、動力制御装置ECUがダウンシフトを予測している場合には、第1噛合機構SM1を、第3駆動ギヤG3a及び第5駆動ギヤG5aと第1入力軸4との連結を断つニュートラル状態とする。
【0058】
これにより、アップシフト又はダウンシフトを、第1クラッチC1を伝達状態とし、第2クラッチC2を開放状態とするだけで行うことができ、変速段の切換えをトルクが途切れることなくスムーズに行うことができる。
【0059】
又、2速段においても、車両が減速状態にある場合、蓄電装置BATTの残容量SOCに応じて、動力制御装置ECUは、減速回生運転を行う。2速段において減速回生運転を行う場合には、第1噛合機構SM1が3速側連結状態であるか、ニュートラル状態であるかで異なる。
【0060】
第1噛合機構SM1が3速側連結状態である場合には、第2駆動ギヤG2aで回転される第1従動ギヤGo1によって回転する第3駆動ギヤG3aが第1入力軸4を介してモータMGの回転子MGbを回転させるため、この回転子MGbの回転を抑制しブレーキをかけることにより発電して回生を行う。
【0061】
第1噛合機構SM1がニュートラル状態である場合には、ロック機構R1を固定状態とすることによりリングギヤRaの回転数を「0」とし、第1従動ギヤGo1に噛合する3速駆動ギヤG3aと共に回転するキャリアCaの回転数を、サンギヤSaに連結させたモータMGにより発電させることによりブレーキをかけて、回生を行う。
【0062】
又、2速段においてHEV走行する場合には、例えば、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態として、ロック機構R1を開放状態とすることにより遊星歯車機構PGを各回転要素が相対回転不能な状態とし、モータMGのトルクを3速ギヤ列G3を介して出力部材3に伝達することにより行うことができる。又は、第1噛合機構SM1をニュートラル状態として、ロック機構R1を固定状態としてリングギヤRaの回転数を「0」とし、モータMGのトルクを1速段の経路で第1従動ギヤGo1に伝達することによっても、2速段によるHEV走行を行うことができる。
【0063】
内燃機関ENGのトルクを用いて3速段を確立する場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態として、第1クラッチC1を締結させて伝達状態とする。これにより、内燃機関ENGのトルクは、エンジン出力軸2、第1クラッチC1、第1入力軸4、第1噛合機構SM1、3速ギヤ列G3を介して、出力部材3に伝達され、1/iの回転数で出力される。
【0064】
3速段においては、第1噛合機構SM1が3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態となっているため、遊星歯車機構PGのサンギヤSaとキャリアCaとが同一回転となる。
【0065】
従って、遊星歯車機構PGの各回転要素が相対回転不能な状態となり、モータMGでサンギヤSaにブレーキをかければ減速回生となり、モータMGでサンギヤSaにトルクを伝達させれば、HEV走行を行うことができる。又、第1クラッチC1を開放して、モータMGのトルクのみで走行するEV走行も可能である。
【0066】
3速段において、動力制御装置ECUは、車両速度やアクセルペダルの開度等の車両情報に基づきダウンシフトが予測される場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結する2速側連結状態、又はこの状態に近付けるプリシフト状態とし、アップシフトが予測される場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結する4速側連結状態、又はこの状態に近付けるプリシフト状態とする。
【0067】
これにより、第2クラッチC2を締結させて伝達状態とし、第1クラッチC1を開放させて開放状態とするだけで、変速段の切換えを行うことができ、トルクが途切れることなく変速をスムーズに行うことができる。
【0068】
内燃機関ENGのトルクを用いて4速段を確立する場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結させた4速側連結状態とし、第2クラッチC2を締結させて伝達状態とする。
【0069】
4速段で走行中は、動力制御装置ECUが車両情報からダウンシフトを予測している場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態、又はこの状態に近付けるプリシフト状態とする。
【0070】
逆に、動力制御装置ECUが車両情報からアップシフトを予測している場合には、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態、又は、この状態に近付けるプリシフト状態とする。これにより、第1クラッチC1を締結させて伝達状態とし、第2クラッチC2を開放させて開放状態とするだけで、ダウンシフト又はアップシフトを行うことができ、トルクが途切れることなく変速をスムーズに行うことができる。
【0071】
4速段で走行中に減速回生又はHEV走行を行う場合には、動力伝達装置ECUがダウンシフトを予測しているときには、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態とし、モータMGでブレーキをかければ減速回生、トルクを伝達すればHEV走行を行うことができる。
【0072】
動力制御装置ECUがアップシフトを予測しているときには、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態とし、モータMGによりブレーキをかければ減速回生、モータMGからトルクを伝達させればHEV走行を行うことができる。
【0073】
内燃機関ENGのトルクを用いて5速段を確立する場合には、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態とする。5速段においては、第1クラッチC1が伝達状態とされることにより内燃機関ENGとモータMGとが直結された状態となるため、モータMGからトルクを出力すればHEV走行を行うことができ、モータMGでブレーキをかけ発電すれば減速回生を行うことができる。
【0074】
尚、5速段でEV走行を行う場合には、第1クラッチC1を開放状態とすればよい。又、5速段でのEV走行中に、第1クラッチC1を徐々に締結させることにより、内燃機関ENGの始動を行うこともできる。
【0075】
動力制御装置ECUは、5速段で走行中に車両情報から4速段へのダウンシフトが予測される場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結させた4速側連結状態、又はこの状態に近付けるプリシフト状態とする。これにより、4速段へのダウンシフトをトルクが途切れることなくスムーズに行うことができる。
【0076】
内燃機関ENGのトルクを用いて後進段を確立する場合には、第3噛合機構SM3をリバースギヤGRとリバース軸6とを連結した連結状態として、第2クラッチC2を締結させて伝達状態とする。これにより、エンジン出力軸2の回転数がマイナス回転(後進方向の回転)に変速されて、出力部材3から出力され、後進段が確立される。
【0077】
後進段において、減速回生又はHEV走行を行う場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態とし、ロック機構R1を開放状態とすることにより遊星歯車機構PGを各回転要素が相対回転不能な状態とする。そして、逆転している回転子MGbに、正転側のトルクを発生さてブレーキをかければ減速回生となり、逆転側のトルクを発生させれば、HEV走行を行うことができる。又、両クラッチC1,C2を開放状態とし、ロック機構R1を固定状態として、モータMGを逆転させることにより、EV走行による後進段を確立することもできる。
【0078】
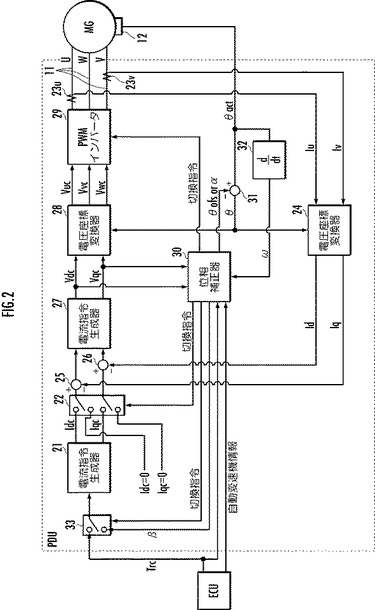
尚、図2に示すように、モータMGには、回転子MGbの磁極位置を検出する磁極位置検出器(磁極位置検出手段)12が組み付けられている。磁極位置検出器12は、例えば、磁気抵抗検出センサを周方向に複数設けたレゾルバのほか、ホール素子や光学式エンコーダを用いて構成された公知のものである。磁極位置検出器12は、回転子MGbの所定の基準回転位置からの磁極の回転角度θ(トルク軸の回転角度)の検出値を示す信号を磁極位置の検出信号として出力する。尚、磁極位置検出器12により得られる回転角度θの検出値(以下、磁極検出角θという)は、磁極位置検出器12の組付誤差や製造誤差等に起因して、一般には回転子MGbの実際の磁極位置(磁極の実際の回転角度θ act)に対して誤差が生じている。
【0079】
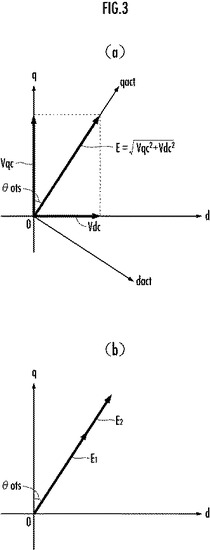
以下、本発明における学習処理の基本的な考え方を図3(a)及び図3(b)を参照して説明する。これらの図において、d−q座標は、dqベクトル制御の処理上のdq座標であり、回転子MGbの永久磁石による界磁極の磁束方向を界磁軸(d軸)とし、この界磁軸と直交する方向をトルク軸(q軸)としており、磁極位置検出器12(図2参照)により検出される磁極位置(以下、磁極検出位置という)により定まる。そして、dact−qact座標は、回転子MGbの実際の界磁方向を界磁軸とするdq座標(以下、実座標dact−qactという)である。
【0080】
ここで、モータMGの回転子MGbが回転しており、且つ、該モータMGの電機子電流I(電機子11の各相を流れる電流)が「0」になっている状態(以下、この状態を零電流状態という)に着目する。この零電流状態では、電機子印加電圧V(電機子11の各相の印加電圧)は、回転子MGbの界磁により発生する逆起電圧Eに等しくなる。この場合、磁極検出位置が真の磁極位置に対して誤差がなく、d−q座標は実座標dact−qactと一致する。このとき、dqベクトル制御の処理によって求められる界磁軸電圧指令値Vdc(界磁軸上の電圧指令値)はVdc=0となり、トルク軸電圧指令値Vqc(トルク軸上の電圧指令値)はVqc=Eとなる。
【0081】
従って、零電流状態でのdqベクトル制御の処理により求められる界磁軸電圧指令値Vdcが「0」となる状態では、磁極位置を正しく検出できる。このことは、磁極位置を正しく把握するためには、零電流状態で界磁軸電圧指令値Vdcが「0」となるように磁極検出位置を補正すればよいとことを意味している。
【0082】
又、零電流状態で、磁極検出位置が真の磁極位置に対して誤差があるとする。例えば図3(a)に示すように、d−q座標が実座標dact−qactに対して角度θofsの誤差を有するとする(以下、角度θofsを磁極位置誤差角θofsという)。このとき、dqベクトル制御の処理によって求められる界磁軸電圧指令値Vdc(界磁軸上の電圧指令値)はVdc≠0となり、トルク軸電圧指令値Vqc(トルク軸上の電圧指令値)はVqc≠Eとなる。そして、Vdcの2乗値と、Vqcの2乗値との和の平方根√(Vdc2 +Vqc2 )が逆起電圧Eの大きさに等しくなる。更に、この場合、界磁軸電圧指令値Vdcとトルク軸電圧指令値Vqcとの比(Vdc/Vqc)は、磁極位置誤差角θofsの正接tanθofsに等しくなる。すなわち、次式(1) が成立する。
θofs=tan−1 (Vdc/Vqc) … ( 1 )
【0083】
尚、逆起電圧Eの大きさ、ひいては界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの大きさ自体は、回転子MGbの回転速度ωに依存するが、式(1)は、零電流状態であれば回転子MGbの回転速度ωによらずに成立する。
【0084】
従って、零電流状態でdqベクトル制御の処理により求められる界磁軸電圧指令値Vdcとトルク軸電圧指令値Vqcとから、式(1)によって、磁極位置誤差角θofsを求めることができる。
【0085】
逆起電圧Eの大きさ、ひいては界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの大きさが大きい程、磁極位置誤差角θofsを高精度に求めることができる。そして、回転子MGbの回転速度ωが大きい程、逆起電圧Eは大きくなる。例えば図3(b)に示すように、逆起電圧E1を発生するため回転子MGbの回転速度ωは、逆起電圧E2を発生するため回転子MGbの回転速度ωよりも大きい。従って、磁極位置誤差角θofsを求める場合、回転子MGbの回転速度ωを大きくすることが好ましい。
【0086】
磁極位置誤差角θofsだけ、磁極検出位置を補正すれば、正しい磁極位置を把握できる。例えば、磁極検出位置に対応する磁極の回転角度位置をθとすれば、その回転角度θ から磁極位置誤差角θofsを減算した角度θ−θofsが、正しい磁極位置を表すものとなる。尚、以上説明した原理は、回転子MGbの磁石が円筒形であるか突極形であるかによらずに成立する。
【0087】
次に、モータ制御装置PDUについて、図2を参照して、説明する。
【0088】
モータ制御装置PDUは、dqベクトル制御によってモータMGの運転制御を行うものであり、モータMGに発生させるトルクの指令値であるトルク指令値Trc又は回転合わせトルク指令値βに応じて、界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを求める電流指令生成器21と、この電流指令生成器21が出力する界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(Idc,Iqc)と値「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(0,0)とを選択的に出力する電流指令切換器22とを備えている。
【0089】
電流指令生成器21に入力されるトルク指令値Trcは、動力制御装置ECUによって車両の運転状態(アクセル操作量等)に応じて設定される。そして、電流指令生成器21は、入力されたトルク指令値Trcからテーブルを参照してモータMGに発生させるために要する界磁軸電流及びトルク軸電流を求め、それらを界磁軸電流指令値Idc及びトルク軸電流指令値Iqcとして出力する。又、電流指令切換器22は、その出力を後述する位相補正器30からの切換指令に応じて切換える。
【0090】
又、モータ制御装置PDUは、モータMGの電機子11のU相、V相を流れる電機子電流Iu,Ivをそれぞれ検出する電機子電流検出器23u,23vと、その電機子電流Iu,Ivの検出値を座標変換することによってd−q座標での界磁軸電流Id及びトルク軸電流Iqを算出する電流座標変換器24とを備えている。ここで、電機子11は3相であるため、2相を流れる電流を検出すれば他の1相を流れる電流は算出できる。例えばW相を流れる電流は、−(Iu+Iv)となる。このため、本実施形態では電機子電流検出器23u,23vは2つの相(本実施形態ではU相、V相)の電流を検出する。又、電流座標変換器24は、回転子MGbの磁極の回転角度を示す磁極回転角θを用いて、次式(2)により座標変換を行う。
【0091】
【数1】

【0092】
この座標変換により求められるId及びIqは、磁極回転角θにより定まるd−q座標(θをトルク軸の回転位置として定まるdq座標)でのトルク軸電流の検出値及び界磁軸電流の検出値としての意味を有する。以下、Id、Iqをそれぞれ界磁軸検出電流Id,トルク軸検出電流Iqという。
【0093】
又、モータ制御装置PDUは、電流指令切換器22から出力される界磁軸電流指令値Idと電流座標変換器24により求められる界磁軸検出電流Idの偏差、並びに、電流指令切換器22から出力されるトルク軸電流指令値Iqcと電流座標変換器24により求められるトルク軸検出電流Iqとの偏差をそれぞれ求める減算処理器25,26と、これらの偏差(Idc−Id),(Iqc−Iq)に応じてd−q座標での各軸方向の印加電圧の指令値である界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める電圧指令生成器27と、その界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを座標変換することによって電機子11の各相の印加電圧の指令値Vuc,Vvc,Vwc(以下、相電圧指令値Vuc,Vvc,Vwcという)を算出する電圧座標変換器28と、該相電圧指令値Vuc,Vvc,Vwcに従って電機子11に印加する三相交流電圧をPWM(Pulse Width Modulation)制御するPWMインバータ回路29(モータドライブ回路)とを備えている。
【0094】
電圧指令生成器27は、基本的には、前記偏差(Idc−Id),(Iqc−Iq)がそれぞれ「0」に近似するようにPI制御則等のフィードバック制御則に基づいて界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める。尚、この種の電圧指令生成器27は、公知のものであるので詳細な説明は省略するが、電圧指令生成器27は、フィードバック制御則の処理に加えて、界磁軸、トルク軸軸間での速度起電力の干渉を補償するための非干渉制御の処理を行うことにより、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める。
【0095】
電圧座標変換器28は、電流座標変換器24の座標変換で使用した磁極回転角θを用いて、次式(3)により座標変換を行う
【0096】
【数2】
【0097】
この座標変換により求められる相電圧指令値Vuc,Vvc,Vwcは、電機子11の各相U,V,Wの印加電圧の大きさ及び位相を規定するものであり、PWMインバータ回路29は、相電圧指令値Vuc,Vvc,Vwcに従って電機子11の各相U,V,Wに交流電圧を印加する。
【0098】
又、PWMインバータ回路29は、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの2以上の整数倍の周波数の電圧値を当該界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcにそれぞれ選択的に加えることが可能な高調波重畳機能を有している。この高調波重畳機能の実行の有無は、後述する位相補正器30の指令に応じて切換えられる。
【0099】
モータ制御装置PDUは、更に、磁極位置検出器12による磁極検出角θの、実際の磁極の回転角度θactからの誤差角を表す磁極位置誤差角θofsを求めて出力する位相補正器30と、この位相補正器30から出力される磁極位置誤差角θofs(以下、磁極補正角θofsという)を磁極位置検出器12による磁極検出角θから減算することにより、電流座標変換器24及び電圧座標変換器28の座標変換で用いる磁極回転角θact(=θ−θofs)を求める減算処理器31と、磁極検出角θを微分することによりモータMGの回転子MGbの回転速度(詳しくは回転角速度)ω=dθ/dtを求める速度算出器32とを備えている。
【0100】
尚、回転速度ωは、適宜の速度センサを用いて検出するようにしてもよい。或いは、図示しない回転速度センサにより検出される第1入力軸4(図1参照)の回転速度Neを上記回転速度ωの代わりに用いてもよい。
【0101】
位相補正器30は、本発明における補正量決定手段に相当し、本発明の磁極位置補正量に相当する磁極補正量(位相補正量)θofsを求める学習処理を行う。学習処理の詳細は後述するが、位相補正器30は、所定の条件下で磁極補正角θofsを求めて記憶保持し、該所定の条件下以外のモータMGの通常的な運転時には、記憶保持している磁極補正角θofsを出力する。
【0102】
そして、位相補正器30には、学習処理を行うために、トルク指令Trcが入力されると共に、電圧指令生成器21から界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの算出値が入力され、速度算出器32から回転角速度ωの算出値が入力される。
【0103】
位相補正器30には、自動変速機1の状態を表す自動変速機情報(例えば、各クラッチC1〜C3及び各噛合機構SM1,SM2の状態、及び第1主入力軸4の回転速度Neなど)が動力制御装置ECUを介して入力される。又、位相補正器30は、学習処理を実行しているときに、電流指令切換器22から値「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(0,0)を出力させるための切換指令を電流指令切換器22に出力する。
【0104】
又、位相補正器30は、回転合わせトルク指令値βをトルク指令切換器33に対して出力する。そして、トルク指令切換器33は、動力制御装置ECUからトルク指令値Trcも入力され、位相補正器30からの切換指令に応じて、トルク指令値Trc又は回転合わせトルク指令値βを出力する。
【0105】
尚、以上説明したモータ制御装置PDUにおいて、電流指令生成器21、電流指令切換器22、減算処理器25,26,19、電圧指令生成器27、電流座標変換器24、電圧座標変換器28、位相補正器30、速度算出器32は、本実施形態では所定のプログラムが実装されたマイクロコンピュータ(入出力回路を含む)の機能的手段として構成されている。
【0106】
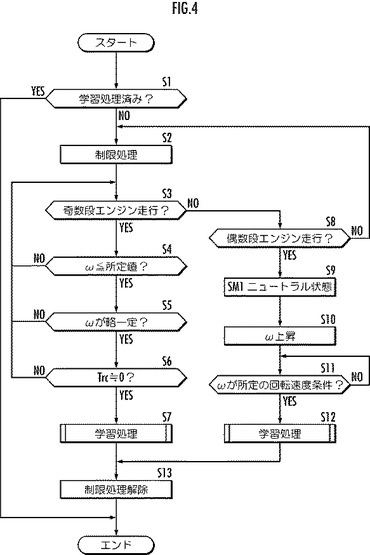
次に、動力制御装置ECU及びモータ制御装置PDUの処理について、図4を参照して、説明する。
【0107】
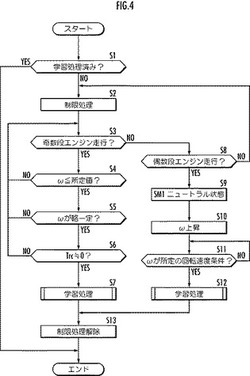
磁極位置検出器12の修理、交換等によって、学習処理が行われていない場合(S1:NO)、磁極位置検出器12の組付誤差や製造誤差等に起因して、磁極位置検出器12により検出される磁極位置は実際の磁極位置に対して誤差がある。そこで、この場合、以下のような制限処理を行う(S2)。
【0108】
EV走行を行うと、トルク指令値Trcに対してモータMGから実際に出力されるトルクは精度が劣るので、車両の走行が不安定となる。そこで、学習処理が終わるまで、動力制御装置ECUはEV走行を禁止する。
【0109】
又、磁極位置検出器12により検出された磁極位置をそのまま用いると、電機子電圧の位相が実際の位相に対して誤差が生じるので、PWMインバータ回路29で高調波重畳機能を実行すると、電機子電圧が共振するおそれがある。そこで、位相補正器30はPWMインバータ回路29に高調波重畳機能を実行しない旨の指令を出力する。
【0110】
又、モータMGが必要なトルクを精度良く出力することができないので、モータMGのトルクを用いて発生させる第1クラッチC1の係合トルクの精度が悪化するため、内燃機関ENGの始動を確実に行うことができない。そこで、動力制御装置ECUは、スタータSTを用いて内燃機関ENGの始動を行う。
【0111】
尚、車両がスタータSTを備えない場合、モータ制御装置PDUは、内燃機関ENGの始動を行う際の所定のトルク指令値Trc(第2のトルク指令値)を、学習処理後の内燃機関ENGの始動を行う際の所定のトルク指令値Trc(第1のトルク指令値)よりも高い値に設定する。これにより、モータMGの力率や効率の低下を補うことができ、内燃機関ENGの始動を確実となる。
【0112】
又、モータMGの力率や効率が低下しているので、エアコンディショナが安定的に作動しない。そこで、動力制御装置ECUは、クラッチC3を伝達遮断状態として、エアコンディショナ用コンプレッサA/Cが駆動することを禁止する。
【0113】
そして、学習処理が行われていない場合(S1:NO)、車両が奇数段でエンジン走行しているか否かを判断する(S3)。具体的には、内燃機関ENGが駆動し、自動変速機1で奇数段が確立され、且つ第1クラッチC1が伝達状態であるか否かを判断する。
【0114】
S3の判断結果でYESである場合には、モータMGの回転速度ω、ひいては第1入力軸4の回転速度Neが所定値以下(例えば2000rpm)であるか否かを判断する(S4)。
【0115】
S3の判断結果でYESである場合には、モータMGの回転速度ωが略一定であるか否かを判断する(S5)。具体的には、速度算出器32により求められるモータMGの回転速度ωの経時的な変動幅が所定時間以上、所定幅であるか否かにより判断する。
【0116】
S5の判断結果がYESである場合には、トルク指令値Trcが略「0」であるか否かを判断する(S6)。この判断は、トルク指令値Trcが「0」近傍の所定範囲内にあるか否かにより判断する。
【0117】
S6の判断結果がYESである場合には、S7の学習処理を実行して磁極補正角θofsを求める。S7の学習処理については、後述する。尚、S2〜S6の判断結果が全てYESである状態が、本発明における第1の走行状態に相当する。
【0118】
一方、S3の判断結果でNOである場合には、車両が偶数段でエンジン走行しているか否かを判断する(S8)。具体的には、内燃機関ENGが駆動し、自動変速機1で偶数段が確立され、且つ第1クラッチC2が伝達状態であるか否かを判断する。S8の判断結果でNOである場合には、S2に戻る。尚、S8の判断結果がYESである状態が、本発明における第2の走行状態に相当する。
【0119】
S8の判断結果でYESである場合には、まず、プレシフトにより第1噛合機構SM1が連結状態の場合には、連結状態を解除してニュートラル状態とする(S9)。これにより、モータMGから出力されるトルクが出力軸3aに伝達されなくなる。
【0120】
そして、モータMGがトルクを出力し、回転速度ωが上昇するように、モータ制御装置PDUに対してトルク指令Trcを出力する(S10)。そして、モータMGの回転速度ωが所定の回転速度条件を満たすか否かを判断する(S11)。ここで、所定の回転速度条件とは、回転速度ωが予め定められた所定範囲内にあり、且つ、回転変動が規定回転変動以下にあることである。例えば、高速回転であり、モータMGの逆起電力が大きい場合、或いは、学習中に回転が停止するような極めて低速回転の場合は回避される。S11の判断結果がNOの場合には、回転速度条件を満たすまでS11の判断を繰り返す。
【0121】
S11の判断結果がYESの場合には、S12の学習処理を実行して磁極補正角θofsを求める。尚、S12の学習処理については、後述する。S12の学習処理中は、変速段を維持したままエンジン走行を続行する。変速段やエンジン走行を維持できない場合には、S12の学習処理を中止し、S2に戻る。
【0122】
S7又はS12の学習処理の後、前記制限処理を解除する(S13)。具体的には、EV走行が許可され、位相補正器30はPWMインバータ回路29に高調波重畳機能を実行する旨の指令を出力し、内燃機関ENGの始動はモータMGのトルクを用いて行い、エアコンディショナの作動が許可される。
【0123】
以下、図5を参照して、S7の学習処理について説明する。このS7の学習処理は、本発明の第1の学習処理に相当する。
【0124】
まず、位相補正器30は、値が共に「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを電流指令切換器22に出力させる切換指令を該電流指令切換器22に与える(S21)。更に、位相補正器30は、仮設定補正角αを「0」として、これを磁極補正角θofsの代わりに出力する(S22)。
【0125】
この場合、減算処理器31で求められる磁極回転角θは、θ−α=θとなる。従って、磁極位置検出器12による磁極検出角θがそのまま、電流座標変換器24及び電圧座標変換器28の座標変換で用いる磁極回転角θとして、それらの変換器24,16に入力される。そして、この状態で、モータ制御装置PDUは、界磁軸検出電流Id及びトルク軸検出電流Iqをそれらの指令値である「0」に合致させるように相電圧指令値Vuc,Vvc,Vwcを求めて、モータMGの電機子の印加電圧を操作する。この結果、モータMGの実際の電機子電流(U,V,Wの各相を流れる電流)が略「0」に制御される。
【0126】
S22の処理を実行した後、位相補正器30は所定時間待機し(S23)、後述するS24の処理を実行する。ここで、上記所定時間は、S22の処理を実行してから、モータMGの実際の電機子電流が十分に「0」近傍に収束するまでに必要十分な時間として予め定められた時間であり、例えば0.5秒である。尚、S23で所定時間待機する代わりに、電機子電流検出器23u,23vにより検出される電機子電流を監視し、それらが「0 」近傍の所定の範囲内に収まったときに、S24の処理を実行してもよい。
【0127】
S23にて、モータMGは零電流状態となる。このとき、モータ制御装置PDUのdqベクトル制御の処理上で認識されている磁極の回転角度(図3(a)のトルク軸の回転角度位置)、すなわち、磁極回転角θは、磁極位置検出器12による磁極検出角θであるので、該磁極検出角θの、実際の磁極位置の回転角θactに対する誤差角は、式(1)により表される。そこで、位相補正器30は、電圧指令生成器27が求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて式(1)の右辺の演算を行い、その演算により求めた値を新たに磁極補正角θofsとして求める(S24)。
【0128】
位相補正器30は、この求めた磁極補正角θofsを記憶保持し(S25)、S7の学習処理を終了する。
【0129】
以下、図6を参照して、S12の学習処理について説明する。
【0130】
モータMGが停止するときのモータMGの回転速度ωは「0」でアイドル状態である。この状態から、モータ制御装置PDUは、モータMGの回転速度ωが上昇するように、モータ制御装置PDUに対してトルク指令Trcを出力する。これにより、モータMGの回転速度ωは徐々に上昇し、例えば、1200rpmまで上昇する(S31)。
【0131】
その後、位相補正器30は、値が共に「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを電流指令切換器22に出力させる切換指令を該電流指令切換器22に出力する(S32)。そして、この状態で、位相補正器30は仮設回転合わせトルク指令値βを「0」として、これをトルク指令値としてトルク指令切換器33を介して電流指令生成器21に出力する(S33)。
【0132】
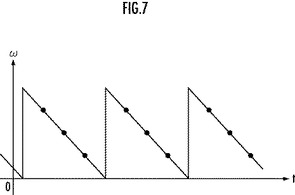
S32の処理を実行した後、位相補正器30は所定時間待機する(S34)。これにより、モータMGの慣性による回転速度ωの上昇中に学習処理が行われることが回避される。図7に示すように、回転速度ωが上昇したモータMGは、回転子MGbの慣性により回転し続けるが、回転速度ωが機械損失により徐々に低下する。
【0133】
そして、位相補正器30は、電圧指令生成器27が求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて式(1)の右辺の演算を行い、その演算により求めた値を新たに磁極補正角θofsとして求める(S35)。位相補正器30は、この回転速度ωが低下する期間に、式(1)からtan−1(Vdc/Vqc)として磁極補正量θofsを求める(S35)。これにより、界磁軸電圧指令値Vdcが「0」に設定され、トルク軸電圧指令値Vqcは、電機子11の逆起電力Eに相当する電圧となる。
【0134】
尚、回転速度ωが「0」となるまでに、電圧指令生成器27は界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの組を、図7に点で示す各時点で複数求め得るが、上述したように回転速度ωが大きい程、磁極位置誤差角θofsを高精度に求めることができる。そこで、所定時間待機した(S34)後、電圧指令生成器27が最初に求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて位相補正器30が求めた値を新たに磁極補正角θofsとして求めることが好ましい(S35)。
【0135】
以上のように、本実施形態によれば、車両が奇数段で走行している場合であっても、偶数段で走行している場合であっても、走行に影響を及ぼすことなく、自動変速機1に状態に応じた適切な学習処理によって高精度の磁極補正角θofsを早急に求めることができる。
【0136】
尚、本発明に係るハイブリッド車両は、上述したハイブリッド車両に限定されない。特に、自動変速機は、上述した自動変速機1に限定されず、第1断接手段を介して選択的に内燃機関ENGのトルクが伝達され、電機子MGbに接続された第1入力軸、第2断接手段を介して選択的に内燃機関ENGのトルクが伝達される第2入力軸、第1入力軸と出力軸を選択的に連結する第1選択手段、及び第2入力軸と出力軸を選択的に連結する第2選択手段を有し、内燃機関ENG及びモータMGから出力される動力を変速して出力軸に伝達するものであればよい。
【0137】
又、本実施形態では、S7の学習処理に用いる仮設定補正角αを「0」にしたが、他の値、例えば磁極補正角θofsの現在値を仮設定補正角αとして用いてもよい。この場合には、S24において、式(1)の右辺の演算により求められる値を、磁極補正角θofsの現在値に加算することで、新たな磁極補正角θofsを求めるようにすればよい。
【0138】
又、本実施形態では、S24において、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて磁極補正角θofsを演算で求めたが、仮設定補正角αを複数種類の値に設定し、探索的に磁極補正角θofsを求めてもよい。更に詳細には、仮設定補正角αの初期値を例えば「0」として、これを磁極補正角θofsの代わりに出力した後、モータMGの実際の電機子電流が十分に「0」近傍に収束するまで待機する。次いで、電圧指令生成器27が求めた界磁軸電圧指令値Vdcが略「0」であるか否かを判断する。この判断結果がYESである場合には、現在出力している仮設定補正角αを磁極検出角θから減算してなる磁極回転角θが、回転子MGbの実際の磁極の回転角と略一致する。従って、この場合には、現在出力している仮設定補正角αを磁極補正角θofsとして求め、この磁極補正角θofsを記憶保持する。
【0139】
一方、前記判断結果がNOである場合には、現在出力している仮設定補正角αを磁極検出角θから減算してなる磁極回転角θが、回転子MGbの実際の磁極の回転角と一致しない(図3(a)の状態になっている)。そして、この場合には、仮設定補正角αを、その現在値に予め定めた微小な所定量Δαだけ増加させた値に更新して処理を繰り返す。
【0140】
このようにして、界磁軸電圧指令値Vdcが略「0」になるまで、仮設定補正角αの値が所定量Δαずつ変化され、界磁軸電圧指令値Vdcが略「0」となるような仮設定補正角αが探索される。そして、その探索された仮設定補正角αの値が、最終的に磁極補正角θofsとして求められ、記憶保持される。
【符号の説明】
【0141】
1…自動変速機、 3a…出力軸、 4…第1入力軸、 5…第2入力軸、 11…電機子、 12…磁極位置検出器(磁極位置検出手段)、 21…電流指令生成器、 22…電流指令切換器、 23u,23v…電機子電流検出器、 24…電流座標変換器、 27…電圧指令生成器、 28…電圧座標変換器、 29…PWMインバータ回路(電流制御手段)、 30…位相補正器(補正量決定手段)、 32…速度算出器、 A/C…エアコンディショナ用コンプレッサ、 C1…第1クラッチ(第1断接手段)、 C2…第2クラッチ(第2断接手段)、 ECU…動力制御装置(始動時トルク設定手段)、 ENG…内燃機関、 MG…モータ(回転電機)、 MGa…固定子、 MGb…回転子、 PDU…モータ制御装置、 SM1…第1噛合機構(第1選択手段)、 SM2…第2噛合機構(第2選択手段)、 ST…スタータ(電動機)。
【技術分野】
【0001】
本発明は、内燃機関、回転電機及び自動変速機を備えるハイブリッド車両に関する。
【背景技術】
【0002】
内燃機関及び/又は回転電機のトルクにより走行するハイブリッド車両においては、回転電機の回転子の磁極位置をレゾルバ等の磁極位置検出器によって検出し、電機子に印加される三相交流電圧の位相を磁極位置に応じて制御するように構成されている。
磁極位置検出器の組付誤差や製造誤差等によって、検出される磁極位置は実際の磁極位置に対して誤差がある。そこで、電機子に流れる電流(固定子電流)が「0」の状態で界磁軸電圧指令値が「0」になるように磁極位置補正量を求める学習処理を行う必要がある。
【0003】
特許文献1には、内燃機関の出力軸と連動して回転子が回転するように構成されたハイブリッド車両における学習処理が開示されている。又、特許文献2には、内燃機関の出力軸と回転子がクラッチを介して接続されるように構成されたハイブリッド車両における学習処理が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3688673号公報
【特許文献2】特開2008−72858号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ハイブリッド車両には、第1断接手段を介して選択的に内燃機関のトルクが伝達され、回転子に接続された第1入力軸、第2断接手段を介して選択的に内燃機関のトルクが伝達される第2入力軸、第1入力軸と出力軸を選択的に連結する第1選択手段、及び第2入力軸と出力軸を選択的に連結する第2選択手段を有し、内燃機関及び回転電機から出力される動力を変速して出力軸に伝達する自動変速機を介して、内燃機関と回転電機とが接続されて構成されたものがある。
【0006】
このようなハイブリッド車両の場合には、前記特許文献1又は2に開示された学習処理を走行中に行うと、予期しないトルクが出力軸に伝達され、走行に悪影響を及ぼすおそれがある。
【0007】
本発明は、走行に悪影響を及ぼすことなく、磁極位置補正量を求める学習処理を行う行うことが可能なハイブリッド車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のハイブリッド車両は、内燃機関と、回転子及び固定子にそれぞれ永久磁石及び電機子を設けた永久磁石式回転電機と、第1断接手段を介して選択的に前記内燃機関のトルクが伝達され、前記回転子に接続された第1入力軸、第2断接手段を介して選択的に前記内燃機関のトルクが伝達される第2入力軸、前記第1入力軸と出力軸を選択的に連結する第1選択手段、及び前記第2入力軸と出力軸を選択的に連結する第2選択手段を有し、前記内燃機関及び前記回転電機から出力される動力を変速して前記出力軸に伝達する自動変速機と、前記回転子の磁極位置を検出する磁極位置検出手段と、該磁極位置検出手段により検出される磁極位置を補正するための磁極位置補正量を求める補正量決定手段と、前記磁極位置検出手段により検出された磁極位置を前記補正量決定手段により求められた磁極位置補正量で補正してなる磁極位置に応じて前記電機子に印加する電機子電圧の位相を操作しつつ、該電機子に流れる電機子電流を制御する電流制御手段とを備え、前記補正量決定手段は、前記内燃機関が駆動し、前記第1断接手段が接続状態であり、且つ前記第1選択手段により前記第1入力軸と出力軸とが選択的に連結されて、当該車両が走行する第1の走行状態では、前記磁極位置補正量を第1の学習処理により求め、前記内燃機関が駆動し、前記第2断接手段が接続状態であり、且つ前記第2選択手段により前記第2入力軸と出力軸とが選択的に連結されて、当該車両が走行する第2の走行状態では、前記磁極位置補正量を第2の学習処理により求めることを特徴とする。
【0009】
本発明のハイブリッド車両によれば、第1の走行状態では第1の学習処理により磁極位置補正量を求め、第2の走行状態では第2の学習処理により磁極位置補正量を求める。そのため、第1及び第2の走行状態において、それぞれ磁極位置補正量を求めるために必要となるトルクが出力軸に伝達されないように、第1及び第2の学習処理を適切なものとすることにより、予期しないトルクが出力軸に伝達されることを防止可能となる。
【0010】
更に、第1及び第2の何れの走行状態においても学習処理を行うことが可能であるので、適切な磁極位置補正量を用いて電流制御手段が電機子電流を制御する正常な状態に早急に移行できる。
【0011】
本発明のハイブリッド車両において、前記第1の学習処理は、前記回転子が回転している状態で、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記磁極位置補正量を所定の仮設定値に定めて該ベクトル制御の処理を実行し、該ベクトル制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることが好ましい。
【0012】
この場合、内燃機関の駆動により第1断接手段を介して回転する第1入力軸に接続された回転子が回転している状態で、磁極位置補正量を求める第1の学習処理が行われ、高精度の磁極位置補正量を求めることができる。そして、この第1の学習処理は界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持して行われるので、回転電機はトルクを出力せず、第1の学習処理中に予期しないトルクが出力軸に伝達されない。
【0013】
又、本発明のハイブリッド車両において、前記第2の学習処理は、前記第1選択手段を連結解除状態にして、前記回転電機を駆動させて前記回転子の回転速度を一旦上昇させた後、前記回転子の回転速度の下降中に、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記回転電機を取扱うトルク制御におけるトルク指令値を所定の仮設定値に定めて該トルク制御の処理を実行し、該トルク制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることが好ましい。
【0014】
この場合、第1選択手段が連結解除状態であり、回転子が接続された第1入力軸と出力軸との接続が遮断されているので、回転電機を駆動させて回転子の回転速度を上昇させても、この回転電機からのトルクが出力軸に伝達されない。そのため、第2の学習処理中に予期しないトルクが出力軸に伝達されない。そして、回転子の回転速度を上昇させるので、この第2の学習処理によって高精度の磁極位置補正量を求めることができる。
【0015】
尚、学習処理を行い適切な磁極位置補正量を求めるまで、電流制御手段は磁極位置に応じて電機子に印加する電機子電圧の位相を適切に操作できないので、回転電機は必要なトルクを精度良く出力することができない。
【0016】
このような場合、回転電機のトルクのみにより当該車両を走行させると、走行が不安定となる。そこで、本発明のハイブリッド車両において、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記回転電機のトルクのみによる当該車両の走行を禁止することが好ましい。
【0017】
又、電流制御手段が電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を電機子に印加すると、電機子電圧が共振するおそれがある。そこで、本発明のハイブリッド車両において、前記電流制御手段は、前記補正量決定手段により前記磁極位置補正量を求めた後、前記電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を前記電機子に印加するように制御することが好ましい。
【0018】
又、回転電機が必要なトルクを精度良く出力することができないので、回転電機のトルクを用いて発生させる断接手段の接続トルクの精度が悪化し、内燃機関の始動を確実に行うことができないおそれがある。そこで、本発明のハイブリッド車両において、前記内燃機関に接続される電動機を備え、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記電動機を駆動させて前記内燃機関を始動させることが好ましい。
【0019】
尚、車両が前記電動機を備えない場合、本発明のハイブリッド車両において、前記内燃機関の始動時に前記回転電機を取扱うトルク制御におけるトルク指令値を設定する始動時トルク指令値設定手段を備え、該始動時トルク指令値設定手段は、前記補正量決定手段により前記磁極位置補正量を求めるまで、第1のトルク指令値を設定し、前記補正量決定手段により前記磁極位置補正量を求めた後、前記第1のトルク指令値より高い第2のトルク指令値を設定することが好ましい。これにより、回転電機の力率や効率の低下を補うことができ、内燃機関を確実に始動させることが可能となる。
【0020】
又、回転電機の力率や効率が低下しているので、エアコンディショナが安定的に作動しない。そこで、本発明のハイブリッド車両において、第3断接手段を介して選択的に前記第1入力軸に接続されるエアコンディショナ用コンプレッサを備え、前記補正量決定手段により前記磁極位置補正量を求めるまで、前記第3断接手段を伝達状態にすることを禁止することが好ましい。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係るハイブリッド車両を示す説明図。
【図2】モータ制御装置の構成示すブロック図。
【図3】学習処理の原理を説明するための図。
【図4】動力制御装置及びモータ制御装置での処理を示すフローチャート。
【図5】図4のS7の学習処理を示すフローチャート。
【図6】図4のS12の学習処理を示すフローチャート。
【図7】図4のS12の学習処理を説明するための図。
【発明を実施するための形態】
【0022】
本発明の実施形態に係るハイブリッド車両について図面を参照して説明する。
【0023】
図1に示すように、ハイブリッド車両は、エンジンからなる内燃機関ENG、永久磁石式回転電機であるモータMG、モータMGと電力を授受する二次電池からなる蓄電装置BATT、自動変速機1、内燃機関ENGを始動可能な電動機からなるスタータST、及び内燃機関ENG、モータMG、自動変速機1、スタータSTの各部を制御する動力制御装置ECU(Electronic Control Unit)を備える。
【0024】
自動変速機1は、内燃機関ENGのトルク(駆動力)が伝達されるエンジン出力軸2と、図外のディファレンシャルギヤを介して駆動輪としての左右の前輪にトルクを出力する出力ギヤからなる出力部材3と、変速比の異なる複数のギヤ列G2〜G5とを備える。
【0025】
又、自動変速機1は、変速比順位で奇数番目の各変速段を確立する奇数番ギヤ列G3,G5の駆動ギヤG3a,G5aを回転自在に軸支する第1入力軸4と、変速比順位で偶数番目の変速段を確立する偶数番ギヤ列G2,G4の駆動ギヤG2a,G4aを回転自在に軸支する第2入力軸5と、リバースギヤGRを回転自在に軸支するリバース軸6を備える。尚、第1入力軸4はエンジン出力軸2と同一軸線上に配置され、第2入力軸5及びリバース軸6は第1入力軸4と平行に配置されている。
【0026】
又、自動変速機1は、第1入力軸4に回転自在に軸支されたアイドル駆動ギヤGiaと、アイドル軸7に固定されアイドル駆動ギヤGiaに噛合する第1アイドル従動ギヤGibと、第2入力軸5に固定された第2アイドル従動ギヤGicと、リバース軸6に固定され第1アイドル駆動ギヤGibに噛合する第3アイドル従動ギヤGidとで構成されるアイドルギヤ列Giを備える。尚、アイドル軸7は第1入力軸4と平行に配置されている。
【0027】
自動変速機1は、油圧作動型の乾式摩擦クラッチ又は湿式摩擦クラッチからなる第1クラッチC1及び第2クラッチC2を備える。第1クラッチC1は、エンジン出力軸2に伝達された内燃機関ENGのトルクを第1入力軸4に伝達させる伝達状態と、この伝達を断つ開放状態とに切換自在に構成されている。第2クラッチC2は、エンジン出力軸2に伝達された内燃機関ENGのトルクを第2入力軸5に伝達させる伝達状態と、この伝達を断つ開放状態とに切換自在に構成されている。第2クラッチC2を締結させて伝達状態とすると、エンジン出力軸2は第1アイドル駆動ギヤGib及び第2アイドル駆動ギヤGicを介して第2入力軸5に連結される。
【0028】
両クラッチC1,C2は、素早く状態が切換えられるように電気式アクチュエータにより作動されるものであることが好ましい。尚、両クラッチC1,C2は、油圧式アクチュエータにより作動されるものであってもよい。
【0029】
又、自動変速機1には、エンジン出力軸2と同軸上に位置させて、差動回転機構である遊星歯車機構PGが配置されている。遊星歯車機構PGは、サンギヤSaと、リングギヤRaと、サンギヤSa及びリングギヤRaに噛合するピニオンPaを自転及び公転自在に軸支するキャリアCaとからなるシングルピニオン型で構成される。
【0030】
遊星歯車機構PGのサンギヤSa、キャリアCa、リングギヤRaからなる3つの回転要素を、速度線図(各回転要素の相対的な回転速度を直線で表すことができる図)におけるギヤ比に対応する間隔での並び順にサンギヤSa側から夫々第1回転要素、第2回転要素、第3回転要素とすると、第1回転要素はサンギヤSa、第2回転要素はキャリアCa、第3回転要素はリングギヤRaとなる。
【0031】
そして、遊星歯車機構PGのギヤ比(リングギヤRaの歯数/サンギヤSaの歯数)をgとして、第1回転要素たるサンギヤSaと第2回転要素たるキャリアCaの間の間隔と、第2回転要素たるキャリアCaと第3回転要素たるリングギヤRaの間の間隔との比が、g:1となる。
【0032】
第1回転要素たるサンギヤSaは、第1入力軸4に固定されている。第2回転要素たるキャリアCaは、3速ギヤ列G3の3速駆動ギヤG3aに連結されている。第3回転要素たるリングギヤRaは、ロック機構R1により変速機ケース等の不動部に解除自在に固定される。
【0033】
ロック機構R1は、リングギヤRaが不動部に固定される固定状態、又はリングギヤRaが回転自在な開放状態の何れかの状態に切換自在なシンクロメッシュ機構で構成されている。
【0034】
尚、ロック機構R1は、シンクロメッシュ機構に限らず、スリーブ等による摩擦係合解除機構のほか、湿式多板ブレーキ、ハブブレーキ、バンドブレーキ等のブレーキや、ワンウェイクラッチ、2ウェイクラッチなどで構成してもよい。又、遊星歯車機構PGは、サンギヤと、リングギヤと、互いに噛合し一方がサンギヤ、他方がリングギヤに噛合する一対のピニオンPa、Pa’を自転及び公転自在に軸支するキャリアとからなるダブルピニオン型で構成してもよい。この場合、例えば、サンギヤ(第1回転要素)を第1入力軸4に固定し、リングギヤ(第2回転要素)を3速ギヤ列G3の3速駆動ギヤG3aに連結し、キャリア(第3回転要素)をロック機構R1で不動部に解除自在に固定するように構成すればよい。
【0035】
遊星歯車機構PGの径方向外方には、中空のモータMG(モータ・ジェネレータ)が配置されている。換言すれば、遊星歯車機構PGは、中空のモータMGの内方に配置されている。
【0036】
モータMGは、本実施形態では3相DCブラシレスモータであり、3相(U相、V相、W相)の巻き線から成る電機子(コイル)11(図2参照)を設けた固定子(ステータ)MGaと、永久磁石が設けられた回転子(ロータ)MGbを備えている。永久磁石は、円筒形のものでも、突極形のものであってもよい。
【0037】
又、モータMGは、動力制御装置ECUの指示信号に基づき、モータ制御装置(パワードライブユニット)PDUを介して制御される。動力制御装置ECUは、モータ制御装置PDUを、蓄電装置BATTの電力を消費してモータMGを駆動させる駆動状態と、回転子MGbの回転力を抑制させて発電し、発電した電力をモータ制御装置PDUを介して蓄電装置BATTに充電する回生状態とに適宜切換える。
【0038】
出力部材3を軸支する出力軸3aには、2速駆動ギヤG2a及び3速駆動ギヤG3aに噛合する第1従動ギヤGo1が固定されている。出力軸3aには、4速駆動ギヤG4a及び5速駆動ギヤG5aに噛合する第2従動ギヤGo2が固定されている。又、出力軸3aには、パーキングギヤGPが固定されている。
【0039】
このように、2速ギヤ列G2と3速ギヤ列G3の従動ギヤ、及び4速ギヤ列G4と5速ギヤ列G5の従動ギヤとを夫々1つのギヤGo1,Go2で構成することにより、自動変速機の軸長を短くすることができ、FF(前輪駆動)方式の車両への搭載性を向上させることができる。
【0040】
第1入力軸4には、シンクロメッシュ機構で構成され、3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態、5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態、3速駆動ギヤG3a及び5速駆動ギヤG5aと第1入力軸4との連結を断つニュートラル状態の何れかの状態に切換選択自在な第1選択手段である第1噛合機構SM1が設けられている。
【0041】
第2入力軸5には、シンクロメッシュ機構で構成され、2速駆動ギヤG2aと第2入力軸5とを連結した2速側連結状態、4速駆動ギヤG5aと第2入力軸5とを連結した4速側連結状態、2速駆動ギヤG2a及び4速駆動ギヤG5aと第2入力軸5との連結を断つニュートラル状態の何れかの状態に切換選択自在な第2選択手段である第2噛合機構SM2が設けられている。
【0042】
又、第1入力軸4には、リバースギヤGRに噛合するリバース従動ギヤGRaが固定されている。
【0043】
リバース軸6には、シンクロメッシュ機構で構成され、リバースギヤGRとリバース軸6とを連結した連結状態と、この連結を断つニュートラル状態の何れかの状態に切換選択自在な第3噛合機構SM3が設けられている。
【0044】
自動変速機1は、内燃機関ENG又はモータMGの動力を、車両に搭載されたエアコンディショナ用コンプレッサA/Cに伝達して駆動可能に構成されている。
【0045】
主入力軸11に対して、コンプレッサA/Cのコンプレッサ入力軸8がリバース軸6に配置されている。コンプレッサ入力軸8とリバースギヤGRとは、ベルト駆動機構BMを介して結合されている。これにより、第1入力軸4が回転しているとき、即ち、内燃機関ENG又はモータMG3が運転しているとき、コンプレッサ入力軸8は常に回転する。そして、コンプレッサA/Cは、第3クラッチC3を介してコンプレッサ入力軸8に接続されている。
【0046】
次に、上記の如く構成される自動変速機1の作動について説明する。
【0047】
自動変速機1では、第1クラッチC1を係合させることにより、モータMGのトルクを用いて内燃機関ENGを始動させるIMA始動を行うことができる。
【0048】
内燃機関ENGのトルクを用いて1速段を確立する場合には、ロック機構R1により遊星歯車機構PGのリングギヤRaを固定状態とし、第1クラッチC1を締結させて伝達状態とする。
【0049】
内燃機関ENGのトルクは、エンジン出力軸2、第1クラッチC1、第1入力軸4を介して、遊星歯車機構PGのサンギヤSaに入力され、エンジン出力軸2に入力された内燃機関ENGの回転数が1/(g+1)に減速されて、キャリアCaを介し3速駆動ギヤG3aに伝達される。
【0050】
3速駆動ギヤG3aに伝達されたトルクは、3速駆動ギヤG3a及び第1従動ギヤGo1で構成される3速ギヤ列G3のギヤ比(3速駆動ギヤG3aの歯数/第1従動ギヤGo1の歯数)をiとして、1/i(g+1)に変速されて第1従動ギヤGo1及び出力軸3aを介し出力部材3から出力され、1速段が確立される。このように、内燃機関ENGのトルクのみで走行するENG走行を行うことができる。
【0051】
このように、自動変速機1では、遊星歯車機構PG及び3速ギヤ列で1速段を確立できるため、1速段専用の噛合機構が必要なく、これにより、自動変速機の軸長の短縮化を図ることができる。
【0052】
尚、1速段において、車両が減速状態にあり、且つ蓄電装置BATTの残容量(充電率)SOCに応じて、動力制御装置ECUは、モータMGでブレーキをかけることにより発電を行う減速回生運転を行う。又、蓄電装置BATTの残容量SOCに応じて、モータMGを駆動させて、内燃機関ENGのトルクを補助するHEV(Hybrid Electric Vehicle)走行、又はモータMGのトルクのみで走行するEV(Electric Vehicle)走行を行うことができる。
【0053】
又、EV走行中であって車両の減速が許容された状態であり且つ車両速度が一定速度以上の場合には、第1クラッチC1を徐々に締結させることにより、モータMGのトルクを用いることなく、車両の運動エネルギーを用いて内燃機関ENGを始動させることができる。
【0054】
又、1速段で走行中に2速段にアップシフトされることを動力制御装置ECUが車両速度やアクセルペダルの開度等の車両情報から予測した場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結させる2速側連結状態又はこの状態に近付けるプリシフト状態とする。
【0055】
内燃機関ENGのトルクを用いて2速段を確立する場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結させた2速側連結状態とし、第2クラッチC2を締結して伝達状態とする。これにより、内燃機関ENGのトルクが、第2クラッチC2、アイドルギヤ列Gi、第2入力軸5、2速ギヤ列G2及び出力軸3aを介して、出力部材3から出力される。
【0056】
尚、2速段において、動力制御装置ECUがアップシフトを予測している場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態又はこの状態に近付けるプリシフト状態とする。
【0057】
逆に、動力制御装置ECUがダウンシフトを予測している場合には、第1噛合機構SM1を、第3駆動ギヤG3a及び第5駆動ギヤG5aと第1入力軸4との連結を断つニュートラル状態とする。
【0058】
これにより、アップシフト又はダウンシフトを、第1クラッチC1を伝達状態とし、第2クラッチC2を開放状態とするだけで行うことができ、変速段の切換えをトルクが途切れることなくスムーズに行うことができる。
【0059】
又、2速段においても、車両が減速状態にある場合、蓄電装置BATTの残容量SOCに応じて、動力制御装置ECUは、減速回生運転を行う。2速段において減速回生運転を行う場合には、第1噛合機構SM1が3速側連結状態であるか、ニュートラル状態であるかで異なる。
【0060】
第1噛合機構SM1が3速側連結状態である場合には、第2駆動ギヤG2aで回転される第1従動ギヤGo1によって回転する第3駆動ギヤG3aが第1入力軸4を介してモータMGの回転子MGbを回転させるため、この回転子MGbの回転を抑制しブレーキをかけることにより発電して回生を行う。
【0061】
第1噛合機構SM1がニュートラル状態である場合には、ロック機構R1を固定状態とすることによりリングギヤRaの回転数を「0」とし、第1従動ギヤGo1に噛合する3速駆動ギヤG3aと共に回転するキャリアCaの回転数を、サンギヤSaに連結させたモータMGにより発電させることによりブレーキをかけて、回生を行う。
【0062】
又、2速段においてHEV走行する場合には、例えば、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態として、ロック機構R1を開放状態とすることにより遊星歯車機構PGを各回転要素が相対回転不能な状態とし、モータMGのトルクを3速ギヤ列G3を介して出力部材3に伝達することにより行うことができる。又は、第1噛合機構SM1をニュートラル状態として、ロック機構R1を固定状態としてリングギヤRaの回転数を「0」とし、モータMGのトルクを1速段の経路で第1従動ギヤGo1に伝達することによっても、2速段によるHEV走行を行うことができる。
【0063】
内燃機関ENGのトルクを用いて3速段を確立する場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態として、第1クラッチC1を締結させて伝達状態とする。これにより、内燃機関ENGのトルクは、エンジン出力軸2、第1クラッチC1、第1入力軸4、第1噛合機構SM1、3速ギヤ列G3を介して、出力部材3に伝達され、1/iの回転数で出力される。
【0064】
3速段においては、第1噛合機構SM1が3速駆動ギヤG3aと第1入力軸4とを連結させた3速側連結状態となっているため、遊星歯車機構PGのサンギヤSaとキャリアCaとが同一回転となる。
【0065】
従って、遊星歯車機構PGの各回転要素が相対回転不能な状態となり、モータMGでサンギヤSaにブレーキをかければ減速回生となり、モータMGでサンギヤSaにトルクを伝達させれば、HEV走行を行うことができる。又、第1クラッチC1を開放して、モータMGのトルクのみで走行するEV走行も可能である。
【0066】
3速段において、動力制御装置ECUは、車両速度やアクセルペダルの開度等の車両情報に基づきダウンシフトが予測される場合には、第2噛合機構SM2を2速駆動ギヤG2aと第2入力軸5とを連結する2速側連結状態、又はこの状態に近付けるプリシフト状態とし、アップシフトが予測される場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結する4速側連結状態、又はこの状態に近付けるプリシフト状態とする。
【0067】
これにより、第2クラッチC2を締結させて伝達状態とし、第1クラッチC1を開放させて開放状態とするだけで、変速段の切換えを行うことができ、トルクが途切れることなく変速をスムーズに行うことができる。
【0068】
内燃機関ENGのトルクを用いて4速段を確立する場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結させた4速側連結状態とし、第2クラッチC2を締結させて伝達状態とする。
【0069】
4速段で走行中は、動力制御装置ECUが車両情報からダウンシフトを予測している場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態、又はこの状態に近付けるプリシフト状態とする。
【0070】
逆に、動力制御装置ECUが車両情報からアップシフトを予測している場合には、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態、又は、この状態に近付けるプリシフト状態とする。これにより、第1クラッチC1を締結させて伝達状態とし、第2クラッチC2を開放させて開放状態とするだけで、ダウンシフト又はアップシフトを行うことができ、トルクが途切れることなく変速をスムーズに行うことができる。
【0071】
4速段で走行中に減速回生又はHEV走行を行う場合には、動力伝達装置ECUがダウンシフトを予測しているときには、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態とし、モータMGでブレーキをかければ減速回生、トルクを伝達すればHEV走行を行うことができる。
【0072】
動力制御装置ECUがアップシフトを予測しているときには、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態とし、モータMGによりブレーキをかければ減速回生、モータMGからトルクを伝達させればHEV走行を行うことができる。
【0073】
内燃機関ENGのトルクを用いて5速段を確立する場合には、第1噛合機構SM1を5速駆動ギヤG5aと第1入力軸4とを連結した5速側連結状態とする。5速段においては、第1クラッチC1が伝達状態とされることにより内燃機関ENGとモータMGとが直結された状態となるため、モータMGからトルクを出力すればHEV走行を行うことができ、モータMGでブレーキをかけ発電すれば減速回生を行うことができる。
【0074】
尚、5速段でEV走行を行う場合には、第1クラッチC1を開放状態とすればよい。又、5速段でのEV走行中に、第1クラッチC1を徐々に締結させることにより、内燃機関ENGの始動を行うこともできる。
【0075】
動力制御装置ECUは、5速段で走行中に車両情報から4速段へのダウンシフトが予測される場合には、第2噛合機構SM2を4速駆動ギヤG4aと第2入力軸5とを連結させた4速側連結状態、又はこの状態に近付けるプリシフト状態とする。これにより、4速段へのダウンシフトをトルクが途切れることなくスムーズに行うことができる。
【0076】
内燃機関ENGのトルクを用いて後進段を確立する場合には、第3噛合機構SM3をリバースギヤGRとリバース軸6とを連結した連結状態として、第2クラッチC2を締結させて伝達状態とする。これにより、エンジン出力軸2の回転数がマイナス回転(後進方向の回転)に変速されて、出力部材3から出力され、後進段が確立される。
【0077】
後進段において、減速回生又はHEV走行を行う場合には、第1噛合機構SM1を3速駆動ギヤG3aと第1入力軸4とを連結した3速側連結状態とし、ロック機構R1を開放状態とすることにより遊星歯車機構PGを各回転要素が相対回転不能な状態とする。そして、逆転している回転子MGbに、正転側のトルクを発生さてブレーキをかければ減速回生となり、逆転側のトルクを発生させれば、HEV走行を行うことができる。又、両クラッチC1,C2を開放状態とし、ロック機構R1を固定状態として、モータMGを逆転させることにより、EV走行による後進段を確立することもできる。
【0078】
尚、図2に示すように、モータMGには、回転子MGbの磁極位置を検出する磁極位置検出器(磁極位置検出手段)12が組み付けられている。磁極位置検出器12は、例えば、磁気抵抗検出センサを周方向に複数設けたレゾルバのほか、ホール素子や光学式エンコーダを用いて構成された公知のものである。磁極位置検出器12は、回転子MGbの所定の基準回転位置からの磁極の回転角度θ(トルク軸の回転角度)の検出値を示す信号を磁極位置の検出信号として出力する。尚、磁極位置検出器12により得られる回転角度θの検出値(以下、磁極検出角θという)は、磁極位置検出器12の組付誤差や製造誤差等に起因して、一般には回転子MGbの実際の磁極位置(磁極の実際の回転角度θ act)に対して誤差が生じている。
【0079】
以下、本発明における学習処理の基本的な考え方を図3(a)及び図3(b)を参照して説明する。これらの図において、d−q座標は、dqベクトル制御の処理上のdq座標であり、回転子MGbの永久磁石による界磁極の磁束方向を界磁軸(d軸)とし、この界磁軸と直交する方向をトルク軸(q軸)としており、磁極位置検出器12(図2参照)により検出される磁極位置(以下、磁極検出位置という)により定まる。そして、dact−qact座標は、回転子MGbの実際の界磁方向を界磁軸とするdq座標(以下、実座標dact−qactという)である。
【0080】
ここで、モータMGの回転子MGbが回転しており、且つ、該モータMGの電機子電流I(電機子11の各相を流れる電流)が「0」になっている状態(以下、この状態を零電流状態という)に着目する。この零電流状態では、電機子印加電圧V(電機子11の各相の印加電圧)は、回転子MGbの界磁により発生する逆起電圧Eに等しくなる。この場合、磁極検出位置が真の磁極位置に対して誤差がなく、d−q座標は実座標dact−qactと一致する。このとき、dqベクトル制御の処理によって求められる界磁軸電圧指令値Vdc(界磁軸上の電圧指令値)はVdc=0となり、トルク軸電圧指令値Vqc(トルク軸上の電圧指令値)はVqc=Eとなる。
【0081】
従って、零電流状態でのdqベクトル制御の処理により求められる界磁軸電圧指令値Vdcが「0」となる状態では、磁極位置を正しく検出できる。このことは、磁極位置を正しく把握するためには、零電流状態で界磁軸電圧指令値Vdcが「0」となるように磁極検出位置を補正すればよいとことを意味している。
【0082】
又、零電流状態で、磁極検出位置が真の磁極位置に対して誤差があるとする。例えば図3(a)に示すように、d−q座標が実座標dact−qactに対して角度θofsの誤差を有するとする(以下、角度θofsを磁極位置誤差角θofsという)。このとき、dqベクトル制御の処理によって求められる界磁軸電圧指令値Vdc(界磁軸上の電圧指令値)はVdc≠0となり、トルク軸電圧指令値Vqc(トルク軸上の電圧指令値)はVqc≠Eとなる。そして、Vdcの2乗値と、Vqcの2乗値との和の平方根√(Vdc2 +Vqc2 )が逆起電圧Eの大きさに等しくなる。更に、この場合、界磁軸電圧指令値Vdcとトルク軸電圧指令値Vqcとの比(Vdc/Vqc)は、磁極位置誤差角θofsの正接tanθofsに等しくなる。すなわち、次式(1) が成立する。
θofs=tan−1 (Vdc/Vqc) … ( 1 )
【0083】
尚、逆起電圧Eの大きさ、ひいては界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの大きさ自体は、回転子MGbの回転速度ωに依存するが、式(1)は、零電流状態であれば回転子MGbの回転速度ωによらずに成立する。
【0084】
従って、零電流状態でdqベクトル制御の処理により求められる界磁軸電圧指令値Vdcとトルク軸電圧指令値Vqcとから、式(1)によって、磁極位置誤差角θofsを求めることができる。
【0085】
逆起電圧Eの大きさ、ひいては界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの大きさが大きい程、磁極位置誤差角θofsを高精度に求めることができる。そして、回転子MGbの回転速度ωが大きい程、逆起電圧Eは大きくなる。例えば図3(b)に示すように、逆起電圧E1を発生するため回転子MGbの回転速度ωは、逆起電圧E2を発生するため回転子MGbの回転速度ωよりも大きい。従って、磁極位置誤差角θofsを求める場合、回転子MGbの回転速度ωを大きくすることが好ましい。
【0086】
磁極位置誤差角θofsだけ、磁極検出位置を補正すれば、正しい磁極位置を把握できる。例えば、磁極検出位置に対応する磁極の回転角度位置をθとすれば、その回転角度θ から磁極位置誤差角θofsを減算した角度θ−θofsが、正しい磁極位置を表すものとなる。尚、以上説明した原理は、回転子MGbの磁石が円筒形であるか突極形であるかによらずに成立する。
【0087】
次に、モータ制御装置PDUについて、図2を参照して、説明する。
【0088】
モータ制御装置PDUは、dqベクトル制御によってモータMGの運転制御を行うものであり、モータMGに発生させるトルクの指令値であるトルク指令値Trc又は回転合わせトルク指令値βに応じて、界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを求める電流指令生成器21と、この電流指令生成器21が出力する界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(Idc,Iqc)と値「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(0,0)とを選択的に出力する電流指令切換器22とを備えている。
【0089】
電流指令生成器21に入力されるトルク指令値Trcは、動力制御装置ECUによって車両の運転状態(アクセル操作量等)に応じて設定される。そして、電流指令生成器21は、入力されたトルク指令値Trcからテーブルを参照してモータMGに発生させるために要する界磁軸電流及びトルク軸電流を求め、それらを界磁軸電流指令値Idc及びトルク軸電流指令値Iqcとして出力する。又、電流指令切換器22は、その出力を後述する位相補正器30からの切換指令に応じて切換える。
【0090】
又、モータ制御装置PDUは、モータMGの電機子11のU相、V相を流れる電機子電流Iu,Ivをそれぞれ検出する電機子電流検出器23u,23vと、その電機子電流Iu,Ivの検出値を座標変換することによってd−q座標での界磁軸電流Id及びトルク軸電流Iqを算出する電流座標変換器24とを備えている。ここで、電機子11は3相であるため、2相を流れる電流を検出すれば他の1相を流れる電流は算出できる。例えばW相を流れる電流は、−(Iu+Iv)となる。このため、本実施形態では電機子電流検出器23u,23vは2つの相(本実施形態ではU相、V相)の電流を検出する。又、電流座標変換器24は、回転子MGbの磁極の回転角度を示す磁極回転角θを用いて、次式(2)により座標変換を行う。
【0091】
【数1】
【0092】
この座標変換により求められるId及びIqは、磁極回転角θにより定まるd−q座標(θをトルク軸の回転位置として定まるdq座標)でのトルク軸電流の検出値及び界磁軸電流の検出値としての意味を有する。以下、Id、Iqをそれぞれ界磁軸検出電流Id,トルク軸検出電流Iqという。
【0093】
又、モータ制御装置PDUは、電流指令切換器22から出力される界磁軸電流指令値Idと電流座標変換器24により求められる界磁軸検出電流Idの偏差、並びに、電流指令切換器22から出力されるトルク軸電流指令値Iqcと電流座標変換器24により求められるトルク軸検出電流Iqとの偏差をそれぞれ求める減算処理器25,26と、これらの偏差(Idc−Id),(Iqc−Iq)に応じてd−q座標での各軸方向の印加電圧の指令値である界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める電圧指令生成器27と、その界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを座標変換することによって電機子11の各相の印加電圧の指令値Vuc,Vvc,Vwc(以下、相電圧指令値Vuc,Vvc,Vwcという)を算出する電圧座標変換器28と、該相電圧指令値Vuc,Vvc,Vwcに従って電機子11に印加する三相交流電圧をPWM(Pulse Width Modulation)制御するPWMインバータ回路29(モータドライブ回路)とを備えている。
【0094】
電圧指令生成器27は、基本的には、前記偏差(Idc−Id),(Iqc−Iq)がそれぞれ「0」に近似するようにPI制御則等のフィードバック制御則に基づいて界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める。尚、この種の電圧指令生成器27は、公知のものであるので詳細な説明は省略するが、電圧指令生成器27は、フィードバック制御則の処理に加えて、界磁軸、トルク軸軸間での速度起電力の干渉を補償するための非干渉制御の処理を行うことにより、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを求める。
【0095】
電圧座標変換器28は、電流座標変換器24の座標変換で使用した磁極回転角θを用いて、次式(3)により座標変換を行う
【0096】
【数2】
【0097】
この座標変換により求められる相電圧指令値Vuc,Vvc,Vwcは、電機子11の各相U,V,Wの印加電圧の大きさ及び位相を規定するものであり、PWMインバータ回路29は、相電圧指令値Vuc,Vvc,Vwcに従って電機子11の各相U,V,Wに交流電圧を印加する。
【0098】
又、PWMインバータ回路29は、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの2以上の整数倍の周波数の電圧値を当該界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcにそれぞれ選択的に加えることが可能な高調波重畳機能を有している。この高調波重畳機能の実行の有無は、後述する位相補正器30の指令に応じて切換えられる。
【0099】
モータ制御装置PDUは、更に、磁極位置検出器12による磁極検出角θの、実際の磁極の回転角度θactからの誤差角を表す磁極位置誤差角θofsを求めて出力する位相補正器30と、この位相補正器30から出力される磁極位置誤差角θofs(以下、磁極補正角θofsという)を磁極位置検出器12による磁極検出角θから減算することにより、電流座標変換器24及び電圧座標変換器28の座標変換で用いる磁極回転角θact(=θ−θofs)を求める減算処理器31と、磁極検出角θを微分することによりモータMGの回転子MGbの回転速度(詳しくは回転角速度)ω=dθ/dtを求める速度算出器32とを備えている。
【0100】
尚、回転速度ωは、適宜の速度センサを用いて検出するようにしてもよい。或いは、図示しない回転速度センサにより検出される第1入力軸4(図1参照)の回転速度Neを上記回転速度ωの代わりに用いてもよい。
【0101】
位相補正器30は、本発明における補正量決定手段に相当し、本発明の磁極位置補正量に相当する磁極補正量(位相補正量)θofsを求める学習処理を行う。学習処理の詳細は後述するが、位相補正器30は、所定の条件下で磁極補正角θofsを求めて記憶保持し、該所定の条件下以外のモータMGの通常的な運転時には、記憶保持している磁極補正角θofsを出力する。
【0102】
そして、位相補正器30には、学習処理を行うために、トルク指令Trcが入力されると共に、電圧指令生成器21から界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの算出値が入力され、速度算出器32から回転角速度ωの算出値が入力される。
【0103】
位相補正器30には、自動変速機1の状態を表す自動変速機情報(例えば、各クラッチC1〜C3及び各噛合機構SM1,SM2の状態、及び第1主入力軸4の回転速度Neなど)が動力制御装置ECUを介して入力される。又、位相補正器30は、学習処理を実行しているときに、電流指令切換器22から値「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcの組(0,0)を出力させるための切換指令を電流指令切換器22に出力する。
【0104】
又、位相補正器30は、回転合わせトルク指令値βをトルク指令切換器33に対して出力する。そして、トルク指令切換器33は、動力制御装置ECUからトルク指令値Trcも入力され、位相補正器30からの切換指令に応じて、トルク指令値Trc又は回転合わせトルク指令値βを出力する。
【0105】
尚、以上説明したモータ制御装置PDUにおいて、電流指令生成器21、電流指令切換器22、減算処理器25,26,19、電圧指令生成器27、電流座標変換器24、電圧座標変換器28、位相補正器30、速度算出器32は、本実施形態では所定のプログラムが実装されたマイクロコンピュータ(入出力回路を含む)の機能的手段として構成されている。
【0106】
次に、動力制御装置ECU及びモータ制御装置PDUの処理について、図4を参照して、説明する。
【0107】
磁極位置検出器12の修理、交換等によって、学習処理が行われていない場合(S1:NO)、磁極位置検出器12の組付誤差や製造誤差等に起因して、磁極位置検出器12により検出される磁極位置は実際の磁極位置に対して誤差がある。そこで、この場合、以下のような制限処理を行う(S2)。
【0108】
EV走行を行うと、トルク指令値Trcに対してモータMGから実際に出力されるトルクは精度が劣るので、車両の走行が不安定となる。そこで、学習処理が終わるまで、動力制御装置ECUはEV走行を禁止する。
【0109】
又、磁極位置検出器12により検出された磁極位置をそのまま用いると、電機子電圧の位相が実際の位相に対して誤差が生じるので、PWMインバータ回路29で高調波重畳機能を実行すると、電機子電圧が共振するおそれがある。そこで、位相補正器30はPWMインバータ回路29に高調波重畳機能を実行しない旨の指令を出力する。
【0110】
又、モータMGが必要なトルクを精度良く出力することができないので、モータMGのトルクを用いて発生させる第1クラッチC1の係合トルクの精度が悪化するため、内燃機関ENGの始動を確実に行うことができない。そこで、動力制御装置ECUは、スタータSTを用いて内燃機関ENGの始動を行う。
【0111】
尚、車両がスタータSTを備えない場合、モータ制御装置PDUは、内燃機関ENGの始動を行う際の所定のトルク指令値Trc(第2のトルク指令値)を、学習処理後の内燃機関ENGの始動を行う際の所定のトルク指令値Trc(第1のトルク指令値)よりも高い値に設定する。これにより、モータMGの力率や効率の低下を補うことができ、内燃機関ENGの始動を確実となる。
【0112】
又、モータMGの力率や効率が低下しているので、エアコンディショナが安定的に作動しない。そこで、動力制御装置ECUは、クラッチC3を伝達遮断状態として、エアコンディショナ用コンプレッサA/Cが駆動することを禁止する。
【0113】
そして、学習処理が行われていない場合(S1:NO)、車両が奇数段でエンジン走行しているか否かを判断する(S3)。具体的には、内燃機関ENGが駆動し、自動変速機1で奇数段が確立され、且つ第1クラッチC1が伝達状態であるか否かを判断する。
【0114】
S3の判断結果でYESである場合には、モータMGの回転速度ω、ひいては第1入力軸4の回転速度Neが所定値以下(例えば2000rpm)であるか否かを判断する(S4)。
【0115】
S3の判断結果でYESである場合には、モータMGの回転速度ωが略一定であるか否かを判断する(S5)。具体的には、速度算出器32により求められるモータMGの回転速度ωの経時的な変動幅が所定時間以上、所定幅であるか否かにより判断する。
【0116】
S5の判断結果がYESである場合には、トルク指令値Trcが略「0」であるか否かを判断する(S6)。この判断は、トルク指令値Trcが「0」近傍の所定範囲内にあるか否かにより判断する。
【0117】
S6の判断結果がYESである場合には、S7の学習処理を実行して磁極補正角θofsを求める。S7の学習処理については、後述する。尚、S2〜S6の判断結果が全てYESである状態が、本発明における第1の走行状態に相当する。
【0118】
一方、S3の判断結果でNOである場合には、車両が偶数段でエンジン走行しているか否かを判断する(S8)。具体的には、内燃機関ENGが駆動し、自動変速機1で偶数段が確立され、且つ第1クラッチC2が伝達状態であるか否かを判断する。S8の判断結果でNOである場合には、S2に戻る。尚、S8の判断結果がYESである状態が、本発明における第2の走行状態に相当する。
【0119】
S8の判断結果でYESである場合には、まず、プレシフトにより第1噛合機構SM1が連結状態の場合には、連結状態を解除してニュートラル状態とする(S9)。これにより、モータMGから出力されるトルクが出力軸3aに伝達されなくなる。
【0120】
そして、モータMGがトルクを出力し、回転速度ωが上昇するように、モータ制御装置PDUに対してトルク指令Trcを出力する(S10)。そして、モータMGの回転速度ωが所定の回転速度条件を満たすか否かを判断する(S11)。ここで、所定の回転速度条件とは、回転速度ωが予め定められた所定範囲内にあり、且つ、回転変動が規定回転変動以下にあることである。例えば、高速回転であり、モータMGの逆起電力が大きい場合、或いは、学習中に回転が停止するような極めて低速回転の場合は回避される。S11の判断結果がNOの場合には、回転速度条件を満たすまでS11の判断を繰り返す。
【0121】
S11の判断結果がYESの場合には、S12の学習処理を実行して磁極補正角θofsを求める。尚、S12の学習処理については、後述する。S12の学習処理中は、変速段を維持したままエンジン走行を続行する。変速段やエンジン走行を維持できない場合には、S12の学習処理を中止し、S2に戻る。
【0122】
S7又はS12の学習処理の後、前記制限処理を解除する(S13)。具体的には、EV走行が許可され、位相補正器30はPWMインバータ回路29に高調波重畳機能を実行する旨の指令を出力し、内燃機関ENGの始動はモータMGのトルクを用いて行い、エアコンディショナの作動が許可される。
【0123】
以下、図5を参照して、S7の学習処理について説明する。このS7の学習処理は、本発明の第1の学習処理に相当する。
【0124】
まず、位相補正器30は、値が共に「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを電流指令切換器22に出力させる切換指令を該電流指令切換器22に与える(S21)。更に、位相補正器30は、仮設定補正角αを「0」として、これを磁極補正角θofsの代わりに出力する(S22)。
【0125】
この場合、減算処理器31で求められる磁極回転角θは、θ−α=θとなる。従って、磁極位置検出器12による磁極検出角θがそのまま、電流座標変換器24及び電圧座標変換器28の座標変換で用いる磁極回転角θとして、それらの変換器24,16に入力される。そして、この状態で、モータ制御装置PDUは、界磁軸検出電流Id及びトルク軸検出電流Iqをそれらの指令値である「0」に合致させるように相電圧指令値Vuc,Vvc,Vwcを求めて、モータMGの電機子の印加電圧を操作する。この結果、モータMGの実際の電機子電流(U,V,Wの各相を流れる電流)が略「0」に制御される。
【0126】
S22の処理を実行した後、位相補正器30は所定時間待機し(S23)、後述するS24の処理を実行する。ここで、上記所定時間は、S22の処理を実行してから、モータMGの実際の電機子電流が十分に「0」近傍に収束するまでに必要十分な時間として予め定められた時間であり、例えば0.5秒である。尚、S23で所定時間待機する代わりに、電機子電流検出器23u,23vにより検出される電機子電流を監視し、それらが「0 」近傍の所定の範囲内に収まったときに、S24の処理を実行してもよい。
【0127】
S23にて、モータMGは零電流状態となる。このとき、モータ制御装置PDUのdqベクトル制御の処理上で認識されている磁極の回転角度(図3(a)のトルク軸の回転角度位置)、すなわち、磁極回転角θは、磁極位置検出器12による磁極検出角θであるので、該磁極検出角θの、実際の磁極位置の回転角θactに対する誤差角は、式(1)により表される。そこで、位相補正器30は、電圧指令生成器27が求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて式(1)の右辺の演算を行い、その演算により求めた値を新たに磁極補正角θofsとして求める(S24)。
【0128】
位相補正器30は、この求めた磁極補正角θofsを記憶保持し(S25)、S7の学習処理を終了する。
【0129】
以下、図6を参照して、S12の学習処理について説明する。
【0130】
モータMGが停止するときのモータMGの回転速度ωは「0」でアイドル状態である。この状態から、モータ制御装置PDUは、モータMGの回転速度ωが上昇するように、モータ制御装置PDUに対してトルク指令Trcを出力する。これにより、モータMGの回転速度ωは徐々に上昇し、例えば、1200rpmまで上昇する(S31)。
【0131】
その後、位相補正器30は、値が共に「0」の界磁軸電流指令値Idc及びトルク軸電流指令値Iqcを電流指令切換器22に出力させる切換指令を該電流指令切換器22に出力する(S32)。そして、この状態で、位相補正器30は仮設回転合わせトルク指令値βを「0」として、これをトルク指令値としてトルク指令切換器33を介して電流指令生成器21に出力する(S33)。
【0132】
S32の処理を実行した後、位相補正器30は所定時間待機する(S34)。これにより、モータMGの慣性による回転速度ωの上昇中に学習処理が行われることが回避される。図7に示すように、回転速度ωが上昇したモータMGは、回転子MGbの慣性により回転し続けるが、回転速度ωが機械損失により徐々に低下する。
【0133】
そして、位相補正器30は、電圧指令生成器27が求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて式(1)の右辺の演算を行い、その演算により求めた値を新たに磁極補正角θofsとして求める(S35)。位相補正器30は、この回転速度ωが低下する期間に、式(1)からtan−1(Vdc/Vqc)として磁極補正量θofsを求める(S35)。これにより、界磁軸電圧指令値Vdcが「0」に設定され、トルク軸電圧指令値Vqcは、電機子11の逆起電力Eに相当する電圧となる。
【0134】
尚、回転速度ωが「0」となるまでに、電圧指令生成器27は界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcの組を、図7に点で示す各時点で複数求め得るが、上述したように回転速度ωが大きい程、磁極位置誤差角θofsを高精度に求めることができる。そこで、所定時間待機した(S34)後、電圧指令生成器27が最初に求めた界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて位相補正器30が求めた値を新たに磁極補正角θofsとして求めることが好ましい(S35)。
【0135】
以上のように、本実施形態によれば、車両が奇数段で走行している場合であっても、偶数段で走行している場合であっても、走行に影響を及ぼすことなく、自動変速機1に状態に応じた適切な学習処理によって高精度の磁極補正角θofsを早急に求めることができる。
【0136】
尚、本発明に係るハイブリッド車両は、上述したハイブリッド車両に限定されない。特に、自動変速機は、上述した自動変速機1に限定されず、第1断接手段を介して選択的に内燃機関ENGのトルクが伝達され、電機子MGbに接続された第1入力軸、第2断接手段を介して選択的に内燃機関ENGのトルクが伝達される第2入力軸、第1入力軸と出力軸を選択的に連結する第1選択手段、及び第2入力軸と出力軸を選択的に連結する第2選択手段を有し、内燃機関ENG及びモータMGから出力される動力を変速して出力軸に伝達するものであればよい。
【0137】
又、本実施形態では、S7の学習処理に用いる仮設定補正角αを「0」にしたが、他の値、例えば磁極補正角θofsの現在値を仮設定補正角αとして用いてもよい。この場合には、S24において、式(1)の右辺の演算により求められる値を、磁極補正角θofsの現在値に加算することで、新たな磁極補正角θofsを求めるようにすればよい。
【0138】
又、本実施形態では、S24において、界磁軸電圧指令値Vdc及びトルク軸電圧指令値Vqcを用いて磁極補正角θofsを演算で求めたが、仮設定補正角αを複数種類の値に設定し、探索的に磁極補正角θofsを求めてもよい。更に詳細には、仮設定補正角αの初期値を例えば「0」として、これを磁極補正角θofsの代わりに出力した後、モータMGの実際の電機子電流が十分に「0」近傍に収束するまで待機する。次いで、電圧指令生成器27が求めた界磁軸電圧指令値Vdcが略「0」であるか否かを判断する。この判断結果がYESである場合には、現在出力している仮設定補正角αを磁極検出角θから減算してなる磁極回転角θが、回転子MGbの実際の磁極の回転角と略一致する。従って、この場合には、現在出力している仮設定補正角αを磁極補正角θofsとして求め、この磁極補正角θofsを記憶保持する。
【0139】
一方、前記判断結果がNOである場合には、現在出力している仮設定補正角αを磁極検出角θから減算してなる磁極回転角θが、回転子MGbの実際の磁極の回転角と一致しない(図3(a)の状態になっている)。そして、この場合には、仮設定補正角αを、その現在値に予め定めた微小な所定量Δαだけ増加させた値に更新して処理を繰り返す。
【0140】
このようにして、界磁軸電圧指令値Vdcが略「0」になるまで、仮設定補正角αの値が所定量Δαずつ変化され、界磁軸電圧指令値Vdcが略「0」となるような仮設定補正角αが探索される。そして、その探索された仮設定補正角αの値が、最終的に磁極補正角θofsとして求められ、記憶保持される。
【符号の説明】
【0141】
1…自動変速機、 3a…出力軸、 4…第1入力軸、 5…第2入力軸、 11…電機子、 12…磁極位置検出器(磁極位置検出手段)、 21…電流指令生成器、 22…電流指令切換器、 23u,23v…電機子電流検出器、 24…電流座標変換器、 27…電圧指令生成器、 28…電圧座標変換器、 29…PWMインバータ回路(電流制御手段)、 30…位相補正器(補正量決定手段)、 32…速度算出器、 A/C…エアコンディショナ用コンプレッサ、 C1…第1クラッチ(第1断接手段)、 C2…第2クラッチ(第2断接手段)、 ECU…動力制御装置(始動時トルク設定手段)、 ENG…内燃機関、 MG…モータ(回転電機)、 MGa…固定子、 MGb…回転子、 PDU…モータ制御装置、 SM1…第1噛合機構(第1選択手段)、 SM2…第2噛合機構(第2選択手段)、 ST…スタータ(電動機)。
【特許請求の範囲】
【請求項1】
内燃機関と、
回転子及び固定子にそれぞれ永久磁石及び電機子を設けた永久磁石式回転電機と、
第1断接手段を介して選択的に前記内燃機関のトルクが伝達され、前記回転子に接続された第1入力軸、第2断接手段を介して選択的に前記内燃機関のトルクが伝達される第2入力軸、前記第1入力軸と出力軸を選択的に連結する第1選択手段、及び前記第2入力軸と出力軸を選択的に連結する第2選択手段を有し、前記内燃機関及び前記回転電機から出力される動力を変速して前記出力軸に伝達する自動変速機と、
前記回転子の磁極位置を検出する磁極位置検出手段と、
該磁極位置検出手段により検出される磁極位置を補正するための磁極位置補正量を求める補正量決定手段と、
前記磁極位置検出手段により検出された磁極位置を前記補正量決定手段により求められた磁極位置補正量で補正してなる磁極位置に応じて前記電機子に印加する電機子電圧の位相を操作しつつ、該電機子に流れる電機子電流を制御する電流制御手段とを備え、
前記補正量決定手段は、前記内燃機関が駆動し、前記第1断接手段が接続状態であり、且つ前記第1選択手段により前記第1入力軸と出力軸とが選択的に連結されて、当該車両が走行する第1の走行状態では、前記磁極位置補正量を第1の学習処理により求め、前記内燃機関が駆動し、前記第2断接手段が接続状態であり、且つ前記第2選択手段により前記第2入力軸と出力軸とが選択的に連結されて、当該車両が走行する第2の走行状態では、前記磁極位置補正量を第2の学習処理により求めることを特徴とするハイブリッド車両。
【請求項2】
前記第1の学習処理は、前記回転子が回転している状態で、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記磁極位置補正量を所定の仮設定値に定めて該ベクトル制御の処理を実行し、該ベクトル制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることを特徴とする請求項1に記載のハイブリッド車両。
【請求項3】
前記第2の学習処理は、前記第1選択手段を連結解除状態にして、前記回転電機を駆動させて前記回転子の回転速度を一旦上昇させた後、前記回転子の回転速度の下降中に、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記回転電機を取扱うトルク制御におけるトルク指令値を所定の仮設定値に定めて該トルク制御の処理を実行し、該トルク制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることを特徴とする請求項1又は2に記載のハイブリッド車両。
【請求項4】
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記回転電機のトルクのみによる当該車両の走行を禁止することを特徴とする請求項1から3の何れか1項に記載のハイブリッド車両。
【請求項5】
前記電流制御手段は、前記補正量決定手段により前記磁極位置補正量を求めた後、前記電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を前記電機子に印加するように制御することを特徴とする請求項1から4の何れか1項に記載のハイブリッド車両。
【請求項6】
前記内燃機関に接続される電動機を備え、
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記電動機を駆動させて前記内燃機関を始動させることを特徴とする請求項1から5の何れか1項に記載のハイブリッド車両。
【請求項7】
前記内燃機関の始動時に前記回転電機を取扱うトルク制御におけるトルク指令値を設定する始動時トルク指令値設定手段を備え、
該始動時トルク指令値設定手段は、前記補正量決定手段により前記磁極位置補正量を求めるまで、第1のトルク指令値を設定し、前記補正量決定手段により前記磁極位置補正量を求めた後、前記第1のトルク指令値より高い第2のトルク指令値を設定することを特徴とする請求項1から5の何れか1項に記載のハイブリッド車両。
【請求項8】
第3断接手段を介して選択的に前記第1入力軸に接続されるエアコンディショナ用コンプレッサを備え、
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記第3断接手段を伝達状態にすることを禁止することを特徴とする請求項1から7の何れか1項に記載のハイブリッド車両。
【請求項1】
内燃機関と、
回転子及び固定子にそれぞれ永久磁石及び電機子を設けた永久磁石式回転電機と、
第1断接手段を介して選択的に前記内燃機関のトルクが伝達され、前記回転子に接続された第1入力軸、第2断接手段を介して選択的に前記内燃機関のトルクが伝達される第2入力軸、前記第1入力軸と出力軸を選択的に連結する第1選択手段、及び前記第2入力軸と出力軸を選択的に連結する第2選択手段を有し、前記内燃機関及び前記回転電機から出力される動力を変速して前記出力軸に伝達する自動変速機と、
前記回転子の磁極位置を検出する磁極位置検出手段と、
該磁極位置検出手段により検出される磁極位置を補正するための磁極位置補正量を求める補正量決定手段と、
前記磁極位置検出手段により検出された磁極位置を前記補正量決定手段により求められた磁極位置補正量で補正してなる磁極位置に応じて前記電機子に印加する電機子電圧の位相を操作しつつ、該電機子に流れる電機子電流を制御する電流制御手段とを備え、
前記補正量決定手段は、前記内燃機関が駆動し、前記第1断接手段が接続状態であり、且つ前記第1選択手段により前記第1入力軸と出力軸とが選択的に連結されて、当該車両が走行する第1の走行状態では、前記磁極位置補正量を第1の学習処理により求め、前記内燃機関が駆動し、前記第2断接手段が接続状態であり、且つ前記第2選択手段により前記第2入力軸と出力軸とが選択的に連結されて、当該車両が走行する第2の走行状態では、前記磁極位置補正量を第2の学習処理により求めることを特徴とするハイブリッド車両。
【請求項2】
前記第1の学習処理は、前記回転子が回転している状態で、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記磁極位置補正量を所定の仮設定値に定めて該ベクトル制御の処理を実行し、該ベクトル制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることを特徴とする請求項1に記載のハイブリッド車両。
【請求項3】
前記第2の学習処理は、前記第1選択手段を連結解除状態にして、前記回転電機を駆動させて前記回転子の回転速度を一旦上昇させた後、前記回転子の回転速度の下降中に、前記回転子の界磁方向を界磁軸、該界磁軸に直交する方向をトルク軸とする座標系で前記回転電機を取扱うベクトル制御における界磁軸電流指令値及びトルク軸電流指令値の両者を零に保持しつつ、前記回転電機を取扱うトルク制御におけるトルク指令値を所定の仮設定値に定めて該トルク制御の処理を実行し、該トルク制御の実行時に求めた界磁軸電圧指令値とトルク軸電圧指令値とから、該界磁軸電圧指令値及びトルク軸電圧指令値のみを変数とする所定の演算式に基づき前記磁極位置補正量の真値を求める処理であることを特徴とする請求項1又は2に記載のハイブリッド車両。
【請求項4】
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記回転電機のトルクのみによる当該車両の走行を禁止することを特徴とする請求項1から3の何れか1項に記載のハイブリッド車両。
【請求項5】
前記電流制御手段は、前記補正量決定手段により前記磁極位置補正量を求めた後、前記電機子電圧の2以上の整数倍の周波数の電圧を当該電機子電圧に加えた電圧を前記電機子に印加するように制御することを特徴とする請求項1から4の何れか1項に記載のハイブリッド車両。
【請求項6】
前記内燃機関に接続される電動機を備え、
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記電動機を駆動させて前記内燃機関を始動させることを特徴とする請求項1から5の何れか1項に記載のハイブリッド車両。
【請求項7】
前記内燃機関の始動時に前記回転電機を取扱うトルク制御におけるトルク指令値を設定する始動時トルク指令値設定手段を備え、
該始動時トルク指令値設定手段は、前記補正量決定手段により前記磁極位置補正量を求めるまで、第1のトルク指令値を設定し、前記補正量決定手段により前記磁極位置補正量を求めた後、前記第1のトルク指令値より高い第2のトルク指令値を設定することを特徴とする請求項1から5の何れか1項に記載のハイブリッド車両。
【請求項8】
第3断接手段を介して選択的に前記第1入力軸に接続されるエアコンディショナ用コンプレッサを備え、
前記補正量決定手段により前記磁極位置補正量を求めるまで、前記第3断接手段を伝達状態にすることを禁止することを特徴とする請求項1から7の何れか1項に記載のハイブリッド車両。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−240903(P2011−240903A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−117382(P2010−117382)
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]