
ハイブリッド車両
【課題】ハイブリッド車両において、ブレーキ操作された時に、速やかに自動変速機のダウンシフトを開始して、エンジン回転速度がロックアップ解除されるエンジン回転速度まで低下しないようにし、燃料カットを持続させて燃費を向上する。
【解決手段】制御手段は、エンジン回転速度と減速度とに基づいて車両状態が自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には自動変速機をアップシフトしないように制御する。
【解決手段】制御手段は、エンジン回転速度と減速度とに基づいて車両状態が自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には自動変速機をアップシフトしないように制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、ハイブリッド車両に係り、特に車両が制動中であると認識した場合に、モータを発電機として動作させ、車両の運動エネルギを電気エネルギに変換してバッテリに蓄えることにより燃費の向上を図るハイブリッド車両に関する。
【背景技術】
【0002】
車両においては、運動エネルギを発生するエンジンと電気エネルギにより駆動力を発生するモータとの双方によって駆動できるハイブリッド車両が知られている。
このハイブリッド車両には、エンジンとこのエンジンに結合するモータとを設け、モータ駆動時にモータに電力を供給するとともに回生制動時には発電機として動作するモータから充電されるバッテリを設け、クラッチを介してエンジンと接続する自動変速機を設け、エンジンとモータとの少なくとも一方の駆動力を駆動軸に伝達するものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−9415号公報
【0004】
特許文献1に係るハイブリッド車両は、自動変速機を搭載し、制動中の制御であって、制動時のエンジンブレーキを小さくして回生電力を増大させ、高負荷時のモータによるエンジンの補完を有効に行わせるものである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献1において、回生制動時にダウンシフトを遅らせるものであることから、回生制動を利用した車両の減速走行時に、自動変速機の変速段を高速段側にシフトアップして回生制動トルクを増加させることが考えられる。例えば、3速と6速とで比較した場合に、6速の方が、エンジン回転速度が低くなり、エンジンブレーキによる制動が少なくなるので、回生トルクを3速の方よりも多くとることができる。
このため、目標ギヤ段が高く設定されるので、高ギヤ段を実現するために、加速後のアップシフト動作が多くなる傾向があった。また、運転者がアクセルペダルを踏み込んで加速した後に、アクセルペダルを戻す時、又は、アクセルペダルを離した時に、目標ギヤ段に達するための変速回数が増加したことにより、アップシフトが完了するまでに時間を要するようになった。
一方、燃費向上を目的として、一般に、アクセルペダルを踏み込んでいない減速時に、自動変速機のロックアップクラッチを係合(又は半係合)し、車両慣性力によりエンジンを回転させ、燃料カット制御をすることが行われている。
しかしながら、車両速度が低下すると、エンジン回転速度も低下し、そのままロックアップクラッチの係合・燃料カット制御を継続すると、最終的に、エンジンが停止してしまうため、一定のエンジン回転速度以下では、燃料噴射を再開するとともに、ロックアップクラッチの解放を行う必要がある。
したがって、車両走行中に、運転者がブレーキペダルを踏み込んだ場合に、車速の低下に伴い、エンジン回転速度を維持するため、ダウンシフトする必要があった。
さらに、目標ギヤ段が高く設定されている車両において、アップシフトの完了前に、運転者がブレーキペダルを踏み込んで制動状態になった場合に、アップシフトが完了しなければ、ダウンシフトが開始できない。そして、変速するには時間を要するので、ダウンシフトの開始の遅れにより、ダウンシフトの開始時のエンジン回転速度が低くなる傾向がある。その結果、ロックアップ許可下限回転数に達し、ロックアップが外れ、燃料供給が復帰するので、燃費が悪化するという問題があった。
つまり、自動変速機は 例えば、運転者がアクセルペダルを踏み込んだ状態から戻して行けば、車速が変化しなくとも目標ギヤ段が高くなるように設定されている。よって、運転者がアクセルペダルを離すと、目標ギヤ段が高ギヤ段になるのに伴い、アップシフトが要求される。
しかしながら、アップシフト要求どおりにアップシフトを実行した場合、そのアップシフトの完了前に、運転者がブレーキペダルを踏み込めば、車両状態に応じ、燃料供給の復帰によって燃費が悪化してしまうため、改善が望まれていた。
【0006】
そこで、この発明は、燃料カットを持続させて燃費を向上するハイブリッド車両を提供することにある。
【課題を解決するための手段】
【0007】
この発明は、エンジンとこのエンジンに結合するモータとを設け、モータ駆動時に前記モータに電力を供給するとともに回生制動時には発電機として動作する前記モータから充電されるバッテリを設け、クラッチを介して前記エンジンと接続する自動変速機を設け、前記エンジンと前記モータとの少なくとも一方の駆動力を駆動軸に伝達するハイブリッド車両において、エンジン回転速度を検出するエンジン回転速度検出手段を設け、車両の減速度を算出する減速度算出手段を備え、前記エンジン回転速度検出手段により検出されたエンジン回転速度と前記減速度算出手段により算出された減速度とに基づいて車両状態が前記自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には前記自動変速機をアップシフトしないように制御する制御手段を設けたことを特徴とする。
【発明の効果】
【0008】
この発明のハイブリッド車両は、ブレーキ操作された時に、速やかに自動変速機のダウンシフトを開始させ、エンジン回転速度がロックアップ解除されるエンジン回転速度まで低下しないようにし、燃料カットを持続させて燃費を向上できる。
【図面の簡単な説明】
【0009】
【図1】図1はアップシフト禁止制御のフローチャートである。(実施例)
【図2】図2はハイブリッド車両の制御装置のシステム構成図である。(実施例)
【図3】図3は自動変速機のシフトレバーの動作点の一例を示す図である。(実施例)
【図4】図4は適合テーブルの一例を示す図である。(実施例)
【図5】図5は適合テーブルにより実現できるアップシフト禁止領域の一例を示す図である。(実施例)
【発明を実施するための形態】
【0010】
この発明は、燃料カットを持続させて燃費を向上する目的を、ブレーキ操作された時に、速やかに自動変速機のダウンシフトを開始させて実現するものである。
【実施例】
【0011】
図1〜図5は、この発明の実施例を示すものである。
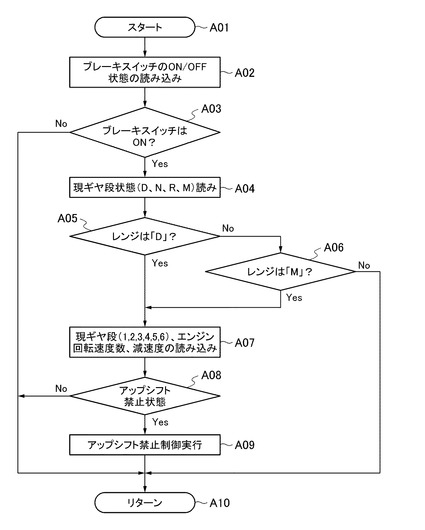
図2において、1はハイブリッド車両、2はこのハイブリッド車両1の制御装置である。
ハイブリッド車両1には、運動エネルギを発生するエンジン3と、このエンジン3に結合するモータとして、第1のモータ4と第2のモータ5とが搭載される。
第1のモータ4は、エンジン3と並列に配置され、エンジン3とベルト等の伝動手段6を介して連結し、12V駆動のヘッドランプ等の各種補機7に電力を供給する。
第2のモータ5は、エンジン3と直列に連結し、発電機能を有しているのに加え、駆動力を発生する。
なお、この実施例に係るハイブリッド車両1では、第1のモータ4に駆動力も発生できる機能を有さしめ、第2のモータ5を省略する構造とすることも可能である。
また、ハイブリッド車両1には、モータ駆動時に第2のモータ5に電力を供給するとともに、回生制動時には発電機として動作する該第2のモータ5から充電されるバッテリ8が搭載されている。このバッテリ8には、インバータ9を介して第2のモータ5が接続している。
【0012】
更に、ハイブリッド車両1には、クラッチ(ロックアップクラッチ)10及び第2のモータ5を介してエンジン3と連結する自動変速機11が搭載される。
この自動変速機11は、無段変速機等の各種変速機からなるものであり、車輪12が取り付けられた駆動軸13に連結している。車輪12は、制動力を発生するブレーキ機構14を備えている。駆動軸13は、エンジン3側から伝達された駆動力を車輪12に出力するものである。
自動変速機11は、運転者の操作によるアクセルペダルの踏み込み状態と車速とにより、目標ギヤ段を決定するものであって、例えば、アクセルペダルを運転者が踏み込んだ状態から戻していけば、車速が変化しなくとも目標ギヤ段が高くなるように設定され、よって、運転者がアクセルペダルを離すと、目標ギヤ段が高ギヤ段になるのに伴い、アップシフトが要求される機能を備えている。
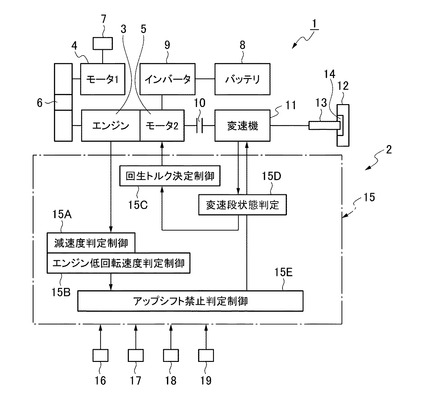
この自動変速機11のシフトレバーの動作点は、例えば、図3に示すように、自動側(オートモード)で、「D」、「N」、「R」、「P」であって、手動側(Mモード)では、「+」、「−」であり、各点で選択可能なものである。
なお、「D」レンジが選択されている場合、1速から6速までを自動で変速する。一方、「手動側(Mモード)が選択されている場合、現ギヤ段を保持し、シフトレバーを前方に倒すとアップシフトができ、後方に倒すと、ダウンシフトを要求できる。
【0013】
エンジン3と第2のモータ5と自動変速機11とは、制御装置2の制御手段15に連絡している。
また、制御手段15には、エンジン回転速度を検出するエンジン回転速度検出手段16と、車速を検出する車速検出手段17と、運転者のブレーキ操作を検出するブレーキ操作検出手段18と、自動変速機11のシフトレンジ状態(変速段状態)を検出するレンジ検出手段19とが連絡している。なお、ブレーキ操作検出手段18は、ブレーキペダルの踏み込み状態(オン/オフ状態:制動状態)を検出するブレーキスイッチやブレーキペダルのストロークを検出するブレーキストロークセンサ等、制動状態を検出できるものであればよい。
制御手段15は、エンジン3と第2のモータ5との少なくとも一方の駆動力を駆動軸13に伝達するものである。
【0014】
制御手段15は、車速に基づいて車両の減速度(今回の車速と前回の車速との差)を算出する減速度算出手段15Aと、エンジン回転速度に基づいてエンジン低回転速度を算出するエンジン低回転速度算出手段15Bと、制動状態に基づいて回生トルクを算出する回生トルク算出手段15Cと、変速段状態を判定する変速段状態判定手段15Dと、自動変速機11のアップシフト禁止領域にあるか否かを判定するアップシフト禁止判定手段15Eとを備える。
そして、この制御手段15は、エンジン回転速度検出手段16により検出されたエンジン回転速度と減速度算出手段15Aにより算出された減速度とに基づいて車両状態が自動変速機11のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には自動変速機11をアップシフトしないように制御する。
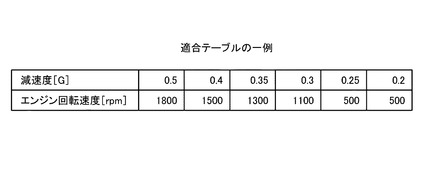
図4には、エンジン回転速度(rpm)と減速度(G)との適合テーブルの一例を示す。この適合テーブルにおいては、エンジン回転速度が低くなる程、減速度が小さくなる。
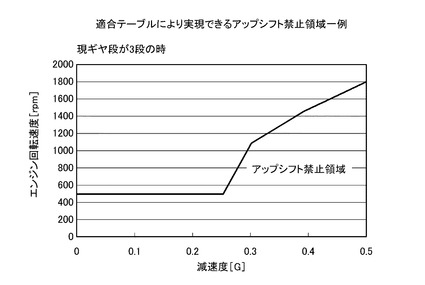
図5には、この適合テーブルにより実現できるアップシフト禁止領域の一例を示す。このアップシフト禁止領域は、エンジン回転速度がある程度高くなり、且つある程度減速度が大きくなった時に、大きく設定される。
具体的には、運転者がブレーキ操作したことをブレーキ操作検出手段18により検出した場合に、現ギヤ段、減速度、エンジン回転速度を読み込み、ギヤ段毎に、図5のようにアップシフト禁止領域を設定する。且つ、車両状態が図5のアップシフト禁止域に該当したら、アップシフト禁止を決定し、現ギヤ段以上にならないようにしている。例えば、アイドル回転速度が700rpmと設定されているとき、図5の減速度0.25G以下のようにシフトアップ禁止領域のエンジン回転速度の閾値をアイドル回転速度よりも低く設定すれば、エンジン回転速度は、車両走行時に、アイドル回転速度を下回ることはないので、0.1Gから0.25Gまでの減速度領域では、実質的に、アップシフト禁止要求がない。
このような制御により、ブレーキ操作された時に速やかに自動変速機11のダウンシフトが開始されるため、エンジン回転速度がロックアップ解除されるエンジン回転速度まで低下しないようにすることができる。この結果、燃料カットを持続することができ、燃費を向上することができる。
【0015】
また、制御手段15は、回生制動時には非回生制動時よりも自動変速機11をアップシフトするように制御する。
これにより、エンジン回転速度が低くなりエンジンブレーキが少なくなる分、回生トルクを多く取ることができる。
【0016】
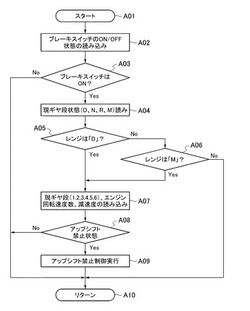
以下に、この実施例に係るアップシフト禁止制御について、図1のフローチャートに基づいて説明する。
図1に示すように、制御手段15のプログラムがスタートすると(ステップA01)、先ず、ブレーキスイッチのオン/オフ状態、つまり、ブレーキペダルが運転者によって踏み込まれているか否かを読み込み(ステップA02)、そして、ブレーキスイッチがオンか否かを判断する(ステップA03)。
このステップA03がYESの場合には、現ギヤ状態(シフトレンジ状態:D、N、R、M)を読み込み(ステップA04)、「D」レンジが選択されたか否かを判断する(ステップA05)。
このステップA05がNOの場合には、「Mモード」が選択されたか否かを判断する(ステップA06)。
そして、このステップA06がYESの場合、又は、前記ステップA05がYESの場合には、現ギヤ段(1速、2速、3速、4速、5速、6速)と、エンジン回転速度と、減速度とを読み込み(ステップA07)、アップシフト禁止状態か否かを判断する(ステップA08)。
このステップA08がYESの場合には、アップシフト禁止制御を実行する(ステップA09)。つまり、「Dレンジ」の場合には、現ギヤ段が維持される。一方、「Mモード」の場合には、運転者が、たとえ、シフトレバーを操作してアップシフトを要求しても、アップシフトさせない。
このステップA09の処理後、前記ステップA03がNOの場合、前記ステップA06がNOで、現ギヤ段が維持された場合、又は、前記ステップA08がNOの場合には、プログラムをリターンさせる(ステップA10)。
【0017】
この結果、この実施例においては、目標ギヤ段へのシフトアップの完了前で、運転者がブレーキペダルを踏み込んで、減速度が大きく、低エンジン回転速度のときに、燃費を向上させることができ、そして、アップシフトを禁止できる。よって、ギヤ段、エンジン回転速度と減速度とに基づいて、アップシフト禁止状態か否かを判定し、アップシフト禁止要求を実行し、ギヤ段を維持させ、これにより、運転者が加速後、即ブレーキペダルを踏み込んだ場合に、ダウンシフトの開始の遅れに起因するエンジン回転速度の低下を抑制することができる。
また、従来の特許文献1と比べて、追加部品が少なく、小スペースで、低コストとすることができる。
【産業上の利用可能性】
【0018】
この発明に係るハイブリッド車両のアップシフト禁止制御を、各種電動車両に適用可能である。
【符号の説明】
【0019】
1 ハイブリッド車両
2 ハイブリッド車両の制御装置
3 エンジン
4 第1のモータ
5 第2のモータ
8 バッテリ
10 クラッチ
11 自動変速機
13 駆動軸
15 制御手段
15A 減速度算出手段
16 エンジン回転速度検出手段
17 車速検出手段
18 ブレーキ操作検出手段
19 レンジ検出手段
【技術分野】
【0001】
この発明は、ハイブリッド車両に係り、特に車両が制動中であると認識した場合に、モータを発電機として動作させ、車両の運動エネルギを電気エネルギに変換してバッテリに蓄えることにより燃費の向上を図るハイブリッド車両に関する。
【背景技術】
【0002】
車両においては、運動エネルギを発生するエンジンと電気エネルギにより駆動力を発生するモータとの双方によって駆動できるハイブリッド車両が知られている。
このハイブリッド車両には、エンジンとこのエンジンに結合するモータとを設け、モータ駆動時にモータに電力を供給するとともに回生制動時には発電機として動作するモータから充電されるバッテリを設け、クラッチを介してエンジンと接続する自動変速機を設け、エンジンとモータとの少なくとも一方の駆動力を駆動軸に伝達するものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−9415号公報
【0004】
特許文献1に係るハイブリッド車両は、自動変速機を搭載し、制動中の制御であって、制動時のエンジンブレーキを小さくして回生電力を増大させ、高負荷時のモータによるエンジンの補完を有効に行わせるものである。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献1において、回生制動時にダウンシフトを遅らせるものであることから、回生制動を利用した車両の減速走行時に、自動変速機の変速段を高速段側にシフトアップして回生制動トルクを増加させることが考えられる。例えば、3速と6速とで比較した場合に、6速の方が、エンジン回転速度が低くなり、エンジンブレーキによる制動が少なくなるので、回生トルクを3速の方よりも多くとることができる。
このため、目標ギヤ段が高く設定されるので、高ギヤ段を実現するために、加速後のアップシフト動作が多くなる傾向があった。また、運転者がアクセルペダルを踏み込んで加速した後に、アクセルペダルを戻す時、又は、アクセルペダルを離した時に、目標ギヤ段に達するための変速回数が増加したことにより、アップシフトが完了するまでに時間を要するようになった。
一方、燃費向上を目的として、一般に、アクセルペダルを踏み込んでいない減速時に、自動変速機のロックアップクラッチを係合(又は半係合)し、車両慣性力によりエンジンを回転させ、燃料カット制御をすることが行われている。
しかしながら、車両速度が低下すると、エンジン回転速度も低下し、そのままロックアップクラッチの係合・燃料カット制御を継続すると、最終的に、エンジンが停止してしまうため、一定のエンジン回転速度以下では、燃料噴射を再開するとともに、ロックアップクラッチの解放を行う必要がある。
したがって、車両走行中に、運転者がブレーキペダルを踏み込んだ場合に、車速の低下に伴い、エンジン回転速度を維持するため、ダウンシフトする必要があった。
さらに、目標ギヤ段が高く設定されている車両において、アップシフトの完了前に、運転者がブレーキペダルを踏み込んで制動状態になった場合に、アップシフトが完了しなければ、ダウンシフトが開始できない。そして、変速するには時間を要するので、ダウンシフトの開始の遅れにより、ダウンシフトの開始時のエンジン回転速度が低くなる傾向がある。その結果、ロックアップ許可下限回転数に達し、ロックアップが外れ、燃料供給が復帰するので、燃費が悪化するという問題があった。
つまり、自動変速機は 例えば、運転者がアクセルペダルを踏み込んだ状態から戻して行けば、車速が変化しなくとも目標ギヤ段が高くなるように設定されている。よって、運転者がアクセルペダルを離すと、目標ギヤ段が高ギヤ段になるのに伴い、アップシフトが要求される。
しかしながら、アップシフト要求どおりにアップシフトを実行した場合、そのアップシフトの完了前に、運転者がブレーキペダルを踏み込めば、車両状態に応じ、燃料供給の復帰によって燃費が悪化してしまうため、改善が望まれていた。
【0006】
そこで、この発明は、燃料カットを持続させて燃費を向上するハイブリッド車両を提供することにある。
【課題を解決するための手段】
【0007】
この発明は、エンジンとこのエンジンに結合するモータとを設け、モータ駆動時に前記モータに電力を供給するとともに回生制動時には発電機として動作する前記モータから充電されるバッテリを設け、クラッチを介して前記エンジンと接続する自動変速機を設け、前記エンジンと前記モータとの少なくとも一方の駆動力を駆動軸に伝達するハイブリッド車両において、エンジン回転速度を検出するエンジン回転速度検出手段を設け、車両の減速度を算出する減速度算出手段を備え、前記エンジン回転速度検出手段により検出されたエンジン回転速度と前記減速度算出手段により算出された減速度とに基づいて車両状態が前記自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には前記自動変速機をアップシフトしないように制御する制御手段を設けたことを特徴とする。
【発明の効果】
【0008】
この発明のハイブリッド車両は、ブレーキ操作された時に、速やかに自動変速機のダウンシフトを開始させ、エンジン回転速度がロックアップ解除されるエンジン回転速度まで低下しないようにし、燃料カットを持続させて燃費を向上できる。
【図面の簡単な説明】
【0009】
【図1】図1はアップシフト禁止制御のフローチャートである。(実施例)
【図2】図2はハイブリッド車両の制御装置のシステム構成図である。(実施例)
【図3】図3は自動変速機のシフトレバーの動作点の一例を示す図である。(実施例)
【図4】図4は適合テーブルの一例を示す図である。(実施例)
【図5】図5は適合テーブルにより実現できるアップシフト禁止領域の一例を示す図である。(実施例)
【発明を実施するための形態】
【0010】
この発明は、燃料カットを持続させて燃費を向上する目的を、ブレーキ操作された時に、速やかに自動変速機のダウンシフトを開始させて実現するものである。
【実施例】
【0011】
図1〜図5は、この発明の実施例を示すものである。
図2において、1はハイブリッド車両、2はこのハイブリッド車両1の制御装置である。
ハイブリッド車両1には、運動エネルギを発生するエンジン3と、このエンジン3に結合するモータとして、第1のモータ4と第2のモータ5とが搭載される。
第1のモータ4は、エンジン3と並列に配置され、エンジン3とベルト等の伝動手段6を介して連結し、12V駆動のヘッドランプ等の各種補機7に電力を供給する。
第2のモータ5は、エンジン3と直列に連結し、発電機能を有しているのに加え、駆動力を発生する。
なお、この実施例に係るハイブリッド車両1では、第1のモータ4に駆動力も発生できる機能を有さしめ、第2のモータ5を省略する構造とすることも可能である。
また、ハイブリッド車両1には、モータ駆動時に第2のモータ5に電力を供給するとともに、回生制動時には発電機として動作する該第2のモータ5から充電されるバッテリ8が搭載されている。このバッテリ8には、インバータ9を介して第2のモータ5が接続している。
【0012】
更に、ハイブリッド車両1には、クラッチ(ロックアップクラッチ)10及び第2のモータ5を介してエンジン3と連結する自動変速機11が搭載される。
この自動変速機11は、無段変速機等の各種変速機からなるものであり、車輪12が取り付けられた駆動軸13に連結している。車輪12は、制動力を発生するブレーキ機構14を備えている。駆動軸13は、エンジン3側から伝達された駆動力を車輪12に出力するものである。
自動変速機11は、運転者の操作によるアクセルペダルの踏み込み状態と車速とにより、目標ギヤ段を決定するものであって、例えば、アクセルペダルを運転者が踏み込んだ状態から戻していけば、車速が変化しなくとも目標ギヤ段が高くなるように設定され、よって、運転者がアクセルペダルを離すと、目標ギヤ段が高ギヤ段になるのに伴い、アップシフトが要求される機能を備えている。
この自動変速機11のシフトレバーの動作点は、例えば、図3に示すように、自動側(オートモード)で、「D」、「N」、「R」、「P」であって、手動側(Mモード)では、「+」、「−」であり、各点で選択可能なものである。
なお、「D」レンジが選択されている場合、1速から6速までを自動で変速する。一方、「手動側(Mモード)が選択されている場合、現ギヤ段を保持し、シフトレバーを前方に倒すとアップシフトができ、後方に倒すと、ダウンシフトを要求できる。
【0013】
エンジン3と第2のモータ5と自動変速機11とは、制御装置2の制御手段15に連絡している。
また、制御手段15には、エンジン回転速度を検出するエンジン回転速度検出手段16と、車速を検出する車速検出手段17と、運転者のブレーキ操作を検出するブレーキ操作検出手段18と、自動変速機11のシフトレンジ状態(変速段状態)を検出するレンジ検出手段19とが連絡している。なお、ブレーキ操作検出手段18は、ブレーキペダルの踏み込み状態(オン/オフ状態:制動状態)を検出するブレーキスイッチやブレーキペダルのストロークを検出するブレーキストロークセンサ等、制動状態を検出できるものであればよい。
制御手段15は、エンジン3と第2のモータ5との少なくとも一方の駆動力を駆動軸13に伝達するものである。
【0014】
制御手段15は、車速に基づいて車両の減速度(今回の車速と前回の車速との差)を算出する減速度算出手段15Aと、エンジン回転速度に基づいてエンジン低回転速度を算出するエンジン低回転速度算出手段15Bと、制動状態に基づいて回生トルクを算出する回生トルク算出手段15Cと、変速段状態を判定する変速段状態判定手段15Dと、自動変速機11のアップシフト禁止領域にあるか否かを判定するアップシフト禁止判定手段15Eとを備える。
そして、この制御手段15は、エンジン回転速度検出手段16により検出されたエンジン回転速度と減速度算出手段15Aにより算出された減速度とに基づいて車両状態が自動変速機11のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には自動変速機11をアップシフトしないように制御する。
図4には、エンジン回転速度(rpm)と減速度(G)との適合テーブルの一例を示す。この適合テーブルにおいては、エンジン回転速度が低くなる程、減速度が小さくなる。
図5には、この適合テーブルにより実現できるアップシフト禁止領域の一例を示す。このアップシフト禁止領域は、エンジン回転速度がある程度高くなり、且つある程度減速度が大きくなった時に、大きく設定される。
具体的には、運転者がブレーキ操作したことをブレーキ操作検出手段18により検出した場合に、現ギヤ段、減速度、エンジン回転速度を読み込み、ギヤ段毎に、図5のようにアップシフト禁止領域を設定する。且つ、車両状態が図5のアップシフト禁止域に該当したら、アップシフト禁止を決定し、現ギヤ段以上にならないようにしている。例えば、アイドル回転速度が700rpmと設定されているとき、図5の減速度0.25G以下のようにシフトアップ禁止領域のエンジン回転速度の閾値をアイドル回転速度よりも低く設定すれば、エンジン回転速度は、車両走行時に、アイドル回転速度を下回ることはないので、0.1Gから0.25Gまでの減速度領域では、実質的に、アップシフト禁止要求がない。
このような制御により、ブレーキ操作された時に速やかに自動変速機11のダウンシフトが開始されるため、エンジン回転速度がロックアップ解除されるエンジン回転速度まで低下しないようにすることができる。この結果、燃料カットを持続することができ、燃費を向上することができる。
【0015】
また、制御手段15は、回生制動時には非回生制動時よりも自動変速機11をアップシフトするように制御する。
これにより、エンジン回転速度が低くなりエンジンブレーキが少なくなる分、回生トルクを多く取ることができる。
【0016】
以下に、この実施例に係るアップシフト禁止制御について、図1のフローチャートに基づいて説明する。
図1に示すように、制御手段15のプログラムがスタートすると(ステップA01)、先ず、ブレーキスイッチのオン/オフ状態、つまり、ブレーキペダルが運転者によって踏み込まれているか否かを読み込み(ステップA02)、そして、ブレーキスイッチがオンか否かを判断する(ステップA03)。
このステップA03がYESの場合には、現ギヤ状態(シフトレンジ状態:D、N、R、M)を読み込み(ステップA04)、「D」レンジが選択されたか否かを判断する(ステップA05)。
このステップA05がNOの場合には、「Mモード」が選択されたか否かを判断する(ステップA06)。
そして、このステップA06がYESの場合、又は、前記ステップA05がYESの場合には、現ギヤ段(1速、2速、3速、4速、5速、6速)と、エンジン回転速度と、減速度とを読み込み(ステップA07)、アップシフト禁止状態か否かを判断する(ステップA08)。
このステップA08がYESの場合には、アップシフト禁止制御を実行する(ステップA09)。つまり、「Dレンジ」の場合には、現ギヤ段が維持される。一方、「Mモード」の場合には、運転者が、たとえ、シフトレバーを操作してアップシフトを要求しても、アップシフトさせない。
このステップA09の処理後、前記ステップA03がNOの場合、前記ステップA06がNOで、現ギヤ段が維持された場合、又は、前記ステップA08がNOの場合には、プログラムをリターンさせる(ステップA10)。
【0017】
この結果、この実施例においては、目標ギヤ段へのシフトアップの完了前で、運転者がブレーキペダルを踏み込んで、減速度が大きく、低エンジン回転速度のときに、燃費を向上させることができ、そして、アップシフトを禁止できる。よって、ギヤ段、エンジン回転速度と減速度とに基づいて、アップシフト禁止状態か否かを判定し、アップシフト禁止要求を実行し、ギヤ段を維持させ、これにより、運転者が加速後、即ブレーキペダルを踏み込んだ場合に、ダウンシフトの開始の遅れに起因するエンジン回転速度の低下を抑制することができる。
また、従来の特許文献1と比べて、追加部品が少なく、小スペースで、低コストとすることができる。
【産業上の利用可能性】
【0018】
この発明に係るハイブリッド車両のアップシフト禁止制御を、各種電動車両に適用可能である。
【符号の説明】
【0019】
1 ハイブリッド車両
2 ハイブリッド車両の制御装置
3 エンジン
4 第1のモータ
5 第2のモータ
8 バッテリ
10 クラッチ
11 自動変速機
13 駆動軸
15 制御手段
15A 減速度算出手段
16 エンジン回転速度検出手段
17 車速検出手段
18 ブレーキ操作検出手段
19 レンジ検出手段
【特許請求の範囲】
【請求項1】
エンジンとこのエンジンに結合するモータとを設け、モータ駆動時に前記モータに電力を供給するとともに回生制動時には発電機として動作する前記モータから充電されるバッテリを設け、クラッチを介して前記エンジンと接続する自動変速機を設け、前記エンジンと前記モータとの少なくとも一方の駆動力を駆動軸に伝達するハイブリッド車両において、エンジン回転速度を検出するエンジン回転速度検出手段を設け、車両の減速度を算出する減速度算出手段を備え、前記エンジン回転速度検出手段により検出されたエンジン回転速度と前記減速度算出手段により算出された減速度とに基づいて車両状態が前記自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には前記自動変速機をアップシフトしないように制御する制御手段を設けたことを特徴とするハイブリッド車両。
【請求項2】
前記制御手段は、回生制動時には非回生制動時よりも前記自動変速機をアップシフトするように制御することを特徴とする請求項1に記載のハイブリッド車両。
【請求項1】
エンジンとこのエンジンに結合するモータとを設け、モータ駆動時に前記モータに電力を供給するとともに回生制動時には発電機として動作する前記モータから充電されるバッテリを設け、クラッチを介して前記エンジンと接続する自動変速機を設け、前記エンジンと前記モータとの少なくとも一方の駆動力を駆動軸に伝達するハイブリッド車両において、エンジン回転速度を検出するエンジン回転速度検出手段を設け、車両の減速度を算出する減速度算出手段を備え、前記エンジン回転速度検出手段により検出されたエンジン回転速度と前記減速度算出手段により算出された減速度とに基づいて車両状態が前記自動変速機のアップシフト禁止領域にあるか否かを判定し、このアップシフト禁止領域にあると判定された時には前記自動変速機をアップシフトしないように制御する制御手段を設けたことを特徴とするハイブリッド車両。
【請求項2】
前記制御手段は、回生制動時には非回生制動時よりも前記自動変速機をアップシフトするように制御することを特徴とする請求項1に記載のハイブリッド車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−254713(P2012−254713A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−128813(P2011−128813)
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月9日(2011.6.9)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]