
ハイブリッド電源式電動車両

【課題】加速状態が一定時間以上続く場合においても、電動機出力の低下を起こすことなく、効果的に要求出力を所定時間維持することが出来るハイブリッド電源式電動車両を提供する。
【解決手段】本発明によるハイブリッド電源式電動車両1は、エネルギ電源(E電池)2と、パワー電源(P電池)4と、電動機10と、E電池及びP電池から電動機に供給される電力を調整する電力調整器6と、第1に、加速時における電動機の要求出力を加速開始時に決定し、第2に、決定された電動機の要求出力の最大出力時間を設定し、第3に、その最大出力時間の間、E電池の出力電力を電動機の要求出力に対して出力可能な最大電力に設定すると共にP電池の出力電力を電動機の要求出力に対してE電池の出力電力を補う電力に設定し、第4に、加速時、その設定されたE電池及びP電池の出力電力が得られるよう電力調整器を制御する電源出力制御手段14と、を有する。
【解決手段】本発明によるハイブリッド電源式電動車両1は、エネルギ電源(E電池)2と、パワー電源(P電池)4と、電動機10と、E電池及びP電池から電動機に供給される電力を調整する電力調整器6と、第1に、加速時における電動機の要求出力を加速開始時に決定し、第2に、決定された電動機の要求出力の最大出力時間を設定し、第3に、その最大出力時間の間、E電池の出力電力を電動機の要求出力に対して出力可能な最大電力に設定すると共にP電池の出力電力を電動機の要求出力に対してE電池の出力電力を補う電力に設定し、第4に、加速時、その設定されたE電池及びP電池の出力電力が得られるよう電力調整器を制御する電源出力制御手段14と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド電源式電動車両に係り、特に、低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両に関する。
【背景技術】
【0002】
特許文献1及び2には、エネルギ電池とパワー電池とを組み合わせたバッテリハイブリッド電源及びその負荷電流制御装置が開示されている。
特許文献1に開示された技術では、エネルギ電源からの出力電流を一定値以下に制限するので、加速状態が連続する場合や加速頻度が高い場合等に、パワー電池からの電力放出量が大きくなり、エネルギ電池からの充電が間に合わずに加速時にパワー電池の容量が不足する、という問題がある。
また、特許文献2に開示された技術では、車両の走行状況を考慮せずに一定の制御を行っているので、加速状態が連続する場合や加速頻度が高い場合等に、パワー電池の容量が不足し、十分な加速ができなくなる、という問題がある。
【0003】
従来、このような問題を解決するために、特許文献3に開示された技術では、加速状態が連続する場合や加速頻度が高い場合等の走行状況を考慮した電力制御が提案されている。この特許文献3の電力制御では、走行状況を表すパラメータに基づいて充電電力、出力電力を算出し、要求される負荷電力が大きい場合、パワー電池から車両駆動用モータに電力を供給し、また、要求される負荷電力が大きく且つ所定加速度以上の状態が所定時間以上継続した場合、エネルギ電池から供給される電力量を増加し且つパワー電池から供給される電力量を減少するよう制御している。
【0004】
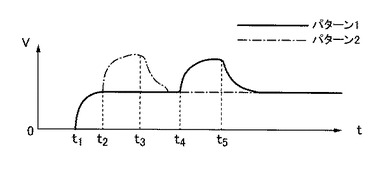
この特許文献3の技術では、例えば、図1のパターン1で示すような走行状態における時刻t1からt2の間の加速時に、図2に実線で示すように、エネルギ電池から所定の電力がモータに供給されると共にパワー電池から所定の電力がモータに供給される。そして、時刻t2からt3の間の定常走行時に、エネルギ電池から、定常走行に必要な電力がモータに供給されると共にパワー電池を充電するための電力が出力される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭50−153227号公報
【特許文献2】特開昭50−153228号公報
【特許文献3】特開平8−33120号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献3に記載のエネルギ電池とパワー電池の各々の出力電力制御は、加速度と加速連続時間との関数で決定される値のみに基づいたものであるので、要求モータ出力と実際に得られるモータ出力との間に差が出る場合があることが問題となる。即ち、例えば、要求されるパワー電池の電力供給量に対する出力可能時間が考慮されていないので、加速状態が一定時間以上続く場合等に、パワー電池の容量が不足してしまう、という問題が生じる。
【0007】
例えば、特許文献3の技術では、図1のパターン2で示すように、時刻t1からt2の間の加速の後、時刻t2からt3にかけてさらに加速をするような場合、図2(a)及び図2(b)に一点鎖線で示すような出力がそれぞれエネルギ電池及びパワー電池に要求される。しかしながら、パワー電池の容量は、時刻t1からt2の間に所定量減少しており、時刻t2からt3にかけてのさらなる加速時に、図2(c)に二点鎖線で示すように、パワー電池のエネルギ不足が生じることが懸念される。このようなエネルギ供給不足が生じると、図2(a)に二点鎖線で示すように、モータに供給されるトータル電力(総要求電力Pm)が不足し、モータの出力が低下する。このようなパワー電池の容量不足による出力低下は、運転者が意図しないものであり、違和感を与える可能性が高い。
【0008】
本発明は、上述した問題点を解決するためになされたものであり、加速状態が一定時間以上続く場合においても、モータ出力の低下を起こすことなく、効果的に要求出力を所定時間維持することが出来るハイブリッド電源式電動車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するために本発明は、低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両であって、エネルギ電源及びパワー電源から電動機に供給される電力を調整する電力調整器と、電動車両の加速時における電動機の要求出力を加速開始時に決定する電動機要求出力決定手段と、決定された電動機の要求出力の所定の最大出力時間を設定する出力時間設定手段と、所定の最大出力時間の間、エネルギ電源の出力電力を、電動機の要求出力に対して出力可能な最大の電力に設定し、パワー電源の出力電力を、電動機の要求出力に対してエネルギ電源の出力電力を補う電力に設定する電源要求出力設定手段と、電動車両の加速時、電源要求出力設定手段により設定されたエネルギ電源の出力電力及びパワー電源の出力電力が得られるよう、電力調整器を制御する制御手段と、を有することを特徴としている。
このように構成された本発明においては、加速開始時に、電動車両の加速時における電動機の要求出力が決定され、この電動機の要求出力の所定の最大出力時間が決定され、この所定の最大出力時間の間、エネルギ電源の出力電力が、電動機の要求出力に対して出力可能な最大の電力に設定され、パワー電源の出力電力が、電動機の要求出力に対してエネルギ電源の出力電力を補う電力に設定され、加速時、それらの設定された電力がエネルギ電源及びパワー電源からそれぞれ電動機に供給されるので、車両の加速が一定時間以上続く場合においても、少なくとも決定された最大出力時間の間、パワー電源の容量不足(充電不足)に起因する電動機の出力低下が発生することを抑制することが出来、それにより、運転者に違和感を与えることなく、効果的に、要求されるモータ出力を高出力要求通り維持することが出来る。
【0010】
本発明において、好ましくは、電源要求出力設定手段は、電動機の要求出力が、エネルギ電源の最大の出力電力より小さい場合、エネルギ電源のみから上記電動機に電力を供給するよう設定する。
このように構成された本発明においては、加速時に、パワー電源の容量(残量)をより温存することが出来る。
【0011】
本発明において、好ましくは、さらに、電動車両のアクセルのアクセル開度を検出するアクセル開度センサと、この検出されたアクセル開度からアクセル開速度を算出するアクセル開速度算出手段と、加速開始時における電動機の出力とアクセル開度との関係をアクセル開速度に応じて規定した電動機出力決定マップと、を有し、電動機要求出力決定手段は、電動機出力決定マップに基づいて、検出されたアクセル開度及び算出されたアクセル開速度から電動機の要求出力を決定する。
このように構成された本発明においては、加速開始時、運転者の意図に沿った電動機の要求出力を得ることが出来る。また、上述した電源要求出力設定手段及び制御手段により、加速時、このようなモータ要求出力が維持されるので、より確実に、運転者に違和感を与えることを防止することが出来る。
【0012】
本発明において、好ましくは、さらに、電動機の定格出力時間と定格出力との関係を規定した電動機定格出力マップを有し、出力時間設定手段は、この電動機定格出力マップにおいて、定格出力を電動機の要求出力とし、電動機定格出力マップに基づいて、電動機の要求出力を持続可能な定格出力時間の最大値を算出し、この算出された定格出力時間の最大値を電動機の要求出力の最大出力時間として設定する。
このように構成された本発明においては、電動機の定格出力時間と定格出力との関係に基づいて、電動機の性能を最大限引き出した最大の出力時間を設定することが出来る。これにより、最大出力時間の間、要求される電動機出力が維持されるので、加速状態が一定時間以上続く場合にも、より効果的に、要求通りの出力を得ることが出来る。
【0013】
本発明において、好ましくは、電動機の定格出力と定格出力時間との関係は、電動機の許容発熱量に基づいて規定される。
このように構成された本発明においては、電動機の許容発熱量より大きな発熱が生じることを防止することが出来るので、電動機の出力低下が生じることを防止することが出来る。従って、より確実に、要求通りに出力を維持することが出来る。
【0014】
本発明において、好ましくは、さらに、エネルギ電源のエネルギ容量の残量を検出するエネルギ電源残量検出手段と、エネルギ電源の出力密度、出力持続時間の関係をエネルギ電源のエネルギ残量に応じて規定したエネルギ電源SOCマップと、このエネルギ電源SOCマップにおいて、その出力持続時間を電動機の要求出力の最大出力時間とし、エネルギ電源SOCマップに基づいて、最大出力時間とした出力持続時間及び検出されたエネルギ電源のエネルギ残量からエネルギ電源の出力可能な出力密度を算出し、この算出された出力密度及びエネルギ電源の搭載重量に基づいて、エネルギ電源の出力可能な電力を決定するエネルギ電源出力可能電力決定手段と、を有し、電源要求出力設定手段は、この決定された出力可能な電力をエネルギ電源の最大の電力として設定する。
このように構成された本発明においては、エネルギ電源のエネルギ残量、出力密度及び搭載重量に応じて、適切に、エネルギ電源の出力可能な最大の電力を設定することが出来ると共に、エネルギ電源に要求される出力電力を安定して出力させることが出来る。
【0015】
本発明において、好ましくは、さらに、パワー電源のエネルギ容量の残量を検出するパワー電源残量検出手段と、パワー電源の出力密度、出力持続時間の関係をパワー電源のエネルギ残量に応じて規定したパワー電源SOCマップと、このパワー電源SOCマップにおいて、その出力持続時間を電動機の要求出力の最大出力時間とし、パワー電源SOCマップに基づいて、最大出力時間とした出力持続時間及び検出されたパワー電源のエネルギ残量からパワー電源の出力可能な出力密度を算出し、この算出された出力密度及びパワー電源の搭載重量に基づいて、パワー電源の出力可能な電力を決定するパワー電源出力可能電力決定手段と、を有する。
このように構成された本発明においては、パワー電源のエネルギ残量(充電量)、出力密度及び搭載重量に応じて、適切に、パワー電源からモータへの出力電力を設定することが出来ると共に、パワー電源に要求される出力電力を安定して出力させることが出来る。
【0016】
本発明において、好ましくは、電源要求出力設定手段は、電源要求出力設定手段により設定されたパワー電源の出力電力が、パワー電源出力可能電力決定手段により決定された出力可能な電力より大きい場合、パワー電源の出力電力を決定された出力可能な電力に設定する。
このように構成された本発明においては、パワー電源の劣化等に伴いパワー電源の出力密度が極端に低下するような場合であっても、パワー電源のエネルギ残量等に応じて出力制限をかけ、その制限された出力電力が、上述した電源要求出力設定手段及び制御手段により電動機の要求出力の最大出力時間の間維持される。このように、加速時、あえて出力を一定に制限する代わりに、その制限された出力電力を最大出力時間、一定に維持することが出来、これにより、加速時に運転者の意図に反した大幅な速度低下が生じるようなことを防止して、運転者に与える違和感を少なく抑えることが出来る。
【0017】
本発明において、好ましくは、パワー電源及びエネルギ電源は、いずれもリチウムイオン電池である。
このように構成された本発明においては、高エネルギ/低パワー型(エネルギ電源)と高パワー/低エネルギ型(パワー電源)の互いのエネルギ容量性能及びパワー性能差が比較的小さいリチウムイオン電池を用いる。ここで、一般的に、エネルギ電源の最大パワーの出力時間内における出力変動はパワー電源より小さく、また、エネルギ電源は、通常、パワー電源より多く積載されるので、このようなエネルギ電源のパワー性能をより大きなものに確保することが出来る。これにより、加速状態が一定時間以上続く場合にも、より確実に、電動機出力を要求通り維持することが出来る。
【0018】
本発明において、好ましくは、パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である。
このように構成された本発明においては、車両の発進時等の高出力が必要な場合に、モータに電力を有効に供給することが出来ると共に、制動時には電力の吸収(充電)を行うことが出来る。
【0019】
本発明において、好ましくは、エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である。
このように構成された本発明においては、車両の発進時等の高出力が必要な場合に、モータに電力を有効に供給することが出来ると共に、車両の一定速走行時又は慣性走行時に必要な電力を有効に供給することが出来る。
【発明の効果】
【0020】
本発明によるハイブリッド電源式電動車両によれば、加速状態が一定時間以上続く場合においても、モータ出力の低下を起こすことなく、効果的に要求出力を所定時間維持することが出来る。
【図面の簡単な説明】
【0021】
【図1】電動車両の車速Vと時間tとの関係を示す線図である。
【図2】従来技術による電動車両の電動機の総出力Pm(図2(a))、エネルギ電池の出力Pe(図2(b))、パワー電池の出力Pp(図2(c))と時間tとの関係を示す線図である。
【図3】本発明の実施形態によるハイブリッド電源式電動車両のハイブリッド電源システムの構成を示すブロック図である。
【図4】電動車両に用いられるハイブリッド電源のリチウムイオン電池のパワー密度とエネルギ密度との関係を示す概念図である。
【図5】本発明の実施形態によるハイブリッド電源式電動車両のエネルギ電源(図5(a))及びパワー電源(図5(b))における最大出力密度と出力持続時間との関係を充電状態に応じて示す線図である。
【図6】本発明の実施形態による電動車両のモータの発熱量に基づいて定められたモータ定格出力時間tとモータ定格出力pとの関係を示す線図である。
【図7】本発明の実施形態による電動車両の車速Vと時間tとの関係の一例を示す線図である。
【図8】本発明の実施形態による電動車両のアクセル開度(図8(a))及びモータの要求総出力Pm(図8(b))と時間tとの関係の一例を示す線図である。
【図9】本発明の実施形態による電動車両の制御機により行われるハイブリッド電源の制御内容を示すフローチャートである。
【図10】本発明の実施形態による電動車両のモータの要求総出力Pmとアクセル開度aとの関係を、アクセル開速度avに応じて示す線図である。
【図11】本発明の実施形態による電動車両の要求エネルギ電源出力Pe(図11(a))及び要求パワー電源出力Pp(図11(b))と時間tとの関係の一例を示す線図である。
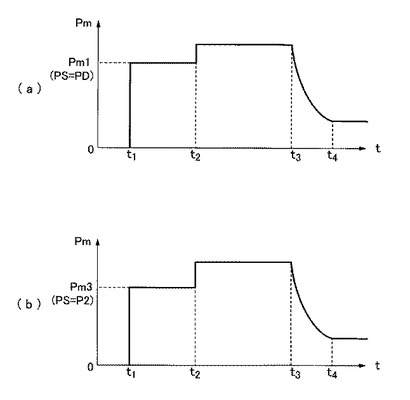
【図12】本発明の実施形態による電動車両の通常時の総出力Pm(図12(a))及び制限時の総出力Pm(図12(b))と時間tとの関係を示す線図である。
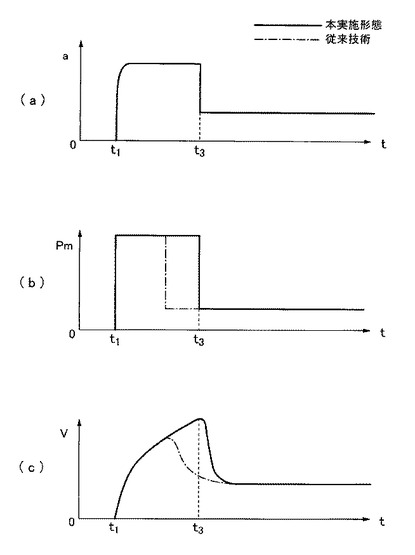
【図13】本発明の実施形態による電動車両におけるアクセル開度(図13(a))、出力される総出力Pm(図13(b))及び車速V(図13(c))と時間tとの関係の他の例を示す線図である。
【発明を実施するための形態】
【0022】
以下、添付図面を参照して、本発明の実施形態によるハイブリッド電源式電動車両を説明する。
先ず、図3乃至図5により、本発明の実施形態によるハイブリッド電源式電動車両に適用されるハイブリッド電源システムの概略構成を説明する。図3は、本発明の実施形態によるハイブリッド電源式電動車両のハイブリッド電源システムの構成を示すブロック図であり、図4は、電動車両に用いられるハイブリッド電源のリチウムイオン電池のパワー密度とエネルギ密度との関係を示す概念図であり、図5は、本発明の実施形態によるハイブリッド電源式電動車両のエネルギ電源(図5(a))及びパワー電源(図5(b))における最大出力密度と出力持続時間との関係を充電状態に応じて示す線図である。
【0023】
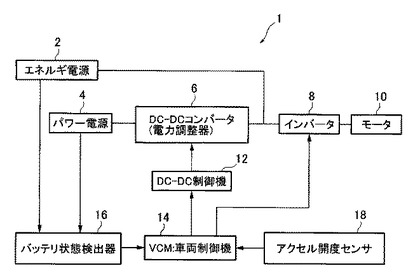
図3に示すように、ハイブリッド電源式電動車両1は、そのハイブリッド電源システムとして、エネルギ電源(E電池)2及びパワー電源(P電池)4を備える。本実施形態では、エネルギ電源2及びパワー電源4として、それぞれリチウムイオン(Li−ion)電池が用いられる。ここで、図4に示すように、リチウムイオン電池には、大きく分けて、HEV(ハイブリッド)用の高パワー密度/低エネルギ密度型、PHEV(プラグインハイブリッド)用の中パワー密度/中エネルギ密度型、EV用の低パワー密度/高エネルギ密度型があり、それぞれEV走行が可能な車両に搭載される。本実施形態では、エネルギ電源2として、低パワー密度/高エネルギ密度型(低出力高密度型)のリチウムイオン電池を、パワー電源4として、高パワー密度/低エネルギ密度型(高出力低密度型)のリチウムイオン電池をそれぞれ用いる。
【0024】
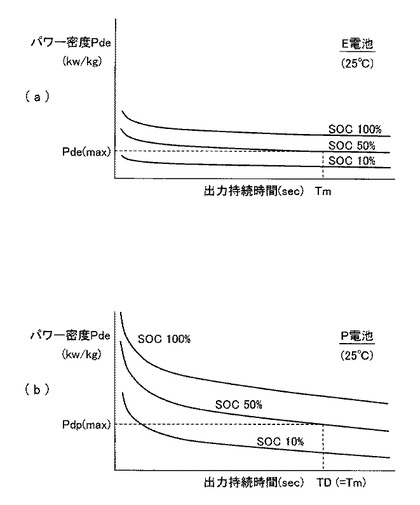
次に、図5(a)及び図5(b)に示すように、エネルギ電源2及びパワー電源4は、いずれも、最大出力密度と出力持続時間との関係を有する。図5(a)及び図5(b)に示すように、この関係は、SOC(State of Charge)で表される充電状態、即ち、充電容量に対する充電残量の比率によって変化する。
例えば、エネルギ電源2の場合、図5(a)に示すように、SOC50%であるとすると、要求されるパワー密度がPdemaxであるとき、その出力での出力持続時間はTmとなる。言い換えれば、後述するように、要求される出力持続時間(最大出力時間)がTmであれば、その時間、持続可能な最大出力密度はPdemaxとなる。
パワー電源4の場合も同様に、要求されるパワー密度がPdp(TD)であるとき、その出力での出力持続時間はTDとなる。言い換えれば、要求される出力持続時間(最大出力時間)がTDであれば、その時間、持続可能な最大出力密度はPdemaxとなる。
【0025】
得られる出力は、例えば、パワー密度Pde、Pdpに、それぞれ、エネルギ電源2、パワー電源4の搭載重量を乗算したものになる。また、図5(a)及び図5(b)を比較して分かるように、同じOSCの場合、エネルギ電源2の方が、パワー電源4よりも、最大出力密度が低い。
なお、図5に示すようなマップは、エネルギ電源2及びパワー電源4とも、温度毎(例えば、5℃毎)に規定されている(図示せず)。
【0026】
次に、図3に示すように、ハイブリッド電源式電動車両1は、DC−DCコンバータ(電力調整器)6、インバータ8、モータ(電動機)10及びDC−DC制御器12を備える。
エネルギ電源2及びパワー電源4は、並列にインバータ8に接続されている。DC−DCコンバータ6は、DC−DC制御器12により制御され、各電源2、4の電圧を調整する。即ち、DC−DCコンバータ6は、この電圧調整により、各電源2、4からモータ10に供給されるそれぞれの出力電力を調整する。インバータ8は、直流電流を、周波数を制御した交流電流に変換し、モータ10を作動させる。
【0027】
次に、図3に示すように、DC−DC制御器12及びインバータ8には、VCM(車両制御機)14が接続されている。VCM14は、後述するモータ10の要求総出力、エネルギ電源2の要求出力、パワー電源4の要求出力等に応じて、DC−DC制御器12及びインバータ8を制御する。
このVCM14には、エネルギ電源2及びパワー電源4の状態を検出するバッテリ状態検出器16が接続され、上述したエネルギ電源2及びパワー電源4の各SOC及び各温度に関する信号が入力される。
また、VCM14には、アクセル開度センサ18が接続され、運転者のアクセル操作によるアクセル開度に関する信号が入力される。このVCM14では、アクセル開度の信号から、アクセル開速度、即ち、運転者がアクセルを踏み込む速度を算出する。
【0028】
次に、図6により、本発明の実施形態によるハイブリッド電源式電動車両に適用されるモータ10の定格出力特性を説明する。図6は、本発明の実施形態による電動車両のモータの発熱量に基づいて定められたモータ定格出力時間とモータ定格出力との関係を示す線図である。
図6に示すように、モータ定格出力時間tとモータ定格出力pとの関係は、モータ10の発熱及びその冷却性能により予め規定され、そのデータは、VCM14の記憶装置に記憶されている。
ここで、モータ定格出力時間tとモータ定格出力pとの関係の前提事項を説明する。
短時間定格出力Pでの出力時には、モータの発熱量は、(P/V)2Rと表される。Vはモータ作動電圧であり、Rはモータの内部抵抗である。
一方、連続定格出力(1/2)Pでの出力時には、モータの発熱量は、(P/2V)2Rと表される。この発熱量(P/2V)2Rは、モータの冷却システムで放熱が前提となる。即ち、連続定格出力時間=無限である。
そして、(P/V)2R=4Uとすると、(P/2V)2R=Uとなる。このUの分の熱量は冷却除熱可能であるので、短時間定格出力時間をTとすると、短時間定格出力時の発熱量は3UTとなる。この3UTがモータの許容発熱量を超えると出力低下を起こす。
このような許容発熱量を考慮して得られるモータ定格出力時間tとモータ定格出力pとの関係が図6に示すようなものとなるのである。
図6に示すように、いわゆる連続定格出力は、いわゆる短時間定格出力Pの1/2(=1/2×P)となり、短時間定格出力Pの出力時間Tはおよそ30秒である。
【0029】
次に、図7乃至図9により、本発明の実施形態によるハイブリッド電源式電動車両の制御内容を説明する。図7は、本発明の実施形態による電動車両の車速Vと時間tとの関係の一例を示す線図であり、図8は、本発明の実施形態による電動車両のアクセル開度(図8(a))及びモータの要求総出力Pm(図8(b))と時間tとの関係の一例を示す線図であり、図9は、本発明の実施形態による電動車両の制御機により行われるハイブリッド電源の制御内容を示すフローチャートである。
【0030】
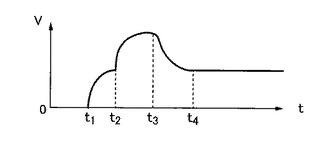
先ず、本実施形態の制御内容を説明するにあたり、図7に示すような走行パターンを想定する。図7に示すような走行パターンでは、時刻t1からt2までの、車速=0の状態からの加速時(第1の加速時)と、その後、アクセル開度が一定(アクセル開速度=0)の状態から再度アクセルを踏み込んだときの時刻t2からt3までの再加速時(第2の加速時)と、時刻t3からt4までの減速時と、時刻t4以降の一定速走行時と、に分けられる。即ち、車両が、先ず、車速=0の状態から時刻t1で加速を開始した後、時刻t2にはその加速を終了し、時刻t2において再び加速を開始した後、時刻t3にはその加速を終了する。そして、車両は、時刻t3に減速を開始し、時刻t4にその減速を終了すると共に一定速走行に移行する。
【0031】
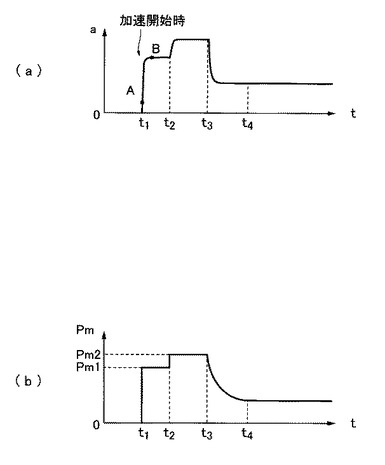
次に、図8(a)に、図7に示すような走行パターンを得るためのアクセル開度を示す。図8(a)に示すように、時刻t1において、運転者によるアクセルの踏み込みが開始され、その後、時刻t2に至るまでの間にアクセル開度が一定に保たれる。そして、時刻t2において、再び、アクセルの踏み込みが開始され、その後、時刻t2に至るまでの間にアクセル開度が一定に保たれる。そして、時刻t3において、アクセルが戻され、一定のアクセル開度に保たれる。
【0032】
次に、図8(b)に、図7に示すような走行パターンを得るためのモータ10の要求総出力を示す。図8(b)に示すように、モータ10の要求総出力は、時刻t1からt2に至るまでの間では、加速に必要な一定値Pm1となり、時刻t2からt3に至るまでの間では、加速に必要な一定値Pm2となる。これらの値Pm1、Pm2は、後述するように、アクセル開度及びアクセル開速度により決定される。そして、モータ10の要求総出力は、時刻t3から時刻t4に至るまでの減速時には、減速度合いに応じて減少し、時刻t4以降の一定速走行時には、一定速度を保つための一定値となる。
【0033】
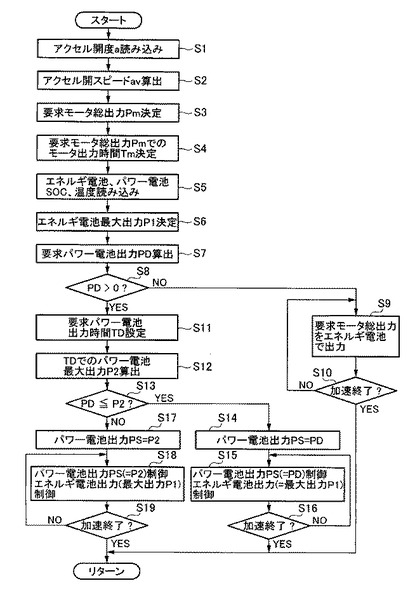
次に、主に図9により、VCM14(図3参照)で実行される制御フローを説明する。
図9は、加速時における制御内容であり、以下では、図8(a)の時刻t1からt2に至るまでの加速時を例として説明する。なお、時刻t2からt3までの再加速時も同様の制御であるので、以下では、その説明を省略する。図9において、Sは各ステップを示す。
本実施形態では、VCM14が、アクセル開度センサ18から入力されるアクセル開度aの信号に基づき、(1)アクセル開度a>0、(2)アクセル開速度av>0の2つの条件を満たした時に、加速開始と判定して、図9による加速時の制御を実行する。なお、アクセル開速度avは、アクセルを開く方向での速度をプラス(+)、閉じる方向での速度をマイナス(−)とする。なお、時刻t2からの再加速時には、アクセル開速度avが、0からプラスに変化するので、その時を、加速開始時と判定する。
【0034】
先ず、S1において、アクセル開度センサ18(図3参照)により検出されたアクセル開度aを表す信号を読み込む。次に、S2において、S1で読み込んだアクセル開度から、加速開始時のアクセル開速度avを算出する。具体的には、このS2では、加速開始時、例えば図8(a)のA点で示すような所定のアクセル開度に至るまでの時間と、その所定のアクセル開度とから、アクセル開速度avを算出する。
【0035】
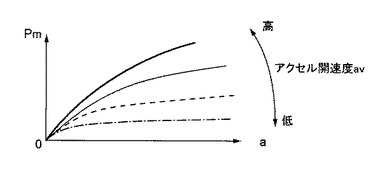
次に、S3において、加速時におけるモータ10の要求総出力Pmを、加速開始時に決定する。このS3においては、図10に示すようなマップを用いて要求総出力Pmを決定する。
ここで、図10には、加速時にモータ10に要求される総出力Pmとアクセル開度との関係が、アクセル開速度avが高い場合(所定のアクセル開度に至るまでの時間が短い場合)、アクセル開速度avが低い場合(所定のアクセル開度に至るまでの時間が長い場合)に応じてマップ化されて規定されている。
S3では、図10のマップに基づいて、S1で読み込んだアクセル開度aと、S2で算出したアクセル開速度avとから、加速時のモータ10の要求総出力Pmを決定する。より詳細には、図10に示すマップにおいて用いるアクセル開度aは、例えば図8(a)のB点で示すようなアクセル開度aが一定になったときのアクセル開度aを用いる。又は、加速開始時のプラスのアクセル開速度avとなっている間に、そのアクセル開速度avの変化量に基づいて運転者が要求するアクセル開度aを推定し、この推定したアクセル開度を用いても良い。
【0036】
なお、アクセル開速度avが所定値以下となる、緩やかなアクセル踏み込み操作における加速時(緩加速時)おいては、要求モータ総出力Pmをアクセル開度aに連動させ、且つ、エネルギ電源2のみから出力する。このような緩加速時においては、要求モータ総出力Pmは小さいので、パワー電源4から出力を補わなくても、エネルギ不足で運転者に違和感を与えることはない。
【0037】
次に、S4において、S3で決定した要求モータ総出力Pmで持続可能なモータ出力時間Tmを、上述した図6に示すマップを用いて決定する。具体的には、図6に示すように、S3で決定した要求モータ総出力Pm=Pm1であるとき、モータ出力時間Tm=Tm1と決定される。このようにモータの許容発熱量を考慮して規定された図6に示す定格出力マップを用いてモータ出力時間を決定することにより、要求モータ総出力Pmでの、モータ10の出力が発熱により低下しない最大出力時間を決定する。
【0038】
次に、S5において、エネルギ電源2及びパワー電源4のSOC及び温度を読み込む。
次に、S6において、先ず、S4で決定したモータ出力時間Tmの間出力可能なエネルギ電池2の最大出力密度Pdemaxを、上述した図5(a)に示すマップを用いて決定する。具体的には、S5で読み込んだエネルギ電源2のSOC及び温度(ここでは、SOC=50%、温度=25℃であるものとする)に基づいて、図5(a)に示すように、S4で決定したモータ出力時間Tmから、エネルギ電源2の出力可能な最大パワー密度Pde=Pdemaxが決定される。
ここで、エネルギ電源2の最大出力P1は、以下の式(1)により算出される。
エネルギ電源最大出力P1[W]=最大パワー密度Pdemax[W/kg]×エネルギ電源搭載重量[kg]・・・式(1)
即ち、このS6では、図5(a)により決定した最大パワー密度Pdemaxに、車両に搭載されるエネルギ電源の総重量を掛けて、エネルギ電源2の最大出力P1を算出する。
【0039】
次に、S7において、パワー電源4に要求される出力PDを、以下の式(2)により算出する。
要求パワー電源出力PD[W]=要求モータ総出力Pm[W]−エネルギ電池最大出力P1[W]・・・式(2)
即ち、S3で決定した要求モータ総出力Pmの値から、S6で算出されたエネルギ電池最大出力P1を引いて、要求パワー電源出力PDを算出する。
【0040】
次に、S8において、要求パワー電源出力PDが0より大きいか否かを判定する。
要求パワー電源出力PDが0以下(PD≦0)のとき、S9に進み、要求モータ総出力Pmがエネルギ電源2のみからモータ10に供給されるよう、電力調整器6を制御して、モータ10の要求出力Pmを得る。PD=0の場合、エネルギ電源2の出力電力(エネルギ電源2からモータ10に供給される電力)は、S6で決定したエネルギ電池4の最大出力P1となり、PD<0の場合、エネルギ電源2の出力は、その最大出力P1より小さい出力となる。
このS9の処理は、S10の判定により加速終了時(図7の時刻t2参照)まで行われる。S10においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
この場合、エネルギ電源2の出力電力のみで要求モータ総出力Pmを供給することが出来、また、S4においてモータの許容発熱量を考慮した最大出力時間Tmを設定しているので、加速時において、パワー電源4のエネルギを消費することなく、効果的に要求モータ総出力Pmを維持することが出来る。
【0041】
一方、S8において、要求パワー電源出力PDが0を超える値のとき、S11に進み、S7で算出した要求パワー電源出力PDの出力時間TDを設定する。このS11では、S4で決定されたモータ出力時間Tmを、要求パワー電源出力時間TDとして設定する。
【0042】
次に、S12において、S11で設定した出力時間TD(=Tm)の間出力可能なパワー電池4の最大出力Pdpmaxを、上述した図5(b)に示すマップを用いて決定する。具体的には、S5で読み込んだパワー電源4のSOC及び温度(ここでは、SOC=50%、温度=25℃であるものとする)に基づいて、図5(b)に示すように、S11で設定した要求パワー電源出力時間TD(=Tm)から、パワー電源4の出力可能な最大パワー密度Pdp=Pdpmaxが決定される。
ここで、パワー電源4の最大出力P2は、以下の式(3)により算出される。
パワー電源最大出力P2[W]=最大パワー密度Pdpmax[W/kg]×パワー電源搭載重量[kg]・・・式(3)
即ち、このS12では、パワー電源4の最大出力P2を、図5(b)により決定した最大パワー密度Pdpmaxに、車両に搭載されるパワー電源の総重量を掛けて算出する。
【0043】
次に、S13において、S7で算出された要求パワー電源出力PDが、S12で算出された最大出力P2以下であるか否かを判定する。
要求パワー電源出力PDが最大出力P2以下のとき、S14に進み、パワー電池4の出力PSを要求パワー電源出力PDとする。
次に、S15において、エネルギ電源2からその最大出力P1(S6参照)がモータ10に供給され、且つ、パワー電源4から要求パワー電源出力PDがモータ10に供給されるよう、電力調整器6を制御して、モータ10の要求出力Pmを得る。
このS15の処理は、S16の判定により加速終了時(図7の時刻t2参照)まで行われる。S16においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
【0044】
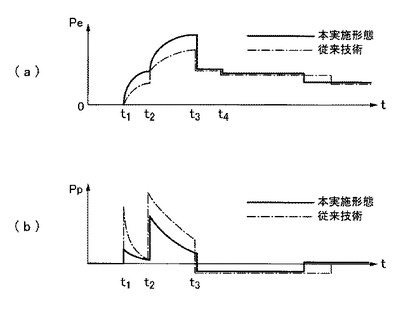
ここで、図11は、本発明の実施形態による電動車両の要求エネルギ電源出力Pe(図11(a))及び要求パワー電源出力Pp(図11(b))と時間tとの関係の一例を示す線図である。この図11では、本実施形態における要求出力Pe、Ppを実線で、比較例として、従来技術(特開平8−33120号公報)による要求出力を一点鎖線で示す。
図11の時刻t1〜t2、及び、時刻t2〜t3における線図に示すように、本実施形態では、エネルギ電源2の出力を最大にしているので、エネルギ電源からの出力が従来技術より大きく、一方、パワー電源4の出力を、エネルギ電源2の出力で不足する電力を補うようにしているので、パワー電源からの出力が従来技術より小さくなる。
従って、本実施形態では、例えば、図8の時刻t2〜t3に示すようなさらなる加速時において、上述した従来技術(図2参照)のような、パワー電源のエネルギ供給不足に起因した、モータの出力低下を抑制することが出来る。
このように、本実施形態では、エネルギ電源2の出力電力(=最大出力P1)で不足する電力(要求パワー電源出力PD)をパワー電源4で補うので、再加速時等に、パワー電源4の容量が不足してしまうことを効果的に抑制しつつ、有効に要求モータ総出力Pmを得ることが出来る。また、S4においてモータの許容発熱量を考慮した最大出力時間Tmを設定しているので、加速時において、効果的に要求モータ総出力Pmを維持することが出来る。
【0045】
一方、S13において、要求パワー電源出力PDが最大出力P2を超えると判定されたとき、S17に進み、パワー電池4の要求出力PSを最大出力P2に制限する。
次に、S18において、エネルギ電源2から、その最大出力P1(S6参照)がモータ10に供給され、且つ、パワー電源4から、制限された出力P2がモータ10に供給されるよう、電力調整器6を制御する。
このS18の処理は、S19の判定により加速終了時(図7の時刻t2参照)まで行われる。S19においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
【0046】
ここで、図12は、本発明の実施形態による電動車両の通常時の総出力Pm(図12(a))及び制限時の総出力Pm(図12(b))と時間tとの関係を示す線図である。ここで、通常時とは、上述したS9又はS15による出力制御が実行されるときであり、制限時とは、S18による出力制御が実行されるときである。
図12に示すように、モータ10の総出力は、パワー電源4の出力を要求出力PDからP2に制限した分、Pm1からPm2に出力制限される。
このような出力制限処理は、例えば、パワー電源4の劣化等に起因して極端にその出力密度(図5(b)参照)が低下した場合等に有効である。本実施形態では、このような場合、モータ10の総出力に制限をかける一方、その制限出力を最大出力時間Tm出力するようにしているので、加速時に、運転者に与える違和感を小さく抑えながら、効果的に一定のモータ総出力を維持することが出来る。
【0047】
次に、図13により、時刻t1からt3にかけて加速が長時間続く場合の例を説明する。図13は、本発明の実施形態による電動車両におけるアクセル開度(図13(a))、出力される総出力Pm(図13(b))及び車速V(図13(c))と時間tとの関係の他の例を示す線図である。
本実施形態では、図13(a)に示すようなアクセル開度要求が入力された場合、上述した制御フロー(図9)により、図13(b)の実線で示すように、モータ10の総出力Pmが得られ、図13(c)の実線で示すような車速Vが得られる。一方、一点鎖線で示すような従来技術では、図13(b)に示すようにモータの出力が低下し、そのような出力低下により、図13(c)に示すように車速が低下する場合がある。本実施形態では、このようなモータの出力低下を抑制することが出来る。
【0048】
なお、本実施形態では、時刻t3から時刻t4までの減速時(図7及び図8参照)には、エネルギ電源2は、基本的にパワー電源4への充電電力を出力し、また、減速に必要な電力を出力する。時刻t4以降の一定速走行時には、エネルギ電源2は、減速時に充電しきれなかったパワー電源4への充電電力分を出力し、また、一定速走行に必要な電力を出力する。
【0049】
なお、本実施形態では、エネルギ電源2及びパワー電源4として、それぞれリチウムイオン電池を用いたが、エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源であっても良く、また、パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源であっても良い。
【符号の説明】
【0050】
2 エネルギ電源(エネルギ電池)
4 パワー電源(パワー電池)
6 DC−DCコンバータ(電力調整器)
10 モータ(電動機)
14 車両制御器(電力調整器の制御手段、電動機要求出力決定手段、出力時間設定手段、電源要求出力設定手段、エネルギ電源/パワー電源出力可能電力決定手段)
16 バッテリ状態検出器(エネルギ電源/パワー電源残量検出手段)
【技術分野】
【0001】
本発明は、ハイブリッド電源式電動車両に係り、特に、低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両に関する。
【背景技術】
【0002】
特許文献1及び2には、エネルギ電池とパワー電池とを組み合わせたバッテリハイブリッド電源及びその負荷電流制御装置が開示されている。
特許文献1に開示された技術では、エネルギ電源からの出力電流を一定値以下に制限するので、加速状態が連続する場合や加速頻度が高い場合等に、パワー電池からの電力放出量が大きくなり、エネルギ電池からの充電が間に合わずに加速時にパワー電池の容量が不足する、という問題がある。
また、特許文献2に開示された技術では、車両の走行状況を考慮せずに一定の制御を行っているので、加速状態が連続する場合や加速頻度が高い場合等に、パワー電池の容量が不足し、十分な加速ができなくなる、という問題がある。
【0003】
従来、このような問題を解決するために、特許文献3に開示された技術では、加速状態が連続する場合や加速頻度が高い場合等の走行状況を考慮した電力制御が提案されている。この特許文献3の電力制御では、走行状況を表すパラメータに基づいて充電電力、出力電力を算出し、要求される負荷電力が大きい場合、パワー電池から車両駆動用モータに電力を供給し、また、要求される負荷電力が大きく且つ所定加速度以上の状態が所定時間以上継続した場合、エネルギ電池から供給される電力量を増加し且つパワー電池から供給される電力量を減少するよう制御している。
【0004】
この特許文献3の技術では、例えば、図1のパターン1で示すような走行状態における時刻t1からt2の間の加速時に、図2に実線で示すように、エネルギ電池から所定の電力がモータに供給されると共にパワー電池から所定の電力がモータに供給される。そして、時刻t2からt3の間の定常走行時に、エネルギ電池から、定常走行に必要な電力がモータに供給されると共にパワー電池を充電するための電力が出力される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭50−153227号公報
【特許文献2】特開昭50−153228号公報
【特許文献3】特開平8−33120号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献3に記載のエネルギ電池とパワー電池の各々の出力電力制御は、加速度と加速連続時間との関数で決定される値のみに基づいたものであるので、要求モータ出力と実際に得られるモータ出力との間に差が出る場合があることが問題となる。即ち、例えば、要求されるパワー電池の電力供給量に対する出力可能時間が考慮されていないので、加速状態が一定時間以上続く場合等に、パワー電池の容量が不足してしまう、という問題が生じる。
【0007】
例えば、特許文献3の技術では、図1のパターン2で示すように、時刻t1からt2の間の加速の後、時刻t2からt3にかけてさらに加速をするような場合、図2(a)及び図2(b)に一点鎖線で示すような出力がそれぞれエネルギ電池及びパワー電池に要求される。しかしながら、パワー電池の容量は、時刻t1からt2の間に所定量減少しており、時刻t2からt3にかけてのさらなる加速時に、図2(c)に二点鎖線で示すように、パワー電池のエネルギ不足が生じることが懸念される。このようなエネルギ供給不足が生じると、図2(a)に二点鎖線で示すように、モータに供給されるトータル電力(総要求電力Pm)が不足し、モータの出力が低下する。このようなパワー電池の容量不足による出力低下は、運転者が意図しないものであり、違和感を与える可能性が高い。
【0008】
本発明は、上述した問題点を解決するためになされたものであり、加速状態が一定時間以上続く場合においても、モータ出力の低下を起こすことなく、効果的に要求出力を所定時間維持することが出来るハイブリッド電源式電動車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の目的を達成するために本発明は、低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両であって、エネルギ電源及びパワー電源から電動機に供給される電力を調整する電力調整器と、電動車両の加速時における電動機の要求出力を加速開始時に決定する電動機要求出力決定手段と、決定された電動機の要求出力の所定の最大出力時間を設定する出力時間設定手段と、所定の最大出力時間の間、エネルギ電源の出力電力を、電動機の要求出力に対して出力可能な最大の電力に設定し、パワー電源の出力電力を、電動機の要求出力に対してエネルギ電源の出力電力を補う電力に設定する電源要求出力設定手段と、電動車両の加速時、電源要求出力設定手段により設定されたエネルギ電源の出力電力及びパワー電源の出力電力が得られるよう、電力調整器を制御する制御手段と、を有することを特徴としている。
このように構成された本発明においては、加速開始時に、電動車両の加速時における電動機の要求出力が決定され、この電動機の要求出力の所定の最大出力時間が決定され、この所定の最大出力時間の間、エネルギ電源の出力電力が、電動機の要求出力に対して出力可能な最大の電力に設定され、パワー電源の出力電力が、電動機の要求出力に対してエネルギ電源の出力電力を補う電力に設定され、加速時、それらの設定された電力がエネルギ電源及びパワー電源からそれぞれ電動機に供給されるので、車両の加速が一定時間以上続く場合においても、少なくとも決定された最大出力時間の間、パワー電源の容量不足(充電不足)に起因する電動機の出力低下が発生することを抑制することが出来、それにより、運転者に違和感を与えることなく、効果的に、要求されるモータ出力を高出力要求通り維持することが出来る。
【0010】
本発明において、好ましくは、電源要求出力設定手段は、電動機の要求出力が、エネルギ電源の最大の出力電力より小さい場合、エネルギ電源のみから上記電動機に電力を供給するよう設定する。
このように構成された本発明においては、加速時に、パワー電源の容量(残量)をより温存することが出来る。
【0011】
本発明において、好ましくは、さらに、電動車両のアクセルのアクセル開度を検出するアクセル開度センサと、この検出されたアクセル開度からアクセル開速度を算出するアクセル開速度算出手段と、加速開始時における電動機の出力とアクセル開度との関係をアクセル開速度に応じて規定した電動機出力決定マップと、を有し、電動機要求出力決定手段は、電動機出力決定マップに基づいて、検出されたアクセル開度及び算出されたアクセル開速度から電動機の要求出力を決定する。
このように構成された本発明においては、加速開始時、運転者の意図に沿った電動機の要求出力を得ることが出来る。また、上述した電源要求出力設定手段及び制御手段により、加速時、このようなモータ要求出力が維持されるので、より確実に、運転者に違和感を与えることを防止することが出来る。
【0012】
本発明において、好ましくは、さらに、電動機の定格出力時間と定格出力との関係を規定した電動機定格出力マップを有し、出力時間設定手段は、この電動機定格出力マップにおいて、定格出力を電動機の要求出力とし、電動機定格出力マップに基づいて、電動機の要求出力を持続可能な定格出力時間の最大値を算出し、この算出された定格出力時間の最大値を電動機の要求出力の最大出力時間として設定する。
このように構成された本発明においては、電動機の定格出力時間と定格出力との関係に基づいて、電動機の性能を最大限引き出した最大の出力時間を設定することが出来る。これにより、最大出力時間の間、要求される電動機出力が維持されるので、加速状態が一定時間以上続く場合にも、より効果的に、要求通りの出力を得ることが出来る。
【0013】
本発明において、好ましくは、電動機の定格出力と定格出力時間との関係は、電動機の許容発熱量に基づいて規定される。
このように構成された本発明においては、電動機の許容発熱量より大きな発熱が生じることを防止することが出来るので、電動機の出力低下が生じることを防止することが出来る。従って、より確実に、要求通りに出力を維持することが出来る。
【0014】
本発明において、好ましくは、さらに、エネルギ電源のエネルギ容量の残量を検出するエネルギ電源残量検出手段と、エネルギ電源の出力密度、出力持続時間の関係をエネルギ電源のエネルギ残量に応じて規定したエネルギ電源SOCマップと、このエネルギ電源SOCマップにおいて、その出力持続時間を電動機の要求出力の最大出力時間とし、エネルギ電源SOCマップに基づいて、最大出力時間とした出力持続時間及び検出されたエネルギ電源のエネルギ残量からエネルギ電源の出力可能な出力密度を算出し、この算出された出力密度及びエネルギ電源の搭載重量に基づいて、エネルギ電源の出力可能な電力を決定するエネルギ電源出力可能電力決定手段と、を有し、電源要求出力設定手段は、この決定された出力可能な電力をエネルギ電源の最大の電力として設定する。
このように構成された本発明においては、エネルギ電源のエネルギ残量、出力密度及び搭載重量に応じて、適切に、エネルギ電源の出力可能な最大の電力を設定することが出来ると共に、エネルギ電源に要求される出力電力を安定して出力させることが出来る。
【0015】
本発明において、好ましくは、さらに、パワー電源のエネルギ容量の残量を検出するパワー電源残量検出手段と、パワー電源の出力密度、出力持続時間の関係をパワー電源のエネルギ残量に応じて規定したパワー電源SOCマップと、このパワー電源SOCマップにおいて、その出力持続時間を電動機の要求出力の最大出力時間とし、パワー電源SOCマップに基づいて、最大出力時間とした出力持続時間及び検出されたパワー電源のエネルギ残量からパワー電源の出力可能な出力密度を算出し、この算出された出力密度及びパワー電源の搭載重量に基づいて、パワー電源の出力可能な電力を決定するパワー電源出力可能電力決定手段と、を有する。
このように構成された本発明においては、パワー電源のエネルギ残量(充電量)、出力密度及び搭載重量に応じて、適切に、パワー電源からモータへの出力電力を設定することが出来ると共に、パワー電源に要求される出力電力を安定して出力させることが出来る。
【0016】
本発明において、好ましくは、電源要求出力設定手段は、電源要求出力設定手段により設定されたパワー電源の出力電力が、パワー電源出力可能電力決定手段により決定された出力可能な電力より大きい場合、パワー電源の出力電力を決定された出力可能な電力に設定する。
このように構成された本発明においては、パワー電源の劣化等に伴いパワー電源の出力密度が極端に低下するような場合であっても、パワー電源のエネルギ残量等に応じて出力制限をかけ、その制限された出力電力が、上述した電源要求出力設定手段及び制御手段により電動機の要求出力の最大出力時間の間維持される。このように、加速時、あえて出力を一定に制限する代わりに、その制限された出力電力を最大出力時間、一定に維持することが出来、これにより、加速時に運転者の意図に反した大幅な速度低下が生じるようなことを防止して、運転者に与える違和感を少なく抑えることが出来る。
【0017】
本発明において、好ましくは、パワー電源及びエネルギ電源は、いずれもリチウムイオン電池である。
このように構成された本発明においては、高エネルギ/低パワー型(エネルギ電源)と高パワー/低エネルギ型(パワー電源)の互いのエネルギ容量性能及びパワー性能差が比較的小さいリチウムイオン電池を用いる。ここで、一般的に、エネルギ電源の最大パワーの出力時間内における出力変動はパワー電源より小さく、また、エネルギ電源は、通常、パワー電源より多く積載されるので、このようなエネルギ電源のパワー性能をより大きなものに確保することが出来る。これにより、加速状態が一定時間以上続く場合にも、より確実に、電動機出力を要求通り維持することが出来る。
【0018】
本発明において、好ましくは、パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である。
このように構成された本発明においては、車両の発進時等の高出力が必要な場合に、モータに電力を有効に供給することが出来ると共に、制動時には電力の吸収(充電)を行うことが出来る。
【0019】
本発明において、好ましくは、エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である。
このように構成された本発明においては、車両の発進時等の高出力が必要な場合に、モータに電力を有効に供給することが出来ると共に、車両の一定速走行時又は慣性走行時に必要な電力を有効に供給することが出来る。
【発明の効果】
【0020】
本発明によるハイブリッド電源式電動車両によれば、加速状態が一定時間以上続く場合においても、モータ出力の低下を起こすことなく、効果的に要求出力を所定時間維持することが出来る。
【図面の簡単な説明】
【0021】
【図1】電動車両の車速Vと時間tとの関係を示す線図である。
【図2】従来技術による電動車両の電動機の総出力Pm(図2(a))、エネルギ電池の出力Pe(図2(b))、パワー電池の出力Pp(図2(c))と時間tとの関係を示す線図である。
【図3】本発明の実施形態によるハイブリッド電源式電動車両のハイブリッド電源システムの構成を示すブロック図である。
【図4】電動車両に用いられるハイブリッド電源のリチウムイオン電池のパワー密度とエネルギ密度との関係を示す概念図である。
【図5】本発明の実施形態によるハイブリッド電源式電動車両のエネルギ電源(図5(a))及びパワー電源(図5(b))における最大出力密度と出力持続時間との関係を充電状態に応じて示す線図である。
【図6】本発明の実施形態による電動車両のモータの発熱量に基づいて定められたモータ定格出力時間tとモータ定格出力pとの関係を示す線図である。
【図7】本発明の実施形態による電動車両の車速Vと時間tとの関係の一例を示す線図である。
【図8】本発明の実施形態による電動車両のアクセル開度(図8(a))及びモータの要求総出力Pm(図8(b))と時間tとの関係の一例を示す線図である。
【図9】本発明の実施形態による電動車両の制御機により行われるハイブリッド電源の制御内容を示すフローチャートである。
【図10】本発明の実施形態による電動車両のモータの要求総出力Pmとアクセル開度aとの関係を、アクセル開速度avに応じて示す線図である。
【図11】本発明の実施形態による電動車両の要求エネルギ電源出力Pe(図11(a))及び要求パワー電源出力Pp(図11(b))と時間tとの関係の一例を示す線図である。
【図12】本発明の実施形態による電動車両の通常時の総出力Pm(図12(a))及び制限時の総出力Pm(図12(b))と時間tとの関係を示す線図である。
【図13】本発明の実施形態による電動車両におけるアクセル開度(図13(a))、出力される総出力Pm(図13(b))及び車速V(図13(c))と時間tとの関係の他の例を示す線図である。
【発明を実施するための形態】
【0022】
以下、添付図面を参照して、本発明の実施形態によるハイブリッド電源式電動車両を説明する。
先ず、図3乃至図5により、本発明の実施形態によるハイブリッド電源式電動車両に適用されるハイブリッド電源システムの概略構成を説明する。図3は、本発明の実施形態によるハイブリッド電源式電動車両のハイブリッド電源システムの構成を示すブロック図であり、図4は、電動車両に用いられるハイブリッド電源のリチウムイオン電池のパワー密度とエネルギ密度との関係を示す概念図であり、図5は、本発明の実施形態によるハイブリッド電源式電動車両のエネルギ電源(図5(a))及びパワー電源(図5(b))における最大出力密度と出力持続時間との関係を充電状態に応じて示す線図である。
【0023】
図3に示すように、ハイブリッド電源式電動車両1は、そのハイブリッド電源システムとして、エネルギ電源(E電池)2及びパワー電源(P電池)4を備える。本実施形態では、エネルギ電源2及びパワー電源4として、それぞれリチウムイオン(Li−ion)電池が用いられる。ここで、図4に示すように、リチウムイオン電池には、大きく分けて、HEV(ハイブリッド)用の高パワー密度/低エネルギ密度型、PHEV(プラグインハイブリッド)用の中パワー密度/中エネルギ密度型、EV用の低パワー密度/高エネルギ密度型があり、それぞれEV走行が可能な車両に搭載される。本実施形態では、エネルギ電源2として、低パワー密度/高エネルギ密度型(低出力高密度型)のリチウムイオン電池を、パワー電源4として、高パワー密度/低エネルギ密度型(高出力低密度型)のリチウムイオン電池をそれぞれ用いる。
【0024】
次に、図5(a)及び図5(b)に示すように、エネルギ電源2及びパワー電源4は、いずれも、最大出力密度と出力持続時間との関係を有する。図5(a)及び図5(b)に示すように、この関係は、SOC(State of Charge)で表される充電状態、即ち、充電容量に対する充電残量の比率によって変化する。
例えば、エネルギ電源2の場合、図5(a)に示すように、SOC50%であるとすると、要求されるパワー密度がPdemaxであるとき、その出力での出力持続時間はTmとなる。言い換えれば、後述するように、要求される出力持続時間(最大出力時間)がTmであれば、その時間、持続可能な最大出力密度はPdemaxとなる。
パワー電源4の場合も同様に、要求されるパワー密度がPdp(TD)であるとき、その出力での出力持続時間はTDとなる。言い換えれば、要求される出力持続時間(最大出力時間)がTDであれば、その時間、持続可能な最大出力密度はPdemaxとなる。
【0025】
得られる出力は、例えば、パワー密度Pde、Pdpに、それぞれ、エネルギ電源2、パワー電源4の搭載重量を乗算したものになる。また、図5(a)及び図5(b)を比較して分かるように、同じOSCの場合、エネルギ電源2の方が、パワー電源4よりも、最大出力密度が低い。
なお、図5に示すようなマップは、エネルギ電源2及びパワー電源4とも、温度毎(例えば、5℃毎)に規定されている(図示せず)。
【0026】
次に、図3に示すように、ハイブリッド電源式電動車両1は、DC−DCコンバータ(電力調整器)6、インバータ8、モータ(電動機)10及びDC−DC制御器12を備える。
エネルギ電源2及びパワー電源4は、並列にインバータ8に接続されている。DC−DCコンバータ6は、DC−DC制御器12により制御され、各電源2、4の電圧を調整する。即ち、DC−DCコンバータ6は、この電圧調整により、各電源2、4からモータ10に供給されるそれぞれの出力電力を調整する。インバータ8は、直流電流を、周波数を制御した交流電流に変換し、モータ10を作動させる。
【0027】
次に、図3に示すように、DC−DC制御器12及びインバータ8には、VCM(車両制御機)14が接続されている。VCM14は、後述するモータ10の要求総出力、エネルギ電源2の要求出力、パワー電源4の要求出力等に応じて、DC−DC制御器12及びインバータ8を制御する。
このVCM14には、エネルギ電源2及びパワー電源4の状態を検出するバッテリ状態検出器16が接続され、上述したエネルギ電源2及びパワー電源4の各SOC及び各温度に関する信号が入力される。
また、VCM14には、アクセル開度センサ18が接続され、運転者のアクセル操作によるアクセル開度に関する信号が入力される。このVCM14では、アクセル開度の信号から、アクセル開速度、即ち、運転者がアクセルを踏み込む速度を算出する。
【0028】
次に、図6により、本発明の実施形態によるハイブリッド電源式電動車両に適用されるモータ10の定格出力特性を説明する。図6は、本発明の実施形態による電動車両のモータの発熱量に基づいて定められたモータ定格出力時間とモータ定格出力との関係を示す線図である。
図6に示すように、モータ定格出力時間tとモータ定格出力pとの関係は、モータ10の発熱及びその冷却性能により予め規定され、そのデータは、VCM14の記憶装置に記憶されている。
ここで、モータ定格出力時間tとモータ定格出力pとの関係の前提事項を説明する。
短時間定格出力Pでの出力時には、モータの発熱量は、(P/V)2Rと表される。Vはモータ作動電圧であり、Rはモータの内部抵抗である。
一方、連続定格出力(1/2)Pでの出力時には、モータの発熱量は、(P/2V)2Rと表される。この発熱量(P/2V)2Rは、モータの冷却システムで放熱が前提となる。即ち、連続定格出力時間=無限である。
そして、(P/V)2R=4Uとすると、(P/2V)2R=Uとなる。このUの分の熱量は冷却除熱可能であるので、短時間定格出力時間をTとすると、短時間定格出力時の発熱量は3UTとなる。この3UTがモータの許容発熱量を超えると出力低下を起こす。
このような許容発熱量を考慮して得られるモータ定格出力時間tとモータ定格出力pとの関係が図6に示すようなものとなるのである。
図6に示すように、いわゆる連続定格出力は、いわゆる短時間定格出力Pの1/2(=1/2×P)となり、短時間定格出力Pの出力時間Tはおよそ30秒である。
【0029】
次に、図7乃至図9により、本発明の実施形態によるハイブリッド電源式電動車両の制御内容を説明する。図7は、本発明の実施形態による電動車両の車速Vと時間tとの関係の一例を示す線図であり、図8は、本発明の実施形態による電動車両のアクセル開度(図8(a))及びモータの要求総出力Pm(図8(b))と時間tとの関係の一例を示す線図であり、図9は、本発明の実施形態による電動車両の制御機により行われるハイブリッド電源の制御内容を示すフローチャートである。
【0030】
先ず、本実施形態の制御内容を説明するにあたり、図7に示すような走行パターンを想定する。図7に示すような走行パターンでは、時刻t1からt2までの、車速=0の状態からの加速時(第1の加速時)と、その後、アクセル開度が一定(アクセル開速度=0)の状態から再度アクセルを踏み込んだときの時刻t2からt3までの再加速時(第2の加速時)と、時刻t3からt4までの減速時と、時刻t4以降の一定速走行時と、に分けられる。即ち、車両が、先ず、車速=0の状態から時刻t1で加速を開始した後、時刻t2にはその加速を終了し、時刻t2において再び加速を開始した後、時刻t3にはその加速を終了する。そして、車両は、時刻t3に減速を開始し、時刻t4にその減速を終了すると共に一定速走行に移行する。
【0031】
次に、図8(a)に、図7に示すような走行パターンを得るためのアクセル開度を示す。図8(a)に示すように、時刻t1において、運転者によるアクセルの踏み込みが開始され、その後、時刻t2に至るまでの間にアクセル開度が一定に保たれる。そして、時刻t2において、再び、アクセルの踏み込みが開始され、その後、時刻t2に至るまでの間にアクセル開度が一定に保たれる。そして、時刻t3において、アクセルが戻され、一定のアクセル開度に保たれる。
【0032】
次に、図8(b)に、図7に示すような走行パターンを得るためのモータ10の要求総出力を示す。図8(b)に示すように、モータ10の要求総出力は、時刻t1からt2に至るまでの間では、加速に必要な一定値Pm1となり、時刻t2からt3に至るまでの間では、加速に必要な一定値Pm2となる。これらの値Pm1、Pm2は、後述するように、アクセル開度及びアクセル開速度により決定される。そして、モータ10の要求総出力は、時刻t3から時刻t4に至るまでの減速時には、減速度合いに応じて減少し、時刻t4以降の一定速走行時には、一定速度を保つための一定値となる。
【0033】
次に、主に図9により、VCM14(図3参照)で実行される制御フローを説明する。
図9は、加速時における制御内容であり、以下では、図8(a)の時刻t1からt2に至るまでの加速時を例として説明する。なお、時刻t2からt3までの再加速時も同様の制御であるので、以下では、その説明を省略する。図9において、Sは各ステップを示す。
本実施形態では、VCM14が、アクセル開度センサ18から入力されるアクセル開度aの信号に基づき、(1)アクセル開度a>0、(2)アクセル開速度av>0の2つの条件を満たした時に、加速開始と判定して、図9による加速時の制御を実行する。なお、アクセル開速度avは、アクセルを開く方向での速度をプラス(+)、閉じる方向での速度をマイナス(−)とする。なお、時刻t2からの再加速時には、アクセル開速度avが、0からプラスに変化するので、その時を、加速開始時と判定する。
【0034】
先ず、S1において、アクセル開度センサ18(図3参照)により検出されたアクセル開度aを表す信号を読み込む。次に、S2において、S1で読み込んだアクセル開度から、加速開始時のアクセル開速度avを算出する。具体的には、このS2では、加速開始時、例えば図8(a)のA点で示すような所定のアクセル開度に至るまでの時間と、その所定のアクセル開度とから、アクセル開速度avを算出する。
【0035】
次に、S3において、加速時におけるモータ10の要求総出力Pmを、加速開始時に決定する。このS3においては、図10に示すようなマップを用いて要求総出力Pmを決定する。
ここで、図10には、加速時にモータ10に要求される総出力Pmとアクセル開度との関係が、アクセル開速度avが高い場合(所定のアクセル開度に至るまでの時間が短い場合)、アクセル開速度avが低い場合(所定のアクセル開度に至るまでの時間が長い場合)に応じてマップ化されて規定されている。
S3では、図10のマップに基づいて、S1で読み込んだアクセル開度aと、S2で算出したアクセル開速度avとから、加速時のモータ10の要求総出力Pmを決定する。より詳細には、図10に示すマップにおいて用いるアクセル開度aは、例えば図8(a)のB点で示すようなアクセル開度aが一定になったときのアクセル開度aを用いる。又は、加速開始時のプラスのアクセル開速度avとなっている間に、そのアクセル開速度avの変化量に基づいて運転者が要求するアクセル開度aを推定し、この推定したアクセル開度を用いても良い。
【0036】
なお、アクセル開速度avが所定値以下となる、緩やかなアクセル踏み込み操作における加速時(緩加速時)おいては、要求モータ総出力Pmをアクセル開度aに連動させ、且つ、エネルギ電源2のみから出力する。このような緩加速時においては、要求モータ総出力Pmは小さいので、パワー電源4から出力を補わなくても、エネルギ不足で運転者に違和感を与えることはない。
【0037】
次に、S4において、S3で決定した要求モータ総出力Pmで持続可能なモータ出力時間Tmを、上述した図6に示すマップを用いて決定する。具体的には、図6に示すように、S3で決定した要求モータ総出力Pm=Pm1であるとき、モータ出力時間Tm=Tm1と決定される。このようにモータの許容発熱量を考慮して規定された図6に示す定格出力マップを用いてモータ出力時間を決定することにより、要求モータ総出力Pmでの、モータ10の出力が発熱により低下しない最大出力時間を決定する。
【0038】
次に、S5において、エネルギ電源2及びパワー電源4のSOC及び温度を読み込む。
次に、S6において、先ず、S4で決定したモータ出力時間Tmの間出力可能なエネルギ電池2の最大出力密度Pdemaxを、上述した図5(a)に示すマップを用いて決定する。具体的には、S5で読み込んだエネルギ電源2のSOC及び温度(ここでは、SOC=50%、温度=25℃であるものとする)に基づいて、図5(a)に示すように、S4で決定したモータ出力時間Tmから、エネルギ電源2の出力可能な最大パワー密度Pde=Pdemaxが決定される。
ここで、エネルギ電源2の最大出力P1は、以下の式(1)により算出される。
エネルギ電源最大出力P1[W]=最大パワー密度Pdemax[W/kg]×エネルギ電源搭載重量[kg]・・・式(1)
即ち、このS6では、図5(a)により決定した最大パワー密度Pdemaxに、車両に搭載されるエネルギ電源の総重量を掛けて、エネルギ電源2の最大出力P1を算出する。
【0039】
次に、S7において、パワー電源4に要求される出力PDを、以下の式(2)により算出する。
要求パワー電源出力PD[W]=要求モータ総出力Pm[W]−エネルギ電池最大出力P1[W]・・・式(2)
即ち、S3で決定した要求モータ総出力Pmの値から、S6で算出されたエネルギ電池最大出力P1を引いて、要求パワー電源出力PDを算出する。
【0040】
次に、S8において、要求パワー電源出力PDが0より大きいか否かを判定する。
要求パワー電源出力PDが0以下(PD≦0)のとき、S9に進み、要求モータ総出力Pmがエネルギ電源2のみからモータ10に供給されるよう、電力調整器6を制御して、モータ10の要求出力Pmを得る。PD=0の場合、エネルギ電源2の出力電力(エネルギ電源2からモータ10に供給される電力)は、S6で決定したエネルギ電池4の最大出力P1となり、PD<0の場合、エネルギ電源2の出力は、その最大出力P1より小さい出力となる。
このS9の処理は、S10の判定により加速終了時(図7の時刻t2参照)まで行われる。S10においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
この場合、エネルギ電源2の出力電力のみで要求モータ総出力Pmを供給することが出来、また、S4においてモータの許容発熱量を考慮した最大出力時間Tmを設定しているので、加速時において、パワー電源4のエネルギを消費することなく、効果的に要求モータ総出力Pmを維持することが出来る。
【0041】
一方、S8において、要求パワー電源出力PDが0を超える値のとき、S11に進み、S7で算出した要求パワー電源出力PDの出力時間TDを設定する。このS11では、S4で決定されたモータ出力時間Tmを、要求パワー電源出力時間TDとして設定する。
【0042】
次に、S12において、S11で設定した出力時間TD(=Tm)の間出力可能なパワー電池4の最大出力Pdpmaxを、上述した図5(b)に示すマップを用いて決定する。具体的には、S5で読み込んだパワー電源4のSOC及び温度(ここでは、SOC=50%、温度=25℃であるものとする)に基づいて、図5(b)に示すように、S11で設定した要求パワー電源出力時間TD(=Tm)から、パワー電源4の出力可能な最大パワー密度Pdp=Pdpmaxが決定される。
ここで、パワー電源4の最大出力P2は、以下の式(3)により算出される。
パワー電源最大出力P2[W]=最大パワー密度Pdpmax[W/kg]×パワー電源搭載重量[kg]・・・式(3)
即ち、このS12では、パワー電源4の最大出力P2を、図5(b)により決定した最大パワー密度Pdpmaxに、車両に搭載されるパワー電源の総重量を掛けて算出する。
【0043】
次に、S13において、S7で算出された要求パワー電源出力PDが、S12で算出された最大出力P2以下であるか否かを判定する。
要求パワー電源出力PDが最大出力P2以下のとき、S14に進み、パワー電池4の出力PSを要求パワー電源出力PDとする。
次に、S15において、エネルギ電源2からその最大出力P1(S6参照)がモータ10に供給され、且つ、パワー電源4から要求パワー電源出力PDがモータ10に供給されるよう、電力調整器6を制御して、モータ10の要求出力Pmを得る。
このS15の処理は、S16の判定により加速終了時(図7の時刻t2参照)まで行われる。S16においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
【0044】
ここで、図11は、本発明の実施形態による電動車両の要求エネルギ電源出力Pe(図11(a))及び要求パワー電源出力Pp(図11(b))と時間tとの関係の一例を示す線図である。この図11では、本実施形態における要求出力Pe、Ppを実線で、比較例として、従来技術(特開平8−33120号公報)による要求出力を一点鎖線で示す。
図11の時刻t1〜t2、及び、時刻t2〜t3における線図に示すように、本実施形態では、エネルギ電源2の出力を最大にしているので、エネルギ電源からの出力が従来技術より大きく、一方、パワー電源4の出力を、エネルギ電源2の出力で不足する電力を補うようにしているので、パワー電源からの出力が従来技術より小さくなる。
従って、本実施形態では、例えば、図8の時刻t2〜t3に示すようなさらなる加速時において、上述した従来技術(図2参照)のような、パワー電源のエネルギ供給不足に起因した、モータの出力低下を抑制することが出来る。
このように、本実施形態では、エネルギ電源2の出力電力(=最大出力P1)で不足する電力(要求パワー電源出力PD)をパワー電源4で補うので、再加速時等に、パワー電源4の容量が不足してしまうことを効果的に抑制しつつ、有効に要求モータ総出力Pmを得ることが出来る。また、S4においてモータの許容発熱量を考慮した最大出力時間Tmを設定しているので、加速時において、効果的に要求モータ総出力Pmを維持することが出来る。
【0045】
一方、S13において、要求パワー電源出力PDが最大出力P2を超えると判定されたとき、S17に進み、パワー電池4の要求出力PSを最大出力P2に制限する。
次に、S18において、エネルギ電源2から、その最大出力P1(S6参照)がモータ10に供給され、且つ、パワー電源4から、制限された出力P2がモータ10に供給されるよう、電力調整器6を制御する。
このS18の処理は、S19の判定により加速終了時(図7の時刻t2参照)まで行われる。S19においては、アクセル開速度avがマイナスとなったとき、加速終了と判定する。
【0046】
ここで、図12は、本発明の実施形態による電動車両の通常時の総出力Pm(図12(a))及び制限時の総出力Pm(図12(b))と時間tとの関係を示す線図である。ここで、通常時とは、上述したS9又はS15による出力制御が実行されるときであり、制限時とは、S18による出力制御が実行されるときである。
図12に示すように、モータ10の総出力は、パワー電源4の出力を要求出力PDからP2に制限した分、Pm1からPm2に出力制限される。
このような出力制限処理は、例えば、パワー電源4の劣化等に起因して極端にその出力密度(図5(b)参照)が低下した場合等に有効である。本実施形態では、このような場合、モータ10の総出力に制限をかける一方、その制限出力を最大出力時間Tm出力するようにしているので、加速時に、運転者に与える違和感を小さく抑えながら、効果的に一定のモータ総出力を維持することが出来る。
【0047】
次に、図13により、時刻t1からt3にかけて加速が長時間続く場合の例を説明する。図13は、本発明の実施形態による電動車両におけるアクセル開度(図13(a))、出力される総出力Pm(図13(b))及び車速V(図13(c))と時間tとの関係の他の例を示す線図である。
本実施形態では、図13(a)に示すようなアクセル開度要求が入力された場合、上述した制御フロー(図9)により、図13(b)の実線で示すように、モータ10の総出力Pmが得られ、図13(c)の実線で示すような車速Vが得られる。一方、一点鎖線で示すような従来技術では、図13(b)に示すようにモータの出力が低下し、そのような出力低下により、図13(c)に示すように車速が低下する場合がある。本実施形態では、このようなモータの出力低下を抑制することが出来る。
【0048】
なお、本実施形態では、時刻t3から時刻t4までの減速時(図7及び図8参照)には、エネルギ電源2は、基本的にパワー電源4への充電電力を出力し、また、減速に必要な電力を出力する。時刻t4以降の一定速走行時には、エネルギ電源2は、減速時に充電しきれなかったパワー電源4への充電電力分を出力し、また、一定速走行に必要な電力を出力する。
【0049】
なお、本実施形態では、エネルギ電源2及びパワー電源4として、それぞれリチウムイオン電池を用いたが、エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源であっても良く、また、パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源であっても良い。
【符号の説明】
【0050】
2 エネルギ電源(エネルギ電池)
4 パワー電源(パワー電池)
6 DC−DCコンバータ(電力調整器)
10 モータ(電動機)
14 車両制御器(電力調整器の制御手段、電動機要求出力決定手段、出力時間設定手段、電源要求出力設定手段、エネルギ電源/パワー電源出力可能電力決定手段)
16 バッテリ状態検出器(エネルギ電源/パワー電源残量検出手段)
【特許請求の範囲】
【請求項1】
低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両であって、
上記エネルギ電源及び上記パワー電源から上記電動機に供給される電力を調整する電力調整器と、
上記電動車両の加速時における上記電動機の要求出力を加速開始時に決定する電動機要求出力決定手段と、
上記決定された電動機の要求出力の所定の最大出力時間を設定する出力時間設定手段と、
上記所定の最大出力時間の間、上記エネルギ電源の出力電力を、上記電動機の要求出力に対して出力可能な最大の電力に設定し、上記パワー電源の出力電力を、上記電動機の要求出力に対して上記エネルギ電源の出力電力を補う電力に設定する電源要求出力設定手段と、
上記電動車両の加速時、上記電源要求出力設定手段により設定されたエネルギ電源の出力電力及びパワー電源の出力電力が得られるよう、上記電力調整器を制御する制御手段と、
を有することを特徴とするハイブリッド電源式電動車両。
【請求項2】
上記電源要求出力設定手段は、上記電動機の要求出力が、上記エネルギ電源の最大の出力電力より小さい場合、上記エネルギ電源のみから上記電動機に電力を供給するよう設定する請求項1に記載のハイブリッド電源式電動車両。
【請求項3】
さらに、上記電動車両のアクセルのアクセル開度を検出するアクセル開度センサと、
この検出されたアクセル開度からアクセル開速度を算出するアクセル開速度算出手段と、
加速開始時における上記電動機の出力とアクセル開度との関係をアクセル開速度に応じて規定した電動機出力決定マップと、を有し、
上記電動機要求出力決定手段は、上記電動機出力決定マップに基づいて、上記検出されたアクセル開度及び上記算出されたアクセル開速度から上記電動機の要求出力を決定する請求項1又は請求項2に記載のハイブリッド電源式電動車両。
【請求項4】
さらに、上記電動機の定格出力時間と定格出力との関係を規定した電動機定格出力マップを有し、
上記出力時間設定手段は、この電動機定格出力マップにおいて、上記定格出力を上記電動機の要求出力とし、上記電動機定格出力マップに基づいて、上記電動機の要求出力を持続可能な定格出力時間の最大値を算出し、この算出された定格出力時間の最大値を上記電動機の要求出力の最大出力時間として設定する請求項1乃至3のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項5】
上記電動機の定格出力と定格出力時間との関係は、上記電動機の許容発熱量に基づいて規定される請求項4に記載のハイブリッド電源式電動車両。
【請求項6】
さらに、上記エネルギ電源のエネルギ容量の残量を検出するエネルギ電源残量検出手段と、
上記エネルギ電源の出力密度、出力持続時間の関係をエネルギ電源のエネルギ残量に応じて規定したエネルギ電源SOCマップと、
このエネルギ電源SOCマップにおいて、その出力持続時間を上記電動機の要求出力の最大出力時間とし、上記エネルギ電源SOCマップに基づいて、上記最大出力時間とした出力持続時間及び上記検出されたエネルギ電源のエネルギ残量から上記エネルギ電源の出力可能な出力密度を算出し、この算出された出力密度及び上記エネルギ電源の搭載重量に基づいて、上記エネルギ電源の出力可能な電力を決定するエネルギ電源出力可能電力決定手段と、を有し、
上記電源要求出力設定手段は、この決定された出力可能な電力を上記エネルギ電源の最大の電力として設定する請求項4又は請求項5に記載のハイブリッド電源式電動車両。
【請求項7】
さらに、上記パワー電源のエネルギ容量の残量を検出するパワー電源残量検出手段と、
上記パワー電源の出力密度、出力持続時間の関係をパワー電源のエネルギ残量に応じて規定したパワー電源SOCマップと、
このパワー電源SOCマップにおいて、その出力持続時間を上記電動機の要求出力の最大出力時間とし、上記パワー電源SOCマップに基づいて、上記最大出力時間とした出力持続時間及び上記検出されたパワー電源のエネルギ残量から上記パワー電源の出力可能な出力密度を算出し、この算出された出力密度及び上記パワー電源の搭載重量に基づいて、上記パワー電源の出力可能な電力を決定するパワー電源出力可能電力決定手段と、を有する請求項4乃至6のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項8】
上記電源要求出力設定手段は、上記電源要求出力設定手段により設定されたパワー電源の出力電力が、上記パワー電源出力可能電力決定手段により決定された出力可能な電力より大きい場合、上記パワー電源の出力電力を上記決定された出力可能な電力に設定する請求項7に記載のハイブリッド電源式電動車両。
【請求項9】
上記パワー電源及び上記エネルギ電源は、いずれもリチウムイオン電池である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項10】
上記パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項11】
上記エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項1】
低出力高密度型のエネルギ電源と、高出力低密度型のパワー電源と、これらの電源から電力の供給を受けて作動する電動機と、を有する、ハイブリッド電源式電動車両であって、
上記エネルギ電源及び上記パワー電源から上記電動機に供給される電力を調整する電力調整器と、
上記電動車両の加速時における上記電動機の要求出力を加速開始時に決定する電動機要求出力決定手段と、
上記決定された電動機の要求出力の所定の最大出力時間を設定する出力時間設定手段と、
上記所定の最大出力時間の間、上記エネルギ電源の出力電力を、上記電動機の要求出力に対して出力可能な最大の電力に設定し、上記パワー電源の出力電力を、上記電動機の要求出力に対して上記エネルギ電源の出力電力を補う電力に設定する電源要求出力設定手段と、
上記電動車両の加速時、上記電源要求出力設定手段により設定されたエネルギ電源の出力電力及びパワー電源の出力電力が得られるよう、上記電力調整器を制御する制御手段と、
を有することを特徴とするハイブリッド電源式電動車両。
【請求項2】
上記電源要求出力設定手段は、上記電動機の要求出力が、上記エネルギ電源の最大の出力電力より小さい場合、上記エネルギ電源のみから上記電動機に電力を供給するよう設定する請求項1に記載のハイブリッド電源式電動車両。
【請求項3】
さらに、上記電動車両のアクセルのアクセル開度を検出するアクセル開度センサと、
この検出されたアクセル開度からアクセル開速度を算出するアクセル開速度算出手段と、
加速開始時における上記電動機の出力とアクセル開度との関係をアクセル開速度に応じて規定した電動機出力決定マップと、を有し、
上記電動機要求出力決定手段は、上記電動機出力決定マップに基づいて、上記検出されたアクセル開度及び上記算出されたアクセル開速度から上記電動機の要求出力を決定する請求項1又は請求項2に記載のハイブリッド電源式電動車両。
【請求項4】
さらに、上記電動機の定格出力時間と定格出力との関係を規定した電動機定格出力マップを有し、
上記出力時間設定手段は、この電動機定格出力マップにおいて、上記定格出力を上記電動機の要求出力とし、上記電動機定格出力マップに基づいて、上記電動機の要求出力を持続可能な定格出力時間の最大値を算出し、この算出された定格出力時間の最大値を上記電動機の要求出力の最大出力時間として設定する請求項1乃至3のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項5】
上記電動機の定格出力と定格出力時間との関係は、上記電動機の許容発熱量に基づいて規定される請求項4に記載のハイブリッド電源式電動車両。
【請求項6】
さらに、上記エネルギ電源のエネルギ容量の残量を検出するエネルギ電源残量検出手段と、
上記エネルギ電源の出力密度、出力持続時間の関係をエネルギ電源のエネルギ残量に応じて規定したエネルギ電源SOCマップと、
このエネルギ電源SOCマップにおいて、その出力持続時間を上記電動機の要求出力の最大出力時間とし、上記エネルギ電源SOCマップに基づいて、上記最大出力時間とした出力持続時間及び上記検出されたエネルギ電源のエネルギ残量から上記エネルギ電源の出力可能な出力密度を算出し、この算出された出力密度及び上記エネルギ電源の搭載重量に基づいて、上記エネルギ電源の出力可能な電力を決定するエネルギ電源出力可能電力決定手段と、を有し、
上記電源要求出力設定手段は、この決定された出力可能な電力を上記エネルギ電源の最大の電力として設定する請求項4又は請求項5に記載のハイブリッド電源式電動車両。
【請求項7】
さらに、上記パワー電源のエネルギ容量の残量を検出するパワー電源残量検出手段と、
上記パワー電源の出力密度、出力持続時間の関係をパワー電源のエネルギ残量に応じて規定したパワー電源SOCマップと、
このパワー電源SOCマップにおいて、その出力持続時間を上記電動機の要求出力の最大出力時間とし、上記パワー電源SOCマップに基づいて、上記最大出力時間とした出力持続時間及び上記検出されたパワー電源のエネルギ残量から上記パワー電源の出力可能な出力密度を算出し、この算出された出力密度及び上記パワー電源の搭載重量に基づいて、上記パワー電源の出力可能な電力を決定するパワー電源出力可能電力決定手段と、を有する請求項4乃至6のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項8】
上記電源要求出力設定手段は、上記電源要求出力設定手段により設定されたパワー電源の出力電力が、上記パワー電源出力可能電力決定手段により決定された出力可能な電力より大きい場合、上記パワー電源の出力電力を上記決定された出力可能な電力に設定する請求項7に記載のハイブリッド電源式電動車両。
【請求項9】
上記パワー電源及び上記エネルギ電源は、いずれもリチウムイオン電池である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項10】
上記パワー電源は、リチウムイオンキャパシタ、コンデンサ又はニッケル−カドミウム電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【請求項11】
上記エネルギ電源は、金属空気電池、Li−S電池、多価電池、燃料電池及びその他の電気化学式反応式電源の何れか1つ又はそれらを複合した電源である請求項1乃至8のいずれか1項に記載のハイブリッド電源式電動車両。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−59223(P2013−59223A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−196817(P2011−196817)
【出願日】平成23年9月9日(2011.9.9)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]