
ハイブリッド駆動装置の制御装置

【課題】EV走行領域を縮小することなく、かつエンジン始動時に生じるヘジテーションの低減を図ることが可能なハイブリッド駆動装置の制御装置を提供する。
【解決手段】ハイブリッド駆動装置1は、コーンリング式変速機構3と、入力軸6に駆動連結されるモータ2と、エンジン9と入力軸6との間に介在するクラッチ4とを備えており、EV走行中におけるエンジン始動時には、クラッチ4を係合してエンジン9の回転上昇を行う。このハイブリッド駆動装置1の制御装置100に、エンジン始動時におけるクラッチ4の係合制御に合わせて、変速機構3をアップシフトしてイナーシャトルクを出力させる始動時アップシフト制御手段107を備え、エンジン始動時に、モータ2の駆動トルクTmにインプットコーン22、モータ2のロータ、及び入力軸6の減速によるイナーシャトルクTiを加えた出力トルクToutを駆動車輪10に出力させる。
【解決手段】ハイブリッド駆動装置1は、コーンリング式変速機構3と、入力軸6に駆動連結されるモータ2と、エンジン9と入力軸6との間に介在するクラッチ4とを備えており、EV走行中におけるエンジン始動時には、クラッチ4を係合してエンジン9の回転上昇を行う。このハイブリッド駆動装置1の制御装置100に、エンジン始動時におけるクラッチ4の係合制御に合わせて、変速機構3をアップシフトしてイナーシャトルクを出力させる始動時アップシフト制御手段107を備え、エンジン始動時に、モータ2の駆動トルクTmにインプットコーン22、モータ2のロータ、及び入力軸6の減速によるイナーシャトルクTiを加えた出力トルクToutを駆動車輪10に出力させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば変速機構と、該変速機構の入力部材に駆動連結されたモータと、エンジンと該入力部材との間に介在するクラッチとを制御するハイブリッド駆動装置の制御装置に係り、詳しくは、エンジンの始動時にクラッチを係合して該エンジンの回転上昇を行うハイブリッド駆動装置の制御装置に関する。
【背景技術】
【0002】
近年、環境問題の取り組み等から、車両の燃費向上を図ったハイブリッド駆動装置が種々開発されている。このようなハイブリッド駆動装置の中には、変速機構と、該変速機構の入力部材に駆動連結されたモータと、エンジンと該入力部材との間に介在するクラッチとを備えた、いわゆる1モータ・パラレル型のハイブリッド駆動装置が提案されている(特許文献1参照)。
【0003】
上記特許文献1のものは、クラッチを解放してエンジンを切離した状態で、モータによるEV走行を行うことを可能としており、例えばこのEV走行中において運転者が要求する要求トルクがモータトルクよりも大きくなると(アクセル開度が所定の低下開度領域を出るとき)、エンジンの始動を判定し、エンジン及びモータの駆動力による走行状態に移行する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−82260号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記特許文献1のような1モータ・パラレル型のハイブリッド駆動装置にあって、モータのみの駆動力によるEV走行中からエンジンを始動する場合には、クラッチを係合しつつモータの駆動力によってエンジンの回転数を上昇させた後、該エンジンの燃焼を開始している。
【0006】
このエンジンの始動において、特許文献1のものは、自動変速機のクラッチC1を解放することで、車両の惰性走行中にエンジンを始動し、エンジンのクランキング負荷が駆動車輪に伝達されることを防止して、減速ショックが生じることの防止を図っているが、エンジンを始動する必要がある場合は、例えば運転者がアクセルを踏み込んで車両としての出力トルクの増大(つまり車両の加速)を要求している場合が多いので、瞬間的に車両の加速が無くなることは、ドライバビリティとして違和感を生じる虞もある。
【0007】
しかし、例えばクラッチC1を解放せずに、モータと駆動車輪とが駆動伝達状態にあったとしても、エンジンの回転数を上昇するためにモータの駆動力の一部が用いられるので、瞬間的に車両の加速が鈍る、いわゆるヘジテーションが生じてしまう。
【0008】
このヘジテーションの発生を防止するためには、EV走行中にあって、常時モータにエンジン始動のための余力を残しておくことが考えられるが、そのためには、エンジン始動タイミングを早めるようにEV走行領域を縮小する必要があり、エンジン始動の頻度が多くなり、車両の燃費向上の妨げになるという問題がある。
【0009】
そこで本発明は、EV走行領域を縮小することなく、かつエンジン始動時に生じるヘジテーションの低減を図ることが可能なハイブリッド駆動装置の制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
本発明は(例えば図1乃至図5参照)、入力部材(6)に接続される円錐形状のインプットコーン(22)と、駆動車輪(10)に駆動連結される出力部材(39r,39l)に接続されると共に該インプットコーン(22)と平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置された円錐形状のアウトプットコーン(23)と、前記インプットコーン(22)又は前記アウトプットコーン(23)を囲むように配置されかつ該インプットコーン(22)と該アウトプットコーン(23)が対向する傾斜面に挟持されるリング(25)と、を有する変速機構(3)の変速比を、該リング(25)を軸方向に移動制御することで変速制御する変速制御手段(101)と、
前記入力部材(6)に駆動連結されるモータ(2)を駆動制御するモータ制御手段(102)と、
エンジン(9)と前記入力部材(6)との間に介在するクラッチ(4)を係合制御するクラッチ制御手段(103)と、
車両走行中に前記クラッチ(4)を解放して前記エンジン(9)を停止している状態から、前記エンジン(9)の始動を判定するエンジン始動判定手段(106)と、
前記エンジン始動判定手段(106)により前記エンジン(9)の始動が判定された際に、前記クラッチ制御手段(103)に指令して前記クラッチ(4)を係合制御しつつ該クラッチ(4)のトルク容量を上昇していくことで前記入力部材(6)の回転に基づき前記エンジン(9)の回転速度を上昇させ、前記エンジン(9)の燃焼を開始させるエンジン始動制御手段(105)と、
前記エンジン始動制御手段(105)による前記クラッチ(4)の係合制御時に、前記変速制御手段(101)に指令して前記変速機構(3)の変速比をアップシフト変速する始動時アップシフト制御手段(107)と、を備えたことを特徴とするハイブリッド駆動装置(1)の制御装置(100)で構成される。
【0011】
また、本発明は(例えば図1参照)、運転者の要求トルク(Tr)を検出する要求トルク検出手段(108)を備え、
前記始動時アップシフト制御手段(107)は、前記要求トルク(Tr)と前記モータ(2)の駆動トルク(Tm)とに基づき、前記アップシフト変速における変速速度を制御することを特徴とする。
【0012】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これは、発明の理解を容易にするための便宜的なものであり、特許請求の範囲の構成に何等影響を及ぼすものではない。
【発明の効果】
【0013】
請求項1に係る本発明によると、始動時アップシフト制御手段が、エンジン始動制御手段によるクラッチの係合制御に合わせて、変速制御手段に指令してコーンリング式の変速機構の変速比をアップシフト変速して、比較的重量が重いインプットコーン、モータのロータ、及び入力部材の回転速度を低下させることで、それらインプットコーン、モータのロータ、及び入力部材の減速による十分な大きさのイナーシャトルクを発生させるので、エンジンの始動時に、モータの駆動トルクに上記イナーシャトルクを加えた出力トルクを駆動車輪に出力することができる。これにより、例えばEV走行領域を縮小することなく、エンジン始動時に生じるヘジテーションの低減を図ることができる。
【0014】
請求項2に係る本発明によると、始動時アップシフト制御手段が、要求トルクとモータの駆動トルクとに基づき、アップシフト変速における変速速度を制御することで、発生するイナーシャトルクの大きさを制御することができるので、インプットコーン、モータのロータ、及び入力部材の減速によるイナーシャトルクを要求トルクに応じて出力することができ、エンジン始動時に生じる出力トルクの変動を精度良く抑制することができる。
【図面の簡単な説明】
【0015】
【図1】本実施の形態に係るハイブリッド駆動装置の制御装置の概略構成を示すブロック図。
【図2】本ハイブリッド駆動装置の構成を示すスケルトン図。
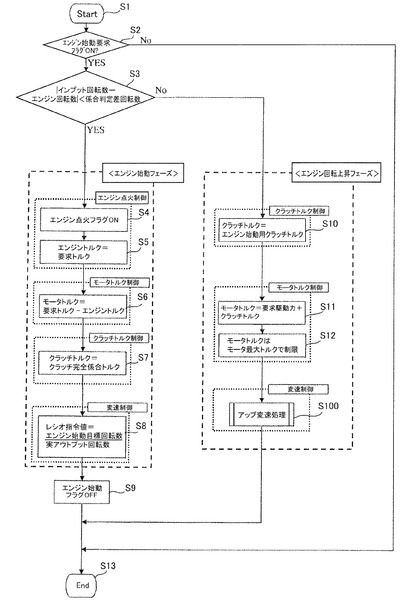
【図3】本ハイブリッド駆動装置の制御装置による制御を示すメインフローチャート。
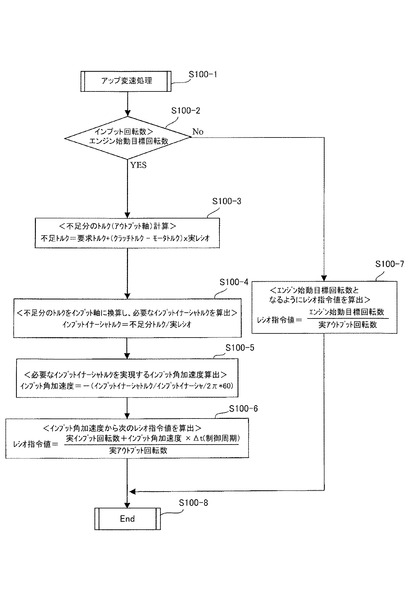
【図4】アップ変速処理の制御を示すサブフローチャート。
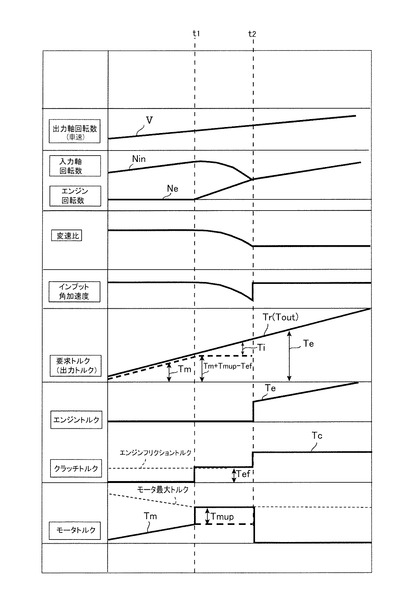
【図5】エンジン始動時における走行例を示すタイムチャート。
【発明を実施するための形態】
【0016】
[ハイブリッド駆動装置の概略構成]
以下、本発明に係る実施の形態を図1乃至図5に沿って説明する。まず、本発明に係るハイブリッド駆動装置1を搭載した車両の駆動系を図1及び図2に沿って説明する。図1に示すように、ハイブリッド駆動装置1は、エンジン(E/G)9と駆動車輪10との間に介在するように配置されており、入力軸(入力部材)6とディファレンシャル装置5を介して駆動車輪10に駆動連結されるアスクル軸(出力部材)39r,39lとの間の変速比を変速する変速機構(T/M)3と、該入力軸6に駆動連結されるモータ・ジェネレータ(M/G)2と、エンジン9と入力軸6との間に介在するクラッチ4とを備えて構成されている。
【0017】
詳細には、図2に示すように、クラッチ4は、乾式単板クラッチからなり、エンジン出力軸54に連結されているクラッチディスク4a及び入力軸6にダンパスプリング55を介して連結されている出力側となるプレッシャプレート4bを有し、プレッシャプレート4bは、ダイヤフラムスプリング56により常時クラッチディスク4aに接続するように付勢されている。また、レリーズベアリング57が上記プレッシャプレート4bの中心部分に回転自在に当接しており、該ベアリング57がレリーズフォーク58により押圧されることにより、上記クラッチ4が切操作される。レリーズフォーク58は、ロッド53を介してウォームホイール50に連結されており、該ホイール50には電動アクチュエータである電気モータA1の出力軸に連動されているウォーム52が噛合している。
【0018】
上記電気モータA1、ウォーム52、ウォームホイール50及びロッド53は、クラッチ操作部51を構成しており、上記電動アクチュエータ(電気モータ)A1に基づく該クラッチ操作部51の操作により上記クラッチ4を係合・解放操作すると共に、上記非可逆機構からなるウォーム52及びウォームホイール50が介在して、電気モータA1が停止した状態でのクラッチ4の操作位置(係合又は解放)に保持される。
【0019】
モータ・ジェネレータ(以下、単に「モータ」という)2は、ステータ(不図示)とモータ出力軸8に設けられたロータ(不図示)とを有し、モータ出力軸8は、両端部が不図示のケース部材にベアリングを介して回転自在に支持されている。モータ出力軸8の一方側には、歯車(ピニオン)からなる出力ギヤ16が形成されており、該出力ギヤ16はアイドラ歯車17を介して入力軸6に設けられた中間ギヤ19に噛合して、これら出力ギヤ16、アイドラ歯車17、及び中間ギヤ19によってモータ2と入力軸6とを駆動連結するギヤ伝動装置7を構成している。
【0020】
変速機構3は、いわゆる無段変速機構であるコーンリング式CVTからなり、入力軸6に接続されて入力側となる円錐形状のインプットコーン22と、出力側となる同じく円錐形状のアウトプットコーン23と、金属製のリング25とからなる。アウトプットコーン23は、インプットコーン22と平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置されており、上記リング25が、これら両コーン22,23の対向する傾斜面に挟持されるようにかつ両コーンのいずれか一方(本実施の形態ではインプットコーン22)を取囲むように配置されている。これら両コーン22,23は例えば鋼鉄製からなり、比較的重量の重い重量物からなるので、回転変化時には比較的大きなイナーシャトルクが出る。
【0021】
両摩擦車の少なくとも一方には大きなスラスト力が作用しており、上記リング25は上記スラスト力に基づく比較的大きな挟圧力により挟持されている。具体的には、アウトプットコーン23と無段変速装置出力軸24との間には軸方向で対向する面にボールを介在した傾斜カム機構からなる軸力付与機構28が配設されており、該軸力付与機構28は、アウトプットコーン23に、伝達トルクに応じたスラスト力を付与し、該スラスト力に対抗する方向に支持されているインプットコーン22との間でリング25に大きな挟圧力を付与する。
【0022】
上記リング25は、例えば電動アクチュエータである電気モータA2によって軸方向に移動駆動(移動制御)されると共に該リング25を回転自在に支持する移動部材を備えた変速操作機構60によって、両コーン22,23に対する軸方向位置が位置制御され、それによって、両コーン22,23に対する接触半径を変更することで、両コーン22,23の間で変速比を変更する。
【0023】
そして、上記アウトプットコーン23に駆動連結された無段変速装置出力軸24にはギヤ(ピニオン)44が形成されており、該歯車44にはディファレンシャル装置5のデフリングギヤ41が噛合している。ディファレンシャル装置5は、該デフリングギヤ41に伝達された回転を、左右の差回転を吸収しつつ左右のアクスル軸39l,39rに出力し、それらアクスル軸39l,39rに駆動連結された左右駆動車輪10に伝達する。
【0024】
[ハイブリッド駆動装置の制御装置について]
ついで、本発明に係るハイブリッド駆動装置1の制御装置100について図1、図3及び図4に沿って説明する。図1に示すように、本ハイブリッド駆動装置1の制御装置(制御部(ECU))100は、変速制御手段101、モータ制御手段102、クラッチ制御手段103、エンジン制御手段104、エンジン始動制御手段105、エンジン始動判定手段106、始動時アップシフト制御手段107、要求トルク検出手段108などを備えている。
【0025】
また、制御部100には、エンジン回転数Neを検出するエンジン回転数センサ91、入力軸6の回転数(モータ2の回転数)を検出する入力軸(モータ)回転数センサ92、アスクル軸39r,39l或いは無段変速装置出力軸24の回転数(即ち車速)を検出する出力軸回転数(車速)センサ93、不図示のアクセルペダルの踏込量(アクセル開度)を検出するアクセル開度センサ94などが接続されている。
【0026】
なお、本実施の形態では、便宜的に、変速制御手段101、モータ制御手段102、クラッチ制御手段103、エンジン制御手段104などを同じ制御部(ECU)100内に備えたものとして説明しているが、各手段を2個以上の制御部(ECU)で相互に通信可能に構成してもよく、それぞれ個別の制御部(ECU)を備えているような形態であってもよい。
【0027】
上記変速制御手段101は、走行中にあって、例えば出力軸回転数センサ93により検出される車速とアクセル開度センサ94により検出されるアクセル開度(要求トルク検出手段108により検出される運転者の要求トルクTr)とに基づき、エンジン9における燃料消費やモータ2における電力消費が最適となるように(要求された駆動力を出力しつつ燃費が良好となるように)あらかじめ準備された不図示のマップ等を参照することで、随時最適な変速比を判定し、上記電気モータA2を駆動制御して変速機構3の変速比を変速制御する。
【0028】
上記モータ制御手段102は、モータ2の駆動力のみを用いて走行するEV走行中にあっては、要求トルク検出手段108により検出される運転者の要求トルクTrが駆動車輪10から出力されるようにモータ2の駆動トルク(以下、「モータトルク」という)Tmの大きさを制御し、また、エンジン9の駆動力を用いて走行するエンジン走行中にあっては、エンジン9の出力トルク(以下、「エンジントルク」という)TeとモータトルクTmとの合計が駆動車輪10から出力される要求トルクTrとなるように、モータトルクTmの大きさ(力行・回生を含む)を制御する。なお、モータ制御手段102は、モータ2を定電力制御することで、モータ回転数(変速機構3の変速比)に拘らず、駆動車輪10に出力するモータトルクTmの大きさを一定に制御し得る。
【0029】
上記クラッチ制御手段103は、上記EV走行中にあっては、上記電気モータA1を駆動制御してクラッチ4を解放するように制御し、上記エンジン走行中にあっては、上記電気モータA1を駆動制御してクラッチ4を係合するように制御する。また、詳しくは後述するように、エンジン9の始動時には、クラッチ4をスリップ制御して該クラッチ4の伝達トルク容量(以下、「クラッチトルク」)Tcを制御し、エンジン回転数Ne(エンジン9の回転速度)を上昇させるように制御する。なお、本ハイブリッド駆動装置1にあって後進走行する場合には、クラッチ4は解放制御して、モータ2を逆転回転させることで駆動車輪10の後進回転を達成する。
【0030】
上記エンジン制御手段104は、エンジン走行中にあって、エンジン9におけるスロットル開度や燃料噴射量の制御などを行って、エンジントルクTeやエンジン回転数Neを自在に制御する。また、エンジン制御手段104は、詳しくは後述するエンジン始動時にあって、エンジン始動制御手段105からの指令に基づきエンジン9の点火制御を行う。
【0031】
上記エンジン始動判定手段106は、クラッチ4を解放してエンジン9を停止している状態のEV走行中(車両走行中)にあって、要求トルク検出手段108により検出される運転者の要求トルクTr(つまりアクセル開度)が、例えば不図示のマップ等により参照されるモータ2により走行可能なEV走行可能領域を超えた場合に、エンジン9の駆動力が必要と判断し、エンジン始動を判定する。
【0032】
上記エンジン始動制御手段105は、エンジン始動判定手段106によりエンジン9の始動が判定された際に、クラッチ制御手段103に指令してクラッチ4を係合制御しつつ該クラッチ4のトルク容量を上昇していくことで入力軸6の回転に基づきエンジン回転数Neを上昇させ、エンジン制御手段104に指令してエンジン9の燃焼(点火)を開始させる。
【0033】
上記始動時アップシフト制御手段107は、詳しくは後述するように、エンジン始動制御手段105からクラッチ制御手段103に指令されたクラッチ4の係合制御に合わせて、変速制御手段101に指令して変速機構3の変速比をアップシフト変速して入力軸6の回転数を低下させることで、ハイブリッド駆動装置1の入力側の回転部材(即ちインプットコーン22、入力軸6、ギヤ伝動装置7、モータ出力軸8、及びモータ2のロータなど)にてイナーシャトルクを発生させる。
【0034】
[エンジン始動時のアップシフト制御について]
ついで、上記制御部100によるエンジン始動時の制御について、図1を参照しつつ図3及び図4のフローチャートに沿って詳細に説明する。
【0035】
図3に示すように、例えば車両走行が開始された状態、特にEV走行状態にあっては、本エンジン始動時制御が開始され(S1)、エンジン始動判定手段106がエンジン9の始動を判定していない場合は、該エンジン始動判定手段106からエンジン始動要求フラグが出力されないので(フラグOFFであるので)(S2のNO)、そのままリターンして(S13)、エンジン始動判定手段106によりエンジン始動が判定されるまで待機する。
【0036】
上述のように、要求トルク検出手段108により検出される運転者の要求トルクTrが、モータ2により走行可能なEV走行可能領域を超えると、エンジン始動判定手段106によりエンジン始動が判定され、該エンジン始動判定手段106はエンジン始動要求をONし(S2のYES)、ステップS3に進む。
【0037】
{エンジン回転上昇フェーズ}
ステップS3に進むと、エンジン始動制御手段105は、入力軸6の回転数(インプット回転数Nin)とエンジン回転数Neとの差回転が所定の係合判定差回転数(クラッチ4が係合状態にあると判定できる回転数)より小さいか否かを判定し、ここではエンジン9が停止したEV走行状態であるので、インプット回転数Ninとエンジン回転数Neとの差回転が上記係合判定差回転より大きい(クラッチ4が解放状態にあって差回転が大きい)ので(S3のNO)、「エンジン回転上昇フェーズ」に入り、クラッチ制御手段103によりクラッチ4のクラッチトルクTcを制御する「クラッチトルク制御」(S10)に進む。
【0038】
「クラッチトルク制御」に進むと、クラッチ制御手段103は、クラッチトルクTcの大きさをエンジン9のフリクショントルク(エンジン9の内部摩擦抵抗やエンジンイナーシャトルク)よりも僅かに大きいエンジン始動用クラッチトルクTefに設定し、クラッチ制御手段103は、電気モータA1に指令して該設定されたエンジン始動用クラッチトルクTefにクラッチトルクTcが上昇するようにクラッチ4を徐々にスリップ係合制御する。これにより、クラッチトルクTcがエンジン9のフリクショントルクよりも大きくなるので、徐々にエンジン回転数Neが入力軸6の回転によって上昇されることになる。
【0039】
上記「クラッチトルク制御」に続いて、モータ制御手段102によりモータトルクTmを制御する「モータトルク制御」(S11,S12)が行われる。即ち、モータ制御手段102は、モータトルクTmを、要求トルク検出手段108により検出される要求トルクTrに上記設定されたクラッチトルクTc(エンジン始動用クラッチトルク)を加算した値に設定し、モータ2に対して該設定したモータトルクTmを出力するように指令する(S11)。しかし、実際には、モータ2の出力性能限界があるので、EV走行していた際のモータトルクに出力性能の限界であるモータ最大トルクで制限された形で、上乗せトルクTmupを加算したモータトルクTmを出力し(S12)、例えばその後、要求トルクTrが上昇すると、後述するように不足トルクが生じることになる(S100−3参照)。
【0040】
上記「モータトルク制御」に続いて、始動時アップシフト制御手段107により変速機構3の変速比をアップシフト制御する「変速制御」が行われる。即ち、この「変速制御」においては、図4に示すように、始動時アップシフト制御手段107によって「アップ変速処理」の制御が行われる。
【0041】
「アップ変速処理」が開始されると(S100−1)、まず、始動時アップシフト制御手段107は、入力軸6の回転数(インプット回転数Nin)がエンジン始動目標回転数よりも大きいか否かを判定する(S100−2)。インプット回転数Ninがエンジン始動目標回転数よりも小さい場合は(S100−2のNO)、つまりこれ以上アップシフトしてしまうと、インプット回転数Ninがエンジン始動目標回転数よりも低くなって、クラッチ4を係合した際に、エンジン9が低回転となってエンジン始動が困難となるので、アップシフトは行わず、ステップS100−7に進む。
【0042】
ステップS100−7に進んだ場合は、インプット回転数Ninがエンジン始動目標回転数となるように、該エンジン始動目標回転数を実際のアウトプット回転数Noutで除算した値を、変速比の指令値(レシオ指令値)として設定し、変速制御手段101によって電気モータA2に指令する形で、変速機構3の変速比を該設定したレシオ指令値となるように制御する。この場合、インプット回転数Ninの大きさによっては、ダウンシフトすることもある。
【0043】
また、モータトルクTmを上昇しても、モータ2の性能限界によって、要求トルクTrにクラッチトルクTcを加算した値まで上昇できない場合は、駆動車輪10に出力されるトルクが僅かに不足して、エンジン始動に伴うヘジテーションが発生することになるが、エンジン回転数Neは、上記設定されたレシオ指令値に基づく変速比で回転するインプット回転数Ninにクラッチ4の係合に伴って上昇されるため、エンジン始動目標回転数まで上昇されて、エンジン始動は達成される。
【0044】
一方、上記ステップS100−2において、インプット回転数Ninがエンジン始動目標回転数よりも大きい場合は(S100−2のYES)、インプット回転数Ninがエンジン始動目標回転数になるまでアップシフトすることが可能であるので、始動時アップシフト制御手段107は、上記モータ2の出力性能限界によって要求トルクTrに対して不足した分をアップシフト時のイナーシャトルクで補うため、アップシフトする際のレシオ指令値の算出し、変速制御手段101から電気モータA2に指令する形で、変速機構3の変速比を制御する。
【0045】
詳細には、ステップS100−3において、まず、上記クラッチトルクTcから現在のモータトルクTm(EV走行していた際のモータトルクに出力性能の限界まで上乗せ分を加算したモータトルクTm)を減算した値に実際の変速比(例えば入力軸回転数センサ92により検出される実インプット回転数Ninを出力軸回転数センサ93により検出される実アウトプット回転数Noutで除算した値)を乗算した値を、要求トルク検出手段108により検出される要求トルクTrに加算し、駆動車輪10における不足分のトルクを算出する。
【0046】
次に、ステップS100−4において、上記算出した不足分のトルクを実際の変速比で除算し、不足分のトルクをインプットトルクに換算し、つまり不足分を補うトルクとして必要なインプットイナーシャトルクを算出する。続いて、ステップS100−5において、上記算出されたインプットイナーシャトルクをインプットイナーシャ(上述した変速機構3の入力側の回転部材の重量)で除算して、単位系(例えば毎分を毎秒に合わせるために60を乗算し、角加速度に合わせるために2πを除算する)を整えて、上記必要なインプットイナーシャトルクを実現するインプット角加速度を算出する。
【0047】
そして、ステップS100−6において、実インプット回転数Ninと上記インプット角加速度に所定の制御周期(ステップS100−6が繰り返される周期)Δtを乗算した値とを加算した値を、実アウトプット回転数Noutで除算することで、次に変速機構3に指令すべきレシオ指令値を算出し、この算出したレシオ指令値を、変速制御手段101から電気モータA2に指令する形で変速機構3に指令し、変速比を不足分のトルクを補うイナーシャトルクTiが出力されるようにアップシフト制御する。
【0048】
以上の制御を、インプット回転数Ninとエンジン回転数Neとの差回転が所定の係合判定差回転数より小さくなるまで(つまりクラッチ4の差回転が略々無くなって係合状態となるまで)繰り返すことで(即ち図3のS1,S2のYES、S3のNO、S10,S11,S12,S100,S13)、運転者の要求トルクTrにクラッチトルクTc(エンジンフリクショントルク)が加わった値に対してモータトルクTm(EV走行時のモータトルクに上乗せしたトルクTmup)で不足したトルクを、アップシフト変速の変速速度を制御する形で(変速比を制御周期毎に変更することで)、随時イナーシャトルクTiによって補うことができるので、駆動車輪10から出力される出力トルクToutが要求トルクTr通り出力され、ヘジテーションが生じることが防止される。
【0049】
{エンジン始動フェーズ}
図3に示すように、上記ステップS3において、インプット回転数Ninとエンジン回転数Neとの差回転が所定の係合判定差回転数より小さくなったことを判定すると(S3のYES)、「エンジン始動フェーズ」に入り、エンジン始動制御手段105によりエンジン9を点火して始動する「エンジン点火制御」(S4,S5,S6,S7,S8)に進む。「エンジン点火制御」に進むと、エンジン始動制御手段105は、まず、エンジン点火フラグをONし(S4)、エンジントルクTeを上記運転者の要求トルクTrに設定する(S5)。
【0050】
上記「エンジン点火制御」に続いて、モータ制御手段102によりモータトルクTmを制御する「モータトルク制御」(S6)が行われる。即ち、この状態では、運転者の要求トルクTrが例えば一定であるのに、エンジントルクTeが上昇していくので、それに合わせてモータトルクTmを設定する必要があり、つまり要求トルクTrからエンジントルクTeを減算した値をモータトルクTmとして設定し、モータ2に対して該設定したモータトルクTmを出力するように指令する。
【0051】
上記「モータトルク制御」に続いて、クラッチ制御手段103によりクラッチトルクTcを制御する「クラッチトルク制御」が行われる。即ち、この「クラッチトルク制御」においては、クラッチトルクTcを、クラッチ4が完全係合状態となるようなクラッチ完全係合トルクに設定し、つまりクラッチ制御手段103によりクラッチ4が完全係合状態となるように制御される(S7)。
【0052】
上記「クラッチトルク制御」に続いて、変速制御手段101により変速機構3の変速比を制御する「変速制御」が行われる。即ち、この「変速制御」においては、エンジン9をエンジン始動目標回転数に維持するため、エンジン始動目標回転数を上記出力軸回転数センサ93により検出される実アウトプット回転数で除算した値を、次に変速機構3に指令すべきレシオ指令値として算出し、変速制御手段101から変速機構3に指令して、つまり入力軸6の回転数が車速V(出力軸回転数)に応じてエンジン始動目標回転数となるように変速制御される。
【0053】
以上の制御(S4,S5,S6,S7,S8)により、運転者の要求トルクTrを出力する駆動源として、徐々にモータ2からエンジン9に切換り、エンジントルクTeによって要求トルクTrが出力されるようになり、つまりEV走行からエンジン走行に切換えられていく。
【0054】
その後は、エンジン始動判定手段106によってエンジン始動要求フラグがOFFされ(S9)、ステップS2においてエンジン始動要求フラグのONが検出されなくなり(S2のNO)、つまりEV走行からエンジン走行に完全に切換えられた状態となる。
【0055】
[エンジン始動時における走行例]
ついで、エンジン始動時における走行例を、図1乃至図4を参照しつつ図5のタイムチャートに沿って説明する。
【0056】
例えばEV走行中から、運転者がアクセルを徐々に踏み込んでいくような(アクセル開度が徐々に大きくされていくような)走行状態にあって、要求トルク検出手段108により徐々に大きくされていく要求トルクTrが検出されている状態では、モータ制御手段102によりモータ2が制御されて該要求トルクTrに応じてモータトルクTmが出力され、車両が加速して車速Vが上昇していくと共に、インプット回転数(入力軸回転数)Nin(モータ回転数Nm)も上昇していく。
【0057】
時点t1において、例えば所定の車速Vに到達し、エンジン始動判定手段106がモータ2の出力限界(モータ最大トルクから上乗せトルクTmupを減算した値)に到達したことに基づきエンジン9の始動を判定し、エンジン始動要求フラグをONにする(S2のYES)。すると、エンジン始動制御手段105は、インプット回転数Ninとエンジン回転数Neとの差回転数が、クラッチ4が係合しているか否かを判定する係合判定差回転数よりも大きいので(つまりクラッチ4が係合していないので)(S3のNO)、「エンジン回転上昇フェーズ」を開始する。
【0058】
すると、クラッチ制御手段103は「クラッチトルク制御」を行って(S10)、クラッチトルクTcがエンジン9のフリクショントルクよりも僅かに大きなエンジン始動用クラッチトルクTefとなるようにクラッチ4をスリップ係合し、続けてモータ制御手段102が「モータトルク制御」を行って(S11,S12)、要求トルクTrに基づき出力していたモータトルクTmに加えて、モータ2の最大トルクまで上乗せしたトルクTmupを出力する。
【0059】
その後、時点t1から時点t2までにあって、運転者によりアクセルが更に踏み込まれて要求トルクTrが上昇すると、モータ2が上乗せトルクTmupを出力して最大トルクの出力状態であり、かつクラッチトルクTcがエンジン始動用クラッチトルクTefとなって負方向に作用する分、モータ2の出力トルクだけでは要求トルクTrを出力することができず、このままでは出力トルクToutが、図5中破線で示すように要求トルクTrより離れて、つまりヘジテーションを生じることになる。
【0060】
そこで、始動時アップシフト制御手段107は、変速制御手段101に指令する形で「変速制御」を行って「アップ変速処理」を開始し(S100)、不足分のトルクに見合うイナーシャトルクTiが出力されるように変速機構3をアップシフト変速する。このため、入力軸回転数Ninが低下していくと共に変速比も下降していき、インプット角加速度も負方向に低下(つまり減速)される。
【0061】
これにより、出力トルクToutは、モータ2の上乗せトルクTmup(モータ最大トルク)が出力された状態で、かつクラッチ4を係合してエンジン始動用クラッチトルクTef分(エンジン9のフリクショントルク分)が負方向に作用した状態から、ハイブリッド駆動装置1の入力側の回転系におけるイナーシャトルクTiによって不足分トルク分が補われ、つまり合計トルクとしての出力トルクToutが要求トルクTr通りに出力される。
【0062】
そして、時点t2になると、「エンジン始動フェーズ」を開始する。すると、エンジン制御手段104が「エンジン点火制御」を行って、エンジン9を点火し(S4)、エンジントルクTeを要求トルクTrまで上昇する(S5)と共に、モータ制御手段102が「モータトルク制御」を行って、モータトルクTmを要求トルクTrからエンジントルクTeを減算した値(ここではエンジントルクTeにより要求トルクTrを全て出力するのでモータトルクTmは0)にし(S6)、更に、クラッチ制御手段103が「クラッチトルク制御」を行って、クラッチトルクTcがクラッチ完全係合トルクとなるように制御され(S7)、つまりクラッチ4が完全係合状態とされる。
【0063】
なお、その後は、エンジン9のエンジントルクTeを主として、モータ2によるモータトルクTmによりアシスト乃至回生を適宜に行いつつ要求トルクTrとなるように制御し、変速比は、エンジン9が最適燃費曲線になるべく近づくように適宜に制御されることになる。
【0064】
[本実施の形態のまとめ]
以上説明したように本ハイブリッド駆動装置1の制御装置100によると、始動時アップシフト制御手段107が、エンジン始動制御手段105によるクラッチ4の係合制御に合わせて、変速制御手段101に指令してコーンリング式の変速機構3の変速比をアップシフト変速して、比較的重量が重いインプットコーン22、モータ2のロータ、及び入力軸6の回転速度を低下させることで、それらインプットコーン22、モータ2のロータ、及び入力軸6の減速による十分な大きさのイナーシャトルクTiを発生させるので、エンジン9の始動時に、モータ2のモータトルクTmに上記イナーシャトルクTiを加えた出力トルクToutを駆動車輪10に出力することができる。これにより、例えばEV走行領域を縮小することなく(エンジン始動時にモータ2が最大トルクとなる限界付近までEV走行領域として用いることができ)、エンジン始動時に生じるヘジテーションの低減を図ることができる。
【0065】
また、始動時アップシフト制御手段107が、要求トルクTrとモータ2のモータトルクTmとに基づき、アップシフト変速における変速速度を制御することで、発生するイナーシャトルクTiの大きさを制御することができるので、インプットコーン22、モータ2のロータ、及び入力軸6の減速によるイナーシャトルクTiを要求トルクTrに応じて出力することができ、エンジン始動時に生じる出力トルクToutの変動を精度良く抑制することができる。
【0066】
なお、以上説明した本実施の形態においては、モータ2をエンジン9と変速機構3との間に1つ備えたハイブリッド駆動装置1を一例に説明したが、これに限らず、例えば出力軸24等に駆動連結された第2モータを備えたり、駆動車輪10にインホイールモータを備えたようなハイブリッド駆動装置であっても構わない。
【0067】
また、本実施の形態においては、エンジン始動時にあって、モータトルクTmを上昇して上乗せ分Tmupを出力しているが(図3のS6,図5参照)、コーンリング式の変速機構3における入力側の回転系、特にインプットコーン22やモータ2のロータは重量物であるので、モータトルクTmを上乗せせずに、アップシフト変速によるイナーシャトルクTiだけでクラッチトルクTcの負方向トルクを穴埋めし、ヘジテーションを無くすように構成してもよい。
【符号の説明】
【0068】
1 ハイブリッド駆動装置
2 モータ
3 変速機構
4 クラッチ
6 入力部材(入力軸)
9 エンジン
10 駆動車輪
22 インプットコーン
23 アウトプットコーン
25 リング
39r,39l 出力部材(アスクル軸)
100 ハイブリッド駆動装置の制御装置(制御部)
101 変速制御手段
102 モータ制御手段
103 クラッチ制御手段
105 エンジン始動制御手段
106 エンジン始動判定手段
107 始動時アップシフト制御手段
108 要求トルク検出手段
Tm 駆動トルク
Tr 要求トルク
【技術分野】
【0001】
本発明は、例えば変速機構と、該変速機構の入力部材に駆動連結されたモータと、エンジンと該入力部材との間に介在するクラッチとを制御するハイブリッド駆動装置の制御装置に係り、詳しくは、エンジンの始動時にクラッチを係合して該エンジンの回転上昇を行うハイブリッド駆動装置の制御装置に関する。
【背景技術】
【0002】
近年、環境問題の取り組み等から、車両の燃費向上を図ったハイブリッド駆動装置が種々開発されている。このようなハイブリッド駆動装置の中には、変速機構と、該変速機構の入力部材に駆動連結されたモータと、エンジンと該入力部材との間に介在するクラッチとを備えた、いわゆる1モータ・パラレル型のハイブリッド駆動装置が提案されている(特許文献1参照)。
【0003】
上記特許文献1のものは、クラッチを解放してエンジンを切離した状態で、モータによるEV走行を行うことを可能としており、例えばこのEV走行中において運転者が要求する要求トルクがモータトルクよりも大きくなると(アクセル開度が所定の低下開度領域を出るとき)、エンジンの始動を判定し、エンジン及びモータの駆動力による走行状態に移行する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−82260号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、上記特許文献1のような1モータ・パラレル型のハイブリッド駆動装置にあって、モータのみの駆動力によるEV走行中からエンジンを始動する場合には、クラッチを係合しつつモータの駆動力によってエンジンの回転数を上昇させた後、該エンジンの燃焼を開始している。
【0006】
このエンジンの始動において、特許文献1のものは、自動変速機のクラッチC1を解放することで、車両の惰性走行中にエンジンを始動し、エンジンのクランキング負荷が駆動車輪に伝達されることを防止して、減速ショックが生じることの防止を図っているが、エンジンを始動する必要がある場合は、例えば運転者がアクセルを踏み込んで車両としての出力トルクの増大(つまり車両の加速)を要求している場合が多いので、瞬間的に車両の加速が無くなることは、ドライバビリティとして違和感を生じる虞もある。
【0007】
しかし、例えばクラッチC1を解放せずに、モータと駆動車輪とが駆動伝達状態にあったとしても、エンジンの回転数を上昇するためにモータの駆動力の一部が用いられるので、瞬間的に車両の加速が鈍る、いわゆるヘジテーションが生じてしまう。
【0008】
このヘジテーションの発生を防止するためには、EV走行中にあって、常時モータにエンジン始動のための余力を残しておくことが考えられるが、そのためには、エンジン始動タイミングを早めるようにEV走行領域を縮小する必要があり、エンジン始動の頻度が多くなり、車両の燃費向上の妨げになるという問題がある。
【0009】
そこで本発明は、EV走行領域を縮小することなく、かつエンジン始動時に生じるヘジテーションの低減を図ることが可能なハイブリッド駆動装置の制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0010】
本発明は(例えば図1乃至図5参照)、入力部材(6)に接続される円錐形状のインプットコーン(22)と、駆動車輪(10)に駆動連結される出力部材(39r,39l)に接続されると共に該インプットコーン(22)と平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置された円錐形状のアウトプットコーン(23)と、前記インプットコーン(22)又は前記アウトプットコーン(23)を囲むように配置されかつ該インプットコーン(22)と該アウトプットコーン(23)が対向する傾斜面に挟持されるリング(25)と、を有する変速機構(3)の変速比を、該リング(25)を軸方向に移動制御することで変速制御する変速制御手段(101)と、
前記入力部材(6)に駆動連結されるモータ(2)を駆動制御するモータ制御手段(102)と、
エンジン(9)と前記入力部材(6)との間に介在するクラッチ(4)を係合制御するクラッチ制御手段(103)と、
車両走行中に前記クラッチ(4)を解放して前記エンジン(9)を停止している状態から、前記エンジン(9)の始動を判定するエンジン始動判定手段(106)と、
前記エンジン始動判定手段(106)により前記エンジン(9)の始動が判定された際に、前記クラッチ制御手段(103)に指令して前記クラッチ(4)を係合制御しつつ該クラッチ(4)のトルク容量を上昇していくことで前記入力部材(6)の回転に基づき前記エンジン(9)の回転速度を上昇させ、前記エンジン(9)の燃焼を開始させるエンジン始動制御手段(105)と、
前記エンジン始動制御手段(105)による前記クラッチ(4)の係合制御時に、前記変速制御手段(101)に指令して前記変速機構(3)の変速比をアップシフト変速する始動時アップシフト制御手段(107)と、を備えたことを特徴とするハイブリッド駆動装置(1)の制御装置(100)で構成される。
【0011】
また、本発明は(例えば図1参照)、運転者の要求トルク(Tr)を検出する要求トルク検出手段(108)を備え、
前記始動時アップシフト制御手段(107)は、前記要求トルク(Tr)と前記モータ(2)の駆動トルク(Tm)とに基づき、前記アップシフト変速における変速速度を制御することを特徴とする。
【0012】
なお、上記カッコ内の符号は、図面と対照するためのものであるが、これは、発明の理解を容易にするための便宜的なものであり、特許請求の範囲の構成に何等影響を及ぼすものではない。
【発明の効果】
【0013】
請求項1に係る本発明によると、始動時アップシフト制御手段が、エンジン始動制御手段によるクラッチの係合制御に合わせて、変速制御手段に指令してコーンリング式の変速機構の変速比をアップシフト変速して、比較的重量が重いインプットコーン、モータのロータ、及び入力部材の回転速度を低下させることで、それらインプットコーン、モータのロータ、及び入力部材の減速による十分な大きさのイナーシャトルクを発生させるので、エンジンの始動時に、モータの駆動トルクに上記イナーシャトルクを加えた出力トルクを駆動車輪に出力することができる。これにより、例えばEV走行領域を縮小することなく、エンジン始動時に生じるヘジテーションの低減を図ることができる。
【0014】
請求項2に係る本発明によると、始動時アップシフト制御手段が、要求トルクとモータの駆動トルクとに基づき、アップシフト変速における変速速度を制御することで、発生するイナーシャトルクの大きさを制御することができるので、インプットコーン、モータのロータ、及び入力部材の減速によるイナーシャトルクを要求トルクに応じて出力することができ、エンジン始動時に生じる出力トルクの変動を精度良く抑制することができる。
【図面の簡単な説明】
【0015】
【図1】本実施の形態に係るハイブリッド駆動装置の制御装置の概略構成を示すブロック図。
【図2】本ハイブリッド駆動装置の構成を示すスケルトン図。
【図3】本ハイブリッド駆動装置の制御装置による制御を示すメインフローチャート。
【図4】アップ変速処理の制御を示すサブフローチャート。
【図5】エンジン始動時における走行例を示すタイムチャート。
【発明を実施するための形態】
【0016】
[ハイブリッド駆動装置の概略構成]
以下、本発明に係る実施の形態を図1乃至図5に沿って説明する。まず、本発明に係るハイブリッド駆動装置1を搭載した車両の駆動系を図1及び図2に沿って説明する。図1に示すように、ハイブリッド駆動装置1は、エンジン(E/G)9と駆動車輪10との間に介在するように配置されており、入力軸(入力部材)6とディファレンシャル装置5を介して駆動車輪10に駆動連結されるアスクル軸(出力部材)39r,39lとの間の変速比を変速する変速機構(T/M)3と、該入力軸6に駆動連結されるモータ・ジェネレータ(M/G)2と、エンジン9と入力軸6との間に介在するクラッチ4とを備えて構成されている。
【0017】
詳細には、図2に示すように、クラッチ4は、乾式単板クラッチからなり、エンジン出力軸54に連結されているクラッチディスク4a及び入力軸6にダンパスプリング55を介して連結されている出力側となるプレッシャプレート4bを有し、プレッシャプレート4bは、ダイヤフラムスプリング56により常時クラッチディスク4aに接続するように付勢されている。また、レリーズベアリング57が上記プレッシャプレート4bの中心部分に回転自在に当接しており、該ベアリング57がレリーズフォーク58により押圧されることにより、上記クラッチ4が切操作される。レリーズフォーク58は、ロッド53を介してウォームホイール50に連結されており、該ホイール50には電動アクチュエータである電気モータA1の出力軸に連動されているウォーム52が噛合している。
【0018】
上記電気モータA1、ウォーム52、ウォームホイール50及びロッド53は、クラッチ操作部51を構成しており、上記電動アクチュエータ(電気モータ)A1に基づく該クラッチ操作部51の操作により上記クラッチ4を係合・解放操作すると共に、上記非可逆機構からなるウォーム52及びウォームホイール50が介在して、電気モータA1が停止した状態でのクラッチ4の操作位置(係合又は解放)に保持される。
【0019】
モータ・ジェネレータ(以下、単に「モータ」という)2は、ステータ(不図示)とモータ出力軸8に設けられたロータ(不図示)とを有し、モータ出力軸8は、両端部が不図示のケース部材にベアリングを介して回転自在に支持されている。モータ出力軸8の一方側には、歯車(ピニオン)からなる出力ギヤ16が形成されており、該出力ギヤ16はアイドラ歯車17を介して入力軸6に設けられた中間ギヤ19に噛合して、これら出力ギヤ16、アイドラ歯車17、及び中間ギヤ19によってモータ2と入力軸6とを駆動連結するギヤ伝動装置7を構成している。
【0020】
変速機構3は、いわゆる無段変速機構であるコーンリング式CVTからなり、入力軸6に接続されて入力側となる円錐形状のインプットコーン22と、出力側となる同じく円錐形状のアウトプットコーン23と、金属製のリング25とからなる。アウトプットコーン23は、インプットコーン22と平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置されており、上記リング25が、これら両コーン22,23の対向する傾斜面に挟持されるようにかつ両コーンのいずれか一方(本実施の形態ではインプットコーン22)を取囲むように配置されている。これら両コーン22,23は例えば鋼鉄製からなり、比較的重量の重い重量物からなるので、回転変化時には比較的大きなイナーシャトルクが出る。
【0021】
両摩擦車の少なくとも一方には大きなスラスト力が作用しており、上記リング25は上記スラスト力に基づく比較的大きな挟圧力により挟持されている。具体的には、アウトプットコーン23と無段変速装置出力軸24との間には軸方向で対向する面にボールを介在した傾斜カム機構からなる軸力付与機構28が配設されており、該軸力付与機構28は、アウトプットコーン23に、伝達トルクに応じたスラスト力を付与し、該スラスト力に対抗する方向に支持されているインプットコーン22との間でリング25に大きな挟圧力を付与する。
【0022】
上記リング25は、例えば電動アクチュエータである電気モータA2によって軸方向に移動駆動(移動制御)されると共に該リング25を回転自在に支持する移動部材を備えた変速操作機構60によって、両コーン22,23に対する軸方向位置が位置制御され、それによって、両コーン22,23に対する接触半径を変更することで、両コーン22,23の間で変速比を変更する。
【0023】
そして、上記アウトプットコーン23に駆動連結された無段変速装置出力軸24にはギヤ(ピニオン)44が形成されており、該歯車44にはディファレンシャル装置5のデフリングギヤ41が噛合している。ディファレンシャル装置5は、該デフリングギヤ41に伝達された回転を、左右の差回転を吸収しつつ左右のアクスル軸39l,39rに出力し、それらアクスル軸39l,39rに駆動連結された左右駆動車輪10に伝達する。
【0024】
[ハイブリッド駆動装置の制御装置について]
ついで、本発明に係るハイブリッド駆動装置1の制御装置100について図1、図3及び図4に沿って説明する。図1に示すように、本ハイブリッド駆動装置1の制御装置(制御部(ECU))100は、変速制御手段101、モータ制御手段102、クラッチ制御手段103、エンジン制御手段104、エンジン始動制御手段105、エンジン始動判定手段106、始動時アップシフト制御手段107、要求トルク検出手段108などを備えている。
【0025】
また、制御部100には、エンジン回転数Neを検出するエンジン回転数センサ91、入力軸6の回転数(モータ2の回転数)を検出する入力軸(モータ)回転数センサ92、アスクル軸39r,39l或いは無段変速装置出力軸24の回転数(即ち車速)を検出する出力軸回転数(車速)センサ93、不図示のアクセルペダルの踏込量(アクセル開度)を検出するアクセル開度センサ94などが接続されている。
【0026】
なお、本実施の形態では、便宜的に、変速制御手段101、モータ制御手段102、クラッチ制御手段103、エンジン制御手段104などを同じ制御部(ECU)100内に備えたものとして説明しているが、各手段を2個以上の制御部(ECU)で相互に通信可能に構成してもよく、それぞれ個別の制御部(ECU)を備えているような形態であってもよい。
【0027】
上記変速制御手段101は、走行中にあって、例えば出力軸回転数センサ93により検出される車速とアクセル開度センサ94により検出されるアクセル開度(要求トルク検出手段108により検出される運転者の要求トルクTr)とに基づき、エンジン9における燃料消費やモータ2における電力消費が最適となるように(要求された駆動力を出力しつつ燃費が良好となるように)あらかじめ準備された不図示のマップ等を参照することで、随時最適な変速比を判定し、上記電気モータA2を駆動制御して変速機構3の変速比を変速制御する。
【0028】
上記モータ制御手段102は、モータ2の駆動力のみを用いて走行するEV走行中にあっては、要求トルク検出手段108により検出される運転者の要求トルクTrが駆動車輪10から出力されるようにモータ2の駆動トルク(以下、「モータトルク」という)Tmの大きさを制御し、また、エンジン9の駆動力を用いて走行するエンジン走行中にあっては、エンジン9の出力トルク(以下、「エンジントルク」という)TeとモータトルクTmとの合計が駆動車輪10から出力される要求トルクTrとなるように、モータトルクTmの大きさ(力行・回生を含む)を制御する。なお、モータ制御手段102は、モータ2を定電力制御することで、モータ回転数(変速機構3の変速比)に拘らず、駆動車輪10に出力するモータトルクTmの大きさを一定に制御し得る。
【0029】
上記クラッチ制御手段103は、上記EV走行中にあっては、上記電気モータA1を駆動制御してクラッチ4を解放するように制御し、上記エンジン走行中にあっては、上記電気モータA1を駆動制御してクラッチ4を係合するように制御する。また、詳しくは後述するように、エンジン9の始動時には、クラッチ4をスリップ制御して該クラッチ4の伝達トルク容量(以下、「クラッチトルク」)Tcを制御し、エンジン回転数Ne(エンジン9の回転速度)を上昇させるように制御する。なお、本ハイブリッド駆動装置1にあって後進走行する場合には、クラッチ4は解放制御して、モータ2を逆転回転させることで駆動車輪10の後進回転を達成する。
【0030】
上記エンジン制御手段104は、エンジン走行中にあって、エンジン9におけるスロットル開度や燃料噴射量の制御などを行って、エンジントルクTeやエンジン回転数Neを自在に制御する。また、エンジン制御手段104は、詳しくは後述するエンジン始動時にあって、エンジン始動制御手段105からの指令に基づきエンジン9の点火制御を行う。
【0031】
上記エンジン始動判定手段106は、クラッチ4を解放してエンジン9を停止している状態のEV走行中(車両走行中)にあって、要求トルク検出手段108により検出される運転者の要求トルクTr(つまりアクセル開度)が、例えば不図示のマップ等により参照されるモータ2により走行可能なEV走行可能領域を超えた場合に、エンジン9の駆動力が必要と判断し、エンジン始動を判定する。
【0032】
上記エンジン始動制御手段105は、エンジン始動判定手段106によりエンジン9の始動が判定された際に、クラッチ制御手段103に指令してクラッチ4を係合制御しつつ該クラッチ4のトルク容量を上昇していくことで入力軸6の回転に基づきエンジン回転数Neを上昇させ、エンジン制御手段104に指令してエンジン9の燃焼(点火)を開始させる。
【0033】
上記始動時アップシフト制御手段107は、詳しくは後述するように、エンジン始動制御手段105からクラッチ制御手段103に指令されたクラッチ4の係合制御に合わせて、変速制御手段101に指令して変速機構3の変速比をアップシフト変速して入力軸6の回転数を低下させることで、ハイブリッド駆動装置1の入力側の回転部材(即ちインプットコーン22、入力軸6、ギヤ伝動装置7、モータ出力軸8、及びモータ2のロータなど)にてイナーシャトルクを発生させる。
【0034】
[エンジン始動時のアップシフト制御について]
ついで、上記制御部100によるエンジン始動時の制御について、図1を参照しつつ図3及び図4のフローチャートに沿って詳細に説明する。
【0035】
図3に示すように、例えば車両走行が開始された状態、特にEV走行状態にあっては、本エンジン始動時制御が開始され(S1)、エンジン始動判定手段106がエンジン9の始動を判定していない場合は、該エンジン始動判定手段106からエンジン始動要求フラグが出力されないので(フラグOFFであるので)(S2のNO)、そのままリターンして(S13)、エンジン始動判定手段106によりエンジン始動が判定されるまで待機する。
【0036】
上述のように、要求トルク検出手段108により検出される運転者の要求トルクTrが、モータ2により走行可能なEV走行可能領域を超えると、エンジン始動判定手段106によりエンジン始動が判定され、該エンジン始動判定手段106はエンジン始動要求をONし(S2のYES)、ステップS3に進む。
【0037】
{エンジン回転上昇フェーズ}
ステップS3に進むと、エンジン始動制御手段105は、入力軸6の回転数(インプット回転数Nin)とエンジン回転数Neとの差回転が所定の係合判定差回転数(クラッチ4が係合状態にあると判定できる回転数)より小さいか否かを判定し、ここではエンジン9が停止したEV走行状態であるので、インプット回転数Ninとエンジン回転数Neとの差回転が上記係合判定差回転より大きい(クラッチ4が解放状態にあって差回転が大きい)ので(S3のNO)、「エンジン回転上昇フェーズ」に入り、クラッチ制御手段103によりクラッチ4のクラッチトルクTcを制御する「クラッチトルク制御」(S10)に進む。
【0038】
「クラッチトルク制御」に進むと、クラッチ制御手段103は、クラッチトルクTcの大きさをエンジン9のフリクショントルク(エンジン9の内部摩擦抵抗やエンジンイナーシャトルク)よりも僅かに大きいエンジン始動用クラッチトルクTefに設定し、クラッチ制御手段103は、電気モータA1に指令して該設定されたエンジン始動用クラッチトルクTefにクラッチトルクTcが上昇するようにクラッチ4を徐々にスリップ係合制御する。これにより、クラッチトルクTcがエンジン9のフリクショントルクよりも大きくなるので、徐々にエンジン回転数Neが入力軸6の回転によって上昇されることになる。
【0039】
上記「クラッチトルク制御」に続いて、モータ制御手段102によりモータトルクTmを制御する「モータトルク制御」(S11,S12)が行われる。即ち、モータ制御手段102は、モータトルクTmを、要求トルク検出手段108により検出される要求トルクTrに上記設定されたクラッチトルクTc(エンジン始動用クラッチトルク)を加算した値に設定し、モータ2に対して該設定したモータトルクTmを出力するように指令する(S11)。しかし、実際には、モータ2の出力性能限界があるので、EV走行していた際のモータトルクに出力性能の限界であるモータ最大トルクで制限された形で、上乗せトルクTmupを加算したモータトルクTmを出力し(S12)、例えばその後、要求トルクTrが上昇すると、後述するように不足トルクが生じることになる(S100−3参照)。
【0040】
上記「モータトルク制御」に続いて、始動時アップシフト制御手段107により変速機構3の変速比をアップシフト制御する「変速制御」が行われる。即ち、この「変速制御」においては、図4に示すように、始動時アップシフト制御手段107によって「アップ変速処理」の制御が行われる。
【0041】
「アップ変速処理」が開始されると(S100−1)、まず、始動時アップシフト制御手段107は、入力軸6の回転数(インプット回転数Nin)がエンジン始動目標回転数よりも大きいか否かを判定する(S100−2)。インプット回転数Ninがエンジン始動目標回転数よりも小さい場合は(S100−2のNO)、つまりこれ以上アップシフトしてしまうと、インプット回転数Ninがエンジン始動目標回転数よりも低くなって、クラッチ4を係合した際に、エンジン9が低回転となってエンジン始動が困難となるので、アップシフトは行わず、ステップS100−7に進む。
【0042】
ステップS100−7に進んだ場合は、インプット回転数Ninがエンジン始動目標回転数となるように、該エンジン始動目標回転数を実際のアウトプット回転数Noutで除算した値を、変速比の指令値(レシオ指令値)として設定し、変速制御手段101によって電気モータA2に指令する形で、変速機構3の変速比を該設定したレシオ指令値となるように制御する。この場合、インプット回転数Ninの大きさによっては、ダウンシフトすることもある。
【0043】
また、モータトルクTmを上昇しても、モータ2の性能限界によって、要求トルクTrにクラッチトルクTcを加算した値まで上昇できない場合は、駆動車輪10に出力されるトルクが僅かに不足して、エンジン始動に伴うヘジテーションが発生することになるが、エンジン回転数Neは、上記設定されたレシオ指令値に基づく変速比で回転するインプット回転数Ninにクラッチ4の係合に伴って上昇されるため、エンジン始動目標回転数まで上昇されて、エンジン始動は達成される。
【0044】
一方、上記ステップS100−2において、インプット回転数Ninがエンジン始動目標回転数よりも大きい場合は(S100−2のYES)、インプット回転数Ninがエンジン始動目標回転数になるまでアップシフトすることが可能であるので、始動時アップシフト制御手段107は、上記モータ2の出力性能限界によって要求トルクTrに対して不足した分をアップシフト時のイナーシャトルクで補うため、アップシフトする際のレシオ指令値の算出し、変速制御手段101から電気モータA2に指令する形で、変速機構3の変速比を制御する。
【0045】
詳細には、ステップS100−3において、まず、上記クラッチトルクTcから現在のモータトルクTm(EV走行していた際のモータトルクに出力性能の限界まで上乗せ分を加算したモータトルクTm)を減算した値に実際の変速比(例えば入力軸回転数センサ92により検出される実インプット回転数Ninを出力軸回転数センサ93により検出される実アウトプット回転数Noutで除算した値)を乗算した値を、要求トルク検出手段108により検出される要求トルクTrに加算し、駆動車輪10における不足分のトルクを算出する。
【0046】
次に、ステップS100−4において、上記算出した不足分のトルクを実際の変速比で除算し、不足分のトルクをインプットトルクに換算し、つまり不足分を補うトルクとして必要なインプットイナーシャトルクを算出する。続いて、ステップS100−5において、上記算出されたインプットイナーシャトルクをインプットイナーシャ(上述した変速機構3の入力側の回転部材の重量)で除算して、単位系(例えば毎分を毎秒に合わせるために60を乗算し、角加速度に合わせるために2πを除算する)を整えて、上記必要なインプットイナーシャトルクを実現するインプット角加速度を算出する。
【0047】
そして、ステップS100−6において、実インプット回転数Ninと上記インプット角加速度に所定の制御周期(ステップS100−6が繰り返される周期)Δtを乗算した値とを加算した値を、実アウトプット回転数Noutで除算することで、次に変速機構3に指令すべきレシオ指令値を算出し、この算出したレシオ指令値を、変速制御手段101から電気モータA2に指令する形で変速機構3に指令し、変速比を不足分のトルクを補うイナーシャトルクTiが出力されるようにアップシフト制御する。
【0048】
以上の制御を、インプット回転数Ninとエンジン回転数Neとの差回転が所定の係合判定差回転数より小さくなるまで(つまりクラッチ4の差回転が略々無くなって係合状態となるまで)繰り返すことで(即ち図3のS1,S2のYES、S3のNO、S10,S11,S12,S100,S13)、運転者の要求トルクTrにクラッチトルクTc(エンジンフリクショントルク)が加わった値に対してモータトルクTm(EV走行時のモータトルクに上乗せしたトルクTmup)で不足したトルクを、アップシフト変速の変速速度を制御する形で(変速比を制御周期毎に変更することで)、随時イナーシャトルクTiによって補うことができるので、駆動車輪10から出力される出力トルクToutが要求トルクTr通り出力され、ヘジテーションが生じることが防止される。
【0049】
{エンジン始動フェーズ}
図3に示すように、上記ステップS3において、インプット回転数Ninとエンジン回転数Neとの差回転が所定の係合判定差回転数より小さくなったことを判定すると(S3のYES)、「エンジン始動フェーズ」に入り、エンジン始動制御手段105によりエンジン9を点火して始動する「エンジン点火制御」(S4,S5,S6,S7,S8)に進む。「エンジン点火制御」に進むと、エンジン始動制御手段105は、まず、エンジン点火フラグをONし(S4)、エンジントルクTeを上記運転者の要求トルクTrに設定する(S5)。
【0050】
上記「エンジン点火制御」に続いて、モータ制御手段102によりモータトルクTmを制御する「モータトルク制御」(S6)が行われる。即ち、この状態では、運転者の要求トルクTrが例えば一定であるのに、エンジントルクTeが上昇していくので、それに合わせてモータトルクTmを設定する必要があり、つまり要求トルクTrからエンジントルクTeを減算した値をモータトルクTmとして設定し、モータ2に対して該設定したモータトルクTmを出力するように指令する。
【0051】
上記「モータトルク制御」に続いて、クラッチ制御手段103によりクラッチトルクTcを制御する「クラッチトルク制御」が行われる。即ち、この「クラッチトルク制御」においては、クラッチトルクTcを、クラッチ4が完全係合状態となるようなクラッチ完全係合トルクに設定し、つまりクラッチ制御手段103によりクラッチ4が完全係合状態となるように制御される(S7)。
【0052】
上記「クラッチトルク制御」に続いて、変速制御手段101により変速機構3の変速比を制御する「変速制御」が行われる。即ち、この「変速制御」においては、エンジン9をエンジン始動目標回転数に維持するため、エンジン始動目標回転数を上記出力軸回転数センサ93により検出される実アウトプット回転数で除算した値を、次に変速機構3に指令すべきレシオ指令値として算出し、変速制御手段101から変速機構3に指令して、つまり入力軸6の回転数が車速V(出力軸回転数)に応じてエンジン始動目標回転数となるように変速制御される。
【0053】
以上の制御(S4,S5,S6,S7,S8)により、運転者の要求トルクTrを出力する駆動源として、徐々にモータ2からエンジン9に切換り、エンジントルクTeによって要求トルクTrが出力されるようになり、つまりEV走行からエンジン走行に切換えられていく。
【0054】
その後は、エンジン始動判定手段106によってエンジン始動要求フラグがOFFされ(S9)、ステップS2においてエンジン始動要求フラグのONが検出されなくなり(S2のNO)、つまりEV走行からエンジン走行に完全に切換えられた状態となる。
【0055】
[エンジン始動時における走行例]
ついで、エンジン始動時における走行例を、図1乃至図4を参照しつつ図5のタイムチャートに沿って説明する。
【0056】
例えばEV走行中から、運転者がアクセルを徐々に踏み込んでいくような(アクセル開度が徐々に大きくされていくような)走行状態にあって、要求トルク検出手段108により徐々に大きくされていく要求トルクTrが検出されている状態では、モータ制御手段102によりモータ2が制御されて該要求トルクTrに応じてモータトルクTmが出力され、車両が加速して車速Vが上昇していくと共に、インプット回転数(入力軸回転数)Nin(モータ回転数Nm)も上昇していく。
【0057】
時点t1において、例えば所定の車速Vに到達し、エンジン始動判定手段106がモータ2の出力限界(モータ最大トルクから上乗せトルクTmupを減算した値)に到達したことに基づきエンジン9の始動を判定し、エンジン始動要求フラグをONにする(S2のYES)。すると、エンジン始動制御手段105は、インプット回転数Ninとエンジン回転数Neとの差回転数が、クラッチ4が係合しているか否かを判定する係合判定差回転数よりも大きいので(つまりクラッチ4が係合していないので)(S3のNO)、「エンジン回転上昇フェーズ」を開始する。
【0058】
すると、クラッチ制御手段103は「クラッチトルク制御」を行って(S10)、クラッチトルクTcがエンジン9のフリクショントルクよりも僅かに大きなエンジン始動用クラッチトルクTefとなるようにクラッチ4をスリップ係合し、続けてモータ制御手段102が「モータトルク制御」を行って(S11,S12)、要求トルクTrに基づき出力していたモータトルクTmに加えて、モータ2の最大トルクまで上乗せしたトルクTmupを出力する。
【0059】
その後、時点t1から時点t2までにあって、運転者によりアクセルが更に踏み込まれて要求トルクTrが上昇すると、モータ2が上乗せトルクTmupを出力して最大トルクの出力状態であり、かつクラッチトルクTcがエンジン始動用クラッチトルクTefとなって負方向に作用する分、モータ2の出力トルクだけでは要求トルクTrを出力することができず、このままでは出力トルクToutが、図5中破線で示すように要求トルクTrより離れて、つまりヘジテーションを生じることになる。
【0060】
そこで、始動時アップシフト制御手段107は、変速制御手段101に指令する形で「変速制御」を行って「アップ変速処理」を開始し(S100)、不足分のトルクに見合うイナーシャトルクTiが出力されるように変速機構3をアップシフト変速する。このため、入力軸回転数Ninが低下していくと共に変速比も下降していき、インプット角加速度も負方向に低下(つまり減速)される。
【0061】
これにより、出力トルクToutは、モータ2の上乗せトルクTmup(モータ最大トルク)が出力された状態で、かつクラッチ4を係合してエンジン始動用クラッチトルクTef分(エンジン9のフリクショントルク分)が負方向に作用した状態から、ハイブリッド駆動装置1の入力側の回転系におけるイナーシャトルクTiによって不足分トルク分が補われ、つまり合計トルクとしての出力トルクToutが要求トルクTr通りに出力される。
【0062】
そして、時点t2になると、「エンジン始動フェーズ」を開始する。すると、エンジン制御手段104が「エンジン点火制御」を行って、エンジン9を点火し(S4)、エンジントルクTeを要求トルクTrまで上昇する(S5)と共に、モータ制御手段102が「モータトルク制御」を行って、モータトルクTmを要求トルクTrからエンジントルクTeを減算した値(ここではエンジントルクTeにより要求トルクTrを全て出力するのでモータトルクTmは0)にし(S6)、更に、クラッチ制御手段103が「クラッチトルク制御」を行って、クラッチトルクTcがクラッチ完全係合トルクとなるように制御され(S7)、つまりクラッチ4が完全係合状態とされる。
【0063】
なお、その後は、エンジン9のエンジントルクTeを主として、モータ2によるモータトルクTmによりアシスト乃至回生を適宜に行いつつ要求トルクTrとなるように制御し、変速比は、エンジン9が最適燃費曲線になるべく近づくように適宜に制御されることになる。
【0064】
[本実施の形態のまとめ]
以上説明したように本ハイブリッド駆動装置1の制御装置100によると、始動時アップシフト制御手段107が、エンジン始動制御手段105によるクラッチ4の係合制御に合わせて、変速制御手段101に指令してコーンリング式の変速機構3の変速比をアップシフト変速して、比較的重量が重いインプットコーン22、モータ2のロータ、及び入力軸6の回転速度を低下させることで、それらインプットコーン22、モータ2のロータ、及び入力軸6の減速による十分な大きさのイナーシャトルクTiを発生させるので、エンジン9の始動時に、モータ2のモータトルクTmに上記イナーシャトルクTiを加えた出力トルクToutを駆動車輪10に出力することができる。これにより、例えばEV走行領域を縮小することなく(エンジン始動時にモータ2が最大トルクとなる限界付近までEV走行領域として用いることができ)、エンジン始動時に生じるヘジテーションの低減を図ることができる。
【0065】
また、始動時アップシフト制御手段107が、要求トルクTrとモータ2のモータトルクTmとに基づき、アップシフト変速における変速速度を制御することで、発生するイナーシャトルクTiの大きさを制御することができるので、インプットコーン22、モータ2のロータ、及び入力軸6の減速によるイナーシャトルクTiを要求トルクTrに応じて出力することができ、エンジン始動時に生じる出力トルクToutの変動を精度良く抑制することができる。
【0066】
なお、以上説明した本実施の形態においては、モータ2をエンジン9と変速機構3との間に1つ備えたハイブリッド駆動装置1を一例に説明したが、これに限らず、例えば出力軸24等に駆動連結された第2モータを備えたり、駆動車輪10にインホイールモータを備えたようなハイブリッド駆動装置であっても構わない。
【0067】
また、本実施の形態においては、エンジン始動時にあって、モータトルクTmを上昇して上乗せ分Tmupを出力しているが(図3のS6,図5参照)、コーンリング式の変速機構3における入力側の回転系、特にインプットコーン22やモータ2のロータは重量物であるので、モータトルクTmを上乗せせずに、アップシフト変速によるイナーシャトルクTiだけでクラッチトルクTcの負方向トルクを穴埋めし、ヘジテーションを無くすように構成してもよい。
【符号の説明】
【0068】
1 ハイブリッド駆動装置
2 モータ
3 変速機構
4 クラッチ
6 入力部材(入力軸)
9 エンジン
10 駆動車輪
22 インプットコーン
23 アウトプットコーン
25 リング
39r,39l 出力部材(アスクル軸)
100 ハイブリッド駆動装置の制御装置(制御部)
101 変速制御手段
102 モータ制御手段
103 クラッチ制御手段
105 エンジン始動制御手段
106 エンジン始動判定手段
107 始動時アップシフト制御手段
108 要求トルク検出手段
Tm 駆動トルク
Tr 要求トルク
【特許請求の範囲】
【請求項1】
入力部材に接続される円錐形状のインプットコーンと、駆動車輪に駆動連結される出力部材に接続されると共に該インプットコーンと平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置された円錐形状のアウトプットコーンと、前記インプットコーン又は前記アウトプットコーンを囲むように配置されかつ該インプットコーンと該アウトプットコーンが対向する傾斜面に挟持されるリングと、を有する変速機構の変速比を、該リングを軸方向に移動制御することで変速制御する変速制御手段と、
前記入力部材に駆動連結されるモータを駆動制御するモータ制御手段と、
エンジンと前記入力部材との間に介在するクラッチを係合制御するクラッチ制御手段と、
車両走行中に前記クラッチを解放して前記エンジンを停止している状態から、前記エンジンの始動を判定するエンジン始動判定手段と、
前記エンジン始動判定手段により前記エンジンの始動が判定された際に、前記クラッチ制御手段に指令して前記クラッチを係合制御しつつ該クラッチのトルク容量を上昇していくことで前記入力部材の回転に基づき前記エンジンの回転速度を上昇させ、前記エンジンの燃焼を開始させるエンジン始動制御手段と、
前記エンジン始動制御手段による前記クラッチの係合制御時に、前記変速制御手段に指令して前記変速機構の変速比をアップシフト変速する始動時アップシフト制御手段と、を備えた、
ことを特徴とするハイブリッド駆動装置の制御装置。
【請求項2】
運転者の要求トルクを検出する要求トルク検出手段を備え、
前記始動時アップシフト制御手段は、前記要求トルクと前記モータの駆動トルクとに基づき、前記アップシフト変速における変速速度を制御する、
ことを特徴とする請求項1記載のハイブリッド駆動装置の制御装置。
【請求項1】
入力部材に接続される円錐形状のインプットコーンと、駆動車輪に駆動連結される出力部材に接続されると共に該インプットコーンと平行な軸線上に配置されかつ大径側と小径側とが軸方向逆向きになるように配置された円錐形状のアウトプットコーンと、前記インプットコーン又は前記アウトプットコーンを囲むように配置されかつ該インプットコーンと該アウトプットコーンが対向する傾斜面に挟持されるリングと、を有する変速機構の変速比を、該リングを軸方向に移動制御することで変速制御する変速制御手段と、
前記入力部材に駆動連結されるモータを駆動制御するモータ制御手段と、
エンジンと前記入力部材との間に介在するクラッチを係合制御するクラッチ制御手段と、
車両走行中に前記クラッチを解放して前記エンジンを停止している状態から、前記エンジンの始動を判定するエンジン始動判定手段と、
前記エンジン始動判定手段により前記エンジンの始動が判定された際に、前記クラッチ制御手段に指令して前記クラッチを係合制御しつつ該クラッチのトルク容量を上昇していくことで前記入力部材の回転に基づき前記エンジンの回転速度を上昇させ、前記エンジンの燃焼を開始させるエンジン始動制御手段と、
前記エンジン始動制御手段による前記クラッチの係合制御時に、前記変速制御手段に指令して前記変速機構の変速比をアップシフト変速する始動時アップシフト制御手段と、を備えた、
ことを特徴とするハイブリッド駆動装置の制御装置。
【請求項2】
運転者の要求トルクを検出する要求トルク検出手段を備え、
前記始動時アップシフト制御手段は、前記要求トルクと前記モータの駆動トルクとに基づき、前記アップシフト変速における変速速度を制御する、
ことを特徴とする請求項1記載のハイブリッド駆動装置の制御装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−201194(P2012−201194A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−66891(P2011−66891)
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月25日(2011.3.25)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]