
ハンドおよびロボット
【課題】部材の摩耗を抑えてメンテナンスの手間を軽減すること。
【解決手段】上記した課題を解決するために、基部であるプレートと、かかるプレートに配置され、半導体ウェハなどの基板の周縁部にそれぞれ接してかかる基板を把持する支持部であるところの把持爪を複数個備えたハンドおよびロボットにおいて、かかる把持爪の少なくとも1つは、基板の周縁部の当接を受けながら基板の周縁部に沿って回転するようにハンドおよびロボットを構成する。
【解決手段】上記した課題を解決するために、基部であるプレートと、かかるプレートに配置され、半導体ウェハなどの基板の周縁部にそれぞれ接してかかる基板を把持する支持部であるところの把持爪を複数個備えたハンドおよびロボットにおいて、かかる把持爪の少なくとも1つは、基板の周縁部の当接を受けながら基板の周縁部に沿って回転するようにハンドおよびロボットを構成する。
【発明の詳細な説明】
【技術分野】
【0001】
開示の実施形態は、ハンドおよびロボットに関する。
【背景技術】
【0002】
従来、半導体ウェハなどの円板状の基板を搬送する基板搬送用のロボットが知られている。かかるロボットは、把持爪のような把持部材を複数個備えるハンドを有しており、把持部材でハンド上に載置された基板の周縁部を挟みつけることによって、所定位置で基板を把持する。
【0003】
たとえば、特許文献1には、移動可能な把持部材である移動ガイドおよび固定された把持部材である固定ガイドを有するハンドを備え、基板を移動ガイドで固定ガイドの壁面へ押し付けることによって把持動作を行う基板搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−279068号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のハンドは、前述の押し付けなどを繰り返すことによって、把持部材を磨耗させやすいという問題があった。このため、把持部材の交換頻度が高く、メンテナンスに手間がかかっていた。
【0006】
実施形態の一態様は、上記に鑑みてなされたものであって、部材の摩耗を抑えてメンテナンスの手間を軽減することができるハンドおよびロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
実施形態の一態様に係るハンドは、基部と、前記基部に配置され、基板の周縁部にそれぞれ接して当該基板を把持する複数個の支持部とを備えたハンドであって、前記支持部の少なくとも一つは、前記基板の周縁部の当接を受けながら回転する。
【発明の効果】
【0008】
実施形態の一態様によれば、部材の摩耗を抑えてメンテナンスの手間を軽減することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、実施形態に係るロボットの構成例を示す図である。
【図2】図2は、実施形態に係るハンドの構成例を示す図である。
【図3】図3は、可動爪の動作を示す図である。
【図4A】図4Aは、固定爪の構成例を示す図である。
【図4B】図4Bは、固定爪の構成例を示す図である。
【図5A】図5Aは、ローラの動作を示す図である。
【図5B】図5Bは、ローラの動作を示す図である。
【図6A】図6Aは、変形例に係るハンドの構成例を示す図である。
【図6B】図6Bは、変形例に係るハンドの構成例を示す図である。
【図7】図7は、従来の固定爪の構成例を示す図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本願の開示するハンドおよびロボットの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0011】
また、以下では、主に、基板が半導体ウェハである場合について説明する。
【0012】
また、以下では、基板の周縁部を挟みつけて把持する把持部材を、主に「把持爪」と記載することとする。なお、「把持爪」の「把持」には、基板の周縁部を挟みつけるだけでなく、基板を所定位置において支持する意味を含むものとする。したがって、「把持爪」を「支持部」と言い換えてもよい。
【0013】
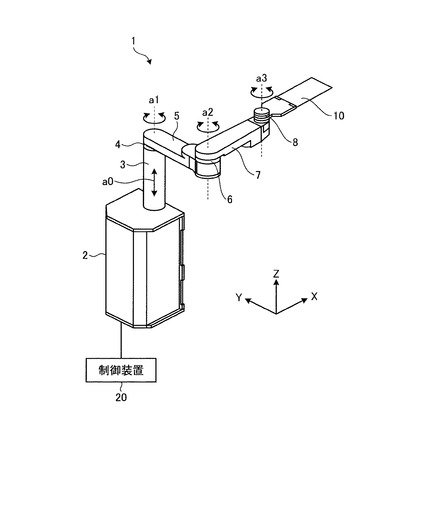
図1は、実施形態に係るロボット1の構成例を示す図である。なお、図1には、説明を分かりやすくするために、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。かかる直交座標系は、以下の説明に用いる他の図面においても示す場合がある。
【0014】
図1に示すように、ロボット1は、多関節ロボットであり、基台2と、アーム3、アーム5およびアーム7と、関節部4、関節部6および関節部8と、ハンド10とを備える。
【0015】
また、ロボット1には、制御装置20が接続されており、かかる制御装置20によってロボット1が行う基板の把持動作および搬送動作などが制御される。なお、かかる制御は、制御装置20にあらかじめ格納された教示データに基づいて行われる。
【0016】
アーム3は、基台2から鉛直方向(Z軸方向)にスライド可能に設けられる(図中の両矢印a0参照)。これにより、ハンド10は、鉛直方向へ昇降することができる。
【0017】
アーム5は、アーム3と関節部4を介して連結される。このとき、アーム5は、関節部4の回転軸a1まわりに回転自在に支持される(回転軸a1まわりの両矢印参照)。同様に、アーム7は、アーム5と関節部6を介して連結される。このとき、アーム7は、関節部6の回転軸a2まわりに回転自在に支持される(回転軸a2まわりの両矢印参照)。
【0018】
ハンド10は、載置された半導体ウェハなどの基板を把持するエンドエフェクタであり、アーム7の終端部に関節部8を介して連結される。このとき、ハンド10は、関節部8の回転軸a3まわりに回転自在に支持される(回転軸a3まわりの両矢印参照)。
【0019】
ここで、関節部4、関節部6および関節部8にはそれぞれ、アクチュエータやモータといった図示しない駆動機構が内蔵されており、かかる駆動機構の駆動によって、アーム5、アーム7およびハンド10はそれぞれ、図中のXY平面に沿った旋回動作を行う。
【0020】
なお、図1には、ハンド10を1つ備えるロボット1を例示したが、ハンド10の個数を限定するものではない。たとえば、複数個のハンド10を、アナログ時計の長針および短針のように、回転軸a3について重ねて設けることとしてもよい。
【0021】
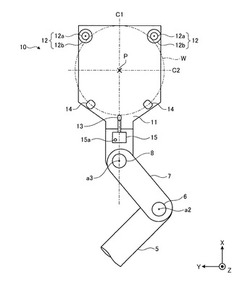
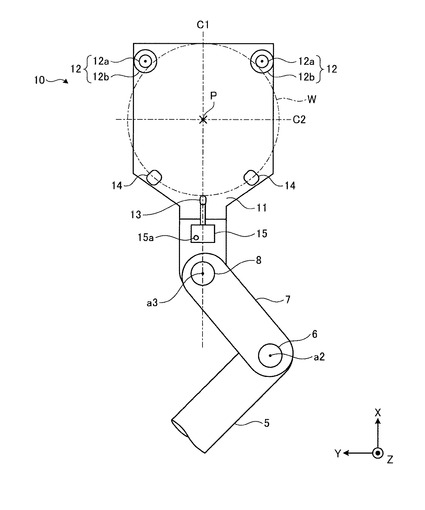
次に、実施形態に係るハンド10の構成例について、図2を用いて説明する。図2は、実施形態に係るハンド10の構成例を示す図である。なお、図2には、ハンド10をZ軸の正方向からみた場合の平面図を示している。また、ここでは、図1において既に示したアーム5、関節部6、アーム7、関節部8、回転軸a2および回転軸a3についての説明は省略することとする。
【0022】
図2に示すように、ハンド10は、プレート11と、固定爪12と、可動爪13と、受け座14と、駆動部15とを備える。また、固定爪12は、基板Wの周縁部に沿って回転可能なローラ12aと、受け座12bとを備える。なお、ローラ12aおよび受け座12bは一体に連接されており、受け座12bは、ローラ12aとともに回転する。
【0023】
プレート11は、基板Wが載置される基底部もしくは基部ともいえる部材である。なお、図2には、シャベル状に成形されたプレート11を例示しているが、かかるプレート11の形状を限定するものではない。
【0024】
固定爪12は、プレート11に設けられ、設けられた位置から変位しない固定式の把持爪であり、たとえば、プレート11の先端部近傍に配置される。なお、図2には、1対の固定爪12が、プレート11の先端部両端に配置されている例を示している。
【0025】
かかる固定爪12は、ローラ12aにおいて基板Wの周縁部と当接し、受け座12bにおいて基板Wを下方から(すなわち、Z軸の正方向向きに)支持する。なお、かかる固定爪12の詳細については、図4Aおよび図4Bを用いて後述する。
【0026】
可動爪13は、可動式の把持爪であり、図中のX軸に沿ってスライド可能に設けられる。かかる可動爪13の動作の詳細については、図3を用いて後述する。
【0027】
受け座14は、前述の受け座12bと同様に、基板Wを下方から支持する部材である。なお、図2には、1対の受け座14が、プレート11の末端部近傍両端に配置されている例を示している。
【0028】
駆動部15は、可動爪13をスライド動作させる駆動機構であり、たとえば、エアシリンダなどを用いて構成される。
【0029】
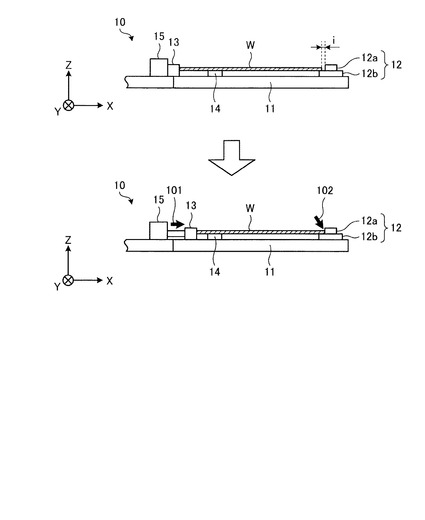
ここで、可動爪13の動作について、図3を用いて説明しておく。図3は、可動爪13の動作を示す図である。なお、図3には、Y軸の負方向からみた場合を簡略的に示しており、図3の上段には、基板Wの載置後および把持前の様子を、図3の下段には、基板Wの把持後の様子を、それぞれ示している。
【0030】
図3の上段に示すように、基板Wの把持前においては、基板Wは、受け座12bおよび受け座14によって下方からのみ支持される。このとき、基板Wと把持爪、たとえば、固定爪12のローラ12aとの間には、クリアランスiが存在する。なお、基板Wと可動爪13との間にもクリアランスが存在する場合があるが、かかる場合については図示を省略している。
【0031】
また、受け座12bおよび受け座14は所定の高さを有しており、基板Wの下面とプレート11の上面との間にかかる高さに基づく所定のクリアランスをおいて基板Wを支持する。これにより、基板Wへのパーティクルの付着などを防止することができる。
【0032】
そして、図3の下段に示すように、基板Wを把持する場合、ロボット1は、駆動部15に対して可動爪13をプレート11の先端部へ向けて(すなわち、図中のX軸の正方向へ向けて)スライドさせる(図中の矢印101参照)。
【0033】
そして、スライドされた可動爪13は、基板Wを固定爪12へ当接させる向きに押圧し、クリアランスiを埋めて基板Wの周縁部を固定爪12のローラ12aへ当接させる(図中の矢印102参照)。
【0034】
この結果、基板Wは、その周縁部を固定爪12と可動爪13とで挟みつけられ、把持されることとなる。
【0035】
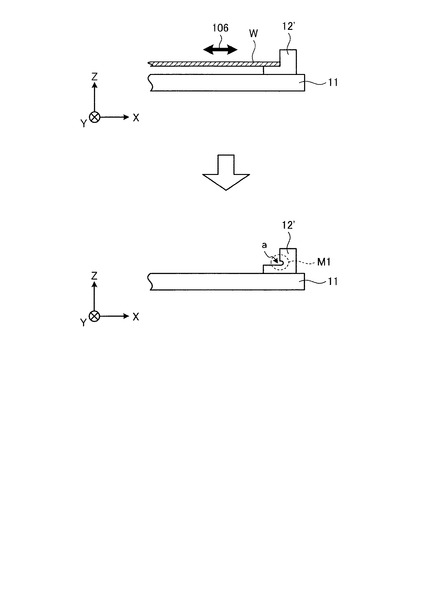
ここで、従来の固定爪12’の構成例について、図7を用いて触れておく。図7は、従来の固定爪12’の構成例を示す図である。図7に示すように、従来の固定爪12’は、たとえば、基板Wが押し付けられる側壁部と、基板Wを下方から支持する受け座とで、固定的に一体成形されていた。
【0036】
このため、側壁部へ基板Wが繰り返し押し付けられた場合(図中の両矢印106参照)、側壁部の特定の部位に対して繰り返し応力がかかり、摩耗aが生じやすかった(図中の閉曲線M1に囲まれた部分参照)。
【0037】
そして、かかる摩耗aが生じた場合、プレート11上における基板Wの位置決めにずれが生じるため、固定爪12’をそのたびに交換する必要があった。すなわちメンテナンスに手間がかかっていた。
【0038】
図3の説明に戻る。そこで、本実施形態に係るハンド10では、基板Wの周縁部を、かかる周縁部に沿って回転可能なローラ12aへ当接させることとした。これにより、特定の部位に対して繰り返し応力がかかるのを抑えることができるので、固定爪12の摩耗を抑えてメンテナンスの手間を軽減することができる。
【0039】
また、図3の上段に示した、基板Wが下方からのみ支持されている状態においては、X軸方向に沿ったクリアランスだけでなく、XY平面に沿ったずれが生じる場合が多い。
【0040】
この点につき、本実施形態に係るハンド10は、基板Wの当接を受けたローラ12aを基板Wの周縁部に沿って受動的に回転させることで、かかるXY平面に沿ったずれを修正し、基板Wを所定位置へ案内する。かかる点の詳細については、図5Aおよび図5Bを用いて後述する。
【0041】
図2の説明に戻り、基板Wの所定位置について述べておく。図2は、基板Wが、1対の固定爪12および可動爪13によって把持され、3点支持されている様子をあらわしている。
【0042】
ここで、基板Wの所定位置とは、かかる状態における基板Wの位置であるものとする。また、以下では、かかる所定位置にある基板Wの中心を中心Pと、かかる中心Pを通るX軸に平行な軸線を軸C1と、同様に中心Pを通るY軸に平行な軸線を軸C2と、それぞれあらわすこととする。
【0043】
また、可動爪13の稼働回数をカウントし、かかる稼働回数に応じて固定爪12の交換時期をユーザに対して通知する通知部を設けることとしてもよい。たとえば、図2には、駆動部15が、可動爪13の稼働回数に応じて点灯する通知ランプ15aを備えている例を示している。ユーザは、かかる通知ランプ15aの点灯を、固定爪12の交換時期を知るひとつの目安とすることができる。なお、通知ランプ15aは、駆動部15以外の箇所に配置されてもよいし、通知手段もランプに限られるものではない。
【0044】
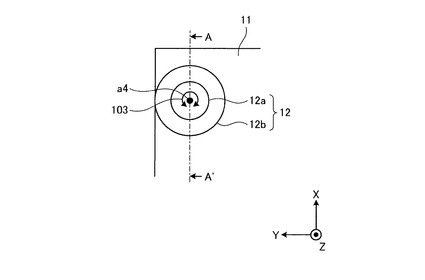
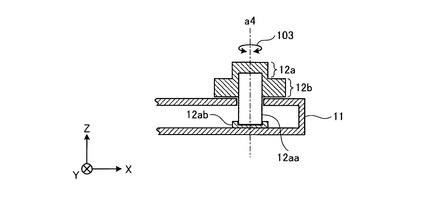
次に、固定爪12の構成例について、図4Aおよび図4Bを用いて説明する。図4Aおよび図4Bは、固定爪12の構成例を示す図である。なお、図4Aには、固定爪12をZ軸の正方向からみた平面図を、図4Bには、図4Aに示すA−A’断面をY軸の負方向からみた断面図を、それぞれ示している。
【0045】
また、図4Aおよび図4Bには、図2において示した1対の固定爪12のうち、軸C1で区切られた左方の固定爪12を示しているが、右方の固定爪12についても同様の構成であるものとする。
【0046】
図2を用いた説明と一部重複するが、図4Aおよび図4Bに示すように、固定爪12は、ローラ12aと、受け座12bとを備える。なお、ローラ12aおよび受け座12bは一体に連接されている。ローラ12aは、基板Wの周縁部の当接を受けて、基板Wの周縁部に沿って受動的に回転する。
【0047】
受け座12bは、ローラ12aと一体となって回転する台座ともいえる部材である。すなわち、ローラ12aと受け座12bとで、基板Wの周縁部に沿って回転可能な回転体を構成する。なお、受け座12bは、ローラ12aの直径を上回る最大幅を有する。そして、かかるローラ12aの直径を上回る部位において基板Wを載置して、基板Wを下方から支持する。
【0048】
そして、ローラ12aおよび受け座12bは、プレート11の上で、回転軸a4まわりに回転自在に回転するように設けられる(図中の両矢印103参照)。すなわち、固定爪12は、上述のように変位しない固定式であり、かつ、プレート11に対して回転可能に支持された回転式の把持爪である。かかる固定爪12の設置の構造としては、たとえば、図4Bに示すように、プレート11に対して貫設される支持ピン12aaを、プレート11内部に固着された軸受12abと、一体のローラ12aおよび受け座12bとによって軸支してもよい。
【0049】
なお、かかる設置構造である場合、ローラ12aおよび受け座12bが滑らかに回転自在であるように、ローラ12aおよび受け座12bとプレート11との間、あるいは、プレート11と支持ピン12aaとの間に、所定のクリアランスが設けられることが好ましい。
【0050】
また、図4Aおよび図4Bに示すように、ローラ12aおよび受け座12bは、それぞれその形状から、ローラ12aについては円筒状に形成された「円筒部」と、受け座12bについては円筒部から鍔(つば)状に張り出して形成された「鍔部」と、言い換えることができる。すなわち、「円筒部」は、その外周面において基板Wの周縁部端面と接し、「鍔部」は、その上面において基板Wの周縁部下面と接する。
【0051】
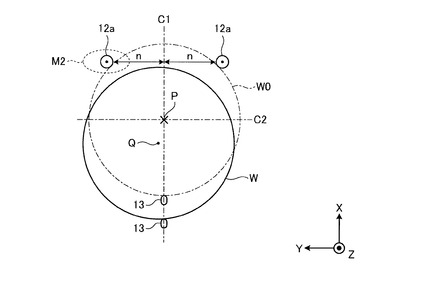
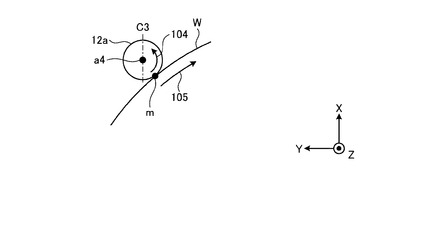
次に、基板Wが当接された場合のローラ12aの動作について、図5Aおよび図5Bを用いて説明する。図5Aおよび図5Bは、ローラ12aの動作を示す図である。なお、図5Aおよび図5Bにおいては、説明に必要な部材のみを簡略的に示すこととし、ローラ12aとともに回転する受け座12bについては図示を省略している。また、図5Bには、図5Aに示すM2部を拡大的に示している。
【0052】
まず、図5Aに示すように、1対のローラ12aは、軸C1を挟んで間隔nをおいて対称位置に配置されているものとする。このように、1対のローラ12aは、可動爪13が基板Wを押圧する軌道について対称位置に配置されることが好ましい。
【0053】
ここで、図5Aの実線の基板Wに示されるように、把持前の基板Wは、所定位置にある仮想的な基板W0に対し、XY平面に沿ってずれたまま載置されることが多い。たとえば、図5Aに示すように、基板Wの中心Qが、所定位置の中心Pに対して、軸C1を挟んで左方に、かつ、軸C2を挟んで下方にずれているものとする。
【0054】
かかる状態において、可動爪13がX軸方向に沿って基板Wを押圧したものとする。かかる場合、基板Wは、1対のローラ12aへ同時に当接されるのではなく、まず、閉曲線M2に囲まれた左方のローラ12aへ偏って当接される。
【0055】
ここで、図5Bに示すように、接点mにおいて基板Wがローラ12aに当接したものとする。かかる場合、ローラ12aの回転中心を通り、かつ、可動爪13の押圧方向に平行な軸C3を挟んで右方に位置する接点mで当接された基板Wは、その押圧力と当接面の摩擦力とによって、ローラ12aを受動的に反時計回りに回転させる(矢印104参照)。なお、図示していないが、かかる回転には、受け座12b(図4Aおよび図4B参照)とかかる受け座12bがその上面において接している基板Wの周縁部下面との摩擦力があわせてはたらいている。
【0056】
また、基板Wは、かかるローラ12aの回転に応じて、押圧方向から矢印105方向へ向きを変えて回転しつつ移動する。そして、基板Wは、軸C1を挟んで対称位置に位置する右方のローラ12aに当接されることによってその動きを止め、基板W0の示す所定位置に収まる。すなわち、基板Wは、XY平面に沿って生じたずれを修正しつつ所定位置へ案内され、1対の固定爪12および可動爪13によって把持されることとなる。
【0057】
そして、基板Wが案内される間、ローラ12aは回転しながら基板Wと当接することとなるので、ローラ12aの外周面は、当接によってかかる応力を特定部位だけで受けることがない。すなわち、ローラ12aの摩耗を抑えることができるので、交換作業などにかかるメンテナンスの手間を軽減することができる。
【0058】
また、図示していないが、受け座12b(図4Aおよび図4B参照)は、基板Wを下方から支持しつつローラ12aとともに回転することで、基板Wを、その下面へ傷を生じさせることなく滑らかに移動させる。
【0059】
なお、上述したように、ローラ12aおよび受け座12b(図4Aおよび図4B参照)は、受動的に回転するにあたって基板Wとの当接面に摩擦力を生じる必要があるので、ローラ12aおよび受け座12bの外周面を構成する素材は、基板Wの周縁部と接して所定の摩擦力を生じるものであることが好ましい。
【0060】
また、図5Aおよび図5Bには、軸C1を挟んで左方に位置するローラ12aを例示して説明を行ったが、右方に位置するローラ12aについても、左右の差異はあれ同様の動作を示すことは言うまでもない。
【0061】
ところで、これまでは、基板Wの当接を受けて受動的に回転するローラ12aが、固定爪12に備えられている例を示したが、基板Wを押圧する側の把持部材に対して設けることとしてもよい。
【0062】
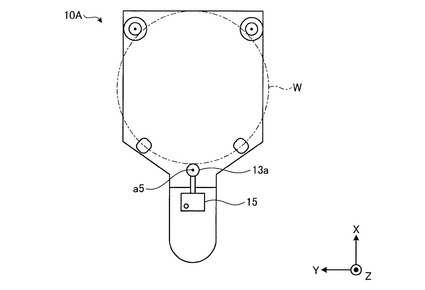
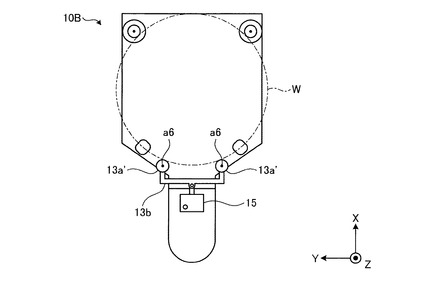
そこで、かかる変形例について、図6Aおよび図6Bを用いて説明する。図6Aは、変形例に係るハンド10Aの構成例を示す図であり、図6Bは、変形例に係るハンド10Bの構成例を示す図である。
【0063】
なお、図6Aおよび図6Bにおいては、実施形態に係るハンド10と同一の構成要素については説明に必要な構成要素にのみ符号を付している。
【0064】
図6Aに示すように、変形例に係るハンド10Aは、駆動部15によってスライドされ、基板Wを押圧する把持部材としてローラ13aを備える。ローラ13aは、回転軸a5まわりに回転自在に設けられる。
【0065】
かかるローラ13aもまた、基板WがXY平面に沿ったずれを生じて載置されている場合には、図5Aおよび図5Bに示した場合と同様の理由で基板Wとの当接時に回転することとなる。すなわち、外周面の特定部位だけに応力がかかりにくいので、摩耗を抑えて、メンテナンスの手間を軽減することができる。
【0066】
また、図6Bに示す、ハンド10Bの回転軸a6まわりに回転自在に回転するローラ13a’のように、押圧する側の把持部材を複数個設け、連結部材13bで連結して平行にスライドさせてもよい。かかる場合には、ローラ13a’の摩耗を防ぐだけでなく、基板Wのずれが大きい場合にも確実に対応することができる。
【0067】
上述してきたように、実施形態に係るハンドは、基部であるプレートと、かかるプレートに配置され、基板の周縁部にそれぞれ接してかかる基板を把持する複数個の把持爪とを備えるハンドであって、把持爪の少なくとも一つは、基板の周縁部の当接を受けながら回転する。
【0068】
したがって、実施形態に係るハンドによれば、部材の摩耗を抑えてメンテナンスの手間を軽減することができる。
【0069】
ところで、上述した実施形態では、1対の固定爪を備える場合に、双方ともにローラを備える場合について説明したが、これに限られるものではない。たとえば、一方の固定爪についてのみローラを備えることとしてもよい。
【0070】
かかる場合、プレートに載置された基板のずれが常に一定方向に偏って生じる場合や、基板の周縁部の形状が一部のみR形状などである場合に、かかる部位に当接する固定爪についてのみローラを備えることで、少なくともかかる部位の摩耗を抑えることができる。したがって、基板の形状は円形に限らなくともよい。
【0071】
また、このように特定の固定爪についてのみローラを備える点は、可動爪について同様に適用することとしてもよい。
【0072】
また、上述した実施形態では、回転体がローラである場合について主に説明したが、これに限られるものではない。たとえば、基板と当接する部位が球状の回転体である把持部材を用いることとしてもよい。
【0073】
また、上述した実施形態では、把持部材が、プレートの先端部近傍や末端部近傍に配置される場合について説明したが、かかる把持部材の配置位置を限定するものではない。
【0074】
また、上述した実施形態では、基板が、主に半導体ウェハである場合を例に挙げて説明したが、基板の種別を問わず適用できることは言うまでもない。
【0075】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0076】
1 ロボット
2 基台
3、5、7 アーム
4、6、8 関節部
10、10A、10B ハンド
11 プレート
12、12’ 固定爪
12a ローラ
12aa 支持ピン
12ab 軸受
12b 受け座
13 可動爪
13a、13a’ ローラ
13b 連結部材
14 受け座
15 駆動部
15a 通知ランプ
20 制御装置
【技術分野】
【0001】
開示の実施形態は、ハンドおよびロボットに関する。
【背景技術】
【0002】
従来、半導体ウェハなどの円板状の基板を搬送する基板搬送用のロボットが知られている。かかるロボットは、把持爪のような把持部材を複数個備えるハンドを有しており、把持部材でハンド上に載置された基板の周縁部を挟みつけることによって、所定位置で基板を把持する。
【0003】
たとえば、特許文献1には、移動可能な把持部材である移動ガイドおよび固定された把持部材である固定ガイドを有するハンドを備え、基板を移動ガイドで固定ガイドの壁面へ押し付けることによって把持動作を行う基板搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−279068号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のハンドは、前述の押し付けなどを繰り返すことによって、把持部材を磨耗させやすいという問題があった。このため、把持部材の交換頻度が高く、メンテナンスに手間がかかっていた。
【0006】
実施形態の一態様は、上記に鑑みてなされたものであって、部材の摩耗を抑えてメンテナンスの手間を軽減することができるハンドおよびロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
実施形態の一態様に係るハンドは、基部と、前記基部に配置され、基板の周縁部にそれぞれ接して当該基板を把持する複数個の支持部とを備えたハンドであって、前記支持部の少なくとも一つは、前記基板の周縁部の当接を受けながら回転する。
【発明の効果】
【0008】
実施形態の一態様によれば、部材の摩耗を抑えてメンテナンスの手間を軽減することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、実施形態に係るロボットの構成例を示す図である。
【図2】図2は、実施形態に係るハンドの構成例を示す図である。
【図3】図3は、可動爪の動作を示す図である。
【図4A】図4Aは、固定爪の構成例を示す図である。
【図4B】図4Bは、固定爪の構成例を示す図である。
【図5A】図5Aは、ローラの動作を示す図である。
【図5B】図5Bは、ローラの動作を示す図である。
【図6A】図6Aは、変形例に係るハンドの構成例を示す図である。
【図6B】図6Bは、変形例に係るハンドの構成例を示す図である。
【図7】図7は、従来の固定爪の構成例を示す図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本願の開示するハンドおよびロボットの実施形態を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
【0011】
また、以下では、主に、基板が半導体ウェハである場合について説明する。
【0012】
また、以下では、基板の周縁部を挟みつけて把持する把持部材を、主に「把持爪」と記載することとする。なお、「把持爪」の「把持」には、基板の周縁部を挟みつけるだけでなく、基板を所定位置において支持する意味を含むものとする。したがって、「把持爪」を「支持部」と言い換えてもよい。
【0013】
図1は、実施形態に係るロボット1の構成例を示す図である。なお、図1には、説明を分かりやすくするために、鉛直上向きを正方向とするZ軸を含む3次元の直交座標系を図示している。かかる直交座標系は、以下の説明に用いる他の図面においても示す場合がある。
【0014】
図1に示すように、ロボット1は、多関節ロボットであり、基台2と、アーム3、アーム5およびアーム7と、関節部4、関節部6および関節部8と、ハンド10とを備える。
【0015】
また、ロボット1には、制御装置20が接続されており、かかる制御装置20によってロボット1が行う基板の把持動作および搬送動作などが制御される。なお、かかる制御は、制御装置20にあらかじめ格納された教示データに基づいて行われる。
【0016】
アーム3は、基台2から鉛直方向(Z軸方向)にスライド可能に設けられる(図中の両矢印a0参照)。これにより、ハンド10は、鉛直方向へ昇降することができる。
【0017】
アーム5は、アーム3と関節部4を介して連結される。このとき、アーム5は、関節部4の回転軸a1まわりに回転自在に支持される(回転軸a1まわりの両矢印参照)。同様に、アーム7は、アーム5と関節部6を介して連結される。このとき、アーム7は、関節部6の回転軸a2まわりに回転自在に支持される(回転軸a2まわりの両矢印参照)。
【0018】
ハンド10は、載置された半導体ウェハなどの基板を把持するエンドエフェクタであり、アーム7の終端部に関節部8を介して連結される。このとき、ハンド10は、関節部8の回転軸a3まわりに回転自在に支持される(回転軸a3まわりの両矢印参照)。
【0019】
ここで、関節部4、関節部6および関節部8にはそれぞれ、アクチュエータやモータといった図示しない駆動機構が内蔵されており、かかる駆動機構の駆動によって、アーム5、アーム7およびハンド10はそれぞれ、図中のXY平面に沿った旋回動作を行う。
【0020】
なお、図1には、ハンド10を1つ備えるロボット1を例示したが、ハンド10の個数を限定するものではない。たとえば、複数個のハンド10を、アナログ時計の長針および短針のように、回転軸a3について重ねて設けることとしてもよい。
【0021】
次に、実施形態に係るハンド10の構成例について、図2を用いて説明する。図2は、実施形態に係るハンド10の構成例を示す図である。なお、図2には、ハンド10をZ軸の正方向からみた場合の平面図を示している。また、ここでは、図1において既に示したアーム5、関節部6、アーム7、関節部8、回転軸a2および回転軸a3についての説明は省略することとする。
【0022】
図2に示すように、ハンド10は、プレート11と、固定爪12と、可動爪13と、受け座14と、駆動部15とを備える。また、固定爪12は、基板Wの周縁部に沿って回転可能なローラ12aと、受け座12bとを備える。なお、ローラ12aおよび受け座12bは一体に連接されており、受け座12bは、ローラ12aとともに回転する。
【0023】
プレート11は、基板Wが載置される基底部もしくは基部ともいえる部材である。なお、図2には、シャベル状に成形されたプレート11を例示しているが、かかるプレート11の形状を限定するものではない。
【0024】
固定爪12は、プレート11に設けられ、設けられた位置から変位しない固定式の把持爪であり、たとえば、プレート11の先端部近傍に配置される。なお、図2には、1対の固定爪12が、プレート11の先端部両端に配置されている例を示している。
【0025】
かかる固定爪12は、ローラ12aにおいて基板Wの周縁部と当接し、受け座12bにおいて基板Wを下方から(すなわち、Z軸の正方向向きに)支持する。なお、かかる固定爪12の詳細については、図4Aおよび図4Bを用いて後述する。
【0026】
可動爪13は、可動式の把持爪であり、図中のX軸に沿ってスライド可能に設けられる。かかる可動爪13の動作の詳細については、図3を用いて後述する。
【0027】
受け座14は、前述の受け座12bと同様に、基板Wを下方から支持する部材である。なお、図2には、1対の受け座14が、プレート11の末端部近傍両端に配置されている例を示している。
【0028】
駆動部15は、可動爪13をスライド動作させる駆動機構であり、たとえば、エアシリンダなどを用いて構成される。
【0029】
ここで、可動爪13の動作について、図3を用いて説明しておく。図3は、可動爪13の動作を示す図である。なお、図3には、Y軸の負方向からみた場合を簡略的に示しており、図3の上段には、基板Wの載置後および把持前の様子を、図3の下段には、基板Wの把持後の様子を、それぞれ示している。
【0030】
図3の上段に示すように、基板Wの把持前においては、基板Wは、受け座12bおよび受け座14によって下方からのみ支持される。このとき、基板Wと把持爪、たとえば、固定爪12のローラ12aとの間には、クリアランスiが存在する。なお、基板Wと可動爪13との間にもクリアランスが存在する場合があるが、かかる場合については図示を省略している。
【0031】
また、受け座12bおよび受け座14は所定の高さを有しており、基板Wの下面とプレート11の上面との間にかかる高さに基づく所定のクリアランスをおいて基板Wを支持する。これにより、基板Wへのパーティクルの付着などを防止することができる。
【0032】
そして、図3の下段に示すように、基板Wを把持する場合、ロボット1は、駆動部15に対して可動爪13をプレート11の先端部へ向けて(すなわち、図中のX軸の正方向へ向けて)スライドさせる(図中の矢印101参照)。
【0033】
そして、スライドされた可動爪13は、基板Wを固定爪12へ当接させる向きに押圧し、クリアランスiを埋めて基板Wの周縁部を固定爪12のローラ12aへ当接させる(図中の矢印102参照)。
【0034】
この結果、基板Wは、その周縁部を固定爪12と可動爪13とで挟みつけられ、把持されることとなる。
【0035】
ここで、従来の固定爪12’の構成例について、図7を用いて触れておく。図7は、従来の固定爪12’の構成例を示す図である。図7に示すように、従来の固定爪12’は、たとえば、基板Wが押し付けられる側壁部と、基板Wを下方から支持する受け座とで、固定的に一体成形されていた。
【0036】
このため、側壁部へ基板Wが繰り返し押し付けられた場合(図中の両矢印106参照)、側壁部の特定の部位に対して繰り返し応力がかかり、摩耗aが生じやすかった(図中の閉曲線M1に囲まれた部分参照)。
【0037】
そして、かかる摩耗aが生じた場合、プレート11上における基板Wの位置決めにずれが生じるため、固定爪12’をそのたびに交換する必要があった。すなわちメンテナンスに手間がかかっていた。
【0038】
図3の説明に戻る。そこで、本実施形態に係るハンド10では、基板Wの周縁部を、かかる周縁部に沿って回転可能なローラ12aへ当接させることとした。これにより、特定の部位に対して繰り返し応力がかかるのを抑えることができるので、固定爪12の摩耗を抑えてメンテナンスの手間を軽減することができる。
【0039】
また、図3の上段に示した、基板Wが下方からのみ支持されている状態においては、X軸方向に沿ったクリアランスだけでなく、XY平面に沿ったずれが生じる場合が多い。
【0040】
この点につき、本実施形態に係るハンド10は、基板Wの当接を受けたローラ12aを基板Wの周縁部に沿って受動的に回転させることで、かかるXY平面に沿ったずれを修正し、基板Wを所定位置へ案内する。かかる点の詳細については、図5Aおよび図5Bを用いて後述する。
【0041】
図2の説明に戻り、基板Wの所定位置について述べておく。図2は、基板Wが、1対の固定爪12および可動爪13によって把持され、3点支持されている様子をあらわしている。
【0042】
ここで、基板Wの所定位置とは、かかる状態における基板Wの位置であるものとする。また、以下では、かかる所定位置にある基板Wの中心を中心Pと、かかる中心Pを通るX軸に平行な軸線を軸C1と、同様に中心Pを通るY軸に平行な軸線を軸C2と、それぞれあらわすこととする。
【0043】
また、可動爪13の稼働回数をカウントし、かかる稼働回数に応じて固定爪12の交換時期をユーザに対して通知する通知部を設けることとしてもよい。たとえば、図2には、駆動部15が、可動爪13の稼働回数に応じて点灯する通知ランプ15aを備えている例を示している。ユーザは、かかる通知ランプ15aの点灯を、固定爪12の交換時期を知るひとつの目安とすることができる。なお、通知ランプ15aは、駆動部15以外の箇所に配置されてもよいし、通知手段もランプに限られるものではない。
【0044】
次に、固定爪12の構成例について、図4Aおよび図4Bを用いて説明する。図4Aおよび図4Bは、固定爪12の構成例を示す図である。なお、図4Aには、固定爪12をZ軸の正方向からみた平面図を、図4Bには、図4Aに示すA−A’断面をY軸の負方向からみた断面図を、それぞれ示している。
【0045】
また、図4Aおよび図4Bには、図2において示した1対の固定爪12のうち、軸C1で区切られた左方の固定爪12を示しているが、右方の固定爪12についても同様の構成であるものとする。
【0046】
図2を用いた説明と一部重複するが、図4Aおよび図4Bに示すように、固定爪12は、ローラ12aと、受け座12bとを備える。なお、ローラ12aおよび受け座12bは一体に連接されている。ローラ12aは、基板Wの周縁部の当接を受けて、基板Wの周縁部に沿って受動的に回転する。
【0047】
受け座12bは、ローラ12aと一体となって回転する台座ともいえる部材である。すなわち、ローラ12aと受け座12bとで、基板Wの周縁部に沿って回転可能な回転体を構成する。なお、受け座12bは、ローラ12aの直径を上回る最大幅を有する。そして、かかるローラ12aの直径を上回る部位において基板Wを載置して、基板Wを下方から支持する。
【0048】
そして、ローラ12aおよび受け座12bは、プレート11の上で、回転軸a4まわりに回転自在に回転するように設けられる(図中の両矢印103参照)。すなわち、固定爪12は、上述のように変位しない固定式であり、かつ、プレート11に対して回転可能に支持された回転式の把持爪である。かかる固定爪12の設置の構造としては、たとえば、図4Bに示すように、プレート11に対して貫設される支持ピン12aaを、プレート11内部に固着された軸受12abと、一体のローラ12aおよび受け座12bとによって軸支してもよい。
【0049】
なお、かかる設置構造である場合、ローラ12aおよび受け座12bが滑らかに回転自在であるように、ローラ12aおよび受け座12bとプレート11との間、あるいは、プレート11と支持ピン12aaとの間に、所定のクリアランスが設けられることが好ましい。
【0050】
また、図4Aおよび図4Bに示すように、ローラ12aおよび受け座12bは、それぞれその形状から、ローラ12aについては円筒状に形成された「円筒部」と、受け座12bについては円筒部から鍔(つば)状に張り出して形成された「鍔部」と、言い換えることができる。すなわち、「円筒部」は、その外周面において基板Wの周縁部端面と接し、「鍔部」は、その上面において基板Wの周縁部下面と接する。
【0051】
次に、基板Wが当接された場合のローラ12aの動作について、図5Aおよび図5Bを用いて説明する。図5Aおよび図5Bは、ローラ12aの動作を示す図である。なお、図5Aおよび図5Bにおいては、説明に必要な部材のみを簡略的に示すこととし、ローラ12aとともに回転する受け座12bについては図示を省略している。また、図5Bには、図5Aに示すM2部を拡大的に示している。
【0052】
まず、図5Aに示すように、1対のローラ12aは、軸C1を挟んで間隔nをおいて対称位置に配置されているものとする。このように、1対のローラ12aは、可動爪13が基板Wを押圧する軌道について対称位置に配置されることが好ましい。
【0053】
ここで、図5Aの実線の基板Wに示されるように、把持前の基板Wは、所定位置にある仮想的な基板W0に対し、XY平面に沿ってずれたまま載置されることが多い。たとえば、図5Aに示すように、基板Wの中心Qが、所定位置の中心Pに対して、軸C1を挟んで左方に、かつ、軸C2を挟んで下方にずれているものとする。
【0054】
かかる状態において、可動爪13がX軸方向に沿って基板Wを押圧したものとする。かかる場合、基板Wは、1対のローラ12aへ同時に当接されるのではなく、まず、閉曲線M2に囲まれた左方のローラ12aへ偏って当接される。
【0055】
ここで、図5Bに示すように、接点mにおいて基板Wがローラ12aに当接したものとする。かかる場合、ローラ12aの回転中心を通り、かつ、可動爪13の押圧方向に平行な軸C3を挟んで右方に位置する接点mで当接された基板Wは、その押圧力と当接面の摩擦力とによって、ローラ12aを受動的に反時計回りに回転させる(矢印104参照)。なお、図示していないが、かかる回転には、受け座12b(図4Aおよび図4B参照)とかかる受け座12bがその上面において接している基板Wの周縁部下面との摩擦力があわせてはたらいている。
【0056】
また、基板Wは、かかるローラ12aの回転に応じて、押圧方向から矢印105方向へ向きを変えて回転しつつ移動する。そして、基板Wは、軸C1を挟んで対称位置に位置する右方のローラ12aに当接されることによってその動きを止め、基板W0の示す所定位置に収まる。すなわち、基板Wは、XY平面に沿って生じたずれを修正しつつ所定位置へ案内され、1対の固定爪12および可動爪13によって把持されることとなる。
【0057】
そして、基板Wが案内される間、ローラ12aは回転しながら基板Wと当接することとなるので、ローラ12aの外周面は、当接によってかかる応力を特定部位だけで受けることがない。すなわち、ローラ12aの摩耗を抑えることができるので、交換作業などにかかるメンテナンスの手間を軽減することができる。
【0058】
また、図示していないが、受け座12b(図4Aおよび図4B参照)は、基板Wを下方から支持しつつローラ12aとともに回転することで、基板Wを、その下面へ傷を生じさせることなく滑らかに移動させる。
【0059】
なお、上述したように、ローラ12aおよび受け座12b(図4Aおよび図4B参照)は、受動的に回転するにあたって基板Wとの当接面に摩擦力を生じる必要があるので、ローラ12aおよび受け座12bの外周面を構成する素材は、基板Wの周縁部と接して所定の摩擦力を生じるものであることが好ましい。
【0060】
また、図5Aおよび図5Bには、軸C1を挟んで左方に位置するローラ12aを例示して説明を行ったが、右方に位置するローラ12aについても、左右の差異はあれ同様の動作を示すことは言うまでもない。
【0061】
ところで、これまでは、基板Wの当接を受けて受動的に回転するローラ12aが、固定爪12に備えられている例を示したが、基板Wを押圧する側の把持部材に対して設けることとしてもよい。
【0062】
そこで、かかる変形例について、図6Aおよび図6Bを用いて説明する。図6Aは、変形例に係るハンド10Aの構成例を示す図であり、図6Bは、変形例に係るハンド10Bの構成例を示す図である。
【0063】
なお、図6Aおよび図6Bにおいては、実施形態に係るハンド10と同一の構成要素については説明に必要な構成要素にのみ符号を付している。
【0064】
図6Aに示すように、変形例に係るハンド10Aは、駆動部15によってスライドされ、基板Wを押圧する把持部材としてローラ13aを備える。ローラ13aは、回転軸a5まわりに回転自在に設けられる。
【0065】
かかるローラ13aもまた、基板WがXY平面に沿ったずれを生じて載置されている場合には、図5Aおよび図5Bに示した場合と同様の理由で基板Wとの当接時に回転することとなる。すなわち、外周面の特定部位だけに応力がかかりにくいので、摩耗を抑えて、メンテナンスの手間を軽減することができる。
【0066】
また、図6Bに示す、ハンド10Bの回転軸a6まわりに回転自在に回転するローラ13a’のように、押圧する側の把持部材を複数個設け、連結部材13bで連結して平行にスライドさせてもよい。かかる場合には、ローラ13a’の摩耗を防ぐだけでなく、基板Wのずれが大きい場合にも確実に対応することができる。
【0067】
上述してきたように、実施形態に係るハンドは、基部であるプレートと、かかるプレートに配置され、基板の周縁部にそれぞれ接してかかる基板を把持する複数個の把持爪とを備えるハンドであって、把持爪の少なくとも一つは、基板の周縁部の当接を受けながら回転する。
【0068】
したがって、実施形態に係るハンドによれば、部材の摩耗を抑えてメンテナンスの手間を軽減することができる。
【0069】
ところで、上述した実施形態では、1対の固定爪を備える場合に、双方ともにローラを備える場合について説明したが、これに限られるものではない。たとえば、一方の固定爪についてのみローラを備えることとしてもよい。
【0070】
かかる場合、プレートに載置された基板のずれが常に一定方向に偏って生じる場合や、基板の周縁部の形状が一部のみR形状などである場合に、かかる部位に当接する固定爪についてのみローラを備えることで、少なくともかかる部位の摩耗を抑えることができる。したがって、基板の形状は円形に限らなくともよい。
【0071】
また、このように特定の固定爪についてのみローラを備える点は、可動爪について同様に適用することとしてもよい。
【0072】
また、上述した実施形態では、回転体がローラである場合について主に説明したが、これに限られるものではない。たとえば、基板と当接する部位が球状の回転体である把持部材を用いることとしてもよい。
【0073】
また、上述した実施形態では、把持部材が、プレートの先端部近傍や末端部近傍に配置される場合について説明したが、かかる把持部材の配置位置を限定するものではない。
【0074】
また、上述した実施形態では、基板が、主に半導体ウェハである場合を例に挙げて説明したが、基板の種別を問わず適用できることは言うまでもない。
【0075】
さらなる効果や変形例は、当業者によって容易に導き出すことができる。このため、本発明のより広範な態様は、以上のように表しかつ記述した特定の詳細および代表的な実施形態に限定されるものではない。したがって、添付の特許請求の範囲およびその均等物によって定義される総括的な発明の概念の精神または範囲から逸脱することなく、様々な変更が可能である。
【符号の説明】
【0076】
1 ロボット
2 基台
3、5、7 アーム
4、6、8 関節部
10、10A、10B ハンド
11 プレート
12、12’ 固定爪
12a ローラ
12aa 支持ピン
12ab 軸受
12b 受け座
13 可動爪
13a、13a’ ローラ
13b 連結部材
14 受け座
15 駆動部
15a 通知ランプ
20 制御装置
【特許請求の範囲】
【請求項1】
基部と、前記基部に配置され、基板の周縁部にそれぞれ接して当該基板を把持する複数個の支持部とを備えたハンドにおいて、
前記支持部の少なくとも一つは、
前記基板の周縁部の当接を受けながら回転することを特徴とするハンド。
【請求項2】
前記支持部の少なくとも一つは、
前記基板を他の支持部へ当接させる向きに押圧する可動式の支持部であり、
前記他の支持部は、
前記基部に対して回転可能に支持され、前記可動式の支持部の押圧によって当接された前記基板の周縁部に沿って回転する回転式の支持部であることを特徴とする請求項1に記載のハンド。
【請求項3】
前記回転式の支持部は、
前記可動式の支持部が前記基板を押圧する軌道について対称位置に少なくとも1対配置されることを特徴とする請求項2に記載のハンド。
【請求項4】
前記回転式の支持部は、
円筒状に形成され、外周面において前記基板の周縁部端面と接する円筒部と、
前記円筒部から鍔状に張り出して形成され、上面において前記基板の周縁部下面と接する鍔部と
を有し、
前記基板の周縁部の当接を受けた際に、前記鍔部と前記基板の周縁部下面との摩擦力に基づいて回転することを特徴とする請求項2または3に記載のハンド。
【請求項5】
前記回転式の支持部は、
前記基部の先端部近傍に配置され、
前記可動式の支持部は、
前記基部の末端部近傍に配置されることを特徴とする請求項2、3または4に記載のハンド。
【請求項6】
前記可動式の支持部の稼動回数をカウントし、前記稼動回数に応じて前記回転式の支持部の交換時期をユーザに対して通知する通知部
をさらに備えることを特徴とする請求項2〜5のいずれか一つに記載のハンド。
【請求項7】
請求項1〜6のいずれか一つに記載のハンド
を備えることを特徴とするロボット。
【請求項1】
基部と、前記基部に配置され、基板の周縁部にそれぞれ接して当該基板を把持する複数個の支持部とを備えたハンドにおいて、
前記支持部の少なくとも一つは、
前記基板の周縁部の当接を受けながら回転することを特徴とするハンド。
【請求項2】
前記支持部の少なくとも一つは、
前記基板を他の支持部へ当接させる向きに押圧する可動式の支持部であり、
前記他の支持部は、
前記基部に対して回転可能に支持され、前記可動式の支持部の押圧によって当接された前記基板の周縁部に沿って回転する回転式の支持部であることを特徴とする請求項1に記載のハンド。
【請求項3】
前記回転式の支持部は、
前記可動式の支持部が前記基板を押圧する軌道について対称位置に少なくとも1対配置されることを特徴とする請求項2に記載のハンド。
【請求項4】
前記回転式の支持部は、
円筒状に形成され、外周面において前記基板の周縁部端面と接する円筒部と、
前記円筒部から鍔状に張り出して形成され、上面において前記基板の周縁部下面と接する鍔部と
を有し、
前記基板の周縁部の当接を受けた際に、前記鍔部と前記基板の周縁部下面との摩擦力に基づいて回転することを特徴とする請求項2または3に記載のハンド。
【請求項5】
前記回転式の支持部は、
前記基部の先端部近傍に配置され、
前記可動式の支持部は、
前記基部の末端部近傍に配置されることを特徴とする請求項2、3または4に記載のハンド。
【請求項6】
前記可動式の支持部の稼動回数をカウントし、前記稼動回数に応じて前記回転式の支持部の交換時期をユーザに対して通知する通知部
をさらに備えることを特徴とする請求項2〜5のいずれか一つに記載のハンド。
【請求項7】
請求項1〜6のいずれか一つに記載のハンド
を備えることを特徴とするロボット。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6A】
【図6B】
【図7】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6A】
【図6B】
【図7】
【公開番号】特開2013−71186(P2013−71186A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−209881(P2011−209881)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]