
ハンドヘルドプリンタ
【課題】続けて行われる読取作業と貼付作業とに際しての作業性を良好にする。
【解決手段】ハウジング102の一面であるラベル排出面102bの先端側には、ライナレスラベルLLを排出するラベル排出口114が設けられている。ラベル排出面102bの反対側に位置させて、ハウジング102には片手把持可能な把持部104が設けられている。ラベル押え部152は、ラベル排出面102bを被貼付物に押え付ける動作に応じて、ラベル排出口114から排出されるライナレスラベルLLを被貼付物に押え付け、ラベル切断部153は、ラベル押え部152による押え付けに応じて、ライナレスラベルLLに突き当たり切れ目を形成する。また、第1読取部171は、ラベル排出面102bにおけるラベル排出口114よりも後端側に位置する第1読取窓172の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る。
【解決手段】ハウジング102の一面であるラベル排出面102bの先端側には、ライナレスラベルLLを排出するラベル排出口114が設けられている。ラベル排出面102bの反対側に位置させて、ハウジング102には片手把持可能な把持部104が設けられている。ラベル押え部152は、ラベル排出面102bを被貼付物に押え付ける動作に応じて、ラベル排出口114から排出されるライナレスラベルLLを被貼付物に押え付け、ラベル切断部153は、ラベル押え部152による押え付けに応じて、ライナレスラベルLLに突き当たり切れ目を形成する。また、第1読取部171は、ラベル排出面102bにおけるラベル排出口114よりも後端側に位置する第1読取窓172の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、片手で使用するハンドヘルドプリンタに関する。
【背景技術】
【0002】
従来、宅配便の荷物の集配所では、小型のスキャナ付きのプリンタ(例えば特許文献1参照)が作業員によって使用されている。集配所の作業員は、まず、荷物に付されて配送先コードを記述するコードシンボルをスキャナに読み取らせる(以下、読取作業と呼ぶ)。プリンタは、スキャナが読み取った配送先コードをラベルに印字して発行する。このとき、ラベルがライナレスラベルであれば、プリンタにはカッタが設けられており、作業員はライナレスラベルをカッタに押し当てて切断して単体のラベルとする。また、ラベルが剥離台紙に貼付されたものであれば、ラベルは剥離台紙から剥離されて発行される。作業員は、プリンタが発行したラベルを、配送先コードの読み取りを行った荷物に対して貼り付ける(以下、貼付作業と呼ぶ)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平4−310767号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1が開示しているスキャナ付きプリンタを使用して作業員が読取作業を行う場合、作業員は、長尺のハウジング(筐体)を利き手で上から掴み、その手首を無理に折り曲げて、ハウジング(筐体)の先端に位置する読取窓(スキャナ部)をコードシンボルの前面に位置付けなければならない。そして、続く貼付作業では、ハウジング(筐体)を利き手とは別の手に持ち変えてから、利き手でラベルを取って手作業で荷物に貼り付けなければならない。そのため、作業者の身体への負担が大きい。また、両作業は、それぞれ全く異なる動作を作業者に要求するため、読取作業と貼付作業とは、断続的に行われてしまう。このように、特許文献1が開示しているスキャナ付きプリンタを使用して読取作業と貼付作業とを行う場合、作業性は非常に悪いものとなっている。
【0005】
本発明は、続けて行われる読取作業と貼付作業との作業性を良好にすることを目的とする。
【課題を解決するための手段】
【0006】
本発明のハンドヘルドプリンタは、ハウジングと、前記ハウジング内でライナレスラベルを搬送する搬送機構と、前記搬送機構が搬送するライナレスラベルに対して印字動作を行う印字部と、ライナレスラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられて前記搬送機構が搬送するライナレスラベルを排出するラベル排出口と、前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるライナレスラベルを被貼付物に押え付けるラベル押え部と、前記ラベル押え部による押え付けに応じて、前記ラベル排出口から排出されるライナレスラベルに突き当たり切れ目を形成するラベル切断部と、前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、を備える。
【0007】
別の面から見た本発明のハンドヘルドプリンタは、ハウジングと、前記ハウジング内でラベルが剥離台紙に貼付されたラベル用紙を搬送する搬送機構と、前記搬送機構が搬送するラベル用紙に対して印字動作を行う印字部と、ラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられてラベルが通過自在なラベル排出口と、前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、前記ラベル排出口に配置され、前記搬送機構が搬送するラベル用紙の剥離台紙からラベルを剥離させて前記ラベル排出口から排出させる剥離部と、前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるラベルを被貼付物に押え付けるラベル押え部と、前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、を備える。
【発明の効果】
【0008】
本発明によれば、ラベル排出面を被貼付物と対面させたまま読取作業と貼付作業とを一連の作業として行えることとなり、両作業の作業性を良好にすることができる。
【図面の簡単な説明】
【0009】
【図1】ハンドヘルドプリンタを示す外観斜視図である。
【図2】図1とは別の方向から見たハンドヘルドプリンタを示す外観斜視図である。
【図3】ライナレスラベルを示す斜視図である。
【図4】ハンドヘルドプリンタを一部を切り欠いて示す側面図である。
【図5】ラベル切断部を示す模式図である。
【図6】ハンドヘルドプリンタのハードウェア構成を示すブロック図である。
【図7】ハンドヘルドプリンタのCPUが実行する処理の流れを示すフローチャートである。
【図8】ハンドヘルドプリンタの変形例を一部を切り欠いて示す側面図である。
【図9】ハンドヘルドプリンタの使用状態を示す模式図である。
【図10】ハンドヘルドプリンタの使用状態の別の一例を示す模式図である。
【発明を実施するための形態】
【0010】
本発明の実施の形態について図1ないし図10に基づいて説明する。本実施の形態は、宅配便の集配所で使用されるハンドヘルドプリンタ101への適用例である。
【0011】
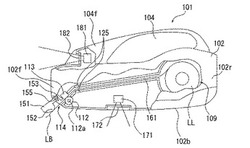
図1は、ハンドヘルドプリンタ101を示す外観斜視図である。ハンドヘルドプリンタ101は、一方向に長い直方体を変形させた形状のハウジング102を有する。ハウジング102は、その一面に、ハウジング102の長手方向に沿った把持部104を配置している。ハンドヘルドプリンタ101のユーザである作業員U(図9参照)は、片方の手(図1中に実線で示す)で把持部104を把持した状態で、ハンドヘルドプリンタ101を自在に移動させることができる。把持部104を把持する手を通る腕の延長側を、ハンドヘルドプリンタ101(ハウジング102)の先端102f側とし、反対側を後端102r側とする。
【0012】
ハウジング102と一体である把持部104の先端104fには、第2読取窓182が底面に位置する凹状の窪みが形成されている。ハンドヘルドプリンタ101は、第2読取窓182の奥側に、コードシンボルを光学的に読み取る第2読取部としての第2スキャナ181(図4参照)を配置している。第2スキャナ181は、第2読取窓182の前面に形成される読取空間に、読取光として所定パターンのLED光を照射する。
【0013】
把持部104の上面における第2読取窓182寄りの位置には、プッシュ型の操作キー141が配置されている。操作キー141の配置位置は、把持部104を把持している手の指(例えば人差し指)で、プッシュ可能な位置である。操作キー141がプッシュされた場合にハンドヘルドプリンタ101で実行される処理については、後述する。
【0014】
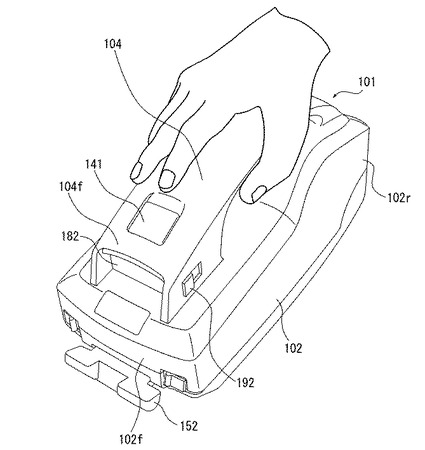
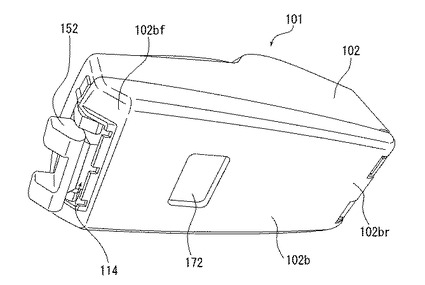
図2は、図1とは別の方向から見たハンドヘルドプリンタ101を示す外観斜視図である。ハウジング102における把持部104とは反対側に位置する面を、ラベル排出面102bと呼ぶ。ラベル排出面102bの先端102bfは、傾斜している。ハウジング102は、ラベル排出面102bにおける傾斜部位に、ラベル排出口114を有する。ラベル排出口114は、ハウジング102の幅方向に沿って形成されている貫通孔である。ラベル排出口114には、後述するラベル押え部152が配置されている。
【0015】
ラベル排出面102bにおけるラベル排出口114よりも後端102brに寄せた位置には、第1読取窓172が底面に位置する凹状の窪みが形成されている。ハンドヘルドプリンタ101は、第1読取窓172の奥側に、コードシンボルを光学的に読み取る第1読取部としての第1スキャナ171(図4参照)を配置している。第1スキャナ171は、第1読取窓172の前面に形成される読取空間に、読取光として所定パターンのLED光を照射する。
【0016】
図1の説明に戻る。ハウジング102の外面には、スライドスイッチ192が配置されている。より詳細には、スライドスイッチ192の配置位置は、把持部104の側面における第2読取窓182寄りの位置である。スライドスイッチ192のスライド操作に応じて、ハウジング102が内蔵するスイッチ回路191(図6参照)が、第1スキャナ171と第2スキャナ181とのCPU117(図6参照)に対する接続を、選択的に切り替える。すなわち、スライドスイッチ192のスライド操作によって第1スキャナ171がCPU117に接続されて使用可能となれば、第2スキャナ181の使用は不可となる。これに対し、スライドスイッチ192のスライド操作によって第2スキャナ181がCPU117に接続されて使用可能となれば、第1スキャナ171の使用は不可となる。
【0017】
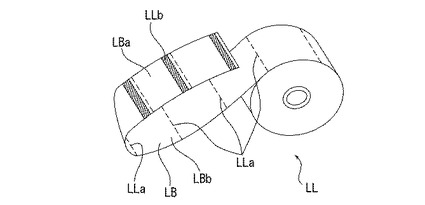
図3は、ライナレスラベルLLを示す斜視図である。剥離台紙が不要なライナレスラベルLLは、一定間隔で形成されたミシン目LLaを有する。ミシン目LLa同士が区切る部分が、単体のラベルLBとなる。各々のラベルLBは、粘着剤が塗布されている粘着面LBaと、熱印加による発色する印字面LBbとを有する。印字面LBbの表面には離型剤が塗布されている。粘着面LBaには、ライナレスラベルLLの幅全域に亘る黒色のラインLLbが印刷されている。ラインLLbは、各々のラベルLBにおいて、一つ先端側の別のラベルLBとの区切りであるミシン目LLaに隣接する位置で、ミシン目LLaに沿っている。このようなライナレスラベルLLは、粘着面LBaを内側にしたロール状態で、ハウジング102に収納される。
【0018】
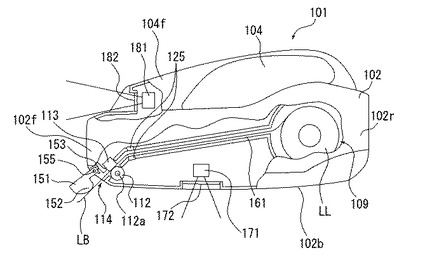
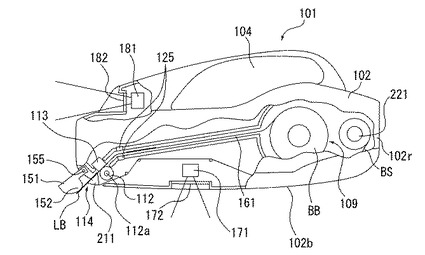
図4は、ハンドヘルドプリンタ101を一部を切り欠いて示す側面図である。ハウジング102は、後端102r側に位置する軸(図示せず)を回動支点にして、開閉する。開閉するハウジング102の内部には、ロール状のライナレスラベルLLを収納して支持する収納部109が設けられている。また、ハウジング102の内部には、収納部109から引き出したライナレスラベルLLをラベル排出口114に案内する案内経路161が形成されている。案内経路161を介して、一対の光透過センサ125が対向配置されている。ライナレスラベルLLの搬送中に、ラインLLbが光透過センサ125の間を通過する場合、ラインLLbは光透過センサ125の光透過を遮断する。光透過センサ125は、光遮断を検出し、検出結果を出力する。光透過センサ125の検出結果は、CPU117に入力される。ライナレスラベルLLのミシン目LLaが黒色のラインLLbに隣接していることから、CPU117は、光透過センサ125が出力する検出結果の入力によって、ミシン目LLaの通過を判定する(図7参照)。ハウジング102の先端102f側には、回転駆動される搬送機構としてのプラテン112と印字部としてのサーマルヘッド113とが対向配置されている。プラテン112は、ハウジング102が内蔵するステッピングモータ110(図6参照)の回転力がプラテン軸112aに伝達されることにより回転する。サーマルヘッド113は、ライン状の発熱体(図示せず)をプラテン112に当接させる。
【0019】
プラテン112とサーマルヘッド113とがライナレスラベルLLを挟持した状態でプラテン112が回転することによって、ライナレスラベルLLはラベル排出口114に向けて搬送される。ライナレスラベルLLの搬送過程で、サーマルヘッド113の発熱体は、印字面LBbに印字する。ラベル排出口114は、印字されたライナレスラベルLLを通過させてハウジング102の外部に排出する。ラベル排出口114から排出されるライナレスラベルLLは、後述するようにして切断され単体のラベルLBとなる。以下の説明では、ラベル排出口114が排出している状態のライナレスラベルLLについては、未だ切断されておらずライナレスラベルLLと連続するものであっても、単に「ラベルLB」と呼ぶことがある。
【0020】
ハンドヘルドプリンタ101は、ラベル排出口114に位置させて、回動軸155を支点にして揺動自在な揺動体151を備えている。揺動体151の配置位置は、ライナレスラベルLLの印字面LBb側である。揺動体151の一部は、ハウジング102の外側に位置するラベル押え部152である。ラベル押え部152は、案内経路161に幅方向に沿って直線的な形状を有する。揺動体151の別の一部は、ハウジング102の内側に位置するラベル切断部153である。揺動体151に対してラベル押え部152を持ち上げるように外力を付与すると、ラベル切断部153が案内経路161に侵入する。このとき、揺動体151は付勢される。外力の付与を解除すると、付勢されていた揺動体151は、回動軸155を支点に揺動して位置復帰する。これにより、ラベル切断部153は案内経路161から離反する。
【0021】
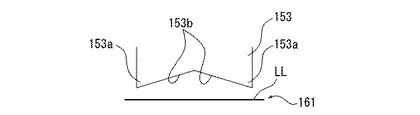
図5は、ラベル切断部153を示す模式図である。ラベル切断部153は、案内経路161の幅方向の両端に位置する一対の頂点部153aと、一対の頂点部153aから中央に向かい案内経路161から遠ざかる一対の斜めの辺部153bとを有する。このようなラベル切断部153は、ラベル排出口114が排出しているライナレスラベルLLのミシン目LLaに切れ目を形成する。そのため、後述するように、ライナレスラベルLLのミシン目LLaがラベル切断部153の揺動軌跡上に位置付けられる。
【0022】
ラベル排出口114が排出しているライナレスラベルLLの先端にあるラベルLBの粘着面LBaを被貼付物WK(図9参照)の一面に接着させた状態で、ハウジング102を被貼付物WKに押し付けることで、ラベル押え部152でラベルLBの印字面LBbを押える。これにより、粘着面LBaは被貼付物WKに密着する。このとき、揺動体151は揺動して、ラベル切断部153が案内経路161に侵入する。この過程で、まず、ラベル切断部153の頂点部153aがミシン目LLaに突き当たり点状の切れ目を形成し、辺部153bが次第に切れ目をミシン目LLaに沿って拡張する。このようにして、ミシン目LLaには、切れ目が形成される。後述するように、ラベルLBを含むライナレスラベルLLは、引き出し不可にロックされている。そこで、ハンドヘルドプリンタ101を被貼付物WKの表面に沿って引くことにより、ラベルLBを含むライナレスラベルLLは、両端側から引っ張られる。すると、ミシン目LLaが切れ目を有するので、ライナレスラベルLLは、被貼付物WKに接着したラベルLBを残して切断される。このようにして、ラベル排出口114が排出したラベルLBは、切断される。
【0023】
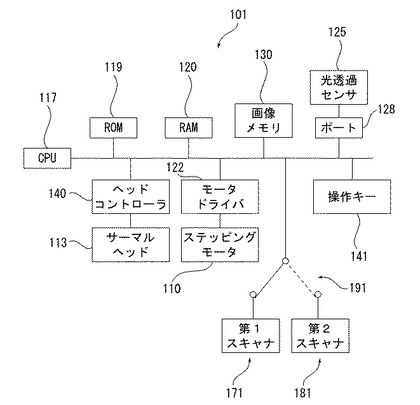
図6は、ハンドヘルドプリンタ101のハードウェア構成を示すブロック図である。ハンドヘルドプリンタ101は、各種演算処理を実行して各部を集中的に制御する制御部としてのCPU117を備える。固定データを固定的に格納するROM119と、可変データを書換え自在に格納するRAM120とが、CPU117に接続している。ROM119は制御プログラムを格納している。CPU117は、ROM119が格納している制御プログラムに従い、RAM120をワークエリアとして利用しつつ各種の処理を実行する。
【0024】
CPU117には、操作キー141が接続している。また、光透過センサ125が、ポート128を介して、CPU117に接続している。
【0025】
ハンドヘルドプリンタ101は、プラテン112を回転駆動するためのステッピングモータ110を駆動制御するためのモータドライバ122と、サーマルヘッド113が有する発熱体(図示せず)を発熱駆動してサーマルヘッド113に印字動作をさせるヘッドコントローラ140とを備えている。モータドライバ122及びヘッドコントローラ140は、CPU117に接続している。
【0026】
CPU117には、スイッチ回路191を介して、第1スキャナ171と第2スキャナ181とが接続している。第1スキャナ171及び第2スキャナ181は、スキャン処理として、読取光が照射されたコードシンボルからの反射光を受光素子(例えばCCD)によって受光し、受光素子の出力信号に基づくコードシンボルの受光信号をデコードし、そのコードシンボルが記述している印字情報(例えば、被貼付物WKの配送先を特定する配送先コード)のデータを、CPU117に出力する。
【0027】
CPU117には画像メモリ130が接続している。CPU117は、第1スキャナ171又は第2スキャナ181が出力する印字情報のデータを、ドットパターンからなる画像データに変換して画像メモリ130に展開する。CPU117は、画像メモリ130に展開された画像データから1ライン毎のデータをヘッドコントローラ140に出力する。ヘッドコントローラ140は、ドットパターンの有るドットに対応する発熱体(図示せず)を発熱駆動する。こうして、サーマルヘッド113は印字動作する。
【0028】
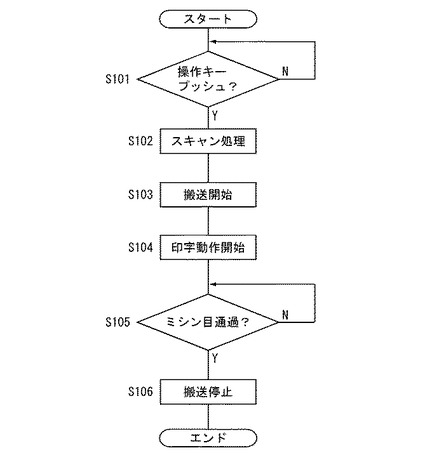
図7は、ハンドヘルドプリンタ101のCPU117が実行する処理の流れを示すフローチャートである。CPU117は、操作キー141のプッシュ操作に待機している(ステップS101)。CPU117は、操作キー141のプッシュ操作を判定すると(ステップS101のY)、スライドスイッチ192のスライド操作によって使用可能となっている第1スキャナ171又は第2スキャナ181に、スキャン処理を実行させる(ステップS102)。CPU117は、スキャン処理を実行した第1スキャナ171又は第2スキャナ181から出力される印字情報のデータを画像メモリ130に画像データとして展開する。次に、CPU117は、ステッピングモータ110を回転駆動して、プラテン112にライナレスラベルLLの搬送を開始させると共に(ステップS103)、画像メモリ130に展開された画像データに基づいて、ヘッドコントローラ140を制御してサーマルヘッド113に印字を開始させる(ステップS104)。なお、画像メモリ130に展開された画像データから全ラインのデータが出力されて、印字動作は終了する。搬送中のライナレスラベルLLのラインLLbが光透過センサ125の光透過を遮断することによって光透過センサ125が検出結果を出力すると、CPU117は、ミシン目LLaの通過を判定し(ステップS105のY)、設定時間経過後に、ステッピングモータ110の回転駆動を停止して、プラテン112による搬送を停止させる(ステップS106)。ライナレスラベルLLのミシン目LLaがラベル切断部153の揺動軌跡上の位置(ミシン目位置)に位置するタイミングで、搬送は停止される。搬送停止時においては、ステッピングモータ110の励磁相に励磁電流(駆動電流)を流し続けることによって、CPU117は、ステッピングモータ110の回転位置を位置保持する制御をする。ステッピングモータ110の回転位置の位置保持により、プラテン112の回転も規制される。プラテン112とサーマルヘッド113とが挟持するライナレスラベルLLは、搬送がロックされ、外力が付与されてもラベル排出口114から引き出されない。ステップS106の搬送停止状態では、ミシン目LLaが区切るラベルLBの一部は、ラベル排出口114からハウジング102の外部に露出して、ラベル押え部152の下方に位置する。
【0029】
図8は、ハンドヘルドプリンタ101の変形例を一部を切り欠いて示す側面図である。図1ないし図7に基づいて説明した部分と同じ部分については同じ符号で示し、説明も省略する。
【0030】
図8に示すハンドヘルドプリンタ101では、ライナレスラベルLLに代えて、剥離台紙BSに単体のラベル(ライナレスラベルLLと同様に、ラベルLBと呼ぶ)が一定間隔で貼付されているラベル用紙BBが使用される。このラベルLBも、印字面LBbと粘着面LBaとを有する(図8では図示せず)。ラベル用紙BBは、収納部109に収納され、プラテン112の回転によって搬送される。ハウジング102の後端102r側には、ステッピングモータ110の駆動によりプラテン112と同期して回転する巻取ローラ221が配置されている。また、ラベル排出口114には、剥離台紙BSからラベルLBを剥離する剥離部211が配置されている。収納部109から引き出し搬送されるラベル用紙BBは、剥離部211に沿って折り返される。このとき、ラベルLBは、剥離台紙BSから剥離されてラベル排出口114から排出される。そして、剥離台紙BSのみが巻取ローラ221に向けて案内されて、巻取ローラ221によって巻き取られる。なお、ラベルLBに切れ目を形成することを要さないため、揺動体151はラベル切断部153(図4等参照)を備えない。
【0031】
ラベル用紙BBは、剥離台紙BSのみの部分とラベルLBが貼付されている部分とでは、透過度が異なる。光透過センサ125は、透過度の変化を検出して、検出結果を出力する。図7のフローチャートのステップS105では、CPU117は、光透過センサ125が出力する検出結果に応じて、ラベルLBの通過を判定し、設定時間経過後に、ステッピングモータ110の回転駆動を停止して、プラテン112による搬送を停止させる(ステップS106)。ラベル用紙BBの搬送は、ラベルLBの一部だけが剥離台紙BSに残るタイミングで、停止される。
【0032】
次に、ハンドヘルドプリンタ101の使用状態について図9及び図10に基づいて説明する。
【0033】
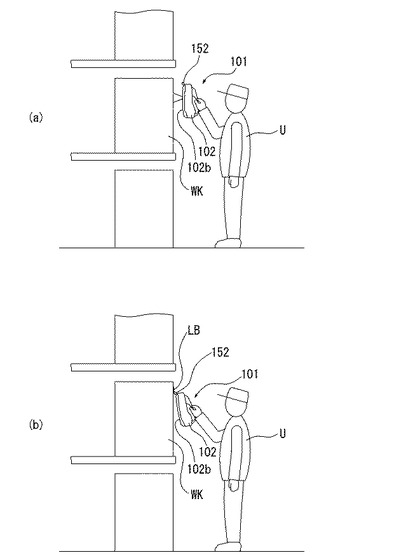
図9は、ハンドヘルドプリンタ101の使用状態を示す模式図である。以下に説明するように、読取作業と貼付作業とに際して、ハンドヘルドプリンタ101の姿勢は一定のままで良い。
【0034】
まず、読取作業について説明する。作業員Uは、ラベルLBを貼付するべき被貼付物WKと対面する位置に移動する。そして、把持部104を把持する手の手首を大きく反らせたり捻ったりすることなく伸ばした状態で、ハウジング102のラベル排出面102bを被貼付物WKに対面させる。このとき、第1読取窓172を、被貼付物WKに付されている被貼付物情報としてのコードシンボル(図示せず)の正面位置に位置付ける。つまり、コードシンボルを第1スキャナ171の読取空間に位置付ける。コードシンボルは、被貼付物WKの配送先コードを記述している。このとき、前提として、スライドスイッチ192のスライド操作によって、第1スキャナ171が使用可能な状態にしておく。次に、把持部104を把持している手の指で、操作キー141をプッシュする。操作キー141のプッシュ操作によって、コードシンボルには、ラベル排出面102bに位置する第1読取窓172から読取光が照射される。そして、図7に基づいて説明したように、コードシンボルが記述している配送先コードが印字されたラベルLBがラベル排出口114から排出される。
【0035】
次に、貼付作業について説明する。読取作業を終えた作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKに対面させたまま、ラベル排出面102bを被貼付物WKに対して押し付ける。これにより、ラベル押え部152がラベル排出口114から排出されているラベルLBの印字面LBbを押え付けるので、ラベルLBの粘着面LBaが被貼付物WKに対して密着する。このとき、ライナレスラベルLLが使用されるハンドヘルドプリンタ101であれば、揺動体151が被貼付物WKからの押圧力によって揺動してラベル切断部153が案内経路161に侵入し、ミシン目LLaには切れ目が形成される。続けて、作業員Uは、ハンドヘルドプリンタ101を被貼付物WKの表面に沿って移動させる。このとき、ライナレスラベルLLが使用されるハンドヘルドプリンタ101であれば、被貼付物WKに接着しているラベルLBは切断される。そして、引き続き、ラベル押え部152をラベルLBの印字面LBbに沿って滑らせて、ラベルLBの粘着面LBaを被貼付物WKに対して貼り付ける。
【0036】
このように、読取作業と貼付作業とに際して、作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKと対面させたままでよい。このとき、ハウジング102の姿勢を変えるために把持部104を把持する手の手首を大きく反らせたり捻ったりするような手首にストレスがかかる不自然な動作は作業員Uには要求されない。そのため、作業員Uの身体負担の軽減を図ることができる。
【0037】
さらに、作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKと対面させたまま読取作業と貼付作業とを行うことができることから、両作業の間に作業員Uが自身の体勢を変えたりハウジング102の向きを変えたりすることを要さない。そのため、作業員Uは、読取作業と貼付作業とを、断続的ではない一連の作業として行うことができる。
【0038】
したがって、ハンドヘルドプリンタ101によれば、読取作業と貼付作業とに際しての作業性を極めて良好なものにすることが期待できる。
【0039】
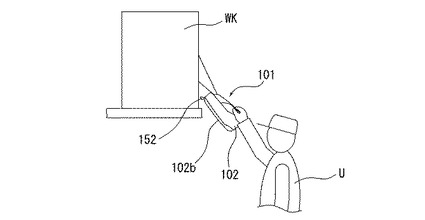
図10は、ハンドヘルドプリンタ101の使用状態の別の一例を示す模式図である。作業員Uは、自分の上背よりも高い位置の被貼付物WKに対して、読取作業と貼付作業とを行う場合がある。この場合、第1スキャナ171を使用してコードシンボルの読取作業を行おうとすると、第1読取窓172をコードシンボルに向けるために、把持部104を把持している手の手首を大きく反らせなくてはいけない。これは、作業員Uの身体への負担につながる。
【0040】
そこで、自分の上背よりも高い位置の被貼付物WKに対して読取作業を行う場合には、第2スキャナ181を使用すればよい。この場合、作業員Uは、スライドスイッチ192のスライド操作によって、第2スキャナ181が使用可能な状態にしておく。そして、作業員Uは、第2スキャナ181が使用可能な状態のハンドヘルドプリンタ101の把持部104を把持した状態で、ターゲットの被貼付物WKの下方位置に移動する。
【0041】
次に、作業員Uは、把持部104を把持している手の手首を伸ばした状態にして、把持部104の先端104fに位置する第2読取窓182を、被貼付物WKに付されているコードシンボルに向ける。つまり、コードシンボルを第2スキャナ181の読取空間に位置付ける。そして、把持部104を把持している手の指で、操作キー141をプッシュする。操作キー141のプッシュ操作によって、コードシンボルには、第2読取窓182から読取光が照射される。そして、図7に基づいて説明したように、コードシンボルが記述している配送先コードが印字されたラベルLBがラベル排出口114から排出される。
【0042】
その後の貼付作業では、把持部104を把持している手の手首を僅かに反らせながらハウジング102を上昇させて、ラベル排出面102bを被貼付物WKに対面させる。そして、図9に基づいて説明した貼付作業と同様に、ハウジング102を被貼付物WKに対して押し付けて、被貼付物WKに沿って引けばよい。
【0043】
このように、読取作業を行う作業員Uは、把持部104を把持している手の手首を伸ばしたままで良い。その後の貼付作業でも、作業員Uは、把持部104を把持している手の手首の向きを僅かに変えるだけでよい。つまり、把持部104を把持する手の手首にストレスがかかる不自然な動作は作業員Uには要求されない。そのため、作業員Uの身体負担の軽減を図ることができる。
【符号の説明】
【0044】
101…ハンドヘルドプリンタ
102…ハウジング
102b…ラベル排出面
104…把持部
112…プラテン(搬送機構)
113…サーマルヘッド(印字部)
114…ラベル排出口
117…CPU(制御部)
152…ラベル押え部
153…ラベル切断部
171…第1スキャナ(第1読取部)
172…第1読取窓
181…第2スキャナ(第2読取部)
182…第2読取窓
211…剥離部
LB…ラベル
LL…ライナレスラベル
BB…ラベル用紙
BS…剥離台紙
WK…被貼付物
【技術分野】
【0001】
本発明は、片手で使用するハンドヘルドプリンタに関する。
【背景技術】
【0002】
従来、宅配便の荷物の集配所では、小型のスキャナ付きのプリンタ(例えば特許文献1参照)が作業員によって使用されている。集配所の作業員は、まず、荷物に付されて配送先コードを記述するコードシンボルをスキャナに読み取らせる(以下、読取作業と呼ぶ)。プリンタは、スキャナが読み取った配送先コードをラベルに印字して発行する。このとき、ラベルがライナレスラベルであれば、プリンタにはカッタが設けられており、作業員はライナレスラベルをカッタに押し当てて切断して単体のラベルとする。また、ラベルが剥離台紙に貼付されたものであれば、ラベルは剥離台紙から剥離されて発行される。作業員は、プリンタが発行したラベルを、配送先コードの読み取りを行った荷物に対して貼り付ける(以下、貼付作業と呼ぶ)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平4−310767号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1が開示しているスキャナ付きプリンタを使用して作業員が読取作業を行う場合、作業員は、長尺のハウジング(筐体)を利き手で上から掴み、その手首を無理に折り曲げて、ハウジング(筐体)の先端に位置する読取窓(スキャナ部)をコードシンボルの前面に位置付けなければならない。そして、続く貼付作業では、ハウジング(筐体)を利き手とは別の手に持ち変えてから、利き手でラベルを取って手作業で荷物に貼り付けなければならない。そのため、作業者の身体への負担が大きい。また、両作業は、それぞれ全く異なる動作を作業者に要求するため、読取作業と貼付作業とは、断続的に行われてしまう。このように、特許文献1が開示しているスキャナ付きプリンタを使用して読取作業と貼付作業とを行う場合、作業性は非常に悪いものとなっている。
【0005】
本発明は、続けて行われる読取作業と貼付作業との作業性を良好にすることを目的とする。
【課題を解決するための手段】
【0006】
本発明のハンドヘルドプリンタは、ハウジングと、前記ハウジング内でライナレスラベルを搬送する搬送機構と、前記搬送機構が搬送するライナレスラベルに対して印字動作を行う印字部と、ライナレスラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられて前記搬送機構が搬送するライナレスラベルを排出するラベル排出口と、前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるライナレスラベルを被貼付物に押え付けるラベル押え部と、前記ラベル押え部による押え付けに応じて、前記ラベル排出口から排出されるライナレスラベルに突き当たり切れ目を形成するラベル切断部と、前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、を備える。
【0007】
別の面から見た本発明のハンドヘルドプリンタは、ハウジングと、前記ハウジング内でラベルが剥離台紙に貼付されたラベル用紙を搬送する搬送機構と、前記搬送機構が搬送するラベル用紙に対して印字動作を行う印字部と、ラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられてラベルが通過自在なラベル排出口と、前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、前記ラベル排出口に配置され、前記搬送機構が搬送するラベル用紙の剥離台紙からラベルを剥離させて前記ラベル排出口から排出させる剥離部と、前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるラベルを被貼付物に押え付けるラベル押え部と、前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、を備える。
【発明の効果】
【0008】
本発明によれば、ラベル排出面を被貼付物と対面させたまま読取作業と貼付作業とを一連の作業として行えることとなり、両作業の作業性を良好にすることができる。
【図面の簡単な説明】
【0009】
【図1】ハンドヘルドプリンタを示す外観斜視図である。
【図2】図1とは別の方向から見たハンドヘルドプリンタを示す外観斜視図である。
【図3】ライナレスラベルを示す斜視図である。
【図4】ハンドヘルドプリンタを一部を切り欠いて示す側面図である。
【図5】ラベル切断部を示す模式図である。
【図6】ハンドヘルドプリンタのハードウェア構成を示すブロック図である。
【図7】ハンドヘルドプリンタのCPUが実行する処理の流れを示すフローチャートである。
【図8】ハンドヘルドプリンタの変形例を一部を切り欠いて示す側面図である。
【図9】ハンドヘルドプリンタの使用状態を示す模式図である。
【図10】ハンドヘルドプリンタの使用状態の別の一例を示す模式図である。
【発明を実施するための形態】
【0010】
本発明の実施の形態について図1ないし図10に基づいて説明する。本実施の形態は、宅配便の集配所で使用されるハンドヘルドプリンタ101への適用例である。
【0011】
図1は、ハンドヘルドプリンタ101を示す外観斜視図である。ハンドヘルドプリンタ101は、一方向に長い直方体を変形させた形状のハウジング102を有する。ハウジング102は、その一面に、ハウジング102の長手方向に沿った把持部104を配置している。ハンドヘルドプリンタ101のユーザである作業員U(図9参照)は、片方の手(図1中に実線で示す)で把持部104を把持した状態で、ハンドヘルドプリンタ101を自在に移動させることができる。把持部104を把持する手を通る腕の延長側を、ハンドヘルドプリンタ101(ハウジング102)の先端102f側とし、反対側を後端102r側とする。
【0012】
ハウジング102と一体である把持部104の先端104fには、第2読取窓182が底面に位置する凹状の窪みが形成されている。ハンドヘルドプリンタ101は、第2読取窓182の奥側に、コードシンボルを光学的に読み取る第2読取部としての第2スキャナ181(図4参照)を配置している。第2スキャナ181は、第2読取窓182の前面に形成される読取空間に、読取光として所定パターンのLED光を照射する。
【0013】
把持部104の上面における第2読取窓182寄りの位置には、プッシュ型の操作キー141が配置されている。操作キー141の配置位置は、把持部104を把持している手の指(例えば人差し指)で、プッシュ可能な位置である。操作キー141がプッシュされた場合にハンドヘルドプリンタ101で実行される処理については、後述する。
【0014】
図2は、図1とは別の方向から見たハンドヘルドプリンタ101を示す外観斜視図である。ハウジング102における把持部104とは反対側に位置する面を、ラベル排出面102bと呼ぶ。ラベル排出面102bの先端102bfは、傾斜している。ハウジング102は、ラベル排出面102bにおける傾斜部位に、ラベル排出口114を有する。ラベル排出口114は、ハウジング102の幅方向に沿って形成されている貫通孔である。ラベル排出口114には、後述するラベル押え部152が配置されている。
【0015】
ラベル排出面102bにおけるラベル排出口114よりも後端102brに寄せた位置には、第1読取窓172が底面に位置する凹状の窪みが形成されている。ハンドヘルドプリンタ101は、第1読取窓172の奥側に、コードシンボルを光学的に読み取る第1読取部としての第1スキャナ171(図4参照)を配置している。第1スキャナ171は、第1読取窓172の前面に形成される読取空間に、読取光として所定パターンのLED光を照射する。
【0016】
図1の説明に戻る。ハウジング102の外面には、スライドスイッチ192が配置されている。より詳細には、スライドスイッチ192の配置位置は、把持部104の側面における第2読取窓182寄りの位置である。スライドスイッチ192のスライド操作に応じて、ハウジング102が内蔵するスイッチ回路191(図6参照)が、第1スキャナ171と第2スキャナ181とのCPU117(図6参照)に対する接続を、選択的に切り替える。すなわち、スライドスイッチ192のスライド操作によって第1スキャナ171がCPU117に接続されて使用可能となれば、第2スキャナ181の使用は不可となる。これに対し、スライドスイッチ192のスライド操作によって第2スキャナ181がCPU117に接続されて使用可能となれば、第1スキャナ171の使用は不可となる。
【0017】
図3は、ライナレスラベルLLを示す斜視図である。剥離台紙が不要なライナレスラベルLLは、一定間隔で形成されたミシン目LLaを有する。ミシン目LLa同士が区切る部分が、単体のラベルLBとなる。各々のラベルLBは、粘着剤が塗布されている粘着面LBaと、熱印加による発色する印字面LBbとを有する。印字面LBbの表面には離型剤が塗布されている。粘着面LBaには、ライナレスラベルLLの幅全域に亘る黒色のラインLLbが印刷されている。ラインLLbは、各々のラベルLBにおいて、一つ先端側の別のラベルLBとの区切りであるミシン目LLaに隣接する位置で、ミシン目LLaに沿っている。このようなライナレスラベルLLは、粘着面LBaを内側にしたロール状態で、ハウジング102に収納される。
【0018】
図4は、ハンドヘルドプリンタ101を一部を切り欠いて示す側面図である。ハウジング102は、後端102r側に位置する軸(図示せず)を回動支点にして、開閉する。開閉するハウジング102の内部には、ロール状のライナレスラベルLLを収納して支持する収納部109が設けられている。また、ハウジング102の内部には、収納部109から引き出したライナレスラベルLLをラベル排出口114に案内する案内経路161が形成されている。案内経路161を介して、一対の光透過センサ125が対向配置されている。ライナレスラベルLLの搬送中に、ラインLLbが光透過センサ125の間を通過する場合、ラインLLbは光透過センサ125の光透過を遮断する。光透過センサ125は、光遮断を検出し、検出結果を出力する。光透過センサ125の検出結果は、CPU117に入力される。ライナレスラベルLLのミシン目LLaが黒色のラインLLbに隣接していることから、CPU117は、光透過センサ125が出力する検出結果の入力によって、ミシン目LLaの通過を判定する(図7参照)。ハウジング102の先端102f側には、回転駆動される搬送機構としてのプラテン112と印字部としてのサーマルヘッド113とが対向配置されている。プラテン112は、ハウジング102が内蔵するステッピングモータ110(図6参照)の回転力がプラテン軸112aに伝達されることにより回転する。サーマルヘッド113は、ライン状の発熱体(図示せず)をプラテン112に当接させる。
【0019】
プラテン112とサーマルヘッド113とがライナレスラベルLLを挟持した状態でプラテン112が回転することによって、ライナレスラベルLLはラベル排出口114に向けて搬送される。ライナレスラベルLLの搬送過程で、サーマルヘッド113の発熱体は、印字面LBbに印字する。ラベル排出口114は、印字されたライナレスラベルLLを通過させてハウジング102の外部に排出する。ラベル排出口114から排出されるライナレスラベルLLは、後述するようにして切断され単体のラベルLBとなる。以下の説明では、ラベル排出口114が排出している状態のライナレスラベルLLについては、未だ切断されておらずライナレスラベルLLと連続するものであっても、単に「ラベルLB」と呼ぶことがある。
【0020】
ハンドヘルドプリンタ101は、ラベル排出口114に位置させて、回動軸155を支点にして揺動自在な揺動体151を備えている。揺動体151の配置位置は、ライナレスラベルLLの印字面LBb側である。揺動体151の一部は、ハウジング102の外側に位置するラベル押え部152である。ラベル押え部152は、案内経路161に幅方向に沿って直線的な形状を有する。揺動体151の別の一部は、ハウジング102の内側に位置するラベル切断部153である。揺動体151に対してラベル押え部152を持ち上げるように外力を付与すると、ラベル切断部153が案内経路161に侵入する。このとき、揺動体151は付勢される。外力の付与を解除すると、付勢されていた揺動体151は、回動軸155を支点に揺動して位置復帰する。これにより、ラベル切断部153は案内経路161から離反する。
【0021】
図5は、ラベル切断部153を示す模式図である。ラベル切断部153は、案内経路161の幅方向の両端に位置する一対の頂点部153aと、一対の頂点部153aから中央に向かい案内経路161から遠ざかる一対の斜めの辺部153bとを有する。このようなラベル切断部153は、ラベル排出口114が排出しているライナレスラベルLLのミシン目LLaに切れ目を形成する。そのため、後述するように、ライナレスラベルLLのミシン目LLaがラベル切断部153の揺動軌跡上に位置付けられる。
【0022】
ラベル排出口114が排出しているライナレスラベルLLの先端にあるラベルLBの粘着面LBaを被貼付物WK(図9参照)の一面に接着させた状態で、ハウジング102を被貼付物WKに押し付けることで、ラベル押え部152でラベルLBの印字面LBbを押える。これにより、粘着面LBaは被貼付物WKに密着する。このとき、揺動体151は揺動して、ラベル切断部153が案内経路161に侵入する。この過程で、まず、ラベル切断部153の頂点部153aがミシン目LLaに突き当たり点状の切れ目を形成し、辺部153bが次第に切れ目をミシン目LLaに沿って拡張する。このようにして、ミシン目LLaには、切れ目が形成される。後述するように、ラベルLBを含むライナレスラベルLLは、引き出し不可にロックされている。そこで、ハンドヘルドプリンタ101を被貼付物WKの表面に沿って引くことにより、ラベルLBを含むライナレスラベルLLは、両端側から引っ張られる。すると、ミシン目LLaが切れ目を有するので、ライナレスラベルLLは、被貼付物WKに接着したラベルLBを残して切断される。このようにして、ラベル排出口114が排出したラベルLBは、切断される。
【0023】
図6は、ハンドヘルドプリンタ101のハードウェア構成を示すブロック図である。ハンドヘルドプリンタ101は、各種演算処理を実行して各部を集中的に制御する制御部としてのCPU117を備える。固定データを固定的に格納するROM119と、可変データを書換え自在に格納するRAM120とが、CPU117に接続している。ROM119は制御プログラムを格納している。CPU117は、ROM119が格納している制御プログラムに従い、RAM120をワークエリアとして利用しつつ各種の処理を実行する。
【0024】
CPU117には、操作キー141が接続している。また、光透過センサ125が、ポート128を介して、CPU117に接続している。
【0025】
ハンドヘルドプリンタ101は、プラテン112を回転駆動するためのステッピングモータ110を駆動制御するためのモータドライバ122と、サーマルヘッド113が有する発熱体(図示せず)を発熱駆動してサーマルヘッド113に印字動作をさせるヘッドコントローラ140とを備えている。モータドライバ122及びヘッドコントローラ140は、CPU117に接続している。
【0026】
CPU117には、スイッチ回路191を介して、第1スキャナ171と第2スキャナ181とが接続している。第1スキャナ171及び第2スキャナ181は、スキャン処理として、読取光が照射されたコードシンボルからの反射光を受光素子(例えばCCD)によって受光し、受光素子の出力信号に基づくコードシンボルの受光信号をデコードし、そのコードシンボルが記述している印字情報(例えば、被貼付物WKの配送先を特定する配送先コード)のデータを、CPU117に出力する。
【0027】
CPU117には画像メモリ130が接続している。CPU117は、第1スキャナ171又は第2スキャナ181が出力する印字情報のデータを、ドットパターンからなる画像データに変換して画像メモリ130に展開する。CPU117は、画像メモリ130に展開された画像データから1ライン毎のデータをヘッドコントローラ140に出力する。ヘッドコントローラ140は、ドットパターンの有るドットに対応する発熱体(図示せず)を発熱駆動する。こうして、サーマルヘッド113は印字動作する。
【0028】
図7は、ハンドヘルドプリンタ101のCPU117が実行する処理の流れを示すフローチャートである。CPU117は、操作キー141のプッシュ操作に待機している(ステップS101)。CPU117は、操作キー141のプッシュ操作を判定すると(ステップS101のY)、スライドスイッチ192のスライド操作によって使用可能となっている第1スキャナ171又は第2スキャナ181に、スキャン処理を実行させる(ステップS102)。CPU117は、スキャン処理を実行した第1スキャナ171又は第2スキャナ181から出力される印字情報のデータを画像メモリ130に画像データとして展開する。次に、CPU117は、ステッピングモータ110を回転駆動して、プラテン112にライナレスラベルLLの搬送を開始させると共に(ステップS103)、画像メモリ130に展開された画像データに基づいて、ヘッドコントローラ140を制御してサーマルヘッド113に印字を開始させる(ステップS104)。なお、画像メモリ130に展開された画像データから全ラインのデータが出力されて、印字動作は終了する。搬送中のライナレスラベルLLのラインLLbが光透過センサ125の光透過を遮断することによって光透過センサ125が検出結果を出力すると、CPU117は、ミシン目LLaの通過を判定し(ステップS105のY)、設定時間経過後に、ステッピングモータ110の回転駆動を停止して、プラテン112による搬送を停止させる(ステップS106)。ライナレスラベルLLのミシン目LLaがラベル切断部153の揺動軌跡上の位置(ミシン目位置)に位置するタイミングで、搬送は停止される。搬送停止時においては、ステッピングモータ110の励磁相に励磁電流(駆動電流)を流し続けることによって、CPU117は、ステッピングモータ110の回転位置を位置保持する制御をする。ステッピングモータ110の回転位置の位置保持により、プラテン112の回転も規制される。プラテン112とサーマルヘッド113とが挟持するライナレスラベルLLは、搬送がロックされ、外力が付与されてもラベル排出口114から引き出されない。ステップS106の搬送停止状態では、ミシン目LLaが区切るラベルLBの一部は、ラベル排出口114からハウジング102の外部に露出して、ラベル押え部152の下方に位置する。
【0029】
図8は、ハンドヘルドプリンタ101の変形例を一部を切り欠いて示す側面図である。図1ないし図7に基づいて説明した部分と同じ部分については同じ符号で示し、説明も省略する。
【0030】
図8に示すハンドヘルドプリンタ101では、ライナレスラベルLLに代えて、剥離台紙BSに単体のラベル(ライナレスラベルLLと同様に、ラベルLBと呼ぶ)が一定間隔で貼付されているラベル用紙BBが使用される。このラベルLBも、印字面LBbと粘着面LBaとを有する(図8では図示せず)。ラベル用紙BBは、収納部109に収納され、プラテン112の回転によって搬送される。ハウジング102の後端102r側には、ステッピングモータ110の駆動によりプラテン112と同期して回転する巻取ローラ221が配置されている。また、ラベル排出口114には、剥離台紙BSからラベルLBを剥離する剥離部211が配置されている。収納部109から引き出し搬送されるラベル用紙BBは、剥離部211に沿って折り返される。このとき、ラベルLBは、剥離台紙BSから剥離されてラベル排出口114から排出される。そして、剥離台紙BSのみが巻取ローラ221に向けて案内されて、巻取ローラ221によって巻き取られる。なお、ラベルLBに切れ目を形成することを要さないため、揺動体151はラベル切断部153(図4等参照)を備えない。
【0031】
ラベル用紙BBは、剥離台紙BSのみの部分とラベルLBが貼付されている部分とでは、透過度が異なる。光透過センサ125は、透過度の変化を検出して、検出結果を出力する。図7のフローチャートのステップS105では、CPU117は、光透過センサ125が出力する検出結果に応じて、ラベルLBの通過を判定し、設定時間経過後に、ステッピングモータ110の回転駆動を停止して、プラテン112による搬送を停止させる(ステップS106)。ラベル用紙BBの搬送は、ラベルLBの一部だけが剥離台紙BSに残るタイミングで、停止される。
【0032】
次に、ハンドヘルドプリンタ101の使用状態について図9及び図10に基づいて説明する。
【0033】
図9は、ハンドヘルドプリンタ101の使用状態を示す模式図である。以下に説明するように、読取作業と貼付作業とに際して、ハンドヘルドプリンタ101の姿勢は一定のままで良い。
【0034】
まず、読取作業について説明する。作業員Uは、ラベルLBを貼付するべき被貼付物WKと対面する位置に移動する。そして、把持部104を把持する手の手首を大きく反らせたり捻ったりすることなく伸ばした状態で、ハウジング102のラベル排出面102bを被貼付物WKに対面させる。このとき、第1読取窓172を、被貼付物WKに付されている被貼付物情報としてのコードシンボル(図示せず)の正面位置に位置付ける。つまり、コードシンボルを第1スキャナ171の読取空間に位置付ける。コードシンボルは、被貼付物WKの配送先コードを記述している。このとき、前提として、スライドスイッチ192のスライド操作によって、第1スキャナ171が使用可能な状態にしておく。次に、把持部104を把持している手の指で、操作キー141をプッシュする。操作キー141のプッシュ操作によって、コードシンボルには、ラベル排出面102bに位置する第1読取窓172から読取光が照射される。そして、図7に基づいて説明したように、コードシンボルが記述している配送先コードが印字されたラベルLBがラベル排出口114から排出される。
【0035】
次に、貼付作業について説明する。読取作業を終えた作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKに対面させたまま、ラベル排出面102bを被貼付物WKに対して押し付ける。これにより、ラベル押え部152がラベル排出口114から排出されているラベルLBの印字面LBbを押え付けるので、ラベルLBの粘着面LBaが被貼付物WKに対して密着する。このとき、ライナレスラベルLLが使用されるハンドヘルドプリンタ101であれば、揺動体151が被貼付物WKからの押圧力によって揺動してラベル切断部153が案内経路161に侵入し、ミシン目LLaには切れ目が形成される。続けて、作業員Uは、ハンドヘルドプリンタ101を被貼付物WKの表面に沿って移動させる。このとき、ライナレスラベルLLが使用されるハンドヘルドプリンタ101であれば、被貼付物WKに接着しているラベルLBは切断される。そして、引き続き、ラベル押え部152をラベルLBの印字面LBbに沿って滑らせて、ラベルLBの粘着面LBaを被貼付物WKに対して貼り付ける。
【0036】
このように、読取作業と貼付作業とに際して、作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKと対面させたままでよい。このとき、ハウジング102の姿勢を変えるために把持部104を把持する手の手首を大きく反らせたり捻ったりするような手首にストレスがかかる不自然な動作は作業員Uには要求されない。そのため、作業員Uの身体負担の軽減を図ることができる。
【0037】
さらに、作業員Uは、把持部104を把持する手の手首を伸ばしてラベル排出面102bを被貼付物WKと対面させたまま読取作業と貼付作業とを行うことができることから、両作業の間に作業員Uが自身の体勢を変えたりハウジング102の向きを変えたりすることを要さない。そのため、作業員Uは、読取作業と貼付作業とを、断続的ではない一連の作業として行うことができる。
【0038】
したがって、ハンドヘルドプリンタ101によれば、読取作業と貼付作業とに際しての作業性を極めて良好なものにすることが期待できる。
【0039】
図10は、ハンドヘルドプリンタ101の使用状態の別の一例を示す模式図である。作業員Uは、自分の上背よりも高い位置の被貼付物WKに対して、読取作業と貼付作業とを行う場合がある。この場合、第1スキャナ171を使用してコードシンボルの読取作業を行おうとすると、第1読取窓172をコードシンボルに向けるために、把持部104を把持している手の手首を大きく反らせなくてはいけない。これは、作業員Uの身体への負担につながる。
【0040】
そこで、自分の上背よりも高い位置の被貼付物WKに対して読取作業を行う場合には、第2スキャナ181を使用すればよい。この場合、作業員Uは、スライドスイッチ192のスライド操作によって、第2スキャナ181が使用可能な状態にしておく。そして、作業員Uは、第2スキャナ181が使用可能な状態のハンドヘルドプリンタ101の把持部104を把持した状態で、ターゲットの被貼付物WKの下方位置に移動する。
【0041】
次に、作業員Uは、把持部104を把持している手の手首を伸ばした状態にして、把持部104の先端104fに位置する第2読取窓182を、被貼付物WKに付されているコードシンボルに向ける。つまり、コードシンボルを第2スキャナ181の読取空間に位置付ける。そして、把持部104を把持している手の指で、操作キー141をプッシュする。操作キー141のプッシュ操作によって、コードシンボルには、第2読取窓182から読取光が照射される。そして、図7に基づいて説明したように、コードシンボルが記述している配送先コードが印字されたラベルLBがラベル排出口114から排出される。
【0042】
その後の貼付作業では、把持部104を把持している手の手首を僅かに反らせながらハウジング102を上昇させて、ラベル排出面102bを被貼付物WKに対面させる。そして、図9に基づいて説明した貼付作業と同様に、ハウジング102を被貼付物WKに対して押し付けて、被貼付物WKに沿って引けばよい。
【0043】
このように、読取作業を行う作業員Uは、把持部104を把持している手の手首を伸ばしたままで良い。その後の貼付作業でも、作業員Uは、把持部104を把持している手の手首の向きを僅かに変えるだけでよい。つまり、把持部104を把持する手の手首にストレスがかかる不自然な動作は作業員Uには要求されない。そのため、作業員Uの身体負担の軽減を図ることができる。
【符号の説明】
【0044】
101…ハンドヘルドプリンタ
102…ハウジング
102b…ラベル排出面
104…把持部
112…プラテン(搬送機構)
113…サーマルヘッド(印字部)
114…ラベル排出口
117…CPU(制御部)
152…ラベル押え部
153…ラベル切断部
171…第1スキャナ(第1読取部)
172…第1読取窓
181…第2スキャナ(第2読取部)
182…第2読取窓
211…剥離部
LB…ラベル
LL…ライナレスラベル
BB…ラベル用紙
BS…剥離台紙
WK…被貼付物
【特許請求の範囲】
【請求項1】
ハウジングと、
前記ハウジング内でライナレスラベルを搬送する搬送機構と、
前記搬送機構が搬送するライナレスラベルに対して印字動作を行う印字部と、
ライナレスラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられて前記搬送機構が搬送するライナレスラベルを排出するラベル排出口と、
前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、
前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるライナレスラベルを被貼付物に押え付けるラベル押え部と、
前記ラベル押え部による押え付けに応じて、前記ラベル排出口から排出されるライナレスラベルに突き当たり切れ目を形成するラベル切断部と、
前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、
前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、
を備えるハンドヘルドプリンタ。
【請求項2】
ハウジングと、
前記ハウジング内でラベルが剥離台紙に貼付されたラベル用紙を搬送する搬送機構と、
前記搬送機構が搬送するラベル用紙に対して印字動作を行う印字部と、
ラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられてラベルが通過自在なラベル排出口と、
前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、
前記ラベル排出口に配置され、前記搬送機構が搬送するラベル用紙の剥離台紙からラベルを剥離させて前記ラベル排出口から排出させる剥離部と、
前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるラベルを被貼付物に押え付けるラベル押え部と、
前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、
前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、
を備えるハンドヘルドプリンタ。
【請求項3】
前記ハウジングの先端に位置する第2読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第2読取部を備え、
前記制御部は、前記第2読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する、
請求項1又は2記載のハンドヘルドプリンタ。
【請求項1】
ハウジングと、
前記ハウジング内でライナレスラベルを搬送する搬送機構と、
前記搬送機構が搬送するライナレスラベルに対して印字動作を行う印字部と、
ライナレスラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられて前記搬送機構が搬送するライナレスラベルを排出するラベル排出口と、
前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、
前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるライナレスラベルを被貼付物に押え付けるラベル押え部と、
前記ラベル押え部による押え付けに応じて、前記ラベル排出口から排出されるライナレスラベルに突き当たり切れ目を形成するラベル切断部と、
前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、
前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、
を備えるハンドヘルドプリンタ。
【請求項2】
ハウジングと、
前記ハウジング内でラベルが剥離台紙に貼付されたラベル用紙を搬送する搬送機構と、
前記搬送機構が搬送するラベル用紙に対して印字動作を行う印字部と、
ラベルが貼付される被貼付物に対面させるべき前記ハウジングの一面であるラベル排出面の先端側に設けられてラベルが通過自在なラベル排出口と、
前記ハウジングにおける前記ラベル排出面の反対側に位置する片手把持可能な把持部と、
前記ラベル排出口に配置され、前記搬送機構が搬送するラベル用紙の剥離台紙からラベルを剥離させて前記ラベル排出口から排出させる剥離部と、
前記ラベル排出面を被貼付物に押え付ける動作に応じて、前記ラベル排出口から排出されるラベルを被貼付物に押え付けるラベル押え部と、
前記ラベル排出面における前記ラベル排出口よりも後端側に位置する第1読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第1読取部と、
前記第1読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する制御部と、
を備えるハンドヘルドプリンタ。
【請求項3】
前記ハウジングの先端に位置する第2読取窓の前面に位置付けられた被貼付物に付されている被貼付物情報を読み取る第2読取部を備え、
前記制御部は、前記第2読取部が読み取った被貼付物情報を印字するように前記印字部を印字動作制御する、
請求項1又は2記載のハンドヘルドプリンタ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−194971(P2010−194971A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−44755(P2009−44755)
【出願日】平成21年2月26日(2009.2.26)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月26日(2009.2.26)
【出願人】(000003562)東芝テック株式会社 (5,631)
【Fターム(参考)】
[ Back to top ]