
ハンド走行リフター
【課題】ハンドルに設けた歪量に応じたモータの駆動を行うハンド走行リフターにおいて、後輪が浮き上がった際に、その浮き上がりを押さえ込むべくハンドルを押さえ込むと、ロードセルに歪が生じ、これにより前輪が駆動されると危険であるという問題がある。
【解決手段】後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【解決手段】後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハンド走行形態のリフターに関するもので、ハンドルの曲げ操作力をロードセルで検出して、前輪を駆動しながら走行するものである。
【背景技術】
【0002】
従来より、ハンド走行タイプのリフターには様々なものがあり、ハンドルの曲げ操作力をロードセルで検出し前輪を駆動させて走行することのできるものが特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−269903号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走行機体後方から操縦者がハンドルを握り、ハンドルを前後方向へ曲げ操作して、前輪を駆動させているハンド走行リフターは、ハンドルを前に押せば前進走行し、後に引けば後進走行が可能であり、又、ハンドルから手を離せば走行停止するよう制御されている。この操作方法で例えば制限以上の重量の荷物を持ち上げようとした場合や荷物の重心がリフトフォーク前端側へ片寄った状態で荷物を持ち上げた場合、又、前重心となっている状態の前進走行状態から停止した場合等に後部のキャスター輪が地面から浮き上がり、非接地状態になることが考えられるが、その安全策については未対応となっている。このキャスター輪浮き上がり時に操縦者は、リフターの転倒を防ぐべく、あわててハンドルを上方から押さえ込む動作を行うが、このハンドルの押さえ込み方向は斜め後方向となり、これは前輪を後進側へ駆動させるためのハンドル操作と同様の操作となることから、更にリフターが前方へ向け転倒するよう前輪が後進方向に駆動され、非常に危険であるという問題があった。
本発明は、後部のキャスター輪が浮き上がり、操縦者がハンドルを押さえ込んだ場合にも前輪が駆動されることのない安全なハンド走行リフターを提供することを課題とする。
【課題を解決するための手段】
【0005】
リフトフォーク1を昇降案内するリフトマスト2を立設した走行機体3の前部左右両側部に左右一対の駆動前輪4L,4Rを設け、該走行機体3の後側底部には操向自在の後輪6を設け、前記リフトマスト2の後方にはハンドル7を設け、操縦者が走行機体3の後方を歩行しながら、ハンドル7を握って前後方向へ曲げ操作することによる操作力を、ロードセル8L,8Rにより検出し、左右一対のモータ9L,9Rを介して前輪4L,4R各々を、正,逆転駆動、又は、操作力に応じた駆動回転をさせて走行することのできるハンド走行リフターにおいて、前記後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【0006】
又、後輪6の非接地状態、又は、非接地状態と同様の状態が所定時間T以上継続した場合に、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【発明の効果】
【0007】
請求項1に記載の発明は、走行機体3の後側底部に設けた後輪6が非接地面状態になった、又は、非接地状態と同様の状態となったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御しているので、過積載時や荷物重心がフォーク先端部にかかっているような不安定な状態の時後輪6が非接地状態に浮き上がり、それを押さえ込むようにハンドル7を操作した場合でも前輪4L,4Rが駆動されることはなく安全である。
【0008】
請求項2に記載の発明は、後輪6の非接地状態が所定時間T以上継続した場合には、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してあるので、走行中路面段差等により一瞬の間後輪6が非接地状態になったとしても、停止することなくその走行状態を継続することができ、安定した走行ができるとともに、所定時間T以上継続して後輪6が非接地状態となるような危険状態時にはハンドル7操作による前輪4L,4Rの駆動操作を確実に無効化できるものである。
【図面の簡単な説明】
【0009】
【図1】ハンド走行リフターの一部断側面図。
【図2】非接地検知手段の作動状態を示す断側面図。
【図3】走行操作のブロック図。
【図4】ハンド走行リフターの背面図。
【図5】ハンド走行リフターの側面図。
【図6】ハンド走行リフターの平面図。
【発明を実施するための形態】
【0010】
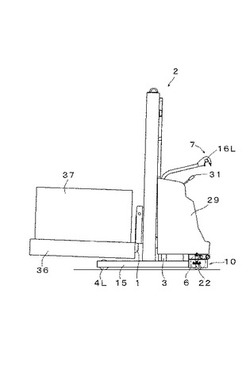
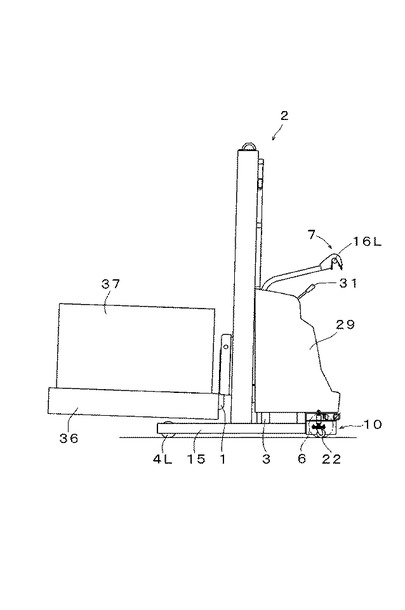
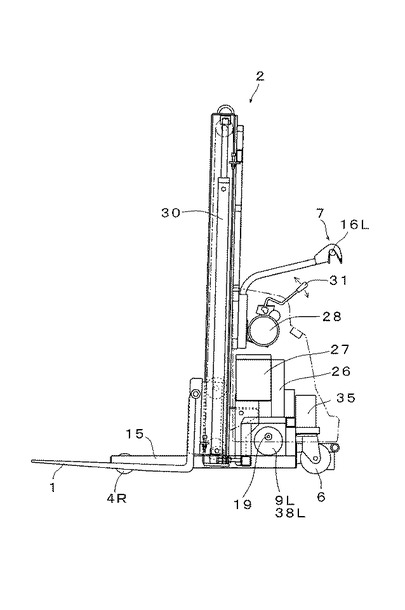
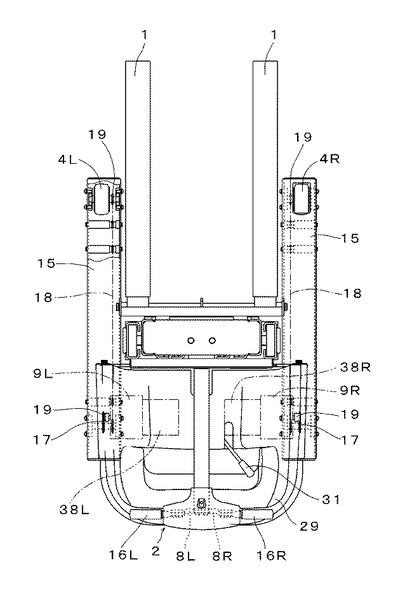
本発明のハンド走行リフターは、走行機体3から立設するリフトマスト2に沿って昇降案内されるリフトフォーク1が設けられており、該走行機体3の左右両端部から前方へ向け突出する走行フレーム15の前端部には走行駆動用の前輪4L,4Rを設け、走行機体3後底部には左右一対のキャスター輪6を設けてある。リフトマスト2後方の走行機体3上方には、操縦者が左右各々の手で把持操作可能の平面視T字形状のハンドル7を設け、このハンドル7の左右方向へ突出した把持部16L,16Rにはロードセル8L,8Rを設けてあり、左右各々のハンドル7を操縦者が把持し前後方向へ曲げ操作する操作力をロードセル8L,8Rが検出し、その操作力に応じて走行機体3に設けた左右一対のモータ9L,9Rを駆動させ、この駆動力を、チェーン17,18及びスプロケット19等を介して前輪4L,4Rをアシスト駆動できるよう構成してある。本実施の形態におけるハンド走行リフターは、走行フレーム15を前方へ突出させたリーチタイプを例に記載しているが、リーチタイプに限定するものではなく、前輪4L,4Rを側面視リフトマスト2の下方位置に設け、走行フレーム15を前方へ突出させることなくリフトフォーク1のみを前方へ突出させたカウンタータイプのリフターであってもよい。
【0011】
走行機体3には、前輪4L,4R駆動用のモータ9L,9R、コントローラ26、バッテリ27、充電器35,リフトフォーク1昇降用の油圧ポンプユニット28等が設けてあり、これらを機体カバー29で覆ってある。リフトマスト2中央部に設けた、シリンダ30はリフトフォーク1昇降用であり、油圧ポンプユニット28の昇降レバー31を操作することでリフトフォーク1を昇降操作することができる。機体カバー29の後上部にはバッテリ27残量や機体の異常等を表示させる表示パネル32、電源スイッチ33、非常停止ボタン34を設けてある。
【0012】
まず、本発明のハンドル走行リフターの通常操作について説明する。電源スイッチ33をONにし、機体後側に立つ操縦者が左右各々の把持部16L,16Rを両手で握り、この把持部16L,16Rを前後方向に曲げ操作すると、この操作力をロードセル8L,8Rが検出し、左右各々のモータ9L,9R及び前輪4L,4Rを駆動し走行することができる。この時、左右の前輪4L,4Rが同方向に回転すると直進走行でき、又、左右の前輪4L,4Rに回転差があると回転の低い側へ旋回する状態となる。更に、左右把持部16L,16Rを片方は前側へ、もう片方は後側へ向け操作した場合には、その場で旋回させることも可能である。このハンドル7操作により走行してリフトフォーク1をパレット36に差し込み、昇降レバー31を操作して荷物37を掬い上げて運搬することができる。ロードセル8L,8Rは、操作力に応じた出力でモータ9L,9R出力をコントロールすることが可能であり、大きな操作力をロードセル8L,8Rに加えるとモータ9L,9Rが高回転となり、前後への操作力を加えなければ停止するというアシスト駆動形態のリフターである。
【0013】
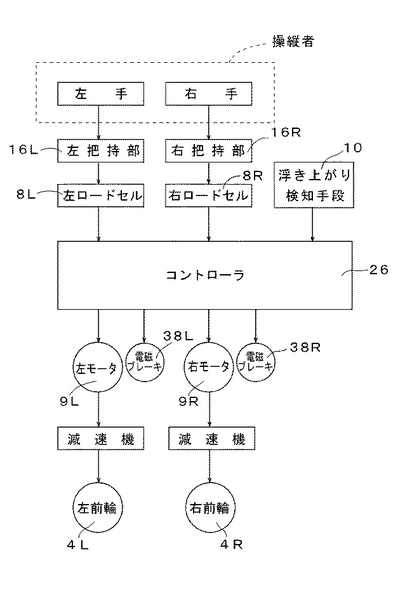
図3は、本発明を示す概略のブロック図であり、操縦者の左右各々の手の把持部16L,16Rへの曲げ操作力をロードセル8L,8Rが検出し、この検出値に応じた出力をコントローラ26がモータ9L,9Rへ出力する。モータ9L,9Rの回転駆動は減速機やチェン17,18、スプロケット19等を介して前輪4L,4Rへ伝動され、把持部16L,16Rへの曲げ操作力がなくなると、モータ9L,9Rに設けた電磁ブレーキ38L,38Rを作動させて停止する。
【0014】
左右一対の後輪6と後輪6との間には、該後輪6,6が非接地状態になり、浮き上がったこと、又は、後輪6が浮き上がった状態と同状態になったことを検知する非接地検知手段10を設けてある。ここにおいて、前記後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【0015】
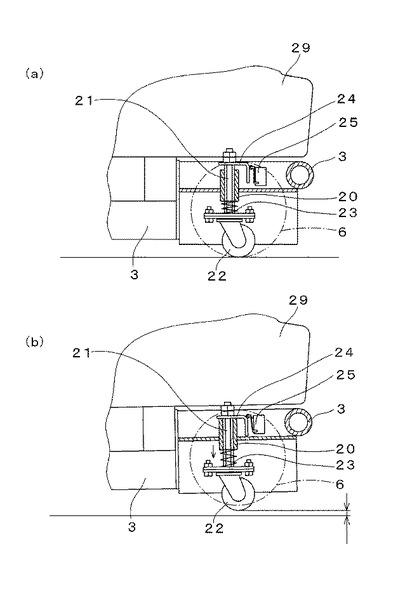
図は非接地検知手段10の一例を示すもので、図2(a)は、後輪6及び車輪22の両方が接地状態の時を示し、(b)は、両輪6,22の両方が非接地状態になった場合を示している。走行機体3側に設けたボス20内を挿嵌する軸21下方には、キャスター角を有する車輪22を設け、この車輪22と軸21とを圧縮スプリング23によって下方向へ付勢してある。ボス20には六角形状の穴が設けてあり、この穴に六角形状の軸21を挿嵌して、ボス20は軸21が上下方向にのみ移動することを許容してある。軸21上部にはリミットプレート24を設け、このリミットプレート24が上下移動することにより、ON,OFFするリミットスイッチ25を設けてある。この構成により、通常時に接地している後輪6が浮き上がった状態になった場合には、車輪22がスプリング23の付勢力によって軸21やリミットプレート24とともに下方へ移動し、リミットスイッチ25がOFF状態となる。このリミットスイッチ25のOFF信号はコントローラ26に入力され、ロードセル8L,8R操作を無効化し、ロードセル8L,8Rが歪を検出しても、モータ9L,9Rは、駆動されない。従って、後輪6が浮き上がり非接地状態になった際に、操縦者があわててその浮き上がりを押えるようハンドル7を押さえ込み、ロードセル8L,8Rに歪が発生したとしても、その歪によるモータ9L,9Rへの駆動信号は出力されず、前輪4L,4Rは駆動回転されないので安全である。尚、図例の非接地検出手段10は後輪6が浮き上がったこと自体を検知しているのではなく、後輪6が浮き上がった状態と同様の状態になったことを検知するものであるが、後輪6自体に非接地検出手段10を設けることも可能である。
【0016】
この非接地検知手段10が一度作動すると、後輪6の非接地状態が解除されるまでモータ9L,9Rの駆動は無効となっており、後輪6が接地状態になり、転倒等の危険性がなくなった安全な状態になれば通常の走行が可能となる。従って、荷物を掬い取った後、リフトフォーク1を少しだけ上昇させた状態の時に、前進走行中からの急停止や荷物重心がリフトフォーク1前端側にあった時等に後輪6が浮き上がり、リフトフォーク1や荷物37前端部が接地した状態となり、後輪6が浮き上がったままの状態となった場合にも、把持部16L,16Rを操作してもその操作は無効となって前輪4L,4Rは、駆動されない。この時には、昇降レバー31を操作してリフトフォーク1を下降させて非接地検知手段10の作動を解除してやれば、通常の走行操作を行えるようになる。
【0017】
平坦路面走行中であっても、路面の少しの段差や凸凹により、非接地検知手段10が作動してしまうことがあり、転倒等の危険性の全くない状態の時や操縦者が全く意識していない状態の時に走行中の機体が停止してしまうこととなり、これは大変わずらわしいことから、本発明のハンド走行リフターにはタイマー(図示せず)を設け、後輪6が浮き上がるか、又は、浮き上がった状態と同様の状態が所定時間T以上継続した場合に把持部16L,16Rの操作無効化を行うように制御してある。これにより、転倒等の危険性のある状態で後輪6が浮き上がった場合には、ハンドル7操作による前輪4L,4R駆動を確実に無効化するとともに、転倒等の危険性のない状態で少しの段差や路面凸凹により非接地検知手段10が作動することがなく、スムーズな運搬作業が継続できる。
【符号の説明】
【0018】
1 リフトフォーク
2 リフトマスト
3 走行機体
4L 前輪
4R 前輪
6 後輪
7 ハンドル
8L ロードセル
8R ロードセル
9L モータ
9R モータ
10 非接地検知手段
T 所定時間
【技術分野】
【0001】
本発明は、ハンド走行形態のリフターに関するもので、ハンドルの曲げ操作力をロードセルで検出して、前輪を駆動しながら走行するものである。
【背景技術】
【0002】
従来より、ハンド走行タイプのリフターには様々なものがあり、ハンドルの曲げ操作力をロードセルで検出し前輪を駆動させて走行することのできるものが特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−269903号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走行機体後方から操縦者がハンドルを握り、ハンドルを前後方向へ曲げ操作して、前輪を駆動させているハンド走行リフターは、ハンドルを前に押せば前進走行し、後に引けば後進走行が可能であり、又、ハンドルから手を離せば走行停止するよう制御されている。この操作方法で例えば制限以上の重量の荷物を持ち上げようとした場合や荷物の重心がリフトフォーク前端側へ片寄った状態で荷物を持ち上げた場合、又、前重心となっている状態の前進走行状態から停止した場合等に後部のキャスター輪が地面から浮き上がり、非接地状態になることが考えられるが、その安全策については未対応となっている。このキャスター輪浮き上がり時に操縦者は、リフターの転倒を防ぐべく、あわててハンドルを上方から押さえ込む動作を行うが、このハンドルの押さえ込み方向は斜め後方向となり、これは前輪を後進側へ駆動させるためのハンドル操作と同様の操作となることから、更にリフターが前方へ向け転倒するよう前輪が後進方向に駆動され、非常に危険であるという問題があった。
本発明は、後部のキャスター輪が浮き上がり、操縦者がハンドルを押さえ込んだ場合にも前輪が駆動されることのない安全なハンド走行リフターを提供することを課題とする。
【課題を解決するための手段】
【0005】
リフトフォーク1を昇降案内するリフトマスト2を立設した走行機体3の前部左右両側部に左右一対の駆動前輪4L,4Rを設け、該走行機体3の後側底部には操向自在の後輪6を設け、前記リフトマスト2の後方にはハンドル7を設け、操縦者が走行機体3の後方を歩行しながら、ハンドル7を握って前後方向へ曲げ操作することによる操作力を、ロードセル8L,8Rにより検出し、左右一対のモータ9L,9Rを介して前輪4L,4R各々を、正,逆転駆動、又は、操作力に応じた駆動回転をさせて走行することのできるハンド走行リフターにおいて、前記後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【0006】
又、後輪6の非接地状態、又は、非接地状態と同様の状態が所定時間T以上継続した場合に、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【発明の効果】
【0007】
請求項1に記載の発明は、走行機体3の後側底部に設けた後輪6が非接地面状態になった、又は、非接地状態と同様の状態となったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御しているので、過積載時や荷物重心がフォーク先端部にかかっているような不安定な状態の時後輪6が非接地状態に浮き上がり、それを押さえ込むようにハンドル7を操作した場合でも前輪4L,4Rが駆動されることはなく安全である。
【0008】
請求項2に記載の発明は、後輪6の非接地状態が所定時間T以上継続した場合には、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してあるので、走行中路面段差等により一瞬の間後輪6が非接地状態になったとしても、停止することなくその走行状態を継続することができ、安定した走行ができるとともに、所定時間T以上継続して後輪6が非接地状態となるような危険状態時にはハンドル7操作による前輪4L,4Rの駆動操作を確実に無効化できるものである。
【図面の簡単な説明】
【0009】
【図1】ハンド走行リフターの一部断側面図。
【図2】非接地検知手段の作動状態を示す断側面図。
【図3】走行操作のブロック図。
【図4】ハンド走行リフターの背面図。
【図5】ハンド走行リフターの側面図。
【図6】ハンド走行リフターの平面図。
【発明を実施するための形態】
【0010】
本発明のハンド走行リフターは、走行機体3から立設するリフトマスト2に沿って昇降案内されるリフトフォーク1が設けられており、該走行機体3の左右両端部から前方へ向け突出する走行フレーム15の前端部には走行駆動用の前輪4L,4Rを設け、走行機体3後底部には左右一対のキャスター輪6を設けてある。リフトマスト2後方の走行機体3上方には、操縦者が左右各々の手で把持操作可能の平面視T字形状のハンドル7を設け、このハンドル7の左右方向へ突出した把持部16L,16Rにはロードセル8L,8Rを設けてあり、左右各々のハンドル7を操縦者が把持し前後方向へ曲げ操作する操作力をロードセル8L,8Rが検出し、その操作力に応じて走行機体3に設けた左右一対のモータ9L,9Rを駆動させ、この駆動力を、チェーン17,18及びスプロケット19等を介して前輪4L,4Rをアシスト駆動できるよう構成してある。本実施の形態におけるハンド走行リフターは、走行フレーム15を前方へ突出させたリーチタイプを例に記載しているが、リーチタイプに限定するものではなく、前輪4L,4Rを側面視リフトマスト2の下方位置に設け、走行フレーム15を前方へ突出させることなくリフトフォーク1のみを前方へ突出させたカウンタータイプのリフターであってもよい。
【0011】
走行機体3には、前輪4L,4R駆動用のモータ9L,9R、コントローラ26、バッテリ27、充電器35,リフトフォーク1昇降用の油圧ポンプユニット28等が設けてあり、これらを機体カバー29で覆ってある。リフトマスト2中央部に設けた、シリンダ30はリフトフォーク1昇降用であり、油圧ポンプユニット28の昇降レバー31を操作することでリフトフォーク1を昇降操作することができる。機体カバー29の後上部にはバッテリ27残量や機体の異常等を表示させる表示パネル32、電源スイッチ33、非常停止ボタン34を設けてある。
【0012】
まず、本発明のハンドル走行リフターの通常操作について説明する。電源スイッチ33をONにし、機体後側に立つ操縦者が左右各々の把持部16L,16Rを両手で握り、この把持部16L,16Rを前後方向に曲げ操作すると、この操作力をロードセル8L,8Rが検出し、左右各々のモータ9L,9R及び前輪4L,4Rを駆動し走行することができる。この時、左右の前輪4L,4Rが同方向に回転すると直進走行でき、又、左右の前輪4L,4Rに回転差があると回転の低い側へ旋回する状態となる。更に、左右把持部16L,16Rを片方は前側へ、もう片方は後側へ向け操作した場合には、その場で旋回させることも可能である。このハンドル7操作により走行してリフトフォーク1をパレット36に差し込み、昇降レバー31を操作して荷物37を掬い上げて運搬することができる。ロードセル8L,8Rは、操作力に応じた出力でモータ9L,9R出力をコントロールすることが可能であり、大きな操作力をロードセル8L,8Rに加えるとモータ9L,9Rが高回転となり、前後への操作力を加えなければ停止するというアシスト駆動形態のリフターである。
【0013】
図3は、本発明を示す概略のブロック図であり、操縦者の左右各々の手の把持部16L,16Rへの曲げ操作力をロードセル8L,8Rが検出し、この検出値に応じた出力をコントローラ26がモータ9L,9Rへ出力する。モータ9L,9Rの回転駆動は減速機やチェン17,18、スプロケット19等を介して前輪4L,4Rへ伝動され、把持部16L,16Rへの曲げ操作力がなくなると、モータ9L,9Rに設けた電磁ブレーキ38L,38Rを作動させて停止する。
【0014】
左右一対の後輪6と後輪6との間には、該後輪6,6が非接地状態になり、浮き上がったこと、又は、後輪6が浮き上がった状態と同状態になったことを検知する非接地検知手段10を設けてある。ここにおいて、前記後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L,4R駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
【0015】
図は非接地検知手段10の一例を示すもので、図2(a)は、後輪6及び車輪22の両方が接地状態の時を示し、(b)は、両輪6,22の両方が非接地状態になった場合を示している。走行機体3側に設けたボス20内を挿嵌する軸21下方には、キャスター角を有する車輪22を設け、この車輪22と軸21とを圧縮スプリング23によって下方向へ付勢してある。ボス20には六角形状の穴が設けてあり、この穴に六角形状の軸21を挿嵌して、ボス20は軸21が上下方向にのみ移動することを許容してある。軸21上部にはリミットプレート24を設け、このリミットプレート24が上下移動することにより、ON,OFFするリミットスイッチ25を設けてある。この構成により、通常時に接地している後輪6が浮き上がった状態になった場合には、車輪22がスプリング23の付勢力によって軸21やリミットプレート24とともに下方へ移動し、リミットスイッチ25がOFF状態となる。このリミットスイッチ25のOFF信号はコントローラ26に入力され、ロードセル8L,8R操作を無効化し、ロードセル8L,8Rが歪を検出しても、モータ9L,9Rは、駆動されない。従って、後輪6が浮き上がり非接地状態になった際に、操縦者があわててその浮き上がりを押えるようハンドル7を押さえ込み、ロードセル8L,8Rに歪が発生したとしても、その歪によるモータ9L,9Rへの駆動信号は出力されず、前輪4L,4Rは駆動回転されないので安全である。尚、図例の非接地検出手段10は後輪6が浮き上がったこと自体を検知しているのではなく、後輪6が浮き上がった状態と同様の状態になったことを検知するものであるが、後輪6自体に非接地検出手段10を設けることも可能である。
【0016】
この非接地検知手段10が一度作動すると、後輪6の非接地状態が解除されるまでモータ9L,9Rの駆動は無効となっており、後輪6が接地状態になり、転倒等の危険性がなくなった安全な状態になれば通常の走行が可能となる。従って、荷物を掬い取った後、リフトフォーク1を少しだけ上昇させた状態の時に、前進走行中からの急停止や荷物重心がリフトフォーク1前端側にあった時等に後輪6が浮き上がり、リフトフォーク1や荷物37前端部が接地した状態となり、後輪6が浮き上がったままの状態となった場合にも、把持部16L,16Rを操作してもその操作は無効となって前輪4L,4Rは、駆動されない。この時には、昇降レバー31を操作してリフトフォーク1を下降させて非接地検知手段10の作動を解除してやれば、通常の走行操作を行えるようになる。
【0017】
平坦路面走行中であっても、路面の少しの段差や凸凹により、非接地検知手段10が作動してしまうことがあり、転倒等の危険性の全くない状態の時や操縦者が全く意識していない状態の時に走行中の機体が停止してしまうこととなり、これは大変わずらわしいことから、本発明のハンド走行リフターにはタイマー(図示せず)を設け、後輪6が浮き上がるか、又は、浮き上がった状態と同様の状態が所定時間T以上継続した場合に把持部16L,16Rの操作無効化を行うように制御してある。これにより、転倒等の危険性のある状態で後輪6が浮き上がった場合には、ハンドル7操作による前輪4L,4R駆動を確実に無効化するとともに、転倒等の危険性のない状態で少しの段差や路面凸凹により非接地検知手段10が作動することがなく、スムーズな運搬作業が継続できる。
【符号の説明】
【0018】
1 リフトフォーク
2 リフトマスト
3 走行機体
4L 前輪
4R 前輪
6 後輪
7 ハンドル
8L ロードセル
8R ロードセル
9L モータ
9R モータ
10 非接地検知手段
T 所定時間
【特許請求の範囲】
【請求項1】
リフトフォーク(1)を昇降案内するリフトマスト(2)を立設した走行機体(3)の前部左右両側部に左右一対の駆動前輪(4L),(4R)を設け、該走行機体(3)の後側底部には操向自在の後輪(6)を設け、前記リフトマスト(2)の後方にはハンドル(7)を設け、操縦者が走行機体(3)の後方を歩行しながら、ハンドル(7)を握って前後方向へ曲げ操作することによる操作力を、ロードセル(8L),(8R)により検出し、左右一対のモータ(9L),(9R)を介して前輪(4L),(4R)各々を、正,逆転駆動、又は、操作力に応じた駆動回転をさせて走行することのできるハンド走行リフターにおいて、前記後輪(6)が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段(10)を設け、この非接地検知手段(10)が作動した際は、ハンドル(7)操作による前輪(4L),(4R)駆動操作を無効化させるよう制御してなるハンド走行リフター。
【請求項2】
後輪(6)の非接地状態、又は、非接地状態と同様の状態が所定時間(T)以上継続した場合に、ハンドル(7)操作による前輪(4L),(4R)駆動操作を無効化させるよう制御してなる請求項1記載のハンド走行リフター。
【請求項1】
リフトフォーク(1)を昇降案内するリフトマスト(2)を立設した走行機体(3)の前部左右両側部に左右一対の駆動前輪(4L),(4R)を設け、該走行機体(3)の後側底部には操向自在の後輪(6)を設け、前記リフトマスト(2)の後方にはハンドル(7)を設け、操縦者が走行機体(3)の後方を歩行しながら、ハンドル(7)を握って前後方向へ曲げ操作することによる操作力を、ロードセル(8L),(8R)により検出し、左右一対のモータ(9L),(9R)を介して前輪(4L),(4R)各々を、正,逆転駆動、又は、操作力に応じた駆動回転をさせて走行することのできるハンド走行リフターにおいて、前記後輪(6)が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段(10)を設け、この非接地検知手段(10)が作動した際は、ハンドル(7)操作による前輪(4L),(4R)駆動操作を無効化させるよう制御してなるハンド走行リフター。
【請求項2】
後輪(6)の非接地状態、又は、非接地状態と同様の状態が所定時間(T)以上継続した場合に、ハンドル(7)操作による前輪(4L),(4R)駆動操作を無効化させるよう制御してなる請求項1記載のハンド走行リフター。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−18610(P2013−18610A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−153495(P2011−153495)
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000144980)株式会社アテックス (111)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000144980)株式会社アテックス (111)
【Fターム(参考)】
[ Back to top ]