
ハードディスクシステムおよびプログラム
【課題】 位置情報を受信できない場合であっても、確実にハードディスクの作動停止を行うことができる技術を提供する。
【解決手段】 車載装置1は、車両の現在位置を検出する位置検出装置21と、ハードディスクドライブ22と、地図表示画像などの各種画像表示を行う表示装置23と、ガイド音声等の音声情報を出力する音声出力装置24と、ユーザからの各種指示を入力するための操作スイッチ群25と、不揮発性メモリ26と、制御装置27と、を備えている。
GPS情報が受信できない現在地精度低と判定されたときは、移動予測範囲を設定し、その範囲が高高度エリアと一部でも重複している場合に、ハードディスクドライブ22の作動を停止する。
【解決手段】 車載装置1は、車両の現在位置を検出する位置検出装置21と、ハードディスクドライブ22と、地図表示画像などの各種画像表示を行う表示装置23と、ガイド音声等の音声情報を出力する音声出力装置24と、ユーザからの各種指示を入力するための操作スイッチ群25と、不揮発性メモリ26と、制御装置27と、を備えている。
GPS情報が受信できない現在地精度低と判定されたときは、移動予測範囲を設定し、その範囲が高高度エリアと一部でも重複している場合に、ハードディスクドライブ22の作動を停止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハードディスクドライブと、ハードディスクドライブを制御する制御手段とを備え、車両に搭載されるハードディスクシステムおよびプログラムに関する。
【背景技術】
【0002】
近年、地図データに基づいて現在位置周辺の地図をディスプレイに表示したり、目的地までの最適な経路を計算して走行案内を行う車載用ナビゲーション装置において、地図データ等を記憶するための記憶媒体としてハードディスクドライブを用いたものが広く普及している。
【0003】
ハードディスクドライブは、磁性体を塗布した記憶媒体であるディスクに磁気ヘッドを用いてデータを読み書きする記憶装置である。このハードディスクドライブは、作動時において、ディスクの回転により発生する空気の粘性による圧力によって、ディスク上方に位置する磁気ヘッドがディスクから極わずかだけ浮き上がる構造となっている。
【0004】
そのため、周辺の気圧が著しく低下している環境下でハードディスクドライブが作動すると、磁気ヘッドを浮上させる空気圧の低下によりディスクと磁気ヘッドとの間隔を適正な状態に維持できなくなる。その結果、ディスクと磁気ヘッドが衝突することでディスクを損傷してしまう虞がある。
【0005】
気圧は高度が上昇するにつれて低下するため、ハードディスクドライブには高度による使用限界がある。一般的には、ハードディスクドライブの高度に対する動作保証は、高度3000m(約0.7気圧)〜5000m(約0.5気圧)程度となっている。
【0006】
したがって、ハードディスクドライブを搭載した車載用ナビゲーション装置においては、ハードディスクドライブの作動が保証されている高度を超えるような高高地(例えば、3000m級、あるいは4000〜5000m級の道路)での使用が想定される場合、ハードディスクドライブの破損を防止するための対策が必要となる。
【0007】
そこで、従来、車両が所定の高度(例えば3000m)以上に到達したときに、ハードディスクドライブに記憶されている地図データの一部を外部メモリに記憶した後、ハードディスクドライブを停止し、3000m以上の高高地を走行中には外部メモリに記憶されている地図データに基づいて経路案内を行う技術が案出されている(例えば、特許文献1参照)。このような技術により、高高地においてハードディスクドライブを停止させることでハードディスクドライブの破損を防止しながらも、経路案内を継続可能にすることを実現している。
【特許文献1】特開2004−317385号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
車両が所定の高度に到達したことを検出するために、受信装置がGPS情報などの位置情報を受信して現在位置を測定し、高度情報を含む地図データと照合することで、車両が所定の高度に到達したか否かをチェックする構成が一般的である。しかしながら、そのような構成では、トンネルや谷間の道路を走行する場合や、高層建築物などの付近を走行する場合など、なんらかの理由で電波が遮蔽されてGPS情報などの位置情報が受信できない場合、車両の現在位置を測定できない。その場合、車両が所定の高度に到達したことをチェックできず、ハードディスクドライブを停止させることができずに、ハードディスクドライブを破損させる虞がある。
【0009】
本発明は、上記の問題を解決するためになされており、位置情報を受信できない場合であっても、確実にハードディスクの作動停止を行うことができるハードディスクシステムおよびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した問題を解決するためになされた請求項1に記載のハードディスクシステムは、車両外部の送信装置から位置情報を受信可能な場合に現在地精度高と判定し、前記位置情報を受信不能な場合に現在地精度低と判定する。
【0011】
現在地精度高と判定している場合には、少なくとも位置情報に基づいて特定された車両の位置が、予め設定した高高度エリアに位置するときに高高度走行状態と判定し、高高度エリアに位置しないときに非高高度走行状態と判定する。
【0012】
ここでいう高高度エリアとは、例えば、例えばハードディスクドライブの作動が保証されている高度の上限を超えた高度のエリアとすることが考えられる。高高度走行状態とは、上記エリアを車両が走行している状態であり、非高高度走行状態とは、上記エリアの範囲外を車両が走行している状態である。
【0013】
また、現在地精度低と判定している場合には、車両の移動予測範囲を設定し、その設定された移動予測範囲に含まれる領域と高高度エリアとの位置関係に応じて、高高度走行状態および非高高度走行状態のいずれであるかを判定する。
【0014】
ここでいう移動予測範囲とは、最後に位置情報を受信した時点から車両が走行した距離と、車両の進行方向および速度から推定される車両の位置と、に基づいて設定される範囲であって、車両の位置を推定する際に生じ得る誤差を含む範囲である。
【0015】
そして、高高度走行状態と判定している場合には、ハードディスクドライブの作動を停止するよう構成されている。
このように構成されたハードディスクシステムは、車両外部からの位置情報を受信できない場合、車両の移動予測範囲を基準として車両が高高度エリアを走行しているか否かを判定し、高高度エリアを走行していると判定された場合にはハードディスクドライブの作動を停止する。
【0016】
上述した移動予測範囲は、車両の位置を推定する際に生じ得る誤差を含む範囲であるため、実際には高高度エリアを走行しているにもかかわらず、車両位置の推定誤差のために高高度エリアを走行していないと判定される虞がない。よって、位置情報を受信できない場合であっても、確実にハードディスクの作動停止を行うことができる。その結果、作動可能な気圧の下限以下での作動によるハードディスクドライブの故障を防止できる。
【0017】
上述したハードディスクシステムは、請求項2に記載したように、ハードディスクドライブの作動を停止した状態において、非高高度走行状態と判定した以降に、ハードディスクドライブの作動を開始するように構成してもよい。
【0018】
このように構成されたハードディスクシステムであれば、車両が高高度エリアに進入したときにハードディスクドライブの作動を停止させ、車両が高高度エリアを離脱した後にハードディスクドライブの作動を再開させることができるので、車両が高高度エリアを走行している期間のみハードディスクドライブの作動を停止させることが可能となる。
【0019】
さらに、車両外部からの位置情報を受信できない場合には、車両の移動予測範囲を基準として車両が高高度エリアを走行しているか否かを判定するため、実際は高高度エリアを走行しているにもかかわらず高高度エリアを離脱したと判定され、ハードディスクドライブを作動させてしまうことを防止できる。
【0020】
なお、ハードディスクドライブの作動を再開するタイミングは、非高高度走行状態と判定された直後であってもよいが、非高高度走行状態と判定された状態で所定の距離を走行したタイミング,または,非高高度走行状態と判定された状態で所定の時間経過したタイミングであってもよい。このようにすることで、高高度エリアと高高度エリア以外との境界線付近を走行して頻繁に高高度走行状態と非高高度走行状態とが入れ替わるような状態において、ハードディスクドライブが作動停止と作動開始を頻繁に繰り返すことを防止できる。
【0021】
ところで、高高度走行状態か非高高度走行状態かを判定する基準となる移動予測範囲と高高度エリアとの具体的な位置関係は特に限定されない。例えば、移動予測範囲が高高度エリアに少しでも重なった場合に高高度走行状態と判定することとしてもよい。そのためには、請求項3に記載したように、現在地精度低と判定している場合には、設定された移動予測範囲に含まれる領域と、高高度エリアと、に重なる領域が存在する位置関係のときに高高度走行状態と判定し、重なる領域が存在しない位置関係のときに非高高度走行状態と判定するように構成するとよい。
【0022】
このように構成されたハードディスクシステムであれば、移動予測範囲が高高度エリアに重なったときに高高度走行状態と判定するので、車両が高高度エリアに進入する前に確実にハードディスクドライブの作動を停止させることができる。
【0023】
また、上述したハードディスクシステムは、請求項4に記載したように、車両の進行方向および速度から推定される車両の位置を中心とし、最後に位置情報を受信した時点から車両が走行した距離に応じた範囲を移動予測範囲として設定するように構成されている。
【0024】
車両の位置を推定する際に生じ得る位置の誤差は、車両の走行した距離が大きくなるにつれて大きくなり得るが、このように構成されたハードディスクシステムであれば、実際の車両の位置を、より確実に移動予測範囲に含めることができるため、車両が高高度走行状態であるという判定を、安全側に余裕をもって行うことができる。
【0025】
また、上述したハードディスクシステムは、高高度走行状態か非高高度走行状態かを判定する方法が、位置情報が受信可能な現在地精度高の場合と、位置情報が受信不能な現在地精度低の場合とで異なる。受信可能な場合と受信不能な場合とを決定する具体的な基準は特に限定されないが、例えば、請求項5に記載したように定めてもよい。それは、受信可能な場合とは、位置情報を最後に受信してから所定の時間を経過していない場合であり、受信不能な場合とは、位置情報を最後に受信してから所定の時間を経過した場合であるとする基準である。
【0026】
このように構成されたハードディスクシステムは、位置情報を所定の時間受信できない場合に、移動予測範囲の設定を開始するため、常時移動予測範囲を設定する処理を行う必要がなく、ハードディスクシステムの処理負担を軽減することができる。
【0027】
また、上記位置情報とは、請求項6に記載したように、GPS情報であってもよい。
このように構成されたハードディスクシステムは、GPS情報によって車両の位置を特定することができる。
【0028】
また、請求項7に記載のプログラムは、請求項1から請求項6のいずれかに記載の制御手段として機能させるための処理手順を、コンピュータシステムに実行させるためのプログラムである。
【0029】
このようなプログラムにより制御されるコンピュータシステムは、請求項1から請求項6のいずれかに記載のハードディスクシステムの一部を構成することができる。
なお、上述した各プログラムは、コンピュータシステムによる処理に適した命令の順番付けられた列からなるものであって、各種記録媒体や通信回線を介して画像処理装置や、これを利用するユーザに提供されるものである。
【発明を実施するための最良の形態】
【0030】
以下に本発明の実施形態を図面と共に説明する。
(1)全体構成
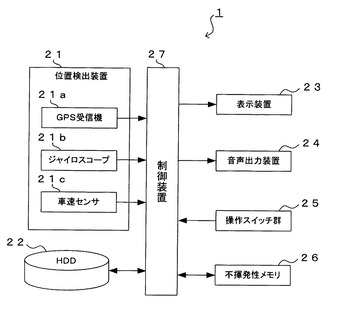
車載装置1は、ナビゲーションシステムの機能を有する装置であって、図1に示すように、車両の現在位置を検出する位置検出装置21と、ハードディスクドライブ(HDD)22と、地図表示画像などの各種画像表示を行う表示装置23と、ガイド音声等の音声情報を出力する音声出力装置24と、ユーザからの各種指示を入力するための操作スイッチ群25と、不揮発性メモリ26と、制御装置27と、を備えている。
【0031】
位置検出装置21は、GPS用の人工衛星からのGPS情報をGPSアンテナを介して受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の速度に応じた検出信号を出力する車速センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0032】
なお、GPS受信機21aがGPS情報を受信できない場合には、ジャイロスコープ21bが出力する検出信号と、車速センサ21cが出力する検出信号と、に基づいて、最後にGPS情報を受信した地点からの走行軌道を算出し、車両の現在位置を推定する。
【0033】
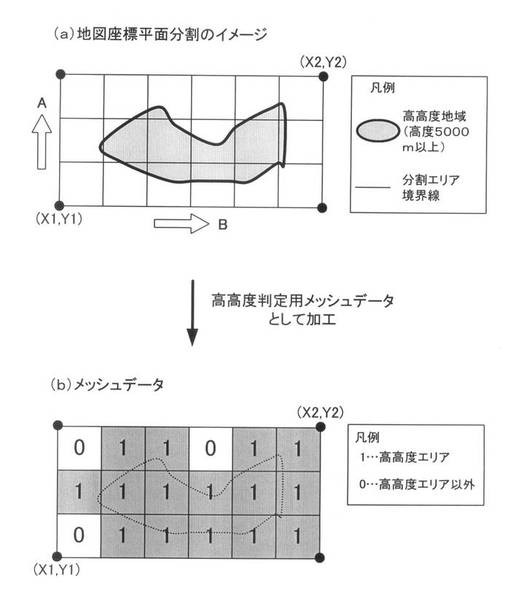
ハードディスクドライブ22は、情報を記憶するハードディスクと、ハードディスクに対して情報を読み書きするための磁気ヘッド,駆動部,コントローラ等からなるドライブと、が一体となった記憶装置である。上述したハードディスクには、データを記憶する記憶領域として、車載装置1を作動させるためのアプリケーションプログラム用の記憶領域,地図情報を示す地図データ用の記憶領域,その他各種データを記憶するための記憶領域など有している。このハードディスクドライブ22に記憶されている地図データには、ナビゲーション機能を実現するために必要な道路データや描画データに加えて、高高度エリアを判定するためのメッシュデータなどが含まれる。
【0034】
上述したメッシュデータとは、以下のように作成されたものである。まず、図2(a)に示すように、地図の座標平面を緯度方向Aおよび経度方向Bに分割したメッシュ状に区切る。そして、図2(b)に示すように、各メッシュに対応するエリアごとに高高度エリアであるか高高度エリア以外であるかを設定したデータをメッシュデータとする。このメッシュデータは、高高度地域(高度5000m以上)が含まれるメッシュを高高度エリアとして設定し、高高度地域が全く含まれない地域を高高度エリア以外として設定している。
【0035】
表示装置23は、液晶ディスプレイ等の表示面を有するカラー表示装置であって、制御装置27からの映像信号の入力に応じて各種画像を表示面に表示する。例えば、車両の走行中においては、ナビゲーション表示画面として、ハードディスクドライブ22から読み出した地図データに示される地図上に、位置検出装置21にて検出した車両の現在位置を示すマーク,名称,目印,各種ランドマークのシンボル等のデータ,目的地までの誘導経路などを重ねた画面が表示される。
【0036】
音声出力装置24は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示装置23による表示と音声出力装置24からの音声出力との両方でユーザに対してルート案内等の各種案内をすることができる。
【0037】
操作スイッチ群25は、表示装置23と一体に構成され、表示装置表示面上に設置されるタッチパネルや、表示装置23の周囲に設けられたメカニカルなキースイッチなどからなる。
【0038】
不揮発性メモリ26は、ハードディスクドライブ22に記憶されているアプリケーションプログラムの一部や上述したメッシュデータを記憶しており、ハードディスクドライブ22の作動が停止した場合には、この不揮発性メモリ26に記憶されているデータに基づいて、必要な処理が行えるようになっている。
【0039】
制御装置27は、CPU,ROM,RAM,I/O,およびこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した車載装置1全体を制御する。また、この制御装置27は、上記ROM,ハードディスクドライブ22,不揮発性メモリ26などから読み込んだアプリケーションプログラムや各種データに従って、ナビゲーション関係の処理や、後述するハードディスクドライブ作動切り替え処理などを実行する。
【0040】
ナビゲーション関係の処理としては、例えば、地図表示処理や経路案内処理等が挙げられる。地図表示処理は、位置検出装置21からの各検出信号に基づいて車両の現在位置を算出し、ハードディスクドライブ22に記憶された地図データに基づいて現在位置付近の地図等を表示装置23に表示する処理である。また、経路案内処理は、ハードディスクドライブ22に記憶された地図データに基づいて、現在位置から、ユーザによる操作スイッチ群25の操作によって設定された目的地までの最適な経路である目的地経路を算出し、現在位置と目的地経路との関係を考慮して目的までの走行案内を行う処理である。このように自動的に最適な経路を設定する手法として、ダイクストラ法によるコスト計算等の手法が知られている。
(2)ハードディスクドライブ作動切り替え処理
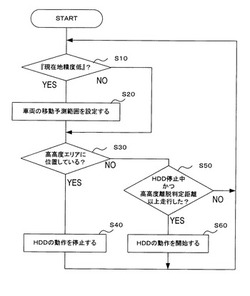
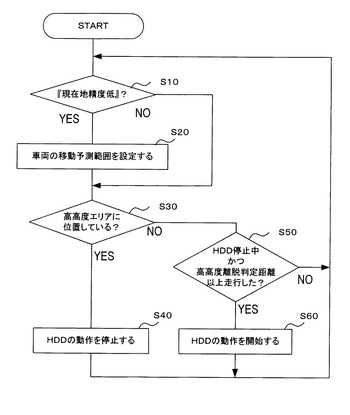
以下に、制御装置27によるハードディスクドライブ作動切り替え処理の処理手順を、図3に基づいて説明する。
【0041】
このハードディスクドライブ作動切り替え処理は、車両のアクセサリスイッチがオンにされることによる車載装置1の起動に伴ってハードディスクドライブ22が作動を開始した後、直ちに開始され、上述した地図表示処理や経路案内処理などと並行して実行される。
【0042】
このハードディスクドライブ作動切り替え処理では、まず、GPS情報の受信状況に基づいて、『現在地精度低』であるか否かをチェックする(S10)。ここでは、GPS情報を受信してから、予め定められた未測位継続時間(本実施例においては5分)を経過していない場合に『現在地精度高』と判定し、未測位継続時間を経過している場合に『現在地精度低』と判定する。
【0043】
判定の結果、『現在地精度低』であれば(S10:YES)、処理がS20へ移行する。一方、『現在地精度高』であれば(S10:NO)、処理がS30へ移行する。
なお、未測位継続時間は、高層建築物,トンネル,谷などの車両環境によって一時的にGPS情報が受信できなくなった場合に、即座に現在地精度高から現在地精度低に切り替わることが無いように、適切な時間に設定される。
【0044】
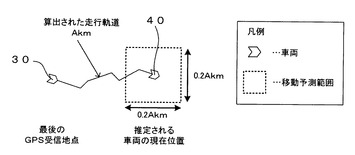
上述したS10にて『現在地精度低』と判定されたときは、車両の移動予測範囲を設定する(S20)。車両の移動予測範囲は、次のように設定する。まず、図4に示すように、最後にGPS情報を受信した地点を基準地点30と定める。この基準地点30からの走行軌道を、位置検出装置21のジャイロスコープ21bおよび車速センサ21cが出力する検出信号に基づいて算出し、車両の現在位置40を推定する。そして、この現在位置40を中心とし、最後にGPSを受信したタイミングから走行した距離(基準地点30から現在位置40までの軌道長さ)の20%の長さを一辺とする正方形を移動予測範囲として設定する。この移動予測範囲は、正方形の各辺が緯度方向または経度方向に沿う位置関係となるように設定される。
【0045】
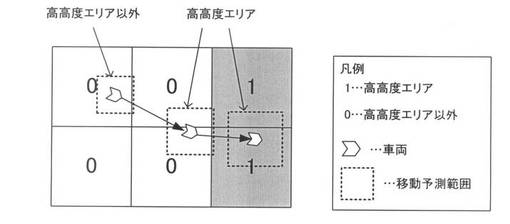
次に、上述したメッシュデータを用いて、車両が高高度エリアに位置しているか否かを判定する(S30)。ここでは、上述したS10にて『現在地精度高』と判定されていた場合は、図5に示すように、位置検出装置21により検出された車両の現在の位置が高高度エリアとして設定されたエリアに位置しているか否かをチェックする。一方、上述したS10にて『現在地精度低』と判定されていた場合は、図6に示すように、上述したS20にて設定した移動予測範囲が、高高度エリアとして設定されたメッシュに重複しているか否かをチェックし、一部でも重複している場合に、車両が高高度エリアに位置していると判定する。
【0046】
車両が高高度エリアに位置していると判定されたとき(高高度走行状態であるとき)は(S30:YES)、処理がS40に移行する。また、車両が高高度エリアに位置していると判定されなかったとき(非高高度走行状態であるとき)は(S30:NO)、処理がS50に移行する。
【0047】
上述したS30にて高高度エリアに位置していると判定されたときには、ハードディスクドライブ22の作動を停止する(S40)。既にハードディスクドライブ22の作動が停止している場合には、停止を継続する。そして、ハードディスクドライブ22の作動を停止した以降は、ハードディスクドライブ22の作動が再開されるまでの間、不揮発性メモリ26に記憶された各種データに基づいて車載装置1の各処理を継続する。その後、処理がS10に戻る。
【0048】
上述したS30にて高高度エリアに位置していると判定されなかったときには、現在ハードディスクドライブ22が作動を停止しており、かつ、車両が高高度エリアから離脱したタイミングから、高高度離脱判定距離以上の距離を走行したか否かを判定する(S50)。ここでいう車両が高高度エリアを脱出したタイミングとは、上述したS30において、「高高度エリアに位置している」と判定されなくなったタイミングである。
【0049】
ハードディスクドライブ22が作動を停止しており、かつ、車両が高高度離脱判定距離以上の距離を走行したと判定された場合は(S50:YES)、ハードディスクドライブ22の動作を開始し(S60)、その後、処理がS10に戻る。
【0050】
一方、ハードディスクドライブ22が作動している場合、または、車両が高高度離脱判定距離以上の距離を走行していないと判定された場合は(S50:NO)、処理がS10に戻る。
【0051】
なお、上述した高高度離脱判定距離は、高高度エリアと高高度エリア以外との境界線付近を走行して頻繁に高高度走行状態と非高高度走行状態とが入れ替わるような状態において、ハードディスクドライブ22が作動停止と作動開始を頻繁に繰り返すことを防止するための余裕を設けた距離である。
(3)効果
このように構成された車載装置1であれば、GPS情報を受信できない場合であっても、推定に伴う誤差を包含する範囲で車両の位置を推定して高高度エリアであるか否かを判定するため、ハードディスクドライブ22の作動の停止と開始とを安全側に制御することができ、作動可能な気圧の下限以下での作動によるハードディスクドライブ22の故障を確実に防止することができる。
(4)変形例
以上、本発明の実施の形態について説明したが、本発明は、上記実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態をとり得ることはいうまでもない。
【0052】
上記実施形態においては、車載装置1はメッシュデータなどが予め記憶されている不揮発性メモリ26を備えており、ハードディスクドライブ22が停止している場合には、不揮発性メモリ26からデータを読み出す構成を例示した。しかし、ハードディスクドライブ22が停止している場合にデータを読み込むことができれば、その具体的な構成は特に限定されない。
【0053】
例えば、車載装置1が起動したタイミングや、所定のエリアに進入したタイミングなどで、ハードディスクドライブ22に記憶されるデータのうち、必要なデータのみを不揮発性メモリ26にコピーする構成としてもよい。このように構成することで、車両の現在の位置から遠く離れた位置のメッシュデータなど、不要なデータを不揮発性メモリ26に常時保持する必要がなくなるので、記憶容量が小さい不揮発性メモリ26を使用することができる。なお、このように構成する場合は、不揮発性メモリ26に代えて揮発性メモリを用いてもよい。
【0054】
また、上記実施形態では、移動予測範囲の一辺は、最後にGPSを受信してから車両が走行した距離の20%の長さとしたが、その割合は特に限定されない。一辺の長さが短いほど車両の位置を小さい範囲に限定できるので、ジャイロスコープ21bと車速センサ21cとから推定される車両の位置の誤差を小さくできる場合は、一辺の長さを短くするとよい。また、一辺の長さは、走行した距離に比例して増加する構成には限定されず、段階的に大きくなる構成としてもよい。
【0055】
また、上記実施形態では、移動予測範囲は、推定される車両の位置を中心とする正方形の範囲である構成を例示したが、移動予測範囲の中心は推定される車両の位置でなくともよく、また、移動予測範囲は正方形でなくともよい。例えば、道路データを参照して、道路に沿った範囲を重点的に移動予測範囲と設定し、海上や湖などの通常は車両が走行しない領域を移動予測範囲から除外する構成や、移動予測範囲を円形とする構成などが考えられる。
【0056】
また、上記実施形態においては、地図上の領域を高高度エリアとそれ以外のエリアとのいずれかに設定したメッシュデータを用いる構成を例示したが、さらに詳細にエリアを分割してもよい。例えば、高高度地域に近い高度の領域(例えば、高度3000m以上5000m未満の領域)を準高高度エリアとして設定し、車両が準高高度エリアに進入した際に、移動予測範囲の設定を開始したり、ハードディスクドライブ22のデータを不揮発性メモリ26にコピーする構成などが考えられる。
【0057】
また、上記実施形態においては、GPS情報を最後に受信してから所定の時間経過した場合に現在地精度低と判定する構成を例示したが、GPS情報を最後に受信してから所定の距離を走行した場合に現在地精度低と判定する構成としてもよい。
【0058】
また、上記実施形態においては、高高度エリアを離脱した後、高高度離脱判定距離以上の距離を走行した場合に、ハードディスクドライブ22の作動を再開する構成を例示したが、高高度エリアを離脱した後、所定の時間経過した場合にハードディスクドライブ22の作動を再開する構成としてもよい。
【0059】
また、上記実施形態においては、GPS用の人工衛星から送信されるGPS情報をGPS受信機21aにて受信する構成を例示したが、車両外部の送信装置から位置情報を受信可能な構成であれば、その具体的な構成は特に限定されない。例えば、道路近傍に配置される通信装置から位置情報を受信する構成が考えられる。
(5)対応関係
以上説明した実施形態において、車載装置1が、本発明におけるハードディスクシステムであり、GPS受信機が、本発明における位置情報受信手段であり、制御装置27が、本発明における位置推定手段,受信判定手段,移動予測範囲設定手段,走行状態判定手段,およびハードディスク作動切り替え手段である。
【図面の簡単な説明】
【0060】
【図1】車載装置1の概略構成を示すブロック図
【図2】地図座標平面分割のイメージとメッシュデータを示す図
【図3】ハードディスクドライブ作動切り替え処理の手順を示すフローチャート
【図4】移動予測範囲の設定方法を示す図
【図5】現在地精度高における高高度エリア判定を示す図
【図6】現在地精度低における高高度エリア判定を示す図
【符号の説明】
【0061】
1…車載装置、21…位置検出装置、21a…GPS受信機、21b…ジャイロスコープ、21c…車速センサ、22…ハードディスクドライブ、23…表示装置、24…音声出力装置、25…操作スイッチ群、26…不揮発性メモリ、27…制御装置、30…基準地点、40…現在位置
【技術分野】
【0001】
本発明は、ハードディスクドライブと、ハードディスクドライブを制御する制御手段とを備え、車両に搭載されるハードディスクシステムおよびプログラムに関する。
【背景技術】
【0002】
近年、地図データに基づいて現在位置周辺の地図をディスプレイに表示したり、目的地までの最適な経路を計算して走行案内を行う車載用ナビゲーション装置において、地図データ等を記憶するための記憶媒体としてハードディスクドライブを用いたものが広く普及している。
【0003】
ハードディスクドライブは、磁性体を塗布した記憶媒体であるディスクに磁気ヘッドを用いてデータを読み書きする記憶装置である。このハードディスクドライブは、作動時において、ディスクの回転により発生する空気の粘性による圧力によって、ディスク上方に位置する磁気ヘッドがディスクから極わずかだけ浮き上がる構造となっている。
【0004】
そのため、周辺の気圧が著しく低下している環境下でハードディスクドライブが作動すると、磁気ヘッドを浮上させる空気圧の低下によりディスクと磁気ヘッドとの間隔を適正な状態に維持できなくなる。その結果、ディスクと磁気ヘッドが衝突することでディスクを損傷してしまう虞がある。
【0005】
気圧は高度が上昇するにつれて低下するため、ハードディスクドライブには高度による使用限界がある。一般的には、ハードディスクドライブの高度に対する動作保証は、高度3000m(約0.7気圧)〜5000m(約0.5気圧)程度となっている。
【0006】
したがって、ハードディスクドライブを搭載した車載用ナビゲーション装置においては、ハードディスクドライブの作動が保証されている高度を超えるような高高地(例えば、3000m級、あるいは4000〜5000m級の道路)での使用が想定される場合、ハードディスクドライブの破損を防止するための対策が必要となる。
【0007】
そこで、従来、車両が所定の高度(例えば3000m)以上に到達したときに、ハードディスクドライブに記憶されている地図データの一部を外部メモリに記憶した後、ハードディスクドライブを停止し、3000m以上の高高地を走行中には外部メモリに記憶されている地図データに基づいて経路案内を行う技術が案出されている(例えば、特許文献1参照)。このような技術により、高高地においてハードディスクドライブを停止させることでハードディスクドライブの破損を防止しながらも、経路案内を継続可能にすることを実現している。
【特許文献1】特開2004−317385号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
車両が所定の高度に到達したことを検出するために、受信装置がGPS情報などの位置情報を受信して現在位置を測定し、高度情報を含む地図データと照合することで、車両が所定の高度に到達したか否かをチェックする構成が一般的である。しかしながら、そのような構成では、トンネルや谷間の道路を走行する場合や、高層建築物などの付近を走行する場合など、なんらかの理由で電波が遮蔽されてGPS情報などの位置情報が受信できない場合、車両の現在位置を測定できない。その場合、車両が所定の高度に到達したことをチェックできず、ハードディスクドライブを停止させることができずに、ハードディスクドライブを破損させる虞がある。
【0009】
本発明は、上記の問題を解決するためになされており、位置情報を受信できない場合であっても、確実にハードディスクの作動停止を行うことができるハードディスクシステムおよびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上述した問題を解決するためになされた請求項1に記載のハードディスクシステムは、車両外部の送信装置から位置情報を受信可能な場合に現在地精度高と判定し、前記位置情報を受信不能な場合に現在地精度低と判定する。
【0011】
現在地精度高と判定している場合には、少なくとも位置情報に基づいて特定された車両の位置が、予め設定した高高度エリアに位置するときに高高度走行状態と判定し、高高度エリアに位置しないときに非高高度走行状態と判定する。
【0012】
ここでいう高高度エリアとは、例えば、例えばハードディスクドライブの作動が保証されている高度の上限を超えた高度のエリアとすることが考えられる。高高度走行状態とは、上記エリアを車両が走行している状態であり、非高高度走行状態とは、上記エリアの範囲外を車両が走行している状態である。
【0013】
また、現在地精度低と判定している場合には、車両の移動予測範囲を設定し、その設定された移動予測範囲に含まれる領域と高高度エリアとの位置関係に応じて、高高度走行状態および非高高度走行状態のいずれであるかを判定する。
【0014】
ここでいう移動予測範囲とは、最後に位置情報を受信した時点から車両が走行した距離と、車両の進行方向および速度から推定される車両の位置と、に基づいて設定される範囲であって、車両の位置を推定する際に生じ得る誤差を含む範囲である。
【0015】
そして、高高度走行状態と判定している場合には、ハードディスクドライブの作動を停止するよう構成されている。
このように構成されたハードディスクシステムは、車両外部からの位置情報を受信できない場合、車両の移動予測範囲を基準として車両が高高度エリアを走行しているか否かを判定し、高高度エリアを走行していると判定された場合にはハードディスクドライブの作動を停止する。
【0016】
上述した移動予測範囲は、車両の位置を推定する際に生じ得る誤差を含む範囲であるため、実際には高高度エリアを走行しているにもかかわらず、車両位置の推定誤差のために高高度エリアを走行していないと判定される虞がない。よって、位置情報を受信できない場合であっても、確実にハードディスクの作動停止を行うことができる。その結果、作動可能な気圧の下限以下での作動によるハードディスクドライブの故障を防止できる。
【0017】
上述したハードディスクシステムは、請求項2に記載したように、ハードディスクドライブの作動を停止した状態において、非高高度走行状態と判定した以降に、ハードディスクドライブの作動を開始するように構成してもよい。
【0018】
このように構成されたハードディスクシステムであれば、車両が高高度エリアに進入したときにハードディスクドライブの作動を停止させ、車両が高高度エリアを離脱した後にハードディスクドライブの作動を再開させることができるので、車両が高高度エリアを走行している期間のみハードディスクドライブの作動を停止させることが可能となる。
【0019】
さらに、車両外部からの位置情報を受信できない場合には、車両の移動予測範囲を基準として車両が高高度エリアを走行しているか否かを判定するため、実際は高高度エリアを走行しているにもかかわらず高高度エリアを離脱したと判定され、ハードディスクドライブを作動させてしまうことを防止できる。
【0020】
なお、ハードディスクドライブの作動を再開するタイミングは、非高高度走行状態と判定された直後であってもよいが、非高高度走行状態と判定された状態で所定の距離を走行したタイミング,または,非高高度走行状態と判定された状態で所定の時間経過したタイミングであってもよい。このようにすることで、高高度エリアと高高度エリア以外との境界線付近を走行して頻繁に高高度走行状態と非高高度走行状態とが入れ替わるような状態において、ハードディスクドライブが作動停止と作動開始を頻繁に繰り返すことを防止できる。
【0021】
ところで、高高度走行状態か非高高度走行状態かを判定する基準となる移動予測範囲と高高度エリアとの具体的な位置関係は特に限定されない。例えば、移動予測範囲が高高度エリアに少しでも重なった場合に高高度走行状態と判定することとしてもよい。そのためには、請求項3に記載したように、現在地精度低と判定している場合には、設定された移動予測範囲に含まれる領域と、高高度エリアと、に重なる領域が存在する位置関係のときに高高度走行状態と判定し、重なる領域が存在しない位置関係のときに非高高度走行状態と判定するように構成するとよい。
【0022】
このように構成されたハードディスクシステムであれば、移動予測範囲が高高度エリアに重なったときに高高度走行状態と判定するので、車両が高高度エリアに進入する前に確実にハードディスクドライブの作動を停止させることができる。
【0023】
また、上述したハードディスクシステムは、請求項4に記載したように、車両の進行方向および速度から推定される車両の位置を中心とし、最後に位置情報を受信した時点から車両が走行した距離に応じた範囲を移動予測範囲として設定するように構成されている。
【0024】
車両の位置を推定する際に生じ得る位置の誤差は、車両の走行した距離が大きくなるにつれて大きくなり得るが、このように構成されたハードディスクシステムであれば、実際の車両の位置を、より確実に移動予測範囲に含めることができるため、車両が高高度走行状態であるという判定を、安全側に余裕をもって行うことができる。
【0025】
また、上述したハードディスクシステムは、高高度走行状態か非高高度走行状態かを判定する方法が、位置情報が受信可能な現在地精度高の場合と、位置情報が受信不能な現在地精度低の場合とで異なる。受信可能な場合と受信不能な場合とを決定する具体的な基準は特に限定されないが、例えば、請求項5に記載したように定めてもよい。それは、受信可能な場合とは、位置情報を最後に受信してから所定の時間を経過していない場合であり、受信不能な場合とは、位置情報を最後に受信してから所定の時間を経過した場合であるとする基準である。
【0026】
このように構成されたハードディスクシステムは、位置情報を所定の時間受信できない場合に、移動予測範囲の設定を開始するため、常時移動予測範囲を設定する処理を行う必要がなく、ハードディスクシステムの処理負担を軽減することができる。
【0027】
また、上記位置情報とは、請求項6に記載したように、GPS情報であってもよい。
このように構成されたハードディスクシステムは、GPS情報によって車両の位置を特定することができる。
【0028】
また、請求項7に記載のプログラムは、請求項1から請求項6のいずれかに記載の制御手段として機能させるための処理手順を、コンピュータシステムに実行させるためのプログラムである。
【0029】
このようなプログラムにより制御されるコンピュータシステムは、請求項1から請求項6のいずれかに記載のハードディスクシステムの一部を構成することができる。
なお、上述した各プログラムは、コンピュータシステムによる処理に適した命令の順番付けられた列からなるものであって、各種記録媒体や通信回線を介して画像処理装置や、これを利用するユーザに提供されるものである。
【発明を実施するための最良の形態】
【0030】
以下に本発明の実施形態を図面と共に説明する。
(1)全体構成
車載装置1は、ナビゲーションシステムの機能を有する装置であって、図1に示すように、車両の現在位置を検出する位置検出装置21と、ハードディスクドライブ(HDD)22と、地図表示画像などの各種画像表示を行う表示装置23と、ガイド音声等の音声情報を出力する音声出力装置24と、ユーザからの各種指示を入力するための操作スイッチ群25と、不揮発性メモリ26と、制御装置27と、を備えている。
【0031】
位置検出装置21は、GPS用の人工衛星からのGPS情報をGPSアンテナを介して受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の速度に応じた検出信号を出力する車速センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0032】
なお、GPS受信機21aがGPS情報を受信できない場合には、ジャイロスコープ21bが出力する検出信号と、車速センサ21cが出力する検出信号と、に基づいて、最後にGPS情報を受信した地点からの走行軌道を算出し、車両の現在位置を推定する。
【0033】
ハードディスクドライブ22は、情報を記憶するハードディスクと、ハードディスクに対して情報を読み書きするための磁気ヘッド,駆動部,コントローラ等からなるドライブと、が一体となった記憶装置である。上述したハードディスクには、データを記憶する記憶領域として、車載装置1を作動させるためのアプリケーションプログラム用の記憶領域,地図情報を示す地図データ用の記憶領域,その他各種データを記憶するための記憶領域など有している。このハードディスクドライブ22に記憶されている地図データには、ナビゲーション機能を実現するために必要な道路データや描画データに加えて、高高度エリアを判定するためのメッシュデータなどが含まれる。
【0034】
上述したメッシュデータとは、以下のように作成されたものである。まず、図2(a)に示すように、地図の座標平面を緯度方向Aおよび経度方向Bに分割したメッシュ状に区切る。そして、図2(b)に示すように、各メッシュに対応するエリアごとに高高度エリアであるか高高度エリア以外であるかを設定したデータをメッシュデータとする。このメッシュデータは、高高度地域(高度5000m以上)が含まれるメッシュを高高度エリアとして設定し、高高度地域が全く含まれない地域を高高度エリア以外として設定している。
【0035】
表示装置23は、液晶ディスプレイ等の表示面を有するカラー表示装置であって、制御装置27からの映像信号の入力に応じて各種画像を表示面に表示する。例えば、車両の走行中においては、ナビゲーション表示画面として、ハードディスクドライブ22から読み出した地図データに示される地図上に、位置検出装置21にて検出した車両の現在位置を示すマーク,名称,目印,各種ランドマークのシンボル等のデータ,目的地までの誘導経路などを重ねた画面が表示される。
【0036】
音声出力装置24は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示装置23による表示と音声出力装置24からの音声出力との両方でユーザに対してルート案内等の各種案内をすることができる。
【0037】
操作スイッチ群25は、表示装置23と一体に構成され、表示装置表示面上に設置されるタッチパネルや、表示装置23の周囲に設けられたメカニカルなキースイッチなどからなる。
【0038】
不揮発性メモリ26は、ハードディスクドライブ22に記憶されているアプリケーションプログラムの一部や上述したメッシュデータを記憶しており、ハードディスクドライブ22の作動が停止した場合には、この不揮発性メモリ26に記憶されているデータに基づいて、必要な処理が行えるようになっている。
【0039】
制御装置27は、CPU,ROM,RAM,I/O,およびこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した車載装置1全体を制御する。また、この制御装置27は、上記ROM,ハードディスクドライブ22,不揮発性メモリ26などから読み込んだアプリケーションプログラムや各種データに従って、ナビゲーション関係の処理や、後述するハードディスクドライブ作動切り替え処理などを実行する。
【0040】
ナビゲーション関係の処理としては、例えば、地図表示処理や経路案内処理等が挙げられる。地図表示処理は、位置検出装置21からの各検出信号に基づいて車両の現在位置を算出し、ハードディスクドライブ22に記憶された地図データに基づいて現在位置付近の地図等を表示装置23に表示する処理である。また、経路案内処理は、ハードディスクドライブ22に記憶された地図データに基づいて、現在位置から、ユーザによる操作スイッチ群25の操作によって設定された目的地までの最適な経路である目的地経路を算出し、現在位置と目的地経路との関係を考慮して目的までの走行案内を行う処理である。このように自動的に最適な経路を設定する手法として、ダイクストラ法によるコスト計算等の手法が知られている。
(2)ハードディスクドライブ作動切り替え処理
以下に、制御装置27によるハードディスクドライブ作動切り替え処理の処理手順を、図3に基づいて説明する。
【0041】
このハードディスクドライブ作動切り替え処理は、車両のアクセサリスイッチがオンにされることによる車載装置1の起動に伴ってハードディスクドライブ22が作動を開始した後、直ちに開始され、上述した地図表示処理や経路案内処理などと並行して実行される。
【0042】
このハードディスクドライブ作動切り替え処理では、まず、GPS情報の受信状況に基づいて、『現在地精度低』であるか否かをチェックする(S10)。ここでは、GPS情報を受信してから、予め定められた未測位継続時間(本実施例においては5分)を経過していない場合に『現在地精度高』と判定し、未測位継続時間を経過している場合に『現在地精度低』と判定する。
【0043】
判定の結果、『現在地精度低』であれば(S10:YES)、処理がS20へ移行する。一方、『現在地精度高』であれば(S10:NO)、処理がS30へ移行する。
なお、未測位継続時間は、高層建築物,トンネル,谷などの車両環境によって一時的にGPS情報が受信できなくなった場合に、即座に現在地精度高から現在地精度低に切り替わることが無いように、適切な時間に設定される。
【0044】
上述したS10にて『現在地精度低』と判定されたときは、車両の移動予測範囲を設定する(S20)。車両の移動予測範囲は、次のように設定する。まず、図4に示すように、最後にGPS情報を受信した地点を基準地点30と定める。この基準地点30からの走行軌道を、位置検出装置21のジャイロスコープ21bおよび車速センサ21cが出力する検出信号に基づいて算出し、車両の現在位置40を推定する。そして、この現在位置40を中心とし、最後にGPSを受信したタイミングから走行した距離(基準地点30から現在位置40までの軌道長さ)の20%の長さを一辺とする正方形を移動予測範囲として設定する。この移動予測範囲は、正方形の各辺が緯度方向または経度方向に沿う位置関係となるように設定される。
【0045】
次に、上述したメッシュデータを用いて、車両が高高度エリアに位置しているか否かを判定する(S30)。ここでは、上述したS10にて『現在地精度高』と判定されていた場合は、図5に示すように、位置検出装置21により検出された車両の現在の位置が高高度エリアとして設定されたエリアに位置しているか否かをチェックする。一方、上述したS10にて『現在地精度低』と判定されていた場合は、図6に示すように、上述したS20にて設定した移動予測範囲が、高高度エリアとして設定されたメッシュに重複しているか否かをチェックし、一部でも重複している場合に、車両が高高度エリアに位置していると判定する。
【0046】
車両が高高度エリアに位置していると判定されたとき(高高度走行状態であるとき)は(S30:YES)、処理がS40に移行する。また、車両が高高度エリアに位置していると判定されなかったとき(非高高度走行状態であるとき)は(S30:NO)、処理がS50に移行する。
【0047】
上述したS30にて高高度エリアに位置していると判定されたときには、ハードディスクドライブ22の作動を停止する(S40)。既にハードディスクドライブ22の作動が停止している場合には、停止を継続する。そして、ハードディスクドライブ22の作動を停止した以降は、ハードディスクドライブ22の作動が再開されるまでの間、不揮発性メモリ26に記憶された各種データに基づいて車載装置1の各処理を継続する。その後、処理がS10に戻る。
【0048】
上述したS30にて高高度エリアに位置していると判定されなかったときには、現在ハードディスクドライブ22が作動を停止しており、かつ、車両が高高度エリアから離脱したタイミングから、高高度離脱判定距離以上の距離を走行したか否かを判定する(S50)。ここでいう車両が高高度エリアを脱出したタイミングとは、上述したS30において、「高高度エリアに位置している」と判定されなくなったタイミングである。
【0049】
ハードディスクドライブ22が作動を停止しており、かつ、車両が高高度離脱判定距離以上の距離を走行したと判定された場合は(S50:YES)、ハードディスクドライブ22の動作を開始し(S60)、その後、処理がS10に戻る。
【0050】
一方、ハードディスクドライブ22が作動している場合、または、車両が高高度離脱判定距離以上の距離を走行していないと判定された場合は(S50:NO)、処理がS10に戻る。
【0051】
なお、上述した高高度離脱判定距離は、高高度エリアと高高度エリア以外との境界線付近を走行して頻繁に高高度走行状態と非高高度走行状態とが入れ替わるような状態において、ハードディスクドライブ22が作動停止と作動開始を頻繁に繰り返すことを防止するための余裕を設けた距離である。
(3)効果
このように構成された車載装置1であれば、GPS情報を受信できない場合であっても、推定に伴う誤差を包含する範囲で車両の位置を推定して高高度エリアであるか否かを判定するため、ハードディスクドライブ22の作動の停止と開始とを安全側に制御することができ、作動可能な気圧の下限以下での作動によるハードディスクドライブ22の故障を確実に防止することができる。
(4)変形例
以上、本発明の実施の形態について説明したが、本発明は、上記実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態をとり得ることはいうまでもない。
【0052】
上記実施形態においては、車載装置1はメッシュデータなどが予め記憶されている不揮発性メモリ26を備えており、ハードディスクドライブ22が停止している場合には、不揮発性メモリ26からデータを読み出す構成を例示した。しかし、ハードディスクドライブ22が停止している場合にデータを読み込むことができれば、その具体的な構成は特に限定されない。
【0053】
例えば、車載装置1が起動したタイミングや、所定のエリアに進入したタイミングなどで、ハードディスクドライブ22に記憶されるデータのうち、必要なデータのみを不揮発性メモリ26にコピーする構成としてもよい。このように構成することで、車両の現在の位置から遠く離れた位置のメッシュデータなど、不要なデータを不揮発性メモリ26に常時保持する必要がなくなるので、記憶容量が小さい不揮発性メモリ26を使用することができる。なお、このように構成する場合は、不揮発性メモリ26に代えて揮発性メモリを用いてもよい。
【0054】
また、上記実施形態では、移動予測範囲の一辺は、最後にGPSを受信してから車両が走行した距離の20%の長さとしたが、その割合は特に限定されない。一辺の長さが短いほど車両の位置を小さい範囲に限定できるので、ジャイロスコープ21bと車速センサ21cとから推定される車両の位置の誤差を小さくできる場合は、一辺の長さを短くするとよい。また、一辺の長さは、走行した距離に比例して増加する構成には限定されず、段階的に大きくなる構成としてもよい。
【0055】
また、上記実施形態では、移動予測範囲は、推定される車両の位置を中心とする正方形の範囲である構成を例示したが、移動予測範囲の中心は推定される車両の位置でなくともよく、また、移動予測範囲は正方形でなくともよい。例えば、道路データを参照して、道路に沿った範囲を重点的に移動予測範囲と設定し、海上や湖などの通常は車両が走行しない領域を移動予測範囲から除外する構成や、移動予測範囲を円形とする構成などが考えられる。
【0056】
また、上記実施形態においては、地図上の領域を高高度エリアとそれ以外のエリアとのいずれかに設定したメッシュデータを用いる構成を例示したが、さらに詳細にエリアを分割してもよい。例えば、高高度地域に近い高度の領域(例えば、高度3000m以上5000m未満の領域)を準高高度エリアとして設定し、車両が準高高度エリアに進入した際に、移動予測範囲の設定を開始したり、ハードディスクドライブ22のデータを不揮発性メモリ26にコピーする構成などが考えられる。
【0057】
また、上記実施形態においては、GPS情報を最後に受信してから所定の時間経過した場合に現在地精度低と判定する構成を例示したが、GPS情報を最後に受信してから所定の距離を走行した場合に現在地精度低と判定する構成としてもよい。
【0058】
また、上記実施形態においては、高高度エリアを離脱した後、高高度離脱判定距離以上の距離を走行した場合に、ハードディスクドライブ22の作動を再開する構成を例示したが、高高度エリアを離脱した後、所定の時間経過した場合にハードディスクドライブ22の作動を再開する構成としてもよい。
【0059】
また、上記実施形態においては、GPS用の人工衛星から送信されるGPS情報をGPS受信機21aにて受信する構成を例示したが、車両外部の送信装置から位置情報を受信可能な構成であれば、その具体的な構成は特に限定されない。例えば、道路近傍に配置される通信装置から位置情報を受信する構成が考えられる。
(5)対応関係
以上説明した実施形態において、車載装置1が、本発明におけるハードディスクシステムであり、GPS受信機が、本発明における位置情報受信手段であり、制御装置27が、本発明における位置推定手段,受信判定手段,移動予測範囲設定手段,走行状態判定手段,およびハードディスク作動切り替え手段である。
【図面の簡単な説明】
【0060】
【図1】車載装置1の概略構成を示すブロック図
【図2】地図座標平面分割のイメージとメッシュデータを示す図
【図3】ハードディスクドライブ作動切り替え処理の手順を示すフローチャート
【図4】移動予測範囲の設定方法を示す図
【図5】現在地精度高における高高度エリア判定を示す図
【図6】現在地精度低における高高度エリア判定を示す図
【符号の説明】
【0061】
1…車載装置、21…位置検出装置、21a…GPS受信機、21b…ジャイロスコープ、21c…車速センサ、22…ハードディスクドライブ、23…表示装置、24…音声出力装置、25…操作スイッチ群、26…不揮発性メモリ、27…制御装置、30…基準地点、40…現在位置
【特許請求の範囲】
【請求項1】
ハードディスクドライブと、前記ハードディスクドライブを制御する制御手段と、を備え、車両に搭載されるハードディスクシステムであって、
前記車両外部の送信装置から、前記車両の位置を示す位置情報を受信する位置情報受信手段を備え、
前記制御手段は、
前記車両の進行方向および速度を測定して前記車両の位置を推定する位置推定手段と、
前記位置情報受信手段が前記位置情報を受信可能な場合に現在地精度高と判定し、前記位置情報を受信不能な場合に現在地精度低と判定する受信判定手段と、
前記受信判定手段が現在地精度低と判定している場合に、前記位置情報受信手段が最後に前記位置情報を受信した時点から前記車両が走行した距離と、前記位置推定手段が推定する前記車両の位置と、に基づいて、前記車両の移動予測範囲を設定する移動予測範囲設定手段と、
前記受信判定手段が現在地精度高と判定している場合には、少なくとも前記位置情報受信手段が受信した前記位置情報に基づいて特定された前記車両の位置が、予め設定された高高度エリアに位置するときに高高度走行状態と判定し、前記高高度エリアに位置しないときに非高高度走行状態と判定する一方、前記受信判定手段が現在地精度低と判定している場合には、前記移動予測範囲設定手段により設定された移動予測範囲に含まれる領域と前記高高度エリアとの位置関係に応じて、高高度走行状態および非高高度走行状態のいずれであるかを判定する走行状態判定手段と、
前記走行状態判定手段が高高度走行状態と判定している場合には、前記ハードディスクドライブの作動を停止するハードディスク作動切り替え手段と、を有する
ことを特徴とするハードディスクシステム。
【請求項2】
前記ハードディスク作動切り替え手段は、前記ハードディスクドライブの作動を停止した状態において、前記走行状態判定手段が非高高度走行状態と判定した以降に、前記ハードディスクドライブの作動を開始する
ことを特徴とする請求項1に記載のハードディスクシステム。
【請求項3】
前記走行状態判定手段は、前記受信判定手段が現在地精度低と判定している場合には、前記移動予測範囲に含まれる領域と、前記高高度エリアと、に重なる領域が存在する位置関係のときに前記高高度走行状態と判定し、重なる領域が存在しない位置関係のときに前記非高高度走行状態と判定する
ことを特徴とする請求項1または請求項2に記載のハードディスクシステム。
【請求項4】
前記移動予測範囲設定手段は、前記位置推定手段により推定される前記車両の位置を中心とし、前記位置情報受信手段が最後に前記位置情報を受信した時点から車両が走行した距離に応じた範囲を前記移動予測範囲として設定する
ことを特徴とする請求項1から請求項3のいずれかに記載のハードディスクシステム。
【請求項5】
前記位置情報受信手段が前記位置情報を受信可能な場合とは、前記位置情報受信手段が前記位置情報を最後に受信してから所定の時間を経過していない場合であり、
前記位置情報受信手段が前記位置情報を受信不能な場合とは、前記位置情報受信手段が前記位置情報を最後に受信してから所定の時間を経過した場合である
ことを特徴とする請求項1から請求項4のいずれかに記載のハードディスクシステム。
【請求項6】
前記位置情報受信手段は、前記位置情報として、GPS情報を受信する
ことを特徴とする請求項1から請求項5のいずれかに記載のハードディスクシステム。
【請求項7】
請求項1から請求項6のいずれかに記載の制御手段として機能させるための処理手順を、コンピュータシステムに実行させるためのプログラム。
【請求項1】
ハードディスクドライブと、前記ハードディスクドライブを制御する制御手段と、を備え、車両に搭載されるハードディスクシステムであって、
前記車両外部の送信装置から、前記車両の位置を示す位置情報を受信する位置情報受信手段を備え、
前記制御手段は、
前記車両の進行方向および速度を測定して前記車両の位置を推定する位置推定手段と、
前記位置情報受信手段が前記位置情報を受信可能な場合に現在地精度高と判定し、前記位置情報を受信不能な場合に現在地精度低と判定する受信判定手段と、
前記受信判定手段が現在地精度低と判定している場合に、前記位置情報受信手段が最後に前記位置情報を受信した時点から前記車両が走行した距離と、前記位置推定手段が推定する前記車両の位置と、に基づいて、前記車両の移動予測範囲を設定する移動予測範囲設定手段と、
前記受信判定手段が現在地精度高と判定している場合には、少なくとも前記位置情報受信手段が受信した前記位置情報に基づいて特定された前記車両の位置が、予め設定された高高度エリアに位置するときに高高度走行状態と判定し、前記高高度エリアに位置しないときに非高高度走行状態と判定する一方、前記受信判定手段が現在地精度低と判定している場合には、前記移動予測範囲設定手段により設定された移動予測範囲に含まれる領域と前記高高度エリアとの位置関係に応じて、高高度走行状態および非高高度走行状態のいずれであるかを判定する走行状態判定手段と、
前記走行状態判定手段が高高度走行状態と判定している場合には、前記ハードディスクドライブの作動を停止するハードディスク作動切り替え手段と、を有する
ことを特徴とするハードディスクシステム。
【請求項2】
前記ハードディスク作動切り替え手段は、前記ハードディスクドライブの作動を停止した状態において、前記走行状態判定手段が非高高度走行状態と判定した以降に、前記ハードディスクドライブの作動を開始する
ことを特徴とする請求項1に記載のハードディスクシステム。
【請求項3】
前記走行状態判定手段は、前記受信判定手段が現在地精度低と判定している場合には、前記移動予測範囲に含まれる領域と、前記高高度エリアと、に重なる領域が存在する位置関係のときに前記高高度走行状態と判定し、重なる領域が存在しない位置関係のときに前記非高高度走行状態と判定する
ことを特徴とする請求項1または請求項2に記載のハードディスクシステム。
【請求項4】
前記移動予測範囲設定手段は、前記位置推定手段により推定される前記車両の位置を中心とし、前記位置情報受信手段が最後に前記位置情報を受信した時点から車両が走行した距離に応じた範囲を前記移動予測範囲として設定する
ことを特徴とする請求項1から請求項3のいずれかに記載のハードディスクシステム。
【請求項5】
前記位置情報受信手段が前記位置情報を受信可能な場合とは、前記位置情報受信手段が前記位置情報を最後に受信してから所定の時間を経過していない場合であり、
前記位置情報受信手段が前記位置情報を受信不能な場合とは、前記位置情報受信手段が前記位置情報を最後に受信してから所定の時間を経過した場合である
ことを特徴とする請求項1から請求項4のいずれかに記載のハードディスクシステム。
【請求項6】
前記位置情報受信手段は、前記位置情報として、GPS情報を受信する
ことを特徴とする請求項1から請求項5のいずれかに記載のハードディスクシステム。
【請求項7】
請求項1から請求項6のいずれかに記載の制御手段として機能させるための処理手順を、コンピュータシステムに実行させるためのプログラム。
【図1】


【図3】
【図4】
【図2】
【図5】

【図6】
【図3】
【図4】
【図2】
【図5】
【図6】
【公開番号】特開2009−79918(P2009−79918A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−247402(P2007−247402)
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月25日(2007.9.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]