
バイアスがかかった測定値に基づいた衛星航法システムの誤り検出

【課題】本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
【解決手段】方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップも含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、バイアスがかかった測定値に基づいた衛星航法システムの誤り検出に関する。
【背景技術】
【0002】
[0001]衛星航法システム(satellite navigation system)は、衛星ベースの無線航法システムであり、このシステムでは、複数の衛星が、地球を周回しており、衛星に対する位置を決定するために地上の受信機によって使用できる情報をブロードキャストする。例示的な衛星航法システムは、全地球測位システム(GPS)、GLONASSシステム、北斗(Beidou)航法システム、およびガリレオ測位システムを含む。
【0003】
[0002]GPSは、6つの軌道面内において高度2万kmで地球を周回している24機以上の衛星を含む。これらの衛星は、L1(1575.42MHz)、L2(1227.6MHz)、およびL5(1176.45MHz)として知られる3つの異なる周波数の1つまたは複数において、測距コード(ranging code)および航法データ(navigation data)をブロードキャストする。GPS衛星は、様々なパラメータを含む航法データを送信し、様々なパラメータは、衛星の位置およびヘルス(health)についての情報を提供する。各GPS衛星は、固有の測距コードを送信し、固有の測距コードは、GPS受信機から当該衛星までの距離を計算するために、GPS受信機によって使用することができる。この距離は、受信機のローカルクロック誤差に関して補正されていないので、疑似距離(pseudorange)と呼ばれる。
【0004】
[0003]GPS受信機に利用可能な他の情報が存在しない場合、GPS受信機の位置、速度、および時刻を正確に計算するために、受信機は、4機以上の衛星に対して疑似距離測定を行うべきである。GPS受信機によって行われる疑似距離測定は、電離層伝搬遅延、対流圏伝搬遅延、衛星クロック誤差、ユーザクロック誤差、マルチパス誤差、および他の予想外の誤差源など、いくつかの誤差源に影響されやすい。予想外の誤差源は、「ステップ誤差(step error)」と呼ばれる突然のかなり大きな誤差、または「ランプ誤差(ramp error)」と呼ばれる徐々に増加する誤差を含み得る。そのようなステップ誤差またはランプ誤差は、一般に、めったに発生することはないが(例えば、飛行時間当たり約0.0001の確率)、計算された位置、速度、および時刻に誤差を生じさせることがある。
【0005】
[0004]航空グレード(aviation−grade)のGPS受信機は、すべての利用可能な測定値の中で、単一の誤った測定値の存在から守られる(例えば、ステップ誤差とランプ誤差の両方を検出する)必要があった。多くの従来のGPS受信機は、単一の誤った測定値の存在に対処するのに十分な機能を備えている。GPS受信機は、一般に、可能な場合はいつでも、航法ソリューションにおける使用から誤った測定値を排除する。誤った測定値を排除することが可能ではない場合、GPS受信機は、出力された位置は間違っている可能性があり、信頼することができないことを示すために、警告を提供することができる。
【発明の概要】
【発明が解決しようとする課題】
【0006】
衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【課題を解決するための手段】
【0007】
[0005]本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。方法は、位置解(position solution)に対応する複数の測定残差(measurement residual)を計算するステップと、検定統計量(test statistic)を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップも含み、閾値を計算するステップは、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布(non−central chi squared distribution)に属する値となるように、閾値を選択するステップを含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
【0008】
[0006]図面は例示的な実施形態を示しているにすぎず、したがって、範囲を限定するものと見なされるべきではないことを理解したうえで、添付の図面を使用しながら、例示的な実施形態が、さらに具体的かつ詳細に説明される。
【図面の簡単な説明】
【0009】
【図1】[0007]衛星航法システムの一例を示す図である。
【図2】[0008]疑似距離測定値に誤りが発生したかどうかを判定するための方法の一例を示す図である。
【図3】[0009]フォールスアラームの所望の確率を達成する、検定統計量についての閾値の一例のグラフ表現である。
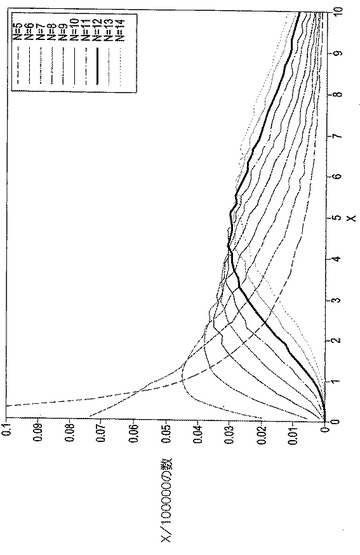
【図4】[0010]例示的な検定統計量のカイ2乗分布を示すヒストグラムである。
【図5】[0011]測定値にバイアスをかけたときの、フォールスアラームの所望の確率を達成する、検定統計量についての閾値の一例のグラフ表現である。
【発明を実施するための形態】
【0010】
[0012]慣例によれば、説明される様々な特徴は、原寸に比例して描かれておらず、例示的な実施形態に関連する特定の特徴を強調して描かれている。
[0013]以下の詳細な説明では、説明の一部を形成する添付の図面が参照され、添付の図面では、特定の例示的な実施形態が、例によって示される。しかし、他の実施形態を利用することができること、ならびに論理的、機械的、および電気的な変更を行い得ることを理解されたい。さらに、図面の図および本明細書で提示される方法は、個々のステップを実行し得る順序を限定するものと解釈すべきではない。したがって、以下の詳細な説明は、限定的な意味で解釈すべきではない。
【0011】
[0014]以下で説明される実施形態は、衛星航法システム用の受信機におけるランプ誤差の検出に関する。特に、以下で説明されるいくつかの実施形態は、測定バイアス(measurement bias)であることが明白な誤差を考慮できる、誤り検出のための方法およびシステムを提供する。例えば、以下で説明される方法およびシステムは、長期間にわたって強い相関がある誤差を生じさせることが予想される誤差源(例えば、SA、電離層伝搬遅延)の存在下で、誤り検出を適用することができる。この誤り検出(FD)は、予想されるバイアスと予想される雑音項の効果を別々に考慮することができ、このことは、航法機能のインテグリティを推定する場合に、受信機がより正確であること(例えば、より控えめ(conservative)にならないこと)を可能にすることができる。対照的に、従来のFDは、バイアスは大きな無相関の雑音項によってモデル化できると仮定し、そのモデルを予想されるランダム雑音と組み合わせることによって、誤差源における予想されるバイアスを考慮する。したがって、この従来のFDは、バイアスのかかった誤差をバイアスのかかっていない雑音から分離せず、このことは、航法機能のインテグリティを推定する場合に、受信機がより控えめになる原因になり得る。
【0012】
[0015]図1は、衛星航法システム100の一例を示している。衛星航法システム100は、複数の衛星102〜110と、1つまたは複数の受信機112とを含む。上で言及したように、衛星102〜110は、受信機112によって受信される信号を送信することができる。受信機112は、衛星102〜110の1つまたは複数から信号を受信し、その信号に基づいて位置解を計算することができる。例示的な衛星航法システム100は、全地球測位システム(GPS)、GLONASSシステム、北斗航法システム、およびガリレオ測位システムを含む。
【0013】
[0016]受信機112は、1つまたは複数のメモリデバイス116に結合された1つまたは複数の処理デバイス114を含むことができる。1つまたは複数のメモリデバイス116は、命令118を含むことができ、命令118は、1つまたは複数の処理デバイス114によって実行されたときに、1つまたは複数の処理デバイス114に1つまたは複数の動作を実行させることができる。本明細書で使用される場合、メモリ116が、命令118を含み、命令118が、処理デバイス114によって実行されたときに、処理デバイス114にある機能を実行させる場合、受信機112は、その機能を実行するように構成される。
【0014】
[0017]一例では、1つまたは複数の処理デバイス114は、マイクロプロセッサ、マイクロコントローラ、デジタル信号プロセッサなどを含むことができる。1つまたは複数のメモリデバイス116は、プロセッサ可読命令またはデータ構造を記憶するために使用される、任意の適切なプロセッサ可読媒体を含むことができる。
【0015】
[0018]受信機112は、アンテナ120も含むことができ、アンテナ120は、処理デバイス114に結合され、衛星102〜110からの信号を感知するように構成される。一例では、受信機112は、ユーザに情報を提供するために、1つまたは複数の出力デバイス122を含むことができる。出力デバイス122は、ディスプレイ、スピーカ、触覚フィードバック発生器、ライト、および他の出力機構を含むことができる。一例では、受信機112は、より大規模な電子デバイス(例えば、モバイルフォン、ラップトップ、タブレットなど)または乗物(例えば、自動車、航空機、船舶など)に統合することができる。
【0016】
[0019]一例では、受信機112は、信号が衛星102〜110からアンテナ120まで伝搬するのに要した時間を測定し、ひいては衛星102〜110とアンテナ120の間の距離を推定するように構成される。この距離推定値は、「疑似距離」と呼ばれる。衛星102〜110によって送信された信号は、変化する大気(図示されず)中を伝搬するので、疑似距離は、誤差を含んだ誤ったものになり得る。通常、受信機112は、標準的なモデルを使用して、これらの誤差を補償することができる。受信機112は、複数の疑似距離に基づいて、位置解を計算するようにさらに構成することができる。位置解は、地球相対座標(例えば、緯度、経度、および高度)を含む、任意の形式を取ることができる。
【0017】
[0020]受信機112によって計算された位置解が有効である、確実性のレベルを提供するために、受信機112は、位置解を計算するのに使用される測定値に誤りが発生したがどうかを判定しようと試みることができる。一例では、誤りは、衛星102において発生することがあり、それは、その衛星に関する疑似距離測定値がゆっくりと増加または減少する原因となる。このゆっくりした増加または減少は、ランプ誤差として知られている。誤りを検出するため、受信機112は、冗長な測定を、すなわち、基本的な位置解を決定するために使用するよりも多くの測定を実行することができる。その後、受信機は、測定値の間に何らかの不整合が存在しないかどうかを判定して、誤りが発生したかどうかを決定することができる。多くの例では、誤りを検出するために、最低限5つの疑似距離が使用されるが、受信機112のアーキテクチャに応じて、より多数または少数の疑似距離を使用することができる。
【0018】
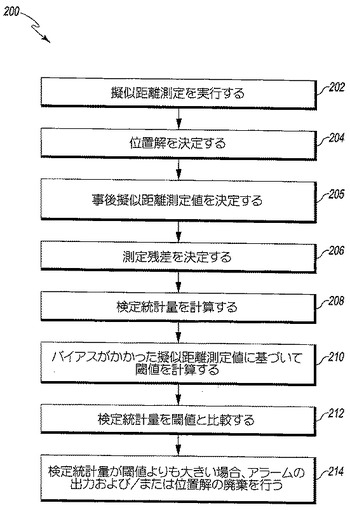
[0021]図2は、疑似距離測定値に誤りが発生したかどうかを判定するための方法200の一例を示している。ブロック202において、受信機112は、5つ以上の疑似距離測定値ρiを作成することができる。疑似距離測定値は、衛星102〜110からの1つの信号、地上基準局からの信号に基づくことができ、気圧高度計によって導出することができ、または他の類似の機構によって導出してもよい。
【0019】
[0022]一例では、衛星102に関する疑似距離測定値のためのモデルは、
【0020】
【数1】

【0021】
として与えられ、ここで、riは、第iの衛星の位置であり、ruは、受信機112の位置であり、buは、受信機112についての(秒単位の)クロックバイアスであり、
【0022】
【数2】
【0023】
は、測定の誤差である。この誤差は、とりわけ、衛星102〜110のクロックにおける正規誤差(normal error)、信号が大気中を伝搬することによって導入される遅延、直接信号ばかりでなく衛星からの反射信号も受信することによって生じる誤差を含む。
【0024】
[0023]ブロック204において、受信機112は、位置解を決定することができる。ruとc・buから成る、決定された位置解
【0025】
【数3】
【0026】
は、ブロック202において参照された上記の式に埋め込まれる。この位置解は、最小2乗法、カルマンフィルタリング、または他の類似の技法を含む、任意の適切な技法を使用して、計算することができる。
【0027】
[0024]ブロック205において、位置解
【0028】
【数4】
【0029】
の事後推定値と、電離層および対流圏遅延、相対論的効果、衛星クロック誤差
【0030】
【数5】
【0031】
によって引き起こされるバイアス寄与の推定値とを与えることで、
事後疑似距離測定推定値(a posteriori pseudorange measurement estimate)を決定することができる。事後疑似距離測定推定値は、
【0032】
【数6】
【0033】
のように定義することができる。したがって、この事後疑似距離測定推定値は、位置解を計算するのに使用される(実際の)疑似距離測定値とは対照的に、受信機112によって計算された位置解に基づいており、(実際の)疑似距離測定値は、例えば、信号が衛星102〜110からアンテナ120まで伝搬するのに要した時間の測定値に基づいて獲得される。
【0034】
[0025]ブロック206において、受信機112は、複数の測定残差zを決定することができる。測定残差は、事後疑似距離
【0035】
【数7】
【0036】
と(実際の)疑似距離測定値ρiの間の差から成る。この例では、その後、測定残差zは、現在の位置解推定値についてテイラ展開を実行することによって、位置解の誤差Δx≡[Δr c・Δb]Tに線形に関係するとして、モデル化することができる。この線形化された結果は、以下のように与えることができる。
【0037】
【数8】
【0038】
[0026]誤り検出を行わずに基本的な位置解を決定するのに必要とされるよりも多くの疑似距離測定が行われ、疑似距離測定値が位置解に組み込まれる場合、測定残差を使用して、疑似距離測定値に存在する誤差を識別することができるが、その関係は単純ではない。
【0039】
[0027]ブロック208において、受信機112は、検定統計量dを計算することができる。一例では、検定統計量dを形成するために、複数の測定残差zを結合することができ、検定統計量dは、各測定残差を平方した後、平方された測定残差を合算することによって結合された、複数の測定残差から成る。すなわち、
【0040】
【数9】
【0041】
となる。
[0028]ブロック210において、受信機112は、閾値Tを計算することができる。閾値は、検定統計量と比較して、誤りが発生したかどうかを判定するために使用することができ、フォールスアラームの所望の確率Pfaが達成されるように選択することができる。この閾値は、真の誤差に対する検定統計量の感度を最大化しながら、フォールスアラームの確率を最小化するような方法で選択することができる。一例では、フォールスアラームの指定された確率PFAを提供する最小の閾値が、最も望ましく、したがって、それが選択される。
【0042】
[0029]Tの値は、以下の式をTについて解くことによって、計算することができる。
【0043】
【数10】
【0044】
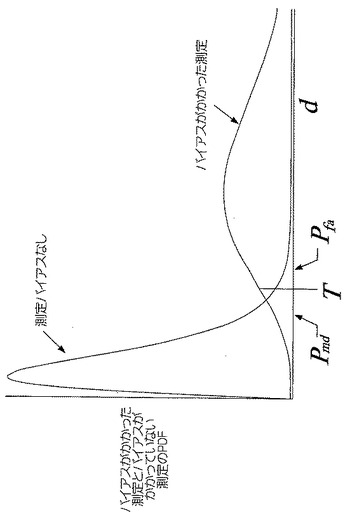
ここで、PDF(x)は、どの測定値も衛星故障の影響を含まないと仮定した場合の、検定統計量dの確率分布関数である。従来技術の典型的な実施では、誤りのない測定値を用いて形成される検定統計量は、自由度がN−4のΧ2分布から取られると仮定される。これは、誤りのない測定誤差は、ゼロ平均のガウス確率変数だけから成るという仮定と矛盾しない。この仮定は、検定統計量の計算の背後にある数学を大いに単純化するが、誤りのない測定値が、他の確率分布から、特に非ゼロ平均を有する確率分布から引き出される誤差を含む場合に、検定統計量をより控えめにする。フォールスアラームの所望の確率Pfaを達成する閾値Tの選択は、図3に示されるように、グラフ的に解釈することができる。
【0045】
[0030]例えば、疑似距離測定値において非ゼロ平均またはバイアスが考慮されない(例えば、疑似距離測定のための衛星102〜110からの信号は、ゼロ平均白色雑音を含むと見なされる)場合、閾値Tは、図3のTの右側の、曲線302(「測定バイアスなし」曲線)の下側の面積が、フォールスアラームの所望の確率Pfaに等しくなるように、選択することができる。疑似距離測定値においてバイアスが考慮されず、衛星故障が観測されない場合、PDFは、中心カイ2乗分布(central chi squared distribution)とすることができる。
【0046】
[0031]受信機112は、閾値Tを計算するとき、疑似距離測定値におけるバイアスを考慮する。すなわち、受信機112は、疑似距離測定のために使用される衛星102〜110からの信号における非ゼロ平均雑音を考慮することができる。衛星天体暦誤差(satellite ephemeris error)および電離層遅延誤差を含む、いくつかの誤差源は、非常に長時間の定数を有する成分から成ることができる。
【0047】
[0032]受信機112は、疑似距離測定値には正規分布するバイアスを有するランダム量によるバイアスがかかっているという仮定に基づいて、閾値Tを計算することができる。すなわち、疑似距離測定誤差は、
【0048】
【数11】
【0049】
によって与えることができる。
[0033]これらの仮定を用いる場合、1組の測定バイアスが与えられると、検定統計量のPDFは、もはやΧ2分布ではなく、非心Χ2分布である。閾値Tは、代わりに以下の式を使用して、計算することができ、
【0050】
【数12】
【0051】
nは、自由度の数であり、λは、非心度パラメータ(non−centrality parameter)である。しかし、λ自体は、測定誤差のために仮定された特定のバイアスから導出される。これらのバイアスは確率変数であるので、λも確率変数である。実際、λは、それ自体がカイ2乗分布を有する。
【0052】
[0034]したがって、閾値Tを計算するため、受信機112は、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択することができ、選択された値は、フォールスアラームの所望の確率に対応する。すなわち、いずれか特定の非心度パラメータλを与えた場合、そのパラメータに関する閾値T(λ)は、上記の式
【0053】
【数13】
【0054】
を使用して、計算することができる。その後、ベイズの定理を使用して、システムは、非心度パラメータλのすべての可能な値にわたって積分を行って、
【0055】
【数14】
【0056】
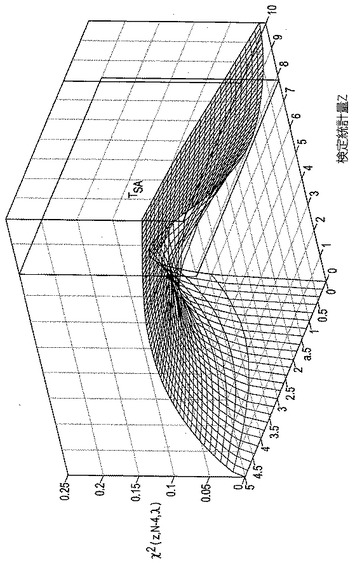
を得ることができ、ここで、PFAは、フォールスアラームの確率に対応し、χ2は、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。衛星航法システムでは、受信機112の未知数の数は、4に等しく、したがって、式は、
【0057】
【数15】
【0058】
となる。これは、対応する非心度パラメータλの確率によって加重された、図5におけるTとラベル付けされた平面の右側の体積を見出すことと等価である。
[0035]ブロック212において、ブロック208において計算された検定統計量は、ブロック210において計算された閾値と比較することができる。閾値よりも大きい検定統計量は、誤りであると見なされる。閾値よりも小さい検定統計量は、有効であると見なされ、有効な位置解に対応する。
【0059】
[0036]したがって、ブロック214において、検定統計量が閾値よりも大きい場合、受信機112は、誤った測定値を考慮した適切なアクションを実行することができる。一例では、受信機112は、誤りを示すアラームを出力することができる。例えば、アラームは、提供された位置解が不正確かもしれないこと、および/または位置解を計算するのに使用された測定値に誤りが発生したことを示すことができる。別の例では、受信機112は、位置解を廃棄することができる。その後、受信機112は、誤りを引き起こしている1つまたは複数の疑似距離測定値を回避する試みにおいて、疑似距離測定値の別の組み合わせを使用して、位置解を再計算しようと試みることができる。例えば、第1の位置解が、衛星102、103、104、106、108、110からの疑似距離測定値に基づいて計算され、この第1の位置解に関して、誤りという判定が下された場合、衛星110を除外した、衛星102、103、104、106、108からの疑似距離測定値に基づいて、第2の位置解を計算することができる。誤りが発生し続ける場合、可能であれば、誤りなしに位置解を計算できるまで、他の衛星を除外しながら、このプロセスを繰り返すことができる。
【0060】
[0037]検定統計量が閾値よりも小さい場合、受信機112は、有効な位置解に基づいて、適切なアクションを実行することができる。例えば、受信機112は、有効である(例えば、受信機112の許容限度内に収まる正確さがある)として、位置解を出力することができる。
【0061】
[0038]疑似距離測定値におけるバイアスを考慮しながら、閾値Tを計算することによって、閾値Tを、バイアスが考慮されないときよりも正確にすることが可能である。閾値Tをより正確に計算することができるので、位置解が誤りに対応するかどうかを判定するときに、より高い精度を使用することができる。
【0062】
[0039]疑似距離測定値におけるバイアスを考慮しない従来のシステムは、「補正係数(fudge factor)」を一般に実施し、「補正係数」は、測定値におけるバイアスを含む、未知の誤差を考慮するために、(例えば、測定された誤差に基づいて初期位置解誤差が計算された後に)位置解誤差の大きさを盲目的に増加させる。しかし、本明細書で説明される方法およびシステムを使用する場合、測定値におけるバイアスを直接的に考慮することができ、位置解誤差の大きさをより正確に決定することができる。したがって、バイアスを考慮するための「補正係数」は、必要とされない。バイアスを直接的に考慮することの結果として、一般に、受信機112は、位置解に依存するシステムに問題が影響を与え得る前に、より迅速に、問題を識別できるようになる。
【0063】
[0040]上で言及したように、本明細書で説明される方法および動作は、プロセッサ可読媒体上の命令に対応することができる。プロセッサ可読媒体は、汎用もしくは専用のコンピュータもしくはプロセッサ、または任意のプログラム可能論理デバイスによってアクセスできる、任意の利用可能な媒体として実施することができる。適切なプロセッサ可読媒体は、記憶媒体またはメモリ媒体、ならびにネットワークおよび/またはワイヤレスリンクなどの通信媒体を介して伝達される、電気信号、電磁気信号、またはデジタル信号などの伝送媒体など、有形な媒体を含むことができる。
【0064】
[0041]記憶媒体またはメモリ媒体は、従来のハードディスク、コンパクトディスク−リードオンリメモリ(CD−ROM)、(同期式ダイナミックランダムアクセスメモリ(SDRAM)、ダブルデータレート(DDR)RAM、RAMBUSダイナミックRAM(RDRAM)、スタティックRAM(SRAM)などを含むが、それらに限定されない)ランダムアクセスメモリ(RAM)などの揮発性または不揮発性媒体、リードオンリメモリ(ROM)、電気的消去可能プログラマブルROM(EEPROM)、およびフラッシュメモリなどの、磁気媒体または光媒体を含むことができる。
例示的な実施形態
[0042]実施例1は、衛星航法システム用の受信機において誤りを検出するための方法を含み、方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを含む。
【0065】
[0043]実施例2は、実施例1の方法を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0066】
[0044]実施例3は、実施例1〜2のいずれかの方法を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0067】
[0045]実施例4は、実施例1〜3のいずれかの方法を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0068】
[0046]実施例5は、実施例1〜4のいずれかの方法を含み、閾値は、式
【0069】
【数16】
【0070】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0071】
[0047]実施例6は、実施例5の方法を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
[0048]実施例7は、実施例1〜6のいずれかの方法を含み、検定統計量が閾値よりも小さい場合、位置解を有効であるとして出力するステップを含む。
【0072】
[0049]実施例8は、衛星航法システムのために位置解における誤りを検出するための装置を含み、装置は、少なくとも1つの処理デバイスと、少なくとも1つの処理デバイスに結合された出力デバイスと、少なくとも1つの処理デバイスに結合された衛星航法システム用の受信機と、少なくとも1つの処理デバイスに結合された少なくとも1つのメモリデバイスとを備え、少なくとも1つのメモリデバイスは、少なくとも1つの処理デバイスによって実行するための命令を有し、命令は、少なくとも1つの処理デバイスによって実行されたときに、少なくとも1つの処理デバイスに、受信機の位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力デバイスから出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを行わせる。
【0073】
[0050]実施例9は、実施例8の装置を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0074】
[0051]実施例10は、実施例8〜9のいずれかの装置を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0075】
[0052]実施例11は、実施例8〜10のいずれかの装置を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0076】
[0053]実施例12は、実施例8〜11のいずれかの装置を含み、閾値は、式
【0077】
【数17】
【0078】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0079】
[0054]実施例13は、実施例12の装置を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
[0055]実施例14は、実施例8〜13のいずれかの装置を含み、命令は、少なくとも1つの処理デバイスによって実行されたときに、少なくとも1つの処理デバイスに、検定統計量が閾値よりも小さい場合、位置解を有効であるとして出力デバイスから出力するステップを行わせる。
【0080】
[0056]実施例15は、命令を含むプロセッサ可読媒体を含み、命令は、少なくとも1つのプロセッサによって実行されたときに、少なくとも1つのプロセッサに、受信機の位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力デバイスから出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを行わせる。
【0081】
[0057]実施例16は、実施例15のプロセッサ可読媒体を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0082】
[0058]実施例17は、実施例15〜16のいずれかのプロセッサ可読媒体を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0083】
[0059]実施例18は、実施例15〜17のいずれかのプロセッサ可読媒体を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0084】
[0060]実施例19は、実施例15〜18のいずれかのプロセッサ可読媒体を含み、閾値は、式
【0085】
【数18】
【0086】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0087】
[0061]実施例20は、実施例19のプロセッサ可読媒体を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
【0088】
[0062]本明細書では、特定の実施形態が示され、説明されたが、示された特定の実施形態を、同じ目的を達成するために計算される任意の構成で置き換え得ることが、当業者であれば理解されよう。したがって、本発明は、特許請求の範囲およびその均等物によってのみ限定されることが、明白に意図されている。
【符号の説明】
【0089】
100 衛星航法システム
102 衛星
103 衛星
104 衛星
106 衛星
108 衛星
110 衛星
112 受信機
114 処理デバイス
116 メモリデバイス
118 命令
120 アンテナ
122 出力デバイス
【技術分野】
【0001】
本発明は、バイアスがかかった測定値に基づいた衛星航法システムの誤り検出に関する。
【背景技術】
【0002】
[0001]衛星航法システム(satellite navigation system)は、衛星ベースの無線航法システムであり、このシステムでは、複数の衛星が、地球を周回しており、衛星に対する位置を決定するために地上の受信機によって使用できる情報をブロードキャストする。例示的な衛星航法システムは、全地球測位システム(GPS)、GLONASSシステム、北斗(Beidou)航法システム、およびガリレオ測位システムを含む。
【0003】
[0002]GPSは、6つの軌道面内において高度2万kmで地球を周回している24機以上の衛星を含む。これらの衛星は、L1(1575.42MHz)、L2(1227.6MHz)、およびL5(1176.45MHz)として知られる3つの異なる周波数の1つまたは複数において、測距コード(ranging code)および航法データ(navigation data)をブロードキャストする。GPS衛星は、様々なパラメータを含む航法データを送信し、様々なパラメータは、衛星の位置およびヘルス(health)についての情報を提供する。各GPS衛星は、固有の測距コードを送信し、固有の測距コードは、GPS受信機から当該衛星までの距離を計算するために、GPS受信機によって使用することができる。この距離は、受信機のローカルクロック誤差に関して補正されていないので、疑似距離(pseudorange)と呼ばれる。
【0004】
[0003]GPS受信機に利用可能な他の情報が存在しない場合、GPS受信機の位置、速度、および時刻を正確に計算するために、受信機は、4機以上の衛星に対して疑似距離測定を行うべきである。GPS受信機によって行われる疑似距離測定は、電離層伝搬遅延、対流圏伝搬遅延、衛星クロック誤差、ユーザクロック誤差、マルチパス誤差、および他の予想外の誤差源など、いくつかの誤差源に影響されやすい。予想外の誤差源は、「ステップ誤差(step error)」と呼ばれる突然のかなり大きな誤差、または「ランプ誤差(ramp error)」と呼ばれる徐々に増加する誤差を含み得る。そのようなステップ誤差またはランプ誤差は、一般に、めったに発生することはないが(例えば、飛行時間当たり約0.0001の確率)、計算された位置、速度、および時刻に誤差を生じさせることがある。
【0005】
[0004]航空グレード(aviation−grade)のGPS受信機は、すべての利用可能な測定値の中で、単一の誤った測定値の存在から守られる(例えば、ステップ誤差とランプ誤差の両方を検出する)必要があった。多くの従来のGPS受信機は、単一の誤った測定値の存在に対処するのに十分な機能を備えている。GPS受信機は、一般に、可能な場合はいつでも、航法ソリューションにおける使用から誤った測定値を排除する。誤った測定値を排除することが可能ではない場合、GPS受信機は、出力された位置は間違っている可能性があり、信頼することができないことを示すために、警告を提供することができる。
【発明の概要】
【発明が解決しようとする課題】
【0006】
衛星航法システム用の受信機において誤りを検出するための方法を提供する。
【課題を解決するための手段】
【0007】
[0005]本明細書で開示される例示的な実施形態は、衛星航法システム用の受信機において誤りを検出するための方法を提供する。方法は、位置解(position solution)に対応する複数の測定残差(measurement residual)を計算するステップと、検定統計量(test statistic)を形成するために、複数の測定残差を結合するステップとを含む。方法は、検定統計量に対応する閾値を計算するステップも含み、閾値を計算するステップは、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布(non−central chi squared distribution)に属する値となるように、閾値を選択するステップを含む。検定統計量は、閾値と比較され、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行する。
【0008】
[0006]図面は例示的な実施形態を示しているにすぎず、したがって、範囲を限定するものと見なされるべきではないことを理解したうえで、添付の図面を使用しながら、例示的な実施形態が、さらに具体的かつ詳細に説明される。
【図面の簡単な説明】
【0009】
【図1】[0007]衛星航法システムの一例を示す図である。
【図2】[0008]疑似距離測定値に誤りが発生したかどうかを判定するための方法の一例を示す図である。
【図3】[0009]フォールスアラームの所望の確率を達成する、検定統計量についての閾値の一例のグラフ表現である。
【図4】[0010]例示的な検定統計量のカイ2乗分布を示すヒストグラムである。
【図5】[0011]測定値にバイアスをかけたときの、フォールスアラームの所望の確率を達成する、検定統計量についての閾値の一例のグラフ表現である。
【発明を実施するための形態】
【0010】
[0012]慣例によれば、説明される様々な特徴は、原寸に比例して描かれておらず、例示的な実施形態に関連する特定の特徴を強調して描かれている。
[0013]以下の詳細な説明では、説明の一部を形成する添付の図面が参照され、添付の図面では、特定の例示的な実施形態が、例によって示される。しかし、他の実施形態を利用することができること、ならびに論理的、機械的、および電気的な変更を行い得ることを理解されたい。さらに、図面の図および本明細書で提示される方法は、個々のステップを実行し得る順序を限定するものと解釈すべきではない。したがって、以下の詳細な説明は、限定的な意味で解釈すべきではない。
【0011】
[0014]以下で説明される実施形態は、衛星航法システム用の受信機におけるランプ誤差の検出に関する。特に、以下で説明されるいくつかの実施形態は、測定バイアス(measurement bias)であることが明白な誤差を考慮できる、誤り検出のための方法およびシステムを提供する。例えば、以下で説明される方法およびシステムは、長期間にわたって強い相関がある誤差を生じさせることが予想される誤差源(例えば、SA、電離層伝搬遅延)の存在下で、誤り検出を適用することができる。この誤り検出(FD)は、予想されるバイアスと予想される雑音項の効果を別々に考慮することができ、このことは、航法機能のインテグリティを推定する場合に、受信機がより正確であること(例えば、より控えめ(conservative)にならないこと)を可能にすることができる。対照的に、従来のFDは、バイアスは大きな無相関の雑音項によってモデル化できると仮定し、そのモデルを予想されるランダム雑音と組み合わせることによって、誤差源における予想されるバイアスを考慮する。したがって、この従来のFDは、バイアスのかかった誤差をバイアスのかかっていない雑音から分離せず、このことは、航法機能のインテグリティを推定する場合に、受信機がより控えめになる原因になり得る。
【0012】
[0015]図1は、衛星航法システム100の一例を示している。衛星航法システム100は、複数の衛星102〜110と、1つまたは複数の受信機112とを含む。上で言及したように、衛星102〜110は、受信機112によって受信される信号を送信することができる。受信機112は、衛星102〜110の1つまたは複数から信号を受信し、その信号に基づいて位置解を計算することができる。例示的な衛星航法システム100は、全地球測位システム(GPS)、GLONASSシステム、北斗航法システム、およびガリレオ測位システムを含む。
【0013】
[0016]受信機112は、1つまたは複数のメモリデバイス116に結合された1つまたは複数の処理デバイス114を含むことができる。1つまたは複数のメモリデバイス116は、命令118を含むことができ、命令118は、1つまたは複数の処理デバイス114によって実行されたときに、1つまたは複数の処理デバイス114に1つまたは複数の動作を実行させることができる。本明細書で使用される場合、メモリ116が、命令118を含み、命令118が、処理デバイス114によって実行されたときに、処理デバイス114にある機能を実行させる場合、受信機112は、その機能を実行するように構成される。
【0014】
[0017]一例では、1つまたは複数の処理デバイス114は、マイクロプロセッサ、マイクロコントローラ、デジタル信号プロセッサなどを含むことができる。1つまたは複数のメモリデバイス116は、プロセッサ可読命令またはデータ構造を記憶するために使用される、任意の適切なプロセッサ可読媒体を含むことができる。
【0015】
[0018]受信機112は、アンテナ120も含むことができ、アンテナ120は、処理デバイス114に結合され、衛星102〜110からの信号を感知するように構成される。一例では、受信機112は、ユーザに情報を提供するために、1つまたは複数の出力デバイス122を含むことができる。出力デバイス122は、ディスプレイ、スピーカ、触覚フィードバック発生器、ライト、および他の出力機構を含むことができる。一例では、受信機112は、より大規模な電子デバイス(例えば、モバイルフォン、ラップトップ、タブレットなど)または乗物(例えば、自動車、航空機、船舶など)に統合することができる。
【0016】
[0019]一例では、受信機112は、信号が衛星102〜110からアンテナ120まで伝搬するのに要した時間を測定し、ひいては衛星102〜110とアンテナ120の間の距離を推定するように構成される。この距離推定値は、「疑似距離」と呼ばれる。衛星102〜110によって送信された信号は、変化する大気(図示されず)中を伝搬するので、疑似距離は、誤差を含んだ誤ったものになり得る。通常、受信機112は、標準的なモデルを使用して、これらの誤差を補償することができる。受信機112は、複数の疑似距離に基づいて、位置解を計算するようにさらに構成することができる。位置解は、地球相対座標(例えば、緯度、経度、および高度)を含む、任意の形式を取ることができる。
【0017】
[0020]受信機112によって計算された位置解が有効である、確実性のレベルを提供するために、受信機112は、位置解を計算するのに使用される測定値に誤りが発生したがどうかを判定しようと試みることができる。一例では、誤りは、衛星102において発生することがあり、それは、その衛星に関する疑似距離測定値がゆっくりと増加または減少する原因となる。このゆっくりした増加または減少は、ランプ誤差として知られている。誤りを検出するため、受信機112は、冗長な測定を、すなわち、基本的な位置解を決定するために使用するよりも多くの測定を実行することができる。その後、受信機は、測定値の間に何らかの不整合が存在しないかどうかを判定して、誤りが発生したかどうかを決定することができる。多くの例では、誤りを検出するために、最低限5つの疑似距離が使用されるが、受信機112のアーキテクチャに応じて、より多数または少数の疑似距離を使用することができる。
【0018】
[0021]図2は、疑似距離測定値に誤りが発生したかどうかを判定するための方法200の一例を示している。ブロック202において、受信機112は、5つ以上の疑似距離測定値ρiを作成することができる。疑似距離測定値は、衛星102〜110からの1つの信号、地上基準局からの信号に基づくことができ、気圧高度計によって導出することができ、または他の類似の機構によって導出してもよい。
【0019】
[0022]一例では、衛星102に関する疑似距離測定値のためのモデルは、
【0020】
【数1】
【0021】
として与えられ、ここで、riは、第iの衛星の位置であり、ruは、受信機112の位置であり、buは、受信機112についての(秒単位の)クロックバイアスであり、
【0022】
【数2】
【0023】
は、測定の誤差である。この誤差は、とりわけ、衛星102〜110のクロックにおける正規誤差(normal error)、信号が大気中を伝搬することによって導入される遅延、直接信号ばかりでなく衛星からの反射信号も受信することによって生じる誤差を含む。
【0024】
[0023]ブロック204において、受信機112は、位置解を決定することができる。ruとc・buから成る、決定された位置解
【0025】
【数3】
【0026】
は、ブロック202において参照された上記の式に埋め込まれる。この位置解は、最小2乗法、カルマンフィルタリング、または他の類似の技法を含む、任意の適切な技法を使用して、計算することができる。
【0027】
[0024]ブロック205において、位置解
【0028】
【数4】
【0029】
の事後推定値と、電離層および対流圏遅延、相対論的効果、衛星クロック誤差
【0030】
【数5】
【0031】
によって引き起こされるバイアス寄与の推定値とを与えることで、
事後疑似距離測定推定値(a posteriori pseudorange measurement estimate)を決定することができる。事後疑似距離測定推定値は、
【0032】
【数6】
【0033】
のように定義することができる。したがって、この事後疑似距離測定推定値は、位置解を計算するのに使用される(実際の)疑似距離測定値とは対照的に、受信機112によって計算された位置解に基づいており、(実際の)疑似距離測定値は、例えば、信号が衛星102〜110からアンテナ120まで伝搬するのに要した時間の測定値に基づいて獲得される。
【0034】
[0025]ブロック206において、受信機112は、複数の測定残差zを決定することができる。測定残差は、事後疑似距離
【0035】
【数7】
【0036】
と(実際の)疑似距離測定値ρiの間の差から成る。この例では、その後、測定残差zは、現在の位置解推定値についてテイラ展開を実行することによって、位置解の誤差Δx≡[Δr c・Δb]Tに線形に関係するとして、モデル化することができる。この線形化された結果は、以下のように与えることができる。
【0037】
【数8】
【0038】
[0026]誤り検出を行わずに基本的な位置解を決定するのに必要とされるよりも多くの疑似距離測定が行われ、疑似距離測定値が位置解に組み込まれる場合、測定残差を使用して、疑似距離測定値に存在する誤差を識別することができるが、その関係は単純ではない。
【0039】
[0027]ブロック208において、受信機112は、検定統計量dを計算することができる。一例では、検定統計量dを形成するために、複数の測定残差zを結合することができ、検定統計量dは、各測定残差を平方した後、平方された測定残差を合算することによって結合された、複数の測定残差から成る。すなわち、
【0040】
【数9】
【0041】
となる。
[0028]ブロック210において、受信機112は、閾値Tを計算することができる。閾値は、検定統計量と比較して、誤りが発生したかどうかを判定するために使用することができ、フォールスアラームの所望の確率Pfaが達成されるように選択することができる。この閾値は、真の誤差に対する検定統計量の感度を最大化しながら、フォールスアラームの確率を最小化するような方法で選択することができる。一例では、フォールスアラームの指定された確率PFAを提供する最小の閾値が、最も望ましく、したがって、それが選択される。
【0042】
[0029]Tの値は、以下の式をTについて解くことによって、計算することができる。
【0043】
【数10】
【0044】
ここで、PDF(x)は、どの測定値も衛星故障の影響を含まないと仮定した場合の、検定統計量dの確率分布関数である。従来技術の典型的な実施では、誤りのない測定値を用いて形成される検定統計量は、自由度がN−4のΧ2分布から取られると仮定される。これは、誤りのない測定誤差は、ゼロ平均のガウス確率変数だけから成るという仮定と矛盾しない。この仮定は、検定統計量の計算の背後にある数学を大いに単純化するが、誤りのない測定値が、他の確率分布から、特に非ゼロ平均を有する確率分布から引き出される誤差を含む場合に、検定統計量をより控えめにする。フォールスアラームの所望の確率Pfaを達成する閾値Tの選択は、図3に示されるように、グラフ的に解釈することができる。
【0045】
[0030]例えば、疑似距離測定値において非ゼロ平均またはバイアスが考慮されない(例えば、疑似距離測定のための衛星102〜110からの信号は、ゼロ平均白色雑音を含むと見なされる)場合、閾値Tは、図3のTの右側の、曲線302(「測定バイアスなし」曲線)の下側の面積が、フォールスアラームの所望の確率Pfaに等しくなるように、選択することができる。疑似距離測定値においてバイアスが考慮されず、衛星故障が観測されない場合、PDFは、中心カイ2乗分布(central chi squared distribution)とすることができる。
【0046】
[0031]受信機112は、閾値Tを計算するとき、疑似距離測定値におけるバイアスを考慮する。すなわち、受信機112は、疑似距離測定のために使用される衛星102〜110からの信号における非ゼロ平均雑音を考慮することができる。衛星天体暦誤差(satellite ephemeris error)および電離層遅延誤差を含む、いくつかの誤差源は、非常に長時間の定数を有する成分から成ることができる。
【0047】
[0032]受信機112は、疑似距離測定値には正規分布するバイアスを有するランダム量によるバイアスがかかっているという仮定に基づいて、閾値Tを計算することができる。すなわち、疑似距離測定誤差は、
【0048】
【数11】
【0049】
によって与えることができる。
[0033]これらの仮定を用いる場合、1組の測定バイアスが与えられると、検定統計量のPDFは、もはやΧ2分布ではなく、非心Χ2分布である。閾値Tは、代わりに以下の式を使用して、計算することができ、
【0050】
【数12】
【0051】
nは、自由度の数であり、λは、非心度パラメータ(non−centrality parameter)である。しかし、λ自体は、測定誤差のために仮定された特定のバイアスから導出される。これらのバイアスは確率変数であるので、λも確率変数である。実際、λは、それ自体がカイ2乗分布を有する。
【0052】
[0034]したがって、閾値Tを計算するため、受信機112は、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択することができ、選択された値は、フォールスアラームの所望の確率に対応する。すなわち、いずれか特定の非心度パラメータλを与えた場合、そのパラメータに関する閾値T(λ)は、上記の式
【0053】
【数13】
【0054】
を使用して、計算することができる。その後、ベイズの定理を使用して、システムは、非心度パラメータλのすべての可能な値にわたって積分を行って、
【0055】
【数14】
【0056】
を得ることができ、ここで、PFAは、フォールスアラームの確率に対応し、χ2は、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。衛星航法システムでは、受信機112の未知数の数は、4に等しく、したがって、式は、
【0057】
【数15】
【0058】
となる。これは、対応する非心度パラメータλの確率によって加重された、図5におけるTとラベル付けされた平面の右側の体積を見出すことと等価である。
[0035]ブロック212において、ブロック208において計算された検定統計量は、ブロック210において計算された閾値と比較することができる。閾値よりも大きい検定統計量は、誤りであると見なされる。閾値よりも小さい検定統計量は、有効であると見なされ、有効な位置解に対応する。
【0059】
[0036]したがって、ブロック214において、検定統計量が閾値よりも大きい場合、受信機112は、誤った測定値を考慮した適切なアクションを実行することができる。一例では、受信機112は、誤りを示すアラームを出力することができる。例えば、アラームは、提供された位置解が不正確かもしれないこと、および/または位置解を計算するのに使用された測定値に誤りが発生したことを示すことができる。別の例では、受信機112は、位置解を廃棄することができる。その後、受信機112は、誤りを引き起こしている1つまたは複数の疑似距離測定値を回避する試みにおいて、疑似距離測定値の別の組み合わせを使用して、位置解を再計算しようと試みることができる。例えば、第1の位置解が、衛星102、103、104、106、108、110からの疑似距離測定値に基づいて計算され、この第1の位置解に関して、誤りという判定が下された場合、衛星110を除外した、衛星102、103、104、106、108からの疑似距離測定値に基づいて、第2の位置解を計算することができる。誤りが発生し続ける場合、可能であれば、誤りなしに位置解を計算できるまで、他の衛星を除外しながら、このプロセスを繰り返すことができる。
【0060】
[0037]検定統計量が閾値よりも小さい場合、受信機112は、有効な位置解に基づいて、適切なアクションを実行することができる。例えば、受信機112は、有効である(例えば、受信機112の許容限度内に収まる正確さがある)として、位置解を出力することができる。
【0061】
[0038]疑似距離測定値におけるバイアスを考慮しながら、閾値Tを計算することによって、閾値Tを、バイアスが考慮されないときよりも正確にすることが可能である。閾値Tをより正確に計算することができるので、位置解が誤りに対応するかどうかを判定するときに、より高い精度を使用することができる。
【0062】
[0039]疑似距離測定値におけるバイアスを考慮しない従来のシステムは、「補正係数(fudge factor)」を一般に実施し、「補正係数」は、測定値におけるバイアスを含む、未知の誤差を考慮するために、(例えば、測定された誤差に基づいて初期位置解誤差が計算された後に)位置解誤差の大きさを盲目的に増加させる。しかし、本明細書で説明される方法およびシステムを使用する場合、測定値におけるバイアスを直接的に考慮することができ、位置解誤差の大きさをより正確に決定することができる。したがって、バイアスを考慮するための「補正係数」は、必要とされない。バイアスを直接的に考慮することの結果として、一般に、受信機112は、位置解に依存するシステムに問題が影響を与え得る前に、より迅速に、問題を識別できるようになる。
【0063】
[0040]上で言及したように、本明細書で説明される方法および動作は、プロセッサ可読媒体上の命令に対応することができる。プロセッサ可読媒体は、汎用もしくは専用のコンピュータもしくはプロセッサ、または任意のプログラム可能論理デバイスによってアクセスできる、任意の利用可能な媒体として実施することができる。適切なプロセッサ可読媒体は、記憶媒体またはメモリ媒体、ならびにネットワークおよび/またはワイヤレスリンクなどの通信媒体を介して伝達される、電気信号、電磁気信号、またはデジタル信号などの伝送媒体など、有形な媒体を含むことができる。
【0064】
[0041]記憶媒体またはメモリ媒体は、従来のハードディスク、コンパクトディスク−リードオンリメモリ(CD−ROM)、(同期式ダイナミックランダムアクセスメモリ(SDRAM)、ダブルデータレート(DDR)RAM、RAMBUSダイナミックRAM(RDRAM)、スタティックRAM(SRAM)などを含むが、それらに限定されない)ランダムアクセスメモリ(RAM)などの揮発性または不揮発性媒体、リードオンリメモリ(ROM)、電気的消去可能プログラマブルROM(EEPROM)、およびフラッシュメモリなどの、磁気媒体または光媒体を含むことができる。
例示的な実施形態
[0042]実施例1は、衛星航法システム用の受信機において誤りを検出するための方法を含み、方法は、位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを含む。
【0065】
[0043]実施例2は、実施例1の方法を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0066】
[0044]実施例3は、実施例1〜2のいずれかの方法を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0067】
[0045]実施例4は、実施例1〜3のいずれかの方法を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0068】
[0046]実施例5は、実施例1〜4のいずれかの方法を含み、閾値は、式
【0069】
【数16】
【0070】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0071】
[0047]実施例6は、実施例5の方法を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
[0048]実施例7は、実施例1〜6のいずれかの方法を含み、検定統計量が閾値よりも小さい場合、位置解を有効であるとして出力するステップを含む。
【0072】
[0049]実施例8は、衛星航法システムのために位置解における誤りを検出するための装置を含み、装置は、少なくとも1つの処理デバイスと、少なくとも1つの処理デバイスに結合された出力デバイスと、少なくとも1つの処理デバイスに結合された衛星航法システム用の受信機と、少なくとも1つの処理デバイスに結合された少なくとも1つのメモリデバイスとを備え、少なくとも1つのメモリデバイスは、少なくとも1つの処理デバイスによって実行するための命令を有し、命令は、少なくとも1つの処理デバイスによって実行されたときに、少なくとも1つの処理デバイスに、受信機の位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力デバイスから出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを行わせる。
【0073】
[0050]実施例9は、実施例8の装置を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0074】
[0051]実施例10は、実施例8〜9のいずれかの装置を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0075】
[0052]実施例11は、実施例8〜10のいずれかの装置を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0076】
[0053]実施例12は、実施例8〜11のいずれかの装置を含み、閾値は、式
【0077】
【数17】
【0078】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0079】
[0054]実施例13は、実施例12の装置を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
[0055]実施例14は、実施例8〜13のいずれかの装置を含み、命令は、少なくとも1つの処理デバイスによって実行されたときに、少なくとも1つの処理デバイスに、検定統計量が閾値よりも小さい場合、位置解を有効であるとして出力デバイスから出力するステップを行わせる。
【0080】
[0056]実施例15は、命令を含むプロセッサ可読媒体を含み、命令は、少なくとも1つのプロセッサによって実行されたときに、少なくとも1つのプロセッサに、受信機の位置解に対応する複数の測定残差を計算するステップと、検定統計量を形成するために、複数の測定残差を結合するステップと、検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、閾値を選択するステップを含む、ステップと、検定統計量を閾値と比較するステップと、検定統計量が閾値よりも大きい場合、位置解に誤りがあることを示すアラームを出力デバイスから出力することと、位置解を廃棄することのうち、少なくとも一方を実行するステップとを行わせる。
【0081】
[0057]実施例16は、実施例15のプロセッサ可読媒体を含み、閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、非心度パラメータは、可能な検定統計量の非心カイ2乗分布に対応する。
【0082】
[0058]実施例17は、実施例15〜16のいずれかのプロセッサ可読媒体を含み、複数の測定残差を結合するステップが、複数の測定残差の各測定残差を平方するステップと、検定統計量を形成するために、平方された測定残差を合算するステップとを含む。
【0083】
[0059]実施例18は、実施例15〜17のいずれかのプロセッサ可読媒体を含み、測定残差は、位置解に基づいた予測距離と、位置解を計算するのに使用される実際の疑似距離測定値の間の差を含む。
【0084】
[0060]実施例19は、実施例15〜18のいずれかのプロセッサ可読媒体を含み、閾値は、式
【0085】
【数18】
【0086】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの確率に対応し、χは、可能な検定統計量の分布に対応し、λは、非心度パラメータに対応し、Tは、閾値に対応し、xは、測定残差に対応し、Mは、システム内の未知数の数に対応する。
【0087】
[0061]実施例20は、実施例19のプロセッサ可読媒体を含み、式は、受信機による疑似距離測定値における誤差にはランダム量によるバイアスがかかっていることを考慮する。
【0088】
[0062]本明細書では、特定の実施形態が示され、説明されたが、示された特定の実施形態を、同じ目的を達成するために計算される任意の構成で置き換え得ることが、当業者であれば理解されよう。したがって、本発明は、特許請求の範囲およびその均等物によってのみ限定されることが、明白に意図されている。
【符号の説明】
【0089】
100 衛星航法システム
102 衛星
103 衛星
104 衛星
106 衛星
108 衛星
110 衛星
112 受信機
114 処理デバイス
116 メモリデバイス
118 命令
120 アンテナ
122 出力デバイス
【特許請求の範囲】
【請求項1】
衛星航法システム用の受信機において誤りを検出するための方法であって、
位置解に対応する複数の測定残差を計算するステップと、
検定統計量を形成するために、前記複数の測定残差を結合するステップであって、前記複数の測定残差の各測定残差を平方するステップと、前記検定統計量を形成するために、前記平方された測定残差を合算するステップとを含む、ステップと、
前記検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、前記閾値を選択するステップを含む、ステップと、
前記検定統計量を前記閾値と比較するステップと、
前記検定統計量が前記閾値よりも大きい場合、前記位置解に誤りがあることを示すアラームを出力することと、前記位置解を廃棄することのうち、少なくとも一方を実行するステップと
を含む方法。
【請求項2】
閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、前記非心度パラメータは、可能な検定統計量の前記非心カイ2乗分布に対応する請求項1に記載の方法。
【請求項3】
前記閾値は、式
【数1】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの前記確率に対応し、χは、可能な検定統計量の前記分布に対応し、λは、非心度パラメータに対応し、Tは、前記閾値に対応し、xは、前記測定残差に対応し、Mは、前記システム内の未知数の数に対応する請求項1または2のいずれかに記載の方法。
【請求項1】
衛星航法システム用の受信機において誤りを検出するための方法であって、
位置解に対応する複数の測定残差を計算するステップと、
検定統計量を形成するために、前記複数の測定残差を結合するステップであって、前記複数の測定残差の各測定残差を平方するステップと、前記検定統計量を形成するために、前記平方された測定残差を合算するステップとを含む、ステップと、
前記検定統計量に対応する閾値を計算するステップであって、フォールスアラームの所望の確率に対応する、可能な検定統計量の非心カイ2乗分布に属する値となるように、前記閾値を選択するステップを含む、ステップと、
前記検定統計量を前記閾値と比較するステップと、
前記検定統計量が前記閾値よりも大きい場合、前記位置解に誤りがあることを示すアラームを出力することと、前記位置解を廃棄することのうち、少なくとも一方を実行するステップと
を含む方法。
【請求項2】
閾値を計算するステップが、非心度パラメータの可能な値にわたって積分を行うステップを含み、前記非心度パラメータは、可能な検定統計量の前記非心カイ2乗分布に対応する請求項1に記載の方法。
【請求項3】
前記閾値は、式
【数1】
を満たす閾値を選ぶことによって選択され、ここで、PFAは、フォールスアラームの前記確率に対応し、χは、可能な検定統計量の前記分布に対応し、λは、非心度パラメータに対応し、Tは、前記閾値に対応し、xは、前記測定残差に対応し、Mは、前記システム内の未知数の数に対応する請求項1または2のいずれかに記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−19893(P2013−19893A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−144082(P2012−144082)
【出願日】平成24年6月27日(2012.6.27)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−144082(P2012−144082)
【出願日】平成24年6月27日(2012.6.27)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]