
バケットコンベヤの従動軸回転検出装置
【課題】 駆動軸と従動軸に取着したスプロケットにコンベヤチェーンを巻き掛けし、該コンベヤチェーンには複数のバケットを等間隔で取付けたバケットコンベヤであって、その従動軸の回転速度を検出する為の従動軸回転検出装置の提供。
【解決手段】 従動軸3には回転検出体19を取付けると共に回転検出体19には同一半径上に複数の穴21,21・・・を一定ピッチで形成し、該回転検出体19に対向して近接検出器20を配置し、この近接検出器20にて回転検出体19の回転速度の変化を検出する。
【解決手段】 従動軸3には回転検出体19を取付けると共に回転検出体19には同一半径上に複数の穴21,21・・・を一定ピッチで形成し、該回転検出体19に対向して近接検出器20を配置し、この近接検出器20にて回転検出体19の回転速度の変化を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はバケットコンベヤにおいて、ケーシングの外部から従動軸の回転変動を検出する装置に関するものである。
【背景技術】
【0002】
バケットコンベヤとは駆動軸と従動軸に取着したスプロケットにコンベヤチェーンを巻き掛けし、該コンベヤチェーンには物を搬送する為の複数のバケットが一定間隔で取付けられている。そして該バケットには搬送される粒状物や粉状物が投入口から入れられ、排出口から排出される。
【0003】
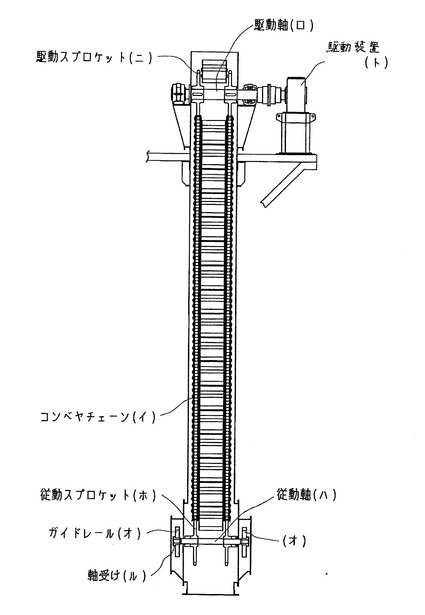
図8、図9は従来の一般的な縦型のバケットコンベヤ装置を示している概略図である。同図の(イ)はコンベヤチェーン、(ロ)は駆動軸、(ハ)は従動軸、(ニ)は駆動スプロケット、(ホ)は従動スプロケットを夫々表している。駆動軸(ロ)には所定の間隔をおいて両駆動スプロケット(ニ)、(ニ)が取着され、従動軸(ハ)には両従動スプロケット(ホ)、(ホ)が取付けられている。
【0004】
そして、これら駆動スプロケット(ニ)、(ニ)と従動スプロケット(ホ)、(ホ)にはコンベヤチェーン(イ)、(イ)が夫々巻き掛けされ、両コンベヤチェーン(イ)、(イ)に跨って複数のバケット(ヘ)、(ヘ)・・・が一定ピッチで取付けられている。上記駆動軸(ロ)は軸受けに支持され、駆動装置(ト)によって回転することが出来、駆動軸(ロ)が回転するならば駆動スプロケット(ニ)、(ニ)が回ってコンベヤチェーン(イ)、(イ)は走行する。同時にコンベヤチェーン(イ)、(イ)に取付けられているバケット(ヘ)、(ヘ)・・・も走行することが出来る。
【0005】
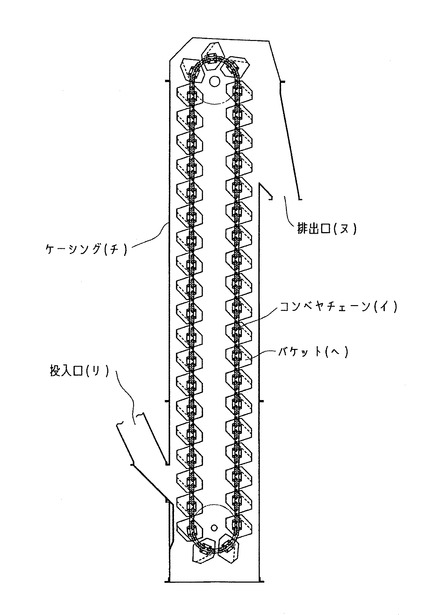
上記駆動スプロケット(ニ)、従動スプロケット(ホ)、及びコンベヤチェーン(イ)、(イ)はケーシング(チ)の内部に収容され、該ケーシング(チ)の下端部には投入口(リ)が設けられ、ケーシング(チ)の上端部には排出口(ヌ)が設けられている。そこで、投入口(リ)から投入された粒状物や粉状物は循環して走行するバケット(ヘ)、(ヘ)・・・に収容され、又一部はケーシング(チ)の下端に溜まるが、溜まった粒状物や粉状物は走行するバケット(ヘ)、(ヘ)・・・に掬われて上昇し、上端部でバケット(ヘ)、(ヘ)・・・が反転することで排出口(ヌ)から排出される。
【0006】
ところで、従動軸(ハ)は所定の位置に拘束されることなく、従動軸(ハ)が軸支される軸受け(ル)、(ル)はガイドレール(オ)、(オ)に沿って降下することが出来る支持構造と成っている。すなわち、コンベヤチェーン(イ)、(イ)の伸びに追従して従動軸(ハ)の軸受け(ル)、(ル)は自重の作用で降下することが出来、コンベヤチェーン(イ)、(イ)はダブ付くことなく緊張状態が保たれている。
【0007】
これらの点は一般的な縦型のバケットコンベヤの説明であるが、水平型のバケットコンベヤであっても基本的な構造は共通している。ところで、チェーンコンベヤを構成しているコンベヤチェーンは伸びを生じるが、従動軸(ハ)が該伸びに追従して移動することで対処している。しかし、コンベヤチェーン(イ)と駆動スプロケット(ニ)又は従動スプロケット(ホ)との噛み合いに異常を生じると該スプロケットの回転が変化する。
【0008】
そして、伸びて強度が低下したコンベヤチェーン(イ)は過負荷になったならば切断する虞がある。又、コンベヤチェーン(イ)と駆動スプロケット(ニ)又は従動スプロケット(ホ)との間に物が噛み込んだ時もスプロケット回転に変化が生じ、さらにコンベヤチェーン(イ)の内リンクと外リンク間に物が挟まって屈曲し難く成った時も該スプロケット回転に変化が生じる。
【発明の開示】
【発明が解決しようとする課題】
【0009】
このようにバケットコンベヤのスプロケット回転に変化が生じた状態で稼動し続けるならば、コンベヤチェーンが切断して大きな事故を招く虞がある。本発明が解決しようとする課題はこの問題点であり、コンベヤチェーンの切断はもとより、バケットコンベヤ全体の駆動異常を検知することが出来るように機能することが出来る従動軸回転検出装置を提供する。
【課題を解決するための手段】
【0010】
本発明は駆動軸ではなく従動軸の回転を検出して、その回転に現れる異常を知ることが出来るように構成する。そこで、バケットコンベヤのケーシング外に近接スイッチ(近接検出器)を取付け、従動軸に取着した回転検出体の回転変動を検出することが出来る。ここで、回転検出体は一定半径上で円周方向に等間隔で穴又は空間を形成したものであり、回転検出体が従動軸と共に回転することで穴又は空間が通過する時間の間隔を検出するようにしている。
【0011】
回転検出体の具体的な形状は限定せず、又回転検出体に形成される穴や空間の形状も自由である。そして、回転検出体の回転速度の変化を検出する為に近接検出器を対向して配置し、穴や空間を通過する時間を検出する。回転検出体を従動軸のケーシング内に取付けるならば、近接検出器はケーシング側板より外側に配置されるが、開口した窓には樹脂などの非磁性体を材質とした気密蓋を通して回転検出体の回転を検出する。
【発明の効果】
【0012】
本発明の回転検出体はバケットコンベヤの従動軸に取付けられ、この回転検出体の回転速度の変化を近接検出器にて検出することが出来る。従って、コンベヤチェーンが切断した場合は勿論のこと、その他のトラブルで従動軸の回転速度が変化する場合、近接検出器はこの回転速度の変化を即座に検出してバケットコンベヤの運転を停止させることが出来る。すなわち、大きな事故が発生する前に運転を停止して事故発生を防止出来る。
【0013】
一方、縦型のバケットコンベヤの場合であれば、回転検出体に対して近接検出器の取付け位置を中心から上側又は下側とすることで、コンベヤチェーンの伸びを知ることが出来る。すなわち、回転検出体に形成する穴や空間の形状を中心からの距離によりその周長が変化するようにすれば、回転検出体の位置が降下することで、穴を通過する時間が違ってくる。この通過時間の変化を知ることでコンベヤチェーンの伸びを演算できる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る従動軸回転検出装置を備えたバケットコンベヤの正面図。
【図2】本発明に係る従動軸回転検出装置を備えたバケットコンベヤの側面図。
【図3】従動軸回転検出装置の正面図。
【図4】従動軸回転検出装置の側面図。
【図5】従動軸回転検出装置を構成する近接検出器の正面図。
【図6】従動軸回転検出装置を構成する近接検出器の側面図。
【図7】回転検出体の具体例。
【図8】一般的なバケットコンベヤの正面図。
【図9】一般的なバケットコンベヤの側面図。
【発明を実施するための形態】
【0015】
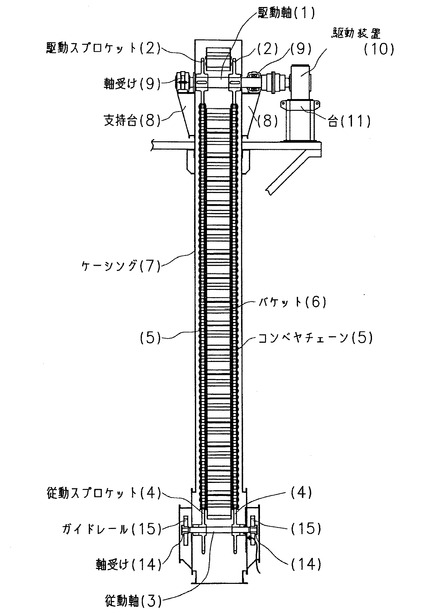
図1、図2は本発明に係る従動軸回転検出装置を備えた縦型のバケットコンベヤを示す実施例である。その基本構造は前記図8に示したバケットコンベヤと共通し、駆動軸1には所定の間隔をおいて両駆動スプロケット2,2が取着され、従動軸3には両従動スプロケット4,4が取付けられている。
【0016】
そして、これら駆動スプロケット2,2と従動スプロケット4,4にはコンベヤチェーン5,5が夫々巻き掛けされ、両コンベヤチェーン5,5に跨って複数のバケット6,6・・・が一定ピッチで取付けられている。上記駆動軸1はケーシング7に設けた支持台8,8に固定した軸受け9,9に軸支され、台11に取着した駆動装置10によって回転することが出来る。そして、該駆動装置10によって駆動軸1が回転するならば駆動スプロケット2,2が回ってコンベヤチェーン5,5は走行・循環する。同時にコンベヤチェーン5,5に取付けられているバケット6,6・・・も走行することが出来る。
【0017】
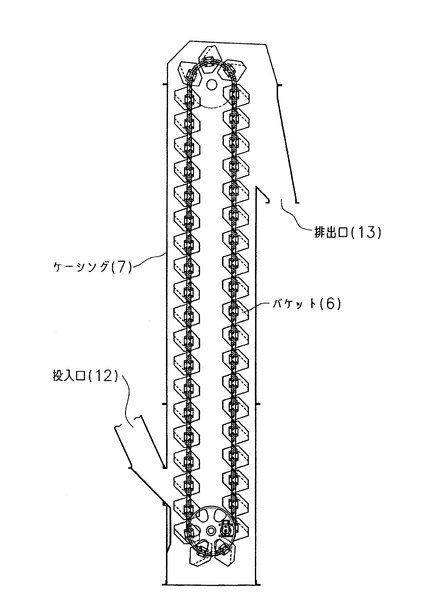
上記駆動スプロケット2,2、従動スプロケット4,4、及びコンベヤチェーン5,5はケーシング7の内部に収容され、該ケーシング7の下端部には投入口12が設けられ、ケーシング7の上端部には排出口13が設けられている。そこで、投入口12から投入された粒状物や粉状物は循環して走行するバケット6,6・・・に収容され、一部はケーシング7の下端に溜まるが、溜まった粒状物や粉状物は走行するバケット6,6・・・に掬われて上昇し、上端部でバケット6,6・・・が反転することで排出口13から排出される。
【0018】
ところで、従動軸3は所定の位置に拘束されることなく、該従動軸3が軸支される軸受け14,14はガイドレール15,15に沿って降下することが出来る支持構造と成っている。すなわち、コンベヤチェーン5,5の伸びに追従して従動軸3の軸受け14,14は自重の作用で降下することが出来、コンベヤチェーン5,5はダブ付くことなく常に緊張状態が保たれている。又、必要に応じてこの自重を増す為に従動軸14に重りを付加することもある。
【0019】
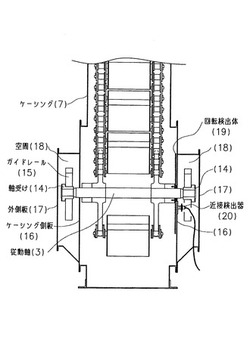
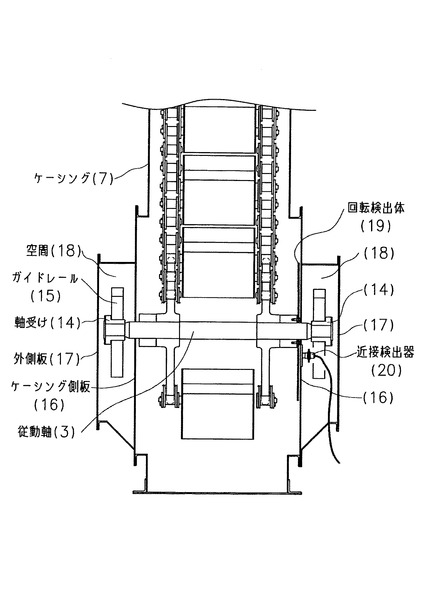
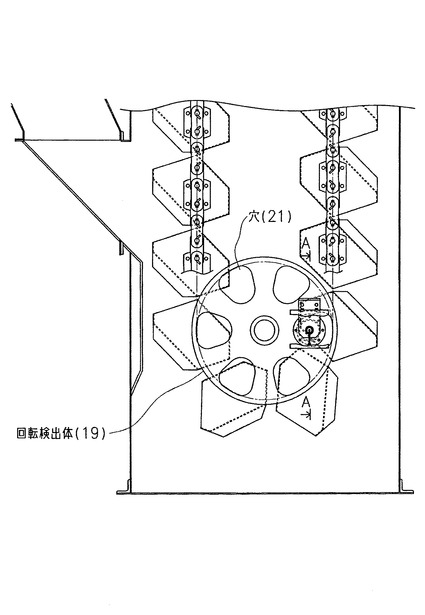
図3、図4はバケットコンベヤの下端部を表し、下端部には本発明に係る従動軸回転検出装置が取付けられている。従動軸3はその両先端部がケーシング7のケーシング側板16,16に形成した開口部を貫通して突出し、該ケーシング側板16,16の外側に配置している軸受け14,14に軸支されている。そして、軸受け14,14はガイドレール15,15にガイドされて上下方向に昇降動することが出来る。
【0020】
該ケーシング側板16,16の外側には外側板17,17が設けられると共に上下板にて閉じられ、この空間18,18に上記ガイドレール15,15を設けて軸受け14,14がガイドされている。そして、従動軸3には回転検出体19が取付けられ、該回転検出体19は従動軸3と共に回転することが出来、この回転検出体19の回転状況を近接検出器20によって検出することが出来る。
【0021】
回転検出体19は図4に示すように円板を成し、そして円板外周部には穴21,21・・・が一定半径上で等間隔で貫通して設けられている。近接検出器20は該穴21の位置に配置され、従動軸3と共に回転検出体19が回転することで穴21,21・・・が通過する時間的間隔を検出することが出来るように成っている。
【0022】
近接検出器(近接スイッチ)は発振回路の一部であるコイルから交流磁界を連続して放出しており、金属体がそれに近づくならば金属体内に渦電流が発生し、そのエネルギー分だけ発振が低下する。そこで、この発振の低下が所定の基準以下になれば検出体有りと判断することが出来るように機能する。そこで、穴21,21・・・を外周部に貫通した回転検出体19が一定速度で回転するならば、該穴21,21・・・の通過時間を検出できる。
【0023】
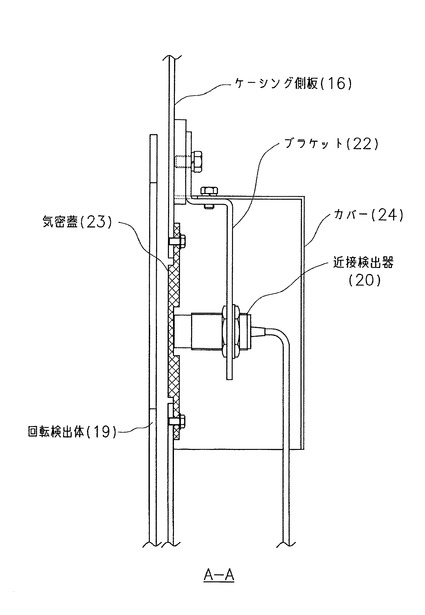
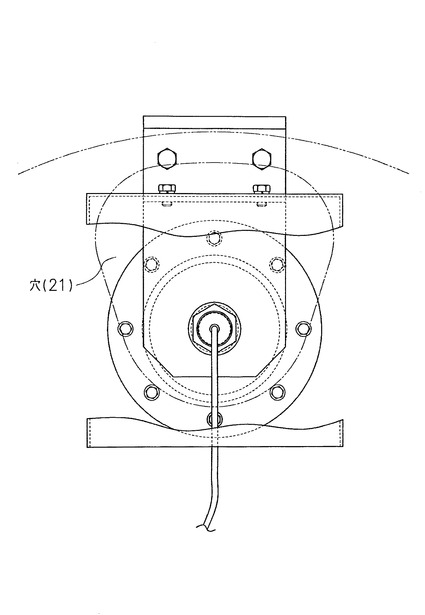
図5、図6は近接検出器20が取付けられている部分の詳細図を示している。該近接検出器20はケーシング側板16にネジ止めしたブラケット22に取付けられ、回転検出体19と所定の距離をおいて対向している。そして、ケーシング側板16には窓が形成され、この窓には樹脂製の気密蓋23が取付けられて該窓を塞いでいる。又、ブラケット22にはカバー24が取付けられて、近接検出器20を被覆している。
【0024】
近接検出器20から放出される交流磁界は樹脂製の気密蓋23を通過して回転検出体19に達し、穴21を通過する時間が検出(計測)される。すなわち、何らかの原因で回転検出体19の回転速度が変化するならば、穴21,21・・・を通過する時間は一定でなく増減する。穴21,21・・・の通過時間に増減が発生したならば、従動軸3の回転にトラブル有りと判断される。
【0025】
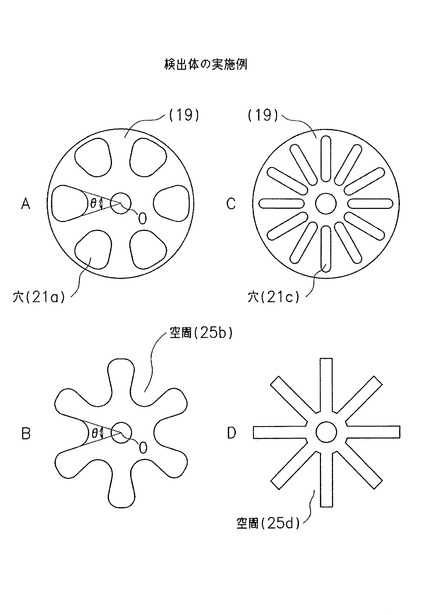
図7は回転検出体19を示す具体例である。同図の(A)、(C)は円板形を示し、(B)、(D)は概略星形を成している。(A)に示す円板形の回転検出体19は前記図4に示したバケットコンベヤに取付けた回転検出体19と同じであり、穴21aの形状は概略扇形をしている。すなわち、回転検出体19の中心Oに対して角度θ内に収まった扇形をしており、穴21aを通過する時間は近接検出器20の位置が中心Oからの半径に関わらず一定となる。
【0026】
(C)に示す回転検出体19では、複数の穴21c,21c・・・が放射状に延びているが、該穴21c,21c・・・の形状は長円を成している。(B)に示す概略星形の回転検出体19は外周が開口した空間25b,25b・・・を形成し、空間25bの形状は中心Oに対して角度θ内に収まっている概略扇形をしている。同じく(D)に示す回転検出体19の場合も概略星形をしており、穴25d,25d・・・は外周が開口している。
【0027】
ところで、これら回転検出体19が従動軸3と共に同速で回転する場合、(A)、(B)に示す回転検出体19では、近接検出器20の位置が内径側であっても外径側であっても穴21を通過する時間は同じである。これに対して(C)、(D)に示す回転検出体19では、近接検出体20の位置が内径側と外径側とでは違ってくる。しかし、何れの回転検出体19であっても従動軸3の回転速度に変化が発生するならば、回転検出体19の位置が内径側であっても外径側であっても回転速度の変化を検出することが出来る。
【0028】
本発明の回転検出体19は従動軸3の回転速度の変化を検出出来るが、コンベヤチェーン5の伸びを知ることも可能である。この場合には近接検出器20を回転検出体19の中心に対し、縦型のバケットコンベヤであるならば上側又は下側に配置される。そこで、コンベヤチェーン5が伸びる場合、従動軸3及び回転検出体19が降下し、近接検出器20と回転中心Oの距離が変化する。
【0029】
このように回転検出体19の位置が変化することで、穴21を通過する時間に変化が現れる。ただし、図7において穴21の形状が中心Oを基点とした扇形の穴21a、21a・・・を形成した(A)の回転検出体19、及び中心Oを基点として外周を開口した空間25b,25b・・・を有す(B)の回転検出体19の場合には、穴21a,21a・・・、空間25b,25b・・・を通過する時間に変化はない。
【0030】
従って、コンベヤチェーン5の伸びも同時に検出する為には、図7の(C)、(D)に示す回転検出体19でなくてはならない。すなわち、(C)、(D)の回転検出体19に形成している穴21c,21c・・・、空間25d,25d・・・は中心Oを基点とした扇形ではなく、回転検出体19の回転中心Oの位置が変化することでこれら穴21c,21c・・・、空間25d,25d・・・を通過する時間が変わる。
【0031】
例えば、近接検出器20を回転検出体19の中心Oに対して下側に配置した場合であれば、コンベヤチェーン5が伸びて回転検出体19が降下するならば、穴21c,21c・・・、空間25d,25d・・・を通過する時間が長くなり、逆に上側に配置した場合であれば穴21c,21c・・・、空間25d,25d・・・を通過する時間は短くなる。従って、この通過時間の長さでコンベヤチェーン5の伸びを演算することが可能である。
【0032】
ところで、図1に示したバケットコンベヤは縦型であるが、水平に延びる横型のバケットコンベヤとすることも出来る。この場合には、コンベヤチェーンの伸びに対して自重で従動軸3が降下することは出来ない為に、チェーンテンショナ装置が取付けられる。
【符号の説明】
【0033】
1 駆動軸
2 駆動スプロケット
3 従動軸
4 従動スプロケット
5 コンベヤチェーン
6 バケット
7 ケーシング
8 支持台
9 軸受け
10 駆動装置
11 台
12 投入口
13 排出口
14 軸受け
15 ガイドレール
16 ケーシング側板
17 外側板
18 空間
19 回転検出体
20 近接検出器
21 穴
22 ブラケット
23 気密蓋
24 カバー
25 空間
【技術分野】
【0001】
本発明はバケットコンベヤにおいて、ケーシングの外部から従動軸の回転変動を検出する装置に関するものである。
【背景技術】
【0002】
バケットコンベヤとは駆動軸と従動軸に取着したスプロケットにコンベヤチェーンを巻き掛けし、該コンベヤチェーンには物を搬送する為の複数のバケットが一定間隔で取付けられている。そして該バケットには搬送される粒状物や粉状物が投入口から入れられ、排出口から排出される。
【0003】
図8、図9は従来の一般的な縦型のバケットコンベヤ装置を示している概略図である。同図の(イ)はコンベヤチェーン、(ロ)は駆動軸、(ハ)は従動軸、(ニ)は駆動スプロケット、(ホ)は従動スプロケットを夫々表している。駆動軸(ロ)には所定の間隔をおいて両駆動スプロケット(ニ)、(ニ)が取着され、従動軸(ハ)には両従動スプロケット(ホ)、(ホ)が取付けられている。
【0004】
そして、これら駆動スプロケット(ニ)、(ニ)と従動スプロケット(ホ)、(ホ)にはコンベヤチェーン(イ)、(イ)が夫々巻き掛けされ、両コンベヤチェーン(イ)、(イ)に跨って複数のバケット(ヘ)、(ヘ)・・・が一定ピッチで取付けられている。上記駆動軸(ロ)は軸受けに支持され、駆動装置(ト)によって回転することが出来、駆動軸(ロ)が回転するならば駆動スプロケット(ニ)、(ニ)が回ってコンベヤチェーン(イ)、(イ)は走行する。同時にコンベヤチェーン(イ)、(イ)に取付けられているバケット(ヘ)、(ヘ)・・・も走行することが出来る。
【0005】
上記駆動スプロケット(ニ)、従動スプロケット(ホ)、及びコンベヤチェーン(イ)、(イ)はケーシング(チ)の内部に収容され、該ケーシング(チ)の下端部には投入口(リ)が設けられ、ケーシング(チ)の上端部には排出口(ヌ)が設けられている。そこで、投入口(リ)から投入された粒状物や粉状物は循環して走行するバケット(ヘ)、(ヘ)・・・に収容され、又一部はケーシング(チ)の下端に溜まるが、溜まった粒状物や粉状物は走行するバケット(ヘ)、(ヘ)・・・に掬われて上昇し、上端部でバケット(ヘ)、(ヘ)・・・が反転することで排出口(ヌ)から排出される。
【0006】
ところで、従動軸(ハ)は所定の位置に拘束されることなく、従動軸(ハ)が軸支される軸受け(ル)、(ル)はガイドレール(オ)、(オ)に沿って降下することが出来る支持構造と成っている。すなわち、コンベヤチェーン(イ)、(イ)の伸びに追従して従動軸(ハ)の軸受け(ル)、(ル)は自重の作用で降下することが出来、コンベヤチェーン(イ)、(イ)はダブ付くことなく緊張状態が保たれている。
【0007】
これらの点は一般的な縦型のバケットコンベヤの説明であるが、水平型のバケットコンベヤであっても基本的な構造は共通している。ところで、チェーンコンベヤを構成しているコンベヤチェーンは伸びを生じるが、従動軸(ハ)が該伸びに追従して移動することで対処している。しかし、コンベヤチェーン(イ)と駆動スプロケット(ニ)又は従動スプロケット(ホ)との噛み合いに異常を生じると該スプロケットの回転が変化する。
【0008】
そして、伸びて強度が低下したコンベヤチェーン(イ)は過負荷になったならば切断する虞がある。又、コンベヤチェーン(イ)と駆動スプロケット(ニ)又は従動スプロケット(ホ)との間に物が噛み込んだ時もスプロケット回転に変化が生じ、さらにコンベヤチェーン(イ)の内リンクと外リンク間に物が挟まって屈曲し難く成った時も該スプロケット回転に変化が生じる。
【発明の開示】
【発明が解決しようとする課題】
【0009】
このようにバケットコンベヤのスプロケット回転に変化が生じた状態で稼動し続けるならば、コンベヤチェーンが切断して大きな事故を招く虞がある。本発明が解決しようとする課題はこの問題点であり、コンベヤチェーンの切断はもとより、バケットコンベヤ全体の駆動異常を検知することが出来るように機能することが出来る従動軸回転検出装置を提供する。
【課題を解決するための手段】
【0010】
本発明は駆動軸ではなく従動軸の回転を検出して、その回転に現れる異常を知ることが出来るように構成する。そこで、バケットコンベヤのケーシング外に近接スイッチ(近接検出器)を取付け、従動軸に取着した回転検出体の回転変動を検出することが出来る。ここで、回転検出体は一定半径上で円周方向に等間隔で穴又は空間を形成したものであり、回転検出体が従動軸と共に回転することで穴又は空間が通過する時間の間隔を検出するようにしている。
【0011】
回転検出体の具体的な形状は限定せず、又回転検出体に形成される穴や空間の形状も自由である。そして、回転検出体の回転速度の変化を検出する為に近接検出器を対向して配置し、穴や空間を通過する時間を検出する。回転検出体を従動軸のケーシング内に取付けるならば、近接検出器はケーシング側板より外側に配置されるが、開口した窓には樹脂などの非磁性体を材質とした気密蓋を通して回転検出体の回転を検出する。
【発明の効果】
【0012】
本発明の回転検出体はバケットコンベヤの従動軸に取付けられ、この回転検出体の回転速度の変化を近接検出器にて検出することが出来る。従って、コンベヤチェーンが切断した場合は勿論のこと、その他のトラブルで従動軸の回転速度が変化する場合、近接検出器はこの回転速度の変化を即座に検出してバケットコンベヤの運転を停止させることが出来る。すなわち、大きな事故が発生する前に運転を停止して事故発生を防止出来る。
【0013】
一方、縦型のバケットコンベヤの場合であれば、回転検出体に対して近接検出器の取付け位置を中心から上側又は下側とすることで、コンベヤチェーンの伸びを知ることが出来る。すなわち、回転検出体に形成する穴や空間の形状を中心からの距離によりその周長が変化するようにすれば、回転検出体の位置が降下することで、穴を通過する時間が違ってくる。この通過時間の変化を知ることでコンベヤチェーンの伸びを演算できる。
【図面の簡単な説明】
【0014】
【図1】本発明に係る従動軸回転検出装置を備えたバケットコンベヤの正面図。
【図2】本発明に係る従動軸回転検出装置を備えたバケットコンベヤの側面図。
【図3】従動軸回転検出装置の正面図。
【図4】従動軸回転検出装置の側面図。
【図5】従動軸回転検出装置を構成する近接検出器の正面図。
【図6】従動軸回転検出装置を構成する近接検出器の側面図。
【図7】回転検出体の具体例。
【図8】一般的なバケットコンベヤの正面図。
【図9】一般的なバケットコンベヤの側面図。
【発明を実施するための形態】
【0015】
図1、図2は本発明に係る従動軸回転検出装置を備えた縦型のバケットコンベヤを示す実施例である。その基本構造は前記図8に示したバケットコンベヤと共通し、駆動軸1には所定の間隔をおいて両駆動スプロケット2,2が取着され、従動軸3には両従動スプロケット4,4が取付けられている。
【0016】
そして、これら駆動スプロケット2,2と従動スプロケット4,4にはコンベヤチェーン5,5が夫々巻き掛けされ、両コンベヤチェーン5,5に跨って複数のバケット6,6・・・が一定ピッチで取付けられている。上記駆動軸1はケーシング7に設けた支持台8,8に固定した軸受け9,9に軸支され、台11に取着した駆動装置10によって回転することが出来る。そして、該駆動装置10によって駆動軸1が回転するならば駆動スプロケット2,2が回ってコンベヤチェーン5,5は走行・循環する。同時にコンベヤチェーン5,5に取付けられているバケット6,6・・・も走行することが出来る。
【0017】
上記駆動スプロケット2,2、従動スプロケット4,4、及びコンベヤチェーン5,5はケーシング7の内部に収容され、該ケーシング7の下端部には投入口12が設けられ、ケーシング7の上端部には排出口13が設けられている。そこで、投入口12から投入された粒状物や粉状物は循環して走行するバケット6,6・・・に収容され、一部はケーシング7の下端に溜まるが、溜まった粒状物や粉状物は走行するバケット6,6・・・に掬われて上昇し、上端部でバケット6,6・・・が反転することで排出口13から排出される。
【0018】
ところで、従動軸3は所定の位置に拘束されることなく、該従動軸3が軸支される軸受け14,14はガイドレール15,15に沿って降下することが出来る支持構造と成っている。すなわち、コンベヤチェーン5,5の伸びに追従して従動軸3の軸受け14,14は自重の作用で降下することが出来、コンベヤチェーン5,5はダブ付くことなく常に緊張状態が保たれている。又、必要に応じてこの自重を増す為に従動軸14に重りを付加することもある。
【0019】
図3、図4はバケットコンベヤの下端部を表し、下端部には本発明に係る従動軸回転検出装置が取付けられている。従動軸3はその両先端部がケーシング7のケーシング側板16,16に形成した開口部を貫通して突出し、該ケーシング側板16,16の外側に配置している軸受け14,14に軸支されている。そして、軸受け14,14はガイドレール15,15にガイドされて上下方向に昇降動することが出来る。
【0020】
該ケーシング側板16,16の外側には外側板17,17が設けられると共に上下板にて閉じられ、この空間18,18に上記ガイドレール15,15を設けて軸受け14,14がガイドされている。そして、従動軸3には回転検出体19が取付けられ、該回転検出体19は従動軸3と共に回転することが出来、この回転検出体19の回転状況を近接検出器20によって検出することが出来る。
【0021】
回転検出体19は図4に示すように円板を成し、そして円板外周部には穴21,21・・・が一定半径上で等間隔で貫通して設けられている。近接検出器20は該穴21の位置に配置され、従動軸3と共に回転検出体19が回転することで穴21,21・・・が通過する時間的間隔を検出することが出来るように成っている。
【0022】
近接検出器(近接スイッチ)は発振回路の一部であるコイルから交流磁界を連続して放出しており、金属体がそれに近づくならば金属体内に渦電流が発生し、そのエネルギー分だけ発振が低下する。そこで、この発振の低下が所定の基準以下になれば検出体有りと判断することが出来るように機能する。そこで、穴21,21・・・を外周部に貫通した回転検出体19が一定速度で回転するならば、該穴21,21・・・の通過時間を検出できる。
【0023】
図5、図6は近接検出器20が取付けられている部分の詳細図を示している。該近接検出器20はケーシング側板16にネジ止めしたブラケット22に取付けられ、回転検出体19と所定の距離をおいて対向している。そして、ケーシング側板16には窓が形成され、この窓には樹脂製の気密蓋23が取付けられて該窓を塞いでいる。又、ブラケット22にはカバー24が取付けられて、近接検出器20を被覆している。
【0024】
近接検出器20から放出される交流磁界は樹脂製の気密蓋23を通過して回転検出体19に達し、穴21を通過する時間が検出(計測)される。すなわち、何らかの原因で回転検出体19の回転速度が変化するならば、穴21,21・・・を通過する時間は一定でなく増減する。穴21,21・・・の通過時間に増減が発生したならば、従動軸3の回転にトラブル有りと判断される。
【0025】
図7は回転検出体19を示す具体例である。同図の(A)、(C)は円板形を示し、(B)、(D)は概略星形を成している。(A)に示す円板形の回転検出体19は前記図4に示したバケットコンベヤに取付けた回転検出体19と同じであり、穴21aの形状は概略扇形をしている。すなわち、回転検出体19の中心Oに対して角度θ内に収まった扇形をしており、穴21aを通過する時間は近接検出器20の位置が中心Oからの半径に関わらず一定となる。
【0026】
(C)に示す回転検出体19では、複数の穴21c,21c・・・が放射状に延びているが、該穴21c,21c・・・の形状は長円を成している。(B)に示す概略星形の回転検出体19は外周が開口した空間25b,25b・・・を形成し、空間25bの形状は中心Oに対して角度θ内に収まっている概略扇形をしている。同じく(D)に示す回転検出体19の場合も概略星形をしており、穴25d,25d・・・は外周が開口している。
【0027】
ところで、これら回転検出体19が従動軸3と共に同速で回転する場合、(A)、(B)に示す回転検出体19では、近接検出器20の位置が内径側であっても外径側であっても穴21を通過する時間は同じである。これに対して(C)、(D)に示す回転検出体19では、近接検出体20の位置が内径側と外径側とでは違ってくる。しかし、何れの回転検出体19であっても従動軸3の回転速度に変化が発生するならば、回転検出体19の位置が内径側であっても外径側であっても回転速度の変化を検出することが出来る。
【0028】
本発明の回転検出体19は従動軸3の回転速度の変化を検出出来るが、コンベヤチェーン5の伸びを知ることも可能である。この場合には近接検出器20を回転検出体19の中心に対し、縦型のバケットコンベヤであるならば上側又は下側に配置される。そこで、コンベヤチェーン5が伸びる場合、従動軸3及び回転検出体19が降下し、近接検出器20と回転中心Oの距離が変化する。
【0029】
このように回転検出体19の位置が変化することで、穴21を通過する時間に変化が現れる。ただし、図7において穴21の形状が中心Oを基点とした扇形の穴21a、21a・・・を形成した(A)の回転検出体19、及び中心Oを基点として外周を開口した空間25b,25b・・・を有す(B)の回転検出体19の場合には、穴21a,21a・・・、空間25b,25b・・・を通過する時間に変化はない。
【0030】
従って、コンベヤチェーン5の伸びも同時に検出する為には、図7の(C)、(D)に示す回転検出体19でなくてはならない。すなわち、(C)、(D)の回転検出体19に形成している穴21c,21c・・・、空間25d,25d・・・は中心Oを基点とした扇形ではなく、回転検出体19の回転中心Oの位置が変化することでこれら穴21c,21c・・・、空間25d,25d・・・を通過する時間が変わる。
【0031】
例えば、近接検出器20を回転検出体19の中心Oに対して下側に配置した場合であれば、コンベヤチェーン5が伸びて回転検出体19が降下するならば、穴21c,21c・・・、空間25d,25d・・・を通過する時間が長くなり、逆に上側に配置した場合であれば穴21c,21c・・・、空間25d,25d・・・を通過する時間は短くなる。従って、この通過時間の長さでコンベヤチェーン5の伸びを演算することが可能である。
【0032】
ところで、図1に示したバケットコンベヤは縦型であるが、水平に延びる横型のバケットコンベヤとすることも出来る。この場合には、コンベヤチェーンの伸びに対して自重で従動軸3が降下することは出来ない為に、チェーンテンショナ装置が取付けられる。
【符号の説明】
【0033】
1 駆動軸
2 駆動スプロケット
3 従動軸
4 従動スプロケット
5 コンベヤチェーン
6 バケット
7 ケーシング
8 支持台
9 軸受け
10 駆動装置
11 台
12 投入口
13 排出口
14 軸受け
15 ガイドレール
16 ケーシング側板
17 外側板
18 空間
19 回転検出体
20 近接検出器
21 穴
22 ブラケット
23 気密蓋
24 カバー
25 空間
【特許請求の範囲】
【請求項1】
駆動軸と従動軸に取着したスプロケットにコンベヤチェーンを巻き掛けし、該コンベヤチェーンには複数のバケットを等間隔で取付けたバケットコンベヤであって、上記従動軸の回転速度を検出する為の従動軸回転検出装置において、従動軸には概略円板形又は概略星形の回転検出体を取付けると共に回転検出体には同一半径上に複数の穴又は空間を一定ピッチで形成し、該回転検出体に対向して近接検出器を配置し、この近接検出器にて回転検出体の回転速度の変化を検出することを特徴とするバケットコンベヤの従動軸回転検出装置。
【請求項2】
上記回転検出体をケーシング側板内の従動軸に取付け、近接検出器はケーシング側板に設けた窓に取付けた非磁性体を材質とした気密蓋を間にして配置した請求項1記載のバケットコンベヤの従動軸回転検出装置。
【請求項3】
上記近接検出器を回転検出体の中心に対して駆動軸側に配置した請求項1、又は請求項2記載のバケットコンベヤの従動軸回転検出装置。
【請求項4】
上記近接検出器を回転検出体の中心に対して駆動軸より反対側に配置した請求項1、又は請求項2記載のバケットコンベヤの従動軸回転検出装置。
【請求項1】
駆動軸と従動軸に取着したスプロケットにコンベヤチェーンを巻き掛けし、該コンベヤチェーンには複数のバケットを等間隔で取付けたバケットコンベヤであって、上記従動軸の回転速度を検出する為の従動軸回転検出装置において、従動軸には概略円板形又は概略星形の回転検出体を取付けると共に回転検出体には同一半径上に複数の穴又は空間を一定ピッチで形成し、該回転検出体に対向して近接検出器を配置し、この近接検出器にて回転検出体の回転速度の変化を検出することを特徴とするバケットコンベヤの従動軸回転検出装置。
【請求項2】
上記回転検出体をケーシング側板内の従動軸に取付け、近接検出器はケーシング側板に設けた窓に取付けた非磁性体を材質とした気密蓋を間にして配置した請求項1記載のバケットコンベヤの従動軸回転検出装置。
【請求項3】
上記近接検出器を回転検出体の中心に対して駆動軸側に配置した請求項1、又は請求項2記載のバケットコンベヤの従動軸回転検出装置。
【請求項4】
上記近接検出器を回転検出体の中心に対して駆動軸より反対側に配置した請求項1、又は請求項2記載のバケットコンベヤの従動軸回転検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−260650(P2010−260650A)
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願番号】特願2009−110434(P2009−110434)
【出願日】平成21年4月30日(2009.4.30)
【出願人】(000207425)大同工業株式会社 (45)
【Fターム(参考)】
【公開日】平成22年11月18日(2010.11.18)
【国際特許分類】
【出願日】平成21年4月30日(2009.4.30)
【出願人】(000207425)大同工業株式会社 (45)
【Fターム(参考)】
[ Back to top ]