
バックラッシュ量算出方法および直動型ロボット装置
【課題】 上下軸に配置されたラックとピニオンにおいて、重力の影響を受けずバックラッシュ量を容易に精度よく測定できる方法および直動型ロボット装置を提供する。
【解決手段】 本発明の直動型ロボット装置のバックラッシュ量算出方法は、減速機7を有したサーボモータ6と、減速機の出力軸に結合されたピニオン3と、上下方向に設けられピニオンに噛合するラック2と、サーボモータを保持しラック上を移動する移動体8と、サーボモータに設けられたトルクおよび回転位置を検出する検出部と、サーボモータを制御する制御部とを備え、サーボモータを回転させて移動体を下方向に移動させ、移動体より下に設けた固定台5に移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の検出部の回転位置パルス値を用いることによりラックとピニオンのバックラッシュ量を算出するものである。
【解決手段】 本発明の直動型ロボット装置のバックラッシュ量算出方法は、減速機7を有したサーボモータ6と、減速機の出力軸に結合されたピニオン3と、上下方向に設けられピニオンに噛合するラック2と、サーボモータを保持しラック上を移動する移動体8と、サーボモータに設けられたトルクおよび回転位置を検出する検出部と、サーボモータを制御する制御部とを備え、サーボモータを回転させて移動体を下方向に移動させ、移動体より下に設けた固定台5に移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の検出部の回転位置パルス値を用いることによりラックとピニオンのバックラッシュ量を算出するものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液晶ガラス基板搬送用の上下軸などに設置されるラック&ピニオンのバックラッシュ測定方法とその機能を持つ直動型ロボット装置に関する。
【背景技術】
【0002】
従来の走行軸にラックとピニオンが配置された直動型ロボットのバックラッシュ測定の一般的な方法として、例えば走行軸のベースプレートにダイヤルゲージを設置し、モータユニット部の端面にダイヤルゲージを当て、モータの正転方向および逆転方向へモータユニット部を手で押し、ダイヤルゲージの振れ幅を見て行なっている。
また、ラックとピニオンを有した直線走行型ロボットのバックラッシュを除去する装置として、直線走行方向に対して交差させた方向に相対変位可能な遊動台を設けこの遊動台に押し付け力を与えてラックとピニオン噛合させる構成のものもある(例えば、特許文献1参照)
【特許文献1】特開平6−170760号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、従来のバックラッシュ測定方法では、モータユニット部を手で押して測定するという手順をとっているので、ラックとピニオンを上下軸へ配した場合に、重力の影響があって測定が容易でないという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、モータトルク値を利用してバックラッシュを測定し、ラックとピニオンが上下軸方向に設置された場合でもバックラッシュ測定を容易にかつ精度よくすることができる方法および直動型ロボット装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記問題を解決するため、本発明は、次のようにしたものである。
請求項1に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置のバックラッシュ量算出方法において、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出するものである。
請求項2に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、前記制御部に、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたものである。
請求項3に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを固定しガラス基板を保持し上下駆動するアーム部と、前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、前記制御部に、前記サーボモータを回転させて前記アーム部を下方向に移動させ、前記移動体より下に設けた固定台に前記アーム部を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたものである。
【発明の効果】
【0005】
請求項1に記載の発明によると、サーボモータのトルク値がゼロになったときからトルクの方向が逆転するまでの間の回転位置パルスによりバックラッシュ量が計算できるため、バックラッシュ測定の精度が向上する。
請求項2、3に記載の発明によると、アナライジングモニタおよびプログラミングペンダント上でモータトルク値およびパスル数を検出するため、移動体の重量の影響を受けずにバックラッシュを測定することができ、測定を容易にする。
【発明を実施するための最良の形態】
【0006】
以下、本発明の方法の具体的実施例について、図に基づいて説明する。
【実施例1】
【0007】
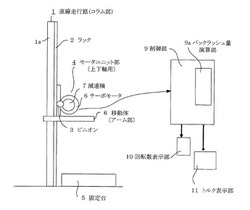
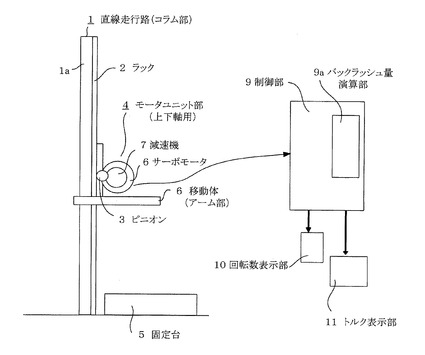
図1は、本発明の直動型ロボット装置の全体構成を示す側面図である。
図において、1はラック支持体、2はラック、3はピニオン、4はモータユニット部(上下軸用:U軸)、5は固定台、8は移動体(アーム部)、9は制御部(コントローラ)、9a バックラッシュ量演算部、10 回転数表示部(コントローラパネル)、11はトルク表示部(アナライジングモニタ)である。本発明の直動型ロボット装置は、移動体8が上下に移動する構造である。
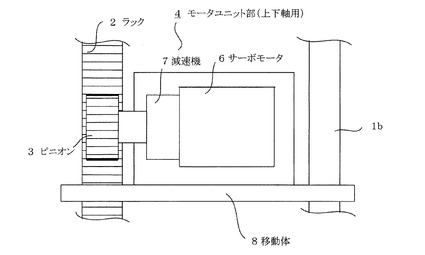
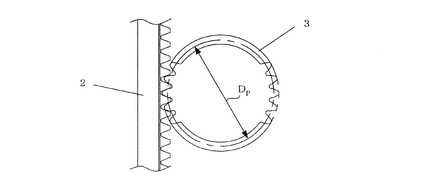
図2は、図1のモータユニット部4を示す部分拡大平面図である。図において、6はサーボモータ、7は減速機である。図3は、ラック2とピニオン3の噛合いを示す部分拡大図である。モータユニット部4は、ピニオン2とサーボモータ3と減速機4および移動体5により構成されている。サーボモータ3には図示しないモータの回転位置を検出するエンコーダとトルクを検出するトルク検出器が内蔵されている。なお、dpはラック2と噛み合うピニオン3のピッチ円直径である。
【0008】
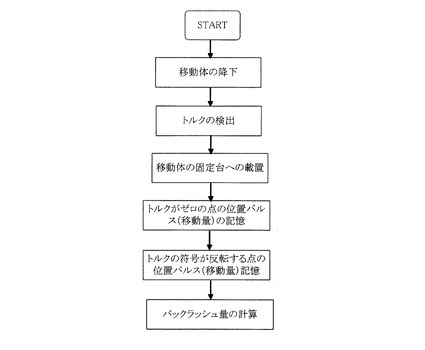
つぎに、本実施例の動作について説明する。図4、図5は、バックラッシュ量を計算する処理手順を示すフローチャート図である。
(1)まず、上下軸モータユニット部4を下降させる。
(2)トルク表示部(アナライジングモニタ)11によりモータトルクを測定する。
(3)モータユニット部4を固定台5に載せモータに作用するトルクを解放する。そして、このトルクがゼロになった時の位置のパルス値をメモリに記憶させ(録す)る。
(4)モータ回転を続行させ、モータのトルクの符号が逆転したときの位置のパルス値を記憶させる。
(5)バックラッシュ量演算部9aにより次式にパルス値を入力して、移動量(スキマ)ΔCcを計算する。
【0009】
【数1】

【0010】
Dv:分解能(パルス/deg)
αp:−側トルク発生時のU軸パルス
βp:+側トルク発生時のU軸パルス
i:総合減速比
dp:噛合ピッチ円直径
このように、アナライジングレコーダおよびプログラミングペンダントによってモータのトルク値およびパルスを検出する手順をとるため、容易にバックラッシュ量が測定できる。
【図面の簡単な説明】
【0011】
【図1】本発明の直動型ロボット装置の全体構成を示す側面図である。
【図2】図1のモータユニット部を示す部分拡大平面図である。
【図3】図1のラックとピニオンを示す部分拡大図である。
【図4】本発明のバックラッシュ測定の手順を示すフローチャートである。
【符号の説明】
【0012】
1 ラック支持体
2 ラック
3 ピニオン
4 モータユニット部(上下軸用)
5 固定台
6 サーボモータ
7 減速機
8 移動体(アーム部)
9 制御部(コントローラ)
9a バックラッシュ量演算部
10 回転数表示部(コントローラパネル)
11 トルク表示部(アナライジングモニタ)
【技術分野】
【0001】
本発明は、液晶ガラス基板搬送用の上下軸などに設置されるラック&ピニオンのバックラッシュ測定方法とその機能を持つ直動型ロボット装置に関する。
【背景技術】
【0002】
従来の走行軸にラックとピニオンが配置された直動型ロボットのバックラッシュ測定の一般的な方法として、例えば走行軸のベースプレートにダイヤルゲージを設置し、モータユニット部の端面にダイヤルゲージを当て、モータの正転方向および逆転方向へモータユニット部を手で押し、ダイヤルゲージの振れ幅を見て行なっている。
また、ラックとピニオンを有した直線走行型ロボットのバックラッシュを除去する装置として、直線走行方向に対して交差させた方向に相対変位可能な遊動台を設けこの遊動台に押し付け力を与えてラックとピニオン噛合させる構成のものもある(例えば、特許文献1参照)
【特許文献1】特開平6−170760号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが、従来のバックラッシュ測定方法では、モータユニット部を手で押して測定するという手順をとっているので、ラックとピニオンを上下軸へ配した場合に、重力の影響があって測定が容易でないという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、モータトルク値を利用してバックラッシュを測定し、ラックとピニオンが上下軸方向に設置された場合でもバックラッシュ測定を容易にかつ精度よくすることができる方法および直動型ロボット装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
上記問題を解決するため、本発明は、次のようにしたものである。
請求項1に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置のバックラッシュ量算出方法において、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出するものである。
請求項2に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、前記制御部に、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたものである。
請求項3に記載の発明は、サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを固定しガラス基板を保持し上下駆動するアーム部と、前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、前記制御部に、前記サーボモータを回転させて前記アーム部を下方向に移動させ、前記移動体より下に設けた固定台に前記アーム部を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたものである。
【発明の効果】
【0005】
請求項1に記載の発明によると、サーボモータのトルク値がゼロになったときからトルクの方向が逆転するまでの間の回転位置パルスによりバックラッシュ量が計算できるため、バックラッシュ測定の精度が向上する。
請求項2、3に記載の発明によると、アナライジングモニタおよびプログラミングペンダント上でモータトルク値およびパスル数を検出するため、移動体の重量の影響を受けずにバックラッシュを測定することができ、測定を容易にする。
【発明を実施するための最良の形態】
【0006】
以下、本発明の方法の具体的実施例について、図に基づいて説明する。
【実施例1】
【0007】
図1は、本発明の直動型ロボット装置の全体構成を示す側面図である。
図において、1はラック支持体、2はラック、3はピニオン、4はモータユニット部(上下軸用:U軸)、5は固定台、8は移動体(アーム部)、9は制御部(コントローラ)、9a バックラッシュ量演算部、10 回転数表示部(コントローラパネル)、11はトルク表示部(アナライジングモニタ)である。本発明の直動型ロボット装置は、移動体8が上下に移動する構造である。
図2は、図1のモータユニット部4を示す部分拡大平面図である。図において、6はサーボモータ、7は減速機である。図3は、ラック2とピニオン3の噛合いを示す部分拡大図である。モータユニット部4は、ピニオン2とサーボモータ3と減速機4および移動体5により構成されている。サーボモータ3には図示しないモータの回転位置を検出するエンコーダとトルクを検出するトルク検出器が内蔵されている。なお、dpはラック2と噛み合うピニオン3のピッチ円直径である。
【0008】
つぎに、本実施例の動作について説明する。図4、図5は、バックラッシュ量を計算する処理手順を示すフローチャート図である。
(1)まず、上下軸モータユニット部4を下降させる。
(2)トルク表示部(アナライジングモニタ)11によりモータトルクを測定する。
(3)モータユニット部4を固定台5に載せモータに作用するトルクを解放する。そして、このトルクがゼロになった時の位置のパルス値をメモリに記憶させ(録す)る。
(4)モータ回転を続行させ、モータのトルクの符号が逆転したときの位置のパルス値を記憶させる。
(5)バックラッシュ量演算部9aにより次式にパルス値を入力して、移動量(スキマ)ΔCcを計算する。
【0009】
【数1】
【0010】
Dv:分解能(パルス/deg)
αp:−側トルク発生時のU軸パルス
βp:+側トルク発生時のU軸パルス
i:総合減速比
dp:噛合ピッチ円直径
このように、アナライジングレコーダおよびプログラミングペンダントによってモータのトルク値およびパルスを検出する手順をとるため、容易にバックラッシュ量が測定できる。
【図面の簡単な説明】
【0011】
【図1】本発明の直動型ロボット装置の全体構成を示す側面図である。
【図2】図1のモータユニット部を示す部分拡大平面図である。
【図3】図1のラックとピニオンを示す部分拡大図である。
【図4】本発明のバックラッシュ測定の手順を示すフローチャートである。
【符号の説明】
【0012】
1 ラック支持体
2 ラック
3 ピニオン
4 モータユニット部(上下軸用)
5 固定台
6 サーボモータ
7 減速機
8 移動体(アーム部)
9 制御部(コントローラ)
9a バックラッシュ量演算部
10 回転数表示部(コントローラパネル)
11 トルク表示部(アナライジングモニタ)
【特許請求の範囲】
【請求項1】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置のバックラッシュ量算出方法において、
前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出することを特徴とする直動型ロボット装置のバックラッシュ量算出方法。
【請求項2】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、
前記制御部に、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたことを特徴とする直動型ロボット装置。
【請求項3】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを固定しガラス基板を保持し上下駆動するアーム部と、前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、
前記制御部に、前記サーボモータを回転させて前記アーム部を下方向に移動させ、前記移動体より下に設けた固定台に前記アーム部を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたことを特徴とする液晶ガラス基板搬送用の直動型ロボット装置。
【請求項1】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置のバックラッシュ量算出方法において、
前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けてトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出することを特徴とする直動型ロボット装置のバックラッシュ量算出方法。
【請求項2】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを保持し前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、
前記制御部に、前記サーボモータを回転させて前記移動体を下方向に移動させ、前記移動体より下に設けた固定台に前記移動体を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたことを特徴とする直動型ロボット装置。
【請求項3】
サーボモータと、これに結合された減速機と、前記減速機の出力軸に結合されたピニオンと、上下方向に設けられ前記ピニオンに噛合するラックと、前記サーボモータを固定しガラス基板を保持し上下駆動するアーム部と、前記ラック上を移動する移動体と、前記サーボモータに設けられたトルクおよび回転位置を検出する検出部と、前記サーボモータを制御する制御部とを備えた直動型ロボット装置において、
前記制御部に、前記サーボモータを回転させて前記アーム部を下方向に移動させ、前記移動体より下に設けた固定台に前記アーム部を預けて前記検出部のトルクがゼロになったときからトルクの方向が逆転するまでの間の前記検出部の回転位置パルス値を用いることにより前記ラックとピニオンのバックラッシュ量を算出する演算部を設けたことを特徴とする液晶ガラス基板搬送用の直動型ロボット装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−198203(P2009−198203A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−37572(P2008−37572)
【出願日】平成20年2月19日(2008.2.19)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月19日(2008.2.19)
【出願人】(000006622)株式会社安川電機 (2,482)
【Fターム(参考)】
[ Back to top ]