
バランス検査方法、及びバランス検査装置
【課題】プロペラその他の回転体を安定した状態でバランス検査を行う。
【解決手段】プロペラの静的バランスを検査するバランス検査である。水平姿勢にしたプロペラ11を積載テーブル2に載せ、上記中心軸位置で下側から球面軸受4,6を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記プロペラの静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出する。
【解決手段】プロペラの静的バランスを検査するバランス検査である。水平姿勢にしたプロペラ11を積載テーブル2に載せ、上記中心軸位置で下側から球面軸受4,6を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記プロペラの静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プロペラやファンなどの翼体を備えた回転体の静的バランスを検査するバランス検査方法及びバランス検査装置に関する。特に、大型な回転体や質量が重い回転体に有効な技術である。
【背景技術】
【0002】
プロペラの静的バランス検査方法としては、例えば特許文献1に記載の技術がある。この検査方法は、平行な一対の水平レールに案内支持させるように、プロペラを起立させ回転軸を取り付けてから、一方のプロペラの羽根部に重錘を着けて少し回転させ同プロペラの羽根部先端の低下する方向への回転を始めるのに必要な最小の第1モーメントを検出すると共に、他方のプロペの羽根部に重錘を着けて少し逆回転させ同プロペラの羽根部先端の低下する方向への回転を始めるのに必要な最小の第2モーメントを検出し、その検出した第1及び第2モーメントからアンバランス量を計測するものである。
【0003】
また、動的バランス検査方法としては、例えば特許文献2,3に記載の技術がある。この検査方法は、検査する回転体を回転中心で回転自在、揺動自在に支持できるように静圧球面軸受を配して、上記検査する回転体の回転駆動時の荷重変動を計測してアンバランス量を計測するものである。
【特許文献1】特開平2−232542号公報
【特許文献2】特開昭62−226032号公報
【特許文献3】特開昭62−34029号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記従来技術である特許文献1では、プロペラを起立した姿勢で吊り上げて、一対のレール間に転動可能に設置する必要があるが、この作業は時間が掛かって作業性が悪い。
また、プロペラをレールに沿って回転可能な不安定な状態としてのバランス検査となり、また、設置した後も重錘を何度も着け替える作業が発生すると共に、重錘を付ける度に回動変位させる必要があることから時間も掛かる。すなわち、従来のバランス検査方法にあっては、少しずつ回転させながら周方向に沿ったバランス状態を順次、検査する必要があり、手間と時間が掛かる。
【0005】
また、特許文献2,3では検査する回転体を回転しつつ、その回転時に計測される荷重変動からバランス検査が行われるため、検査する回転体の回転中心に対する芯出し精度がバランス検査精度に大きな影響を与える。
以上のような課題は、バランス検査を行うプロペラ等の回転体が大型化かつ重くなるほど顕著なものとなる。
本発明は、このような点に着目してなされたもので、プロペラその他の回転体を安定した状態でバランス検査を行えること課題としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のうち請求項1に記載の発明は、放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査方法であって、
水平姿勢にした上記回転体を、上記中心軸位置で下側から球面軸受を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記回転体の静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出することを特徴とするものである。
【0007】
次に、請求項2に記載した発明は、請求項1に記載した構成に対し、平面視における上記球面軸受の揺動中心位置と回転体の中心軸との偏差に基づき上記検出するアンバランス量を補正することを特徴とするものである。
次に、請求項3に記載した発明は、放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査装置であって、
水平姿勢にして上記回転体を載置する支持架台と、支持架台に載置された上記回転体の中心軸位置で揺動可能に当該支持架台を下側から球面軸受で支持する軸支部と、上記球面軸受の軸受面間に潤滑剤を圧入して上記支持架台を浮上支持状態とする浮上手段と、上記回転体を載せた支持架台の傾き状態若しくは荷重バランスに基づき上記回転体のアンバランス量を検出するアンバランス量検出手段と、を備えることを特徴とするものである。
【0008】
次に、請求項4に記載した発明は、請求項3に記載した構成に対し、支持架台に載置された回転体の中心軸と、球面軸受の揺動中心位置との平面視における偏心量を測定する測定手段を設け、上記アンバランス量検出手段は、該測定手段が測定した偏心量に基づきアンバランス量を補正することを特徴とするものである。
次に、請求項5に記載した発明は、請求項3又は請求項4に記載した構成に対し、上記支持架台の載置面が水平若しくは略水平になるように、支持架台に下から当接して当該支持架台を支持する複数のサポート部と、球面軸受の外周側に位置して上記回転体を載置した支持架台の複数位置での荷重を検出する複数の荷重検出手段とを備え、
上記アンバランス量検出手段は、上記複数の荷重検出手段の検出値に基づきアンバランス量を検出することを特徴とするものである。
【0009】
次に、請求項6に記載した発明は、請求項5に記載した構成に対し、上記荷重検出手段は、上記サポート部に設けられていることを特徴とするものである。
次に、請求項7に記載した発明は、請求項3〜請求項6のいずれか1項に記載した構成に対し、上記球面軸受の軸受面間に形成する潤滑剤の膜厚を所定範囲に制御することを特徴とするものである。
次に、請求項8に記載した発明は、請求項3〜請求項7のいずれか1項に記載した構成に対し、支持架台を昇降させる昇降手段を備えることを特徴とするものである。
【発明の効果】
【0010】
請求項1又は請求項3に係る発明によれば、球面軸受の中心位置で揺動自在に支持し、且つ潤滑剤で浮上させることで、軸受面間の静止摩擦をゼロに近づけることができる結果、回転体を静的な状態での傾き状態や該傾きに対応する周方向に沿った荷重偏差状態に基づいて、アンバランス量を検出することができる。これによって、従来と比較して検査対象物の質量に制限が無くなり、超大型品であっても検査が可能となる。
また、検査対象物が大型化するほど、球面軸受の軸心(支持位置)と検査対象物の中心軸とを一致させることが困難となるが、請求項2又は請求項4に係る発明によれば、その偏差量を検出し、検出した偏差量で上記アンバランス量を補正する結果、検査対象物が大きくなっても精度良くアンバランス量を測定することができる。
【0011】
次に、請求項5に係る発明によれば、外周の複数点(径方向に並ばない3点以上)での荷重を検出することで、その複数の荷重間の関係から、サポート部が無い場合における中心軸(軸受の揺動中心)を中心とした上下方向への傾き具合が測定される結果、アンバランス量を測定することが可能となる。なお、サポート部が無い場合には、上下方向の傾きの変動が収まるまで待つ必要があるが、本願発明ではそのようなことが不要となるか短縮することができる。
なお、各サポート部は多少上下方向に伸縮可能となっていても良い。
【0012】
次に、請求項6に記載した発明によれば、個別の荷重検出手段を支持する部材が不要となる。
次に、請求項7に記載した発明によれば、膜厚制御をすることで、安定して浮上させた状態にすることができる。
次に、請求項8に記載した発明によれば、軸受面間が離れるように支持架台を浮かすことが可能となり、浮かした状態で回転体を載置することで当該回転体を載置する際の衝撃を軸受面に入力することが回避されて、球面軸受の寿命劣化を抑えることができる。
【発明を実施するための最良の形態】
【0013】
次に、本発明の実施形態について図面を参照しつつ説明する。
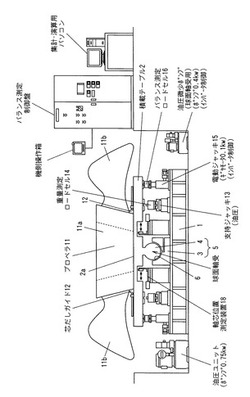
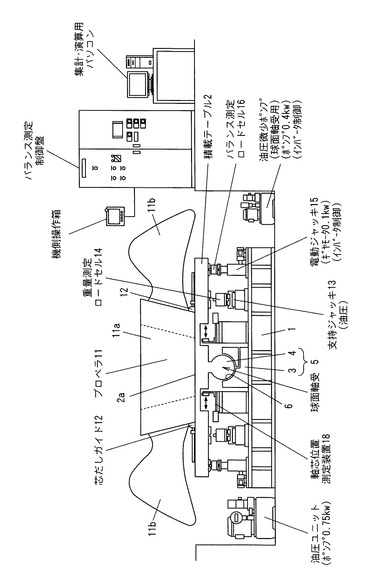
図1は、本実施形態におけるバランス検査装置を示す概要構成図である。
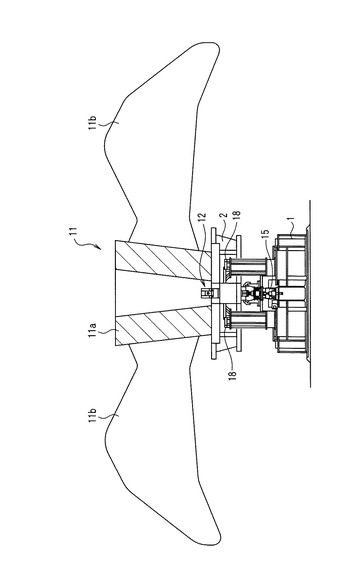
本実施形態のバランス検査装置は、図1に示すように、基台1と、その基台1の上方に位置し支持架台を構成する積載テーブル2と、基台1の中央部に上記積載テーブル2の中央部を揺動自在に支持する軸心部5とを備える。
【0014】
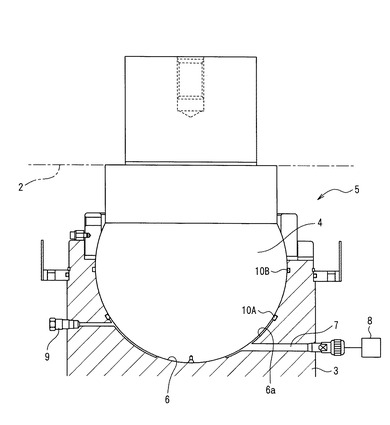
まず、上記軸心部5の構成を説明すると、図2に示すように、基台1の中央部から上方に突出する短柱部3の上端面に、半球形状の凹面からなる球面座6(軸受本体)が形成されると共に、積載テーブル2の中央に取り付けられて下方に突出し先端部に上記球面座6に嵌め込まれる球体4(ジャーナル)を備え、その球面座6及び球体4から球面軸受が形成されている。上記凹面状の球面座6の表面には、下側部分(球面座6で仮想される球面の中心よりも下方位置)に同心帯状の溝部6aが形成されている。この溝部6aによって、嵌め込まれた球体4と球面座6との間に、軸心に対して同心帯状の隙間が形成される。また溝部6aには、短柱部3に開設された潤滑油供給路7の一端が開口している。その潤滑油供給路7の他端部は、弁及び油圧ポンプや油圧回路を備えた潤滑油供給装置8に連通し、該潤滑油供給装置8を駆動することで、上記溝部6aに潤滑油が圧送される。符号9はエア抜きバルブで、球面座6の球体4を嵌め込む際の空気を逃がすものである。また、上記帯状の溝部6aにおける上端縁部には周方向に沿って無端状に延びるように配置されたOリングからなるシールリング10Aが設けられ、溝部6aと球体4との間に供給された潤滑油が、溝部6aよりも上側に漏れることを防止することで安定した膜厚形成を可能にしている。また、上記溝部6aの上端縁部さらに上部にも漏れ防止のためのシールリング10Bを設けてある。
【0015】
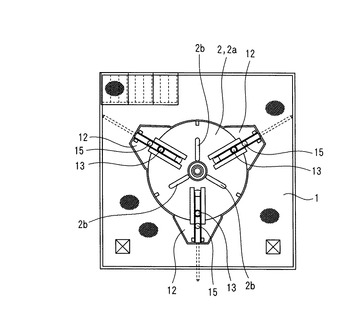
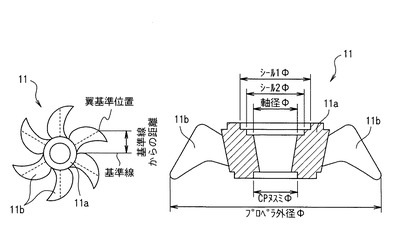
上記積載テーブル2は、図3に示すように、その上面にプロペラ11を載置する平坦な載置面2aを備える。
ここで、本実施形態の回転体の例は、プロペラ11であって、図4に示すように、プロペラ軸を嵌め込む貫通穴を中央部に形成した円環状のボス部11aと、そのボス部11aから放射状に延びる複数の羽根部11bとから構成されていて、横置き状態のプロペラ11における、上記ボス部11aの下端面が上記積載テーブル2の載置面2aに当接してプロペラ11が設置される。なお、本実施形態では、回転体の例としてプロペラ11を挙げているが、ファンなど、放射状に複数の羽根部11bが配置されて、所定の回転軸周りに回転する構造のものであれば適用可能である。
【0016】
また、上記積載テーブル2には、図3に示すように、積載するプロペラ11の中心軸を、積載テーブル2の中央(球面軸受の軸心(揺動中心))に一致させる3組の芯だしガイド12を備える。各芯だしガイド12は、図5,及び図6に示すように、同心状に配置されてそれぞれ径方向に進退するガイド部本体12aからなり、ガイド部本体12aの内径面を、上記ボス部11aの下端外周部に当接させることで芯だしを行うものである。そして、次に検査対象となるプロペラ11のボス部11aの外径に合わせて3組のガイド部本体12aを同量だけ径方向に進退させて、該ガイド部本体12a内に上記ボス部11aがちょうど嵌り込む位置に調整する。
【0017】
さらに、上記基台1には、図1,及び図7に示すように、上記軸心部5の外周には、該軸心部5を中心とした同心円上かつ周方向の等間隔に3台の支持ジャッキ13が配置されている。各支持ジャッキ13は、昇降手段を構成し、油圧駆動されて、同期をとって昇降する。そして、3つの支持ジャッキ13を、同期をとって上昇させることで、上記積載テーブル2を、水平姿勢を保ったまま垂直且つ上方に持ち上げることができる。なお、上記各支持ジャッキ13にはロードセル14が設けられ、積載されたプロペラ11及び積載テーブル2の質量を測定可能となっている。
【0018】
また、上記各支持ジャッキ13よりも外周には、図1,図7及び図8に示すように、該軸心部5を中心とした同心円上かつ周方向に等間隔に3台の電動ジャッキ15が配置されている。この電動ジャッキ15は、サポート部を構成し、球体4を上側から球面座6に嵌め込んだ状態で積載テーブル2を水平姿勢に保持するものである。この電動ジャッキ15の上部には、バランス測定用の圧縮型ロードセル16が設けられている。また、その上部は、衝撃吸収用のコイルバネ17によって上下に伸縮可能となっている。
なお、本実施形態では、支持ジャッキ13と電動ジャッキ15とは径方向で並ぶように配置されているが、径方向で並んでいなくても良い。
【0019】
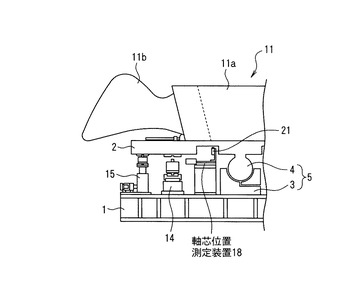
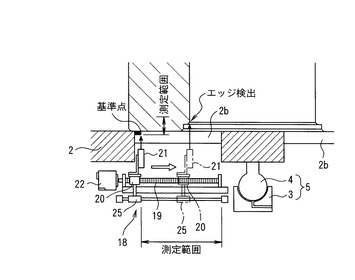
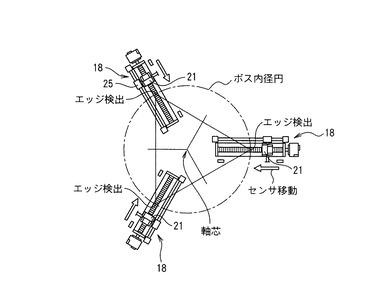
また、軸心部5の外周であって載置面2aの下方位置に、図9に示すように、軸芯位置測定装置18が配置されている。軸芯位置測定装置18は、球面軸受の揺動中心位置を中心とした仮想の円に沿って等間隔に3台設けられている。その各軸芯位置測定装置18は、図10に示すように、軸芯から径方向に沿って延びるように配置したボールねじ19と、そのボールねじ19に案内されるスライダ20と、そのスライダ20に取り付けられたレーザ変位計21とを備えることで、該レーザ変位計21は、径方向に直進移動可能となっている。レーザ変位計21は、上方の対象物までの距離を測定してコントローラに出力する。符号22はボールねじ19を回転させるサーボモータである。また、ボールねじに沿ってリアルスケール25が配置され、上記スライダの移動に伴って移動することで、基準点からのレーザ変位計21の移動量が計測されてコントローラ20に出力される。
【0020】
ここで、上記積載テーブル2における上記レーザ変位計21と上下で対向する部分には、図3、図10のように、径方向に延びるスリット状の長穴2bが形成されていて、上記レーザ変位計21によってハブ部11aの下端面までの距離が測定可能となっている。
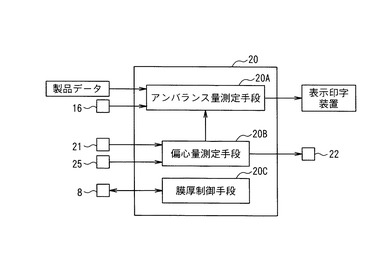
また、コントローラ20は、図11に示すように、アンバランス量測定手段20A、偏心量測定手段20B、および膜厚制御手段20Cを備える。
【0021】
偏心量測定手段20Bは、サーボモータ22に駆動指令を出力して、レーザ変位計21を外径側から内径側に向けて移動させながら、レーザ変位計21からの距離情報を入力し、該距離情報がボス部11aのエッジの距離情報となったらモータ22に停止指令を出力し、そのときの基準位置からの移動量を入力する。なお、エッジ検出が完了したら、モータを駆動してレーザ変位計21を初期位置に復帰させる。上記各移動量から、図12のように、ボス部11a内径円の3点の情報を取得し、その3点を通過する円の中心点(軸心)の座標を求めることで偏心量を求め、上記アンバランス量測定手段20Aに供給する。
【0022】
また、アンバランス量測定手段20Aは、ロードセンサ16から、周方向に沿った3点位置での荷重情報を入力したら、その3点位置での荷重やその荷重差から、周方向に沿った電動ジャッキ15による支持がないとした場合におけるプロペラ11の傾き状態(どちらの方向にどれだけ傾くか等)に応じた、周方向に沿った荷重バランス状態を求める。さらに、その荷重バランス状態について上記偏心量測定手段20Bからの偏心情報に基づき、上記検出したバランス状態を補正した後、対象とするプロペラ11の質量や寸法に基づき、回転体であるプロペラ11の外周位置に位置する各羽根部11bの先端部位置における、上記傾き状態つまりアンバランス状態を解消するための釣合質量を演算し、その演算結果を表示若しくは印字する。
【0023】
また、膜厚制御手段20Cは、予め上記球面座6と球体との間、つまり軸受面間に形成する潤滑剤の膜厚と、その膜厚に対応する積載テーブル2の浮上量との対応テーブルを記憶しておき、潤滑剤供給装置の油圧ポンプで潤滑剤を圧送しながら、上記レーザ変位計21を使用して浮上量を測定し該浮上量が所定の範囲内になった時点で弁を閉じてポンプを停止する。膜厚の制御は、供給する潤滑油の量や、圧力に基づき制御しても良い。
【0024】
なお、バランス検出が終了したら、弁を開状態として、軸受面間から潤滑剤をドレーンに抜く。なお、潤滑剤としては潤滑油が例示できる。
ここで、上記膜厚制御は、球面座6と球体間を浮上状態にする制御で摩擦を極小に抑えることを実現し、その浮上状態での静的バランスを求めることによりアンバランス量の検出を可能とするための操作である。
【0025】
次に、上記構成のバランス検査装置を使用したバランス検査、及びその作用・効果について説明する。
まず、図13(a)のように、3台の支持ジャッキ13を、同期をもって駆動し上限位置まで伸展させることで、積載テーブル2を上方に持ち上げ、球体4を球面座6から離した状態(軸受面間を非接触状態)とする。これを初期位置とする。
【0026】
次に、図13(b)のように、検査対象となるプロペラ11を水平姿勢にしてクレーンで吊り上げ、そのプロペラ11を、積載テーブル2の載置面2a上方に移動させた後に、載置面2aに向けて降ろす。このとき、着床寸前で止め、芯だしガイド12でプロペラ11の中心軸が軸心と一致するように芯出しをした後にバブ部11aを着床させる。なお、プロペラ11が大型化するほど芯だしの精度が悪くなりやすい。
【0027】
次に、図13(c)のように、軸芯位置測定装置を作動し、外径方向から内径方向に向けて移動しながらレーザ変位計21で上方の対象物までの距離を測定し、ボス部11a内径エッジ部の距離(距離が急激に大きくなる境界位置)を検出したらレーザ変位計21の移動を停止して、基準位置からのレーザ変位計21の移動量をリニアスケールで検出し、その検出値をコントローラ20に出力する。コントローラ20では、3カ所の軸芯位置測定装置18からの基準位置からの移動量に基づき、プロペラ11の実際の中心軸位置を求める。上記3カ所のエッジ検出位置は、ボス部11a内径の円周上に位置するから、この3点から当該3点を通過する円を特定し当該円の中心点を演算する。そして、上記中心点を原点(積載テーブル2の中心)からのX−Y座標での座標として、アンバランス量測定手段8Aに出力する。
【0028】
次に、図13(d)のように、支持ジャッキ13を下降させて、球体4を球面座6に着床させると共に電動ジャッキ15で積載テーブル2を受ける。支持ジャッキ13は、さらに下限位置まで下降して積載テーブル2から離す、つまり積載テーブル2の支持を止める。
次に、必要であれば、電動ジャッキ15の高さを調整することで、積載テーブル2の水平状態の調整を行う。
【0029】
続いて、図13(e)のように、潤滑油供給装置8を駆動して球面座6の溝部6aに潤滑油を圧送して、球面座6と球体4との間に潤滑膜を形成して、球面座6に対し球体4をわずかに浮上させる。ここで、積載テーブル2までの上下距離を測定することで、浮上量を計測し、該浮上量に基づき球面座6と球体4間が浮上状態となるように制御して、安定した膜厚つまり安定した浮上状態とする。浮上状態となったら、弁を閉じてその状態を保持する。
【0030】
潤滑油で浮上支持することで、静止摩擦が大幅に減って、静的な状態で、荷重の微小なアンバランスを適正に検出可能となる。
この状態で、各電動ジャッキ15に設けたロードセル16によって各位置の荷重を検出してコントローラ20に出力する。
コントローラ20では、径方向で重ならない3点以上の各位置での各荷重の偏荷重に基づき、プロペラ11の中心軸を中心にしたX-Y平面での荷重の偏心状態(アンバランス情報)を演算する。このとき、上記求めた軸心からの偏心情報を使用して、上記アンバランス情報を補正する。
【0031】
さらに、積載テーブル2の質量、プロペラ11の寸法や質量などのプロペラ11の製品情報に基づき、上記荷重のアンバランス情報から、各羽根部11bの先端位置での補正すべき(削るべき)釣合質量を演算して表示若しくは印字する。
上記検査が完了したら、上記弁を開け球面座6から潤滑油を抜くと共に、図13(f)のように、支持ジャッキ13を上昇させて積載テーブル2を上方に浮かせる。
そして、プロペラ11の羽根部11bの先端部を切削工程に搬送して、上記検出した釣合質量に基づき切削してバランスを取る。
【0032】
以上のように、本実施形態の検査を採用すると、プロペラ11を回転させることなく、静的バランスでアンバランス状態を検査することが可能となる。
また、従来のように、プロペラ11を回転させて、いわゆる動的バランス状態によって静的バランスを検査する必要がないので、大型のプロペラ11でも容易にバランスの検査が可能となる。
【0033】
また、球面座6に球体4が着座した状態で積載テーブル2にプロペラ11を積載すると、積載時の衝撃で球面座6若しくは球体4の表面が損傷する可能性があり、損傷すると検査の精度に影響が出る。このことは、検査対象のプロペラ11が重くなるほど深刻である。これに対し、本実施形態では、支持ジャッキ13で積載テーブル2を上方に浮かした状態で当該積載テーブル2にプロペラ11を積載するので、上記問題は発生しない。
【0034】
また、上記支持ジャッキ13とは別に電動ジャッキ15を設けておくことで、支持ジャッキ13を単に下限位置まで下降させるだけで、球体4が球面座6に着座する際に、自動的に電動ジャッキ15にも支持されて、積載テーブル2が水平に支持されると共に、電動ジャッキ15で受けることで、球体4が球面座6に着座する際の衝撃が緩和される。
また、上記のように軸受面間に潤滑膜を形成して浮かした状態でアンバランスを検出するので、静止摩擦を許容できるまで小さく設定でき、質量が重い回転体についての静止状態でのバランス検査であっても、当該静止摩擦による誤差が回避されて、正確に測定することができる。
【0035】
また、プロペラ11が大型化するほど、精度良く積載テーブル2にプロペラ11を設置できなくなるが、本実施形態では、軸芯位置測定装置18によって偏心量が測定され、該偏心量で補正されることで、プロペラ11が大型化しても、より正確にアンバランス状態を検出することができる。
ここで、上記実施形態では、3点の位置の荷重を検出しているが4点以上の位置の荷重を検出しても良い。ただし3点の位置の荷重が検出できれば、周方向に沿った荷重バランス状態は判定することができる。
また、支持ジャッキ13、電動ジャッキ15、軸芯置測定装置18などについても3台に限定されず、4台以上使用しても良い。
また、電動ジャッキ15を省略して、支持ジャッキ13にサポート部の役割を持たせても良い。ただし、別途、電動ジャッキ15を設けた方が、制御が簡易となる。
【図面の簡単な説明】
【0036】
【図1】本発明に基づく実施形態に係る検査装置の構成を示す概要図である。
【図2】軸心部の示す図である。
【図3】載置テーブルを示す平面図である。
【図4】本発明に基づく実施形態に係るプロペラを示す図である。
【図5】プロペラを載置した状態を示す側面図である。
【図6】軸芯位置測定装置を示す側面図である。
【図7】ジャッキの配置を示す側面図である。
【図8】電動ジャッキを示す側面図である。
【図9】軸芯位置測定装置の配置位置を示す側面図である。
【図10】軸芯位置測定装置の構成を説明する側面図である。
【図11】軸心位置測定装置の配置を示す平面図である。
【図12】コントローラの構成を示す図である。
【図13】検査の手順を示す図である。
【符号の説明】
【0037】
1 基台
2 積載テーブル(支持架台)
3 短柱部
4 球体(球面軸受)
5 軸心部
6 球面座(球面軸受)
6a 溝部
8 潤滑剤供給装置
8A アンバランス量測定手段
8B 偏心量測定手段
8C 膜厚制御手段
11 プロペラ
11a ハブ部
11b 羽根部
12 芯だしガイド
13 支持ジャッキ(昇降手段)
15 電動ジャッキ(サポート部)
16 ロードセル(荷重検出手段)
18 軸心位置測定装置
【技術分野】
【0001】
本発明は、プロペラやファンなどの翼体を備えた回転体の静的バランスを検査するバランス検査方法及びバランス検査装置に関する。特に、大型な回転体や質量が重い回転体に有効な技術である。
【背景技術】
【0002】
プロペラの静的バランス検査方法としては、例えば特許文献1に記載の技術がある。この検査方法は、平行な一対の水平レールに案内支持させるように、プロペラを起立させ回転軸を取り付けてから、一方のプロペラの羽根部に重錘を着けて少し回転させ同プロペラの羽根部先端の低下する方向への回転を始めるのに必要な最小の第1モーメントを検出すると共に、他方のプロペの羽根部に重錘を着けて少し逆回転させ同プロペラの羽根部先端の低下する方向への回転を始めるのに必要な最小の第2モーメントを検出し、その検出した第1及び第2モーメントからアンバランス量を計測するものである。
【0003】
また、動的バランス検査方法としては、例えば特許文献2,3に記載の技術がある。この検査方法は、検査する回転体を回転中心で回転自在、揺動自在に支持できるように静圧球面軸受を配して、上記検査する回転体の回転駆動時の荷重変動を計測してアンバランス量を計測するものである。
【特許文献1】特開平2−232542号公報
【特許文献2】特開昭62−226032号公報
【特許文献3】特開昭62−34029号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記従来技術である特許文献1では、プロペラを起立した姿勢で吊り上げて、一対のレール間に転動可能に設置する必要があるが、この作業は時間が掛かって作業性が悪い。
また、プロペラをレールに沿って回転可能な不安定な状態としてのバランス検査となり、また、設置した後も重錘を何度も着け替える作業が発生すると共に、重錘を付ける度に回動変位させる必要があることから時間も掛かる。すなわち、従来のバランス検査方法にあっては、少しずつ回転させながら周方向に沿ったバランス状態を順次、検査する必要があり、手間と時間が掛かる。
【0005】
また、特許文献2,3では検査する回転体を回転しつつ、その回転時に計測される荷重変動からバランス検査が行われるため、検査する回転体の回転中心に対する芯出し精度がバランス検査精度に大きな影響を与える。
以上のような課題は、バランス検査を行うプロペラ等の回転体が大型化かつ重くなるほど顕著なものとなる。
本発明は、このような点に着目してなされたもので、プロペラその他の回転体を安定した状態でバランス検査を行えること課題としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のうち請求項1に記載の発明は、放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査方法であって、
水平姿勢にした上記回転体を、上記中心軸位置で下側から球面軸受を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記回転体の静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出することを特徴とするものである。
【0007】
次に、請求項2に記載した発明は、請求項1に記載した構成に対し、平面視における上記球面軸受の揺動中心位置と回転体の中心軸との偏差に基づき上記検出するアンバランス量を補正することを特徴とするものである。
次に、請求項3に記載した発明は、放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査装置であって、
水平姿勢にして上記回転体を載置する支持架台と、支持架台に載置された上記回転体の中心軸位置で揺動可能に当該支持架台を下側から球面軸受で支持する軸支部と、上記球面軸受の軸受面間に潤滑剤を圧入して上記支持架台を浮上支持状態とする浮上手段と、上記回転体を載せた支持架台の傾き状態若しくは荷重バランスに基づき上記回転体のアンバランス量を検出するアンバランス量検出手段と、を備えることを特徴とするものである。
【0008】
次に、請求項4に記載した発明は、請求項3に記載した構成に対し、支持架台に載置された回転体の中心軸と、球面軸受の揺動中心位置との平面視における偏心量を測定する測定手段を設け、上記アンバランス量検出手段は、該測定手段が測定した偏心量に基づきアンバランス量を補正することを特徴とするものである。
次に、請求項5に記載した発明は、請求項3又は請求項4に記載した構成に対し、上記支持架台の載置面が水平若しくは略水平になるように、支持架台に下から当接して当該支持架台を支持する複数のサポート部と、球面軸受の外周側に位置して上記回転体を載置した支持架台の複数位置での荷重を検出する複数の荷重検出手段とを備え、
上記アンバランス量検出手段は、上記複数の荷重検出手段の検出値に基づきアンバランス量を検出することを特徴とするものである。
【0009】
次に、請求項6に記載した発明は、請求項5に記載した構成に対し、上記荷重検出手段は、上記サポート部に設けられていることを特徴とするものである。
次に、請求項7に記載した発明は、請求項3〜請求項6のいずれか1項に記載した構成に対し、上記球面軸受の軸受面間に形成する潤滑剤の膜厚を所定範囲に制御することを特徴とするものである。
次に、請求項8に記載した発明は、請求項3〜請求項7のいずれか1項に記載した構成に対し、支持架台を昇降させる昇降手段を備えることを特徴とするものである。
【発明の効果】
【0010】
請求項1又は請求項3に係る発明によれば、球面軸受の中心位置で揺動自在に支持し、且つ潤滑剤で浮上させることで、軸受面間の静止摩擦をゼロに近づけることができる結果、回転体を静的な状態での傾き状態や該傾きに対応する周方向に沿った荷重偏差状態に基づいて、アンバランス量を検出することができる。これによって、従来と比較して検査対象物の質量に制限が無くなり、超大型品であっても検査が可能となる。
また、検査対象物が大型化するほど、球面軸受の軸心(支持位置)と検査対象物の中心軸とを一致させることが困難となるが、請求項2又は請求項4に係る発明によれば、その偏差量を検出し、検出した偏差量で上記アンバランス量を補正する結果、検査対象物が大きくなっても精度良くアンバランス量を測定することができる。
【0011】
次に、請求項5に係る発明によれば、外周の複数点(径方向に並ばない3点以上)での荷重を検出することで、その複数の荷重間の関係から、サポート部が無い場合における中心軸(軸受の揺動中心)を中心とした上下方向への傾き具合が測定される結果、アンバランス量を測定することが可能となる。なお、サポート部が無い場合には、上下方向の傾きの変動が収まるまで待つ必要があるが、本願発明ではそのようなことが不要となるか短縮することができる。
なお、各サポート部は多少上下方向に伸縮可能となっていても良い。
【0012】
次に、請求項6に記載した発明によれば、個別の荷重検出手段を支持する部材が不要となる。
次に、請求項7に記載した発明によれば、膜厚制御をすることで、安定して浮上させた状態にすることができる。
次に、請求項8に記載した発明によれば、軸受面間が離れるように支持架台を浮かすことが可能となり、浮かした状態で回転体を載置することで当該回転体を載置する際の衝撃を軸受面に入力することが回避されて、球面軸受の寿命劣化を抑えることができる。
【発明を実施するための最良の形態】
【0013】
次に、本発明の実施形態について図面を参照しつつ説明する。
図1は、本実施形態におけるバランス検査装置を示す概要構成図である。
本実施形態のバランス検査装置は、図1に示すように、基台1と、その基台1の上方に位置し支持架台を構成する積載テーブル2と、基台1の中央部に上記積載テーブル2の中央部を揺動自在に支持する軸心部5とを備える。
【0014】
まず、上記軸心部5の構成を説明すると、図2に示すように、基台1の中央部から上方に突出する短柱部3の上端面に、半球形状の凹面からなる球面座6(軸受本体)が形成されると共に、積載テーブル2の中央に取り付けられて下方に突出し先端部に上記球面座6に嵌め込まれる球体4(ジャーナル)を備え、その球面座6及び球体4から球面軸受が形成されている。上記凹面状の球面座6の表面には、下側部分(球面座6で仮想される球面の中心よりも下方位置)に同心帯状の溝部6aが形成されている。この溝部6aによって、嵌め込まれた球体4と球面座6との間に、軸心に対して同心帯状の隙間が形成される。また溝部6aには、短柱部3に開設された潤滑油供給路7の一端が開口している。その潤滑油供給路7の他端部は、弁及び油圧ポンプや油圧回路を備えた潤滑油供給装置8に連通し、該潤滑油供給装置8を駆動することで、上記溝部6aに潤滑油が圧送される。符号9はエア抜きバルブで、球面座6の球体4を嵌め込む際の空気を逃がすものである。また、上記帯状の溝部6aにおける上端縁部には周方向に沿って無端状に延びるように配置されたOリングからなるシールリング10Aが設けられ、溝部6aと球体4との間に供給された潤滑油が、溝部6aよりも上側に漏れることを防止することで安定した膜厚形成を可能にしている。また、上記溝部6aの上端縁部さらに上部にも漏れ防止のためのシールリング10Bを設けてある。
【0015】
上記積載テーブル2は、図3に示すように、その上面にプロペラ11を載置する平坦な載置面2aを備える。
ここで、本実施形態の回転体の例は、プロペラ11であって、図4に示すように、プロペラ軸を嵌め込む貫通穴を中央部に形成した円環状のボス部11aと、そのボス部11aから放射状に延びる複数の羽根部11bとから構成されていて、横置き状態のプロペラ11における、上記ボス部11aの下端面が上記積載テーブル2の載置面2aに当接してプロペラ11が設置される。なお、本実施形態では、回転体の例としてプロペラ11を挙げているが、ファンなど、放射状に複数の羽根部11bが配置されて、所定の回転軸周りに回転する構造のものであれば適用可能である。
【0016】
また、上記積載テーブル2には、図3に示すように、積載するプロペラ11の中心軸を、積載テーブル2の中央(球面軸受の軸心(揺動中心))に一致させる3組の芯だしガイド12を備える。各芯だしガイド12は、図5,及び図6に示すように、同心状に配置されてそれぞれ径方向に進退するガイド部本体12aからなり、ガイド部本体12aの内径面を、上記ボス部11aの下端外周部に当接させることで芯だしを行うものである。そして、次に検査対象となるプロペラ11のボス部11aの外径に合わせて3組のガイド部本体12aを同量だけ径方向に進退させて、該ガイド部本体12a内に上記ボス部11aがちょうど嵌り込む位置に調整する。
【0017】
さらに、上記基台1には、図1,及び図7に示すように、上記軸心部5の外周には、該軸心部5を中心とした同心円上かつ周方向の等間隔に3台の支持ジャッキ13が配置されている。各支持ジャッキ13は、昇降手段を構成し、油圧駆動されて、同期をとって昇降する。そして、3つの支持ジャッキ13を、同期をとって上昇させることで、上記積載テーブル2を、水平姿勢を保ったまま垂直且つ上方に持ち上げることができる。なお、上記各支持ジャッキ13にはロードセル14が設けられ、積載されたプロペラ11及び積載テーブル2の質量を測定可能となっている。
【0018】
また、上記各支持ジャッキ13よりも外周には、図1,図7及び図8に示すように、該軸心部5を中心とした同心円上かつ周方向に等間隔に3台の電動ジャッキ15が配置されている。この電動ジャッキ15は、サポート部を構成し、球体4を上側から球面座6に嵌め込んだ状態で積載テーブル2を水平姿勢に保持するものである。この電動ジャッキ15の上部には、バランス測定用の圧縮型ロードセル16が設けられている。また、その上部は、衝撃吸収用のコイルバネ17によって上下に伸縮可能となっている。
なお、本実施形態では、支持ジャッキ13と電動ジャッキ15とは径方向で並ぶように配置されているが、径方向で並んでいなくても良い。
【0019】
また、軸心部5の外周であって載置面2aの下方位置に、図9に示すように、軸芯位置測定装置18が配置されている。軸芯位置測定装置18は、球面軸受の揺動中心位置を中心とした仮想の円に沿って等間隔に3台設けられている。その各軸芯位置測定装置18は、図10に示すように、軸芯から径方向に沿って延びるように配置したボールねじ19と、そのボールねじ19に案内されるスライダ20と、そのスライダ20に取り付けられたレーザ変位計21とを備えることで、該レーザ変位計21は、径方向に直進移動可能となっている。レーザ変位計21は、上方の対象物までの距離を測定してコントローラに出力する。符号22はボールねじ19を回転させるサーボモータである。また、ボールねじに沿ってリアルスケール25が配置され、上記スライダの移動に伴って移動することで、基準点からのレーザ変位計21の移動量が計測されてコントローラ20に出力される。
【0020】
ここで、上記積載テーブル2における上記レーザ変位計21と上下で対向する部分には、図3、図10のように、径方向に延びるスリット状の長穴2bが形成されていて、上記レーザ変位計21によってハブ部11aの下端面までの距離が測定可能となっている。
また、コントローラ20は、図11に示すように、アンバランス量測定手段20A、偏心量測定手段20B、および膜厚制御手段20Cを備える。
【0021】
偏心量測定手段20Bは、サーボモータ22に駆動指令を出力して、レーザ変位計21を外径側から内径側に向けて移動させながら、レーザ変位計21からの距離情報を入力し、該距離情報がボス部11aのエッジの距離情報となったらモータ22に停止指令を出力し、そのときの基準位置からの移動量を入力する。なお、エッジ検出が完了したら、モータを駆動してレーザ変位計21を初期位置に復帰させる。上記各移動量から、図12のように、ボス部11a内径円の3点の情報を取得し、その3点を通過する円の中心点(軸心)の座標を求めることで偏心量を求め、上記アンバランス量測定手段20Aに供給する。
【0022】
また、アンバランス量測定手段20Aは、ロードセンサ16から、周方向に沿った3点位置での荷重情報を入力したら、その3点位置での荷重やその荷重差から、周方向に沿った電動ジャッキ15による支持がないとした場合におけるプロペラ11の傾き状態(どちらの方向にどれだけ傾くか等)に応じた、周方向に沿った荷重バランス状態を求める。さらに、その荷重バランス状態について上記偏心量測定手段20Bからの偏心情報に基づき、上記検出したバランス状態を補正した後、対象とするプロペラ11の質量や寸法に基づき、回転体であるプロペラ11の外周位置に位置する各羽根部11bの先端部位置における、上記傾き状態つまりアンバランス状態を解消するための釣合質量を演算し、その演算結果を表示若しくは印字する。
【0023】
また、膜厚制御手段20Cは、予め上記球面座6と球体との間、つまり軸受面間に形成する潤滑剤の膜厚と、その膜厚に対応する積載テーブル2の浮上量との対応テーブルを記憶しておき、潤滑剤供給装置の油圧ポンプで潤滑剤を圧送しながら、上記レーザ変位計21を使用して浮上量を測定し該浮上量が所定の範囲内になった時点で弁を閉じてポンプを停止する。膜厚の制御は、供給する潤滑油の量や、圧力に基づき制御しても良い。
【0024】
なお、バランス検出が終了したら、弁を開状態として、軸受面間から潤滑剤をドレーンに抜く。なお、潤滑剤としては潤滑油が例示できる。
ここで、上記膜厚制御は、球面座6と球体間を浮上状態にする制御で摩擦を極小に抑えることを実現し、その浮上状態での静的バランスを求めることによりアンバランス量の検出を可能とするための操作である。
【0025】
次に、上記構成のバランス検査装置を使用したバランス検査、及びその作用・効果について説明する。
まず、図13(a)のように、3台の支持ジャッキ13を、同期をもって駆動し上限位置まで伸展させることで、積載テーブル2を上方に持ち上げ、球体4を球面座6から離した状態(軸受面間を非接触状態)とする。これを初期位置とする。
【0026】
次に、図13(b)のように、検査対象となるプロペラ11を水平姿勢にしてクレーンで吊り上げ、そのプロペラ11を、積載テーブル2の載置面2a上方に移動させた後に、載置面2aに向けて降ろす。このとき、着床寸前で止め、芯だしガイド12でプロペラ11の中心軸が軸心と一致するように芯出しをした後にバブ部11aを着床させる。なお、プロペラ11が大型化するほど芯だしの精度が悪くなりやすい。
【0027】
次に、図13(c)のように、軸芯位置測定装置を作動し、外径方向から内径方向に向けて移動しながらレーザ変位計21で上方の対象物までの距離を測定し、ボス部11a内径エッジ部の距離(距離が急激に大きくなる境界位置)を検出したらレーザ変位計21の移動を停止して、基準位置からのレーザ変位計21の移動量をリニアスケールで検出し、その検出値をコントローラ20に出力する。コントローラ20では、3カ所の軸芯位置測定装置18からの基準位置からの移動量に基づき、プロペラ11の実際の中心軸位置を求める。上記3カ所のエッジ検出位置は、ボス部11a内径の円周上に位置するから、この3点から当該3点を通過する円を特定し当該円の中心点を演算する。そして、上記中心点を原点(積載テーブル2の中心)からのX−Y座標での座標として、アンバランス量測定手段8Aに出力する。
【0028】
次に、図13(d)のように、支持ジャッキ13を下降させて、球体4を球面座6に着床させると共に電動ジャッキ15で積載テーブル2を受ける。支持ジャッキ13は、さらに下限位置まで下降して積載テーブル2から離す、つまり積載テーブル2の支持を止める。
次に、必要であれば、電動ジャッキ15の高さを調整することで、積載テーブル2の水平状態の調整を行う。
【0029】
続いて、図13(e)のように、潤滑油供給装置8を駆動して球面座6の溝部6aに潤滑油を圧送して、球面座6と球体4との間に潤滑膜を形成して、球面座6に対し球体4をわずかに浮上させる。ここで、積載テーブル2までの上下距離を測定することで、浮上量を計測し、該浮上量に基づき球面座6と球体4間が浮上状態となるように制御して、安定した膜厚つまり安定した浮上状態とする。浮上状態となったら、弁を閉じてその状態を保持する。
【0030】
潤滑油で浮上支持することで、静止摩擦が大幅に減って、静的な状態で、荷重の微小なアンバランスを適正に検出可能となる。
この状態で、各電動ジャッキ15に設けたロードセル16によって各位置の荷重を検出してコントローラ20に出力する。
コントローラ20では、径方向で重ならない3点以上の各位置での各荷重の偏荷重に基づき、プロペラ11の中心軸を中心にしたX-Y平面での荷重の偏心状態(アンバランス情報)を演算する。このとき、上記求めた軸心からの偏心情報を使用して、上記アンバランス情報を補正する。
【0031】
さらに、積載テーブル2の質量、プロペラ11の寸法や質量などのプロペラ11の製品情報に基づき、上記荷重のアンバランス情報から、各羽根部11bの先端位置での補正すべき(削るべき)釣合質量を演算して表示若しくは印字する。
上記検査が完了したら、上記弁を開け球面座6から潤滑油を抜くと共に、図13(f)のように、支持ジャッキ13を上昇させて積載テーブル2を上方に浮かせる。
そして、プロペラ11の羽根部11bの先端部を切削工程に搬送して、上記検出した釣合質量に基づき切削してバランスを取る。
【0032】
以上のように、本実施形態の検査を採用すると、プロペラ11を回転させることなく、静的バランスでアンバランス状態を検査することが可能となる。
また、従来のように、プロペラ11を回転させて、いわゆる動的バランス状態によって静的バランスを検査する必要がないので、大型のプロペラ11でも容易にバランスの検査が可能となる。
【0033】
また、球面座6に球体4が着座した状態で積載テーブル2にプロペラ11を積載すると、積載時の衝撃で球面座6若しくは球体4の表面が損傷する可能性があり、損傷すると検査の精度に影響が出る。このことは、検査対象のプロペラ11が重くなるほど深刻である。これに対し、本実施形態では、支持ジャッキ13で積載テーブル2を上方に浮かした状態で当該積載テーブル2にプロペラ11を積載するので、上記問題は発生しない。
【0034】
また、上記支持ジャッキ13とは別に電動ジャッキ15を設けておくことで、支持ジャッキ13を単に下限位置まで下降させるだけで、球体4が球面座6に着座する際に、自動的に電動ジャッキ15にも支持されて、積載テーブル2が水平に支持されると共に、電動ジャッキ15で受けることで、球体4が球面座6に着座する際の衝撃が緩和される。
また、上記のように軸受面間に潤滑膜を形成して浮かした状態でアンバランスを検出するので、静止摩擦を許容できるまで小さく設定でき、質量が重い回転体についての静止状態でのバランス検査であっても、当該静止摩擦による誤差が回避されて、正確に測定することができる。
【0035】
また、プロペラ11が大型化するほど、精度良く積載テーブル2にプロペラ11を設置できなくなるが、本実施形態では、軸芯位置測定装置18によって偏心量が測定され、該偏心量で補正されることで、プロペラ11が大型化しても、より正確にアンバランス状態を検出することができる。
ここで、上記実施形態では、3点の位置の荷重を検出しているが4点以上の位置の荷重を検出しても良い。ただし3点の位置の荷重が検出できれば、周方向に沿った荷重バランス状態は判定することができる。
また、支持ジャッキ13、電動ジャッキ15、軸芯置測定装置18などについても3台に限定されず、4台以上使用しても良い。
また、電動ジャッキ15を省略して、支持ジャッキ13にサポート部の役割を持たせても良い。ただし、別途、電動ジャッキ15を設けた方が、制御が簡易となる。
【図面の簡単な説明】
【0036】
【図1】本発明に基づく実施形態に係る検査装置の構成を示す概要図である。
【図2】軸心部の示す図である。
【図3】載置テーブルを示す平面図である。
【図4】本発明に基づく実施形態に係るプロペラを示す図である。
【図5】プロペラを載置した状態を示す側面図である。
【図6】軸芯位置測定装置を示す側面図である。
【図7】ジャッキの配置を示す側面図である。
【図8】電動ジャッキを示す側面図である。
【図9】軸芯位置測定装置の配置位置を示す側面図である。
【図10】軸芯位置測定装置の構成を説明する側面図である。
【図11】軸心位置測定装置の配置を示す平面図である。
【図12】コントローラの構成を示す図である。
【図13】検査の手順を示す図である。
【符号の説明】
【0037】
1 基台
2 積載テーブル(支持架台)
3 短柱部
4 球体(球面軸受)
5 軸心部
6 球面座(球面軸受)
6a 溝部
8 潤滑剤供給装置
8A アンバランス量測定手段
8B 偏心量測定手段
8C 膜厚制御手段
11 プロペラ
11a ハブ部
11b 羽根部
12 芯だしガイド
13 支持ジャッキ(昇降手段)
15 電動ジャッキ(サポート部)
16 ロードセル(荷重検出手段)
18 軸心位置測定装置
【特許請求の範囲】
【請求項1】
放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査方法であって、
水平姿勢にした上記回転体を、上記中心軸位置で下側から球面軸受を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記回転体の静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出することを特徴とするバランス検査方法。
【請求項2】
平面視における上記球面軸受の揺動中心位置と回転体の中心軸との偏差に基づき上記検出するアンバランス量を補正することを特徴とする請求項1に記載したバランス検査方法。
【請求項3】
放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査装置であって、
水平姿勢にして上記回転体を載置する支持架台と、
支持架台に載置された上記回転体の中心軸位置で揺動可能に当該支持架台を下側から球面軸受で支持する軸支部と、
上記球面軸受の軸受面間に潤滑剤を圧入して上記支持架台を浮上支持状態とする浮上手段と、
上記回転体を載せた支持架台の傾き状態若しくは荷重バランスに基づき上記回転体のアンバランス量を検出するアンバランス量検出手段と、を備えることを特徴とするバランス検査装置。
【請求項4】
支持架台に載置された回転体の中心軸と、球面軸受の揺動中心位置との平面視における偏心量を測定する測定手段を設け、
上記アンバランス量検出手段は、該測定手段が測定した偏心量に基づきアンバランス量を補正することを特徴とする請求項3に記載したバランス検査装置。
【請求項5】
上記支持架台の載置面が水平若しくは略水平になるように、支持架台に下から当接して当該支持架台を支持する複数のサポート部と、球面軸受の外周側に位置して上記回転体を載置した支持架台の複数位置での荷重を検出する複数の荷重検出手段と、を備え、
上記アンバランス量検出手段は、上記複数の荷重検出手段の検出値に基づきアンバランス量を検出することを特徴とする請求項3又は請求項4に記載したバランス検査装置。
【請求項6】
上記荷重検出手段は、上記サポート部に設けられていることを特徴とする請求項5に記載したバランス検査装置。
【請求項7】
上記球面軸受の軸受面間に形成する潤滑剤の膜厚を所定範囲に制御することを特徴とする請求項3〜請求項6のいずれか1項に記載したバランス検査装置。
【請求項8】
支持架台を昇降させる昇降手段を備えることを特徴とする請求項3〜請求項7のいずれか1項に記載したバランス検査装置。
【請求項1】
放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査方法であって、
水平姿勢にした上記回転体を、上記中心軸位置で下側から球面軸受を介して揺動可能に支持し、さらに上記球面軸受の軸受面間に潤滑剤を圧入し浮上状態にして上記回転体の静的バランスを求め、その静的バランスに基づき当該回転体のアンバランス量を検出することを特徴とするバランス検査方法。
【請求項2】
平面視における上記球面軸受の揺動中心位置と回転体の中心軸との偏差に基づき上記検出するアンバランス量を補正することを特徴とする請求項1に記載したバランス検査方法。
【請求項3】
放射状に配置された翼体を備え且つ中心軸周りに回転する回転体の静的バランスを検査するバランス検査装置であって、
水平姿勢にして上記回転体を載置する支持架台と、
支持架台に載置された上記回転体の中心軸位置で揺動可能に当該支持架台を下側から球面軸受で支持する軸支部と、
上記球面軸受の軸受面間に潤滑剤を圧入して上記支持架台を浮上支持状態とする浮上手段と、
上記回転体を載せた支持架台の傾き状態若しくは荷重バランスに基づき上記回転体のアンバランス量を検出するアンバランス量検出手段と、を備えることを特徴とするバランス検査装置。
【請求項4】
支持架台に載置された回転体の中心軸と、球面軸受の揺動中心位置との平面視における偏心量を測定する測定手段を設け、
上記アンバランス量検出手段は、該測定手段が測定した偏心量に基づきアンバランス量を補正することを特徴とする請求項3に記載したバランス検査装置。
【請求項5】
上記支持架台の載置面が水平若しくは略水平になるように、支持架台に下から当接して当該支持架台を支持する複数のサポート部と、球面軸受の外周側に位置して上記回転体を載置した支持架台の複数位置での荷重を検出する複数の荷重検出手段と、を備え、
上記アンバランス量検出手段は、上記複数の荷重検出手段の検出値に基づきアンバランス量を検出することを特徴とする請求項3又は請求項4に記載したバランス検査装置。
【請求項6】
上記荷重検出手段は、上記サポート部に設けられていることを特徴とする請求項5に記載したバランス検査装置。
【請求項7】
上記球面軸受の軸受面間に形成する潤滑剤の膜厚を所定範囲に制御することを特徴とする請求項3〜請求項6のいずれか1項に記載したバランス検査装置。
【請求項8】
支持架台を昇降させる昇降手段を備えることを特徴とする請求項3〜請求項7のいずれか1項に記載したバランス検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−225510(P2007−225510A)
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願番号】特願2006−48861(P2006−48861)
【出願日】平成18年2月24日(2006.2.24)
【出願人】(000200334)JFEメカニカル株式会社 (48)
【出願人】(000110435)ナカシマプロペラ株式会社 (33)
【Fターム(参考)】
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願日】平成18年2月24日(2006.2.24)
【出願人】(000200334)JFEメカニカル株式会社 (48)
【出願人】(000110435)ナカシマプロペラ株式会社 (33)
【Fターム(参考)】
[ Back to top ]