
バンパビーム取付け装置及びバンパビーム取付け方法
【課題】ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
【解決手段】バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。
【効果】バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車体へのバンパビームの取付け技術に関する。
【背景技術】
【0002】
車体の前部にフロントバンパを取付け、車体の後部にリヤバンパを取付ける作業は、人手作業からロボットによる無人化作業に代わった(例えば、特許文献1(第2図)参照。)。
【0003】
特許文献1の第2図に示されるように、車体(a)(括弧付き符号は特許文献に記載された符号を示す。以下同様)の前部にフロントバンパ(b1)が、第1組立ロボット(61)で取付けられ、車体(a)の後部にリヤバンパ(b2)が、第2組立ロボット(62)で取付けられる。
【0004】
詳しくは、第1組立ロボット(61)は、吸着パッド(17a)及びナットランナ(18)を備えていて、吸着パッド(17a)でフロントバンパ(b1)を吸着保持しつつ車体の前部へ当て、この状態を保ちながらナットランナ(18)でボルトを締付ける。第2組立ロボット(62)も同様である。
【0005】
すなわち、第1組立ロボット(61)において、吸着パッド(17a)でフロントバンパ(b1)を吸着保持しつつ運搬されている間は、ナットランナ(18)は休止している。そして、ナットランナ(18)でボルトを締付けている間は第1組立ロボット(61)は移動しない。第2組立ロボット(62)も同様である。
【0006】
フロントバンパ(b1)が運搬中には、ナットランナ(18)は止まっており、ナットランナ(18)の稼働率が高いとは言えない。ナットランナ(18)が締付け動作中には、第1組立ロボット(61))は移動しないため、稼働率が高いとは言えない。
ナットランナやロボットの稼働率を高めることが望まれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭63−2780号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【課題を解決するための手段】
【0009】
請求項1に係るバンパビーム取付け装置は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け装置であって、
リヤバンパビームを把持して前側の車体の後部まで運搬する、又はフロントバンパビームを把持して後側の車体の前部まで運搬するバンパビーム運搬ロボットと、
車体に設けられている左側のバンパ取付け位置を検出する左の位置検出センサを備え、バンパビームに左側のボルトを締付ける左の締付けロボットと、
車体に設けられている右側のバンパ取付け位置を検出する右の位置検出センサを備え、バンパビームに右側のボルトを締付ける右の締付けロボットと、
前記バンパビーム運搬ロボット、左の締付けロボット及び右の締付けロボットを一括して制御するロボット制御部と、からなることを特徴とする。
【0010】
請求項2に係るバンパビーム取付け方法は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とする。
【0011】
請求項3に係るバンパビーム取付け方法は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明では、バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
【0013】
また、バンパビームを運搬するロボットは、フロントバンパビームとリヤバンパビームとを交互に運搬し、ボルトを締付けるロボットはフロントバンパビームとリヤバンパビームとを交互に締付ける。そのため、ロボット群は、2台の車体の間を臨む位置に配置される。従来は、車体の前後にロボットを配置されていたが、本発明によれば、2台の車体の間にロボットが配置されているため、ロボットの設置面積を半減することができる。
【0014】
請求項2に係る発明では、バンパビームの運搬と、ボルトの締付けとを重複して実施する。すなわち、ボルトの締付け作業中に、バンパビームの運搬を行わせる。結果、ナットランナ及びロボットの稼働率を高めることができる。
さらには、バンパビーム運搬ロボットは、当該バンパビームの左右のボルトが締付けられた時点で、バンパビームから外され、次の作業に移される。結果、バンパビーム運搬ロボットの稼働率を高めることができる。
【0015】
請求項3に係る発明でも、バンパビームの運搬と、ボルトの締付けとを重複して実施する。すなわち、ボルトの締付け作業中に、バンパビームの運搬を行わせる。結果、ナットランナ及びロボットの稼働率を高めることができる。
さらには、バンパビーム運搬ロボットは、当該バンパビームの左右のボルトが締付けられた時点で、バンパビームから外され、次の作業に移される。結果、バンパビーム運搬ロボットの稼働率を高めることができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係るバンパビーム取付け装置を含む車両製造ラインの平面図である。
【図2】本発明に係るバンパビーム運搬ロボットの要部斜視図である。
【図3】バンパビーム運搬ロボットの作用説明図である。
【図4】本発明に係る締付けロボットの要部斜視図である。
【図5】バンパビーム運搬ロボットによるバンパビーム運搬開始時の作用図である。
【図6】本発明に係るバンパビーム取付け装置の全体的作用説明図である。
【図7】本発明に係るバンパビーム取付け方法を説明するフロー図である。
【発明を実施するための形態】
【0017】
本発明の実施の形態を添付図に基づいて以下に説明する。なお、図面は符号の向きに見るものとする。
【実施例】
【0018】
本発明の実施例を図面に基づいて説明する。
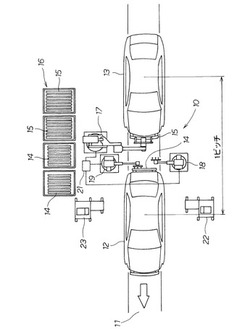
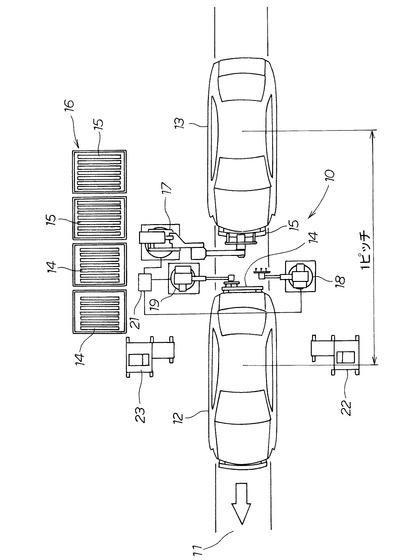
図1に示されるように、バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。前側の車体12の中心と後側の車体13の中心との距離を、「1ピッチ」と定める。
【0019】
具体的には、バンパビーム取付け装置10は、台車上のバンパビームストッカ16中のリヤバンパビーム14を把持して前側の車体12の後部まで運搬する、又はフロントバンパビーム15を把持して後側の車体13の前部まで運搬するバンパビーム運搬ロボット17と、バンパビーム14、15に左側のボルトを締付ける左の締付けロボット18と、バンパビーム14、15に右側のボルトを締付ける右の締付けロボット19と、バンパビーム運搬ロボット17、左の締付けロボット18及び右の締付けロボット19を一括して制御するロボット制御部21と、からなる。
【0020】
ロボット制御部21は、後述の制御フローを実施する制御部である。
また、左の締付けロボット18は、左のボルト供給機22からボルトの供給を受け、右の締付けロボット19は、右のボルト供給機23からボルトの供給を受ける。
【0021】
なお、「前」は白抜き矢印の方向(車両製造ライン11の下流方向)、「後」はその逆方向(車両製造ライン11の上流方向)、「右」はバンパビームストッカ16側(運転席を基準に右)、「左」はその逆(運転席を基準に左)とする。
【0022】
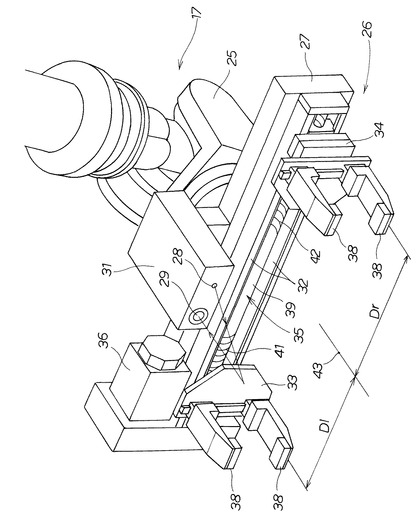
バンパビーム運搬ロボット17は、図2に示すように、ロボットアーム25にバンパビーム把持機構26を備えている。
このバンパビーム把持機構26は、細長いベース27と、このベース27の中央上部に設けられ、投光部28からレーザ光を発射し、反射光を受光部29で受けて、距離などを検出するサーチセンサ31と、ベース27に沿って設けられているレール32、32と、これらレール32、32に移動可能に設けられている左スライダ33及び右スライダ34と、これらのスライダ33、34を移動させるねじ軸35と、このねじ軸35を回転させる横移動アクチュエータ36と、左スライダ33及び右スライダ34に、爪開閉アクチュエータを介して取付けられている爪38とからなる。
【0023】
なお、ねじ軸35は、中央がねじ無し部39であり、このねじ無し部39の一方側に右ねじ部41が設けられ、他方側に左ねじ部42が設けられている。そのため、ねじ軸35を正転(又は逆転)させると、左スライダ33及び右スライダ34は、互いに離れるように同一速度で移動し、ねじ軸35を逆転(又は正転)させると、左スライダ33及び右スライダ34は、互いに接近するように同一速度で移動する。
そして、上述のねじ軸35を採用したことにより、ベース27の長手方向中心43から、左スライダ33までの距離Dlと右スライダ34までの距離Drは、距離Dl=距離Drの関係が常に保たれる。
【0024】
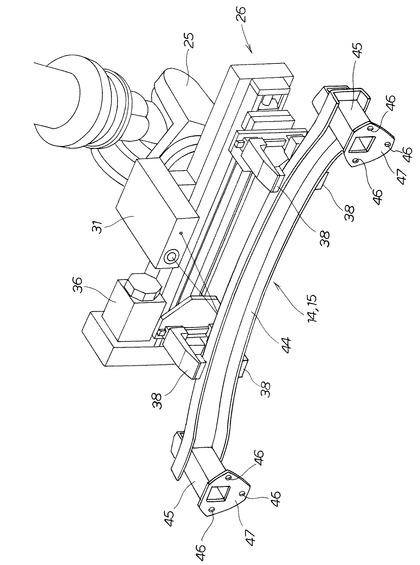
バンパビーム運搬ロボット17の作動を説明すると、上下の爪38、38を開き、バンパビームをサーチセンサ31で検出したら、爪38、38を閉じる。すると、図3に示されるように、バンパビーム14、15が保持される。サーチセンサ31で検出するために、把持ミスが発生しない。
バンパビーム14、15の長さが変更になる場合には、横移動アクチュエータ36により、左スライダ33と右スライダ34との間隔を変更すればよい。
【0025】
バンパビーム14、15は、細長いビーム本体44と、このビーム本体44の両端部から延ばした脚部45、45とからなり、脚部45に複数個(この例では3個)のボルト穴46を有するフランジ47を備えている。
【0026】
次に、左の締付けロボット18及び右の締付けロボット19の要部を説明する。
図4(a)に示すように、ロボットアーム48に、ナットランナ49と、バンパ取付け位置を検出する位置検出センサ50とが、設けられている。この位置検出センサ50も、投光部51からレーザ光を発射し、反射光を受光部52で受けて、距離を検出するものである。なお、ナットランナ49は、複数本であってもよい。
【0027】
なお、バンパ取付け位置は次に述べる方法で検出することもできる。
図4(b)に示すように、受光部52はカメラとし、投光部51からリヤバンパビーム14へレーザ光を発射する。検出対象物53が、正規の位置にあればレーザ光の衝突点はP1となる。
【0028】
仮に、想像線で示すように検出対象物53Aが、正規の位置よりもカメラ52側にあると、レーザ光の衝突点はP2は、カメラ軸直角方向にδaだけ、点P1からずれている。カメラ軸と投光部軸のなす角度θは既知である。カメラ軸に沿ったリヤバンパビーム14Aのずれ量Laは、δa/tanθの算式により求めることができる。
【0029】
また、想像線で示すように検出対象物53Bが、正規の位置よりも反カメラ52側にあると、レーザ光の衝突点はP3は、カメラ軸直角方向にδbだけ、点P1からずれている。カメラ軸に沿ったリヤバンパビーム14Aのずれ量Lbは、δb/tanθの算式により求めることができる。
【0030】
以上に述べたバンパビーム取付け装置の作用を図面に基づいて説明する。
先ず、図5に示すように、バンパビーム運搬ロボット17により、バンパビームストッカ16にストックされているフロントバンパビーム15をピックアップする。
次に、図6に示すように、バンパビーム運搬ロボット17により、フロントバンパビーム15を車体13の前部に臨ませる。続いて、締付けロボット18でボルトを締付ける。ただし、この間の作業手順は次に示すように、きめ細かく実施する。
【0031】
図7に基づいて本発明方法を説明する。なお、本発明方法では、バンパビーム運搬ロボットと、左右の締付けロボットは互いに独立して作動させることができるため、作動は左右に分けて示した。
先ず、バンパビーム搬送ロボットでストッカ中のフロントバンパビームを検出し、取出す(ST01)。並行して左右の締付けロボットはボルトを受取る(ST02)。左右の締付けロボットは、位置センサで後側の車体におけるバンパの取付け位置(位置座標)を検出する(ST03)。この位置情報はバンパビーム搬送ロボットへ伝達される。
【0032】
この位置情報に基づいて、バンパビーム搬送ロボットは、フロントバンパビームを後側の車体の前部の所定位置に臨ませる(ST04)。臨ませることが完了した情報は締付けロボット側に伝達され、締付けロボットは、ナットランナで1本のボルトを締付ける(ST05)。ST06で締付けの完了が確認できたら、バンパビーム搬送ロボットはフロントバンパビームを離し、ストッカへ戻る(ST07)。並行して、ナットランナで残りのボルトを締付ける(ST08)。
【0033】
以上で、フロントバンパビームの取付けが終了したので、リヤバンパビームの取付け作業を同様の手順で開始する。
【0034】
バンパビーム搬送ロボットでストッカ中のリヤバンパビームを検出し、取出す(ST09)。並行して左右の締付けロボットはボルトを受取る(ST10)。 なお、このST10は、ST02でリヤ、フロント両方をボルトを受取っている場合は、省略できる。
左右の締付けロボットは、位置センサで後側の車体におけるバンパの取付け位置(位置座標)を検出する(ST11)。この位置情報はバンパビーム搬送ロボットへ伝達される。
【0035】
この位置情報に基づいて、バンパビーム搬送ロボットは、リヤバンパビームを前側の車体の後部の所定位置に臨ませる(ST12)。臨ませることが完了した情報は締付けロボット側に伝達され、締付けロボットは、ナットランナで1本のボルトを締付ける(ST13)。ST14で締付けの完了が確認できたら、バンパビーム搬送ロボットはリヤバンパビームを離し、ストッカへ戻る(ST15)。並行して、ナットランナで残りのボルトを締付ける(ST16)。
【0036】
これで、リヤバンパビームの取付けが終了したので、車両群を1ピッチ前進させ(ST17)、ST01に戻る。
なお、以上のステップでは、フロントバンパビーム、リヤバンパビームの順で車体に取付けたが、リヤバンパビーム、フロントバンパビームの順で車体に取付けることは差し支えない。
【0037】
また、図6に示したように、締付けロボット18に3本のナットランナ49が設けられている場合には、3個のボルトが同時に締付けられ、うち1個の締付けが完了したら、ST07、ST15が開始される。
すなわち、締付けロボット18に1本のナットランナ49が設けられている場合と、複数本のナットランナ49が設けられている場合とで、作業手順が変わることはない。
【産業上の利用可能性】
【0038】
本発明は、車体にフロントパンパビーム及びリヤバンパビームを取付ける、バンパビーム取付け技術に好適である。
【符号の説明】
【0039】
10…バンパビーム取付け装置、11…車両製造ライン、12…前側の車体、13…後側の車体、14…リヤバンパビーム、15…フロントバンパビーム、17…バンパビーム運搬ロボット、18…左の締付けロボット、19…右の締付けロボット、21…ロボット制御部、49…ナットランナ、50…位置検出センサ。
【技術分野】
【0001】
本発明は、車体へのバンパビームの取付け技術に関する。
【背景技術】
【0002】
車体の前部にフロントバンパを取付け、車体の後部にリヤバンパを取付ける作業は、人手作業からロボットによる無人化作業に代わった(例えば、特許文献1(第2図)参照。)。
【0003】
特許文献1の第2図に示されるように、車体(a)(括弧付き符号は特許文献に記載された符号を示す。以下同様)の前部にフロントバンパ(b1)が、第1組立ロボット(61)で取付けられ、車体(a)の後部にリヤバンパ(b2)が、第2組立ロボット(62)で取付けられる。
【0004】
詳しくは、第1組立ロボット(61)は、吸着パッド(17a)及びナットランナ(18)を備えていて、吸着パッド(17a)でフロントバンパ(b1)を吸着保持しつつ車体の前部へ当て、この状態を保ちながらナットランナ(18)でボルトを締付ける。第2組立ロボット(62)も同様である。
【0005】
すなわち、第1組立ロボット(61)において、吸着パッド(17a)でフロントバンパ(b1)を吸着保持しつつ運搬されている間は、ナットランナ(18)は休止している。そして、ナットランナ(18)でボルトを締付けている間は第1組立ロボット(61)は移動しない。第2組立ロボット(62)も同様である。
【0006】
フロントバンパ(b1)が運搬中には、ナットランナ(18)は止まっており、ナットランナ(18)の稼働率が高いとは言えない。ナットランナ(18)が締付け動作中には、第1組立ロボット(61))は移動しないため、稼働率が高いとは言えない。
ナットランナやロボットの稼働率を高めることが望まれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭63−2780号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、ナットランナやロボットの稼働率を高めることができるバンパビーム取付け技術を提供することを課題とする。
【課題を解決するための手段】
【0009】
請求項1に係るバンパビーム取付け装置は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け装置であって、
リヤバンパビームを把持して前側の車体の後部まで運搬する、又はフロントバンパビームを把持して後側の車体の前部まで運搬するバンパビーム運搬ロボットと、
車体に設けられている左側のバンパ取付け位置を検出する左の位置検出センサを備え、バンパビームに左側のボルトを締付ける左の締付けロボットと、
車体に設けられている右側のバンパ取付け位置を検出する右の位置検出センサを備え、バンパビームに右側のボルトを締付ける右の締付けロボットと、
前記バンパビーム運搬ロボット、左の締付けロボット及び右の締付けロボットを一括して制御するロボット制御部と、からなることを特徴とする。
【0010】
請求項2に係るバンパビーム取付け方法は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とする。
【0011】
請求項3に係るバンパビーム取付け方法は、車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明では、バンパビームを運搬するロボットと、ボルトの締付けを行うロボットとを、別々に設けたので、ボルトの締付け作業中に、バンパビームの運搬を行わせることができる。したがって、ナットランナ及びロボットの稼働率を高めることができる。
【0013】
また、バンパビームを運搬するロボットは、フロントバンパビームとリヤバンパビームとを交互に運搬し、ボルトを締付けるロボットはフロントバンパビームとリヤバンパビームとを交互に締付ける。そのため、ロボット群は、2台の車体の間を臨む位置に配置される。従来は、車体の前後にロボットを配置されていたが、本発明によれば、2台の車体の間にロボットが配置されているため、ロボットの設置面積を半減することができる。
【0014】
請求項2に係る発明では、バンパビームの運搬と、ボルトの締付けとを重複して実施する。すなわち、ボルトの締付け作業中に、バンパビームの運搬を行わせる。結果、ナットランナ及びロボットの稼働率を高めることができる。
さらには、バンパビーム運搬ロボットは、当該バンパビームの左右のボルトが締付けられた時点で、バンパビームから外され、次の作業に移される。結果、バンパビーム運搬ロボットの稼働率を高めることができる。
【0015】
請求項3に係る発明でも、バンパビームの運搬と、ボルトの締付けとを重複して実施する。すなわち、ボルトの締付け作業中に、バンパビームの運搬を行わせる。結果、ナットランナ及びロボットの稼働率を高めることができる。
さらには、バンパビーム運搬ロボットは、当該バンパビームの左右のボルトが締付けられた時点で、バンパビームから外され、次の作業に移される。結果、バンパビーム運搬ロボットの稼働率を高めることができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係るバンパビーム取付け装置を含む車両製造ラインの平面図である。
【図2】本発明に係るバンパビーム運搬ロボットの要部斜視図である。
【図3】バンパビーム運搬ロボットの作用説明図である。
【図4】本発明に係る締付けロボットの要部斜視図である。
【図5】バンパビーム運搬ロボットによるバンパビーム運搬開始時の作用図である。
【図6】本発明に係るバンパビーム取付け装置の全体的作用説明図である。
【図7】本発明に係るバンパビーム取付け方法を説明するフロー図である。
【発明を実施するための形態】
【0017】
本発明の実施の形態を添付図に基づいて以下に説明する。なお、図面は符号の向きに見るものとする。
【実施例】
【0018】
本発明の実施例を図面に基づいて説明する。
図1に示されるように、バンパビーム取付け装置10は、車両製造ライン11上を直列に搬送されてきた2個の車体12、13を対象とし、前側の車体12にリヤバンパビーム14を取付け、後側の車体13にフロントバンパビーム15を取付ける装置である。前側の車体12の中心と後側の車体13の中心との距離を、「1ピッチ」と定める。
【0019】
具体的には、バンパビーム取付け装置10は、台車上のバンパビームストッカ16中のリヤバンパビーム14を把持して前側の車体12の後部まで運搬する、又はフロントバンパビーム15を把持して後側の車体13の前部まで運搬するバンパビーム運搬ロボット17と、バンパビーム14、15に左側のボルトを締付ける左の締付けロボット18と、バンパビーム14、15に右側のボルトを締付ける右の締付けロボット19と、バンパビーム運搬ロボット17、左の締付けロボット18及び右の締付けロボット19を一括して制御するロボット制御部21と、からなる。
【0020】
ロボット制御部21は、後述の制御フローを実施する制御部である。
また、左の締付けロボット18は、左のボルト供給機22からボルトの供給を受け、右の締付けロボット19は、右のボルト供給機23からボルトの供給を受ける。
【0021】
なお、「前」は白抜き矢印の方向(車両製造ライン11の下流方向)、「後」はその逆方向(車両製造ライン11の上流方向)、「右」はバンパビームストッカ16側(運転席を基準に右)、「左」はその逆(運転席を基準に左)とする。
【0022】
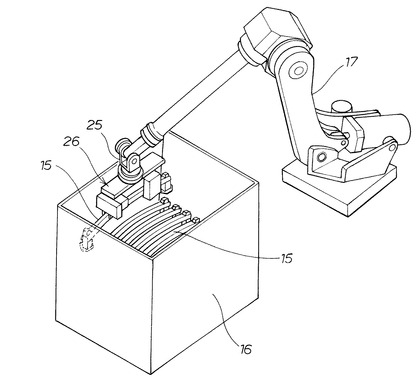
バンパビーム運搬ロボット17は、図2に示すように、ロボットアーム25にバンパビーム把持機構26を備えている。
このバンパビーム把持機構26は、細長いベース27と、このベース27の中央上部に設けられ、投光部28からレーザ光を発射し、反射光を受光部29で受けて、距離などを検出するサーチセンサ31と、ベース27に沿って設けられているレール32、32と、これらレール32、32に移動可能に設けられている左スライダ33及び右スライダ34と、これらのスライダ33、34を移動させるねじ軸35と、このねじ軸35を回転させる横移動アクチュエータ36と、左スライダ33及び右スライダ34に、爪開閉アクチュエータを介して取付けられている爪38とからなる。
【0023】
なお、ねじ軸35は、中央がねじ無し部39であり、このねじ無し部39の一方側に右ねじ部41が設けられ、他方側に左ねじ部42が設けられている。そのため、ねじ軸35を正転(又は逆転)させると、左スライダ33及び右スライダ34は、互いに離れるように同一速度で移動し、ねじ軸35を逆転(又は正転)させると、左スライダ33及び右スライダ34は、互いに接近するように同一速度で移動する。
そして、上述のねじ軸35を採用したことにより、ベース27の長手方向中心43から、左スライダ33までの距離Dlと右スライダ34までの距離Drは、距離Dl=距離Drの関係が常に保たれる。
【0024】
バンパビーム運搬ロボット17の作動を説明すると、上下の爪38、38を開き、バンパビームをサーチセンサ31で検出したら、爪38、38を閉じる。すると、図3に示されるように、バンパビーム14、15が保持される。サーチセンサ31で検出するために、把持ミスが発生しない。
バンパビーム14、15の長さが変更になる場合には、横移動アクチュエータ36により、左スライダ33と右スライダ34との間隔を変更すればよい。
【0025】
バンパビーム14、15は、細長いビーム本体44と、このビーム本体44の両端部から延ばした脚部45、45とからなり、脚部45に複数個(この例では3個)のボルト穴46を有するフランジ47を備えている。
【0026】
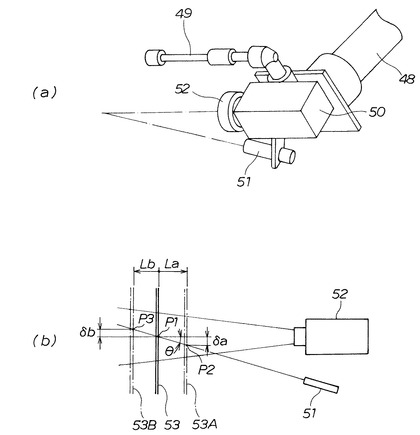
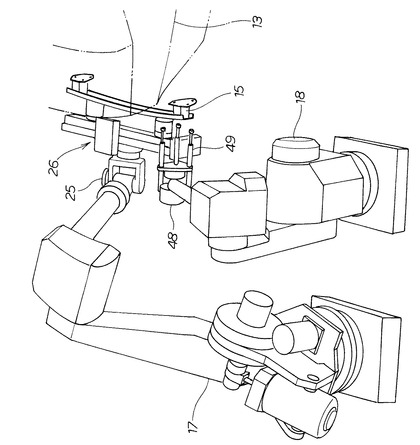
次に、左の締付けロボット18及び右の締付けロボット19の要部を説明する。
図4(a)に示すように、ロボットアーム48に、ナットランナ49と、バンパ取付け位置を検出する位置検出センサ50とが、設けられている。この位置検出センサ50も、投光部51からレーザ光を発射し、反射光を受光部52で受けて、距離を検出するものである。なお、ナットランナ49は、複数本であってもよい。
【0027】
なお、バンパ取付け位置は次に述べる方法で検出することもできる。
図4(b)に示すように、受光部52はカメラとし、投光部51からリヤバンパビーム14へレーザ光を発射する。検出対象物53が、正規の位置にあればレーザ光の衝突点はP1となる。
【0028】
仮に、想像線で示すように検出対象物53Aが、正規の位置よりもカメラ52側にあると、レーザ光の衝突点はP2は、カメラ軸直角方向にδaだけ、点P1からずれている。カメラ軸と投光部軸のなす角度θは既知である。カメラ軸に沿ったリヤバンパビーム14Aのずれ量Laは、δa/tanθの算式により求めることができる。
【0029】
また、想像線で示すように検出対象物53Bが、正規の位置よりも反カメラ52側にあると、レーザ光の衝突点はP3は、カメラ軸直角方向にδbだけ、点P1からずれている。カメラ軸に沿ったリヤバンパビーム14Aのずれ量Lbは、δb/tanθの算式により求めることができる。
【0030】
以上に述べたバンパビーム取付け装置の作用を図面に基づいて説明する。
先ず、図5に示すように、バンパビーム運搬ロボット17により、バンパビームストッカ16にストックされているフロントバンパビーム15をピックアップする。
次に、図6に示すように、バンパビーム運搬ロボット17により、フロントバンパビーム15を車体13の前部に臨ませる。続いて、締付けロボット18でボルトを締付ける。ただし、この間の作業手順は次に示すように、きめ細かく実施する。
【0031】
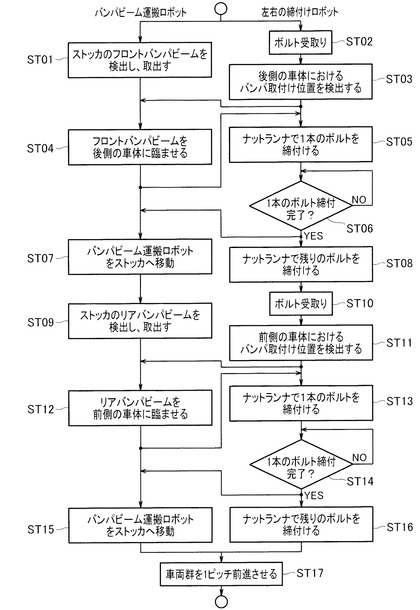
図7に基づいて本発明方法を説明する。なお、本発明方法では、バンパビーム運搬ロボットと、左右の締付けロボットは互いに独立して作動させることができるため、作動は左右に分けて示した。
先ず、バンパビーム搬送ロボットでストッカ中のフロントバンパビームを検出し、取出す(ST01)。並行して左右の締付けロボットはボルトを受取る(ST02)。左右の締付けロボットは、位置センサで後側の車体におけるバンパの取付け位置(位置座標)を検出する(ST03)。この位置情報はバンパビーム搬送ロボットへ伝達される。
【0032】
この位置情報に基づいて、バンパビーム搬送ロボットは、フロントバンパビームを後側の車体の前部の所定位置に臨ませる(ST04)。臨ませることが完了した情報は締付けロボット側に伝達され、締付けロボットは、ナットランナで1本のボルトを締付ける(ST05)。ST06で締付けの完了が確認できたら、バンパビーム搬送ロボットはフロントバンパビームを離し、ストッカへ戻る(ST07)。並行して、ナットランナで残りのボルトを締付ける(ST08)。
【0033】
以上で、フロントバンパビームの取付けが終了したので、リヤバンパビームの取付け作業を同様の手順で開始する。
【0034】
バンパビーム搬送ロボットでストッカ中のリヤバンパビームを検出し、取出す(ST09)。並行して左右の締付けロボットはボルトを受取る(ST10)。 なお、このST10は、ST02でリヤ、フロント両方をボルトを受取っている場合は、省略できる。
左右の締付けロボットは、位置センサで後側の車体におけるバンパの取付け位置(位置座標)を検出する(ST11)。この位置情報はバンパビーム搬送ロボットへ伝達される。
【0035】
この位置情報に基づいて、バンパビーム搬送ロボットは、リヤバンパビームを前側の車体の後部の所定位置に臨ませる(ST12)。臨ませることが完了した情報は締付けロボット側に伝達され、締付けロボットは、ナットランナで1本のボルトを締付ける(ST13)。ST14で締付けの完了が確認できたら、バンパビーム搬送ロボットはリヤバンパビームを離し、ストッカへ戻る(ST15)。並行して、ナットランナで残りのボルトを締付ける(ST16)。
【0036】
これで、リヤバンパビームの取付けが終了したので、車両群を1ピッチ前進させ(ST17)、ST01に戻る。
なお、以上のステップでは、フロントバンパビーム、リヤバンパビームの順で車体に取付けたが、リヤバンパビーム、フロントバンパビームの順で車体に取付けることは差し支えない。
【0037】
また、図6に示したように、締付けロボット18に3本のナットランナ49が設けられている場合には、3個のボルトが同時に締付けられ、うち1個の締付けが完了したら、ST07、ST15が開始される。
すなわち、締付けロボット18に1本のナットランナ49が設けられている場合と、複数本のナットランナ49が設けられている場合とで、作業手順が変わることはない。
【産業上の利用可能性】
【0038】
本発明は、車体にフロントパンパビーム及びリヤバンパビームを取付ける、バンパビーム取付け技術に好適である。
【符号の説明】
【0039】
10…バンパビーム取付け装置、11…車両製造ライン、12…前側の車体、13…後側の車体、14…リヤバンパビーム、15…フロントバンパビーム、17…バンパビーム運搬ロボット、18…左の締付けロボット、19…右の締付けロボット、21…ロボット制御部、49…ナットランナ、50…位置検出センサ。
【特許請求の範囲】
【請求項1】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け装置であって、
リヤバンパビームを把持して前側の車体の後部まで運搬する、又はフロントバンパビームを把持して後側の車体の前部まで運搬するバンパビーム運搬ロボットと、
車体に設けられている左側のバンパ取付け位置を検出する左の位置検出センサを備え、バンパビームに左側のボルトを締付ける左の締付けロボットと、
車体に設けられている右側のバンパ取付け位置を検出する右の位置検出センサを備え、バンパビームに右側のボルトを締付ける右の締付けロボットと、
前記バンパビーム運搬ロボット、左の締付けロボット及び右の締付けロボットを一括して制御するロボット制御部と、からなることを特徴とするバンパビーム取付け装置。
【請求項2】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とするバンパビーム取付け方法。
【請求項3】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とするバンパビーム取付け方法。
【請求項1】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け装置であって、
リヤバンパビームを把持して前側の車体の後部まで運搬する、又はフロントバンパビームを把持して後側の車体の前部まで運搬するバンパビーム運搬ロボットと、
車体に設けられている左側のバンパ取付け位置を検出する左の位置検出センサを備え、バンパビームに左側のボルトを締付ける左の締付けロボットと、
車体に設けられている右側のバンパ取付け位置を検出する右の位置検出センサを備え、バンパビームに右側のボルトを締付ける右の締付けロボットと、
前記バンパビーム運搬ロボット、左の締付けロボット及び右の締付けロボットを一括して制御するロボット制御部と、からなることを特徴とするバンパビーム取付け装置。
【請求項2】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とするバンパビーム取付け方法。
【請求項3】
車両製造ライン上を直列に搬送されてきた2個の車体を対象とし、前側の車体にリヤバンパビームを取付け、後側の車体にフロントバンパビームを取付ける、バンパビーム取付け方法であって、
左右の締付けロボットに備えられている位置検出センサで前記前側の車体のバンパ取付け位置を検出するステップと、
検出された位置へバンパビーム運搬ロボットにより前記リヤバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記リヤバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはリヤバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
左右の締付けロボットに備えられている位置検出センサで前記後側の車体のバンパ取付け位置を検出するステップと、
前記残りのボルトを締付けるステップ及びバンパ取付け位置を検出するステップと並行して行われ、検出された位置へバンパビーム運搬ロボットにより前記フロントバンパビームを運搬するステップと、
バンパビーム運搬ロボットで支持されている前記フロントバンパビームは左側に複数個のボルト穴を有し、右側にも複数個のボルト穴を有し、前記左側のボルト穴の少なくとも1個に左の締付けロボットでボルトを挿入し、車体側にねじ込み、前記右側のボルト穴の少なくとも1個に右の締付けロボットでボルトを挿入し、車体側にねじ込むステップと、
少なくとも左右各1本のボルトが取付けられた後に、バンパビーム運搬ロボットはフロントバンパビームから外され、左右の締付けロボットで残りのボルトを締付けるステップと、
締付けが完了したら、前記2個の車体のピッチだけ、前記車両製造ライン上の車体群を一括して前進させるステップと、からなることを特徴とするバンパビーム取付け方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−264907(P2010−264907A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−118658(P2009−118658)
【出願日】平成21年5月15日(2009.5.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月15日(2009.5.15)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]