
バーコード読取り装置、バーコード読取り方法、バーコード読取りプログラム及びライブラリ装置
【課題】カートリッジ等の被搬送物からのバーコードの読取りに関し、把持された被搬送物に対するバーコード読取りを可能とする。
【解決手段】磁気テープを格納したカートリッジ(4)等の被搬送物に付されたバーコードラベル(10)のバーコード読取り部(20)を被搬送物を掴むハンド部(6)の被搬送物の対向面部に備えるとともに、バーコード読取り部にバーコードラベルに光を照射する光源(発光素子22)と、バーコードラベルからの反射光を受光する受光部(受光素子24)とを備え、バーコードラベルを光の走査により検出するので、被搬送物の把持とバーコードラベルの読取りとを同時的に行える構成とする。
【解決手段】磁気テープを格納したカートリッジ(4)等の被搬送物に付されたバーコードラベル(10)のバーコード読取り部(20)を被搬送物を掴むハンド部(6)の被搬送物の対向面部に備えるとともに、バーコード読取り部にバーコードラベルに光を照射する光源(発光素子22)と、バーコードラベルからの反射光を受光する受光部(受光素子24)とを備え、バーコードラベルを光の走査により検出するので、被搬送物の把持とバーコードラベルの読取りとを同時的に行える構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気テープカードリッジ(以下単に「カートリッジ」と称する)等に付されたバーコードラベルを読み取るバーコード読取り装置に関し、特に、バーコードラベルからの反射光によりバーコードを読み取るバーコード読取り装置、バーコード読取り方法、バーコード読取りプログラム及びライブラリ装置に関する。
【背景技術】
【0002】
各種データの書込み又は読出しに用いられる磁気テープを格納したカートリッジには、ボリューム識別子としてバーコードラベルが使用されている。このカートリッジをセルに収納して保管するライブラリ装置には、磁気テープに対するデータの読取り/書き出しをする磁気テープドライブ装置や、セルと磁気テープドライブ装置との間でカートリッジを搬送するロボット機構部が設置されているとともに、ロボット機構部や磁気テープドライブ装置等の機能部を制御するコントローラが設置されており、ロボット機構部にはカートリッジからバーコードラベルを読み取るバーコードリーダが設置されている。バーコードリーダに読み取られたボリューム情報はカートリッジの特定等に用いられる。バーコードリーダには、ポリゴンミラーやレーザ光源等を用いるレーザタイプや、レンズとCCD(Charge Coupled Device )素子を組み合せたCCDタイプが知られている。
【0003】
このようなバーコード読取りに関し、特許文献1には、カード型電子機器の筐体に発光素子と受光素子とを備え、発光素子の光をバーコードに当て、その反射光を受光素子で受光してバーコードを読み取ることが開示されている。また、特許文献2には、ライブラリ装置において、セル内にある記録媒体のバーコードラベルからの反射光により、バーコードを読み取ることが開示されている。
【特許文献1】特開平3−171248号公報(第1頁右欄第12行以下等)
【特許文献2】特開平9−91930号公報(段落番号0021、図3等)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ポリゴンミラー、レンズ、CCD等を用いたバーコードリーダでは製造コストが高くなり、レーザ光をバーコードラベル全体に照射することはレーザ光源とバーコードラベルとの距離が長くなり、レンズの半画角等の特性から、バーコードリーダを小型化することができない。このようなバーコードリーダでは、カートリッジを搬送するロボット機構部に設置することができないし、ライブラリ装置内にバーコードリーダの占める割合が大きくなると、ロボット機構部の移動範囲やセルの設置が妨げられる。小型のライブラリ装置では、カートリッジの収納効率が低下することにもなる。
【0005】
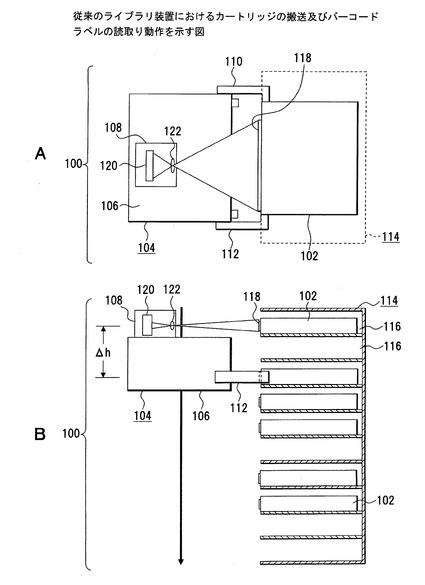
例えば、図15のA及びBに示すように、このライブラリ装置100では、カートリッジ102の搬送ロボット104のハンド部106にあるバーコードリーダ108が設置されている。ハンド部106の側部には、カートリッジ102を把持するためのグリッパ110、112が設けられている。カラム114は、カートリッジ102を収納する複数のセル116の集合体である。搬送ロボット104は、カラム114の上下方向にハンド部106を移動させ、読取り対象であるカートリッジ102のバーコードラベル118にバーコードリーダ108を位置付け、バーコードラベル118からバーコードの読取りが行われる。
【0006】
この場合、バーコードリーダ108は、CCD120、レンズ122等を備えた構成であって、ハンド部106の上面部に比較的大きな体積を有するものである。
【0007】
このようなバーコードリーダ108では、その読取り位置と、ハンド部106のグリッパ110、112の把持位置とが異なっており、図15のBの例では、高さΔhだけの差が生じている。このようなバーコードリーダ108を用いた場合には、バーコード読取りによるボリューム登録の後、ハンド部106の位置を把持すべきカートリッジ102側に変更し、読取りとは別のカートリッジ把持のための工程が必要となる。即ち、ライブラリ装置100にカートリッジ102を投入した際、バーコードラベル118の読取り工程と、カートリッジ102のセル116への搬送工程の2工程を必要としている。このため、ライブラリ装置100に対するカートリッジ102の投入処理に時間を要するという課題があった。
【0008】
斯かる課題について、特許文献1、2には、その開示や示唆はなく、それを解決する構成や着想はない。
【0009】
そこで、本発明の第1の目的は、カートリッジ等の被搬送物からのバーコードの読取りに関し、把持された被搬送物に対するバーコード読取りを可能とすることにある。
【0010】
また、本発明の第2の目的は、カートリッジ等の搬送物に付されたバーコードの読取りに関し、被搬送物を把持するとともに、バーコードの読取り機能を持つハンド部の小型化を図ることにある。
【0011】
また、本発明の第3の目的は、カートリッジ等の搬送物に付されたバーコードの読取りに関し、被搬送物を把持するとともに、バーコードの読取り機能を持つハンド部の移動範囲を拡大することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明は、磁気テープを格納したカートリッジ等の被搬送物に付されたバーコードラベルのバーコード読取り部を前記被搬送物を掴むハンド部の被搬送物の対向面部に備えるとともに、バーコード読取り部にバーコードラベルに光を照射する光源と、バーコードラベルからの反射光を受光する受光部とを備え、バーコードラベルを光の走査により検出するので、被搬送物の把持とバーコードラベルの読取りとを同時的に行える構成としたことにより、上記目的を達成している。
【0013】
そこで、本発明の第1の側面は、バーコード読取り装置であって、被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取る構成である。斯かる構成とすれば、ハンド部に掴まれた被搬送物からバーコードの読取りが行え、上記目的が達成される。
【0014】
このバーコード読取り装置において、好ましくは、前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としてもよく、斯かる構成によっても、上記目的が達成される。
【0015】
上記バーコード読取り装置において、前記バーコード読取り部は、好ましくは、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備える構成としてもよく、斯かる構成によっても、上記目的が達成される。
【0016】
上記バーコード読取り装置において、好ましくは、前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備える構成としてもよい。斯かる構成によれば、バーコードと平行にバーコードを走査することができ、ハンド部に掴まれた被搬送物からバーコードの読取りを行える。
【0017】
また、本発明の第2の側面は、バーコード読み取り方法であって、被搬送物をハンド部により掴む処理と、前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理とを含む構成である。斯かる構成によっても、上記目的が達成される。
【0018】
このバーコード読取り方法において、好ましくは、前記バーコードに対して照射する光を走査する処理と、前記バーコードからの反射光を前記光の走査に対応して検出する処理とを含む構成としてもよい。
【0019】
また、本発明の第3の側面は、コンピュータによって実行されるバーコード読取りプログラムであって、ハンド部に被搬送物を掴む指示情報を出力するステップと、前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップとを含む構成である。
【0020】
また、本発明の第4の側面は、カートリッジを保管するライブラリ装置であって、前記カートリッジを搬送する搬送部と、前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部とを備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取る構成である。
【0021】
斯かる構成によれば、ハンド部に把持されたカートリッジからバーコードを読み取ることができ、しかも、ハンド部の筐体内にバーコード読取り部が内蔵されているので、ハンド部が小型化され、その移動範囲が拡大される。
【0022】
このライブラリ装置において、好ましくは、前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としてもよく、斯かる構成によっても、同様に上記目的が達成される。
【0023】
上記ライブラリ装置において、前記バーコード読取り部は、好ましくは、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備える構成としてもよい。斯かる構成によっても、同様に上記目的が達成される。
【発明の効果】
【0024】
本発明によれば、次の効果が得られる。
【0025】
(1) 被搬送物を掴むハンド部に、被搬送物のバーコードを読み取るバーコード読取り部を内蔵させたので、バーコード読取り装置の小型化を図ることができ、又は被搬送物の把持とバーコード読取りとを同時的に行うことができる。
【0026】
(2) ライブラリ装置において、磁気テープを内蔵したカートリッジを掴むハンド部に、カートリッジのバーコードを読み取るバーコード読取り部を内蔵させたので、カートリッジの把持とバーコード読取りとを同時的に行うことができる。
【0027】
(3) ライブラリ装置において、磁気テープを内蔵したカートリッジを掴むハンド部にカートリッジのバーコードを読み取るバーコード読取り部を内蔵させたので、ハンド部の移動範囲を拡大することができ、カートリッジの収納空間を拡大でき、又は同一の収納空間であれば、ライブラリ装置の小型化を図ることができる。
【発明を実施するための最良の形態】
【0028】
〔第1の実施の形態〕
【0029】
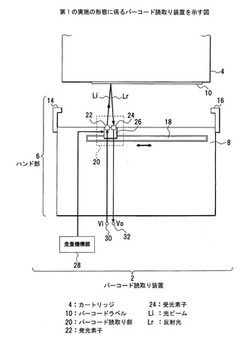
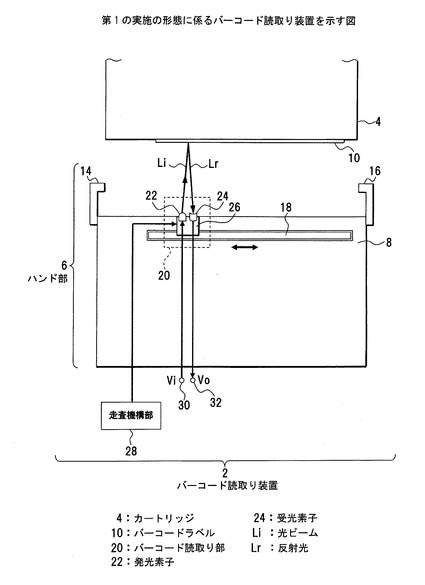
本発明の第1の実施の形態について、図1、図2及び図3を参照して説明する。図1は、バーコード読取り装置の構成例を示す図、図2は、バーコードラベルが付されたカードリッジ(磁気テープカートリッジ)を示す図、図3は、バーコードの読取り動作を示す図である。
【0030】
このバーコード読取り装置2は、被搬送物としてのカートリッジ4を把持するハンド部6のハンドフレーム部8に搭載されており、搬送途上のカートリッジ4のバーコードラベル10からバーコード12(図2)を読み取る構成である。ハンドフレーム部8には、左右に進退して開閉されるグリッパ14、16が取り付けられており、これらグリッパ14、16にカートリッジ4が把持される。このカートリッジ4のバーコードラベル10からバーコード12を読み取るため、ハンドフレーム部8にはレール部18が備えられ、このレール部18を以てバーコードラベル10と平行に移動させるバーコード読取り部20が設置されている。バーコード読取り部20には、バーコードラベル10に光ビームLiを照射する点光源としての発光素子22と、バーコードラベル10からの反射光Lrを受光する受光素子24が設置されている。発光素子22は例えば、発光ダイオードで構成され、受光素子24は例えば、受光トランジスタで構成されている。これら発光素子22及び受光素子24は筐体部26に搭載され、発光素子22、受光素子24及び筐体部26を以てバーコード読取りモジュールが構成されている。
【0031】
バーコード読取り部20は走査機構部28によってバーコードラベル10と平行に走査される。入力端子30に駆動電圧Viを印加すると、発光素子22が点光源として発光し、光ビームLiがバーコードラベル10に照射される。バーコードラベル10からの反射光Lrは受光素子24に受光され、受光素子24から検出信号Voが得られ、この検出信号Voが出力端子32から取り出すことができる。この検出信号Voのレベル変化からバーコード12を読み取ることができる。
【0032】
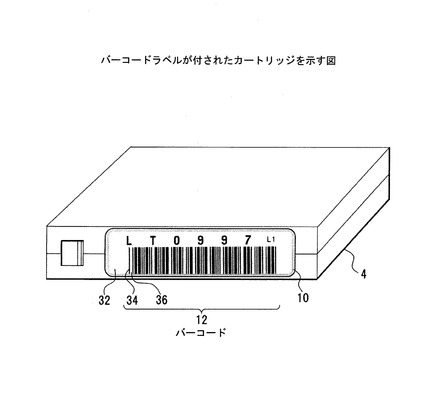
バーコード12は、図2及び図3に示すように、白地32に一定の長さを持つバー34の太さを異ならせて配列させ、各バー34の間に異なる幅の間隔36が設定されることにより、ボリューム識別子等を表すバーコードデータが書き込まれたものである。このようなバーコード12に光ビームLiを照射し、走査機構部28によりバーコード読取り部20をバーコード12に沿って走査させると、バーコード12のバー34を表すレベルの異なる出力信号Voが得られる。
【0033】
この場合、図3のAに示すバーコードラベル10では、その長さW1に対応し、バーコード読取り部20を走査して光ビームLiを照射すると、受光素子24には図3のBに示すように、バーコード12のバー34とその間隔36等に対応し、パルス状の検出信号Voが得られる。このバーコードラベル10では、その長さW1の間に、クワイエットゾーンQZ、スタートビットSB、キャラクタデータCD、ストップビットSTB及びクワイエットゾーンQZが設定されている。そこで、受光信号からバーコードデータとしてキャラクタデータCDを読み取ることができる。
【0034】
この場合、走査機構部28によるバーコード読取り部20の走査は、バーコードラベル10の長さW1、W2に応じて行えばよく、バーコードラベル10が短い長さW2である場合には、図3のCに示すように、その長さに応じた受光信号が得られる。
【0035】
このようなバーコード読取り装置2及びその読取り方法によれば、ハンド部6に把持されるカートリッジ4のバーコードラベル10からバーコード12を簡易な機構により読み取ることができ、しかも、ハンド部6で搬送されるカートリッジ4のボリューム識別子を搬送途上で容易に読み取ることができる。
【0036】
〔第2の実施の形態〕
【0037】
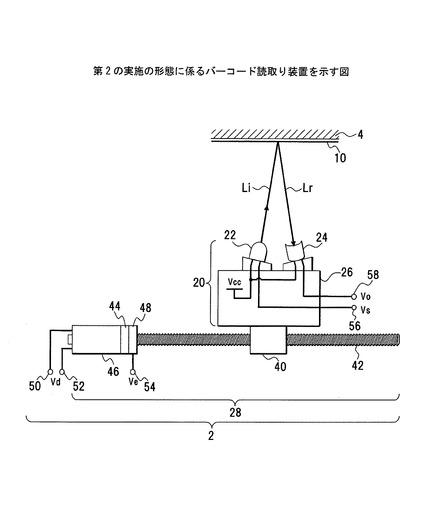
次に、本発明の第2の実施の形態について、図4を参照して説明する。図4は、バーコード読取り装置の構成例を示す図である。図4において、図1と同一部分には同一符号を付してある。
【0038】
この実施の形態では、走査機構部28が、バーコード読取り部20をバーコードラベル10に平行に走査するため、スライダ40、ネジ軸42、ギヤボックス44、駆動用モータ46等で構成されている。即ち、バーコード読取り部20が搭載されたスライダ40は、ストリングスクリューやボールネジと称されるネジ軸42に取り付けられ、ネジ軸42の回転により左右に移動する。ネジ軸42にはギヤボックス44を介して駆動用モータ46が連結されている。ギヤボックス44には回転を検出する回転検出手段としてエンコーダ48が設置される。
【0039】
駆動用モータ46に対し、駆動入力端子50、52からモータ駆動電圧Vdを印加すると、駆動用モータ46は定速度で回転し、その回転がギヤボックス44を介してネジ軸42に伝達し、ネジ軸42を回転させる。このネジ軸42の定速度により、スライダ40が移動し、バーコード読取り部20がバーコードラベル10に平行に走査される。ネジ軸42の回転は、エンコーダ48によって検出され、出力端子54からその回転検出出力Veが得られる。
【0040】
また、発光素子22及び受光素子24の一方の端子には共通に電源電圧Vccが加えられており、発光素子22の一方の端子にはスイッチング制御入力端子56、受光素子24の一方の端子には出力端子58が設けられている。そこで、スイッチング制御入力端子56にスイッチング制御信号Vsが加えられると、発光素子22が発光し、光ビームLiがバーコードラベル10のバーコード12に照射される。この光ビームLiの走査により、受光素子24には反射光Lrが検出され、出力信号Voが得られる。この出力信号Voは出力端子58を通して取り出される。
【0041】
従って、斯かる実施の形態によっても、バーコード読取り部20からバーコード12を読み取ることができ、第1の実施の形態と同様に、搬送中のカートリッジ4からボリューム識別子を読み取ることができる。
【0042】
〔第3の実施の形態〕
【0043】
次に、本発明の第3の実施の形態について、図5、図6、図7及び図8を参照して説明する。図5は、ライブラリ装置の構成を示す図、図6は、ライブラリ装置におけるバーコード読取り装置の構成を示す図、図7は、ハンド部、バーコード読取り装置及びカートリッジの関係を示す図、図8は、コントローラの一例を示すブロック図である。図5、図6及び図7において、図1又は図4と同一部分には同一符号を付してある。
【0044】
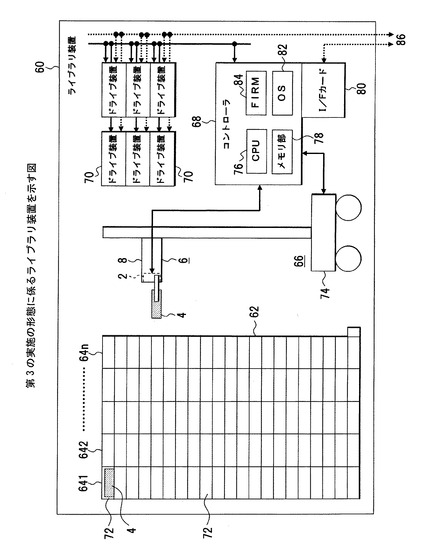
このライブラリ装置60には、図5に示すように、筐体部62と、複数のカラム641、642・・・64nと、搬送ロボット66と、コントローラ68と、複数のドライブ装置70とが設置されている。
【0045】
各カラム641、642・・・64nは、セル72の集合体であり、各セル72にはカートリッジ4が保管される。カートリッジ4は、既述した通り、磁気テープカートリッジであり、他の記録媒体であってもよい。
【0046】
搬送ロボット66は、各セル72から任意のドライブ装置70、各ドライブ装置70から任意のセル72にカートリッジ4を搬送するための搬送手段である。そこで、この搬送ロボット66は、カートリッジ4を把持するハンド機構を備えるハンド部6を備えるとともに、ハンド部6を任意のセル72やドライブ装置70に移送するためのロボット機構部としてX軸、Y軸又はZ軸方向の移送機構74を備えている。
【0047】
そして、ハンド部6には、バーコード読取り装置2が設置されており、このバーコード読取り装置2は、既述の通り、ハンド部6に把持されるカートリッジ4のバーコードラベル10を走査し、バーコード12を読み取る。
【0048】
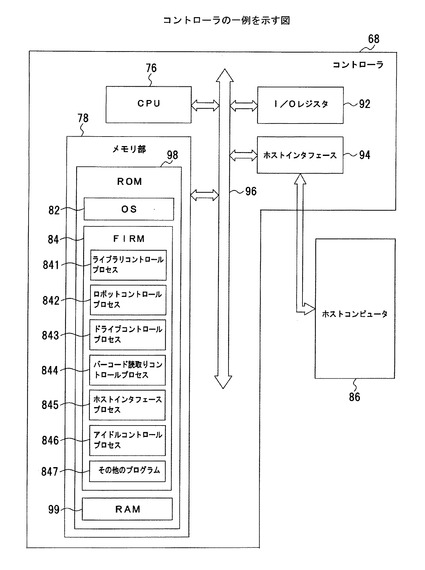
コントローラ68は、コンピュータによって構成され、搬送ロボット66、ハンド部6、バーコード読取り装置2及びドライブ装置70等を制御する。このコントローラ68には、CPU(Central Processing Unit )76、メモリ部78、インタフェース(I/F)カード80等のハードウェアの他、オペレーティングシステム(OS)82、ファームウェア(FIRM)84等のソフトウェアが搭載されている。I/Fカード80は、コントローラ68の入出力部を構成し、このI/Fカード80を通して外部のホストコンピュータ86(図8)に接続されている。
【0049】
ドライブ装置70は、コントローラ68によって制御されるとともに、ホストコンピュータ86(図8)に接続され、コントローラ68又はホストコンピュータ86からのデータをカートリッジ4の磁気テープに対して書き込み、磁気テープから読み出したデータをコントローラ68やホストコンピュータ86に出力する。図5において、実線はコントローラ68との接続、破線はホストコンピュータ86との接続を示している。
【0050】
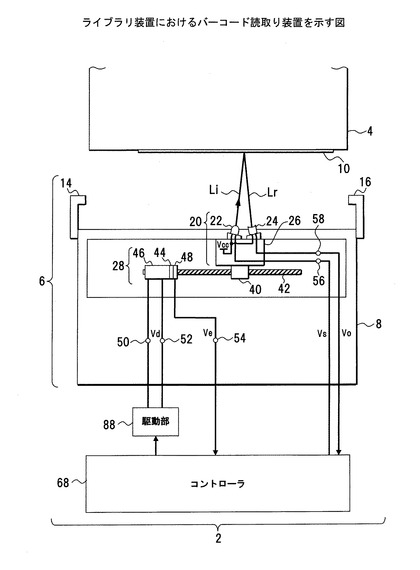
バーコード読取り装置2は、図5に示すように、ハンド部6のハンドフレーム部8の前面側に搭載されており、既述の通り、バーコード読取り部20、走査機構部28として、駆動用モータ46、ギヤボックス44、スライダ40及びネジ軸42等で構成されている。これらの構成は、図4を参照して説明したので、その説明を省略する。
【0051】
また、図6に示すように、駆動用モータ46に接続された駆動部88はコントローラ68によって制御され、駆動電圧Vdを駆動用モータ46に加える。駆動用モータ46に連結されたエンコーダ48の回転検出出力Veは、回転情報としてコントローラ68に加えられている。また、発光素子22には、コントローラ68からスイッチング制御信号Vsが加えられ、受光素子24の出力信号Voがコントローラ68に加えられている。
【0052】
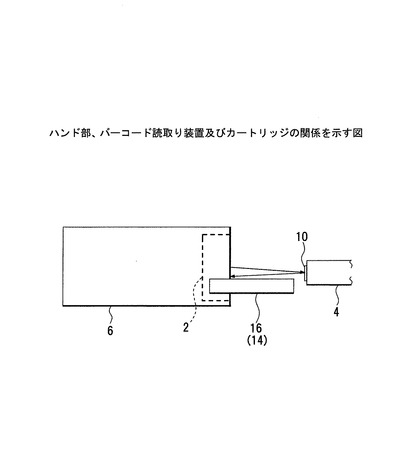
そして、バーコード読取り装置2は、図7に示すように、ハンド部6のカートリッジ4の対向面部に設置され、グリッパ14、16によるカートリッジ4の把持状態、又は把持動作前にハンド部6が把持体制に入った状態でバーコードラベル10からバーコード12を読み取ることができる。
【0053】
また、コントローラ68は、図8に示すように、CPU76、メモリ部78、I/Oレジスタ92、ホストインタフェース94等を備え、これらはバス96によって接続されている。メモリ部78には、ROM(Read-Only Memory)98及びRAM(Random-Access Memory)99等が備えられ、ROM98にはOS82、FIRM84の他、各種のプログラムが格納されている。FIRM84にはライブラリコントロールプロセス841、ロボットコントロールプロセス842、ドライブコントロールプロセス843、バーコード読取りコントロールプロセス844、ホストインタフェースプロセス845、アイドルコントロールプロセス846、その他のプログラム847が含まれている。
【0054】
そして、コントローラ68は、ハンド部6をセル72のカートリッジ4に水平に移動させて位置決めし、バーコード読取り装置2のバーコード読取り部20をバーコードラベル10に対し、水平に走査し、バーコード12の読取りを行う。
【0055】
即ち、ハンド部6がカートリッジ4を把持した状態で、バーコード読取り装置2のバーコード読取り部20をバーコードラベル10に対して平行かつ水平に走査することができる。この走査により光ビームLiを照射し、その反射光Lrを検出でき、バーコード12の黒のバー34と白の間隔36を検出し、判定することができる。
【0056】
しかも、このバーコード読取り装置2では、バーコードラベル10に対してバーコード読取り部20を近接させることができるので、外乱光の影響を低減でき、その際、バーコードラベル10に印刷されたバー34の幅を的確に検出でき、定速度で走査させることができ、バーコード12の読取り率の向上を図ることができる。
【0057】
そして、バーコード読取り装置2の制御系は、ライブラリ装置60のコントローラ68に内蔵することができ、バーコード読取りの専用回路は不要であり、駆動部88(図6)もコントローラ68に内蔵させることができる。
【0058】
次に、ライブラリ装置60、バーコード読取り装置2の動作を説明する。
【0059】
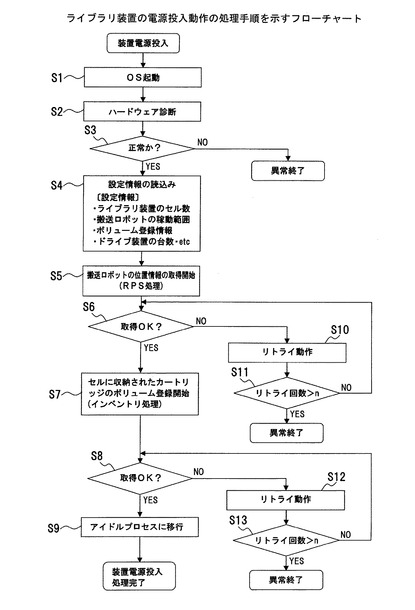
ライブラリ装置60の電源投入時の動作について、図9を参照して説明する。図9は、ライブラリ装置の電源投入時の動作を示すフローチャートである。
【0060】
電源を投入すると、OS82が起動し(ステップS1)、ハードウェア診断が開始され(ステップS2)、診断の結果、正常か否かの判定が行われ(ステップS3)、装置が異常であれば(ステップS3のNO)、この動作を終了する。また、正常であれば、設定情報の読込みが行われる(ステップS4)。この場合、設定情報は、ライブラリ装置60のセル数、搬送ロボット66の稼動範囲、ボリューム登録情報、ドライブ装置70の台数等である。
【0061】
このような設定情報の読込みの完了後、RPS(Relative Positioning System )処理により、搬送ロボット66の位置情報の取得が開始される(ステップS5)。RPS処理は、搬送ロボット66とセル72の相対位置情報の取得処理であって、機械的、物理的なばらつきを吸収するための処理である。
【0062】
この処理の後、位置情報の取得が行われたか否かの判断をし(ステップS6)、位置情報が取得できれば(ステップS6のYES)、セル72に収納されたカートリッジ4のボリューム登録を行う(ステップS7)。このボリューム登録はインベントリ処理によって実行され、このインベントリ処理は、カートリッジ4のバーコードラベル10からバーコード12を読み取る処理である。
【0063】
このインベントリ処理の後、ボリューム情報の取得ができたか否かが判定され(ステップS8)、ボリューム情報が取得できれば(ステップS8のYES)、アイドルプロセスに移行し(ステップS9)、この電源投入処理を終了する。
【0064】
また、ステップS6において、搬送ロボット66の位置情報の取得ができなければ(ステップS6のNO)、搬送ロボット66の位置情報の取得のためのリトライ動作を実行し(ステップS10)、そのリトライ回数が予め設定された所定回数nに到達したか否かを監視し(ステップS11)、リトライ回数は所定回数nに到達するまでリトライ動作を繰り返し、搬送ロボット66の位置情報の取得を試みる。リトライ回数が所定回数nを超えれば(ステップS11のYES)、装置異常と判定し、この電源投入処理を終了する。
【0065】
また、ステップS8において、ボリューム情報の取得ができなければ(ステップS8のNO)、ボリューム情報の取得のためのリトライ動作を実行し(ステップS12)、そのリトライ回数が予め設定された所定回数nに到達したか否かを監視し(ステップS13)、リトライ回数は所定回数nに到達するまでリトライ動作を繰り返し、カートリッジ4のボリューム情報の取得を試みる。リトライ回数が所定回数nを超えれば(ステップS13のYES)、装置異常と判定し、この電源投入処理を終了する。
【0066】
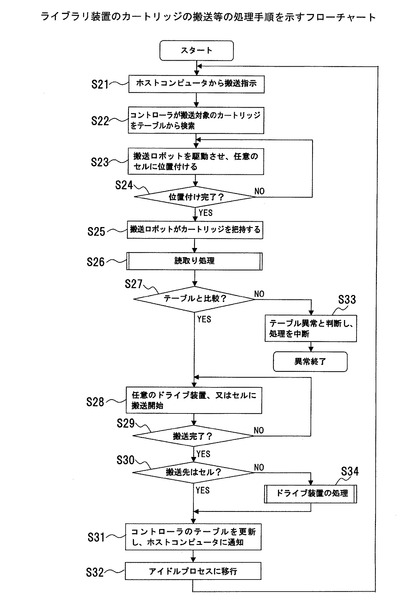
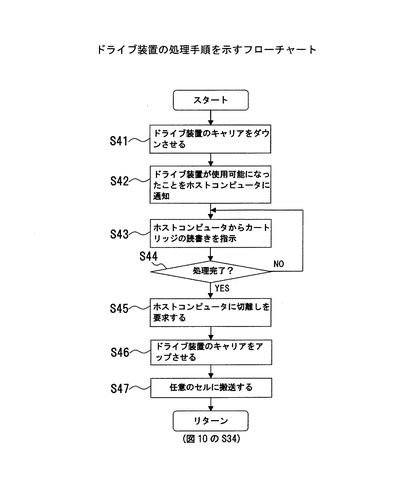
次に、カートリッジの搬送動作について、図10及び図11を参照して説明する。図10は、ライブラリ装置のカートリッジの搬送動作を示すフローチャート、図11は、ドライブ装置の処理手順を示すフローチャートである。
【0067】
ホストコンピュータ86からの搬送指示により(ステップS21)、コントローラ68は、メモリ部78のテーブルを検索し、搬送対象のカートリッジ4を特定し(ステップS22)、搬送ロボット66を移動させ、任意のセル72に位置付ける(ステップS23)。セル72に対する搬送ロボット66の位置付けが完了したか否かを判定し(ステップS24)、位置付けが完了するまで位置付け動作を継続し、位置付けが完了すれば(ステップS24のYES)、搬送ロボット66はカートリッジ4を把持する(ステップS25)。このカートリッジ4に対し、バーコード12の読取り処理(ステップS26)を実行する。この読取り処理は、図12に示すフローチャートによって実行される。この処理により、カートリッジ12から読み取ったボリューム情報をテーブルの情報と比較し(ステップS27)、一致すれば、任意のドライブ装置70又はセル72に搬送を開始し(ステップS28)、その搬送を監視(ステップS29)する。その搬送が完了すれば(ステップS29のYES)、搬送先がセル72であるか否かを判定し(ステップS30)、搬送先がセル72であれば(ステップS30のYES)、コントローラ68のメモリ部78のテーブルを更新し、ホストコンピュータ86に通知し(ステップS31)、アイドルプロセスに移行し(ステップS32)、ホストコンピュータ86からの搬送指示(ステップS21)にリターンする。
【0068】
ステップS27において、テーブルの比較により、テーブルにボリューム情報がなければ、テーブル異常と判断し、処理を中断し(ステップS33)、この処理を終了させる。
【0069】
また、ステップS30において、搬送先がセル72でなければ(ステップS30のNO)、図11に示すドライブ装置の処理(ステップS34)を実行する。
【0070】
ドライブ装置の処理は、図11に示すように、ドライブ装置70のキャリアをダウンさせ(ステップS41)、ドライブ装置70が使用可能になったことをホストコンピュータ86に通知し(ステップS42)、ホストコンピュータ86からカートリッジ4の磁気テープの読み書きの指示を受け、その処理を実行する(ステップS43)。この処理は監視され(ステップS44)、処理が完了すれば(ステップS44のYES)、ドライブ装置70からホストコンピュータ86に対して切離しを要求し(ステップS45)、ドライブ装置70のキャリアをアップさせ(ステップS46)、任意のセル72に搬送し(ステップS47)、ステップS34(図10)にリターンする。
【0071】
次に、バーコードの読取り処理について、図12及び図13を参照して説明する。図12は、バーコードの読取りの処理手順を示すフローチャート、図13は、バーコードの読取り動作を示す図である。
【0072】
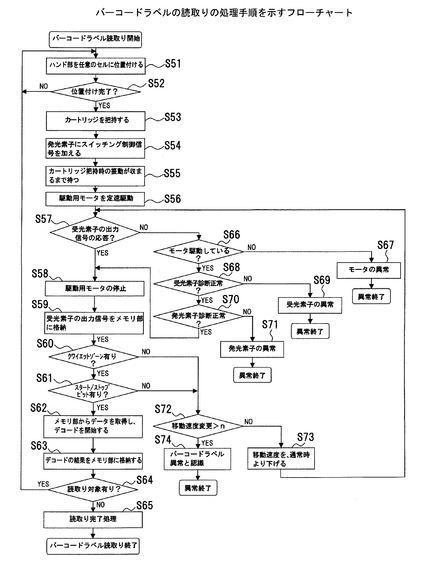
バーコードの読取り処理では、搬送ロボット66を動作させ、ハンド部6を任意のセル72に位置付ける動作を実行し(ステップS51)、この位置付け動作を監視し(ステップS52)、ハンド部6が任意のセル72に対する位置付けが完了すれば(ステップS52のYES)、グリッパ14、16によってカートリッジ4を把持し(ステップS53)、発光素子22をスイッチング制御信号の入力により発光させ(ステップS54)、カートリッジ4の把持による振動の収束する一定時間T例えば、100〔ms〕だけ待機し(ステップS55)、この待機時間の経過の後、駆動用モータ46を定速度で駆動させ(ステップS56)、バーコードラベル10に光ビームLiを照射する。
【0073】
この光照射により、バーコード12から反射光Lrが得られるので、受光素子24の出力信号の応答を監視し(ステップS57)、受光素子24の出力信号を検出する。出力信号の応答があった場合(ステップS57のYES)、駆動用モータ46を停止させ(ステップS58)、受光素子24の出力信号をメモリ部78に格納し(ステップS59)、クワイエットゾーンの有無を監視し(ステップS60)、クワイエットゾーンがあった場合には(ステップS60のYES)、スタート/ストップビットの有無を監視し(ステップS61)、スタート/ストップビットがあった場合(ステップS61のYES)には、メモリ部78からデータを取得し、デコードを開始する(ステップS62)。そのデコード結果をメモリ部78に格納する(ステップS63)。
【0074】
読取り対象の有無を監視し(ステップS64)、読取り対象がなければ(ステップS64のNO)、読取り完了処理(ステップS65)を実行し、バーコードラベル10の読取りを終了する。この場合、読取り対象があれば(ステップS64のYES)、ステップS51にリターンする。
【0075】
また、ステップS57において、受光素子24の出力信号が得られないならば(ステップS57のNO)、何らかの異常が予想されるので、駆動用モータ46の駆動について判定し(ステップS66)、駆動用モータ46が回転していないならば(ステップS66のNO)、モータ異常と判定し(ステップS67)、この処理を終了する。
【0076】
また、駆動用モータ46が駆動しているならば(ステップS66のYES)、受光素子24の診断を行い(ステップS68)、受光素子24に異常があれば(ステップS68のNO)、異常と判定し(ステップS69)、この処理を終了する。
【0077】
また、受光素子24が正常であれば(ステップS68のYES)、発光素子22の診断を行い(ステップS70)、発光素子22に異常があれば(ステップS70のNO)、異常と判定し(ステップS71)、この処理を終了する。発光素子22が正常であれば(ステップS70のYES)、ステップS58に移行する。
【0078】
また、ステップ60において、クワイエットゾーンがなければ(ステップ60のNO)、移動速度を段階的に変更し、その変更回数が所定回数nを超えたか否かを監視し(ステップ72)、所定回数n以下であるならば(ステップ72のNO)、移動速度を通常時により下げ(ステップ73)、ステップ57に移行する。その変更回数が所定回数nを超えてもバーコード12を検出できないならば(ステップ72のYES)、そのバーコードラベル10は異常と認識し(ステップ74)、この処理を終了する。
【0079】
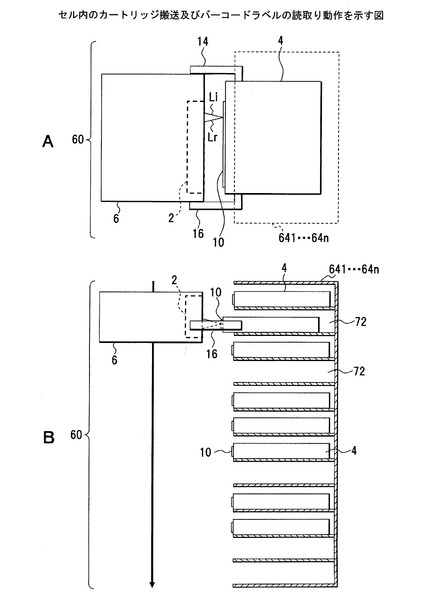
そして、図13のAに示すように、任意のセル72にハンド部6が位置付けされると、バーコード読取り装置2のバーコード読取り部20の発光素子22からカートリッジ4のバーコードラベル10に光ビームLiが照射され、その反射光Lrが受光素子24に検出される。このようなバーコードラベル10の検出処理と、カートリッジ4の搬送処理とは、図13のBに示すように、単一のプロセスで行うことができる。
【0080】
以上説明したように、バーコード読取り装置2がハンド部6の前面部に設置されているので、カートリッジ4のバーコードラベル10をハンド部6の把持操作の途上で読み取ることができる等、読取り動作と搬送動作とを一体化することができる。即ち、ライブラリ装置60の外からカートリッジ4が投入された際に、セル72からカートリッジ4を把持し、バーコードラベル10の読込み処理と任意のセル72への移動処理を一プロセスで行え、処理の単純化とともに、高速化を図ることができる。
【0081】
また、斯かる構成は、バーコード読取り装置2がハンド部6の高さ内に設置された構成であるから、ハンド部の上部にバーコードリーダを設置した従来の構成に比較し、ハンド部6の上部側の動作範囲を拡大でき、その分だけセルを増設することができる等、ライブラリ装置60のカートリッジ4の収容数の増大を図ることができ、また、同一の収容数であれば、ライブラリ装置60を小型化できることになる。
【0082】
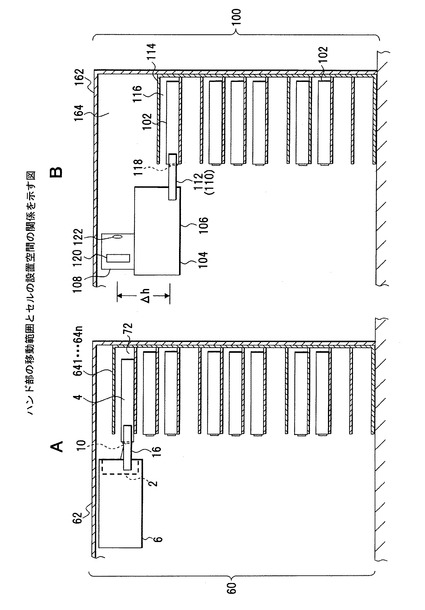
このライブラリ装置60において、ハンド部6の移動範囲とセル72との関係は、ハンド部6にバーコード読取り装置2が内蔵されたことにより、図14のAに示すように、筐体部62の天井面まで移動させることができる。図14のBに示すように、従来のライブラリ装置100ではバーコードリーダ108のバーコード検出位置とグリッパ110、112の位置との間に高さΔhが存在し、図14のAに示すハンド部6ではこのような高さΔhは存在しないので、ハンド部6では、移動範囲が拡大される一方、筐体部62内のセル72の設置数が増加する。最上段のセル116のカートリッジ102を着脱させるためには、バーコードリーダ108の移動に空間164を確保しなければならない従来のライブラリ装置100では、その空間164が無駄な空間となり、筐体部162の小型化を妨げることになる。従って、本発明に係るライブラリ装置60では、セル72の設置段数を同一とすれば、筐体部62の高さを縮小でき、ライブラリ装置60の小型化を図ることができる。
【0083】
〔他の実施の形態〕
【0084】
上記実施の形態では、被搬送物としてカートリッジ4を例示したが、バーコードラベル10が付された被搬送物であればどのようなものでもよく、本発明は、カートリッジ4に限定されるものではない。
【0085】
次に、以上述べた本発明の上記実施の形態から抽出される技術的思想を請求項の記載形式に準じて付記として列挙する。本発明に係る技術的思想は上位概念から下位概念まで、様々なレベルやバリエーションにより把握できるものであり、以下の付記に本発明が限定されるものではない。
【0086】
(付記1) 被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取ることを特徴とするバーコード読取り装置。
【0087】
(付記2) 付記1のバーコード読取り装置において、
前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするバーコード読取り装置。
【0088】
(付記3) 付記1のバーコード読取り装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするバーコード読取り装置。
【0089】
(付記4) 付記1のバーコード読取り装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【0090】
(付記5) 付記1のバーコード読取り装置において、
前記ハンド部にネジ軸を回転可能に設置し、このネジ軸をモータによって回転させることにより、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【0091】
(付記6) 付記1のバーコード読取り装置において、
前記ハンド部が前記被搬送物を把持した際に、前記バーコード読取り部の光照射部を動作させ、前記バーコードからの反射光を受光する構成としたことを特徴とするバーコード読取り装置。
【0092】
(付記7) 被搬送物をハンド部により掴む処理と、
前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理と、
を含むことを特徴とするバーコード読取り方法。
【0093】
(付記8) 付記7のバーコード読取り方法において、
前記バーコードに対して照射する光を走査する処理と、
前記バーコードからの反射光を前記光の走査に対応して検出する処理と、
を含むことを特徴とするバーコード読取り方法。
【0094】
(付記9) 付記7のバーコード読取り方法において、
前記被搬送物がバーコードラベルが付された磁気テープカートリッジであることを特徴とするバーコード読取り方法。
【0095】
(付記10) コンピュータによって実行されるバーコード読取りプログラムであって、
ハンド部に被搬送物を掴む指示情報を出力するステップと、
前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップと、
を含むことを特徴とするバーコード読取りプログラム。
【0096】
(付記11) カートリッジを保管するライブラリ装置であって、
前記カートリッジを搬送する搬送部と、
前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部と、
を備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取ることを特徴とするライブラリ装置。
【0097】
(付記12) 付記11のライブラリ装置において、
前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするライブラリ装置。
【0098】
(付記13) 付記11のライブラリ装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするライブラリ装置。
【0099】
(付記14) 付記11のライブラリ装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするライブラリ装置。
【0100】
(付記15) 付記11のライブラリ装置において、
前記ハンド部にネジ軸を回転可能に設置し、このネジ軸をモータによって回転させることにより、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするライブラリ装置。
【0101】
(付記16) 付記11のライブラリ装置において、
前記ハンド部が前記カートリッジを把持した際に、前記バーコード読取り部の光照射部を動作させ、前記バーコードからの反射光を受光する構成としたことを特徴とするライブラリ装置。
【0102】
以上説明したように、本発明の最も好ましい実施の形態等について説明したが、本発明は、上記記載に限定されるものではなく、特許請求の範囲に記載され、又は明細書に開示された発明の要旨に基づき、当業者において様々な変形や変更が可能であることは勿論であり、斯かる変形や変更が、本発明の範囲に含まれることは言うまでもない。
【産業上の利用可能性】
【0103】
本発明によれば、磁気テープカートリッジ等の被搬送物に付されたバーコードラベルを読み取るバーコード読取り装置に関し、被搬送物を搬送のために把持した状態、把持する体制に入った状態でバーコードを読み取ることができ、バーコード読取りや搬送の簡略化、被搬送物の移動範囲の拡大や、ライブラリ装置の小型化等を図ることができ、有用である。
【図面の簡単な説明】
【0104】
【図1】第1の実施の形態に係るバーコード読取り装置を示す図である。
【図2】バーコードラベルが付されたカートリッジを示す図である。
【図3】バーコードの読取り動作を示す図である。
【図4】第2の実施の形態に係るバーコード読取り装置を示す図である。
【図5】第3の実施の形態に係るライブラリ装置を示す図である。
【図6】ライブラリ装置におけるバーコード読取り装置を示す図である。
【図7】ハンド部、バーコード読取り装置及びカートリッジの関係を示す図である。
【図8】コントローラの一例を示すブロック図である。
【図9】ライブラリ装置の電源投入動作の処理手順を示すフローチャートである。
【図10】ライブラリ装置のカートリッジの搬送等の処理手順を示すフローチャートである。
【図11】ドライブ装置の処理手順を示すフローチャートである。
【図12】バーコードラベルの読取りの処理手順を示すフローチャートである。
【図13】セル内のカートリッジ搬送及びバーコードラベルの読取り動作を示す図である。
【図14】ハンド部の移動範囲とセルの設置空間の関係を示す図である。
【図15】従来のライブラリ装置におけるカートリッジの搬送及びバーコードラベルの読取り動作を示す図である。
【符号の説明】
【0105】
2 バーコード読取り装置
4 カートリッジ
6 ハンド部
8 ハンドフレーム部
10 バーコードラベル
12 バーコード
20 バーコード読取り部
22 発光素子
24 受光素子
60 ライブラリ装置
66 搬送ロボット
68 コントローラ
Li 光ビーム
Lr 反射光
【技術分野】
【0001】
本発明は、磁気テープカードリッジ(以下単に「カートリッジ」と称する)等に付されたバーコードラベルを読み取るバーコード読取り装置に関し、特に、バーコードラベルからの反射光によりバーコードを読み取るバーコード読取り装置、バーコード読取り方法、バーコード読取りプログラム及びライブラリ装置に関する。
【背景技術】
【0002】
各種データの書込み又は読出しに用いられる磁気テープを格納したカートリッジには、ボリューム識別子としてバーコードラベルが使用されている。このカートリッジをセルに収納して保管するライブラリ装置には、磁気テープに対するデータの読取り/書き出しをする磁気テープドライブ装置や、セルと磁気テープドライブ装置との間でカートリッジを搬送するロボット機構部が設置されているとともに、ロボット機構部や磁気テープドライブ装置等の機能部を制御するコントローラが設置されており、ロボット機構部にはカートリッジからバーコードラベルを読み取るバーコードリーダが設置されている。バーコードリーダに読み取られたボリューム情報はカートリッジの特定等に用いられる。バーコードリーダには、ポリゴンミラーやレーザ光源等を用いるレーザタイプや、レンズとCCD(Charge Coupled Device )素子を組み合せたCCDタイプが知られている。
【0003】
このようなバーコード読取りに関し、特許文献1には、カード型電子機器の筐体に発光素子と受光素子とを備え、発光素子の光をバーコードに当て、その反射光を受光素子で受光してバーコードを読み取ることが開示されている。また、特許文献2には、ライブラリ装置において、セル内にある記録媒体のバーコードラベルからの反射光により、バーコードを読み取ることが開示されている。
【特許文献1】特開平3−171248号公報(第1頁右欄第12行以下等)
【特許文献2】特開平9−91930号公報(段落番号0021、図3等)
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、ポリゴンミラー、レンズ、CCD等を用いたバーコードリーダでは製造コストが高くなり、レーザ光をバーコードラベル全体に照射することはレーザ光源とバーコードラベルとの距離が長くなり、レンズの半画角等の特性から、バーコードリーダを小型化することができない。このようなバーコードリーダでは、カートリッジを搬送するロボット機構部に設置することができないし、ライブラリ装置内にバーコードリーダの占める割合が大きくなると、ロボット機構部の移動範囲やセルの設置が妨げられる。小型のライブラリ装置では、カートリッジの収納効率が低下することにもなる。
【0005】
例えば、図15のA及びBに示すように、このライブラリ装置100では、カートリッジ102の搬送ロボット104のハンド部106にあるバーコードリーダ108が設置されている。ハンド部106の側部には、カートリッジ102を把持するためのグリッパ110、112が設けられている。カラム114は、カートリッジ102を収納する複数のセル116の集合体である。搬送ロボット104は、カラム114の上下方向にハンド部106を移動させ、読取り対象であるカートリッジ102のバーコードラベル118にバーコードリーダ108を位置付け、バーコードラベル118からバーコードの読取りが行われる。
【0006】
この場合、バーコードリーダ108は、CCD120、レンズ122等を備えた構成であって、ハンド部106の上面部に比較的大きな体積を有するものである。
【0007】
このようなバーコードリーダ108では、その読取り位置と、ハンド部106のグリッパ110、112の把持位置とが異なっており、図15のBの例では、高さΔhだけの差が生じている。このようなバーコードリーダ108を用いた場合には、バーコード読取りによるボリューム登録の後、ハンド部106の位置を把持すべきカートリッジ102側に変更し、読取りとは別のカートリッジ把持のための工程が必要となる。即ち、ライブラリ装置100にカートリッジ102を投入した際、バーコードラベル118の読取り工程と、カートリッジ102のセル116への搬送工程の2工程を必要としている。このため、ライブラリ装置100に対するカートリッジ102の投入処理に時間を要するという課題があった。
【0008】
斯かる課題について、特許文献1、2には、その開示や示唆はなく、それを解決する構成や着想はない。
【0009】
そこで、本発明の第1の目的は、カートリッジ等の被搬送物からのバーコードの読取りに関し、把持された被搬送物に対するバーコード読取りを可能とすることにある。
【0010】
また、本発明の第2の目的は、カートリッジ等の搬送物に付されたバーコードの読取りに関し、被搬送物を把持するとともに、バーコードの読取り機能を持つハンド部の小型化を図ることにある。
【0011】
また、本発明の第3の目的は、カートリッジ等の搬送物に付されたバーコードの読取りに関し、被搬送物を把持するとともに、バーコードの読取り機能を持つハンド部の移動範囲を拡大することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するため、本発明は、磁気テープを格納したカートリッジ等の被搬送物に付されたバーコードラベルのバーコード読取り部を前記被搬送物を掴むハンド部の被搬送物の対向面部に備えるとともに、バーコード読取り部にバーコードラベルに光を照射する光源と、バーコードラベルからの反射光を受光する受光部とを備え、バーコードラベルを光の走査により検出するので、被搬送物の把持とバーコードラベルの読取りとを同時的に行える構成としたことにより、上記目的を達成している。
【0013】
そこで、本発明の第1の側面は、バーコード読取り装置であって、被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取る構成である。斯かる構成とすれば、ハンド部に掴まれた被搬送物からバーコードの読取りが行え、上記目的が達成される。
【0014】
このバーコード読取り装置において、好ましくは、前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としてもよく、斯かる構成によっても、上記目的が達成される。
【0015】
上記バーコード読取り装置において、前記バーコード読取り部は、好ましくは、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備える構成としてもよく、斯かる構成によっても、上記目的が達成される。
【0016】
上記バーコード読取り装置において、好ましくは、前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備える構成としてもよい。斯かる構成によれば、バーコードと平行にバーコードを走査することができ、ハンド部に掴まれた被搬送物からバーコードの読取りを行える。
【0017】
また、本発明の第2の側面は、バーコード読み取り方法であって、被搬送物をハンド部により掴む処理と、前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理とを含む構成である。斯かる構成によっても、上記目的が達成される。
【0018】
このバーコード読取り方法において、好ましくは、前記バーコードに対して照射する光を走査する処理と、前記バーコードからの反射光を前記光の走査に対応して検出する処理とを含む構成としてもよい。
【0019】
また、本発明の第3の側面は、コンピュータによって実行されるバーコード読取りプログラムであって、ハンド部に被搬送物を掴む指示情報を出力するステップと、前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップとを含む構成である。
【0020】
また、本発明の第4の側面は、カートリッジを保管するライブラリ装置であって、前記カートリッジを搬送する搬送部と、前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部とを備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取る構成である。
【0021】
斯かる構成によれば、ハンド部に把持されたカートリッジからバーコードを読み取ることができ、しかも、ハンド部の筐体内にバーコード読取り部が内蔵されているので、ハンド部が小型化され、その移動範囲が拡大される。
【0022】
このライブラリ装置において、好ましくは、前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としてもよく、斯かる構成によっても、同様に上記目的が達成される。
【0023】
上記ライブラリ装置において、前記バーコード読取り部は、好ましくは、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備える構成としてもよい。斯かる構成によっても、同様に上記目的が達成される。
【発明の効果】
【0024】
本発明によれば、次の効果が得られる。
【0025】
(1) 被搬送物を掴むハンド部に、被搬送物のバーコードを読み取るバーコード読取り部を内蔵させたので、バーコード読取り装置の小型化を図ることができ、又は被搬送物の把持とバーコード読取りとを同時的に行うことができる。
【0026】
(2) ライブラリ装置において、磁気テープを内蔵したカートリッジを掴むハンド部に、カートリッジのバーコードを読み取るバーコード読取り部を内蔵させたので、カートリッジの把持とバーコード読取りとを同時的に行うことができる。
【0027】
(3) ライブラリ装置において、磁気テープを内蔵したカートリッジを掴むハンド部にカートリッジのバーコードを読み取るバーコード読取り部を内蔵させたので、ハンド部の移動範囲を拡大することができ、カートリッジの収納空間を拡大でき、又は同一の収納空間であれば、ライブラリ装置の小型化を図ることができる。
【発明を実施するための最良の形態】
【0028】
〔第1の実施の形態〕
【0029】
本発明の第1の実施の形態について、図1、図2及び図3を参照して説明する。図1は、バーコード読取り装置の構成例を示す図、図2は、バーコードラベルが付されたカードリッジ(磁気テープカートリッジ)を示す図、図3は、バーコードの読取り動作を示す図である。
【0030】
このバーコード読取り装置2は、被搬送物としてのカートリッジ4を把持するハンド部6のハンドフレーム部8に搭載されており、搬送途上のカートリッジ4のバーコードラベル10からバーコード12(図2)を読み取る構成である。ハンドフレーム部8には、左右に進退して開閉されるグリッパ14、16が取り付けられており、これらグリッパ14、16にカートリッジ4が把持される。このカートリッジ4のバーコードラベル10からバーコード12を読み取るため、ハンドフレーム部8にはレール部18が備えられ、このレール部18を以てバーコードラベル10と平行に移動させるバーコード読取り部20が設置されている。バーコード読取り部20には、バーコードラベル10に光ビームLiを照射する点光源としての発光素子22と、バーコードラベル10からの反射光Lrを受光する受光素子24が設置されている。発光素子22は例えば、発光ダイオードで構成され、受光素子24は例えば、受光トランジスタで構成されている。これら発光素子22及び受光素子24は筐体部26に搭載され、発光素子22、受光素子24及び筐体部26を以てバーコード読取りモジュールが構成されている。
【0031】
バーコード読取り部20は走査機構部28によってバーコードラベル10と平行に走査される。入力端子30に駆動電圧Viを印加すると、発光素子22が点光源として発光し、光ビームLiがバーコードラベル10に照射される。バーコードラベル10からの反射光Lrは受光素子24に受光され、受光素子24から検出信号Voが得られ、この検出信号Voが出力端子32から取り出すことができる。この検出信号Voのレベル変化からバーコード12を読み取ることができる。
【0032】
バーコード12は、図2及び図3に示すように、白地32に一定の長さを持つバー34の太さを異ならせて配列させ、各バー34の間に異なる幅の間隔36が設定されることにより、ボリューム識別子等を表すバーコードデータが書き込まれたものである。このようなバーコード12に光ビームLiを照射し、走査機構部28によりバーコード読取り部20をバーコード12に沿って走査させると、バーコード12のバー34を表すレベルの異なる出力信号Voが得られる。
【0033】
この場合、図3のAに示すバーコードラベル10では、その長さW1に対応し、バーコード読取り部20を走査して光ビームLiを照射すると、受光素子24には図3のBに示すように、バーコード12のバー34とその間隔36等に対応し、パルス状の検出信号Voが得られる。このバーコードラベル10では、その長さW1の間に、クワイエットゾーンQZ、スタートビットSB、キャラクタデータCD、ストップビットSTB及びクワイエットゾーンQZが設定されている。そこで、受光信号からバーコードデータとしてキャラクタデータCDを読み取ることができる。
【0034】
この場合、走査機構部28によるバーコード読取り部20の走査は、バーコードラベル10の長さW1、W2に応じて行えばよく、バーコードラベル10が短い長さW2である場合には、図3のCに示すように、その長さに応じた受光信号が得られる。
【0035】
このようなバーコード読取り装置2及びその読取り方法によれば、ハンド部6に把持されるカートリッジ4のバーコードラベル10からバーコード12を簡易な機構により読み取ることができ、しかも、ハンド部6で搬送されるカートリッジ4のボリューム識別子を搬送途上で容易に読み取ることができる。
【0036】
〔第2の実施の形態〕
【0037】
次に、本発明の第2の実施の形態について、図4を参照して説明する。図4は、バーコード読取り装置の構成例を示す図である。図4において、図1と同一部分には同一符号を付してある。
【0038】
この実施の形態では、走査機構部28が、バーコード読取り部20をバーコードラベル10に平行に走査するため、スライダ40、ネジ軸42、ギヤボックス44、駆動用モータ46等で構成されている。即ち、バーコード読取り部20が搭載されたスライダ40は、ストリングスクリューやボールネジと称されるネジ軸42に取り付けられ、ネジ軸42の回転により左右に移動する。ネジ軸42にはギヤボックス44を介して駆動用モータ46が連結されている。ギヤボックス44には回転を検出する回転検出手段としてエンコーダ48が設置される。
【0039】
駆動用モータ46に対し、駆動入力端子50、52からモータ駆動電圧Vdを印加すると、駆動用モータ46は定速度で回転し、その回転がギヤボックス44を介してネジ軸42に伝達し、ネジ軸42を回転させる。このネジ軸42の定速度により、スライダ40が移動し、バーコード読取り部20がバーコードラベル10に平行に走査される。ネジ軸42の回転は、エンコーダ48によって検出され、出力端子54からその回転検出出力Veが得られる。
【0040】
また、発光素子22及び受光素子24の一方の端子には共通に電源電圧Vccが加えられており、発光素子22の一方の端子にはスイッチング制御入力端子56、受光素子24の一方の端子には出力端子58が設けられている。そこで、スイッチング制御入力端子56にスイッチング制御信号Vsが加えられると、発光素子22が発光し、光ビームLiがバーコードラベル10のバーコード12に照射される。この光ビームLiの走査により、受光素子24には反射光Lrが検出され、出力信号Voが得られる。この出力信号Voは出力端子58を通して取り出される。
【0041】
従って、斯かる実施の形態によっても、バーコード読取り部20からバーコード12を読み取ることができ、第1の実施の形態と同様に、搬送中のカートリッジ4からボリューム識別子を読み取ることができる。
【0042】
〔第3の実施の形態〕
【0043】
次に、本発明の第3の実施の形態について、図5、図6、図7及び図8を参照して説明する。図5は、ライブラリ装置の構成を示す図、図6は、ライブラリ装置におけるバーコード読取り装置の構成を示す図、図7は、ハンド部、バーコード読取り装置及びカートリッジの関係を示す図、図8は、コントローラの一例を示すブロック図である。図5、図6及び図7において、図1又は図4と同一部分には同一符号を付してある。
【0044】
このライブラリ装置60には、図5に示すように、筐体部62と、複数のカラム641、642・・・64nと、搬送ロボット66と、コントローラ68と、複数のドライブ装置70とが設置されている。
【0045】
各カラム641、642・・・64nは、セル72の集合体であり、各セル72にはカートリッジ4が保管される。カートリッジ4は、既述した通り、磁気テープカートリッジであり、他の記録媒体であってもよい。
【0046】
搬送ロボット66は、各セル72から任意のドライブ装置70、各ドライブ装置70から任意のセル72にカートリッジ4を搬送するための搬送手段である。そこで、この搬送ロボット66は、カートリッジ4を把持するハンド機構を備えるハンド部6を備えるとともに、ハンド部6を任意のセル72やドライブ装置70に移送するためのロボット機構部としてX軸、Y軸又はZ軸方向の移送機構74を備えている。
【0047】
そして、ハンド部6には、バーコード読取り装置2が設置されており、このバーコード読取り装置2は、既述の通り、ハンド部6に把持されるカートリッジ4のバーコードラベル10を走査し、バーコード12を読み取る。
【0048】
コントローラ68は、コンピュータによって構成され、搬送ロボット66、ハンド部6、バーコード読取り装置2及びドライブ装置70等を制御する。このコントローラ68には、CPU(Central Processing Unit )76、メモリ部78、インタフェース(I/F)カード80等のハードウェアの他、オペレーティングシステム(OS)82、ファームウェア(FIRM)84等のソフトウェアが搭載されている。I/Fカード80は、コントローラ68の入出力部を構成し、このI/Fカード80を通して外部のホストコンピュータ86(図8)に接続されている。
【0049】
ドライブ装置70は、コントローラ68によって制御されるとともに、ホストコンピュータ86(図8)に接続され、コントローラ68又はホストコンピュータ86からのデータをカートリッジ4の磁気テープに対して書き込み、磁気テープから読み出したデータをコントローラ68やホストコンピュータ86に出力する。図5において、実線はコントローラ68との接続、破線はホストコンピュータ86との接続を示している。
【0050】
バーコード読取り装置2は、図5に示すように、ハンド部6のハンドフレーム部8の前面側に搭載されており、既述の通り、バーコード読取り部20、走査機構部28として、駆動用モータ46、ギヤボックス44、スライダ40及びネジ軸42等で構成されている。これらの構成は、図4を参照して説明したので、その説明を省略する。
【0051】
また、図6に示すように、駆動用モータ46に接続された駆動部88はコントローラ68によって制御され、駆動電圧Vdを駆動用モータ46に加える。駆動用モータ46に連結されたエンコーダ48の回転検出出力Veは、回転情報としてコントローラ68に加えられている。また、発光素子22には、コントローラ68からスイッチング制御信号Vsが加えられ、受光素子24の出力信号Voがコントローラ68に加えられている。
【0052】
そして、バーコード読取り装置2は、図7に示すように、ハンド部6のカートリッジ4の対向面部に設置され、グリッパ14、16によるカートリッジ4の把持状態、又は把持動作前にハンド部6が把持体制に入った状態でバーコードラベル10からバーコード12を読み取ることができる。
【0053】
また、コントローラ68は、図8に示すように、CPU76、メモリ部78、I/Oレジスタ92、ホストインタフェース94等を備え、これらはバス96によって接続されている。メモリ部78には、ROM(Read-Only Memory)98及びRAM(Random-Access Memory)99等が備えられ、ROM98にはOS82、FIRM84の他、各種のプログラムが格納されている。FIRM84にはライブラリコントロールプロセス841、ロボットコントロールプロセス842、ドライブコントロールプロセス843、バーコード読取りコントロールプロセス844、ホストインタフェースプロセス845、アイドルコントロールプロセス846、その他のプログラム847が含まれている。
【0054】
そして、コントローラ68は、ハンド部6をセル72のカートリッジ4に水平に移動させて位置決めし、バーコード読取り装置2のバーコード読取り部20をバーコードラベル10に対し、水平に走査し、バーコード12の読取りを行う。
【0055】
即ち、ハンド部6がカートリッジ4を把持した状態で、バーコード読取り装置2のバーコード読取り部20をバーコードラベル10に対して平行かつ水平に走査することができる。この走査により光ビームLiを照射し、その反射光Lrを検出でき、バーコード12の黒のバー34と白の間隔36を検出し、判定することができる。
【0056】
しかも、このバーコード読取り装置2では、バーコードラベル10に対してバーコード読取り部20を近接させることができるので、外乱光の影響を低減でき、その際、バーコードラベル10に印刷されたバー34の幅を的確に検出でき、定速度で走査させることができ、バーコード12の読取り率の向上を図ることができる。
【0057】
そして、バーコード読取り装置2の制御系は、ライブラリ装置60のコントローラ68に内蔵することができ、バーコード読取りの専用回路は不要であり、駆動部88(図6)もコントローラ68に内蔵させることができる。
【0058】
次に、ライブラリ装置60、バーコード読取り装置2の動作を説明する。
【0059】
ライブラリ装置60の電源投入時の動作について、図9を参照して説明する。図9は、ライブラリ装置の電源投入時の動作を示すフローチャートである。
【0060】
電源を投入すると、OS82が起動し(ステップS1)、ハードウェア診断が開始され(ステップS2)、診断の結果、正常か否かの判定が行われ(ステップS3)、装置が異常であれば(ステップS3のNO)、この動作を終了する。また、正常であれば、設定情報の読込みが行われる(ステップS4)。この場合、設定情報は、ライブラリ装置60のセル数、搬送ロボット66の稼動範囲、ボリューム登録情報、ドライブ装置70の台数等である。
【0061】
このような設定情報の読込みの完了後、RPS(Relative Positioning System )処理により、搬送ロボット66の位置情報の取得が開始される(ステップS5)。RPS処理は、搬送ロボット66とセル72の相対位置情報の取得処理であって、機械的、物理的なばらつきを吸収するための処理である。
【0062】
この処理の後、位置情報の取得が行われたか否かの判断をし(ステップS6)、位置情報が取得できれば(ステップS6のYES)、セル72に収納されたカートリッジ4のボリューム登録を行う(ステップS7)。このボリューム登録はインベントリ処理によって実行され、このインベントリ処理は、カートリッジ4のバーコードラベル10からバーコード12を読み取る処理である。
【0063】
このインベントリ処理の後、ボリューム情報の取得ができたか否かが判定され(ステップS8)、ボリューム情報が取得できれば(ステップS8のYES)、アイドルプロセスに移行し(ステップS9)、この電源投入処理を終了する。
【0064】
また、ステップS6において、搬送ロボット66の位置情報の取得ができなければ(ステップS6のNO)、搬送ロボット66の位置情報の取得のためのリトライ動作を実行し(ステップS10)、そのリトライ回数が予め設定された所定回数nに到達したか否かを監視し(ステップS11)、リトライ回数は所定回数nに到達するまでリトライ動作を繰り返し、搬送ロボット66の位置情報の取得を試みる。リトライ回数が所定回数nを超えれば(ステップS11のYES)、装置異常と判定し、この電源投入処理を終了する。
【0065】
また、ステップS8において、ボリューム情報の取得ができなければ(ステップS8のNO)、ボリューム情報の取得のためのリトライ動作を実行し(ステップS12)、そのリトライ回数が予め設定された所定回数nに到達したか否かを監視し(ステップS13)、リトライ回数は所定回数nに到達するまでリトライ動作を繰り返し、カートリッジ4のボリューム情報の取得を試みる。リトライ回数が所定回数nを超えれば(ステップS13のYES)、装置異常と判定し、この電源投入処理を終了する。
【0066】
次に、カートリッジの搬送動作について、図10及び図11を参照して説明する。図10は、ライブラリ装置のカートリッジの搬送動作を示すフローチャート、図11は、ドライブ装置の処理手順を示すフローチャートである。
【0067】
ホストコンピュータ86からの搬送指示により(ステップS21)、コントローラ68は、メモリ部78のテーブルを検索し、搬送対象のカートリッジ4を特定し(ステップS22)、搬送ロボット66を移動させ、任意のセル72に位置付ける(ステップS23)。セル72に対する搬送ロボット66の位置付けが完了したか否かを判定し(ステップS24)、位置付けが完了するまで位置付け動作を継続し、位置付けが完了すれば(ステップS24のYES)、搬送ロボット66はカートリッジ4を把持する(ステップS25)。このカートリッジ4に対し、バーコード12の読取り処理(ステップS26)を実行する。この読取り処理は、図12に示すフローチャートによって実行される。この処理により、カートリッジ12から読み取ったボリューム情報をテーブルの情報と比較し(ステップS27)、一致すれば、任意のドライブ装置70又はセル72に搬送を開始し(ステップS28)、その搬送を監視(ステップS29)する。その搬送が完了すれば(ステップS29のYES)、搬送先がセル72であるか否かを判定し(ステップS30)、搬送先がセル72であれば(ステップS30のYES)、コントローラ68のメモリ部78のテーブルを更新し、ホストコンピュータ86に通知し(ステップS31)、アイドルプロセスに移行し(ステップS32)、ホストコンピュータ86からの搬送指示(ステップS21)にリターンする。
【0068】
ステップS27において、テーブルの比較により、テーブルにボリューム情報がなければ、テーブル異常と判断し、処理を中断し(ステップS33)、この処理を終了させる。
【0069】
また、ステップS30において、搬送先がセル72でなければ(ステップS30のNO)、図11に示すドライブ装置の処理(ステップS34)を実行する。
【0070】
ドライブ装置の処理は、図11に示すように、ドライブ装置70のキャリアをダウンさせ(ステップS41)、ドライブ装置70が使用可能になったことをホストコンピュータ86に通知し(ステップS42)、ホストコンピュータ86からカートリッジ4の磁気テープの読み書きの指示を受け、その処理を実行する(ステップS43)。この処理は監視され(ステップS44)、処理が完了すれば(ステップS44のYES)、ドライブ装置70からホストコンピュータ86に対して切離しを要求し(ステップS45)、ドライブ装置70のキャリアをアップさせ(ステップS46)、任意のセル72に搬送し(ステップS47)、ステップS34(図10)にリターンする。
【0071】
次に、バーコードの読取り処理について、図12及び図13を参照して説明する。図12は、バーコードの読取りの処理手順を示すフローチャート、図13は、バーコードの読取り動作を示す図である。
【0072】
バーコードの読取り処理では、搬送ロボット66を動作させ、ハンド部6を任意のセル72に位置付ける動作を実行し(ステップS51)、この位置付け動作を監視し(ステップS52)、ハンド部6が任意のセル72に対する位置付けが完了すれば(ステップS52のYES)、グリッパ14、16によってカートリッジ4を把持し(ステップS53)、発光素子22をスイッチング制御信号の入力により発光させ(ステップS54)、カートリッジ4の把持による振動の収束する一定時間T例えば、100〔ms〕だけ待機し(ステップS55)、この待機時間の経過の後、駆動用モータ46を定速度で駆動させ(ステップS56)、バーコードラベル10に光ビームLiを照射する。
【0073】
この光照射により、バーコード12から反射光Lrが得られるので、受光素子24の出力信号の応答を監視し(ステップS57)、受光素子24の出力信号を検出する。出力信号の応答があった場合(ステップS57のYES)、駆動用モータ46を停止させ(ステップS58)、受光素子24の出力信号をメモリ部78に格納し(ステップS59)、クワイエットゾーンの有無を監視し(ステップS60)、クワイエットゾーンがあった場合には(ステップS60のYES)、スタート/ストップビットの有無を監視し(ステップS61)、スタート/ストップビットがあった場合(ステップS61のYES)には、メモリ部78からデータを取得し、デコードを開始する(ステップS62)。そのデコード結果をメモリ部78に格納する(ステップS63)。
【0074】
読取り対象の有無を監視し(ステップS64)、読取り対象がなければ(ステップS64のNO)、読取り完了処理(ステップS65)を実行し、バーコードラベル10の読取りを終了する。この場合、読取り対象があれば(ステップS64のYES)、ステップS51にリターンする。
【0075】
また、ステップS57において、受光素子24の出力信号が得られないならば(ステップS57のNO)、何らかの異常が予想されるので、駆動用モータ46の駆動について判定し(ステップS66)、駆動用モータ46が回転していないならば(ステップS66のNO)、モータ異常と判定し(ステップS67)、この処理を終了する。
【0076】
また、駆動用モータ46が駆動しているならば(ステップS66のYES)、受光素子24の診断を行い(ステップS68)、受光素子24に異常があれば(ステップS68のNO)、異常と判定し(ステップS69)、この処理を終了する。
【0077】
また、受光素子24が正常であれば(ステップS68のYES)、発光素子22の診断を行い(ステップS70)、発光素子22に異常があれば(ステップS70のNO)、異常と判定し(ステップS71)、この処理を終了する。発光素子22が正常であれば(ステップS70のYES)、ステップS58に移行する。
【0078】
また、ステップ60において、クワイエットゾーンがなければ(ステップ60のNO)、移動速度を段階的に変更し、その変更回数が所定回数nを超えたか否かを監視し(ステップ72)、所定回数n以下であるならば(ステップ72のNO)、移動速度を通常時により下げ(ステップ73)、ステップ57に移行する。その変更回数が所定回数nを超えてもバーコード12を検出できないならば(ステップ72のYES)、そのバーコードラベル10は異常と認識し(ステップ74)、この処理を終了する。
【0079】
そして、図13のAに示すように、任意のセル72にハンド部6が位置付けされると、バーコード読取り装置2のバーコード読取り部20の発光素子22からカートリッジ4のバーコードラベル10に光ビームLiが照射され、その反射光Lrが受光素子24に検出される。このようなバーコードラベル10の検出処理と、カートリッジ4の搬送処理とは、図13のBに示すように、単一のプロセスで行うことができる。
【0080】
以上説明したように、バーコード読取り装置2がハンド部6の前面部に設置されているので、カートリッジ4のバーコードラベル10をハンド部6の把持操作の途上で読み取ることができる等、読取り動作と搬送動作とを一体化することができる。即ち、ライブラリ装置60の外からカートリッジ4が投入された際に、セル72からカートリッジ4を把持し、バーコードラベル10の読込み処理と任意のセル72への移動処理を一プロセスで行え、処理の単純化とともに、高速化を図ることができる。
【0081】
また、斯かる構成は、バーコード読取り装置2がハンド部6の高さ内に設置された構成であるから、ハンド部の上部にバーコードリーダを設置した従来の構成に比較し、ハンド部6の上部側の動作範囲を拡大でき、その分だけセルを増設することができる等、ライブラリ装置60のカートリッジ4の収容数の増大を図ることができ、また、同一の収容数であれば、ライブラリ装置60を小型化できることになる。
【0082】
このライブラリ装置60において、ハンド部6の移動範囲とセル72との関係は、ハンド部6にバーコード読取り装置2が内蔵されたことにより、図14のAに示すように、筐体部62の天井面まで移動させることができる。図14のBに示すように、従来のライブラリ装置100ではバーコードリーダ108のバーコード検出位置とグリッパ110、112の位置との間に高さΔhが存在し、図14のAに示すハンド部6ではこのような高さΔhは存在しないので、ハンド部6では、移動範囲が拡大される一方、筐体部62内のセル72の設置数が増加する。最上段のセル116のカートリッジ102を着脱させるためには、バーコードリーダ108の移動に空間164を確保しなければならない従来のライブラリ装置100では、その空間164が無駄な空間となり、筐体部162の小型化を妨げることになる。従って、本発明に係るライブラリ装置60では、セル72の設置段数を同一とすれば、筐体部62の高さを縮小でき、ライブラリ装置60の小型化を図ることができる。
【0083】
〔他の実施の形態〕
【0084】
上記実施の形態では、被搬送物としてカートリッジ4を例示したが、バーコードラベル10が付された被搬送物であればどのようなものでもよく、本発明は、カートリッジ4に限定されるものではない。
【0085】
次に、以上述べた本発明の上記実施の形態から抽出される技術的思想を請求項の記載形式に準じて付記として列挙する。本発明に係る技術的思想は上位概念から下位概念まで、様々なレベルやバリエーションにより把握できるものであり、以下の付記に本発明が限定されるものではない。
【0086】
(付記1) 被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取ることを特徴とするバーコード読取り装置。
【0087】
(付記2) 付記1のバーコード読取り装置において、
前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするバーコード読取り装置。
【0088】
(付記3) 付記1のバーコード読取り装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするバーコード読取り装置。
【0089】
(付記4) 付記1のバーコード読取り装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【0090】
(付記5) 付記1のバーコード読取り装置において、
前記ハンド部にネジ軸を回転可能に設置し、このネジ軸をモータによって回転させることにより、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【0091】
(付記6) 付記1のバーコード読取り装置において、
前記ハンド部が前記被搬送物を把持した際に、前記バーコード読取り部の光照射部を動作させ、前記バーコードからの反射光を受光する構成としたことを特徴とするバーコード読取り装置。
【0092】
(付記7) 被搬送物をハンド部により掴む処理と、
前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理と、
を含むことを特徴とするバーコード読取り方法。
【0093】
(付記8) 付記7のバーコード読取り方法において、
前記バーコードに対して照射する光を走査する処理と、
前記バーコードからの反射光を前記光の走査に対応して検出する処理と、
を含むことを特徴とするバーコード読取り方法。
【0094】
(付記9) 付記7のバーコード読取り方法において、
前記被搬送物がバーコードラベルが付された磁気テープカートリッジであることを特徴とするバーコード読取り方法。
【0095】
(付記10) コンピュータによって実行されるバーコード読取りプログラムであって、
ハンド部に被搬送物を掴む指示情報を出力するステップと、
前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップと、
を含むことを特徴とするバーコード読取りプログラム。
【0096】
(付記11) カートリッジを保管するライブラリ装置であって、
前記カートリッジを搬送する搬送部と、
前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部と、
を備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取ることを特徴とするライブラリ装置。
【0097】
(付記12) 付記11のライブラリ装置において、
前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするライブラリ装置。
【0098】
(付記13) 付記11のライブラリ装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするライブラリ装置。
【0099】
(付記14) 付記11のライブラリ装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするライブラリ装置。
【0100】
(付記15) 付記11のライブラリ装置において、
前記ハンド部にネジ軸を回転可能に設置し、このネジ軸をモータによって回転させることにより、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするライブラリ装置。
【0101】
(付記16) 付記11のライブラリ装置において、
前記ハンド部が前記カートリッジを把持した際に、前記バーコード読取り部の光照射部を動作させ、前記バーコードからの反射光を受光する構成としたことを特徴とするライブラリ装置。
【0102】
以上説明したように、本発明の最も好ましい実施の形態等について説明したが、本発明は、上記記載に限定されるものではなく、特許請求の範囲に記載され、又は明細書に開示された発明の要旨に基づき、当業者において様々な変形や変更が可能であることは勿論であり、斯かる変形や変更が、本発明の範囲に含まれることは言うまでもない。
【産業上の利用可能性】
【0103】
本発明によれば、磁気テープカートリッジ等の被搬送物に付されたバーコードラベルを読み取るバーコード読取り装置に関し、被搬送物を搬送のために把持した状態、把持する体制に入った状態でバーコードを読み取ることができ、バーコード読取りや搬送の簡略化、被搬送物の移動範囲の拡大や、ライブラリ装置の小型化等を図ることができ、有用である。
【図面の簡単な説明】
【0104】
【図1】第1の実施の形態に係るバーコード読取り装置を示す図である。
【図2】バーコードラベルが付されたカートリッジを示す図である。
【図3】バーコードの読取り動作を示す図である。
【図4】第2の実施の形態に係るバーコード読取り装置を示す図である。
【図5】第3の実施の形態に係るライブラリ装置を示す図である。
【図6】ライブラリ装置におけるバーコード読取り装置を示す図である。
【図7】ハンド部、バーコード読取り装置及びカートリッジの関係を示す図である。
【図8】コントローラの一例を示すブロック図である。
【図9】ライブラリ装置の電源投入動作の処理手順を示すフローチャートである。
【図10】ライブラリ装置のカートリッジの搬送等の処理手順を示すフローチャートである。
【図11】ドライブ装置の処理手順を示すフローチャートである。
【図12】バーコードラベルの読取りの処理手順を示すフローチャートである。
【図13】セル内のカートリッジ搬送及びバーコードラベルの読取り動作を示す図である。
【図14】ハンド部の移動範囲とセルの設置空間の関係を示す図である。
【図15】従来のライブラリ装置におけるカートリッジの搬送及びバーコードラベルの読取り動作を示す図である。
【符号の説明】
【0105】
2 バーコード読取り装置
4 カートリッジ
6 ハンド部
8 ハンドフレーム部
10 バーコードラベル
12 バーコード
20 バーコード読取り部
22 発光素子
24 受光素子
60 ライブラリ装置
66 搬送ロボット
68 コントローラ
Li 光ビーム
Lr 反射光
【特許請求の範囲】
【請求項1】
被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取ることを特徴とするバーコード読取り装置。
【請求項2】
請求項1のバーコード読取り装置において、
前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするバーコード読取り装置。
【請求項3】
請求項1のバーコード読取り装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするバーコード読取り装置。
【請求項4】
請求項1のバーコード読取り装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【請求項5】
被搬送物をハンド部により掴む処理と、
前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理と、
を含むことを特徴とするバーコード読取り方法。
【請求項6】
請求項5のバーコード読取り方法において、
前記バーコードに対して照射する光を走査する処理と、
前記バーコードからの反射光を前記光の走査に対応して検出する処理と、
を含むことを特徴とするバーコード読取り方法。
【請求項7】
コンピュータによって実行されるバーコード読取りプログラムであって、
ハンド部に被搬送物を掴む指示情報を出力するステップと、
前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップと、
を含むことを特徴とするバーコード読取りプログラム。
【請求項8】
カートリッジを保管するライブラリ装置であって、
前記カートリッジを搬送する搬送部と、
前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部と、
を備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取ることを特徴とするライブラリ装置。
【請求項9】
請求項8のライブラリ装置において、
前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするライブラリ装置。
【請求項10】
請求項8のライブラリ装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするライブラリ装置。
【請求項1】
被搬送物を掴むハンド部の筐体内に前記被搬送物のバーコードを読み取るバーコード読取り部を内蔵し、前記ハンド部に掴まれた前記被搬送物から前記バーコードを読み取ることを特徴とするバーコード読取り装置。
【請求項2】
請求項1のバーコード読取り装置において、
前記ハンド部の前記筐体の前記被搬送物に対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするバーコード読取り装置。
【請求項3】
請求項1のバーコード読取り装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするバーコード読取り装置。
【請求項4】
請求項1のバーコード読取り装置において、
前記ハンド部は、前記バーコード読取り部を前記バーコードに平行に走査する走査機構部を備えることを特徴とするバーコード読取り装置。
【請求項5】
被搬送物をハンド部により掴む処理と、
前記被搬送物に付されているバーコードと平行に走査して前記バーコードに光を照射する処理と、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得する処理と、
を含むことを特徴とするバーコード読取り方法。
【請求項6】
請求項5のバーコード読取り方法において、
前記バーコードに対して照射する光を走査する処理と、
前記バーコードからの反射光を前記光の走査に対応して検出する処理と、
を含むことを特徴とするバーコード読取り方法。
【請求項7】
コンピュータによって実行されるバーコード読取りプログラムであって、
ハンド部に被搬送物を掴む指示情報を出力するステップと、
前記被搬送物に付されているバーコードと平行に光源を走査させ、前記バーコードに光を照射する指示情報を出力するステップと、
前記バーコードから得られる反射光を検出し、前記バーコードの検出情報を取得するステップと、
を含むことを特徴とするバーコード読取りプログラム。
【請求項8】
カートリッジを保管するライブラリ装置であって、
前記カートリッジを搬送する搬送部と、
前記搬送部に設置されて前記カートリッジを掴むハンド部の筐体内に内蔵され、前記カートリッジのバーコードを読み取るバーコード読取り部と、
を備え、前記ハンド部に掴まれた前記カートリッジから前記バーコードを読み取ることを特徴とするライブラリ装置。
【請求項9】
請求項8のライブラリ装置において、
前記ハンド部の前記筐体の前記カートリッジに対向する前面部に、前記バーコード読取り部の光照射部と受光部とを備える構成としたことを特徴とするライブラリ装置。
【請求項10】
請求項8のライブラリ装置において、
前記バーコード読取り部は、点光源と、この点光源から前記バーコードに光を照射し、前記バーコードからの反射光を受光し、前記バーコードを表す出力信号を発生する受光部とを備えることを特徴とするライブラリ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2007−226630(P2007−226630A)
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願番号】特願2006−48419(P2006−48419)
【出願日】平成18年2月24日(2006.2.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願日】平成18年2月24日(2006.2.24)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]