
パイプコンベヤの捩れ状態検出装置
【課題】搬送ベルトの丸められた部分の蛇行角度と潰れの度合を容易にかつ精度よく検出する。
【解決手段】搬送ベルト10の端部に永久磁石2を所定の間隔で設置し、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むようにループコイル31〜38を円周状に配列するとともに、上記ループコイル31〜38の円周方向外側にループコイル41〜48を配列して、上記各ループコイルの出力信号のピーク値を検出した後、上記ループコイル31〜38の上記ピーク値を比較して上記搬送ベルト10の蛇行角度θを演算し、上記θが許容範囲内にある場合には、上記θ方向に位置する内側のループコイルのピーク値PKと外側のループコイルのピーク値pkとの比から、永久磁石2と内側のループコイルとの距離rを演算して、上記パイプ状に丸められた搬送ベルト10の重合位置を特定するようにした。
【解決手段】搬送ベルト10の端部に永久磁石2を所定の間隔で設置し、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むようにループコイル31〜38を円周状に配列するとともに、上記ループコイル31〜38の円周方向外側にループコイル41〜48を配列して、上記各ループコイルの出力信号のピーク値を検出した後、上記ループコイル31〜38の上記ピーク値を比較して上記搬送ベルト10の蛇行角度θを演算し、上記θが許容範囲内にある場合には、上記θ方向に位置する内側のループコイルのピーク値PKと外側のループコイルのピーク値pkとの比から、永久磁石2と内側のループコイルとの距離rを演算して、上記パイプ状に丸められた搬送ベルト10の重合位置を特定するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置に関するものである。
【背景技術】
【0002】
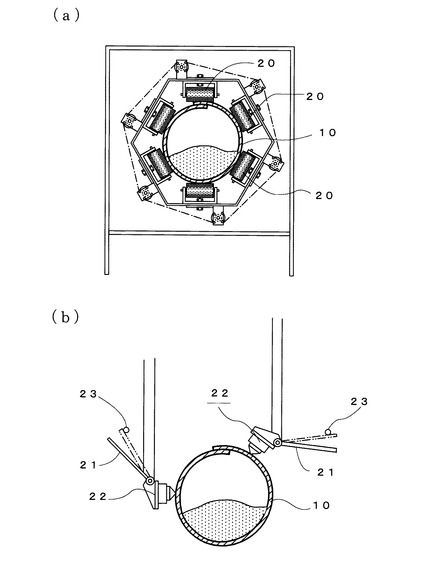
循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に粉体等の被搬送物を包み込んで搬送するパイプコンベヤにおいては、搬送中に搬送ベルトの丸められた部分が捩れないようにするため、図3(a)に示すように、上記搬送ベルト10の丸められた部分が通過する領域に、複数の矯正ローラ20を配置して、上記矯正ローラ20を上記丸められた搬送ベルト10の周囲から上記搬送ベルトに当接させながら上記搬送ベルト10を循環させるとともに、図2(b)に示すように、上記搬送ベルト10の重なり部分の近傍に、検知片21を有する一対の揺動部材22とセンサ23とを配置して、上記検知片21が上記センサ23に接触したことを検知して上記搬送ベルト10の捩れの大きさと方向とを検出し、この検出された捩れの大きさと方向とに基づいて、上記矯正ローラ20を傾斜させて上記捩れを矯正するようにしている(例えば、特許文献1参照)。
また、従来の空気浮上式ベルトコンベヤにおいては、樋状をなして走行するコンベヤベルトの両端部に永久磁石を埋設するとともに、上記ベルトの両端面を含む上下方向の走行面に、上記永久磁石からの磁界を検出するための磁気センサを多数配置し、上記各磁気センサの出力差から、上記コンベヤベルトの両端部の位置を特定して蛇行の有無を検知する方法が行なわれている(例えば、特許文献2参照)。
【0003】
しかしながら、従来の揺動部材22とセンサ23とを用いた検出方法では、搬送ベルト10の丸められた部分がどの程度内方へ潰れたかを検出することが困難であり、また、永久磁石と磁気センサを組合わせた検出方法では、多数の磁気センサ用いなければならないため、これをパイプコンベヤの捩れ状態検出に適用しようとすると、上記磁気センサの支持構造が複雑となるとともに、コスト高になるといった問題点あった。
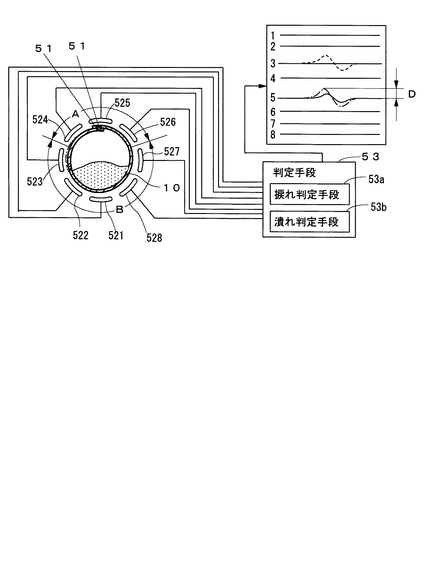
そこで、本出願人は、上記問題点を解決すべく、図4に示すように、搬送ベルト10の両端部に永久磁石51,51を設置するとともに、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように、複数のループコイル521〜528を設置して、各ループコイル521〜528の出力信号を比較し、上記パイプ状に丸められた搬送ベルト10の捩れ度合と重合部の内側への潰れ度合とが予め設定された許容限度を超えたかどうかを判定する方法を提案している(特願2005−279287号)。
具体的には、上記パイプ状に丸められた搬送ベルト10の外周側を、上記永久磁石51,51が配置された上記搬送ベルト10の重合部が捩れて移動する際の許容ゾーン(A)と非許容ゾーン(B)とに区分するとともに、上記ループコイル521〜528の出力を比較して捩れの有無を判定する判定手段53を設けて、上記許容ゾーン(A)に配置されたループコイル524〜ループコイル526が検知した上記永久磁石51からの磁力が最も大きい場合には、上記判定手段53の捩れ判定手段53aが、捩れは生じていないと判定し、他のループコイル521〜ループコイル523及ループコイル527,528が検知した上記永久磁石51からの磁力が大きい場合には、上記搬送ベルト10に捩れが生じていると判定する。また、捩れが生じていない場合には、上記判定手段53の潰れ判定手段53bにて、上記ループコイル524〜ループコイル526のうちの出力信号が最も大きいループコイルの信号のピーク値を予め設定した限界値Dと比較し、上記ピーク値が上記限界値Dを下回った場合には、潰れが生じたと判定する。これにより、上記パイプ状に丸められた搬送ベルト10の捩れ状態が許容範囲内にあるかどうかを精度よく判定することができる。
【特許文献1】特開2001−106321号公報
【特許文献2】特開平9−169423号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の方法では、パイプ状に丸められた搬送ベルトの捩れ角(蛇行角度)については求めることができるものの、ピーク値が出力されるループコイルが1個であるので、搬送ベルトが蛇行している場合には、上記搬送ベルトがどの程度内側に潰れているかについては求めることができず、搬送ベルトの捩れ状態を精度よく把握することが困難であった。
【0005】
本発明は、従来の問題点に鑑みてなされたもので、パイプコンベヤの搬送ベルトの丸められた部分の蛇行角度と潰れの度合を容易にかつ精度よく検出することのできるパイプコンベヤの捩れ状態検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本願の請求項1に記載の発明は、循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸めて、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置であって、上記搬送ベルトの端部に設置された永久磁石と、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る第1のセンサ群と、第1のセンサ群の円周方向外側に円周状に配列された複数のループコイルから成る第2のセンサ群と、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の角度を算出する手段と、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号とを比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出する手段とを備えたことを特徴とするものである。
【0007】
請求項2に記載の発明は、請求項1に記載のパイプコンベヤの捩れ状態検出装置において、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号のピーク信号強度比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置と上記ループコイルとの距離を算出するようにしたものである。
請求項3に記載の発明は、請求項1または請求項2に記載のパイプコンベヤの捩れ状態検出装置において、上記第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大であるループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにしたものである。
請求項4に記載の発明は、請求項1〜請求項3のいずれかに記載のパイプコンベヤの捩れ状態検出装置において、上記算出された重合位置の角度と上記重合位置とループコイルとの距離とから、上記重合位置を算出して表示する手段を設けたものである。
【発明の効果】
【0008】
本発明によれば、搬送ベルトの端部に永久磁石を設置するとともに、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る、搬送ベルトの中心からの距離の異なる第1及び第2のセンサ群を設置して、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の蛇行角度を推定するとともに、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出して、上記重合位置の潰れ度合を推定するようにしたので、簡単な構成で、パイプコンベヤの捩れ状態を精度よく検出することができる。
また、第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大のループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比をそれぞれ算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにすれば、重合位置の蛇行角度を更に精度よく推定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の最良の形態について、図面に基づき説明する。
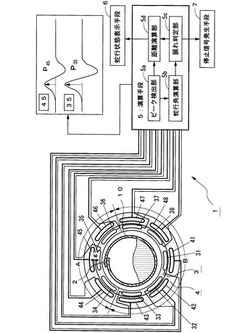
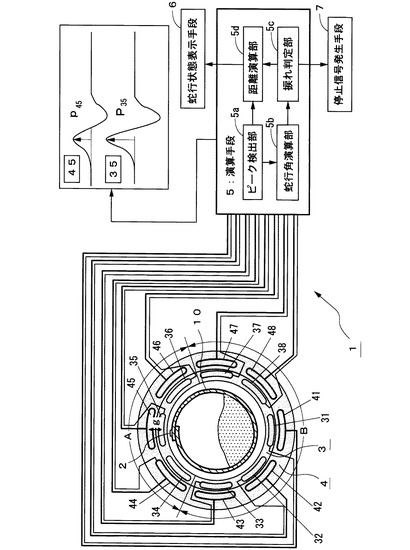
図1は、本発明の最良の形態に係るパイプコンベヤの捩れ状態検出装置1の構成を示す図で、同図において、2は搬送ベルト10の一方の端部に所定の間隔で設置された永久磁石、3は上記パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように円周状に配列された複数のループコイル31〜38を備えたる第1のセンサ群、4は上記第1のセンサ群3の円周方向外側に、上記第1のセンサ群の各ループコイル31〜38とそれぞれ所定の距離gだけ離隔して配列された複数のループコイル41〜48を備えた第2のセンサ群、5は上記ループコイル31〜38及びループコイル41〜48の出力信号を処理してそれぞれのピーク値を検出するピーク検出部5aと、上記ピーク検出部5aで検出された第1のセンサ群3の各ループコイル31〜38の出力信号のピーク値を比較して、上記永久磁石2と、上記パイプ状に丸められた搬送ベルト10が捩れていない状態での上記搬送ベルト10の中心との角度である蛇行角度θを演算する蛇行角演算部5bと、上記蛇行角度θが所定の値(ここでは、θ=±45°)を超えたときには、許容範囲を超える捩れが発生している判定する捩れ判定手段5cと、上記捩れ判定手段5cが捩れが許容範囲内であると判定した場合に、上記蛇行角度θ方向に位置する第1のセンサ群3のループコイルK(K=34,35,36)のピーク値PKと第2のセンサ群4のループコイルk(k=44,45,46)のピーク値pkとの比から、上記永久磁石2と上記第1のセンサ群3との距離rを演算する距離演算部5dとを備えた演算手段、6は上記演算手段5で演算された蛇行角度θと距離rとから、上記パイプ状に丸められた搬送ベルト10の重合位置を特定して、上記パイプ状に丸められた搬送ベルト10の捩れ状態を表示する表示手段で、7は捩れ判定手段5cが許容範囲を超える捩れが発生していると判定したときに、図示しないコンベヤ制御装置に作動停止信号を出力する停止信号発生手段である。
なお、許容ゾーン(A)と非許容ゾーン(B)との区分については、図4に示したものと同様で、第1のセンサ群3のループコイル34,35,36、及び、第2のセンサ群4のループコイル44,45,46が配置されている領域が許容ゾーン(A)で、それ以外のループコイルが配置されている領域が非許容ゾーン(B)である。
【0010】
次に、上記構成の捩れ状態検出装置1を用いてパイプ状に丸められた搬送ベルト10の捩れ状態を検出する方法について説明する。
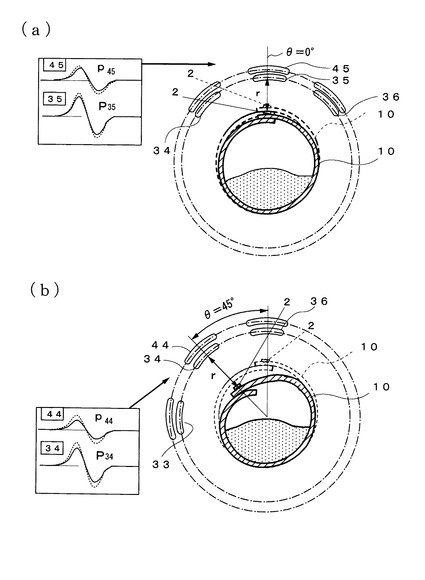
図2(a)に示すように、パイプ状に丸められた搬送ベルト10が捩じれてはいないが、内側に若干潰れている場合には、上記永久磁石2との距離が最も小さいループコイルは上記搬送ベルト10の真上に配置されたループコイル35,45なので、演算手段のピーク検出部5aでは、第1のセンサ群3のループコイル35の出力信号と第2のセンサ群4のループコイル45の出力信号のみが検出される。また、蛇行角演算部5bは、予め記憶しておいたループコイルの位置と蛇行角度との関係に基づいて、上記搬送ベルト10の蛇行角度をθ=0°として出力する。捩れ判定手段5cは上記蛇行角度θを許容範囲内であると判定し、距離演算部5dに上記永久磁石2と上記第1のセンサ群3との距離rを演算する指令を出力する。
距離演算部5dでは上記指令に基づき、上記ピーク検出部5aで検出された第1のセンサ群3のループコイル35のピーク値P35と第2のセンサ群4のループコイル45のピーク値p45との比であるピーク信号強度比X=(P35/p45)を演算するとともに、予め実験で求めておいた、上記距離rと上記ピーク信号強度比Xとの関係を示す下記の近似式(1)を用いて、永久磁石2と第1のセンサ群3との距離rを算出する。
X2=a・r2+br+c‥‥(1)
a,b,cは定数
上記距離演算部5dで求められた距離rと蛇行角演算部5bで求められた蛇行角度θは表示手段6に送られ、図2(a)に示すような、パイプ状に丸められた搬送ベルト10が図示しないディスプレイ上に表示される。
【0011】
また、図2(b)に示すように、パイプ状に丸められた搬送ベルト10が蛇行し、かつ、内側に若干潰れている場合には、上記搬送ベルト10の斜め上方に配置された第1のセンサ群3のループコイル34の出力信号と第2のセンサ群4のループコイル44の出力信号のみが検出される。蛇行角演算部5bは、上記ループコイル34の位置から、搬送ベルト10の蛇行角度をθ=45°として出力する。捩れ判定手段5cは上記蛇行角度θを許容範囲内であると判定し、距離演算部5dに上記永久磁石2と上記第1のセンサ群3との距離rを演算する指令を出力する。距離演算部5dでは上記指令に基づき、上記の、パイプ状に丸められた搬送ベルト10が捩じれてはいないが、内側に若干潰れている場合と同様にして、永久磁石2と第1のセンサ群3との距離rを算出する。
上記距離演算部5dで求められた距離rと蛇行角演算部5bで求められた蛇行角度θは表示手段6に送られ、図2(b)に示すような、パイプ状に丸められた搬送ベルト10が図示しないディスプレイ上に表示される。
また、パイプ状に丸められた搬送ベルト10の捩じれが大きく、許容ゾーン(A)に配置されたループコイル34,35,36に出力信号のピークが現れなかった場合には、蛇行角演算部5bは、上記搬送ベルト10の蛇行角度θが許容範囲を超えていると判定し距離rの演算を行わず、停止信号発生手段7に作動停止信号を出力する指令を出力する。
【0012】
このように、本最良の形態によれば、搬送ベルト10の一方の端部に永久磁石2を所定の間隔で設置し、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように複数のループコイル31〜38を円周状に配列するとともに、上記ループコイル31〜38の円周方向外側に、上記所定の距離gだけ離隔して複数のループコイル41〜48を配列して、上記ループコイル31〜38及びループコイル41〜48の出力信号のピーク値を検出し、上記ループコイル31〜38の出力信号のピーク値を比較して上記搬送ベルト10の蛇行角度θを演算し、上記蛇行角度θが許容範囲内にある場合には、上記蛇行角度θ方向に位置する内側のループコイルのピーク値PKと外側のループコイルのピーク値pkとの比から、永久磁石2と内側のループコイルとの距離rを演算して、上記パイプ状に丸められた搬送ベルト10の重合位置を特定するようにしたので、上記搬送ベルト10の丸められた部分の蛇行角度と潰れの度合とを容易にかつ精度よく検出することができる。
【0013】
なお、上記最良の形態では、永久磁石2を搬送ベルト10の一方の端部のみに配置したが、永久磁石2を搬送ベルト10の両端部に配置するとともに、上記搬送ベルト10を丸めたときに、一方の永久磁石のN極と他方の永久磁石のS極とが対向するように配置してもよい。また、永久磁石2の間隔は狭い方がよいが、不必要に数を増やすのは効率的ではないので、搬送物の最大重量やパイプコンベヤの長さ等により適宜決定すればよい。
また、上記例では、パイプ状に丸められた搬送ベルト10の外周側を8つの領域に分け、真上の領域とその両隣の領域とを許容ゾーン(A)としたが、領域の区分についてはこれに限るものではなく、6分割あるいは12分割などであってもよい。
また、上記例では、永久磁石2が非許容ゾーン(B)にあるときには、距離rの演算を省略したが、許容ゾーン(A)にある場合と同様に、距離rを演算してパイプ状に丸められた搬送ベルト10の捩れ状態を求めるようにしてもよい。
【0014】
また、上記例では、永久磁石2に最も近い角度に位置するループコイル以外はループコイルのピーク値PKが小さいものとしたが、上記永久磁石2の作る磁力の大きさやループコイルの巻数や形状を変えて、検出されるループコイルのピーク値PKを大きくするようにすれば、検出精度を更に向上させることができる。
また、このときには、他のループコイルのピーク値PKもある程度大きくすることができるので、円周方向に隣接する2個以上のループコイルのピーク値を比較すれば、上記重合位置の角度を更に精度よく算出することができる。例えば、第1のセンサ群3のループコイル31〜38のうち、出力信号のピーク信号強度(ピーク値)が最大であるループコイルの番号がkであったとすると、このとき、上記ループコイルkに隣接するループコイル(k−1),(k+1)についてもそれぞれピーク値を求め、その強度比Pk-1:Pk:Pk+1を求める。この強度比は永久磁石2の位置により決まるので、蛇行角度θと上記強度比との関係を調べたり、数値解析するなどして蛇行角度θの較正曲線を予め求めておき、この較正曲線を用いて蛇行角度θを算出する。これにより、例えば、ループコイル35のP35が最大のときには単にθ=0°とするのではなく、P34:P35:P36=1:10:1ならθ=0°であり、P34:P35:P36=1:7:2ならθ=5°であるというように、蛇行角度θを精度よく推定することができる。
上記強度比は、ピーク値が最大であるループコイルkと上記ループコイルkに隣接するループコイル(k−1),(k+1)のうちのピーク値が大きい方のループコイルのピーク信号強度比のように2つのループコイルのピーク信号強度比であってもよいし、4個以上のループコイルのピーク信号強度比であってもよい。
なお、第2のセンサ群4を用いても同様のことが可能だが、蛇行角度θの推定は、出力の大きい第1のセンサ群3を用いる方が有利である。
これにより、上記パイプ状に丸められた搬送ベルト10の重合位置を更に正確に特定することができる。
【産業上の利用可能性】
【0015】
このように、本発明によれば、パイプコンベヤの捩れ状態を容易にかつ精度よく検出することができるので、上記捩れ状態のデータをフィードバックして上記丸められた搬送ベルトの捩れ状態を修正するようにすれば、パイプコンベヤを安定して作動させることができ、搬送物を確実に搬送することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の最良の形態に係るパイプコンベヤの捩れ状態検出装置の構成を示す図である。
【図2】パイプコンベヤの捩れ状態を示す図である。
【図3】従来のパイプコンベヤの捩れ状態の検出方法の一例を示す図である。
【図4】従来のパイプコンベヤの捩れ状態の検出方法の他の例を示す図である。
【符号の説明】
【0017】
1 パイプコンベヤの捩れ状態検出装置、2 永久磁石、3 第1のセンサ群、
31〜38 第1のセンサ群のループコイル、4 第1のセンサ群、
41〜48 第2のセンサ群のループコイル、5 演算手段、5a ピーク検出部、
5b 蛇行角演算部、5c 捩れ判定手段、5d 距離演算部、6 表示手段、
7 停止信号発生手段。
【技術分野】
【0001】
本発明は、循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置に関するものである。
【背景技術】
【0002】
循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に粉体等の被搬送物を包み込んで搬送するパイプコンベヤにおいては、搬送中に搬送ベルトの丸められた部分が捩れないようにするため、図3(a)に示すように、上記搬送ベルト10の丸められた部分が通過する領域に、複数の矯正ローラ20を配置して、上記矯正ローラ20を上記丸められた搬送ベルト10の周囲から上記搬送ベルトに当接させながら上記搬送ベルト10を循環させるとともに、図2(b)に示すように、上記搬送ベルト10の重なり部分の近傍に、検知片21を有する一対の揺動部材22とセンサ23とを配置して、上記検知片21が上記センサ23に接触したことを検知して上記搬送ベルト10の捩れの大きさと方向とを検出し、この検出された捩れの大きさと方向とに基づいて、上記矯正ローラ20を傾斜させて上記捩れを矯正するようにしている(例えば、特許文献1参照)。
また、従来の空気浮上式ベルトコンベヤにおいては、樋状をなして走行するコンベヤベルトの両端部に永久磁石を埋設するとともに、上記ベルトの両端面を含む上下方向の走行面に、上記永久磁石からの磁界を検出するための磁気センサを多数配置し、上記各磁気センサの出力差から、上記コンベヤベルトの両端部の位置を特定して蛇行の有無を検知する方法が行なわれている(例えば、特許文献2参照)。
【0003】
しかしながら、従来の揺動部材22とセンサ23とを用いた検出方法では、搬送ベルト10の丸められた部分がどの程度内方へ潰れたかを検出することが困難であり、また、永久磁石と磁気センサを組合わせた検出方法では、多数の磁気センサ用いなければならないため、これをパイプコンベヤの捩れ状態検出に適用しようとすると、上記磁気センサの支持構造が複雑となるとともに、コスト高になるといった問題点あった。
そこで、本出願人は、上記問題点を解決すべく、図4に示すように、搬送ベルト10の両端部に永久磁石51,51を設置するとともに、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように、複数のループコイル521〜528を設置して、各ループコイル521〜528の出力信号を比較し、上記パイプ状に丸められた搬送ベルト10の捩れ度合と重合部の内側への潰れ度合とが予め設定された許容限度を超えたかどうかを判定する方法を提案している(特願2005−279287号)。
具体的には、上記パイプ状に丸められた搬送ベルト10の外周側を、上記永久磁石51,51が配置された上記搬送ベルト10の重合部が捩れて移動する際の許容ゾーン(A)と非許容ゾーン(B)とに区分するとともに、上記ループコイル521〜528の出力を比較して捩れの有無を判定する判定手段53を設けて、上記許容ゾーン(A)に配置されたループコイル524〜ループコイル526が検知した上記永久磁石51からの磁力が最も大きい場合には、上記判定手段53の捩れ判定手段53aが、捩れは生じていないと判定し、他のループコイル521〜ループコイル523及ループコイル527,528が検知した上記永久磁石51からの磁力が大きい場合には、上記搬送ベルト10に捩れが生じていると判定する。また、捩れが生じていない場合には、上記判定手段53の潰れ判定手段53bにて、上記ループコイル524〜ループコイル526のうちの出力信号が最も大きいループコイルの信号のピーク値を予め設定した限界値Dと比較し、上記ピーク値が上記限界値Dを下回った場合には、潰れが生じたと判定する。これにより、上記パイプ状に丸められた搬送ベルト10の捩れ状態が許容範囲内にあるかどうかを精度よく判定することができる。
【特許文献1】特開2001−106321号公報
【特許文献2】特開平9−169423号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の方法では、パイプ状に丸められた搬送ベルトの捩れ角(蛇行角度)については求めることができるものの、ピーク値が出力されるループコイルが1個であるので、搬送ベルトが蛇行している場合には、上記搬送ベルトがどの程度内側に潰れているかについては求めることができず、搬送ベルトの捩れ状態を精度よく把握することが困難であった。
【0005】
本発明は、従来の問題点に鑑みてなされたもので、パイプコンベヤの搬送ベルトの丸められた部分の蛇行角度と潰れの度合を容易にかつ精度よく検出することのできるパイプコンベヤの捩れ状態検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本願の請求項1に記載の発明は、循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸めて、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置であって、上記搬送ベルトの端部に設置された永久磁石と、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る第1のセンサ群と、第1のセンサ群の円周方向外側に円周状に配列された複数のループコイルから成る第2のセンサ群と、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の角度を算出する手段と、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号とを比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出する手段とを備えたことを特徴とするものである。
【0007】
請求項2に記載の発明は、請求項1に記載のパイプコンベヤの捩れ状態検出装置において、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号のピーク信号強度比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置と上記ループコイルとの距離を算出するようにしたものである。
請求項3に記載の発明は、請求項1または請求項2に記載のパイプコンベヤの捩れ状態検出装置において、上記第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大であるループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにしたものである。
請求項4に記載の発明は、請求項1〜請求項3のいずれかに記載のパイプコンベヤの捩れ状態検出装置において、上記算出された重合位置の角度と上記重合位置とループコイルとの距離とから、上記重合位置を算出して表示する手段を設けたものである。
【発明の効果】
【0008】
本発明によれば、搬送ベルトの端部に永久磁石を設置するとともに、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る、搬送ベルトの中心からの距離の異なる第1及び第2のセンサ群を設置して、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の蛇行角度を推定するとともに、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出して、上記重合位置の潰れ度合を推定するようにしたので、簡単な構成で、パイプコンベヤの捩れ状態を精度よく検出することができる。
また、第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大のループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比をそれぞれ算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにすれば、重合位置の蛇行角度を更に精度よく推定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の最良の形態について、図面に基づき説明する。
図1は、本発明の最良の形態に係るパイプコンベヤの捩れ状態検出装置1の構成を示す図で、同図において、2は搬送ベルト10の一方の端部に所定の間隔で設置された永久磁石、3は上記パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように円周状に配列された複数のループコイル31〜38を備えたる第1のセンサ群、4は上記第1のセンサ群3の円周方向外側に、上記第1のセンサ群の各ループコイル31〜38とそれぞれ所定の距離gだけ離隔して配列された複数のループコイル41〜48を備えた第2のセンサ群、5は上記ループコイル31〜38及びループコイル41〜48の出力信号を処理してそれぞれのピーク値を検出するピーク検出部5aと、上記ピーク検出部5aで検出された第1のセンサ群3の各ループコイル31〜38の出力信号のピーク値を比較して、上記永久磁石2と、上記パイプ状に丸められた搬送ベルト10が捩れていない状態での上記搬送ベルト10の中心との角度である蛇行角度θを演算する蛇行角演算部5bと、上記蛇行角度θが所定の値(ここでは、θ=±45°)を超えたときには、許容範囲を超える捩れが発生している判定する捩れ判定手段5cと、上記捩れ判定手段5cが捩れが許容範囲内であると判定した場合に、上記蛇行角度θ方向に位置する第1のセンサ群3のループコイルK(K=34,35,36)のピーク値PKと第2のセンサ群4のループコイルk(k=44,45,46)のピーク値pkとの比から、上記永久磁石2と上記第1のセンサ群3との距離rを演算する距離演算部5dとを備えた演算手段、6は上記演算手段5で演算された蛇行角度θと距離rとから、上記パイプ状に丸められた搬送ベルト10の重合位置を特定して、上記パイプ状に丸められた搬送ベルト10の捩れ状態を表示する表示手段で、7は捩れ判定手段5cが許容範囲を超える捩れが発生していると判定したときに、図示しないコンベヤ制御装置に作動停止信号を出力する停止信号発生手段である。
なお、許容ゾーン(A)と非許容ゾーン(B)との区分については、図4に示したものと同様で、第1のセンサ群3のループコイル34,35,36、及び、第2のセンサ群4のループコイル44,45,46が配置されている領域が許容ゾーン(A)で、それ以外のループコイルが配置されている領域が非許容ゾーン(B)である。
【0010】
次に、上記構成の捩れ状態検出装置1を用いてパイプ状に丸められた搬送ベルト10の捩れ状態を検出する方法について説明する。
図2(a)に示すように、パイプ状に丸められた搬送ベルト10が捩じれてはいないが、内側に若干潰れている場合には、上記永久磁石2との距離が最も小さいループコイルは上記搬送ベルト10の真上に配置されたループコイル35,45なので、演算手段のピーク検出部5aでは、第1のセンサ群3のループコイル35の出力信号と第2のセンサ群4のループコイル45の出力信号のみが検出される。また、蛇行角演算部5bは、予め記憶しておいたループコイルの位置と蛇行角度との関係に基づいて、上記搬送ベルト10の蛇行角度をθ=0°として出力する。捩れ判定手段5cは上記蛇行角度θを許容範囲内であると判定し、距離演算部5dに上記永久磁石2と上記第1のセンサ群3との距離rを演算する指令を出力する。
距離演算部5dでは上記指令に基づき、上記ピーク検出部5aで検出された第1のセンサ群3のループコイル35のピーク値P35と第2のセンサ群4のループコイル45のピーク値p45との比であるピーク信号強度比X=(P35/p45)を演算するとともに、予め実験で求めておいた、上記距離rと上記ピーク信号強度比Xとの関係を示す下記の近似式(1)を用いて、永久磁石2と第1のセンサ群3との距離rを算出する。
X2=a・r2+br+c‥‥(1)
a,b,cは定数
上記距離演算部5dで求められた距離rと蛇行角演算部5bで求められた蛇行角度θは表示手段6に送られ、図2(a)に示すような、パイプ状に丸められた搬送ベルト10が図示しないディスプレイ上に表示される。
【0011】
また、図2(b)に示すように、パイプ状に丸められた搬送ベルト10が蛇行し、かつ、内側に若干潰れている場合には、上記搬送ベルト10の斜め上方に配置された第1のセンサ群3のループコイル34の出力信号と第2のセンサ群4のループコイル44の出力信号のみが検出される。蛇行角演算部5bは、上記ループコイル34の位置から、搬送ベルト10の蛇行角度をθ=45°として出力する。捩れ判定手段5cは上記蛇行角度θを許容範囲内であると判定し、距離演算部5dに上記永久磁石2と上記第1のセンサ群3との距離rを演算する指令を出力する。距離演算部5dでは上記指令に基づき、上記の、パイプ状に丸められた搬送ベルト10が捩じれてはいないが、内側に若干潰れている場合と同様にして、永久磁石2と第1のセンサ群3との距離rを算出する。
上記距離演算部5dで求められた距離rと蛇行角演算部5bで求められた蛇行角度θは表示手段6に送られ、図2(b)に示すような、パイプ状に丸められた搬送ベルト10が図示しないディスプレイ上に表示される。
また、パイプ状に丸められた搬送ベルト10の捩じれが大きく、許容ゾーン(A)に配置されたループコイル34,35,36に出力信号のピークが現れなかった場合には、蛇行角演算部5bは、上記搬送ベルト10の蛇行角度θが許容範囲を超えていると判定し距離rの演算を行わず、停止信号発生手段7に作動停止信号を出力する指令を出力する。
【0012】
このように、本最良の形態によれば、搬送ベルト10の一方の端部に永久磁石2を所定の間隔で設置し、パイプ状に丸められた搬送ベルト10が通過する位置に、上記搬送ベルト10を囲むように複数のループコイル31〜38を円周状に配列するとともに、上記ループコイル31〜38の円周方向外側に、上記所定の距離gだけ離隔して複数のループコイル41〜48を配列して、上記ループコイル31〜38及びループコイル41〜48の出力信号のピーク値を検出し、上記ループコイル31〜38の出力信号のピーク値を比較して上記搬送ベルト10の蛇行角度θを演算し、上記蛇行角度θが許容範囲内にある場合には、上記蛇行角度θ方向に位置する内側のループコイルのピーク値PKと外側のループコイルのピーク値pkとの比から、永久磁石2と内側のループコイルとの距離rを演算して、上記パイプ状に丸められた搬送ベルト10の重合位置を特定するようにしたので、上記搬送ベルト10の丸められた部分の蛇行角度と潰れの度合とを容易にかつ精度よく検出することができる。
【0013】
なお、上記最良の形態では、永久磁石2を搬送ベルト10の一方の端部のみに配置したが、永久磁石2を搬送ベルト10の両端部に配置するとともに、上記搬送ベルト10を丸めたときに、一方の永久磁石のN極と他方の永久磁石のS極とが対向するように配置してもよい。また、永久磁石2の間隔は狭い方がよいが、不必要に数を増やすのは効率的ではないので、搬送物の最大重量やパイプコンベヤの長さ等により適宜決定すればよい。
また、上記例では、パイプ状に丸められた搬送ベルト10の外周側を8つの領域に分け、真上の領域とその両隣の領域とを許容ゾーン(A)としたが、領域の区分についてはこれに限るものではなく、6分割あるいは12分割などであってもよい。
また、上記例では、永久磁石2が非許容ゾーン(B)にあるときには、距離rの演算を省略したが、許容ゾーン(A)にある場合と同様に、距離rを演算してパイプ状に丸められた搬送ベルト10の捩れ状態を求めるようにしてもよい。
【0014】
また、上記例では、永久磁石2に最も近い角度に位置するループコイル以外はループコイルのピーク値PKが小さいものとしたが、上記永久磁石2の作る磁力の大きさやループコイルの巻数や形状を変えて、検出されるループコイルのピーク値PKを大きくするようにすれば、検出精度を更に向上させることができる。
また、このときには、他のループコイルのピーク値PKもある程度大きくすることができるので、円周方向に隣接する2個以上のループコイルのピーク値を比較すれば、上記重合位置の角度を更に精度よく算出することができる。例えば、第1のセンサ群3のループコイル31〜38のうち、出力信号のピーク信号強度(ピーク値)が最大であるループコイルの番号がkであったとすると、このとき、上記ループコイルkに隣接するループコイル(k−1),(k+1)についてもそれぞれピーク値を求め、その強度比Pk-1:Pk:Pk+1を求める。この強度比は永久磁石2の位置により決まるので、蛇行角度θと上記強度比との関係を調べたり、数値解析するなどして蛇行角度θの較正曲線を予め求めておき、この較正曲線を用いて蛇行角度θを算出する。これにより、例えば、ループコイル35のP35が最大のときには単にθ=0°とするのではなく、P34:P35:P36=1:10:1ならθ=0°であり、P34:P35:P36=1:7:2ならθ=5°であるというように、蛇行角度θを精度よく推定することができる。
上記強度比は、ピーク値が最大であるループコイルkと上記ループコイルkに隣接するループコイル(k−1),(k+1)のうちのピーク値が大きい方のループコイルのピーク信号強度比のように2つのループコイルのピーク信号強度比であってもよいし、4個以上のループコイルのピーク信号強度比であってもよい。
なお、第2のセンサ群4を用いても同様のことが可能だが、蛇行角度θの推定は、出力の大きい第1のセンサ群3を用いる方が有利である。
これにより、上記パイプ状に丸められた搬送ベルト10の重合位置を更に正確に特定することができる。
【産業上の利用可能性】
【0015】
このように、本発明によれば、パイプコンベヤの捩れ状態を容易にかつ精度よく検出することができるので、上記捩れ状態のデータをフィードバックして上記丸められた搬送ベルトの捩れ状態を修正するようにすれば、パイプコンベヤを安定して作動させることができ、搬送物を確実に搬送することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の最良の形態に係るパイプコンベヤの捩れ状態検出装置の構成を示す図である。
【図2】パイプコンベヤの捩れ状態を示す図である。
【図3】従来のパイプコンベヤの捩れ状態の検出方法の一例を示す図である。
【図4】従来のパイプコンベヤの捩れ状態の検出方法の他の例を示す図である。
【符号の説明】
【0017】
1 パイプコンベヤの捩れ状態検出装置、2 永久磁石、3 第1のセンサ群、
31〜38 第1のセンサ群のループコイル、4 第1のセンサ群、
41〜48 第2のセンサ群のループコイル、5 演算手段、5a ピーク検出部、
5b 蛇行角演算部、5c 捩れ判定手段、5d 距離演算部、6 表示手段、
7 停止信号発生手段。
【特許請求の範囲】
【請求項1】
循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置であって、上記搬送ベルトの端部に設置された永久磁石と、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る第1のセンサ群と、第1のセンサ群の円周方向外側に円周状に配列された複数のループコイルから成る第2のセンサ群と、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の角度を算出する手段と、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号とを比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出する手段とを備えたことを特徴とするパイプコンベヤの捩れ状態検出装置。
【請求項2】
上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号のピーク信号強度比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置と上記ループコイルとの距離を算出するようにしたことを特徴とする請求項1に記載のパイプコンベヤの捩れ状態検出装置。
【請求項3】
上記第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大であるループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにしたことを特徴とする請求項1または請求項2に記載のパイプコンベヤの捩れ状態検出装置。
【請求項4】
上記算出された重合位置の角度と上記重合位置とループコイルとの距離とから、上記重合位置を算出して表示する手段を設けたことを特徴とする請求項1〜請求項3のいずれかに記載のパイプコンベヤの捩れ状態検出装置。
【請求項1】
循環走行する無端の帯状搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するパイプコンベヤの捩れ状態を検出する装置であって、上記搬送ベルトの端部に設置された永久磁石と、上記パイプ状に丸められた搬送ベルトが通過する位置に、上記搬送ベルトを囲むように円周状に配列された複数のループコイルから成る第1のセンサ群と、第1のセンサ群の円周方向外側に円周状に配列された複数のループコイルから成る第2のセンサ群と、上記第1または第2のセンサ群の各ループコイルの出力信号を比較して、上記パイプ状に丸められた搬送ベルトの重合位置の角度を算出する手段と、上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号とを比較して、上記パイプ状に丸められた搬送ベルトの重合位置と上記ループコイルとの距離を算出する手段とを備えたことを特徴とするパイプコンベヤの捩れ状態検出装置。
【請求項2】
上記第1のセンサ群のループコイルと、このループコイルと上記搬送ベルトの中心からの角度が等しい位置に位置する上記第2のセンサ群のループコイルの出力信号のピーク信号強度比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置と上記ループコイルとの距離を算出するようにしたことを特徴とする請求項1に記載のパイプコンベヤの捩れ状態検出装置。
【請求項3】
上記第1または第2のセンサ群のループコイルのうち、出力信号のピーク信号強度が最大であるループコイルと、このループコイルに隣接する少なくとも1つのループコイルを含む複数のループコイルの出力信号のピーク信号強度と上記最大強度のピーク信号強度との比を算出し、上記算出されたピーク信号強度比に基づいて、上記重合位置の角度を算出するようにしたことを特徴とする請求項1または請求項2に記載のパイプコンベヤの捩れ状態検出装置。
【請求項4】
上記算出された重合位置の角度と上記重合位置とループコイルとの距離とから、上記重合位置を算出して表示する手段を設けたことを特徴とする請求項1〜請求項3のいずれかに記載のパイプコンベヤの捩れ状態検出装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−210722(P2007−210722A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−30472(P2006−30472)
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月8日(2006.2.8)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
[ Back to top ]