
パイプコンベヤベルト
【課題】搬送ベルトに捩れが生じたときに搬送ベルトの捩れを自動で矯正することができるパイプコンベヤベルトを提供する。
【解決手段】搬送ベルト3に埋設された永久磁石6、7が磁気センサ8の近傍を通過すると、複数の磁気センサ8が磁石の磁界を検知し、検知された信号をデータ収集装置9が収集する。制御装置10は、磁気センサ8により検出した磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出し、捩れ角度に応じて警報装置11に警報信号を出力し、円形保持ローラのローラ支持装置に備える円形保持ローラ駆動装置12に制御信号を出力して搬送ベルトの捩れを矯正し、さらに、丸めローラのローラ支持装置に備える丸めローラ駆動装置13に制御信号を出力して搬送ベルトの捩れを矯正する。
【解決手段】搬送ベルト3に埋設された永久磁石6、7が磁気センサ8の近傍を通過すると、複数の磁気センサ8が磁石の磁界を検知し、検知された信号をデータ収集装置9が収集する。制御装置10は、磁気センサ8により検出した磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出し、捩れ角度に応じて警報装置11に警報信号を出力し、円形保持ローラのローラ支持装置に備える円形保持ローラ駆動装置12に制御信号を出力して搬送ベルトの捩れを矯正し、さらに、丸めローラのローラ支持装置に備える丸めローラ駆動装置13に制御信号を出力して搬送ベルトの捩れを矯正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、循環走行する無端帯状の搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するようにしたパイプコンベヤベルトに関する。
【背景技術】
【0002】
従来、循環走行する無端帯状の搬送ベルトの一部分をパイプ状に丸め、その内部に粉体や粒状体等の被運搬物を包み込んで搬送するようにしたパイプコンベヤベルトが広く知られている。このパイプコンベヤベルトでは、パイプ状に丸められた搬送ベルトを、ほぼ環状に配置したガイドローラ(円形保持ローラ)内を通過させて案内支持するが、このガイドローラは、一般に金属製であることから表面が平滑であるため、パイプコンベヤベルトが露天設置機体の場合には、雨天時にスリップが発生し易く、また、粉体や粒状体等の被運搬物が付着して、部分的に摩擦力が変化して、搬送ベルトに捩れを生ずることがある。
【0003】
この搬送ベルトの捩れを修正するものとして、特許文献1には、支持ブラケットに長穴を形成し、ガイドローラを支持するローラブラケットと支持ブラケットとを長穴に挿通させた締結部材を介して回転可能に連結し、ローラブラケットに、ローリング調整用ハンドルを設けて、手動式で搬送ベルトのローリング(捩れ)を矯正するローリング調整装置が提案されている。
【0004】
また、特許文献2には、搬送ベルトに埋め込まれた永久磁石の磁気強度をベルトの周り全周に設置した磁気センサを用いて測定し、パイプ状の搬送ベルトの捩れおよび潰れの判別有無を判断できるようにしたパイプコンベヤベルトが開示されている。
【特許文献1】特開2001−139115号公報
【特許文献2】特開2007−91356号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載されているものにおいては、搬送ベルトの捩れ矯正を手動で行っており、自動で行うことができないという問題がある。
また、特許文献2には、パイプ状に丸められた搬送ベルトの捩れおよび潰れの有無を自動で検出するだけであり、搬送ベルトの捩れを調整する手段については開示がされていない。
【0006】
本発明は、このような問題点に鑑みてなされたものであり、本発明の目的は、搬送ベルトに捩れが生じたときに搬送ベルトの捩れを自動で矯正することができるパイプコンベヤベルトを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備えると共に、前記第1の矯正手段を制御する制御手段を設けたことを特徴とする。
【0008】
また、本発明は、無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備え、前記搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持する第2の機体に、前記搬送ベルトの捩れを矯正する第2の矯正手段を備えると共に、前記第1および第2の矯正手段を制御する制御手段を設けたことを特徴とする。
【0009】
また、本発明は、前記搬送ベルトの捩れを検出するモニタリングシステムを更に備ることが好ましい。
【0010】
前記モニタリングシステムは、ベルト側送信手段と、前記ベルト側送信手段の位置を検出する機体側受信手段とで構成され、前記機体側受信手段の検出値に基づいて捩れを検出することが好ましく、前記ベルト側送信手段は、ベルト内に埋設された永久磁石であり、前記機体側受信手段は磁気センサであることが好ましい。
【0011】
また、前記第1および第2の矯正手段は、前記モニタリングシステムの検出値を基に、前記制御手段で自動制御されることが好ましく、また、前記第1の矯正手段は、丸めローラと、丸めローラの位置を制御するアクチュエータとで構成され、前記第2の矯正手段は、円形保持ローラと、円形保持ローラの位置を制御するアクチュエータとで構成されることが好ましい。
【0012】
また、本発明は、無端帯状の搬送ベルトを循環走行可能に案内支持する円形保持ローラと、前記搬送ベルトを丸めるように案内支持する丸めローラとを備え、前記搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法であって、前記搬送ベルトの捩れを検出し、搬送ベルトの捩れの矯正が必要な場合は、前記円形保持ローラにより前記搬送ベルトの捩れを矯正し、前記円形保持ローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、前記丸めローラにより前記搬送ベルトの捩れを矯正することを特徴とする。
【0013】
本発明は、前記丸めローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、警報を発信し、および/または前記搬送ベルトを停止することが好ましい。
【発明の効果】
【0014】
本発明によれば、搬送ベルトを案内支持するガイドローラを支持する機体に、搬送ベルトの捩れを矯正する矯正手段を備えるようにしたので、搬送ベルトに捩れが生じたときに搬送ベルトの捩れを矯正することができることができる。
【0015】
また、本発明によれば、搬送ベルトを丸めるように案内支持するガイドローラを支持する機体と、搬送ベルトを循環走行可能に案内支持するガイドローラを支持する機体に、搬送ベルトの捩れを矯正する矯正手段を備えるようにすることにより、搬送ベルトに捩れが生じたときに、より効果的に搬送ベルトの捩れを矯正することができることができる。
【0016】
また、本発明によれば、搬送ベルトに捩れが生じたときに、搬送ベルトの捩れを自動で矯正することができる。
【発明を実施するための最良の形態】
【0017】
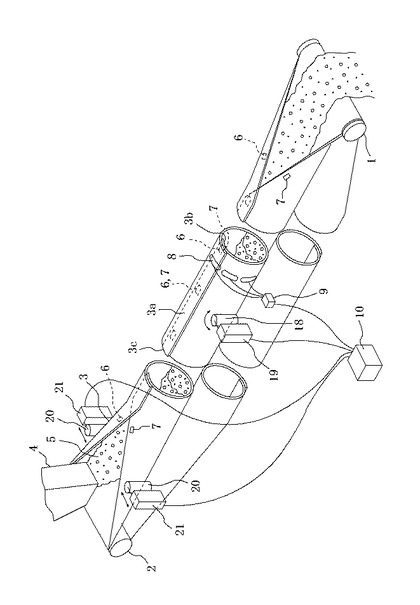
本発明の実施の形態について図面を参照して説明する。図1は、搬送ベルトの一部がパイプ状となって被搬送物を包み込んで搬送するパイプコンベヤベルトの斜視図である。図1に示すパイプコンベヤベルトは、前部プーリ1と後部プーリ2とに無端帯状の搬送ベルト3を掛け回し、前部プーリ1と後部プーリ2とのいずれか一方を、モータ等の駆動手段により回転させることによって、搬送ベルト3を循環走行させ、搬送ベルト3の往路側である往路ベルトと、復路側である復路ベルトの中間部を、複数の円形保持ローラをほぼ環状または樋状に配設してなる案内枠(図示略)の内部を通過させることにより、搬送ベルト3を、その一方の側部3aの表面(搬送面)が、他方の側部3bの裏面に接触するようにして、両測部3a、3bが互いに重合するパイプ状に丸め、その中に、後部プーリ2寄りの上方に配設したホッパ4から供給された被搬送物5を、包み込んで搬送するようになっている。
【0018】
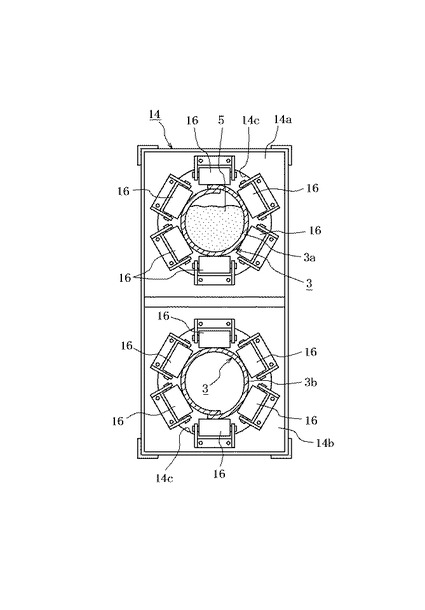
図2は、複数の円形保持ローラを配設してなる案内枠を示す図である。前部プーリ1と後部プーリ2との間には、方形枠状をなす複数の案内枠が、搬送ベルト3の進行方向にほぼ一定間隔を持って配設されている。図2に示すように、案内枠14は、上室14aと下室14bに分かれ、その上室14aの中央に形成された窓穴14cを、搬送ベルト3の往路側である往路ベルト3aが、窓穴14cの周縁にほぼ環状に配設された複数の円形保持ローラ16によって案内支持されて通過するようになっており、また、下室14bの中央に形成された窓穴14cを、搬送ベルト3の復路側である復路ベルト3bが、窓穴14cの周縁にほぼ環状に配設された複数本(6本)の円形保持ローラ16によって案内支持されて通過するようになっている。
【0019】
図1に示すパイプコンベヤベルトでは、パイプ状に丸められたときに互いに重合する搬送ベルト3の一方の側部3aの裏面と、他方の側部3bの表面との対向面には、それぞれが磁性吸着体をなす複数の永久磁石6、7が、搬送ベルト3の長手方向に適宜の間隔をもって、また互いの対向面の極性が異なるようにして埋設されている。
【0020】
また、図3に示すように、パイプ状に丸めたときの搬送ベルト3の両側部3a、3bに設けられたすべての永久磁石6の上面がN極、下面がS極となるようにしてある。しかし、この極性をすべて逆にしたり、搬送ベルト3の長手方向に沿って、1個ごとに極性が逆になるようにしてもよい。また、永久磁石6、7のうち、いずれか一方を、鉄板等の磁性体により形成してもよい。
また、図1および図3に示すように、両永久磁石6、7は、搬送ベルト3を丸めたときに、搬送ベルト3の重合部において互いに重なり合うような配置としてあるが、例えば、搬送ベルト3の長手方向に互いに位置をずらして、交互に並べたり、またはさらに、丸めた搬送ベルト3の円周方向にも位置をずらして、千鳥状の配置としたりしてもよい。
【0021】
また、後部プーリ2寄りには、搬送ベルト3に接して搬送ベルト3を丸めるように案内支持する丸めローラ(ガイドローラ)20と、丸めローラ20を支持するローラ支持装置(第1の機体)21が配設されている。ローラ支持装置(第1の機体)21には、丸めローラ20の位置を制御する丸めローラ駆動装置(アクチュエータ)が備えられており、丸めローラ20と丸めローラ駆動装置(アクチュエータ)とで第1の矯正手段を構成している。
また、搬送ベルト3の往路側の前部プーリ1と後部プーリ2との中間位置には、搬送ベルト3に接して搬送ベルト3を循環走行可能に案内支持する円形保持ローラ(ガイドローラ)18と、円形保持ローラ18を支持するローラ支持装置(第2の機体)19が配設されている。ローラ支持装置(第2の機体)19には、円形保持ローラ18の位置を制御する円形保持ローラ駆動装置(アクチュエータ)が備えられており、円形保持ローラ18と円形保持ローラ駆動装置(アクチュエータ)とで第2の矯正手段を構成している。
【0022】
また、パイプ状に丸められた搬送ベルト3が通過する領域の適所に設けた固定体(図示略)には、永久磁石(ベルト側送信手段)6、7が通過するときの磁力の強さを検出する複数の磁気センサ(機体側受信手段)8が、搬送ベルト3に近設して、かつ搬送ベルト3を囲む円周方向に並べて設けられている。磁気センサ8としては、磁力あるいはその変化を測定することが可能なセンサが用いられる。例えば、磁力を測定するホールセンサやMIセンサ、磁力の変化を測定するループコイルが用いられる。
また、磁気センサ8によって検出された複数の磁石6、7の磁界の信号を収集するデータ収集装置9と、データ収集装置9に接続されて、搬送ベルト3の捩れ角度を算出する制御装置(制御手段)10を備えている。
【0023】
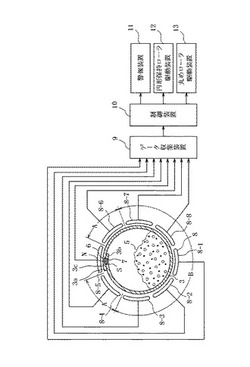
図3は、磁気センサが搬送ベルトを囲む円周方向に並べて設けられた位置における搬送ベルトの断面図と、搬送ベルトの捩れの状況を判断する部分のブロック図である。図3では、磁気センサ8は、8個のループコイル8−1〜8−8としてある。また、パイプ状に丸められた搬送ベルト3が通過する箇所における搬送ベルト3の外周の領域を、搬送ベルト3の両側部3a、3bの重合部3cが捩れて移動する際の許容範囲と、警報Aを発信する範囲と、警報Bを発信する範囲とに区分し、許容範囲にはループコイル8−5が、警報Aを発信する範囲にはループコイル8−4、8−6が、また警報Bを発信する範囲には、それ以外の5個の8−1〜8−3、8−7、8−8が配設されている。
【0024】
各ループコイル8−1〜8−8(以下、特定のものを指すとき以外は、磁気センサ8という)は、データ収集装置9にそれぞれ接続されており、データ収集装置9は制御装置10に接続されている。また、制御装置10には、警報装置11、円形保持ローラ駆動装置12、丸めローラ駆動装置13が接続されている。
【0025】
搬送ベルト3に埋設された永久磁石6、7が磁気センサ8の近傍を通過すると、複数の磁気センサ8が磁石の磁界を検知し、検知された信号をデータ収集装置9が収集する。制御装置10は、磁気センサ8により検出した磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出し、捩れ角度に応じて警報装置11に警報信号を出力する。制御装置10は、捩れ角度が、ループコイル8−4、8−6が配設されている範囲である場合は、警報Aを発信する。制御装置10は、さらに捩れが大きく、捩れ角度が、ループコイル8−1〜8−3、8−7、8−8が配設されている範囲である場合は、警報Bを発信し、ローラ支持装置(第2の機体)19に備える円形保持ローラ駆動装置12に制御信号を出力する。円形保持ローラ駆動装置12は、円形保持ローラ18の位置を制御し、回転軸の角度を変えて搬送ベルトの捩れを矯正する。円形保持ローラ駆動装置12により、搬送ベルトの捩れを矯正しても、捩れ角度が、ループコイル8−1〜8−3、8−7、8−8が配設されている範囲である場合は、さらに、制御装置10は、ローラ支持装置(第1の機体)21に備える丸めローラ駆動装置13に制御信号を出力する。丸めローラ駆動装置13は、丸めローラ20の位置を制御し、丸めローラ20が搬送ベルトに接する圧力を変えて搬送ベルトの捩れを矯正する。
【0026】
警報AやBを発信する手段としては、パトランプ(警告灯)やサイレンを使ってもよいし、制御装置10に、監視室等に設置された監視装置を接続して、監視装置から警報を発信するようにしてもよい。
【0027】
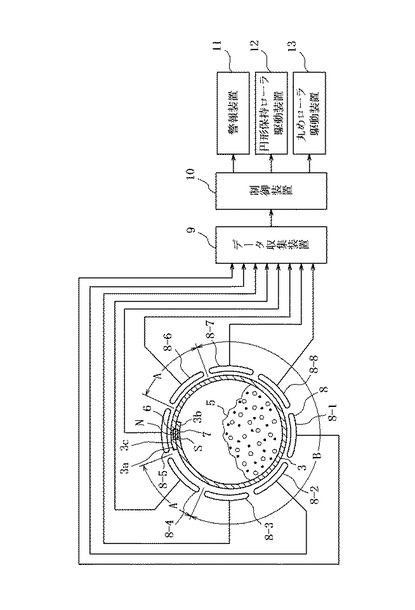
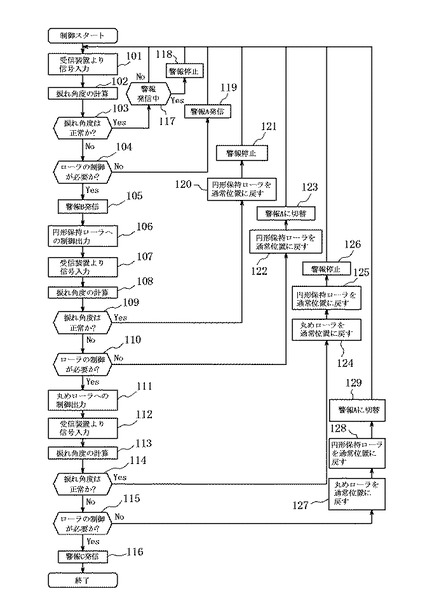
図4は、制御装置が、警報装置、円形保持ローラ駆動装置および丸めローラ駆動装置を制御する動作を説明するフローチャートである。
制御装置10は、受信手段である磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ101)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ102)。
【0028】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ103)。捩れ角度が正常である場合(Yesの場合)、即ち、図3では、ループコイル8−5からの信号が最も大きい場合は、警報を発信中であるか否かを判定する(ステップ117)。警報発信中でなければステップ101に戻り、警報発信中であれば警報を停止してステップ101に戻り(ステップ118)、そのまま継続して磁気センサ8によって検出された磁石6、7の磁界の信号をデータ収集装置8から取得する。
【0029】
ステップ103おいて、捩れ角度が異常である場合(Noの場合)、即ち、図3では、ループコイル8−5以外からの信号が最も大きい場合は、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ104)。ローラの制御が必要でない場合(Noの場合)、即ち、図3では、ループコイル8−4または8−6からの信号が最も大きい場合は、例えば、注意等を表す警報Aを発信し(ステップ119)、ステップ101に戻る。ローラの制御が必要な場合(Yesの場合)、即ち、図3では、ループコイル8−1〜8−3、8−7、8−8のいずれかからの信号が最も大きい場合は、例えば、異常等を表す警報Bを発信し(ステップ105)、円形保持ローラ駆動装置12へ制御信号を出力して搬送ベルトの捩れを矯正する(ステップ106)。
【0030】
さらに、磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ107)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ108)。
【0031】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ109)。捩れ角度が正常であれば(Yesの場合)、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ120)、警報Bを停止して(ステップ121)ステップ101へ戻る。
【0032】
ステップ109おいて、捩れ角度が異常であれば(Noの場合)、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ104)。ローラの制御が必要でない場合(Noの場合)は、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ122)、警報Aに切り替えて(ステップ123)ステップ101へ戻る。ローラの制御が必要な場合(Yesの場合)は、丸めローラ駆動装置13へ制御信号を出力して搬送ベルトの捩れを矯正する(ステップ111)。
【0033】
さらに、磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ112)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ113)。
【0034】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ114)。捩れ角度が正常であれば(Yesの場合)、丸めローラを通常位置に戻すように丸めローラ駆動装置13へ制御信号を出力し(ステップ124)、次に、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ125)、警報Bを停止して(ステップ126)ステップ101へ戻る。
【0035】
ステップ114おいて、捩れ角度が異常であれば(Noの場合)、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ115)。ローラの制御が必要でない場合(Noの場合)は、丸めローラを通常位置に戻すように丸めローラ駆動装置13へ制御信号を出力し(ステップ127)、次に、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ128)、警報Aに切り替えて(ステップ129)ステップ101へ戻る。ローラの制御が必要な場合(Yesの場合)は、警報Cを発信し、および/または搬送ベルトを停止する(ステップ116)。
【0036】
上述した実施の形態では、搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持するローラ支持装置に、搬送ベルトの捩れを矯正する円形保持ローラ駆動装置を備え、搬送ベルトを丸めるように案内支持する丸めローラを支持するローラ支持装置に、搬送ベルトの捩れを矯正する丸めローラ駆動装置を備えて、円形保持ローラ駆動装置と丸めローラ駆動装置で搬送ベルトの捩れを矯正するので、搬送ベルトに捩れが生じたときに、より効果的に搬送ベルトの捩れを矯正することができることができる。
【0037】
なお、上述した実施の形態では、搬送ベルト3に接して単独で配設された円形保持ローラ18を円形保持ローラ駆動装置で制御して搬送ベルトの捩れを矯正したが、図2に示す案内枠14の窓穴14cの周縁にほぼ環状に配設された複数本(6本)の円形保持ローラ16のいずれか1つを円形保持ローラ駆動装置で制御して搬送ベルトの捩れを矯正するようしても良い。
また、上述した実施の形態では、警報装置を備えて、警報A、B、Cを発信するようにしたが、警報は必須ではなく、警報装置を省略して警報を発信しないようにしても良い。
【図面の簡単な説明】
【0038】
【図1】搬送ベルトの一部が筒状となって被搬送物を包み込んで搬送するパイプコンベヤベルトの斜視図である。
【図2】複数の円形保持ローラを配設してなる案内枠を示す図である。
【図3】磁気センサが搬送ベルトを囲む円周方向に並べて設けられた位置におけるパイプコンベヤベルトの断面図と、搬送ベルトの捩れの状況を判断する部分のブロック図である。
【図4】制御装置が、警報装置、円形保持ローラ駆動装置および丸めローラ駆動装置を制御する動作を説明するフローチャートである。
【符号の説明】
【0039】
1 前部プーリ
2 後部プーリ
3 搬送ベルト
3a,3b 側部
3c 重合部
4 ホッパ
5 被搬送物
6,7 永久磁石
8 磁気センサ
8−1〜8−8 ループコイル
9 データ収集装置
10 制御装置
11 警報装置
12 円形保持ローラ駆動装置
13 丸めローラ駆動装置
14 案内枠
14a 上室
14b 下室
14c 窓穴
16,18 円形保持ローラ
19,21 ローラ支持装置
20 丸めローラ
【技術分野】
【0001】
本発明は、循環走行する無端帯状の搬送ベルトの一部分をパイプ状に丸め、その内部に被搬送物を包み込んで搬送するようにしたパイプコンベヤベルトに関する。
【背景技術】
【0002】
従来、循環走行する無端帯状の搬送ベルトの一部分をパイプ状に丸め、その内部に粉体や粒状体等の被運搬物を包み込んで搬送するようにしたパイプコンベヤベルトが広く知られている。このパイプコンベヤベルトでは、パイプ状に丸められた搬送ベルトを、ほぼ環状に配置したガイドローラ(円形保持ローラ)内を通過させて案内支持するが、このガイドローラは、一般に金属製であることから表面が平滑であるため、パイプコンベヤベルトが露天設置機体の場合には、雨天時にスリップが発生し易く、また、粉体や粒状体等の被運搬物が付着して、部分的に摩擦力が変化して、搬送ベルトに捩れを生ずることがある。
【0003】
この搬送ベルトの捩れを修正するものとして、特許文献1には、支持ブラケットに長穴を形成し、ガイドローラを支持するローラブラケットと支持ブラケットとを長穴に挿通させた締結部材を介して回転可能に連結し、ローラブラケットに、ローリング調整用ハンドルを設けて、手動式で搬送ベルトのローリング(捩れ)を矯正するローリング調整装置が提案されている。
【0004】
また、特許文献2には、搬送ベルトに埋め込まれた永久磁石の磁気強度をベルトの周り全周に設置した磁気センサを用いて測定し、パイプ状の搬送ベルトの捩れおよび潰れの判別有無を判断できるようにしたパイプコンベヤベルトが開示されている。
【特許文献1】特開2001−139115号公報
【特許文献2】特開2007−91356号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載されているものにおいては、搬送ベルトの捩れ矯正を手動で行っており、自動で行うことができないという問題がある。
また、特許文献2には、パイプ状に丸められた搬送ベルトの捩れおよび潰れの有無を自動で検出するだけであり、搬送ベルトの捩れを調整する手段については開示がされていない。
【0006】
本発明は、このような問題点に鑑みてなされたものであり、本発明の目的は、搬送ベルトに捩れが生じたときに搬送ベルトの捩れを自動で矯正することができるパイプコンベヤベルトを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備えると共に、前記第1の矯正手段を制御する制御手段を設けたことを特徴とする。
【0008】
また、本発明は、無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備え、前記搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持する第2の機体に、前記搬送ベルトの捩れを矯正する第2の矯正手段を備えると共に、前記第1および第2の矯正手段を制御する制御手段を設けたことを特徴とする。
【0009】
また、本発明は、前記搬送ベルトの捩れを検出するモニタリングシステムを更に備ることが好ましい。
【0010】
前記モニタリングシステムは、ベルト側送信手段と、前記ベルト側送信手段の位置を検出する機体側受信手段とで構成され、前記機体側受信手段の検出値に基づいて捩れを検出することが好ましく、前記ベルト側送信手段は、ベルト内に埋設された永久磁石であり、前記機体側受信手段は磁気センサであることが好ましい。
【0011】
また、前記第1および第2の矯正手段は、前記モニタリングシステムの検出値を基に、前記制御手段で自動制御されることが好ましく、また、前記第1の矯正手段は、丸めローラと、丸めローラの位置を制御するアクチュエータとで構成され、前記第2の矯正手段は、円形保持ローラと、円形保持ローラの位置を制御するアクチュエータとで構成されることが好ましい。
【0012】
また、本発明は、無端帯状の搬送ベルトを循環走行可能に案内支持する円形保持ローラと、前記搬送ベルトを丸めるように案内支持する丸めローラとを備え、前記搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法であって、前記搬送ベルトの捩れを検出し、搬送ベルトの捩れの矯正が必要な場合は、前記円形保持ローラにより前記搬送ベルトの捩れを矯正し、前記円形保持ローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、前記丸めローラにより前記搬送ベルトの捩れを矯正することを特徴とする。
【0013】
本発明は、前記丸めローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、警報を発信し、および/または前記搬送ベルトを停止することが好ましい。
【発明の効果】
【0014】
本発明によれば、搬送ベルトを案内支持するガイドローラを支持する機体に、搬送ベルトの捩れを矯正する矯正手段を備えるようにしたので、搬送ベルトに捩れが生じたときに搬送ベルトの捩れを矯正することができることができる。
【0015】
また、本発明によれば、搬送ベルトを丸めるように案内支持するガイドローラを支持する機体と、搬送ベルトを循環走行可能に案内支持するガイドローラを支持する機体に、搬送ベルトの捩れを矯正する矯正手段を備えるようにすることにより、搬送ベルトに捩れが生じたときに、より効果的に搬送ベルトの捩れを矯正することができることができる。
【0016】
また、本発明によれば、搬送ベルトに捩れが生じたときに、搬送ベルトの捩れを自動で矯正することができる。
【発明を実施するための最良の形態】
【0017】
本発明の実施の形態について図面を参照して説明する。図1は、搬送ベルトの一部がパイプ状となって被搬送物を包み込んで搬送するパイプコンベヤベルトの斜視図である。図1に示すパイプコンベヤベルトは、前部プーリ1と後部プーリ2とに無端帯状の搬送ベルト3を掛け回し、前部プーリ1と後部プーリ2とのいずれか一方を、モータ等の駆動手段により回転させることによって、搬送ベルト3を循環走行させ、搬送ベルト3の往路側である往路ベルトと、復路側である復路ベルトの中間部を、複数の円形保持ローラをほぼ環状または樋状に配設してなる案内枠(図示略)の内部を通過させることにより、搬送ベルト3を、その一方の側部3aの表面(搬送面)が、他方の側部3bの裏面に接触するようにして、両測部3a、3bが互いに重合するパイプ状に丸め、その中に、後部プーリ2寄りの上方に配設したホッパ4から供給された被搬送物5を、包み込んで搬送するようになっている。
【0018】
図2は、複数の円形保持ローラを配設してなる案内枠を示す図である。前部プーリ1と後部プーリ2との間には、方形枠状をなす複数の案内枠が、搬送ベルト3の進行方向にほぼ一定間隔を持って配設されている。図2に示すように、案内枠14は、上室14aと下室14bに分かれ、その上室14aの中央に形成された窓穴14cを、搬送ベルト3の往路側である往路ベルト3aが、窓穴14cの周縁にほぼ環状に配設された複数の円形保持ローラ16によって案内支持されて通過するようになっており、また、下室14bの中央に形成された窓穴14cを、搬送ベルト3の復路側である復路ベルト3bが、窓穴14cの周縁にほぼ環状に配設された複数本(6本)の円形保持ローラ16によって案内支持されて通過するようになっている。
【0019】
図1に示すパイプコンベヤベルトでは、パイプ状に丸められたときに互いに重合する搬送ベルト3の一方の側部3aの裏面と、他方の側部3bの表面との対向面には、それぞれが磁性吸着体をなす複数の永久磁石6、7が、搬送ベルト3の長手方向に適宜の間隔をもって、また互いの対向面の極性が異なるようにして埋設されている。
【0020】
また、図3に示すように、パイプ状に丸めたときの搬送ベルト3の両側部3a、3bに設けられたすべての永久磁石6の上面がN極、下面がS極となるようにしてある。しかし、この極性をすべて逆にしたり、搬送ベルト3の長手方向に沿って、1個ごとに極性が逆になるようにしてもよい。また、永久磁石6、7のうち、いずれか一方を、鉄板等の磁性体により形成してもよい。
また、図1および図3に示すように、両永久磁石6、7は、搬送ベルト3を丸めたときに、搬送ベルト3の重合部において互いに重なり合うような配置としてあるが、例えば、搬送ベルト3の長手方向に互いに位置をずらして、交互に並べたり、またはさらに、丸めた搬送ベルト3の円周方向にも位置をずらして、千鳥状の配置としたりしてもよい。
【0021】
また、後部プーリ2寄りには、搬送ベルト3に接して搬送ベルト3を丸めるように案内支持する丸めローラ(ガイドローラ)20と、丸めローラ20を支持するローラ支持装置(第1の機体)21が配設されている。ローラ支持装置(第1の機体)21には、丸めローラ20の位置を制御する丸めローラ駆動装置(アクチュエータ)が備えられており、丸めローラ20と丸めローラ駆動装置(アクチュエータ)とで第1の矯正手段を構成している。
また、搬送ベルト3の往路側の前部プーリ1と後部プーリ2との中間位置には、搬送ベルト3に接して搬送ベルト3を循環走行可能に案内支持する円形保持ローラ(ガイドローラ)18と、円形保持ローラ18を支持するローラ支持装置(第2の機体)19が配設されている。ローラ支持装置(第2の機体)19には、円形保持ローラ18の位置を制御する円形保持ローラ駆動装置(アクチュエータ)が備えられており、円形保持ローラ18と円形保持ローラ駆動装置(アクチュエータ)とで第2の矯正手段を構成している。
【0022】
また、パイプ状に丸められた搬送ベルト3が通過する領域の適所に設けた固定体(図示略)には、永久磁石(ベルト側送信手段)6、7が通過するときの磁力の強さを検出する複数の磁気センサ(機体側受信手段)8が、搬送ベルト3に近設して、かつ搬送ベルト3を囲む円周方向に並べて設けられている。磁気センサ8としては、磁力あるいはその変化を測定することが可能なセンサが用いられる。例えば、磁力を測定するホールセンサやMIセンサ、磁力の変化を測定するループコイルが用いられる。
また、磁気センサ8によって検出された複数の磁石6、7の磁界の信号を収集するデータ収集装置9と、データ収集装置9に接続されて、搬送ベルト3の捩れ角度を算出する制御装置(制御手段)10を備えている。
【0023】
図3は、磁気センサが搬送ベルトを囲む円周方向に並べて設けられた位置における搬送ベルトの断面図と、搬送ベルトの捩れの状況を判断する部分のブロック図である。図3では、磁気センサ8は、8個のループコイル8−1〜8−8としてある。また、パイプ状に丸められた搬送ベルト3が通過する箇所における搬送ベルト3の外周の領域を、搬送ベルト3の両側部3a、3bの重合部3cが捩れて移動する際の許容範囲と、警報Aを発信する範囲と、警報Bを発信する範囲とに区分し、許容範囲にはループコイル8−5が、警報Aを発信する範囲にはループコイル8−4、8−6が、また警報Bを発信する範囲には、それ以外の5個の8−1〜8−3、8−7、8−8が配設されている。
【0024】
各ループコイル8−1〜8−8(以下、特定のものを指すとき以外は、磁気センサ8という)は、データ収集装置9にそれぞれ接続されており、データ収集装置9は制御装置10に接続されている。また、制御装置10には、警報装置11、円形保持ローラ駆動装置12、丸めローラ駆動装置13が接続されている。
【0025】
搬送ベルト3に埋設された永久磁石6、7が磁気センサ8の近傍を通過すると、複数の磁気センサ8が磁石の磁界を検知し、検知された信号をデータ収集装置9が収集する。制御装置10は、磁気センサ8により検出した磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出し、捩れ角度に応じて警報装置11に警報信号を出力する。制御装置10は、捩れ角度が、ループコイル8−4、8−6が配設されている範囲である場合は、警報Aを発信する。制御装置10は、さらに捩れが大きく、捩れ角度が、ループコイル8−1〜8−3、8−7、8−8が配設されている範囲である場合は、警報Bを発信し、ローラ支持装置(第2の機体)19に備える円形保持ローラ駆動装置12に制御信号を出力する。円形保持ローラ駆動装置12は、円形保持ローラ18の位置を制御し、回転軸の角度を変えて搬送ベルトの捩れを矯正する。円形保持ローラ駆動装置12により、搬送ベルトの捩れを矯正しても、捩れ角度が、ループコイル8−1〜8−3、8−7、8−8が配設されている範囲である場合は、さらに、制御装置10は、ローラ支持装置(第1の機体)21に備える丸めローラ駆動装置13に制御信号を出力する。丸めローラ駆動装置13は、丸めローラ20の位置を制御し、丸めローラ20が搬送ベルトに接する圧力を変えて搬送ベルトの捩れを矯正する。
【0026】
警報AやBを発信する手段としては、パトランプ(警告灯)やサイレンを使ってもよいし、制御装置10に、監視室等に設置された監視装置を接続して、監視装置から警報を発信するようにしてもよい。
【0027】
図4は、制御装置が、警報装置、円形保持ローラ駆動装置および丸めローラ駆動装置を制御する動作を説明するフローチャートである。
制御装置10は、受信手段である磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ101)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ102)。
【0028】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ103)。捩れ角度が正常である場合(Yesの場合)、即ち、図3では、ループコイル8−5からの信号が最も大きい場合は、警報を発信中であるか否かを判定する(ステップ117)。警報発信中でなければステップ101に戻り、警報発信中であれば警報を停止してステップ101に戻り(ステップ118)、そのまま継続して磁気センサ8によって検出された磁石6、7の磁界の信号をデータ収集装置8から取得する。
【0029】
ステップ103おいて、捩れ角度が異常である場合(Noの場合)、即ち、図3では、ループコイル8−5以外からの信号が最も大きい場合は、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ104)。ローラの制御が必要でない場合(Noの場合)、即ち、図3では、ループコイル8−4または8−6からの信号が最も大きい場合は、例えば、注意等を表す警報Aを発信し(ステップ119)、ステップ101に戻る。ローラの制御が必要な場合(Yesの場合)、即ち、図3では、ループコイル8−1〜8−3、8−7、8−8のいずれかからの信号が最も大きい場合は、例えば、異常等を表す警報Bを発信し(ステップ105)、円形保持ローラ駆動装置12へ制御信号を出力して搬送ベルトの捩れを矯正する(ステップ106)。
【0030】
さらに、磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ107)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ108)。
【0031】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ109)。捩れ角度が正常であれば(Yesの場合)、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ120)、警報Bを停止して(ステップ121)ステップ101へ戻る。
【0032】
ステップ109おいて、捩れ角度が異常であれば(Noの場合)、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ104)。ローラの制御が必要でない場合(Noの場合)は、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ122)、警報Aに切り替えて(ステップ123)ステップ101へ戻る。ローラの制御が必要な場合(Yesの場合)は、丸めローラ駆動装置13へ制御信号を出力して搬送ベルトの捩れを矯正する(ステップ111)。
【0033】
さらに、磁気センサ8によって検出された複数の磁石6、7の磁界の信号をデータ収集装置8から取得すると(ステップ112)、検出された磁界の強さを比較して、最も大きな磁界を検出した磁気センサ8の位置により、搬送ベルト3の捩れ角度を算出する(ステップ113)。
【0034】
次に、算出された捩れ角度が、正常であるか否かを判定する(ステップ114)。捩れ角度が正常であれば(Yesの場合)、丸めローラを通常位置に戻すように丸めローラ駆動装置13へ制御信号を出力し(ステップ124)、次に、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ125)、警報Bを停止して(ステップ126)ステップ101へ戻る。
【0035】
ステップ114おいて、捩れ角度が異常であれば(Noの場合)、次に、捩れ角度が、ローラの制御が必要な範囲にあるか否かを判定する(ステップ115)。ローラの制御が必要でない場合(Noの場合)は、丸めローラを通常位置に戻すように丸めローラ駆動装置13へ制御信号を出力し(ステップ127)、次に、円形保持ローラを通常位置に戻すように円形保持ローラ駆動装置12へ制御信号を出力し(ステップ128)、警報Aに切り替えて(ステップ129)ステップ101へ戻る。ローラの制御が必要な場合(Yesの場合)は、警報Cを発信し、および/または搬送ベルトを停止する(ステップ116)。
【0036】
上述した実施の形態では、搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持するローラ支持装置に、搬送ベルトの捩れを矯正する円形保持ローラ駆動装置を備え、搬送ベルトを丸めるように案内支持する丸めローラを支持するローラ支持装置に、搬送ベルトの捩れを矯正する丸めローラ駆動装置を備えて、円形保持ローラ駆動装置と丸めローラ駆動装置で搬送ベルトの捩れを矯正するので、搬送ベルトに捩れが生じたときに、より効果的に搬送ベルトの捩れを矯正することができることができる。
【0037】
なお、上述した実施の形態では、搬送ベルト3に接して単独で配設された円形保持ローラ18を円形保持ローラ駆動装置で制御して搬送ベルトの捩れを矯正したが、図2に示す案内枠14の窓穴14cの周縁にほぼ環状に配設された複数本(6本)の円形保持ローラ16のいずれか1つを円形保持ローラ駆動装置で制御して搬送ベルトの捩れを矯正するようしても良い。
また、上述した実施の形態では、警報装置を備えて、警報A、B、Cを発信するようにしたが、警報は必須ではなく、警報装置を省略して警報を発信しないようにしても良い。
【図面の簡単な説明】
【0038】
【図1】搬送ベルトの一部が筒状となって被搬送物を包み込んで搬送するパイプコンベヤベルトの斜視図である。
【図2】複数の円形保持ローラを配設してなる案内枠を示す図である。
【図3】磁気センサが搬送ベルトを囲む円周方向に並べて設けられた位置におけるパイプコンベヤベルトの断面図と、搬送ベルトの捩れの状況を判断する部分のブロック図である。
【図4】制御装置が、警報装置、円形保持ローラ駆動装置および丸めローラ駆動装置を制御する動作を説明するフローチャートである。
【符号の説明】
【0039】
1 前部プーリ
2 後部プーリ
3 搬送ベルト
3a,3b 側部
3c 重合部
4 ホッパ
5 被搬送物
6,7 永久磁石
8 磁気センサ
8−1〜8−8 ループコイル
9 データ収集装置
10 制御装置
11 警報装置
12 円形保持ローラ駆動装置
13 丸めローラ駆動装置
14 案内枠
14a 上室
14b 下室
14c 窓穴
16,18 円形保持ローラ
19,21 ローラ支持装置
20 丸めローラ
【特許請求の範囲】
【請求項1】
無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、
前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備えると共に、前記第1の矯正手段を制御する制御手段を設けたことを特徴とするパイプコンベヤベルト。
【請求項2】
無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、
前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備え、
前記搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持する第2の機体に、前記搬送ベルトの捩れを矯正する第2の矯正手段を備えると共に、
前記第1および第2の矯正手段を制御する制御手段を設けたことを特徴とするパイプコンベヤベルト。
【請求項3】
前記搬送ベルトの捩れを検出するモニタリングシステムを更に備ることを特徴とする請求項1または2に記載のパイプコンベヤベルト。
【請求項4】
前記モニタリングシステムは、ベルト側送信手段と、前記ベルト側送信手段の位置を検出する機体側受信手段とで構成され、前記機体側受信手段の検出値に基づいて捩れを検出することを特徴とする請求項3に記載のパイプコンベヤベルト。
【請求項5】
前記ベルト側送信手段は、ベルト内に埋設された永久磁石であり、前記機体側受信手段は磁気センサであることを特徴とする請求項4に記載のパイプコンベヤベルト。
【請求項6】
前記第1および第2の矯正手段は、前記モニタリングシステムの検出値を基に、前記制御手段で自動制御されることを特徴とする請求項3〜5のいずれかに記載のパイプコンベヤベルト。
【請求項7】
前記第1の矯正手段は、丸めローラと、丸めローラの位置を制御するアクチュエータとで構成され、前記第2の矯正手段は、円形保持ローラと、円形保持ローラの位置を制御するアクチュエータとで構成されることを特徴とする請求項1〜6のいずれかに記載のパイプコンベヤベルト。
【請求項8】
無端帯状の搬送ベルトを循環走行可能に案内支持する円形保持ローラと、前記搬送ベルトを丸めるように案内支持する丸めローラとを備え、前記搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法であって、
前記搬送ベルトの捩れを検出し、搬送ベルトの捩れの矯正が必要な場合は、前記円形保持ローラにより前記搬送ベルトの捩れを矯正し、前記円形保持ローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、前記丸めローラにより前記搬送ベルトの捩れを矯正することを特徴とするパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法。
【請求項9】
前記丸めローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、警報を発信し、および/または前記搬送ベルトを停止することを特徴とする請求項8に記載のパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法。
【請求項1】
無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、
前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備えると共に、前記第1の矯正手段を制御する制御手段を設けたことを特徴とするパイプコンベヤベルト。
【請求項2】
無端帯状の搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおいて、
前記搬送ベルトを丸めるように案内支持する丸めローラを支持する第1の機体に、前記搬送ベルトの捩れを矯正する第1の矯正手段を備え、
前記搬送ベルトを循環走行可能に案内支持する円形保持ローラを支持する第2の機体に、前記搬送ベルトの捩れを矯正する第2の矯正手段を備えると共に、
前記第1および第2の矯正手段を制御する制御手段を設けたことを特徴とするパイプコンベヤベルト。
【請求項3】
前記搬送ベルトの捩れを検出するモニタリングシステムを更に備ることを特徴とする請求項1または2に記載のパイプコンベヤベルト。
【請求項4】
前記モニタリングシステムは、ベルト側送信手段と、前記ベルト側送信手段の位置を検出する機体側受信手段とで構成され、前記機体側受信手段の検出値に基づいて捩れを検出することを特徴とする請求項3に記載のパイプコンベヤベルト。
【請求項5】
前記ベルト側送信手段は、ベルト内に埋設された永久磁石であり、前記機体側受信手段は磁気センサであることを特徴とする請求項4に記載のパイプコンベヤベルト。
【請求項6】
前記第1および第2の矯正手段は、前記モニタリングシステムの検出値を基に、前記制御手段で自動制御されることを特徴とする請求項3〜5のいずれかに記載のパイプコンベヤベルト。
【請求項7】
前記第1の矯正手段は、丸めローラと、丸めローラの位置を制御するアクチュエータとで構成され、前記第2の矯正手段は、円形保持ローラと、円形保持ローラの位置を制御するアクチュエータとで構成されることを特徴とする請求項1〜6のいずれかに記載のパイプコンベヤベルト。
【請求項8】
無端帯状の搬送ベルトを循環走行可能に案内支持する円形保持ローラと、前記搬送ベルトを丸めるように案内支持する丸めローラとを備え、前記搬送ベルトの一部をパイプ状に丸めて搬送物を包み込むように搬送するパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法であって、
前記搬送ベルトの捩れを検出し、搬送ベルトの捩れの矯正が必要な場合は、前記円形保持ローラにより前記搬送ベルトの捩れを矯正し、前記円形保持ローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、前記丸めローラにより前記搬送ベルトの捩れを矯正することを特徴とするパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法。
【請求項9】
前記丸めローラにより前記搬送ベルトの捩れを矯正した後に、さらに搬送ベルトの捩れの矯正が必要な場合は、警報を発信し、および/または前記搬送ベルトを停止することを特徴とする請求項8に記載のパイプコンベヤベルトにおける搬送ベルトの捩れ矯正方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−132501(P2009−132501A)
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2007−310101(P2007−310101)
【出願日】平成19年11月30日(2007.11.30)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願日】平成19年11月30日(2007.11.30)
【出願人】(000005278)株式会社ブリヂストン (11,469)
【Fターム(参考)】
[ Back to top ]