
パターンマッチング方法、及びパターンマッチングを行うためのコンピュータプログラム
【課題】本発明の目的は、設計データ内の凹凸情報を特定するのに好適な方法,プログラム及び装置の提供に係り、一例として同じような部分が羅列するようなパターンであっても、設計データと、画像形成装置等で取得された画像との間のパターンマッチングを高精度に行い得る方法,プログラム及び装置の提供にある。
【解決手段】上記目的を達成するために、設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法、及びそのためのプログラムを提供する。
【解決手段】上記目的を達成するために、設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法、及びそのためのプログラムを提供する。
【発明の詳細な説明】
【背景技術】
【0001】
例えば半導体ウェハを測定,検査する走査電子顕微鏡(Scanning Electron Microscope:SEM)等では、パターンマッチング技術を用いて、所望の測定個所にその視野(Fieldof View :FOV)や走査個所の位置合せを行うことが行われている。特許文献1には、そのようなパターンマッチング法の一例が説明されている。
【0002】
パターンマッチングは、テンプレートと呼ばれる予め登録されたパターン画像と、SEM等で実際に取得された画像との間の一致度を測定することによって行われる。特許文献2には、パターンマッチング用のテンプレートを、半導体素子等の設計データに基づいて形成する例が説明されている。設計データに基づいてテンプレートを形成できれば、テンプレートを形成するためにわざわざSEM画像を取得するというような手間がなくなる等の利点がある。
【0003】
更に特許文献3,4には、ラインアンドスペースのように、同じ形状が単調に繰り返されるパターンの凹凸状態を把握することによって、凹部と凸部を取り違えることによるパターンマッチングの失敗を抑制する技術が説明されている。
【0004】
【特許文献1】特開2001−243906号公報(対応米国特許USP 6,627,888)
【特許文献2】特開2002−328015号公報(対応米国特許US2003/ 0173516)
【特許文献3】特開2003−90719号公報(対応米国特許USP 6,872,943)
【特許文献4】特開2004−251674号公報(対応米国特許US2004/ 0222375)
【発明の開示】
【発明が解決しようとする課題】
【0005】
設計データに基づいて形成されるテンプレートは、パターンの輪郭を定義する線分のみで表現される線図であるため、ラインアンドスペースのような同じ形状が単調に繰り返されるパターンの場合、パターン部と、非パターン部の判断が難しいという問題がある。
【0006】
特に、ラインアンドスペースパターンの場合、高倍率となり、ラインパターンの端部がFOVの外に位置することになると、2本の線分で定義される領域が、ライン部(凸部)或いはスペース部(凹部)のいずれに相当するのかを判断することが困難になるという問題がある。特許文献3,4に開示の技術は、SEM画像内での凹凸判定を行うためのものであり、設計データ内の凹凸判定を志向するものではなかった。
【0007】
本発明の目的は、設計データ内の凹凸情報を特定するのに好適な方法,プログラム及び装置の提供に係り、一例として同じような部分が羅列するようなパターンであっても、設計データと、画像形成装置等で取得された画像との間のパターンマッチングを高精度に行い得る方法,プログラム及び装置の提供にある。
【課題を解決するための手段】
【0008】
本発明によれば、上記目的を達成するために、設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うパターンマッチング方法、当該方法を実現するためのプログラム、及び装置において、前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法,プログラム、及び装置を提供するものである。
【発明の効果】
【0009】
上記構成によれば、単なる線図ではなく、設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報に基づいて、マッチングを行うことができるので、パターン部と非パターン部を取り違えることによるパターンマッチングの失敗を抑制することが可能となる。
【発明を実施するための最良の形態】
【0010】
半導体検査装置の一種である測長走査電子顕微鏡の検査対象は半導体チップ製造の際に半導体ウェーハ上に作られたパターンである。測長走査電子顕微鏡を用いて半導体チップの構造を解析する際には、検査を自動で連続に行う為、画像処理により位置照合を行う必要がある。その為に検査を自動で連続に行う前に撮影条件や、画像処理による位置照合の条件,検査項目等の検査条件を設定する必要がある。
【0011】
画像処理による位置照合はパターンマッチングと呼ばれる。パターンマッチングには自動で検査位置を探索する為に、検査対象とは別に特徴的な形状のパターンを予め登録する必要がある。この登録パターンは、例えば、測長走査電子顕微鏡で検査対象を撮影した画像や、撮影された画像から計算された輪郭線情報,CADデータ等の設計パターンの画像,設計パターンの輪郭線情報などが使用されている。この登録パターンを用い、検査を行う毎に撮影される画像である被検出パターンに対してパターンマッチングを行っている。
【0012】
検査パターンとしてCADデータ等の設計パターンの画像を用いることは、検査パターンの登録を容易にするだけでなく、検査パターンとして登録する為に検査対象を撮影する必要がないため、測長走査電子顕微鏡を占有する時間を短縮し、測長走査電子顕微鏡の稼働率を向上させる利点があるが、設計データと半導体ウェーハを撮影した電子顕微鏡撮影画像を被検出パターンとするパターンマッチングでは、半導体ウェーハ上のパターンが形状変化する問題により、パターンマッチングが失敗することがある。
【0013】
特に、線(ライン)のみで構成されるパターンのような特徴的な形状が無く、また単調に繰り返されるパターンにおけるパターンマッチングは、困難である。
【0014】
CADデータ等の設計データと電子顕微鏡撮影画像に関するパターンマッチングにおいて、線(ライン)のみで構成されるパターンのような特徴的な形状が無く、単調に繰り返されるパターン、またそのようなパターンにおいて、登録パターンと検査対象の形状が変化した場合、従来のマッチング手法では、マッチング位置を特定する情報が足りず、パターンマッチングに失敗することがあるという問題があった。
【0015】
以下の説明は、上記パターンにおいて、CADデータ等の設計データと電子顕微鏡撮影画像のパターン中心位置を合わせるパターンマッチングを可能とすることに関する。
【0016】
以下に設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、画像上のパターンとのパターンマッチングを行うことについて説明する。その一例として検査パターンを登録する際、設計データの輪郭線分にパターンの凹凸情報を含んだベクトル情報(パターンを形成する辺に付される方向の情報)を付加することで、検査パターンからパターンの凹凸情報を判定することについて説明する。さらに、電子顕微鏡撮影画像のパターンから既知の凹凸判定法を用いて、検査対象パターンの凹凸情報を獲得し、各パターンの凹部、もしくは凸部の中心位置を算出することを可能とする。これら情報を用いて、検査パターンと検査対象パターンの中心位置同士の一致度を算出することで、最も一致度が高い点をパターンマッチング正解位置と判断することを可能とすることについて説明する。
【0017】
また、設計データから作成した検査パターンからパターン形状を認識し、上記凹凸情報を利用したパターンマッチング法に適しているか、また従来のパターンマッチング法に適しているか自動認識し、パターンマッチング法を切り替えることで、全体のマッチング精度の向上を可能とすることについて説明する。
【0018】
なお、以下の説明では画像形成装置の一種であるSEMによって取得された画像と、設計データ間のパターンマッチングを行う例について説明するが、これに限られることはなく、例えば試料上にイオンビームを走査することによって取得されるSIM(Scanning
Ion Microscope)像や、レーザー光を照射することによって得られる光学顕微鏡像に表示されるパターンと、設計データ上のパターンとのマッチングに適用するようにしても良い。
【0019】
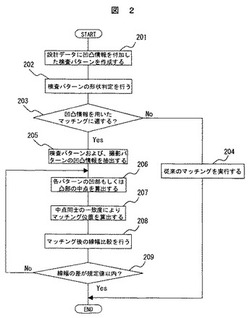
図1は、走査電子顕微鏡の構成概要のブロック図である。電子顕微鏡101内の、電子銃102から発せられた電子線103が電子レンズ113によって収束され、試料105に照射される。電子線照射によって、試料105表面から発生する二次電子114、或いは反射電子の強度が電子検出器106によって検出され、増幅器107で増幅される。電子線103の照射位置を移動させる偏向器104で、制御システム110の制御信号108によって電子線103を試料105表面上でラスタ走査させる。増幅器107から出力される信号を画像処理プロセッサ109内でAD変換し、デジタル画像データを作る。表示装置111は、画像データを表示する装置である。CADデータ等の半導体チップの設計データ112において、検査すべき領域を任意に指定することが可能である。制御システム110は、設計データ112及び検査すべき領域の情報を用いて半導体ウェーハの撮影や検査の為の制御、また、画像処理プロセッサ109への通信を行う。電子顕微鏡101、画像処理プロセッサ109,制御システム110,表示装置111,設計データ112を格納する装置から構成されるシステムはデータを交換する為の通信手段を有する。
【0020】
画像処理プロセッサ109は、制御システム110、或いは画像処理プロセッサ109に登録されたプログラムに基づいて、設計データと取得画像との間でパターンマッチングを行う。なお、マッチング処理に関しては色々な手法が考えられるが、2つの画像の相関をとって、その一致度を判断する正規化相関法を用いると良い。なお、本例の画像処理プロセッサ109、或いは制御システム110は、設計データに記録された個々の線図、或いはパターンに図示しない入力装置等から、情報を付加することが可能なプログラムを備えている。この付加される情報は、後述するようにパターンの凹部の情報、及び/又は凸情報、或いはパターン部(例えばラインパターン)及び/又は非パターン部(例えばラインパターン間に存在するスペース部)に関する情報である。このように付加された情報は、表示装置111上にて、後述するような表示形態で表現される。
【0021】
また、上記プログラムは、コンピュータ読み出し可能媒体として頒布可能であって、実際の頒布のために使用される特定のタイプの媒体に関係なく適用され得る。こうしたコンピュータ読み出し可能媒体の例には、フレキシブルディスク,CD−ROMなどの記録可能なタイプの媒体、並びに、デジタル及びアナログ通信リンクなどの伝送タイプの媒体が含まれる。
【0022】
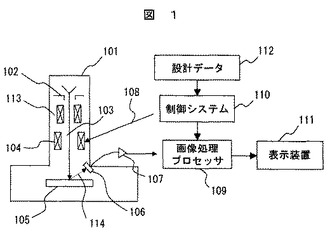
図2は、本発明の一実施例であり、パターンの凹凸情報を利用した設計データと、走査電子顕微鏡で撮影された画像パターンのパターンマッチング処理のフローチャートを示した図である。設計データとはここでは、半導体で作成されるLSI・半導体露光用マスク・液晶等を設計した際のCADデータ等の外形構造がわかる情報とする。本発明では、設計データと、走査電子顕微鏡で撮影された画像からパターンの凹凸情報を利用するため、まず設計データに凹凸情報を付加した検査パターンを作成201する。通常、半導体回路などの設計データは閉図形で表現されているが、実パターン上で、閉図形内部が凹部になるか、凸部になるかはマスク設定、またレジストがポジレジストであるか、ネガレジストであるかによって変化するため設計データからパターンの凹凸の判定をすることはできない。そこでマスクの設定、レジストの種類の情報より設計データのパターンが凹部か凸部か判定し、設計データからその情報を容易に取得できるようにするため、設計データの閉図形の線分を凹凸情報に合わせて一定方向に統一して表現する。このようにすることで、設計データから検査パターンとして、パターンの一部を切り取ってしまった場合にも、図形線分のベクトル情報からパターンの凹凸情報を引き出すことが可能になる。また、設計データの凹凸情報は、上記のようなマスク設定及びレジスト情報が存在しない場合でも、始めに、任意の検査パターンでパターンマッチングを実行し、走査電子顕微鏡で撮影された画像のパターンの凹凸情報を得ることで、設計データの閉図形が実パターンで凹部になっているか、凸部になっているか判定することができる。
【0023】
検査パターンの形状判定202は、設計データから検査パターンとして切り出されたパターンの形状を各図形を構成する線分数,ベクトル情報,図形配置座標から判別する。判定されるパターン形状の一例として、線(ライン)パターン,線端パターン,突き当てパターン,穴(ホール)パターン等が存在し、上記のような特定パターン以外はユニークパターンとして判別する。それぞれの検査パターンの判定方法は、全て平行な線分で検査パターンが構成されていたら、線(ライン)パターン,検査パターンの端で切断された矩形が単一もしくは平行に複数並んでいる場合は、線端パターン,検査パターンの対応する両端で切断された二つの矩形が単一、もしくは平行に複数並んでいたら突き当てパターン、矩形の配列パターンであったら穴(ホール)パターンと判定する。
【0024】
検査パターン形状判定202をすることで、従来のパターンマッチング法で位置照合が困難である特徴的な形状が無く、単調に繰り返されるパターンで、かつ凹凸判定を用いたパターンマッチングに適していると思われるパターンを自動で判別し、もしそのようなパターンであったなら凹凸判定を用いたパターンマッチングを、異なるパターンならば従来のパターンマッチングをする(204)ようにパターンマッチング法を自動で振り分ける203。
【0025】
次に、検査パターン及び、走査電子顕微鏡で撮影された画像パターンの凹凸情報を抽出する処理205を行う。検査パターンの凹凸情報はフロー201において、付加された情報を利用することで抽出することができる。また、走査電子顕微鏡で撮影された画像パターンにおいては、既知の手法であるパターンのエッジに対して垂直方向のプロファイル波形を解析することでパターンの凹凸情報を抽出することができる。また、走査電子顕微鏡で撮影された画像パターンの凹凸情報を取得する方法としては、ステレオ観察法などに代表される半導体の試料に対し、斜め方向からビームを照射して画像を撮影する方法が存在する。
【0026】
次に、フロー205で得た凹凸情報を用いて、検査パターンと画像パターンの凹部、もしくは凸部の線分間の値を求め、それぞれのパターンの中心位置を求める206。その中心位置同士の一致度をマッチング範囲内で調べ、最も一致度が高い位置をマッチング位置とする207。検査パターンと画像パターンの中心位置の一致度の算出法としては、一例として、検査パターンと画像パターンのマッチング範囲内の各点において、検査パターンと画像パターンの中心位置同士の最短距離を求め、最も距離が近くなる点をマッチング位置として決定する。
【0027】
最後に、フロー207で決定したマッチング位置において、パターンマッチング結果の検証を行うために、検出パターンと画像パターンのパターン線幅を比較し(208)、線幅が検出パターンと画像パターンの形状差の上限を超えていたら、フロー207のパターンマッチングは不正であると見なし、検出パターンの凹凸情報、あるいは画像パターンの凹凸情報を反転させ、再び凹凸情報を用いたパターンマッチングを行う(209)。この処理は、設計データにおける凹凸情報の設定ミスや、走査電子顕微鏡での撮影画像から凹凸判定処理での失敗によるパターンマッチング失敗を防ぐことを可能にする。
【0028】
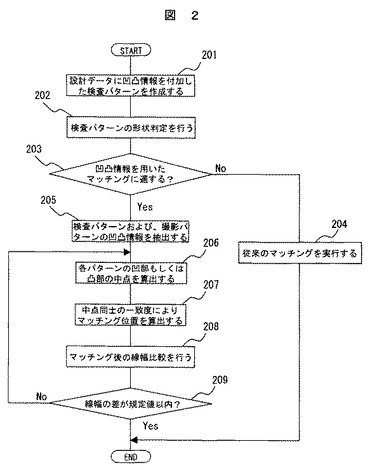
図3は、本発明の一実施例であり、設計データ301から検査パターン302を作成する時に、凹凸情報を付加する手法を示した図である。設計データ301は、閉図形で表現されているが、各図形の開始点,表現方向は統一されていない。また、上記のように設計データの閉図形内部が実パターン上で凹部になるか、凸部になるかはマスクの設定及びレジストの種類の組み合わせに寄るため、設計データから凹凸情報を判定することはできない。これらの問題を解決するために、検査パターンに含まれる閉図形の表現方向を調べ、全て同一方向に表現されるように線分ベクトルを変更する。ここで閉図形の表現方向を調べる一例として、複雑な図形の表現方向も検出できるように、各図形のベクトルの外積の総和を取り、その合計が正であれば図形は左回りに表現されており、負であれば右回りに表現されていることがわかる。検査パターン内の閉図形の表現方向を統一したのち、マスクの設定とレジストの種類から閉図形内部が凹部であるか、凸部であるか判定し、もし閉図形内部が実パターン上で凸部になる場合(凸パターン305)、検査パターンに含まれる全図形を左回り(パターン表現方向(左回り)303)に統一する。このようにして切り出した検査パターンは、検査パターンとして作成した時に設計データの図形の一部を切り出した場合においても、ベクトル情報よりパターンの凹凸判定が可能になる。また、閉図形内部が実パターン上で凹部になる場合(凹パターン308)は、検査パターンに含まれる全図形を右回り(パターン表現方向(右回り)306)に統一する。このようにして切り出した検査パターンもまた、検査パターンとして作成した時に設計データの図形の一部を切り出した場合においても、ベクトル情報よりパターンの凹凸判定が可能になる。検査パターン302のように、設計データの図形の一部を切り取って出来たラインパターンの場合、ラインを構成する線分のベクトル方向が下向きの場合、パターンは左から見て凹部から凸部に変化するとわかり、下向きのベクトルと上向きのベクトルに挟まれている部分が凸部、下向きのベクトルと上向きのベクトルに挟まれている部分が凹部になっていることがわかる。
【0029】
図7は、複雑な形状の設計データの一部をマッチングパターンとして切り出す例を説明する図である。図7に図示するような設計データ701上の部分703と部分704は設計データ上、同じ形状であり、単に設計データから部分703、或いは704を切り出した場合、パターンマッチング時に他の一方に誤ってマッチングしてしまう可能性があるが、本例のようにベクトル情報702を設計データに付加することによって、部分703,704を識別することが可能となり、この情報に基づくマッチングを行うことによって、マッチングの成功率を向上させることが可能となる。
【0030】
以上のように、本例では、設計データの少なくとも2辺、或いは2つの線分に付されたベクトル情報に基づいて、当該2辺、或いは2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのか、を判断している。無論、3辺以上のベクトル情報に基づいて、凹凸判定を行うようにしても良い。
【0031】
ベクトル情報は、パターンの少なくとも1点に設定することによって、特に複雑な処理を行うことなく、パターンを定義する線分に沿ってそのベクトル情報を展開することができるので、容易に設計データに凹凸情報を付加することができる。
【0032】
設計データとSEM画像との間のパターンマッチングにおいては、単に相関を採るだけではなく、上述した設計データの凹凸判定結果と、特許文献3,4に説明されているようなSEM画像の凹凸判定結果とを照合し、その突き合わせ結果も加味することで、パターンマッチングを行うようにしても良い。
【0033】
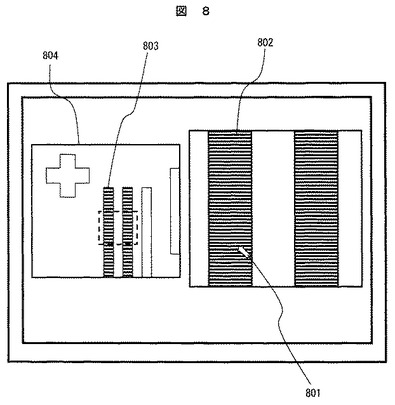
なお、パターン部と非パターン部を判断する他の手法として、設計データ301と検査パターン302を表示装置111に併せて表示すると共に、選択された閉図形を他の領域に対して識別して表示するようにしても良い。具体的には、図8に図示するように、カーソル801によって、パターン802を指定したとき、パターン802が属する閉図形
803を、低倍の設計データ804(少なくともパターンの端部等、パターン部,非パターン部を特定できる領域を含む像)上で、他の領域と識別して表示する。このように表示することによって、切り出す設計データのパターン形成状態を確認しつつ、マッチングパターンの形成が可能となる。
【0034】
また、単に表示するだけではなく、指定された閉図形を着色する等、他の領域と識別可能なデータを設計データ上に付加することによって、ラインアンドスペースパターンの一部を切り出してマッチングパターンとするような場合であっても、パターンマッチングの成功率を上げることが可能になる。この場合、理想的には切り出された設計データのパターン部と、非パターン部との濃淡比と、SEM画像上のパターン部と非パターン部との濃淡比が一致、或いは近似するように、設計データを着色、或いは色等を変更するようにする。このように所望の閉図形に、他の領域との識別が可能なデータを付加した状態の設計データを、パターンマッチング用のテンプレートとして登録することで、単なる線図に基づくパターンマッチング以上のマッチングの成功率が期待できる。
【0035】
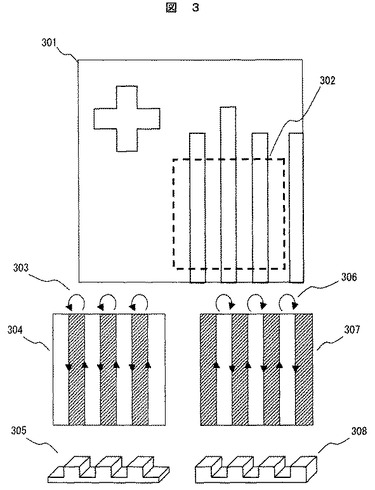
図4は、本発明の一実施例であり、設計データから作成した検査パターンと、走査電子顕微鏡で撮影した画像パターンの凹部、または凸部の中心点位置合わせ手法を示した図である。上記の手法により検査パターン401の凸部をベクトル線分より求め、その凸部の中心位置402を算出する。次に、走査電子顕微鏡で撮影した画像パターン405から既知であるラインプロファイルデータを用いた凹凸判定法等を用い、画像パターンの凹凸判定結果407を判定する。その結果より画像パターンの凸部の中心位置406を算出する。一例である検査パターン401のようなラインパターンの場合、パターンの上下方向に関し、検査パターンと画像パターンでマッチング位置を一意に決定することができない。そのため、検査パターンの形状判定でラインパターンと判別された時、マッチング方向をラインに対し垂直方向に自動で設定する。
【0036】
次に、中心点の一致度を調べるために、マッチング範囲の端から端まで(検査開始位置403から検査終了位置404まで)のそれぞれの中心位置同士の距離を求め、距離に対し、重み付けをすることで各点の一致度をスコア408のように表現することによって、中心位置の一致度を求めることを可能にする。このようにスコア化した後、スコアのピークを求め、その点をマッチング位置と判定する。しかし、ラインパターンを含む繰り返しパターンでは、一致度のピークが複数出てしまう。その場合、パターンマッチングの位置ずれが最小の位置、つまり最も近いピークをマッチング位置とする。
【0037】
図5は、本発明の一実施例であり、パターンマッチング結果の検証のためのパターン形状比較に関する図である。凹凸判定を用いたパターンマッチングでは、パターンマッチング結果の検証として、上記の検査パターンと画像パターンの中心位置の一致度のスコア値と、パターンマッチング結果後のパターン形状の比較によって行うことができる。パターン形状の比較はパターンに対して、垂直,水平方向の線幅の比較で行うことができるが、ラインパターン501,502の場合、パターン位置が不明のため、パターンの線幅とパターン間隔の比較によって形状比較を行う。比較方法は、パターン、あるいはパターン間隔の画像パターンの線幅503と検査パターンの線幅504を比較し、値の大きい方を分母、小さい方を分子とした分数で表すことで、パターンの形状比較を行う。また、比較したパターン、あるいはパターン間隔に隣接するパターンあるいはパターン間隔についても同様に画像パターンのパターン間隔505および検査パターンのパターン間隔506を比較し、値の大きい方を分母、小さい方を分子とした分数で表す。このように算出した値の平均をとって、その値がパターンの形状変化率の上限を超えている場合、パターンマッチングに失敗していると判断することを可能とする。図5の左図は凹凸判定に基づいてマッチングが成功した例を示しており、図5の右図はマッチングが失敗した例を示している。
【0038】
図6は、本発明の一実施例であり、突き当てパターン及び穴(ホール)パターンにおける凹凸判定を利用したパターンマッチング法を示した図である。突き当てパターン601、及び穴(ホール)の配列パターン604におけるパターンマッチングでは、上記のラインパターンのパターンの垂直方向のマッチングに加え、水平方向のマッチングを行う必要がある。突き当てパターンでは、まずパターンの垂直方向に関し、凹凸判定によるパターンマッチングを行う。
【0039】
凹凸判定に基づくパターン中心位置判定は、画面上下に配置された突き当てパターンの長手方向のエッジが画面水平方向(x方向)の同じ位置対象に存在する場合にはパターン全体で、そうでない場合は上下それぞれパターンにおいて行う(凹凸判定位置602)。x方向でマッチングを行った後、検査パターンのパターン水平方向(y方向)に沿って形成されたエッジに関し、凹凸判定情報を用いたパターンマッチングを行う(凹凸判定位置603)。水平方向に形成されたエッジに関するマッチングは凹凸判定情報を用いたパターンマッチング法でなく、従来のマッチング法で行うことも可能である。穴(ホール)パターンでは、まず画像パターンの凹凸判定位置が不明のため、画像パターンからエッジ位置を抽出する。エッジ位置の抽出方法は、既知画像処理手法であるソーベルフィルター,ラプラシアンフィルター,二値化法を用いた方法が存在する。上記で求めたエッジ位置に関し、画像パターンの垂直方向のエッジに関して凹凸判定を行う(凹凸判定位置605)。また検査パターンのベクトル情報を用いて、検査パターンの垂直方向のエッジに関して凹凸判定を行う。これにより上記の凹凸判定を用いたパターンマッチングを行い、垂直方向のマッチング位置を決定する。最後にパターンの水平方向のエッジに関し、同様にパターンマッチングを行い(凹凸判定位置606)、最終的なマッチング位置を決定する。
【図面の簡単な説明】
【0040】
【図1】走査電子顕微鏡の概要を説明する図。
【図2】本発明の一実施例であるパターンの凹凸情報を利用した設計データと、走査電子顕微鏡で撮影された画像のパターンマッチング処理を説明するフローチャート。
【図3】本発明の一実施例であるパターンに、凹凸情報を付加する手法を説明する図。
【図4】本発明の一実施例である設計データから作成したパターンと、走査電子顕微鏡で撮影した画像パターンの凹部、または凸部の中点合わせを説明する図。
【図5】本発明の一実施例であるパターンマッチング結果の検証のためのパターン形状比較を説明する図。
【図6】本発明の一実施例である突き当てパターン及び穴(ホール)パターンにおける凹凸判定を利用したパターンマッチング法を説明する図。
【図7】複雑な形状の設計データの一部をマッチングパターンとして切り出す例を説明する図。
【図8】低倍の設計データと高倍の設計データを併せて表示する例を説明する図。
【符号の説明】
【0041】
101…電子顕微鏡、102…電子銃、103…電子線、104…偏向器、105…試料、106…電子検出器、107…増幅器、108…制御信号、109…画像処理プロセッサ、110…制御システム、111…表示装置、112…設計データ、113…電子レンズ、114…二次電子、301…設計データ、302,401…検査パターン、303…パターン表現方向(左回り)、304…図形内部が凸部の場合の検査パターンのベクトル情報、305…パターン断面図、306…パターン表現方向(右回り)、307…図形内部が凹部の場合の検査パターンのベクトル情報、308…パターン断面、402…中心位置、403…検査開始位置、404…検査終了位置、405…画像パターン、406…凸部の中心位置、407…凹凸判定結果、408…スコア、501,502…ラインパターン、503…画像パターンの線幅、504…検査パターンの線幅、505…画像パターンのパターン間隔、506…検査パターンのパターン間、601…突き当てパターン、
602…パターン垂直方向、603…パターン水平方向、604…穴(ホール)の配列パターン、605…パターン垂直方向、606…パターン水平方向。
【背景技術】
【0001】
例えば半導体ウェハを測定,検査する走査電子顕微鏡(Scanning Electron Microscope:SEM)等では、パターンマッチング技術を用いて、所望の測定個所にその視野(Fieldof View :FOV)や走査個所の位置合せを行うことが行われている。特許文献1には、そのようなパターンマッチング法の一例が説明されている。
【0002】
パターンマッチングは、テンプレートと呼ばれる予め登録されたパターン画像と、SEM等で実際に取得された画像との間の一致度を測定することによって行われる。特許文献2には、パターンマッチング用のテンプレートを、半導体素子等の設計データに基づいて形成する例が説明されている。設計データに基づいてテンプレートを形成できれば、テンプレートを形成するためにわざわざSEM画像を取得するというような手間がなくなる等の利点がある。
【0003】
更に特許文献3,4には、ラインアンドスペースのように、同じ形状が単調に繰り返されるパターンの凹凸状態を把握することによって、凹部と凸部を取り違えることによるパターンマッチングの失敗を抑制する技術が説明されている。
【0004】
【特許文献1】特開2001−243906号公報(対応米国特許USP 6,627,888)
【特許文献2】特開2002−328015号公報(対応米国特許US2003/ 0173516)
【特許文献3】特開2003−90719号公報(対応米国特許USP 6,872,943)
【特許文献4】特開2004−251674号公報(対応米国特許US2004/ 0222375)
【発明の開示】
【発明が解決しようとする課題】
【0005】
設計データに基づいて形成されるテンプレートは、パターンの輪郭を定義する線分のみで表現される線図であるため、ラインアンドスペースのような同じ形状が単調に繰り返されるパターンの場合、パターン部と、非パターン部の判断が難しいという問題がある。
【0006】
特に、ラインアンドスペースパターンの場合、高倍率となり、ラインパターンの端部がFOVの外に位置することになると、2本の線分で定義される領域が、ライン部(凸部)或いはスペース部(凹部)のいずれに相当するのかを判断することが困難になるという問題がある。特許文献3,4に開示の技術は、SEM画像内での凹凸判定を行うためのものであり、設計データ内の凹凸判定を志向するものではなかった。
【0007】
本発明の目的は、設計データ内の凹凸情報を特定するのに好適な方法,プログラム及び装置の提供に係り、一例として同じような部分が羅列するようなパターンであっても、設計データと、画像形成装置等で取得された画像との間のパターンマッチングを高精度に行い得る方法,プログラム及び装置の提供にある。
【課題を解決するための手段】
【0008】
本発明によれば、上記目的を達成するために、設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うパターンマッチング方法、当該方法を実現するためのプログラム、及び装置において、前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法,プログラム、及び装置を提供するものである。
【発明の効果】
【0009】
上記構成によれば、単なる線図ではなく、設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報に基づいて、マッチングを行うことができるので、パターン部と非パターン部を取り違えることによるパターンマッチングの失敗を抑制することが可能となる。
【発明を実施するための最良の形態】
【0010】
半導体検査装置の一種である測長走査電子顕微鏡の検査対象は半導体チップ製造の際に半導体ウェーハ上に作られたパターンである。測長走査電子顕微鏡を用いて半導体チップの構造を解析する際には、検査を自動で連続に行う為、画像処理により位置照合を行う必要がある。その為に検査を自動で連続に行う前に撮影条件や、画像処理による位置照合の条件,検査項目等の検査条件を設定する必要がある。
【0011】
画像処理による位置照合はパターンマッチングと呼ばれる。パターンマッチングには自動で検査位置を探索する為に、検査対象とは別に特徴的な形状のパターンを予め登録する必要がある。この登録パターンは、例えば、測長走査電子顕微鏡で検査対象を撮影した画像や、撮影された画像から計算された輪郭線情報,CADデータ等の設計パターンの画像,設計パターンの輪郭線情報などが使用されている。この登録パターンを用い、検査を行う毎に撮影される画像である被検出パターンに対してパターンマッチングを行っている。
【0012】
検査パターンとしてCADデータ等の設計パターンの画像を用いることは、検査パターンの登録を容易にするだけでなく、検査パターンとして登録する為に検査対象を撮影する必要がないため、測長走査電子顕微鏡を占有する時間を短縮し、測長走査電子顕微鏡の稼働率を向上させる利点があるが、設計データと半導体ウェーハを撮影した電子顕微鏡撮影画像を被検出パターンとするパターンマッチングでは、半導体ウェーハ上のパターンが形状変化する問題により、パターンマッチングが失敗することがある。
【0013】
特に、線(ライン)のみで構成されるパターンのような特徴的な形状が無く、また単調に繰り返されるパターンにおけるパターンマッチングは、困難である。
【0014】
CADデータ等の設計データと電子顕微鏡撮影画像に関するパターンマッチングにおいて、線(ライン)のみで構成されるパターンのような特徴的な形状が無く、単調に繰り返されるパターン、またそのようなパターンにおいて、登録パターンと検査対象の形状が変化した場合、従来のマッチング手法では、マッチング位置を特定する情報が足りず、パターンマッチングに失敗することがあるという問題があった。
【0015】
以下の説明は、上記パターンにおいて、CADデータ等の設計データと電子顕微鏡撮影画像のパターン中心位置を合わせるパターンマッチングを可能とすることに関する。
【0016】
以下に設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、画像上のパターンとのパターンマッチングを行うことについて説明する。その一例として検査パターンを登録する際、設計データの輪郭線分にパターンの凹凸情報を含んだベクトル情報(パターンを形成する辺に付される方向の情報)を付加することで、検査パターンからパターンの凹凸情報を判定することについて説明する。さらに、電子顕微鏡撮影画像のパターンから既知の凹凸判定法を用いて、検査対象パターンの凹凸情報を獲得し、各パターンの凹部、もしくは凸部の中心位置を算出することを可能とする。これら情報を用いて、検査パターンと検査対象パターンの中心位置同士の一致度を算出することで、最も一致度が高い点をパターンマッチング正解位置と判断することを可能とすることについて説明する。
【0017】
また、設計データから作成した検査パターンからパターン形状を認識し、上記凹凸情報を利用したパターンマッチング法に適しているか、また従来のパターンマッチング法に適しているか自動認識し、パターンマッチング法を切り替えることで、全体のマッチング精度の向上を可能とすることについて説明する。
【0018】
なお、以下の説明では画像形成装置の一種であるSEMによって取得された画像と、設計データ間のパターンマッチングを行う例について説明するが、これに限られることはなく、例えば試料上にイオンビームを走査することによって取得されるSIM(Scanning
Ion Microscope)像や、レーザー光を照射することによって得られる光学顕微鏡像に表示されるパターンと、設計データ上のパターンとのマッチングに適用するようにしても良い。
【0019】
図1は、走査電子顕微鏡の構成概要のブロック図である。電子顕微鏡101内の、電子銃102から発せられた電子線103が電子レンズ113によって収束され、試料105に照射される。電子線照射によって、試料105表面から発生する二次電子114、或いは反射電子の強度が電子検出器106によって検出され、増幅器107で増幅される。電子線103の照射位置を移動させる偏向器104で、制御システム110の制御信号108によって電子線103を試料105表面上でラスタ走査させる。増幅器107から出力される信号を画像処理プロセッサ109内でAD変換し、デジタル画像データを作る。表示装置111は、画像データを表示する装置である。CADデータ等の半導体チップの設計データ112において、検査すべき領域を任意に指定することが可能である。制御システム110は、設計データ112及び検査すべき領域の情報を用いて半導体ウェーハの撮影や検査の為の制御、また、画像処理プロセッサ109への通信を行う。電子顕微鏡101、画像処理プロセッサ109,制御システム110,表示装置111,設計データ112を格納する装置から構成されるシステムはデータを交換する為の通信手段を有する。
【0020】
画像処理プロセッサ109は、制御システム110、或いは画像処理プロセッサ109に登録されたプログラムに基づいて、設計データと取得画像との間でパターンマッチングを行う。なお、マッチング処理に関しては色々な手法が考えられるが、2つの画像の相関をとって、その一致度を判断する正規化相関法を用いると良い。なお、本例の画像処理プロセッサ109、或いは制御システム110は、設計データに記録された個々の線図、或いはパターンに図示しない入力装置等から、情報を付加することが可能なプログラムを備えている。この付加される情報は、後述するようにパターンの凹部の情報、及び/又は凸情報、或いはパターン部(例えばラインパターン)及び/又は非パターン部(例えばラインパターン間に存在するスペース部)に関する情報である。このように付加された情報は、表示装置111上にて、後述するような表示形態で表現される。
【0021】
また、上記プログラムは、コンピュータ読み出し可能媒体として頒布可能であって、実際の頒布のために使用される特定のタイプの媒体に関係なく適用され得る。こうしたコンピュータ読み出し可能媒体の例には、フレキシブルディスク,CD−ROMなどの記録可能なタイプの媒体、並びに、デジタル及びアナログ通信リンクなどの伝送タイプの媒体が含まれる。
【0022】
図2は、本発明の一実施例であり、パターンの凹凸情報を利用した設計データと、走査電子顕微鏡で撮影された画像パターンのパターンマッチング処理のフローチャートを示した図である。設計データとはここでは、半導体で作成されるLSI・半導体露光用マスク・液晶等を設計した際のCADデータ等の外形構造がわかる情報とする。本発明では、設計データと、走査電子顕微鏡で撮影された画像からパターンの凹凸情報を利用するため、まず設計データに凹凸情報を付加した検査パターンを作成201する。通常、半導体回路などの設計データは閉図形で表現されているが、実パターン上で、閉図形内部が凹部になるか、凸部になるかはマスク設定、またレジストがポジレジストであるか、ネガレジストであるかによって変化するため設計データからパターンの凹凸の判定をすることはできない。そこでマスクの設定、レジストの種類の情報より設計データのパターンが凹部か凸部か判定し、設計データからその情報を容易に取得できるようにするため、設計データの閉図形の線分を凹凸情報に合わせて一定方向に統一して表現する。このようにすることで、設計データから検査パターンとして、パターンの一部を切り取ってしまった場合にも、図形線分のベクトル情報からパターンの凹凸情報を引き出すことが可能になる。また、設計データの凹凸情報は、上記のようなマスク設定及びレジスト情報が存在しない場合でも、始めに、任意の検査パターンでパターンマッチングを実行し、走査電子顕微鏡で撮影された画像のパターンの凹凸情報を得ることで、設計データの閉図形が実パターンで凹部になっているか、凸部になっているか判定することができる。
【0023】
検査パターンの形状判定202は、設計データから検査パターンとして切り出されたパターンの形状を各図形を構成する線分数,ベクトル情報,図形配置座標から判別する。判定されるパターン形状の一例として、線(ライン)パターン,線端パターン,突き当てパターン,穴(ホール)パターン等が存在し、上記のような特定パターン以外はユニークパターンとして判別する。それぞれの検査パターンの判定方法は、全て平行な線分で検査パターンが構成されていたら、線(ライン)パターン,検査パターンの端で切断された矩形が単一もしくは平行に複数並んでいる場合は、線端パターン,検査パターンの対応する両端で切断された二つの矩形が単一、もしくは平行に複数並んでいたら突き当てパターン、矩形の配列パターンであったら穴(ホール)パターンと判定する。
【0024】
検査パターン形状判定202をすることで、従来のパターンマッチング法で位置照合が困難である特徴的な形状が無く、単調に繰り返されるパターンで、かつ凹凸判定を用いたパターンマッチングに適していると思われるパターンを自動で判別し、もしそのようなパターンであったなら凹凸判定を用いたパターンマッチングを、異なるパターンならば従来のパターンマッチングをする(204)ようにパターンマッチング法を自動で振り分ける203。
【0025】
次に、検査パターン及び、走査電子顕微鏡で撮影された画像パターンの凹凸情報を抽出する処理205を行う。検査パターンの凹凸情報はフロー201において、付加された情報を利用することで抽出することができる。また、走査電子顕微鏡で撮影された画像パターンにおいては、既知の手法であるパターンのエッジに対して垂直方向のプロファイル波形を解析することでパターンの凹凸情報を抽出することができる。また、走査電子顕微鏡で撮影された画像パターンの凹凸情報を取得する方法としては、ステレオ観察法などに代表される半導体の試料に対し、斜め方向からビームを照射して画像を撮影する方法が存在する。
【0026】
次に、フロー205で得た凹凸情報を用いて、検査パターンと画像パターンの凹部、もしくは凸部の線分間の値を求め、それぞれのパターンの中心位置を求める206。その中心位置同士の一致度をマッチング範囲内で調べ、最も一致度が高い位置をマッチング位置とする207。検査パターンと画像パターンの中心位置の一致度の算出法としては、一例として、検査パターンと画像パターンのマッチング範囲内の各点において、検査パターンと画像パターンの中心位置同士の最短距離を求め、最も距離が近くなる点をマッチング位置として決定する。
【0027】
最後に、フロー207で決定したマッチング位置において、パターンマッチング結果の検証を行うために、検出パターンと画像パターンのパターン線幅を比較し(208)、線幅が検出パターンと画像パターンの形状差の上限を超えていたら、フロー207のパターンマッチングは不正であると見なし、検出パターンの凹凸情報、あるいは画像パターンの凹凸情報を反転させ、再び凹凸情報を用いたパターンマッチングを行う(209)。この処理は、設計データにおける凹凸情報の設定ミスや、走査電子顕微鏡での撮影画像から凹凸判定処理での失敗によるパターンマッチング失敗を防ぐことを可能にする。
【0028】
図3は、本発明の一実施例であり、設計データ301から検査パターン302を作成する時に、凹凸情報を付加する手法を示した図である。設計データ301は、閉図形で表現されているが、各図形の開始点,表現方向は統一されていない。また、上記のように設計データの閉図形内部が実パターン上で凹部になるか、凸部になるかはマスクの設定及びレジストの種類の組み合わせに寄るため、設計データから凹凸情報を判定することはできない。これらの問題を解決するために、検査パターンに含まれる閉図形の表現方向を調べ、全て同一方向に表現されるように線分ベクトルを変更する。ここで閉図形の表現方向を調べる一例として、複雑な図形の表現方向も検出できるように、各図形のベクトルの外積の総和を取り、その合計が正であれば図形は左回りに表現されており、負であれば右回りに表現されていることがわかる。検査パターン内の閉図形の表現方向を統一したのち、マスクの設定とレジストの種類から閉図形内部が凹部であるか、凸部であるか判定し、もし閉図形内部が実パターン上で凸部になる場合(凸パターン305)、検査パターンに含まれる全図形を左回り(パターン表現方向(左回り)303)に統一する。このようにして切り出した検査パターンは、検査パターンとして作成した時に設計データの図形の一部を切り出した場合においても、ベクトル情報よりパターンの凹凸判定が可能になる。また、閉図形内部が実パターン上で凹部になる場合(凹パターン308)は、検査パターンに含まれる全図形を右回り(パターン表現方向(右回り)306)に統一する。このようにして切り出した検査パターンもまた、検査パターンとして作成した時に設計データの図形の一部を切り出した場合においても、ベクトル情報よりパターンの凹凸判定が可能になる。検査パターン302のように、設計データの図形の一部を切り取って出来たラインパターンの場合、ラインを構成する線分のベクトル方向が下向きの場合、パターンは左から見て凹部から凸部に変化するとわかり、下向きのベクトルと上向きのベクトルに挟まれている部分が凸部、下向きのベクトルと上向きのベクトルに挟まれている部分が凹部になっていることがわかる。
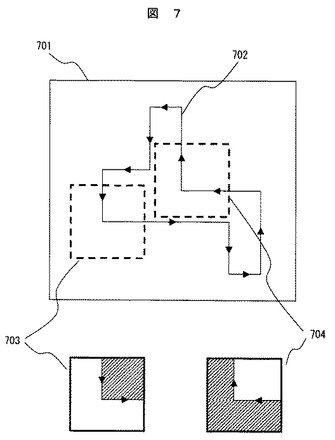
【0029】
図7は、複雑な形状の設計データの一部をマッチングパターンとして切り出す例を説明する図である。図7に図示するような設計データ701上の部分703と部分704は設計データ上、同じ形状であり、単に設計データから部分703、或いは704を切り出した場合、パターンマッチング時に他の一方に誤ってマッチングしてしまう可能性があるが、本例のようにベクトル情報702を設計データに付加することによって、部分703,704を識別することが可能となり、この情報に基づくマッチングを行うことによって、マッチングの成功率を向上させることが可能となる。
【0030】
以上のように、本例では、設計データの少なくとも2辺、或いは2つの線分に付されたベクトル情報に基づいて、当該2辺、或いは2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのか、を判断している。無論、3辺以上のベクトル情報に基づいて、凹凸判定を行うようにしても良い。
【0031】
ベクトル情報は、パターンの少なくとも1点に設定することによって、特に複雑な処理を行うことなく、パターンを定義する線分に沿ってそのベクトル情報を展開することができるので、容易に設計データに凹凸情報を付加することができる。
【0032】
設計データとSEM画像との間のパターンマッチングにおいては、単に相関を採るだけではなく、上述した設計データの凹凸判定結果と、特許文献3,4に説明されているようなSEM画像の凹凸判定結果とを照合し、その突き合わせ結果も加味することで、パターンマッチングを行うようにしても良い。
【0033】
なお、パターン部と非パターン部を判断する他の手法として、設計データ301と検査パターン302を表示装置111に併せて表示すると共に、選択された閉図形を他の領域に対して識別して表示するようにしても良い。具体的には、図8に図示するように、カーソル801によって、パターン802を指定したとき、パターン802が属する閉図形
803を、低倍の設計データ804(少なくともパターンの端部等、パターン部,非パターン部を特定できる領域を含む像)上で、他の領域と識別して表示する。このように表示することによって、切り出す設計データのパターン形成状態を確認しつつ、マッチングパターンの形成が可能となる。
【0034】
また、単に表示するだけではなく、指定された閉図形を着色する等、他の領域と識別可能なデータを設計データ上に付加することによって、ラインアンドスペースパターンの一部を切り出してマッチングパターンとするような場合であっても、パターンマッチングの成功率を上げることが可能になる。この場合、理想的には切り出された設計データのパターン部と、非パターン部との濃淡比と、SEM画像上のパターン部と非パターン部との濃淡比が一致、或いは近似するように、設計データを着色、或いは色等を変更するようにする。このように所望の閉図形に、他の領域との識別が可能なデータを付加した状態の設計データを、パターンマッチング用のテンプレートとして登録することで、単なる線図に基づくパターンマッチング以上のマッチングの成功率が期待できる。
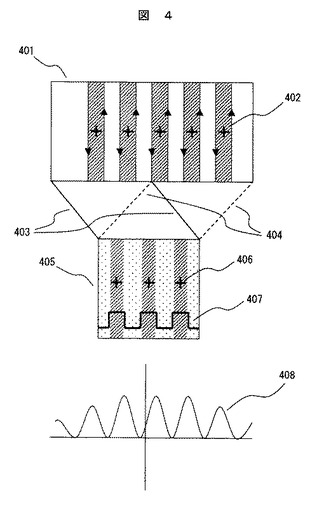
【0035】
図4は、本発明の一実施例であり、設計データから作成した検査パターンと、走査電子顕微鏡で撮影した画像パターンの凹部、または凸部の中心点位置合わせ手法を示した図である。上記の手法により検査パターン401の凸部をベクトル線分より求め、その凸部の中心位置402を算出する。次に、走査電子顕微鏡で撮影した画像パターン405から既知であるラインプロファイルデータを用いた凹凸判定法等を用い、画像パターンの凹凸判定結果407を判定する。その結果より画像パターンの凸部の中心位置406を算出する。一例である検査パターン401のようなラインパターンの場合、パターンの上下方向に関し、検査パターンと画像パターンでマッチング位置を一意に決定することができない。そのため、検査パターンの形状判定でラインパターンと判別された時、マッチング方向をラインに対し垂直方向に自動で設定する。
【0036】
次に、中心点の一致度を調べるために、マッチング範囲の端から端まで(検査開始位置403から検査終了位置404まで)のそれぞれの中心位置同士の距離を求め、距離に対し、重み付けをすることで各点の一致度をスコア408のように表現することによって、中心位置の一致度を求めることを可能にする。このようにスコア化した後、スコアのピークを求め、その点をマッチング位置と判定する。しかし、ラインパターンを含む繰り返しパターンでは、一致度のピークが複数出てしまう。その場合、パターンマッチングの位置ずれが最小の位置、つまり最も近いピークをマッチング位置とする。
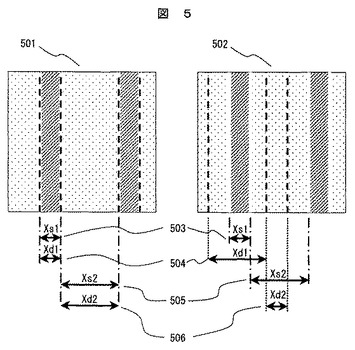
【0037】
図5は、本発明の一実施例であり、パターンマッチング結果の検証のためのパターン形状比較に関する図である。凹凸判定を用いたパターンマッチングでは、パターンマッチング結果の検証として、上記の検査パターンと画像パターンの中心位置の一致度のスコア値と、パターンマッチング結果後のパターン形状の比較によって行うことができる。パターン形状の比較はパターンに対して、垂直,水平方向の線幅の比較で行うことができるが、ラインパターン501,502の場合、パターン位置が不明のため、パターンの線幅とパターン間隔の比較によって形状比較を行う。比較方法は、パターン、あるいはパターン間隔の画像パターンの線幅503と検査パターンの線幅504を比較し、値の大きい方を分母、小さい方を分子とした分数で表すことで、パターンの形状比較を行う。また、比較したパターン、あるいはパターン間隔に隣接するパターンあるいはパターン間隔についても同様に画像パターンのパターン間隔505および検査パターンのパターン間隔506を比較し、値の大きい方を分母、小さい方を分子とした分数で表す。このように算出した値の平均をとって、その値がパターンの形状変化率の上限を超えている場合、パターンマッチングに失敗していると判断することを可能とする。図5の左図は凹凸判定に基づいてマッチングが成功した例を示しており、図5の右図はマッチングが失敗した例を示している。
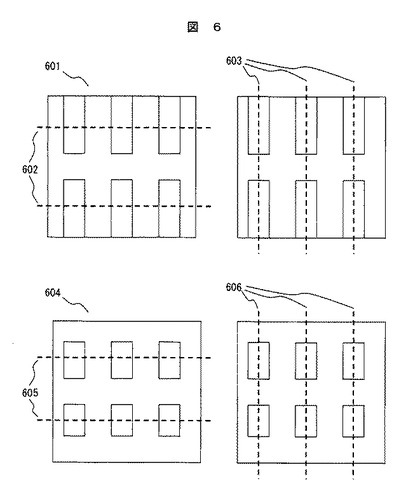
【0038】
図6は、本発明の一実施例であり、突き当てパターン及び穴(ホール)パターンにおける凹凸判定を利用したパターンマッチング法を示した図である。突き当てパターン601、及び穴(ホール)の配列パターン604におけるパターンマッチングでは、上記のラインパターンのパターンの垂直方向のマッチングに加え、水平方向のマッチングを行う必要がある。突き当てパターンでは、まずパターンの垂直方向に関し、凹凸判定によるパターンマッチングを行う。
【0039】
凹凸判定に基づくパターン中心位置判定は、画面上下に配置された突き当てパターンの長手方向のエッジが画面水平方向(x方向)の同じ位置対象に存在する場合にはパターン全体で、そうでない場合は上下それぞれパターンにおいて行う(凹凸判定位置602)。x方向でマッチングを行った後、検査パターンのパターン水平方向(y方向)に沿って形成されたエッジに関し、凹凸判定情報を用いたパターンマッチングを行う(凹凸判定位置603)。水平方向に形成されたエッジに関するマッチングは凹凸判定情報を用いたパターンマッチング法でなく、従来のマッチング法で行うことも可能である。穴(ホール)パターンでは、まず画像パターンの凹凸判定位置が不明のため、画像パターンからエッジ位置を抽出する。エッジ位置の抽出方法は、既知画像処理手法であるソーベルフィルター,ラプラシアンフィルター,二値化法を用いた方法が存在する。上記で求めたエッジ位置に関し、画像パターンの垂直方向のエッジに関して凹凸判定を行う(凹凸判定位置605)。また検査パターンのベクトル情報を用いて、検査パターンの垂直方向のエッジに関して凹凸判定を行う。これにより上記の凹凸判定を用いたパターンマッチングを行い、垂直方向のマッチング位置を決定する。最後にパターンの水平方向のエッジに関し、同様にパターンマッチングを行い(凹凸判定位置606)、最終的なマッチング位置を決定する。
【図面の簡単な説明】
【0040】
【図1】走査電子顕微鏡の概要を説明する図。
【図2】本発明の一実施例であるパターンの凹凸情報を利用した設計データと、走査電子顕微鏡で撮影された画像のパターンマッチング処理を説明するフローチャート。
【図3】本発明の一実施例であるパターンに、凹凸情報を付加する手法を説明する図。
【図4】本発明の一実施例である設計データから作成したパターンと、走査電子顕微鏡で撮影した画像パターンの凹部、または凸部の中点合わせを説明する図。
【図5】本発明の一実施例であるパターンマッチング結果の検証のためのパターン形状比較を説明する図。
【図6】本発明の一実施例である突き当てパターン及び穴(ホール)パターンにおける凹凸判定を利用したパターンマッチング法を説明する図。
【図7】複雑な形状の設計データの一部をマッチングパターンとして切り出す例を説明する図。
【図8】低倍の設計データと高倍の設計データを併せて表示する例を説明する図。
【符号の説明】
【0041】
101…電子顕微鏡、102…電子銃、103…電子線、104…偏向器、105…試料、106…電子検出器、107…増幅器、108…制御信号、109…画像処理プロセッサ、110…制御システム、111…表示装置、112…設計データ、113…電子レンズ、114…二次電子、301…設計データ、302,401…検査パターン、303…パターン表現方向(左回り)、304…図形内部が凸部の場合の検査パターンのベクトル情報、305…パターン断面図、306…パターン表現方向(右回り)、307…図形内部が凹部の場合の検査パターンのベクトル情報、308…パターン断面、402…中心位置、403…検査開始位置、404…検査終了位置、405…画像パターン、406…凸部の中心位置、407…凹凸判定結果、408…スコア、501,502…ラインパターン、503…画像パターンの線幅、504…検査パターンの線幅、505…画像パターンのパターン間隔、506…検査パターンのパターン間、601…突き当てパターン、
602…パターン垂直方向、603…パターン水平方向、604…穴(ホール)の配列パターン、605…パターン垂直方向、606…パターン水平方向。
【特許請求の範囲】
【請求項1】
設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うパターンマッチング方法において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法。
【請求項2】
請求項1において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報は、前記設計データの線分の方向に関する情報であることを特徴とするパターンマッチング方法。
【請求項3】
請求項2において、
前記設計データの少なくとも2つの線分の方向に関する情報に基づいて、当該2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのかを判断することを特徴とするパターンマッチング方法。
【請求項4】
設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うようにコンピュータを機能させるプログラムにおいて、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするコンピュータプログラム。
【請求項5】
請求項4において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報は、前記設計データの線分の方向に関する情報であることを特徴とするコンピュータプログラム。
【請求項6】
請求項5において、
前記設計データの少なくとも2つの線分の方向に関する情報に基づいて、当該2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのかを判断することを特徴とするコンピュータプログラム。
【請求項1】
設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うパターンマッチング方法において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするパターンマッチング方法。
【請求項2】
請求項1において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報は、前記設計データの線分の方向に関する情報であることを特徴とするパターンマッチング方法。
【請求項3】
請求項2において、
前記設計データの少なくとも2つの線分の方向に関する情報に基づいて、当該2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのかを判断することを特徴とするパターンマッチング方法。
【請求項4】
設計データ上のパターンと、画像形成装置によって得られた画像上のパターンとの間でマッチングを行うようにコンピュータを機能させるプログラムにおいて、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報を用いて、設計データ上のパターンと、前記画像上のパターンとのパターンマッチングを行うことを特徴とするコンピュータプログラム。
【請求項5】
請求項4において、
前記設計データ上のパターンの凹部及び/又は凸部、或いはパターン部及び/又は非パターン部に関する情報は、前記設計データの線分の方向に関する情報であることを特徴とするコンピュータプログラム。
【請求項6】
請求項5において、
前記設計データの少なくとも2つの線分の方向に関する情報に基づいて、当該2つの線分によって定義される領域が、凹部、或いは非パターン部なのか、凸部、或いはパターン部なのかを判断することを特徴とするコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2007−258287(P2007−258287A)
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願番号】特願2006−77955(P2006−77955)
【出願日】平成18年3月22日(2006.3.22)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願日】平成18年3月22日(2006.3.22)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]