
パターン入力装置
【発明の詳細な説明】
【0001】
【技術分野】本発明は、文字、図形等のパターンを情報処理装置に入力するパターン入力装置に関する。
【0002】
【背景技術】パターン入力装置としては、紙に描かれた文字、図形等を読み取るイメージスキャナが知られている。また、同一面内に配置された複数の圧力センサからなるパネルを有し、このパネルにユーザがペン状の部材を接触させると同時に移動させたとき、その軌跡を検出するようにした構成の装置や、液晶パネルを有し、この液晶パネルにユーザがライトペンを接触させると同時に移動させたとき、その軌跡を検出するようにした構成の装置も周知である。
【0003】以上のような従来の装置においては、紙に文字、図形等を一旦記入したり、ペン状の部材やライトペンを使用しなければならず、操作性が悪いという問題点があった。
【0004】
【発明の目的】よって、本発明は操作性の向上を図ることができるパターン入力装置を提供することを目的とする。
【0005】
【発明の構成】本発明による請求項1記載のパターン入力装置は、同一の検出面上の座標に対応して配置されかつ物体が接触したとき検出信号をそれぞれ発生する複数の接触検出器と、前記複数の接触検出器のうちの互いに隣接する複数の接触検出器の各々から検出信号が出力されたとき、検出信号を出力した接触検出器の座標を以て接触領域とし、前記接触領域のほぼ中心に位置する点からの距離に応じた重みづけを行って得られる値を前記接触領域内の各座標と対応させて評価値を生成する手段と、前記評価値を順次記憶する記憶手段と、前記記憶手段に記憶された評価値を複数の所定パターンの各々と対応させて、前記所定パターン毎に前記記憶された評価値の適合率を計算する手段と、前記適合率に基づいて前記検出面に前記物体の接触によって描かれたパターンを判別するパターン判別手段とからなっている。
【0006】また、本発明の請求項2記載のパターン入力装置によれば、前記パターン特定手段は、前記記憶手段に最初に記憶された評価値の座標と、前記所定パターンの開始点に対応した座標との位置合わせを行い、対応する座標同士の評価値を掛け合わせて得られた値の総和と、前記所定パターンの各座標の評価値の2乗の総和との比を計算して前記適合率を求めるものである。
【0007】
【発明の作用】本発明によるパターン入力装置によれば、物体と検出面との接触領域のほぼ中心からの距離に応じた重み付けがなされ、得られる適合率によって物体の描くパターンの判別がなされる。
【0008】
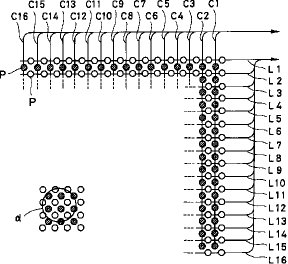
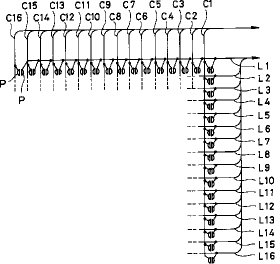
【実施例】以下、本発明の実施例につき添付図面を参照して詳細に説明する。図1において、互いに平行な16本の第1信号線C1 〜C16と、これら16本の第1信号線C1 〜C16に対して直交する方向に伸長する互いに平行な16本の第2信号線L1 〜L16とが配置されている。16本の第1信号線C1 〜C16の各々及び16本の第2信号線L1 〜L16の各々には導電性を有する金属で形成された16個のタッチプレートPが所定の間隔をもって配置接続されている。
【0009】尚、図1において、斜線の入った丸印は、第1信号線C1 〜C16のうちのいずれかに接続されているタッチプレートを表し、白丸印は、第2信号線L1 〜L16のうちのいずれかに接続されているタッチプレートを表している。この図1に示されているタッチセンサパネルにおいて、ユーザの指が計512個のタッチプレートPのうちの互いに隣接する少なくとも2つに同時に接触すると、人体の50/60Hz電源誘導により第1信号線C1 〜C16のうちの少なくとも1本及び第2信号線L1 〜L16のうちの少なくとも1本に50Hz又は60Hzの交流電圧が発生する。第1信号線C1 〜C16のうちの少なくとも1本に発生した交流電圧は、タッチセンサパネルのX方向における指の接触位置を示す信号として出力され、第2信号線L1 〜L16のうちの少なくとも1本に発生した交流電圧は、タッチセンサパネルのY方向における指の接触位置を示す信号として出力される。
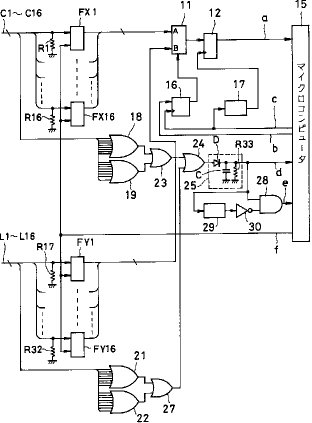
【0010】図2は、図1に示されているタッチセンサパネルに接触すると同時に移動する指の描くパターンを判別するパターン判別回路の回路ブロック図である。図2R>2において、第1信号線C1 〜C16の各々に導出された誘導電圧は、セット−リセット形の16個のフリップフロップFX1 〜FX16の各々のセット入力端子に供給される。また、第2信号線L1 〜L16の各々に導出された誘導電圧は、セット−リセット形の16個のフリップフロップFY1 〜FY16の各々のセット入力端子に供給される。フリップフロップFX1 〜FX16及びFY1 〜FY16のリセット入力端子にはマイクロコンピュータ15からリセット信号fが供給される。
【0011】また、フリップフロップFX1 〜FX16及びFY1〜FY16のセット入力端子と接地間には32個の抵抗R1 〜R32が接続されいる。これら抵抗R1 〜R32の抵抗値は、例えば4.7MΩである。フリップフロップFX1 〜FX16Q出力は、信号選択回路11の入力端子Aに供給されている。また、フリップフロップFY1 〜FY16Q出力は、信号選択回路11の入力端子Bに供給されている。信号選択回路11は、制御信号の供給を受けてこの制御信号が例えば高レベルのときは入力端子Aに供給されている信号を選択的に出力し、制御信号が例えば低レベルのときは入力端子Bに供給されている信号を選択的に出力する構成となっている。この信号選択回路11の出力は、16ビットのラッチ回路12に供給されている。ラッチ回路12の出力は、マイクロコンピュータ15のデータ入力aになっている。また、信号選択回路11には、1ビットラッチ回路16の出力が制御信号として供給されている。1ビットラッチ回路16のデータ入力端子にはマイクロコンピュータ15からセレクト信号bが供給される。この1ビットラッチ回路16のクロック入力端子にはマイクロコンピュータ15からラッチパルスcが供給される。ラッチパルスcは、ディレイ回路17によって時間T1だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給される。
【0012】一方、第1信号線C1 〜C8 の各々に導出された誘導電圧は、8入力ORゲート18に供給され、第1信号線C9 〜C16の各々に導出された誘導電圧は、8入力ORゲート19に供給される。また、第2信号線L1 〜L8 の各々に導出された誘導電圧は、8入力ORゲート21に供給され、第2信号線L9 〜L16の各々に導出された誘導電圧は、8入力ORゲート22に供給される。8入力ORゲート18、19の各出力は、2入力ORゲート23及び24を介してダイオードD、抵抗R33及びコンデンサCからなる時定数回路25に供給される。また、8入力ORゲート21、22の各出力は、2入力ORゲート27及び24を介して時定数回路25に供給される。
【0013】時定数回路25の出力は、マイクロコンピュータ15にレディ信号dとして供給されると共にANDゲート28の一方の入力端子に供給され、かつディレイ回路29によって時間T2 だけ遅延される。ディレイ回路29の出力は、インバータ30を介してANDゲート28の他方の入力端子に供給される。ANDゲート28の出力は、マイクロコンピュータ15にインタラプト信号eとして供給される。
【0014】マイクロコンピュータ15は、プロセッサ、ROM、RAM、入出力ポート等からなり、データ入力aをROMに予め格納されているプログラムに従って処理してタッチセンサパネルに接触した状態で移動するユーザの指の描くパターンに対応する文字または図形を判別する。以上の構成における各部の動作を図3に示すタイムチャート並びに図4乃至図7に示すフローチャートを参照して説明する。図3(a)は、第1及び第2信号線C1 〜C16及びL1 〜L16に導出される誘導電圧の波形図、同図(b)は、フリップフロップFX1 〜FX16及びFY1 〜FY16のQ出力の波形図、同図(c)は、ORゲート24の出力の波形図、同図(d)は、時定数回路25から出力されるレディ信号dの出力の波形図、同図(e)は、ディレイ回路29の出力の波形図、同図(f)は、インバータ30の出力の波形図、同図(g)は、ANDゲート28から出力されるインタラプト信号eの波形図、同図(h)は、セレクト信号bの波形図、同図(i)は、ラッチパルスcの波形図、同図(j)は、ラッチ回路16の出力の波形図、同図(k)は、ディレイ回路17の出力の波形図、同図(l)は、信号選択回路11の出力の波形図、同図(m)は、ラッチ回路12の出力の波形図である。
【0015】時刻t1 において、ユーザの指が図1のタッチセンサパネルにおける丸印αで囲まれた部分に接触すると、人体の50/60Hz電源誘導により第1信号線C1 〜C16のうちのC12〜C14及び第2信号線L1 〜L16のうちのL11〜L13に50Hz又は60Hzの交流電圧が発生する。この交流電圧の正の半サイクルにおいて、フリップフロップFX12〜FX14及びフリップフロップFY11〜FY13の各々のセット入力端子の電圧がスレショールドレベルVth以上となってこれらフリップフロップFX12〜FX14及びフリップフロップFY11〜FY13がセット状態となり、Q出力が高レベルとなる。また、それと同時に2入力ORゲート24の出力が高レベルになる。2入力ORゲート24の出力が高レベルになると、時定数回路25の出力は、ほぼ瞬時に高レベルになり、タッチセンサパネルにユーザの指が接触していることを示す高レベルのレディ信号dがマイクロコンピュータ15に供給される。2入力ORゲート24の出力が低レベルになると、時定数回路25の出力は、コンデンサC及び抵抗R32によって定まる時定数に応じた時間に亘って徐々に低レベルに変化する。
【0016】レディ信号dは、ディレイ回路29によって時間T2 だけ遅延されたのちインバータ30を介してANDゲート28の他方の入力端子に供給され、ANDゲート28の一方の入力端子にそのまま供給されているレディ信号dとの論理積がとられる。そうすると、ANDゲート28からレディ信号dの立ち上がりに同期して時間幅T2 のパルスが出力され、インタラプト信号eとしてマイクロコンピュータ15に供給される。
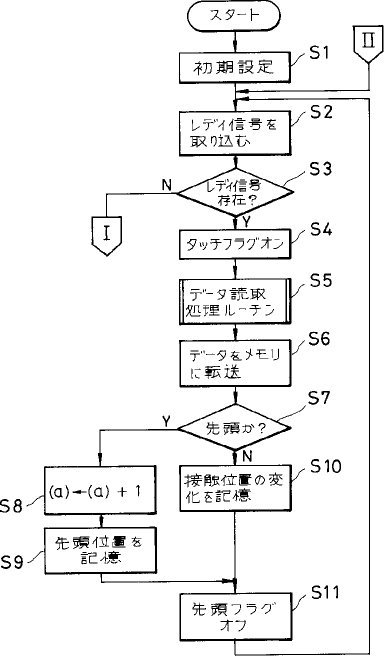
【0017】そうすると、マイクロコンピュータ15において、図3及び図4に示すサブルーチンの実行が開始される。すなわち、インタラプト信号eに応答してプロセッサは、先頭フラグをオンにし、タッチフラグをオフにして初期設定をなす(ステップS1)。次いで、プロセッサは、レディ信号dを取り込む動作を行い(ステップS2)、レディ信号dが存在するか否かを判定する(ステップS3)。ステップS3において、レディ信号dが存在しないと判定されたときは、プロセッサは後述するステップS12に移行する。ステップS3において、レディ信号dが存在すると判定されたときは、プロセッサはタッチフラグをセットし(ステップS4)、データ読取処理ルーチンを実行する(ステップS5)。
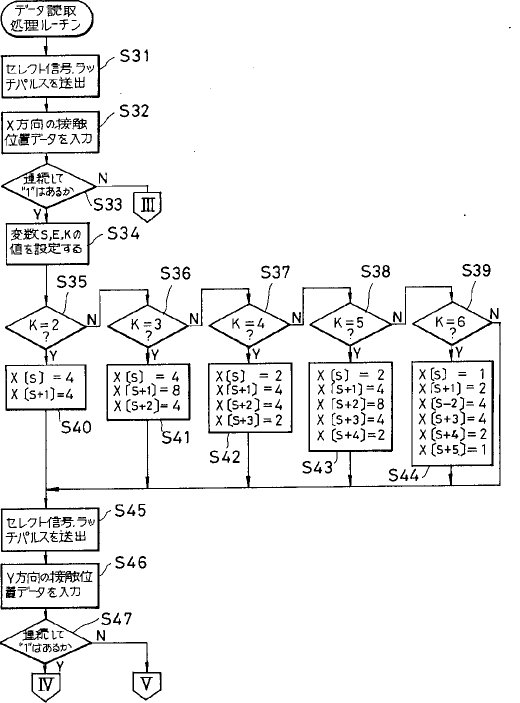
【0018】データ読取処理ルーチンにおいては、図6及び図7に示すようにプロセッサは高レベルのセレクト信号b及びラッチパルスcを送出する(ステップS31)。このステップS31によってラッチパルスcが出力された時(時刻t2 )、1ビットラッチ回路16に高レベルのセレクト信号bが保持され、信号選択回路11に高レベルの制御信号が供給されて信号選択回路11から16ビットのラッチ回路12にフリップフロップFX1 〜FX16のQ出力が選択的に供給されるようになる。また、ラッチパルスcは、ディレイ回路17によって時間T1 だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給されるので、時刻t2 から時間T1 後の時点においてフリップフロップFX1 〜FX16のQ出力が16ビットのラッチ回路12に保持されてX方向における指の接触位置を表すデータを形成するビットとしてマイクロコンピュータ15に供給される。
【0019】マイクロコンピュータ15のプロセッサは、ステップS31の実行後、X方向における指の接触位置を表すデータを取り込み(ステップS32)、取り込んだデータに連続して“1”(高レベル)になっている複数のビットが存在するか否かを判定する(ステップS33)。ステップS33において、上記複数のビットが存在しないと判定されたときは、プロセッサは後述するステップS66に移行する。ステップS33において、上記複数のビットが存在すると判定されたときは、プロセッサは変数Sを上記複数のビットの最下位ビットを表す値に設定し、変数Eを上記複数のビットの最上位ビットを表す値に設定し、変数Kを(E−S+1)に設定する(ステップS34)。
【0020】ステップS34の実行後、プロセッサは変数Kが2〜6の各々に等しいか否かを順次判定する(ステップS35〜S39)。ここで、X方向における指の接触位置を表すデータを形成する16個のビットの各々に対応する位置の評価値をそれぞれX[1]〜X[16]とする。ステップS35〜S39において、変数Kが2に等しいと判定されたときは、プロセッサはX[S]を4に設定し、X[S+1]を4に設定する(ステップS40)。変数Kが3に等しいと判定されたときは、プロセッサはX[S]及びX[S+2]を4に設定し、X[S+1]を8に設定する(ステップS41)。変数Kが4に等しいと判定されたときは、プロセッサはX[S]及びX[S+3]を2に設定し、X[S+1]及びX[S+2]を4に設定する(ステップS42)。変数Kが5に等しいと判定されたときは、プロセッサはX[S]及びX[S+4]を2に設定し、X[S+1]及びX[S+3]を4に設定し、X[S+2]を8に設定する(ステップS43)。変数Kが6に等しいと判定されたときは、プロセッサはX[S]及びX[S+5]を1に設定し、X[S+1]及びX[S+4]を2に設定し、X[S+2]及びX[S+3]を4に設定する(ステップS44)。
【0021】変数Kが2〜6のいずれにも等しくないと判定されたとき又はステップS40〜S44のうちのいずれかの実行後、プロセッサは低レベルのセレクト信号b及びラッチパルスcを送出する(ステップS45)。ステップS45によってラッチパルスcが出力された時(時刻t3 )、1ビットラッチ回路16に低レベルのセレクト信号bが保持され、信号選択回路11に低レベルの制御信号が供給されて信号選択回路11から16ビットのラッチ回路12にフリップフロップFY1 〜FY16のQ出力が選択的に供給されるようになる。また、ラッチパルスcは、ディレイ回路17によって時間T1 だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給されるので、時刻t3 から時間T1 後の時点においてフリップフロップFY1 〜FY16のQ出力が16ビットのラッチ回路12に保持されてY方向における指の接触位置を表すデータを形成するビットとしてマイクロコンピュータ15に供給される。
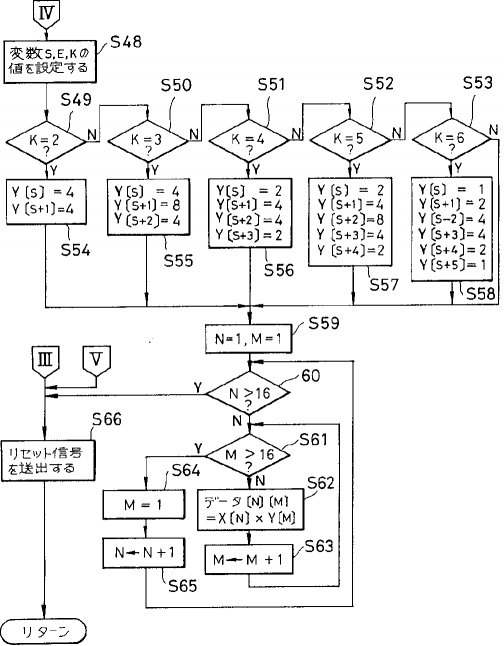
【0022】マイクロコンピュータ15のプロセッサは、ステップS45の実行後、Y方向における指の接触位置を表すデータを取り込み(ステップS46)、取り込んだデータに連続して“1”(高レベル)になっている複数のビットが存在するか否かを判定する(ステップS47)。ステップS47において、上記複数のビットが存在しないと判定されたときは、プロセッサは後述するステップS66に移行する。ステップS47において、上記複数のビットが存在すると判定されたときは、プロセッサは変数Sを上記複数のビットの最下位ビットを表す値に設定し、変数Eを上記複数のビットの最上位ビットを表す値に設定し、変数Kを(E−S+1)に設定する(ステップS48)。
【0023】ステップS48の実行後、プロセッサは変数Kが2〜6の各々に等しいか否かを順次判定する(ステップS49〜S53)。ここで、Y方向における指の接触位置を表すデータを形成する16個のビットの各々に対応する位置の評価値をそれぞれY[1]〜Y[16]とする。ステップS49〜S53において、変数Kが2に等しいと判定されたときは、プロセッサはY[S]を4に設定し、Y[S+1]を4に設定する(ステップS54)。変数Kが3に等しいと判定されたときは、プロセッサはY[S]及びY[S+2]を4に設定し、Y[S+1]を8に設定する(ステップS55)。変数Kが4に等しいと判定されたときは、プロセッサはY[S]及びY[S+3]を2に設定し、Y[S+1]及びY[S+2]を4に設定する(ステップS56)。変数Kが5に等しいと判定されたときは、プロセッサはY[S]及びY[S+4]を2に設定し、Y[S+1]及びY[S+3]を4に設定し、Y[S+2]を8に設定する(ステップS57)。変数Kが6に等しいと判定されたときは、プロセッサはY[S]及びY[S+5]を1に設定し、Y[S+1]及びY[S+4]を2に設定し、Y[S+2]及びY[S+3]を4に設定する(ステップS58)。
【0024】変数Kが2〜6のいずれにも等しくないと判定されたとき又はステップS54〜S58のうちのいずれかの実行後、プロセッサはN及びMを1に設定し(ステップS59)、Nが16より大であるか否かを判定する(ステップS60)。ステップS60においてNが16より大であると判定されたときは、プロセッサはリセット信号fを送出し(ステップS66)、データ読取処理ルーチンの実行を終了する。ステップS60においてNが16より大でないと判定されたときは、プロセッサはMが16より大であるか否かを判定する(ステップS61)。ステップS61おいてMが16より大でないと判定されたときは、プロセッサはデータ[N][M]をX[N]×Y[M]とする(ステップS62)。
【0025】尚、データ[N][M]は、図1に示すタッチセンサパネル上の各位置の総合評価値である。ステップS62の実行後、プロセッサはMに1を加算し(ステップS63)、ステップS61に移行する。ステップS61おいてMが16より大であると判定されたときは、プロセッサはMを1に設定し(ステップS64)、Nに1を加算し(ステップS65)、ステップS60に移行する。
【0026】以上のデータ読取処理ルーチンによって、例えば第1信号線C12〜C14及び第2信号線L11〜L13に交流電圧が発生した場合には、X[12]=4、X[13]=8、X[14]=4となり、また、Y[11]=4、Y[12]=8、Y[13]=4となるので、図8に示すような総合評価値による接触分布が得られる。
【0027】ステップS5の実行後、プロセッサはデータ読取処理ルーチンによって得られたタッチセンサパネル上の各位置の総合評価値を示すデータをRAMの所定領域に転送する。そして、総合評価値が既に記憶されている場合には既に記憶されている値と新たに得られた値のうちの大なる一方を記憶する(ステップS6)。こののち、プロセッサは先頭フラグがオンか否かを判定する(ステップS7)。ステップS7において先頭フラグがオンであると判定されたときは、プロセッサは計数値(a) に1を加算し(ステップS8)、接触面の中心位置を先頭位置としてRAMに記憶する(ステップS9)。ステップS7において先頭フラグがオンでないと判定されたときは、プロセッサは接触面の中心位置の今回値と前回値との差をRAMに記憶する(ステップS10)。ステップS9又はS10の実行後、プロセッサは先頭フラグをオフにし(ステップS12)、ステップS2に移行する。
【0028】ステップS8によってカウントアップする計数値(a) は、文字の要素数をあらわす値であり、例えば“は”の要素数は3である。また、ステップS9又はS10において、接触面の中心位置は、(接触面の一端の位置に対応する値+接触面の他端の位置に対応する値)/2という式によって得られる値の小数点以下を切り捨てて得られる値に対応する位置である。すなわち、例えば第1信号線C12〜C14及び第2信号線L11〜L13に交流電圧が発生した場合には、X方向における接触面の中心位置は、(12+14)/2=13からC13に対応する位置であり、Y方向における接触面の中心位置は、(11+13)/2=12からL12に対応する位置となる。
【0029】ステップS3においてレディ信号dが存在しないと判定されたときは、プロセッサは計数値(b) に1を加算し(ステップS12)、計数値(b) がAより大であるか否かを判定する(ステップS13)。ステップS13において計数値(b) がAより大でないと判定されたときは、プロセッサは計数値(b) がBより大であるか否かを判定する(ステップS14)。ステップS14において計数値(b) がBより大であると判定されたときは、プロセッサは先頭フラグをオンにし(ステップS15)、ステップS2に移行する。ステップS14において計数値(b) がBより大でないと判定されたときは、プロセッサは直ちにステップS2に移行する。また、ステップS13において計数値(b) がAより大であると判定されたときは、プロセッサはタッチフラグがオンであるか否かを判定する(ステップS16)。
【0030】ステップS12によってカウントアップする計数値(b) は、ユーザの指がタッチセンサパネルに接触している時間を表す値であり、ステップS13及びS14においては(b) >Aであれば長時間指入力がなく一文字の入力が終了したとみなし、A>(b) >Bであれば一文字の中での要素間の移動があったとみなし、B>(b) であれば一瞬指が離れた場合でも継続して指が接触しているとみなしているのである。
【0031】以上のステップS1〜S15によって図9に示すような指の接触位置の中心の軌跡のパターン及び図10に示すような総合評価値による接触分布がRAMに記憶される。ステップS16においてタッチフラグがオンでないと判定されたときは、プロセッサはステップS1に移行する直前に実行していたルーチンの実行を再開する。ステップS16においてタッチフラグがオンであると判定されたときは、プロセッサはRAM内のアドレスを示すポインタと称される数値を初期設定して入力パターンの最初の要素が記憶されているアドレスに対応する値にし(ステップS17)、ROMに予め記憶されている全ての基準パターンの各々の先頭位置をポインタによって示されているアドレスに記憶されている入力パターンの先頭位置に合わせたときの基準パターンの終了位置及び移動方向を計算し(ステップS18)、ROMに予め記憶されている全ての基準パターンのうちのステップS18によって計算して得られた終了位置が入力パターンの終了位置に一致するパターンを選択して第1候補パターン群を形成し(ステップS19)、ROMに予め記憶されている全ての基準パターンのうちのステップS18によって計算して得られた移動方向が入力パターンの移動方向に一致するパターンを選択して第2候補パターン群を形成する(ステップS20)。こののち、プロセッサは第1候補パターン群及び第2候補パターン群の双方に属する基準パターンを選択して第3候補パターン群を形成し、第3候補パターン群の各々について入力パターンとのデータの重ね合わせ行って適合率を計算する(ステップS21)。
【0032】ステップS21において、入力パターンと基準パターンとの適合率は、両パターンの先頭位置の位置合わせを行った後に対応する位置同士の評価値を掛け合わせて得られた値の総和と基準パターンの各位置の評価値の2乗の総和との比である。すなわち、例えば“は”という文字の左の部分の入力パターンとして図11R>1(a)に示すような指の接触位置の中心の軌跡のパターンが得られた場合、この入力パターンと図11(b)に示すような基準パターンとの適合率は、〇印の評価値を8とすれば、8×8×6/8×8×9=67%である。尚、図11において破線は、対応する位置を示している。
【0033】また、接触分布を加味した場合、すなわち例えば“は”という文字の左の部分の入力パターンとして図12(a)に示すような接触分布が得られた場合、この入力パターンと図12(b)に示すような基準パターンとの適合率は、〇印の評価値を8とし、△印の評価値を4とすれば、89%となる。従って、接触分布を加味した方が判定率が向上するのである。尚、図12において破線、一点鎖線及び二点鎖線は、対応する位置を示している。
【0034】ステップS21の実行後、プロセッサは計数値(a) によって入力パターンの各要素全てについての基準パターンとの適合率の計算が終了したか否かを判定する(ステップS22)。ステップS22において入力パターンの各要素全てについての基準パターンとの適合率の計算が終了したと判定されたときは、プロセッサは第3候補パターン群のうちの適合率の最も高いものを選択して入力パターンを特定し(ステップS23)、ステップS1に移行する直前に実行していたルーチンの実行を再開する。ステップS22において入力パターンの各要素全てについての基準パターンとの適合率の計算が終了してないと判定されたときは、プロセッサは入力パターンの次の要素についての処理をなすべくRAM内のアドレスを示すポインタと称される値を入力パターンの次の要素に関するデータが記憶されているアドレスを示す値に変化させ(ステップS24)、ステップS18に移行する。
【0035】図13は、タッチセンサパネルの他の例を示す図である。同図において、16本の第1信号線C1 〜C16及び16本の第2信号線L1 〜L16は、図1と同様に配置されている。しかしながら、本例においては16本の第1信号線C1 〜C16の各々及び16本の第2信号線L1 〜L16の各々に接続されているタッチプレートPの形状は、半円形であり、第1信号線C1 〜C16の各々に接続されているタッチプレートPの直線部分と第2信号線L1 〜L16の各々に接続されているタッチプレートPの直線部分とが互いに対向するようにタッチプレートPの配置がなされている。かかる構成においても図1と同様の作用が働く。
【0036】尚、上記実施例においてはタッチセンサパネルは、電源誘導による方式のタッチセンサパネルであるとしたが、スキャン方式のタッチセンサパネルを使用することもでき、その場合には第1及び第2信号線のうちの一方にダイナミックエンコーダのドライブ出力を供給し、第1及び第2信号線のうちの他方に導出される信号をダイナミックエンコーダのセンサ入力とし、ダイナミックエンコーダのセンサ出力をマイクロコンピュータ15に供給すればよい。
【0037】
【発明の効果】以上詳述した如く本発明によるパターン入力装置によれば、検出面の面積が比較的小さい場合でも、ペン等の器具を使用せずにパターン入力が可能となり、操作性を良くすることができるのである。
【0038】また、本発明による他のパターン入力装置によれば、物体と検出面との接触面のほぼ中心からの距離に応じた重み付けがなされるので、例えば物体の描く入力パターンと基準パターンとの適合率の計算の精度を高くすることができ、物体の描くパターンの判別をより正確になすことができるのである。
【図面の簡単な説明】
【図1】本発明の実施例を示す回路図である。
【図2】本発明の実施例を示す回路ブロック図である。
【図3】図1及び図2に示す装置の各部の動作を示す波形図である。
【図4】図1及び図2に示す装置の動作を示すフロ―図である。
【図5】図1及び図2に示す装置の動作を示すフロ―図である。
【図6】図1及び図2に示す装置の動作を示すフロ―図である。
【図7】図1及び図2に示す装置の動作を示すフロ―図である。
【図8】接触分布を示す図である。
【図9】指の接触位置の中心の軌跡のパターンを示す図である。
【図10】接触分布図を示す図である。
【図11】入力パターンと基準パターンとの適合率の計算方法を示す図である。
【図12】入力パターンと基準パターンとの適合率の計算方法を示す図である。
【図13】他の実施例を示す回路図である。
【主要部分の符号の説明】
P……タッチプレート C1 〜C16……第1信号線
L1 〜L16……第2信号線 15……マイクロコンピュータ
【0001】
【技術分野】本発明は、文字、図形等のパターンを情報処理装置に入力するパターン入力装置に関する。
【0002】
【背景技術】パターン入力装置としては、紙に描かれた文字、図形等を読み取るイメージスキャナが知られている。また、同一面内に配置された複数の圧力センサからなるパネルを有し、このパネルにユーザがペン状の部材を接触させると同時に移動させたとき、その軌跡を検出するようにした構成の装置や、液晶パネルを有し、この液晶パネルにユーザがライトペンを接触させると同時に移動させたとき、その軌跡を検出するようにした構成の装置も周知である。
【0003】以上のような従来の装置においては、紙に文字、図形等を一旦記入したり、ペン状の部材やライトペンを使用しなければならず、操作性が悪いという問題点があった。
【0004】
【発明の目的】よって、本発明は操作性の向上を図ることができるパターン入力装置を提供することを目的とする。
【0005】
【発明の構成】本発明による請求項1記載のパターン入力装置は、同一の検出面上の座標に対応して配置されかつ物体が接触したとき検出信号をそれぞれ発生する複数の接触検出器と、前記複数の接触検出器のうちの互いに隣接する複数の接触検出器の各々から検出信号が出力されたとき、検出信号を出力した接触検出器の座標を以て接触領域とし、前記接触領域のほぼ中心に位置する点からの距離に応じた重みづけを行って得られる値を前記接触領域内の各座標と対応させて評価値を生成する手段と、前記評価値を順次記憶する記憶手段と、前記記憶手段に記憶された評価値を複数の所定パターンの各々と対応させて、前記所定パターン毎に前記記憶された評価値の適合率を計算する手段と、前記適合率に基づいて前記検出面に前記物体の接触によって描かれたパターンを判別するパターン判別手段とからなっている。
【0006】また、本発明の請求項2記載のパターン入力装置によれば、前記パターン特定手段は、前記記憶手段に最初に記憶された評価値の座標と、前記所定パターンの開始点に対応した座標との位置合わせを行い、対応する座標同士の評価値を掛け合わせて得られた値の総和と、前記所定パターンの各座標の評価値の2乗の総和との比を計算して前記適合率を求めるものである。
【0007】
【発明の作用】本発明によるパターン入力装置によれば、物体と検出面との接触領域のほぼ中心からの距離に応じた重み付けがなされ、得られる適合率によって物体の描くパターンの判別がなされる。
【0008】
【実施例】以下、本発明の実施例につき添付図面を参照して詳細に説明する。図1において、互いに平行な16本の第1信号線C1 〜C16と、これら16本の第1信号線C1 〜C16に対して直交する方向に伸長する互いに平行な16本の第2信号線L1 〜L16とが配置されている。16本の第1信号線C1 〜C16の各々及び16本の第2信号線L1 〜L16の各々には導電性を有する金属で形成された16個のタッチプレートPが所定の間隔をもって配置接続されている。
【0009】尚、図1において、斜線の入った丸印は、第1信号線C1 〜C16のうちのいずれかに接続されているタッチプレートを表し、白丸印は、第2信号線L1 〜L16のうちのいずれかに接続されているタッチプレートを表している。この図1に示されているタッチセンサパネルにおいて、ユーザの指が計512個のタッチプレートPのうちの互いに隣接する少なくとも2つに同時に接触すると、人体の50/60Hz電源誘導により第1信号線C1 〜C16のうちの少なくとも1本及び第2信号線L1 〜L16のうちの少なくとも1本に50Hz又は60Hzの交流電圧が発生する。第1信号線C1 〜C16のうちの少なくとも1本に発生した交流電圧は、タッチセンサパネルのX方向における指の接触位置を示す信号として出力され、第2信号線L1 〜L16のうちの少なくとも1本に発生した交流電圧は、タッチセンサパネルのY方向における指の接触位置を示す信号として出力される。
【0010】図2は、図1に示されているタッチセンサパネルに接触すると同時に移動する指の描くパターンを判別するパターン判別回路の回路ブロック図である。図2R>2において、第1信号線C1 〜C16の各々に導出された誘導電圧は、セット−リセット形の16個のフリップフロップFX1 〜FX16の各々のセット入力端子に供給される。また、第2信号線L1 〜L16の各々に導出された誘導電圧は、セット−リセット形の16個のフリップフロップFY1 〜FY16の各々のセット入力端子に供給される。フリップフロップFX1 〜FX16及びFY1 〜FY16のリセット入力端子にはマイクロコンピュータ15からリセット信号fが供給される。
【0011】また、フリップフロップFX1 〜FX16及びFY1〜FY16のセット入力端子と接地間には32個の抵抗R1 〜R32が接続されいる。これら抵抗R1 〜R32の抵抗値は、例えば4.7MΩである。フリップフロップFX1 〜FX16Q出力は、信号選択回路11の入力端子Aに供給されている。また、フリップフロップFY1 〜FY16Q出力は、信号選択回路11の入力端子Bに供給されている。信号選択回路11は、制御信号の供給を受けてこの制御信号が例えば高レベルのときは入力端子Aに供給されている信号を選択的に出力し、制御信号が例えば低レベルのときは入力端子Bに供給されている信号を選択的に出力する構成となっている。この信号選択回路11の出力は、16ビットのラッチ回路12に供給されている。ラッチ回路12の出力は、マイクロコンピュータ15のデータ入力aになっている。また、信号選択回路11には、1ビットラッチ回路16の出力が制御信号として供給されている。1ビットラッチ回路16のデータ入力端子にはマイクロコンピュータ15からセレクト信号bが供給される。この1ビットラッチ回路16のクロック入力端子にはマイクロコンピュータ15からラッチパルスcが供給される。ラッチパルスcは、ディレイ回路17によって時間T1だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給される。
【0012】一方、第1信号線C1 〜C8 の各々に導出された誘導電圧は、8入力ORゲート18に供給され、第1信号線C9 〜C16の各々に導出された誘導電圧は、8入力ORゲート19に供給される。また、第2信号線L1 〜L8 の各々に導出された誘導電圧は、8入力ORゲート21に供給され、第2信号線L9 〜L16の各々に導出された誘導電圧は、8入力ORゲート22に供給される。8入力ORゲート18、19の各出力は、2入力ORゲート23及び24を介してダイオードD、抵抗R33及びコンデンサCからなる時定数回路25に供給される。また、8入力ORゲート21、22の各出力は、2入力ORゲート27及び24を介して時定数回路25に供給される。
【0013】時定数回路25の出力は、マイクロコンピュータ15にレディ信号dとして供給されると共にANDゲート28の一方の入力端子に供給され、かつディレイ回路29によって時間T2 だけ遅延される。ディレイ回路29の出力は、インバータ30を介してANDゲート28の他方の入力端子に供給される。ANDゲート28の出力は、マイクロコンピュータ15にインタラプト信号eとして供給される。
【0014】マイクロコンピュータ15は、プロセッサ、ROM、RAM、入出力ポート等からなり、データ入力aをROMに予め格納されているプログラムに従って処理してタッチセンサパネルに接触した状態で移動するユーザの指の描くパターンに対応する文字または図形を判別する。以上の構成における各部の動作を図3に示すタイムチャート並びに図4乃至図7に示すフローチャートを参照して説明する。図3(a)は、第1及び第2信号線C1 〜C16及びL1 〜L16に導出される誘導電圧の波形図、同図(b)は、フリップフロップFX1 〜FX16及びFY1 〜FY16のQ出力の波形図、同図(c)は、ORゲート24の出力の波形図、同図(d)は、時定数回路25から出力されるレディ信号dの出力の波形図、同図(e)は、ディレイ回路29の出力の波形図、同図(f)は、インバータ30の出力の波形図、同図(g)は、ANDゲート28から出力されるインタラプト信号eの波形図、同図(h)は、セレクト信号bの波形図、同図(i)は、ラッチパルスcの波形図、同図(j)は、ラッチ回路16の出力の波形図、同図(k)は、ディレイ回路17の出力の波形図、同図(l)は、信号選択回路11の出力の波形図、同図(m)は、ラッチ回路12の出力の波形図である。
【0015】時刻t1 において、ユーザの指が図1のタッチセンサパネルにおける丸印αで囲まれた部分に接触すると、人体の50/60Hz電源誘導により第1信号線C1 〜C16のうちのC12〜C14及び第2信号線L1 〜L16のうちのL11〜L13に50Hz又は60Hzの交流電圧が発生する。この交流電圧の正の半サイクルにおいて、フリップフロップFX12〜FX14及びフリップフロップFY11〜FY13の各々のセット入力端子の電圧がスレショールドレベルVth以上となってこれらフリップフロップFX12〜FX14及びフリップフロップFY11〜FY13がセット状態となり、Q出力が高レベルとなる。また、それと同時に2入力ORゲート24の出力が高レベルになる。2入力ORゲート24の出力が高レベルになると、時定数回路25の出力は、ほぼ瞬時に高レベルになり、タッチセンサパネルにユーザの指が接触していることを示す高レベルのレディ信号dがマイクロコンピュータ15に供給される。2入力ORゲート24の出力が低レベルになると、時定数回路25の出力は、コンデンサC及び抵抗R32によって定まる時定数に応じた時間に亘って徐々に低レベルに変化する。
【0016】レディ信号dは、ディレイ回路29によって時間T2 だけ遅延されたのちインバータ30を介してANDゲート28の他方の入力端子に供給され、ANDゲート28の一方の入力端子にそのまま供給されているレディ信号dとの論理積がとられる。そうすると、ANDゲート28からレディ信号dの立ち上がりに同期して時間幅T2 のパルスが出力され、インタラプト信号eとしてマイクロコンピュータ15に供給される。
【0017】そうすると、マイクロコンピュータ15において、図3及び図4に示すサブルーチンの実行が開始される。すなわち、インタラプト信号eに応答してプロセッサは、先頭フラグをオンにし、タッチフラグをオフにして初期設定をなす(ステップS1)。次いで、プロセッサは、レディ信号dを取り込む動作を行い(ステップS2)、レディ信号dが存在するか否かを判定する(ステップS3)。ステップS3において、レディ信号dが存在しないと判定されたときは、プロセッサは後述するステップS12に移行する。ステップS3において、レディ信号dが存在すると判定されたときは、プロセッサはタッチフラグをセットし(ステップS4)、データ読取処理ルーチンを実行する(ステップS5)。
【0018】データ読取処理ルーチンにおいては、図6及び図7に示すようにプロセッサは高レベルのセレクト信号b及びラッチパルスcを送出する(ステップS31)。このステップS31によってラッチパルスcが出力された時(時刻t2 )、1ビットラッチ回路16に高レベルのセレクト信号bが保持され、信号選択回路11に高レベルの制御信号が供給されて信号選択回路11から16ビットのラッチ回路12にフリップフロップFX1 〜FX16のQ出力が選択的に供給されるようになる。また、ラッチパルスcは、ディレイ回路17によって時間T1 だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給されるので、時刻t2 から時間T1 後の時点においてフリップフロップFX1 〜FX16のQ出力が16ビットのラッチ回路12に保持されてX方向における指の接触位置を表すデータを形成するビットとしてマイクロコンピュータ15に供給される。
【0019】マイクロコンピュータ15のプロセッサは、ステップS31の実行後、X方向における指の接触位置を表すデータを取り込み(ステップS32)、取り込んだデータに連続して“1”(高レベル)になっている複数のビットが存在するか否かを判定する(ステップS33)。ステップS33において、上記複数のビットが存在しないと判定されたときは、プロセッサは後述するステップS66に移行する。ステップS33において、上記複数のビットが存在すると判定されたときは、プロセッサは変数Sを上記複数のビットの最下位ビットを表す値に設定し、変数Eを上記複数のビットの最上位ビットを表す値に設定し、変数Kを(E−S+1)に設定する(ステップS34)。
【0020】ステップS34の実行後、プロセッサは変数Kが2〜6の各々に等しいか否かを順次判定する(ステップS35〜S39)。ここで、X方向における指の接触位置を表すデータを形成する16個のビットの各々に対応する位置の評価値をそれぞれX[1]〜X[16]とする。ステップS35〜S39において、変数Kが2に等しいと判定されたときは、プロセッサはX[S]を4に設定し、X[S+1]を4に設定する(ステップS40)。変数Kが3に等しいと判定されたときは、プロセッサはX[S]及びX[S+2]を4に設定し、X[S+1]を8に設定する(ステップS41)。変数Kが4に等しいと判定されたときは、プロセッサはX[S]及びX[S+3]を2に設定し、X[S+1]及びX[S+2]を4に設定する(ステップS42)。変数Kが5に等しいと判定されたときは、プロセッサはX[S]及びX[S+4]を2に設定し、X[S+1]及びX[S+3]を4に設定し、X[S+2]を8に設定する(ステップS43)。変数Kが6に等しいと判定されたときは、プロセッサはX[S]及びX[S+5]を1に設定し、X[S+1]及びX[S+4]を2に設定し、X[S+2]及びX[S+3]を4に設定する(ステップS44)。
【0021】変数Kが2〜6のいずれにも等しくないと判定されたとき又はステップS40〜S44のうちのいずれかの実行後、プロセッサは低レベルのセレクト信号b及びラッチパルスcを送出する(ステップS45)。ステップS45によってラッチパルスcが出力された時(時刻t3 )、1ビットラッチ回路16に低レベルのセレクト信号bが保持され、信号選択回路11に低レベルの制御信号が供給されて信号選択回路11から16ビットのラッチ回路12にフリップフロップFY1 〜FY16のQ出力が選択的に供給されるようになる。また、ラッチパルスcは、ディレイ回路17によって時間T1 だけ遅延されて16ビットのラッチ回路12のクロック入力端子に供給されるので、時刻t3 から時間T1 後の時点においてフリップフロップFY1 〜FY16のQ出力が16ビットのラッチ回路12に保持されてY方向における指の接触位置を表すデータを形成するビットとしてマイクロコンピュータ15に供給される。
【0022】マイクロコンピュータ15のプロセッサは、ステップS45の実行後、Y方向における指の接触位置を表すデータを取り込み(ステップS46)、取り込んだデータに連続して“1”(高レベル)になっている複数のビットが存在するか否かを判定する(ステップS47)。ステップS47において、上記複数のビットが存在しないと判定されたときは、プロセッサは後述するステップS66に移行する。ステップS47において、上記複数のビットが存在すると判定されたときは、プロセッサは変数Sを上記複数のビットの最下位ビットを表す値に設定し、変数Eを上記複数のビットの最上位ビットを表す値に設定し、変数Kを(E−S+1)に設定する(ステップS48)。
【0023】ステップS48の実行後、プロセッサは変数Kが2〜6の各々に等しいか否かを順次判定する(ステップS49〜S53)。ここで、Y方向における指の接触位置を表すデータを形成する16個のビットの各々に対応する位置の評価値をそれぞれY[1]〜Y[16]とする。ステップS49〜S53において、変数Kが2に等しいと判定されたときは、プロセッサはY[S]を4に設定し、Y[S+1]を4に設定する(ステップS54)。変数Kが3に等しいと判定されたときは、プロセッサはY[S]及びY[S+2]を4に設定し、Y[S+1]を8に設定する(ステップS55)。変数Kが4に等しいと判定されたときは、プロセッサはY[S]及びY[S+3]を2に設定し、Y[S+1]及びY[S+2]を4に設定する(ステップS56)。変数Kが5に等しいと判定されたときは、プロセッサはY[S]及びY[S+4]を2に設定し、Y[S+1]及びY[S+3]を4に設定し、Y[S+2]を8に設定する(ステップS57)。変数Kが6に等しいと判定されたときは、プロセッサはY[S]及びY[S+5]を1に設定し、Y[S+1]及びY[S+4]を2に設定し、Y[S+2]及びY[S+3]を4に設定する(ステップS58)。
【0024】変数Kが2〜6のいずれにも等しくないと判定されたとき又はステップS54〜S58のうちのいずれかの実行後、プロセッサはN及びMを1に設定し(ステップS59)、Nが16より大であるか否かを判定する(ステップS60)。ステップS60においてNが16より大であると判定されたときは、プロセッサはリセット信号fを送出し(ステップS66)、データ読取処理ルーチンの実行を終了する。ステップS60においてNが16より大でないと判定されたときは、プロセッサはMが16より大であるか否かを判定する(ステップS61)。ステップS61おいてMが16より大でないと判定されたときは、プロセッサはデータ[N][M]をX[N]×Y[M]とする(ステップS62)。
【0025】尚、データ[N][M]は、図1に示すタッチセンサパネル上の各位置の総合評価値である。ステップS62の実行後、プロセッサはMに1を加算し(ステップS63)、ステップS61に移行する。ステップS61おいてMが16より大であると判定されたときは、プロセッサはMを1に設定し(ステップS64)、Nに1を加算し(ステップS65)、ステップS60に移行する。
【0026】以上のデータ読取処理ルーチンによって、例えば第1信号線C12〜C14及び第2信号線L11〜L13に交流電圧が発生した場合には、X[12]=4、X[13]=8、X[14]=4となり、また、Y[11]=4、Y[12]=8、Y[13]=4となるので、図8に示すような総合評価値による接触分布が得られる。
【0027】ステップS5の実行後、プロセッサはデータ読取処理ルーチンによって得られたタッチセンサパネル上の各位置の総合評価値を示すデータをRAMの所定領域に転送する。そして、総合評価値が既に記憶されている場合には既に記憶されている値と新たに得られた値のうちの大なる一方を記憶する(ステップS6)。こののち、プロセッサは先頭フラグがオンか否かを判定する(ステップS7)。ステップS7において先頭フラグがオンであると判定されたときは、プロセッサは計数値(a) に1を加算し(ステップS8)、接触面の中心位置を先頭位置としてRAMに記憶する(ステップS9)。ステップS7において先頭フラグがオンでないと判定されたときは、プロセッサは接触面の中心位置の今回値と前回値との差をRAMに記憶する(ステップS10)。ステップS9又はS10の実行後、プロセッサは先頭フラグをオフにし(ステップS12)、ステップS2に移行する。
【0028】ステップS8によってカウントアップする計数値(a) は、文字の要素数をあらわす値であり、例えば“は”の要素数は3である。また、ステップS9又はS10において、接触面の中心位置は、(接触面の一端の位置に対応する値+接触面の他端の位置に対応する値)/2という式によって得られる値の小数点以下を切り捨てて得られる値に対応する位置である。すなわち、例えば第1信号線C12〜C14及び第2信号線L11〜L13に交流電圧が発生した場合には、X方向における接触面の中心位置は、(12+14)/2=13からC13に対応する位置であり、Y方向における接触面の中心位置は、(11+13)/2=12からL12に対応する位置となる。
【0029】ステップS3においてレディ信号dが存在しないと判定されたときは、プロセッサは計数値(b) に1を加算し(ステップS12)、計数値(b) がAより大であるか否かを判定する(ステップS13)。ステップS13において計数値(b) がAより大でないと判定されたときは、プロセッサは計数値(b) がBより大であるか否かを判定する(ステップS14)。ステップS14において計数値(b) がBより大であると判定されたときは、プロセッサは先頭フラグをオンにし(ステップS15)、ステップS2に移行する。ステップS14において計数値(b) がBより大でないと判定されたときは、プロセッサは直ちにステップS2に移行する。また、ステップS13において計数値(b) がAより大であると判定されたときは、プロセッサはタッチフラグがオンであるか否かを判定する(ステップS16)。
【0030】ステップS12によってカウントアップする計数値(b) は、ユーザの指がタッチセンサパネルに接触している時間を表す値であり、ステップS13及びS14においては(b) >Aであれば長時間指入力がなく一文字の入力が終了したとみなし、A>(b) >Bであれば一文字の中での要素間の移動があったとみなし、B>(b) であれば一瞬指が離れた場合でも継続して指が接触しているとみなしているのである。
【0031】以上のステップS1〜S15によって図9に示すような指の接触位置の中心の軌跡のパターン及び図10に示すような総合評価値による接触分布がRAMに記憶される。ステップS16においてタッチフラグがオンでないと判定されたときは、プロセッサはステップS1に移行する直前に実行していたルーチンの実行を再開する。ステップS16においてタッチフラグがオンであると判定されたときは、プロセッサはRAM内のアドレスを示すポインタと称される数値を初期設定して入力パターンの最初の要素が記憶されているアドレスに対応する値にし(ステップS17)、ROMに予め記憶されている全ての基準パターンの各々の先頭位置をポインタによって示されているアドレスに記憶されている入力パターンの先頭位置に合わせたときの基準パターンの終了位置及び移動方向を計算し(ステップS18)、ROMに予め記憶されている全ての基準パターンのうちのステップS18によって計算して得られた終了位置が入力パターンの終了位置に一致するパターンを選択して第1候補パターン群を形成し(ステップS19)、ROMに予め記憶されている全ての基準パターンのうちのステップS18によって計算して得られた移動方向が入力パターンの移動方向に一致するパターンを選択して第2候補パターン群を形成する(ステップS20)。こののち、プロセッサは第1候補パターン群及び第2候補パターン群の双方に属する基準パターンを選択して第3候補パターン群を形成し、第3候補パターン群の各々について入力パターンとのデータの重ね合わせ行って適合率を計算する(ステップS21)。
【0032】ステップS21において、入力パターンと基準パターンとの適合率は、両パターンの先頭位置の位置合わせを行った後に対応する位置同士の評価値を掛け合わせて得られた値の総和と基準パターンの各位置の評価値の2乗の総和との比である。すなわち、例えば“は”という文字の左の部分の入力パターンとして図11R>1(a)に示すような指の接触位置の中心の軌跡のパターンが得られた場合、この入力パターンと図11(b)に示すような基準パターンとの適合率は、〇印の評価値を8とすれば、8×8×6/8×8×9=67%である。尚、図11において破線は、対応する位置を示している。
【0033】また、接触分布を加味した場合、すなわち例えば“は”という文字の左の部分の入力パターンとして図12(a)に示すような接触分布が得られた場合、この入力パターンと図12(b)に示すような基準パターンとの適合率は、〇印の評価値を8とし、△印の評価値を4とすれば、89%となる。従って、接触分布を加味した方が判定率が向上するのである。尚、図12において破線、一点鎖線及び二点鎖線は、対応する位置を示している。
【0034】ステップS21の実行後、プロセッサは計数値(a) によって入力パターンの各要素全てについての基準パターンとの適合率の計算が終了したか否かを判定する(ステップS22)。ステップS22において入力パターンの各要素全てについての基準パターンとの適合率の計算が終了したと判定されたときは、プロセッサは第3候補パターン群のうちの適合率の最も高いものを選択して入力パターンを特定し(ステップS23)、ステップS1に移行する直前に実行していたルーチンの実行を再開する。ステップS22において入力パターンの各要素全てについての基準パターンとの適合率の計算が終了してないと判定されたときは、プロセッサは入力パターンの次の要素についての処理をなすべくRAM内のアドレスを示すポインタと称される値を入力パターンの次の要素に関するデータが記憶されているアドレスを示す値に変化させ(ステップS24)、ステップS18に移行する。
【0035】図13は、タッチセンサパネルの他の例を示す図である。同図において、16本の第1信号線C1 〜C16及び16本の第2信号線L1 〜L16は、図1と同様に配置されている。しかしながら、本例においては16本の第1信号線C1 〜C16の各々及び16本の第2信号線L1 〜L16の各々に接続されているタッチプレートPの形状は、半円形であり、第1信号線C1 〜C16の各々に接続されているタッチプレートPの直線部分と第2信号線L1 〜L16の各々に接続されているタッチプレートPの直線部分とが互いに対向するようにタッチプレートPの配置がなされている。かかる構成においても図1と同様の作用が働く。
【0036】尚、上記実施例においてはタッチセンサパネルは、電源誘導による方式のタッチセンサパネルであるとしたが、スキャン方式のタッチセンサパネルを使用することもでき、その場合には第1及び第2信号線のうちの一方にダイナミックエンコーダのドライブ出力を供給し、第1及び第2信号線のうちの他方に導出される信号をダイナミックエンコーダのセンサ入力とし、ダイナミックエンコーダのセンサ出力をマイクロコンピュータ15に供給すればよい。
【0037】
【発明の効果】以上詳述した如く本発明によるパターン入力装置によれば、検出面の面積が比較的小さい場合でも、ペン等の器具を使用せずにパターン入力が可能となり、操作性を良くすることができるのである。
【0038】また、本発明による他のパターン入力装置によれば、物体と検出面との接触面のほぼ中心からの距離に応じた重み付けがなされるので、例えば物体の描く入力パターンと基準パターンとの適合率の計算の精度を高くすることができ、物体の描くパターンの判別をより正確になすことができるのである。
【図面の簡単な説明】
【図1】本発明の実施例を示す回路図である。
【図2】本発明の実施例を示す回路ブロック図である。
【図3】図1及び図2に示す装置の各部の動作を示す波形図である。
【図4】図1及び図2に示す装置の動作を示すフロ―図である。
【図5】図1及び図2に示す装置の動作を示すフロ―図である。
【図6】図1及び図2に示す装置の動作を示すフロ―図である。
【図7】図1及び図2に示す装置の動作を示すフロ―図である。
【図8】接触分布を示す図である。
【図9】指の接触位置の中心の軌跡のパターンを示す図である。
【図10】接触分布図を示す図である。
【図11】入力パターンと基準パターンとの適合率の計算方法を示す図である。
【図12】入力パターンと基準パターンとの適合率の計算方法を示す図である。
【図13】他の実施例を示す回路図である。
【主要部分の符号の説明】
P……タッチプレート C1 〜C16……第1信号線
L1 〜L16……第2信号線 15……マイクロコンピュータ
【特許請求の範囲】
【請求項1】 同一の検出面上の座標に対応して配置されかつ物体が接触したとき検出信号をそれぞれ発生する複数の接触検出器と、前記複数の接触検出器のうちの互いに隣接する複数の接触検出器の各々から検出信号が出力されたとき、検出信号を出力した接触検出器の座標を以て接触領域とし、前記接触領域のほぼ中心に位置する点からの距離に応じた重みづけを行って得られる値を前記接触領域内の各座標と対応させて評価値を生成する手段と、前記評価値を順次記憶する記憶手段と、前記記憶手段に記憶された評価値を複数の所定パターンの各々と対応させて、前記所定パターン毎に前記記憶された評価値の適合率を計算する手段と、前記適合率に基づいて前記検出面に前記物体の接触によって描かれたパターンを判別するパターン判別手段と、からなるパターン入力装置。
【請求項2】 前記パターン特定手段は、前記記憶手段に最初に記憶された評価値の座標と、前記所定パターンの開始点に対応した座標との位置合わせを行い、対応する座標同士の評価値を掛け合わせて得られた値の総和と、前記所定パターンの各座標の評価値の2乗の総和との比を計算して前記適合率を求めることを特徴とする請求項1記載のパターン入力装置。
【請求項1】 同一の検出面上の座標に対応して配置されかつ物体が接触したとき検出信号をそれぞれ発生する複数の接触検出器と、前記複数の接触検出器のうちの互いに隣接する複数の接触検出器の各々から検出信号が出力されたとき、検出信号を出力した接触検出器の座標を以て接触領域とし、前記接触領域のほぼ中心に位置する点からの距離に応じた重みづけを行って得られる値を前記接触領域内の各座標と対応させて評価値を生成する手段と、前記評価値を順次記憶する記憶手段と、前記記憶手段に記憶された評価値を複数の所定パターンの各々と対応させて、前記所定パターン毎に前記記憶された評価値の適合率を計算する手段と、前記適合率に基づいて前記検出面に前記物体の接触によって描かれたパターンを判別するパターン判別手段と、からなるパターン入力装置。
【請求項2】 前記パターン特定手段は、前記記憶手段に最初に記憶された評価値の座標と、前記所定パターンの開始点に対応した座標との位置合わせを行い、対応する座標同士の評価値を掛け合わせて得られた値の総和と、前記所定パターンの各座標の評価値の2乗の総和との比を計算して前記適合率を求めることを特徴とする請求項1記載のパターン入力装置。
【図1】


【図2】
【図8】

【図9】
【図10】
【図11】
【図12】

【図3】

【図4】
【図5】

【図6】
【図7】
【図13】
【図2】
【図8】
【図9】
【図10】
【図11】
【図12】
【図3】
【図4】
【図5】
【図6】
【図7】
【図13】
【特許番号】特許第3171866号(P3171866)
【登録日】平成13年3月23日(2001.3.23)
【発行日】平成13年6月4日(2001.6.4)
【国際特許分類】
【出願番号】特願平3−43263
【出願日】平成3年3月8日(1991.3.8)
【公開番号】特開平4−280312
【公開日】平成4年10月6日(1992.10.6)
【審査請求日】平成10年2月23日(1998.2.23)
【出願人】(000005016)パイオニア株式会社 (3,620)
【参考文献】
【文献】特開 昭55−34735(JP,A)
【文献】特開 昭55−96411(JP,A)
【登録日】平成13年3月23日(2001.3.23)
【発行日】平成13年6月4日(2001.6.4)
【国際特許分類】
【出願日】平成3年3月8日(1991.3.8)
【公開番号】特開平4−280312
【公開日】平成4年10月6日(1992.10.6)
【審査請求日】平成10年2月23日(1998.2.23)
【出願人】(000005016)パイオニア株式会社 (3,620)
【参考文献】
【文献】特開 昭55−34735(JP,A)
【文献】特開 昭55−96411(JP,A)
[ Back to top ]