
パターン寸法計測方法及びその装置
【課題】
電子線照射に対する耐性が低い材料では,S/Nの良好な電子顕微鏡画像を得ることが難しい。これに対し,従来の画像平滑化処理を行うと,計測の安定性は向上するが,絶対値に対する計測誤差や感度が低下したり,立体形状情報の質が劣化したりという問題が生じる。
【解決手段】
計測対象パターンの寸法ばらつきを考慮して,信号波形が持つ立体形状情報を劣化させない画像平均化処理を行うことにより,計測安定性と精度および感度の向上を両立する。本発明により,高精度なパターン寸法および形状の計測と,それを用いた高感度な半導体製造プロセスの管理が実現できる。
電子線照射に対する耐性が低い材料では,S/Nの良好な電子顕微鏡画像を得ることが難しい。これに対し,従来の画像平滑化処理を行うと,計測の安定性は向上するが,絶対値に対する計測誤差や感度が低下したり,立体形状情報の質が劣化したりという問題が生じる。
【解決手段】
計測対象パターンの寸法ばらつきを考慮して,信号波形が持つ立体形状情報を劣化させない画像平均化処理を行うことにより,計測安定性と精度および感度の向上を両立する。本発明により,高精度なパターン寸法および形状の計測と,それを用いた高感度な半導体製造プロセスの管理が実現できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は半導体デバイスの製造工程においてウェハ上に形成された回路パターンの加工形状の寸法を,回路パターンの電子顕微鏡画像を用いて計測する方法及びそのシステムに関する。
【背景技術】
【0002】
半導体デバイスの製造工程において,基板であるウェハ上に多層に形成されるパターンの寸法および形状は,その半導体デバイスの性能を決める重要な要因のひとつである。中でもトランジスタゲート配線をはじめとする配線パターンは,その配線幅および形状とデバイス動作特性に強い関連があり,所望の配線形状を実現する製造プロセスを構築することが非常に重要である。
【0003】
一般な半導体デバイスのパターンは露光技術を用いて生成される。対象となる材料の上に感光性有機材料(フォトレジストと呼ばれる)などの膜を生成し,所望のパターンを露光・現像し,生成されたフォトレジストパターンをマスクとしてターゲット材料のエッチングを行うことで微細なパターンを形成する。
【0004】
半導体デバイスの製造ラインにおいては,この露光・現像後のフォトレジストパターンあるいはエッチング後のパターンの寸法を測長SEMなどを用いて計測,管理することが一般的に行われている。数十ナノメートルオーダの微細配線の線幅を測定する測長ツールとしては,それらの配線を10万倍を超える拡大倍率で撮像可能な線幅測定用の走査型電子顕微鏡(測長SEM(Scanning Electron Microscope)またはCD(Critical dimension)SEM)が従来から用いられている。非特許文献1に示されているように,測長SEMによる計測に対しては高い再現性と計測の確からしさが要求されている。電子顕微鏡画像(以下、SEM画像と記す)を用いて精度のよい計測を行うためには,コントラストが高くノイズの少ない,質のよい画像を用いることが効果的である。
【0005】
一方,非特許文献2に示されるように,ArFレジストやLow-k材のように,近年の半導体製造プロセスで一般的に用いられている材料の中には電子線照射に対して耐性の低いものも多い。このような材料からなるパターンを計測する場合には,計測対象パターンへのダメージを低減するために電子線の照射量はできるだけ少なくおさえることが望ましい。このような材料の計測においては,S/Nのよい良質な画像を用いることは一般に難しい。このため,このようなサンプルに対しては,画像の平滑化などの処理を行うことで,ノイズの影響を低減し,計測の再現性向上をはかっている。
【0006】
また、非特許文献3には、パターン形状と波形の関係に着目して,パターンの断面形状を考慮した寸法計測方法が開示されている。すなわち,パターン断面形状とSEM信号波形の関係を予めモンテカルロシミュレーションにより計算し,ライブラリとして保存しておき,計測時には実際のSEM画像と最も一致する波形データをライブラリ中から選択することにより,パターンの断面形状とそれを考慮した高精度な寸法計測を実現ことが開示されている。
【0007】
更に、非特許文献5には、得られた波形からパターン形状に依存して変化する画像特徴量を算出する場合に画像特徴量として選択する箇所の例として、SEM画像信号のボトム、トップ、信号ピーク間隔などのCD値を求める例が示されている。
【0008】
【非特許文献1】International Technology Roadmap for Semiconductors 2005 Edition, Metrology (http://www.itrs.net/)
【非特許文献2】A. Habermas, D. Hong, M. Ross, W. Livesay, “193nm CD Shrinkage under SEM: Modeling the Mechanism” Proc. SPIE 4689, pp. 92-101 (2002).
【非特許文献3】J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Scanning electron microscope analog of scatterometry,”Proc. SPIE 4689, pp. 304-312 (2002)
【非特許文献4】J. S. Villarrubia, A. E. Vladar, M. T. Postek, “A simulation study of repeatability and bias in the CD-SEM,” Proc. SPIE 5038, pp. 138-149, 2003.
【非特許文献5】Chie Shishido, Ryo Nakagaki , Maki Tanaka, Yuji Takagi, Hidetoshi Morokuma, Osamu Komuro, and Hiroyoshi Mori, “Dose and focus estimation using top-down SEM images,” Proc. SPIE 5038, pp. 1071-1079 (2003)
【非特許文献6】Atsuko Yamaguchi, Hiroshi Fukuda, Hiroki Kawada, and Takashi Iizumi, ”Impact of Long-Period Line-Edge Roughness (LER) on Accuracy in CD Measurement,” Proc. SPIE 5752, pp. 1362-1370 (2005)
【特許文献1】特開2003−173948号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
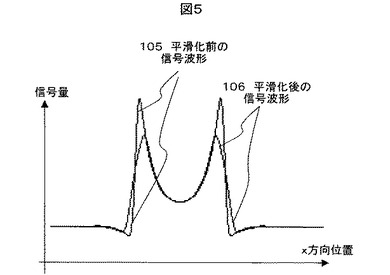
背景技術に示されているように,電子顕微鏡画像を用いた計測では,パターンへのダメージ低減のために電子の照射量を低減し,この電子照射量低減による画像のS/N低下の影響を平滑化のような画像処理手段により低減することで,計測の再現性も確保している。しかしながら,平滑化のような画像処理手段を用いると,ノイズの影響を低減できる一方でパターンの持つ形状あるいは寸法の情報が劣化してしまう。図4および図5は平滑化処理による波形情報の劣化の例であり,元々のSEM画像の波形が平滑化処理により大きく変化していることがわかる。
【0010】
また,露光技術を用いて形成される半導体パターンは,非特許文献5に示されているように,ラインエッジラフネス(Line edge roughness, LER)や線幅ラフネス(Line width roughness, LWR)とよばれるパターンエッジ位置および寸法の変動を持つことが知られている。このため,図5に示すようなラインの長手方向の平均処理を行うと,このラフネスの影響によりSEM画像の信号波形が変形してしまうため,画像処理によるS/N低減を行うのは困難である。
【0011】
一方,非特許文献3、非特許文献4および非特許文献5に示されているように,SEM画像波形は対象パターンの形状により変化する。非特許文献3および非特許文献4ではこのような形状の違いに着目して,計測対象パターンの断面形状の情報を取得したり,これらの形状を考慮した高精度な計測を実現したりしている。しかしながら、非特許文献4においては、パターンの断面形状を考慮した寸法計測方法においても,計測対象画像のS/Nが悪い場合には再現性が低下することが記載されている。
【0012】
これに対し,平滑化は再現性向上には効果的な処理であるが,図4あるいは図5に示したような平滑化処理により生じる波形の変化は,パターン形状情報を劣化させてしまうため,このような画像を用いたのでは,パターンの断面形状を考慮した高精度な計測を実現することはできず,パターンの微細化に伴う計測高精度化への要求に見合う高精度な計測を実現することが困難となっている。
本発明が解決しようとする課題は,S/Nの悪い画像においても,元々のパターンの持つ形状および寸法の情報を劣化させることなくノイズの影響を低減し,高精度な電子顕微鏡画像(SEM画像)によるパターン寸法計測を実現することにある。S/Nの悪い画像においても,パターンのもつ形状および寸法の情報を得ることが可能になれば,パターンへのダメージを生じることなく,高精度な寸法の計測が実現可能となる。
【課題を解決するための手段】
【0013】
本発明では上記した課題を解決するために,パターンのラフネスによるエッジの位置ずれ量を算出し,各信号波形のエッジ位置ずれを補正した後に平均することで,エッジ部分の波形形状情報を維持したまま平均的な位置におけるノイズの少ない平均波形を生成する。この平均波形を用いて計測することで高精度な計測を実現するようにした。
【発明の効果】
【0014】
本発明により,パターンのダメージを防ぎ,かつ短時間に高精度な測長SEM計測の実現が可能となる。S/Nの悪い画像であっても,パターンの立体形状情報を高感度に検出することが可能となるため,本発明を用いたパターン計測結果により,パターンの形状変化などの半導体プロセスの状態の管理あるいは制御が可能となるといった効果もある。また,低S/Nの画像でも計測ができるということは,画像取得に要する時間の短縮が可能になり,パターン寸法計測のスループット向上の効果も得られる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明を実施するための最良の形態を実施例を用いて説明する。
【実施例1】
【0016】
第1の実施例として,本発明のパターン計測方法の基本的な電子顕微鏡画像処理手順を図1から図3を用いて説明する。
【0017】
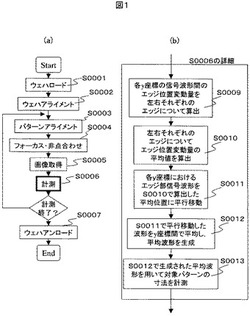
図1(a)は本発明のパターン計測方法における測長SEMを用いた計測の実施手順の一例を示している。図1(b)は図1(a)のステップS0006の詳細を説明したものである。
【0018】
図1(a)に示す手順により実際の計測を実施する。はじめに,通常の測長SEM計測と同様にウェハを装置にロード(S0001)し,ウェハアライメント(S0002)によりウェハ上パターンの位置を校正する。次に計測対象パターンの近くにステージを移動し,予め設定しておいた近傍のパターンを用いて正確な位置決め(S0003)およびフォーカス・非点合わせ(S0004)による像質の調整を行う。その後,計測対象パターンの画像を取得(S0005)し,計測を実行する(S0006)。
【0019】
図1(a)は画像取得直後に計測を実施する例であるが,画像だけを取得しておいて計測は別途行ってもよい。その場合には,図1(a)の計測ステップS0006の代わりに画像記録(図示せず)あるいは画像転送(図示せず)を行い,画像データを記録媒体に記録しておいて,別途計測処理を実施すればよい。同一ウェハ上で複数のパターンを計測する場合は,図1(a)に示すように,ステップS0003からステップS0006を繰り返して,全てのパターンに対して計測あるいは画像取得を実行する。画像取得が終了したらウェハをアンロード(S0007)する。
【0020】
図1(b)は本発明における画像処理手順の実施形態の一例であり,図1(a)のステップS0006の詳細を説明したものである。計測対象パターンの画像を取得した後,計測対象のSEM画像内において,各Y座標間のエッジ位置の相対的な変動量を左右それぞれのエッジごとに算出する(S0009)。次に,S0009で算出したエッジ位置の変動量の平均値を左右それぞれのエッジについて算出する(S0010)。次に,各Y座標におけるSEM画像信号を,S0010で算出した平均エッジ位置からのずれ量分だけ平行移動させて,S0010で算出した平均エッジ位置に移動させた波形を生成する(S0011)。次に,生成された平均エッジ位置に平行移動された波形をY方向の波形間で平均し,平均波形(詳細は後述)を生成する(S0012)。
【0021】
次に,このようにして得られた平均波形に対してエッジ位置検出処理を行い,取得SEM画像内における平均波形のパターン左右のエッジ位置を算出し,これらの差分から計測対象パターンの平均寸法を算出する(S0013)。
【0022】
非特許文献5に示されているように,パターンのエッジ位置は比較的狭い範囲においても数ナノメートル変化する恐れがある。これに対し,発明者らの検討によると,一般的な半導体製造プロセスでは,同じパターンの同じエッジ内におけるパターン側壁の形状変化はエッジ位置の変動に比べると小さいことがわかっている。このように,側壁の形状変動が小さい場合には,図1(b)に示す手順によりあらかじめエッジ位置の変動を考慮しておけば,平均処理によりノイズ低減の効果は得られるが,波形の形状変化は十分小さく,SEM波形に影響を与えることなく安定な計測が可能となる。
【0023】
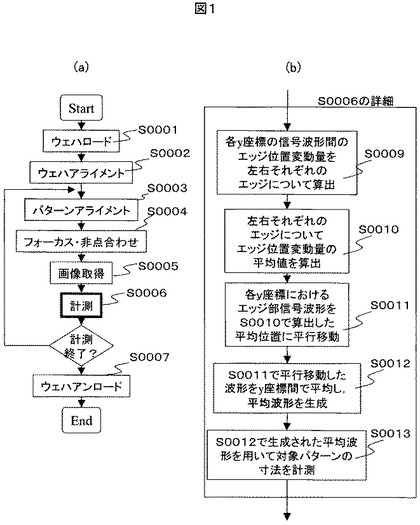
図2に図1で示した手順の概念図を示す。図2(a)は計測対象であるラインパターン400を平面的に見たときの模式図であり,測長SEMでは通常図2と同じ方向から撮像された2次元の画像を用いて計測を行う。図2に示すように,ラインパターン寸法はばらつきを持っており,y座標によってそのエッジの位置(ラインエッジラフネス:LER)および寸法(線幅ラフネス:LWR)が変化する。このため,図2に示すように,異なるy座標(A,B,C)においてエッジ部分の波形はエッジ位置変動に応じてx方向にシフトしたような波形となる(実際には対象形状の微妙な違いやノイズにより波形形状も変化する)。図2(b)の従来技術では,このラフネスを考慮することなく,同じx座標の波形どうしの信号量を平均することによりノイズ低減をはかっている。
【0024】
図2(b)に従来技術を示す。図2(b)に示すように,座標A,B,Cにおいてはエッジの位置が異なるため,信号波形のピークの位置も変化する。例えばy座標Aにおける信号波形103とy座標Bにおける信号波形104は同様の形状を持つが,そのx方向の位置は異なっている。このような信号波形に対し,従来技術では,例えばy座標A,B,Cの同じx座標の信号量Sa, Sb, Scを平均してSavgを算出,同様に全てのx座標について平均値をとることにより,平均の効果によりノイズを低減する(以降,本処理をライン加算と呼ぶ)。これに対し図1(b)で説明した本発明による計測方法では,図2(c)に示すように,予め各y座標の画像間のx方向位置ずれ量を算出し,そのずれを修正して位置を合せた後に平均(ライン加算)処理を行う。
【0025】
図2(c)に示す112は,元の信号波形(103,104など)を位置ずれ量の算出結果に基づき,x方向に移動させた位置合わせ後の信号波形である(実際にはノイズや微妙なパターンの断面形状の違いにより103,104の波形は異なるため,座標A,B,Cの波形は位置合わせを行っても完全に同じものにはならない)。本発明の位置合わせ処理を行うことによって,元々の波形が持っていた対象パターン形状の情報の劣化を抑えることができる。図2(c)の位置合わせ後のライン加算信号は,位置ずれ量の平均値に合せて加算処理を行うため,それぞれのエッジについて,平均的な形状の波形が平均的な位置に配置されたものが生成されることになる。本明細書ではこれを平均波形(S0012参照)と呼ぶ。
【0026】
x方向の位置ずれ量の算出は一般的な位置ずれ量算出手法を用いればよい。例えば,基準となる波形を選択し,基準波形をテンプレートとして,対象のy座標の波形との相関をx方向の位置をずらして計算し,最も相関の高い場所を選べばよい。画像のS/Nが非常に悪い場合には,この位置ずれ量の算出においても信頼できる結果を得ることは難しくなる。そこで,図1(b)に示した処理フローにおいてS0012が終わったあと,S0012で算出した平均波形をテンプレートとして,もう一度エッジ位置変動量を算出してS0009からS0012までをもう一度繰り返すと(図示せず),位置ずれ量検出の精度が向上し,さらに安定な計測が可能となる。S/Nが非常に悪い画像に対して信頼性の高い位置合わせを実現する他の方法については第1から第4の変形例で説明する。
【0027】
図3に画像を取得するのに用いる一般的な測長SEMの構成を示す。電子光学系200において,電子銃201から放出された一次電子ビーム303はアライメントコイル208,コンデンサレンズ202,非点補正コイル209,対物レンズ203および対物レンズ絞り210によって集束され,微小スポットとして試料100上に照射される。電子ビームが照射されると,照射された部分から試料100の材質や形状に応じた二次電子や反射電子が発生する。偏光器204,205を用いて1次電子ビーム303を二次元走査し,発生する二次電子を二次電子検出器206で検出し電気信号に変換し,さらにA/D変換器207でデジタル信号に変換することによって,二次元のデジタル画像としての二次電子線像が得られる。なお,半導体プロセスにおける寸法計測には,(反射電子線像ではなく)2次電子線像が用いられるのが一般的である。以下,単に電子線像あるいはSEM画像と表現した場合には2次電子線像を指すものとする。
【0028】
得られた画像は記憶媒体301に記憶され,画像処理部300で処理される。あるいは外部インターフェース020を通じて,一旦外部に設けた画像データベース(図示せず)に保存された後,あるいは直接外部に設けた画像処理ユニット(図示せず)に送られて処理を行っても良い。装置の操作や結果表示は表示装置302を通じて行われる。(図3の中で、200,208,209,210の記載なし←上のパラグラフに追加しました。)
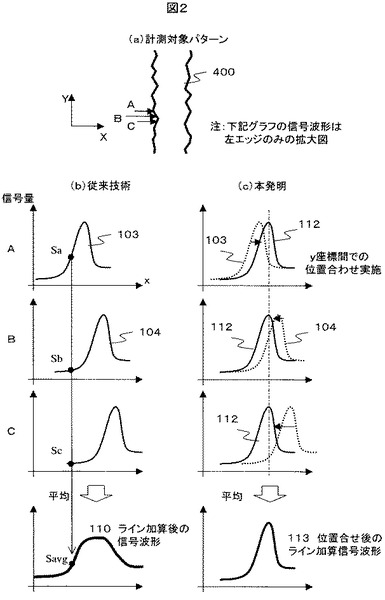
次に図4(a)乃至(d)を用いて,本発明が解決する課題と本発明における画像処理内容の詳細を説明する。図4(a)乃至(d)に示す画像および波形はシミュレーションにより生成したものであり,画像の上下方向(y方向)に長い配線パターンのSEM画像を表わしている。図4(a)(c)では,平らな下地部分401の上にある高さを持ったラインパターン400がある場合のSEM画像の例を示している。
【0029】
図4(a),(c)に示すように,配線パターンにおいては,ラインパターン部400のエッジ部分が他の平らな部分(下地部401およびパターンの上部,つまり信号波形の二つのピークの間の部分)に比べ明るく光るため,この信号量の変化を利用して画像処理によりパターンエッジの位置を検出する。図4(a)はノイズもラフネスも無い理想的な場合の測長SEM画像100である。一方,図4(c)は実際の測長SEMを用いた計測対象画像を模擬したものであり,パターンにはラフネス(LERおよびLWR)がある場合の測長SEM画像102を示している。また,図4(c)の画像に対応する図4(d)の信号波形(103および104,103)は図4(a)の画像に対応する図4(b)の信号波形101と同じであるが,画像信号はノイズにより劣化しており,波形が大きく変化していることがわかる。
【0030】
SEM画像のノイズを低減するためには、SEM画像を取得する時に試料に照射して走査する1次電子ビームのビーム電流量を大きくすること、1次電子ビームを走査する速度を遅くして試料上の単位面積あたりの照射時間を増やすこと、または加算フレーム数(ある領域に集束させた電子ビームを照射して走査することにより1フレーム分の画像を得ることを複数回繰返し、得られた複数のフレーム分の画像信号を積算する処理)の増加が効果的である。しかし、電子線照射に対する耐性の低い材料のSEM画像を取得する場合に上記したような方法を適用するのは難しく、ノイズの多い画像での処理が必要となる。
【0031】
図4(c)に示したノイズは,電子線照射がパターンに与えるダメージを低減するために電子線照射量を少なくしているために生じているものであり,実際の測長SEMにおいて起こりうるものに近い条件のものである。なお,図4(d)において,測長SEM信号波形103と104は,ラフネスによりピークの位置が変化したことに加え,画像が取得される際のノイズがランダムに変化しているため,元々のピーク部分の形状は全く同じものであるにも関わらず,全く異なる波形となっている。
【0032】
従来のパターン寸法計測手法では,例えば図4(b)の信号波形に図示しているように,パターンエッジに対応する波形ピークの信号量と下地部分の信号量を基準として,これらの差の一定の割合(図4(b)の場合は50%)となる点をエッジ位置として,左右のエッジ位置を算出し,それらの差分によりパターン寸法を計測している(以下,しきい値法と呼ぶ)。
しかしながら,図4(d)に示すように,ダメージを受けやすい材料のパターンにおいては,電子線の照射量を少なくするために信号波形がノイズにより劣化してしまい,その結果しきい値法などでは安定な計測を行うことが困難になってしまう。これに対し,従来の計測手法では画像処理によるノイズ除去処理を行って安定な計測を実現している。
【0033】
図5および図6は従来の測長SEM計測におけるノイズ除去処理の例と計測における課題を示している。図5は平滑化フィルタ処理の例であり,平滑化前の信号波形105に対して,平滑化後の信号波形106は波形の形状もエッジ部ピークの信号量も変化していることから,同じ方法でエッジ位置検出処理を行ったとしても,平滑化前と平滑化後では,検出されるエッジ位置が同じになるとは限らないことがわかる。なお,波形変形の影響を明確にするためにノイズのないシミュレーション画像で説明しているが,実際には信号波形には図4(b)に示したようなノイズが含まれている。平滑化処理により高周波成分を除去することによりノイズの影響が低減され計測は安定になるが,上記の通り,計測値が平滑化前のものと同じになるとは限らない。
【0034】
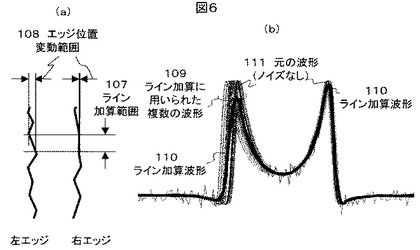
図6は図2で示した従来技術のライン加算と呼ばれる処理であり,配線パターン画像がy方向と平行である事を利用して,y方向の異なる位置の画像信号を平均して,ノイズを除去する方法である。この方法は図4(a)に示した画像のように対象パターンにラフネスがなければ,ノイズ除去には有効な方法であるが,図4(b)に示したようにラフネスがある場合には正しい結果が得られない場合がある。図6はあるy座標の範囲107で図6(b)に示すような複数の信号波形109を平均化した例である。図6(a)の模式図に示した例では,波形平均範囲内におけるエッジ位置の変動範囲108が左右のエッジで異なる。右側のエッジはエッジ変動量が少ないため,波形を平均しても元の波形と形状はあまり変わらない。
【0035】
一方,左側のエッジでは,位置ずれ量の大きい波形の平均をとってしまうため,図6(b)に示すようにライン加算により得られる波形110がライン加算前の信号波形111と大きく異なってしまう。このため,図5の平滑化の例と同様に,ライン加算処理を行うと計測値がライン加算前のものと同じになるとは限らないという問題がある。なお,図5に示した平滑化の例においても,2次元のフィルタ処理を行うと,エッジ部分のラフネスによって平滑化の結果が変化してしまうため,場所によってフィルタの影響が安定しなくなってしまう。
【0036】
これに対し,本発明の平均波形生成処理は対象の側壁形状情報を維持したままノイズの低減が可能となる。例えば,y方向の画素数100画素分のSEM画像データを用いる場合はノイズは画素数の平方根の逆数,つまり約十分の一に低減することが可能となる。これは,統計的な効果によるもので,例えば正規分布に従う母集団から無作為にn個のデータを抽出した場合,n個のデータの平均値の分布は母集団の標準偏差をnの平方根で除した標準偏差を持つ正規分布となる。これと同様に,SEM画像の信号量におけるノイズはランダムなものであり,平均に用いる画素数が増えれば,それに応じたノイズ低減の効果が期待できる。
【0037】
なお,第1の実施例では1枚の画像内における異なるy座標の波形を用いて平均波形を算出する例を示したが,使用する画像は必ずしも一枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
【0038】
図5および図6に示したように,従来技術のノイズ除去処理方法は、もともとの信号波形を変化させてしまうため,計測結果は安定になるかもしれないが,パターン形状や寸法の変動に対する感度は低下する恐れがある。特に,エッジ部波形のピーク形状が横方向に広がってしまうため,実際の寸法よりも計測結果が大きくなってしまう。
【0039】
これに対し,図1に示した本発明による平均波形の生成とそれを用いたパターン寸法計測あるいはパターン立体形状情報の推定を行えば,従来の平滑化処理により生じていた問題を解決することが可能となる。すなわち、本発明によるサンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行なうことにより生じてしまう本来のパターンに由来するものではない寸法変動成分を低減し,高精度で高感度な計測を安定に行うことが可能となる。このため,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定した計測を実現することが可能となる。
【0040】
図3ではSEMの2次電子画像を用いるシステムについて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【0041】
[第1の実施例の変形例1]
第1の実施例で示したように,対象パターンのラフネスを考慮した平均波形を生成することにより高精度かつ高感度なパターン寸法計測が可能となるが,画像のS/Nが非常に悪い場合には,ラフネスによる位置ずれ計測がうまくいかない場合がある。第1の実施例の変形例1の実施例では図12を使って,この位置あわせ処理を高精度化する方法について説明する。
【0042】
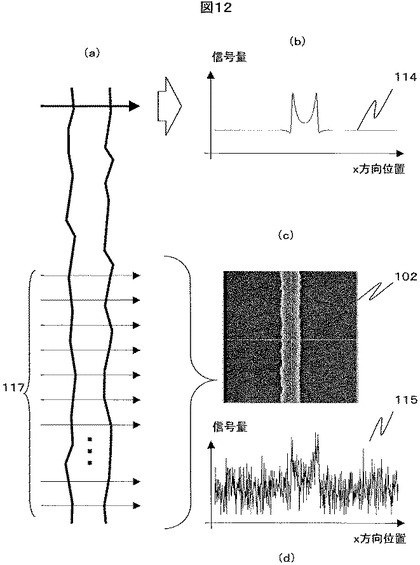
変形例1では,エッジ部分の信号波形間の位置ずれを算出する場合に,S/Nのよいテンプレートを用いることで位置ずれ量検出の精度向上を実現する。図12(a)は計測対象パターンと電子ビームスキャン位置の関係の模式図である。図12(c)は通常のSEM画像取得の電子ビームスキャン位置117をスキャンして得られるSEM画像102、図12(d)はSEM画像102の波形信号115である。通常は,図12(c)に示すように,y方向に一定間隔のピッチでビームをスキャンすることにより2次元の画像信号を得ている。各y座標におけるスキャンは1回とは限らず,複数回のスキャンの結果を平均することも一般的に行われている。これまでの説明にもあったように,電子線照射に対して耐性のないサンプルでは,この照射電子量(電流量やスキャン回数,スキャン速度などで調整する)をできるだけ少なくするために,図12(d)に示すように信号波形115のS/Nが非常に悪くなる。
【0043】
そこで,本変形例1では,通常の画像内におけるエッジ位置の移動量を推定するために,計測位置とは別の場所で,通常より多めの電子を照射して,比較的S/Nのよい信号波形を取得し,これをテンプレートとして利用する。例えば,図12(b)に示すように,同じ場所で通常よりも多い回数のスキャンを行い,その平均波形を得ることができれば,この多数回スキャンして積算した信号波形114は通常スキャンの波形115に比べてS/Nがよくなる。電子の照射量が多くなるとダメージも多くなるが,非常に狭い範囲に限定すれば2次元に広い範囲で照射するのと比べて,その影響は十分小さく抑えられるので,図12に示すように,計測対象領域と同じエッジ上で,y方向の距離が離れたところで,ダメージが問題ない範囲でできるだけ多くのスキャンを行い平均信号波形を生成すればよい。
【0044】
このようにして,通常スキャンよりもS/Nの良い信号波形が一つ得られれば,この波形データから得られるエッジ部波形をテンプレートとして,x座標をずらした際の計測対象波形との相関値を用いて,計測対象画像の各y座標の左右それぞれのエッジ位置ずれ量を算出すればよい。このようにS/Nのよいテンプレートを用いれば,115のようにS/Nの悪い画像同士で行うよりもずっと安定な位置ずれ量検出が可能となる。
【0045】
なお,図12(a)では便宜的に電子ビームのスキャン方向を左から右として説明したが,特に同方向に限定するものではない。特に,通常画像については,同様の2次元画像が得られれば,スキャン方向はどの方向でもよい。また,多数スキャン信号波形取得位置と通常の計測位置の関係についても,同じエッジ上で同様の条件(周囲のパターン密度など)で形成されているパターンの範囲内であれば,特に図12に限定されるものではない。
【0046】
本変形例1を用いることにより,第1の実施例における平均波形生成処理がより高精度に行えるため,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。
【0047】
[第1の実施例の変形例2]
変形例2では図13および図14を使って,変形例1の場合と同様に,ラフネスを考慮したエッジの位置あわせ処理を高精度化する別の方法について説明する。
【0048】
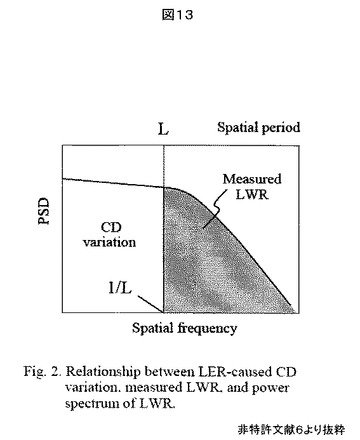
変形例2では,エッジ部分の信号波形間の位置ずれを算出する場合に,S/Nのよい信号波形を別途生成して位置合わせ用のテンプレートとした。図14に示す第1の実施例の変形例2では,波形形状に影響を与えない範囲で事前にライン加算を行う。図13は非特許文献6に開示されている一般的な半導体ラインパターン配線幅ばらつきのもつ周波数特性である。図13からわかるように,配線幅のばらつきは低周波領域では比較的大きな振幅をもつが,高周波領域では急激に振幅が小さくなる。これは,配線幅ばらつきの振幅が十分に小さくなる範囲の周波数に相当する距離にある配線のエッジは低周波の影響をより大きく受けるため,比較的近くに位置する,すなわち急激に線幅は変動しないということが言える。
【0049】
この現象を利用すれば,図13のLに相当する距離よりも十分に近い距離にあるエッジ同士の波形であれば,図6に示した加算処理を行っても,波形形状に与える影響は十分に小さく抑えることができる。図13のLの一般的な値についても非特許文献6に開示されている。周波数LはL=3(1/μm),すなわち波長333nmであるからmを整数として, 333/m nm以下のピッチで波形信号をサンプリングすれば,m本の加算処理を行っても,加算される波形間のエッジ位置変動量は十分に小さいので,エッジの位置およびエッジ部波形形状の情報は維持される。
【0050】
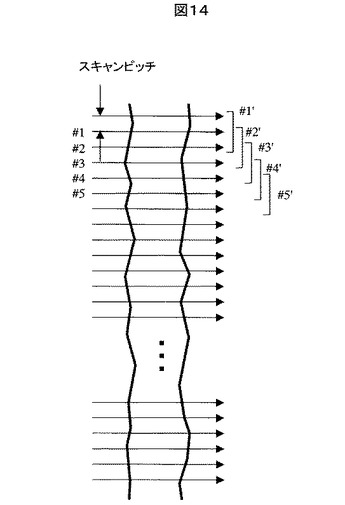
そこで,図14に示すように,得られた信号波形のm本(図14ではm=3)のライン加算処理を事前に行うことで,電子線照射量を増加することなく,信号波形のS/Nが向上し,第1の実施例で開示されている平均波形生成のための位置合わせの精度を向上することが可能となる。
【0051】
なお,図14では便宜的に電子ビームのスキャン方向を左から右として説明したが,特に同方向に限定するものではない。特に,通常画像については,同様の2次元画像が得られれば,スキャン方向はどの方向でもよい。また,多数スキャン信号波形取得位置と通常の計測位置の関係についても,同じエッジ上で同様の条件(周囲のパターン密度など)で形成されているパターンの範囲内であれば,特に図14の順に限定されるものではない。
【0052】
本変形例2を用いることにより,第1の実施例における平均波形生成処理がより高精度に行えるため,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。
【0053】
[第1の実施例の変形例3]
変形例3では図15および図16を使って,変形例1および変形例2と同様に,ラフネスを考慮したエッジの位置あわせ処理を高精度化する別の方法について説明する。
【0054】
図15および図16に示す第1の実施例の変形例3では,エッジ位置ずれ量算出の前に平滑化フィルタを適用することでノイズの影響を低減する。図5で示したように,画像の平滑化処理は信号波形を変形させてしまうため,計測用画像への適用には注意が必要だが,位置ずれ量の算出時には位置ずれ量を比較する波形の両方に同じ平滑化処理が適用されていれば,特に問題は生じない。
【0055】
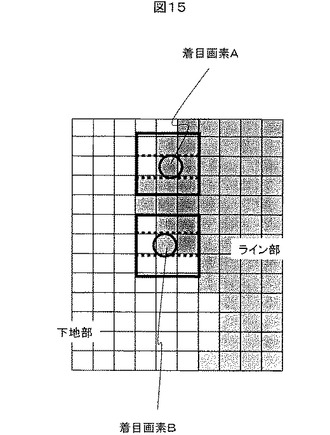
図15はパターンエッジ部分におけるエッジ位置を画像の画素との関係がわかるように示したものである。右側の灰色の部分がラインパターン(ライン部),左側の白色の部分が下地部分をあらわしている。図15の中に示されている着目画素A,B二つの画素に着目すると,A,Bともにパターンのエッジ部分に相当しているが,周辺のエッジ位置の関係は異なる。
【0056】
このような位置関係で画像を取得した場合に,得られた画像に,例えば3x3画素の平滑化フィルタを適用することを考えると,画素Aの周辺9画素はライン部分を多く含むのに対して,Bの周辺9画素は下地部をより多く含む。このため,画像平滑化を行った後では,画素Aは実際よりよりラインが太くなる方向に,画素Bは実際よりラインが細くなる報告に画像内での見た目のエッジ位置がそれぞれシフトしてしまう。このため,従来の2次元の平滑化処理を行うと,エッジ位置が等しいはずの画素A,B間でエッジ位置ずれ量を算出すると正しい答えが得られなくなってしまう。
【0057】
そこで,本変形例3では,図15に点線で示しているように,着目画素と同じy座標の画像信号のみを使って平滑化処理を行う。そうすれば,画素A,Bともに同様の信号波形に同じフィルタを適用することになるため,波形は元のものから変化してしまうが,エッジ位置ずれ量算出には悪影響は与えない。
【0058】
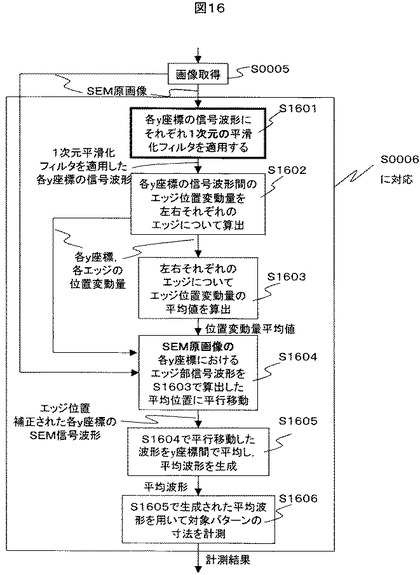
そこで本変形例3では,図16に示すように,原画像の信号波形ではなく,1次元の平滑化フィルタを適用してノイズ除去を行った各y座標のSEM信号波形を用いてエッジ位置変動量を算出する。図16は、図1(a)で説明した処理手順と異なる部分を説明するもので、図1(a)のうち、S0005で取得した画像からパターンの寸法を計測するステップ、すなわち図1(a)のS0006に対応する手順を詳細に説明する図である。図16では図1で説明した処理手順との違いを明確にするため,図1(a)に対応する処理手順に加え,図1(b)に対応するデータの流れも合せて示している。
【0059】
第1の実施例と最も異なるのは,S0005で取得したSEM画像に対して,エッジ位置変動量を算出するステップ(S1602)の前に,各y座標の信号波形にそれぞれ1次元の平滑化フィルタを適用するステップ(S1601)が加わる点である。
【0060】
すなわち、S1601で各y座標の信号波形にそれぞれ1次元の平滑化フィルタを適用してノイズ除去を行った後に、S1602でこのノイズ除去を行った信号波形を用いてエッジ位置変動量を算出し、算出されたエッジ位置変動量の平均値を計算し(S1603),各y座標における信号波形内のエッジ部の平均位置からの変動量を用いて,S1601で平滑化した信号波形ではなく,S0005で取得した原画像の信号波形を平行移動し(S1604),それらの信号波形を平均することにより平均波形を生成する(S1605)。
【0061】
この処理によって,パターン寸法計測や形状情報抽出に用いる信号波形は劣化することなく,平均的な位置における平均波形を算出することが可能となる。このようにして得られた平均波形を用いてパターンの寸法計測を行う(S1606)。
【0062】
このように,1次元の平滑化フィルタを適用してノイズ除去を行った各y座標のSEM信号波形を用いてエッジ位置変動量を算出することで,第1の実施例に比べ,安定で高精度な平均波形を生成することが可能となる。ひいては,本実施例を用いることにより,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。図16では第一の実施例を高精度化する方法について説明したが,S1606の寸法計測の代わりに、第2の実施例として後述する立体形状を考慮した寸法計測および立体形状推定や,第3の実施例として後述する画像特徴量を利用した半導体製造プロセス評価などに利用してももちろんよい。
【0063】
また,変形例1乃至変形例3で説明した実施例は互いに相反するものではなく,同時にこれらを組合わせて用いてもよいことは言うまでもない。また、変形例1と変形例3とを同時に用いる場合には,テンプレートとなる波形にも計測対象画像と同じ1次元フィルタを適用することが重要である。
【0064】
また,本変形例3を実施例1の説明した位置合せ処理に適用することで,電子線照射量を増加することなく,位置ずれ量検出に用いる信号波形のS/Nを向上させることができ,第1の実施例で説明した平均波形生成のための位置合わせの精度を向上させることが可能となる。
【0065】
[第1の実施例の変形例4](位置調整後の平均波形を用いてLER/LWR計測+GUI)
次に,変形例4として,第1の実施例で説明したパターン寸法計測を応用して,平均寸法のみならず各y座標の寸法およびエッジ位置の変動を高精度に推定する方法について図18を用いて説明する。
【0066】
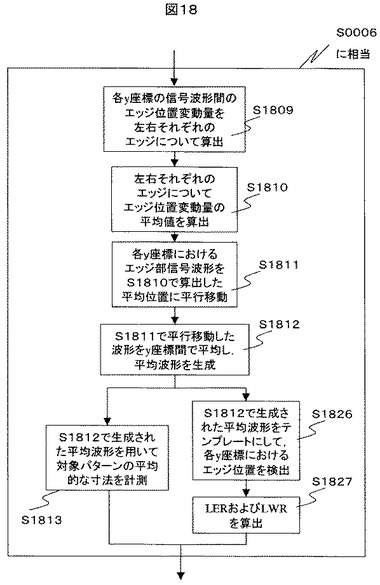
第1の実施例で示したように,算出される平均波形はパターンエッジの波形情報を維持したまま,処理に用いたSEM画像の平均的な位置のエッジ波形をノイズの少ない状態で得られる。そこで,得られた平均波形のエッジ部波形をテンプレートとして,原画像内の各y座標のエッジ位置ずれ量算出(S1826)とその結果を用いたLERやLWR計測(S1827)を行えば,安定なLERやLWRを安定して計測することが可能となる。
【0067】
すなわち、図18にその処理フローを示したように、S1809で各y座標の信号波形のエッジ位置変動量を算出し、算出されたエッジ位置変動量の平均値を計算し(S1810),エッジ部波形信号を算出した平均位置に平行移動し(S1811),それらの信号波形を平均することにより平均波形を生成し(S1812)、この平均波形を用いてパターンの寸法計測を行う(S1813)。
【0068】
一方、得られた平均波形のエッジ部波形をテンプレートとして,原画像内の各y座標のエッジ位置ずれ量算出し(S1826)、その結果を用いたLERやLWRを算出する(S1827)ことにより,ノイズが少なくS/Nの良いエッジ部波形をテンプレートに用いることができるので,安定なLERやLWRの計測が可能となる。
【0069】
また、この処理によって,パターン寸法計測や形状情報抽出に用いる信号波形は劣化することなく,平均的な位置における平均波形を算出することが可能となる。このようにして得られたノイズ成分が少ない平均波形を用いて、より精度の高いパターンの寸法計測(S1813)を行うことができる。
【0070】
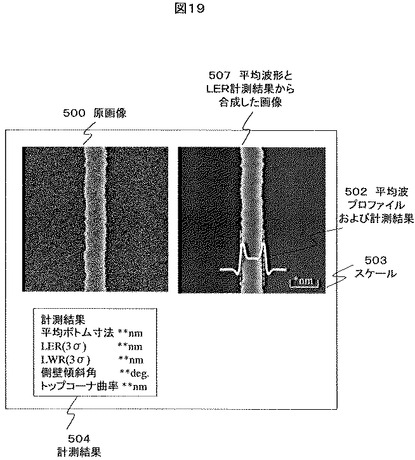
図19は結果表示の一例であり,原画像と比較して平均波形と平均波形をテンプレートとして算出したエッジ位置変動座標の結果から合成した画像を表示する。合成された画像は原画像に比べ,ノイズの少ない画像であるため,パターン形状の変化の様子などを明瞭に表示することが可能となり,パターン形状の状態の確認が容易にできる。図19には表示していないが,計測された各y座標におけるエッジ位置を画像の上に重ねて表示してももちろんよい。
これら第1の実施例は,後述する第2,第3の実施例と併用してももちろんよい。
【実施例2】
【0071】
次に,図7を用いて,本発明によるパターンの立体形状を考慮した高精度計測手法と,立体形状の推定手法について説明する。
【0072】
図5および図6に示したようなノイズ除去処理を行なうことにより信号波形のを変形させることは,エッジ位置検出結果のみならず,これらの信号波形がもつパターンの立体形状情報を得ることも難しくしてしまう。
【0073】
例えば,非特許文献3においてはパターン形状と波形の関係に着目して,パターンの断面形状を考慮した寸法計測方法が開示されているが,非特許文献4に示されている通り,計測対象画像のS/Nが悪い場合には十分な性能が得られないケースがある。このようなSEM画像に対して,図5あるいは図6に示したようなノイズ除去処理を行うと,計測に用いられるSEM信号波形が変化してしまうため,その形状から対象パターンの立体形状情報を得ることは難しくなる。
【0074】
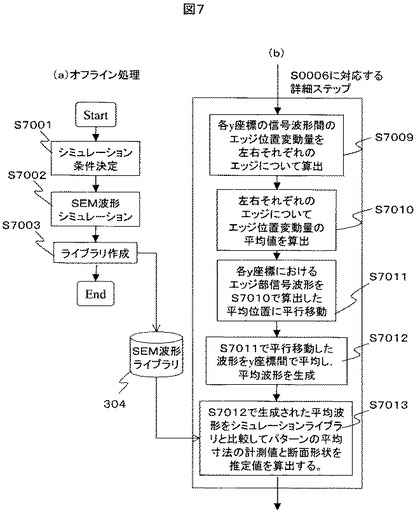
これに対して本発明では,図7に示すように,ラフネスを考慮したノイズ除去処理により生成される平均波形とSEMシミュレーションを用いて高精度な計測を実現する。まず,図7(a)に示すように,予めオフラインでシミュレーションによりSEM波形のライブラリを構築する。はじめに,想定されるターゲット形状の変動範囲と測長SEMでの画像取得条件(電子線照射の加速電圧など)からシミュレーション条件を設定し(S7001),設定した条件で様々なパターン形状および寸法のSEMシミュレーションを実施する(S7002)。
【0075】
様々なパターン形状とは,対象パターンで計測したい形状特徴量,例えば側壁傾斜角やトップや裾の丸まりなどである。計測対象のプロセスにおいて変動しやすい形状がわかっている場合(例えばトップコーナが丸まりやすい等)には,その形状変化を考慮することが重要である。これらの形状パラメタについて,実際のプロセスで生じうる範囲を想定して,それをカバーする範囲でシミュレーションを実施する。次に,これらのシミュレーション結果を用いてSEM信号波形のライブラリ304を構築する(S7003)。
【0076】
計測時には,図1(a)に示したS0001からS0007と同様の手順で、SEM波形ライブラリ構築時と同様の条件でSEM画像を取得する。このとき、図1(b)に示した計測(S0006)に対応する詳細なステップは、第1の実施例におけるステップS0009からS0012と同様に、エッジ位置変動量を算出し(S7009)、算出した結果からエッジ位置変動の平均値を算出し(S7010),エッジ部信号波形を算出した平均位置に平行移動させ(S7011),平均波形を生成する(S7012)ことにより,パターンエッジ位置の変動を考慮してノイズを低減した平均波形を生成する。生成された平均波形とシミュレーションにより構築したSEM波形ライブラリ304のデータを比較し,最も波形が一致する波形生成に用いられたシミュレーション条件の入力形状データから,計測対象パターンの寸法と断面形状推定結果を得る(S7013)。
【0077】
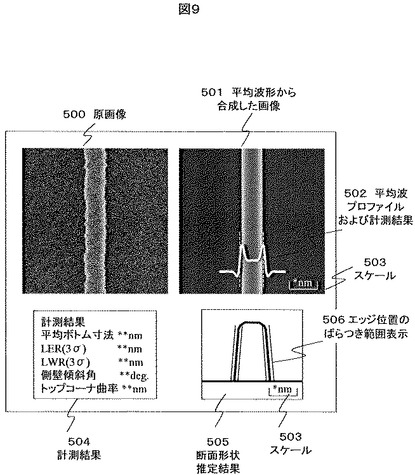
図9は第2の実施例による計測結果の表示画面の一例である。図9の例では,評価に用いられた原画像500に加え,平均波形から合成した画像501をあわせて表示している。平均波形から合成した画像は,原画像に比べノイズが少なく,平均寸法でLER/LWRのない画像となり,原画像に比べ明瞭な画像で対象パターンの状態を確認するのに役立つ。また,平均波形の合成画像には,平均波形プロファイルそのものおよび寸法計測結果(例えばボトム寸法)502や倍率を示すスケール503も合わせて表示するとさらに結果がわかりやすく便利である。画面左下に表示しているのは,計測結果の数値504であり,その右に表示してあるのは第2の実施例で推定された断面形状505である。この断面形状推定結果にも画像と同様スケール503を表示すると便利である。また,原画像から推定されたLERによるエッジ位置のばらつき範囲506を合わせて表示してもよい。このLERの高精度な計測方法については第1の実施例の第4の変形例に示した。
【0078】
第2の実施例においても,第1の実施例と同様に,従来の平滑化処理により生じていた問題を解決することが可能となる。すなわち、本発明によるサンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行うことにより生じてしまう本来のパターンに由来するものではない寸法変動成分を低減し,高精度で高感度な計測を安定に行うことが可能となる。特に,第2の実施例のように波形形状から対象パターンの立体形状を推定する場合には,平滑化による波形の変化を防ぐことは非常に重要であることは言うまでもない。
【0079】
本発明を用いれば,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定かつ高精度な寸法計測および立体形状の推定を実現することが可能となる。その結果半導体プロセスの変動を高感度に検知することが可能となる。
【0080】
また,図7に示した第2の実施例では,本発明の処理により得られる1本の平均波形についてシミュレーションライブラリとの比較処理(S7013)を行う。この,シミュレーションライブラリとの比較処理(S7013)においては,波形とシミュレーションの比較によりシミュレーションに用いられた多くのパラメタを推定する必要があるため,比較的多くの処理時間を必要とする。
【0081】
従来の技術ではラフネスのあるパターンの平均的な寸法を算出するためには,画像内複数の波形について同処理を実施する必要があったが,本発明を用いれば,既に画像内全体の平均形状および寸法を反映している波形1本のみについてS7013の処理を実施すればよいため,計算時間を大幅に削減することが可能となる。
【0082】
なお,第1の実施例と同様に,処理に用いる画像は1枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
本実施例ではSEMの2次電子画像を用いて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【0083】
[第2の実施例の変形例1]
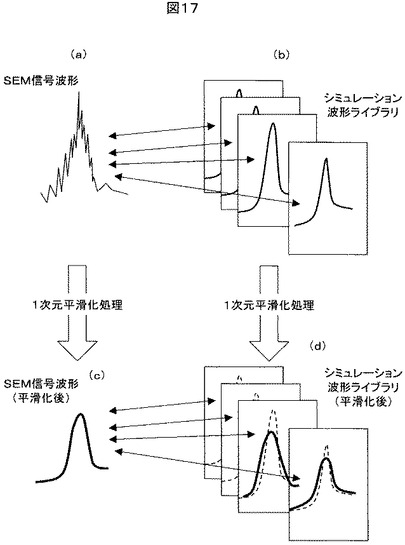
第2の実施例の変形例1では,第2の実施例の立体形状推定方法をより高精度化する方法について図17を用いて説明する。第1の実施例の変形例3の実施例で示したように,各y座標の信号波形毎に1次元のフィルタをかける場合には,周囲のエッジ位置変動の影響を受けずにノイズ除去が可能である。第2の実施例の変形例1では,この1次元のフィルタによる平滑化処理を加えることで,第2の実施例で示した立体形状推定手法の安定性および精度を向上する方法を開示する。
【0084】
図17上側は第2の実施例を示しており,SEM信号波形とSEM波形シミュレーションライブラリの波形を比較して一致するものを決定する。これに対し,第2の実施例の変形例1では図17下側に示すように,SEM信号波形およびシミュレーションライブラリの両方に同じ1次元の平滑化フィルタを適用し,ノイズ除去された波形同士を比較する。これまで説明してきたように,平滑化処理はエッジ部の波形形状を変化させてしまうが,第2の実施例の変形例1ではシミュレーションライブラリにも同じ平滑化処理が施されており,シミュレーションライブラリも同じように変形するため,ノイズ除去後による波形形状変化があっても立体形状推定には問題がない。このように,信号波形およびシミュレーション波形両方に同じ1次元平滑化処理を施すことにより,第2の実施例によるパターン寸法計測および立体形状推定をさらに高精度化することが可能となる。
【実施例3】
【0085】
次に,図10および図11を用いて,本発明によるパターンの形状情報を利用した半導体製造プロセスの評価方法について説明する。
【0086】
前記のように,図5および図6に示したようなノイズ除去処理による信号波形の変形は,エッジ位置検出結果のみならず,これらの信号波形がもつパターンの立体形状情報を得ることも難しくなる。
【0087】
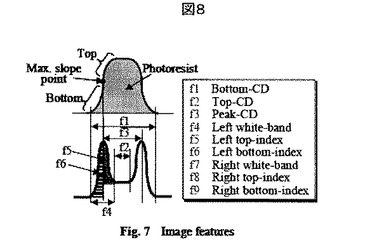
非特許文献5には,図8に示したようにSEM信号波形を複数の領域に分けてパターン形状情報を抽出することが記載されている。このような場合にも,安定な結果を得るためにはノイズ除去が重要だが,図5あるいは図6に示したような処理を行ってしまうと,パターンのラフネスの影響により波形が不安定に変化してしまうため,パターンの立体形状変化に対して良好な感度を得ることが困難になる。
【0088】
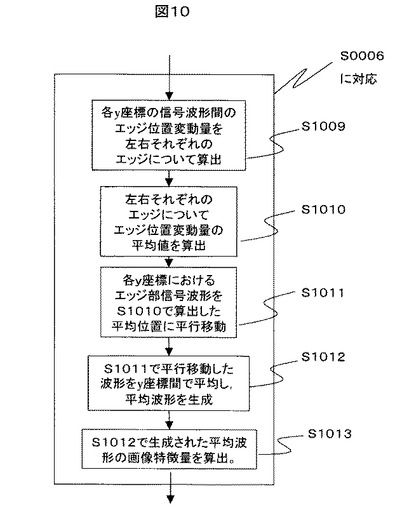
そこで,本発明では,図10に示すように,ラフネスを考慮したノイズ除去処理により生成される平均波形とSEMシミュレーションを用いて高精度な画像特徴量算出を実現し,得られた高精度な画像特徴量を用いた露光装置のモニタを実現する。SEM画像取得の手順は図1(a)を用いて説明した手順と同様である。得られたSEM画像を用いて,図10に示すような処理手順、すなわち第1の実施例の図1(b)を用いて説明した計測のステップS0009からS0012までと同様にS1009からS1012までの手順で,エッジ位置変動量を算出し(S1009),それに基づいてエッジ位置変動量の平均値を算出し(S1010),エッジ部信号波形を算出した平均位置に平行移動し(S1011),平行移動した波形から平均波形を生成する(S1012)。これにより、波形の形状を保ったままノイズを除去した平均波形を生成することができる。
次にS1013において、得られた平均波形からパターン形状に依存して変化する画像特徴量を算出する。画像特徴量としては,例えば本発明者らが執筆した非特許文献5および特許文献1に開示されている、図8に示すようなSEM信号波形を複数の領域に分けて夫々の領域からパターン形状情報を抽出する方法を用いればよい。
【0089】
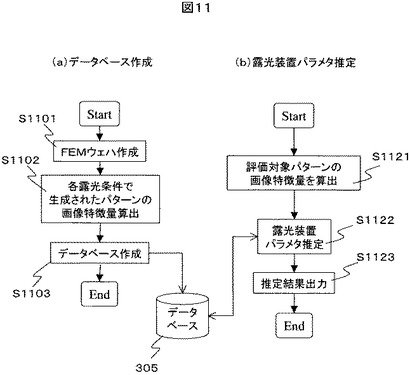
図10に示したように,信号波形の形状を保ったままノイズを低減した平均波形を用いることにより,従来に比べ,より高感度で安定な画像特徴量の算出が可能となる。この安定で高感度な画像特徴量を用いた露光装置のモニタ方法を図11を用いて説明する。本手法は,プロセス条件と当該プロセス条件により生成されたパターンの立体形状を表す画像特徴量の関係をあらかじめデータベースに記録するデータベース作成手順(図11(a))とそのデータベースを用いてプロセス条件の変動を推定する露光装置パラメタ推定手順(図11(b))からなる。
【0090】
データベース作成手順においては、図11(a)に示すように,はじめに主要な露光条件であるフォーカスおよび露光量をチップごとに変更して露光したFEM(Focus Exposure Matric)ウェハを生成する(S1101)。次にS1102において、各条件で生成されたパターンのSEM画像取得と画像特徴量算出を図10に示した手順S1009からS1013により行う。最後に本発明の方法により算出された画像特徴量と露光装置の条件(フォーカスおよび露光量)の関係を用いてデータベースを作成し(S1103)、データベース305に記録する。実際にプロセスを管理するときには,図11(b)に示した手順に基づいて、S1121で評価対象パターンの画像特徴量を図10に示した手順により算出し,得られた画像特徴量をデータベース305に記録されている画像特徴量と比較して露光装置の条件変動を推定し(S1122),推定結果を出力する(S1123)。
【0091】
第3の実施例においても,第1および第2の実施例と同様に,従来の平滑化処理により生じていた問題を解決することが可能となる。サンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行うことにより生じてしまう本来のパターンに由来するものではない信号波形の変動成分を低減し,高精度で高感度に対象パターン形状に依存した画像特徴量を算出することが可能となる。
【0092】
第3の実施例のように波形形状から対象パターンの立体に関連した情報を抽出する場合には,平滑化による波形の変化を防ぐことは非常に重要であることは言うまでもない。
【0093】
本発明を用いれば,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定かつ高精度にパターンの立体形状情報を抽出することができ,その結果半導体プロセスの変動を高感度に検知することが可能となる。
【0094】
なお,第1の実施例と同様に,処理に用いる画像は1枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
【0095】
本実施例ではSEMの2次電子画像を用いて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【実施例4】
【0096】
次に,第1の実施例とは異なる方法で平均波形を生成するパターン計測方法について図20から図24を使用して説明する。
【0097】
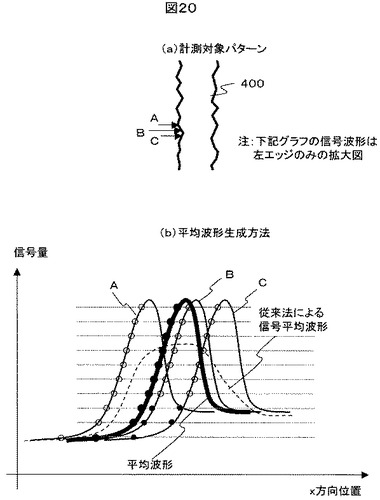
図20は第4の実施例の概念を説明する図である、この図20では効果が明確になるようにノイズのない波形で説明しているが,実際はノイズのある波形である。図20(a)および図20(b)に破線で示した従来法による信号平均波形は図2に示したものと同じである。これに対して本発明では同じ信号量の信号波形の平均位置を算出することで平均波形を生成する。図20(b)において,細線で示したそれぞれの信号波形が同じ信号量を持つ点(同じ横線の上に示されている白抜きの点)を算出し,その平均座標(黒点)をつなげば,元の信号波形形状を維持したまま,元の波形の平均位置に移動した平均波形(太線)を得ることができる。
【0098】
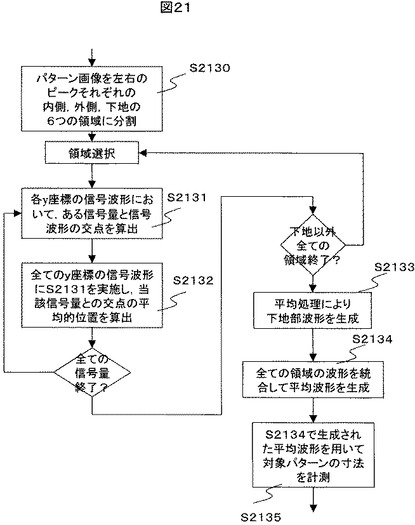
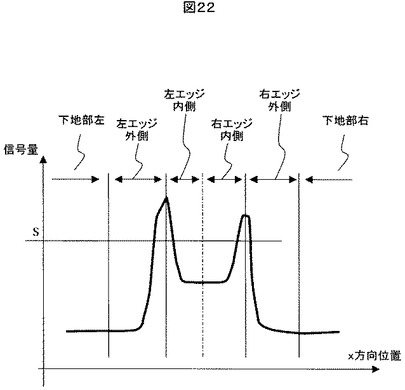
図21に実際の手順を示す。一般にラインパターン計測に用いるSEM信号波形は一つの信号波形に対応する座標が2つ以上存在する。図20では簡単のため,エッジ部波形ピークの左側だけを用いて説明しているが,右側やもう一方のエッジ部ピークの両側にも同一信号量を持つ点がある。そこで,はじめに図22に示すように信号波形を左右エッジのピーク内側,外側,下地部分の6つの領域に分けておく(S0030)。次に,下地以外のそれぞれの領域について,各y座標の信号波形においてある信号量を持つ位置を算出する(S0031)。
【0099】
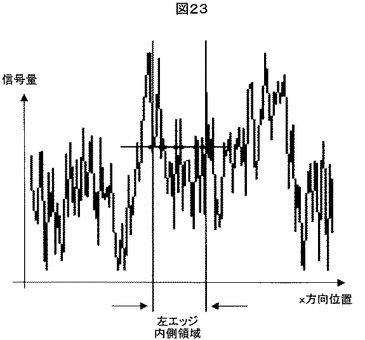
図20ではノイズのない図で説明したが,実際の波形は図23に示すようにノイズがあるために,ある信号量との交点は一般に複数になるが,ランダムなノイズであれば,これらの平均は実際にその信号量を持つ座標に近いと考えられる。そこで,このS0031の処理では,算出される複数の交点すべてを求める。次に,この処理を全ての信号波形について実施して平均的な位置を算出する(S0032)。
【0100】
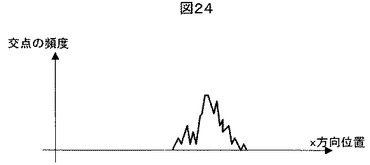
1つの信号量について得られた全ての交点の座標についてヒストグラムみると,例えば図24に示すように,あるばらつきを持つ分布となる。このばらつきには,計測対象のエッジ位置のばらつきとノイズによりばらつきの両方が含まれている。十分に多いデータが得られていれば,これらの平均的な位置を推定することで,エッジ位置およびノイズ両方のばらつきを除去した元々の信号波形を復元することが可能となる。単純な平均値の代わりに座標の中央値やヒストグラム(平滑化などを行ってもよい)の最頻値などを用いてもよく,得られたデータの数によって適切な方法を選択すればよい。このS0031,S0032を全ての信号量およびエッジピークの4つの領域について行う。また,下地部分についてはパターンがないため,単純に従来法と同様の信号平均処理により波形を推定する(S0033)。
【0101】
得られた各領域の信号波形を統合して,平均波形を生成(S0034)し,この平均波形を用いて第1の実施例同様に対象パターンの平均寸法を計測することができる(S0035)。第4の実施例を用いることで,第1の実施例と同様に安定で高精度な計測を実現することができる。
【0102】
第2および第3の実施例についても,エッジ位置変動を合わせて生成した平均波形のかわりに,第4の実施例で開示した方法により生成された平均波形を用いてパターンの寸法計測や立体形状推定,またはパターン形状に関連した画像特徴量の算出を行えば,第1,第2および第3の実施例と同様の効果を得ることが可能となる。
【実施例5】
【0103】
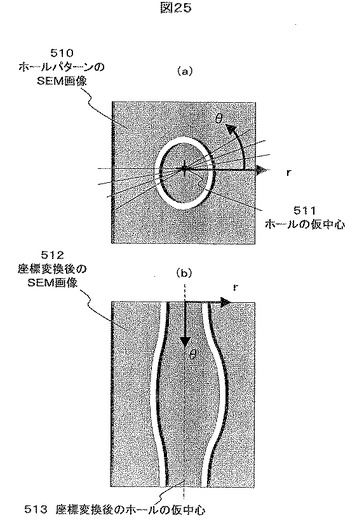
次に,これまでの実施例をホールパターンに適用する方法について説明する。計測対象がホールパターンである場合には,ホールのエッジ部分がラインのエッジ同様に明るく光るため,ホールパターンのSEM画像510は図25(a)に示すようなものとなる。
【0104】
以下に,このような画像に本発明を適用する手順を示す。はじめに,従来法でホールの仮中心511を算出する。ここでは多少検出精度が低くとも問題はない。次に,算出されたホールの仮中心511を基準として,図25(a)に示すように半径方向rとそれに直交する角度方向θの軸を決定し,得られたホールパターンのSEM画像510を極座標変換して,図25(b)に示すような変換後のSEM画像512を生成する。このとき,変換後のホールの仮中心513は図25(b)に破線で示すように,直線となる。
【0105】
図25(b)に示すように,極座標変換後の画像は、図4(c)等に示したラインパターンと同様の画像となる。このように,座標変換によりホールパターンの画像をラインパターンと同様な形状に変換することができれば,この画像に,これまでに説明した全ての実施例を同様に適用することが可能となる。上記の実施例を適用した後に,より高い精度でホールのエッジ位置を確定することができれば,その後で再度ホールの中心位置やホール径を算出すれば,従来法に比べより精度の高いホール計測を実現することが可能となる。
【0106】
第5の実施例を用いることで,第1の実施例と同様に安定で高精度な計測を実現することができる。第2および第3の実施例についても,エッジ位置変動を合わせて生成した平均波形のかわりに,第5の実施例で開示した方法により生成された平均波形を用いてパターンの寸法計測や立体形状推定,またはパターン形状に関連した画像特徴量の算出を行えば,第1,第2,第3および第4の実施例で説明した場合と同様の効果を得ることが可能となる。
【図面の簡単な説明】
【0107】
【図1】本発明のパターン計測方法の第1の実施例の手順を説明するフロー図である。
【図2】(a)は計測対象のラインパターンの平面図、(b)は従来のライン加算信号波形を示すグラフ、(c)は本発明のパターン計測方法の第1の実施例におけるライン加算信号波形を示すグラフである。
【図3】本発明のパターン計測方法を実施する測長SEMのシステム構成を示すブロック図である。
【図4】(a)は測長SEMの理想画像とその信号は径を示す図、(b)は測長SEM画像とその信号波形図である。
【図5】エッジラフネスを考慮しない場合の平滑化処理前後のSEM信号波形を示す信号波形図。
【図6】エッジラフネスを考慮した場合の平滑化処理前後のSEM信号波形を示す信号波形図。
【図7】本発明によるパターン計測方法の第2の実施例の手順を説明するフロー図である。
【図8】SEM信号波形における各種の画像特徴量を説明する公知の図である。
【図9】本発明のパターン計測方法の第2の実施例における結果を表示する画面の正面図である。
【図10】本発明のパターン計測方法の第3の実施例の画像特徴量算出手順を説明するフロー図である。
【図11】本発明のパターン計測方法の第3の実施例における露光装置パラメタを推定する手順を示すフロー図である。
【図12】(a)はラインパターンを模式的に示す平面図、(b)は本発明の第1の実施例の第1の変形例を説明する多数回スキャンして加算してS/Nの良いテンプレートとして作成したSEM信号波形を示す信号波形図、(c)は通常のSEM画像とSEM信号波形を示す図である。
【図13】非特許文献6に開示されている半導体パターンの線幅ラフネスの一般的な特性を説明する図である。
【図14】本発明のパターン計測方法の第1の実施例の第2の変形例におけるラインスキャンピッチを示す模式的なラインパターンの平面図である。
【図15】本発明のパターン計測方法の第1の実施例の第3の変形例における1次元平滑化処理を説明する図であり、パターンエッジ部分におけるエッジ位置を画像の画素との関係が判るように模式的に示したパターンのエッジ部分を含む画像である。
【図16】本発明のパターン計測方法の第1の実施例の第3の変形例を説明する処理手順を示すフロー図である。
【図17】本発明のパターン計測方法の第2の実施例の変形例を説明する図であり、(a)はSEM信号波形を示す波形図、(b)はSEM信号波形に対応するシミュレーション波形ライブラリに記憶されている波形図、(c)は1次元平滑化処理を施したSEM信号波形を示す信号波形図、(d)は1次元平滑化処理を施したシミュレーション波形ライブラリに記憶されている信号波形図である。
【図18】本発明のパターン計測方法の第1の実施例の第4の変形例の処理フローを示すフロー図である。
【図19】本発明のパターン計測方法の第1の実施例の第4の変形例における結果を表示する画面の正面図である。
【図20】(a)は計測対象パターンを模式的に示したパターンの平面図、(b)は本発明のパターン計測方法の第4の実施例における平均波形生成方法を示す信号波形図である。
【図21】本発明のパターン計測方法の第4の実施例の処理手順を示すフロー図である。
【図22】本発明のパターン計測方法の第4の実施例における領域分割を説明する信号波形図である。
【図23】本発明のパターン計測方法の第4の実施例における処理における左エッジ内領域を示す信号波形図である。
【図24】本発明のパターン計測方法の第4の実施例における処理を説明する図で、図23に示した信号波形図における1つの信号量について得られた全ての交点の座標に関する頻度を示すヒストグラムである。
【図25】(a)はホールパターンのSEM画像、(b)はホールパターンのSEM画像を極座標変換して得た画像である。
【符号の説明】
【0108】
100・・・測長SEM画像(理想画像) 101・・・測長SEM信号波形(理想画像) 102・・・測長SEM画像 103・・・y座標Aにおける測長SEM信号波形 104・・・y座標Bにおける測長SEM信号波形 105・・・平滑化前の信号波形 106・・・平滑化後の信号波形 200・・・電子光学系 201・・・電子銃 202・・・コンデンサレンズ 203・・・対物レンズ 204・・・偏向器 205・・・ExB偏向器 206・・・二次電子検出器 207・・・A/D変換器 208・・・アライメントコイル 209・・・非点補正コイル 210・・・対物レンズ絞り 300・・・画像処理部 301・・・記憶媒体 302・・・表示装置 303・・・一次電子ビーム 400・・・ラインパターン部 401・・・下地部 500・・・原画像 501・・・平均波形から合成した画像 507・・・平均波形とLER計測結果から合成した画像 510・・・ホールパターンのSEM画像 512・・・座標変換後のSEM画像
【技術分野】
【0001】
本発明は半導体デバイスの製造工程においてウェハ上に形成された回路パターンの加工形状の寸法を,回路パターンの電子顕微鏡画像を用いて計測する方法及びそのシステムに関する。
【背景技術】
【0002】
半導体デバイスの製造工程において,基板であるウェハ上に多層に形成されるパターンの寸法および形状は,その半導体デバイスの性能を決める重要な要因のひとつである。中でもトランジスタゲート配線をはじめとする配線パターンは,その配線幅および形状とデバイス動作特性に強い関連があり,所望の配線形状を実現する製造プロセスを構築することが非常に重要である。
【0003】
一般な半導体デバイスのパターンは露光技術を用いて生成される。対象となる材料の上に感光性有機材料(フォトレジストと呼ばれる)などの膜を生成し,所望のパターンを露光・現像し,生成されたフォトレジストパターンをマスクとしてターゲット材料のエッチングを行うことで微細なパターンを形成する。
【0004】
半導体デバイスの製造ラインにおいては,この露光・現像後のフォトレジストパターンあるいはエッチング後のパターンの寸法を測長SEMなどを用いて計測,管理することが一般的に行われている。数十ナノメートルオーダの微細配線の線幅を測定する測長ツールとしては,それらの配線を10万倍を超える拡大倍率で撮像可能な線幅測定用の走査型電子顕微鏡(測長SEM(Scanning Electron Microscope)またはCD(Critical dimension)SEM)が従来から用いられている。非特許文献1に示されているように,測長SEMによる計測に対しては高い再現性と計測の確からしさが要求されている。電子顕微鏡画像(以下、SEM画像と記す)を用いて精度のよい計測を行うためには,コントラストが高くノイズの少ない,質のよい画像を用いることが効果的である。
【0005】
一方,非特許文献2に示されるように,ArFレジストやLow-k材のように,近年の半導体製造プロセスで一般的に用いられている材料の中には電子線照射に対して耐性の低いものも多い。このような材料からなるパターンを計測する場合には,計測対象パターンへのダメージを低減するために電子線の照射量はできるだけ少なくおさえることが望ましい。このような材料の計測においては,S/Nのよい良質な画像を用いることは一般に難しい。このため,このようなサンプルに対しては,画像の平滑化などの処理を行うことで,ノイズの影響を低減し,計測の再現性向上をはかっている。
【0006】
また、非特許文献3には、パターン形状と波形の関係に着目して,パターンの断面形状を考慮した寸法計測方法が開示されている。すなわち,パターン断面形状とSEM信号波形の関係を予めモンテカルロシミュレーションにより計算し,ライブラリとして保存しておき,計測時には実際のSEM画像と最も一致する波形データをライブラリ中から選択することにより,パターンの断面形状とそれを考慮した高精度な寸法計測を実現ことが開示されている。
【0007】
更に、非特許文献5には、得られた波形からパターン形状に依存して変化する画像特徴量を算出する場合に画像特徴量として選択する箇所の例として、SEM画像信号のボトム、トップ、信号ピーク間隔などのCD値を求める例が示されている。
【0008】
【非特許文献1】International Technology Roadmap for Semiconductors 2005 Edition, Metrology (http://www.itrs.net/)
【非特許文献2】A. Habermas, D. Hong, M. Ross, W. Livesay, “193nm CD Shrinkage under SEM: Modeling the Mechanism” Proc. SPIE 4689, pp. 92-101 (2002).
【非特許文献3】J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Scanning electron microscope analog of scatterometry,”Proc. SPIE 4689, pp. 304-312 (2002)
【非特許文献4】J. S. Villarrubia, A. E. Vladar, M. T. Postek, “A simulation study of repeatability and bias in the CD-SEM,” Proc. SPIE 5038, pp. 138-149, 2003.
【非特許文献5】Chie Shishido, Ryo Nakagaki , Maki Tanaka, Yuji Takagi, Hidetoshi Morokuma, Osamu Komuro, and Hiroyoshi Mori, “Dose and focus estimation using top-down SEM images,” Proc. SPIE 5038, pp. 1071-1079 (2003)
【非特許文献6】Atsuko Yamaguchi, Hiroshi Fukuda, Hiroki Kawada, and Takashi Iizumi, ”Impact of Long-Period Line-Edge Roughness (LER) on Accuracy in CD Measurement,” Proc. SPIE 5752, pp. 1362-1370 (2005)
【特許文献1】特開2003−173948号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
背景技術に示されているように,電子顕微鏡画像を用いた計測では,パターンへのダメージ低減のために電子の照射量を低減し,この電子照射量低減による画像のS/N低下の影響を平滑化のような画像処理手段により低減することで,計測の再現性も確保している。しかしながら,平滑化のような画像処理手段を用いると,ノイズの影響を低減できる一方でパターンの持つ形状あるいは寸法の情報が劣化してしまう。図4および図5は平滑化処理による波形情報の劣化の例であり,元々のSEM画像の波形が平滑化処理により大きく変化していることがわかる。
【0010】
また,露光技術を用いて形成される半導体パターンは,非特許文献5に示されているように,ラインエッジラフネス(Line edge roughness, LER)や線幅ラフネス(Line width roughness, LWR)とよばれるパターンエッジ位置および寸法の変動を持つことが知られている。このため,図5に示すようなラインの長手方向の平均処理を行うと,このラフネスの影響によりSEM画像の信号波形が変形してしまうため,画像処理によるS/N低減を行うのは困難である。
【0011】
一方,非特許文献3、非特許文献4および非特許文献5に示されているように,SEM画像波形は対象パターンの形状により変化する。非特許文献3および非特許文献4ではこのような形状の違いに着目して,計測対象パターンの断面形状の情報を取得したり,これらの形状を考慮した高精度な計測を実現したりしている。しかしながら、非特許文献4においては、パターンの断面形状を考慮した寸法計測方法においても,計測対象画像のS/Nが悪い場合には再現性が低下することが記載されている。
【0012】
これに対し,平滑化は再現性向上には効果的な処理であるが,図4あるいは図5に示したような平滑化処理により生じる波形の変化は,パターン形状情報を劣化させてしまうため,このような画像を用いたのでは,パターンの断面形状を考慮した高精度な計測を実現することはできず,パターンの微細化に伴う計測高精度化への要求に見合う高精度な計測を実現することが困難となっている。
本発明が解決しようとする課題は,S/Nの悪い画像においても,元々のパターンの持つ形状および寸法の情報を劣化させることなくノイズの影響を低減し,高精度な電子顕微鏡画像(SEM画像)によるパターン寸法計測を実現することにある。S/Nの悪い画像においても,パターンのもつ形状および寸法の情報を得ることが可能になれば,パターンへのダメージを生じることなく,高精度な寸法の計測が実現可能となる。
【課題を解決するための手段】
【0013】
本発明では上記した課題を解決するために,パターンのラフネスによるエッジの位置ずれ量を算出し,各信号波形のエッジ位置ずれを補正した後に平均することで,エッジ部分の波形形状情報を維持したまま平均的な位置におけるノイズの少ない平均波形を生成する。この平均波形を用いて計測することで高精度な計測を実現するようにした。
【発明の効果】
【0014】
本発明により,パターンのダメージを防ぎ,かつ短時間に高精度な測長SEM計測の実現が可能となる。S/Nの悪い画像であっても,パターンの立体形状情報を高感度に検出することが可能となるため,本発明を用いたパターン計測結果により,パターンの形状変化などの半導体プロセスの状態の管理あるいは制御が可能となるといった効果もある。また,低S/Nの画像でも計測ができるということは,画像取得に要する時間の短縮が可能になり,パターン寸法計測のスループット向上の効果も得られる。
【発明を実施するための最良の形態】
【0015】
以下に、本発明を実施するための最良の形態を実施例を用いて説明する。
【実施例1】
【0016】
第1の実施例として,本発明のパターン計測方法の基本的な電子顕微鏡画像処理手順を図1から図3を用いて説明する。
【0017】
図1(a)は本発明のパターン計測方法における測長SEMを用いた計測の実施手順の一例を示している。図1(b)は図1(a)のステップS0006の詳細を説明したものである。
【0018】
図1(a)に示す手順により実際の計測を実施する。はじめに,通常の測長SEM計測と同様にウェハを装置にロード(S0001)し,ウェハアライメント(S0002)によりウェハ上パターンの位置を校正する。次に計測対象パターンの近くにステージを移動し,予め設定しておいた近傍のパターンを用いて正確な位置決め(S0003)およびフォーカス・非点合わせ(S0004)による像質の調整を行う。その後,計測対象パターンの画像を取得(S0005)し,計測を実行する(S0006)。
【0019】
図1(a)は画像取得直後に計測を実施する例であるが,画像だけを取得しておいて計測は別途行ってもよい。その場合には,図1(a)の計測ステップS0006の代わりに画像記録(図示せず)あるいは画像転送(図示せず)を行い,画像データを記録媒体に記録しておいて,別途計測処理を実施すればよい。同一ウェハ上で複数のパターンを計測する場合は,図1(a)に示すように,ステップS0003からステップS0006を繰り返して,全てのパターンに対して計測あるいは画像取得を実行する。画像取得が終了したらウェハをアンロード(S0007)する。
【0020】
図1(b)は本発明における画像処理手順の実施形態の一例であり,図1(a)のステップS0006の詳細を説明したものである。計測対象パターンの画像を取得した後,計測対象のSEM画像内において,各Y座標間のエッジ位置の相対的な変動量を左右それぞれのエッジごとに算出する(S0009)。次に,S0009で算出したエッジ位置の変動量の平均値を左右それぞれのエッジについて算出する(S0010)。次に,各Y座標におけるSEM画像信号を,S0010で算出した平均エッジ位置からのずれ量分だけ平行移動させて,S0010で算出した平均エッジ位置に移動させた波形を生成する(S0011)。次に,生成された平均エッジ位置に平行移動された波形をY方向の波形間で平均し,平均波形(詳細は後述)を生成する(S0012)。
【0021】
次に,このようにして得られた平均波形に対してエッジ位置検出処理を行い,取得SEM画像内における平均波形のパターン左右のエッジ位置を算出し,これらの差分から計測対象パターンの平均寸法を算出する(S0013)。
【0022】
非特許文献5に示されているように,パターンのエッジ位置は比較的狭い範囲においても数ナノメートル変化する恐れがある。これに対し,発明者らの検討によると,一般的な半導体製造プロセスでは,同じパターンの同じエッジ内におけるパターン側壁の形状変化はエッジ位置の変動に比べると小さいことがわかっている。このように,側壁の形状変動が小さい場合には,図1(b)に示す手順によりあらかじめエッジ位置の変動を考慮しておけば,平均処理によりノイズ低減の効果は得られるが,波形の形状変化は十分小さく,SEM波形に影響を与えることなく安定な計測が可能となる。
【0023】
図2に図1で示した手順の概念図を示す。図2(a)は計測対象であるラインパターン400を平面的に見たときの模式図であり,測長SEMでは通常図2と同じ方向から撮像された2次元の画像を用いて計測を行う。図2に示すように,ラインパターン寸法はばらつきを持っており,y座標によってそのエッジの位置(ラインエッジラフネス:LER)および寸法(線幅ラフネス:LWR)が変化する。このため,図2に示すように,異なるy座標(A,B,C)においてエッジ部分の波形はエッジ位置変動に応じてx方向にシフトしたような波形となる(実際には対象形状の微妙な違いやノイズにより波形形状も変化する)。図2(b)の従来技術では,このラフネスを考慮することなく,同じx座標の波形どうしの信号量を平均することによりノイズ低減をはかっている。
【0024】
図2(b)に従来技術を示す。図2(b)に示すように,座標A,B,Cにおいてはエッジの位置が異なるため,信号波形のピークの位置も変化する。例えばy座標Aにおける信号波形103とy座標Bにおける信号波形104は同様の形状を持つが,そのx方向の位置は異なっている。このような信号波形に対し,従来技術では,例えばy座標A,B,Cの同じx座標の信号量Sa, Sb, Scを平均してSavgを算出,同様に全てのx座標について平均値をとることにより,平均の効果によりノイズを低減する(以降,本処理をライン加算と呼ぶ)。これに対し図1(b)で説明した本発明による計測方法では,図2(c)に示すように,予め各y座標の画像間のx方向位置ずれ量を算出し,そのずれを修正して位置を合せた後に平均(ライン加算)処理を行う。
【0025】
図2(c)に示す112は,元の信号波形(103,104など)を位置ずれ量の算出結果に基づき,x方向に移動させた位置合わせ後の信号波形である(実際にはノイズや微妙なパターンの断面形状の違いにより103,104の波形は異なるため,座標A,B,Cの波形は位置合わせを行っても完全に同じものにはならない)。本発明の位置合わせ処理を行うことによって,元々の波形が持っていた対象パターン形状の情報の劣化を抑えることができる。図2(c)の位置合わせ後のライン加算信号は,位置ずれ量の平均値に合せて加算処理を行うため,それぞれのエッジについて,平均的な形状の波形が平均的な位置に配置されたものが生成されることになる。本明細書ではこれを平均波形(S0012参照)と呼ぶ。
【0026】
x方向の位置ずれ量の算出は一般的な位置ずれ量算出手法を用いればよい。例えば,基準となる波形を選択し,基準波形をテンプレートとして,対象のy座標の波形との相関をx方向の位置をずらして計算し,最も相関の高い場所を選べばよい。画像のS/Nが非常に悪い場合には,この位置ずれ量の算出においても信頼できる結果を得ることは難しくなる。そこで,図1(b)に示した処理フローにおいてS0012が終わったあと,S0012で算出した平均波形をテンプレートとして,もう一度エッジ位置変動量を算出してS0009からS0012までをもう一度繰り返すと(図示せず),位置ずれ量検出の精度が向上し,さらに安定な計測が可能となる。S/Nが非常に悪い画像に対して信頼性の高い位置合わせを実現する他の方法については第1から第4の変形例で説明する。
【0027】
図3に画像を取得するのに用いる一般的な測長SEMの構成を示す。電子光学系200において,電子銃201から放出された一次電子ビーム303はアライメントコイル208,コンデンサレンズ202,非点補正コイル209,対物レンズ203および対物レンズ絞り210によって集束され,微小スポットとして試料100上に照射される。電子ビームが照射されると,照射された部分から試料100の材質や形状に応じた二次電子や反射電子が発生する。偏光器204,205を用いて1次電子ビーム303を二次元走査し,発生する二次電子を二次電子検出器206で検出し電気信号に変換し,さらにA/D変換器207でデジタル信号に変換することによって,二次元のデジタル画像としての二次電子線像が得られる。なお,半導体プロセスにおける寸法計測には,(反射電子線像ではなく)2次電子線像が用いられるのが一般的である。以下,単に電子線像あるいはSEM画像と表現した場合には2次電子線像を指すものとする。
【0028】
得られた画像は記憶媒体301に記憶され,画像処理部300で処理される。あるいは外部インターフェース020を通じて,一旦外部に設けた画像データベース(図示せず)に保存された後,あるいは直接外部に設けた画像処理ユニット(図示せず)に送られて処理を行っても良い。装置の操作や結果表示は表示装置302を通じて行われる。(図3の中で、200,208,209,210の記載なし←上のパラグラフに追加しました。)
次に図4(a)乃至(d)を用いて,本発明が解決する課題と本発明における画像処理内容の詳細を説明する。図4(a)乃至(d)に示す画像および波形はシミュレーションにより生成したものであり,画像の上下方向(y方向)に長い配線パターンのSEM画像を表わしている。図4(a)(c)では,平らな下地部分401の上にある高さを持ったラインパターン400がある場合のSEM画像の例を示している。
【0029】
図4(a),(c)に示すように,配線パターンにおいては,ラインパターン部400のエッジ部分が他の平らな部分(下地部401およびパターンの上部,つまり信号波形の二つのピークの間の部分)に比べ明るく光るため,この信号量の変化を利用して画像処理によりパターンエッジの位置を検出する。図4(a)はノイズもラフネスも無い理想的な場合の測長SEM画像100である。一方,図4(c)は実際の測長SEMを用いた計測対象画像を模擬したものであり,パターンにはラフネス(LERおよびLWR)がある場合の測長SEM画像102を示している。また,図4(c)の画像に対応する図4(d)の信号波形(103および104,103)は図4(a)の画像に対応する図4(b)の信号波形101と同じであるが,画像信号はノイズにより劣化しており,波形が大きく変化していることがわかる。
【0030】
SEM画像のノイズを低減するためには、SEM画像を取得する時に試料に照射して走査する1次電子ビームのビーム電流量を大きくすること、1次電子ビームを走査する速度を遅くして試料上の単位面積あたりの照射時間を増やすこと、または加算フレーム数(ある領域に集束させた電子ビームを照射して走査することにより1フレーム分の画像を得ることを複数回繰返し、得られた複数のフレーム分の画像信号を積算する処理)の増加が効果的である。しかし、電子線照射に対する耐性の低い材料のSEM画像を取得する場合に上記したような方法を適用するのは難しく、ノイズの多い画像での処理が必要となる。
【0031】
図4(c)に示したノイズは,電子線照射がパターンに与えるダメージを低減するために電子線照射量を少なくしているために生じているものであり,実際の測長SEMにおいて起こりうるものに近い条件のものである。なお,図4(d)において,測長SEM信号波形103と104は,ラフネスによりピークの位置が変化したことに加え,画像が取得される際のノイズがランダムに変化しているため,元々のピーク部分の形状は全く同じものであるにも関わらず,全く異なる波形となっている。
【0032】
従来のパターン寸法計測手法では,例えば図4(b)の信号波形に図示しているように,パターンエッジに対応する波形ピークの信号量と下地部分の信号量を基準として,これらの差の一定の割合(図4(b)の場合は50%)となる点をエッジ位置として,左右のエッジ位置を算出し,それらの差分によりパターン寸法を計測している(以下,しきい値法と呼ぶ)。
しかしながら,図4(d)に示すように,ダメージを受けやすい材料のパターンにおいては,電子線の照射量を少なくするために信号波形がノイズにより劣化してしまい,その結果しきい値法などでは安定な計測を行うことが困難になってしまう。これに対し,従来の計測手法では画像処理によるノイズ除去処理を行って安定な計測を実現している。
【0033】
図5および図6は従来の測長SEM計測におけるノイズ除去処理の例と計測における課題を示している。図5は平滑化フィルタ処理の例であり,平滑化前の信号波形105に対して,平滑化後の信号波形106は波形の形状もエッジ部ピークの信号量も変化していることから,同じ方法でエッジ位置検出処理を行ったとしても,平滑化前と平滑化後では,検出されるエッジ位置が同じになるとは限らないことがわかる。なお,波形変形の影響を明確にするためにノイズのないシミュレーション画像で説明しているが,実際には信号波形には図4(b)に示したようなノイズが含まれている。平滑化処理により高周波成分を除去することによりノイズの影響が低減され計測は安定になるが,上記の通り,計測値が平滑化前のものと同じになるとは限らない。
【0034】
図6は図2で示した従来技術のライン加算と呼ばれる処理であり,配線パターン画像がy方向と平行である事を利用して,y方向の異なる位置の画像信号を平均して,ノイズを除去する方法である。この方法は図4(a)に示した画像のように対象パターンにラフネスがなければ,ノイズ除去には有効な方法であるが,図4(b)に示したようにラフネスがある場合には正しい結果が得られない場合がある。図6はあるy座標の範囲107で図6(b)に示すような複数の信号波形109を平均化した例である。図6(a)の模式図に示した例では,波形平均範囲内におけるエッジ位置の変動範囲108が左右のエッジで異なる。右側のエッジはエッジ変動量が少ないため,波形を平均しても元の波形と形状はあまり変わらない。
【0035】
一方,左側のエッジでは,位置ずれ量の大きい波形の平均をとってしまうため,図6(b)に示すようにライン加算により得られる波形110がライン加算前の信号波形111と大きく異なってしまう。このため,図5の平滑化の例と同様に,ライン加算処理を行うと計測値がライン加算前のものと同じになるとは限らないという問題がある。なお,図5に示した平滑化の例においても,2次元のフィルタ処理を行うと,エッジ部分のラフネスによって平滑化の結果が変化してしまうため,場所によってフィルタの影響が安定しなくなってしまう。
【0036】
これに対し,本発明の平均波形生成処理は対象の側壁形状情報を維持したままノイズの低減が可能となる。例えば,y方向の画素数100画素分のSEM画像データを用いる場合はノイズは画素数の平方根の逆数,つまり約十分の一に低減することが可能となる。これは,統計的な効果によるもので,例えば正規分布に従う母集団から無作為にn個のデータを抽出した場合,n個のデータの平均値の分布は母集団の標準偏差をnの平方根で除した標準偏差を持つ正規分布となる。これと同様に,SEM画像の信号量におけるノイズはランダムなものであり,平均に用いる画素数が増えれば,それに応じたノイズ低減の効果が期待できる。
【0037】
なお,第1の実施例では1枚の画像内における異なるy座標の波形を用いて平均波形を算出する例を示したが,使用する画像は必ずしも一枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
【0038】
図5および図6に示したように,従来技術のノイズ除去処理方法は、もともとの信号波形を変化させてしまうため,計測結果は安定になるかもしれないが,パターン形状や寸法の変動に対する感度は低下する恐れがある。特に,エッジ部波形のピーク形状が横方向に広がってしまうため,実際の寸法よりも計測結果が大きくなってしまう。
【0039】
これに対し,図1に示した本発明による平均波形の生成とそれを用いたパターン寸法計測あるいはパターン立体形状情報の推定を行えば,従来の平滑化処理により生じていた問題を解決することが可能となる。すなわち、本発明によるサンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行なうことにより生じてしまう本来のパターンに由来するものではない寸法変動成分を低減し,高精度で高感度な計測を安定に行うことが可能となる。このため,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定した計測を実現することが可能となる。
【0040】
図3ではSEMの2次電子画像を用いるシステムについて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【0041】
[第1の実施例の変形例1]
第1の実施例で示したように,対象パターンのラフネスを考慮した平均波形を生成することにより高精度かつ高感度なパターン寸法計測が可能となるが,画像のS/Nが非常に悪い場合には,ラフネスによる位置ずれ計測がうまくいかない場合がある。第1の実施例の変形例1の実施例では図12を使って,この位置あわせ処理を高精度化する方法について説明する。
【0042】
変形例1では,エッジ部分の信号波形間の位置ずれを算出する場合に,S/Nのよいテンプレートを用いることで位置ずれ量検出の精度向上を実現する。図12(a)は計測対象パターンと電子ビームスキャン位置の関係の模式図である。図12(c)は通常のSEM画像取得の電子ビームスキャン位置117をスキャンして得られるSEM画像102、図12(d)はSEM画像102の波形信号115である。通常は,図12(c)に示すように,y方向に一定間隔のピッチでビームをスキャンすることにより2次元の画像信号を得ている。各y座標におけるスキャンは1回とは限らず,複数回のスキャンの結果を平均することも一般的に行われている。これまでの説明にもあったように,電子線照射に対して耐性のないサンプルでは,この照射電子量(電流量やスキャン回数,スキャン速度などで調整する)をできるだけ少なくするために,図12(d)に示すように信号波形115のS/Nが非常に悪くなる。
【0043】
そこで,本変形例1では,通常の画像内におけるエッジ位置の移動量を推定するために,計測位置とは別の場所で,通常より多めの電子を照射して,比較的S/Nのよい信号波形を取得し,これをテンプレートとして利用する。例えば,図12(b)に示すように,同じ場所で通常よりも多い回数のスキャンを行い,その平均波形を得ることができれば,この多数回スキャンして積算した信号波形114は通常スキャンの波形115に比べてS/Nがよくなる。電子の照射量が多くなるとダメージも多くなるが,非常に狭い範囲に限定すれば2次元に広い範囲で照射するのと比べて,その影響は十分小さく抑えられるので,図12に示すように,計測対象領域と同じエッジ上で,y方向の距離が離れたところで,ダメージが問題ない範囲でできるだけ多くのスキャンを行い平均信号波形を生成すればよい。
【0044】
このようにして,通常スキャンよりもS/Nの良い信号波形が一つ得られれば,この波形データから得られるエッジ部波形をテンプレートとして,x座標をずらした際の計測対象波形との相関値を用いて,計測対象画像の各y座標の左右それぞれのエッジ位置ずれ量を算出すればよい。このようにS/Nのよいテンプレートを用いれば,115のようにS/Nの悪い画像同士で行うよりもずっと安定な位置ずれ量検出が可能となる。
【0045】
なお,図12(a)では便宜的に電子ビームのスキャン方向を左から右として説明したが,特に同方向に限定するものではない。特に,通常画像については,同様の2次元画像が得られれば,スキャン方向はどの方向でもよい。また,多数スキャン信号波形取得位置と通常の計測位置の関係についても,同じエッジ上で同様の条件(周囲のパターン密度など)で形成されているパターンの範囲内であれば,特に図12に限定されるものではない。
【0046】
本変形例1を用いることにより,第1の実施例における平均波形生成処理がより高精度に行えるため,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。
【0047】
[第1の実施例の変形例2]
変形例2では図13および図14を使って,変形例1の場合と同様に,ラフネスを考慮したエッジの位置あわせ処理を高精度化する別の方法について説明する。
【0048】
変形例2では,エッジ部分の信号波形間の位置ずれを算出する場合に,S/Nのよい信号波形を別途生成して位置合わせ用のテンプレートとした。図14に示す第1の実施例の変形例2では,波形形状に影響を与えない範囲で事前にライン加算を行う。図13は非特許文献6に開示されている一般的な半導体ラインパターン配線幅ばらつきのもつ周波数特性である。図13からわかるように,配線幅のばらつきは低周波領域では比較的大きな振幅をもつが,高周波領域では急激に振幅が小さくなる。これは,配線幅ばらつきの振幅が十分に小さくなる範囲の周波数に相当する距離にある配線のエッジは低周波の影響をより大きく受けるため,比較的近くに位置する,すなわち急激に線幅は変動しないということが言える。
【0049】
この現象を利用すれば,図13のLに相当する距離よりも十分に近い距離にあるエッジ同士の波形であれば,図6に示した加算処理を行っても,波形形状に与える影響は十分に小さく抑えることができる。図13のLの一般的な値についても非特許文献6に開示されている。周波数LはL=3(1/μm),すなわち波長333nmであるからmを整数として, 333/m nm以下のピッチで波形信号をサンプリングすれば,m本の加算処理を行っても,加算される波形間のエッジ位置変動量は十分に小さいので,エッジの位置およびエッジ部波形形状の情報は維持される。
【0050】
そこで,図14に示すように,得られた信号波形のm本(図14ではm=3)のライン加算処理を事前に行うことで,電子線照射量を増加することなく,信号波形のS/Nが向上し,第1の実施例で開示されている平均波形生成のための位置合わせの精度を向上することが可能となる。
【0051】
なお,図14では便宜的に電子ビームのスキャン方向を左から右として説明したが,特に同方向に限定するものではない。特に,通常画像については,同様の2次元画像が得られれば,スキャン方向はどの方向でもよい。また,多数スキャン信号波形取得位置と通常の計測位置の関係についても,同じエッジ上で同様の条件(周囲のパターン密度など)で形成されているパターンの範囲内であれば,特に図14の順に限定されるものではない。
【0052】
本変形例2を用いることにより,第1の実施例における平均波形生成処理がより高精度に行えるため,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。
【0053】
[第1の実施例の変形例3]
変形例3では図15および図16を使って,変形例1および変形例2と同様に,ラフネスを考慮したエッジの位置あわせ処理を高精度化する別の方法について説明する。
【0054】
図15および図16に示す第1の実施例の変形例3では,エッジ位置ずれ量算出の前に平滑化フィルタを適用することでノイズの影響を低減する。図5で示したように,画像の平滑化処理は信号波形を変形させてしまうため,計測用画像への適用には注意が必要だが,位置ずれ量の算出時には位置ずれ量を比較する波形の両方に同じ平滑化処理が適用されていれば,特に問題は生じない。
【0055】
図15はパターンエッジ部分におけるエッジ位置を画像の画素との関係がわかるように示したものである。右側の灰色の部分がラインパターン(ライン部),左側の白色の部分が下地部分をあらわしている。図15の中に示されている着目画素A,B二つの画素に着目すると,A,Bともにパターンのエッジ部分に相当しているが,周辺のエッジ位置の関係は異なる。
【0056】
このような位置関係で画像を取得した場合に,得られた画像に,例えば3x3画素の平滑化フィルタを適用することを考えると,画素Aの周辺9画素はライン部分を多く含むのに対して,Bの周辺9画素は下地部をより多く含む。このため,画像平滑化を行った後では,画素Aは実際よりよりラインが太くなる方向に,画素Bは実際よりラインが細くなる報告に画像内での見た目のエッジ位置がそれぞれシフトしてしまう。このため,従来の2次元の平滑化処理を行うと,エッジ位置が等しいはずの画素A,B間でエッジ位置ずれ量を算出すると正しい答えが得られなくなってしまう。
【0057】
そこで,本変形例3では,図15に点線で示しているように,着目画素と同じy座標の画像信号のみを使って平滑化処理を行う。そうすれば,画素A,Bともに同様の信号波形に同じフィルタを適用することになるため,波形は元のものから変化してしまうが,エッジ位置ずれ量算出には悪影響は与えない。
【0058】
そこで本変形例3では,図16に示すように,原画像の信号波形ではなく,1次元の平滑化フィルタを適用してノイズ除去を行った各y座標のSEM信号波形を用いてエッジ位置変動量を算出する。図16は、図1(a)で説明した処理手順と異なる部分を説明するもので、図1(a)のうち、S0005で取得した画像からパターンの寸法を計測するステップ、すなわち図1(a)のS0006に対応する手順を詳細に説明する図である。図16では図1で説明した処理手順との違いを明確にするため,図1(a)に対応する処理手順に加え,図1(b)に対応するデータの流れも合せて示している。
【0059】
第1の実施例と最も異なるのは,S0005で取得したSEM画像に対して,エッジ位置変動量を算出するステップ(S1602)の前に,各y座標の信号波形にそれぞれ1次元の平滑化フィルタを適用するステップ(S1601)が加わる点である。
【0060】
すなわち、S1601で各y座標の信号波形にそれぞれ1次元の平滑化フィルタを適用してノイズ除去を行った後に、S1602でこのノイズ除去を行った信号波形を用いてエッジ位置変動量を算出し、算出されたエッジ位置変動量の平均値を計算し(S1603),各y座標における信号波形内のエッジ部の平均位置からの変動量を用いて,S1601で平滑化した信号波形ではなく,S0005で取得した原画像の信号波形を平行移動し(S1604),それらの信号波形を平均することにより平均波形を生成する(S1605)。
【0061】
この処理によって,パターン寸法計測や形状情報抽出に用いる信号波形は劣化することなく,平均的な位置における平均波形を算出することが可能となる。このようにして得られた平均波形を用いてパターンの寸法計測を行う(S1606)。
【0062】
このように,1次元の平滑化フィルタを適用してノイズ除去を行った各y座標のSEM信号波形を用いてエッジ位置変動量を算出することで,第1の実施例に比べ,安定で高精度な平均波形を生成することが可能となる。ひいては,本実施例を用いることにより,第1の実施例の効果がより高く得られ,より安定で高精度な寸法計測や立体形状推定,立体形状を用いたプロセス変動推定などを実現することが可能となる。図16では第一の実施例を高精度化する方法について説明したが,S1606の寸法計測の代わりに、第2の実施例として後述する立体形状を考慮した寸法計測および立体形状推定や,第3の実施例として後述する画像特徴量を利用した半導体製造プロセス評価などに利用してももちろんよい。
【0063】
また,変形例1乃至変形例3で説明した実施例は互いに相反するものではなく,同時にこれらを組合わせて用いてもよいことは言うまでもない。また、変形例1と変形例3とを同時に用いる場合には,テンプレートとなる波形にも計測対象画像と同じ1次元フィルタを適用することが重要である。
【0064】
また,本変形例3を実施例1の説明した位置合せ処理に適用することで,電子線照射量を増加することなく,位置ずれ量検出に用いる信号波形のS/Nを向上させることができ,第1の実施例で説明した平均波形生成のための位置合わせの精度を向上させることが可能となる。
【0065】
[第1の実施例の変形例4](位置調整後の平均波形を用いてLER/LWR計測+GUI)
次に,変形例4として,第1の実施例で説明したパターン寸法計測を応用して,平均寸法のみならず各y座標の寸法およびエッジ位置の変動を高精度に推定する方法について図18を用いて説明する。
【0066】
第1の実施例で示したように,算出される平均波形はパターンエッジの波形情報を維持したまま,処理に用いたSEM画像の平均的な位置のエッジ波形をノイズの少ない状態で得られる。そこで,得られた平均波形のエッジ部波形をテンプレートとして,原画像内の各y座標のエッジ位置ずれ量算出(S1826)とその結果を用いたLERやLWR計測(S1827)を行えば,安定なLERやLWRを安定して計測することが可能となる。
【0067】
すなわち、図18にその処理フローを示したように、S1809で各y座標の信号波形のエッジ位置変動量を算出し、算出されたエッジ位置変動量の平均値を計算し(S1810),エッジ部波形信号を算出した平均位置に平行移動し(S1811),それらの信号波形を平均することにより平均波形を生成し(S1812)、この平均波形を用いてパターンの寸法計測を行う(S1813)。
【0068】
一方、得られた平均波形のエッジ部波形をテンプレートとして,原画像内の各y座標のエッジ位置ずれ量算出し(S1826)、その結果を用いたLERやLWRを算出する(S1827)ことにより,ノイズが少なくS/Nの良いエッジ部波形をテンプレートに用いることができるので,安定なLERやLWRの計測が可能となる。
【0069】
また、この処理によって,パターン寸法計測や形状情報抽出に用いる信号波形は劣化することなく,平均的な位置における平均波形を算出することが可能となる。このようにして得られたノイズ成分が少ない平均波形を用いて、より精度の高いパターンの寸法計測(S1813)を行うことができる。
【0070】
図19は結果表示の一例であり,原画像と比較して平均波形と平均波形をテンプレートとして算出したエッジ位置変動座標の結果から合成した画像を表示する。合成された画像は原画像に比べ,ノイズの少ない画像であるため,パターン形状の変化の様子などを明瞭に表示することが可能となり,パターン形状の状態の確認が容易にできる。図19には表示していないが,計測された各y座標におけるエッジ位置を画像の上に重ねて表示してももちろんよい。
これら第1の実施例は,後述する第2,第3の実施例と併用してももちろんよい。
【実施例2】
【0071】
次に,図7を用いて,本発明によるパターンの立体形状を考慮した高精度計測手法と,立体形状の推定手法について説明する。
【0072】
図5および図6に示したようなノイズ除去処理を行なうことにより信号波形のを変形させることは,エッジ位置検出結果のみならず,これらの信号波形がもつパターンの立体形状情報を得ることも難しくしてしまう。
【0073】
例えば,非特許文献3においてはパターン形状と波形の関係に着目して,パターンの断面形状を考慮した寸法計測方法が開示されているが,非特許文献4に示されている通り,計測対象画像のS/Nが悪い場合には十分な性能が得られないケースがある。このようなSEM画像に対して,図5あるいは図6に示したようなノイズ除去処理を行うと,計測に用いられるSEM信号波形が変化してしまうため,その形状から対象パターンの立体形状情報を得ることは難しくなる。
【0074】
これに対して本発明では,図7に示すように,ラフネスを考慮したノイズ除去処理により生成される平均波形とSEMシミュレーションを用いて高精度な計測を実現する。まず,図7(a)に示すように,予めオフラインでシミュレーションによりSEM波形のライブラリを構築する。はじめに,想定されるターゲット形状の変動範囲と測長SEMでの画像取得条件(電子線照射の加速電圧など)からシミュレーション条件を設定し(S7001),設定した条件で様々なパターン形状および寸法のSEMシミュレーションを実施する(S7002)。
【0075】
様々なパターン形状とは,対象パターンで計測したい形状特徴量,例えば側壁傾斜角やトップや裾の丸まりなどである。計測対象のプロセスにおいて変動しやすい形状がわかっている場合(例えばトップコーナが丸まりやすい等)には,その形状変化を考慮することが重要である。これらの形状パラメタについて,実際のプロセスで生じうる範囲を想定して,それをカバーする範囲でシミュレーションを実施する。次に,これらのシミュレーション結果を用いてSEM信号波形のライブラリ304を構築する(S7003)。
【0076】
計測時には,図1(a)に示したS0001からS0007と同様の手順で、SEM波形ライブラリ構築時と同様の条件でSEM画像を取得する。このとき、図1(b)に示した計測(S0006)に対応する詳細なステップは、第1の実施例におけるステップS0009からS0012と同様に、エッジ位置変動量を算出し(S7009)、算出した結果からエッジ位置変動の平均値を算出し(S7010),エッジ部信号波形を算出した平均位置に平行移動させ(S7011),平均波形を生成する(S7012)ことにより,パターンエッジ位置の変動を考慮してノイズを低減した平均波形を生成する。生成された平均波形とシミュレーションにより構築したSEM波形ライブラリ304のデータを比較し,最も波形が一致する波形生成に用いられたシミュレーション条件の入力形状データから,計測対象パターンの寸法と断面形状推定結果を得る(S7013)。
【0077】
図9は第2の実施例による計測結果の表示画面の一例である。図9の例では,評価に用いられた原画像500に加え,平均波形から合成した画像501をあわせて表示している。平均波形から合成した画像は,原画像に比べノイズが少なく,平均寸法でLER/LWRのない画像となり,原画像に比べ明瞭な画像で対象パターンの状態を確認するのに役立つ。また,平均波形の合成画像には,平均波形プロファイルそのものおよび寸法計測結果(例えばボトム寸法)502や倍率を示すスケール503も合わせて表示するとさらに結果がわかりやすく便利である。画面左下に表示しているのは,計測結果の数値504であり,その右に表示してあるのは第2の実施例で推定された断面形状505である。この断面形状推定結果にも画像と同様スケール503を表示すると便利である。また,原画像から推定されたLERによるエッジ位置のばらつき範囲506を合わせて表示してもよい。このLERの高精度な計測方法については第1の実施例の第4の変形例に示した。
【0078】
第2の実施例においても,第1の実施例と同様に,従来の平滑化処理により生じていた問題を解決することが可能となる。すなわち、本発明によるサンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行うことにより生じてしまう本来のパターンに由来するものではない寸法変動成分を低減し,高精度で高感度な計測を安定に行うことが可能となる。特に,第2の実施例のように波形形状から対象パターンの立体形状を推定する場合には,平滑化による波形の変化を防ぐことは非常に重要であることは言うまでもない。
【0079】
本発明を用いれば,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定かつ高精度な寸法計測および立体形状の推定を実現することが可能となる。その結果半導体プロセスの変動を高感度に検知することが可能となる。
【0080】
また,図7に示した第2の実施例では,本発明の処理により得られる1本の平均波形についてシミュレーションライブラリとの比較処理(S7013)を行う。この,シミュレーションライブラリとの比較処理(S7013)においては,波形とシミュレーションの比較によりシミュレーションに用いられた多くのパラメタを推定する必要があるため,比較的多くの処理時間を必要とする。
【0081】
従来の技術ではラフネスのあるパターンの平均的な寸法を算出するためには,画像内複数の波形について同処理を実施する必要があったが,本発明を用いれば,既に画像内全体の平均形状および寸法を反映している波形1本のみについてS7013の処理を実施すればよいため,計算時間を大幅に削減することが可能となる。
【0082】
なお,第1の実施例と同様に,処理に用いる画像は1枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
本実施例ではSEMの2次電子画像を用いて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【0083】
[第2の実施例の変形例1]
第2の実施例の変形例1では,第2の実施例の立体形状推定方法をより高精度化する方法について図17を用いて説明する。第1の実施例の変形例3の実施例で示したように,各y座標の信号波形毎に1次元のフィルタをかける場合には,周囲のエッジ位置変動の影響を受けずにノイズ除去が可能である。第2の実施例の変形例1では,この1次元のフィルタによる平滑化処理を加えることで,第2の実施例で示した立体形状推定手法の安定性および精度を向上する方法を開示する。
【0084】
図17上側は第2の実施例を示しており,SEM信号波形とSEM波形シミュレーションライブラリの波形を比較して一致するものを決定する。これに対し,第2の実施例の変形例1では図17下側に示すように,SEM信号波形およびシミュレーションライブラリの両方に同じ1次元の平滑化フィルタを適用し,ノイズ除去された波形同士を比較する。これまで説明してきたように,平滑化処理はエッジ部の波形形状を変化させてしまうが,第2の実施例の変形例1ではシミュレーションライブラリにも同じ平滑化処理が施されており,シミュレーションライブラリも同じように変形するため,ノイズ除去後による波形形状変化があっても立体形状推定には問題がない。このように,信号波形およびシミュレーション波形両方に同じ1次元平滑化処理を施すことにより,第2の実施例によるパターン寸法計測および立体形状推定をさらに高精度化することが可能となる。
【実施例3】
【0085】
次に,図10および図11を用いて,本発明によるパターンの形状情報を利用した半導体製造プロセスの評価方法について説明する。
【0086】
前記のように,図5および図6に示したようなノイズ除去処理による信号波形の変形は,エッジ位置検出結果のみならず,これらの信号波形がもつパターンの立体形状情報を得ることも難しくなる。
【0087】
非特許文献5には,図8に示したようにSEM信号波形を複数の領域に分けてパターン形状情報を抽出することが記載されている。このような場合にも,安定な結果を得るためにはノイズ除去が重要だが,図5あるいは図6に示したような処理を行ってしまうと,パターンのラフネスの影響により波形が不安定に変化してしまうため,パターンの立体形状変化に対して良好な感度を得ることが困難になる。
【0088】
そこで,本発明では,図10に示すように,ラフネスを考慮したノイズ除去処理により生成される平均波形とSEMシミュレーションを用いて高精度な画像特徴量算出を実現し,得られた高精度な画像特徴量を用いた露光装置のモニタを実現する。SEM画像取得の手順は図1(a)を用いて説明した手順と同様である。得られたSEM画像を用いて,図10に示すような処理手順、すなわち第1の実施例の図1(b)を用いて説明した計測のステップS0009からS0012までと同様にS1009からS1012までの手順で,エッジ位置変動量を算出し(S1009),それに基づいてエッジ位置変動量の平均値を算出し(S1010),エッジ部信号波形を算出した平均位置に平行移動し(S1011),平行移動した波形から平均波形を生成する(S1012)。これにより、波形の形状を保ったままノイズを除去した平均波形を生成することができる。
次にS1013において、得られた平均波形からパターン形状に依存して変化する画像特徴量を算出する。画像特徴量としては,例えば本発明者らが執筆した非特許文献5および特許文献1に開示されている、図8に示すようなSEM信号波形を複数の領域に分けて夫々の領域からパターン形状情報を抽出する方法を用いればよい。
【0089】
図10に示したように,信号波形の形状を保ったままノイズを低減した平均波形を用いることにより,従来に比べ,より高感度で安定な画像特徴量の算出が可能となる。この安定で高感度な画像特徴量を用いた露光装置のモニタ方法を図11を用いて説明する。本手法は,プロセス条件と当該プロセス条件により生成されたパターンの立体形状を表す画像特徴量の関係をあらかじめデータベースに記録するデータベース作成手順(図11(a))とそのデータベースを用いてプロセス条件の変動を推定する露光装置パラメタ推定手順(図11(b))からなる。
【0090】
データベース作成手順においては、図11(a)に示すように,はじめに主要な露光条件であるフォーカスおよび露光量をチップごとに変更して露光したFEM(Focus Exposure Matric)ウェハを生成する(S1101)。次にS1102において、各条件で生成されたパターンのSEM画像取得と画像特徴量算出を図10に示した手順S1009からS1013により行う。最後に本発明の方法により算出された画像特徴量と露光装置の条件(フォーカスおよび露光量)の関係を用いてデータベースを作成し(S1103)、データベース305に記録する。実際にプロセスを管理するときには,図11(b)に示した手順に基づいて、S1121で評価対象パターンの画像特徴量を図10に示した手順により算出し,得られた画像特徴量をデータベース305に記録されている画像特徴量と比較して露光装置の条件変動を推定し(S1122),推定結果を出力する(S1123)。
【0091】
第3の実施例においても,第1および第2の実施例と同様に,従来の平滑化処理により生じていた問題を解決することが可能となる。サンプルのラフネスを考慮して生成される平均波形生成処理は,ノイズを低減するだけでなく,エッジ部の信号波形を保ったまま,処理対象画像内における平均的な位置の波形を算出するため,従来技術のように平滑化処理を行うことにより生じてしまう本来のパターンに由来するものではない信号波形の変動成分を低減し,高精度で高感度に対象パターン形状に依存した画像特徴量を算出することが可能となる。
【0092】
第3の実施例のように波形形状から対象パターンの立体に関連した情報を抽出する場合には,平滑化による波形の変化を防ぐことは非常に重要であることは言うまでもない。
【0093】
本発明を用いれば,電子線照射に耐性の低い材料に対しても,比較的少ない電子照射量,すなわち少ないダメージで,S/Nの悪いSEM画像を用いても安定かつ高精度にパターンの立体形状情報を抽出することができ,その結果半導体プロセスの変動を高感度に検知することが可能となる。
【0094】
なお,第1の実施例と同様に,処理に用いる画像は1枚である必要はなく,サンプルの同一エッジ上の画像を複数に分けて撮像してより多くの画像を用いてももちろんよい。この場合は,使用する信号量が増えるため,より大きなノイズ低減効果を得ることが可能となる。
【0095】
本実施例ではSEMの2次電子画像を用いて説明したが,使用する信号は反射電子でももちろんよい。あるいは,別のシステムとして電子ビームの代わりに,軽イオンを用いたFIBを用いてもよい。FIBを用いると,固体内での散乱角が比較的小さいため,分解能のよい計測が可能となる。
【実施例4】
【0096】
次に,第1の実施例とは異なる方法で平均波形を生成するパターン計測方法について図20から図24を使用して説明する。
【0097】
図20は第4の実施例の概念を説明する図である、この図20では効果が明確になるようにノイズのない波形で説明しているが,実際はノイズのある波形である。図20(a)および図20(b)に破線で示した従来法による信号平均波形は図2に示したものと同じである。これに対して本発明では同じ信号量の信号波形の平均位置を算出することで平均波形を生成する。図20(b)において,細線で示したそれぞれの信号波形が同じ信号量を持つ点(同じ横線の上に示されている白抜きの点)を算出し,その平均座標(黒点)をつなげば,元の信号波形形状を維持したまま,元の波形の平均位置に移動した平均波形(太線)を得ることができる。
【0098】
図21に実際の手順を示す。一般にラインパターン計測に用いるSEM信号波形は一つの信号波形に対応する座標が2つ以上存在する。図20では簡単のため,エッジ部波形ピークの左側だけを用いて説明しているが,右側やもう一方のエッジ部ピークの両側にも同一信号量を持つ点がある。そこで,はじめに図22に示すように信号波形を左右エッジのピーク内側,外側,下地部分の6つの領域に分けておく(S0030)。次に,下地以外のそれぞれの領域について,各y座標の信号波形においてある信号量を持つ位置を算出する(S0031)。
【0099】
図20ではノイズのない図で説明したが,実際の波形は図23に示すようにノイズがあるために,ある信号量との交点は一般に複数になるが,ランダムなノイズであれば,これらの平均は実際にその信号量を持つ座標に近いと考えられる。そこで,このS0031の処理では,算出される複数の交点すべてを求める。次に,この処理を全ての信号波形について実施して平均的な位置を算出する(S0032)。
【0100】
1つの信号量について得られた全ての交点の座標についてヒストグラムみると,例えば図24に示すように,あるばらつきを持つ分布となる。このばらつきには,計測対象のエッジ位置のばらつきとノイズによりばらつきの両方が含まれている。十分に多いデータが得られていれば,これらの平均的な位置を推定することで,エッジ位置およびノイズ両方のばらつきを除去した元々の信号波形を復元することが可能となる。単純な平均値の代わりに座標の中央値やヒストグラム(平滑化などを行ってもよい)の最頻値などを用いてもよく,得られたデータの数によって適切な方法を選択すればよい。このS0031,S0032を全ての信号量およびエッジピークの4つの領域について行う。また,下地部分についてはパターンがないため,単純に従来法と同様の信号平均処理により波形を推定する(S0033)。
【0101】
得られた各領域の信号波形を統合して,平均波形を生成(S0034)し,この平均波形を用いて第1の実施例同様に対象パターンの平均寸法を計測することができる(S0035)。第4の実施例を用いることで,第1の実施例と同様に安定で高精度な計測を実現することができる。
【0102】
第2および第3の実施例についても,エッジ位置変動を合わせて生成した平均波形のかわりに,第4の実施例で開示した方法により生成された平均波形を用いてパターンの寸法計測や立体形状推定,またはパターン形状に関連した画像特徴量の算出を行えば,第1,第2および第3の実施例と同様の効果を得ることが可能となる。
【実施例5】
【0103】
次に,これまでの実施例をホールパターンに適用する方法について説明する。計測対象がホールパターンである場合には,ホールのエッジ部分がラインのエッジ同様に明るく光るため,ホールパターンのSEM画像510は図25(a)に示すようなものとなる。
【0104】
以下に,このような画像に本発明を適用する手順を示す。はじめに,従来法でホールの仮中心511を算出する。ここでは多少検出精度が低くとも問題はない。次に,算出されたホールの仮中心511を基準として,図25(a)に示すように半径方向rとそれに直交する角度方向θの軸を決定し,得られたホールパターンのSEM画像510を極座標変換して,図25(b)に示すような変換後のSEM画像512を生成する。このとき,変換後のホールの仮中心513は図25(b)に破線で示すように,直線となる。
【0105】
図25(b)に示すように,極座標変換後の画像は、図4(c)等に示したラインパターンと同様の画像となる。このように,座標変換によりホールパターンの画像をラインパターンと同様な形状に変換することができれば,この画像に,これまでに説明した全ての実施例を同様に適用することが可能となる。上記の実施例を適用した後に,より高い精度でホールのエッジ位置を確定することができれば,その後で再度ホールの中心位置やホール径を算出すれば,従来法に比べより精度の高いホール計測を実現することが可能となる。
【0106】
第5の実施例を用いることで,第1の実施例と同様に安定で高精度な計測を実現することができる。第2および第3の実施例についても,エッジ位置変動を合わせて生成した平均波形のかわりに,第5の実施例で開示した方法により生成された平均波形を用いてパターンの寸法計測や立体形状推定,またはパターン形状に関連した画像特徴量の算出を行えば,第1,第2,第3および第4の実施例で説明した場合と同様の効果を得ることが可能となる。
【図面の簡単な説明】
【0107】
【図1】本発明のパターン計測方法の第1の実施例の手順を説明するフロー図である。
【図2】(a)は計測対象のラインパターンの平面図、(b)は従来のライン加算信号波形を示すグラフ、(c)は本発明のパターン計測方法の第1の実施例におけるライン加算信号波形を示すグラフである。
【図3】本発明のパターン計測方法を実施する測長SEMのシステム構成を示すブロック図である。
【図4】(a)は測長SEMの理想画像とその信号は径を示す図、(b)は測長SEM画像とその信号波形図である。
【図5】エッジラフネスを考慮しない場合の平滑化処理前後のSEM信号波形を示す信号波形図。
【図6】エッジラフネスを考慮した場合の平滑化処理前後のSEM信号波形を示す信号波形図。
【図7】本発明によるパターン計測方法の第2の実施例の手順を説明するフロー図である。
【図8】SEM信号波形における各種の画像特徴量を説明する公知の図である。
【図9】本発明のパターン計測方法の第2の実施例における結果を表示する画面の正面図である。
【図10】本発明のパターン計測方法の第3の実施例の画像特徴量算出手順を説明するフロー図である。
【図11】本発明のパターン計測方法の第3の実施例における露光装置パラメタを推定する手順を示すフロー図である。
【図12】(a)はラインパターンを模式的に示す平面図、(b)は本発明の第1の実施例の第1の変形例を説明する多数回スキャンして加算してS/Nの良いテンプレートとして作成したSEM信号波形を示す信号波形図、(c)は通常のSEM画像とSEM信号波形を示す図である。
【図13】非特許文献6に開示されている半導体パターンの線幅ラフネスの一般的な特性を説明する図である。
【図14】本発明のパターン計測方法の第1の実施例の第2の変形例におけるラインスキャンピッチを示す模式的なラインパターンの平面図である。
【図15】本発明のパターン計測方法の第1の実施例の第3の変形例における1次元平滑化処理を説明する図であり、パターンエッジ部分におけるエッジ位置を画像の画素との関係が判るように模式的に示したパターンのエッジ部分を含む画像である。
【図16】本発明のパターン計測方法の第1の実施例の第3の変形例を説明する処理手順を示すフロー図である。
【図17】本発明のパターン計測方法の第2の実施例の変形例を説明する図であり、(a)はSEM信号波形を示す波形図、(b)はSEM信号波形に対応するシミュレーション波形ライブラリに記憶されている波形図、(c)は1次元平滑化処理を施したSEM信号波形を示す信号波形図、(d)は1次元平滑化処理を施したシミュレーション波形ライブラリに記憶されている信号波形図である。
【図18】本発明のパターン計測方法の第1の実施例の第4の変形例の処理フローを示すフロー図である。
【図19】本発明のパターン計測方法の第1の実施例の第4の変形例における結果を表示する画面の正面図である。
【図20】(a)は計測対象パターンを模式的に示したパターンの平面図、(b)は本発明のパターン計測方法の第4の実施例における平均波形生成方法を示す信号波形図である。
【図21】本発明のパターン計測方法の第4の実施例の処理手順を示すフロー図である。
【図22】本発明のパターン計測方法の第4の実施例における領域分割を説明する信号波形図である。
【図23】本発明のパターン計測方法の第4の実施例における処理における左エッジ内領域を示す信号波形図である。
【図24】本発明のパターン計測方法の第4の実施例における処理を説明する図で、図23に示した信号波形図における1つの信号量について得られた全ての交点の座標に関する頻度を示すヒストグラムである。
【図25】(a)はホールパターンのSEM画像、(b)はホールパターンのSEM画像を極座標変換して得た画像である。
【符号の説明】
【0108】
100・・・測長SEM画像(理想画像) 101・・・測長SEM信号波形(理想画像) 102・・・測長SEM画像 103・・・y座標Aにおける測長SEM信号波形 104・・・y座標Bにおける測長SEM信号波形 105・・・平滑化前の信号波形 106・・・平滑化後の信号波形 200・・・電子光学系 201・・・電子銃 202・・・コンデンサレンズ 203・・・対物レンズ 204・・・偏向器 205・・・ExB偏向器 206・・・二次電子検出器 207・・・A/D変換器 208・・・アライメントコイル 209・・・非点補正コイル 210・・・対物レンズ絞り 300・・・画像処理部 301・・・記憶媒体 302・・・表示装置 303・・・一次電子ビーム 400・・・ラインパターン部 401・・・下地部 500・・・原画像 501・・・平均波形から合成した画像 507・・・平均波形とLER計測結果から合成した画像 510・・・ホールパターンのSEM画像 512・・・座標変換後のSEM画像
【特許請求の範囲】
【請求項1】
試料上の計測対象パターンが形成された領域に集束させた荷電粒子線を照射して走査することにより前記試料から発生する二次荷電粒子を検出して前記計測対象パターンが形成された領域の画像を得、
該画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算して前記計測対象パターンの加算信号を得、
該加算して得た前記計測対象パターンの加算信号の波形から前記計測対象パターンの寸法情報を得る方法であって、
前記画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算するときに前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とするパターン寸法の計測方法。
【請求項2】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記加算する各信号波形ごとに前記計測対象パターンのエッジの位置のずれ量を求め、該求めた各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量の平均値を求め、該求めた平均値に対する前記各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を補正することにより行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項3】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記計測位置とは異なる位置で前記荷電粒子線を前記計測位置よりも多く照射して得た画像から前記計測対象パターンのS/Nの良い信号波形を取得し、該取得したS/Nの良い信号波形をテンプレートとして前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項4】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記画像の前記荷電粒子線の走査方向の信号波形に平滑化フィルタを適用してノイズを除去し、該ノイズを除去した各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めたノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記ノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を求め、該求めたずれ量に基づいて前記画像の前記荷電粒子線の走査方向の信号波形を補正することにより行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項5】
前記計測対象パターンの加算信号の波形から得た前記計測対象パターンの寸法情報と前記加算信号の波形とを、予め求めておいたパターン形状と該パターンに荷電粒子線を照射して走査することにより得られる画像の信号波形形状との関係と照合することにより、前記計測対象パターンの断面形状を推定することを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項6】
前記計測対象パターンについて推定した断面形状の情報を、前記計測対象パターンの寸法情報と、前記取得した計測対象パターンが形成された領域の画像と一緒に画面上に表示することを特徴とする請求項5記載のパターン寸法の計測方法。
【請求項7】
荷電粒子線照射部と二次荷電粒子検出部とを有して、試料上の計測対象パターンが形成された領域に前記荷電粒子線照射部により集束させた荷電粒子線を照射して走査し、該集束させた荷電粒子線が照射して走査された試料から発生する二次荷電粒子を検出して前記計測対象パターンが形成された領域の画像を得る画像取得手段と、
該画像取得手段で取得した画像を処理して前記計測対象パターンの寸法情報を得る画像処理手段を備えたパターン寸法の計測装置であって、
前記画像処理手段は、該画像取得手段で取得した画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算して前記計測対象パターンの加算信号を得る信号波形処理部と、該信号波形処理部において加算して得た前記計測対象パターンの加算信号の波形から前記計測対象パターンの寸法情報を得るパターン寸法情報抽出部とを有し、前記信号波形処理部において、前記画像取得手段で取得した画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算するときに前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とするパターン寸法の計測装置。
【請求項8】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記加算する各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めた各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を補正することにより行うことを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項9】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記計測位置とは異なる位置で前記荷電粒子線を前記計測位置よりも多く照射して得た画像から前記計測対象パターンのS/Nの良い信号波形を取得し、該取得したS/Nの良い信号波形をテンプレートとして前記計測対象パターンのエッジのラフネスによる信号波形のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項10】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記画像の前記荷電粒子線の走査方向の信号波形に平滑化フィルタを適用してノイズを除去し、該ノイズを除去した各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めたノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記ノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を求め、該求めたずれ量に基づいて前記画像の前記荷電粒子線の走査方向の信号波形を補正することにより行うことを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項11】
前記パターン寸法情報抽出部において、前記信号波形処理部で前記計測対象パターンの加算信号の波形から求めた前記計測対象パターンの寸法情報と前記加算信号の波形とを、予め求めておいたパターン形状と該パターンに荷電粒子線を照射して走査することにより得られる画像の信号波形形状との関係と照合することにより前記計測対象パターンの断面形状を推定することを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項12】
表示画面を有する表示手段を更に備え、該表示手段の表示画面上に、前記パターン寸法情報抽出部において推定した前記計測対象パターンの断面形状の情報と前記計測対象パターンの寸法情報、および前記画像取得手段で取得した計測対象パターンが形成された領域の画像とを表示することを特徴とする請求項11記載のパターン寸法の計測装置。
【請求項13】
円周状にエッジが存在するパターンの計測方法であって,円周の内部に存在する点を基準とし,該基準点を用いて,基準点からの距離および基準点を中心とした回転方向の座標を用いて荷電粒子線画像の座標変換を行い,変換後の画像を用いて計測を行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項1】
試料上の計測対象パターンが形成された領域に集束させた荷電粒子線を照射して走査することにより前記試料から発生する二次荷電粒子を検出して前記計測対象パターンが形成された領域の画像を得、
該画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算して前記計測対象パターンの加算信号を得、
該加算して得た前記計測対象パターンの加算信号の波形から前記計測対象パターンの寸法情報を得る方法であって、
前記画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算するときに前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とするパターン寸法の計測方法。
【請求項2】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記加算する各信号波形ごとに前記計測対象パターンのエッジの位置のずれ量を求め、該求めた各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量の平均値を求め、該求めた平均値に対する前記各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を補正することにより行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項3】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記計測位置とは異なる位置で前記荷電粒子線を前記計測位置よりも多く照射して得た画像から前記計測対象パターンのS/Nの良い信号波形を取得し、該取得したS/Nの良い信号波形をテンプレートとして前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項4】
前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記画像の前記荷電粒子線の走査方向の信号波形に平滑化フィルタを適用してノイズを除去し、該ノイズを除去した各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めたノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記ノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を求め、該求めたずれ量に基づいて前記画像の前記荷電粒子線の走査方向の信号波形を補正することにより行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項5】
前記計測対象パターンの加算信号の波形から得た前記計測対象パターンの寸法情報と前記加算信号の波形とを、予め求めておいたパターン形状と該パターンに荷電粒子線を照射して走査することにより得られる画像の信号波形形状との関係と照合することにより、前記計測対象パターンの断面形状を推定することを特徴とする請求項1記載のパターン寸法の計測方法。
【請求項6】
前記計測対象パターンについて推定した断面形状の情報を、前記計測対象パターンの寸法情報と、前記取得した計測対象パターンが形成された領域の画像と一緒に画面上に表示することを特徴とする請求項5記載のパターン寸法の計測方法。
【請求項7】
荷電粒子線照射部と二次荷電粒子検出部とを有して、試料上の計測対象パターンが形成された領域に前記荷電粒子線照射部により集束させた荷電粒子線を照射して走査し、該集束させた荷電粒子線が照射して走査された試料から発生する二次荷電粒子を検出して前記計測対象パターンが形成された領域の画像を得る画像取得手段と、
該画像取得手段で取得した画像を処理して前記計測対象パターンの寸法情報を得る画像処理手段を備えたパターン寸法の計測装置であって、
前記画像処理手段は、該画像取得手段で取得した画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算して前記計測対象パターンの加算信号を得る信号波形処理部と、該信号波形処理部において加算して得た前記計測対象パターンの加算信号の波形から前記計測対象パターンの寸法情報を得るパターン寸法情報抽出部とを有し、前記信号波形処理部において、前記画像取得手段で取得した画像の前記荷電粒子線の走査方向の信号波形を該走査の方向と直角な方向の信号波形と加算するときに前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とするパターン寸法の計測装置。
【請求項8】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記加算する各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めた各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を補正することにより行うことを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項9】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記計測位置とは異なる位置で前記荷電粒子線を前記計測位置よりも多く照射して得た画像から前記計測対象パターンのS/Nの良い信号波形を取得し、該取得したS/Nの良い信号波形をテンプレートとして前記計測対象パターンのエッジのラフネスによる信号波形のばらつきを補正して加算することにより前記前記計測対象パターンの加算信号を得ることを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項10】
前記信号波形処理部において、前記計測対象パターンのエッジのラフネスによる信号波形のエッジ位置のばらつきを補正することを、前記画像の前記荷電粒子線の走査方向の信号波形に平滑化フィルタを適用してノイズを除去し、該ノイズを除去した各信号波形ごとに前記計測対象パターンのエッジの位置を求め、該求めたノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置の平均値を求め、該求めた平均値に対する前記ノイズを除去した各信号波形ごとの前記計測対象パターンのエッジの位置のずれ量を求め、該求めたずれ量に基づいて前記画像の前記荷電粒子線の走査方向の信号波形を補正することにより行うことを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項11】
前記パターン寸法情報抽出部において、前記信号波形処理部で前記計測対象パターンの加算信号の波形から求めた前記計測対象パターンの寸法情報と前記加算信号の波形とを、予め求めておいたパターン形状と該パターンに荷電粒子線を照射して走査することにより得られる画像の信号波形形状との関係と照合することにより前記計測対象パターンの断面形状を推定することを特徴とする請求項7記載のパターン寸法の計測装置。
【請求項12】
表示画面を有する表示手段を更に備え、該表示手段の表示画面上に、前記パターン寸法情報抽出部において推定した前記計測対象パターンの断面形状の情報と前記計測対象パターンの寸法情報、および前記画像取得手段で取得した計測対象パターンが形成された領域の画像とを表示することを特徴とする請求項11記載のパターン寸法の計測装置。
【請求項13】
円周状にエッジが存在するパターンの計測方法であって,円周の内部に存在する点を基準とし,該基準点を用いて,基準点からの距離および基準点を中心とした回転方向の座標を用いて荷電粒子線画像の座標変換を行い,変換後の画像を用いて計測を行うことを特徴とする請求項1記載のパターン寸法の計測方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2008−203109(P2008−203109A)
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願番号】特願2007−40190(P2007−40190)
【出願日】平成19年2月21日(2007.2.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成20年9月4日(2008.9.4)
【国際特許分類】
【出願日】平成19年2月21日(2007.2.21)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]