
パターン形状計測装置及びパターン形状計測方法

【課題】フォトマスク又はウェハのホール及びドットパターン形状のラフネスを計測する際に、測定者が計測する箇所を指定する必要がなく、迅速かつ高精度なラフネス計測が可能となるパターン形状計測装置及びパターン形状計測方法を提供する。
【解決手段】計測対象パターンを入力する計測対象パターン入力部11と、計測対象パターンの輪郭線を抽出する輪郭線抽出部12と、輪郭線の重心を算出する重心算出部13を有する。また、輪郭線と重心との距離を算出する距離算出部14と、計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する距離算出部15と、距離算出部14が算出した距離と距離算出部15が算出した距離との差分を算出する差分算出部16と、差分からラフネス値を算出するラフネス値算出部17とを有する。
【解決手段】計測対象パターンを入力する計測対象パターン入力部11と、計測対象パターンの輪郭線を抽出する輪郭線抽出部12と、輪郭線の重心を算出する重心算出部13を有する。また、輪郭線と重心との距離を算出する距離算出部14と、計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する距離算出部15と、距離算出部14が算出した距離と距離算出部15が算出した距離との差分を算出する差分算出部16と、差分からラフネス値を算出するラフネス値算出部17とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体製造のリソグラフィ工程に用いられるフォトマスクのマスクパターン及び、フォトマスクを露光転写しウェハ上に形成されるウェハパターンのパターン画像からその形状の特徴を定量的に計測するためのパターン形状計測装置及びパターン形状計測方法に関する。
【背景技術】
【0002】
近年の半導体LSI(Large Scale Integration)パターンの微細化に伴い、パターン原版としてのフォトマスクも同様に微細化への対応を迫られており、同時に高精度化への要求は非常に厳しい。
従来、フォトマスク品質における重要項目として、欠陥・寸法精度・アライメントの3項目が特に重視されており、半導体の微細化が進む現在ではそれぞれの項目を計測するための高精度なフォトマスク専用検査装置が開発され使用されている。
しかし、フォトマスクパターンの微細化による高精度化への要求は、前記3項目以外のあらゆる品質項目(パターン形状、パターンデータ保証、耐久性、クリーン度等)においても同様になりつつあり、特にパターン形状の精度については直接LSI回路の精度および性能に関わることから、かなり重視されるようになってきた。
【0003】
フォトマスクのパターン形状は、半導体回路のマスクレイアウト設計において設計図面通りのパターンが精度良くマスク上に再現されていることが望ましい。しかし、実際にはリソグラフィ技術を用いてガラス上の金属薄膜に微細なパターンを加工しているため、マスクパターンと設計パターンとは完全に同一形状ではなく、寸法差やコーナー部分の丸みなど、微小な違いが存在する。
この違いはマスク上で数十〜数百ナノメートル程度の大きさであることがほとんどであるが、近年の超LSIの微細化の進展によって、これが半導体回路の特性に影響を与えることが懸念され始めている。すなわち、微細なパターンであるほど、パターン自体に対して前記のパターン形状の違いが相対的に大きくなり、特性値に影響するようになっている。
【0004】
マスク品質上の点検項目としてパターン形状を表す場合、様々な項目がある。例えば、パターンコーナー部分の丸み(=コーナーラウンド)、直線パターンエッジ部分のギザツキ(=エッジラフネス)、描画時のパターンズレ(=バッティングエラー)、形状歪み、テーパー形状など、パターンのそれぞれの部分ごとにチェックすべき項目がある。なお、コーナーラウンド、エッジラフネス、バッティングエラーは、それぞれフォトマスク検査工程で通常使われている用語である。
【0005】
一方、リソグラフィ工程によりウェハ上に露光転写されたパターンにおいてもパターン形状の精度が非常に重要になってきている。特に、ArFリソグラフィにおいてはパターンエッジラフネスが電気特性に影響を与えるため、それを定量的に計測する手法が検討されている。
【0006】
通常、フォトマスク及びウェハのパターンにおいてエッジラフネスとは、本来直線パターンでのエッジのギザツキのことを示している。しかしながら、近年の微細化によりホールパターンやドットパターンのように四角の閉図形においても、パターンの歪みやギザツキが目立つようになってきており、最終的な電気特性に影響を与える懸念があるため、その定量化が望まれている。
これまで、エッジラフネスといえば直線パターンに適用する概念だと考えられていたが、ホールパターンやドットパターンのような閉図形に対しても定量的に評価する必要性が高まってきている。
【0007】
従来、フォトマスクやウェハのホール又はドットパターンのラフネス評価は、光学顕微鏡(高倍率での観察を目的とするレーザー顕微鏡や共焦点顕微鏡等のパターン観察装置も含む)や走査型電子顕微鏡(SEM:Scanning Electron Microscope)により画像を取得し、画像同士を目視で比較する方法で行っていた。
また別の方法としては、ホール又はドットのパターン画像から画像処理手法によって輪郭線を取得し、測定者がラフネスを測定することが可能なパターンの直線部分を指定して、指定部分の輪郭線のバラツキからエッジラフネスを算出していた(特許文献1参照)。
【特許文献1】特開2001−101414号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、前記のようなホール又はドットパターンのラフネス確認方法において、光学顕微鏡(高倍率での観察を目的とするレーザー顕微鏡や共焦点顕微鏡等のパターン観察装置も含む)や走査型電子顕微鏡による目視観察では、定性的な判断を行うだけで定量的な評価はできなかった。
また、画像処理方法によって輪郭線を取得し、測定者がラフネスを測定することができるパターンの直線部分を指定する方法では次の3つの問題がある。
【0009】
1つ目の問題は、ラフネスを測定する直線部分を指定する際にその位置が少しでも変わると、計測結果も変わってくる恐れがあるため、安定した計測を行うことが難しいことである。
2つ目の問題は、ホール又はドットパターンは直線部分とコーナー部分とから構成されるが、指定する範囲にコーナー部分がかかってしまうと、ラフネスの値は実際よりも大きな値となってしまうことである。直線部分とコーナー部分との切り分けは非常に難しく、直線部分だけを的確に指定するのは大変困難である。
3つ目の問題は、パターンの直線部分を指定する作業自体が煩雑である点である。計測するパターンが1つだけであれば問題ないが、通常は多くのパターンに対して計測を行う必要があるため、パターン毎に直線部分を指定する作業を行うと計測に多くの時間がかかってしまう。
このように、従来技術ではホール又はドットパターン形状のラフネスを正確かつ迅速に評価することは困難であった。
【0010】
本発明は、上記事情に鑑みてなされたものであり、その目的は、フォトマスク又はウェハのホール及びドットパターン形状のラフネスを計測する際に、測定者が計測する箇所を指定する必要がなく、迅速かつ高精度なラフネス計測が可能となるパターン形状計測装置及びパターン形状計測方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するためになされたもので、請求項1に記載の発明は、計測対象パターンを入力する計測対象パターン入力手段と、前記計測対象パターンの輪郭線を抽出する輪郭線抽出手段と、前記輪郭線の重心を算出する重心算出手段と、前記輪郭線と前記重心との距離を算出する第1の距離算出手段と、前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出手段と、前記第1の距離算出手段が算出した距離と前記第2の距離算出手段が算出した距離との差分を算出する差分算出手段と、前記差分からラフネス値を算出するラフネス値算出手段と、を有することを特徴とするパターン形状計測装置である。
【0012】
また、請求項2に記載の発明は、計測対象パターンを入力する計測対象パターン入力過程と、前記計測対象パターンの輪郭線を抽出する第1の輪郭線抽出過程と、前記輪郭線の重心を算出する重心算出過程と、前記輪郭線と前記重心との距離を算出する第1の距離算出過程と、前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出過程と、前記第1の距離算出過程で算出した距離と前記第2の距離算出過程で算出した距離との差分を算出する差分算出過程と、前記差分からラフネス値を算出するラフネス値算出過程と、を有することを特徴とするパターン形状計測方法である。
【0013】
また、請求項3に記載の発明は、前記第2の距離算出過程は、前記計測対象パターンの輪郭線の内部を塗り潰すことにより塗り潰しパターンを生成する塗り潰しパターン生成過程と、前記塗り潰しパターンに対して突起状の欠陥を除去するためのオープニング処理を行うオープニング処理過程と、前記塗り潰しパターンに対して欠け状の欠陥を除去するためのクロージング処理を行うクロージング処理過程と、前記オープニング処理及び前記クロージング処理を行った後の塗り潰しパターンから輪郭線を抽出する第2の輪郭線抽出過程と、前記第2の輪郭線抽出過程で抽出した輪郭線の重心を算出する第2の重心算出過程と、前記第2の輪郭線抽出過程で抽出した輪郭線と前記第2の重心算出過程で算出した重心との距離を算出する第3の距離算出過程と、を含むことを特徴とする請求項2に記載のパターン形状計測方法である。
【0014】
また、請求項4に記載の発明は、前記第2の距離算出過程は、エッジラフネスのないリファレンスパターンを入力するリファレンスパターン入力過程と、前記リファレンスパターン入力過程で入力したリファレンスパターンの輪郭線を抽出する第3の輪郭線抽出過程と、前記第3の輪郭線抽出過程で抽出した輪郭線の重心を算出する第3の重心算出過程と、前記第3の輪郭線抽出過程で抽出した輪郭線と前記第3の重心算出過程で算出した重心との距離を算出する第4の距離算出過程と、を含むことを特徴とする請求項2に記載のパターン形状計測方法である。
【0015】
また、請求項5に記載の発明は、前記リファレンスパターン入力過程で入力したリファレンスパターンの角に丸みを付ける丸み付加手段を更に有し、前記第3の輪郭線抽出過程は、前記丸み付加手段が角に丸みを付けたリファレンスパターンの輪郭線を抽出することを特徴とする請求項4に記載のパターン形状計測方法である。
【0016】
また、請求項6に記載の発明は、計測対象パターンを入力する計測対象パターン入力過程と、前記計測対象パターンの輪郭線を抽出する輪郭線抽出過程と、前記輪郭線の重心を算出する重心算出過程と、前記重心と前記輪郭線との距離を2のn(nは正の整数)乗個算出する距離算出過程と、前記距離算出過程で算出した2のn乗個の距離についてフーリエ変換を行うことにより距離を周波数に変換するフーリエ変換過程と、前記周波数分析過程での分析結果に基づいて高周波成分を抽出する高周波成分抽出過程と、前記高周波成分抽出過程で抽出した高周波成分について逆フーリエ変換を行うことにより周波数を距離に変換する逆フーリエ変換過程と、前記逆フーリエ変換過程で変換した距離からラフネス値を算出するラフネス値算出過程と、を有することを特徴とするパターン形状計測方法である。
【発明の効果】
【0017】
本発明では、計測対象パターンを入力し、計測対象パターンの輪郭線を抽出し、輪郭線の重心を算出し、輪郭線と重心との距離を算出し、リファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出し、それらの距離の差分を算出し、その差分からラフネス値を算出するようにした。
これにより、測定者が計測対象パターンの計測する箇所を指定しなくても、計測対象パターン入力手段に計測対象パターンを入力するだけで、計測対象パターンのラフネス値を数値として算出することができ、迅速かつ高精度なラフネス計測が可能となる
【発明を実施するための最良の形態】
【0018】
以下、図面を参照し、本発明の実施形態について説明する。
図1は、本発明の第1の実施形態によるパターン形状計測装置10aの構成の一例を示すブロック図である。このパターン形状計測装置10aは、計測対象パターン入力部11(計測対象パターン入力手段)、輪郭線抽出部12(輪郭線抽出手段)、重心算出部13(重心算出手段)、距離算出部14(第1の距離算出手段)、距離算出部15(第2の距離算出手段)、差分算出部16(差分算出手段)、ラフネス値算出部17(ラフネス値算出手段)、表示部18を有する。
【0019】
計測対象パターン入力部11は、ラフネスを計測する対象である計測対象パターンを取得し、その計測対象パターンを輪郭線抽出部12へ出力する。図2は、計測対象パターン入力部11が取得する計測対象パターンの一例を示す顕微鏡写真である。計測対象パターンとしては、走査型電子顕微鏡又は光学顕微鏡で観察することにより得られる256階調のビットマップ画像などが用いられる。
【0020】
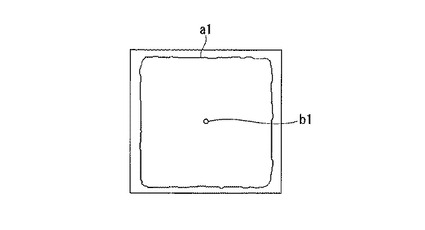
輪郭線抽出部12は、計測対象パターン入力部11から出力される計測対象パターンから、計測対象パターンの輪郭線を抽出し、その輪郭線を重心算出部13と距離算出部14とに出力する。輪郭線を抽出する方法としては、一般的な画像処理方法を用いることができる。なお、計測対象パターンが走査型電子顕微鏡から取得した画像などであって、ノイズや濃淡ムラなどの影響で一般的な画像処理方法で輪郭線の抽出が困難な場合には、特開2003−216959号公報に記載されている方法などを用いて、計測対象パターンの輪郭線を抽出することができる。図3は、輪郭線抽出部12が抽出する、計測対象パターンにおける輪郭線a1の一例を示す図である。
【0021】
重心算出部13は、輪郭線抽出部12から出力される輪郭線の情報に基づいて、その輪郭線の重心を算出し、その重心の情報を距離算出部14へ出力する。本実施形態では、輪郭線を構成する全点のX座標とY座標の平均値をそれぞれ求めることにより、重心の座標を算出している。図4は、重心算出部13が算出する、計測対象パターンにおける重心b1の一例を示す図である。
【0022】
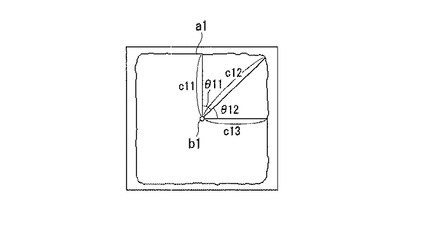
距離算出部14は、輪郭線抽出部12から出力される輪郭線の情報と、重心算出部13から出力される重心の情報とに基づいて、重心距離情報を算出する。ここで、重心距離情報とは、計測対象パターンの輪郭と、その輪郭の重心との距離を放射状に測定したものである。このとき、隣り合う放射線のなす角度は常に一定とする。例えば、この角度を3度とすると計測対象パターン一周分で、360度/3度=120個の重心距離情報が生成される。図5は、距離算出部14が算出する、計測対象パターンにおける重心距離c11、c12、c13、・・・の一例を示す図である。図5では、隣り合う放射線のなす角度θ11、θ12、・・・が、45度である場合を示している。
【0023】
距離算出部15は、計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心とに基づいて、リファレンスパターンにおける重心距離情報を算出し、その重心距離情報を差分算出部16へ出力する。リファレンスパターンにおける重心距離情報を算出する方法としては、後述する図10や図14などの方法を使用することができる。
図6は、距離算出部15が算出する、リファレンスパターンにおける輪郭線a2、重心b2、重心距離c21、c22、・・・の一例を示す図である。図6では、隣り合う放射線のなす角度θ21、θ22、・・・が、45度である場合を示している。
【0024】
差分算出部16は、距離算出部14から出力される計測対象パターンにおける重心距離情報と、距離算出部15から出力されるリファレンスパターンにおける重心距離情報との差分を算出し、その差分の情報をラフネス値算出部17へ出力する。
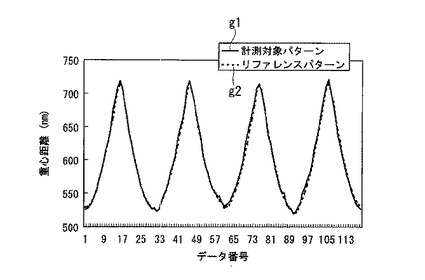
図7は、差分算出部16が、距離算出部14から取得する計測対象パターンにおける重心距離(図7の実線の曲線g1)と、距離算出部15から取得するリファレンスパターンにおける重心距離(図7の点線の曲線g2)とを示すグラフである。図7において、横軸はデータ番号を示しており、縦軸は重心距離(単位:nm)を示している。
ここでは、図5において、θ11、θ12、・・・を3度に設定することにより、計測対象パターンの重心b1から120本の放射線を等間隔に設定し、それぞれの放射線に1から120までのデータ番号を付している。
図7に示すように、計測対象パターンにおける重心距離g1と、リファレンスパターンにおける重心距離g2とを比較すると、全体的にはほとんど同じであるが、計測対象パターンがラフネス成分を多く含んでいるため、所々に違いがある。
【0025】
差分算出部16は、図7において、各データ番号における曲線g1と曲線g2との重心距離の差分を求めることにより、図8に示すような差分情報を算出する。図8において、横軸はデータ番号を示しており、縦軸は差分(単位:nm)を示している。
ここでは、図6において、θ21、θ22、・・・を3度に設定することにより、計測対象パターンの重心b2から120本の放射線を等間隔に設定し、それぞれの放射線に1から120までのデータ番号を付している。
【0026】
ラフネス値算出部17は、差分算出部16から出力される差分の情報に基づいて、ラフネス値を算出し、そのラフネス値を表示部18へ出力する。図8のグラフにおける差分情報のバラツキがパターンのラフネスを示しており、差分情報について標準偏差の3σを計算することによりラフネス値を算出することができる。図8のグラフに基づいてラフネス値を算出したところ、13nmという結果が得られた。
表示部18は、LCD(Liquid Crystal Display)などの表示機器であり、ラフネス値算出部17から出力されるラフネス値を表示機器の画面上に表示する。
【0027】
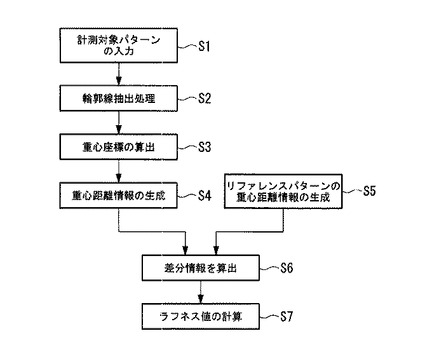
図9は、本発明の第1の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。始めに、パターン形状計測装置10aの使用者は、ラフネスを測定する対象である計測対象パターンを入力する(ステップS1)。これにより、計測対象パターン入力部11は、計測対象パターン(図2参照)を取得する。
輪郭線抽出部12は、ステップS1で取得した計測対象パターンから輪郭線(図3参照)を抽出する(ステップS2)。
重心算出部13は、ステップS2で抽出した輪郭線の重心(図4参照)を算出する(ステップS3)。
距離算出部14は、ステップS2で抽出した輪郭線と、ステップS3で算出した重心とに基づいて、計測対象パターンにおける重心距離(図5参照)を算出する(ステップS4)。
【0028】
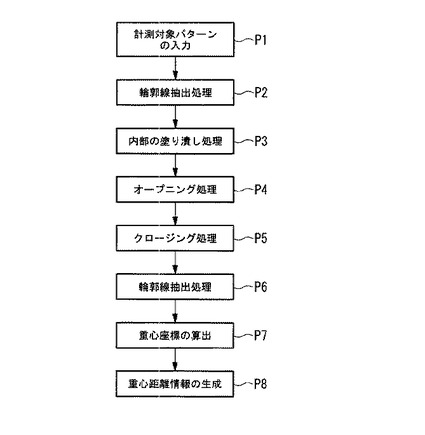
一方、距離算出部15は、リファレンスパターンにおける重心距離(図6参照)を算出する(ステップS5)。図10は、図9のステップS5における距離算出部15の処理の一例を示すフローチャートである。この図10のフローチャートは、画像処理を利用して、計測対象パターンからリファレンスパターンを生成する方法を示している。
始めに、パターン形状計測装置10aの使用者は、ラフネスを測定する対象であるリファレンスパターンを入力する(ステップP1)。これにより、距離算出部15は、計測対象パターンを取得する。ここでは、リファレンスパターンとして、図9のステップS1における計測対象パターンを入力している。
【0029】
そして、ステップP1で取得した計測対象パターンから輪郭線を抽出する(ステップP2)。このステップP2の処理は、図9のステップS2の処理と同じである。ここでは、ステップP2の処理により、図3と同じ輪郭線が得られる。
そして、ステップP2で抽出した輪郭線の内部を塗り潰す(ステップP3)。これにより、図11に示すような塗り潰しパターンd1が生成される。
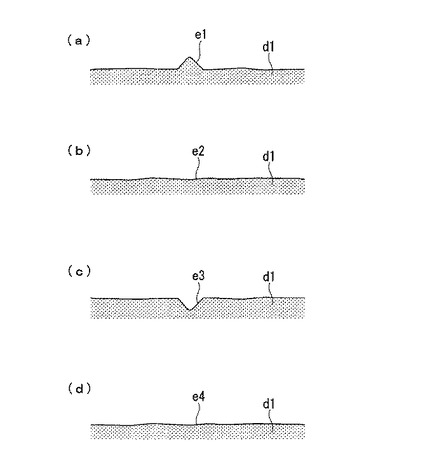
そして、図12(a)に示すように、塗り潰しパターンd1の凸状の輪郭(突起状の欠陥)e1を除去するためのオープニング処理を行う(ステップP4)。このオープニング処理としては、一般的に用いられている画像処理が使用される。これにより、塗り潰しパターンの凸状の輪郭e1(図12(a))は、直線状の輪郭e2(図12(b))に修正される。
【0030】
また、図12(c)に示すように、塗り潰しパターンd1の凹状の輪郭(欠け状の欠陥)e3を除去するためのクロージング処理を行う(ステップP5)。このクロージング処理としては、一般的に用いられている画像処理が使用される。これにより、塗り潰しパターンの凹状の輪郭e3(図12(c))は、直線状の輪郭e4(図12(d))に修正される。塗り潰しパターンに対して、ステップP4のオープニング処理と、ステップP5のクロージング処理を行うことにより、図11の塗り潰しパターンd1は、図13(a)に示すような塗り潰しパターンd2に修正される。塗り潰しパターンd2は、塗り潰しパターンd1に比べて、塗り潰しパターンの輪郭部分の凹凸が少なく、より直線状の輪郭になっている。
なお、オープニング処理及びクロージング処理は2値画像の膨張・収縮処理の組み合わせによって実現され、膨張・収縮処理の繰り返し数により除去できる凹凸の大きさが変化する。本実施形態では、計測したいラフネスの凹凸がなくなるようにオープニング処理及びクロージング処理の回数を設定している。
【0031】
図10に戻り、ステップP5の処理後、オープニング処理及びクロージング処理を行なった塗り潰しパターンd2から、輪郭線a3(図13(b)参照)を抽出する(ステップP6)。このステップP6の処理は、図9のステップS2の処理と同じである。
そして、ステップP6で抽出した輪郭線に基づいて、その輪郭線の重心座標を算出する(ステップP7)。このステップP7の処理は、図9のステップS3の処理と同じである。次に、ステップP7で算出した重心座標に基づいて、重心距離情報を生成する(ステップP8)。このステップP8の処理は、図9のステップS4の処理と同じである。
【0032】
図9に戻り、差分算出部16は、ステップS4で生成した計測対象パターンにおける差分距離情報と、図10のステップP8で生成したリファレンスパターンにおける差分距離情報との差分の情報を算出する(ステップS6)。
そして、ラフネス値算出部17は、ステップS6で算出した差分の情報に基づいて、ラフネス値を算出する(ステップS7)。
【0033】
上述した本発明の第1の実施形態によれば、フォトマスクやウェハのホール又はドットパターンのエッジラフネスの計測において、パターン形状計測装置10aの使用者は、計測範囲を指定することなく計測対象パターンを計測対象パターン入力部11に入力するだけでエッジのラフネス値を算出することが可能となる。これにより、ホール又はドットパターンの迅速かつ高精度で安定したラフネス値の定量化が可能となる。
【0034】
なお、上述した本発明の第1の実施形態では、図9のステップS5において、図10の処理を行う場合について説明したが、これに限定されるものではない。例えば、以下に示す方法を使用することもできる。
【0035】
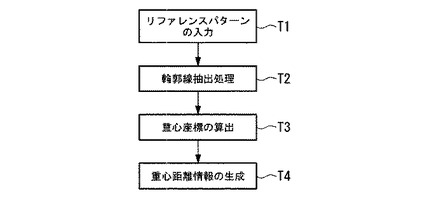
図14は、図9のステップS5における距離算出部15の処理の他の一例を示すフローチャートである。この図14のフローチャートは、ラフネスのないパターンを比較用のリファレンスパターンとして使用する場合を示している。
始めに、パターン形状計測装置10aの使用者は、計測対象パターンと比較するためのラフネスのないリファレンスパターンを入力する(ステップT1)。これにより、計測対象パターン入力部11は、リファレンスパターンを取得する。
そして、ステップT1で取得したリファレンスパターンの輪郭線を抽出する(ステップT2)。このステップT2の処理は、図9のステップS2の処理と同じである。次に、ステップT2で抽出した輪郭線に基づいて、重心座標を算出する(ステップT3)。このステップT3の処理は、図9のステップS3の処理と同じである。
そして、ステップT2で抽出した輪郭線と、ステップT3で算出した重心座標とに基づいて、重心距離情報を算出する(ステップT4)。このステップT4の処理は、図9のステップS4の処理と同じである。
【0036】
なお、図14のステップT1の処理において、リファレンスパターンとして、測定対象パターンの設計パターンを用いてもよい。ホール又はドットの設計パターンは通常、角が90度の矩形であるがフォトマスク又はウェハ上の実パターンは角が丸くなっているため、設計パターンの角に丸みをつけたものをリファレンスパターンとしてステップT1で入力する。
設計パターンの角の丸みは、CAD(Computer Aided Design)ソフトを用いて付加する。ホール又はドットパターンは、大きさや縦横比によってその角の丸み具合が異なるため、エッジラフネスを計測するパターンの角を予め計測して丸み具合を確認する。パターンの角は単純な円の弧に近い形状の場合もあれば、楕円の弧の形状になっている場合もある。CADソフトを用いて設計パターンの角に丸みを付加する際には、この角の丸み具合の情報を利用する。例えば、パターンの角が円弧に近い場合は、コーナーの半径の情報を入力し、パターンの角が楕円の弧に近い場合は、コーナーの縦・横の長さを入力することで、実際のパターンと同様な角の丸みを持つ設計パターンを生成する。
【0037】
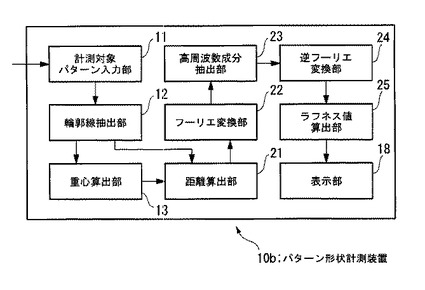
次に、本発明の第2の実施形態によるパターン形状計測装置10bについて説明する。第2の実施形態は、比較用のリファレンスパターンを使わずに、信号処理手法によりラフネス値を算出する。
図15は、本発明の第2の実施形態によるパターン形状計測装置10bの構成の一例を示すブロック図である。このパターン形状計測装置10bは、計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、距離算出部21、フーリエ変換部22、高周波数成分抽出部23、逆フーリエ変換部24、ラフネス値算出部25、表示部15を有する。
計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、表示部15については、本発明の第1の実施形態によるパターン形状計測装置10a(図1)と同じであるので、それらの説明を省略する。
【0038】
距離算出部21は、輪郭線抽出部12から出力される輪郭線の情報と、重心算出部13から出力される重心の情報とに基づいて、2のn(nは正の整数)乗個の重心距離情報を算出する。ここで、重心距離データを2のn乗個とするのは、フーリエ変換の計算を行い易くするためである。例えば、隣り合う放射線のなす角度を2度として、計測対象パターン一周分で360度/2度=180個の重心距離情報を生成し、それに152度(約1/2.4周分)/2度=76個のデータを追加して256個とする。
【0039】
フーリエ変換部22は、距離算出部22から出力される重心距離についてフーリエ変換を行うことにより距離を周波数に変換し、その情報を高周波数成分抽出部23へ出力する。
高周波数成分抽出部23は、フーリエ変換部22から出力される周波数の情報から、高周波数成分を抽出し、逆フーリエ変換部24へ出力する。
逆フーリエ変換部24は、高周波数成分抽出部23から出力される周波数の情報について逆フーリエ変換を行うことにより周波数を距離に変換し、その情報をラフネス値算出部25へ出力する。
ラフネス値算出部25は、逆フーリエ変換部24から出力される距離の情報に基づいて、ラフネス値を算出し、そのラフネス値を表示部18へ出力する。ラフネス値は、逆フーリエ変換部24から出力される距離の情報について標準偏差の3σを計算することにより算出することができる。
【0040】
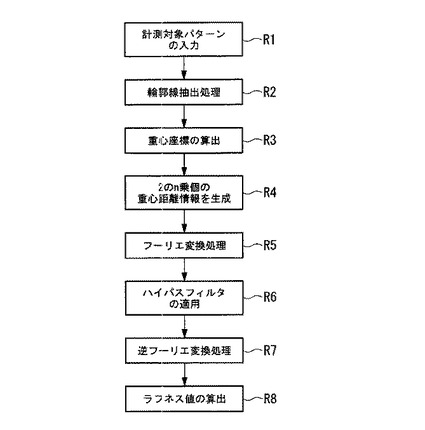
図16は、本発明の第2の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。ステップR1〜R3の処理は、第1の実施形態によるステップS1〜S3の処理と同じであるので、それらの説明を省略する。
ステップR3の後、距離算出部21は、ステップR2で抽出した輪郭線と、ステップR3で算出した重心とに基づいて、計測対象パターンにおける2のn乗個の重心距離を算出する(ステップR4)。
そして、フーリエ変換部22は、ステップR4で算出した2のn乗個の重心距離について、フーリエ変換を行うことにより、距離を周波数に変換する(ステップR5)。次に、高周波数成分抽出部23は、ステップR5で変換した周波数から、高周波成分のみを抽出する(ステップS6)。これにより、周波数が高い計測対象パターンについてラフネス値を算出することができる。
そして、逆フーリエ変換部24は、ステップR5で抽出した高周波成分の周波数について、逆フーリエ変換を行うことにより、周波数を距離に変換する(ステップR7)。これにより、計測対象パターンの全体的な形状を表す情報を除いたラフネス部分だけの情報を取得することができる。次に、ラフネス値算出部25は、ステップR7で変換した距離に基づいて、ラフネス値を算出する(ステップR8)。
【0041】
上述した本発明の第2の実施形態によれば、フォトマスクやウェハのホール又はドットパターンのエッジラフネスの計測において、パターン形状計測装置10bの使用者は、計測範囲を指定することなく計測対象パターンを計測対象パターン入力部11に入力するだけでエッジのラフネス値を算出することが可能となる。これにより、ホール又はドットパターンの迅速かつ高精度で安定したラフネス値の定量化が可能となる。
また、第1の実施形態では、計測対象パターン入力部11から計測対象パターンを入力し、距離算出部15にリファレンスパターンを入力する必要があったが、第2の実施形態では、計測対象パターン入力部11に計測対象パターンだけを入力すればよく、リファレンスパターンを入力する必要がないため、パターン形状計測装置10bの使用者の負担をより軽減することができる。
【0042】
なお、以上説明した実施形態において、図1又は図15の計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、距離算出部14、距離算出部15、差分算出部16、ラフネス値算出部17、表示部18、距離算出部21、フーリエ変換部22、高周波数成分抽出部23、逆フーリエ変換部24、ラフネス値算出部25の機能又はこれらの機能の一部を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによりパターン形状計測装置10a又はパターン形状計測装置10bの制御を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0043】
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時刻の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時刻プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【図面の簡単な説明】
【0045】
【図1】本発明の第1の実施形態によるパターン形状計測装置10aの構成の一例を示すブロック図である。
【図2】計測対象パターン入力部11が取得する計測対象パターンの一例を示す顕微鏡写真である。
【図3】輪郭線抽出部12が抽出する、計測対象パターンにおける輪郭線a1の一例を示す図である。
【図4】重心算出部13が算出する、計測対象パターンにおける重心b1の一例を示す図である。
【図5】距離算出部14が算出する、計測対象パターンにおける重心距離c11、c12、c13、・・・の一例を示す図である。
【図6】距離算出部15が算出する、リファレンスパターンにおける輪郭線a2、重心b2、重心距離c21、c22、c23、・・・の一例を示す図である。
【図7】差分算出部16が、距離算出部14から取得する計測対象パターンにおける重心距離情報と、距離算出部15から取得するリファレンスパターンにおける重心距離情報とを示すグラフである。
【図8】差分算出部16が算出する差分情報の一例を示すグラフである。
【図9】本発明の第1の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。
【図10】図9のステップS5における距離算出部15の処理の一例を示すフローチャートである。
【図11】図10のステップP3で生成される塗り潰しパターンの一例を示す図である。
【図12】図10のステップP4及びP5のオープニング処理及びクロージング処理について説明するための図である。
【図13】図10のステップP4〜P6の処理について説明するための図である。
【図14】図9のステップS5における距離算出部15の処理の他の一例を示すフローチャートである。
【図15】本発明の第2の実施形態によるパターン形状計測装置10bの構成の一例を示すブロック図である。
【図16】本発明の第2の実施形態によるパターン形状計測装置10bの処理の一例を示すフローチャートである。
【符号の説明】
【0046】
10a、10b・・・パターン形状計測装置、11・・・計測対象パターン入力部、12・・・輪郭線抽出部、13・・・重心算出部、14・・・距離算出部、15・・・距離算出部、16・・・差分算出部、17・・・ラフネス値算出部、18・・・表示部、21・・・距離算出部、22・・・フーリエ変換部、23・・・高周波数成分抽出部、24・・・逆フーリエ変換部、25・・・ラフネス値算出部
【技術分野】
【0001】
本発明は、半導体製造のリソグラフィ工程に用いられるフォトマスクのマスクパターン及び、フォトマスクを露光転写しウェハ上に形成されるウェハパターンのパターン画像からその形状の特徴を定量的に計測するためのパターン形状計測装置及びパターン形状計測方法に関する。
【背景技術】
【0002】
近年の半導体LSI(Large Scale Integration)パターンの微細化に伴い、パターン原版としてのフォトマスクも同様に微細化への対応を迫られており、同時に高精度化への要求は非常に厳しい。
従来、フォトマスク品質における重要項目として、欠陥・寸法精度・アライメントの3項目が特に重視されており、半導体の微細化が進む現在ではそれぞれの項目を計測するための高精度なフォトマスク専用検査装置が開発され使用されている。
しかし、フォトマスクパターンの微細化による高精度化への要求は、前記3項目以外のあらゆる品質項目(パターン形状、パターンデータ保証、耐久性、クリーン度等)においても同様になりつつあり、特にパターン形状の精度については直接LSI回路の精度および性能に関わることから、かなり重視されるようになってきた。
【0003】
フォトマスクのパターン形状は、半導体回路のマスクレイアウト設計において設計図面通りのパターンが精度良くマスク上に再現されていることが望ましい。しかし、実際にはリソグラフィ技術を用いてガラス上の金属薄膜に微細なパターンを加工しているため、マスクパターンと設計パターンとは完全に同一形状ではなく、寸法差やコーナー部分の丸みなど、微小な違いが存在する。
この違いはマスク上で数十〜数百ナノメートル程度の大きさであることがほとんどであるが、近年の超LSIの微細化の進展によって、これが半導体回路の特性に影響を与えることが懸念され始めている。すなわち、微細なパターンであるほど、パターン自体に対して前記のパターン形状の違いが相対的に大きくなり、特性値に影響するようになっている。
【0004】
マスク品質上の点検項目としてパターン形状を表す場合、様々な項目がある。例えば、パターンコーナー部分の丸み(=コーナーラウンド)、直線パターンエッジ部分のギザツキ(=エッジラフネス)、描画時のパターンズレ(=バッティングエラー)、形状歪み、テーパー形状など、パターンのそれぞれの部分ごとにチェックすべき項目がある。なお、コーナーラウンド、エッジラフネス、バッティングエラーは、それぞれフォトマスク検査工程で通常使われている用語である。
【0005】
一方、リソグラフィ工程によりウェハ上に露光転写されたパターンにおいてもパターン形状の精度が非常に重要になってきている。特に、ArFリソグラフィにおいてはパターンエッジラフネスが電気特性に影響を与えるため、それを定量的に計測する手法が検討されている。
【0006】
通常、フォトマスク及びウェハのパターンにおいてエッジラフネスとは、本来直線パターンでのエッジのギザツキのことを示している。しかしながら、近年の微細化によりホールパターンやドットパターンのように四角の閉図形においても、パターンの歪みやギザツキが目立つようになってきており、最終的な電気特性に影響を与える懸念があるため、その定量化が望まれている。
これまで、エッジラフネスといえば直線パターンに適用する概念だと考えられていたが、ホールパターンやドットパターンのような閉図形に対しても定量的に評価する必要性が高まってきている。
【0007】
従来、フォトマスクやウェハのホール又はドットパターンのラフネス評価は、光学顕微鏡(高倍率での観察を目的とするレーザー顕微鏡や共焦点顕微鏡等のパターン観察装置も含む)や走査型電子顕微鏡(SEM:Scanning Electron Microscope)により画像を取得し、画像同士を目視で比較する方法で行っていた。
また別の方法としては、ホール又はドットのパターン画像から画像処理手法によって輪郭線を取得し、測定者がラフネスを測定することが可能なパターンの直線部分を指定して、指定部分の輪郭線のバラツキからエッジラフネスを算出していた(特許文献1参照)。
【特許文献1】特開2001−101414号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、前記のようなホール又はドットパターンのラフネス確認方法において、光学顕微鏡(高倍率での観察を目的とするレーザー顕微鏡や共焦点顕微鏡等のパターン観察装置も含む)や走査型電子顕微鏡による目視観察では、定性的な判断を行うだけで定量的な評価はできなかった。
また、画像処理方法によって輪郭線を取得し、測定者がラフネスを測定することができるパターンの直線部分を指定する方法では次の3つの問題がある。
【0009】
1つ目の問題は、ラフネスを測定する直線部分を指定する際にその位置が少しでも変わると、計測結果も変わってくる恐れがあるため、安定した計測を行うことが難しいことである。
2つ目の問題は、ホール又はドットパターンは直線部分とコーナー部分とから構成されるが、指定する範囲にコーナー部分がかかってしまうと、ラフネスの値は実際よりも大きな値となってしまうことである。直線部分とコーナー部分との切り分けは非常に難しく、直線部分だけを的確に指定するのは大変困難である。
3つ目の問題は、パターンの直線部分を指定する作業自体が煩雑である点である。計測するパターンが1つだけであれば問題ないが、通常は多くのパターンに対して計測を行う必要があるため、パターン毎に直線部分を指定する作業を行うと計測に多くの時間がかかってしまう。
このように、従来技術ではホール又はドットパターン形状のラフネスを正確かつ迅速に評価することは困難であった。
【0010】
本発明は、上記事情に鑑みてなされたものであり、その目的は、フォトマスク又はウェハのホール及びドットパターン形状のラフネスを計測する際に、測定者が計測する箇所を指定する必要がなく、迅速かつ高精度なラフネス計測が可能となるパターン形状計測装置及びパターン形状計測方法を提供することにある。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するためになされたもので、請求項1に記載の発明は、計測対象パターンを入力する計測対象パターン入力手段と、前記計測対象パターンの輪郭線を抽出する輪郭線抽出手段と、前記輪郭線の重心を算出する重心算出手段と、前記輪郭線と前記重心との距離を算出する第1の距離算出手段と、前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出手段と、前記第1の距離算出手段が算出した距離と前記第2の距離算出手段が算出した距離との差分を算出する差分算出手段と、前記差分からラフネス値を算出するラフネス値算出手段と、を有することを特徴とするパターン形状計測装置である。
【0012】
また、請求項2に記載の発明は、計測対象パターンを入力する計測対象パターン入力過程と、前記計測対象パターンの輪郭線を抽出する第1の輪郭線抽出過程と、前記輪郭線の重心を算出する重心算出過程と、前記輪郭線と前記重心との距離を算出する第1の距離算出過程と、前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出過程と、前記第1の距離算出過程で算出した距離と前記第2の距離算出過程で算出した距離との差分を算出する差分算出過程と、前記差分からラフネス値を算出するラフネス値算出過程と、を有することを特徴とするパターン形状計測方法である。
【0013】
また、請求項3に記載の発明は、前記第2の距離算出過程は、前記計測対象パターンの輪郭線の内部を塗り潰すことにより塗り潰しパターンを生成する塗り潰しパターン生成過程と、前記塗り潰しパターンに対して突起状の欠陥を除去するためのオープニング処理を行うオープニング処理過程と、前記塗り潰しパターンに対して欠け状の欠陥を除去するためのクロージング処理を行うクロージング処理過程と、前記オープニング処理及び前記クロージング処理を行った後の塗り潰しパターンから輪郭線を抽出する第2の輪郭線抽出過程と、前記第2の輪郭線抽出過程で抽出した輪郭線の重心を算出する第2の重心算出過程と、前記第2の輪郭線抽出過程で抽出した輪郭線と前記第2の重心算出過程で算出した重心との距離を算出する第3の距離算出過程と、を含むことを特徴とする請求項2に記載のパターン形状計測方法である。
【0014】
また、請求項4に記載の発明は、前記第2の距離算出過程は、エッジラフネスのないリファレンスパターンを入力するリファレンスパターン入力過程と、前記リファレンスパターン入力過程で入力したリファレンスパターンの輪郭線を抽出する第3の輪郭線抽出過程と、前記第3の輪郭線抽出過程で抽出した輪郭線の重心を算出する第3の重心算出過程と、前記第3の輪郭線抽出過程で抽出した輪郭線と前記第3の重心算出過程で算出した重心との距離を算出する第4の距離算出過程と、を含むことを特徴とする請求項2に記載のパターン形状計測方法である。
【0015】
また、請求項5に記載の発明は、前記リファレンスパターン入力過程で入力したリファレンスパターンの角に丸みを付ける丸み付加手段を更に有し、前記第3の輪郭線抽出過程は、前記丸み付加手段が角に丸みを付けたリファレンスパターンの輪郭線を抽出することを特徴とする請求項4に記載のパターン形状計測方法である。
【0016】
また、請求項6に記載の発明は、計測対象パターンを入力する計測対象パターン入力過程と、前記計測対象パターンの輪郭線を抽出する輪郭線抽出過程と、前記輪郭線の重心を算出する重心算出過程と、前記重心と前記輪郭線との距離を2のn(nは正の整数)乗個算出する距離算出過程と、前記距離算出過程で算出した2のn乗個の距離についてフーリエ変換を行うことにより距離を周波数に変換するフーリエ変換過程と、前記周波数分析過程での分析結果に基づいて高周波成分を抽出する高周波成分抽出過程と、前記高周波成分抽出過程で抽出した高周波成分について逆フーリエ変換を行うことにより周波数を距離に変換する逆フーリエ変換過程と、前記逆フーリエ変換過程で変換した距離からラフネス値を算出するラフネス値算出過程と、を有することを特徴とするパターン形状計測方法である。
【発明の効果】
【0017】
本発明では、計測対象パターンを入力し、計測対象パターンの輪郭線を抽出し、輪郭線の重心を算出し、輪郭線と重心との距離を算出し、リファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出し、それらの距離の差分を算出し、その差分からラフネス値を算出するようにした。
これにより、測定者が計測対象パターンの計測する箇所を指定しなくても、計測対象パターン入力手段に計測対象パターンを入力するだけで、計測対象パターンのラフネス値を数値として算出することができ、迅速かつ高精度なラフネス計測が可能となる
【発明を実施するための最良の形態】
【0018】
以下、図面を参照し、本発明の実施形態について説明する。
図1は、本発明の第1の実施形態によるパターン形状計測装置10aの構成の一例を示すブロック図である。このパターン形状計測装置10aは、計測対象パターン入力部11(計測対象パターン入力手段)、輪郭線抽出部12(輪郭線抽出手段)、重心算出部13(重心算出手段)、距離算出部14(第1の距離算出手段)、距離算出部15(第2の距離算出手段)、差分算出部16(差分算出手段)、ラフネス値算出部17(ラフネス値算出手段)、表示部18を有する。
【0019】
計測対象パターン入力部11は、ラフネスを計測する対象である計測対象パターンを取得し、その計測対象パターンを輪郭線抽出部12へ出力する。図2は、計測対象パターン入力部11が取得する計測対象パターンの一例を示す顕微鏡写真である。計測対象パターンとしては、走査型電子顕微鏡又は光学顕微鏡で観察することにより得られる256階調のビットマップ画像などが用いられる。
【0020】
輪郭線抽出部12は、計測対象パターン入力部11から出力される計測対象パターンから、計測対象パターンの輪郭線を抽出し、その輪郭線を重心算出部13と距離算出部14とに出力する。輪郭線を抽出する方法としては、一般的な画像処理方法を用いることができる。なお、計測対象パターンが走査型電子顕微鏡から取得した画像などであって、ノイズや濃淡ムラなどの影響で一般的な画像処理方法で輪郭線の抽出が困難な場合には、特開2003−216959号公報に記載されている方法などを用いて、計測対象パターンの輪郭線を抽出することができる。図3は、輪郭線抽出部12が抽出する、計測対象パターンにおける輪郭線a1の一例を示す図である。
【0021】
重心算出部13は、輪郭線抽出部12から出力される輪郭線の情報に基づいて、その輪郭線の重心を算出し、その重心の情報を距離算出部14へ出力する。本実施形態では、輪郭線を構成する全点のX座標とY座標の平均値をそれぞれ求めることにより、重心の座標を算出している。図4は、重心算出部13が算出する、計測対象パターンにおける重心b1の一例を示す図である。
【0022】
距離算出部14は、輪郭線抽出部12から出力される輪郭線の情報と、重心算出部13から出力される重心の情報とに基づいて、重心距離情報を算出する。ここで、重心距離情報とは、計測対象パターンの輪郭と、その輪郭の重心との距離を放射状に測定したものである。このとき、隣り合う放射線のなす角度は常に一定とする。例えば、この角度を3度とすると計測対象パターン一周分で、360度/3度=120個の重心距離情報が生成される。図5は、距離算出部14が算出する、計測対象パターンにおける重心距離c11、c12、c13、・・・の一例を示す図である。図5では、隣り合う放射線のなす角度θ11、θ12、・・・が、45度である場合を示している。
【0023】
距離算出部15は、計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心とに基づいて、リファレンスパターンにおける重心距離情報を算出し、その重心距離情報を差分算出部16へ出力する。リファレンスパターンにおける重心距離情報を算出する方法としては、後述する図10や図14などの方法を使用することができる。
図6は、距離算出部15が算出する、リファレンスパターンにおける輪郭線a2、重心b2、重心距離c21、c22、・・・の一例を示す図である。図6では、隣り合う放射線のなす角度θ21、θ22、・・・が、45度である場合を示している。
【0024】
差分算出部16は、距離算出部14から出力される計測対象パターンにおける重心距離情報と、距離算出部15から出力されるリファレンスパターンにおける重心距離情報との差分を算出し、その差分の情報をラフネス値算出部17へ出力する。
図7は、差分算出部16が、距離算出部14から取得する計測対象パターンにおける重心距離(図7の実線の曲線g1)と、距離算出部15から取得するリファレンスパターンにおける重心距離(図7の点線の曲線g2)とを示すグラフである。図7において、横軸はデータ番号を示しており、縦軸は重心距離(単位:nm)を示している。
ここでは、図5において、θ11、θ12、・・・を3度に設定することにより、計測対象パターンの重心b1から120本の放射線を等間隔に設定し、それぞれの放射線に1から120までのデータ番号を付している。
図7に示すように、計測対象パターンにおける重心距離g1と、リファレンスパターンにおける重心距離g2とを比較すると、全体的にはほとんど同じであるが、計測対象パターンがラフネス成分を多く含んでいるため、所々に違いがある。
【0025】
差分算出部16は、図7において、各データ番号における曲線g1と曲線g2との重心距離の差分を求めることにより、図8に示すような差分情報を算出する。図8において、横軸はデータ番号を示しており、縦軸は差分(単位:nm)を示している。
ここでは、図6において、θ21、θ22、・・・を3度に設定することにより、計測対象パターンの重心b2から120本の放射線を等間隔に設定し、それぞれの放射線に1から120までのデータ番号を付している。
【0026】
ラフネス値算出部17は、差分算出部16から出力される差分の情報に基づいて、ラフネス値を算出し、そのラフネス値を表示部18へ出力する。図8のグラフにおける差分情報のバラツキがパターンのラフネスを示しており、差分情報について標準偏差の3σを計算することによりラフネス値を算出することができる。図8のグラフに基づいてラフネス値を算出したところ、13nmという結果が得られた。
表示部18は、LCD(Liquid Crystal Display)などの表示機器であり、ラフネス値算出部17から出力されるラフネス値を表示機器の画面上に表示する。
【0027】
図9は、本発明の第1の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。始めに、パターン形状計測装置10aの使用者は、ラフネスを測定する対象である計測対象パターンを入力する(ステップS1)。これにより、計測対象パターン入力部11は、計測対象パターン(図2参照)を取得する。
輪郭線抽出部12は、ステップS1で取得した計測対象パターンから輪郭線(図3参照)を抽出する(ステップS2)。
重心算出部13は、ステップS2で抽出した輪郭線の重心(図4参照)を算出する(ステップS3)。
距離算出部14は、ステップS2で抽出した輪郭線と、ステップS3で算出した重心とに基づいて、計測対象パターンにおける重心距離(図5参照)を算出する(ステップS4)。
【0028】
一方、距離算出部15は、リファレンスパターンにおける重心距離(図6参照)を算出する(ステップS5)。図10は、図9のステップS5における距離算出部15の処理の一例を示すフローチャートである。この図10のフローチャートは、画像処理を利用して、計測対象パターンからリファレンスパターンを生成する方法を示している。
始めに、パターン形状計測装置10aの使用者は、ラフネスを測定する対象であるリファレンスパターンを入力する(ステップP1)。これにより、距離算出部15は、計測対象パターンを取得する。ここでは、リファレンスパターンとして、図9のステップS1における計測対象パターンを入力している。
【0029】
そして、ステップP1で取得した計測対象パターンから輪郭線を抽出する(ステップP2)。このステップP2の処理は、図9のステップS2の処理と同じである。ここでは、ステップP2の処理により、図3と同じ輪郭線が得られる。
そして、ステップP2で抽出した輪郭線の内部を塗り潰す(ステップP3)。これにより、図11に示すような塗り潰しパターンd1が生成される。
そして、図12(a)に示すように、塗り潰しパターンd1の凸状の輪郭(突起状の欠陥)e1を除去するためのオープニング処理を行う(ステップP4)。このオープニング処理としては、一般的に用いられている画像処理が使用される。これにより、塗り潰しパターンの凸状の輪郭e1(図12(a))は、直線状の輪郭e2(図12(b))に修正される。
【0030】
また、図12(c)に示すように、塗り潰しパターンd1の凹状の輪郭(欠け状の欠陥)e3を除去するためのクロージング処理を行う(ステップP5)。このクロージング処理としては、一般的に用いられている画像処理が使用される。これにより、塗り潰しパターンの凹状の輪郭e3(図12(c))は、直線状の輪郭e4(図12(d))に修正される。塗り潰しパターンに対して、ステップP4のオープニング処理と、ステップP5のクロージング処理を行うことにより、図11の塗り潰しパターンd1は、図13(a)に示すような塗り潰しパターンd2に修正される。塗り潰しパターンd2は、塗り潰しパターンd1に比べて、塗り潰しパターンの輪郭部分の凹凸が少なく、より直線状の輪郭になっている。
なお、オープニング処理及びクロージング処理は2値画像の膨張・収縮処理の組み合わせによって実現され、膨張・収縮処理の繰り返し数により除去できる凹凸の大きさが変化する。本実施形態では、計測したいラフネスの凹凸がなくなるようにオープニング処理及びクロージング処理の回数を設定している。
【0031】
図10に戻り、ステップP5の処理後、オープニング処理及びクロージング処理を行なった塗り潰しパターンd2から、輪郭線a3(図13(b)参照)を抽出する(ステップP6)。このステップP6の処理は、図9のステップS2の処理と同じである。
そして、ステップP6で抽出した輪郭線に基づいて、その輪郭線の重心座標を算出する(ステップP7)。このステップP7の処理は、図9のステップS3の処理と同じである。次に、ステップP7で算出した重心座標に基づいて、重心距離情報を生成する(ステップP8)。このステップP8の処理は、図9のステップS4の処理と同じである。
【0032】
図9に戻り、差分算出部16は、ステップS4で生成した計測対象パターンにおける差分距離情報と、図10のステップP8で生成したリファレンスパターンにおける差分距離情報との差分の情報を算出する(ステップS6)。
そして、ラフネス値算出部17は、ステップS6で算出した差分の情報に基づいて、ラフネス値を算出する(ステップS7)。
【0033】
上述した本発明の第1の実施形態によれば、フォトマスクやウェハのホール又はドットパターンのエッジラフネスの計測において、パターン形状計測装置10aの使用者は、計測範囲を指定することなく計測対象パターンを計測対象パターン入力部11に入力するだけでエッジのラフネス値を算出することが可能となる。これにより、ホール又はドットパターンの迅速かつ高精度で安定したラフネス値の定量化が可能となる。
【0034】
なお、上述した本発明の第1の実施形態では、図9のステップS5において、図10の処理を行う場合について説明したが、これに限定されるものではない。例えば、以下に示す方法を使用することもできる。
【0035】
図14は、図9のステップS5における距離算出部15の処理の他の一例を示すフローチャートである。この図14のフローチャートは、ラフネスのないパターンを比較用のリファレンスパターンとして使用する場合を示している。
始めに、パターン形状計測装置10aの使用者は、計測対象パターンと比較するためのラフネスのないリファレンスパターンを入力する(ステップT1)。これにより、計測対象パターン入力部11は、リファレンスパターンを取得する。
そして、ステップT1で取得したリファレンスパターンの輪郭線を抽出する(ステップT2)。このステップT2の処理は、図9のステップS2の処理と同じである。次に、ステップT2で抽出した輪郭線に基づいて、重心座標を算出する(ステップT3)。このステップT3の処理は、図9のステップS3の処理と同じである。
そして、ステップT2で抽出した輪郭線と、ステップT3で算出した重心座標とに基づいて、重心距離情報を算出する(ステップT4)。このステップT4の処理は、図9のステップS4の処理と同じである。
【0036】
なお、図14のステップT1の処理において、リファレンスパターンとして、測定対象パターンの設計パターンを用いてもよい。ホール又はドットの設計パターンは通常、角が90度の矩形であるがフォトマスク又はウェハ上の実パターンは角が丸くなっているため、設計パターンの角に丸みをつけたものをリファレンスパターンとしてステップT1で入力する。
設計パターンの角の丸みは、CAD(Computer Aided Design)ソフトを用いて付加する。ホール又はドットパターンは、大きさや縦横比によってその角の丸み具合が異なるため、エッジラフネスを計測するパターンの角を予め計測して丸み具合を確認する。パターンの角は単純な円の弧に近い形状の場合もあれば、楕円の弧の形状になっている場合もある。CADソフトを用いて設計パターンの角に丸みを付加する際には、この角の丸み具合の情報を利用する。例えば、パターンの角が円弧に近い場合は、コーナーの半径の情報を入力し、パターンの角が楕円の弧に近い場合は、コーナーの縦・横の長さを入力することで、実際のパターンと同様な角の丸みを持つ設計パターンを生成する。
【0037】
次に、本発明の第2の実施形態によるパターン形状計測装置10bについて説明する。第2の実施形態は、比較用のリファレンスパターンを使わずに、信号処理手法によりラフネス値を算出する。
図15は、本発明の第2の実施形態によるパターン形状計測装置10bの構成の一例を示すブロック図である。このパターン形状計測装置10bは、計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、距離算出部21、フーリエ変換部22、高周波数成分抽出部23、逆フーリエ変換部24、ラフネス値算出部25、表示部15を有する。
計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、表示部15については、本発明の第1の実施形態によるパターン形状計測装置10a(図1)と同じであるので、それらの説明を省略する。
【0038】
距離算出部21は、輪郭線抽出部12から出力される輪郭線の情報と、重心算出部13から出力される重心の情報とに基づいて、2のn(nは正の整数)乗個の重心距離情報を算出する。ここで、重心距離データを2のn乗個とするのは、フーリエ変換の計算を行い易くするためである。例えば、隣り合う放射線のなす角度を2度として、計測対象パターン一周分で360度/2度=180個の重心距離情報を生成し、それに152度(約1/2.4周分)/2度=76個のデータを追加して256個とする。
【0039】
フーリエ変換部22は、距離算出部22から出力される重心距離についてフーリエ変換を行うことにより距離を周波数に変換し、その情報を高周波数成分抽出部23へ出力する。
高周波数成分抽出部23は、フーリエ変換部22から出力される周波数の情報から、高周波数成分を抽出し、逆フーリエ変換部24へ出力する。
逆フーリエ変換部24は、高周波数成分抽出部23から出力される周波数の情報について逆フーリエ変換を行うことにより周波数を距離に変換し、その情報をラフネス値算出部25へ出力する。
ラフネス値算出部25は、逆フーリエ変換部24から出力される距離の情報に基づいて、ラフネス値を算出し、そのラフネス値を表示部18へ出力する。ラフネス値は、逆フーリエ変換部24から出力される距離の情報について標準偏差の3σを計算することにより算出することができる。
【0040】
図16は、本発明の第2の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。ステップR1〜R3の処理は、第1の実施形態によるステップS1〜S3の処理と同じであるので、それらの説明を省略する。
ステップR3の後、距離算出部21は、ステップR2で抽出した輪郭線と、ステップR3で算出した重心とに基づいて、計測対象パターンにおける2のn乗個の重心距離を算出する(ステップR4)。
そして、フーリエ変換部22は、ステップR4で算出した2のn乗個の重心距離について、フーリエ変換を行うことにより、距離を周波数に変換する(ステップR5)。次に、高周波数成分抽出部23は、ステップR5で変換した周波数から、高周波成分のみを抽出する(ステップS6)。これにより、周波数が高い計測対象パターンについてラフネス値を算出することができる。
そして、逆フーリエ変換部24は、ステップR5で抽出した高周波成分の周波数について、逆フーリエ変換を行うことにより、周波数を距離に変換する(ステップR7)。これにより、計測対象パターンの全体的な形状を表す情報を除いたラフネス部分だけの情報を取得することができる。次に、ラフネス値算出部25は、ステップR7で変換した距離に基づいて、ラフネス値を算出する(ステップR8)。
【0041】
上述した本発明の第2の実施形態によれば、フォトマスクやウェハのホール又はドットパターンのエッジラフネスの計測において、パターン形状計測装置10bの使用者は、計測範囲を指定することなく計測対象パターンを計測対象パターン入力部11に入力するだけでエッジのラフネス値を算出することが可能となる。これにより、ホール又はドットパターンの迅速かつ高精度で安定したラフネス値の定量化が可能となる。
また、第1の実施形態では、計測対象パターン入力部11から計測対象パターンを入力し、距離算出部15にリファレンスパターンを入力する必要があったが、第2の実施形態では、計測対象パターン入力部11に計測対象パターンだけを入力すればよく、リファレンスパターンを入力する必要がないため、パターン形状計測装置10bの使用者の負担をより軽減することができる。
【0042】
なお、以上説明した実施形態において、図1又は図15の計測対象パターン入力部11、輪郭線抽出部12、重心算出部13、距離算出部14、距離算出部15、差分算出部16、ラフネス値算出部17、表示部18、距離算出部21、フーリエ変換部22、高周波数成分抽出部23、逆フーリエ変換部24、ラフネス値算出部25の機能又はこれらの機能の一部を実現するためのプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたプログラムをコンピュータシステムに読み込ませ、実行することによりパターン形状計測装置10a又はパターン形状計測装置10bの制御を行ってもよい。なお、ここでいう「コンピュータシステム」とは、OSや周辺機器等のハードウェアを含むものとする。
【0043】
また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROM等の可搬媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時刻の間、動的にプログラムを保持するもの、その場合のサーバやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時刻プログラムを保持しているものも含むものとする。また上記プログラムは、前述した機能の一部を実現するためのものであっても良く、さらに前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるものであっても良い。
【0044】
以上、この発明の実施形態について図面を参照して詳述してきたが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【図面の簡単な説明】
【0045】
【図1】本発明の第1の実施形態によるパターン形状計測装置10aの構成の一例を示すブロック図である。
【図2】計測対象パターン入力部11が取得する計測対象パターンの一例を示す顕微鏡写真である。
【図3】輪郭線抽出部12が抽出する、計測対象パターンにおける輪郭線a1の一例を示す図である。
【図4】重心算出部13が算出する、計測対象パターンにおける重心b1の一例を示す図である。
【図5】距離算出部14が算出する、計測対象パターンにおける重心距離c11、c12、c13、・・・の一例を示す図である。
【図6】距離算出部15が算出する、リファレンスパターンにおける輪郭線a2、重心b2、重心距離c21、c22、c23、・・・の一例を示す図である。
【図7】差分算出部16が、距離算出部14から取得する計測対象パターンにおける重心距離情報と、距離算出部15から取得するリファレンスパターンにおける重心距離情報とを示すグラフである。
【図8】差分算出部16が算出する差分情報の一例を示すグラフである。
【図9】本発明の第1の実施形態によるパターン形状計測装置10aの処理の一例を示すフローチャートである。
【図10】図9のステップS5における距離算出部15の処理の一例を示すフローチャートである。
【図11】図10のステップP3で生成される塗り潰しパターンの一例を示す図である。
【図12】図10のステップP4及びP5のオープニング処理及びクロージング処理について説明するための図である。
【図13】図10のステップP4〜P6の処理について説明するための図である。
【図14】図9のステップS5における距離算出部15の処理の他の一例を示すフローチャートである。
【図15】本発明の第2の実施形態によるパターン形状計測装置10bの構成の一例を示すブロック図である。
【図16】本発明の第2の実施形態によるパターン形状計測装置10bの処理の一例を示すフローチャートである。
【符号の説明】
【0046】
10a、10b・・・パターン形状計測装置、11・・・計測対象パターン入力部、12・・・輪郭線抽出部、13・・・重心算出部、14・・・距離算出部、15・・・距離算出部、16・・・差分算出部、17・・・ラフネス値算出部、18・・・表示部、21・・・距離算出部、22・・・フーリエ変換部、23・・・高周波数成分抽出部、24・・・逆フーリエ変換部、25・・・ラフネス値算出部
【特許請求の範囲】
【請求項1】
計測対象パターンを入力する計測対象パターン入力手段と、
前記計測対象パターンの輪郭線を抽出する輪郭線抽出手段と、
前記輪郭線の重心を算出する重心算出手段と、
前記輪郭線と前記重心との距離を算出する第1の距離算出手段と、
前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出手段と、
前記第1の距離算出手段が算出した距離と前記第2の距離算出手段が算出した距離との差分を算出する差分算出手段と、
前記差分からラフネス値を算出するラフネス値算出手段と、
を有することを特徴とするパターン形状計測装置。
【請求項2】
計測対象パターンを入力する計測対象パターン入力過程と、
前記計測対象パターンの輪郭線を抽出する第1の輪郭線抽出過程と、
前記輪郭線の重心を算出する重心算出過程と、
前記輪郭線と前記重心との距離を算出する第1の距離算出過程と、
前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出過程と、
前記第1の距離算出過程で算出した距離と前記第2の距離算出過程で算出した距離との差分を算出する差分算出過程と、
前記差分からラフネス値を算出するラフネス値算出過程と、
を有することを特徴とするパターン形状計測方法。
【請求項3】
前記第2の距離算出過程は、
前記計測対象パターンの輪郭線の内部を塗り潰すことにより塗り潰しパターンを生成する塗り潰しパターン生成過程と、
前記塗り潰しパターンに対して突起状の欠陥を除去するためのオープニング処理を行うオープニング処理過程と、
前記塗り潰しパターンに対して欠け状の欠陥を除去するためのクロージング処理を行うクロージング処理過程と、
前記オープニング処理及び前記クロージング処理を行った後の塗り潰しパターンから輪郭線を抽出する第2の輪郭線抽出過程と、
前記第2の輪郭線抽出過程で抽出した輪郭線の重心を算出する第2の重心算出過程と、
前記第2の輪郭線抽出過程で抽出した輪郭線と前記第2の重心算出過程で算出した重心との距離を算出する第3の距離算出過程と、
を含むことを特徴とする請求項2に記載のパターン形状計測方法。
【請求項4】
前記第2の距離算出過程は、
エッジラフネスのないリファレンスパターンを入力するリファレンスパターン入力過程と、
前記リファレンスパターン入力過程で入力したリファレンスパターンの輪郭線を抽出する第3の輪郭線抽出過程と、
前記第3の輪郭線抽出過程で抽出した輪郭線の重心を算出する第3の重心算出過程と、
前記第3の輪郭線抽出過程で抽出した輪郭線と前記第3の重心算出過程で算出した重心との距離を算出する第4の距離算出過程と、
を含むことを特徴とする請求項2に記載のパターン形状計測方法。
【請求項5】
前記リファレンスパターン入力過程で入力したリファレンスパターンの角に丸みを付ける丸み付加手段を更に有し、
前記第3の輪郭線抽出過程は、前記丸み付加手段が角に丸みを付けたリファレンスパターンの輪郭線を抽出することを特徴とする請求項4に記載のパターン形状計測方法。
【請求項6】
計測対象パターンを入力する計測対象パターン入力過程と、
前記計測対象パターンの輪郭線を抽出する輪郭線抽出過程と、
前記輪郭線の重心を算出する重心算出過程と、
前記重心と前記輪郭線との距離を2のn(nは正の整数)乗個算出する距離算出過程と、
前記距離算出過程で算出した2のn乗個の距離についてフーリエ変換を行うことにより距離を周波数に変換するフーリエ変換過程と、
前記周波数分析過程での分析結果に基づいて高周波成分を抽出する高周波成分抽出過程と、
前記高周波成分抽出過程で抽出した高周波成分について逆フーリエ変換を行うことにより周波数を距離に変換する逆フーリエ変換過程と、
前記逆フーリエ変換過程で変換した距離からラフネス値を算出するラフネス値算出過程と、
を有することを特徴とするパターン形状計測方法。
【請求項1】
計測対象パターンを入力する計測対象パターン入力手段と、
前記計測対象パターンの輪郭線を抽出する輪郭線抽出手段と、
前記輪郭線の重心を算出する重心算出手段と、
前記輪郭線と前記重心との距離を算出する第1の距離算出手段と、
前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出手段と、
前記第1の距離算出手段が算出した距離と前記第2の距離算出手段が算出した距離との差分を算出する差分算出手段と、
前記差分からラフネス値を算出するラフネス値算出手段と、
を有することを特徴とするパターン形状計測装置。
【請求項2】
計測対象パターンを入力する計測対象パターン入力過程と、
前記計測対象パターンの輪郭線を抽出する第1の輪郭線抽出過程と、
前記輪郭線の重心を算出する重心算出過程と、
前記輪郭線と前記重心との距離を算出する第1の距離算出過程と、
前記計測対象パターンと比較するためのリファレンスパターンの輪郭線とそのリファレンスパターンの輪郭線の重心との距離を算出する第2の距離算出過程と、
前記第1の距離算出過程で算出した距離と前記第2の距離算出過程で算出した距離との差分を算出する差分算出過程と、
前記差分からラフネス値を算出するラフネス値算出過程と、
を有することを特徴とするパターン形状計測方法。
【請求項3】
前記第2の距離算出過程は、
前記計測対象パターンの輪郭線の内部を塗り潰すことにより塗り潰しパターンを生成する塗り潰しパターン生成過程と、
前記塗り潰しパターンに対して突起状の欠陥を除去するためのオープニング処理を行うオープニング処理過程と、
前記塗り潰しパターンに対して欠け状の欠陥を除去するためのクロージング処理を行うクロージング処理過程と、
前記オープニング処理及び前記クロージング処理を行った後の塗り潰しパターンから輪郭線を抽出する第2の輪郭線抽出過程と、
前記第2の輪郭線抽出過程で抽出した輪郭線の重心を算出する第2の重心算出過程と、
前記第2の輪郭線抽出過程で抽出した輪郭線と前記第2の重心算出過程で算出した重心との距離を算出する第3の距離算出過程と、
を含むことを特徴とする請求項2に記載のパターン形状計測方法。
【請求項4】
前記第2の距離算出過程は、
エッジラフネスのないリファレンスパターンを入力するリファレンスパターン入力過程と、
前記リファレンスパターン入力過程で入力したリファレンスパターンの輪郭線を抽出する第3の輪郭線抽出過程と、
前記第3の輪郭線抽出過程で抽出した輪郭線の重心を算出する第3の重心算出過程と、
前記第3の輪郭線抽出過程で抽出した輪郭線と前記第3の重心算出過程で算出した重心との距離を算出する第4の距離算出過程と、
を含むことを特徴とする請求項2に記載のパターン形状計測方法。
【請求項5】
前記リファレンスパターン入力過程で入力したリファレンスパターンの角に丸みを付ける丸み付加手段を更に有し、
前記第3の輪郭線抽出過程は、前記丸み付加手段が角に丸みを付けたリファレンスパターンの輪郭線を抽出することを特徴とする請求項4に記載のパターン形状計測方法。
【請求項6】
計測対象パターンを入力する計測対象パターン入力過程と、
前記計測対象パターンの輪郭線を抽出する輪郭線抽出過程と、
前記輪郭線の重心を算出する重心算出過程と、
前記重心と前記輪郭線との距離を2のn(nは正の整数)乗個算出する距離算出過程と、
前記距離算出過程で算出した2のn乗個の距離についてフーリエ変換を行うことにより距離を周波数に変換するフーリエ変換過程と、
前記周波数分析過程での分析結果に基づいて高周波成分を抽出する高周波成分抽出過程と、
前記高周波成分抽出過程で抽出した高周波成分について逆フーリエ変換を行うことにより周波数を距離に変換する逆フーリエ変換過程と、
前記逆フーリエ変換過程で変換した距離からラフネス値を算出するラフネス値算出過程と、
を有することを特徴とするパターン形状計測方法。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−263899(P2007−263899A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−92607(P2006−92607)
【出願日】平成18年3月30日(2006.3.30)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月30日(2006.3.30)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
[ Back to top ]